Mecatronica

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Mecatronica

Un sistem mecatronic este un ansamblu sinergetic ce cuprine o structura mecanica, unitati de achizitie si prelucrare a datelor, dispozitive electronice, sisteme de control automat, eventual un calculator.
Pentru ca partea mecanica sa fie pusa in miscare, sistemul de control automat trebuie cuplat cu partea mecanica printr-un sistem de actionare.
Pentru actionarea structurilor mecatronice se utilizeaza atat metode si dipozitive clasice (motoare electrice de current continuu sau alternative, motoare pas cu pas, actuatoare pneumatice sau hidraulice) cat si metode si dispozitive care, prin noutate, se pot numi neconventionale (actuatoare electrostatice, actuatoare cu polimeri electroactivi, actuatoare bazate pe lichide electro sau magnetorheologice, actuatoare bazate pe materiale inteligente).
Daca prin actuator se intelege acel dispozitiv care accepta la intrare o marime de control (cel mai adesea un semnal electric) si produce o schimbare in sistemul fizic, generand o forta, o miscare, caldura, un flux, etc., atunci dispozitivele clasice de actionare formeaza o submultime a actuatoarelor.
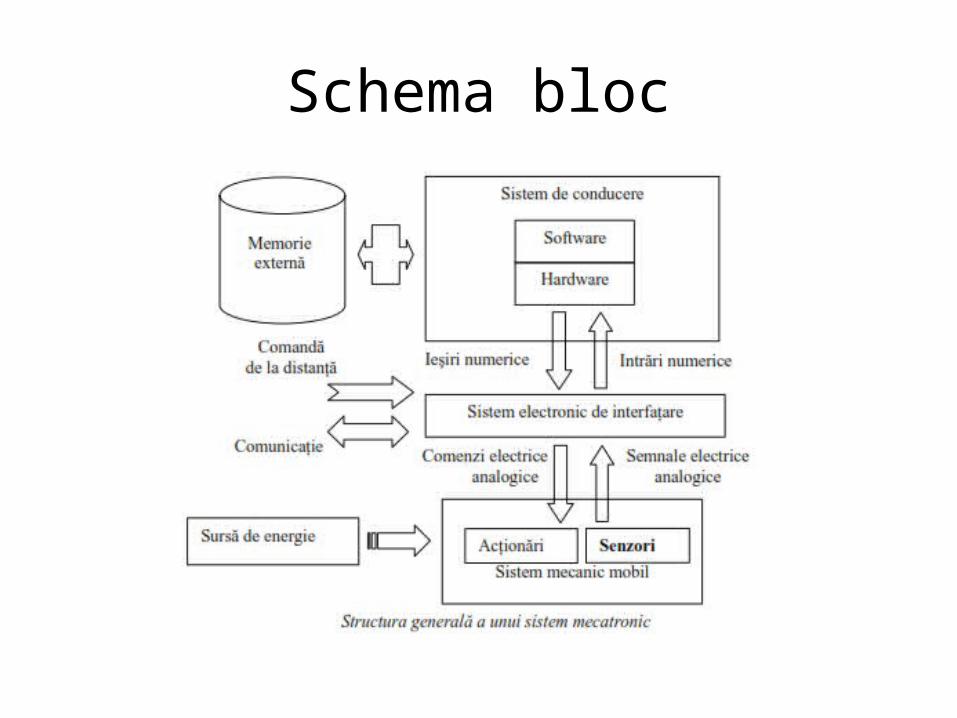
Schema bloc

Automate programabile
• Definitie. Un automat programabil a fost definit de Capiel (în 1982) ca fiind: "un sistem electronic operând digital, proiectat pentru utilizarea în mediul industrial, care utilizeaza o memorie programabila pentru memorarea interna de instructiuni pentru implementarea unor functii specifice precum functii logice, secventiale, temporizari, contorizari si functii aritmetice, pentru a controla, prin intermediul modulelor de intrare/iesire digitale sau analogice, diverse tipuri de masini si procese".


PAC functii
• Procesare – microprocesor pe 8, 16 sau 32 biti• Achizitie de date – module AI, DI• Control – AO, DO• Stocare date – memorie interna, flash externa• Comunicatie – Serial, Ethernet, Wi-Fi• Interfata – local HMI

Achizitia marimilor analogice
• Nivel• Forma• Frecventa

Lantul de masura
1. Semnal2. Amplificator extern3. Perturbatii externe4. Amplificator de instrumentatie5. ADC – convertor analog digital

Parametrii achizitiei
• Raportul semnal/zgomot (cat mai mare mai bine)
• Liniarizare• Excitarea traductorului• Izolarea• Filtrarea• Rata de esantionare

ADC –convertorul analog digital
• Rezolutia – 8, 12, 14, 16, 18, 24 biti• Domeniul de intrare• Amplificarea• Eroarea de cuantizare
𝑐𝑤=𝑑𝑜𝑚𝑒𝑛𝑖𝑢𝑙 𝑑𝑒𝑖𝑛𝑡𝑟𝑎𝑟𝑒𝑎𝑚𝑝𝑙𝑖𝑓𝑖𝑐𝑎𝑟𝑒𝑥 2𝑟𝑒𝑧𝑜𝑙𝑢𝑡𝑖𝑒

Reprezentarea in binar
• Un numar decimal este reprezentat in forma binara , un sir de numere 0 sau 1
𝑎10=𝑎𝑏𝑐𝑑𝑒….=𝑎× 20+𝑏×21+𝑐×22+𝑑× 23+…
13=1101
• Reprezentarea in binar se poate face pe un numar oarecare de biti n (8, 12, 14, …..), rezultant o valoare maxim posibil de reprezentat:
-1

Rezolutia
Reprezentare pe 3 biti
𝑐𝑤=10
23 =1.25 𝑐𝑤=20
23 =2.5

Actuatoare
• actuatoare electrice - acestea sunt: diode, tiristoare, tranzistoare biplolare, triace, MOSFET-uri de putere- caracteristici: realizate in tehnologii specifice electronicii, raspuns bun la frecventa inalta, consum mic de putere• actuatoare electromecanice - motoare de curent continuu- motoare de curent alternativ- motoare pas cu pas

Actuatoare• actuatoare electromagnetice - dispozitive tip solenoid: forte mari, fiabilitate mica, relee, electromagneti: control on/off• actuatoare hidraulice si pneumatice - cilindri: pentru miscare liniara , motoare hidraulice, motoare pneumatice- valve• actuatoare cu materiale inteligente - piezoelectrice si electrostrictive: miscari de amplitudine mica dar cu frecventa mare, tensiune mare si curent mic de excitatie, rezolutie mare- magnetostrictive: miscari cu amplitudini mici dar la frecvente mari, tensiune mica si curent mare de excitatie- cu materiale cu memorie: tensiune mica si curent mare de excitatie, frecventa mica si amplitudine mare a miscarii• micro si nanoactuatoare- micromotoare: utilizate in sisteme micromecanice- microvalve: utilizeaza tehnologia de procesare cu siliciu (ca motorul
electrostatic) - micropompe: utilizeaza orice tip de material inteligent

SenzoriTermeni specifici relativ la senzori si la sistemele care includ senzori: • - eroarea (error) – este diferenta dintre valoarea masurata, furnizata de senzor si valoarea reala, cunoscuta pe alta • cale. Erorile sunt grupate in doua categorii: serori sistematice si erori aleatoare• - acuratetea (accuracy) – este invers proportionala cu eroarea. Un senzor de mare acuratete va produce erori mici.• - Repetabilitatea (repeatability) – este abilitatea senzorului de a furniza aceeasi acuratete pentru un numar mare • de masurari repetate, sau altfel spus, de a furniza aceeasi iesire pentru o aceeasi intrare• - Rezolutia (resolution) – cea mai mica variatie a marimii de intrare care poate fi sesizata de senzor• - Domeniul (range) – reprezinta plaja de valori intre care poate lucra senzorul si care este precizata prin valoarea • minima si valoarea mazima• - Sensibilitatea (sensitivity) – este definita ca schimbarea marimii de iesire determinate de schimbarea cu o unitate • a marimii de intrare. Pentru un senzor numeric aceasta caracteristica este similara cu rezolutia.• - Eroarea de histerezis – este eroarea datorata faptului ca marimea masurata furnizata de senzor este diferita • pentru cazul in care marimea reala de intrare creste fata de cazul in care marimea reala de intrare scade.• - Liniaritatea (liniarity) – este proprietatea senzorului de a furniza o marime de iesire care depinde liniar de • marimea de intrare
Utilizarea informatiei senzoriale
Informatia furnizata de senzori poate fi utilizata in moduri diferite in functie de tipul sistemului in care senzorii • sunt inclusi:• - monitorizarea proceselor• - controlul proceselor • - analiza datelor experimentale

Scalarea
• Iesirea traductorului se face in semnal unificat (tensiune sau curent)
• Legea de scalare este liniara y=ax+b
• Exemplu: un senzor de temperatura are domeniul de masura -50 +500°C, iar semnalul de iesire este 0-1V.
→

Termocupla
• K - 41 µV/°C, cea mai folosita , −200 °C pana la +1350 °C
• E - 68 µV/°C (folosita des in masurarea temperaturilor criogenice) −50 to 740 °C
• J - 55 µV/°C• N - 39 µV/°C la 900 °C• Platina – B, R, S (pt temp foarte inalte)

Intrari/iesiri digitale DO/DI• Semnale de tip TTL - Semnale de putere mica (tensiune maxima
4.75-5.25V)Pentru iesiri digitale:
µAPentru intrari digitale:
µA

Comanda digitala cu releu• Tipuri – electromecanice, relee reed, statice si
FET

SPST SPDT
DPDT
Capacitatea de rupere (functie de tensiune)Durata de viata Timpul de comutarePuterea ceruta

Motorul de curent continuu prezinta o deosebita importanta in actionarile de reglaj de viteza avand o tot mai larga dezvoltare atat ca fabricatie cat si ca utilizare.
Aceste motoare sunt din ce in ce mai utilizate in tractiunea electrica, actionarea masinilor unelte in metalurgie, instalatii de transport si ridicat, etc.

Motorul de curent continuu este alcatuit din 2 elemente constructive principale:
STATOR
ROTOR

Principiul de functionare In stator se afla infasurarea de excitatie care va produce un camp magnetic constant produs de niste electromagneti alimentati in curent continuu sau de niste magneti permanenti.

Dupa modul de conectare a circuitului de excitatie cu indusul, motoarele de curent continuu se impart in:• Motoare cu excitatie separata
• Motoare cu excitatie derivatie
• Motoare cu excitatie serie
• Motoare cu excitatie mixta

Motorul de curent continuu este utilizat in special pentru aplicatiile unde viteza trebuie varieze sau turatia sa fie controlata cu o foarte mare precizie. Turatia motorului de curent continuu se poate modifica prin:• inserierea cu rortorul a unui reostat de reglaj R, obtinand turatii mai mici decat cea nominala (ex. pentru excitatie separata fig.1) • scaderea fluxului inductor obtinand turatii mai mari decat cea nomainala(ex. pentru excitatie separata fig.2)• scaderea tensiunii de alimentare rotorice, obtinand turatii mai mici decat cea nomainala(ex. pentru excitatie separata fig.2)

Modificarea turatiei prin PWM
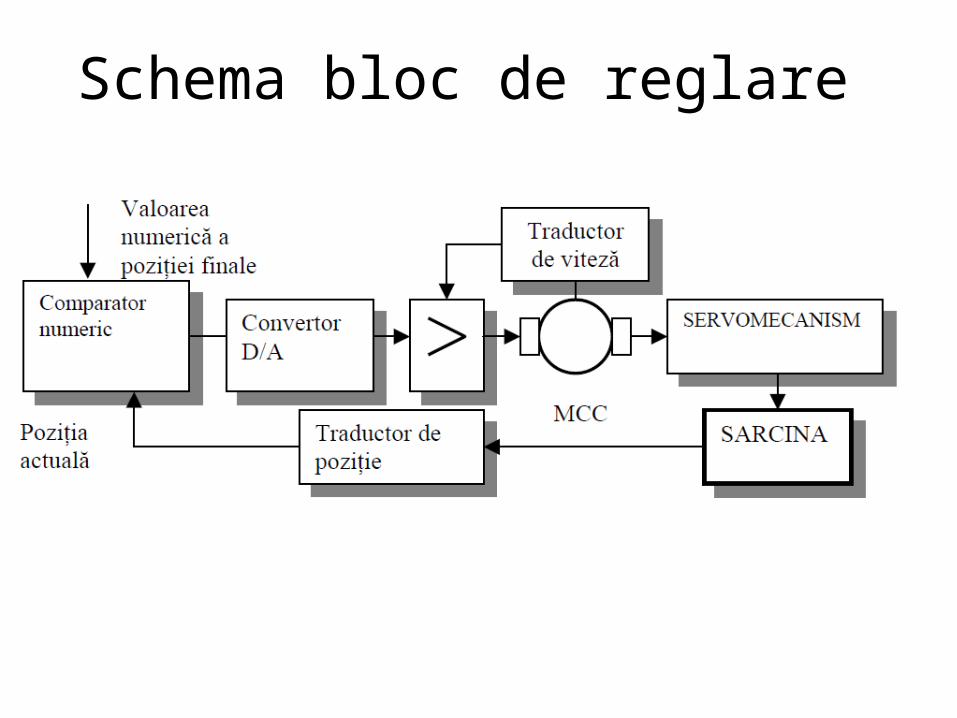
Schema bloc de reglare

Comunicatii seriale si protocoale de comunicatie seriala
• RS232• RS485, RS422• CAN• Profibus

RS232

Bit start
Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7 Bit paritate
Bit stop
Transmitted Data (TD): Unul dintre cele două semnale de date. Acest semnal este generat de DTE şi recepţionat de DCE.Received Data (RD): Cel de-al doilea semnal de date. Acest semnal este generat de DCE şi recepţionat de DTE.Request To Send (RTS): Când sistemul gazdă (DTE) este pregătit să trimită date sistemului periferic (DCE), RTS este ON. În sistemele simplex şi duplex, această condiţie menţine DCE-ul în mod de recepţie. În sistemele half-duplex, această condiţie menţine DCE-ul în mod de recepţie şi dezactivează posibilitatea de a transmite. Pentru ca DCE-ul să fie pe mod transmisie, RTS trebuie să fie OFF.Clear To Send (CTS): CTS este folosit împreună cu RTS pentru a realiza handshaking-ul între cele două echipamente. După ce DCE-ul primeşte semnalul RTS, trimite CTS când este gata de a începe comunicarea.Data Set Ready (DSR): Acest semnal este pus de DCE pe poziţia ON pentru a indica că este conectat la linia de comunicaţie.Data Carrier Detect (DCD): Acest semnal este ON cand DCE-ul primeşte semnale corespunzătoare, compatibile cu criteriile sale. DCD rămâne ON atât timp cât purtătorul de semnal poate fi detectat.Data Terminal Ready (DTR): DTR indică disponibilitatea echipamentului DTE. Semnalul este pus ON de către DTE când este pregătit de a transmite sau recepţiona. DTR trebuie să fie ON înainte ca echipamentul DCE să activeze DSR.Ring Indicator (RI): Este folosit in cazul comunicaţiei cu un modem. RI indică prezenţa unui apel pe linia telefonică de comunicaţie.

RS485• Comunicatie seriala pe 2, 3 sau 4 fire• Distante lungi
RS232
ModBus/RS485

Notiuni de sisteme automate
Functie de transferH
Intrare xIesire y
𝑦=𝐻∗𝑥
𝐻=𝑎
𝑠+𝑏
𝐻=𝜔
𝑠2+2𝛾𝜔 𝑠+𝜔2
Element de ordinul 1
Element de ordinul 2
Related Documents










