ME559(EE587) Nonlinear Control and Stability Chapter 01: Introduction to Nonlinear Dynamical Systems The topic of this course is analysis and control of nonlinear dynamical systems. The term “nonlinear” is interpreted in primarily two ways, namely, “not linear” and “not necessarily linear.” The latter meaning is intended here. There are several important differences between linear systems and nonlinear systems. The main difference is that a linear system is governed by the principle of superposition, i.e., L(cx + y)= cL(x)+ L(y), where L is a linear operator; the scalar c belongs to field of the vector space V ; and x, y ∈ V ; there are other differences that accrue from inapplicability of the principle of superposition. For example, a closed-form solution always exists for a set of finite-dimensional linear time-invariant (FDLTI) differential equations; however, this may not be true for a set of nonliear ordinary differential equations. Therefore, it is desirable to obtain a model that yields an approximate solution of the governing equations of a nonlinear dynamical system for the purpose of stability analysis and control. 1 Rudimentary Concepts The general structure for a nonlinear dynamical system in the continuous-time setting is represented as: ˙ x(t)= f [t, x(t),u(t)] ∀t ≥ 0 (1) where t ∈ R + [0, ∞) denotes time; x(t) ∈ R n , where n ∈ N {1, 2, 3, ···}, denotes the state at time t; the input at time t is denoted by u(t) ∈ R m with m ∈ N and m ≤ n. Thus, f : R + × R n × R m → R n . The discrete-time representation of Eq. (1) is a nonlinear map: x k+1 = ϕ k [x k ,u k ] ∀k (2) where k ∈ N 0 {0, 1, 2, 3, ···} denotes instants of discrete time; x k ∈ R n denotes the state at instant k; the input u k ∈ R m , where m ∈ N and m ≤ n, is the input at instant k. Thus ϕ k : R n × R m → R n for all k ∈ N 0 . Next we introduce a few definitions for commonly used terms. Definition 1.1. A dynamical system in Eq. (1) (resp. Eq. (2)) is called forced if the input u(t) serves as the forcing function. The system is called unforced if u(t)=0 ∀t ≥ 0 (resp. u k =0 ∀k ≥ 0). 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

ME559(EE587) Nonlinear Control and Stability
Chapter 01: Introduction to Nonlinear Dynamical Systems
The topic of this course is analysis and control of nonlinear dynamical systems.
The term “nonlinear” is interpreted in primarily two ways, namely, “not linear” and
“not necessarily linear.” The latter meaning is intended here. There are several
important differences between linear systems and nonlinear systems. The main
difference is that a linear system is governed by the principle of superposition, i.e.,
L(cx + y) = cL(x) + L(y), where L is a linear operator; the scalar c belongs to
field of the vector space V ; and x, y ∈ V ; there are other differences that accrue
from inapplicability of the principle of superposition. For example, a closed-form
solution always exists for a set of finite-dimensional linear time-invariant (FDLTI)
differential equations; however, this may not be true for a set of nonliear ordinary
differential equations. Therefore, it is desirable to obtain a model that yields an
approximate solution of the governing equations of a nonlinear dynamical system
for the purpose of stability analysis and control.
1 Rudimentary Concepts
The general structure for a nonlinear dynamical system in the continuous-time
setting is represented as:
x(t) = f [t, x(t), u(t)] ∀t ≥ 0 (1)
where t ∈ R+ , [0,∞) denotes time; x(t) ∈ Rn, where n ∈ N , 1, 2, 3, · · · ,
denotes the state at time t; the input at time t is denoted by u(t) ∈ Rm with m ∈ N
and m ≤ n. Thus, f : R+ × Rn × R
m → Rn.
The discrete-time representation of Eq. (1) is a nonlinear map:
xk+1 = ϕk[xk, uk] ∀k (2)
where k ∈ N0 , 0, 1, 2, 3, · · · denotes instants of discrete time; xk ∈ Rn denotes
the state at instant k; the input uk ∈ Rm, where m ∈ N and m ≤ n, is the input
at instant k. Thus ϕk : Rn × Rm → R
n for all k ∈ N0. Next we introduce a few
definitions for commonly used terms.
Definition 1.1. A dynamical system in Eq. (1) (resp. Eq. (2)) is called forced
if the input u(t) serves as the forcing function. The system is called unforced if
u(t) = 0 ∀t ≥ 0 (resp. uk = 0 ∀k ≥ 0).
1

Definition 1.2. A dynamical system in Eq. (1) (resp. Eq. (2)) is called autonomous
if the function f does not explicitly depend on the time parameter t (resp. the
function ϕ does not explicitly depend on the time index k); otherwise the dynamical
system is called non-autonomous.
Definition 1.3. In an unforced dynamical system in Eq. (1) with u(t) = 0 ∀t ≥ 0
(resp. Eq. (2) with uk = 0 ∀k ≥ 0), a state xe at a time τ ≥ 0 (resp. xe at an
instant κ ≥ 0) is called an equilibrium if
f(t, xe) = 0 ∀t ≥ τ (resp. ϕ(k, xe) = 0 ∀k ≥ κ) (3)
Remark 1.1. Many properties that are taken as granted for linear (especially
linear time-invariant) systems do not hold for nonlinear systems, which is one of
the the major challenges in nonlinear systems analysis. A few of these properties
are elucidated below.
1. Existence of a solution; Eq. (1) (resp. Eq. (2)) has at least one solution.
2. Local existence and uniqueness of the solution; Eq. (1) (resp. Eq. (2)) has
exactly one solution for sufficiently small increment of time, i.e., (tf − to)
(resp. (kf − k0)) is small.
3. Global existence and uniqueness of the solution; Eq. (1) (resp. Eq. (2)) has
exactly one solution for all time t ∈ [0,∞) (resp. k ∈ N0)).
4. Well-posedness, i.e., a unique solution and its continuous dependence on the
initial condition: Eq. (1) (resp. Eq. (2)) for all time t ∈ [0,∞) (resp. k ∈N0) has exactly one solution that is continuously dependent on the initial
cobdition.
Example 1.1. Consider the scalar differential equation
x(t) = −sgn x(t) ∀t ≥ 0 and x(0) = 0
where
sgn θ ,
1 if θ ≥ 0
−1 if θ < 0
No continuously differentiable function x(t) exists as a solution of the above
differential equation. None of the above four statements hold.
Example 1.2. Consider the scalar differential equation
x(t) =1
2x(t)∀t ≥ 0 and x(0) = 0
The above equation yields two solutions, namely, x(t) = ±√t. Statement 1 is true
but the statement 2 is false.
Example 1.3. Consider the scalar differential equation
x(t) = 1 + x2(t) ∀t ≥ 0 and x(0) = 0
2

over the interval [0, 1), the above equation has a unique solution x(t) = tan t, but
there is no continuously differentiable function x(t) defined over the entire interval
[0,∞) such that the above differential equation holds. This is so because as t → π/2,
the solution x(t) → ∞; this phenomenon is known as finite escape time, which
does not occur in linear systems. Locally, there is a unique solution but there is no
global solution.
2 Second-order Nonlinear Dynamical Systems
Two-dimensional periodic orbits in R2 are special in the sense that they divide the
phase plane (in R2) into a region inside a closed curve and another region outside
it. This fact leads to the development of criteria for detection of presence or ab-
sence of periodic orbits for second-order systems. Commonly known are Bendixson,
Poincare-Bendixson, and Index criteria that are briefly introduced in this section.
Example 2.1. Hill’s equation (e.g., oscillations in a varying-stiffness coil)
y(t) + ω2(t)y(t) = 0
where ω is T -periodic, i.e., ω(t) = ω(t+T ) for a given T ∈ (0,∞). Notice that this
is a time-varying linear differential equation.
Let ω2(t) = [1 + ε cos(Ωt)]ω2o , which implies that
y(t) + [1 + ε cos(Ωt)]ω2o ] y(t) = 0
This known as Mathieu equation, for which an example is a child moving his/her
legs while swinging on a swing set. We often classify this type of problems as
parametrically excited oscillations.
Example 2.2. Unforced Duffing equation (e.g., oscillations of a nonlinear spring)
y(t) + α1y(t) + α3y3(t) = 0 for t ≥ 0; initial condition y(0) = 1, y(0) = 0
The above equation yields approximate solutions in the following range:
y(t, α3) ∼ cos(t) =[3
8t sin(t)+
1
32
(
cos(t)−cos(3t))
]
α3 for α1 = 1 and 0 < α3 ≪ 1.
Example 2.3. Forced Duffing equation (e.g., chaotic motion)
y(t)+βy(t)+α1y(t)+α3y3(t) = A cos(Ω t) for t ≥ 0; initial condition y(0) = 1, y(0) = 0.
Simulate the above equation for the following parameters to yield chaotic motion:
β = 0.05, α1 = 0, α3 = 1, A = 7.5, and Ω = 1.
Example 2.4. Unforced van der Pol equation (e.g., sustained oscillations)
y(t) + µ(y2(t)− 1)ω0 y(t) + ω20y(t) = 0 for t ≥ 0
For µ > 0, the above equation yields a stable limit cycle and the approximate radius
of the limit cycle is 2 if ω0 = 1.
3
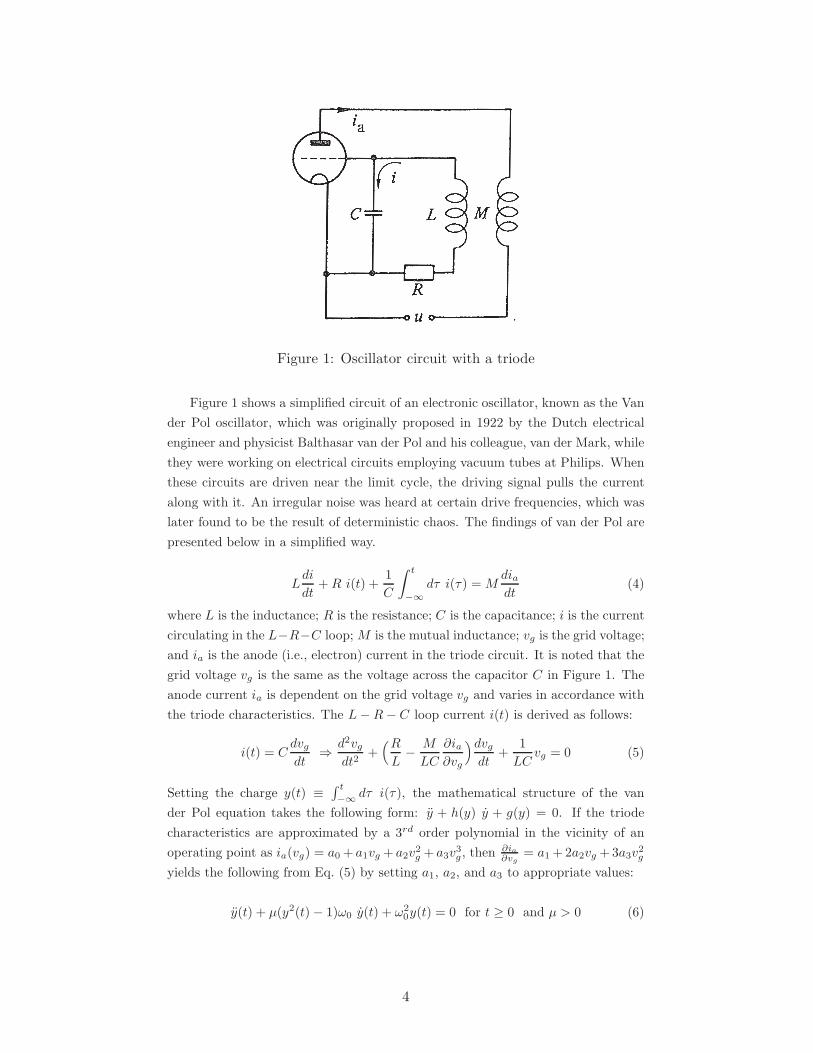
Figure 1: Oscillator circuit with a triode
Figure 1 shows a simplified circuit of an electronic oscillator, known as the Van
der Pol oscillator, which was originally proposed in 1922 by the Dutch electrical
engineer and physicist Balthasar van der Pol and his colleague, van der Mark, while
they were working on electrical circuits employing vacuum tubes at Philips. When
these circuits are driven near the limit cycle, the driving signal pulls the current
along with it. An irregular noise was heard at certain drive frequencies, which was
later found to be the result of deterministic chaos. The findings of van der Pol are
presented below in a simplified way.
Ldi
dt+R i(t) +
1
C
∫ t
−∞
dτ i(τ) = Mdiadt
(4)
where L is the inductance; R is the resistance; C is the capacitance; i is the current
circulating in the L−R−C loop; M is the mutual inductance; vg is the grid voltage;
and ia is the anode (i.e., electron) current in the triode circuit. It is noted that the
grid voltage vg is the same as the voltage across the capacitor C in Figure 1. The
anode current ia is dependent on the grid voltage vg and varies in accordance with
the triode characteristics. The L−R− C loop current i(t) is derived as follows:
i(t) = Cdvgdt
⇒ d2vgdt2
+(R
L− M
LC
∂ia∂vg
)dvgdt
+1
LCvg = 0 (5)
Setting the charge y(t) ≡∫ t
−∞dτ i(τ), the mathematical structure of the van
der Pol equation takes the following form: y + h(y) y + g(y) = 0. If the triode
characteristics are approximated by a 3rd order polynomial in the vicinity of an
operating point as ia(vg) = a0 + a1vg + a2v2g + a3v
3g , then
∂ia∂vg
= a1+2a2vg +3a3v2g
yields the following from Eq. (5) by setting a1, a2, and a3 to appropriate values:
y(t) + µ(y2(t)− 1)ω0 y(t) + ω20y(t) = 0 for t ≥ 0 and µ > 0 (6)
4











Related Documents











