ME 486 - ME 486 - Automation Automation Networks, Signals, & I/O by Ed Red Factory Level Cell Level Field Level B us C ycle Time < 1000 m s B us C ycle Time < 100 m s B us C ycle Time < 10 m s M M S,TC P/IP B ackbone Profibus-FM S Profibus-D P Profibus-P A I/O D rive Valves Field Device Trans- m itter Field Device A rea C ontroller

ME 486 - Automation Networks, Signals, & I/O by Ed Red Networks, Signals, & I/O by Ed Red.
Dec 23, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Networks, Signals, & I/Oby
Ed Red
Networks, Signals, & I/Oby
Ed Red
FactoryLevel
CellLevel
FieldLevel
Bus CycleTime
< 1000 ms
Bus CycleTime
< 100 ms
Bus CycleTime
< 10 ms
MMS, TCP/IP Backbone
Profibus-FMS
Profibus-DP Profibus-PA
I/ODrive ValvesField
DeviceTrans-mitter
FieldDevice
AreaController
FactoryLevel
CellLevel
FieldLevel
Bus CycleTime
< 1000 ms
Bus CycleTime
< 100 ms
Bus CycleTime
< 10 ms
MMS, TCP/IP Backbone
Profibus-FMS
Profibus-DP Profibus-PA
I/ODrive ValvesField
DeviceTrans-mitter
FieldDevice
AreaController

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Networks Networks
Computers in a factory use Local Area Networks (LAN's), ranging from feet to miles, to communicate with each other. Devices like PLC's, CNC machines, robots, data collection devices, vision systems, etc., communicate maintenance and monitoring data, schedules, process programs, and I/O.
Reference site:http://www.wmpenn.edu/PennWeb/Academic/ArtsTech/CompSci/Networks/LAN-Overview/Lanover.html
Computers in a factory use Local Area Networks (LAN's), ranging from feet to miles, to communicate with each other. Devices like PLC's, CNC machines, robots, data collection devices, vision systems, etc., communicate maintenance and monitoring data, schedules, process programs, and I/O.
Reference site:http://www.wmpenn.edu/PennWeb/Academic/ArtsTech/CompSci/Networks/LAN-Overview/Lanover.html

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Network topologies Network topologies
Star network - Central station handlesall communications between computer stations.
Ring network ‑ Stations are connected in continuous ring, requiring that messages be relayed between stations until the message gets to the right station. Messages must carry a station address.
Bus network ‑ Consists of a single transmission line to which stations attached. This type is used in Ethernets, and most commonly used in factories today.
Star network - Central station handlesall communications between computer stations.
Ring network ‑ Stations are connected in continuous ring, requiring that messages be relayed between stations until the message gets to the right station. Messages must carry a station address.
Bus network ‑ Consists of a single transmission line to which stations attached. This type is used in Ethernets, and most commonly used in factories today.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Network access Network access
Star network access - central station coordinates communication
Ring and bus access - two access methods:
1) token passing
2) carrier‑sensed multiple access with collision detection (CSMA/CD).
In the token method a token (code) is passed from station to station, with only those stations knowing the code having the right to access the message. In the CSMA/CD method each station waits until the network is clear until it sends a message. Any failure (such as collisions with other message packets) will result in a retry.
Star network access - central station coordinates communication
Ring and bus access - two access methods:
1) token passing
2) carrier‑sensed multiple access with collision detection (CSMA/CD).
In the token method a token (code) is passed from station to station, with only those stations knowing the code having the right to access the message. In the CSMA/CD method each station waits until the network is clear until it sends a message. Any failure (such as collisions with other message packets) will result in a retry.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Network communications Network communications
Twisted pair ‑ Two or more copper wires twisted along length of line. Noise susceptibility, and low bandwidth, but inexpensive. Used in phone lines, but not usually in factory floor networks.
Coaxial Cable ‑ One or more strands of wire shielded by outer metal shield, then covered with insulation - high bandwidth, noise resistant, and typically used in factory networks.
Fiber Optics ‑ Continuous optical fibers of glass or other material which can transmit light - high bandwidth, impervious to noise, but expensive. Requires mode conversion between electrical mode to light mode.
Wireless – Wireless high frequency transmission of data.
Twisted pair ‑ Two or more copper wires twisted along length of line. Noise susceptibility, and low bandwidth, but inexpensive. Used in phone lines, but not usually in factory floor networks.
Coaxial Cable ‑ One or more strands of wire shielded by outer metal shield, then covered with insulation - high bandwidth, noise resistant, and typically used in factory networks.
Fiber Optics ‑ Continuous optical fibers of glass or other material which can transmit light - high bandwidth, impervious to noise, but expensive. Requires mode conversion between electrical mode to light mode.
Wireless – Wireless high frequency transmission of data.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
OSI network protocol specOSI network protocol spec
1. Physical layer. This layer is concerned with the transmission of raw bits across the network lines. It defines the data transmission rate and the type of transmission medium.
2. Data link layer. This layer is concerned with the transfer of units of data across the local area network. It deals with the resolution of contentions when two devices are attempting to transmit at the same time, the size of the units of data, detection and correction of errors in data transmission, etc.
3. Network layer. The network layer is concerned with the routing of packets of data from source nodes to receiving nodes throughout the network It stores and relays data traveling between the nodes in the network as part of this function.
1. Physical layer. This layer is concerned with the transmission of raw bits across the network lines. It defines the data transmission rate and the type of transmission medium.
2. Data link layer. This layer is concerned with the transfer of units of data across the local area network. It deals with the resolution of contentions when two devices are attempting to transmit at the same time, the size of the units of data, detection and correction of errors in data transmission, etc.
3. Network layer. The network layer is concerned with the routing of packets of data from source nodes to receiving nodes throughout the network It stores and relays data traveling between the nodes in the network as part of this function.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
4. Transport layer. This layer is responsible for the reliable delivery of data from originating device to destination device in the network. It works with layer 3 in order to accomplish this function.
5. Session layer. The function of the session layer is to support an orderly dialogue between devices using the network. It deals with network security issues, re-synchronizing the data in the event of a transmission failure. and similar problems.
6. Presentation layer. This layer is concerned with negotiating syntax and format for the data exchange between the sending and receiving devices. One way of accomplishing this is to require all devices to encode data in a common format.
4. Transport layer. This layer is responsible for the reliable delivery of data from originating device to destination device in the network. It works with layer 3 in order to accomplish this function.
5. Session layer. The function of the session layer is to support an orderly dialogue between devices using the network. It deals with network security issues, re-synchronizing the data in the event of a transmission failure. and similar problems.
6. Presentation layer. This layer is concerned with negotiating syntax and format for the data exchange between the sending and receiving devices. One way of accomplishing this is to require all devices to encode data in a common format.
OSI network protocol specOSI network protocol spec

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
7. Application layer. This layer provides the interface with the user for specific applications. These applications deal with problems such as transfer of files between devices, remote job entry, message handling, access of files located at one device from another device. etc.
7. Application layer. This layer provides the interface with the user for specific applications. These applications deal with problems such as transfer of files between devices, remote job entry, message handling, access of files located at one device from another device. etc.
OSI network protocol specOSI network protocol spec

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
7. Application layer. This layer provides the interface with the user for specific applications. These applications deal with problems such as transfer of files between devices, remote job entry, message handling, access of files located at one device from another device. etc.
7. Application layer. This layer provides the interface with the user for specific applications. These applications deal with problems such as transfer of files between devices, remote job entry, message handling, access of files located at one device from another device. etc.
OSI network protocol specOSI network protocol spec

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Serial communicationsSerial communications
1 The UART: What it is and how it works
The Universal Asynchronous Receiver/Transmitter (UART) controller is the key component of the serial communications subsystem of a computer. The UART takes bytes of data and transmits the individual bits in a sequential fashion. At the destination, a second UART re-assembles the bits into complete bytes.
Serial transmission is commonly used with modems and for non-networked communication between computers, terminals and other devices.
Copyright © 1996 Frank Durda IV <[email protected]>, All Rights Reserved. 13 January 1996.
UART
UART

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
OSI network protocol specOSI network protocol spec1.2 Asynchronous Serial TransmissionAsynchronous transmission allows data to be transmitted without the sender having to send a clock signal to the receiver. Instead, the sender and receiver must agree on timing parameters in advance and special bits are added to each word which are used to synchronize the sending and receiving units.When a word is given to the UART for Asynchronous transmissions, a bit called the "Start Bit" is added to the beginning of each word that is to be transmitted. The Start Bit is used to alert the receiver that a word of data is about to be sent, and to force the clock in the receiver into synchronization with the clock in the transmitter. These two clocks must be accurate enough to not have the frequency drift by more than 10% during the transmission of the remaining bits in the word.
After the Start Bit, the individual bits of the word of data are sent, with the Least Significant Bit (LSB) being sent first. Each bit in the transmission is transmitted for exactly the same amount of time as all of the other bits, and the receiver “looks” at the wire at approximately halfway through the period assigned to each bit to determine if the bit is a 1 or a 0. For example, if it takes two seconds to send each bit, the receiver will examine the signal to determine if it is a 1 or a 0 after one second has passed, then it will wait two seconds and then examine the value of the next bit, and so on.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
OSI network protocol specOSI network protocol spec1.2 Asynchronous Serial Transmission (cont)The sender does not know when the receiver has “looked” at the value of the bit. The sender only knows when the clock says to begin transmitting the next bit of the word.When the entire data word has been sent, the transmitter may add a Parity Bit that the transmitter generates. The Parity Bit may be used by the receiver to perform simple error checking. Then at least one Stop Bit is sent by the transmitter.When the receiver has received all of the bits in the data word, it may check for the Parity Bits (both sender and receiver must agree on whether a Parity Bit is to be used), and then the receiver looks for a Stop Bit. If the Stop Bit does not appear when it is supposed to, the UART considers the entire word to be garbled and will report a Framing Error to the host processor when the data word is read. The usual cause of a Framing Error is that the sender and receiver clocks were not running at the same speed, or that the signal was interrupted.
Regardless of whether the data was received correctly or not, the UART automatically discards the Start, Parity and Stop bits. If the sender and receiver are configured identically, these bits are not passed to the host.If another word is ready for transmission, the Start Bit for the new word can be sent as soon as the Stop Bit for the previous word has been sent.Because asynchronous data is “self synchronizing”, if there is no data to transmit, the transmission line can be idle.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
MAP (Manufacturing Automation Protocol) – not used much today
GEM (Generic Equipment Model) - generalized model that describes a recommended implementation of the SEMI Equipment Communications Standard II [SEMATECH]. It is used in communications and control of semiconductor manufacturing equipment, and provides a reference model for any type of equipment. It contains functionality that can apply to most equipment, but does not address unique requirements of specific equipment. [SEMI E30-94]
MAP (Manufacturing Automation Protocol) – not used much today
GEM (Generic Equipment Model) - generalized model that describes a recommended implementation of the SEMI Equipment Communications Standard II [SEMATECH]. It is used in communications and control of semiconductor manufacturing equipment, and provides a reference model for any type of equipment. It contains functionality that can apply to most equipment, but does not address unique requirements of specific equipment. [SEMI E30-94]
Factory floor communication standardsFactory floor communication standards

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Network AssessmentNetwork Assessment1. Explain the GEM protocol.
2. Who are some GEM vendors (Cimetrix is one) and who are some GEM users (Motorola is one)?
3. Who is Sematech (developed GEM spec)?
4. Explain the Serial (RS 232, 485, etc.) protocol?
5. What is difference between RS 232, RS 422, RS 485, etc.?
6. Show some examples of message/packet formats using ASCII. What does ASCII stand for?
7. What are typical network communications limitations? What is IEEE 1394? What is Ethernet? Can Ethernet be used as a real-time network?
8. What are possible communication speeds in the different modes/protocols?
9. What type of communications networks do modern machine tools and robots use?
10. What do modern factory networks look like?
1. Explain the GEM protocol.
2. Who are some GEM vendors (Cimetrix is one) and who are some GEM users (Motorola is one)?
3. Who is Sematech (developed GEM spec)?
4. Explain the Serial (RS 232, 485, etc.) protocol?
5. What is difference between RS 232, RS 422, RS 485, etc.?
6. Show some examples of message/packet formats using ASCII. What does ASCII stand for?
7. What are typical network communications limitations? What is IEEE 1394? What is Ethernet? Can Ethernet be used as a real-time network?
8. What are possible communication speeds in the different modes/protocols?
9. What type of communications networks do modern machine tools and robots use?
10. What do modern factory networks look like?

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Programmable Logic Control (PLC) Programmable Logic Control (PLC)
Definition - dedicated computer for rapid processing of simple logic instructions in a defined time.
Purpose - send and read signals that can be used to control and monitor devices.
Process - one of scanning all the devices (sensors, timers, etc.) in a cyclical time period.
Definition - dedicated computer for rapid processing of simple logic instructions in a defined time.
Purpose - send and read signals that can be used to control and monitor devices.
Process - one of scanning all the devices (sensors, timers, etc.) in a cyclical time period.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
PLC Control ApproachesPLC Control Approaches
Logic control method ‑ This closed-loop method uses conditions and events to signal completion of a given step, and then triggers the execution of some other event. This is an asynchronous method of process control, because it does not always proceed in a constant time period.
Sequencing method - This open-loop method uses timers to trigger the completion of one step and the beginning of the next. This is a synchronous control method.
Logic control method ‑ This closed-loop method uses conditions and events to signal completion of a given step, and then triggers the execution of some other event. This is an asynchronous method of process control, because it does not always proceed in a constant time period.
Sequencing method - This open-loop method uses timers to trigger the completion of one step and the beginning of the next. This is a synchronous control method.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Logic Control Elements Logic Control Elements
PLC's are typically programmed using Boolean logic, shown figuratively by logical AND, OR, and NOT gates.
PLC's are typically programmed using Boolean logic, shown figuratively by logical AND, OR, and NOT gates.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Logic Control Elements Logic Control Elements
AND, OR, and NOT gates are then used to define two more logical elements - the NAND and NOR gates - also shown with their truth tables.
AND, OR, and NOT gates are then used to define two more logical elements - the NAND and NOR gates - also shown with their truth tables.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Boolean algebra Boolean algebra
+ = “or”
= “and”

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Ladder logic diagramsLadder logic diagrams
Ladder logic diagrams display the various logic elements (shown above) along horizontal lines connected to two vertical ladders.
Ladder logic diagrams display the various logic elements (shown above) along horizontal lines connected to two vertical ladders.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Ladder logic exampleLadder logic exampleSuppose we want to use a programmable logic controller to handle the control circuitry to require an assembly line to be started in low speed before permitting operation in high speed. The following inputs and outputs are defined:
11 = momentary spring push button to signal to start the line in low speed
00 = momentary spring push button to signal to switch the line to high speed
01 = momentary spring push button to stop the line
20 = low speed load
21 = high speed load
Suppose we want to use a programmable logic controller to handle the control circuitry to require an assembly line to be started in low speed before permitting operation in high speed. The following inputs and outputs are defined:
11 = momentary spring push button to signal to start the line in low speed
00 = momentary spring push button to signal to switch the line to high speed
01 = momentary spring push button to stop the line
20 = low speed load
21 = high speed load
Solution:
If low speed button pushed and If low speed button pushed and button to stop line not pushed and button to stop line not pushed and it is not running in high speed, it is not running in high speed, then start in low speed.then start in low speed.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Ladder logic exampleLadder logic example
Process will mix ingredients, first adding ingredient A until level reaches sensor 2, then adding ingredient B until level reaches sensor 1. The mix is then stirred for a period of time, and tank is emptied. Investigate the control logic required.
Process will mix ingredients, first adding ingredient A until level reaches sensor 2, then adding ingredient B until level reaches sensor 1. The mix is then stirred for a period of time, and tank is emptied. Investigate the control logic required.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Ladder logic exampleLadder logic example
How would you write the ladder logic for this problem?
How would you write the ladder logic for this problem?

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Ladder logic exampleLadder logic exampleX1, X2 = sensors
S1, S2, S3 = solenoids (relays)
M = motor (relay)
T1 = tank stir period
T2 = drain period
TMRT1
S3
S1
TMRT2
S3
T1
X2 S3
S2
X1 X2
M
M
X1

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Ladder logic exampleLadder logic example
AddressAddress
Low = Low = 00000000
High = High = 00010001
Motor = Motor = 05000500
Relay = Relay = 10001000

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Fieldbus I/OFieldbus I/O
Fieldbus is a generic term that describes a new digital communications network that is being used in industry to replace the existing 4-20 mA analog signal standard.
The network is a digital, bi-directional, multi-drop, serial-bus communication network used to link isolated field devices, such as controllers, transducers, actuators and sensors.
Bi-directional means it is a duplex port; the data can be transmitted in two directions at the same time.
Multi-drop is also referred to as multi-access and it can be interpreted as a single bus with many nodes connected to it.
Serial-bus means the data is transmitted serially according to RS232 or RS485 protocol. Profibus uses RS485 protocol.
Fieldbus is a generic term that describes a new digital communications network that is being used in industry to replace the existing 4-20 mA analog signal standard.
The network is a digital, bi-directional, multi-drop, serial-bus communication network used to link isolated field devices, such as controllers, transducers, actuators and sensors.
Bi-directional means it is a duplex port; the data can be transmitted in two directions at the same time.
Multi-drop is also referred to as multi-access and it can be interpreted as a single bus with many nodes connected to it.
Serial-bus means the data is transmitted serially according to RS232 or RS485 protocol. Profibus uses RS485 protocol.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Fieldbus I/OFieldbus I/O
Most fieldbus technologies are based on the Controller Area Network (CAN) protocol developed in the late 1980's for serial communications between automobile modules with high resistance to noise and an ability to detect errors.
Most fieldbus technologies are based on the Controller Area Network (CAN) protocol developed in the late 1980's for serial communications between automobile modules with high resistance to noise and an ability to detect errors.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
CAN - Controller Area Network
ISO 11898 standardCAN - Controller Area Network
ISO 11898 standard
• Uses OSI two lowest layers - data link and physical layers.
• Chips embedded in the physical modules/devices, and interfaced
to physical network.
• Transmission rate can vary from 250 KB up to 1 MB (per second
understood).
• Physical layer uses differential transmission on a twisted pair
wire.
• Non-destructive bit-wise arbitration controls access to the bus.
• Uses OSI two lowest layers - data link and physical layers.
• Chips embedded in the physical modules/devices, and interfaced
to physical network.
• Transmission rate can vary from 250 KB up to 1 MB (per second
understood).
• Physical layer uses differential transmission on a twisted pair
wire.
• Non-destructive bit-wise arbitration controls access to the bus.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
• Messages small (at most eight data bytes) and protected by
checksum.
• No explicit address in the messages, instead, each message
carries a numeric value which controls its priority on the bus, and
may also serve as an identification of the contents of the message.
• Elaborate error handling scheme results in retransmitted
messages when they are not properly received.
• Means for isolating faults and removing faulty nodes from bus.
• Messages small (at most eight data bytes) and protected by
checksum.
• No explicit address in the messages, instead, each message
carries a numeric value which controls its priority on the bus, and
may also serve as an identification of the contents of the message.
• Elaborate error handling scheme results in retransmitted
messages when they are not properly received.
• Means for isolating faults and removing faulty nodes from bus.
CAN - Controller Area Network
ISO 11898 standardCAN - Controller Area Network
ISO 11898 standard

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
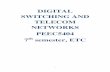
Profibus FieldbusProfibus Fieldbus
Profibus is a vendor-independent, open fieldbus standard for a wide range of applications in manufacturing, and process automation. Devices configured by different manufacturers can communicate without special interface adjustments. Profibus can be used for both high-speed, time-critical data transmission and extensive complex communication tasks.
Profibus family consists of three compatible versions:
Profibus-DP
Profibus-PA
Profibus-FMS
Profibus is a vendor-independent, open fieldbus standard for a wide range of applications in manufacturing, and process automation. Devices configured by different manufacturers can communicate without special interface adjustments. Profibus can be used for both high-speed, time-critical data transmission and extensive complex communication tasks.
Profibus family consists of three compatible versions:
Profibus-DP
Profibus-PA
Profibus-FMS

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Profibus FieldbusProfibus Fieldbus
Profibus-DP:Designed for communication between automation control systems and distributed I/O at the device level (only card used in EAAL).
Profibus-PA:Designed for process automation….permits sensors and actuators to be connected on one common bus.
Profibus-FMS:For communication tasks at the cell level and can be used for FMS services.
Profibus-DP:Designed for communication between automation control systems and distributed I/O at the device level (only card used in EAAL).
Profibus-PA:Designed for process automation….permits sensors and actuators to be connected on one common bus.
Profibus-FMS:For communication tasks at the cell level and can be used for FMS services.
FactoryLevel
CellLevel
FieldLevel
Bus CycleTime
< 1000 ms
Bus CycleTime
< 100 ms
Bus CycleTime
< 10 ms
MMS, TCP/IP Backbone
Profibus-FMS
Profibus-DP Profibus-PA
I/ODrive ValvesField
DeviceTrans-mitter
FieldDevice
AreaController

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Profibus fieldbus in EAALProfibus fieldbus in EAAL
The Profibus API set is a set of C/C++ functions provided with the Synergetic
DP card software that can be embedded into a user-customizable software
interface provided with CIMServer. Once compiled and linked to make a
customized CIMServer version, CODE client processes can directly
communicate with the
Profibus-DP card for I/O
data exchange. .
The Profibus API set is a set of C/C++ functions provided with the Synergetic
DP card software that can be embedded into a user-customizable software
interface provided with CIMServer. Once compiled and linked to make a
customized CIMServer version, CODE client processes can directly
communicate with the
Profibus-DP card for I/O
data exchange. .
SignalTable
CIMServer
Device Driver Interface
User Defined FunctionsProfibus API SetCODE Functions
DPM Data Exchange
Profibus-DP CardR
S485
ClientProcess1
CIMTools
CxGetSignal()CxSetSignal() …
Signal File(read upon CIMServer startup)
Initialization Blocks
Configuration Blocks
I/O Modules
CODE (Cimetrix Open Development Environment)Profibus-DP I/O
ClientProcess2

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
Wago I/O modulesWago I/O modules
The digital input module receives signals from digital field devices (sensors, etc). The physical connection of the WAGO module is shown. The middle two wires are for the sensor power supply. The other two wires are signal input/output and signal ground.
The digital input module receives signals from digital field devices (sensors, etc). The physical connection of the WAGO module is shown. The middle two wires are for the sensor power supply. The other two wires are signal input/output and signal ground.

ME 486 - ME 486 - AutomationAutomationME 486 - ME 486 - AutomationAutomation
I/O AssessmentI/O Assessment
1. Who are the primary PLC vendors?
2. What are typical costs per I/O?
3. How fast can I/O be processed (in milli‑seconds)?
4. What are some of the newer programming interfaces?
5. How are PLC's integrated into the control of a mechanism such as a machine tool?
6. How is analog I/O handled?
7. How does the fieldbus I/O technologies compare to the conventional PLC technologies? In costs, differences, protocol, etc.
8. Who are primary vendors of fieldbus technologies?
1. Who are the primary PLC vendors?
2. What are typical costs per I/O?
3. How fast can I/O be processed (in milli‑seconds)?
4. What are some of the newer programming interfaces?
5. How are PLC's integrated into the control of a mechanism such as a machine tool?
6. How is analog I/O handled?
7. How does the fieldbus I/O technologies compare to the conventional PLC technologies? In costs, differences, protocol, etc.
8. Who are primary vendors of fieldbus technologies?
Related Documents