34 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 53, NO. 1, JANUARY 2005 Maximum Likelihood Direction-of-Arrival Estimation in Unknown Noise Fields Using Sparse Sensor Arrays Sergiy A. Vorobyov, Member, IEEE, Alex B. Gershman, Senior Member, IEEE, and Kon Max Wong, Fellow, IEEE Abstract—We address the problem of maximum likelihood (ML) direction-of-arrival (DOA) estimation in unknown spatially correlated noise fields using sparse sensor arrays composed of multiple widely separated subarrays. In such arrays, intersub- array spacings are substantially larger than the signal wavelength, and therefore, sensor noises can be assumed to be uncorrelated between different subarrays. This leads to a block-diagonal struc- ture of the noise covariance matrix which enables a substantial reduction of the number of nuisance noise parameters and ensures the identifiability of the underlying DOA estimation problem. A new deterministic ML DOA estimator is derived for this class of sparse sensor arrays. The proposed approach concentrates the ML estimation problem with respect to all nuisance parameters. In contrast to the analytic concentration used in conventional ML techniques, the implementation of the proposed estimator is based on an iterative procedure, which includes a stepwise concentra- tion of the log-likelihood (LL) function. The proposed algorithm is shown to have a straightforward extension to the case of uncal- ibrated arrays with unknown sensor gains and phases. It is free of any further structural constraints or parametric model restric- tions that are usually imposed on the noise covariance matrix and received signals in most existing ML-based approaches to DOA es- timation in spatially correlated noise. Index Terms—Array processing, maximum likelihood estima- tion, spatially correlated noise fields. I. INTRODUCTION M AXIMUM LIKELIHOOD (ML) direction-of-arrival (DOA) estimation techniques play an important role in sensor array processing because they provide an excellent tradeoff between the asymptotic and threshold DOA estima- tion performances [1]–[5]. One of the key assumptions used in formulation of both the deterministic and stochastic ML estimators [5] is the so-called spatially homogeneous white Manuscript received May 3, 2003; revised January 30, 2004. This work was supported in part by the Wolfgang Paul Award Program of the Alexander von Humboldt Foundation (Germany) and German Ministry of Education and Re- search; the Premiers Research Excellence Award Program of the Ministry of Energy, Science, and Technology (MEST) of Ontario; the Natural Sciences and Engineering Research Council (NSERC) of Canada; and Communication and Information Technology Ontario (CITO), Canada. The associate editor coordi- nating the review of this paper and approving it for publication was Dr. Paul D. Fiore. S. A. Vorobyov is with the Department of Communication Systems, Univer- sity of Duisburg-Essen, 47057 Duisburg, Germany. A. B. Gershman is with the Department of Communication Systems, Univer- sity of Duisburg-Essen, 47057 Duisburg, Germany, on leave from the Depart- ment of Electrical and Computer Engineering, McMaster University, Hamilton, ON, L8S 4K1, Canada. K. M. Wong is with the Department of Electrical and Computer Engineering, McMaster University, Hamilton, ON, L8S 4K1, Canada. Digital Object Identifier 10.1109/TSP.2004.838966 noise 1 assumption. Accordingly, sensor noises are modeled as spatially and temporally uncorrelated zero-mean Gaussian processes such that the noise covariance matrix is , where is the unknown noise variance and is the identity matrix. This simple assumption makes it possible to concentrate the resulting log-likelihood (LL) function with respect to all nui- sance parameters (i.e., the noise variance and signal non-DOA parameters) and to reduce the dimension of the parameter space and the associated computational burden [2], [4], [6]. The homogeneous white noise assumption may be violated in numerous applications (e.g., sonar) where the noise envi- ronment remains unknown [7]–[17]. In this case, the sensor noise should be considered as an unknown spatially correlated process. Several colored noise modeling-based ML DOA es- timation techniques have been previously proposed [8]–[11]. However, these techniques involve a large number of noise nuisance parameters, and as a rule, it is not possible to con- centrate the corresponding LL function with respect to all of them. Furthermore, the aforementioned approaches are typi- cally restricted by some specific parameterization of the noise covariance matrix or require additional information about the signals. Such parameterizations impose some particular struc- ture on the noise covariance matrix in order to reduce the number of the noise nuisance parameters. Otherwise, the iden- tifiability conditions may be violated [16]. For example, in [8] and [9], the noise is modeled as an auto-regressive (AR) process, while in [10], the authors assume that the noise can be parameterized using a small number of Fourier coefficients. In [18], the noise is assumed to be spatially white but to have nonidentical variances in array sensors. The method of [13] uses the temporal correlation of the sources and is based on the assumption that the source correlation interval is substantially larger than that of the sensor noise. Another technique of the same authors requires partial knowledge of the signals [14]. Clearly, such structural noise and signal assumptions may se- verely restrict the applications of the aforementioned techniques because they can cause a substantial performance degradation in the case when the actual structure of the noise covariance matrix does not match the presumed parametric model [18] or when the assumptions about the signal sources are violated. An- other ML-based approach to the problem of DOA estimation in uniform linear arrays (ULAs) has been recently proposed in [17]. The latter method does not require any structural assump- tions on the received signals or the noise covariance matrix, but 1 Such a noise is often referred to as a spatially uniform white noise. 1053-587X/$20.00 © 2005 IEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
34 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 53, NO. 1, JANUARY 2005
Maximum Likelihood Direction-of-ArrivalEstimation in Unknown Noise Fields Using
Sparse Sensor ArraysSergiy A. Vorobyov, Member, IEEE, Alex B. Gershman, Senior Member, IEEE, and Kon Max Wong, Fellow, IEEE
Abstract—We address the problem of maximum likelihood(ML) direction-of-arrival (DOA) estimation in unknown spatiallycorrelated noise fields using sparse sensor arrays composed ofmultiple widely separated subarrays. In such arrays, intersub-array spacings are substantially larger than the signal wavelength,and therefore, sensor noises can be assumed to be uncorrelatedbetween different subarrays. This leads to a block-diagonal struc-ture of the noise covariance matrix which enables a substantialreduction of the number of nuisance noise parameters and ensuresthe identifiability of the underlying DOA estimation problem.
A new deterministic ML DOA estimator is derived for this classof sparse sensor arrays. The proposed approach concentrates theML estimation problem with respect to all nuisance parameters.In contrast to the analytic concentration used in conventional MLtechniques, the implementation of the proposed estimator is basedon an iterative procedure, which includes a stepwise concentra-tion of the log-likelihood (LL) function. The proposed algorithmis shown to have a straightforward extension to the case of uncal-ibrated arrays with unknown sensor gains and phases. It is freeof any further structural constraints or parametric model restric-tions that are usually imposed on the noise covariance matrix andreceived signals in most existing ML-based approaches to DOA es-timation in spatially correlated noise.
Index Terms—Array processing, maximum likelihood estima-tion, spatially correlated noise fields.
I. INTRODUCTION
MAXIMUM LIKELIHOOD (ML) direction-of-arrival(DOA) estimation techniques play an important role
in sensor array processing because they provide an excellenttradeoff between the asymptotic and threshold DOA estima-tion performances [1]–[5]. One of the key assumptions usedin formulation of both the deterministic and stochastic MLestimators [5] is the so-called spatially homogeneous white
Manuscript received May 3, 2003; revised January 30, 2004. This work wassupported in part by the Wolfgang Paul Award Program of the Alexander vonHumboldt Foundation (Germany) and German Ministry of Education and Re-search; the Premiers Research Excellence Award Program of the Ministry ofEnergy, Science, and Technology (MEST) of Ontario; the Natural Sciences andEngineering Research Council (NSERC) of Canada; and Communication andInformation Technology Ontario (CITO), Canada. The associate editor coordi-nating the review of this paper and approving it for publication was Dr. Paul D.Fiore.
S. A. Vorobyov is with the Department of Communication Systems, Univer-sity of Duisburg-Essen, 47057 Duisburg, Germany.
A. B. Gershman is with the Department of Communication Systems, Univer-sity of Duisburg-Essen, 47057 Duisburg, Germany, on leave from the Depart-ment of Electrical and Computer Engineering, McMaster University, Hamilton,ON, L8S 4K1, Canada.
K. M. Wong is with the Department of Electrical and Computer Engineering,McMaster University, Hamilton, ON, L8S 4K1, Canada.
Digital Object Identifier 10.1109/TSP.2004.838966
noise1 assumption. Accordingly, sensor noises are modeledas spatially and temporally uncorrelated zero-mean Gaussianprocesses such that the noise covariance matrix is , where
is the unknown noise variance and is the identity matrix.This simple assumption makes it possible to concentrate theresulting log-likelihood (LL) function with respect to all nui-sance parameters (i.e., the noise variance and signal non-DOAparameters) and to reduce the dimension of the parameter spaceand the associated computational burden [2], [4], [6].
The homogeneous white noise assumption may be violatedin numerous applications (e.g., sonar) where the noise envi-ronment remains unknown [7]–[17]. In this case, the sensornoise should be considered as an unknown spatially correlatedprocess. Several colored noise modeling-based ML DOA es-timation techniques have been previously proposed [8]–[11].However, these techniques involve a large number of noisenuisance parameters, and as a rule, it is not possible to con-centrate the corresponding LL function with respect to all ofthem. Furthermore, the aforementioned approaches are typi-cally restricted by some specific parameterization of the noisecovariance matrix or require additional information about thesignals. Such parameterizations impose some particular struc-ture on the noise covariance matrix in order to reduce thenumber of the noise nuisance parameters. Otherwise, the iden-tifiability conditions may be violated [16]. For example, in[8] and [9], the noise is modeled as an auto-regressive (AR)process, while in [10], the authors assume that the noise canbe parameterized using a small number of Fourier coefficients.In [18], the noise is assumed to be spatially white but to havenonidentical variances in array sensors. The method of [13]uses the temporal correlation of the sources and is based on theassumption that the source correlation interval is substantiallylarger than that of the sensor noise. Another technique of thesame authors requires partial knowledge of the signals [14].
Clearly, such structural noise and signal assumptions may se-verely restrict the applications of the aforementioned techniquesbecause they can cause a substantial performance degradationin the case when the actual structure of the noise covariancematrix does not match the presumed parametric model [18] orwhen the assumptions about the signal sources are violated. An-other ML-based approach to the problem of DOA estimationin uniform linear arrays (ULAs) has been recently proposed in[17]. The latter method does not require any structural assump-tions on the received signals or the noise covariance matrix, but
1Such a noise is often referred to as a spatially uniform white noise.
1053-587X/$20.00 © 2005 IEEE

VOROBYOV et al.: MAXIMUM LIKELIHOOD DIRECTION-OF-ARRIVAL ESTIMATION 35
it uses an inconsistent ad hoc estimate of this matrix. As a re-sult, the practical performance of this approach can be substan-tially worse than that dictated by the corresponding Cramér-Raobound (CRB) [16]. Moreover, this method does not have anyextension to the case of nonuniform (sparse) sensor arrays.
To avoid these shortcomings of the aforementioned ML tech-niques in the colored noise case, an alternative way of reducingthe number of noise nuisance parameters can be used. Instead ofassuming that the noise covariance matrix has some particularstructure, the sparsity of the resulting array covariance matrixcan be enforced by specifying the array geometry in a certainway. This idea was used in [15], [19], and [20] in applicationto sensor arrays composed of two well separated subarrays. Inthis paper, we extend this idea to a more general class of sensorarrays composed of multiple arbitrary widely separated subar-rays. Such arrays have recently attracted a significant attentionin the literature because using them extends the array aperturewithout a corresponding increase in hardware and software costs[21]–[27]. In such arrays, intersubarray spacings are substan-tially larger than the signal wavelength, and therefore, sensornoises can be assumed to be uncorrelated between different sub-arrays. Hence, the noise covariance matrix of the whole array isblock-diagonal. Using the block-diagonal structure of this ma-trix, the number of nuisance noise parameters can be substan-tially reduced and, therefore, identifiability can be guaranteed[16].
It is worth mentioning that this approach can be applied to anysparse array. A proper specification of the subarray structure ofsuch an array can be easily established using the preliminaryknowledge of the minimal required interelement spacing thatguarantees statistical independence of noise in a pair of adjacentsensors.
The remainder of this paper is organized as follows. The arraysignal model is introduced in Section II. A new deterministic MLDOA estimator is derived in Section III. The proposed approachconcentrates the ML estimation problem with respect to allnuisance parameters. In contrast to the analytic concentrationused in the conventional ML techniques, the implementation ofthe proposed estimator is based on an iterative procedure thatincludes a stepwise concentration of the LL function with respectto the signal and noise nuisance parameters. The extension of ourtechnique to the case of uncalibrated arrays with unknown sensorgains and phases is given in Section IV. In Section V, computersimulation results are presented, demonstrating the validity ofour technique and performance improvements achieved withrespect to the popular colored noise modeling-based ML methodof [10] and the method of [17], which do not exploit the arraysparsity. Both in the calibrated and uncalibrated array cases,the results are compared with the corresponding CRBs (notethat the CRB for the latter case is derived in Appendix B).Conclusions are drawn in Section VI.
II. ARRAY SIGNAL MODEL
Let an array of sensors receive signals from nar-rowband far-field sources with unknown DOAs .The array snapshot vectors can be modeled as [1]–[5]
(1)
where is the vector of signal DOAs
(2)
is the source direction matrix, is the steeringvector, is the vectorof the source waveforms, isthe vector of sensor noise, denotes transpose, and
is the number of statistically independent snapshots. We canrewrite (1) in a more compact notation as
(3)
whereare the array data matrix, the
source waveform matrix, and the sensor noise matrix,respectively.
In this paper, we consider the case of sparse arrays com-posed of arbitrary subarrays whose intersubarray displace-ments are substantially larger than the signal wavelength. Asa result, sensor noises can be assumed to be statistically inde-pendent between different subarrays. This leads to the followingmodel of the noise covariance matrix:
. . .
bdiag (4)
where is the noise covariance matrix of the thsubarray, is the number of sensors in the th subarray,
bdiag denotes the block-diagonal matrixoperator, denotes Hermitian transpose, and is thestatistical expectation.
The signal waveforms are usually assumed to be either de-terministic unknown processes [4] or random temporally whitezero-mean Gaussian processes [5]. For the rest of this paper, weassume that the observations satisfy the following deterministicmodel
(5)
where denotes the complex Gaussian distribution.Let us parameterize the noise covariance matrix as
(6)
where
(7)
is the real vector whosesubvector is made from the elements , andRe Im , where , and
.

36 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 53, NO. 1, JANUARY 2005
III. MAXIMUM LIKELIHOOD ESTIMATION
In this section, we will derive the deterministic ML estimatorof the DOA vector . In the deterministic case, the vector ofunknown parameters can be written as
(8)
The likelihood function is given by [4]
(9)
where is assumed to be invertible. After omitting constantterms, the LL function can be written as
(10)
where
(11)
(12)
Let us introduce the matrix
(13)
where is the vector corresponding to the th column.Hence, the second term in (10) can be written as
(14)
Using (14) and standard matrix differentiation rules, we obtain
(15)
where , and . In the latter expression,is the vector that contains one in the th
position and zeros elsewhere, , and
(16)
Furthermore, we have
(17)
Using (10), (15), and (17), we obtain
(18)
where is assumed to be invertible. Equating (18) to zero forall and and fixing all otherparameters, we can find the ML estimates of all the entries ofthe block-diagonal noise covariance matrix . It is obvious that(18) is always equal to zero if the matrix has allzero elements. Therefore, the ML estimate of is givenby
(19)
where , and .Hence, the ML estimate of can be written as
bdiag (20)
where the elements of the matrices are givenby (19). Note that alternatively, this estimate can be obtainedusing the results reported in [28].
Let us introduce the matrix
bdiag (21)
where is the matrix of ones. Using this notation, (20)can be rewritten as
(22)
where denotes the Schur–Hadamard matrix product.Inserting (22) into (10) and using (14), we have
det
(23)
Let us now simplify the second term of (23). In Appendix A,it is shown that
(24)
Hence, this is a constant term that can be omitted in the LLfunction. Omitting this term and the constant factor in thefirst term of the right-hand side of (23), we can simplify the LLfunction to
(25)
The ML estimate of can be obtained by fixing all otherparameters, differentiating (10) with respect to and equatingthe result to zero. This estimate has the following form [18]:
(26)
where
(27)

VOROBYOV et al.: MAXIMUM LIKELIHOOD DIRECTION-OF-ARRIVAL ESTIMATION 37
From (26) and (27), we observe that the ML estimate ofdepends on and . In turn, the ML estimate of in (22)depends on and . Therefore, using these estimates, it is notpossible to obtain any closed-form LL function that is fullyconcentrated with respect to the full set of nuisance parameters2
(see also [18]).Inserting (26) into (13), we have
(28)
where
(29)
(30)
are the orthogonal projection matrices.Using (16) and (28), we can rewrite the LL function (25) as
det
det
det
(31)
where
(32)
is the sample correlation matrix of the transformed data, while is the sample
correlation matrix of the original data .Note that the noise nuisance parameters are assumed to be es-timated (fixed), and therefore, in (31). Equation(31) will be used in the sequel to formulate our iterative MLalgorithm.
A. Specific Case of White Noise
In the specific case of spatially inhomogeneous white noisethe matrix becomes diagonal, i.e., diagand becomes the identity matrix . Then, the LL function(31) can be simplified as
tr og
tr og
tr og tr og (33)
where tr is the trace of a matrix, og is the element-wise logarithm operator [18] defined for an arbitrary ma-trix as og , and
2The set of nuisance parameters includes all non-DOA parameters suchas noise and signal waveform parameters.
. As the noise nuisance parame-ters are assumed to be estimated (fixed), the constant termtr og can be omitted, and (33) can be rewritten as
tr og (34)
The function (34) corresponds3 to that derived in [18].
B. Iterative Concentration of the LL Function
An important observation following from the form of LLfunction (31) is that this function does not enable simultaneousconcentration with respect to all nuisance parameters. Indeed,the estimate of the signal DOA vector depends on the esti-mate (22) of the noise covariance matrix , which, in turn, isdependent on the estimate of . To overcome this problem, theso-called stepwise concentration of the ML function is used inan iterative way [18]. Note that approaches using the idea ofiterative maximization of the LL function in the homogeneouswhite noise case were also exploited in [1] and [3].
The proposed ML DOA estimator can be formulated as thefollowing iterative procedure.
Step 1) Initialize as .Step 2) Find the estimate of as
(35)
Step 3) Use obtained in (35) to compute the estimate ofin (26). Refine the estimate of using (22) and
the previously obtained estimates and .Repeat Steps 2 and 3 a few times to obtain the
final estimate of .The proposed procedure can be viewed as an extension of theearlier algorithm developed in [18] for the inhomogeneouswhite noise case.
As can be seen from Step 1, the algorithm is initialized usingthe homogeneous white noise assumption. Convergence followsfrom the fact that at each step, the value of objective functionin (35) can either improve or maintain but cannot worsen. Thesame is valid for the conditional update of . Thus, monotoneconvergence to (at least) a local minimum follows directly fromthis observation. We show in the simulation that even two itera-tions are enough to obtain a solution close to CRB.
IV. EXTENSION TO THE CASE OF UNCALIBRATED ARRAY WITH
UNKNOWN SENSOR GAINS AND PHASES
In this section, we extend our algorithm to the case when thearray sensors have unknown gains and phases. In this case, thearray model can be rewritten as [29]
(36)
where is a diagonal matrix containing the unknown com-plex-valued sensor responses, i.e., diag ,and .
3Note that because of a typographic error in the last rows of (22) in [18], theresulting LL function is written incorrectly there (one of the projection matriceswas wrongly omitted).

38 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 53, NO. 1, JANUARY 2005
Then, the LL function can be rewritten as
(37)
where
Re Im (38)
is the vector of unknown real parameters, and.
It can be readily verified that the result of (22) remains valid inthe uncalibrated array case if we replace by inthis equation. Similarly, the results of (26) and (31) remain validif we replace by . Note that now the LL function (31)also depends on , i.e., .
In order to find the ML estimate of the vector , we rewritethe LL function (37) as
tr
(39)
Differentiating (39) with respect to and set-ting the result to zero, we obtain the following system of linearequations:
(40)
where and stands for the complex conjugate.By fixing , and , and solving the system (40) for , wecan find the ML estimate for the latter parameter.
Similar to the calibrated array case considered in the previoussection, the ML DOA estimator can be formulated as an iterativeprocedure. Note that in Step 1, in addition to the initializationof , we also should initialize as . Moreover, anadditional step after Step 3 is required. In this step, the matrix
is estimated by solving the system of linear equations in(40) with fixed , and that have been estimated in theprevious steps.
In Appendix B, we derive the deterministic CRB for the un-calibrated array case using the model (36) parameterized bymeans of the vector (38).
V. SIMULATIONS
In this section, we numerically compare the performance ofthe proposed ML DOA estimator with that of the ML colorednoise modeling-based technique by Friedlander and Weiss [10]and the approximate technique by Agrawal and Prasad [17], aswell as with the deterministic and stochastic CRBs in the col-ored noise case (see [9] and [16]). For the proposed methodand the method of [10], we assume a sparse linear array of
sensors with the aperture of , where is the wave-length. This array is assumed to consist of three uniform linear
Fig. 1. Sparse nonuniform array and equivalent ULA used in simulations.(a) Sparse array. (b) ULA.
subarrays of four, three, and two sensors, respectively. Eachof these subarrays has the interelement spacing. The firstand second subarrays are spaced apart from each other,while the second and third subarrays are spaced apart fromeach other. The configuration of the array is shown in Fig. 1(a).Throughout all examples, we assume that the noises betweenall three subarrays are uncorrelated and that the noise covari-ance matrix has the following block-diagonal form
bdiag (41)
where , and are the 4 4, 3 3, and 2 2 matrices,respectively, and
(42)
The values , andare assumed. Note that the covariance model in (42)
has found numerous applications in sonar and wireless commu-nications (see [16], [30]–[33], and references therein).
The method of [17] is based on the assumption that the arrayis a ULA. Therefore, to enable comparison with this method,we test it using an “equivalent” ULA with sensors and
spacing, which has the same aperture as the nonuniformarray used. The configuration of this equivalent ULA is shownin Fig. 1(b). Note that using such an equivalent array instead ofthe nonuniform array of Fig. 1(a), we favor the method of [17]with respect to the other methods tested because the equivalentULA of Fig. 1(b) has more sensors than the nonuniform array ofFig. 1(a). The noise covariance matrix for the equivalent ULAis assumed to have the following form:
bdiag (43)
Throughout all simulation examples, we assume two narrow-band far-field signal sources of equal power impinging on thearray from and relative to the broadside. Thecomplex-valued signal waveforms are modeled as zero-meantemporally white Gaussian processes. The root-mean-square er-rors (RMSEs) of DOA estimation are displayed in Figs. 2–6, andeach point is obtained using 100 independent simulation runs.A genetic algorithm is used to optimize the ML-based criteriain all the techniques tested. The parameters of the genetic algo-rithm (e.g., see [34]) were optimized to ensure its convergence tothe global maximum. Two iterations of our ML algorithm givenin Section III-B are used to obtain the final DOA estimates. Forthe Friedlander–Weiss algorithm, six real-valued nuisance noiseparameters are employed to model the noise field. Therefore,the dimension of the parameter space (and, correspondingly, the

VOROBYOV et al.: MAXIMUM LIKELIHOOD DIRECTION-OF-ARRIVAL ESTIMATION 39
Fig. 2. DOA estimation RMSEs and CRBs versus the number of snapshots.Uncorrelated sources.
Fig. 3. DOA estimation RMSEs and CRBs versus the SNR. Uncorrelatedsources.
computational burden) of the latter algorithm is much higherthan that of our method.
In the first example, we assume uncorrelated sources with theSNR dB, where, similar to [12] and [18]
SNR (44)
with being the signal power. Fig. 2 shows the RMSEs ofthe DOA estimates for the methods tested versus the number ofsnapshots.
In the second example, we assume uncorrelated sources againand . Fig. 3 displays the DOA estimation RMSEs ofthe same methods versus the SNR.
In the third example, mutually correlated sources are assumedwith the correlation coefficient equal to 0.9. In this example, weassume that SNR dB, and the results are displayed in Fig. 4versus the number of snapshots.
Fig. 4. DOA estimation RMSEs and CRBs versus the number of snapshots.Correlated sources.
Fig. 5. DOA estimation RMSEs and CRBs versus the SNR. Correlatedsources.
In our fourth example, we assume correlated sources again,and is taken. The performances of the methods testedare shown in Fig. 5 versus the SNR.
In the fifth example, the array gains and phases are as-sumed to be unknown, i.e., the model (36) is applied, where
diag . The unknown non-negativegains are independently drawn in each simulationrun from a uniform random generator with the standard devi-ation equal to one, while the unknown phases areindependently and uniformly drawn from the interval .In this example, we assume that SNR dB, and the resultsare displayed in Fig. 6 versus the number of snapshots.
From Figs. 2–6, we observe that the proposed method consis-tently outperforms the Agrawal–Prasad and Friedlander–Weisstechniques and that two iterations of our algorithm are suffi-cient to converge in performance to the corresponding CRBs.These improvements can be explained by the fact that our tech-nique explicitly uses the block-diagonal structure of the noise
40 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 53, NO. 1, JANUARY 2005
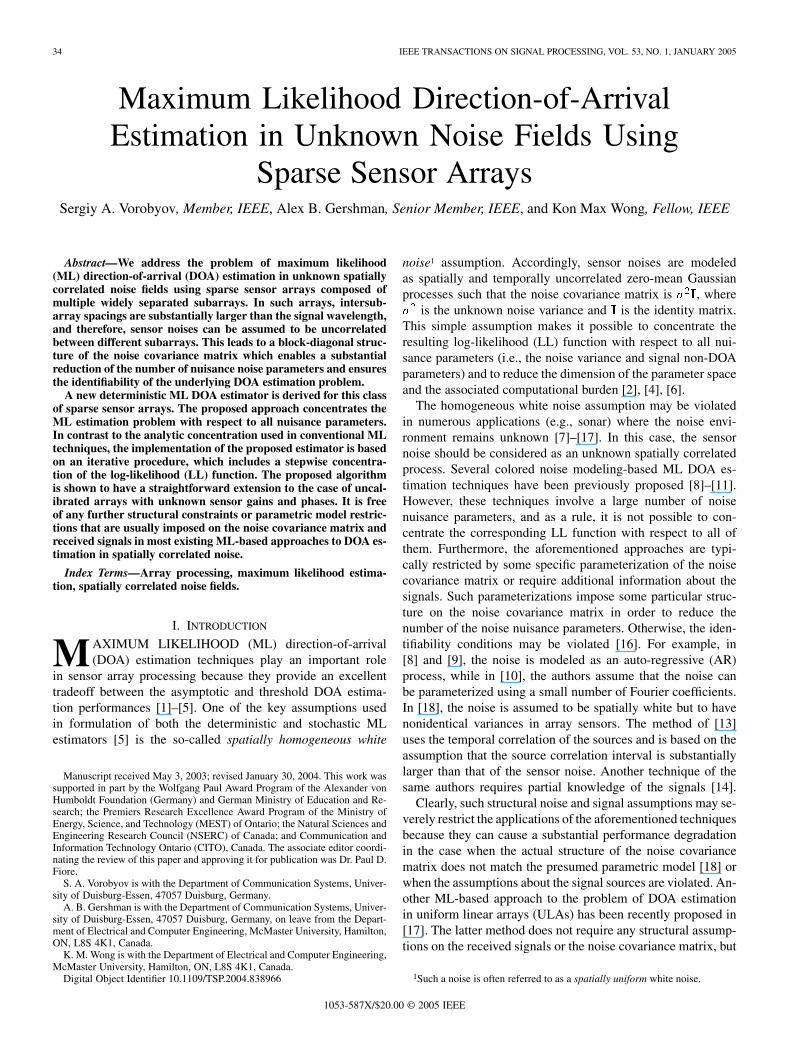
Fig. 6. DOA estimation RMSEs and CRBs versus the number of snapshots.Unknown array gains and phases.
covariance matrix, whereas the Agrawal–Prasad and Fried-lander–Weiss methods do not exploit this structure. In par-ticular, from Figs. 3 and 5 it can be seen that the proposedmethod has approximately 2.5 dB of improvement with re-spect to the Friedlander–Weiss algorithm. The Agrawal–Prasadmethod performs much worse than the other two methods inall examples. In the last example, the performance of the Fried-lander–Weiss method becomes very poor because it does notinclude unknown gains and phases in the model parameters.The proposed algorithm with estimation of unknown gainsand phases performs reasonably close to the CRB in the lattercase.
VI. CONCLUSION
We have addressed the problem of ML DOA estimation inunknown spatially correlated noise fields using sparse sensorarrays composed of multiple widely separated subarrays.
A new deterministic ML DOA estimator has been derivedfor the considered class of sparse sensor arrays. The proposedapproach concentrates the criterion of the estimation problemwith respect to all nuisance parameters. In contrast to theanalytic concentration used in the conventional ML techniques,the implementation of the proposed technique is based on aniterative procedure, which includes a stepwise concentrationof the LL function. The extension of the proposed techniqueto the case of uncalibrated arrays has also been developed andthe deterministic DOA estimation CRB has been derived forthis case. Computer simulations have shown that our algorithmrequires only a few steps to converge in performance to thecorresponding CRB. They also have demonstrated essentialperformance improvements achieved by the proposed techniquerelative to the popular ML techniques by Agrawal and Prasadand by Friedlander and Weiss, which do not take any advantageof the array sparsity.
APPENDIX APROOF OF (24)
The matrix can be rewritten as
bdiag (45)
where is the th block on the main diagonal of that isselected by the corresponding th block of . Partitioning thematrix as
......
. . ....
(46)
and using the property
bdiag (47)
we have
......
. . ....
(48)
where is the identity matrix. From (48), it follows that
tr (49)
Using (49) and the properties of the trace operator, we canrewrite the second term in the right-hand side of (23) as
tr
tr
tr
(50)
and this proves (24).
APPENDIX BDERIVATION OF THE DETERMINISTIC CRB IN THE CASE OF
UNCALIBRATED ARRAY
In the deterministic case, the elements of the Fisher informa-tion matrix (FIM) are given by [18]
tr
Re (51)

VOROBYOV et al.: MAXIMUM LIKELIHOOD DIRECTION-OF-ARRIVAL ESTIMATION 41
where the vector
(52)
are the elements of the parameter vector given by (38),stands for the Kronecker matrix product, and the size of the
identity matrix is .The derivatives of with respect to different parameters are
given by
(53)
Re(54)
Im(55)
Re
(56)
Im
(57)
where the vector has the dimensions and in(54)–(55) and (56)–(57), respectively, and
(58)
diag (59)
Using (53)–(57), the submatrices of the FIM are given by
Re
(60)
Re Re Im ImRe (61)
Re Im Im ReIm (62)
Re Re Im Im
Re
(63)
Re Im Im Re
Im
(64)
Re ReRe (65)
Im ImIm (66)
Re Re
Re
(67)
Im Im
Im
(68)
Re Re Im Im
Re Re
Im Im
Re
(69)
Re Im Im Re
Re Im
Im Re
Im
(70)
(71)
where is the Kronecker delta,and the vector has the dimension . Note that all the FIMcross-terms involving the signal and noise parameters have zerovalues.
Let us introduce the block-diagonal matrix
. . .(72)
where the matrices are defined as
Re Re Re ImIm Re Im Im
(73)
and denote
.... . .
... (74)
where the matrices are defined as
Re Re Re ImIm Re Im Im
(75)
In addition, let us introduce the matrices
(76)
(77)
(78)
(79)
42 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 53, NO. 1, JANUARY 2005
.... . .
... (80)
.... . .
... (81)
where the matrices; and
are defined as
Re Im (82)
Re Im (83)
Re Im (84)
Re Im (85)
Re Re Re ImIm Re Im Im
(86)
Re Re Re ImIm Re Im Im
(87)
Using this notation, the FIM can be written as
(88)
Using the partitioned matrix inversion formula, the CRBmatrix that corresponds to the unknown parameters can bewritten as
CRB (89)
where
(90)
(91)
REFERENCES
[1] Y. Bresler and A. Macovski, “Exact maximum likelihood parameter es-timation of superimposed exponential signals in noise,” IEEE Trans.Acoust., Speech, Signal Process., vol. ASSP-34, no. 10, pp. 1081–1089,Oct. 1986.
[2] J. F. Böhme, “Estimation of spectral parameters of correlated signals inwavefields,” Signal Process., vol. 10, pp. 329–337, 1986.
[3] I. Ziskind and M. Wax, “Maximum likelihood localization of multiplesources by alternative projection,” IEEE Trans. Acoust., Speech, SignalProcess., vol. 36, no. 10, pp. 1553–1560, Oct. 1988.
[4] P. Stoica and A. Nehorai, “MUSIC, maximum likelihood andCramér-Rao bound,” IEEE Trans. Acoust., Speech, Signal Process., vol.37, no. 5, pp. 720–741, May 1989.
[5] , “Performance study of conditional and unconditional direction-of-arrival estimation,” IEEE Trans. Acoust., Speech, Signal Process., vol.38, no. 10, pp. 1783–1795, Oct. 1990.
[6] , “On the concentrated stochastic likelihood function in array signalprocessing,” Circuits, Syst., Signal Process., vol. 14, no. 9, pp. 669–674,Sep. 1995.
[7] K. M. Wong, J. P. Reilly, Q. Wu, and S. Qiao, “Estimation of the direc-tions of arrival of signals in unknown correlated noise. Part I: The MAPapproach and its implementation,” IEEE Trans. Signal Process., vol. 40,no. 8, pp. 2007–2017, Aug. 1992.
[8] J. LeCadre, “Parametric methods for spatial signal processing in thepresence of unknown colored noise field,” IEEE Trans. Acoust., Speech,Signal Process., vol. 37, no. 7, pp. 965–983, Jul. 1989.
[9] H. Ye and R. D. DeGroat, “Maximum likelihood DOA estimation andasymptotic Cramér-Rao bounds for additive unknown colored noise,”IEEE Trans. Signal Process., vol. 43, no. 4, pp. 938–949, Apr. 1995.
[10] B. Friedlander and A. J. Weiss, “Direction finding using noise covariancemodeling,” IEEE Trans. Signal Process., vol. 43, no. 7, pp. 1557–1567,Jul. 1995.
[11] B. Göransson and B. Ottersten, “Direction estimation in partially un-known noise fields,” IEEE Trans. Signal Process., vol. 47, no. 9, pp.2375–2385, Sep. 1999.
[12] A. B. Gershman, A. L. Matveyev, and J. F. Böhme, “Maximum likeli-hood estimation of signal power in sensor array in the presence of un-known noise field,” Proc. INstg. Elect. Eng. Radar, Sonar, Navigation,vol. 142, no. 5, pp. 218–224, Oct. 1995.
[13] M. Viberg, P. Stoica, and B. Ottersten, “Array processing in correlatednoise fields based on instrumental variables and subspace fitting,” IEEETrans. Signal Process., vol. 43, no. 5, pp. 1187–1199, May 1995.
[14] , “Maximum likelihood array processing in spatially correlatednoise fields using parameterized signals,” IEEE Trans. Signal Process.,vol. 45, no. 4, pp. 996–1004, Apr. 1997.
[15] P. Stoica, M. Viberg, K. M. Wong, and Q. Wu, “Maximum-likelihoodbearing estimation with partly calibrated arrays in spatially correlatednoise field,” IEEE Trans. Signal Process., vol. 44, no. 4, pp. 888–899,Apr. 1996.
[16] A. B. Gershman, P. Stoica, M. Pesavento, and E. Larsson, “The sto-chastic Cramér-Rao bound for direction estimation in unknown noisefields,” Proc. Inst. Elect. Eng. Radar, Sonar, Navigat., vol. 149, no. 1,pp. 2–8, Feb. 2002.
[17] M. Agrawal and S. Prasad, “A modified likelihood function approachto DOA estimation in the presence of unknown spatially correlatedGaussian noise using a uniform linear array,” IEEE Trans. SignalProcess., vol. 48, no. 10, pp. 2743–2749, Oct. 2000.
[18] M. Pesavento and A. B. Gershman, “Maximum-likelihood direction ofarrival estimation in the presence of unknown nonuniform noise,” IEEETrans. Signal Process., vol. 49, no. 7, pp. 1310–1324, Jul. 2001.
[19] Q. Wu and K. M. Wong, “UN-MUSIC and UN-CLE: An applicationof generalized correlation analysis to the estimation of the directionsof arrival of signals in unknown correlated noise,” IEEE Trans. SignalProcess., vol. 42, no. 9, pp. 2331–2343, Sep. 1994.
[20] , “Estimation of DOA in unknown noise: Performance analysis ofUN-MUSIC and UN-CLE, and the optimality of CCD,” IEEE Trans.Signal Process., vol. 43, no. 2, pp. 454–468, Feb. 1995.
[21] M. D. Zoltowski and K. T. Wong, “Closed-form eigenstructure-baseddirection finding using arbitrary but identical subarrays on a sparse uni-form Cartesian array grid,” IEEE Trans. Signal Process., vol. 48, no. 8,pp. 2205–2210, Aug. 2000.
[22] A. L. Swindlehurst, P. Stoica, and M. Jansson, “Exploiting arrays withmultiple invariances using MUSIC and MODE,” IEEE Trans. SignalProcess., vol. 49, no. 11, pp. 2511–2521, Nov. 2001.
[23] M. Pesavento, A. B. Gershman, and K. M. Wong, “Direction of arrivalestimation in partly calibrated time-varying sensor arrays,” in Proc. Int.Conf. Acoust., Speech, Signal Process., Salt Lake City, UT, May 2001,pp. 3005–3008.
[24] , “Direction finding in partly calibrated sensor arrays composed ofmultiple subarrays,” IEEE Trans. Signal Process., vol. 50, no. 9, pp.2103–2115, Sep. 2002.
[25] , “On uniqueness of direction of arrival estimates using rank re-duction estimator (RARE),” in Proc. Int. Conf. Acoust., Speech, SignalProcess., Orlando, FL, May 2002.
[26] C. M. S. See and A. B. Gershman, “Direction-of-arrival estimation inpartly calibrated subarray-based sensor arrays,” IEEE Trans. SignalProcess., vol. 52, no. 2, pp. 329–338, Feb. 2004.
[27] A. B. Gershman, “Robustness issues in adaptive beamforming andhigh-resolution direction finding,” in High-Resolution and RobustSignal Processing, Y. Hua, A. B. Gershman, and Q. Cheng, Eds. NewYork: Marcel Dekker, 2003, pp. 63–110.
[28] J. P. Burg, D. G. Luenberger, and D. L. Wenger, “Estimation of struc-tured covariance matrices,” Proc. IEEE, vol. 70, no. 9, pp. 963–974, Sep.1982.

VOROBYOV et al.: MAXIMUM LIKELIHOOD DIRECTION-OF-ARRIVAL ESTIMATION 43
[29] D. Astléy, A. L. Swindlehurst, and B. Ottersten, “Spatial signature esti-mation for uniform linear arrays with unknown recever gain and phases,”IEEE Trans. Signal Process., vol. 47, no. 8, pp. 2128–2138, Aug. 1999.
[30] A. Paulraj and T. Kailath, “Direction of arrival estimation by eigenstruc-ture methods with imperfect spatial coherence of wave fronts,” J. Acoust.Soc. Amer., vol. 83, no. 3, pp. 1034–1040, Mar. 1988.
[31] T. Trump and B. Ottersten, “Estimation of nominal direction of arrivaland angular spread using an array of sensors,” Signal Process., vol. 50,no. 4, pp. 57–70, Apr. 1996.
[32] A. B. Gershman, C. F. Mecklenbräuker, and J. F. Böhme, “Matrix fit-ting approach to direction of arrival estimation with imperfect spatialcoherence of wavefronts,” IEEE Trans. Signal Process., vol. 45, no. 7,pp. 1894–1899, Jul. 1997.
[33] O. Besson, F. Vincent, P. Stoica, and A. B. Gershman, “Approximatemaximum likelihood estimators for array processing in multiplicativenoise environments,” IEEE Trans. Signal Process., vol. 48, no. 9, pp.2506–2518, Sep. 2000.
[34] A. B. Gershman and P. Stoica, “Direction finding using data-supportedoptimization,” Circuits, Syst., Signal Process., vol. 20, no. 5, pp.541–549, Oct. 2001.
Sergiy A. Vorobyov (M’02) was born in Ukraine in1972. He received the M.S. and Ph.D. degrees in sys-tems and control from Kharkiv National University ofRadioelectronics (KNUR), Kharkiv, Ukraine, in 1994and 1997, respectively.
From 1995 to 2000, he was with the Control andSystems Research Laboratory at KNUR, where hebecame a Senior Research Scientist in 1999. From1999 to 2001, he was with the Brain Science Institute,RIKEN, Tokyo, Japan, as a Research Scientist. From2001 to 2003, he was with the Department of Elec-
trical and Computer Engineering, McMaster University, Hamilton, ON, Canada,as a Postdoctoral Fellow. Since 2003, he has been a Research Fellow with theDepartment of Communication Systems, University of Duisburg-Essen, Duis-burg, Germany. He also held short-time visiting appointments at the Institute ofApplied Computer Science, Karlsruhe, Germany, and Gerhard-Mercator Uni-versity, Duisburg. His research interests include control theory, statistical arraysignal processing, blind source separation, robust adaptive beamforming, andwireless and multicarrier communications.
Dr. Vorobyov was a recipient of the 1996–1998 Young Scientist Fellowship ofthe Ukrainian Cabinet of Ministers, the 1996 and 1997 Young Scientist ResearchGrants from the George Soros Foundation, and the 1999 DAAD Fellowship(Germany).
Alex B. Gershman (M’97–SM’98) received theDiploma (M.Sc.) and Ph.D. degrees in radiophysicsfrom the Nizhny Novgorod State University, NizhnyNovgorod, Russia, in 1984 and 1990, respectively.
From 1984 to 1989, he was with the Ra-diotechnical and Radiophysical Institutes, NizhnyNovgorod. From 1989 to 1997, he was with theInstitute of Applied Physics, Russian Academy ofScience, Nizhny Novgorod, as a Senior ResearchScientist. From the summer of 1994 until the begin-ning of 1995, he was a Visiting Research Fellow at
the Swiss Federal Institute of Technology, Lausanne, Switzerland. From 1995to 1997, he was Alexander von Humboldt Fellow at Ruhr University, Bochum,Germany. From 1997 to 1999, he was a Research Associate at the Departmentof Electrical Engineering, Ruhr University. In 1999, he joined the Departmentof Electrical and Computer Engineering, McMaster University, Hamilton,ON, Canada where he is now a Professor. Currently, he also holds a visitingprofessorship at the Department of Communication Systems, University ofDuisburg-Essen, Duisburg, Germany. His research interests are in the areaof signal processing and communications, and include statistical and arraysignal processing, adaptive beamforming, spatial diversity in wireless commu-nications, multiuser and MIMO communications, parameter estimation anddetection, and spectral analysis. He has published over 220 technical papers inthese areas.
Dr. Gershman was a recipient of the 1993 International Union of RadioScience (URSI) Young Scientist Award, the 1994 Outstanding Young ScientistPresidential Fellowship (Russia), the 1994 Swiss Academy of EngineeringScience and Branco Weiss Fellowships (Switzerland), and the 1995-1996Alexander von Humboldt Fellowship (Germany). He received the 2000 Pre-mier’s Research Excellence Award of Ontario and the 2001 Wolfgang PaulAward from the Alexander von Humboldt Foundation, Germany. He is also arecipient of the 2002 Young Explorers Prize from the Canadian Institute forAdvanced Research (CIAR), which has honored Canada’s top 20 researchers 40years of age or under. He is an Associate Editor of the IEEE TRANSACTIONS ON
SIGNAL PROCESSING and the EURASIP Journal on Wireless Communicationsand Networking and a Member of the Sensor Array and Multichannel SignalProcessing Technical Committee of the IEEE Signal Processing Society. Hewas Technical Co-Chair of the Third IEEE International Symposium on SignalProcessing and Information Technology, Darmstadt, Germany, in December2003. He is Technical Co-Chair of the Fourth IEEE Workshop on Sensor Arrayand Multichannel Signal Processing, to be held in Waltham, MA, in July 2006.
Kon Max Wong (F’02) was born in Macau. He re-ceived the B.Sc.(Eng), D.I.C., Ph.D., and D.Sc.(Eng)degrees, all in electrical engineering, from theUniversity of London, London, U.K., in 1969, 1972,1974, and 1995, respectively.
He was with the Transmission Division of PlesseyTelecommunications Research Ltd., London, in1969. In October 1970, he was on leave fromPlessey, pursuing postgraduate studies and researchat Imperial College of Science and Technology,London. In 1972, he rejoined Plessey as a research
engineer and worked on digital signal processing and signal transmission. In1976, he joined the Department of Electrical Engineering, Technical Universityof Nova Scotia, Halifax, NS, Canada, and in 1981, he moved to McMasterUniversity, Hamilton, ON, Canada, where he has been a Professor since1985 and served as Chairman of the Department of Electrical and ComputerEngineering from 1986 to 1987 and again from 1988 to 1994. He was onleave as a Visiting Professor at the Department of Electronic Engineering, theChinese University of Hong Kong, from 1997 to 1999. At present, he holdsthe title of NSERC-Mitel Professor of Signal Processing and is the Director ofthe Communication Technology Research Centre at McMaster University. Hisresearch interest is in signal processing and communication theory, and he haspublished over 170 papers in the area.
Prof. Wong was the recipient of the IEE Overseas Premium for the best paperin 1989, is a Fellow of the Institution of Electrical Engineers, a Fellow of theRoyal Statistical Society, and a Fellow of the Institute of Physics. He also servedas an Associate Editor of the IEEE TRANSACTION ON SIGNAL PROCESSING from1996 to 1998 and has been the chairman of the Sensor Array and MultichannelSignal Processing Technical Committee of the Signal Processing Society since1998. He received a medal presented by the International Biographical Centre,Cambridge, U.K., for his “outstanding contributions to the research and educa-tion in signal processing” in May 2000 and was honored with the inclusion ofhis biography in the books Outstanding People of the 20th Century and 2000Outstanding Intellectuals of the 20th Century, which were published by IBC tocelebrate the arrival of the new millennium.
Related Documents


![Multichannel sparse spike inversion - Technionwebee.technion.ac.il/Sites/People/IsraelCohen/Publications/JGE_Oct… · [18, 19] use this 1D BG model in their maximum-likelihood algorithm](https://static.cupdf.com/doc/110x72/5f70afd101555c55025f7e42/multichannel-sparse-spike-inversion-18-19-use-this-1d-bg-model-in-their-maximum-likelihood.jpg)




![IEEE TRANSACTIONS ON INFORMATION THEORY, …models. Sparse superposition codes for this channel were developed in [27], where reliability bounds for the optimal maximum-likelihood](https://static.cupdf.com/doc/110x72/5f3be8b0db344a41fb07736d/ieee-transactions-on-information-theory-models-sparse-superposition-codes-for.jpg)



