MATHS HANDBOOK For [JEE Main & JEE Advanced & NEET] Examination Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) : 1800-212-1799, 8003899588 | url : www.motion.ac.in | : [email protected] MOTION CORPORATE OFFICE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
MATHSHANDBOOK
For [JEE Main & JEE Advanced & NEET] Examination
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) : 1800-212-1799, 8003899588 | url : www.motion.ac.in | : [email protected]
MOTION CORPORATE OFFICE
CONTENTS
S.No. Topic Page No.
1. Calculus 5 – 47
2. Trigonometry 48 – 59
3. Algebra 60 - 87
4. Co-ordinate Geometry 88– 111
5. Vectors - 3D 112 – 124

IIT - JEE SYLLABUS
CALCULUSReal valued functions of a real variable, into, onto and one-to-one functions,sum, difference, product and quotient of two functions, composite functions,absolute value, polynomial, rational, trigonometric, exponential andlogarithmic functions. Limit and continuity of a function, limit and continuityof the sum, difference, product and quotient of two functions, l'Hospital ruleof evaluation of limits of functions. Even and odd functions, inverse of afunction, continuity of composite functions, intermediate value property ofcontinuous functions. Derivative of a function, derivative of the sum, difference,product and quotient of two functions, chain rule, derivatives of polynomial,rational, trigonometric, inverse trigonometric, exponential and logarithmicfunctions. Derivatives of implicit functions, derivatives up to order two,geometrical interpretation of the derivative, tangents and normals, increasingand decreasing functions, maximum and minimum values of a function,applications of Rolle's Theorem and Lagrange's Mean Value Theorem.Integration as the inverse process of differentiation, indefinite integralsof standard functions, definite integrals and their properties, application ofthe Fundamental Theorem of Integral Calculus. Integration by parts,integration by the methods of substitution and partial fractions, application ofdefinite integrals to the determination of areas involving simple curves.Formation of ordinary differential equations, solution of homogeneousdifferential equations, variables separable method, linear first order differentialequations.
TRIGONOMETRYTrigonometric functions, their periodicity and graphs, addition andsubtraction formulae, formulae involving multiple and sub-multiple angles,general solution of trigonometric equations. Relations between sides andangles of a triangle, sine rule, cosine rule, half-angle formula and the area ofa triangle, inverse trigonometric functions (principal value only).
ALGEBRAAlgebra of complex numbers, addition, multiplication, conjugation, polarrepresentation, properties of modulus and principal argument, triangleinequality, cube roots of unity, geometric interpretations. Quadratic equationswith real coefficients, relations between roots and coefficients, formation
of quadratic equations with given roots, symmetric functions of roots. Arithmetic,geometric and harmonic progressions, arithmetic, geometric and harmonicmeans, sums of finite arithmetic and geometric progressions, infinite geometricseries, sums of squares and cubes of the first n natural numbers. Logarithms andtheir properties. Permutations and combinations, Binomial theorem for apositive integral index, properties of binomial coefficients. Matrices as arectangular array of real numbers, equality of matrices, addition, multiplicationby a scalar and product of matrices, transpose of a matrix, determinant of a squarematrix of order up to three, inverse of a square matrix of order up to three, propertiesof these matrix operations, diagonal, symmetric and skew-symmetric matricesand their properties, solutions of simultaneous linear equations in two or three variables.Addition and multiplication rules of probability, conditional probability,independence of events, computation of probability of events using permutationsand combinations.
CO-ORDINATE GEOMETRYTwo dimensions: Cartesian coordinates, distance between two points, sectionformulae, shift of origin.Equation of a straight line in various forms, angle between two lines, distance ofa point from a line. Lines through the point of intersection of two given lines,equation of the bisector of the angle between two lines, concurrency of lines,centroid, orthocentre, incentre and circumcentre of a triangle. Equation of a circlein various forms, equations of tangent, normal and chord. Parametric equations of acircle, intersection of a circle with a straight line or a circle, equation of a circlethrough the points of intersection of two circles and those of a circle and a straightline. Equations of a parabola, ellipse and hyperbola in standard form, their foci,directrices and eccentricity, parametric equations, equations of tangent and normal.
VECTORS & 3-D GEOMETRYAddition of vectors, scalar multiplication, scalar products, dot and cross products,scalar triple products and their geometrical interpretations. Locus Problems. Threedimensions: Direction cosines and direction ratios, equation of a straight line inspace, equation of a plane, distance of a point from a plane.

Page : 5 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
PART-I
CALCULUSA. Definition :
Function is defined as a rule or a manner or a mapping or a correspondence f whichmaps each & every element of a set A with a unique element of set B. It is denoted by
: f : A B or A f B.
B. Domain, Co-domain and Range : If a function f is defined f : A B set A is calledthe domain of function f and set B is called the co-domain of function f. The set of thef-images of the elements of A is called the Range of function f.
C. Important Type of Functions :(1) Trigonometric Functions :
Function Domain Rangesinx x R y [ 1,1]cos x x R y [ 1,1]
tan x x R (2n 1) y R2
cot x x R {n } y R
sec x x R (2n 1) y ( , 1] [1, )2
cosec x R {n } y ( , 1] [1, )
(2) Polynomial Function :f(x) = a0xn + a1xn–1+ a2xn–2 + ... + an
Domain x R(3) Algebraic Function : A function is called an algebraic function if it can be
constructed using algebraic operations. Function which are not algebraic are calledas transcendental function.
(4) Rational function :
f(x) = )x(h)x(g
both are polynomial and h(x) 0.

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 6
(5) Logarithm Function :f(x) = logax (where x > 0, a > 0, a 1)(a) 0 < a < 1 (b) a > 1 f(x) = logax f(x) = nx
f(x)
(1, 0)x
RyRange),0(xDomain
f(x)
(1, 0)x
(6) Exponential Functions : f(x) = ax {a > 0, a 1}(a) 0 < a < 1 (b) a > 1
(1, 0) (1, 0)
Domain x R ; Range y (0, )(7) Absolute value function : (Modulus function)
}0{Ry:y,0x;x0x:D,0x;x
|x|yf
f y = –x y =
x
(8) Signum Function :
y = Sgn (x) =
0x;10x;00x;1
0 x
y
–1
1
Df : x R ; Rf : y {–1, 0, 1}
(9) Greatest Integer function (Step-up function):
y = f(x) = [x] =
Otherwise,'x'thanlessregeintGreatestIx,x
Properties :(a) [x] x < [x]+1(b) [x + m] = [x]+m, m
(c) [x] + [–x] =
x,1x,0
1 2–1
0
1
–1

Page : 7 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(10) Fractional part function :
y = f(x) = {x} ,
]1,0[y,RangeRx,Domain
Properties :(a) Fractional part of any integer is zero.(b) {x + n} = {x} , n I
(c) {x} + {– x}=
y,1x,0
1
–1 0 1 2 3
(11) Equal or Identical Functions :'f' & 'g' are said to be identical if :
(a) Df = Dg(b) Rf = Rg(c) f(x) = g(x) corresponding x (their common domain)
D. Classification of function :(1) One-One Function :
A function f : A B issaid to be one-one if
1
2
3
A
x
y
z
B
different elements of 'A'have different 'f' images in 'B'.
(2) Many-One Function :A function f : A B issaid to be many one if
1
2
3
A
xy
B
two or more elementsof 'A' have the same 'f' image in'B'.
(3) Onto Function : If the function f : A B is such that each element in 'B' is thef-image of at least one element of 'A' then 'f' is onto.
1
2
3
A
x
y
z
B
or 1
2
3
A
xy
B

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 8
(4) Into function : If f : A B is such that thereexists atleast oneelement in co-domain 1
23
A
xyz
B
w
which is not the imageof any element indomain, then f(x) is into.
(5) Composite Function :If we have f : A B & g : B C be two function then gof : A C is defined bygof (x) = g(f(x)) x A it is called composite function of ' f ' & 'g'.
x f(x) g(x)f(x)
g(f(x))
(6) Identity function : A function f : A A is defined by f(x) = x x A is called theidentity function of 'A'.
(7) Constant Function : A function f : A B is said to be a constant function if everyelement of set A has the same f-image in set 'B'
(8) Homogeneous Functions : A function is said to be homogeneous w.r.t. any setof variables when each of its term is of the same degree w.r.t. those variables. e.g.f(x, y) = 5x2 + 3xy – 2y2
(9) Even function : If a function f(x) is defined in symmetrical interval (–a, a) & if
)x(f)x(f then f(x) is called even function. e.g. f(x) = x2, f(x) = |x|.
(10)Odd function : If a function f(x) is defined in symmetrical interval (–a, a) & if
)x(f)x(f then f(x) is odd functions. e.g. f(x) = x3, sin x
(11) Periodic Function : A function f(x) is called periodic if there exists a positivenumber 'T' (T > 0) called the period of function such that f(x + T) = f(x) x with inthe domain of 'f'.In a periodic function if constant be added, subtracted, multiplied or divided thenits period doesn't change.
Page : 9 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
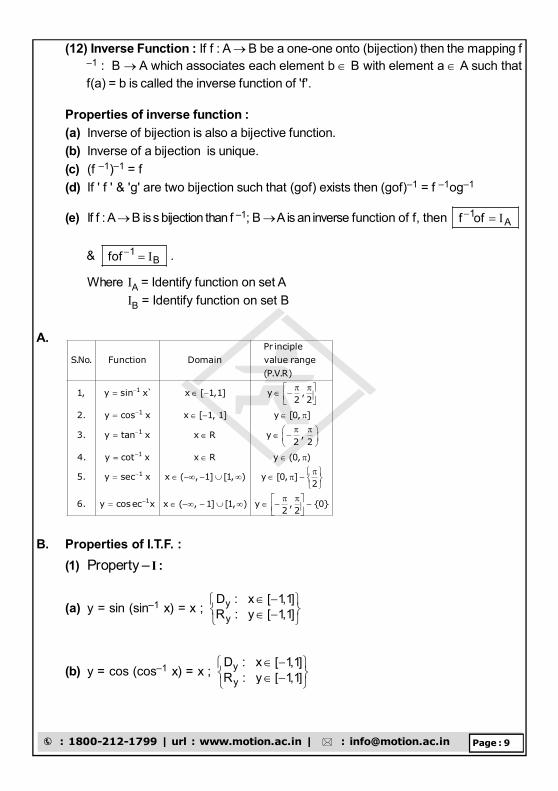
(12) Inverse Function : If f : A B be a one-one onto (bijection) then the mapping f–1 : B A which associates each element b B with element a A such thatf(a) = b is called the inverse function of 'f'.
Properties of inverse function :(a) Inverse of bijection is also a bijective function.(b) Inverse of a bijection is unique.(c) (f –1)–1 = f(d) If ' f ' & 'g' are two bijection such that (gof) exists then (gof)–1 = f –1og–1
(e) If f : A B is s bijection than f –1; B A is an inverse function of f, then A1off
& B1fof .
Where IA = Identify function on set AIB = Identify function on set B
A.
1
1
1
1
1
Pr incipleS.No. Function Domain value range
(P.V.R)
1, y sin x x [ 1,1] y ,2 2
2. y cos x x [ 1, 1] y [0, ]
3. y tan x x R y ,2 2
4. y cot x x R y (0, )
5. y sec x x ( , 1] [1, ) y [0, ]2
6. y cosec
1x x ( , 1] [1, ) y , {0}2 2
B. Properties of I.T.F. :(1) Property – I :
(a) y = sin (sin–1 x) = x ; yy
D : x [ 1,1]R : y [ 1,1]
(b) y = cos (cos–1 x) = x ; yy
D : x [ 1,1]R : y [ 1,1]
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 10
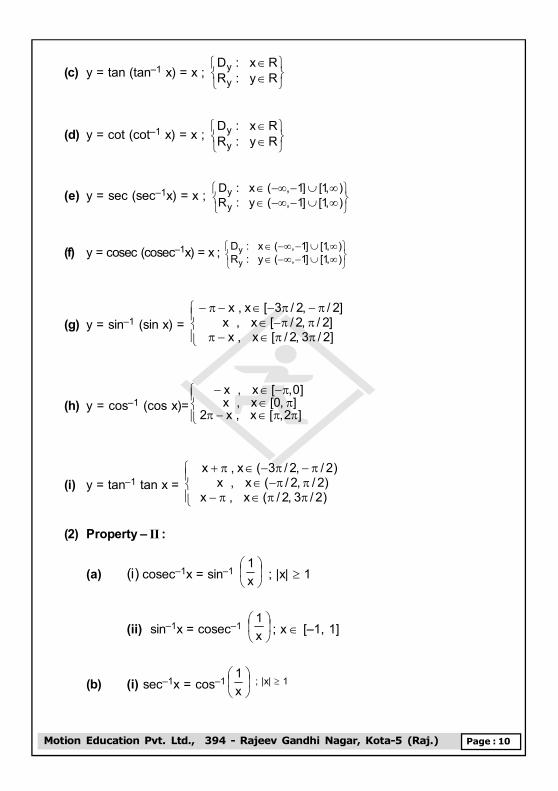
(c) y = tan (tan–1 x) = x ; yy
D : x RR : y R
(d) y = cot (cot–1 x) = x ; yy
D : x RR : y R
(e) y = sec (sec–1x) = x ; yy
D : x ( , 1] [1, )R : y ( , 1] [1, )
(f) y = cosec (cosec–1x) = x ; yy
D : x ( , 1] [1, )R : y ( , 1] [1, )
(g) y = sin–1 (sin x) =
]2/3,2/[x,x]2/,2/[x,x
]2/,2/3[x,x
(h) y = cos–1 (cos x)=x , x [ ,0]x , x [0, ]
2 x , x [ ,2 ]
(i) y = tan–1 tan x =
)2/3,2/(x,x)2/,2/(x,x
)2/,2/3(x,x
(2) Property – II :
(a) (i) cosec–1x = sin–1
x1
; |x| 1
(ii) sin–1x = cosec–1
x1
; x [–1, 1]
(b) (i) sec–1x = cos–1
x1
; |x| 1

Page : 11 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(ii) cos–1 x = sec–1
x1
; |x| 1
(iii) cot–1x =
0x;x1tan
0x;x1tan
1
1
(3) Property – III :
(a) 1 11 1
1 1
sin ( x) sin xtan ( x) tan xcosec ( x) cosec x
(b) 1 11 11 1
cos ( x) cos xcot ( x) cot xsec ( x) sec x
(4) Property – IV :
(a) sin–1x + cos–1x = 2
; |x| 1
(b) tan–1x + cot–1x = 2
; x R
(c) sec–1x + cosec–1x = 2
; |x| 1
(5) Property – V :(a) tan–1x + tan–1y
=
1
1
x ytan ; x 0, y 0, xy 11 xy
x ytan ; x 0, y 0, xy 11 xy

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 12
(b) tan–1x – tan–1y = tan–1
xy1yx
; 0y0x
(c) sin–1x + sin–1y
= 1 2 2
2 2
1 2 22 2
x 0,y 0sin (x 1 y y 1 x ) ; x y 1x 0,y 0sin (x 1 y y 1 x ) ; x y 1
(d) sin–1 x – sin–1y
= sin–1(x 21 y – y 21 x ) ; x 0, y 0
(e) cos–1 + cos–1y
= cos–1 (xy– 2x1 2y1 ) ; x 0, y 0
(f) cos–1x cos–1y
= 1 2 2
1 2 2cos (xy 1 x 1 y ) ; x 0, y 0cos (xy 1 x 1 y ) ; x 0, y 0
A. Indeterminate form : Sometimes we come across with some function which do nothave definite value corresponding to some particular value of the variable for e.g.
f(x) = 2x4x2
, f(2) =
2244
=
00
&
00
can't be determined hence it is indeterminate form.
Some more indeterminate forms are :
0 00 , 0 , 1 , , ,
B. Limit of a function : Let y = f(x) be a function of 'x'. Let us suppose that value of 'y'is indeterminate for x = a. So now in this case we will consider the values of functionat these points which are very near to 'a'. If these values tend to a definite uniquenumber '' as x tends to'a' (either from left or right) then '' will be the limit of f(x) at
x = a, i.e.x alim f(x)
Page : 13 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
C. Left hand limit :To find LHS of f(x) at x = a, we go as follows :
(1) Write x alim f(x)
(x a– because we are approaching 'a' from LHS)
(2) Replace x by (a – h) & limit (x a–) by (h 0) to get 0h
lim
f(a – h)
(3) Solve 0h
lim
f(a – h)
D. Right hand limit :To find RHL of f(x) at x = a we go as follows :
(1) Write ax
lim f(x) (x a+, because we are approaching 'a' from RHS)
(2) Replace x by (a + h) & limit (x a+) by (h 0) to get 0h
lim
f(a + h)
(3) Solve 0h
lim
f(a + h)
E. Fundamental theorems on limit :
If cxlim f(x) exists & equal to '' & if
cxlim
g(x) exists & equal to 'm' then :
(1)cx
lim
(f(x) + g(x)) = cx
lim
f(x) + cx
lim
g(x) = + m
(2) cxlim (f(x) – g(x)) = cx
lim f(x) – cx
lim g(x) = – m
(3) cxlim (f(x).g(x)) = cx
lim f(x). cx
lim g(x) = .m.
(4) cxlim )x(g
)x(f = )x(glim
)x(flim
cx
cx
=
m
, (m 0)
(5) cxlim kf(x) = k cx
lim f(x)
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 14
F. Various strategies to evaluate limits :Algebraic Methods :
(1) Factorization : If f(x) is of the form )x(g)x(f
& of indeterminate form then this form is
removed by factorising g(x) & f(x) & cancel the common factors, then put thevalue of 'x'.
(2) Rationalisation method : In this method we rationalise the factor containing thesquare root & simplify & then we put the value of 'x'.
(3) Binomial Expansion :
(1 + x)n = 1 + nx + 2n(n 1)x
2!
+3n(n 1)(n 2)x
3!
+ .....
Remark : (a) '|x|' must be less then '1'(b) No. of terms in this expansion is infinity
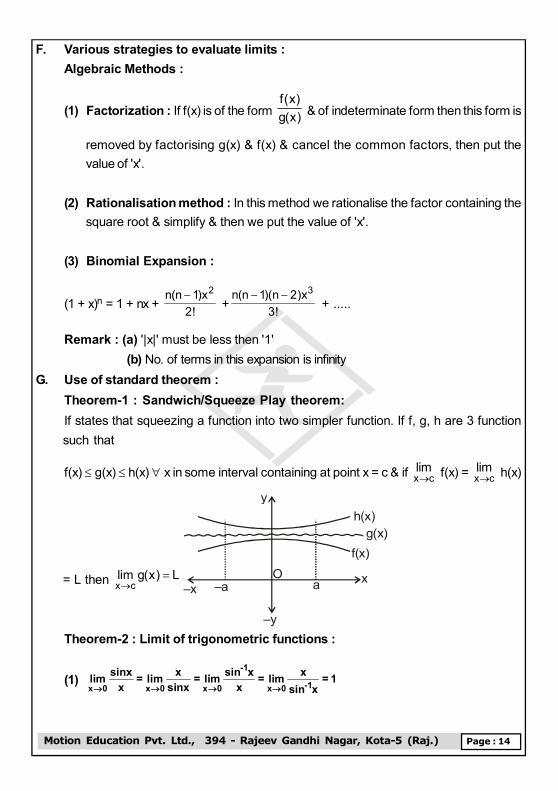
G. Use of standard theorem :Theorem-1 : Sandwich/Squeeze Play theorem:If states that squeezing a function into two simpler function. If f, g, h are 3 functionsuch that
f(x) g(x) h(x) x in some interval containing at point x = c & if cxlim f(x) = cx
lim h(x)
= L then x clim g(x) L
y
–y
–x –aO
a x
f(x)g(x)
h(x)
Theorem-2 : Limit of trigonometric functions :
(1)-1
-1x 0 x 0 x 0 x 0
sinx x sin x xlim = lim = lim = lim = 1x sinx x sin x
Page : 15 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
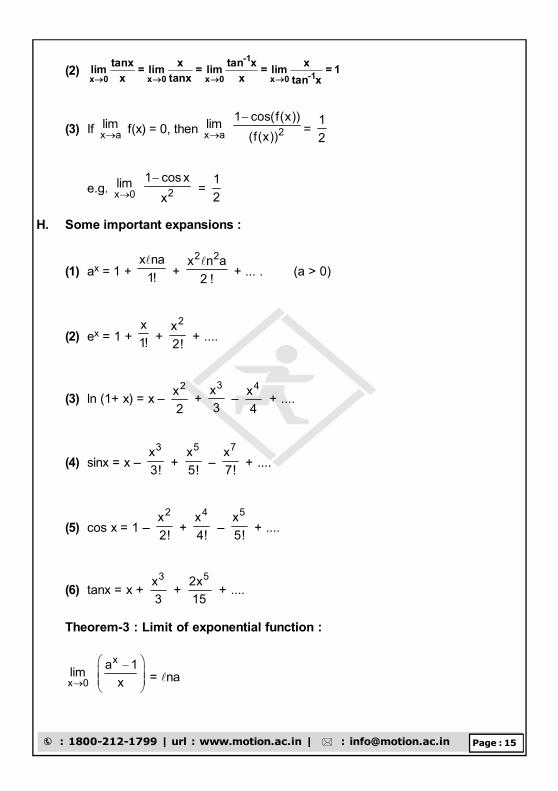
(2)-1
-1x 0 x 0 x 0 x 0
tanx x tan x xlim = lim = lim = lim = 1x tanx x tan x
(3) If axlim f(x) = 0, then ax
lim 2))x(f(
))x(fcos(1=
21
e.g. 0xlim 2x
xcos1 =
21
H. Some important expansions :
(1) ax = 1 + !1nax
+ !2anx 22
+ ... . (a > 0)
(2) ex = 1 + !1x
+ !2x2
+ ....
(3) ln (1+ x) = x – 2x2
+ 3x3
– 4x4
+ ....
(4) sinx = x – !3x3
+ !5x5
– !7x7
+ ....
(5) cos x = 1 – !2x2
+ !4x4
– !5x5
+ ....
(6) tanx = x + 3x3
+ 15x2 5
+ ....
Theorem-3 : Limit of exponential function :
0xlim
xa 1x
= na

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 16
If base is 'e' then 0xlim
xe 1x
= 1 or xlim
x1
1e x1
= 1
Theorem- 4 : 1 forms :
1 xx
x 0 x
1lim (1 x) e lim 1x
Also remember, x 0
n(1 x)lim 1x
I. Generalised formula for 1 form :
If we have axlim [f(x)]g(x) & ax
lim f(x)1
& axlim g(x) then ax
lim (f(x))g(x) will be 1 form & it will be equal to 'e' where
x alim (f(x) 1)g(x)
Theorem-5 : Binomial limits : n n
n 1x a
x alim nax a
Remark : ONE SIDED LIMIT : We always talk in the domain of the function i.e., if
0xLim x is asked then we will find only RHL. And this is called one sided limit.
J. Some special limits :
(1) 0xLim 2
x
xx1e
= 21
(2) 0xLim 3x
xsinx =
61
Page : 17 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(3) 0xLim 3x
xtanx = –
31
(4) 0xLim 3
xx
xx2ee
= 31
A. Mathematical definition of continuity :
A function f(x) is said to be continuous at x = a iff, axLim f(x) exists means ax
Lim f(x)
= axLim f(x) & is equal to f(a) i.e. ax
Lim f(x) = axLim f(x) = f(a)
B. Continuity in an interval :
(1) A function f(x) is said to be continuous in (a, b) if it is continuous at each & every
point ‘c’ (a, b).
(2) A function f(x) is said to be continuous in [a, b] if
(a) f(x) is continuous is (a, b).
(b) f(x) is right continuous at x = a.
i.e. axLim f(x) = f(a) = a finite quantity
(c) f(x) is left continuous at x = b,
i.e. axLim f(x) = f(b) = a finite quantity
C. Types of discontinuity :
(1) Removable type discontinuity :
This type of discontinuity occurs when axLim f(x) exists but is either not equals to
f(a) or f(a) is not defined. Its sub parts are

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 18
(a) Missing point discontinuity : Limit exist but the value of the function is not
defined.(b) Isolated point discontinuity : Limit exist but is not equal to the value of function
at that point
(2) Irremovable type discontinuity : It occurs only when axLim f(x) does not exists.
It is of 3 types(a) Finite type : RHL LHL(b) Infinite type : one or both of LHL & RHL does not exist(c) Oscillatory type : value of the limit is finite but not a unique value
D. Theorems of Continuity :Theorem-1 : If ‘f’ & ‘g’ are continuous at x = a, then f ± g, f.g. will also be continuous
at x = a. gf
will also be continuous provided g(a) 0
Theorem-2 : If ‘f’ is continuous at x = a & ‘g’ is discontinuous at x = a then f ± g mustbe discontinuous at x = aTheorem-3 : If f(x) & g(x) are discontinuous at x = a then the function f.g. isnot necessarity be discontinuous at x = a.Theorem-4 : Intermediate value theorem :
If ‘f’ is continuous on [a, b] & f(a) f(b) then for any value c (f(a), f(b)) there existsat least one number x0 (a, b) such that f(x0) = c
f(a)
a x b
cf(b)
Alternatively : If f(x) is continuous in [a, b] and f(a) & f(b) have opposite signsthen the equation f(x) = 0 has at least one root in (a, b).
x1 b
f(a)
a
f(b)
f(a)
af(b)
x2 x3
bx1

Page : 19 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
E. Differentiability : Differentiability at x = a geometrically means that a unique tangent withfinite slope can be drawn at x = a.(1) Left Hand Derivative (LHD) :
LHD of f(x) at x = a is given by :
f ’(a–) = h
)a(f)ha(f
; (h > 0)
(2) Right Hand derivative (RHD) :
RHD of f(x) at x = a is given by :
f ’(a+) = 0hLim
h)a(f)ha(f
; (h > 0)
LHD
RHDB
B' A
F. Some special points :
(1) If ‘f’ is differentiable at x = a then it is also continuous at x = a but vice - versa
is not true.
(2) If ‘f’ is discontinuous at x = a then it will be non differentiable at x = a.
G. Differentiability over an interval :
(1) A function f(x) is said to lie differentiable over (a, b) if it is differentiable at each
& every point ‘c’ (a, b)
(2) A function f(x) is said to be differentiable over [a, b] if
(a) It is differentiable in (a, b)
(b) It is right differentiable at x = a.
(c) It is left differentiable at x = b.

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 20
I. Theorems of differentiability :
Theorem-1 : If ‘f’ & ‘g’ are two differentiable functions then:
f ± g Differentiable at x = a
f . g Differentiable at x = a
f/g Differentiable at x = a, provided g(a) 0
Theorem-2 : If ‘f’ is differentiable but ‘g’ is not differentiable at x = a then f ±
g must be non - dif ferentiable at x = a
Theorem-3 : If ‘f’ & ‘g’ are non differentiable then nothing definite can be said about :
f ± g & f . g.
Theorem-4 : If ‘f’ is differentiable at x = a & f(a) = 0 & g(x) is continuous at x = a then
the product function F(x) = f(x) . g(x) will be differentiable at x = a.
A. Derivative by first principle :
x)x(f)xx(fLim)x('f.e.i
xyLim
dxdy
0x0x
Instanteneous rate of change of
y w.r.t. x.
Remark : If y = f(x) then the symbol Dy, dxdy
, y1, y’, f’(x) all denotes differentiation of
y w.r.t. x. &
dSdt
S , ddtθ ( denotes differentiation w.r.t. time)
B. Differentiation of some standard functions :
(1) dxd
(ax) = a (2) dxd
(xn) = nxn–1
(3) dxd
(ex) = ex (4) dxd
(ax) = ax loge a ; a > 0
(5) (loge x) = x1
(6) dxd
(loga x) = alogx1
Page : 21 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(7) dxd
(sin x) = cos x (8) dxd
(cos x) = – sin x
(9) dxd
(tan x) = sec2 x (10) dxd
(cot x) = – cosec2 x
(11)dxd
(sec x) = sec x tan x (12) dxd
(cosec x) = – cosec x cot x
(13)dxd
(sin–1 x) = 2x1
1
(14)
dxd
(cos–1 x) = – 2x1
1
(15)dxd
(tan–1 x) = 2x11
(16)dxd
(cot–1 x) = – 2x11
(17)dxd
(sec–1 x) = 1x|x|
12
, | x | > 1
(18)dxd
(cosec–1 x) = – 1x|x|
12
, | x | > 1
C. Fundamental rules for differentiation :
Rule : 1 (PRODUCT RULE) If f(x) and g(x) are two differentiable functions then f(x)
g(x) is also differentiable such that
)x(g.)}x(f{dxd)}x(g{
dxd)x(f)]x(g.)x(f[
dxd
Remark : If three functions are involved like f(x), g(x) & h(x) then
2)'fg(h)'fh(g)'gh(f)hgf(
dxd

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 22
or )fg('h)fh('g)gh('f)hgf(dxd
Rule : 2 (QUOTIENT RULE) : If f(x) and g(x) are two differentiable functions and
g(x) 0 then )x(g)x(f
is also differentiable such that
2)}x(g{
)}x(g{dxd.)x(f)}x(f{
dxd.)x(g
)x(g)x(f
dxd
Rule : 3 (CHAIN RULE) If y = f(u) and u = g(x) are two differentiable functions then
dxdu.
dudy
dxdy
D. Logarithmic Differentiation : To find the derivative of
(1) A function which is the product or quotient of several factor.
(2) A function of the form [f(x)]g(x) where f & g are differentiable. If is found to convinent
that first take log of the function and then differentiate.
y = [f(x)]g(x) log y = g(x) log [f(x)]
y1
. dxdy
= dxd
g(x) . log[f(x)]
dxdy
= [f(x)]g(x) .
)]x(flog)x(g[
dxd
E. Parametric Differentiation : To find dxdy
in case of parametric functions, we first
obtain the relationship between x and y by eliminating the parameter t and then we
Page : 23 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
differentiate it with respect to x.
If x = f(t) & y = g(t) then dt/dxdt/dy
dxdy
where t parameter
F. Differentiation of a function w.r.t. another function: To find the derivative of f(x)
w.r.t. g(x), we first differentiate both w.r.t. x and then divide the derivative of f(x) w.r.t.
x by the derivative of g(x) w.r.t. x.
Let y = f(x) & z = g(x) be two function of x
dy dy / dx diff. of f(x) w.r.t. x f '(x)dz dz / dx diff. of g(x) w.r.t. x g'(x)
G. Differentiation of implicit functions (x, y) = 0 : To find dxdy
in the case of implicit
equation. We differentiate each term w.r.t. x regarding y as a function of x and then
collect all the term containing dxdy
together on one side to find dxdy
.
H. Differentiation of Inverse Functions :If f(x) and g(y) are inverse functions of each other and is defined by y = f(x) & x
= g(y) If f ’(x) exist and f ’(x) 0 then g’(y) = )x('f1
. This result can also be written
as dydx
= dx/dy1
I. L’Hospital Rule (Statement) : If f(x) & g(x) are two functions such that
(1) x aLim f(x) = 0 & x a
Lim g(x) = 0

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 24
(2) f(x) & g(x) are differentiable at x = a
i.e. x aLim f(x) = f(a) = 0, x a
Lim g(x) = g(a) = 0
(3) f ’(x) & g’(x) are continuous at x = a then axLim )x(g
)x(f = ax
Lim )x('g
)x('f = ax
Lim )x(''g
)x(''f
= ...............till the indeterminant form vanishes.
J. Differentiation by trigonometrical substitutions:Some times before differentiation, we reduce the given function in a simpleform using suitable trigonometrical or algebric transformations.
Function Substitution
(1) 22 xa x = a sin or a cos
(2) 22 ax x = a tan or a cot
(3) 22 ax x = a sec or a cosec
(4)xaxa
x = a cos 2
(5) 22
22
xaxa
x2 = a2 cos 2
(6) 2xax x = a sin2
(7)xa
x
x = a tan2
(8)xa
x
x = a sin2

Page : 25 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(9) )bx)(ax( x = a sec2 – b tan2
(10) )xb)(ax( x = a cos2 + b sin2
K. Differentiation of infinite series :
(1) If y = f(x) f(x) f(x)... then dy f '(x)dx 2y 1
(2) If ...f (x)f (x)y f(x) then
)]x(flogy1)[x(f)x('fy
dxdy 2
(3) If
........)x(f
1)x(f1)x(f
1)x(fy
then
dxdy
= )x(fy2)x('fy
L. nth Derivatives of some standard functions :
(1) n
n
dxd
sin (ax + b) = an sin n ax b2
(2) n
n
dxd
cos (ax + b) = an cos
bax2
n
(3) n
n
dxd
(ax + b)m = )!nm(!m
an (ax+b)m – n, where m > n
(4) n
n
dxd
(log (ax + b)) = n
n1n
)bax(a)!1n()1(
(5) n
n
dxd
(eax) = an eax (6) n
xn
dx)a(d
= ax (log a)n

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 26
(7) n
n
dxd
(eax sin (bx + c)) = rn eax sin (bx + c + n)
where r = 22 ba ; = tan–1 ab
(8) n
n
dxd
eax cos (bx + c) = rn eax cos (bx + c + n)
A. Integration of a function : Is defined as anti -derivative that is reverse process or
phenomena of differentiation. If dxd
[f(x) + c] = f(x)
c)x(fdx)x(f
sign of integrationIntegrand
Integral/Primitive/Antiderivativeof f(x)
Constant of integration
w.r.t. x
B. Some Standard Integrals :
(1) xn dx = c1n
x 1n
, n –1 (2) (ax + b)n dx = c
)1n(a)bax( 1n
(3) c|x|ndxx1 (4) )bax(
dx =
n | ax b |a
+ c
(5) ax dx = anax
+ c (6) apx + q dx = px qa
p n a
+ c

Page : 27 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(7) ex dx = ex + c (8) sin x dx = – cos x + c
(9) cos x dx = sin x + c (10) sec2 x dx = tan x + c
(11) cosec2 x dx = – cot x + c (12) sec x tan x dx = sec x + c
(13) cosec x cot x dx = – cosec x + c (14) 2x1dx
= tan–1 x + c
(15) 22 xadx
= a1
tan–1 ax
+ c (16) 2x1
dx
= sin–1 x + c
(17) 22 xa
dx
= sin–1
ax
+ c (18) 1x|x|
dx2
= sec–1 x + c
(19) 22 ax|x|
dx
=
a1
sec–1 ax
+ c
(20) tan x dx = n |sec x| + c = – n |cos x| + c
(21) cot x dx = n |sin x| + c
(22) sec x dx = n (sec x + tan x) + c = n tan
2x
4 + c
(23) cosec x dx = n (cosec x – cot x) + c = n
2xtan + c
(24) 2 2
dx
x a = n caxx 22
(25) 22 ax
dx
= n caxx 22

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 28
(26) dxxa 22 =2x 22 xa +
2a2
sin–1
ax
+ c
(27) 22 ax dx
= 2x
22 xa + 2
a2 n (x + 22 ax ) + c
(28) 22 ax dx
= 2x 22 ax –
2a2
n (x + 22 ax ) + c
(29) eax cos bx dx =)ba(
e22
ax
(a cos bx + b sin bx)+c
(30) eax sin bx dx =)ba(
e22
ax
(a sin bx – b cos bx)+c
(31) 22 xadx
= a21
n a xa x + c
(32) 2 2dx
x a =
a21
n x ax a + c
C. Integration by substitution : (change of variables)
f [(x)] ’(x) dx f(t) dt
{Put (x) = t ’(x) dx = dt}

Page : 29 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
Integrand Form Substitution
(1) 22 xa or 22 xa
1
x = a sin or a cos
(2) 22 ax or 22 ax
1
x = a tan
(3) 22 ax or 22 ax
1
x = a sec
(4) xa
x
or a x
x
x = a tan2
or x(a x) or1
x(a x)
(5) xa
x
orx
xa x = a sin2
or )xa(x or )xa(x1
(6) ax
x
orx
ax x = a sec2
or )ax(x or )ax(x1
(7) xaxa
orxaxa
x = a cos 2
(8) xx
or )x()x( ( > ) x = cos2 + sin2
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 30
D. Integration by parts :(1) If u and v are two functions of x then
u . v dx = u v dx – ( dxdu
. (v dx)) dx I II
(2) ex [f(x) + f ’(x)]dx = ex f(x) + c
(3) [f(x) + x f ’(x)] dx = x f(x) + c
E. Integration using partial fraction :Rule : 1 (When Dr has non-repeated linear factors)
)cx()bx()ax(qpx
= )ax(A + )bx(
B + )cx(
C
Rule : 2 (When Dr contain Repeated linear factors)
2)bx()ax(qpx
= )ax(
A + )bx(
B + 2)bx(
C
Rule : 3 (When Dr contain Non-repeated Quad. factors)
2
2px q
(x a)(x bx c)
=
A(x a) + 2
Bx C(x bx c)
Rule : 4 (When Dr contain repeated Quad. factors)
2
2 2px q
(x a)(x bx c)
=
A(x a)
+ 2Bx C
(x bx c)
+ 2 2Dx E
(x bx c)
F. Integration of irrational function :
Type - 1 : qpx)bax(dx
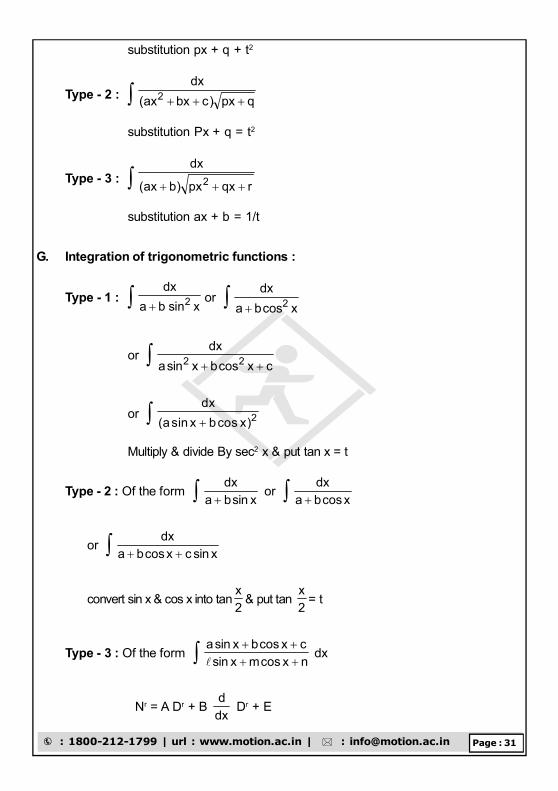
Page : 31 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
substitution px + q + t2
Type - 2 : qpx)cbxax(dx
2
substitution Px + q = t2
Type - 3 : rqxpx)bax(
dx2
substitution ax + b = 1/t
G. Integration of trigonometric functions :
Type - 1 : xsinbadx
2or xcosba
dx2
or cxcosbxsinadx
22
or 2dx
(asin x bcos x)
Multiply & divide By sec2 x & put tan x = t
Type - 2 : Of the form xsinbadx
or xcosba
dx
or xsincxcosbadx
convert sin x & cos x into tan2x
& put tan 2x
= t
Type - 3 : Of the form nxcosmxsincxcosbxsina
dx
Nr = A Dr + B dxd
Dr + E

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 32
I = A 1.dx + B r
r
D
Ddxd
dx + E nxcosmxsindx
Integral of the form 2
4 2x 1 dx
x kx 1
or 1kxx
1x24
2
dx
To solve divide Nr & Dr by x2
A. Definition : If dxd
[f(x)] = (x) )a(f)b(fdx)x(b
a
(1) If b
a
0dx)x(f & f(x) is continuous is (a, b). Then equation f(x) = 0 must have
atleast one root in (a, b) but converse is not true.
(2)
)b(g
)a(g
b
a
1
1
)x('g.)x(f))x(g(d)x(f dx
(3) If g be the inverse of f & f(a) = c, f(b) = d
Then I = acbddy)y(gdx)x(fc
c
b
a
(4)
2/
0
2/
0
1dxxcosdxxsin
(5)
2/
0
22/
0
24
dxxcosdxxsin
(6)
2/
0
32/
0
332dxxcosdxxsin
(7)/2 /2
4 4
0 0
3sin x dx cos x dx16
Page : 33 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
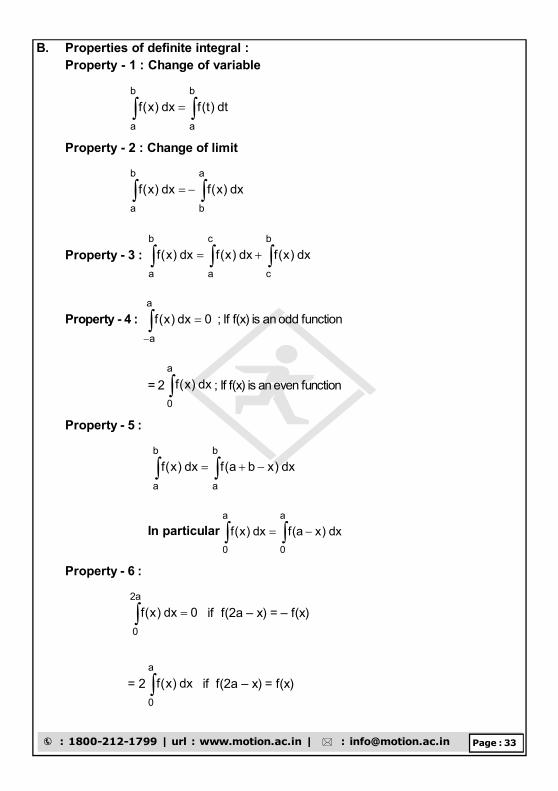
B. Properties of definite integral :Property - 1 : Change of variable
b
a
b
a
dt)t(fdx)x(f
Property - 2 : Change of limit
a
b
b
a
dx)x(fdx)x(f
Property - 3 : b
c
c
a
b
a
dx)x(fdx)x(fdx)x(f
Property - 4 : 0dx)x(fa
a
; If f(x) is an odd function
= 2 a
0
dx)x(f ; If f(x) is an even function
Property - 5 :
b
a
b
a
dx)xba(fdx)x(f
In particular a
0
a
0
dx)xa(fdx)x(f
Property - 6 :
0dx)x(fa2
0
if f(2a – x) = – f(x)
= 2 a
0
dx)x(f if f(2a – x) = f(x)

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 34
Property - 7 :
T
0
nT
0
dx)x(fndx)x(f
where T period of f(x) ; n N
C. Leibnitz Rule :
dxd
)x('g)]x(g[f)x('h.)]x(h[fdt)t(f)x(h
)x(g
f(t) must be function of “t” onlyD. Some important formula :
(1)
2/
0
2/
0
.2log)2/(dxxcoslogdxxsinlog
(2) Walli’s formula (Reduction formula) :
(a) /2
n
0
sin x dx
/2
n
0
cos x dx
(n 1) (n 3) 2...... .1(n is odd)
n (n 2) 3
= )evenisn(22
1..........)2n()3n(
n)1n(
(b)
2/
0
nm dxxcosxsin
[(m 1)(m 3)...(1or 2)][ (n 1) (n 3)...(1or 2)] .K
[(m n) (m n 2).......(1or 2)]
where K =
otherwise1evenaren&mboth2/

Page : 35 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
A. Tangent : Limiting case of secant as B A(1) Any tangent can cut
the curve itself A
BB1
B2
y=f(x)
(2) A curve can have infinitenumber of point of tangency.
(3) If A curve has y = 0 as its tangent and inverse of that function exist then x = 0 willbe tangent of its inverse function.
(4) Equation of Tangent :
mT =
tan
dxdy
)y,x( 11
(x ,y )1 1
P
y=f(x)
)xx(myy 1T1 .......(1)
B. Normal : Normal is line ar to tangent passing through point of tangency.Equation of normal :
mN = – )y,x( 11
dydx
T
P(x ,y )1 1
N
)xx(myy 1N1 .......(2)
C. Some important things to remember :(1) P point must lie on the curve to apply above formulas (1) & (2)
(2) If 1 1(x , y )
dy 0dx
Tangent is parallel to x-axis (Horizontal tangent)
(3) If 1 1(x , y )
dydx
or 0dydx
)y,x( 11
tangent is parallel to y-axis (Vertical tangent)
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 36
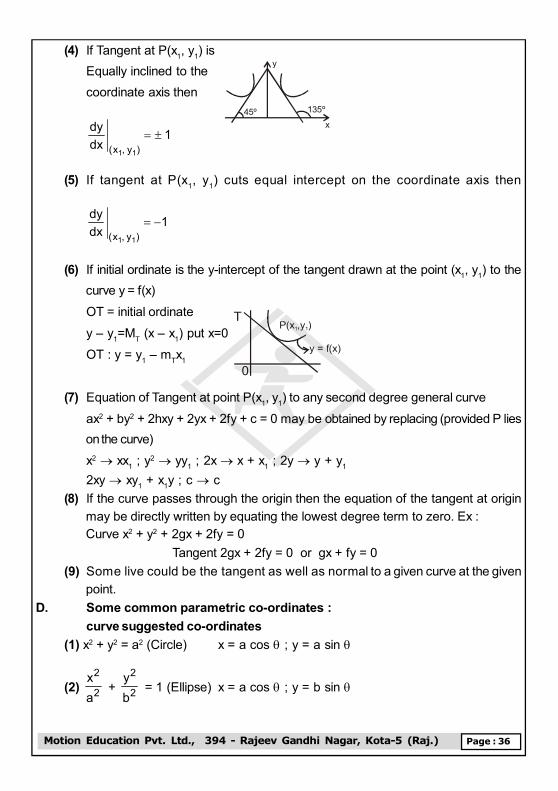
(4) If Tangent at P(x1, y1) isEqually inclined to thecoordinate axis then
135º45º
y
x1
dxdy
)y,x( 11
(5) If tangent at P(x1, y1) cuts equal intercept on the coordinate axis then
1dxdy
)y,x( 11
(6) If initial ordinate is the y-intercept of the tangent drawn at the point (x1, y1) to thecurve y = f(x)
OT = initial ordinate
y – y1=MT (x – x1) put x=0
0
TP(x ,y )1 1
y = f(x)OT : y = y1 – mTx1
(7) Equation of Tangent at point P(x1, y1) to any second degree general curve
ax2 + by2 + 2hxy + 2yx + 2fy + c = 0 may be obtained by replacing (provided P lieson the curve)
x2 xx1 ; y2 yy1 ; 2x x + x1 ; 2y y + y1
2xy xy1 + x1y ; c c(8) If the curve passes through the origin then the equation of the tangent at origin
may be directly written by equating the lowest degree term to zero. Ex :Curve x2 + y2 + 2gx + 2fy = 0
Tangent 2gx + 2fy = 0 or gx + fy = 0(9) Some live could be the tangent as well as normal to a given curve at the given
point.D. Some common parametric co-ordinates :
curve suggested co-ordinates(1) x2 + y2 = a2 (Circle) x = a cos ; y = a sin
(2) 2
2
ax
+ 2
2
by
= 1 (Ellipse) x = a cos ; y = b sin

Page : 37 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(3) x2 – y2 = a2 (Rect. Hyp.) x = a sec ; y = a tan
(4) x2/3 + y2/3 = a2/3 x = a cos3 ; y = a sin3
(5) x + y = a x = a cos4 ; y = a sin–1
(6) n
n
ax
+ n
n
ay
= 1 x = a cos2/n ; y = a sin2/n
(7) y2 = 4ax (parabola) x = at2 ; y = 2at(8) y2 = x3 x = t2 ; y = t3
E. Angle of Intersection of two curves :The angle of intersection of two curves at their point of intersection P is defined as theangle between the two tangents to the curves at P.Angle will always be acute.
)y,x(
22
)y,x(
11
1111dx
dym;dxdym
tan = 21
21mm1mm
y =g(x)2
y=f(x)
P(x ,y )1 1
m2m1
If m1 then tan = 2m
1
F. Isogonal curves : Two curves are set to be isogonal if angle of intersection is samewherever they intersect. Ex : sin x & cos x
G. Orthogonal curves : Two curves are set to be orthogonal if they intersect at 90ºwherever they intersect.
1dxdy.
dxdy
p
2
p
1 P
y1
y2
H. Vertical Tangent : y = f(x) is set to have a vertical tangent at x = a if both LHD andRHD at x = a is either approaching to + or –. but not both.
I . Length of tangent, normal, sub-tangent, sub-normal :
LT=2
1y 1 mm , m slope of tangent at point P(x1, y1)

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 38
LN = 2
1 m1y
90–
T N
LSNLST
G x
y
P(x ,y )1 1
LN
y = f(x)
LT y1
LST = my1
LSN = |y1 m|
J. Shortest distance between two non-intersecting curve : Shortest distance b/w
two non - intarsecting curve
is always along their common f(x)
P
Qg(m)
normal (wherever they cut)
PQ will be shortest distance.
A. Monotonic Function : Functions are said to be monotonic if they are either increasingor decreasing in their entire domain.Ex : f(x) = ex
B. Non-monotonic function : functions which are increasing as well as decreasing intheir domain are said to be non-monotonic.
C. Monotonicity of a function at a point :A function is said to be monotonic increasing at x = aIf f(a + h) > f(a) & f(a – h) < f(a) for small (+ve)hA function is said to be monotonic decreasing at x = a If f(a + h) < f(a) & f(a – h) > f(a)for shall (+ve)h
D. Monotonocity of a function in an interval :
(1) Function f(x) is said to be increasing in an interval (a, b) if dxdy
> 0 or f ’(x) > 0
(2) function f(x) is said to be decreasing is an interval (a, b) if dxdy
< o or f ’(x) < 0

Page : 39 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
we can talk of monotonocity of f(x) at x = a only when x = a lies in the domain offunction without any consideration of continuous & differentiable of f(x) at x = a.
(3) Non-Decreasing function :f ’(x) 0
a b
(4) Non-Increasing function :f ’(x) 0
a b
If f is increasing for x > a and x < a then if also said to be increasing at x = aprovided f(x) is continuous at x = a.
If the function is monotonic at x = a. If can’t have extremum points at x = a andvic-versa
(5) Stationary Point : Point in is the domain of f(x) where f ’(x) is equals to zero.(6) Critical Point : Points in the domain of f(x) where f ’(x) is equal to zero or f ’(x)
fails to exist. Due to any reason.
E. Greatest & lowest value of a function :
(1) If a constant function y = f(x) is strictly increasing is [a, b] then
Lowest value = f(a), Greatest value = f(b)
(2) If y = f(x) is stricty decreasing in [a, b] then
Lowest value = f(b), Greatest value = f(a)
F. Rolle’s Theorem : Let f(x) be a function of x satisfying following conditions.
(1) f(x) is continuous in [a, b]
(2) f(x) is differentiable in (a, b)
(3) f(a) = f(b)
Then there exist atleast one point x = c belongs to (a, b) such that f ’(c) = 0
G. Lagrange’s Mean Value theorem (LMVT) :
Let f(x) be a function at x satisfying the following.
(1) f(x) is continuous in [a, b]
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 40
(2) f(x) is differentiable in (a, b)
(3) There exist atleast one c (a, b) such that f ’(c) = ab
)a(f)b(f
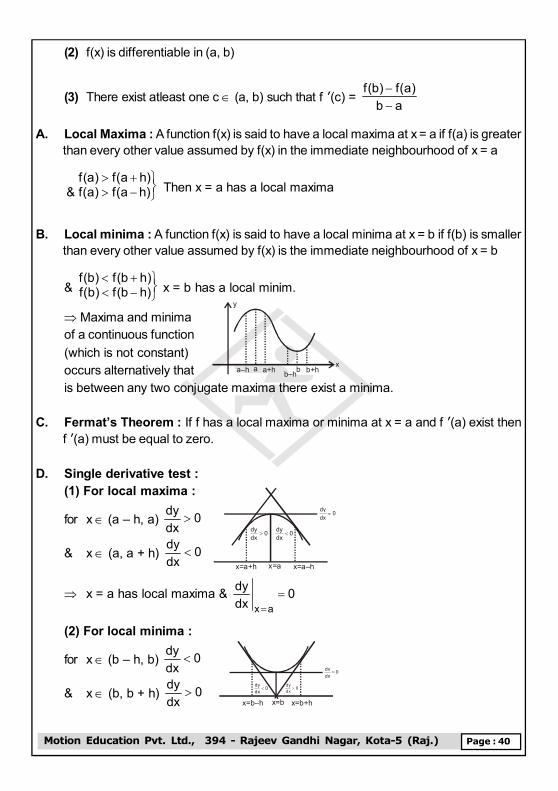
A. Local Maxima : A function f(x) is said to have a local maxima at x = a if f(a) is greaterthan every other value assumed by f(x) in the immediate neighbourhood of x = a
)ha(f)a(f&)ha(f)a(f
Then x = a has a local maxima
B. Local minima : A function f(x) is said to have a local minima at x = b if f(b) is smallerthan every other value assumed by f(x) is the immediate neighbourhood of x = b
&
)hb(f)b(f)hb(f)b(f
x = b has a local minim.
Maxima and minimaof a continuous function(which is not constant)
a–h a a+h b–hb b+hx
y
occurs alternatively thatis between any two conjugate maxima there exist a minima.
C. Fermat’s Theorem : If f has a local maxima or minima at x = a and f ’(a) exist thenf ’(a) must be equal to zero.
D. Single derivative test :(1) For local maxima :
for x (a – h, a) 0dxdy
& x (a, a + h) 0dxdy
0dxdy
0dxdy
0dxdy
x=a+h x=a–hx=a
x = a has local maxima & 0dxdy
ax
(2) For local minima :
for x (b – h, b) 0dxdy
& x (b, b + h) 0dxdy 0
dxdy
0dxdy
0dxdy
x=b–h x=b+hx=b

Page : 41 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
x = b has local minima & x b
dy 0dx
Remarks :(a) If f ’(a) = 0 and f ’(x) changes its sign from +ve to –ve while crossing over the point
x = a from left to right implies x = a has local maxima.(b) If f ’(b) = 0 and f ’(x) changes its sign from –ve to +ve while crossing over the point
x = b from left to right implies x = b has local minima(c) If f ’(c) = 0 and f ’(x) doesn’t change it sign while crossing over the point x = c from
left to right then f(x) is either strictly or through out
E. Double derivative test :(1) If f ’(a) = 0 & f ’’(a) < 0 x = a has local maxima(2) If f ’(b) = 0 & f ’’(b) > 0 x = b has local minima(3) If f ’(c) = 0 & f ’’(c) = 0 Then no comments
F. Geometrical Problems :(1) Volume of a cuboid = bh .(2) Surface area of a cuboid = 2 (b + bh + h) .(3) Volume of a prism = area of the base x height .(4) Lateral surface of a prism
= perimeter of the base x height .(5) Total surface of a prism
= lateral surface + 2 area of the baseRemark : lateral surfaces of a prism are all rectangles.
(6) Volume of a pyramid =13
area of the base x height.
(7) Curved surface of a pyramid
=12
(perimeter of the base) x slant height .
Remark : slant surfaces of a pyramid are triangles.
(8) Volume of a cone =13
r2h .

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 42
(9) Curved surface of a cylinder = 2 rh .(10) Total surface of a cylinder = 2 rh + 2 r2.
(11) Volume of a sphere =43 r3.
(12) Surface area of a sphere = 4 r2.
(13) Area of a circular sector =12
r2
(when is in radians)
G. Point of Inflection : A point where the graph of function is continuous and has thetangent line and where the concavity changes is called point of inflection.(1) At the point of inflection either y’’ = 0 and changes sign or y’’ fails to exist(2) At the point of inflection the tangent crosses its curve at that point(3) A function can’t have point of inflection & point of extremum at the same point(4) If f ’’(x) > 0 concave upwards
& f ’’(x) < 0 concave downwards
H. Different graphs of cubic polynomials :f(x) = ax3 + bx2 + cx + d (a > 0)
(1) If curve is monotonic f ’(x) 0 or 0 x R(2) If curve is non-monotonic
(a) Only one real root & x1 x2
two imaginary rootsf(x1) . f(x2) > 0
(b) Two coincidence x1 x2
& one distinct x1 x2
f(x1) . f(x2) = 0(c) All three distinct
real roots x1
x2
f(x1) . f(x2) < 0

Page : 43 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
A. Methods of finding Area :
(1) By taking vertical strips :
Case-1 If y = f(x) liescompletely above thex-axis y
(x,y) y=f(x)
a b
x
A=b b
a ay dx f(x) dx
Case-2 If y = f(x) liescompletely below the
x-axis A = b
ay dx
y
(x ,y )1 1
x=a x=b
x
Case-3 y = f(x) cuts thex-axis at x = c (a, b)
A=c
af(x) dx +
b
cf(x) dx
x=ac x=b
(2) By taking horizontal strips :
A = b
adyx x dx
(x,y)
x=f(y)y=b
y=ay
(3) Area enclosed between two curves :Case-1 By taking vertical strips
A = 2
1
x2 1x
(y y ) dx
y1 y2
y =g(x)1
y =f(x)2
x
dx
= 2
1
x
x[f(x) g(x)] dx
upper lower
Case-2 By taking Horizontal strips
A = 2
1
y2 1y
(x x ) dy = 2
1
y
y(f(y) g(y) dx
right one left one

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 44
(4) Standard Areas :(a) Area contained in y2 = 4ax & x2 = 4by (a, b > 0)
A = 3ab16
(b) y2 = 4ax & y = mx ; A = 3
2
m3a8
(c) Area enclosed by y2 = 4ax and its ordinates x = 2a
A=3
216 a2 =32
( ABCD) BC
D A
B. Shifting of origin : Area remains unchanged even if the coordinates axis are shifted.If y = f(x) is a monotonic function in (a, b) than the area bounded by the lines x = a,
x = b, y = f(x) & y = f(c), where c (a, b) in maximum when c = 2
ba , provided
f ’(c) 0
C. Average value of function : yavg =
b
af(x) dx
b a
A. An equation that involves independent, dependent variables and the derivatives ofdependent variable is called a differential equation
Ex. 2
2
dxyd
+ Kdxdy
+ Mx + Ny = 0
B. Order & Degree of differential equation :Order : The order of D.E. is the order of the highest differential coefficient occurring inthe equation.Degree : Degree of the highest order derivative occurring in the equation after it hasbeen expressed in a form, free from radicals and fractions.
C. Formation of differential equation :(1) Differentiate the given equation with respect to the independent variables as many
times as the number of arbitrary constants

Page : 45 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(2) Eliminate the arbitrary constant and the eliminant is the regd. D.E. order of the D.E. is exactly equal to the number of independent arbitrary constant
appearing in a given family.
D. Solving differential equation :
Elementary type of 1st Order & 1st Degree D.E.
Variable Separable Homogenous Linear D.E.
(1) Variable separable :Type-1 : Of the form f(x) dx + g(y) dy = 0
To solve directly integrate
cdy)y(gdx)x(f
Type-2 : Of the form dxdy
= f(ax + by + c), b 0
but ax + by + c = t
Type-3 : Of the form dxdy
= 222
111cybxacybxa
{if a2 + b1 = 0}
To solve simply cross multiply & note the perfect differential of ‘xy’ & integrate term byterm.Type-4 : Transformation to polar coordinates :(a) x = r cos ; y = r sin
x2 + y2 = r2 ; y/x = tan x dx + y dy = rdr ; xdy – ydx = r2 d{when question has appearens of x2 + y2}
(b) x = r sec ; y = r tan x2 – y2 = r2 ; y/x = sin xdx – ydy = rdr ; x dy – ydx = r2 sec d{when question has appearens of x2 – y2}

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 46
E. Homogeneous differential equation :
(1) An equation of the form dxdy
= )y,x()y,x(f
(where f(x, y) & (x, y) are homogeneous functions of same degree) To solve puty = t x or x = t y
(2) Equation reducible to homogeneous differential equation of the form
dxdy
= 222
111cybxacybxa
when a1b2 – a2b1 0 or 2
1aa
2
1bb
substitution : x = u + h and y = v + k
F. Linear differential equation : A diff. equation is said to be linear if the dependentvariable and all its differential coefficient occur in degree one only and are never mul-tiply together.General Appearance of LDE
a0 n
n
dxyd
+ a1 1n
1n
dxyd
+ a2 2n
2n
dxyd
+...+ an–1 dx
dy+ an y = (x)
where a0, a1, a2 ........... an & is the function of ‘x’ only, if a0(x) 0 then order of D.E.will be ‘n’ LDE is always of 1st degree. But converse is not true always.
G. Linear differential equation of first order :
dxdy
+ Py = Q where P & Q are function of ‘x’ (Independent variable)
To solve calculate
Integrating factor : (I.F.) = Pdxe
Solution : y (I.F.) = dx.)F.I(Q

Page : 47 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
H. Equation reducible to linear differential equation (Bernoulli’s equation) :
Of the form dxdy
+ Py = Q yn
To solve divide by yn and substitute y1–n = t then dxdt
+ (1 – n) Pt = Q(1 – n)
Now solve as 1st order LDE
I. Some important exact differentials :
(1) xdy + ydx = d(xy) (2) 2xydxxdy
= d
xy
(3) 2yydxxdy
= d
yx
(4) xyydxxdy
= xy)xy(d
= d(n xy)
(5) yxdydx
= d [n (x + y)] (6) xyydxxdy
= d[n (y/x)]
(7) 2 2xdx ydyx y
= 21
[n (x2 + y2)] (8) 22 yxydxxdy
= d (tan–1 y/x)
(9) 22yxydxxdy
= d
xy1
J. Isogonal & orthogonal trajectories :A family of curve (x, y, a) = 0 ..........(i)a arbitrary constantA curve making a fixed angle
with curves family (i) iscalled isogonal trajectories
of given curve and if = 2
,
(x,y,a)
then its called orthogonal
trajectories.

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 48
PART-II
TRIGONOMETRY
A. Three very important identities :(1) sin2 + cos2 = 1(2) 1 + tan2 = sec2 (3) 1 + cot2 = cosec2
B. Trigonometric ratios of compound angle :(1) sin (A + B) = sin A cos B + cos A sin B(2) sin (A – B) = sin A cos B – cos A sin B(3) cos (A + B) = cos A cos B – sin A sin B(4) cos (A – B) = cos A cos B + sin A sin B
C. Two very important identities :(1) sin(A + B) . sin(A – B) = sin2A – sin2B = cos2B – cos2A(2) cos(A + B) . cos(A – B) = cos2A – sin2B = cos2B – sin2A
D. Identities for converting product to sum :(1) 2 sin A cos B = sin(A + B) + sin(A – B)(2) 2 cos A sin B = sin(A + B) – sin(A – B)(3) 2 cos A cos B = cos(A + B) + cos(A – B)(4) 2 sin A sin B = cos(A – B) – cos(A + B)
E. Identities for converting sum to product :
(1) sin C + sin D = 2 sin
2
DC cos
2
DC
(2) sin C – sin D = 2 cos
2
DC sin
2
DC
(3) cos C + cos D = 2 cos
2
DC cos
2
DC
TRIGONOMETRIC RATIO & IDENTITIES
Page : 49 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(4) cos C – cos D = –2 sin
2DC
sin
2DC
= 2 sin
2DC
sin
2CD
F. Values of tan(A + B) & cot(A + B) :
(1) tan (A + B) = Btan.Atan1BtanAtan
(2) tan (A – B) = Btan.Atan1BtanAtan
(3) tan
A4 = Atan1
Atan1
(4) tan
A4 =
Atan1Atan1
(5) cot (A + B) = AcotBcot
1Bcot.Acot
(6) cot (A – B) = AcotBcot1Bcot.Acot
(7) tan (A + B + C ) = Ctan)BAtan(1Ctan)BAtan(
= Ctan
BtanAtan1BtanAtan1
CtanBtanAtan1BtanAtan
= Btan.Atan1AtanAtan
G. Trigonometric ratios of multiple and sub-multiple angles :
(1) sin 2A = 2 sin A cos A = Atan1
Atan22

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 50
(2) cos 2A = cos2A – sin2 A = 1 – 2 sin2 A
= 2 cos2A – 1 = Atan1Atan1
2
2
(3) sin 3A = 3 sin A – 4 sin3 A(4) cos 3A = 4 cos3A – 3 cos A
(5) tan 3A = Atan31
AtanAtan32
3
(6) cos 5A = 16 cos5A – 20 cos3A + 5 cos A(7) sin 5A = 16 sin5A – 20 sin3A + 5 sin A
H. Important deduction :
(1)A2sin
A2cos1=
AcosAsin2Acos2 2
= cot AA
(2)A2sin
A2cos1=
AcosAsin2Asin2 2
=tan A A
º5.22tanorº5.7tan
computetoused
becan
(3)A2cos1A2cos1
=Acos2Asin2
2
2 = tanan2 A
I. Useful to remember :
(1) sin 12
= sin 15º = 4
26 = cos 75º = cos 125
(2) sin 75º = sin 125
= 4
26 = cos 12
= cos 15º
(3) tan 15º = tan 12
= 2 – 3 = cot 75º = cot 125
(4) tan 75º = tan 125
= 2 + 3 = cot 15º = cot12

Page : 51 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(5) cot 7.5º = tan 82.5º = 3 1223
6432
(6) sin 18º = 4
15
(7) cos 36º = cos 5
= sin 54º = sin 103
= 4
15
J. Trigonometric identities in a triangle :If A + B + C = , then(1) sin 2A + sin 2B + sin 2C = 4 sin A sin B sin C
(2) 2/Asin41Acos
(3) sin2A + sin2B + sin2C = 2 + 2 cos A cos B cos C
(4) Atan = Atan
(5) 1Bcot.Acot
(6) 12Btan
2Atan
(7) 2Acot
2Acot
K. Inequalities :(1) In any ABC cot2A + cot2B + cot2C 1
(2) In any ABC cosA cos B cos C 81
(3) In any ABC 1 < cos A + cos B + cos C 23

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 52
L. Summation of Trigonometric series :
(1) sin + sin ( + ) + ...... + sin ( + (n – 1)) =
2)1n(sin.
2sin
2nsin
(2) cos + cos ( + ) + ...... + cos ( + (n – 1)) =
2)1n(cos.
2sin
2nsin
M. Maximum & Minimum values of trigonometric functions :(1) Min. value of a2 tan2 + b2 cot2 = 2ab
(2) Max and Min. value of acos+ bsin are 22 ba and – 22 ba
(3) If f() = acos() + bcos() where a, b, and are known quantitiesthen
– )cos(ab2ba 22 f() )cos(ab2ba 22
(4) If
2,0 and = (constant) then the maximum values of the
expression cos cos, cos + cos, sin + sin and sin sin occurswhen /2
(5) If
2,0 and = (constant) then the minimum values of the
expression sec + sec, tan + tan, cosec + cosec occurs when /2.
N. Graphs of six trigonometric functions :
(a) y = sin x, x R; y [–1, 1]
x
y = sin x1
–1
2/32/ 22 2/3
2/
Page : 53 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
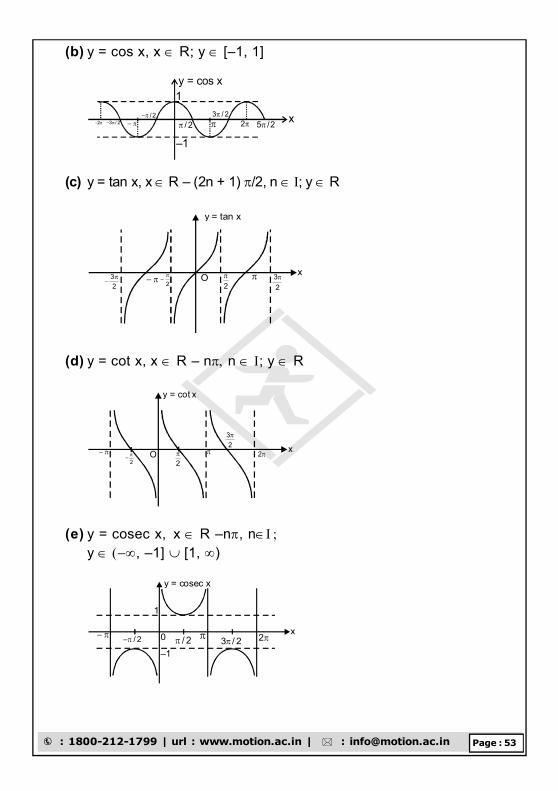
(b) y = cos x, x R; y [–1, 1]
x
y = cos x1
–1
2/32/ 22 2/3
2/2/5
(c) y = tan x, x R – (2n + 1) /2, n ; y R
y = tan x
xO2
23
23 2
(d) y = cot x, x R – n n ; y R
y = cot x
xO2
23
2 2
(e) y = cosec x, x R –n, ny , –1] [1, )
1
y = cosec x
2/0
–12/
2/3 2x
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 54
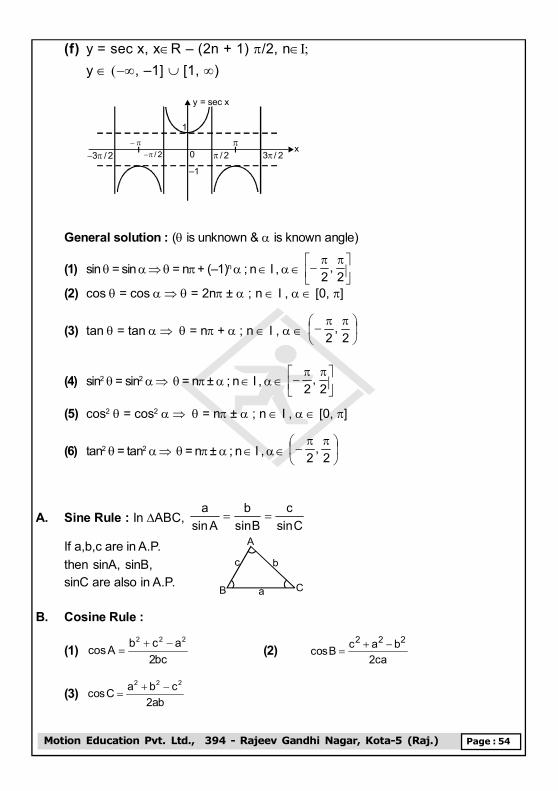
(f) y = sec x, xR – (2n + 1) /2, ny , –1] [1, )
1
y = sec x
0
–1
2/ 2/3x
2/
2/3
General solution : ( is unknown & is known angle)
(1) sin = sin = n + (–1)n ; n I ,
2,
2(2) cos = cos = 2n ± ; n I , [0, ]
(3) tan = tan = n + ; n I ,
2,
2
(4) sin2 = sin2 = n ± ; n I ,
2,
2
(5) cos2 = cos2 = n ± ; n I , [0, ]
(6) tan2 = tan2 = n ± ; n I ,
2,
2
A. Sine Rule : In ABC, a b c
sinA sinB sinC
If a,b,c are in A.P.then sinA, sinB,
A
B Ca
bc
sinC are also in A.P.
B. Cosine Rule :
(1)bc2
acbAcos222
(2)ca2
bacBcos222
(3)ab2
cbaCcos222

Page : 55 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
Remarks : Cosine Rule is useful if(a) Two sides & included angle are given in ABC(b) If all the three sides are given (when sides are relatively small)
C. Projection Rule :(1) a = b cos C + c cos B(2) b = c cos A + a cos C
A
B C
c b
aD
ccosB bcosC(3) c = a cos B + b cos A(4) a + b + c = (a + b) cos C + (b + c) cos A + (c + a) cos B
D. Tangent Rule (Napier's Analogy) :
(1)
2Ccot
baba
2B–Atan
(2)
2Acot
cbcb
2C–Btan
(3)
2Bcot
acac
2A–Ctan
Remark : Tangent rule is useful If two sides and Included angle is given, (even ifsides are large)
E. Area of the triangle :
(1) 1P.a21
a2P1
(2) 2P.b21
b2P2
A
B C
c
b
aD
FP2
E
P1
P3
(3) 3P.c21
c2P3
(P1 is perpendicular distance of BC from A and so on)Remark : If sides are in an A.P. P1, P2, P3 in H.P.
Csinab21 = Asinbc
21
= Bsinca21
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 56
F. Sine, Cosine and Tangent of half angle of ABC
Semi perimeter of ABC s = 2
cba
(1) bc)cs)(bs(
2Asin , ca
)as)(cs(2Bsin
ab)bs)(as(
2Csin
(2) bc)as(s
2Acos
, ca)bs(s
2Bcos ,
ab)cs(s
2Ccos
(3) )as(s2Atan
, )bs(s2
Btan
,
)cs(s2Ctan
where Area of Triangle )cs)(bs)(as(s
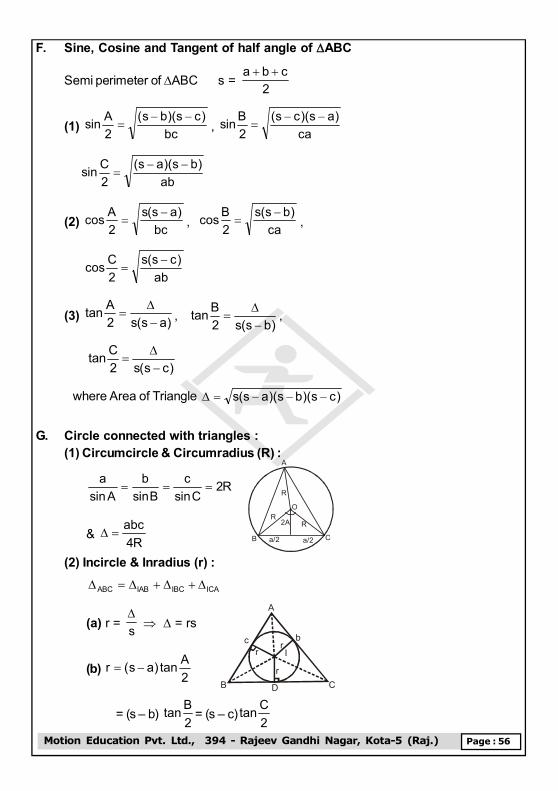
G. Circle connected with triangles :(1) Circumcircle & Circumradius (R) :
R2Csin
cBsin
bAsin
a
& R4
abc
A
B C
R
RO
R
a/2 a/2
2A
(2) Incircle & Inradius (r) :
ICAIBCIABABC
(a) r = s
= rs
(b) 2Atan)as(r
A
cr
B D C
b
r
rI
= (s – b) 2Btan = (s – c)
2Ctan
Page : 57 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
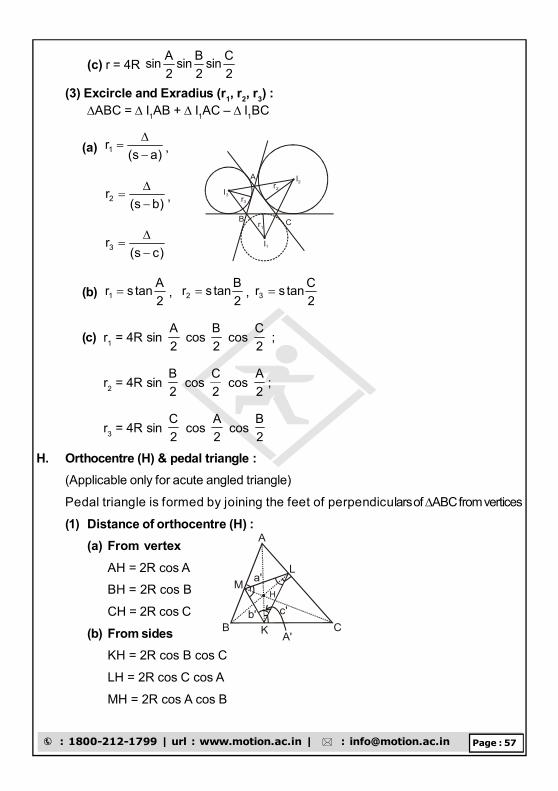
(c) r = 4R 2Csin
2Bsin
2Asin
(3) Excircle and Exradius (r1, r2, r3) :ABC = I1AB + I1AC – I1BC
(a) )as(r1
,
)bs(r2
, I3
A I2
r1
I1
B C
r3
r2
)cs(r3
(b)2Atansr1 ,
2Btansr2 ,
2Ctansr3
(c) r1 = 4R sin 2A
cos 2B
cos 2C
;
r2 = 4R sin 2B
cos 2C
cos 2A
;
r3 = 4R sin 2C
cos 2A
cos 2B
H. Orthocentre (H) & pedal triangle :(Applicable only for acute angled triangle)
Pedal triangle is formed by joining the feet of perpendiculars of ABC from vertices
(1) Distance of orthocentre (H) :(a) From vertex
AH = 2R cos A
BH = 2R cos B
K
ML
A
B CA'
c'b'
a'H
CH = 2R cos C
(b) From sidesKH = 2R cos B cos C
LH = 2R cos C cos A
MH = 2R cos A cos B

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 58
(2) Side length of pedal triangle :ML = a’ = R sin 2A
MK = b’ = R sin 2B
KL = c’ = R sin 2C
(3) Angles of pedal KLM :K = A’ = 180º – 2A
L = B’ = 180º – 2B
M = C’ = 180º – 2C
(4) Sine rule in pedal triangle :
A2sin'a
= B2sin'b
= C2sin'c
= 2R’
R = 2R’ R’ = 2R
R’ is circum radius of pedal triangle.
V. Imp. Note :- Orthocentre of ABC is the Incentre of It’s pedal KLM
(5) Excentre & Excentric I1 I2 I3 :I1, I2, I3 are excentres(a) Orthocentre of I1 I2 I3
is the incentre of ABC & I
I1
I2I3
B
A
C(b) ABC is pedal triangle
of I1 I2 I3I. Length of angle bisector :
ABD + ADC = ABC
AD = 1 = cb
2Acosbc2
BE= 2 = ac2Bcosca2
A
B CD
I
a
Eb
Fc
CF = 3 = ba2Ccosab2

Page : 59 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
J. Length of median :
A = 21 222 ac2b2
B = 21 222 ba2c2
A
B CD
A
C = 21 222 cb2a2
& )cba(43 2222
C2B
2A
K. M–N Theorem :(1) (m + n) cot
= m cot – n cot
A
B C
c b
D
mk nka
(2) (m + n) cot
= n cot B – m cot C
L. Ambiguous case of SOT : A unique triangle exists if
(1) Three sides are given (b + c > a) etc.
(2) Two sides and one included angle are given.
Remark :- If two sides and angle opposite to one of these sides are given say (a, b, A)then
Condition(a) a < b sin A no triangle exist
(b) a = b sin A right angle triangle at B
(c) b > a > b sin A & A is acute two triangles
(d) a > b & A is acute angle one triangle

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 60
PART-III
ALGEBRAA. Logarithm :
xNlogNa
a
x
1a0a0N
(1) Unity has been excluded from the base of logarithm.(2) Na Nloga is an identity for all N > 0, a > 0 & a 1(3) logN N = 1(4) log1/N N = –1(5) loga 1 = 0.(6) When ever the number & the base are on the same side of unity then logarithm
of that number on that base is (+ ve) however if the number & the base arelocated on different side of unity then logarithm of that number on that base is –ve.
B. Principle properties of logarithm : If m, n are arbitrary +ve no. where a > 0 & a 1 & x is any real number then(1) loga(mn) = logam + logan(2) loga(m/n) = logam – logan(3) logamx = x logam
(4)Base changing theorem : logba = blogalog
c
c ; logba = blog
1a
; logba . logcb .
logdc = logda
(5) alogclog bb ca
C. Common and natural logarithm : log10N is referred as a common logarithmand logeN is called as natural logarithm of N to the base Napierian and is popularlywritten as n N. Note that e is an irrational quantity lying between 2.7 to 2.8 Note thaten x = x.
D. Characteristic & Mantissa : The common logarithm of a number consists of twoparts, integral and fractional, of which the integral part may be zero or an integer(+ve or –ve) and the fractional part a decimal, less than one and always positive.The integral part is called the characteristic and the decimal part is called the mantissa.It should be noted that, if the characteristic of the logarithm of N is p thennumber of significant digit in N = p + 1 if p is the non negative characteristic oflog N.Number of zeros after decimal before a significant figure start is p – 1
Page : 61 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
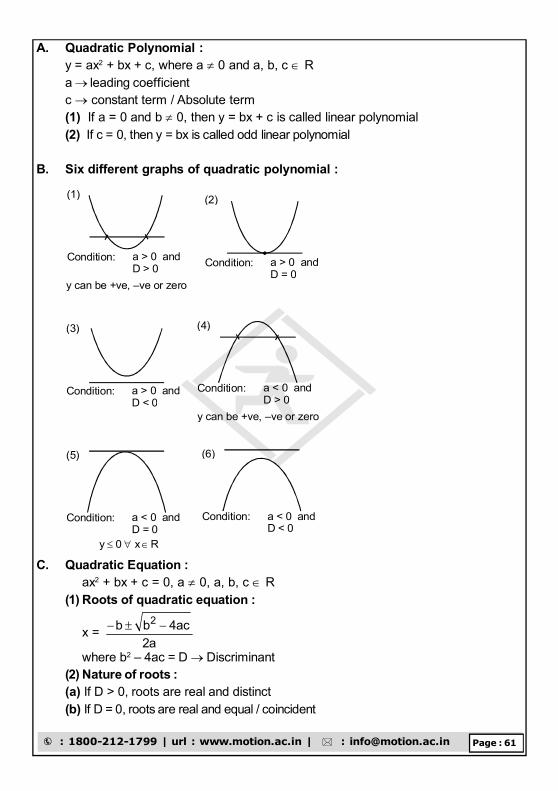
A. Quadratic Polynomial :y = ax2 + bx + c, where a 0 and a, b, c Ra leading coefficientc constant term / Absolute term(1) If a = 0 and b 0, then y = bx + c is called linear polynomial(2) If c = 0, then y = bx is called odd linear polynomial
B. Six different graphs of quadratic polynomial :
Condition: a > 0 andD > 0
(1)
y can be +ve, –ve or zero
Condition: a > 0 andD = 0
(2)
Condition: a > 0 andD < 0
(3)
Condition: a < 0 andD > 0
(4)
y can be +ve, –ve or zero
Condition: a < 0 andD = 0
(5)
Rx0y
Condition: a < 0 andD < 0
(6)
C. Quadratic Equation :ax2 + bx + c = 0, a 0, a, b, c R
(1) Roots of quadratic equation :
x = a2
ac4bb 2
where b2 – 4ac = D Discriminant(2) Nature of roots :(a) If D > 0, roots are real and distinct(b) If D = 0, roots are real and equal / coincident

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 62
(c) If D < 0, roots are imaginary(d) condition for real roots is D 0(e)(i) If coefficients of quadratic equation are rational and D is perfect square, the
roots are also rational and distinct(ii) If D is not a perfect square, then roots are irrational(iii) Irrational roots always occur in conjugate pairs (provided coeff. are rational)
= p + q , = p – q(iv) Complex roots always occur in conjugate pairs (real coeff.)
= a + ib , = a – ib, where i = 1
(3) If ax2 + bx + c = 0 then sum of the roots + =ab
, product of roots =ac
Important note for quadratic equation :ax2 + bx + c = 0
(i) Exactly one root of Quadratic equation is zero if c = 0, b 0(ii) Both roots of Q.E. are zero if c = 0, b = 0 and a 0(iii) If one root of Q.E. is then a = 0 and b 0.(iv) If both roots of Q.E. are at , then a = 0, b = 0 & c 0.(v) If a = b = c = 0, the Q.E. becomes an identity or if Q.E. is satisfied by more than
2 real values of x then it becomes an identity (i.e. it is satisfied by all real valuesof x).
(4) Condition of common root :(a) a1x2 + b1x + c1 = 0 and a2x2 + b2x + c2 = 0 have a common root , then
1221
2
cbcb
= 2112 caca
=
1221 baba1
(b) If both roots of above equations are common then 2
1aa
= 2
1bb
= 2
1cc
D. Maximum-Minimum value of quadratic polynomial:Maximum/Minimum value occurs at the vertex of the parabola as shown
bx cordinate of vertex2a
Dy coordinate of vertex4a
(x, y)Vertex

Page : 63 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(1) Condition to resolve a general 2 degree equation in 2 variables in twolinear factors :ax2 + 2hxy + by2 + 2gx + 2fy + c = 0 is a general 2 degree curve then the condition is
abc + 2fgh – af2 – bg2 – ch2 = 0 or cfgfbhgha
= 0
(2) Theory of equations :(a) If , , are roots of a cubic equation ax3 + bx2 + cx + d = 0 then
(i) ++ = ab
(ii) ++= =ac
(iii) .. = ad
(b) If ,,, are roots of Bi-quadratic equation ax4 + bx3 + cx2 + dx + e = 0, then
(i) +++ =ab
(ii)ac
(iii)ad (iv) ... = =
ae
(c) These formulas can be extended further for higher degree equations also.
E. Location of roots :Note :- Conditions are written, only for leading coefficient of quad. equation positive(i.e. a > 0).(1) Both roots of quad. equation are greater than a specified number ‘d’
Necessary and sufficient conditions are
(a) D 0
d
(b) a2b
> d
d(c) f(d) > 0
(2) Roots lie on either side of a fixed number ‘d’.Necessary and sufficient condition :

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 64
(a) f(d) < 0 d
(3) Exactly one root lies in interval (d, e), conditions are :
(a) f(d) . f(e) < 0 e dd e
Remark : Check values for end points also if given interval [d, e], then for f(d) = 0 orf(e) = 0, no other root should lie in (d, e)(4)Both roots are confined between d and e
(d < e) necessary and sufficient conditions are :
(a) D 0 (b) d < a2b
< e
d de e(c) f(d) > 0 (d) f(e) > 0(5) One root of quadratic is less than ‘d’ and other is greater than
‘e’ (d < e) Necessary and sufficient conditions are :(a) f(d) < 0(b) f(e) < 0. d e
A sequence is a set of terms which may be algebraic, real numbers, writtenaccording to definite rule and the series thus formed is called a progressione.g. 0, 1, 7, 26 .................... (Rule is n3 – 1)
1, 4, 7, 10 ....................2, 4, 6, 8 ..................... etc
Remark : Minimum number of terms in a sequence should be 3.
A.P. G.P. H.P. A.G.P. Miscellaneous
Common Sequences
A. Arithmetic Progression (AP) : Difference between any two consecutive terms isconstant.If first term = a, common difference = dThen the standard appearance of an AP. isa, (a + d), (a + 2d), (a + 3d) ...............
(1) General term of an AP : d)1n(aTn

Page : 65 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
If d > 0 Increasing APIf d < 0 decreasing APIf d = 0 constant AP i.e. all the terms remain same
(2) Sum of n terms of an AP :
]a[2nSor]d)1n(a2[
2nS nn
where = a + (n – 1) d ; Last term of given AP(a) If Sn Sum of n term
Sn – 1 Sum of (n–1) term
1nnn SST
(b) If a, b, c are in AP cab2
(3) Insert n AM’s between two given numbers a & bIf A1, A2, A3 ,.......... An are n AM’s between a & bthen a, A1, A2, A3 .......... An, b form an AP
total no. of terms = n + 2, = b & d = 1nab
A1 = a + d, A2 = a + 2d ... An = a + nd or An = b – d
(a) nAAn
1rr
where A = 2
ba ;
Single AM between a & b(b) In between two numbers
S'AM'nofsumS'AM'mofsum
= nm
(4) Supposition of terms in A.P. :(a) If no. of terms are odd
Three terms : a – d, a, a + dFive terms : a – 2d, a – d, a, a + d, a + 2d
(b) If no. of terms are evenfour terms : a – 3d, a – d, a + d, a + 3dsix terms :a – 5d, a – 3d, a – d, a + d, a + 3d, a + 5d
(c) If a1, a2, a3, a4, ............. are in APb1, b2, b3, b4, ............. are in APThen a1 + b1, a2 + b2, a3 + b3 ...... are in AP

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 66
B. Some standard results :
(1)
n
1rr
n
1rr
n
1rrr ba)ba(
(2)
n
1rr
n
1rr akKa
(3)
n
1rnkk where k constant
(4) Sum of first n natural number = n = 2
)1n(n
(5) Sum of first n odd natural number
= 2n)1n2((6) Sum of first n even natural number
= )1n(n)n2(
(7) Sum of the squares of first n natural numbers
=
6)1n2)(1n(nn2
(8) Sum of the cubes of first n natural number
=
23
2)1n(nn
C. Geometric Progression (GP) :Ratio of any two consecutive terms is constantIf first term = a, common ratio = rGeneral form of a GP a, ar, ar2 ,............
(1) General term of a G.P. : 1nn arT
(2) Sum of n terms of a G.P. :
1rwherenaS
1rwhere1r
)1r(aS
n
n
n
(3) Sum of an Infinite G.P. :
1|r|wherer1
aS
Remark : If a, b, c are in GP acb2

Page : 67 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(4) Insert n GM’s between two given positive numbersIf G1, G2, G3 .......Gn are n ‘GM’s between a and bthen a, G1, G2, G3 ....... Gn, b forms a G.P.
Remark : GM is only defined for positive real numbers. 1n1
abr
(a) G1 = ar, G2 = ar2 .......... Gn = arn or Gn = rb
(b) nn
1rr )G(G
where G = ab ;
Single GM between a & b
(5) Supposition of Terms in GP :(a) If no. of terms are odd.
Three terms : ra
, a, ar
Five terms : 2ra
, ra
, a, ar, ar2
(b) If no. of terms are evenFour terms : preferably assume as a, ar, ar2, ar3
Remark : If we assume four terms as 3ra
, ra
, ar, ar3 then in this case common ratio
is positive but common ratio can be negative also.(c) If a1, a2, a3 ........ GP
b1, b2, b3 ........ GPThen a1 b1 , a2 b2 , a3 b3 .... are also in G.P.
D. Arithmetic - Geometric Progression (AGP) :If every term of a series is multiplication of a consecutive term of an AP and GPthen that series is called AGPa, (a + d)r, (a + 2d) r2 ............Tn = [a + (n – 1)d] rn – 1
Remark : There is no such formula for calculating sum of AGP
E. Harmonic Progression (HP) : A sequence is said to be in H.P. if the reciprocals of itsterms are in A.P.
If a1, a2, a3 ... are in H.P. then 1a1
,2a1
,3a1
... are in APAP

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 68
A standard H.P. a1
, da
1
, d2a
1
,.........
Remark : There is no general formula for finding the sum of n terms of HP
(1) If a, b, c are in HP then a1
,b1
,c1
are in APAP
b2
=a1
+c1
b =ca
ac2
(2) Insert n. H.M’s between two given numbers a & b : If H1, H2 ........... Hn are nHM’s between a and b then a, H1, H2 ......... Hn , b are in HP
n
1i iH1
ab2)ba(n =
Hn
;
where H is single HM between a & b
F. Relation between A.M., G.M. & H.M. of two positive real numbers a & b :Two numbers a and b then A A.M. ; G G.M.;
H H.M. AHG2
Remark : For any given n positive real numbers a1, a2, a3 ................ an
RMS AM GM HM where
RMS (root mean square) = 2 2 2 21 2 3 na a a ... a
n
AM (arithmetic mean) = na........aaa n321
GM (geometric mean) = n/1n321 a........aaa
HM (harmonic mean) =
1 2 3 n
n1 1 1 1....a a a a
A. Fundamental Principle of counting :If an event can occur in ‘m’ different ways, following which another event can occur in ‘n’different ways, then total number of ways of simultaneous occurrence of both events indefinite order is = m × n (can be extended to any no. of events)

Page : 69 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
B. What’s Permutation & Combination ?(1) Permutation :
* Arrangement of things taken some or all at a time.* Order of occurrence of events is important.
(2) Combination :* Collection or selection of things taken some or all at a time.* Order of occurrence of events in not important
Remark : All GOD made things in general are treated to be different and all manmade things are to be spelled whether like or different
C. Factorial :(1) n ! = n = product of 1st ‘n’ natural numbers
n ! = 1 × 2 × .......... × n
(2) (n – 1)! = n!n
1!0
(3) factorial of negative numbers is not defined.
D. Useful Theorems :T-1 : Number of permutations of ‘n’ distinct things taken r’ at a time (0 r n)
npr = p(n, r) = nrA = !)rn(
!n
T-2 : Numbers of combinations/selections of ‘n’ distinct things taken ‘r’ at a time(0 r n)
ncr = c(n, r) =
rn = !)rn(!r
!n
Remark : Derived Identities(1) ncr + ncr – 1 = n + 1cr
(2) ncr = ncn – r
(3) If ncx = ncy x = y or x + y = 0(4) npr = r ! . ncr
(5) (2n)! = 2n.n! {1.3.5........(2n – 1)}
E. Formation of groups :(1) Number of ways of dividing (m + n) different things in two groups having ‘m’ and ‘n’
things are : !n!m!)nm(
; (m n)
(a) If m = n, then number of groups = !2!n!n!)n2(

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 70
(b) If ‘2n’ things are to be equally distributed among 2 persons then, no. of ways =
!2!n!n!)n2(
× 2!
(2) Similraly by (m + n + p) different things can be divided into 3 unequal groups is
!p!n!m!)pnm(
(a) If all groups are equal then number of ways = !3.)!n(
!)n3(3
(b) If ‘3n’ things are to be equally distributed among 3 persons then, number of ways
= !3.)!n(
!)n3(3 × 3!
Remark : This can be extended to any number of groups.
F. Permutation of alike objects : Number of permutation of ‘n’ things taken all at atime out of which(1) ‘p’ are similar and of one kind(2) ‘q’ are similar and of second kind
(3) and rest ‘r’ are all different =
timesr
.!.........1!1!q!p!n
Remark : Be careful if you encounter the following language used in problems Number of other ways Number of ways of rearranging If as many more words as possible
G. Circular permutation :(1) Number of circular permutations of ‘n’ different things taken ‘r’ at a time = ncr (r – 1)!(2) If clockwise & Anti-clockwise arrangements are considered as same then, ncr
2!)1r(
(3)Number of circular permutations of ‘n’ things out of which ‘p’ are alike and
rest are different = !p!)1n(
H. Total number of combinations :(1) Number of ways of selecting at least one thing out of ‘n’ different things is
= nc1 + nc2 +.............+ ncn = 2n – 1

Page : 71 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(2) Number of ways of selecting at least one thing out of (p + q + r +..........) things inwhich p are alike of one kind, q of second kind & so on is= (p + 1) (q + 1) (r + 1) ........... –1
I. Number of ways in which N can be resolved as a product of 2 divisors :(1) N = pa . qb ...........p & q are prime
=
1 (a 1) (b 1) .... if 'N' is not a perfect square2
(a 1)(b 1)... 1 if 'N' is a perfect square2
(2) Number of ways in which ‘N’ can be resolved as a product of 2 divisors whichare relatively prime = 2n–1 ,where n number of primes involved in prime factorization of N.
J. Maximizing ncr : ncr is maximum if
oddisnif,2
1nor2
1nr
evenisnif,2nr
K. Dearrangement : Number of ways in which ‘n’ letters can be placed in ‘n’ directedenvelopes so that no letter goes into its own envelope is
= n!
!n1)1(.........
!41
!31
!21 n
L. Distribution of alike objects :(1) Number of ways of distributing ‘n’ identical things to ‘p’ persons where each per-
son can receive one, none or more things is = n + p – 1Cp – 1(2) Number of ways of distributing ‘n’ identical things to ‘p’ persons where each per-
son should receive at least one object is = n – 1Cp – 1
M. Grid Problem :
n-rows
m-coloumnsA
B
Number of ways of reaching B,
starting from point A are = !n!m!)nm(
.

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 72
A. Binomial Theorem :(x + y)n = nC0 xn + nC1 xn – 1 y + nC2 xn – 2 y2 +...+ nCn yn ...(1)where x, y R & n N,general term of (x + y)n is (r + 1)th term
Tr + 1 = nCr xn – r yr, (x + y)n = rn
0r
rnr
n yxC
B. Highlights of (x + y)n :(1) No. of terms in the expansion are (n + 1).
No. of terms in the expansion of (x1 + x2 +...+ xk)n are n + k – 1Ck – 1
(2) Sum of the indices of ‘x’ & ‘y’ in each term in the exp. of (x + y)n is n(3) Binomial coeff. of the terms in equation (1) from the beginning and end are equal.
nC0 = nCn , nC1 = nCn – 1 , nCr = nCn – r
(4) Replace x from 1 and y from x in equation (1)(1 + x)n = C0 + C1x + C2x2 + ..... + Cnxn ......(2)
General term is Tr + 1 = nCr xr , (1 + x)n =
n
0r
rr
n xC
Replace x from (–x) in equation (2)(1 – x)n = C0 – C1x + C2x2 – C3x3 +....+ Cn(–x)n
General term is Tr + 1 = Cr (–x)n, (1 – x)n = nn
0rr
n )x(C
x
(5)1r
r
C
C
nn
=
r1rn
(6) n+1Cr+1 = )1r()1n(
nCr = r)1r(n)1n(
n–1Cr–1
C. Middle term : In the expansion of (x + y)n
Case-I If n is even then middle term is
1
2nT
Case-II If n is odd the two middle terms are
21nT &
23nT

Page : 73 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
D. Properties of binomial coefficients :In the exp. of (1 + x)n
(1) C0 + C1 + C2 +......+ Cn = 2n
(2) C0 + C2 + C4 + ...... = C1 + C3 + C5 +......= 2n–1
(3) C02 + C1
2 + C22 +............+ Cn
2 = 2nCn = !n!n!)n2(
(4) C0C1 + C1C2 + C2C3 +......+ Cn–1 Cn = 2nCn–1 = 2nCn+1
(5) 1.C1 + 2.C2 + 3C3 +.........+ n.Cn = n.2n–1
Remark : (2n) ! = 2n . n! (1.3.5 .......... (2n – 1))
E. Numerically greatest term In the expension (x + y)n
If Tr + 1 is numerically greatest term
r
1rT
T 1 & 2r
1rTT
1 1
yx
1n
–1 r
1yx
1n
Remark : If 1
yx
1n
is an integer then equality hold.
F. Very Important :
If nBA = I + f ; I, n N, 0 < f < 1
nBA = f ’ If A – B > 1
0 < f ’ < 1 f + f ’ = 1 I is odd integer
G. Binomial theorem for negative or fractional indices
(1) (1 + x)n = 1 + nx + !2)1n(n
x2 + !3)2n()1n(n x3 +...
valid only when | x | < 1
general term Tr + 1 = n(n 1)(n 2)....(n r 1)
r!
xr
(2) (1 – x)–n = 1 + nx + !2)1n(n x2 + n(n 1)(n 3)
3! x3 +..

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 74
Remark : sum important expression(a) (1 + x)–1 = 1 – x + x2 – x3 +..........(b) (1 – x)–1 = 1 + x + x2 + x3 +..........(c) (1 + x)–2 = 1 – 2x + 3x2 – 4x3 +..........(d) (1 – x)–2 = 1 + 2x + 3x2 + 4x3 +..........
(3) Approximation :- If x is so small then second & higher degree of x may beneglected.(1 + x)n = 1 + nx if x is so small
(4) coeff of xr in the exp (1 – x)–n , n N is
n(n 1)(n 2)...(n r 1)r!
= n + r – 1cr = n + r – 1cn–1
H. Exponential & logarithmic series :
(1) ex = 1 + x + !2x2
+ !3x3
+...
(2) log (1 + x) = x –2x2
+3x3
–4x4
+.. where –1 < x < 1
A. Definitions :(1) Trial and Event : an experiment is called a trial if it results in anyone of the
possible outcomes and all the possible out comes are called events.i.e. Tossing of a fair coin is a trial and turning up head or tail are events.
(2) Exhaustive Events : Total possible outcomes of an experiment are called itsexhaustive events.i.e. Throwing of a die has 6 exhaustive cases because any one of six digits 1, 2,3, 4, 5, 6 may come upward.
(3) Favourable Events : Those outcomes of a trial in which a given event may happenare called favourable cases for that event. i.e. If a dice is thrown then favourablecase for getting 1 or 2 or 3 or 4 or 5 or 6, is 1.
(4) Equally Iikely Events : Two or more events are said to be equally likely events ifthey have same number of favourable cases.i.e. In throwing of a dice, getting 1 or 2 or 3 or 4 or 5 or 6 are six equally likelyevents.
(5) Mutually Exclusive or Disjoint Events : Two or more events are said to be mutuallyexclusive, if the occurrence of one prevents or precludes the occurrence of theothers. In other words they cannot occur together.i.e. In throwing of a dice, getting 1 or 2 or 3 or 4 or 5 or 6 are six mutually exclusiveevents.

Page : 75 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(6)Simple and Compound Events : If in any experiment only one event can happenat a time then it is called a simple event. If two or more events happen togetherthen they constitute a compound event.i.e. If we draw a card from a well shuffled pack of cards, then getting a queen ofspade is a simple event and if two coins A and B are tossed together thengetting 'H' from A and 'T' from B is a compound event.
(7) Independent and Dependent Events : Two or more events are said to beindependent if happening of one does not affect other events. On the other handif happening of one event affects (partially or totally) other event, then they aresaid to be depending events.Remark : Generally students find themselves in problem to distinguish betweenindependent and mutually exclusive events and get confused. These events havethe following differences(a) Independent events are always taken from different experiment, while mu-
tually exclusive events are from only one experiment.(b) Independent events can happen together but in mutually exclusive events one
event may happen at one time.(c) Independent events are represented by the word "and" but mutually exclusive
events are represented by the word "or"(8) Sample Space : The set of all possible outcomes of a trial is called its sample,
space. It is generally denoted by S and each outcome of the trial is said to be apoint of sample of S.i.e. (a) If a dice is thrown once, then its, sample
space S = {1, 2, 3, 4, 5, 6} (b) If two coins are tossed together then its
sample space S = {HT, TH, HH, TT}
B. Mathematical definition of Probability :Let there are n exhaustive, mutually exclusive and equally likely cases for an event Aand m of those are favourable to it, then probability of happening of the event A isdefined by the ratio m/n which is denoted by P(A). Thus
P(A) = nm
= No. of favourable cases to ANo of exhaustive cases to A
Further, if A denotes negative of A i.e. event that A doesn't happen, then for above
cases m, n ; we shall have P( A ) = n
mn = 1 –
nm
= 1 – P(A)
P(A) + P( A ) = 1 & always 0 P(A) 1

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 76
C. Odds for an event :If an event A happens in m number of cases and if total number of exhaustive casesare n then we can say that the probability of event A,
P(A) = nm
and P( A ) = 1 – nm
= n
mn
odds in favour of A = P(A)P(A) = n/)mn(
n/m =
mnm
odds in against of A = )A(P)A(P
=n/m
n/)mn( =
mmn
D. Addition theorem of Probability :(1) When events are mutually exclusive :
If A and B are mutually exclusive events thenn (A B) = 0 P (A B) = 0 P(A B) = P(A) + P(B)
(2) When events are not mutually exclusive :If A & B are two events which are not mutually exclusive then P(A B) = P(A) + P (B)– P(A B)
or P(A + B) = P(A) + P(B) – P (AB)
E. Multiplication theorem of Probability :(1) When events are independent :
P(A/B) = P(A) and P(B/A) = P(B), thenP(A B) = P(A) . P(B) or P(AB) = P(A) . P(B)
(2) When events are not independent :P(A B) = P(A) . P(B/A) or P(B) . P(A/B)
orP(AB) = P(A) . P(B/A) or P(B) . P(A/B)
F. Probability of at least one of the n independent Events : If p1, p2, p3, ... pn arethe probabilities of n independent evens A1, A2, A3, ... An, then the probability ofhappening of at least one of these event is1 – [(1 – p1) (1 – p2) ... (1 – pn)]
P (A1 + A2 + A3 + ... + An) = 1 – P( 1A ) P ( 2A ) P( 3A ) ... P( nA )
Page : 77 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
G. Conditional Probability : If A and B are dependent events. Then the probability ofB when A has happened is called conditional probability of B with respect to A and it
is denoted by P(B/A). It may be seen that P
AB
= )A(P)AB(P
H. Binomial distribution for repeated trials :Let an experiment is repeated n times and probability of happening of any event calledsuccess is p and not happening the event called failure is q = 1 – p then by binomialtheorem(q + p)n = qn + nC1 qn–1 p + ... + nC1 qn–r pr + ... + pn
Now probability of(1) Occurrence of the event exactly r times = nCr qn–r pr
(2) Occurrence of the event at least r time = nCr qn–r pr + ... + pn
(3) occurrence of the event at the most r times = qn + nC1 qn–1 p + ... + nCr qn–r pr
I. Some important results :(1) Let A and B be two events, then
(a) P(A) + P( A ) = 1
(b) P(A + B) = 1 – P ( A B )
(c) P(A/B) = )B(P)AB(P
(d) P(A + B) = P(AB) + P( A B) + P(A B )(e) A B P(A) P(B)
(f) P( A B) = P(B) – P(AB)(g) P(AB) P(A) P (B) P(A + B) P(A) + P(B)(h) P(AB) = P(A) + P(B) – P(A + B)
(i) P(Exactly one event) = P (A B ) + P( A B)
(j) P( A + B ) = 1 – P (AB)= P(A) + P(B) – 2P (AB) = P(A + B) – P(AB)
(k) P (neither A nor B) = P ( A B ) = 1 – P (A + B)(2) Number of exhaustive cases of tossing n coins simultaneously (or of tossing a
coin n times) = 2n
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 78
(3) Number of exhaustive cases of throwing n dice simultaneously (or throwing one dicen times) = 6n.
(4) Playing cards(a) Total : 52 (26 red, 26 black)(b) Four suits : Heart, Diamond, Spade, Club - 13
cards each(c) Court Cards : 12 (4 Kings, 4 queens, 4 jacks)(d) Honour Cards : 16 (4 aces, 4 kings, 4 queens,
4 jacks)(5) Probability regarding n letters and their envelopes if n letters corresponding to
n envelopes are placed in the envelopes at random, then
(a) Probability that all letters are in right envelopes = !n1
(b) Probability that all letters are not in right envelopes = 1 – !n1
(c) Probability that no letter is in right envelopes = !21
– !31
+ !41
– ... + (– 1)n !n1
(d) Probability that exactly r letters are in right envelopes
= !r1
n r1 1 1 1.... ( 1)
2! 3! 4! (n r)!
A. Order of matrix : A matrix which has m rows and n columns is called a matrix oforder m × n.
B. Types of matrices :(1) Row Matrix : If in a matrix, there is only one row, then its is called a Row Matrix.
Thus A = [aij]m × n is a Row Matrix if m = 1(2) Column Matrix : If in a matrix there is only one column, then it is called a Column
Matrix.Thus A = [aij]m × n is a Column Matrix if n = 1
(3) Square Matrix : If number of rows and number of column in a matrix are equal,then it is called a square matrix.
Thus A = [Aij]m × n is a Square Matrix if m = n(4) Trace of Matrix : The sum of diagonal elements of a square Matrix. 'A' is called
the Trace of Matrix A which is denoted by tr A.
tr A =
n
1iija = a111 + a22 +..............+ ann

Page : 79 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(5) Singleton Matrix : If in a matrix there is only one element then it is called SingletonMatrix.
(6)Null or Zero Matrix : If in a matrix all the elements are zero then it is calleda zero matrix and it is generally denoted by 0. Thus A = [aij]m × n is a zero Matrixif aij = 0 for all i and j.
(7) Diagonal matrix : If all elements except the principal diagonal in a square matrixare zero, it is called a Diagonal Matrix. Thus a square matrix.
(8) Scalar Matrix : If all the elements of the diagonal of a diagonal matrix areequal, it is called a Scalar Matrix.
(9)Unit Matrix : If all the elements of principal diagonal in a diagonal matrix are1, then it is called Unit matrix. A unit Matrix of order n is denoted by In.
(10) Triangular Matrix : A square matrix [aij] is said to be triangular matrix if eachelement above or below the principal diagonal is zero it is of two types
(a) Upper Triangular Matrix : A square matrix [aij] is called the Upper Triangu-lar Matrix, if a ij = 0 when i > j.
(b) Lower Triangular Matrix : A square matrix [aij] is called the Lower TriangularMatrix, if a ij = 0 when i < j.
(11) Singular Matrix : Matrix A is said to be Singular Matrix if its determinant A = 0,otherwise non-singular matrix i.e.
If det |A| = 0 Singular and det |A| 0 non-singular.C. Addition and Subtraction of matrices :
If A [aij]m × n and [bij]m × n are two matrices of the same order then their sum A + B isa matrix whose each element is the sum of corresponding element.
D. Scalar multiplication of matrices :kA thus if A = [Aij]m × n then kA = Ak = [kaij]m × n
E. Properties of scalar multiplication :If A, B are Matrices of the same order and , are any two scalars then(1) (A + B) = A + B(2) ( + ) A = A + A(3) ( – A) = (A) – (A)(4) (–A) = – (A) = (–A)(5) tr(kA) = k tr (A)
F. Multiplication of matrices : If A and B be any two matrices, then their product ABwill be defined only when number of column in A is equal to the number of rows in B.If A = [Aij]m × n and B = [bij]m × p then their product AB = C = [cij], will be matrix of
order m × p , where (AB)ij = Cij =
n
1rrjirba

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 80
G. Properties of matrix multiplication : If A, B and C are three matrices such thattheir product is defined, then(1) AB BA (Generally not commutative)(2) (AB) C = A (BC) (Associative Law)(3) IA = A = AI
(I is identity matrix for matrix multiplication)(4) A (B + C) = AB + AC (Distributive Law)(5) If AB = AC B = C
(Cancellation Law is not applicable)(6) If AB = 0
(It does not mean that A = 0 or B = 0, again product of two non-zero matrix maybe zero matrix)
(7) tr (AB) = tr (BA)
H. Positive integral powers of a matrix : The positive integral powers of a matrixA are defined only when A is a square matrix.Also then A2 = A.A A3 = A.A.A. = A2AAlso for any positive integers m, n(1) AmAn = Am + n
(2) (Am)n = Amn = (An)m
(3) In = I, Im = I(4) Aº = In where A is a square matrices of order n.
I. Transpose of matrix :If order of A is m × n, then order of AT is n × m.Properties of Transpose :(1) (AT)T = A(2) (A ± B)T = AT ± BT
(3) (AB)T = BT AT
(4) (kA)T = k(A)T
(5) (A1A2A3 .... An–1 An)T = AnT An–1
T.... A3TA2
TA1T
(6) IT = I(7) tr (A) = tr (AT)
J. Symmetric matrix : A square matrix A = [Aij] is called Symmetric Matrix if aij = aji forall i,j or AT = A
K. Skew - symmetric matrix : A square matrix A = [aij] is called skew - symmetric matrix ifaij = – aji for all i, j

Page : 81 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
Every square matrix A can unequally be expressed as sum of a symmetric and Skew
Symmetric Matrix i.e. A =
)AA(
21)AA(
21 TT
L. Adjoint of a matrix : If A = [aij] be a square matrix and Fij be the cofactor of aij in |A|,then Adj. A = [Fij]T
M. Inverse of a matrix : If A & B are two matrices such that AB = I = BA then B is calledthe inverse of A and it is denoted by A–1, thus A–1 = B AB = I = BA to find inverse
matrix of a given matrix A we use following formula A–1 = |A|Aadj
Thus AA–1 exists |A|
0
N. Some special cases of matrices :(1) Orthogonal Matrix : A square matrix A is called Orthogonal if AAT = I + ATA(2) Idempotent Matrix : A square matrix A is called an Idempotent Matrix if A2 = A(3) Involutory Matrix : A square matrix A is called an involutory Matrix if A2 = I or A–
1 = A(4) Nilpotent Matrix : A square matrix A is called a Nilpotent Matrix if there exist a p
N such that AP = 0
O. Minor and Cofactor :
If = 333231
232221
131211
aaaaaaaaa
then Minor of a111 is
M11 = 3332
2322aaaa
, Similarly M12 = 3331
2321aaaa
The cofactor of an element aij is denoted by Fij & is equal to (–1)i+j Mij where M is aMinor of element aij
If = 333231
232221
131211
aaaaaaaaa
then

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 82
F11 = (–1)1+1 M11 = M11 = 2332
2322aaaa
F12 = (–1)1+2 M12 = – M12 = – 3331
2321aaaa
Remarks :(1) The sum of products of the element of any row with their corresponding cofactor is
equal to the value of determinanti.e. = a11F11 + a12F12 + a13F13
(2) The sum of the product of element of any row with corresponding cofactor of anotherrow is equal to zero i.e. a11F21 + a12F22 + a13F23 = 0
(3) If order of a determinant () is 'n' then the value of the determinant formed byreplacing even element by its cofactor is n–1.
P. Multiplication of two determinants :
Multiplication of two third order Determinants is defined as follows 333
222
111
cbacbacba
× 333
222
111
nmnmnm
= 332313332313332313
322212322212322212
312111312111312111
mcnbnamcmbmacbancnbnamcmbmacbancnbnamcmbmacba
Q. Differentiation of determinants :
Let (x) = )x(g)x(f)x(g)x(f
2211 , where f1(x), f2(x), g1(x)
and g2(x) are functions of x. Then
'(x) = )x(g)x(f)x('g)x('f
2211 + 1 1
2 2f (x) g (x)f '(x) g '(x)
Also, '(x) = 1 12 2f '(x) g (x)f '(x) g (x) + 1 1
2 2f (x) g '(x)f (x) g '(x)
Thus, to differentiate a determinant, we differentiate one row (or column) at a time,keeping others unchanged.
Page : 83 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
R. Symmetric determinant : A determinant is called symmetric determinant if forits every element aij = aji i, j
S. Skew symmetric determinant : A determinant is called skew symmetric determi-nant if for its every element aij = – aji i, j
T. Crammer's rule : Consider three linear simultaneous equation in x, y, za1x + b1y + c1z = d1 ...(i)a2x + b2y + c2z = d2 ...(ii)a3x + b3y + c3z = d3 ...(iii)
i.e. x = 1 , y =
2 , z =
3
Case - I If 0 then x = 1 , y =
z , z =
3
The system is consistent and has unique solutionsCase - II If = 0 and(a) If at least one of 1, 2, 3 is not zero then the system of equation is inconsistent
i.e. has no solution.(b) If d1 = d2 = d3 = 0 or 1, 2, 3 are all zero then the system of equation may
consistent and may live infinitely many solutions.
A. Real number system :(1) Natural Numbers (N) : N = {1, 2, 3, ....}(2) Whole Numbers (W) : W = {0, 1, 2, ....} = {N} + {0}(3) Integers (Z or I) :
Z or I = {.... –3, –2, –1, 0, 1, 2, 3, ....}(4) Rational Numbers (Q) : The number which are in the form of p/q (where p, q
, q 0 )(5) Irrational Numbers : The numbers which are not rational i.e. which can not be
expressed in p/q form or whose decimal part is non terminating non repeating but
which may represent magnitude of physical quantities e.g. 2 , 51/3, , e .... etc.
(6)Real Numbers (R) : The set of Rational and Irrational Number is called asset of Real Numbers i.e. N W Z Q R
B. Imaginary Numbers :
x = ± 1 is imaginary and 1 = i (iota)

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 84
Remark : If a, b are positive real numbers then
a × b = – ab
C. Integral powers of iota :i = 1 so i2 = – 1; i3 = – i and i4 = 1Hence i40 + 1 = i ; i4n+2 = –1
i4n+3 = –i ; i4n or i4n+4 = 1 im = i4n+r = (i4)n ir = (1)n ir = ir
D. Complex numbers : A number of the form z = x + iy where x, y R and i = 1 iscalled a complex number where x is called as real part and y is called imaginary partof complex number and they are expressed as Re(z) = x, Im (z) = y
|z| = 22 yx ; amp (z) = arg (z) = = tan–1 xy
(1) Polar representation :
x = r cos, y = r sin & r = 22 yx = |z|
(2) Exponential form :z = rei (where ei = cos + i sin )
(3) Vector representation :
P (x, y) then the vector representation is z =
OP
E. Properties of conjugate complex number :Let z = a + ib be a complex number. Then the conjugate of z is denoted by z andis equal to a – ib Thus, z = a + ib z = a – ib(1) )z( = z
(2) z + z = 2a = 2 Re (z) = purely real(3) z – z = 2ib = 2i Im (z) = purely imaginary(4) z z = a2 + b2 = |z|2 = {Re(z)}2 + {Im(z)}2
(5) z + z = 0 or z = – z z = 0 or z is purely imaginary(6) z = z z is purely real.
F. Properties of modulus of a complex Number :(1) z z = |z|2
(2) z–1 = 2|z|z

Page : 85 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(3) |z1 ± z2|2 = |z1|2 + |z2|2 ± 2Re (z1 z 2)(4) |z1 + z2|2 + |z1 – z2|2 = 2 [|z1|2 + |z2|2]
G. Properties of argument and modulus of a complex Number :If z, z1 and z2 are complex numbers, then(1) arg (any real positive number) = 0
(2) arg (any real negative number) =
(3) arg (z – z ) = ± /2
(4) arg (z1 . z2) = arg (z1) + arg (z2)
(5) arg(z1 z 2) = arg(z1) – arg(z2)
(6) arg
2
1zz
= arg (z1) – arg (z2)
(7) arg ( z ) = – arg (z) = arg (1/z)(8) arg (–z) = arg (z) ±
(9) arg (zn) = n arg (z)
(10) arg (z) + arg ( z ) = 0
(11) |z1 + z2|2 = |z1|2 + |z2|2 + 2|z1| |z2| cos (1 – 2),
where 1 = arg(z1) and 2 = arg(z2)
or |z1 + z2|2 = |z1|2 + |z2|2 + 2 Re (z1 z 2)
(12) |z1 – z2|2 = |z1|2 + |z2|2 – 2|z1| |z2| cos (1 – 2),
where 1 = arg(z1) and 2 = arg(z2)
or |z1 – z2|2 = |z1|2 + |z2|2 – 2 Re (z1 z 2)
(13) |z1 + z2|2 + |z1 – z2|2 = 2(|z1|2 + |z2|2)
(14) |z1 + z2| = |z1 – z2| arg(z1) – arg(z2) = /2
(15) |z1 + z2| = |z1| + |z2| arg(z1) = arg(z2)
(16) |z1 + z2| = |z1|2 + |z2|2 2
1zz
is purely imaginary..
If |z1| 1, |z2| 1, then
(17) |z1 – z2|2 (|z1| – |z2|)2 + (arg(z1) – arg(z2))2
(18) |z1 + z2|2 (|z1| + |z2|)2 – (arg(z1) – arg(z2))2
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 86
H. Square roots of a complex number :The square root of z = a + ib is
iba = ±
2
a|z|i2
a|z|for b > 0 and
±
2
a|z|i2
a|z| for b < 0
I. Triangle inequalities :(1) |z1 ± z2| |z1| + |z2| (2) |z1 ± z2| |z1| – |z2|
J. Some important points :(1) If ABC is an equilateral triangle having vertices z1, z2, z3 then z1
2 + z22 + z3
2 = z1z2+z2z3 + z3z1
or 21 zz
1 +
32 zz1 +
13 zz1 = 0
(2) If z1, z2, z3, z4 are vertices of parallelogram then z1 + z3 = z2 + z4(3) If z1, z2, z3 are the affixes of the points A, B, and C in the Argand plane, then
(a) BAC = arg
12
13zzzz
(b) 12
13zzzz
= |zz||zz|
12
13
(cos + i sin ),
where = BAC.
K. Equation of a circle : The equation of a circle whose centre is at point having affix z0and radius R is |z – z0| = R
L. De-moivere's theorem :
Statement :(i) If n Z (the set of integers), then (cos + i sin )n = cos n + i sin n
(ii) If n Q (the set of rational numbers) then cos n + i sin n is one of the
values of (cos + i sin )n.

Page : 87 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
M. Roots of a complex number : Let z = a + ib be a complex number, and let r (cos + i sin ) be the polar form of z. Then by De Moivere's theorem r1/n
nsini
ncos is one of the values of z1/n.
(1) Roots of unity :nth roots of unity are : 0 = 1, , 2, 3 ,..., n–1
where = ei 2/n = cos 2 / n + i sin 2/n.
(2) Properties of nth roots of unity :(a) nth roots of unity form a G.P. with common ratio ei 2/n.(b) Sum of nth roots of unity is always zero.(c) Sum of pth powers of nth roots of unity is zero, if p is not z multiple of n.(d) Sum of pth powers of nth roots of unity is n, if p is a multiple of n.(e) Product of nth roots of unity is (–1)n–1
(f) nth roots of unity lie on the unit circle |z| = 1 and divide its circumference into nequal parts.
(3) Cube roots of unity :cube roots of unity are 1, , 2, where = ei 2/3
(4) Properties of cube roots of unity :(a) Cube roots of unity are 1, , 2
where = – 21
± i23 = ei 2/3
(b) arg () = 2/3 and arg (2) = 4/3(c) and 2 are roots of the equation z2 + z + 1 = 0(d) Cube roots of unity lie on the unity circle |z| = 1 and divide its circumference
into three equal parts.
(e) 1 + n + 2n =
3ofmultipleaisnif,33ofmultipleanotisnif,0
(f) Cube roots of –1 are –1, –, –2
(g) – and –2 are roots of z2 – z + 1 = 0

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 88
PART-IV
CO-ORDINATE GEOMETRY
A. Distance formula :(1) Distance between two points :
(x1, y1) and (x2, y2) = 212
212 )yy()xx(
= 22 )ordinatesof.Diff()abscissasof.Diff(
(2) Distance of (x1, y1) from origin : 21
21 yx
Remark : If two vertex A(x1, y1), B(x2, y2) are given then third vertex of equilateral
triangle C is
2
)xx(3yy,2
)yy(3xx 12211221
B. Section formula :(1) Point P(x, y) which divides the join of two given points A(x1, y1) and B(x2, y2)
in a given ratio m1: m2 (m1, m2 > 0, m1 m2 , internally and externally) thencoordinate of p is given by
)externally(
)ernally(int
mmymymy
mmymymy
mmxmxmx
mmxmxmx
21
122121
1221
21
122121
1221
P(x,y)
B(x ,y )2 2
m1
m1
m2
m2
A(x ,y )1 1
A(x ,y )1 1
B(x ,y )2 2
P(x,y)
(2) Co-ordinates of any point on the join of A(x1, y1) and B(x2, y2) can be taken as
1yy,
1xx 1212
(This point divides the given line in the ratio : 1)

Page : 89 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(3) Mid point of A & B is
2yy,
2xx 2121
C. Special points in a triangle with co-ordinates :(1) Centroid (G) : Definition :
Intersection point of all three medians in a triangle.(a) G divides median into 2 : 1.
P
Q RL
N MG
(x , y )1 1
(x , y )2 2 (x , y )3 3
(b) G always lies inside the triangle.
(c) Co-ordinates of G is
3yyy,
3xxx 321321 or
3y
,3x 11
(2) Incentre (I) : Definition :Intersection point of internal angles bisector.(a) I always lies
inside the triangle.(b) Internal angle bisector
P
Q RL
N Mr r
r Idivides the base in theratio of adjacent sides.
(c) Co-ordinates of I is
cbacybyay,
cbacxbxax 321321
where a, b, c are the lengths of the sides of the (3) Ex-centres (I1, I2, I3) : Definition :The centre of the escribed circle which is opposite
to vertices.To get I1 (or I2 or I3) replace a by –a (b by –b or c by –c) in formula of coordinateof I
(4) Circumcentre (C) : Definition :Intersection point of perpendicular bisector of sides.(a) For acute angle lies inside

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 90
(b) For obtuse angle lies outside(c) For right angle
Mid point of hypotenuse(d) Co-ordinates of
P
Q RC
circumcentre is
C2sinB2sinA2sinC2sinyB2sinyA2siny,
C2sinB2sinA2sinC2sinxB2sinxA2sinx 321321
(5) Orthocentre (O) : Definition :Intersection point of altitudes.(a) For acute angle lies inside(b) For obtuse angle lies outside(c) For right angle
vertex at ar
(d) Co-ordinates of
LQ R
MN
P
Oorthocentre is
CtanBtanAtanCtanyBtanyAtany,
CtanBtanAtanCtanxBtanxAtanx 321321
D. Harmonic Conjugate : If P is a point that divides AB internally in the ratio m1 : m2and Q is another point which divides AB externally in the same ratio m1 : m2, then thepoint P and Q are said to be Harmonic conjugate to each other with respect to A and B.
A P B Q
i.e. AP , AB and AQ forms a HP AP1
+ AQ1
=AB2
Remark : Internal and External angle bisector of an angle divides the base harmoni-cally.
Do You Know ?
Do you know ?
(a) In any triangle O, G, C are collinear.(b) In any triangle G divides the line joining O & C in ratio 2 : 1.(c) In an equilateral triangle O, G, C, I are coincident.(d) In an isosceles triangle O, G, C, I are collinear.
Page : 91 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
E. Area of a triangle whose vertices are (x1, y1), (x2, y2) and (x3, y3) :
= 1yx1yx1yx
21
332211
Modulus sign
Remark : If A, B, C are taken in anticlockwise direction there is no need to putmodulus in the formula to calculate area.
F. Condition of collinearity :
Three points A(x1, y1), B(x2, y2) and C(x3, y3) are collinear if and only if 1yx1yx1yx
332211
=
0G. Locus : Def. Locus is a path traced by any moving point with in given geometrical
constraints.Remark : All those points which satisfy the given geometrical condition will definitelylie on the locus. But converse is not true always.(1) Inclination of a line : Its a measure of the smallest non-negative
angle which the linemakes with +ve direction x
y
of the x-axis [angle beingmeasured in anti-clockwisedirection]. 0 <
(2) Slope of the line : If the inclination of line is and 2
then its slope is defined
as tan and denoted by ‘m’(a) If = 0, then m = 0 i.e. line parallel to x-axis.(b) If = 90º, then m does not exist i.e. line parallel to y-axis
(c) Slope of line joining two points A(x1, y1) & B(x2, y2) is 12
12xxyytanm
(d) If a line equally inclined with co-ordinate axes then slope is ± 1.(3) Intercepts : The point where a line cuts the x-axis (or y-axis) is called its
x-intercept (or y-intercept).(a) Intercepts may be +ve, –ve or zero.(b) A line making an intercept of –a with y-axis means the line passing through (0,–a)

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 92
(c) A line makes equal non-zero intercept with both co-ordinate axes thenslope is –1.
(d) A line makes non-zero intercept with both co-ordinate axes equal in mag-nitude then slope is ±1.
H. Equation of Straight line in different form :(1) General Form : ax + by + c = 0(2) Point slope form : The equation of a straight line passing through a fixed point A(x1,
y1) & having a slope equal to m is given by (y–y1) = m (x–x1)(3) Two point form : The equation of a straight line passing through a fixed point
A(x1, y1) & B(x2, y2) and having a slope equa l to m is g iven by
(y – y1) =
12
12xxyy
(x – x1) where m = 12
12xxyy
(4) Slope Intercept form : The equation of a straight line whose y-intercept is givenas ‘c’ & slope is ‘m’ is given by y = mx + c
compare with ax + by + c = 0 or y = –ba
x – bc
yoftcoefficienxoftcoefficienm
(5) Double intercept form : The equation of a straight line passing through A(a, 0) &
B(0, b) and having a slope m = –b/a is given by ax
+by
= 1; where x-intercept is a &
y-intercept is b.(6) Normal Form : The equation of a straight line situated at a ar distance of p from
the origin & this ar makes an angle with +ve direction of x-axis is given byx cos + y sin = p
mB(0, cosec )p
( sec ,0)p A
p( 0 < 2)where m= – cot andp = length of ar from origin
I. Angle between two given lines :21
21mm1mmtan
(1) If angle between two st. lines is asked always given acute angle unless satisfied.(2) If m1 = m2 tan = 0 i.e. lines are parallel or coincident
Page : 93 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(3) A line parallel to ax + by + c = 0 may be taken as ax + by + = 0
(4) If m1m2 = – 1 tan = = 2
i.e. lines are perpendicular..
(5) A line perpendicular to ax + by + c = 0 may be taken as bx –ay + = 0(6) If m1m2 = 1 1 + 2 = 90º
i.e. lines makes complementary angles with the x-axis.(7) If m1 + m2 = 0 1 + 2 = 180º
i.e. lines makes supplementary angles with x-axis or lines are equally inclinedto the x-axis or if lines pass through origin then the co-ordinate axes are anglebisector of angle between these two lines.
(8) To find the tangents of the interior angles of a formed by three lines, firstarrange L1, L2, L3 in their descending order of slopes i.e. m1 > m2 > m3.
(In this case do not put modulus on angle formula)
J. Length of the ar from P(x1, y1) to the l ine L : ax + by + c = 0 :
2211
ba
cbyaxp
K. DIstance between parallel lines : 2212
ba
CCp
L. Area of parallelogram with given sides :
21
2121mm
)dd()CC(Area
y = m x + C1 2
y = m x + C1 1A
D C
B
y = m x + d2 2 y = m x + d2 1p1
p2
M. Condition of parallelogram as shown becomes a rhombus :
2221
2221
21ba
dd
ba
ccpp

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 94
N. Parametric form :
rsin
yycos
xx 11
where r parameter
inclination of line (fixed) ; 0 < sin > 0 and cos may be +ve or –ve.Co-ordinates of any point P in parametric form(x, y) (x1 ± r cos , y1 ± r sin )Reamrk : Whenever distance are involved think about parametric.
O. Position of a point w.r. to a line L : Ax + By + c = 0(1) If the points P(x1, y1) & Q(x2, y2) lies on the same side of the line Ax + By
+ C = 0 then the expressions Ax1 + By1 + C & Ax2 + By2 + C have same signotherwise if P and Q lies on opposite side then Ax1 + By1 + C and Ax2 +By2 + C will have opposite sign.
(2) If only one point is given then position of that point is checked w.r. to origin.
P. Condition for concurrency : Three linesL1 : ax1 + by1 + c1 = 0 ; L2 : ax2 + by2 + c2 = 0 ;
L3 : ax3 + by3 + c3 = 0 are concurrent if and only if 333222111
cbacbacba
= 0
Q. Family of Straight line :(1) The general equation of a line through the intersection of two given lines
P = 0 and Q = 0 is P + Q = 0(2) The line through the intersection P = 0 and Q = 0 and perpendicular or
parallel to R = 0 is P – Q = 0
R. Reflection (Image) of a point P() about a line (ax + by + c = 0) :
22 ba)cba(2
by
ax
A
Q(h,k) reflection)
)Given(),(P
0 B
S. Foot of perpendicular from a point (, ) to a given line ax + by + c = 0 :
22 ba)cba(
by
ax
Page : 95 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
T. Shifting of the origin :x, y old co-ordinates axesX, Y New co-ordinate axesX = 0 x – a = 0 x = a
y–b
y
x aa
y Y
(0,0) Ox' x
X' X
b
P(x y)1
y' Y'
x
(a,b)
Y = 0 y – b = 0 y = bSlope and area of closed figureremains unchanged under the translation of co-ordinate axes.
U. Angle Bisector : Locus of equation of angle bisectors.
22
22
22221
21
111
ba
cybxa
ba
cybxa
(a) Angle bisectors of 2 lines are always perpendicular.(b) Any point on the bisector is equidistant from given lines.(1) To differentiate between origin containing & not origin containing angle
bisector :
Origin containing angle bisector + sign 21
21
22221
21
111
ba
cybxa
ba
cybxa
Non-origin containing angle bisector
– sign.21
21
22221
21
111
ba
cybxa
ba
cybxa
Remark : The sign of c1 & c2 must be positive.(2) To differentiate between acute & obtuse angle bisector.(a) If be the angle between one of the given lines and any one bisector then find tan
. If |tan | < 1, it is the bisector of the acute and if |tan | > 1, then it is the bisectorof the obtuse angle.
(b) If the lines a1x + b1y + c1 = 0 & a2x + b2y + c2 = 0. First make the constant c1 andc2 positive. Now evaluate a1 a2 + b1 b2 and if +ve sign then origin lines in obtuseangle and if a1 a2 + b1 b2 is –ve then origin lies in acute angle.
V. Pair of straight lines : Combined equation of two lines passing through originax2 + 2hxy + by2 = 0which is 2nd degree homogeneous equation

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 96
(1) If h2 – ab > 0 i.e. lines are real and distinct.If h2 – ab = 0 i.e. lines are real and coincident.If h2 – ab < 0 i.e. lines are imaginary with real point of intersection as origin.
(2) Combined equation of co-ordinate axes 0xy
(3) If y = m1x & y = m2x two lines are given by ax2 + 2hxy + by2 = 0 then
bamm&
bh2mm 2121
(4) Angle between two lines represented ax2 + 2hxy + by2 = 0 baabh2tan
2
(5) Condition for the lines to be perpendicular
0ba0yoftcoefficienxoftcoefficien 22
(6) Condition for the lines to be parallel or coincident. abh2
(7) Combined equation of angle bisectors :
hxy
bayx 22
(8) Product of the ar dropped from P(x1, y1) to the pair of lines represented by
ax2 + 2hxy + by2 = 0 is 22
21
22
21
211121
2121
22
2111
21
mmmm1yyx)mm(xmmor
h4)ba(
byyhx2ax
(9) Combined equation of line not passing through origin : ax2 + 2hxy + by2 + 2gx+ 2fy + c = 0 represent a pair of st. lines if
D abc + 2fgh – af2 – bg2 – ch2 = 0 or cfgfbhgha
= 0
W. Homogenization : Combined equation of line pair joining origin to the point ofintersection of given line say lx + my + n = 0 with any 2nd degree curve ax2 + 2hxy +by2 + 2gx + 2fy + c = 0 can be obtained by homogenizing the curve with the help ofgiven line. ax2 + 2hxy + by2 +........
+ 2gx
nmyx
+ 2fy
nmyx
+ C2
nmyx
= 0

Page : 97 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
A. Definition : Circle is a locus of a point whose distance from a fixed point alwaysremains constant.(1) Equation of circle with centre (a, b) and radius r : (x – a)2 + (y – b)2 = r2
(2) Equation of circle with centre as origin and radius r : x2 + y2 = r2
B. General equation of circle :x2 + y2 + 2gx + 2fy + c = 0(Provided coeff. of x2 = coeff. of y2 = 1)
where center (–g,–f)
yof.coeff
21,xof.coeff
21
& Radius r = cfg 22
(1) Necessary and sufficient condition for general equation of degree two :i.e. ax2 + by2 + 2hxy + 2gx + 2fy + c = 0to represent a circle is(a) coefficient of x2 = coefficient of y2 a = b
(Not necessarily unity) and(b) coefficient of xy = 0 h = 0
(2) Nature of circle :(a) If g2 + f2 – c > 0 i.e. circle is real(b) If g2 + f2 – c = 0 i.e. circle is point circle(c) If g2 + f2 – c < 0 i.e. circle is imaginary
C. Diametrical form of circle : The equation of circle with A (x1, y1) and B (x2, y2) as itsdiameter end point is (x – x1) (x – x2) + (y – y1) (y – y2) = 0.
D. x-Intercept (or y-intercept) of circlex2 + y2 + 2gx + 2fy + c = 0 :
|x1 – x2| = 2 cg2
cf2|yy|or 2
21
Remark : If circle pass through origin i.e. c = 0 then x-intercept (or y-intercept)= 2| g | (or 2| f |)
E. Position of a point P(x1, y1) w.r. to a circleS : x2 + y2 + 2gx + 2fy + c = 0:S1 = x1
2 + y12 + 2gx1 + 2fy1 + c
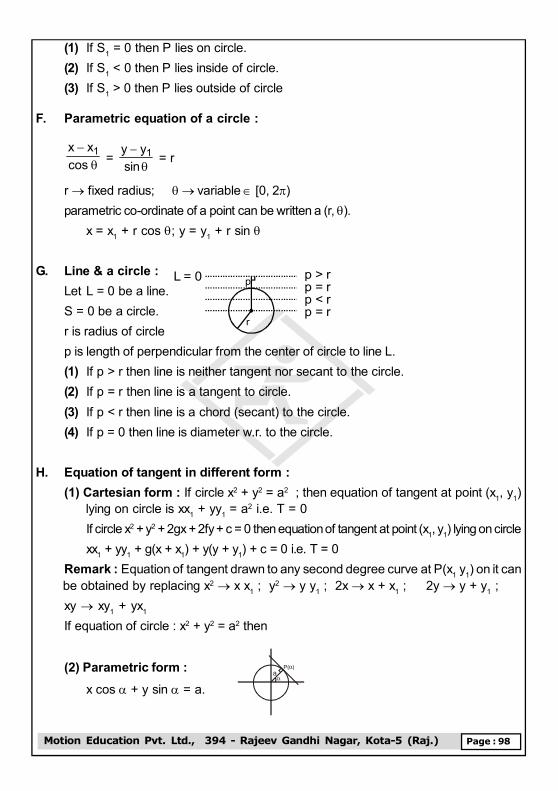
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 98
(1) If S1 = 0 then P lies on circle.(2) If S1 < 0 then P lies inside of circle.(3) If S1 > 0 then P lies outside of circle
F. Parametric equation of a circle :
cosxx 1 =
sinyy 1 = r
r fixed radius; variable [0, 2)parametric co-ordinate of a point can be written a (r, ).
x = x1 + r cos ; y = y1 + r sin
G. Line & a circle :Let L = 0 be a line.S = 0 be a circle.
p > rp = rp < rp = r
p
r
L = 0
r is radius of circlep is length of perpendicular from the center of circle to line L.(1) If p > r then line is neither tangent nor secant to the circle.(2) If p = r then line is a tangent to circle.(3) If p < r then line is a chord (secant) to the circle.(4) If p = 0 then line is diameter w.r. to the circle.
H. Equation of tangent in different form :(1) Cartesian form : If circle x2 + y2 = a2 ; then equation of tangent at point (x1, y1)
lying on circle is xx1 + yy1 = a2 i.e. T = 0If circle x2 + y2 + 2gx + 2fy + c = 0 then equation of tangent at point (x1, y1) lying on circlexx1 + yy1 + g(x + x1) + y(y + y1) + c = 0 i.e. T = 0
Remark : Equation of tangent drawn to any second degree curve at P(x1 y1) on it canbe obtained by replacing x2 x x1 ; y2 y y1 ; 2x x + x1 ; 2y y + y1 ;xy xy1 + yx1
If equation of circle : x2 + y2 = a2 then
(2) Parametric form :x cos + y sin = a.
aP( )
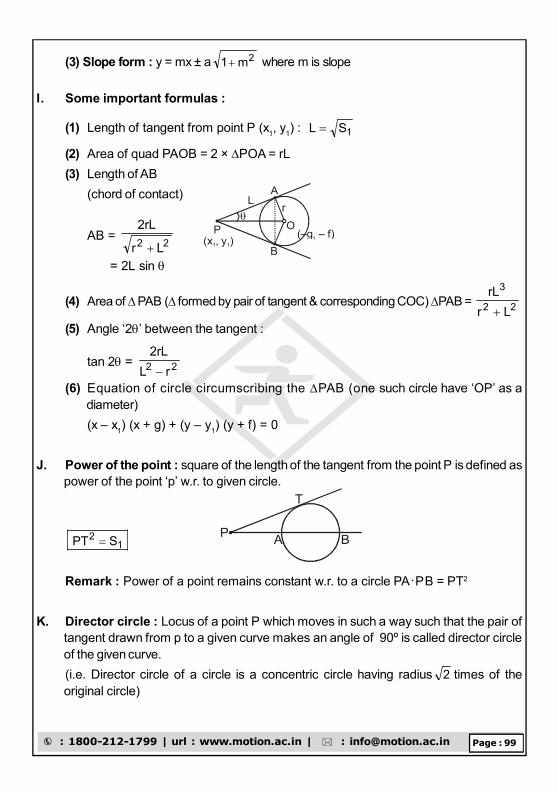
Page : 99 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(3) Slope form : y = mx ± a 2m1 where m is slope
I. Some important formulas :
(1) Length of tangent from point P (x1, y1) : 1SL
(2) Area of quad PAOB = 2 × POA = rL(3) Length of AB
(chord of contact)
AB = 22 Lr
rL2
L
ArO
(–g – f)1
B(x y )1 1,
P
= 2L sin
(4) Area of PAB ( formed by pair of tangent & corresponding COC) PAB = 22
3
LrrL
(5) Angle ‘2’ between the tangent :
tan 2 = 22 rLrL2
(6) Equation of circle circumscribing the PAB (one such circle have ‘OP’ as adiameter)(x – x1) (x + g) + (y – y1) (y + f) = 0
J. Power of the point : square of the length of the tangent from the point P is defined aspower of the point ‘p’ w.r. to given circle.
12 SPT
P A B
T
Remark : Power of a point remains constant w.r. to a circle PA.PB = PT2
K. Director circle : Locus of a point P which moves in such a way such that the pair oftangent drawn from p to a given curve makes an angle of 90º is called director circleof the given curve.(i.e. Director circle of a circle is a concentric circle having radius 2 times of theoriginal circle)

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 100
L. Equation of chord with given mid point (x1, y1) of the circle x2 + y2 + 2gx + 2fy+ c = 0 :
1ST where T xx1 + yy1 + g(x + x1) + f(y + y1) + c
& S1 x12 + y1
2 + 2gx1 + 2fy1 + c
M. Chord of contact AB :
0T P
A
B
N. Equation of Pair of tangent PA & PB :
21 TSS
O. Family of circle :(1) Equation of family of circles which passes through the point of intersection of two
circles S1 = 0 and S2 = 0 is may be given as : 0SS 21 –1
(2) Equation of family of circles passes through the point of intersection of a circles
S = 0 and a line L = 0 is 0LS
(3) Equation of family of circles passing through two given points A(x1, y1) &B(x2, y2) is
(x – x1) (x – x2) + (y – y1) (y – y2) + 1yx1yx1yx
2211 = 0
(4) Equation of family of circles touching a line (L = 0) at the fixed point (x1, y1) lying onthe line ‘L’ is
(x – x1)2 + (y – y1)2 + L = 0 i.e. 0LS
(5) Equation of circle circumscribing a triangle whose sides are given by 1 = 0,2 = 0 and 3 = 0. is given by 1 2 + 2 3 + 3 1 = 0.
(6) Equation of circle circumscribing a quadrilateral whose side in order are represented
by lines 1 = 0, 2 = 0. 3 = 0 and 4 = 0 is given by 04231

Page : 101 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
P. Common tangents to two circles :D.C.T. Direct common tangent
(or external common tangent)T.C.T. Transverse common tangent
(or internal common tangent)(1) If two circle are separated :
c1 c2 > r1 + r2
4 common tangent r1 r2
c1 c2
2 D.C.T. & 2 T.C.T.
(2) If two circles touches externally :c1c2 = r1 + r2
r1 r2c1 c2
3 common tangent 2 D.C.T. & 1 T.C.T.
(3) If two circles intersect each other :|r1 – r2| < c1 c2 < r1 + r2
2 common tangent r1r2c1 c2 2 D.C.T
(4) If two circles touches internally :c1c2 = |r1 – r2| 1 common tangent r2
c2
r1
c1
1 D.C.T
(5) If one circle is completelycontained in another circle :c1 c2 < |r1 – r2|
c1
c2
r1r2
No common tangent
(6) Length of D.C.T. :
d2 = 2.extL + (r2 – r1)2 ; Lext. = 2
122 )rr(d
r1
c1
r2
c2d
ABLext.
|r – r |2 1
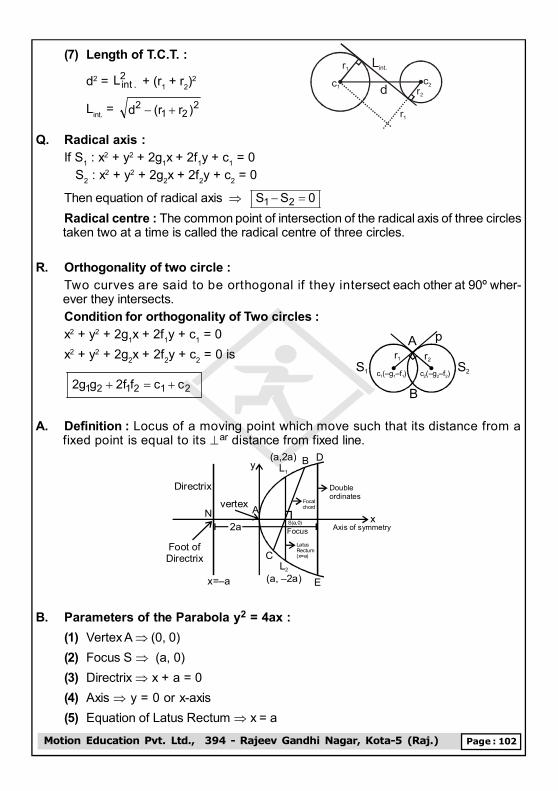
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 102
(7) Length of T.C.T. :
d2 = 2.intL + (r1 + r2)2
r1
c1 r2
c2d
Lint.
r1Lint. = 2
212 )rr(d
Q. Radical axis :If S1 : x2 + y2 + 2g1x + 2f1y + c1 = 0 S2 : x2 + y2 + 2g2x + 2f2y + c2 = 0
Then equation of radical axis 0SS 21
Radical centre : The common point of intersection of the radical axis of three circlestaken two at a time is called the radical centre of three circles.
R. Orthogonality of two circle :Two curves are said to be orthogonal if they intersect each other at 90º wher-ever they intersects.Condition for orthogonality of Two circles :x2 + y2 + 2g1x + 2f1y + c1 = 0x2 + y2 + 2g2x + 2f2y + c2 = 0 is r1 r2
c –1( g –f )1 1 c –2( g –f )2 2
p
S1 S2
A
B212121 ccff2gg2
A. Definition : Locus of a moving point which move such that its distance from afixed point is equal to its ar distance from fixed line.
EL
(a, –2a)2
C
2a
Foot ofDirectrix
N
Directrix
y(a,2a)
L1
DB
Focalchord
x=–a
Avertex
S(a,0)
Doubleordinates
xAxis of symmetry
LatusRectum(x=a)
Focus
B. Parameters of the Parabola y2 = 4ax :(1) Vertex A (0, 0)(2) Focus S (a, 0)(3) Directrix x + a = 0(4) Axis y = 0 or x-axis(5) Equation of Latus Rectum x = a

Page : 103 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(6) Length of Latus Rectum 4a(7) Ends of Latus Rectum (a, 2a), (a, –2a)(8) The focal distance sum of abscissa of the point and distance between vertex
and Latus RectumC. Parametric form of parabola : y2 = 4ax are x = at2, y = 2at and for parabola x2 = 4ay
is x = 2at, y = at2
D. Equation of chord joining any two point of a parabola : If the points are(at12, 2at1) and (at2
2, 2at2) then the equation of chord is (t 1 + t2) y = 2x+ 2at1 t2 ..........(i)
slope of the chord = 21 tt
2
(1) If euqation (i) passes through a fixed point (c, 0) then t1t2 = – ac
(constant)
If equation (i) passes through focus then t1t2 = –1(2) If one end of focal chord of parabola is (at2, 2at), then other end will be (a/t2, –2a)
and length of focal chord = a (t + 1/t)2 ; min. length = 4a(3) The length of the chord joining two points 't1' and 't2' on the parabola y2 = 4ax
is
a(t1 – t2) 4)tt( 221
(4) The length of the chord of the parabola intercepted on y = mx + c is 2m4
)mca)(m1(a 2 .
E. Condition of tangency :(1) The line y = mx + c touches a parabola y2 = 4ax then c= a/m(2) The line y = mx + c touches parabola x2 = 4ay if c = – am2
F. Equation of Tangent :(1) Point Form : The equation of tangent to the parabola y2 = 4ax at the point
(x1, y1) is yy1 = 2a(x + x1) or T = 0.
(2) Parametric Form : The equation of the tangent to the parabola at P(t) i.e.(at2, 2at) is ty = x + at2
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 104
(3) Slope Form : The equation of the tangent of the parabola
y2 = 4ax is y = mx + ma
& point of contact (a/m2, 2a/m)
(4) Intersection point of tagnets on P(t1) & Q(t2) is x = at1t2 ; y = a(t1 + t2)(5) Director circle : Director circle is the locus of point of intrsection of two
perpendicular tagnentsRemark : In parabola director circle is its directrix i.e. x = – a
G. Equation of normal :(1) Point Form : The equation to the normal at the point (x1, y1) of the parabola
y2 = 4ax is given by y – y1 = a2y1
(x – y1).
(2) Parametric Form : The equation to the normal at the point (at2, 2at) is y + tx =2at + at3.
(3) Slope Form : Equation of normal in terms of slope m is y = mx + 2am – am3.(4) The foot of the normal is (am2, – 2am)
H. Highlights on Normal :(1) Intersection point of normal at P(t1) & Q(t2) : x = a(t12 + t22 + t1t2 + 2) ;y = –at1t2(t1 + t2)
(2) If normal at P(t1) meets the parabola again at Q(t2) then t2 = – t1 – 1t2
(3) If normal at P(t1) & Q(t2) meet the parabola again at R(t3)then t1t2 = 2 & t1 + t2 + t3 = 0
(4) Maximum three normals can be drawn from a point on the parabola.(5) The algebraic sum of the slopes of three concurrent normals is zero.(6) Algebraic sum of the ordinates of foot of three concurrent normal is zero.
I. Pair of Tangents : SS1 = T2
J. Chord of contact :(1) The equation of chord of contact of tangents drawn from a point (x1, y1) to the
parabola y2 = 4ax is yy1 = 2a (x + x1)
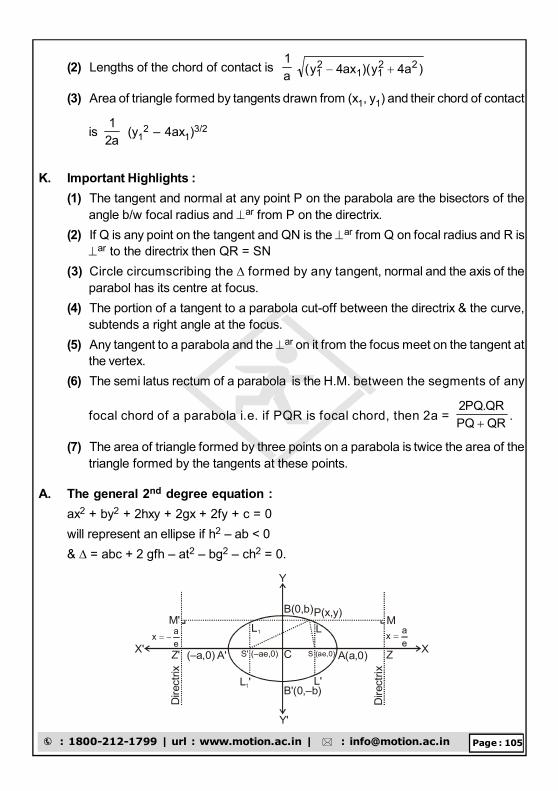
Page : 105 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(2) Lengths of the chord of contact is a1
)a4y)(ax4y( 2211
21
(3) Area of triangle formed by tangents drawn from (x1, y1) and their chord of contact
is a21
(y12 – 4ax1)3/2
K. Important Highlights :(1) The tangent and normal at any point P on the parabola are the bisectors of the
angle b/w focal radius and ar from P on the directrix.(2) If Q is any point on the tangent and QN is the ar from Q on focal radius and R is
ar to the directrix then QR = SN(3) Circle circumscribing the formed by any tangent, normal and the axis of the
parabol has its centre at focus.(4) The portion of a tangent to a parabola cut-off between the directrix & the curve,
subtends a right angle at the focus.(5) Any tangent to a parabola and the ar on it from the focus meet on the tangent at
the vertex.(6) The semi latus rectum of a parabola is the H.M. between the segments of any
focal chord of a parabola i.e. if PQR is focal chord, then 2a = QRPQQR.PQ2
.
(7) The area of triangle formed by three points on a parabola is twice the area of thetriangle formed by the tangents at these points.
A. The general 2nd degree equation :ax2 + by2 + 2hxy + 2gx + 2fy + c = 0will represent an ellipse if h2 – ab < 0& = abc + 2 gfh – at2 – bg2 – ch2 = 0.
(–a,0) A'
L1
L '1 L'
L
B(0,b)P(x,y)
S' (–ae,0) S (ae,0)
M' M
A(a,0)
B'(0,–b)
C
Y'
Y
XX' Z' Z
Dire
ctrix
Dire
ctrix
eax
eax

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 106
B. Standard form of the equation of ellipse
2
2xa
+ 2
2yb
= 1 :
(1) Length of major axis = 2a(2) Length of minor axis = 2b
(3) Directrix : x = ea
and x = – ea
(4) Focus : S (ae, 0) & S (–ae, 0)
(5) Length of Latus rectum = ab2 2
= 2a(1 – e2)
= 2e (distance b/w directrix & corresponding focus
(6) Ecentricity : e2 = 1 – 2
2
ab
B. Parametric form of ellipse : The equation of ellipse in the parametric formwill be given by x = a cos , y b sin
C. Condition of tangency : The line y = mx + c touches the ellipse 2
2
ax
+ 2
2
by
= 1, if
c = ± 222 bma
D. Equation of the tangent :(1) The equation of the tangent at any point (x1, y1) on the ellipse
2
2xa
+ 2
2yb
= 1 : 21
axx
+ 21
byy
= 1
(2) The equation of tangent at any point P() : ax
cos + by
sin = 1.
(3) Slope Form : y = mx ± 222 bma and its point of contact is
= 2 2
2 2 2 2 2 2
a m b,a m b a m b

Page : 107 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(4) Director Circle : The equation of the director circle of the ellipse 2
2
ax
+ 2
2
by
= 1
is x2 + y2 = a2 + b2
(5) Point of intersection of the tangent at the point P() and Q() is :
x =
2cos
2cosa
; y =
2cos
2sinb
E. Equation of the Normal :(1) The equation of the normal at any point (x1, y1) on the ellipse
2
2xa
+ 2
2yb
= 1 : 1
2
xxa
– 1
2
yyb
= a2 – b2 = a2e2
(2) The equation of the normal at any point P(): ax sec – by cosec = a2 – b2
F. The equation of the chord of the ellipse
2
2xa
+ 2
2yb
= 1, with given middle point : T = S1
G. The equation of the chord of contact :
T = 0 or 21
axx
+ 21
byy
= 1 (at x1, y1)
H. Pair of tangents : SS1 = T2
I . Equation of chord joining P() and Q( ) :
ax
cos
2 + by
sin
2 = cos 2
J. Highlight on ellipse :(1) If P be any point on the ellipse with F1 & F2 as its focii PF1 + PF2 = 2a

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 108
(2) (a) The product of the length of the ar segments from the focii on any tangent tothe ellipse is b2
(b) Feet of this perpendicular lies on its auxiliary circle.(3) The tangent and normal at a point P on the ellipse bisect the external and
internal angle between the focal distance of point P(4) A circle on any distance as diameter touches the auxiliary circle
A. The general 2nd degree equation :ax2 + by2 + 2hxy + 2gx + 2fy + c = 0will represent an hyperbola if h2 – ab > 0& = abc + 2 gfh – at2 – bg2 – ch2 0.
B. Standard form of the equation of ellipse
2
2xa
– 2
2yb
= 1 :
x
L'
L
(ae, –b /a)2
x = (ae, b /a)2
c (0, 0) A(a, 0)
S (ae,0)
A'(–a, 0)
S'(–ae, 0)
(0,–b) B'
B(0, b)
y
eax
eax
(1) Length of transverse axis (T. A.) =2a(2) Length of conjugate axis (C. A.) = 2b(3) Directrix : x = a/e and x = – a/e(4) Focus : S (ae, 0) and S (–ae, 0)
(5) Length of Latus Rectum = ab2 2
(6) Eccentricity : e2 = 1 + 2
2
ab
= 1 + 2
2
.)A.T(
.)A.C(
C. Conjugate Hyperbola :
(1) The equation of the conjugate hyperbola of 2
2
ax
– 2
2
by
= 1 is 2
2
ax
– 2
2
by
= –1

Page : 109 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(2) If e1 and e2 are the eccentricity of the hyperbola and its conjugate then 1e1
e1
22
21
D. Parametric form of hyperbola : The equation of hyperbola in the parametric formwill be given by x = a sec , y = b tan
E. Condition of tangency : The line y = mx + c touches the hyperbola 2
2
ax
– 2
2
by
= 1,
if c = ± 222 bma
F. Equation of tangent :(1) Cartesian form : The equation of the tangent at any point P(x1, y1) on the hyperbola
2
2
ax
– 2
2
by
= 1 is T = 0 or 21
axx
– 21
byy
= 1.
(2) Parametric form : Equation of tangent to the hyperbola 2
2
ax
– 2
2
by
= 1 at the
point P(a sec, b tan ) is ax
sec – by
tan = 1
(3) Slope form : y = mx ± 222 bma and the point of contact is
222
2
222
2
bma
b,bma
ma
(4) Director circle : The equation of the director circle is x2 + y2 = a2 – b2
G. Equation of the normal :
(1) Cartesian form : The ellipse of normal to the hyperbola 2
2
ax
– 2
2
by
= 1 at
P(x1, y1) is 1
2
xxa
+ 2
1
b yy = a2 + b2 = a2e2.

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 110
(2) Parametric form : The equation of normal at P(a sec, b tan ) to the hyperbola
2
2
ax
– 2
2
by
= 1 is ax cos + by cot = a2 + b2
H. Pair of tangents : SS1 = T2
I. Chord of contact : T = 0 (at x1, y1)
J. Equation of the chord with given middle point : T = S1
K. Asymptotes :Equation of the asymptotes of hyperbolas
2
2
ax
– 2
2
by
=1 and 2
2
ax
– 2
2
by
= –1 are y = ± ab
x
L. Important Highlight :(1) From any point on the asymptotes a straight line is drawn ar to the transverse
axis. The products of the segments of this line intercepted between the point &the curve is always equal to the square of the semi conjugate axis.
(2) Perpendicular from the focii on the asymptotes meet it is the same points as thecorresponding directrix and the common point of the intersection lie on the auxiliarycircle.
M. Rectangular hyperbola :Referred to its asymptotes as coordinates axisGeneral equation : xy = c2
Eccentricity : 2
Focus F1 : ( 2 c, 2 c) ; F2 : (– 2 c, – 2 c)
N. Parametric form of rectangular hyperbola :x = ct, y = c/t ; t R – {0}

Page : 111 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
O. Equation of tangent :(1) Cartesian from : P(x1, y1)
T = 0 or 2yy
xx
11
(2) Parametric form : P(ct, c/t)
tx
+ ty = 2c, slope of tangent = – 2t1
P. Equation of chord joining P(t1) and Q(t2) :x + t1t2 y = c(t1 + t2)
Q. Chord with given middle point P(x1, y1) :
T = S1 2yy
xx
11
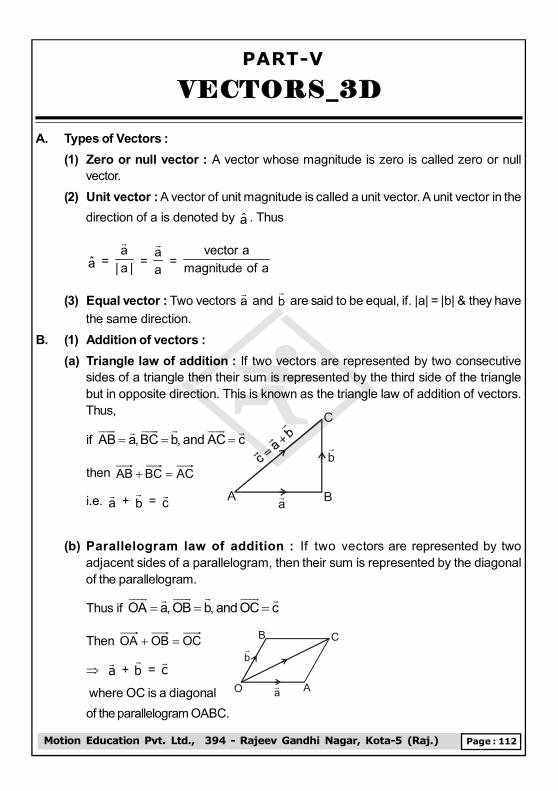
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 112
PART-V
VECTORS_3D
A. Types of Vectors :(1) Zero or null vector : A vector whose magnitude is zero is called zero or null
vector.(2) Unit vector : A vector of unit magnitude is called a unit vector. A unit vector in the
direction of a is denoted by a . Thus
a = |a|a
= aa
= aofmagnitudeavector
(3) Equal vector : Two vectors a
and b
are said to be equal, if. |a| = |b| & they havethe same direction.
B. (1) Addition of vectors :(a) Triangle law of addition : If two vectors are represented by two consecutive
sides of a triangle then their sum is represented by the third side of the trianglebut in opposite direction. This is known as the triangle law of addition of vectors.Thus,
if AB a,BC b, and AC c
then ACBCAB b
a BA
C
i.e. a + b
= c
(b) Parallelogram law of addition : If two vectors are represented by twoadjacent sides of a parallelogram, then their sum is represented by the diagonalof the parallelogram.
Thus if OA a, OB b, and OC c
Then OCOBOA B C
AO
b
a
a
+ b
= c
where OC is a diagonalof the parallelogram OABC.

Page : 113 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
(c) Addition in component form :
If a = a1 i + a2 j + a3 k and b
= b1 i + b2 j + b3 k then their sum is defined as
a + b
= (a1 + b1) i + (a2 + b2) j + (a3 + b3) k
(2) Subtraction of vectors : If a and b
are two vectors, then their subtraction
a – b
is defined as a
– b
= a + (– b
).where – b
is the negative of b
having
magnitude equal to that of b
and direction opposite to b
.
C. Vectors in terms of position vectors of end points:
If AB be any given vector and also suppose that the position vectors of initial point AA
and terminal point B are a and b
respectively, then abOAOBAB
D. Distance between two points :Let A and B be two given points whose coordinate are respectively (x1, y1, z1) and(x2, y2, z2)
Distance between the points A and B
= magnitude of AB = 212
212
212 )zz()yy()xx(
E. Multiplication of a vector by a scalar : If a
is a vector and m is scalar (i.e. a real
number) then m a
is a vector whose magnitude is m times that of a
and whose
direction is the same as that of a
, if m is positive and opposite to that of a , if m is
negative,
magnitude of m a
= m |a|
Again if kajaiaa 321 then
k)ma(j)ma(i)ma(am 321
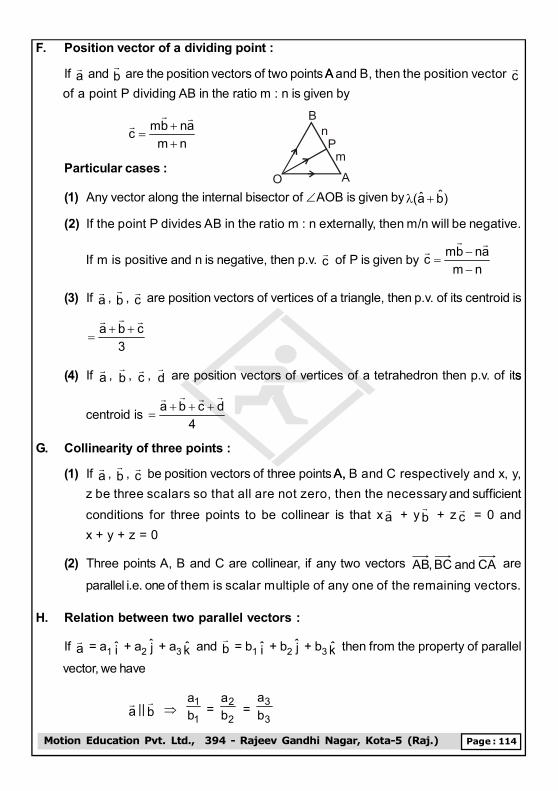
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 114
F. Position vector of a dividing point :
If a and b
are the position vectors of two points A A and B, then the position vector c
of a point P dividing AB in the ratio m : n is given by
nmanbmc
Particular cases :
B
AO
Pn
m
(1) Any vector along the internal bisector of AOB is given by )ba(
(2) If the point P divides AB in the ratio m : n externally, then m/n will be negative.
If m is positive and n is negative, then p.v. c of P is given by
nmanbmc
(3) If a , b
, c are position vectors of vertices of a triangle, then p.v. of its centroid is
a b c3
(4) If a , b
, c , d
are position vectors of vertices of a tetrahedron then p.v. of itss
centroid is 4
dcba
G. Collinearity of three points :
(1) If a , b
, c be position vectors of three points A, A, B and C respectively and x, y,
z be three scalars so that all are not zero, then the necessary and sufficientconditions for three points to be collinear is that x a
+ y b
+ z c = 0 and
x + y + z = 0
(2) Three points A, B and C are collinear, if any two vectors CAandBC,AB are
parallel i.e. one of them is scalar multiple of any one of the remaining vectors.
H. Relation between two parallel vectors :
If a = a1 i + a2 j + a3 k and b
= b1 i + b2 j + b3 k then from the property of parallel
vector, we have
a || b
1
1ba
= 2
2ba
= 3
3ba

Page : 115 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
I. Coplanar & non- coplanar vector :
(1) If a , b
, c be three coplanar vectors, then a vector c
can be expressed uniquely
as linear combination of remaining two vectors i.e. bac
. When and
are suitable scalars.
again bac
vectors a , b
and c are coplanar. If a
, b
, c be three
coplanar vectors, then there exist three non zero scalars x, y, z so that xa + yb
+ z c = 0
(2) If a , b
, c be three non coplanar non zero vector then xa
+ yb
+ z c = 0 x =
0, y = 0, z = 0
(3) Any vector r can be expressed uniquely as the linear combination of three non
coplanar and non-zero vectors a , b
and c i.e. czbyaxr
where x, y and
z are scalars.J. (1) Dot product : Product of two vectors is done by two methods when the product of
two vectors results in a scalar quantity then it is called scalar product. It is alsocalled as dot product because this product is represented by putting a dot (.).
(2) Vector product : When the product of two vectors results in a vector quantitythen this product is called Vector Product. This product is represented by (x)sign so that it is also called as Cross Product.
K. Scalar or dot product of two vectors :
a . b
= | a | | b
| cos = ab cos
Projection of b
on a = |a|
b.a
;
Similarly projection of a on b
= |b|
b.a
(1) i . i = j . j = k . k . = 1
(2) i . j = j . k = k . i = 0

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 116
(3) If a and b
are like vectors, then = 0 so a
. b
= | a | | b
|
(4) Properties of scalar product :
(a) ( a . b
) . b
is not defined
(b) ( a + b
)2 = a2 + 2 a . b
+ b2
(c) ( a – b
)2 = a2 – 2 a . b
+ b2
(d) ( a + b
) . ( a – b
) = a 2 – b
2 = a2 – b2
(e) | a + b
| = | a | + | b
| a
|| b
(f) | a + b
|2 = | a |2 + | b
|2 a b
(g) | a + b
| = | a – b
| a b
L. Angle between two vectors :
(1) cos = |b||a|b.a
= b.a
(2) If a = a1 i + a2 j + a3 k and b
= b1 i + b2 j + b3 k
then cos = 23
22
21
23
22
21
332211
bbbaaa
bababa
M. Components of b
along & perpendicular to a
:
(1) Component along a
= 2|a|)b.a(
. a
(2) Component perpendicular to a = b
– 2|a|
)b.a(
. a
N. Work done by the force : If a constant force F acting on a particle displaces
it from point A to B, then work done by the force W = f.d (where d = AB )

Page : 117 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
O. Vector or cross product of two vectors :
a × b
= | a
| | b
| sin n = ab sin n
P. Vector product in terms of components :
If a = a1 i + a2 j + a3 k and b
= b1 i + b2 j + b3 k then
a ×b
= (a2b3 – a3b2) i + (a3b1 – a1b3) j + (a1b2 – a2b1) k = 321321
bbbaaakji
Q. Angle between two vectors :If is the angle between a
and b
, then
sin = |b||a||ba|
If n is the unit vector perpendicular to the plane of a and b
, then n = |ba|
ba
Remark : If i , j , k be three mutually perpendicular unit vectors, then
(a) i × i = j × j = k × k = 0
(b) i × j = k , j × k = i , k × i = j
(c) j × i = – k , k × j = – i , i × k = – j
(d) If vector a
and b
are parallel then | a × b
| = 0
(e) If vector a and b
are perpendicular then | a
× b
| = | a | | b
|
R. Properties of vector product : If a , b
, c are any vectors and m, n any scalars then
(1) a × b
b
× a (Non-commutativity)
but a × b
= – ( b
× a ) and | a
× b
| = | b
× a |
(2) (m a ) × b
= a × (m b
) = m ( a
× b
)
(3) (m a ) × (nb
) = (mn) ( a
× b
)

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 118
(4) a × ( b
× c ) ( a
× b
) × c
(5) a × ( b
+ c ) = ( a
× b
) + ( a × c
) (Distributivity)
(6) a × b
= a × c
b
= c
S. Area of Triangle :
(1) Area of triangle ABC = 21
| AB × CA |
(2) If a , b
, c are position vectors of vertices of a ABC then itss
Area = 21
|( a × b
) + ( b
× c ) + ( c
× a )|
T. Area of parallelogram :(1) If a
and b
are two adjacent sides of a parallelogram then the area = |a × b
|
(2) If a and b
represent two diagonals of a parallelogram then the area =
21
|a × b
|
U. Moment of force : The moment of the force F acting at a point A about O is given by
Moment of F = OA × F = r × F
V. Formula for scalar triple product :(1) If a
= a1 + a2m + a3n, b
= b1 + b2m + b3n and c = c1 + c2m + c3n, then
[ a
b
c ] =
321321321
cccbbbaaa
= [mn]
(2) For any three vectors a , b
and c
(a) [ a + b
b
+ c c + a
] = 2[ a
b
c ]
(b) [ a – b
b
– c c – a
] = 0
(c) [ a × b
b
× c c × a
] = [ a
b
c ]2
W. Properties of scalar triple product :(1) The position of (.) and (×) can be interchanged i.e. a
. ( b
× c ) = ( a
× b
) . c
but ( a × b
) . c = c
.( a × b
)
So [ a
b
c ] = [ b
c
a ] = [ c
a
b
]

Page : 119 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
Therefore if we don't change the cyclic order of a , b
and c then the value of scalar
triple product is not changed by interchanging dot and cross.(2) If the cyclic order of vectors is changed, then sign of scalar triple product is
changed i.e.
a . [b
× c ] = – a
. (c × b
) or [a
b
c ] = –[a
c
b
]
from (1) and (2) we have
[ a
b
c ] = [ b
c
a ] = [ c
a
b
] = – [ a
c
b
] = – [ b
a
c ] = – [ c
b
a ]
(3) The scalar triple product of three vectors when two of them are equal or parallel,
is zero i.e. [ a
b
b
] = [ a
b
a ] = 0
(4) The scalar triple product of three mutually perpendicular unit vectors is ±1. Thus
[ kji ] = 1, [ i k j ] = –1
(5) If two of the three vectors a , b
, c are parallel then [ a
b
c ] = 0
(6) a , b
, c are three coplanar vectors if [a
b
c ] = 0 i.e. the necessary and sufficient
condition for three non-zero collinear vectors to be coplanar is [ a
b
c ] = 0
(7) For any vectors a , b
, c , d
[ a + b
c . d
] = [ a
c
d
] + [ b
c
d
]
X. Volume of parallelopiped : If coterminous edges of a parallelopiped are a , b
and c then volume = [ a
b
c ].
Y. Volume of tetrahedron :(1) If a
, b
, c are position vectors of vertices A, B and C with respect to O. then
volume of tetrahedron OABC = 61
[ a
b
c ]
(2) If a , b
, c , d
are position vectors of vertices A, B, C, D of a tetrahedron ABCD,then
its volume =
]adacab[61
or]ADACAB[
61

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 120
Z. Vector triple product :(1) Definition : The vector triple product of three vectors a
, b
, c is defined as
the vector product of two vectors a and b
× c . It is denoted by a
× ( b
× c ).
(2) Properties : Expansion formula for vector triple product is given by
a × ( b
× c ) = ( a
. c ) b
– ( a . b
) c
( b
× c ) × a
= ( b
. a ) c – ( c
. a ) b
A. Distance between two points : If P(x1, y1, z1) and Q(x2, y2, z2) are two points, then
distance between them PQ = 221
221
221 )zz()yy()xx(
B. Coordinates of division point : Coordinates of the point dividing the line joining twopoints P(x1, y1, z1) and Q(x2, y2, z2) in the ratio m : n are(1) In case of internal division :
2 1 2 1 2 1mx nx my ny mz nz, ,m n m n m n
(2) In case of external division :
2 1 2 1 2 1mx nx my ny mz nz, ,m n m n m n
Remark :(a) Coordinates of the midpoint :
2zz,
2yy,
2xx 212121
(b) Centroid of a Triangle :
2zzz,
3yyy,
3xxx 321321321
(c) Centroid of Tetrahedron : If (xr, yr, zr), r = 1, 2, 3, 4 are vertices of a tetrahedron, thencoordinates of its centroid are
4zzzz,
4yyyy,
4xxxx 432143214321

Page : 121 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
C. Direction Cosines of a line [DC's] :The cosines of the angles made by a line with coordinate axes are called directioncosines. If , , be the angles made by a line with coordinate axes, then directioncosines are = cos , m = cos , n = cos and relation between DC's is 2 + m2 + n2 = 1
D. Direction Ratios of a line [DR's] :Three numbers which are proportional to the direction cosines of a line are called the
direction ratios of the line. If a, b, c are such numbers then a, b, c DR's a
= mb
=
nc = ±
2 2 2
a
a b c ,
m = ± 222 cba
b
, n = ± 222 cba
c
E. Direction Cosines of a line joining two points :Let P (x1, y1, z1) and Q (x2, y2, z2), then(1) DR's of PQ : (x2 – x1), (y2 – y1), (z2 – z1)
(2) DC's of PQ : PQxx 12 , PQ
yy 12 , PQzz 12
i.e. 2
12
12
)xx(
xx
,2
12
12
)xx(
yy
,2
12
12
)xx(
zz
F. Angles between two lines :(1) When direction cosines of the lines are given: If 1, m1, n1 and 2, m2, n2 are
DC's of given two lines, then the angle between them in given by(a) cos = 12 + m1m2 + n1n2
(b) sin = 21221
21221
21221 )nn()nmnm()mm(
(2) When direction ratios of the lines are given:If a1, b1, c1 and a2, b2, c2 are DR's of given two lines, then the angle betweenthem is given by
(a) cos =
Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 122
(b) sin =
G. Conditions of parallelism and perpendicularity of two lines :(1) When DC's of two lines AB and CD say 1, m1, n1 and 1, m2, n2 are known, then
AB || CD 1 = 2, m1 = m2, n1 = n2AB ar CD 12 + m1m2 + n1n2 = 0
(2) When DR's of two lines AB & CD say a1, b1, c1 and a2, b2, c2 are known, then
AB || CD = =
AB CD a1a2 + b1b2 + c1c2 = 0
H. Projection of line segment joining two points on a line :(1) Let PQ be a line segment where P (x1, y1, z1) and Q (x2, y2, z2) and AB be
a given line with DC's as , m, n. Then projection of PQ isPQ = (x2 – x1) + m (y2 – y1) + n(z2 – z1)
(2) If a, b, c are the projections of a line segment on coordinate axes, then length ofthe segment
=
(3) If a, b, c are projections of a line segment on coordinate axes then its DC's are
± ± ±
I. Cartesian equation of a line passing through a given point & given directionratios :Cartesian equation of a straight line passing through a fixed point (x1, y1, z1) and
having direction ratios a, b, c is = =
J. Cartesian equation of a line passing through two given points : The Cartesianequation of a line passing through two given points (x1, y1, z1) and (x2, y2, z2) is given
by = =

Page : 123 : 1800-212-1799 | url : www.motion.ac.in | : [email protected]
K. Perpendicular distance of a point from a line :Cartesian from : To find the perpendicular distance of a given point (, , ) from agiven line
AB : = =
Let L be the foot of the perpendicular drawn from P (, , ) on the line =
=
Let the coordinates of L be (x1 + a, y1 + b, z1 + c).Then direction ratios of PL are x1 + a – ,y1 + b –, z1 + c – .Direction Ratio of AB are a, b, c. Since PL is perpendicular to AB, therefore(x1 + a – ) a + (y1 + b – ) b + (z1 + c – ) c = 0
=
Putting this value of in (x1 + a, y1 + b, z1 + c), we obtain coordinates of L. Now,using distance formula we can obtain the length PL.
L. Plane :(1) General equation of a plane : ax + by + cz + d = 0(2) Equation of a plane passing through a given point. The general equation of a plane
passing through a point (x1, y1, z1) isa(x – x1) + b(y – y1) + c(z – z1) = 0
where a, b and c are constants.(3) Intercept form of a plane : The equation of a plane intercepting lengths a, b
and c with x-axis, y-axis and z-axis respectively a + + = 1
(4) Normal form : If , m, n are direction cosines of the normal to a given planewhich is at a distance p from the origin, then the equation of the plane is x + my+ nz = p.
M. Angle between two planes in Cartesian form :The angle between the planes a1x + b1y + c1z + d1 = 0 and a1x + b2y + c2z + d2 = 0 isgiven by

Motion Education Pvt. Ltd., 394 - Rajeev Gandhi Nagar, Kota-5 (Raj.) Page : 124
cos = 22
22
22
21
21
21
212121
cbacba
ccbbaa
N. Distance of a point from a plane :The length of the perpendicular from a point P (x1, y1, z1) to the plane ax + by + cz
+ d = 0 is given by 222111
cba
|dczbyax|
O. Equation of plane bisecting the angle between two given planes :The equation of the planes bisecting the angles between the planes a1x + b1y +c1z + d1 = 0 and a2x + b2y + c2z + d2 = 0 are
21
21
21
1111
cba
)dzcybxa(
= ±
22
22
22
2221
cba
)dzcybxa(
P. Condition of coplanarity of two lines :
If the line 1
1xx
= 1
1m
yy =
1
1n
zz and
1
2xx
= 2
2m
yy =
2
2n
zz are coplanar,,
then 2 1 2 1 2 1
1 1 12 2 2
x x y y z zm nm n
= 0
Related Documents











