Mathematics of Infrastructure Planning ZIB Optimization Suite Stefan Heinz Zuse Institute Berlin (ZIB) DFG Research Center MATHEON Mathematics for key technologies 16/April/2012

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Mathematics of InfrastructurePlanning
ZIB Optimization Suite
Stefan HeinzZuse Institute Berlin (ZIB)
DFG Research Center MATHEON
Mathematics for key technologies
16/April/2012

ZIB Optimization Suite = SCIP + SoPlex + ZIMPL
Toolbox for generating and solving constraint integer programs
ZIMPL. a mixed integer programming modeling language
. easily generate LPs, MIPs, and ...
SCIP. a MIP and CP solver, branch-cut-and-price framework
. ZIMPL models can directly be loaded into SCIP and solved
SoPlex. a linear programming solver
. SCIP uses SoPlex as underlying LP solver
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 1 / 22

ZIMPL + SoPlex
ZIMPL – Modeling Language
. distinguish between data and model
. easily generate LPs, MIPs, and ...
. fast prototyping
. http://zimpl.zib.de
. AIMMS, AMPL, GAMS, MOSEL, OPL, . . .
SoPlex – Linear Programming Solver
. dual and primal simplex
. has a warm start
. http://soplex.zib.de
. CLP, CPLEX, GUROBI, MOSEK, XPRESS, . . .
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 2 / 22

SCIP
SCIP is a framework for Constraint Integer Programming orientedtowards the needs of Mathematical Programming experts who wantto have total control of the solution process and access detailedinformation down to the guts of the solver.
. framework to solve constraint integer programs
. branch-and-bound framework
. branch-and-cut framework
. branch-and-propagate framework
. branch-and-price framework
. black box MIP solver
. http://scip.zib.de
. CBC, CPLEX, GUROBI, MOSEK, XPRESS, . . .
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 3 / 22

An example: the Traveling Salesman Problem
Definition (TSP)
Given a complete graphG = (V ,E ) and distances defor all e ∈ E :
Find a Hamiltonian cycle(cycle containing all nodes,tour) of minimum length.
K8
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 4 / 22

An example: the Traveling Salesman Problem
Definition (TSP)
Given a complete graphG = (V ,E ) and distances defor all e ∈ E :
Find a Hamiltonian cycle(cycle containing all nodes,tour) of minimum length.
K8
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 4 / 22

An example: the Traveling Salesman Problem
Definition (TSP)
Given a complete graphG = (V ,E ) and distances defor all e ∈ E :
Find a Hamiltonian cycle(cycle containing all nodes,tour) of minimum length.
(n−1)!2
possible solutions: finite, but enumeration intractable!
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 4 / 22

TSP world record
by Bill Cook et al.
The largest solved instance of the traveling salesman problem consists of a tourthrough 85,900 cities in a VLSI application that arose in Bell Laboratories in thelate 1980s.
The total amount of computer usage for the computations was appx. 136 CPU
years.Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 5 / 22

What is a Constraint Integer Program?
Mixed Integer Program
Objective function:
. linear function
Feasible set:
. described by linear constraints
Variable domains:
. real or integer values
min cT x
s.t. Ax ≤ b
(xI , xC ) ∈ ZI ×RC
Constraint Program
Objective function:
. arbitrary function
Feasible set:
. given by arbitrary constraints
Variable domains:
. arbitrary (usually finite)
min c(x)
s.t. x ∈ F
(xI , xN) ∈ ZI × X
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 6 / 22

TSP – Integer Programming FormulationGiven
. complete graph G = (V ,E )
. distances de > 0 for all e ∈ E
Binary variables
. xe = 1 if edge e is used
xe
K8
min∑e∈E
de xe
subject to∑
e∈δ(v)
xe = 2 ∀v ∈ V
∑e∈δ(S)
xe ≥ 2 ∀S ⊂ V , S 6= ∅
xe ∈ {0, 1} ∀e ∈ E
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 7 / 22

TSP – Integer Programming FormulationGiven
. complete graph G = (V ,E )
. distances de > 0 for all e ∈ E
Binary variables
. xe = 1 if edge e is used
xe
K8
min∑e∈E
de xe
subject to∑
e∈δ(v)
xe = 2 ∀v ∈ V
∑e∈δ(S)
xe ≥ 2 ∀S ⊂ V , S 6= ∅
xe ∈ {0, 1} ∀e ∈ E
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 7 / 22

TSP – Integer Programming FormulationGiven
. complete graph G = (V ,E )
. distances de > 0 for all e ∈ E
Binary variables
. xe = 1 if edge e is used
xe
K8
min∑e∈E
de xe
subject to∑
e∈δ(v)
xe = 2 ∀v ∈ V
∑e∈δ(S)
xe ≥ 2 ∀S ⊂ V , S 6= ∅
xe ∈ {0, 1} ∀e ∈ E
node degree
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 7 / 22

TSP – Integer Programming FormulationGiven
. complete graph G = (V ,E )
. distances de > 0 for all e ∈ E
Binary variables
. xe = 1 if edge e is used
xe
K8
min∑e∈E
de xe
subject to∑
e∈δ(v)
xe = 2 ∀v ∈ V
∑e∈δ(S)
xe ≥ 2 ∀S ⊂ V , S 6= ∅
xe ∈ {0, 1} ∀e ∈ E
subtour elimination
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 7 / 22

TSP – Integer Programming FormulationGiven
. complete graph G = (V ,E )
. distances de > 0 for all e ∈ E
Binary variables
. xe = 1 if edge e is used
xe
K8
min∑e∈E
de xe
subject to∑
e∈δ(v)
xe = 2 ∀v ∈ V
∑e∈δ(S)
xe ≥ 2 ∀S ⊂ V , S 6= ∅
xe ∈ {0, 1} ∀e ∈ E
distance
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 7 / 22

TSP – Integer Programming FormulationGiven
. complete graph G = (V ,E )
. distances de > 0 for all e ∈ E
Binary variables
. xe = 1 if edge e is used
min∑e∈E
de xe
subject to∑
e∈δ(v)
xe = 2 ∀v ∈ V
∑e∈δ(S)
xe ≥ 2 ∀S ⊂ V , S 6= ∅
xe ∈ {0, 1} ∀e ∈ E
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 7 / 22

TSP – Integer Programming FormulationGiven
. complete graph G = (V ,E )
. distances de > 0 for all e ∈ E
Binary variables
. xe = 1 if edge e is used
min∑e∈E
de xe
subject to∑
e∈δ(v)
xe = 2 ∀v ∈ V
∑e∈δ(S)
xe ≥ 2 ∀S ⊂ V , S 6= ∅
xe ∈ {0, 1} ∀e ∈ E
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 7 / 22

TSP – Constraint Programming Formulation
Given
. complete graph G = (V ,E )
. for each e ∈ E a distancede > 0
Integer variables
. xv position of v ∈ V in tour
xv
K8
1
2
3
45
6
78
min length(x1, . . . , xn)
subject to alldifferent(x1, . . . , xn)
xv ∈ {1, . . . , n} ∀v ∈ V
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 8 / 22

TSP – Constraint Programming Formulation
Given
. complete graph G = (V ,E )
. for each e ∈ E a distancede > 0
Integer variables
. xv position of v ∈ V in tour
xv
K8
1
2
3
45
6
78
min length(x1, . . . , xn)
subject to alldifferent(x1, . . . , xn)
xv ∈ {1, . . . , n} ∀v ∈ V
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 8 / 22

What is a Constraint Integer Program?
Constraint Integer Program
Objective function:
. linear function
Feasible set:
. described by arbitrary constraints
Variable domains:
. real or integer values
After fixing all integer variables:
. CIP becomes an LP
min cT x
s.t. x ∈ F
(xI , xC ) ∈ ZI ×RC
Remark:
. arbitrary objective orvariables modeled byconstraints
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 9 / 22

What is a Constraint Integer Program?
Constraint Integer Program
Objective function:
. linear function
Feasible set:
. described by arbitrary constraints
Variable domains:
. real or integer values
After fixing all integer variables:
. CIP becomes an LP
min∑e∈E
de xe
s.t.∑
e∈δ(v)
xe = 2 ∀ v ∈ V
nosubtour(x)xe ∈ {0, 1} ∀ e ∈ E
(CIP formulation of TSP)
Single nosubtour constraintrules out subtours (e.g. by do-main propagation). It may alsoseparate subtour eliminationinequalities.
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 9 / 22

Constraint Integer Programming
. Mixed Integer Programs
. SATisfiability problems
. Pseudo-Boolean Optimization
. Finite Domain
. Constraint Programming
. Constraint Integer Programming
CP
CIP
FDPBO
MIP
SAT
Relation to CP and MIP
. Every MIP is a CIP. “MIP ( CIP”
. Every CP over a finite domain space is a CIP. “FD ( CIP”
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 10 / 22

Constraint Integer Programming
. Mixed Integer Programs
. SATisfiability problems
. Pseudo-Boolean Optimization
. Finite Domain
. Constraint Programming
. Constraint Integer Programming
CP
CIP
FDPBO
MIP
SAT
Relation to CP and MIP
. Every MIP is a CIP. “MIP ( CIP”
. Every CP over a finite domain space is a CIP. “FD ( CIP”
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 10 / 22

Constraint Integer Programming
. Mixed Integer Programs
. SATisfiability problems
. Pseudo-Boolean Optimization
. Finite Domain
. Constraint Programming
. Constraint Integer Programming
CP
CIP
FD
PBO
MIP
SAT
Relation to CP and MIP
. Every MIP is a CIP. “MIP ( CIP”
. Every CP over a finite domain space is a CIP. “FD ( CIP”
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 10 / 22

Constraint Integer Programming
. Mixed Integer Programs
. SATisfiability problems
. Pseudo-Boolean Optimization
. Finite Domain
. Constraint Programming
. Constraint Integer Programming
CP
CIP
FDPBO
MIP
SAT
Relation to CP and MIP
. Every MIP is a CIP. “MIP ( CIP”
. Every CP over a finite domain space is a CIP. “FD ( CIP”
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 10 / 22

Constraint Integer Programming
. Mixed Integer Programs
. SATisfiability problems
. Pseudo-Boolean Optimization
. Finite Domain
. Constraint Programming
. Constraint Integer Programming
CP
CIP
FDPBO
MIP
SAT
Relation to CP and MIP
. Every MIP is a CIP. “MIP ( CIP”
. Every CP over a finite domain space is a CIP. “FD ( CIP”
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 10 / 22

Constraint Integer Programming
. Mixed Integer Programs
. SATisfiability problems
. Pseudo-Boolean Optimization
. Finite Domain
. Constraint Programming
. Constraint Integer Programming
CP
CIP
FDPBO
MIP
SAT
Relation to CP and MIP
. Every MIP is a CIP. “MIP ( CIP”
. Every CP over a finite domain space is a CIP. “FD ( CIP”
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 10 / 22

How do we solve CIPs?
MIP
. LP relaxation
. cutting planes
CP
. domain propagation
SAT
. conflict analysis
. periodic restarts
MIP, CP, and SAT
. branch-and-bound
SCIP
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 11 / 22

What is SCIP?
SCIP (Solving Constraint Integer Programs) . . .
. is a branch-cut-and-price framework,
. is constraint based,
. incorporatesI CP features (domain propagation),I MIP features (cutting planes, LP relaxation), andI SAT-solving features (conflict analysis, restarts),
. has a modular structure via plugins,
. provides a full-scale MIP solver,
. is free for academic purposes,
. and is available in source-code under http://scip.zib.de !
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 12 / 22

Structure of SCIP
SCIP PrimalHeuristic
actconsdiving
coefdiving
crossover dins
feaspump
fixandinfer
fracdiving
guideddiving
intdiving
intshifting
linesearchdiving
localbranching
mutation
subnlp
objpscostdiving
octane
oneopt
pscostdiving
rensrins
rootsoldiving
rounding
shifting
shift&prop
simplerounding
trivial
trysol
twooptundercover
veclendiving
zi round
Variable
Event
default
Branch
allfullstrong
fullstrong
inference
leastinf
mostinf
pscostrandom
relpscost
Conflict
ConstraintHandler
and
bounddisjunc.
countsols cumu
lative
indicator
integral
knapsack
linear
linking
logicor
ororbitope
quadratic
setppc
soc
sos1
sos2
varbound
xor
Cutpool
LP
clp
cpxmsk
none
qso
spx
xprs
Dialog
default
Display
default
Nodeselector
bfs
dfs
estimate
hybridestim
restartdfs
· · ·
Presolver
boundshift
dualfix
implics
inttobinary
probing
trivial
Implications
Tree
Reader
ccg
cip
cnf
fix
lp
mps opb
ppm
rlp
sol
sos
zpl
Pricer
Separator
clique
cmir
flowcover
gomory
impliedbounds intobj
mcf
oddcycle
rapidlearn
redcost
strongcg
zerohalf
Propagator
pseudoobj
rootredcost
vbound
Relax
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 13 / 22

Structure of SCIP
SCIP PrimalHeuristic
actconsdiving
coefdiving
crossover dins
feaspump
fixandinfer
fracdiving
guideddiving
intdiving
intshifting
linesearchdiving
localbranching
mutation
subnlp
objpscostdiving
octane
oneopt
pscostdiving
rensrins
rootsoldiving
rounding
shifting
shift&prop
simplerounding
trivial
trysol
twooptundercover
veclendiving
default
Variable
Event
default
Branch
allfullstrong
fullstrong
inference
leastinf
mostinf
pscostrandom
relpscost
Conflict
ConstraintHandler
and
bounddisjunc.
countsols cumu
lative
indicator
integral
knapsack
linear
linking
logicor
ororbitope
quadratic
setppc
soc
sos1
sos2
varbound
default
Cutpool
LP
clp
cpxmsk
none
qso
spx
default
Dialog
default
Display
default
Nodeselector
bfs
dfs
estimate
hybridestim
default
· · ·
Presolver
boundshift
dualfix
implics
inttobinary
probing
default
Implications
Tree
Reader
ccg
cip
cnf
fix
lp
mps opb
ppm
rlp
sol
sos
default
Pricer
Separator
clique
cmir
flowcover
gomory
impliedbounds intobj
mcf
oddcycle
rapidlearn
redcost
strongcgdefault
Propagator
pseudoobj
rootredcost
default
Relax
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 13 / 22

Structure of SCIP
SCIP PrimalHeuristic
actconsdiving
coefdiving
crossover dins
feaspump
fixandinfer
fracdiving
guideddiving
intdiving
intshifting
linesearchdiving
localbranching
mutation
subnlp
objpscostdiving
octane
oneopt
pscostdiving
rensrins
rootsoldiving
rounding
shifting
shift&prop
simplerounding
trivial
trysol
twooptundercover
veclendiving
zi round
Variable
Event
default
Branch
allfullstrong
fullstrong
inference
leastinf
mostinf
pscostrandom
relpscost
Conflict
ConstraintHandler
and
bounddisjunc.
countsols cumu
lative
indicator
integral
knapsack
linear
linking
logicor
ororbitope
quadratic
setppc
soc
sos1
sos2
varbound
xor
Cutpool
LP
clp
cpxmsk
none
qso
spx
xprs
Dialog
default
Display
default
Nodeselector
bfs
dfs
estimate
hybridestim
restartdfs
· · ·
Presolver
boundshift
dualfix
implics
inttobinary
probing
trivial
Implications
Tree
Reader
ccg
cip
cnf
fix
lp
mps opb
ppm
rlp
sol
sos
zpl
Pricer
Separator
clique
cmir
flowcover
gomory
impliedbounds intobj
mcf
oddcycle
rapidlearn
redcost
strongcg
zerohalf
Propagator
pseudoobj
rootredcost
vbound
Relax
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 13 / 22

History of SCIP
1998 SIP – Solving Integer Programs (Alexander Martin)
10/2002 Start of SCIP development (Tobias Achterberg)
02/2003 First version to solve MIPs
09/2005 First public version 0.80
09/2006 Version 0.90
07/2007 Tobias Achterberg left the SCIP developer team
09/2007 Version 1.00
09/2007 Part of the ZIB Optimization Suite
09/2008 Version 1.1.0
10/2008 Nonlinear support
09/2009 Version 1.2.0
05/2010 First global constraints
09/2010 Version 2.0
10/2012 Version 2.1
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 14 / 22

Number of Default Plugins
SCIP version
plugin type 0.7 0.8 0.9 1.0 1.1 1.2 2.0 2.1
branching rules 6 7 8 8 8 8 8 8constraint handlers 10 10 11 11 14 16 23 25node selectors 3 7 3 5 5 5 5 5presolvers 2 7 5 5 6 6 6 5primal heuristics 9 14 21 23 24 27 32 33propagators 0 1 2 2 2 2 3 5readers 2 4 6 6 11 13 15 16separators 3 6 7 8 10 10 12 13
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 15 / 22

Involved Persons
. Thorsten Koch
. Marc Pfetsch (TU Darmstadt)
. Timo Berthold
. Gerald Gamrath
. Ambros Gleixner
. Stefan Heinz
. Yuji Shinano
. Stefan Vigerske
. Kati Wolter
. Gregor Hendel
. Michael Winkler
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 16 / 22

SCIP Facts
. more than 300 000 lines of C code→ 18% documentation→ 20% assertions
. 7 examples illustrating the use of SCIP
. HowTos: each plugin type, debugging, automatic testing, . . .
. C++ wrapper classes, (experimental) python interface
. 7 interfaces to external linear programming solvers→ CLP, CPLEX, Gurobi, Mosek, QSopt, SoPlex, XPRESS
. 10 different input formats→ cip, cnf, flatzinc, rlp, lp, mps, opb, pip, wbo, zimpl
. more than 1000 parameters, 15 “emphasis” settings
. active mailing list
. runs on Linux, Windows, Mac (Darwin+PPC), SunOS, . . .
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 17 / 22

SCIP App
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 18 / 22

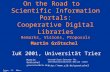
Computational results
. fastest non-commercial MIP solver
0
1000
2000
3000
tim
ein
seco
nd
s
non-commercial commercial4.10x 3.60x
1.74x
1.20x 1.00x0.70x
0.27x 0.24x 0.19x
solved(of 87 instances)
3 5 41 52 57 63 73 74 77
GLPK 4.47lpsolve 5.5.2CBC 2.7.4SCIP 2.1.1 – CLP 1.14.3SCIP 2.1.1 – SoPlex 1.6SCIP 2.1.1 – Cplex 12.3Cplex 12.4Xpress 7.2.1Gurobi 4.6.1
results by H. Mittelmann (9/Jan/2012)
3.8x
2.8x 2.8x 2.3x
1.9x1.5x
1.2x1.0x
solved(of 87)
23 36 29 48 51 58 63 670
1000
2000
3000
4000
tim
ein
seco
nd
s
SCIP 0.7 – SoPlex 1.2.2
SCIP 0.80 – SoPlex 1.2.2
SCIP 0.90 – SoPlex 1.3.0
SCIP 1.00 – SoPlex 1.3.2
SCIP 1.1 – SoPlex 1.4.0
SCIP 1.2 – SoPlex 1.4.2
SCIP 2.0 – SoPlex 1.5.0
SCIP 2.1 – SoPlex 1.6.0
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 19 / 22

Outreach
Some universities and institutes using the ZIB Optimization Suite:
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 20 / 22

ZIB Optimization Suite = SCIP + SoPlex + ZIMPL
Linux and Mac users
. download the ZIB Optimization Suite 2.0.1http://zibopt.zib.de
. read the INSTALL
I tar xvf ziboptsuite-2.0.1.tgzI cd ziboptsuite-2.0.1I makeI make test
. requirements: readline and zlib
. you can also use the virtual machine (see next slide)
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 21 / 22

ZIB Optimization Suite = SCIP + SoPlex + ZIMPL
Windows user
. download the virtual machine (VM) form the course web page
I CIPvmware.zip (Attention 2,7 GB)I >1 GB main memoryI 5–8 GB disk space
. follow the instruction stated in the README.txt
I download the VMware Player (free software)I load the VM into the VMware PlayerI power on the VM
. ZIB Optimization Suite is already installed
. Eclipse, emacs, LATEX, JAVA, Kate, Kile, . . .
Stefan Heinz (ZIB) – Mathematics of Infrastructure Planning 22 / 22

Mathematics of InfrastructurePlanning
ZIB Optimization Suite
Stefan HeinzZuse Institute Berlin (ZIB)
DFG Research Center MATHEON
Mathematics for key technologies
16/April/2012
Related Documents