[ Assignment View ] Class PHYSICS110SPRING2007 Chapter 13 Assignment is due at 11:00am on Monday, May 21, 2007 Credit for problems submitted late will decrease to 0% over the course of 12 hour(s) after the deadline has passed. There is no penalty for wrong answers to free response questions. Multiple choice questions are penalized as described in the online help. The unopened hint bonus is 2% per part. You are allowed 4 attempts per answer. Angular Motion with Constant Acceleration Learning Goal: To understand the meaning of the variables that appear in the equations for rotational kinematics with constant angular acceleration. Rotational motion with a constant nonzero acceleration is not uncommon in the world around us. For instance, many machines have spinning parts. When the machine is turned on or off, the spinning parts tend to change the rate of their rotation with virtually constant angular acceleration. Many introductory problems in rotational kinematics involve motion of a particle with constant nonzero angular acceleration. The kinematic equations for such motion can be written as and . Here, the meaning of the symbols is as follows: is the angular position of the particle. is the initial angular position of the particle. is the angular velocity of the particle. is the initial angular velocity of the particle. is the angular acceleration of the particle. In answering the following questions, assume that the angular acceleration is constant and nonzero: . Part A

masteringphys13
Nov 15, 2014
This is Physics 110 homework online using mastering Physics. It corresponds to general physics and it ha the answers for practice
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

[ Assignment View ]
Class PHYSICS110SPRING2007
Chapter 13
Assignment is due at 11:00am on Monday, May 21, 2007
Credit for problems submitted late will decrease to 0% over the course of 12 hour(s) after the deadline has passed.There is no penalty for wrong answers to free response questions. Multiple choice questions are penalized as described in the online help.The unopened hint bonus is 2% per part.You are allowed 4 attempts per answer.
Angular Motion with Constant Acceleration
Learning Goal: To understand the meaning of the variables that appear in the equations for rotational kinematics with constant angular acceleration.
Rotational motion with a constant nonzero acceleration is not uncommon in the world around us. For instance, many machines have spinning parts. When the machine is turned on or off, the spinning parts tend to change the rate of their rotation with virtually constant angular acceleration. Many introductory problems in rotational kinematics involve motion of a particle with constant nonzero angular
acceleration. The kinematic equations for such motion can be written as and
. Here, the meaning of the symbols is as follows:
is the angular position of the particle.
is the initial angular position of the particle.
is the angular velocity of the particle. is the initial angular velocity of the particle. is the angular acceleration of the particle.
In answering the following questions, assume that the angular acceleration is constant and nonzero:
.Part A
True or false: The quantity represented by is a function of time (i.e., is not constant).
ANSWER:
true
false
Part B

True or false: The quantity represented by is a function of time (i.e., is not constant).
ANSWER:
true
false
Keep in mind that represents an initial value, not a variable. It refers to the angular position of an object at some initial moment.
Part C
True or false: The quantity represented by is a function of time (i.e., is not constant).
ANSWER:
true
false
Part D
True or false: The quantity represented by is a function of time (i.e., is not constant).
ANSWER:
true
false
The angular velocity always varies with time when the angular acceleration is nonzero.
Part E
Which of the following equations is not an explicit function of time , that is, does not involve as a variable, and is therefore useful when you do not know or do not need the time?
ANSWER:
Part F
In the equation , what does the time variable represent?Choose the answer that is always true. Several of the statements may be true in a particular problem, but only one is always true.
ANSWER:
the moment in time at which the angular velocity equals

the moment in time at which the angular velocity equals
the time elapsed from when the angular velocity equals until the angular velocity equals
Consider two particles A and B. The angular position of particle A, with constant angular acceleration,
depends on time according to . At time , particle B, which also undergoes constant angular accelaration, has twice the angular acceleration, half the angular velocity,
and the same angular position that particle A had at time .Part G
Which of the following equations describes the angular position of particle B?Hint G.1 How to approach this part
Hint not displayed
ANSWER:
Note that particle B has a smaller initial angular velocity but greater angular acceleration. Also, it has been in motion less time than particle A.
Part H
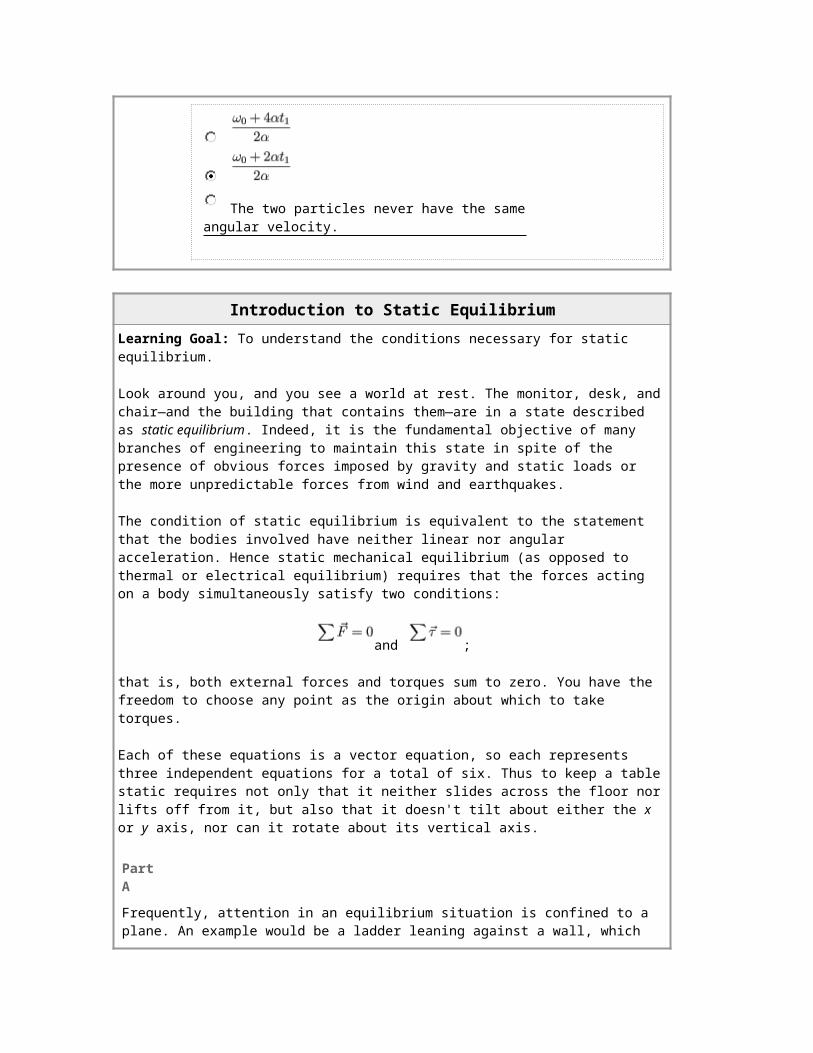
How long after the time does the angular velocity of particle B equal that of particle A?Hint H.1 How to approach this part
Write expressions for the angular velocity of A and B as functions of time, either by comparison of the above equations with the general kinematic equations or by differentiating the above equations.
Then equate the 2 expressions and solve for .
ANSWER:
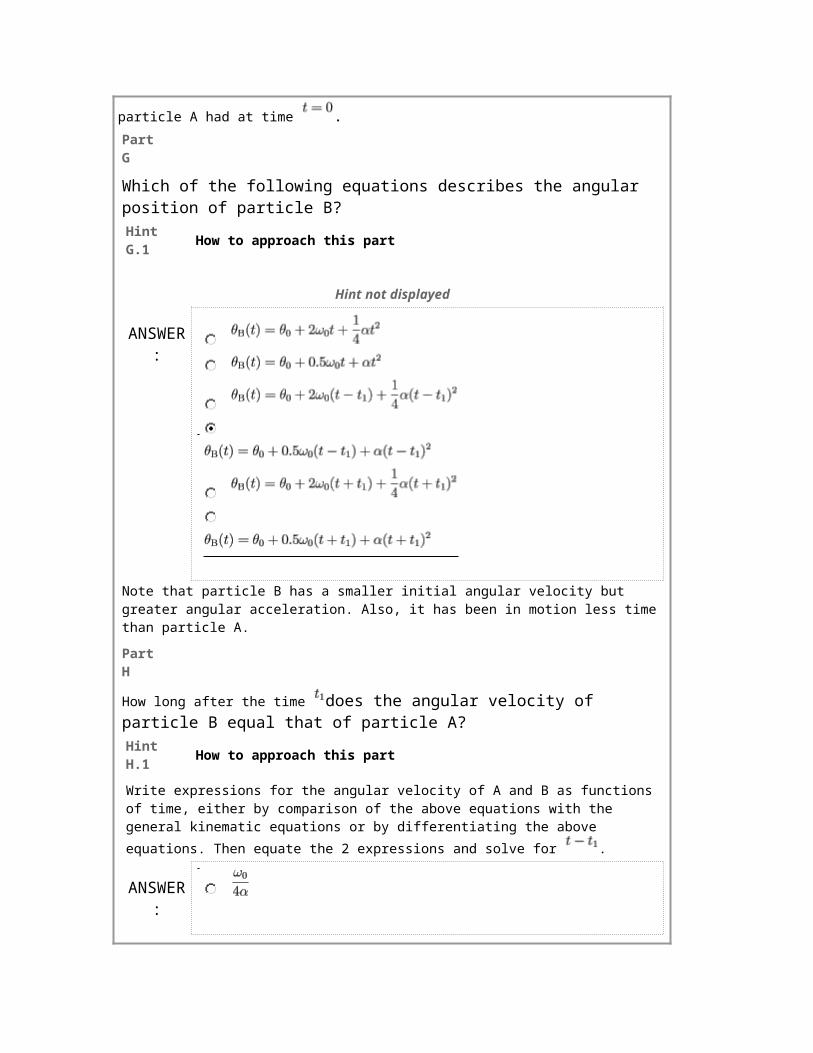
The two particles never have the same angular velocity.
Introduction to Static Equilibrium
Learning Goal: To understand the conditions necessary for static equilibrium.
Look around you, and you see a world at rest. The monitor, desk, and chair—and the building that contains them—are in a state described as static equilibrium. Indeed, it is the fundamental objective of many branches of engineering to maintain this state in spite of the presence of obvious forces imposed by gravity and static loads or the more unpredictable forces from wind and earthquakes.
The condition of static equilibrium is equivalent to the statement that the bodies involved have neither linear nor angular acceleration. Hence static mechanical equilibrium (as opposed to thermal or electrical equilibrium) requires that the forces acting on a body simultaneously satisfy two conditions:
and ;
that is, both external forces and torques sum to zero. You have the freedom to choose any point as the origin about which to take torques.
Each of these equations is a vector equation, so each represents three independent equations for a total of six. Thus to keep a table static requires not only that it neither slides across the floor nor lifts off from it, but also that it doesn't tilt about either the x or y axis, nor can it rotate about its vertical axis.
Part A
Frequently, attention in an equilibrium situation is confined to a plane. An example would be a ladder leaning against a wall, which is in danger of slipping only in the plane perpendicular to the ground and wall. By orienting a Cartesian coordinate system so that the x and y axes are in this plane, choose which of the following sets of quantities must be zero to maintain static equilibrium in this plane.Hint A.1 Simplifying the equations
Hint not displayed
ANSWER:
and and
and and
and and and
and and and and
Part B
As an example, consider the case of a board of length and negligible mass. Take the x axis to be the horizontal axis along the board and the y axis to be the vertical axis perpendicular to the board. A
mass of weight is strapped to the board a distance from the left-hand end.
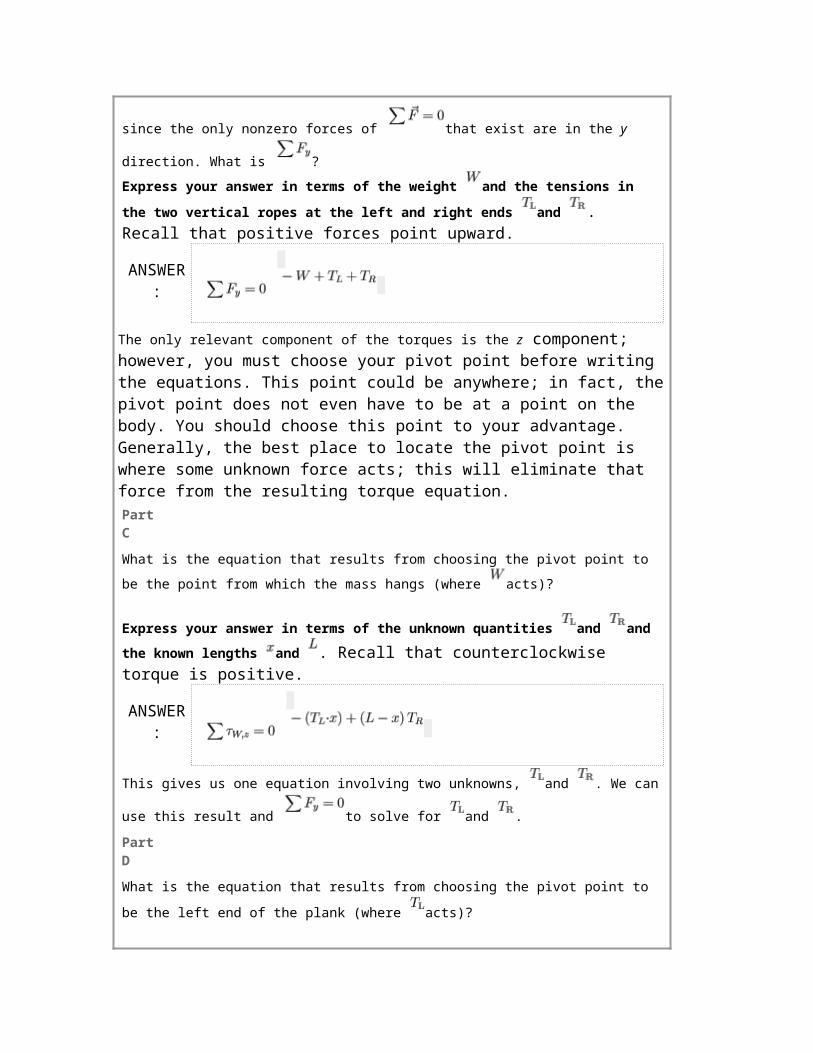
This is a static equilibrium problem, and a good first step is to write down the equation for the sum of all the forces in the y direction since the
only nonzero forces of that exist are in the y direction. What is ?
Express your answer in terms of the weight and the tensions in the two vertical ropes at the
left and right ends and . Recall that positive forces point upward.
ANSWER:
The only relevant component of the torques is the z component; however, you must choose your pivot point before writing the equations. This point could be anywhere; in fact, the pivot point does not even have to be at a point on the body. You should choose this point to your advantage. Generally, the best place to locate the pivot point is where some unknown force acts; this will eliminate that force from the resulting torque equation. Part C
What is the equation that results from choosing the pivot point to be the point from which the mass
hangs (where acts)?
Express your answer in terms of the unknown quantities and and the known lengths

and . Recall that counterclockwise torque is positive.
ANSWER:
This gives us one equation involving two unknowns, and . We can use this result and
to solve for and .
Part D
What is the equation that results from choosing the pivot point to be the left end of the plank (where
acts)?
Express your answer in terms of , , , and the dimensions and . Not all of these variables may show up in the solution.
ANSWER:
Part E
What is the equation that results from choosing the pivot point to be the right end of the plank (where
acts)?
Express your answer in terms of , , , and the dimensions and . Not all of these variables may show up in the solution.
ANSWER:
Part F
Solve for , the tension in the right rope.Part F.1
Choose the correct equation
Part not displayed
Express your answer in terms of and the dimensions and . Not all of these variables may show up in the solution.
ANSWER:
=
Part G
Solve for , the tension in the left rope.
Part G.1
Choose the correct equation
Part not displayed
Express your answer in terms of and the dimensions and . Not all of these variables may show up in the solution.
ANSWER:
=
Part H
Solve for the tension in the left rope, , in the special case that . Be sure the result checks with your intuition.
Express your answer in terms of and the dimensions and . Not all of these variables may show up in the solution.
ANSWER:
=
Only one set of forces, exactly balanced, produces static equilibrium. From this perspective it might seem puzzling that so much of the world is static. One must realize, however, that many forces—like those of the tensions in the ropes here or those between the floor and an object resting on it—increase very quickly as the object moves. If there is a slight imbalance of the forces, the object accelerates so that its position changes until the object has adjusted itself to restore the force balance. It then oscillates about this point until friction or some other dissipative mechanism causes it to become stationary at the exact equilibrium point.
Two Faces of Velocity
Many problems involve only linear velocities, which have relatively simple mathematical descriptions. In circular motion, the linear velocity is constantly changing direction, so the mathematics becomes complicated in Cartesian coordinates. The velocity and position vectors are perpendicular to each other. The math becomes much simpler if we use polar coordinates and look at the angular velocity.

Polar coordinates refer to the angular position and the distance from the origin . If the angular velocity is constant, then it equals the change in angular position divided by the change in time:
. From the angular velocity and the radius of the circle, the linear speed of an object can be found.
Part A
The US Army's MH-47E Chinook helicopter is used as a heavy lift vehicle. The rotor has three
blades that rotate with a frequency of 225 revolutions per minute. What is the angular velocity of the blades, measured in radians per second?Hint A.1
How to approach the problem
Hint not displayed
Part A.2
Convert revolutions per minute to revolutions per second
Part not displayed
Part A.3
Convert revolutions per second to radians per second
Part not displayed
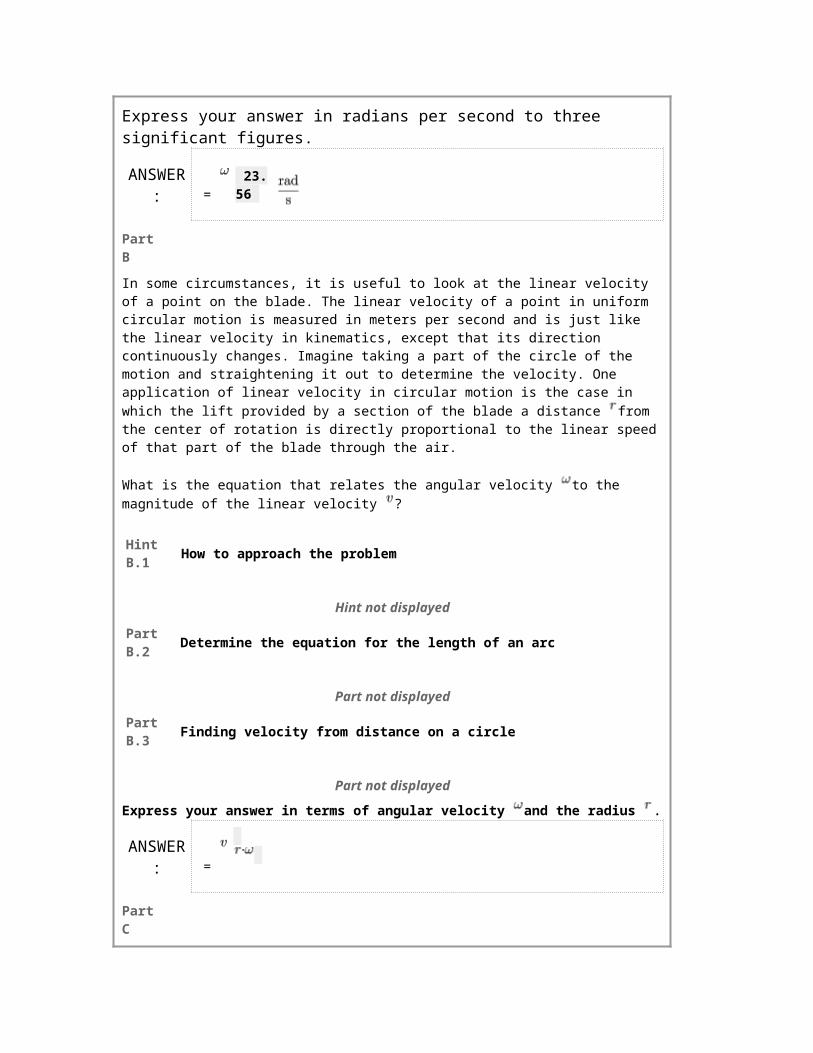
Express your answer in radians per second to three significant figures.
ANSWER:
=
23.56
Part B

In some circumstances, it is useful to look at the linear velocity of a point on the blade. The linear velocity of a point in uniform circular motion is measured in meters per second and is just like the linear velocity in kinematics, except that its direction continuously changes. Imagine taking a part of the circle of the motion and straightening it out to determine the velocity. One application of linear velocity in circular motion is the case in which the lift provided by a section of the blade a distance from the center of rotation is directly proportional to the linear speed of that part of the blade through the air.
What is the equation that relates the angular velocity to the magnitude of the linear velocity ?
Hint B.1
How to approach the problem
Hint not displayed
Part B.2
Determine the equation for the length of an arc
Part not displayed
Part B.3
Finding velocity from distance on a circle
Part not displayed
Express your answer in terms of angular velocity and the radius .
ANSWER:
=
Part C
The tips of the blades of the Chinook helicopter lie on a circle of diameter of 18.29 meters. What is the airspeed of the tip of the blades when they are rotating at 225 rpm?Hint C.1
How to approach the problem
Hint not displayed
Express your answer in meters per second to three significant figures.
ANSWER:
=
215
Part D
Consider the part of a blade that is 4.00 meters from the central hub. What is the velocity of this part when the blades are rotating at 225 rpm?Express your answer in meters per second to two significant digits.

ANSWER:
=
94
Scaling of Moments of Inertia
Learning Goal: To understand the concept of moment of inertia and how it depends on mass, radius, and mass distribution.
In rigid-body rotational dynamics, the role analogous to the mass of a body (when one is considering translational motion) is played by the body's moment of inertia. For this reason, conceptual understanding of the motion of a rigid body requires some understanding of moments of inertia. This problem should help you develop such an understanding.
The moment of inertia of a body about some specified axis is , where is a dimensionless constant, is the mass of the body, and is the perpendicular distance from the axis of rotation. Therefore, if you have two similarly shaped objects of the same size but with one twice as massive as the other, the more massive object should have a moment of inertia twice that of the less massive one. Furthermore, if you have two similarly shaped objects of the same mass, but one has twice the size of the other, the larger object should have a moment of inertia that is four times that of the smaller one.
Part A
Two spherical shells have their mass uniformly distrubuted over the spherical surface. One of the shells has a diameter of 2 meters and a mass of 1 kilogram. The other shell has a diameter of 1 meter. What must the mass of the 1-meter shell be for both shells to have the same moment of inertia about their centers of mass?
ANSWER:
=
4 kg
It is important to understand how the dimensionless constant in the moment of inertia formula given in the problem introduction is determined. Consider a disk and a thin ring, both having the same outer
radius and mass . The moment of inertia of the disk is , while the moment of inertia of the
ring is . (For each object, the axis is perpendicular to the plane of the object and passes through the object's center of mass.)
The factor of for the disk gives an indication of how the mass is distributed in that object. If both the disk and ring are spinning with the same angular velocity , the ring should have a greater kinetic energy, because all of the mass of the ring has linear speed , whereas the linear speeds of the different parts of the disk vary, depending on how far the part is from the center, and these speeds vary from zero to .
In general, the value of reflects the distribution of mass within the object. A number close to indicates that most of the mass is located at a distance from the center of mass close to , while a
number much less than indicates that most of the mass is located near the center of mass.
Part B
Consider the moment of inertia of a solid uniform disk, versus that of a solid sphere, about their respective centers of mass. Assume that they both have the same mass and outer radius, that they have uniform mass distributions, and that the disk is rotated about an axis perpendicular to its face.
What is the relation between the moment of inertia of the disk and that of the sphere ?Hint B.1
How to approach the problem
Hint not displayed
ANSWER:
Torques on a Seesaw: A Tutorial
Learning Goal: To make the connection between your intuitive understanding of a seesaw and the standard formalism for torque.This problem deals with the concept of torque, the "twist" that an off-center force applies to a body
that tends to make it rotate. Try to use your intuition to answer the following question. If your intuition fails, work the rest of the problem and return here when you feel that you are more comfortable with torques.Part A

A mother is helping her children, of unequal weight, to balance on a seesaw so that they will be able to make it tilt back and forth without the heavier child simply sinking to the ground. Given that her
heavier child of weight is sitting a distance to the left of the pivot, at what distance must she place her second child of weight on the right side of the pivot to balance the seesaw?Hint A.1
How to approach the problem
Hint not displayed
Express your answer in terms of , , and .
ANSWER:
=
The figure shows the seesaw slightly tilted, as will be the case when in use. This does not change the torque balance because the horizontal distances from the pivot to each child (which are called the moment arms for the vertically directed weight and must be used to calculate the torque instead of the distance along the seesaw) are reduced equally, so the sum of the torques is zero at any angle. Given that the torque is zero at all times (except when one or both children push on the ground), there will generally be no angular acceleration of the seesaw, and the seesaw will rotate at a constant velocity between pushes from the feet of the children on the ground.
Now consider this problem as a more formal introduction to torque. The torque of each child about the pivot point is the product of the child's weight and the distance of the child (strictly speaking, the child's center of mass) from the pivot. The sign of the torque is positive if it would cause a counterclockwise rotation of the seesaw. The distance is measured perpendicular to the line of force and is called the moment arm.
The concept of torque requires both a force and a specification of the pivot point, emphasized by the first subscript on the torque.
Part B
Find , the torque about the pivot due to the weight of the smaller child on the seesaw.
Express your answer in terms of and .
ANSWER:
=
The children's mother wants the seesaw to balance, which means that there can be no angular acceleration about the pivot. The balanced seesaw will then be in equilibrium since it has neither linear acceleration nor rotational acceleration.
For the linear acceleration to be zero, the vector sum of forces acting on the seesaw and children must equal zero.
For the angular acceleration to be zero, the sum of the torques about the pivot must equal zero. This can be written
,
where is the torque about the pivot due to the th force.
Part C
Determine , the sum of the torques on the seesaw. Consider only the torques exerted by the children.Hint C.1
Torque from the weight of the seesaw
Hint not displayed
Express your answer in terms of , , , and .
ANSWER:
Good! If you did not solve for the distance required to balance the seesaw in Part A, do so now.
The equation applies to any body that is not rotationally accelerating. Combining this
equation with (which applies to any body that is not accelerating linearly) gives a pair of equations that are sufficient to form the basis of statics; these or similar, often more complicated equations govern structures that are not accelerating. The torque equation is often of more utility, however, because you can choose the pivot point arbitrarily (often so that unknown forces have no moment arm and therefore contribute no torque). The art of applying these equations to large or complicated structures constitutes a significant part of mechanical and civil engineering.
The child with weight has an identical twin also of weight . The two twins now sit on the same
side of the seesaw, with one twin a distance from the pivot and the other a distance .
Part D
Where should the mother position the child of weight to balance the seesaw now?
Part D.1
Balancing the seesaw
For the seesaw to balance, the sum of the torques from the three children must be zero. What is the sum of the torques?
Express your answer in terms of , , , , and .
ANSWER:
Now solve you torque equation for .
Express your answer in terms of , , , and .
ANSWER:
=
Bad news! When the mother finds the distance from the previous part it turns out to be greater than
, the distance from the pivot to the end of the seesaw. Hence, even with the child of weight at the very end of the seesaw the twins exert more torque than the heavier child does. The mother now
elects to balance the seesaw by pushing sideways on an ornament (shown in red) that is a height

above the pivot.
Part E
With what force in the rightwards direction, , should the mother push? Note that if you think the
force exerted by the mother should be toward the left, your final answer should be negative.Hint E.1
Sign conventions
Hint not displayed
Part E.2 Torque due to mother's push
Part not displayed
Express your answer in terms of , , , , , and .
ANSWER:
=
This answer will necessarily be negative, because you were told that to balance the seesaw with the
twins on the right, the child of weight had to be "beyond the end" of the seesaw. Therefore, when
is the position of the child of weight , will be less than zero. Hence the mother must push to the left as you'd expect.
Kinetic Energy and Moment of Inertia
Consider a particle of mass that is revolving with angular speed around an axis. The perpendicular

distance from the particle to the axis is .
Part A
Find the kinetic energy of the rotating particle.Part A.1
Find the speed of the particle
Part not displayed
Express your answer in terms of , , and .
ANSWER:
=
Part B
The kinetic energy of a rotating body is generally written as , where is the moment of inertia. Find the moment of inertia of the particle described in the problem introduction with respect to the axis about which it is rotating.Hint B.1
How to approach the problem
Hint not displayed
Give your answer in terms of and , not .
ANSWER:
=
Consider a system of several point masses all rotating about the same axis. The total kinetic energy of the system is the sum of the kinetic energies of all of the masses. For point masses,

.
Comparing this to the expression for the kinetic energy given in Part C, we see that the moment of inertia is
.
In other words, the total moment of inertia is the sum of the moments of inertia of each mass.
Part C
Find the moment of inertia of a hoop of radius and mass with respect to an axis perpendicular to the hoop and passing through its center.
Part C.1
Find the moment of inertia of a segment of the hoop
Part not displayed
Express your answer in terms of and .
ANSWER:
=
Flywheel Kinematics
A heavy flywheel is accelerated (rotationally) by a motor that provides constant torque and therefore a
constant angular acceleration . The flywheel is assumed to be stationary at time in Parts A, B, and C of this problem. Part A

Find the time it takes to accelerate the flywheel to 10.0 rps (revolutions per second) if is 5.00
radians/s .Hint A.1
A linear analogy
Hint not displayed
Hint A.2
Angular velocity as a function of time
Hint not displayed
Hint A.3
A reminder about unit conversion.
Hint not displayed
Give a numerical answer, in seconds, to one decimal place.
ANSWER:
=
12.6 s
Part B
Find the time to accelerate the flywheel from rest up to angular velocity .Hint B.1
Angular velocity as a function of time
Hint not displayed
Express your answer in terms of and .
ANSWER:
=
Part C
Find the angle through which the flywheel will have turned during the time it takes for it to accelerate from rest up to angular velocity .Hint C.1
A linear analogy
Hint not displayed
Hint C.2
Angular velocity as a function of displacement
Hint not displayed

Express your answer in terms of any of the following: , , and/or .
ANSWER:
=
Part D
Assume that the motor has accelerated the wheel up to an angular velocity with angular
acceleration in time . At this point, the motor is turned off, and a brake is applied that decelerates
the wheel with a constant angular acceleration of . Find , the time it will take the wheel to stop after the brake is applied (that is, the time for the wheel to reach zero angular velocity).Hint D.1
How to approach the problem
Hint not displayed
Express your answer in terms of any of the following: , , and/or .
ANSWER:
=
Vector Cross Product
Let vectors , , and .Calculate the following, expressing your answers as ordered triples (three comma-separated numbers). Part A
Hint A.1 The cross product
Hint not displayed
ANSWER:
=
4,5,-17
Part B
ANSWER:
=
-4,-5,17
Part C

ANSWER:
=
24,30,-102
Part D
ANSWER:
=
15,5,5
Part E
ANSWER:
=
55
and are different vectors with lengths and respectively. Find the following, expressing your answers in terms of given quantities.Part F
If and are perpendicular,Hint F.1
What is the angle between perpendicular vectors?
Hint not displayed
Hint F.2
Magnitude of the cross product
Hint not displayed
ANSWER:
=
Part G
If and are parallel,Hint G.1 What is the angle between two parallel vectors?
Hint not displayed
ANSWER:
=
0

Problem 13.6
A magnetic computer disk 8.0 cm in diameter is initially at rest. A small dot is painted on the edge of
the disk. The disk accelerates at for , then coasts at a steady angular velocity for
another . Part A
What is the speed of the dot at t = 1.0 s?
ANSWER:
12.0
m/s
Part B
Through how many revolutions has it turned?
ANSWER:
35.8
rev
Problem 13.56
Part A
A 3.0-m-long rigid beam with a mass of 100 kg is supported at each end. An 80 kg student stands 2.0 m from support 1. How much upward force does support 1 exert on the beam?
ANSWER:
751
N
Problem 13.58
A forearm can be modeled as a 2.20 , 32-cm-long "beam" that pivots at the elbow and is supported
by the biceps.
Part A
How much force must the biceps exert to hold a 460 ball with the forearm parallel to the floor?
ANSWER:
196
N
Summary 11 of 11 problems complete (101.28% avg. score)101.09 of 100 points
[ Print ]