1 MAŞINI ROTATIVE CU RELUCTANŢĂ VARIABILĂ Maşinile electrice cu reluctanţă variabilă au căpătat in ultimul timp, datorită diversificării şi creşterii performanţelor sistemelor electronice de alimentare şi control, o răspândire din ce in ce mai mare, ocupând un segment în creştere din piaţa acţionărilor cu turaţie variabilă. Din categoria maşinilor cu reluctanţă variabilă face parte şi maşina sincronă reactivă care a fost prezentată, in acesastă parte urmând sa fie discutate maşina cu poli aparenţi pe ambele armături ( SRM = switched reluctance machine), maşina cu poli aparenţi pe ambele armături şi magneţi permanenţi ( DSPMM = double salient permanent magnet machine), si motorul pas cu pas, motor care este in fapt un caz particular al SRM. Toate aceste maşini electrice funcţionează pe principiul reluctanţei minime, iar în cazul în care sunt prevăzute cu magneţi permanenţi combină cele doua principii de funcţionare. Toate aceste maşini sunt autocomutate, adică la toate momentul în care se face alimentarea înfăşurărilor, şi timpul cât acestea sunt alimentate, depinde de poziţia rotorului. Aceste maşini nu pot practic funcţiona alimentate de la reţeaua de tensiune şi frecvenţa constantă şi în consecinţă un rol important în funcţionarea acestor maşini îl joacă convertorul electronic de putere prin intermediul căruia se face alimentarea şi comanda acestor maşini. Mai multe tipuri de maşini electrice au reluctanţa variabilă, cum ar fi maşinile sincrone cu poli aparenţi, cu sau fără excitaţie electromagnetică sau cu magneţi permanenţi, sau maşinile de curent continuu. Maşina sincronă reactiva funcţionează chiar pe baza principiului reluctanţei minime, adică rotorul se roteşte astfel încât câmpul statoric să se închidă pe calea de reluctanţă minimă. Deci rotorul se roteşte sincron cu câmpul învârtitor statoric. La aceste maşini alimentarea se face de la reţeaua de curent alternativ sau de curent continuu, cazul maşinii de curent continuu, toate maşinile pot funcţiona fără să fie necesară o sincronizare a alimentării cu poziţia rotorului. Excepţie face maşina sincronă fără colivie de pornire/amortizare în procesul de pornire când se alimentează cu tensiune de frecvenţă variabilă şi când alimentarea fazelor se sincronizează cu poziţia rotorului. Maşinile cu reluctanţă variabilă şi comutaţie electronică sunt alimentate prin convertoare electronice de putere, ele funcţionând numai dacă alimentarea fazelor este sincronizată cu poziţia rotorului. Si alte maşini electrice, chiar maşina de inducţie de exemplu, pot funcţiona în acest mod

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
MAŞINI ROTATIVE CU RELUCTANŢĂ VARIABILĂ
Maşinile electrice cu reluctanţă variabilă au căpătat in ultimul timp, datorită diversificării
şi creşterii performanţelor sistemelor electronice de alimentare şi control, o răspândire din ce in ce
mai mare, ocupând un segment în creştere din piaţa acţionărilor cu turaţie variabilă. Din categoria
maşinilor cu reluctanţă variabilă face parte şi maşina sincronă reactivă care a fost prezentată, in
acesastă parte urmând sa fie discutate maşina cu poli aparenţi pe ambele armături ( SRM = switched
reluctance machine), maşina cu poli aparenţi pe ambele armături şi magneţi permanenţi ( DSPMM
= double salient permanent magnet machine), si motorul pas cu pas, motor care este in fapt un caz
particular al SRM. Toate aceste maşini electrice funcţionează pe principiul reluctanţei minime, iar
în cazul în care sunt prevăzute cu magneţi permanenţi combină cele doua principii de funcţionare.
Toate aceste maşini sunt autocomutate, adică la toate momentul în care se face alimentarea
înfăşurărilor, şi timpul cât acestea sunt alimentate, depinde de poziţia rotorului. Aceste maşini nu
pot practic funcţiona alimentate de la reţeaua de tensiune şi frecvenţa constantă şi în consecinţă un
rol important în funcţionarea acestor maşini îl joacă convertorul electronic de putere prin
intermediul căruia se face alimentarea şi comanda acestor maşini.
Mai multe tipuri de maşini electrice au reluctanţa variabilă, cum ar fi maşinile sincrone cu
poli aparenţi, cu sau fără excitaţie electromagnetică sau cu magneţi permanenţi, sau maşinile de
curent continuu. Maşina sincronă reactiva funcţionează chiar pe baza principiului reluctanţei
minime, adică rotorul se roteşte astfel încât câmpul statoric să se închidă pe calea de reluctanţă
minimă. Deci rotorul se roteşte sincron cu câmpul învârtitor statoric. La aceste maşini alimentarea
se face de la reţeaua de curent alternativ sau de curent continuu, cazul maşinii de curent continuu,
toate maşinile pot funcţiona fără să fie necesară o sincronizare a alimentării cu poziţia rotorului.
Excepţie face maşina sincronă fără colivie de pornire/amortizare în procesul de pornire când se
alimentează cu tensiune de frecvenţă variabilă şi când alimentarea fazelor se sincronizează cu
poziţia rotorului.
Maşinile cu reluctanţă variabilă şi comutaţie electronică sunt alimentate prin convertoare
electronice de putere, ele funcţionând numai dacă alimentarea fazelor este sincronizată cu poziţia
rotorului. Si alte maşini electrice, chiar maşina de inducţie de exemplu, pot funcţiona în acest mod
2
dar numai în regim de turaţie variabilă şi când sunt complet comandate. În categoria maşinilor cu
reluctanţă variabilă şi comutaţie electronică sunt cuprinse maşina cu reluctanţă comutată electronic,
se va utiliza prescurtarea acceptată pe plan mondial adică SRM= switched reluctance motor sau
SRG pentru regimul de generator, motorul pas cu pas, care este în fapt un caz particular al SRM,
maşina cu reluctanţă şi cu magneţi permanenţi comutată electronic( DSPMM(G)= double salient
permanent magnet motor( generator)) şi maşina cu flux transversal(TFM(G)= transvers flux motor(
generator)). Cu excepţia SRM şi a motorului pas cu pas care au fost introduse în anii 60 ai secolului
trecut şi sunt deja aplicate în diverse acţionări existând deci şi o producţie de serie, celelalte tipuri
de maşini din această clasă sunt relativ noi, sfârşitul anilor 80 şi începutul anilor 90 secolul trecut, şi
cu toate că au o dezvoltare relativ impetuoasă nu sunt încă aplicate pe scară mai largă şi se produc
doar prototipuri. Chiar dacă nu au un trecut prea bogat, toate maşinile din această clasă trăiesc într-
un prezent cu multe şi interesante realizări şi aproape tuturor li se prefigurează un viitor de
competitori activi pe piaţa acţionărilor cu turaţie variabilă.
Motorul cu reluctanţă comutată( SRM)
Motorul cu reluctanţă comutată( SRM) are poli aparenţi pe stator şi pe rotor, rotorul fiind,
în construcţiile uzuale, pasiv, deci fără înfăşurări sau magneţi permanenţi. La acest motor cuplul
rezultă datorită tendinţei rotorului de a se roti într-o poziţie în care inductanţa fazei statorice
parcurse de curent, ca şi fluxul produs de aceasta, au valorile maxime. Evident acest motor
funcţionează pe baza aceluiaşi principiu ca şi motorul sincron reactiv, dar construcţia este diferită în
ceea ce priveşte statorul.
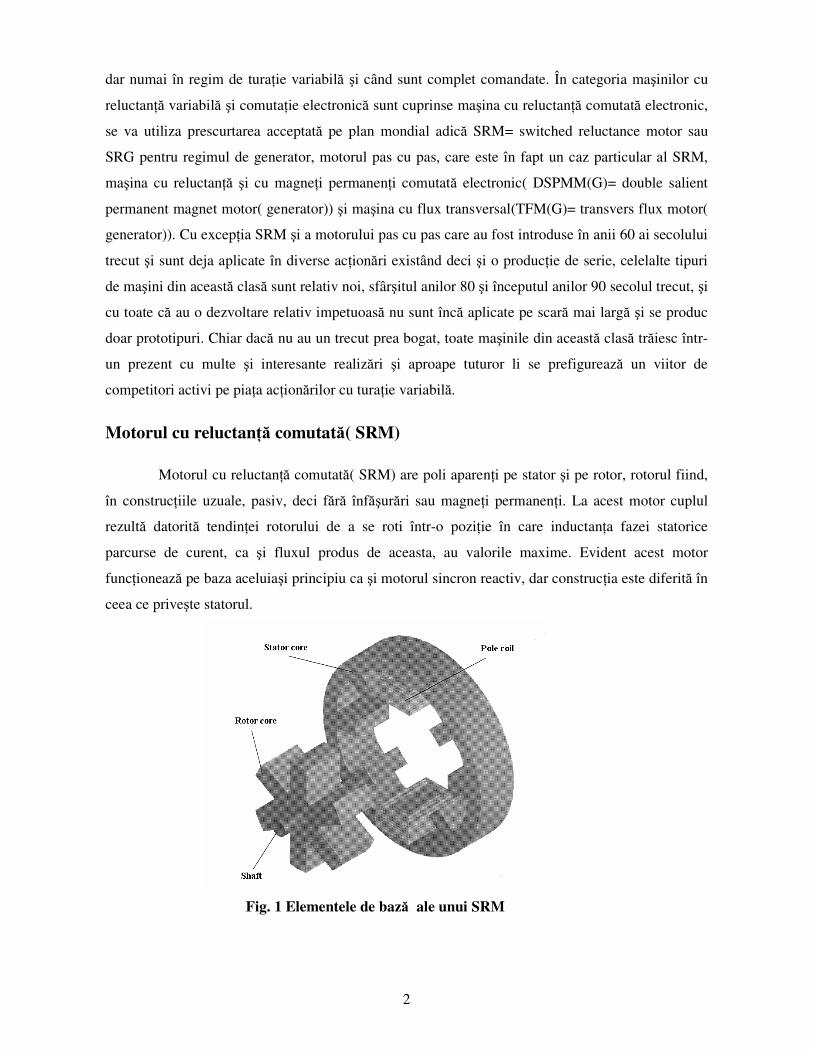
Fig. 1 Elementele de bază ale unui SRM
3
În rotor ambele motoare au poli aparenţi sau nesimetrie magnetică. Statorul motorului
sincron reactiv are crestături şi o înfăşurare repartizată iar statorul în cazul SRM are poli aparenţi şi
înfăşurare concentrată, cum se vede în figura 1.
Acest motor are o construcţie simplă, un rotor pasiv cu inerţie redusă, cuplu mare la
pornire şi cost redus. Cu toate dezavantajele sale, printre care trebuie menţionată necesitatea
detectării poziţiei rotorice şi a alimentării printr-un convertor electronic precum şi variaţiile de
cuplu pe o rotaţie completă, SRM reprezintă o alternativă, nu lipsită de atractivitate, pentru
motoarele de curent continuu sau de curent alternativ convenţionale. Aplicaţiile unor acţionări cu
SRM sunt destul de numeroase, de menţionat de exemplu maşina de spăla automata Neptune
produsă de compania Maytag utilizând motorul şi partea de alimentare şi comandă produse de
compania Emerson.
În ultimii treizeci de ani s-au publicat un număr impresionant de lucrări ştiinţifice dedicate
acestui motor, lucrări în care se urmăresc îmbunătăţiri constructive, dezvoltarea metodicilor de
proiectare, ridicarea performanţelor sistemelor de alimentare şi control şi nu numai. Mai multe
monografii au fost dedicate motorului, de remarcat cele publicate de Miller şi Krishnan,şi o sumă de
brevete de invenţii acordate au vizat tot dezvoltarea motorului şi a sistemului de alimentare şi
control.
Principiu de construcţie şi funcţionare
SRM este unul din cele mai simple motoare electrice având o construcţie simplă şi
robustă. Rotorul este pasiv deci fără înfăşurări sau magneţi permanenţi, cu poli aparenţi, fiind
realizat din tole dispuse normal, deci radial, sau axial în varianta ALA ca şi în cazul maşinii
sincrone reactive, cu un rotor cu poli aparenţi şi tole dispuse radial (fig. 1).
Statorul acestui motor este construit din tole dispuse radial şi are în construcţia uzuală poli
aparenţi, fig.1 Există şi variante constructive de stator cu poli înecaţi, dar înfăşurarea este
concentrată în toate variantele. Tolele statorice sunt asamblate în carcasă iar cele rotorice pe axul
rotoric. Celelalte componente constructive sunt cele uzuale , adică scuturi forţate şi lagăre cu
rulmenţi. Uzual motoarele au doua capete de ax scoase, unul utilizat pentru montarea pe el a
traductorului de poziţie. Cum rotorul nu este bobinat răcirea bobinajului statoric este
corespunzătoare şi nu sunt necesare, în mod normal, măsuri suplimentare pentru asigurarea răcirii.
Pentru a preveni blocarea rotorului în timpul funcţionării numărul de poli pe stator şi pe rotor este
diferit. Diferenţa, la motoarele elementare, este 2 iar la cele multiple de ordinul n este 2 înmulţit cu
ordinul de multiplicitate. Astfel numerele uzuale de poli la SRM, este dat în Tabelul1., prima cifră
pentru stator, a doua pentru rotor.
4
Tabelul.1. Numărul de poli la SRM
La SRM alimentarea fiecărei faze este în general independentă şi convertoarele electronice
au o structură specifică. În consecinţă numărul de faze nu este limitat decât de costul şi
complexitatea convertorului. Cum la un moment de timp este alimentată uzual o singură fază
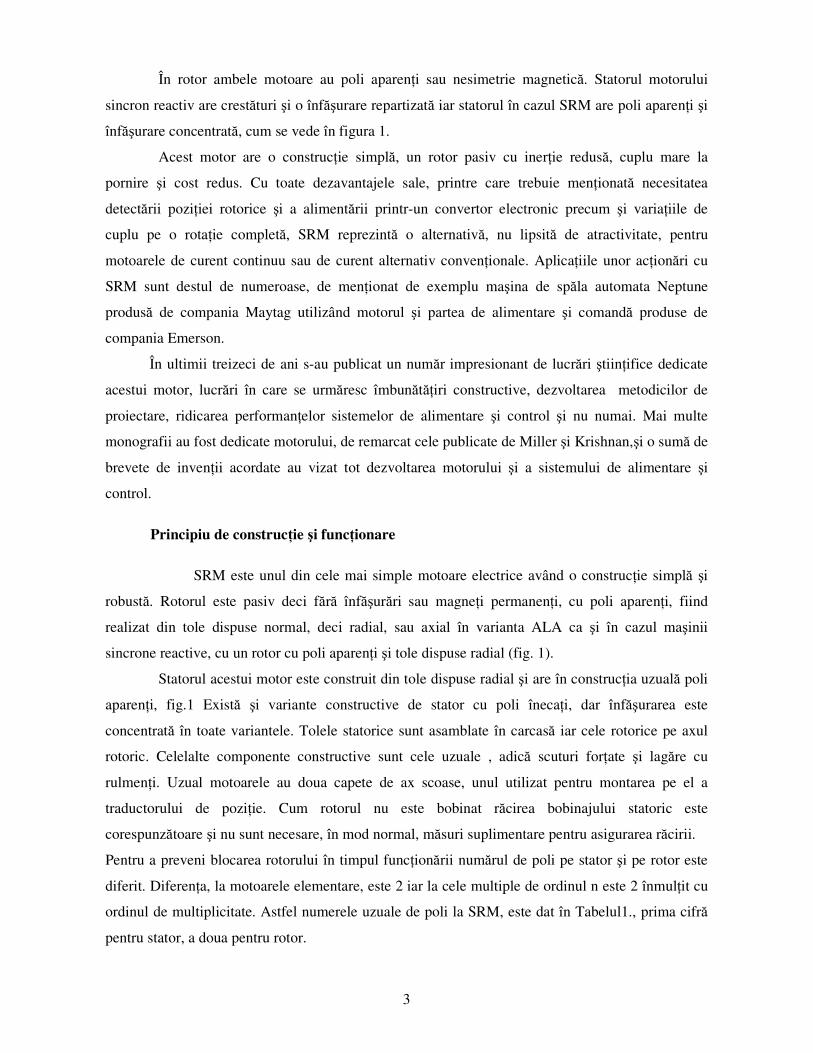
creşterea numărului de faze nu atrage după sine creşterea puterii dar reduce variaţiile de cuplu, cum
se vede din curbele de variaţie ale cuplului în funcţie de poziţia unghiulară a rotorului, Fig. 2.
Fig.2. Variaţia cuplului funcţie de poziţia rotorului, diferite numere de faze: a) trei
faze; b) patru faze; c) cinci faze
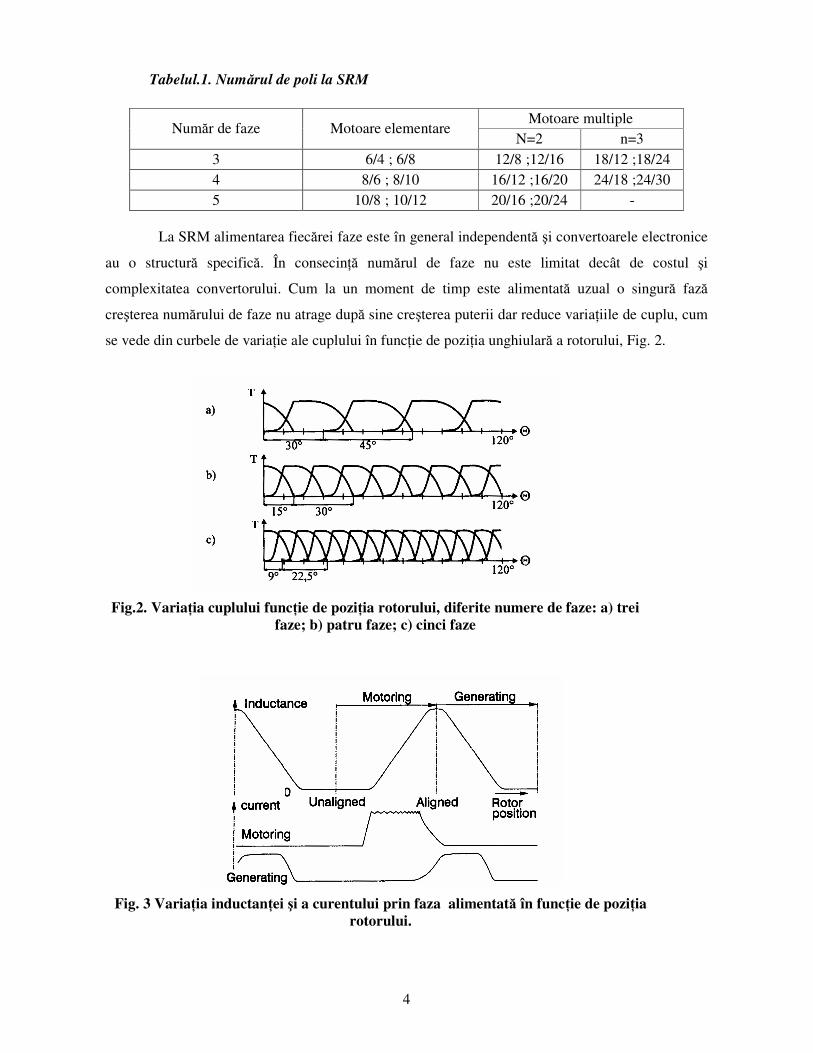
Fig. 3 Variaţia inductanţei şi a curentului prin faza alimentată în funcţie de poziţia
rotorului.
Motoare multiple Număr de faze Motoare elementare
N=2 n=3 3 6/4 ; 6/8 12/8 ;12/16 18/12 ;18/24 4 8/6 ; 8/10 16/12 ;16/20 24/18 ;24/30 5 10/8 ; 10/12 20/16 ;20/24 -

5
In funcţionarea SRM există, faţă de faza statorică alimentată, două poziţii limită, şi anume,
Fig. 3.
i) Poziţia aliniată când axa polului statoric excitat coincide cu o axă a unui pol rotoric. În
această poziţie fluxul şi inductanţa fazei au valoare maximă, Fig. 3.
ii) Poziţia nealiniată când axa polului statoric excitat coincide cu o axă a unei crestături
rotorice, poziţie în care valorile inductanţei şi ale fluxului fazei sunt minime, Fig.3.
Maşina funcţionează în regim de motor între o poziţie nealiniată şi una aliniată când
inductanţa şi fluxul fazei cresc, Fig. 3 şi în regim de generator când acestea descresc. În regim de
motor cuplul are tendinţa să deplaseze rotorul într-o poziţie aliniată, poziţie de reluctanţă minimă.
Cuplul instantaneu nu este constant, cum va fi demonstrate ulterior şi cum se vede în Fig. 2. Cuplul
mediu static se poate obţine din aria conversiei de energie în diagrama curent/flux dată în Fig. 4
unde sunt prezentate ciclurile de operare, ca şi modul în care circulă curentul din fază prin
tranzistoare şi respectiv diode de fugă.
Fig.4. Conversia de energie în diagrama flux- curent prin tranzistoare respectiv
diode de fugă.
În momentul iniţial rotorul este într-o poziţie nealiniată sau foarte aproape de o astfel de
poziţie. La alimentarea fazei, când ambele tranzistoare conduc, Fig. 4.b, fluxul creşte pe
caracteristica OC, Fig. 4.a. În poziţia care corespunde punctului C se deschid tranzistoarele,
6
tensiunea pe fază schimbă de sens şi curentul se închide prin diodele de fugă D1 şi D2, Fig. 4.d.
fluxul prin fază se reduce, variind pe caracteristica CO, Fig. 4.c. ciclul complet, care cuprinde
ambele caracteristici, şi care caracterizează transferul de energie pentru un pas la o fază este dat în
Fig. 4.e, suprafaţa ciclului fiind proporţională cu cuplul electromagnetic produs.
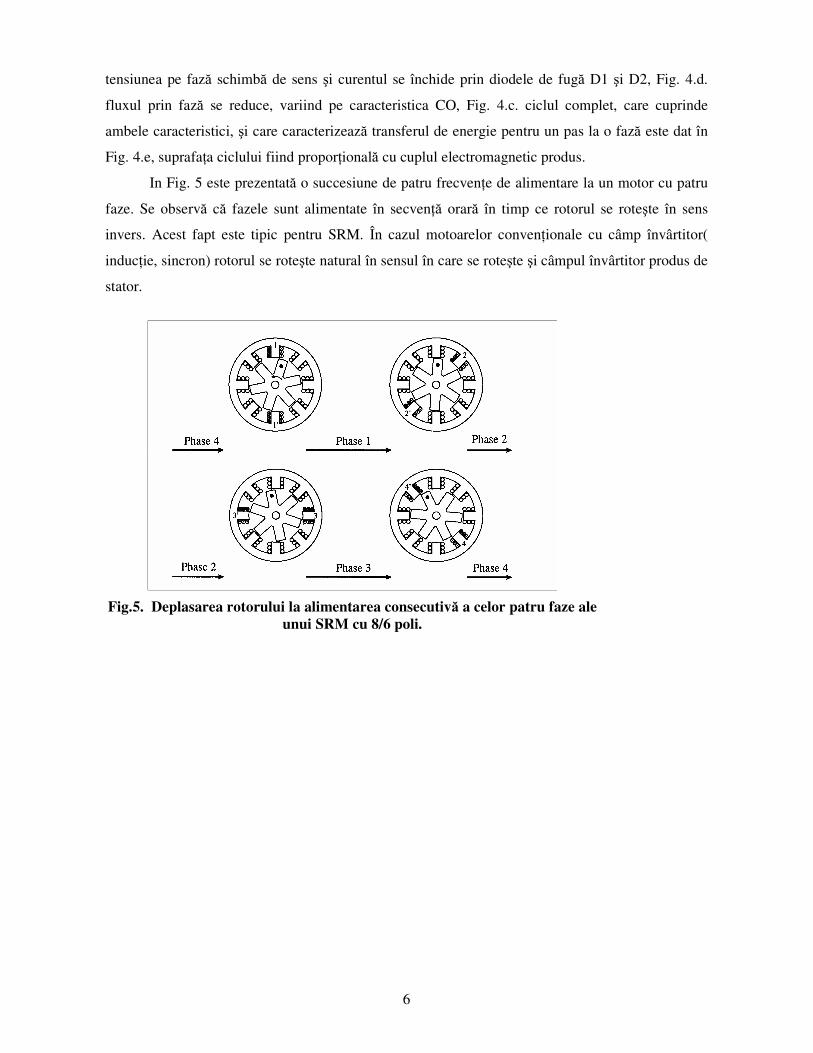
In Fig. 5 este prezentată o succesiune de patru frecvenţe de alimentare la un motor cu patru
faze. Se observă că fazele sunt alimentate în secvenţă orară în timp ce rotorul se roteşte în sens
invers. Acest fapt este tipic pentru SRM. În cazul motoarelor convenţionale cu câmp învârtitor(
inducţie, sincron) rotorul se roteşte natural în sensul în care se roteşte şi câmpul învârtitor produs de
stator.
Fig.5. Deplasarea rotorului la alimentarea consecutivă a celor patru faze ale
unui SRM cu 8/6 poli.
7
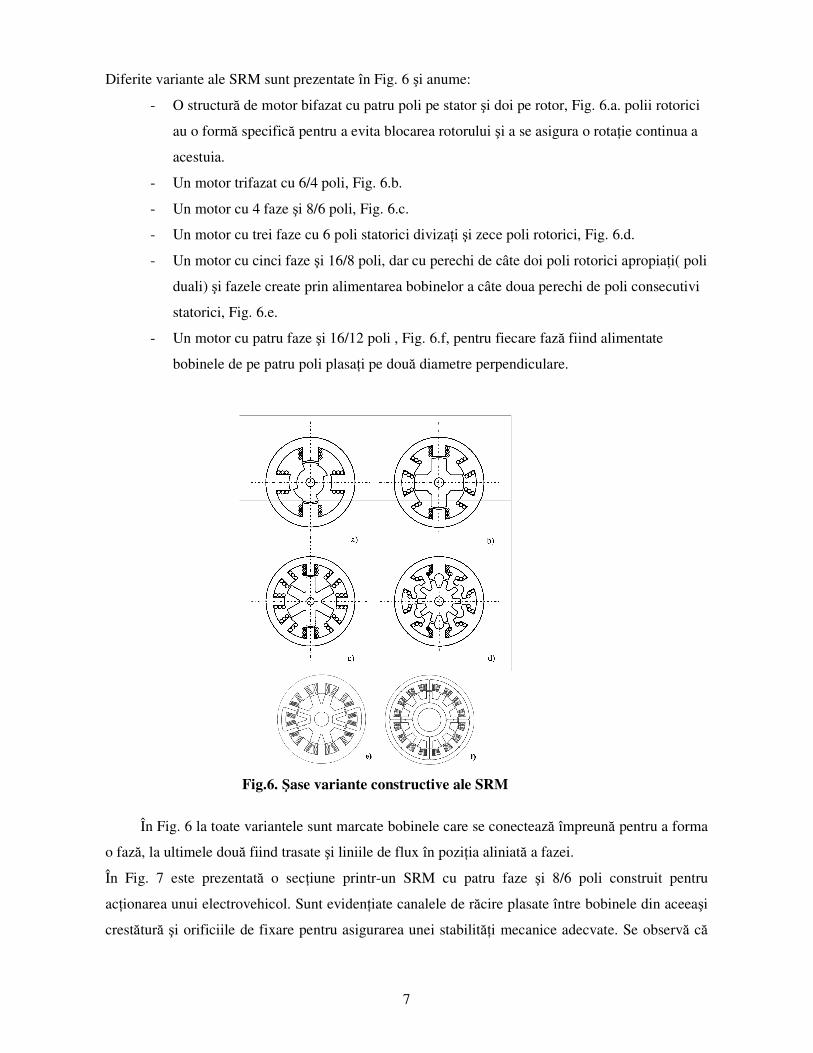
Diferite variante ale SRM sunt prezentate în Fig. 6 şi anume:
- O structură de motor bifazat cu patru poli pe stator şi doi pe rotor, Fig. 6.a. polii rotorici
au o formă specifică pentru a evita blocarea rotorului şi a se asigura o rotaţie continua a
acestuia.
- Un motor trifazat cu 6/4 poli, Fig. 6.b.
- Un motor cu 4 faze şi 8/6 poli, Fig. 6.c.
- Un motor cu trei faze cu 6 poli statorici divizaţi şi zece poli rotorici, Fig. 6.d.
- Un motor cu cinci faze şi 16/8 poli, dar cu perechi de câte doi poli rotorici apropiaţi( poli
duali) şi fazele create prin alimentarea bobinelor a câte doua perechi de poli consecutivi
statorici, Fig. 6.e.
- Un motor cu patru faze şi 16/12 poli , Fig. 6.f, pentru fiecare fază fiind alimentate
bobinele de pe patru poli plasaţi pe două diametre perpendiculare.
Fig.6. Şase variante constructive ale SRM
În Fig. 6 la toate variantele sunt marcate bobinele care se conectează împreună pentru a forma
o fază, la ultimele două fiind trasate şi liniile de flux în poziţia aliniată a fazei.
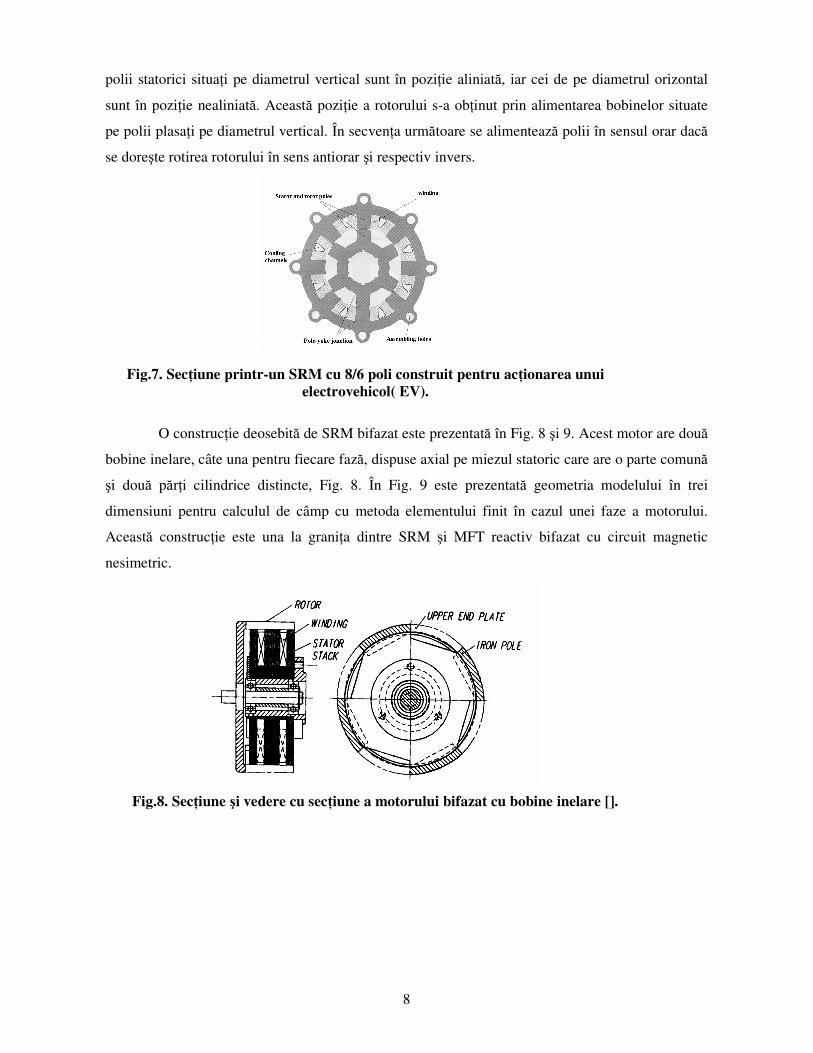
În Fig. 7 este prezentată o secţiune printr-un SRM cu patru faze şi 8/6 poli construit pentru
acţionarea unui electrovehicol. Sunt evidenţiate canalele de răcire plasate între bobinele din aceeaşi
crestătură şi orificiile de fixare pentru asigurarea unei stabilităţi mecanice adecvate. Se observă că
8
polii statorici situaţi pe diametrul vertical sunt în poziţie aliniată, iar cei de pe diametrul orizontal
sunt în poziţie nealiniată. Această poziţie a rotorului s-a obţinut prin alimentarea bobinelor situate
pe polii plasaţi pe diametrul vertical. În secvenţa următoare se alimentează polii în sensul orar dacă
se doreşte rotirea rotorului în sens antiorar şi respectiv invers.
Fig.7. Secţiune printr-un SRM cu 8/6 poli construit pentru acţionarea unui
electrovehicol( EV).
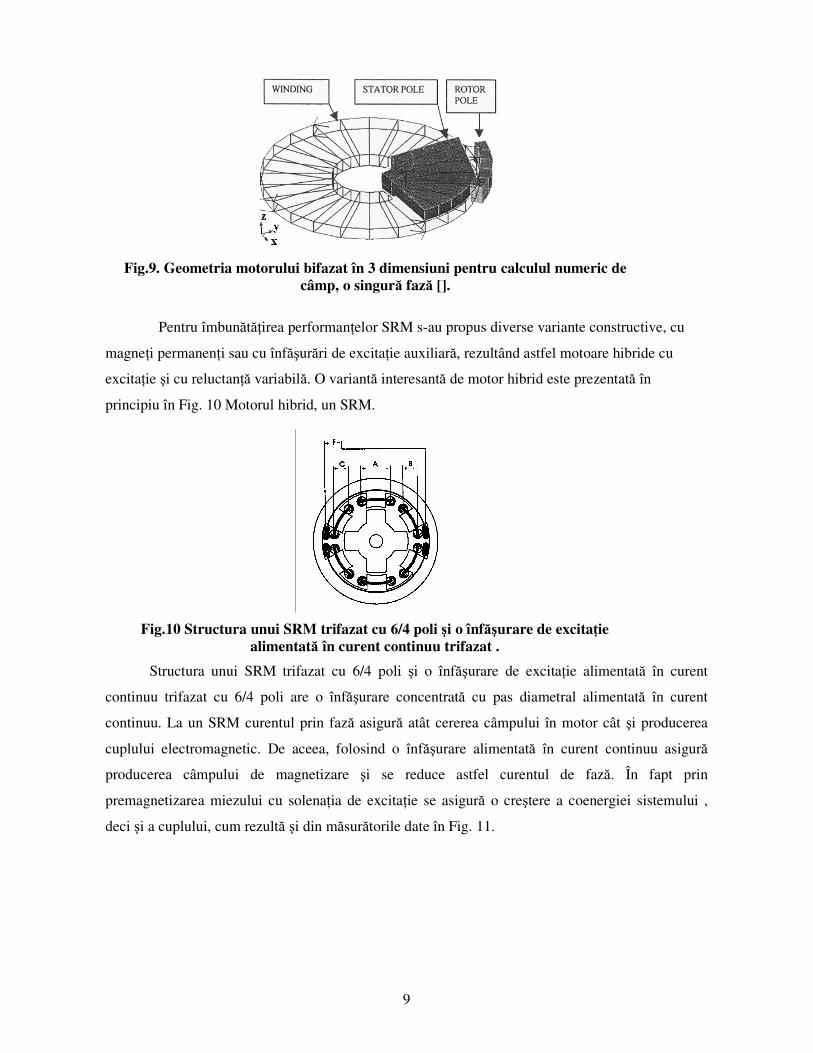
O construcţie deosebită de SRM bifazat este prezentată în Fig. 8 şi 9. Acest motor are două
bobine inelare, câte una pentru fiecare fază, dispuse axial pe miezul statoric care are o parte comună
şi două părţi cilindrice distincte, Fig. 8. În Fig. 9 este prezentată geometria modelului în trei
dimensiuni pentru calculul de câmp cu metoda elementului finit în cazul unei faze a motorului.
Această construcţie este una la graniţa dintre SRM şi MFT reactiv bifazat cu circuit magnetic
nesimetric.
Fig.8. Secţiune şi vedere cu secţiune a motorului bifazat cu bobine inelare [].
9
Fig.9. Geometria motorului bifazat în 3 dimensiuni pentru calculul numeric de
câmp, o singură fază [].
Pentru îmbunătăţirea performanţelor SRM s-au propus diverse variante constructive, cu
magneţi permanenţi sau cu înfăşurări de excitaţie auxiliară, rezultând astfel motoare hibride cu
excitaţie şi cu reluctanţă variabilă. O variantă interesantă de motor hibrid este prezentată în
principiu în Fig. 10 Motorul hibrid, un SRM.
Fig.10 Structura unui SRM trifazat cu 6/4 poli şi o înfăşurare de excitaţie
alimentată în curent continuu trifazat .
Structura unui SRM trifazat cu 6/4 poli şi o înfăşurare de excitaţie alimentată în curent
continuu trifazat cu 6/4 poli are o înfăşurare concentrată cu pas diametral alimentată în curent
continuu. La un SRM curentul prin fază asigură atât cererea câmpului în motor cât şi producerea
cuplului electromagnetic. De aceea, folosind o înfăşurare alimentată în curent continuu asigură
producerea câmpului de magnetizare şi se reduce astfel curentul de fază. În fapt prin
premagnetizarea miezului cu solenaţia de excitaţie se asigură o creştere a coenergiei sistemului ,
deci şi a cuplului, cum rezultă şi din măsurătorile date în Fig. 11.

10
Fig.11 Cuplul funcţie de viteză la SRM şi la SRM cu excitaţie în curent continuu(
SRDC în figură).
Se observă că SRDCM produce cuplu cu 60% mai mare la turaţii mici şi cu cca. 20% mai
mare la turaţii mari, curenţii de fază fiind cu cca. 30% mai mici. Acest motor hibrid prezentat în []
are dimensiuni şi putere mici şi rezultatele nu sunt întru totul reprezentative. Deci nu se poate trage
concluzia, numai din aceste rezultate, că un SRM hibrid este sigur o soluţie mai bună decât un SRM
obişnuit. Se poate spune că motorul hibrid poate fi o variantă interesantă, dar mai este până la a
produce numai SRM hibride, soluţia uzuală având încă avantaje demne de luat în seamă.
Alimentarea şi comanda SRM.
Convertorul electronic pentru alimentare care a mai fost prezentat anterior Fig. 13, are uzual
două tranzistoare şi două diode de fugă pe fiecare fază. Un convertor complet, care conţine şi
redresorul de la reţea şi circuitul intermediar de curent continuu, pentru un SRM trifazat este dat în
Fig. 12.
Fig.12 Convertor electronic trifazat pentru alimentarea SRM
Cu o astfel de punte asimetrică pe fiecare fază sunt posibile două strategii de alimentare a
fazei atunci când controlul curentului se face prin modularea în durată a pulsurilor( mod PWM). În
primul caz, Fig. 13 tranzistoarele T1 şi T2 conduc sau nu simultan. În cel de-al doilea caz, Fig. 14
tranzistorul T1 conduce ciclul întreg de conducţie a fazei, iar controlul curentului din fază în mod
11
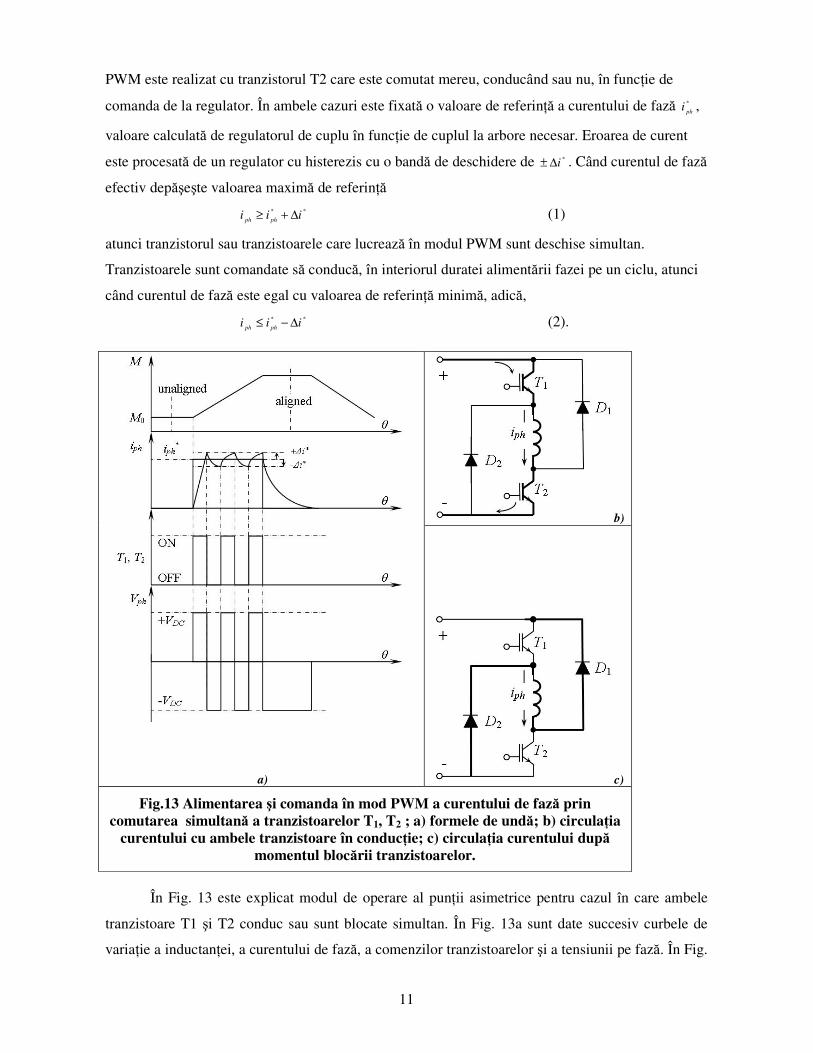
PWM este realizat cu tranzistorul T2 care este comutat mereu, conducând sau nu, în funcţie de
comanda de la regulator. În ambele cazuri este fixată o valoare de referinţă a curentului de fază *
phi ,
valoare calculată de regulatorul de cuplu în funcţie de cuplul la arbore necesar. Eroarea de curent
este procesată de un regulator cu histerezis cu o bandă de deschidere de *i∆± . Când curentul de fază
efectiv depăşeşte valoarea maximă de referinţă
**iii
phph∆+≥ (1)
atunci tranzistorul sau tranzistoarele care lucrează în modul PWM sunt deschise simultan.
Tranzistoarele sunt comandate să conducă, în interiorul duratei alimentării fazei pe un ciclu, atunci
când curentul de fază este egal cu valoarea de referinţă minimă, adică,
**iii
phph∆−≤ (2).
b)
a) c)
Fig.13 Alimentarea şi comanda în mod PWM a curentului de fază prin
comutarea simultană a tranzistoarelor T1, T2 ; a) formele de undă; b) circulaţia
curentului cu ambele tranzistoare în conducţie; c) circulaţia curentului după momentul blocării tranzistoarelor.
În Fig. 13 este explicat modul de operare al punţii asimetrice pentru cazul în care ambele
tranzistoare T1 şi T2 conduc sau sunt blocate simultan. În Fig. 13a sunt date succesiv curbele de
variaţie a inductanţei, a curentului de fază, a comenzilor tranzistoarelor şi a tensiunii pe fază. În Fig.
12
13b este arătat modul de circulaţie a curentului când ambele tranzistoare conduc. În cazul din Fig.
13b ambele tranzistoare sunt blocate şi curentul circulă prin diodele de fugă, tensiunea pe fază fiind
inversă. Pe durata inversării sensului tensiunii de fază energia înmagazinată în bobină în perioada
anterioară este cedată sursei. Deci în timpul unui ciclu de alimentare a fazei se face un schimb
repetat de energie între sursă şi bobină rezultând oscilaţii de tensiune în condensatorul C din
circuitul intermediar de curent continuu şi o creştere a pierderilor de comutaţie în tranzistoare şi
diode.
a) b)
c) Vph=0
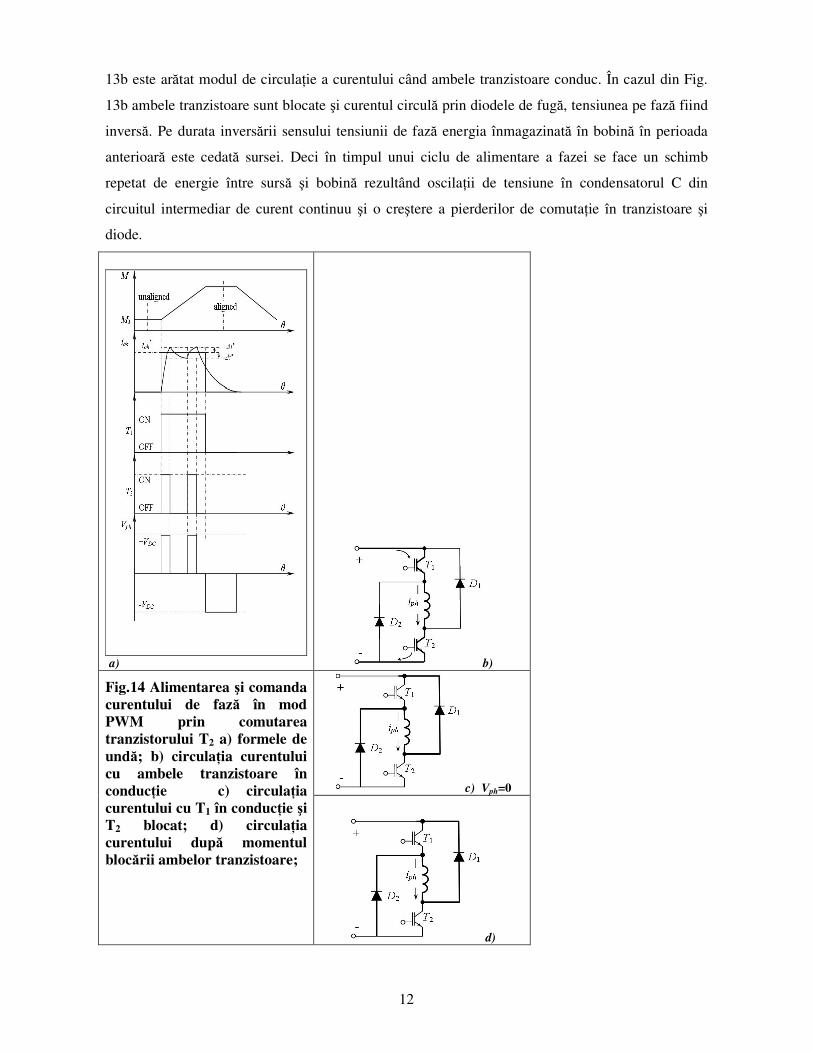
Fig.14 Alimentarea şi comanda
curentului de fază în mod
PWM prin comutarea
tranzistorului T2 a) formele de
undă; b) circulaţia curentului
cu ambele tranzistoare în
conducţie c) circulaţia
curentului cu T1 în conducţie şi T2 blocat; d) circulaţia
curentului după momentul
blocării ambelor tranzistoare;
d)

13
În Fig. 14 este prezentat modul de operare al punţii asimetrice pentru cazul în care
tranzistorul T1 conduce întreg ciclul iar tranzistorul T2 operează în mod PWM. În Fig. 14a sunt date
succesiv curbele de variaţie a inductanţei, a curentului de fază, a comenzilor tranzistoarelor şi a
tensiunii de fază. În Fig. 14b este arătat modul de circulaţie a curentului când ambele tranzistoare
conduc. În cazul din Fig. 4.1.16. c tranzistorul T1 conduce iar tranzistorul T2 este blocat curentul
închizându-se prin T1 şi dioda de fugă D1. Cazul când ambele tranzistoare sunt blocate şi curentul
de fază se închide prin diodele de fugă D1 şi D2 este dat în Fig. 14d.
Strategia de comandă prezentată în Fig.14 nu asigură schimbul de energie între bobină şi
sursă decât la sfârşitul ciclului de alimentare a fazei când tensiunea de fază este inversă. În timpul
ciclului de lucru când tranzistorul T2 este blocat tensiunea pe fază devine zero şi energia acumulată
în bobină este circulată în motor, deci nu este recirculată spre sursă. În această situaţie nu există, în
timpul ciclului, variaţii de tensiune pe condensatorul din circuitul intermediar de curent continuu şi
pierderile de comutaţie se reduc. Dar în acest caz curentul se stinge mai încet şi rezultă o „coadă” de
curent mai lungă ceea ce este defavorabil funcţionării motorului.
Există şi convertoare cu mai puţine tranzistoare şi diode de fugă, cum sunt spre exemplu
cele date în Fig. 15 şi Fig. 16 dar în aceste cazuri nu se mai asigură totala independenţă a fazelor
existând elementele de comutaţie comune tuturor fazelor.
Fig.15 Punte asimetrică trifazată pentru alimentarea SRM cu patru tranzistoare.
Fig.16 Punte asimetrică trifazată pentru alimentarea SRM cu condensator de
descărcare ( C dump convertor).

14
În cazul convertorului dat în Fig. 15 tranzistorul T este comun pentru toate fazele, ca şi
dioda de fugă D, şi conduce tot timpul. Convertorul poate funcţiona în ambele strategii, circuitul
pentru faza 1 de exemplu fiind realizat cu tranzistoarele T şi T1 şi cu diodele D şi D1. Deci T şi T1
pot conduce sau pot fi blocate în acelaşi timp, strategia prezentată în Fig. 13, sau T conduce tot
timpul şi doar T1 operează în modul PWM, strategia prezentată în Fig. 14. Procesul este similar la
celelalte faze, tranzistorul T şi dioda D fiind comune la toate fazele.
În cazul convertorului dat în Fig. 16 fiecare fază are un singur tranzistor iar circuitul de fugă
este realizat cu o diodă şi condensatorul CD. Tensiunea pe condensatorul CD este controlată la o
valoare medie egală cu dublul tensiunii sursei cu un variator de tensiune continuă realizat cu
tranzistorul T, dioda D şi bobina LD. Energia recirculată spre sursă reprezintă o parte mare din
energia totală, deci componentele variatorului trebuiesc dimensionate adecvat. Un defect în circuitul
variatorului permite încărcarea necontrolată a condensatorului CD cu consecinţe catastrofice, cum
afirmă Miller [ M*].
Funcţionarea în regim de generator a maşinii cu reluctanţă variabilă comutată electronic este
posibilă, cum s-a arătat deja, Fig. 3, atunci când inductanţa fazei energizate începe să scadă. În
aceste condiţii cuplul electromagnetic schimbă de semn şi maşina generează energie spre sursă. Este
absolut necesar ca maşina să fie excitată, când conduc tranzistoarele, pentru ca puterea generată să
fie returnată apoi sursei prin diodele de fugă în timpul scăderii fluxului prin fază. Energia returnată
depăşeşte energia primită, diferenţa fiind asigurată de energia primită de la motorul de antrenare.
Toate convertoarele prezentate, Fig. 11, Fig. 15 şi Fig. 16 asigură, în principiu, transferul de energie
spre sursă, cu condiţia ca redresorul să poată trece în regim de invertor în cazul când sursa este
reţeaua. Când sursa şi consumatorul sunt de curent continuu, circuitele lor se pot separa, spre
exemplu circuitele date în Fig. 17 şi Fig. 18, prezentate numai pentru o fază.
Fig.17 Circuite separate sursă-sarcină cu creşterea tensiunii pe sarcină( boost
converter).
15
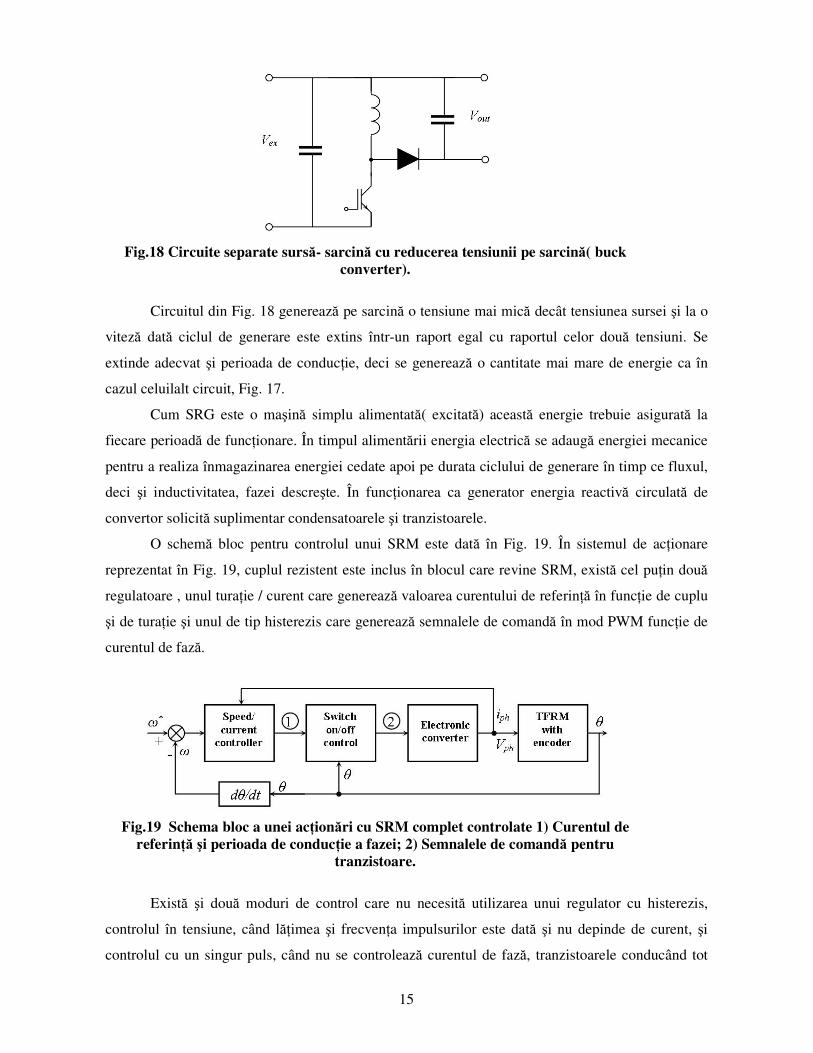
Fig.18 Circuite separate sursă- sarcină cu reducerea tensiunii pe sarcină( buck
converter).
Circuitul din Fig. 18 generează pe sarcină o tensiune mai mică decât tensiunea sursei şi la o
viteză dată ciclul de generare este extins într-un raport egal cu raportul celor două tensiuni. Se
extinde adecvat şi perioada de conducţie, deci se generează o cantitate mai mare de energie ca în
cazul celuilalt circuit, Fig. 17.
Cum SRG este o maşină simplu alimentată( excitată) această energie trebuie asigurată la
fiecare perioadă de funcţionare. În timpul alimentării energia electrică se adaugă energiei mecanice
pentru a realiza înmagazinarea energiei cedate apoi pe durata ciclului de generare în timp ce fluxul,
deci şi inductivitatea, fazei descreşte. În funcţionarea ca generator energia reactivă circulată de
convertor solicită suplimentar condensatoarele şi tranzistoarele.
O schemă bloc pentru controlul unui SRM este dată în Fig. 19. În sistemul de acţionare
reprezentat în Fig. 19, cuplul rezistent este inclus în blocul care revine SRM, există cel puţin două
regulatoare , unul turaţie / curent care generează valoarea curentului de referinţă în funcţie de cuplu
şi de turaţie şi unul de tip histerezis care generează semnalele de comandă în mod PWM funcţie de
curentul de fază.
Fig.19 Schema bloc a unei acţionări cu SRM complet controlate 1) Curentul de
referinţă şi perioada de conducţie a fazei; 2) Semnalele de comandă pentru
tranzistoare.
Există şi două moduri de control care nu necesită utilizarea unui regulator cu histerezis,
controlul în tensiune, când lăţimea şi frecvenţa impulsurilor este dată şi nu depinde de curent, şi
controlul cu un singur puls, când nu se controlează curentul de fază, tranzistoarele conducând tot

16
timpul perioadei care corespunde alimentării unei faze. Aceste două variante sunt mai simple decât
prima, comanda PWM în curent, dar şi mai puţin performante. În toate cazurile durata de alimentare
a unei faze depinde de viteză li este limitată ca timp, pentru regimul de motor, de timpul necesar
rotorului de a trece din poziţia nealiniată( sau aproape nealiniată) faţă de faza ce se alimentează
până în poziţia aliniată. Deci în cazul unui SRM cu 6/4 poli perioada de conducţie a unei faze este
egală cu timpul necesar rotorului să se rotească cu aproximativ )45 ° , Fig. 3. Alimentarea fiecărei
faze statorice, făcută secvenţial, trebuie să fie perfect sincronizată cu poziţia rotorului. Deci această
poziţie se cere cunoscută, fie prin detectarea directă de la un encoder fixat pe axul motorului, fie
prin calcularea ei utilizând o metodă de estimare , când nu se prevede un encoder pe axul motorului.
Acesta este în principiu cazul acţionărilor de putere mică, la care costul encoderului este important
raportat la costul sistemului, sau / şi a celor care nu trebuie să aibă performanţe foarte bune.
Există, principial două clase de metode de estimare a poziţiei rotorului:
i). Metode de calcul în care se utilizează valorile măsurate ale tensiunii şi curentului
fazelor maşinii.
ii). Metode de calcul care utilizează informaţii obţinute prin aplicarea unor tensiuni de
frecvenţă ridicată, diferite de cele de alimentare de forţă, la fazele maşinii.
Fără a intra în detalii, se poate apela la bibliografia recomandată, se vor prezenta doar
metodele cele mai utilizate din prima clasă, care sunt:
i). Estimarea bazată pe variaţia inductanţei fazei.
ii). Estimarea bazată pe măsurarea tensiunii electromotoare induse.
iii).Estimarea bazată pe utilizarea sistemelor cu observatori.
Ultima categorie conţine metodele care asigură o precizie ridicată, dar care necesită şi o
putere de calcul ridicată, deci un cost mai mare.
MAŞINI CU POLI APARENŢI PE STATOR ŞI ROTOR ŞI EXCITAŢIE
CU MAGNEŢI PERMANENŢI
Aceste maşini, numite generic şi DSPM machines( DSPM machines= double salient permanent
magnet machines) cu simbolul pentru motor DSPMM, au poli aparenţi atât pe stator cât şi pe rotor
ca şi în cazul SRM, dar sunt prevăzute cu o excitaţie cu magneţi permanenţi, plasaţi în diferite
moduri. Prima maşină de acest tip a fost realizată în deceniul al şaselea al secolului trecut de Rauch
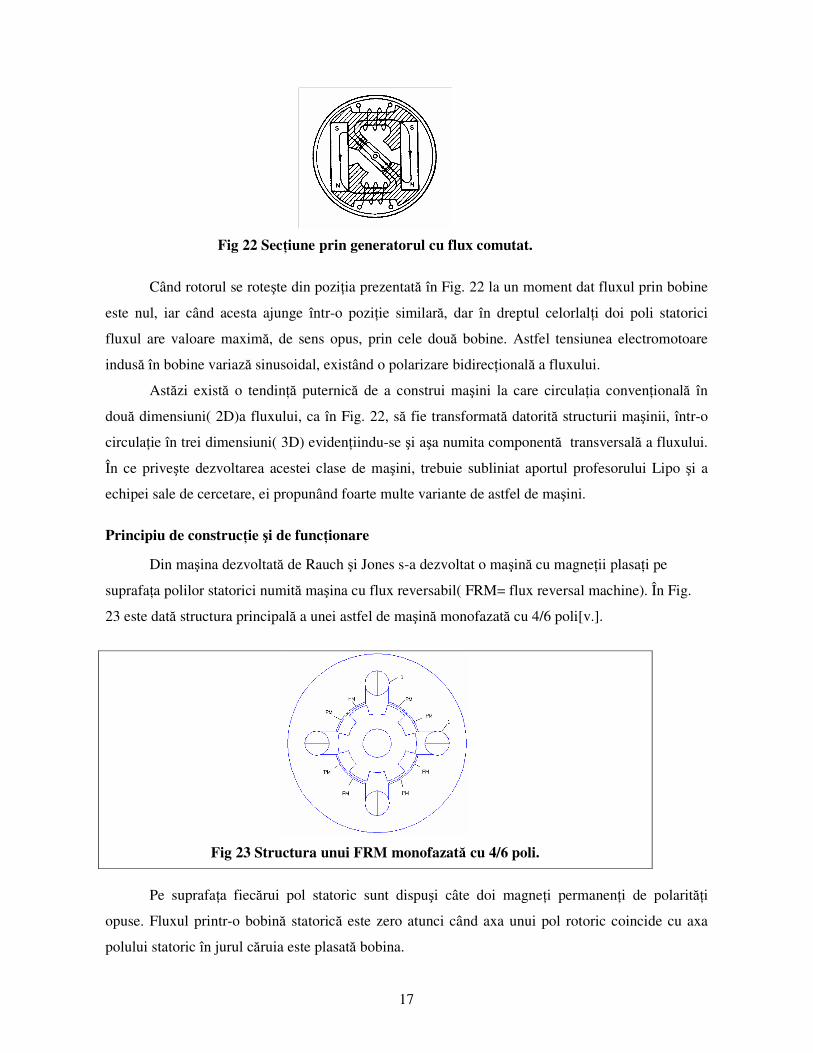
şi Jonson şi s-a numit maşina cu flux comutat[ R1]. O secţiune prin această maşină este dată în Fig.
22. Principiul de funcţionare al maşinii monofazate cu doi magneţi de tip Alnico şi două bobine ce
pot fi conectate în serie sau în paralel, este evident.
17
Fig 22 Secţiune prin generatorul cu flux comutat.
Când rotorul se roteşte din poziţia prezentată în Fig. 22 la un moment dat fluxul prin bobine
este nul, iar când acesta ajunge într-o poziţie similară, dar în dreptul celorlalţi doi poli statorici
fluxul are valoare maximă, de sens opus, prin cele două bobine. Astfel tensiunea electromotoare
indusă în bobine variază sinusoidal, existând o polarizare bidirecţională a fluxului.
Astăzi există o tendinţă puternică de a construi maşini la care circulaţia convenţională în
două dimensiuni( 2D)a fluxului, ca în Fig. 22, să fie transformată datorită structurii maşinii, într-o
circulaţie în trei dimensiuni( 3D) evidenţiindu-se şi aşa numita componentă transversală a fluxului.
În ce priveşte dezvoltarea acestei clase de maşini, trebuie subliniat aportul profesorului Lipo şi a
echipei sale de cercetare, ei propunând foarte multe variante de astfel de maşini.
Principiu de construcţie şi de funcţionare
Din maşina dezvoltată de Rauch şi Jones s-a dezvoltat o maşină cu magneţii plasaţi pe
suprafaţa polilor statorici numită maşina cu flux reversabil( FRM= flux reversal machine). În Fig.
23 este dată structura principală a unei astfel de maşină monofazată cu 4/6 poli[v.].
Fig 23 Structura unui FRM monofazată cu 4/6 poli.
Pe suprafaţa fiecărui pol statoric sunt dispuşi câte doi magneţi permanenţi de polarităţi
opuse. Fluxul printr-o bobină statorică este zero atunci când axa unui pol rotoric coincide cu axa
polului statoric în jurul căruia este plasată bobina.

18
Fluxul prin bobină schimbă de semn la deplasarea rotorului cu un unghi egal cu jumătatea
pasului polar rotoric, R
Q/π unde QR este numărul de poli rotorici. Lăţimea polului statoric este
dublă faţă de lăţimea polului rotoric î timp ce deschiderile de crestătură de pe stator şi de pe rotor
sunt egale.
Relaţia dintre numerele de poli statoric QS şi rotoric QR şi numărul de faze m este:
1+
=m
m
Q
Q
R
S (3)
unde m=2 pentru maşina monofazată. Deci în afară de numărul de poli din exemplul considerat, 4/6
maşini monofazate se pot realiza cu 2/3 poli cu 8/12 poli şi aşa mai departe. Pentru maşinile
trifazate numărul de poli poate fi 6/8, 12/16, etc.
Inductanţa fazei este mică şi în consecinţă cuplul electromagnetic de tip reluctant este şi el
mic, dar sunt mari cuplurile de tip de blocare( agăţare) datorate prezenţei magneţilor permanenţi.
Pentru reducerea acestora se realizează polii rotorici înclinaţi faţă de generatoare, ca în cazul
crestăturilor rotorice la maşinile de inducţie cu rotor în colivie. Prin înclinare însă se reduce şi
cuplul electromagnetic. FRM poate fi utilizat ca generator la puteri relativ mici. În Fig. 24 este
prezentată tensiunea electromotoare indusă în bobina 1 a maşinii date în 23, poziţia iniţială a
rotorului fiind cea din figură. Tensiunea electromotoare indusă s-a calculat cu metoda elementului
finit ( MEF ) pentru o viteză a rotorului de 1200 rot/ min.
0
1
2
3
4
5
6
7
0 3 6 9 12 15 18 21 24
degrees
e1
[V
]
Fig 24Tensiunea electromotoare indusă în bobina 1 a FRM din Fig. 23 funcţie de
poziţia rotorului, viteza rotorului n=1200 rot/ min., 120 spire pe bobină.
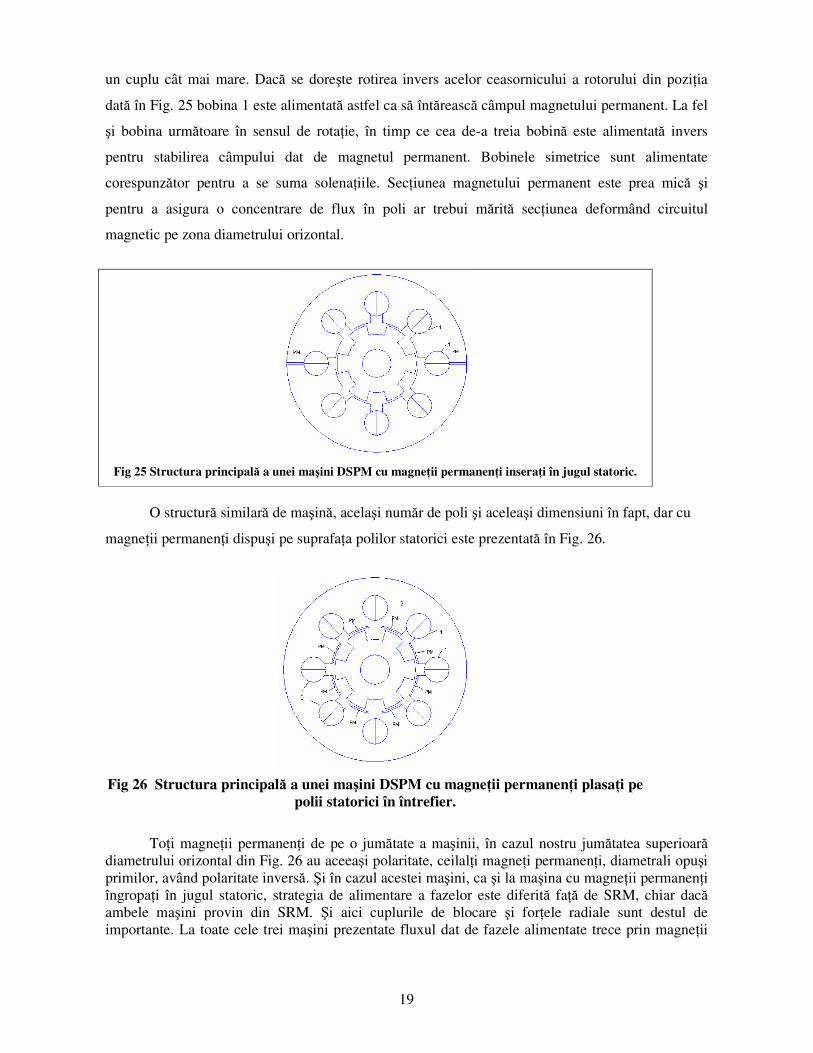
O altă variantă de maşină cu magneţii permanenţi plasaţi în stator este prezentată în Fig. 25.
Această maşină are 8/6 poli şi provine dintr-un SRM la care s-au adăugat doi magneţi permanenţi
în stator având ambii aceeaşi polaritate, adică, spre exemplu nord pe faţa superioară. Şi în acest caz
există, ca şi la FRM, forţe radiale şi cupluri de blocare importante. În absenţa curenţilor din bobine
rotorul se poziţionează într-o poziţie de echilibru, poziţia din Fig. 25.Modul de alimentare al fazelor
este diferit de cel întâlnit la SRM. În acest caz trebuie alimentate toate cele trei faze pentru a obţine
19
un cuplu cât mai mare. Dacă se doreşte rotirea invers acelor ceasornicului a rotorului din poziţia
dată în Fig. 25 bobina 1 este alimentată astfel ca să întărească câmpul magnetului permanent. La fel
şi bobina următoare în sensul de rotaţie, în timp ce cea de-a treia bobină este alimentată invers
pentru stabilirea câmpului dat de magnetul permanent. Bobinele simetrice sunt alimentate
corespunzător pentru a se suma solenaţiile. Secţiunea magnetului permanent este prea mică şi
pentru a asigura o concentrare de flux în poli ar trebui mărită secţiunea deformând circuitul
magnetic pe zona diametrului orizontal.
Fig 25 Structura principală a unei maşini DSPM cu magneţii permanenţi inseraţi în jugul statoric.
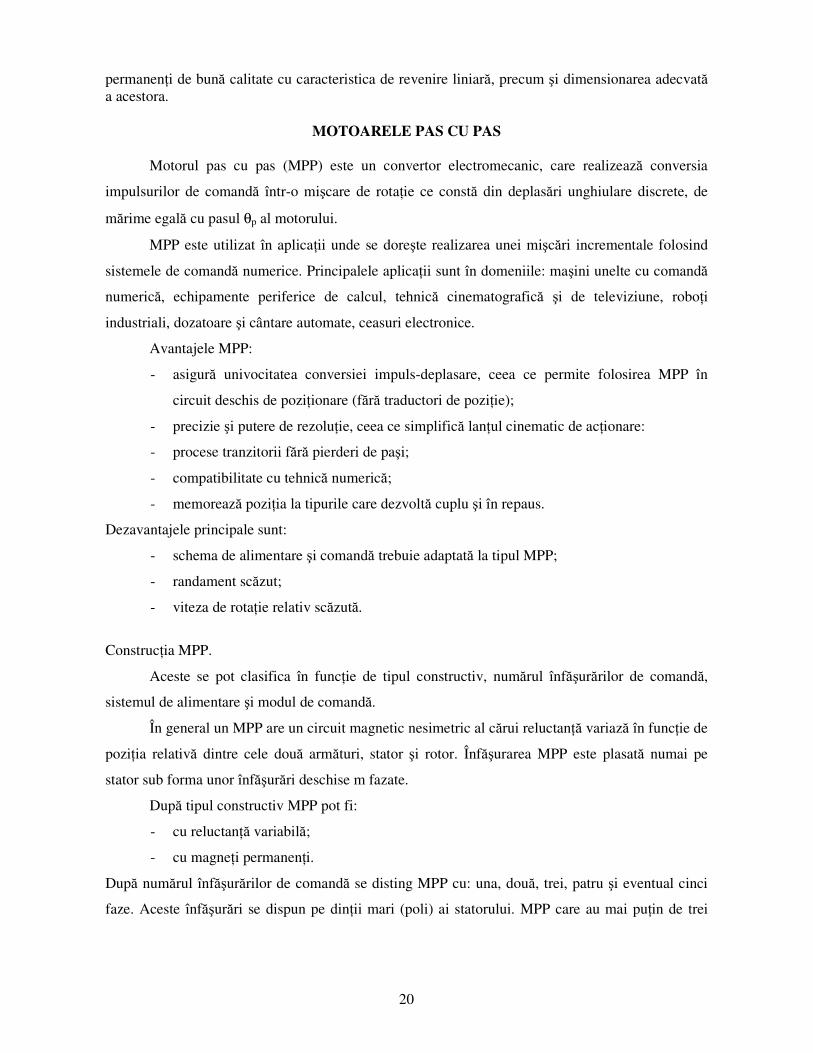
O structură similară de maşină, acelaşi număr de poli şi aceleaşi dimensiuni în fapt, dar cu
magneţii permanenţi dispuşi pe suprafaţa polilor statorici este prezentată în Fig. 26.
Fig 26 Structura principală a unei maşini DSPM cu magneţii permanenţi plasaţi pe
polii statorici în întrefier.
Toţi magneţii permanenţi de pe o jumătate a maşinii, în cazul nostru jumătatea superioară diametrului orizontal din Fig. 26 au aceeaşi polaritate, ceilalţi magneţi permanenţi, diametrali opuşi primilor, având polaritate inversă. Şi în cazul acestei maşini, ca şi la maşina cu magneţii permanenţi îngropaţi în jugul statoric, strategia de alimentare a fazelor este diferită faţă de SRM, chiar dacă ambele maşini provin din SRM. Şi aici cuplurile de blocare şi forţele radiale sunt destul de importante. La toate cele trei maşini prezentate fluxul dat de fazele alimentate trece prin magneţii
20
permanenţi de bună calitate cu caracteristica de revenire liniară, precum şi dimensionarea adecvată a acestora.
MOTOARELE PAS CU PAS Motorul pas cu pas (MPP) este un convertor electromecanic, care realizează conversia
impulsurilor de comandă într-o mişcare de rotaţie ce constă din deplasări unghiulare discrete, de
mărime egală cu pasul θp al motorului.
MPP este utilizat în aplicaţii unde se doreşte realizarea unei mişcări incrementale folosind
sistemele de comandă numerice. Principalele aplicaţii sunt în domeniile: maşini unelte cu comandă
numerică, echipamente periferice de calcul, tehnică cinematografică şi de televiziune, roboţi
industriali, dozatoare şi cântare automate, ceasuri electronice.
Avantajele MPP:
- asigură univocitatea conversiei impuls-deplasare, ceea ce permite folosirea MPP în
circuit deschis de poziţionare (fără traductori de poziţie);
- precizie şi putere de rezoluţie, ceea ce simplifică lanţul cinematic de acţionare:
- procese tranzitorii fără pierderi de paşi;
- compatibilitate cu tehnică numerică;
- memorează poziţia la tipurile care dezvoltă cuplu şi în repaus.
Dezavantajele principale sunt:
- schema de alimentare şi comandă trebuie adaptată la tipul MPP;
- randament scăzut;
- viteza de rotaţie relativ scăzută.
Construcţia MPP.
Aceste se pot clasifica în funcţie de tipul constructiv, numărul înfăşurărilor de comandă,
sistemul de alimentare şi modul de comandă.
În general un MPP are un circuit magnetic nesimetric al cărui reluctanţă variază în funcţie de
poziţia relativă dintre cele două armături, stator şi rotor. Înfăşurarea MPP este plasată numai pe
stator sub forma unor înfăşurări deschise m fazate.
După tipul constructiv MPP pot fi:
- cu reluctanţă variabilă;
- cu magneţi permanenţi.
După numărul înfăşurărilor de comandă se disting MPP cu: una, două, trei, patru şi eventual cinci
faze. Aceste înfăşurări se dispun pe dinţii mari (poli) ai statorului. MPP care au mai puţin de trei
21
faze (m < 3) se construiesc cu dinţi rotorici (sau statorici) nesimetrici şi se pot roti numai într-o
direcţie.
MPP cu reluctanţă variabilă.
Sunt de două tipuri: monostatorice (cu o singură unitate stator-rotor) şi polistatorice (cu mai
multe unităţi stator-rotor). Ambele tipuri pot fi: cu întrefier axial sau radial; cu mişcare de rotaţie
sau liniară. MPP cu reluctanţă variabilă se pot construi cu minimum m= 2 faze.
Utilizarea MPP cu reluctanţă variabilă se caracterizează prin următoarele avantaje:
construcţie mecanică simplă;
frecvenţă de comandă ridicată şi viteză de rotaţie relativ ridicată.
Principalele dezavantaje ale acestor tipuri de motoare sunt:
lipsa cuplului în absenţa curentului de comandă;
efectuarea unghiului de pas cu oscilaţii importante în special în cazul alimentării
în secvenţă simplă.
MPP cu reluctanţă variabilă şi magnet permanent.
Această variantă constructivă se mai numesc şi MPP hibride. Aceste motoare se pot construi şi cu o
singură înfăşurare (monofazată). Prezenţa magnetului permanent determină următoarele avantaje
faţă de tipul precedent:
motorul are cuplu şi în repaus, deci poziţia rotorului este reţinută;
cuplul motorului este mai mare datorită componenţei de cuplu dat de magnet;
pasul este executat fără prea mari oscilaţii.
MPP hibride pot fi construite cu magnetul pe stator sau pe rotor. Câmpul creat de acesta are
caracterul unui câmp homopolar. Folosirea lor pe stator permite înlocuirea unor înfăşurări de
comandă.
Dezavantajele ale acestor motoare hibride:
performanţele sunt influenţate de schimbările caracteristicilor magneţilor;
valoarea relativ ridicată a t.e.m. indusă în fazele statorice ale MPP;
creşterea inerţiei din cauza magneţilor;
micşorarea frecvenţei de comandă.
Mărimile caracteristice ale MPP.
Acestea sunt: unghi de pas, cuplul sincronizat static maxim, variaţia cuplului cu poziţia rotorului şi
numărul de paşi pe o rotaţie
Cuplul static sincronizat:
dt
d
p
F
dt
d
p
JTT
r
v
r
sr
θθ+=−
2
2

22
unde, Tsr este cuplul static rezistent, J momentul de inerţie polar al maselor în mişcare, Fν este
coeficientul de frecări vâscoase, pr, numărul de paşi pe o rotaţie.
Numărul de paşi pe o rotaţie pe o rotaţie este determinat de unghiul de pas θp:
p
rpθ
π2=
Cuplul dinamic (T-Tr) serveşte pentru accelerarea rotorului şi învingerea frecărilor proprii.
Viteza de rotaţie a MPP este:
dt
d
pr
θ1=Ω
În variaţia unghiului θ la efectuarea pasului, în urma aplicării tensiunii de comandă, se
disting două mărimi: timpul de efectuare a unui pas tp, definit de la aplicarea comenzii şi până la
atingerea prima dată a noii poziţii de echilibru şi unghiul dinamic de sarcină (denumit şi unghi de
suprareglare), δ, care reprezintă devierea unghiulară maximă a poziţiei rotorului faţă de punctul de
echilibru stabil. Eroarea de pas ∆θp reprezintă abaterea unghiulară sistematică maximă,
necumulativă faţă de valoarea unghiulară nominală a pasului.
Related Documents











