Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal Capítulo 3‐ Resposta no Tempo Cap 3 – Resposta no Tempo Maria Isabel Ribeiro António Pascoal Março de 2008 Transparências de apoio às aulas teóricas Todos os direitos reservados Estas notas não podem ser usadas para fins distintos daqueles para que foram elaboradas (leccionação no Instituto Superior Técnico) sem autorização dos autores CONTROLO 2º semestre – 2007/2008

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Cap 3 – Resposta no Tempo
Maria Isabel RibeiroAntónio PascoalMarço de 2008
Transparências de apoio às aulas teóricas
Todos os direitos reservadosEstas notas não podem ser usadas para fins distintos daqueles para que foram
elaboradas (leccionação no Instituto Superior Técnico) sem autorização dos autores
CONTROLO2º semestre – 2007/2008
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Objectivos
• Rever conceitos sobre a resposta no tempo de SLITs
• Pólos, zeros, ganho estático e a resposta dinâmica deSLITs
• Caracterização da resposta de sistema de 1ª e 2ª ordem e ordem superior
• Sistemas de fase não mínima
• Relação tempo‐frequência
Referênciaso Cap.3 – do livro de Franklin, Powel, Naemi (referência principal)
o Sinais e Sistemas, Isabel Lourtie, Escolar Editora (para revisão de conceitos sobre TL)
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
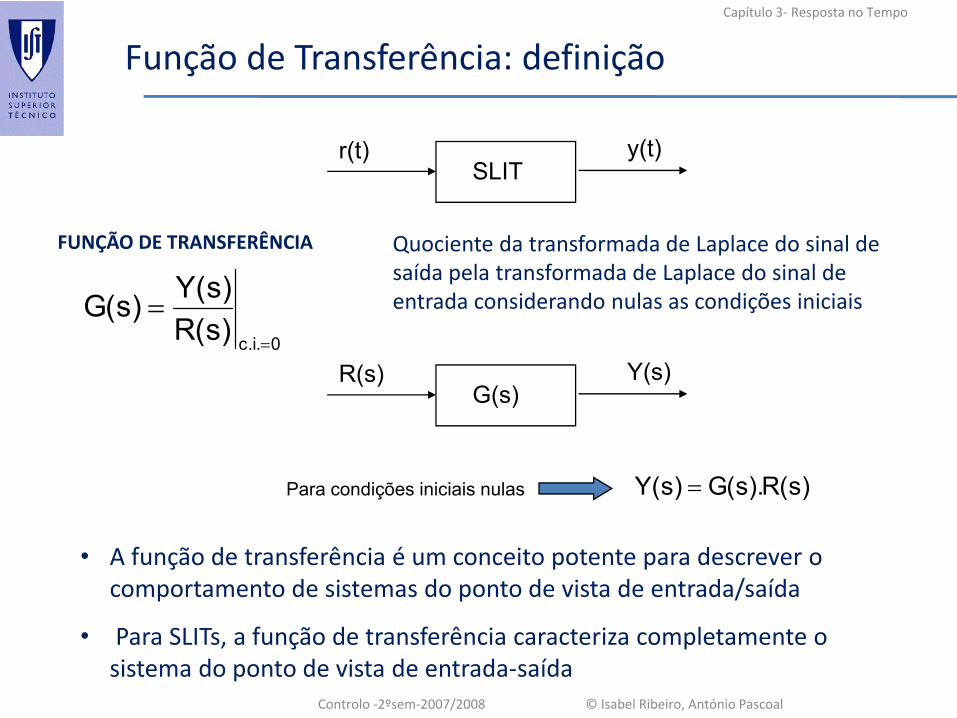
Função de Transferência: definição
SLITr(t) y(t)
FUNÇÃO DE TRANSFERÊNCIA
0.i.c)s(R)s(Y)s(G
=
=
G(s)R(s) Y(s)
Para condições iniciais nulas )s(R).s(G)s(Y =
• A função de transferência é um conceito potente para descrever o comportamento de sistemas do ponto de vista de entrada/saída
• Para SLITs, a função de transferência caracteriza completamente osistema do ponto de vista de entrada‐saída
Quociente da transformada de Laplace do sinal de saída pela transformada de Laplace do sinal de entrada considerando nulas as condições iniciais
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Resposta no Tempo
SLITr(t) y(t)
Uma maneira de resolver o problema
Resolver a equação diferencial que é a representação do comportamento de entrada‐saída
Dados •a equação diferencial que representa um modelo do SLIT•a entrada r(t)•as condições iniciaisPretende‐se:• Conhecer a evolução temporal da saída, y(t)
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Função de Transferência e a Resposta no Tempo
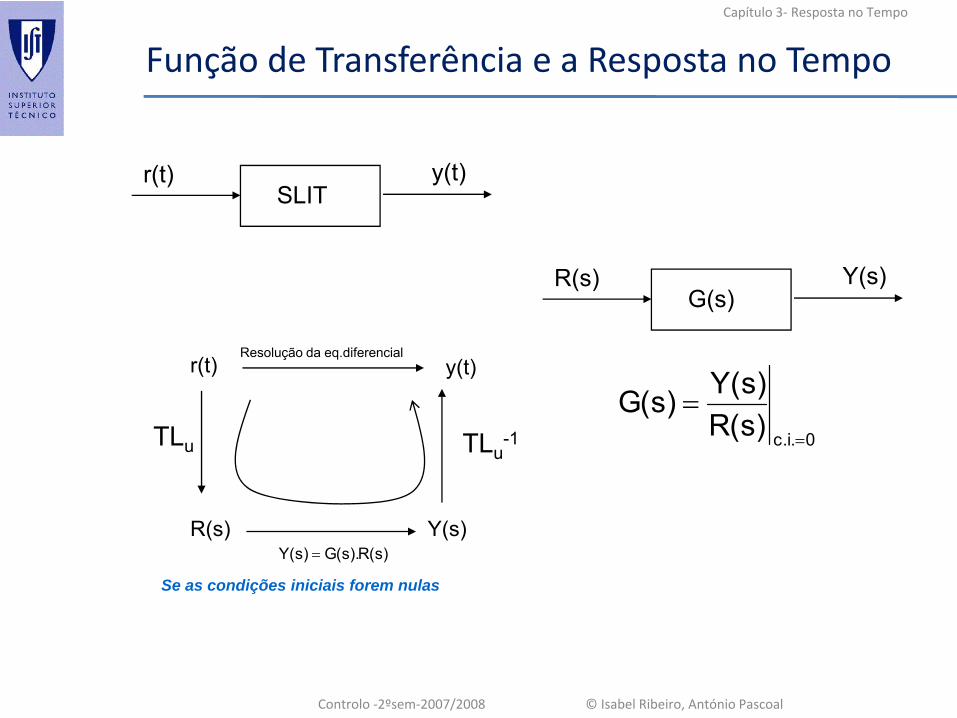
SLITr(t) y(t)
0.i.c)s(R)s(Y)s(G
=
=
G(s)R(s) Y(s)
r(t) y(t)
R(s) Y(s)
TLu TLu-1
)s(R).s(G)s(Y =
Se as condições iniciais forem nulas
Resolução da eq.diferencial
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no TempoResposta no tempo a partir da FT: exemplo de sistema de 1ª ordem
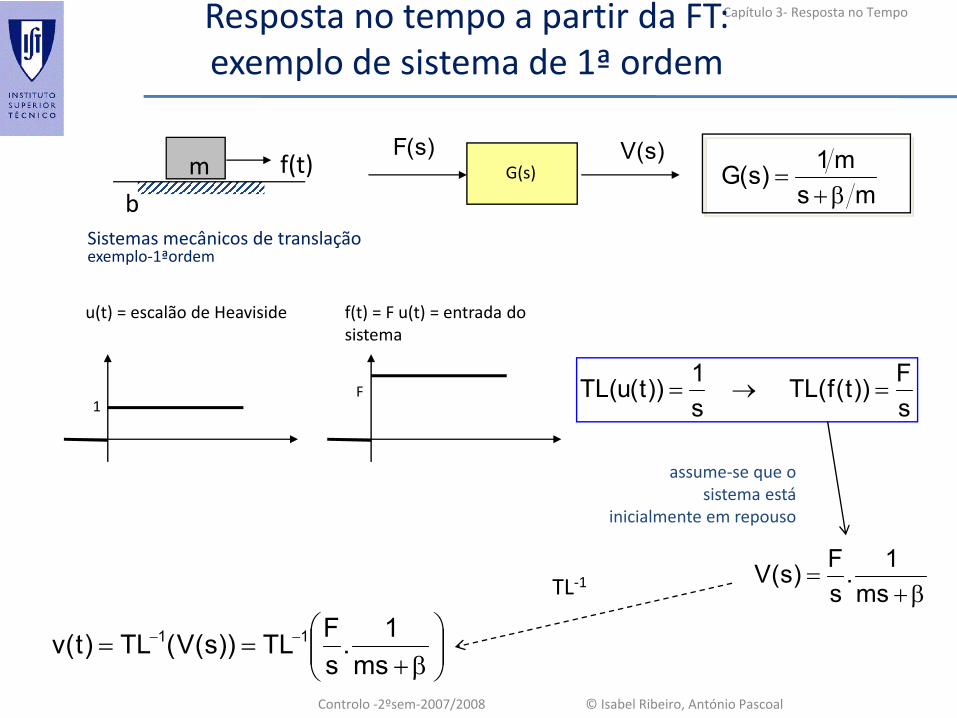
Sistemas mecânicos de translaçãoexemplo‐1ªordem
msm1)s(Gβ+
=b
m f(t) )s(VG(s)
)s(F
u(t) = escalão de Heaviside
1 sF))t(f(TL
s1))t(u(TL =→=
β+=
ms1.
sF)s(V
⎟⎟⎠
⎞⎜⎜⎝
⎛β+
== −−
ms1.
sFTL))s(V(TL)t(v 11
TL‐1
f(t) = F u(t) = entrada do sistema
F
assume‐se que o sistema está
inicialmente em repouso
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
βF
F
saída
β1
Ganho emregime estacionário
Resposta no tempo a partir da FT: exemplo de sistema de 1ª ordem
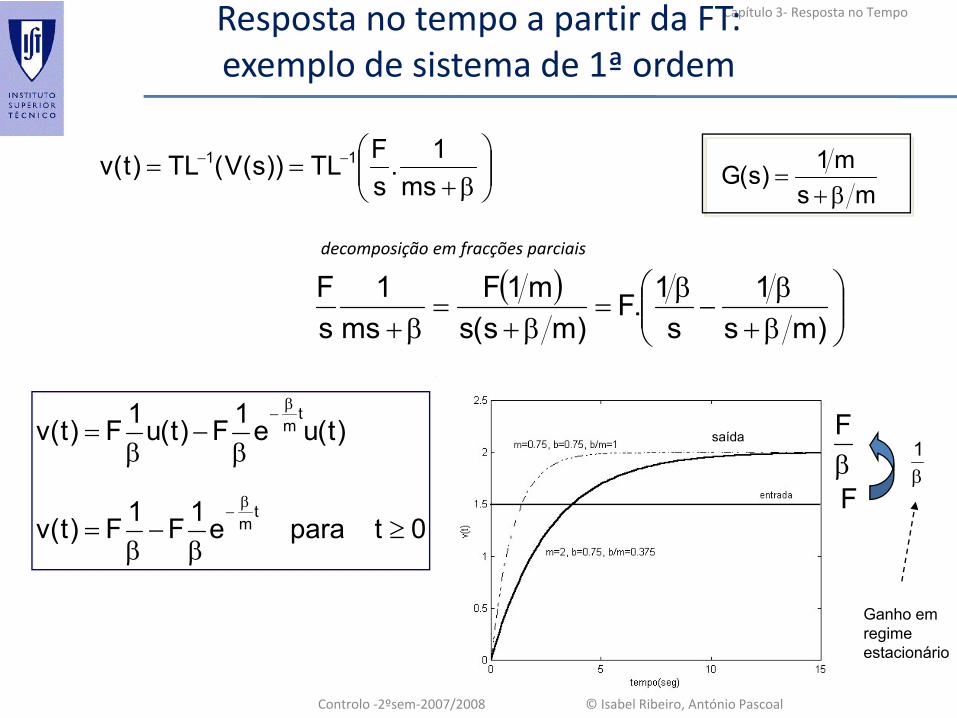
⎟⎟⎠
⎞⎜⎜⎝
⎛β+
== −−
ms1.
sFTL))s(V(TL)t(v 11
( )⎟⎟⎠
⎞⎜⎜⎝
⎛β+β
−β
=β+
=β+ )ms
1s
1.F)ms(s
m1Fms
1sFdecomposição em fracções parciais
0t para e1F1F)t(v
)t(ue1F)t(u1F)t(v
tm
tm
≥β
−β
=
β−
β=
β−
β−
msm1)s(Gβ+
=
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
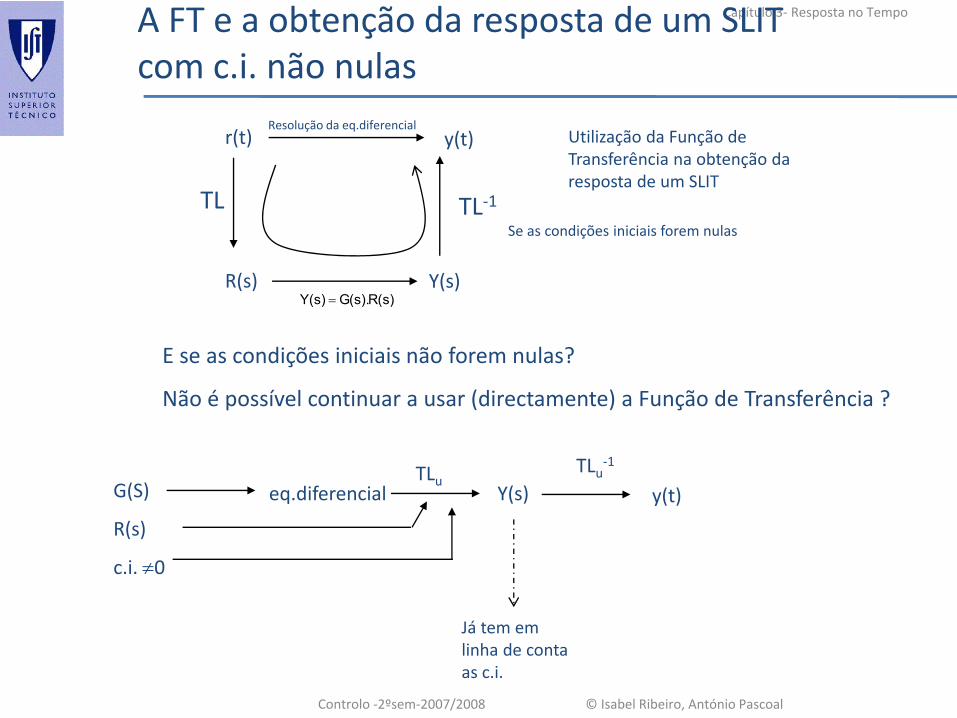
Capítulo 3‐ Resposta no TempoA FT e a obtenção da resposta de um SLIT com c.i. não nulas
Utilização da Função deTransferência na obtenção daresposta de um SLIT
r(t) y(t)
R(s) Y(s)
TL TL‐1
)s(R).s(G)s(Y =
Resolução da eq.diferencial
Se as condições iniciais forem nulas
E se as condições iniciais não forem nulas?
Não é possível continuar a usar (directamente) a Função de Transferência ?
G(S)
R(s)
c.i. ≠0
TLueq.diferencial Y(s) y(t)
TLu‐1
Já tem em linha de contaas c.i.
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
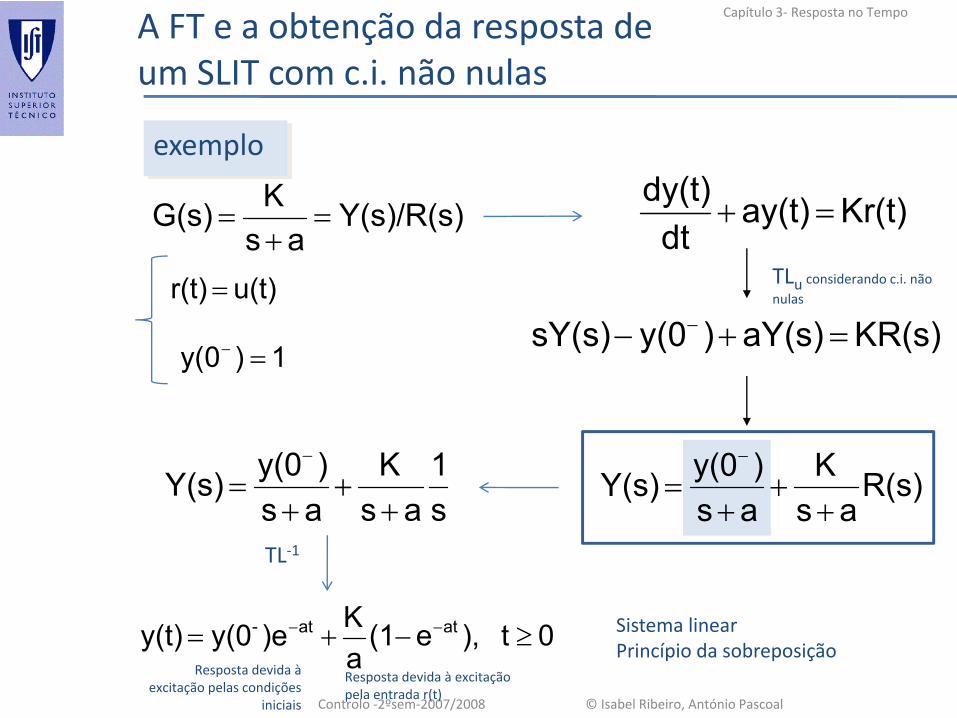
Capítulo 3‐ Resposta no TempoA FT e a obtenção da resposta de um SLIT com c.i. não nulas
exemplo
Y(s)/R(s)as
KG(s) =+
=
1)0(y =−
Kr(t)ay(t)dt
dy(t)=+
KR(s)aY(s))y(0sY(s) =+− −
R(s)as
Kas)y(0Y(s)
++
+=
−
0t ),e(1aK)ey(0y(t) atat- ≥−+= −−
TL‐1
TLu considerando c.i. não nulasu(t)r(t) =
Sistema linearPrincípio da sobreposição
s1
asK
as)y(0Y(s)
++
+=
−
Resposta devida à excitação pelas condições
iniciais
Resposta devida à excitaçãopela entrada r(t)

Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Função de transferência: caso geral. Pólos e Zeros
G(s)R(s) Y(s)
n grau de polinómiom grau de polinómio
D(s)N(s)G(s) ==
001
1n1n
nn
011m
1mm
m Nnm, ,asasbsabsbsbsb
D(s)N(s)G(s) ∈
++++++++
== −−
−−
L
L
Função de transferência
• própria ⇔ n≥m
• estritamente própria⇔ n>m
• não própria ⇔ n<m
Só estudaremos este tipo de FT
Pólo do SLIT
λ∈C é um polo do sistema com FT própria G(s) sse |G(λ)|=∞
Zero do SLIT
λ∈C é um zero do sistema com FT própria G(s) sse |G(λ)|=0
Se N(s) e D(s) não tiverem factores comuns• Os pólos do sistema são os zeros de D(s)• Os zeros do sistema são as zeros de N(s)
cuidado ao cancelar factores comuns nospolinómios N(s) e D(s)
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
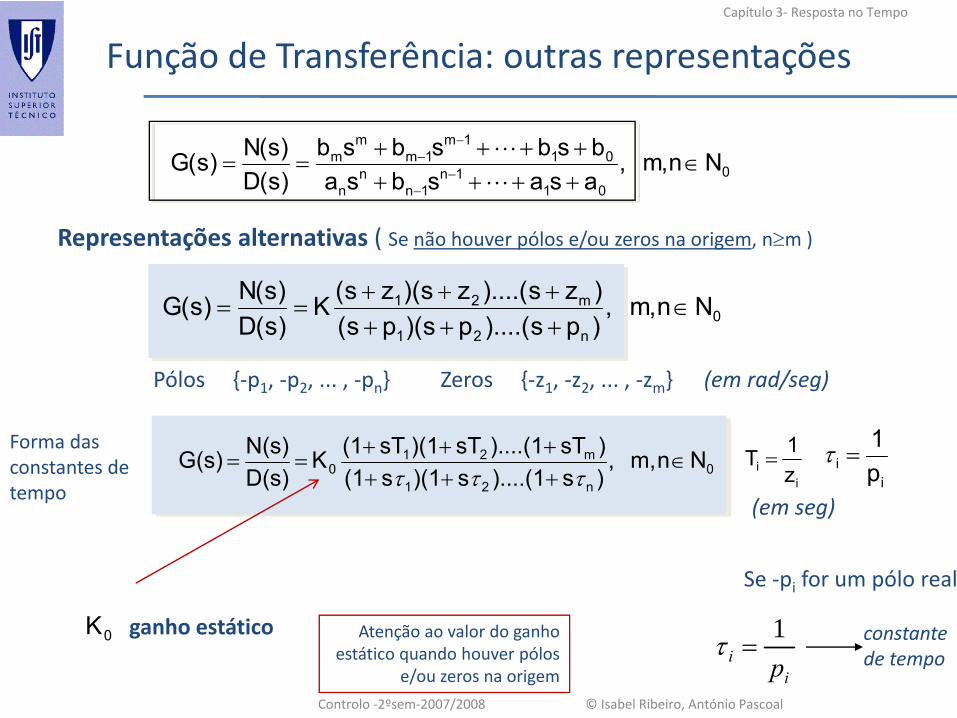
Função de Transferência: outras representações
001
1n1n
nn
011m
1mm
m Nn,m ,asasbsabsbsbsb
)s(D)s(N)s(G ∈
++++++++
== −−
−−
L
L
Representações alternativas ( Se não houver pólos e/ou zeros na origem, n≥m )
0n21
m21 Nn,m ,)ps)....(ps)(ps()zs)....(zs)(zs(K
)s(D)s(N)s(G ∈
++++++
==
ii p
1=τ
ii z
1T =
Pólos {‐p1, ‐p2, ... , ‐pn} Zeros {‐z1, ‐z2, ... , ‐zm}
Se ‐pi for um pólo real
constante de tempo
(em rad/seg)
(em seg)
ii p
1=τ
0n21
m210 Nnm, ,
)s)....(1s)(1s(1)sT)....(1sT)(1sT(1K
D(s)N(s)G(s) ∈
++++++
==τττ
Forma dasconstantes detempo
0K ganho estático Atenção ao valor do ganho estático quando houver pólos
e/ou zeros na origem
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
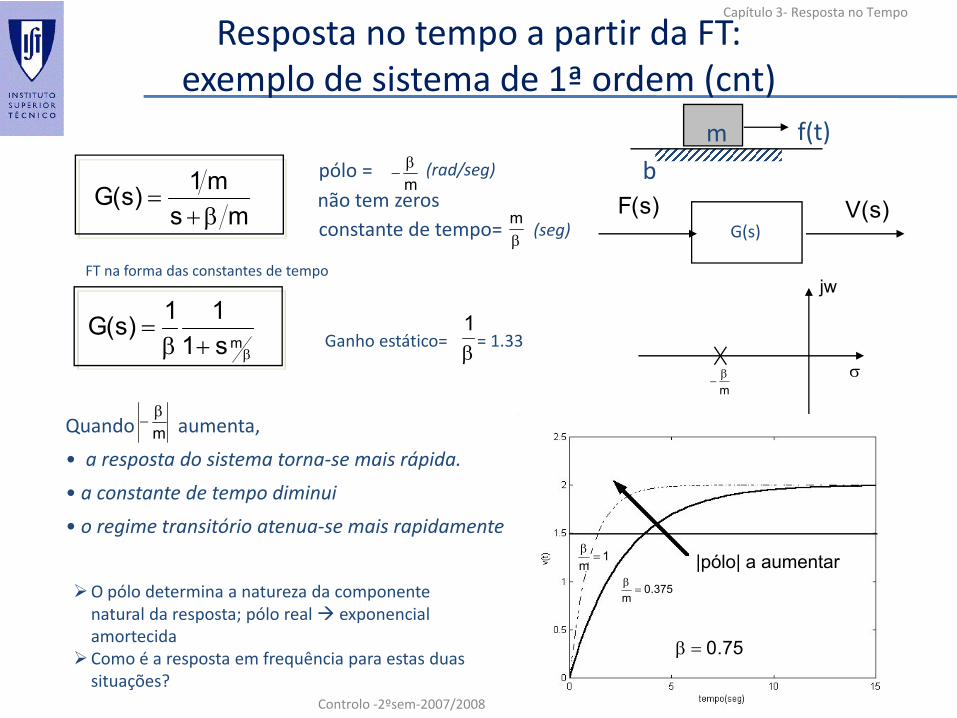
Resposta no tempo a partir da FT: exemplo de sistema de 1ª ordem (cnt)
msm1)s(Gβ+
=b
m f(t)
)s(VG(s)
)s(F
σ
jw
mβ
−
pólo =mβ
−
não tem zerosconstante de tempo=
βm
β+β=
ms111)s(G
FT na forma das constantes de tempo
Ganho estático= = 1.33β1
(seg)
(rad/seg)
Quando aumenta,
• a resposta do sistema torna‐se mais rápida.
• a constante de tempo diminui
• o regime transitório atenua‐se mais rapidamente
mβ
−
1m
=β
375.0m
=β
|pólo| a aumentar
75.0=β
O pólo determina a natureza da componente natural da resposta; pólo real exponencialamortecidaComo é a resposta em frequência para estas duas situações?
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
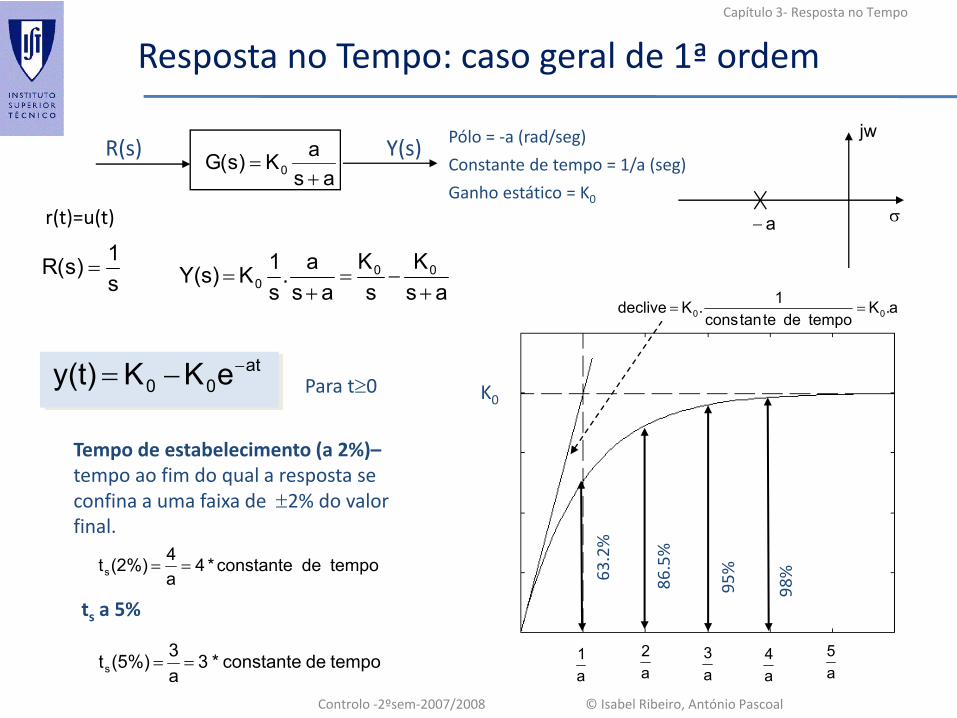
Resposta no Tempo: caso geral de 1ª ordem
R(s) Y(s)as
aK)s(G 0 +=
σ
jw
a−
Pólo = ‐a (rad/seg)
Constante de tempo = 1/a (seg)
Ganho estático = K0r(t)=u(t)
s1)s(R =
asK
sK
asa.
s1KY(s) 00
0 +−=
+=
at00 eKKy(t) −−= Para t≥0 K0
a1
a2
a3
a4
a5
a.Ktempo de tetancons
1.Kdeclive 00 ==
86.5%
Tempo de estabelecimento (a 2%)–tempo ao fim do qual a resposta se confina a uma faixa de ±2% do valor final.
tempo de constante*4a4(2%)ts ==
ts a 5%
tempo de constante * 3a3(5%)ts ==
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
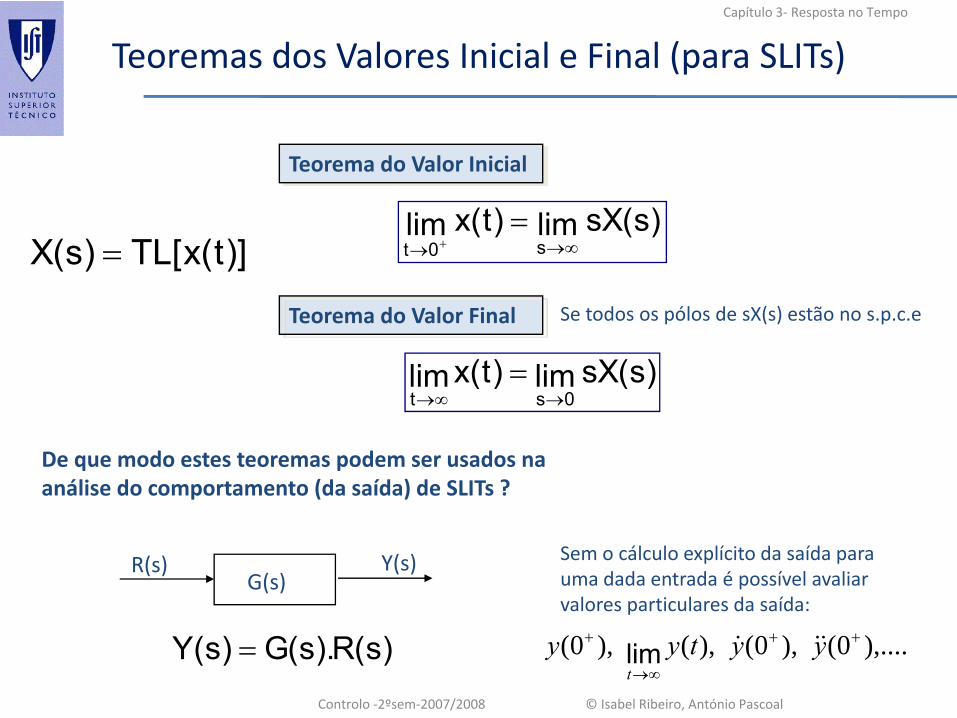
Teoremas dos Valores Inicial e Final (para SLITs)
)]t(x[TL)s(X =
De que modo estes teoremas podem ser usados na análise do comportamento (da saída) de SLITs ?
G(s)R(s) Y(s)
)s(R).s(G)s(Y =
Sem o cálculo explícito da saída para uma dada entrada é possível avaliar valores particulares da saída:
),....0(),0(),(),0( ++
∞→
+ yytyyt
&&& lim
Teorema do Valor Inicial
)s(sX lim)t(xlims0t ∞→→
=+
Teorema do Valor Final
)s(sX lim)t(xlim0st →∞→
=
Se todos os pólos de sX(s) estão no s.p.c.e

Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Teoremas dos Valores Inicial e Final (para SLITs)
no cálculo de características da saída de um SLIT
Valor Inicial da Saída
)s(R)s(sG lim)s(sY lim)t(ylimss0t ∞→∞→→
==+
Valor Final da saída)s(R)s(sG lim)s(sY lim)t(ylim
0s0st →→∞→==
G(s)R(s) Y(s)
Entrada escalão unitário
G(s) lims1sG(s) limy(t)lim
ss0t ∞→∞→→==
+s1R(s) =
Entrada escalão unitário
)s(G lims1)s(sG lim)t(ylim
0s0st →→∞→==
s1)s(R =
Valor do ganho emregime estacionário
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
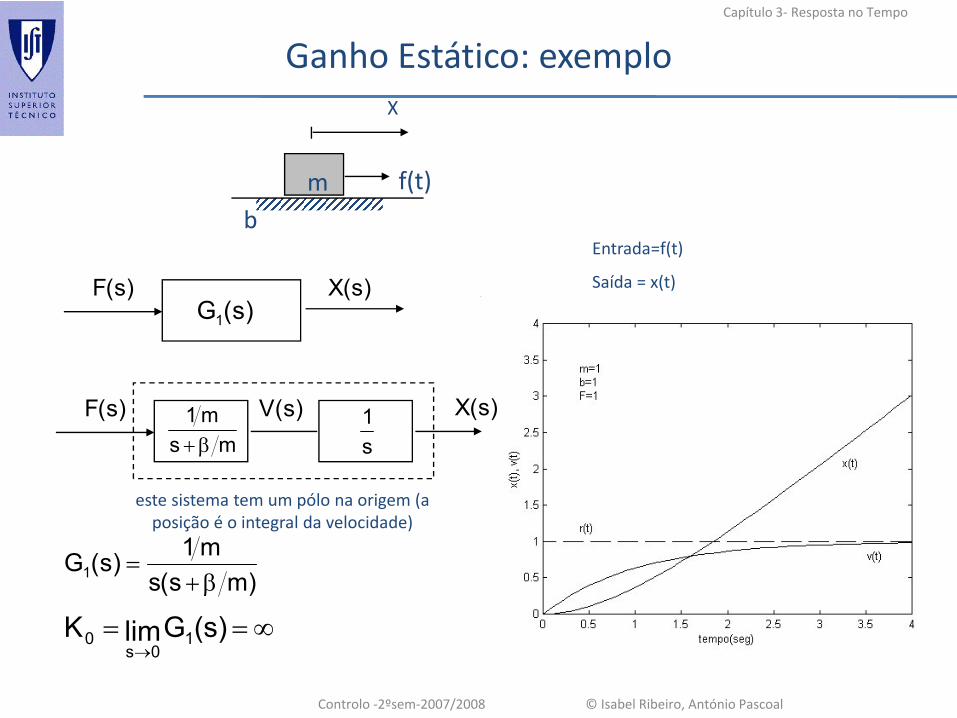
Ganho Estático: exemplo
bm f(t)
)s(X)s(F)s(G1
)s(V)s(Fms
m1β+
)s(Xs1
)ms(sm1)s(G1 β+
=
∞==→
(s)GlimK 10s
0
X
Entrada=f(t)
Saída = x(t)
este sistema tem um pólo na origem (aposição é o integral da velocidade)
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
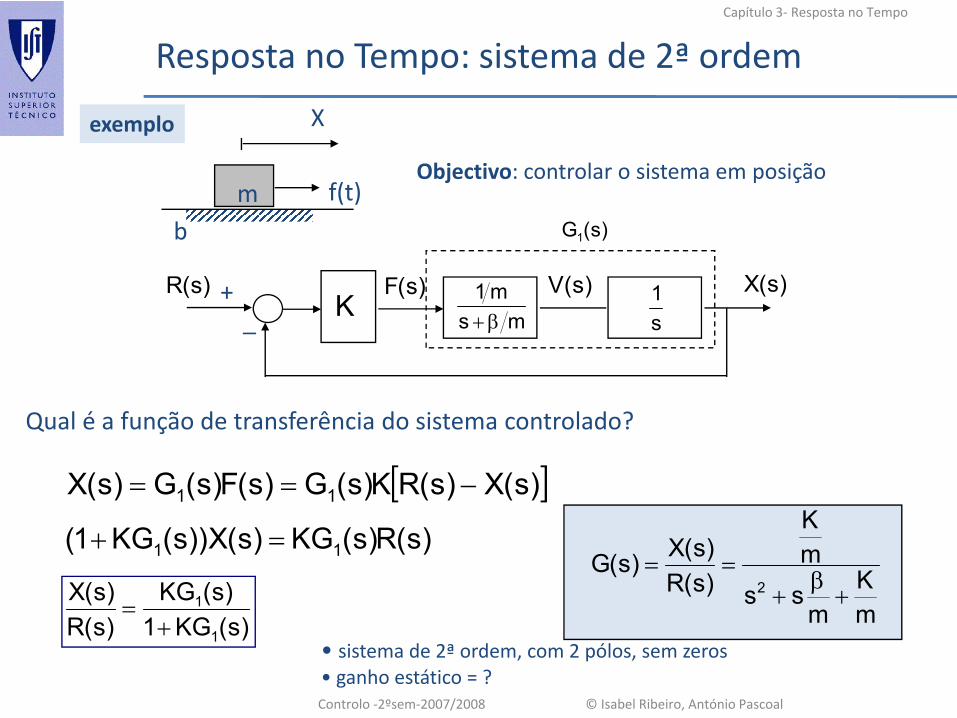
Resposta no Tempo: sistema de 2ª ordem
bm f(t)
X
Objectivo: controlar o sistema em posição
)s(V)s(Fms
m1β+
)s(Xs1K+
_)s(R
Qual é a função de transferência do sistema controlado?
)s(G1
[ ])s(X)s(RK)s(G)s(F)s(G)s(X 11 −==
)s(R)s(KG)s(X))s(KG1( 11 =+
)s(KG1)s(KG
)s(R)s(X
1
1
+= m
Km
ssmK
)s(R)s(X)s(G
2 +β
+==
• sistema de 2ª ordem, com 2 pólos, sem zeros• ganho estático = ?
exemplo
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
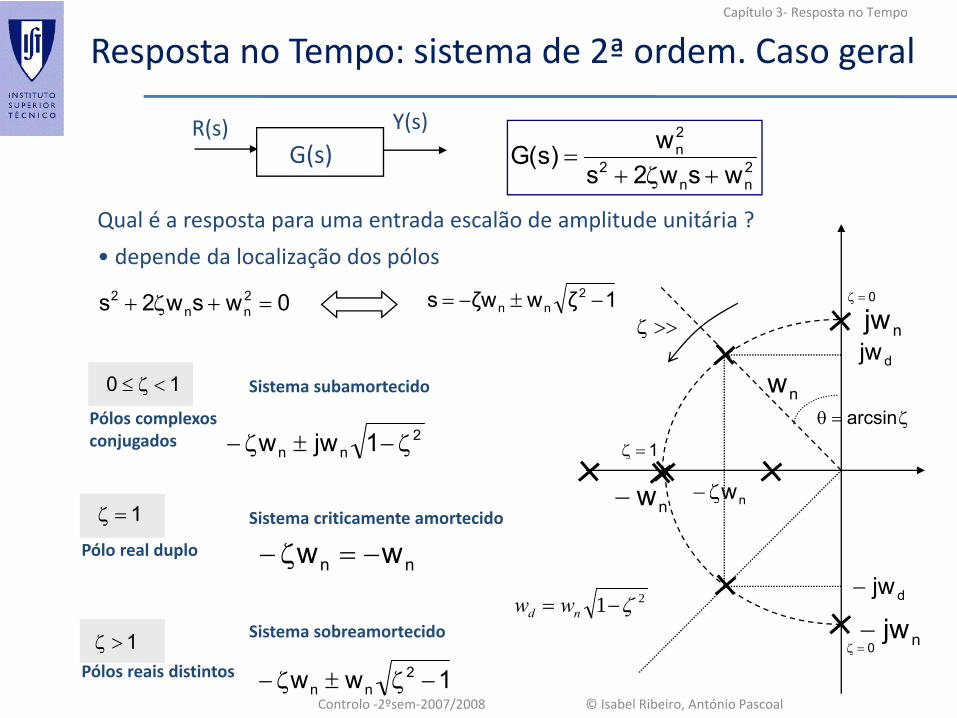
Resposta no Tempo: sistema de 2ª ordem. Caso geral
2nn
2
2n
wsw2sw)s(G
+ζ+=G(s)
R(s) Y(s)
Qual é a resposta para uma entrada escalão de amplitude unitária ?
• depende da localização dos pólos
0wsw2s 2nn
2 =+ζ+
Pólos complexosconjugados
1ζwζws 2nn −±−=
10 <ζ≤
1=ζ
1>ζ
Pólo real duplo
Pólos reais distintos
2nn 1jww ζ−±ζ−
nn ww −=ζ−
1ww 2nn −ζ±ζ−
Sistema subamortecido
Sistema criticamente amortecido
Sistema sobreamortecido
>>ζ
nw
nw−
njw
njw−
djw
djw−
ζ=θ arcsin
0=ζ
0=ζ
1=ζ
nwζ−
21 ζ−= nd ww
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
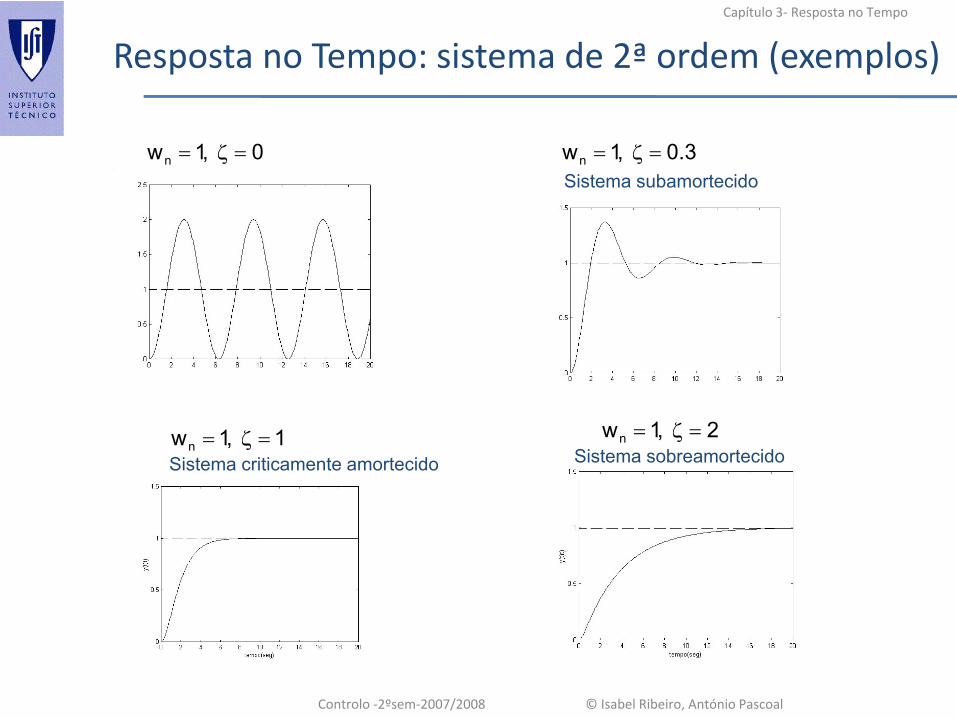
Resposta no Tempo: sistema de 2ª ordem (exemplos)
0 ,1wn =ζ= 0.3 ,1wn =ζ=
1 ,1wn =ζ= 2 ,1wn =ζ=
Sistema subamortecido
Sistema criticamente amortecido Sistema sobreamortecido
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
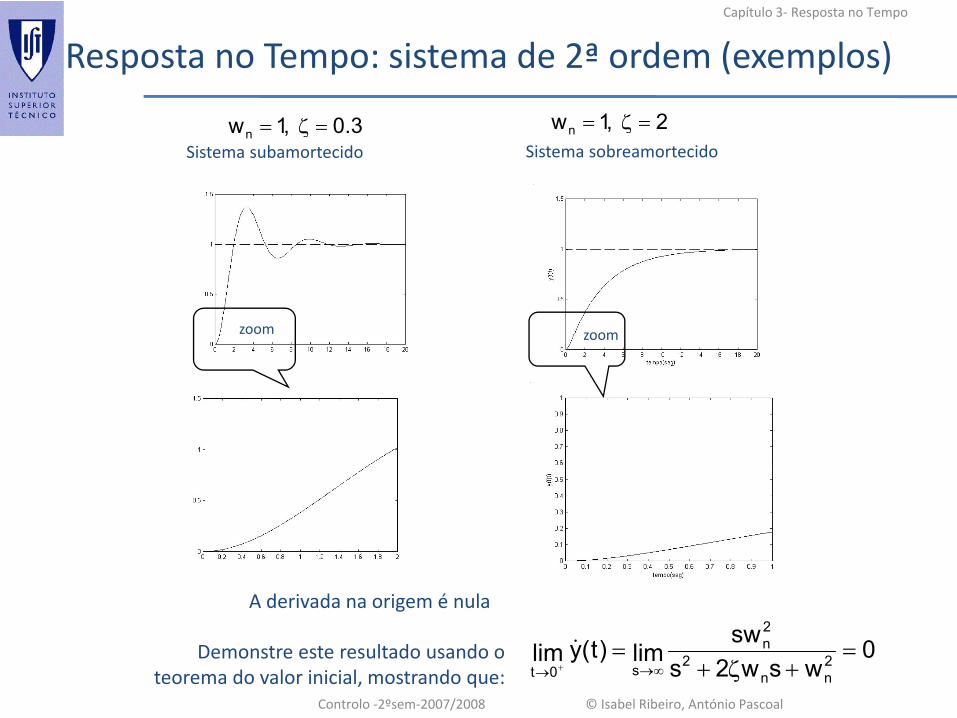
Resposta no Tempo: sistema de 2ª ordem (exemplos)
0.3 ,1wn =ζ= 2 ,1wn =ζ=Sistema subamortecido Sistema sobreamortecido
zoom zoom
A derivada na origem é nula
Demonstre este resultado usando o teorema do valor inicial, mostrando que:
0wsw2s
swlim)t(ylim 2
nn2
2n
s0t=
+ζ+=
∞→→ +
&
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
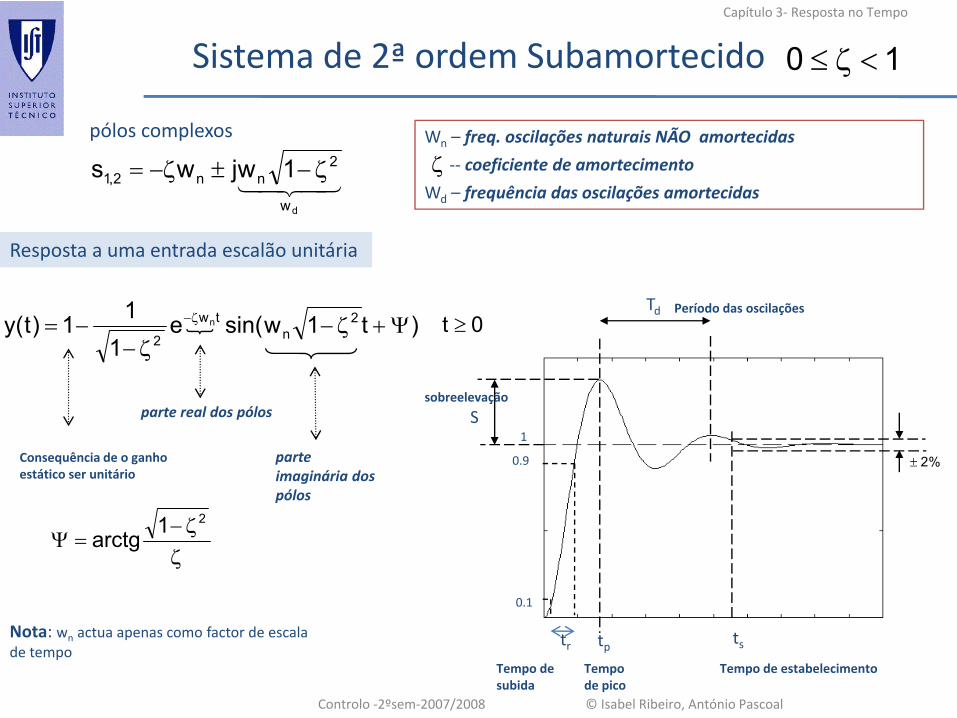
Sistema de 2ª ordem Subamortecido 10 <ζ≤
43421dw
2nn2,1 1wjws ζ−±ζ−=
pólos complexos Wn – freq. oscilações naturais NÃO amortecidas
‐‐ coeficiente de amortecimento
Wd – frequência das oscilações amortecidas
ζ
Resposta a uma entrada escalão unitária
)t1wsin(e1
11)t(y 2n
tw
2n Ψ+ζ−
ζ−−= ζ−
ζζ−
=Ψ21arctg
parte real dos pólos
parte imaginária dos pólos
Consequência de o ganhoestático ser unitário
Nota: wn actua apenas como factor de escalade tempo
S
Td
tp ts
%2±
sobreelevação
Tempo de pico
Tempo de estabelecimento
Período das oscilações0t ≥
trTempo desubida
1
0.9
0.1
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Especificações no domínio do tempo
• As especificações para o desempenho de um sistema controlado são, porvezes, expressas em termos da sua resposta no tempo
• Especificações típicas em termos de:– Tempo de subida (tr) – tempo que o sistema demora a atingir a vizinhança de
um novo set‐point• Vulgarmente o intervalo entre 0.1 e 0.9 do valor final
– Tempo de estabelecimento (ts) – tempo que o regime transitório demora adecair
• Vulgarmente o tempo até a saída se confinar a uma faixa de 5% do valor final
– Sobreelevação ‐ (S%) – valor máximo da saída menos o valor final divido pelo valor final
– Tempo de pico (tp) – é o tempo que o sistema demora a atingir o valor máximo da saída
• Para sistemas de 2ª ordem, sem zeros, subamortecidos, estasespecificações podem expressar‐se como função de ζ e de ωn
±
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Sistema de 2ª ordem SubamortecidoCaracterísticas da resposta
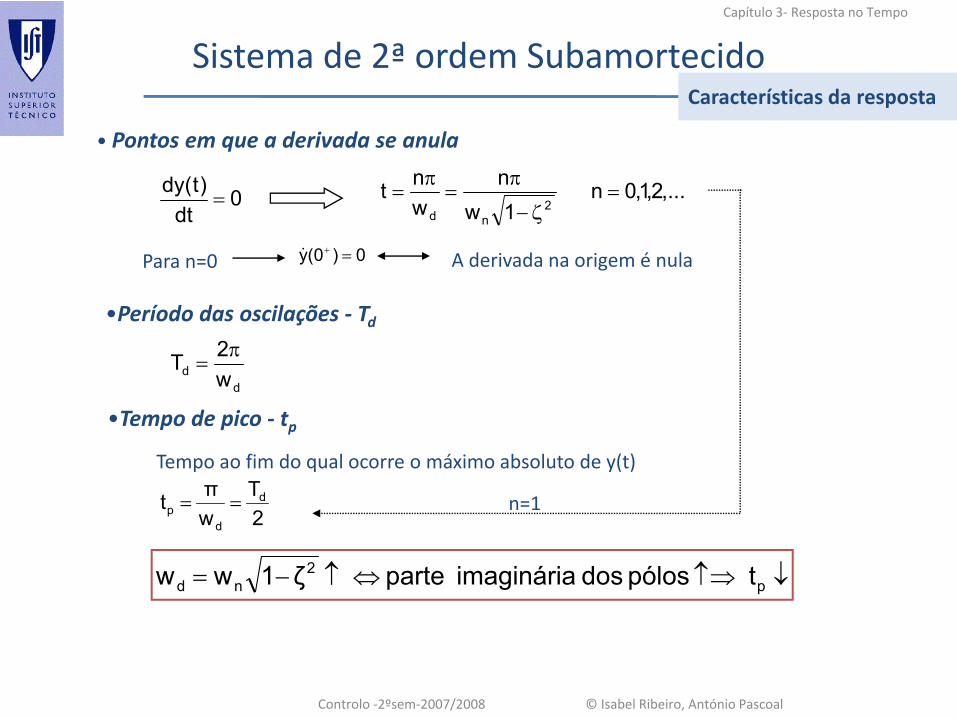
• Pontos em que a derivada se anula
•Período das oscilações ‐ Td
•Tempo de pico ‐ tp
0dt
)t(dy= ,...2,1,0n
1wn
wnt
2nd
=ζ−
π=
π=
dd w
2T π=
Para n=0 0)0(y =+& A derivada na origem é nula
Tempo ao fim do qual ocorre o máximo absoluto de y(t)
2T
wπt d
dp == n=1
↓↑⇒⇔↑−= p2
nd t pólos dos imaginária parte ζ1ww
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Sistema de 2ª ordem SubamortecidoCaracterísticas da resposta
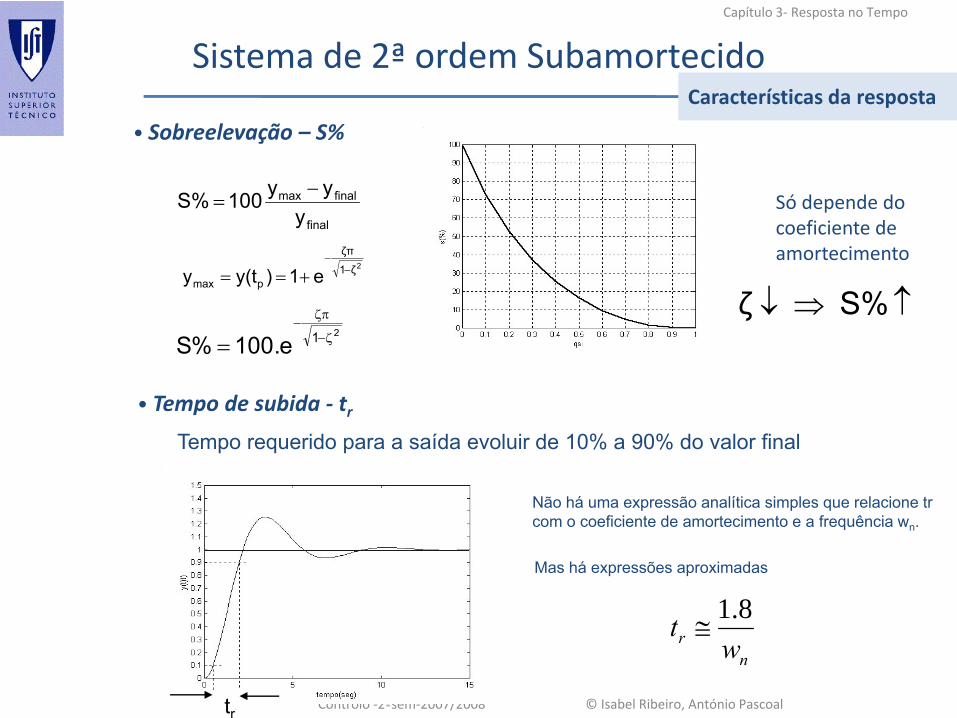
• Sobreelevação – S%
final
finalmax
yyy100S% −
=
2ζ1
ζπ
pmax e1)y(ty −−
+==
21e.100%S ζ−
ζπ−
=
Só depende do coeficiente de amortecimento
↑⇒↓ S% ζ
Tempo requerido para a saída evoluir de 10% a 90% do valor final
tr
Não há uma expressão analítica simples que relacione trcom o coeficiente de amortecimento e a frequência wn.
Mas há expressões aproximadas
nr wt 8.1≅
• Tempo de subida ‐ tr
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Sistema de 2ª ordem SubamortecidoCaracterísticas da resposta
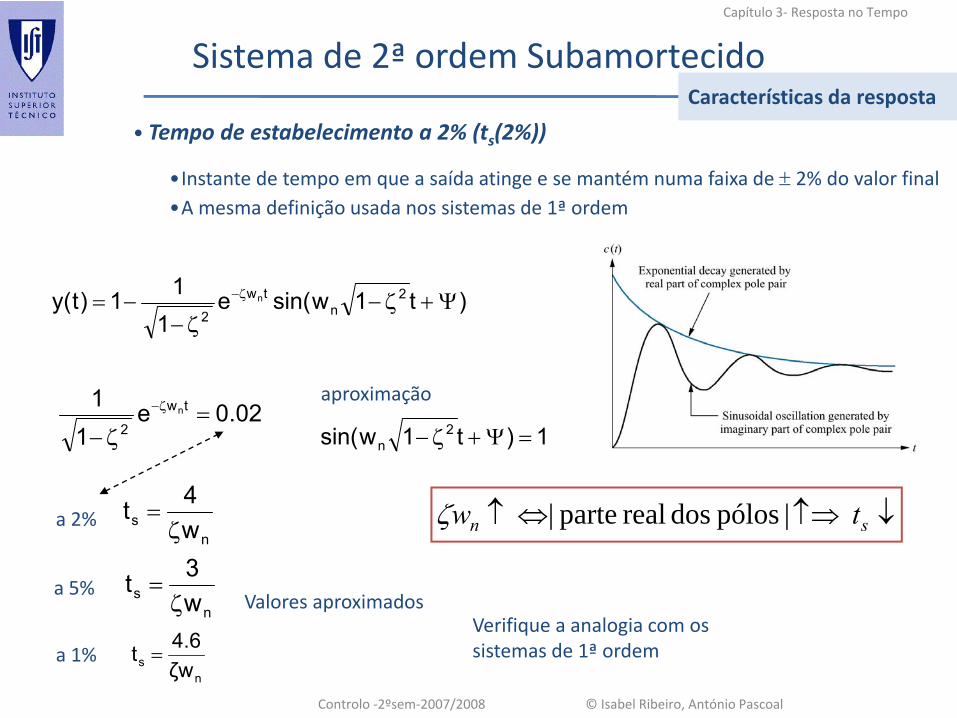
• Tempo de estabelecimento a 2% (ts(2%))
ns w
4tζ
=
Valores aproximadosVerifique a analogia com os sistemas de 1ª ordem
ns w
3tζ
=a 5%
•Instante de tempo em que a saída atinge e se mantém numa faixa de ± 2% do valor final•A mesma definição usada nos sistemas de 1ª ordem
)t1wsin(e1
11)t(y 2n
tw
2n Ψ+ζ−
ζ−−= ζ−
02.0e1
1 tw
2n =
ζ−ζ−
1)t1wsin( 2n =Ψ+ζ−
aproximação
ns ζw
4.6t =a 1%
a 2% ↓↑⇒⇔↑ sn tw |pólos dos real parte| ζ

Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
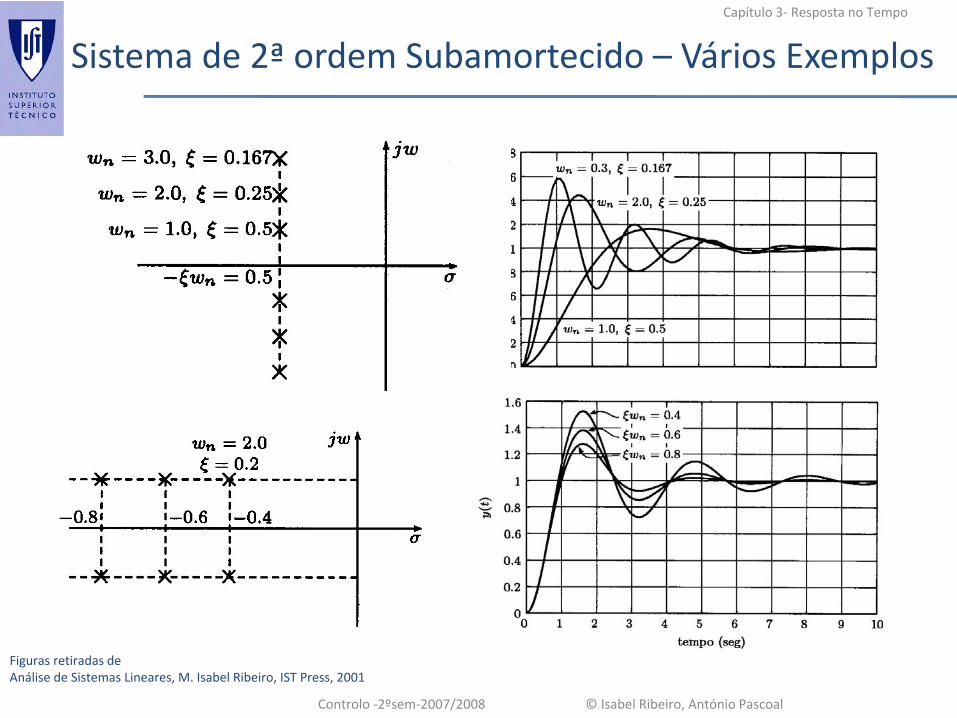
Sistema de 2ª ordem Subamortecido – Vários Exemplos
Figuras retiradas deAnálise de Sistemas Lineares, M. Isabel Ribeiro, IST Press, 2001
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Sistema de 2ª ordem Subamortecido – Vários Exemplos
Figuras retiradas deAnálise de Sistemas Lineares, M. Isabel Ribeiro, IST Press, 2001

Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Sistema de 2ª ordem SubamortecidoLugar geométrico dos pólos que correspondema determinadas especificações
constante ωn
constanteξ
constante ξωn
constante ωd
Tempo de subida constante
Sobreelevação, constante
Tempo de estabelecimento constante
Tempo de pico constante
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
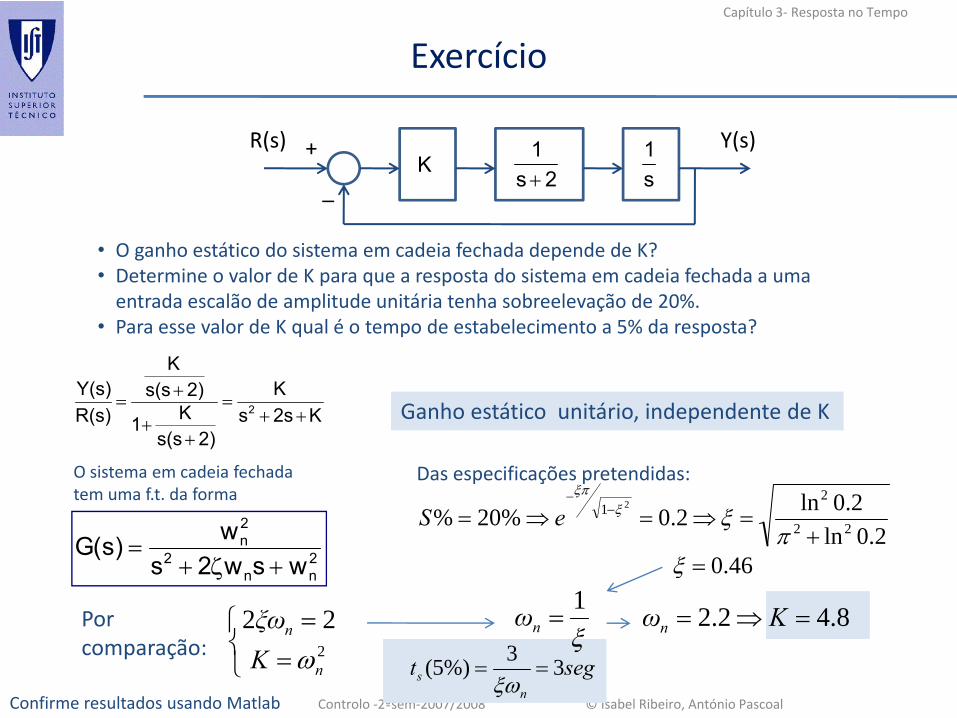
Exercício
2s1+ s
1K
+
_
• O ganho estático do sistema em cadeia fechada depende de K?• Determine o valor de K para que a resposta do sistema em cadeia fechada a umaentrada escalão de amplitude unitária tenha sobreelevação de 20%.
• Para esse valor de K qual é o tempo de estabelecimento a 5% da resposta?
Y(s)R(s)
K2ssK
2)s(sK1
2)s(sK
R(s)Y(s)
2 ++=
++
+= Ganho estático unitário, independente de K
O sistema em cadeia fechada tem uma f.t. da forma
2nn
2
2n
wsw2sw)s(G
+ζ+=
Por comparação:
⎩⎨⎧
==
2
22
n
n
Kξω
ωξ1
=nω
2.0ln2.0ln2.0%20% 22
21 2
+=⇒=⇒= −
−
πξξ
ξπ
eS
46.0=ξ
Das especificações pretendidas:
8.42.2 =⇒= Kωnsegt
ns 33%)5( ==
ξωConfirme resultados usando Matlab
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
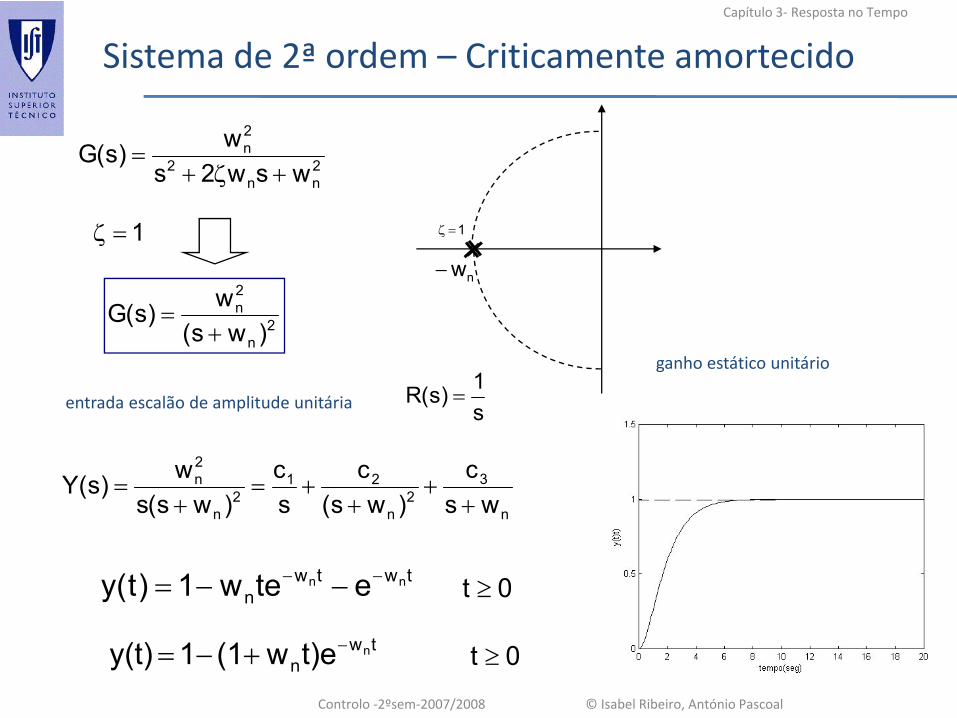
Sistema de 2ª ordem – Criticamente amortecido
nw−
1=ζ
2nn
2
2n
wsw2sw)s(G
+ζ+=
2n
2n
)ws(w)s(G+
=
1=ζ
s1)s(R =entrada escalão de amplitude unitária
n
32
n
212
n
2n
wsc
)ws(c
sc
)ws(sw)s(Y
++
++=
+=
twtwn
nn etew1)t(y −− −−=
twn
nt)ew(11y(t) −+−=
0t ≥
0t ≥
ganho estático unitário
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
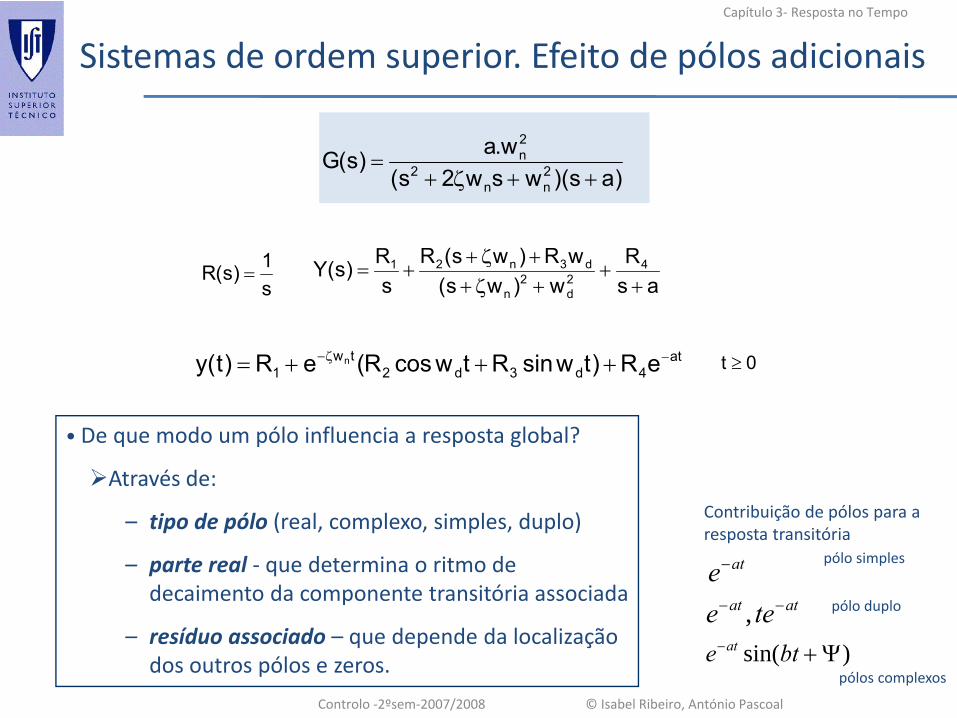
Sistemas de ordem superior. Efeito de pólos adicionais
)as)(wsw2s(w.a)s(G 2
nn2
2n
++ζ+=
s1)s(R = as
Rw)ws(
wR)ws(Rs
R)s(Y 42d
2n
d3n21
++
+ζ++ζ+
+=
at4d3d2
tw1 eR)twsinRtwcosR(eR)t(y n −ζ− +++= 0t ≥
• De que modo um pólo influencia a resposta global?
Através de:
– tipo de pólo (real, complexo, simples, duplo)
– parte real ‐ que determina o ritmo dedecaimento da componente transitória associada
– resíduo associado – que depende da localização dos outros pólos e zeros.
ate−atat tee −− ,
)sin( Ψ+− bte at
Contribuição de pólos para a resposta transitória
pólo simples
pólo duplo
pólos complexos
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
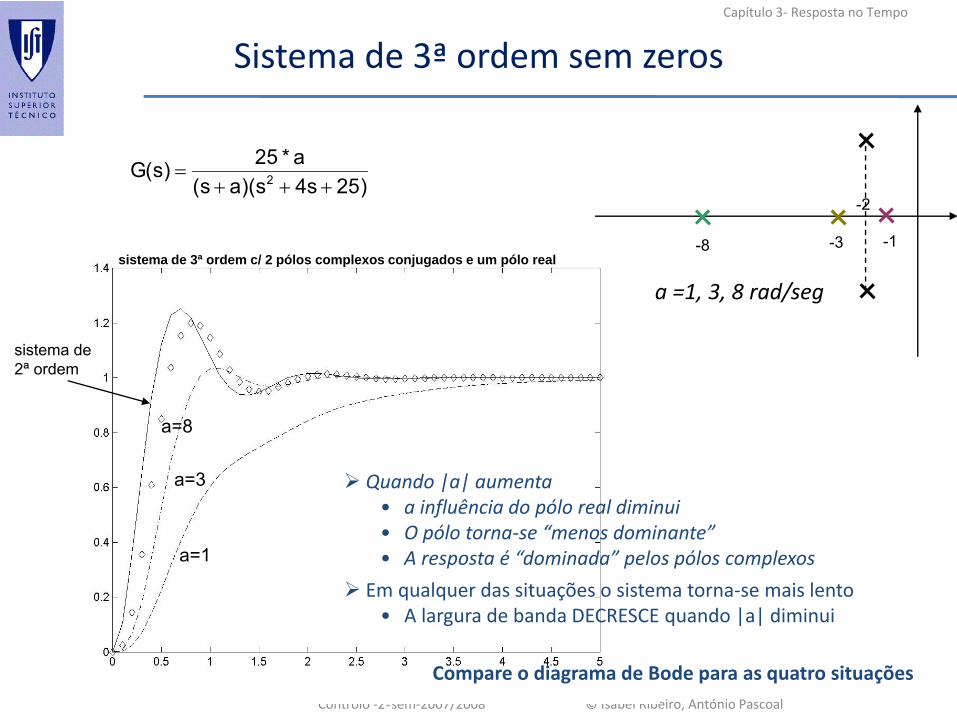
Sistema de 3ª ordem sem zeros
)25s4s)(as(a*25)s(G 2 +++
=
-1-3-8
-2
Quando |a| aumenta• a influência do pólo real diminui• O pólo torna‐se “menos dominante”• A resposta é “dominada” pelos pólos complexos
Em qualquer das situações o sistema torna‐se mais lento• A largura de banda DECRESCE quando |a| diminui
a =1, 3, 8 rad/seg
a=1
a=3
a=8
sistema de 2ª ordem
sistema de 3ª ordem c/ 2 pólos complexos conjugados e um pólo real
Compare o diagrama de Bode para as quatro situações
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Sistemas de ordem superior: Pólos não dominantes
)25s4s)(as(a*25)s(G 2 +++
=
Quando |a| aumenta• a influência do pólo diminui• O pólo torna‐se “menos dominante”• Os pólos complexos são pólos dominantes
Em que condições é possível desprezar o pólo (real) não dominante ?
Quando o regime transitório associado é desprezável, no conjunto de todas ascontribuições transitórias, ao fim de aproximadamente 5 constantes de tempo.
Quando o módulo do pólo real é pelo menos cinco vezesmaior que o módulo da parte real dos pólos dominantes.

Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Sistemas de ordem superior: Pólos não dominantes
)25s4s)(as(a*25)s(G 2 +++
=
)25s4s)(10s(250)s(G 2 +++
=
)25s4s)(1s101(
25)s(G2 +++
=
)25s4s(25)s(G 2 ++
≅
O desprezo de pólos não dominantes tem que preservar o
ganho estático
3ªordem
2ªordem
Aproxima o sistema de 2ªordem, no que respeita à resposta no
tempoQue acontece no domínio da frequência?
Qual é o conceito de pólo não dominante no domínio da frequência?
10=a
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
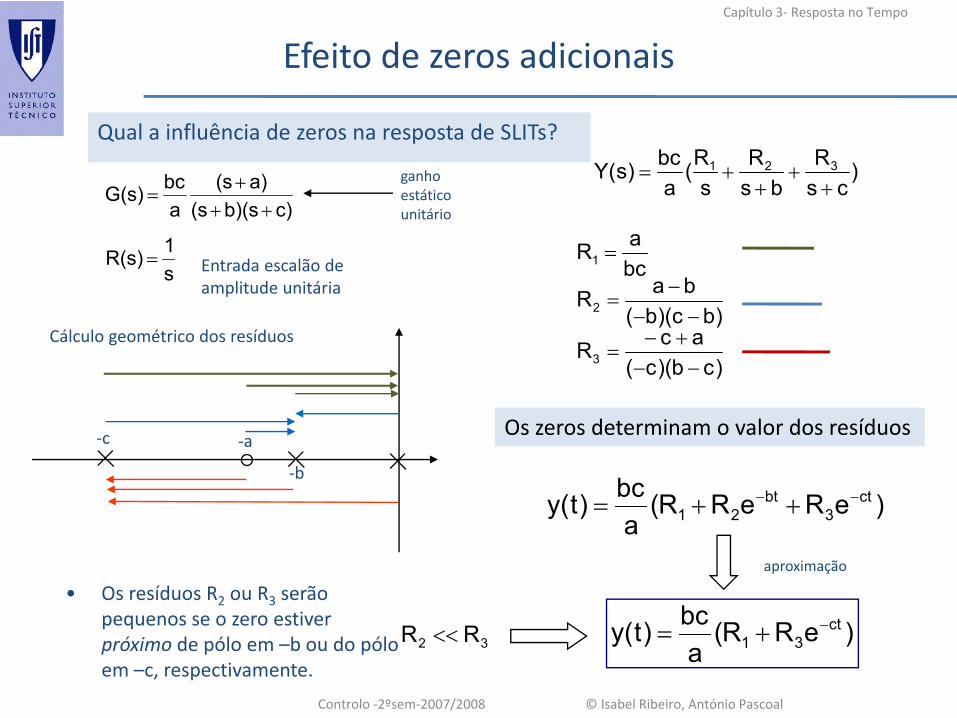
Efeito de zeros adicionais
Qual a influência de zeros na resposta de SLITs?
c)b)(s(sa)(s
abcG(s)
+++
=ganho estáticounitário
Entrada escalão de amplitude unitária
)cs
Rbs
Rs
R(a
bc)s(Y 321
++
++=
‐b
‐c ‐a
Cálculo geométrico dos resíduos
)cb)(c(acR
)bc)(b(baR
bcaR
3
2
1
−−+−
=
−−−
=
=
• Os resíduos R2 ou R3 serãopequenos se o zero estiverpróximo de pólo em –b ou do pólo em –c, respectivamente.
)eReRR(a
bc)t(y ct3
bt21
−− ++=
32 RR << )eRR(a
bc)t(y ct31
−+=
aproximação
s1R(s) =
Os zeros determinam o valor dos resíduos
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
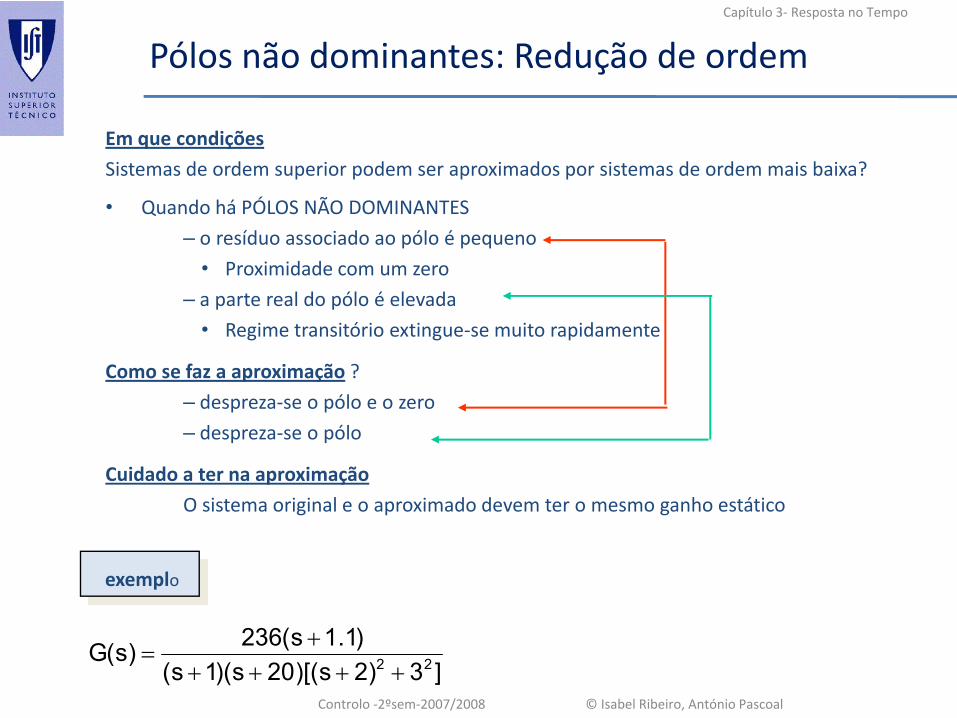
Pólos não dominantes: Redução de ordem
Em que condições
Sistemas de ordem superior podem ser aproximados por sistemas de ordem mais baixa?
• Quando há PÓLOS NÃO DOMINANTES
– o resíduo associado ao pólo é pequeno
• Proximidade com um zero
– a parte real do pólo é elevada
• Regime transitório extingue‐se muito rapidamente
Como se faz a aproximação ?
– despreza‐se o pólo e o zero
– despreza‐se o pólo
Cuidado a ter na aproximação
O sistema original e o aproximado devem ter o mesmo ganho estático
]3)2s)[(20s)(1s()1.1s(236)s(G 22 ++++
+=
exemplo
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
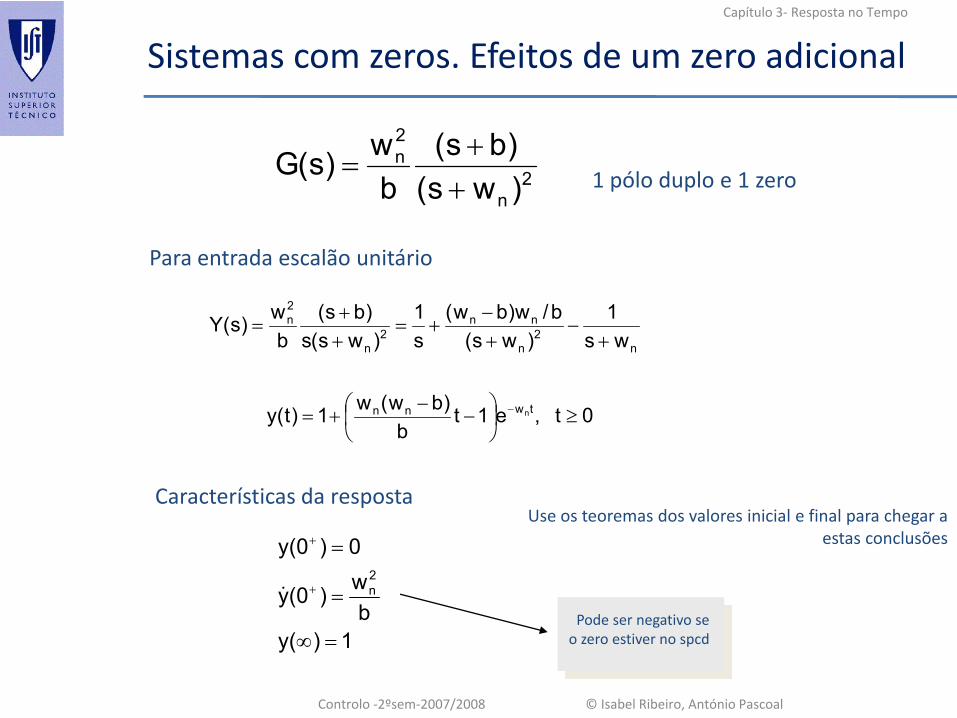
Sistemas com zeros. Efeitos de um zero adicional
2n
2n
)ws()bs(
bw)s(G
++
=
Para entrada escalão unitário
n2
n
nn2
n
2n
ws1
)ws(b/w)bw(
s1
)ws(s)bs(
bw)s(Y
+−
+−
+=++
=
0t ,e1tb
)bw(w1)t(y twnn n ≥⎟⎠⎞
⎜⎝⎛ −
−+= −
1 pólo duplo e 1 zero
1)(yb
w)0(y
0)0(y2n
=∞
=
=
+
+
&
Características da respostaUse os teoremas dos valores inicial e final para chegar a
estas conclusões
Pode ser negativo se o zero estiver no spcd
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
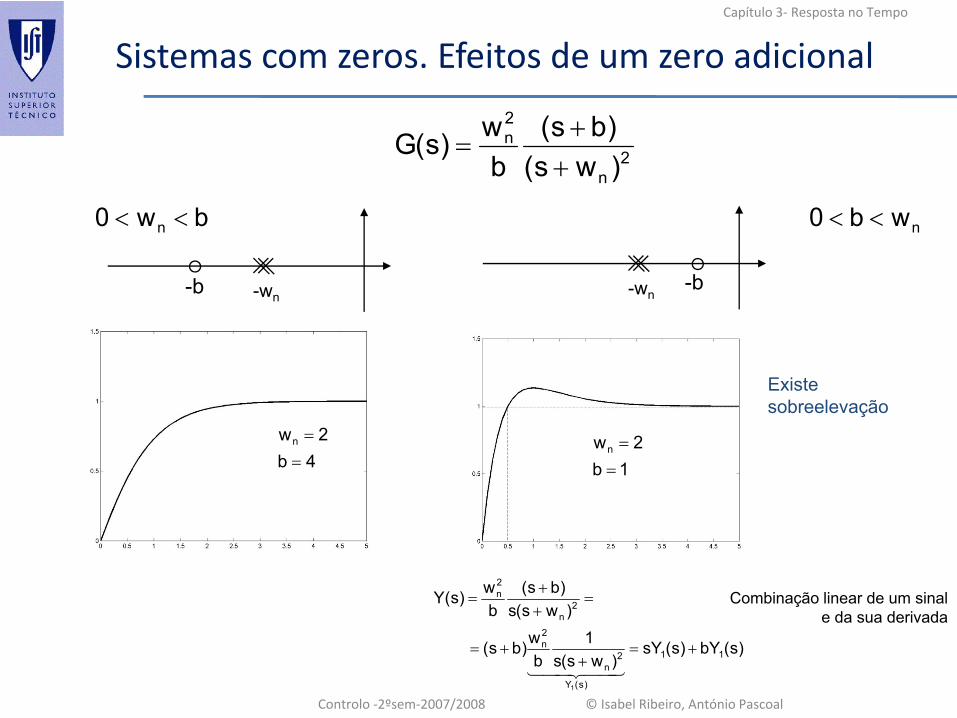
Sistemas com zeros. Efeitos de um zero adicional
2n
2n
)ws()bs(
bw)s(G
++
=
-wn-b
bw0 n << nwb0 <<
-wn-b
4b2wn
==
Existe sobreelevação
)s(bY)s(sY)ws(s
1b
w)bs(
)ws(s)bs(
bw)s(Y
11
)s(Y
2n
2n
2n
2n
1
+=+
+=
=++
=
44 344 21
Combinação linear de um sinal e da sua derivada
1b2wn
==
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
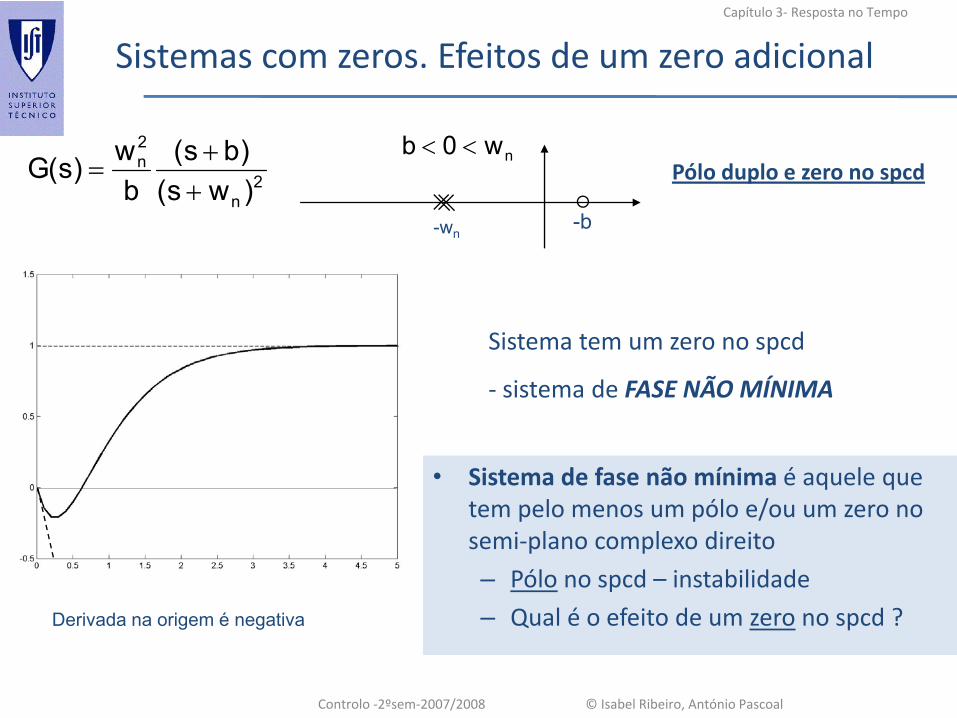
Sistemas com zeros. Efeitos de um zero adicional
2n
2n
)ws()bs(
bw)s(G
++
=
-wn-b
nw0b <<
Derivada na origem é negativa
Sistema tem um zero no spcd
‐ sistema de FASE NÃO MÍNIMA
Pólo duplo e zero no spcd
• Sistema de fase não mínima é aquele quetem pelo menos um pólo e/ou um zero nosemi‐plano complexo direito
– Pólo no spcd – instabilidade
– Qual é o efeito de um zero no spcd ?

Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Sistema de Fase não mínima: Exemplo. Barrilete
Exemplo – Barrilete– Centrais termoeléctricas
– Produção de vapor
r(t) h(t)
Caudal de água fria à entrada
Altura da água no barrilete
• Relação entre a abertura da válvula da água fria e a altura da água no barrilete depende de:
• Efeito rápido de contracção da águadevido à injecção de água fria
• Efeito de integração devido à adição de massa
barrilete
Lento
Rápido
Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
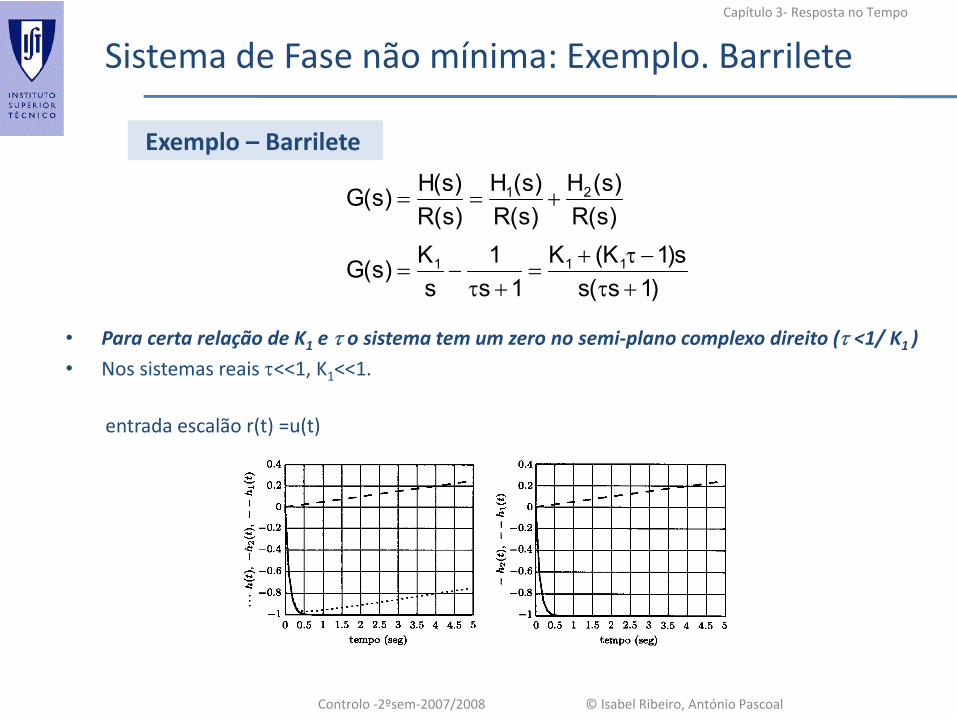
Sistema de Fase não mínima: Exemplo. Barrilete
• Para certa relação de K1 e τ o sistema tem um zero no semi‐plano complexo direito (τ <1/ K1 )• Nos sistemas reais τ<<1, K1<<1.
)s(R)s(H
)s(R)s(H
)s(R)s(H)s(G 21 +==
)1s(ss)1K(K
1s1
sK)s(G 111
+τ−τ+
=+τ
−=
entrada escalão r(t) =u(t)
Exemplo – Barrilete

Controlo ‐2ºsem‐2007/2008 © Isabel Ribeiro, António Pascoal
Capítulo 3‐ Resposta no Tempo
Sistema de fase não mínima: Manipulador Flexível
Manipulador Rígido
θΤ
T‐binário motor
t0
T(t)
t0
θ(t)entrada
saída
t0
T(t)
t
θ(t)entrada
saída
θΤ
T‐binário motorEfeito de “chicote” (FASE NÃO MÍNIMA)
Manipulador Flexível
Related Documents