GRAMEYER GRAMEYER Equipamentos Eletrônicos Ltda / Equipamentos Eletrônicos Ltda / GRAMEYER GRAMEYER Indústria Eletroeletrônica Ltda. Indústria Eletroeletrônica Ltda. R. Mal. Castelo Branco, 2477 – Schroeder – SC – Brasil 89275-000 e-mail: [email protected] - www.grameyer.com.br Fones: 55 (047) 3374-6300 – Fax: 3374-6363 MXXXxxxxxx Regulador de Tensão Digital Regulador de Tensão Digital GRTD2000 GRTD2000 Manual de instalação e operação Manual de instalação e operação Revisão Revisão 01 01 de de 09/05/2012 09/05/2012 Versão de firmware 1.00.0 Versão de firmware 1.00.0

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

GRAMEYERGRAMEYER Equipamentos Eletrônicos Ltda /Equipamentos Eletrônicos Ltda /GRAMEYERGRAMEYER Indústria Eletroeletrônica Ltda.Indústria Eletroeletrônica Ltda.R. Mal. Castelo Branco, 2477 – Schroeder – SC – Brasil 89275-000e-mail: [email protected] - www.grameyer.com.brFones: 55 (047) 3374-6300 – Fax: 3374-6363
MXXXxxxxxx
Regulador de Tensão DigitalRegulador de Tensão Digital
GRTD2000GRTD2000Manual de instalação e operaçãoManual de instalação e operação
Revisão Revisão 0101 de de 09/05/201209/05/2012Versão de firmware 1.00.0Versão de firmware 1.00.0

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
© 1996, GRAMEYER Equipamentos Eletrônicos / GRAMEYER Indústria Eletroeletrônica. Todos os direitos reservados.
Esta publicação não poderá em hipótese alguma ser reproduzida, armazenada ou transmitida através de nenhum tipo de mídia, seja eletrônica, impressa, fonográfica ou qualquer outro meio audiovisual, sem a prévia autorização da GRAMEYER Equipamentos Eletrônicos Ltda. Os infratores estarão sujeitos às penalidades previstas em lei.
Esta publicação está sujeita a alterações e/ou atualizações que poderão resultar em novas revisões dos manuais de instalação e operação, tendo em vista o contínuo aperfeiçoamento dos produtos GRAMEYER. A GRAMEYER se reserva o direito da não obrigatoriedade de atualização automática das informações contidas nestas novas revisões. Contudo, em qualquer tempo o cliente poderá solicitar material atualizado que lhe será fornecido sem encargos decorrentes.
* Em caso de perda do manual de instruções, a GRAMEYER poderá fornecer exemplar avulso, e se necessário, informações adicionais sobre o produto. As solicitações poderão ser atendidas, desde que informado o número de série e modelo do equipamento.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 2 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Informações sobre segurança
Para garantir a segurança dos operadores, a correta instalação do equipamento e sua preservação, as seguintes precauções deverão ser tomadas:
● Os serviços de instalação e manutenção deverão ser executados somente por pessoas qualificadas e com a utilização dos equipamentos apropriados;
● Deverão sempre ser observados os manuais de instrução e a documentação específica do produto antes de proceder a sua instalação, manuseio e parametrização;
● Deverão ser tomadas as devidas precauções contra quedas, choques físicos e/ou riscos à segurança dos operadores e do equipamento;
Não toque nos conectores de entradas e saídas. E mantenha-os sempre isolados do restantedo circuito de comando do painel, salvo orientações em contrário.
Sempre desconecte a alimentação geral antes de tocar em qualquer componenteelétrico associado ao equipamento, isto inclui também os conectores de comandos. Não abra a tampa do equipamento sem as devidas precauções, pois altas tensões podem estar presentes mesmo após a desconexão da alimentação.
Os cartões eletrônicos do equipamento podem possuir componentes sensíveis a descargas eletrostáticas. Não toque diretamente sobre componentes ou conectores. Caso necessário, toque antes na carcaça metálica aterrada ou utilize pulseira de aterramento adequada.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 3 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Informações sobre armazenamento
Em caso de necessidade de armazenagem do equipamento bem como de suas partes constituintes, sejam eles, cartões eletrônicos, painéis, componentes eletrônicos, peças sobressalentes, etc..., por um breve período de tempo que anteceda a sua instalação e/ou colocação em funcionamento, deverão ser tomadas as seguintes precauções:
● Os equipamentos e suas partes constituintes deverão ser mantidos nas suas embalagens originais ou embalagens que satisfaçam as mesmas condições de segurança contra danos mecânicos, temperatura e umidade excessivas, para prevenir a ocorrência de oxidação de contatos e partes metálicas, danos a circuitos integrados ou outros danos provenientes da má conservação;
● O equipamento devidamente acondicionado deverá ser abrigado em local seco, ventilado em que não ocorra a incidência direta dos raios solares, bem como a chuva, vento e outras intempéries, para garantir a manutenção de suas características funcionais;
A não observância das recomendações acima, poderá eximir a empresa fornecedora do equipamento de quaisquer responsabilidades pelos danos decorrentes, bem como a perda da garantia sobre o equipamento ou parte danificada.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 4 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Convenções Utilizadas no Manual
Algumas convenções quanto aos tipos de fonte ou formatação foram utilizadas neste manual com o intuito de possibilitar uma leitura clara e descomplicada. Abaixo estão especificadas as principais convenções utilizadas:
Variável – Todas as variáveis ou designação de parâmetros de leitura ou de programação estão em tipo negrito e itálico com fonte courier new.
Valor – Os valores das variáveis ou valor dos parâmetros de leitura ou programação estão em tipo itálico e fonte courier new.
NOTA (maiúsculo): Texto digitado.(maiúsculo/minúsculo) – As notas e alertas representam informações importantes que deverão ser observadas pelo operador ou supervisor da operação.
ASSUNTO DA PÁGINAASSUNTO DA PÁGINA – Nas bordas de cada página o leitor poderá ter uma referência rápida do principal assunto que está sendo nela tratado, sem que seja necessário recorrer aos índices para localizar a informação desejada, bastando para isso folhear o manual.
Referência a títulos e subtítulos – As referências feitas a títulos e subtítulos, usadas no decorrer do texto para remeter o leitor a um outro tópico mais detalhado sobre o assunto ou onde o leitor possa obter a informação desejada, contidos no manual, estão escritos em tipo itálico. Palavras ou expressões em idioma diferente do corrente também será escrito em tipo itálico.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 5 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 6 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Histórico de Revisões
Abaixo são apresentados os históricos sobre as modificações efetuadas no hardware, firmware, software e manual de instruções do equipamento GRTD2000. Revisões estão listadas em ordem cronológica inversa.
Manual:Rev. 01
– Adicionado descritivo das funções do regulador de velocidade;– Modificado endereço de algumas variáveis no mapa de memória;– Incluídas variáveis do regulador de velocidade no mapa de memória;
Firmware:Rev. 1.00.0
– Adicionado bloco lógico do regulador de velocidade;– Modificado endereço de algumas variáveis no mapa de memória;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 7 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Índice Analítico1 - Descrição do Equipamento..................................................................15
1.1 - Introdução............................................................................................151.2 - Características Elétricas.........................................................................15
1.2.1 - Entradas Analógicas..................................................................................171.2.2 - Saídas Analógicas.....................................................................................181.2.3 - Entradas Digitais......................................................................................181.2.4 - Saídas Digitais..........................................................................................181.2.5 - Portas de comunicação.............................................................................18
1.3 - Características Mecânicas.......................................................................181.3.1 - Dimensões...............................................................................................18
1.4 - Interface com o Usuário........................................................................191.5 - Funções................................................................................................191.6 - Limitadores...........................................................................................201.7 - Proteções / Alarmes..............................................................................201.8 - Características Climáticas.......................................................................201.9 - Normas aplicáveis.................................................................................211.10 - Topologias de Montagem.....................................................................22
1.10.1 - Canal Simples com modulo de potencia incorporado.................................221.10.2 - Canal Simples com Modulo de Potência Separado.....................................231.10.3 - Canal Duplo com Modulo de Potência Incorporado....................................241.10.4 - Canal Duplo com Modulo de Potencia Separado........................................251.10.5 - Canal Duplo com Modulo de Potência Separado e Disparo Cruzado............26
1.11 - Diagrama de ligação Típico..................................................................271.12 - Conexões Elétricas...............................................................................27
1.12.1 - Alimentação...........................................................................................271.12.2 - Saída Isolada Auxiliar p/ Alimentação Módulo de Potência GPRI2000.........281.12.3 - Saídas Digitais........................................................................................281.12.4 - Realimentação Tensão de Armadura........................................................291.12.5 - Realimentação Tensão de Barramento.....................................................301.12.6 - Realimentação Tensão de Campo............................................................311.12.7 - Realimentação Tensão transformador de Campo....................................321.12.8 - Realimentação Corrente de Armadura.....................................................331.12.9 - Realimentação Corrente de Campo.........................................................341.12.10 - Entradas Analógicas..............................................................................351.12.11 - Saídas Analógicas ................................................................................361.12.12 - Entradas Digitais..................................................................................371.12.13 - Disparo Módulo de Potência Externo......................................................381.12.14 - Porta de Comunicação COM1 RS-232....................................................401.12.15 - Porta de Comunicação COM1 RS-485....................................................411.12.16 - Porta de Comunicação COM2 RS-485....................................................421.12.17 - Porta de Comunicação CAN..................................................................43
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 8 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.18 - Porta de Comunicação Ethernet............................................................441.12.19 - Porta de Comunicação Duplo Canal.......................................................45
2 - Instalação..........................................................................................462.1 - Fixação e posição..................................................................................462.2 - Aterramento..........................................................................................47
3 - Interface Homem Máquina - IHM.........................................................483.1 - Leds.....................................................................................................483.2 - Chaves de Configuração........................................................................493.3 - Teclado................................................................................................503.4 - Display.................................................................................................50
3.4.1 - Tela inicial................................................................................................513.5 - Senha...................................................................................................51
3.5.1 - Ativando a senha......................................................................................513.5.2 - Desativando a senha.................................................................................51
3.6 - Mapa de Telas/Parâmetros....................................................................514 - Descrição funcional.............................................................................65
4.1 - Regulador de Tensão.............................................................................654.1.1 - Modos de Controle....................................................................................65
4.1.1.1 - Malha Primária.............................................................................................654.1.1.1.1 - Modo Manual......................................................................................................654.1.1.1.2 - Modo Automático................................................................................................67
4.1.1.2 - Malha Secundária........................................................................................684.1.2 - Comutação Suave Entre Modos de Operação..............................................694.1.3 - Rampa de Referência................................................................................694.1.4 - Referência Por Entrada Analógica..............................................................704.1.5 - Limitadores..............................................................................................70
4.1.5.1 - Limitador Referências....................................................................................714.1.5.2 - Limitador Saída Controle...............................................................................714.1.5.3 - Limitador Sobrecorrente de Campo................................................................724.1.5.4 - Limitador Subcorrente de Campo...................................................................734.1.5.5 - Limitador de Subexcitação (PxQ)...................................................................744.1.5.6 - Limitador de Sobrecorrente de Armadura.......................................................744.1.5.7 - Limitador Tensão-Frequência (V/Hz)..............................................................75
4.1.6 - Escorvamento Automático.........................................................................764.2 - Sincronoscópio......................................................................................77
4.2.1 - Modos de Operação..................................................................................774.2.1.1 - Barra Morta..................................................................................................774.2.1.2 - Checagem das Condições de Sincronismo.......................................................784.2.1.3 - Sincronizador ...............................................................................................78
4.2.1.3.1 - Largura Variável.................................................................................................784.2.1.3.2 - Frequência Variável.............................................................................................78
4.2.1.4 - Sincronismo Automático................................................................................794.3 - Duplo Canal..........................................................................................79
4.3.1 - Logica de transferência de canais..............................................................804.3.1.1 - Ao energizar:................................................................................................804.3.1.2 - Durante operação:........................................................................................80
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 9 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.3.1.2.1 - Comutação por falha:..........................................................................................804.3.1.2.2 - Comutação Por Comando....................................................................................80
4.3.2 - Seguimento de Referência........................................................................804.3.3 - Sincronização de Variáveis........................................................................81
4.3.3.1 - Ao energizar.................................................................................................814.3.3.2 - Durante operação.........................................................................................81
4.4 - Código de Desbloqueio de Funções........................................................814.5 - Entradas analógicas...............................................................................81
4.5.1 - Exemplo de ajuste....................................................................................824.6 - Saídas analógicas..................................................................................82
4.6.1 - Exemplo de ajuste....................................................................................834.7 - Sincronismo Temporal...........................................................................84
4.7.1 - IRIG-B000................................................................................................844.8 - Oscilografias.........................................................................................87
4.8.1 - Estrutura dos Arquivos de Oscilografia.......................................................884.8.2 - Acesso aos registros de oscilografia...........................................................894.8.3 - Parâmetros de Configuração......................................................................894.8.4 - Características técnicas:............................................................................90
4.9 - Registro de Eventos...............................................................................914.9.1 - Acesso aos Registros................................................................................924.9.2 - Lista de Eventos.......................................................................................92
5 - Comunicação serial...........................................................................1075.1 - Representação em ponto fixo...............................................................1075.2 - Valores de Base...................................................................................107
5.2.1 - Tensão de Armadura - Varm....................................................................1075.2.2 - Corrente de Armadura - Iarm..................................................................1075.2.3 - Potência de Armadura - Pot.....................................................................1085.2.4 - Tensão de Campo - Vfld..........................................................................1085.2.5 - Corrente de Campo - Ifld.........................................................................1095.2.6 - Rotações por Minuto - RPM.....................................................................1095.2.7 - Q0.........................................................................................................1105.2.8 - Q10.......................................................................................................1105.2.9 - Q13_P....................................................................................................1115.2.10 - Q0_MS.................................................................................................1115.2.11 - Frequência - Freq..................................................................................1125.2.12 - Angulo - Ang........................................................................................1125.2.13 - Fator de Potência - FP...........................................................................112
5.3 - Portas de Comunicação........................................................................1135.3.1 - COM 1 – Comunicação Modbus Slave.......................................................1135.3.2 - COM 2 – Comunicação Modbus Master.....................................................1135.3.3 - RJ-45-Ethernet – Comunicação Geral.......................................................114
5.4 - Configuração das Portas de Comunicação COM1 e COM2.......................1145.4.1 - RS232/RS485.........................................................................................1145.4.2 - Velocidade de Comunicação....................................................................1145.4.3 - Endereço do Equipamento na Rede Modbus.............................................114
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 10 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
5.5 - Configuração da Porta Ethernet............................................................1155.6 - Endereçamento dos Bits.......................................................................115
6 - Mapa de memória.............................................................................1166.1 - Variáveis Somente Leitura....................................................................116
6.1.1 - Variáveis Campos de Bits Somente Leitura...............................................1216.2 - Variáveis Leitura / Escrita.....................................................................130
6.2.1 - Variáveis Campos de Bits Leitura / Escrita...............................................1326.3 - Variáveis Parâmetros...........................................................................136
6.3.1 - Variáveis Campos de Bits do tipo Parâmetro.............................................1506.4 - Variáveis Lógica...................................................................................152
7 - Procedimento de comissionamento....................................................1578 - Manutenção preventiva.....................................................................1589 - Problemas, causas e soluções............................................................159
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 11 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Índice de FigurasFigura 1.3.1.1: Dimensões de altura da GRTD 2000 Com Potência (esquerda) e Sem Potência (direita).........................................................................................................19e abaixo as dimensões de largura e comprimento, sendo iguais em ambas.....................19Figura 1.10.1.1: Topologia Canal Simples com Modulo de Potência Incorporado..............22Figura 1.10.2.1: Topologia Canal Simples com Modulo de Potência Separado..................23Figura 1.10.3.1: Topologia Canal Duplo com Modulo de Potência Incorporado................24Figura 1.10.4.1: Topologia Canal Duplo com Modulo de Potência Simples.......................25Figura 1.10.5.1: Topologia Canal Duplo com Disparo Cruzado........................................26Figura 1.12.1.1: Topologia de alimentação do circuito eletrônico do regulador................28Figura 1.12.2.1: Topologia saída auxiliar isolada p/ alimentação módulo de potência GPRI2000...................................................................................................................28Figura 1.12.3.1: Topologia saídas digitais.....................................................................29Figura 1.12.4.1: Topologia realimentação tensão de armadura.......................................30Figura 1.12.5.1: Topologia realimentação tensão de barramento....................................31Figura 1.12.6.1: Topologia realimentação tensão de campo...........................................32Figura 1.12.7.1: Topologia realimentação tensão transformador de campo.....................33Figura 1.12.8.1: Topologia realimentação corrente de armadura....................................34Figura 1.12.9.1: Topologia realimentação corrente de campo.........................................35Figura 1.12.10.1: Topologia entrada analógica..............................................................36Figura 1.12.11.1: Topologia saídas analógicas...............................................................37Figura 1.12.12.1: Topologia entradas digitais................................................................38Figura 1.12.13.1: Topologia conexão de modulo de potência externo.............................39Figura 1.12.13.2: Pinagem cabo de conexão com o modulo de potência externo.............40Figura 1.12.14.1: Topologia conexão COM1 - RS232.....................................................41Figura 1.12.14.2: Pinagem cabo conexão COM1 - RS232...............................................41Figura 1.12.15.1: Topologia conexão COM1 - RS485.....................................................42Figura 1.12.16.1: Topologia conexão COM2 - RS485.....................................................43Figura 1.12.17.1: Topologia conexão CAN.....................................................................44Figura 1.12.18.1: Topologia conexão Ethernet..............................................................44Figura 1.12.19.1: Topologia conexão COM-DC..............................................................45Figura 2.1.1: Medidas entre furos de fixação da GRTD 2000..........................................46Figura 4.1.1.1.1.1: Malha controle corrente de campo...................................................66Figura 4.1.1.1.1.2: Malha controle tensão de campo......................................................66Figura 4.1.1.1.1.3: Malha controle ângulo de disparo.....................................................66Figura 4.1.1.1.2.1: Malha controle tensão de armadura.................................................67Figura 4.1.1.1.2.2: Malha controle tensão de armadura com compensação de reativos....68Figura 4.1.1.2.1: Malha controle potência reativa..........................................................68Figura 4.1.1.2.2: Malha controle fator de potência.........................................................69Figura 4.1.3.1: Rampa de referência.............................................................................70Figura 4.1.4.1: Referência Analógica............................................................................70Figura 4.1.5.1: Curva capabilidade da maquina síncrona................................................71Figura 4.1.5.3.1: Curva atuação limitador térmico de sobre corrente de campo...............72Figura 4.1.5.3.2: Ação do limitador de sobre corrente de campo na curva de capabilidade. .
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 12 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
73Figura 4.1.5.4.1: Ação do limitador de sub corrente de campo na curva de capabilidade..73Figura 4.1.5.5.1: Ação do limitador de subexcitação PxQ na curva de capabilidade..........74Figura 4.1.5.6.1: Ação do limitador de sobrecorrente de armadura na curva de capabilidade................................................................................................................75Figura 4.1.5.7.1: Limitador V / Hz................................................................................75Figura 4.1.6.1: Circuito de escorvamento automático.....................................................76Figura 4.1.6.2: Curva escorvamento automático............................................................77Figura 4.2.1.3.1.1: Sincronizador: exemplo pulsos de largura variável............................78Figura 4.2.1.3.2.1: Sincronizador: exemplo pulsos de frequência variável.......................79Figura 4.5.1: Entrada analógica....................................................................................82Figura 4.5.1.1: Exemplo entrada analógica...................................................................82Figura 4.6.1: Saída analógica.......................................................................................83Figura 4.6.1.1: Exemplo saída analógica.......................................................................83Figura 4.7.1.1: Tipos de pulso IRIG-B...........................................................................84
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 13 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Índice de TabelasTabela 3.1.1: Padrão piscadas led "modo de controle"...................................................48Tabela 3.3.1: Função teclas IHM..................................................................................50Tabela 4.7.1.1: Conteúdo do frame IRIG-B...................................................................87Tabela 4.9.2.1: Lista de eventos.................................................................................105Tabela 6.1.1: Variáveis leitura: Medições analógicas....................................................117Tabela 6.1.2: Variáveis Leitura: Campos de Bits..........................................................118Tabela 6.1.3: Variáveis Leitura: Regulador de Tensão..................................................118Tabela 6.1.4: Variáveis Leitura: Limitadores................................................................119Tabela 6.1.5: Variáveis Leitura: Duplo Canal...............................................................119Tabela 6.1.6: Variáveis Leitura: Sincronizador.............................................................120Tabela 6.1.7: Variáveis Leitura: Tempos de Execução..................................................120Tabela 6.1.8: Variáveis Leitura: Identificação do equipamento.....................................120Tabela 6.1.9: Variáveis Leitura: IRIG-B.......................................................................121Tabela 6.1.1.1: Campos de Bits Somente Leitura: Status Gerais 1................................122Tabela 6.1.1.2: Campos de Bits Somente Leitura: Status Gerais 2................................123Tabela 6.1.1.3: Campos de Bits Somente Leitura: Status limite superior.......................124Tabela 6.1.1.4: Campos de Bits Somente Leitura: Status limite inferior.........................125Tabela 6.1.1.5: Campos de Bits Somente Leitura: Status limites gerais.........................126Tabela 6.1.1.6: Campos de Bits Somente Leitura: Alarmes 1........................................127Tabela 6.1.1.7: Campos de Bits Somente Leitura: Alarmes 2........................................128Tabela 6.1.1.8: Campos de Bits Somente Leitura: Entradas digitais 1............................129Tabela 6.1.1.9: Campos de Bits Somente Leitura: Proteções........................................130Tabela 6.2.1: teste....................................................................................................130Tabela 6.2.2: Variáveis Leitura / Escrita: Regulador de Tensão.....................................131Tabela 6.2.3: Variáveis Leitura / Escrita: Campos de Bits.............................................131Tabela 6.2.4: Variáveis Leitura / Escrita: Saídas Analógicas..........................................131Tabela 6.2.5: Variáveis Leitura / Escrita: Relógio.........................................................132Tabela 6.2.1.1: Campos de Bits Leitura / Escrita: Status gerais 1.................................133Tabela 6.2.1.2: Campos de Bits Leitura / Escrita: Status gerais 2.................................134Tabela 6.2.1.3: Campos de Bits Leitura / Escrita: Saídas digitais..................................135Tabela 6.3.1: Parâmetros: Configuração.....................................................................140Tabela 6.3.2: Parâmetros: Calibração.........................................................................142Tabela 6.3.3: Parâmetros: Limitadores........................................................................144Tabela 6.3.4: Parâmetros: Regulador de Tensão ........................................................146Tabela 6.3.5: Parâmetros: Registro de Eventos...........................................................146Tabela 6.3.6: Parâmetros: Oscilografia.......................................................................146Tabela 6.3.7: Parâmetros: Sincronizador.....................................................................148Tabela 6.3.8: Parâmetros: Campos de Bits..................................................................149Tabela 6.3.9: Parâmetros: Proteção............................................................................149Tabela 6.3.10: Parâmetros: IHM.................................................................................149Tabela 6.3.11: Parâmetros: Bases..............................................................................150Tabela 6.3.1.1: Campos de Bits Parâmetros: Gerais 1..................................................151
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 14 de 173

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1 - DESCRIÇÃO DO EQUIPAMENTO
1.1 - INTRODUÇÃO
O GRTD2000 é um equipamento digital, microprocessado que tem por função o controle de máquinas síncronas. A flexibilidade no ajuste dos parâmetros e da topologia de montagem, associado a possibilidade de criação de funções lógicas, permite o seu uso em uma ampla faixa de aplicações.
Para correntes de excitação até 15A, tem a opção de utilização de módulo de potência incorporado (GPRI2000-15), utilizando tecnologia IGBT. Permite, também, comandar módulos de potência externos com topologias utilizando IGBT ou tiristor.
1.2 - CARACTERÍSTICAS ELÉTRICAS
O GRTD2000 possui as seguintes características elétricas:
1.2.1 - ENTRADAS ANALÓGICAS
• 03 (Três) entradas para realimentação da tensão de armadura. Permite selecionar 4 escalas: 120, 240, 480 e 600 Vca;
• 01 (Uma) entrada para realimentação da tensão do barramento. Permite selecionar 4 escalas: 120, 240, 480 e 600 Vca.
• 03 (Três) entradas para realimentação da corrente de armadura. Permite selecionar duas escalas: 1 e 5 A;
• 01 (Uma) entrada para realimentação da tensão de campo. Permite selecionar 3 escalas: 80, 240 e 720 VDC;
• 02 (Duas) entradas para realimentação da corrente de campo. Mede sinais com amplitude de 0 a 15 Vcc proveniente do transdutor de corrente;
• 02 (Duas) entradas de uso geral (+/-20mA ou +/-10V), configuráveis.
1.2.2 - SAÍDAS ANALÓGICAS
• 02 (Duas) saídas de uso geral (+/-20mA ou +/-10V), configuráveis.
1.2.3 - ENTRADAS DIGITAIS
• 08 (Oito) entradas digitais de uso geral (+24V), configuráveis.
1.2.4 - SAÍDAS DIGITAIS
• 06 saídas digitais a relé, configuráveis;
1.2.5 - PORTAS DE COMUNICAÇÃO
• 01 (Uma) porta RS232 ou RS485 para comunicação via protocolo modbus-slave.
• 01 (Uma) porta RS485 para comunicação via protocolo modbus-slave.
• 01 (Uma) porta ETHERNET para comunicação via protocolo modbus TCP, UDP e outros;
• 01 (Uma) porta CAN para comunicação com módulos de expansão e outros reguladores;
• 01 (Uma) porta dedicada para comunicação entre regulador principal e retaguarda na operação duplo canal;
1.2.6 - BORNES DE LIGAÇÃO
As figuras abaixo apresentam os bornes de conexão elétrica do equipamento:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 15 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 16 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.2.6.1: Vista frontal - Bornes de ligação

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 17 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.2.6.2: Vista lateral esquerda - Bornes de ligação

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.3 - CARACTERÍSTICAS MECÂNICAS
• Caixa compacta e robusta;
• Montado em fundo de painel;
• Conexões elétricas do tipo extraível para maior facilidade de manutenção;
• Material da caixa: Alumínio;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 18 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.2.6.3: Vista lateral direita - Bornes de ligação

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.3.1 - DIMENSÕES
1.3.2 - PESO
Sem potência: 2,7 kg;
Com potência: 4,85 kg;
1.4 - INTERFACE COM O USUÁRIO
• 07 (Sete) Leds de sinalização que permitem uma leitura rápida das condições de operação do regulador;
• 01 (Um) Display alfanumérico LCD para visualização dos estados e parâmetros do regulador;
• 05 (teclas) para navegação e edição dos parâmetros;
1.5 - FUNÇÕES
O GRTD2000 possui as seguintes funções:
• Controle manual de tensão de campo, corrente de campo ou ângulo de disparo do módulo de potência;
• Controle automático da tensão de armadura;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 19 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.3.1.1: Dimensões de altura da GRTD 2000 Com Potência (esquerda) e Sem Potência (direita)
e abaixo as dimensões de largura e comprimento, sendo iguais em ambas.

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
• Estatismo ajustável para operação paralela (Compensação de reativos);
• Estatismos negativo para compensação de queda de linha;
• Controle de fator de potência;
• Controle de potência reativa;
• Estabilizador do sistema de potência – PSS;
• Escorvamento automático na partida, podendo reaplicá-lo durante operação normal, caso a tensão caia abaixo do valor de setpoint;
• Possibilidade de operação duplo canal;
• Opção de operar com módulo de potência incorporado ou separado;
• Relógio com possibilidade de sincronismo com sistema GPS por meio de sinal IRIG-B;
• Registro de eventos digitais, gravados em cartão de memória do tipo SD;
• Registro de oscilografias, gravados em cartão de memória do tipo SD;
• Rampa de subida/descida ajustável para todas as referências de controle;
• Sincronizador – permite ajustar a tensão, frequência e fase do gerador p/ sincronismo com a barra;
• Software para parametrização com interface amigável permitindo efetuar ajuste da programação e monitoramento de todas as funções do regulador;
• Função de seguidor de referência entre reguladores no modo duplo canal ou entre modos de operação no modo canal simples, para que as transferências entre canais ou entre modos de operação no mesmo regulador ocorram de forma suave.
• Lógica programável, permitindo configurar a função das entradas e saídas digitais e analógicas e criar funções lógicas internas, usando portas lógicas, temporizadores, latch´s e etc;
• Distribuição de potência reativa entre máquinas;
• Detecção de falha de diodo girante;
• Comando “zera reativo” para permitir abertura do disjuntor com minima corrente de armadura;
• Possibilidade de atualização do firmware por meio de porta de comunicação serial;
1.6 - LIMITADORES
Possui os seguintes limitadores de modo a garantir uma operação segura da máquina;
• De referencia, máximo/mínimo para todos os modos de controle;
• Das saídas de controle e do ângulo de disparo do módulo de potência;
• Sobrecorrente de campo;
• Subcorrente de campo;
• Subexcitação (PxQ);
• Voltz / Hertz;
• Sobrecorrente de armadura;
1.7 - PROTEÇÕES / ALARMES
O regulador possui diversas proteções e alarmes. A atuação de proteções impedem o regulador de
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 20 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
operar, já os alarmes apenas sinalizam uma condição anormal, porém o regulador continua operando.
1.8 - CARACTERÍSTICAS CLIMÁTICAS
Temperatura ambiente máxima (operação): 60ºC.
Umidade relativa máxima:
Vibração:
Choque:
Altitude:
1.9 - NORMAS APLICÁVEIS
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 21 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.10 - TOPOLOGIAS DE MONTAGEM
O GRTD2000 permite diversas configurações de montagem, abaixo pode-se verificar algumas delas:
1.10.1 - CANAL SIMPLES COM MODULO DE POTENCIA INCORPORADO.
Este é o arranjo mais simples, que necessita o menor numero de conexões, porém esta limitado a uma corrente de excitação máxima de 15A.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 22 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.10.1.1: Topologia Canal Simples com Modulo de Potência Incorporado

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.10.2 - CANAL SIMPLES COM MODULO DE POTÊNCIA SEPARADO
Utilizando-se modulo de potência separado, não há limite de capacidade de corrente, podendo-se utilizar módulos com tecnologia IGBT ou tiristor.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 23 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.10.2.1: Topologia Canal Simples com Modulo de Potência Separado

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.10.3 - CANAL DUPLO COM MODULO DE POTÊNCIA INCORPORADO
Neste arranjo, há uma duplicidade de reguladores, em caso de falha da unidade principal, a retaguarda continua a operar.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 24 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.10.3.1: Topologia Canal Duplo com Modulo de Potência Incorporado

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.10.4 - CANAL DUPLO COM MODULO DE POTENCIA SEPARADO
Neste arranjo os dois reguladores comandam o mesmo modulo de potência. Há redundância de reguladores, mas não de módulos de potência.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 25 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.10.4.1: Topologia Canal Duplo com Modulo de Potência Simples

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.10.5 - CANAL DUPLO COM MODULO DE POTÊNCIA SEPARADO E DISPARO CRUZADO
Neste arranjo há duplicidade de reguladores e módulos de potência. É o arranjo mais confiável de todos.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 26 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.10.5.1: Topologia Canal Duplo com Disparo Cruzado

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.11 - DIAGRAMA DE LIGAÇÃO TÍPICO
Na figura abaixo temos um diagrama de aplicação com as conexões tipicas do regulador:
INSERIR FIGURA
1.12 - CONEXÕES ELÉTRICAS
Nos próximos parágrafos serão detalhadas as conexões elétricas do equipamento.
1.12.1 - ALIMENTAÇÃO
Estes terminais são utilizados para alimentar o equipamento. Podem ser conectados a uma fonte CC ou CA, podendo inclusive ser conectado diretamente nos terminais da máquina, quando este for de baixa tensão e tiver tensão remanente suficiente alta para ligar o regulador.
• Terminais: L1, L2, L3 e TERRA;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Faixa de operação: 20 a 636Vca, 28 a 900Vcc;
• Faixa de frequência: 50 a 1000 Hz;
• Consumo Máximo: 30W;
• Topologias: Monofásica, Trifásica e CC;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 27 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.2 - SAÍDA ISOLADA AUXILIAR P/ ALIMENTAÇÃO MÓDULO DE POTÊNCIA GPRI2000
Fornece uma saída de tensão isolada para alimentar o módulo de potência GPRI2000. Pode ser utilizada para alimentar até dois módulos quando operar com redundância.
• Terminais: +15VI, GNDI, +15VI, GNDI;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Tensão nominal: 15 Vcc;
• Corrente de carga máxima: 100mA;
1.12.3 - SAÍDAS DIGITAIS
Saídas digitais genéricas, com função programável.
• Quantidade: 6;
• Terminais: DO1-A, DO1-B, DO2-A, DO2-B, DO3-A, DO3-B, DO4-A, DO4-B, DO5-A, DO5-B, DO6-A, DO6-B;
• Tipo conector: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Tipo: Relé com contato seco normalmente aberto;
• Carga nominal: 3A a 250VAC, 3A a 30 VDC;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 28 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.1.1: Topologia de alimentação do circuito eletrônico do regulador
Figura 1.12.2.1: Topologia saída auxiliar isolada p/ alimentação módulo de potência GPRI2000
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
• Tensão máxima de manobra: 270 VCA, 125 VDC;
• Corrente máxima de manobra: 5A;
• Isolação: 1000VCA;
1.12.4 - REALIMENTAÇÃO TENSÃO DE ARMADURA.
São utilizados para medir a tensão de armadura. Podem ser conectados diretamente nos terminais da armadura para máquinas de baixa tensão (até 600Vca). Para os demais deve-se utilizar um transformador rebaixador. Pode usar ligação monofásico e trifásico. Possui 4 escalas: 120V, 240V, 480V e 600V;
NOTA: O secundário do transformador rebaixador deve sempre ser aterrado para evitar possibilidade de sobretensões.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 29 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.3.1: Topologia saídas digitais

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
• Terminais: VA1, VA2, VA3;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Topologias: monofásico (A-C), trifásico;
• Escalas: 120, 240, 480, 600 VCA;
• Tensão máxima diferencial (entre fases):189 VAC (escala 120V), 379 VAC (escala 240V), 758 VAC (escala 480V), 948 VAC (escala 600 V);
• Tensão máxima de modo comum (entre fase e terra): 172 VAC (escala 120V), 345 VAC (escala 240V), 691 VAC (escala 480V), 864 VAC (escala 600 V);
• Impedância de entrada: ~= 1 Mohm;
• Estabilidade térmica: +240PPM/ºC;
1.12.5 - REALIMENTAÇÃO TENSÃO DE BARRAMENTO.
São utilizados para medir a tensão do barramento. Podem ser conectados diretamente na barra para máquinas de baixa tensão (até 600Vca). Para os demais deve-se utilizar um transformador rebaixador. Utiliza apenas ligação monofásica. Possui 4 escalas: 120V, 240V, 480V e 600V;
NOTA: O secundário do transformador rebaixador deve sempre ser aterrado para evitar possibilidade de sobretensões.
• Terminais: VB1, VB3;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Topologia: Monofásico (A-C);
• Escalas: 120, 240, 480, 600 VCA;
• Tensão máxima diferencial (entre fases):189 VAC (escala 120V), 379 VAC (escala 240V), 758 VAC (escala 480V), 948 VAC (escala 600 V);
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 30 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.4.1: Topologia realimentação tensão de armadura
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
• Tensão máxima de modo comum (entre fase e terra): 172 VAC (escala 120V), 345 VAC (escala 240V), 691 VAC (escala 480V), 864 VAC (escala 600 V);
• Impedância de entrada: ~= 1 Mohm;
• Estabilidade térmica: +240PPM/ºC;
1.12.6 - REALIMENTAÇÃO TENSÃO DE CAMPO
Utilizados para medir a tensão de campo. Devem ser conectados diretamente aos terminais de campo da máquina. Possui três escalas: 80, 240 e 720 VCC.
• Terminais: VF+, VF-;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Escalas: 80, 240 e 720 VCC;
• Tensão máxima diferencial (entre terminais): 87 VCC (escala 80V), 255 VCC (escala 240V), 780 VCC (escala 720V);
• Tensão máxima de modo comum (entre terminais e o terra): 425 VCC (escala 80V), 490 VCC (escala 240V), 550 VCC (escala 720V);
• Impedância de entrada: ~= 1 Mohm;
• Estabilidade térmica: -70PPM/ºC;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 31 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.5.1: Topologia realimentação tensão de barramento

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.7 - REALIMENTAÇÃO TENSÃO TRANSFORMADOR DE CAMPO
Utilizada para que o regulador possa efetuar o sincronismo dos disparos dos tiristores, sendo necessária apenas quando se utiliza módulos de potência a do tiristor. Possui duas escalas de nível de tensão: 200, 600 VCA, e quatro escalas de frequência de corte do filtro passa baixa: 60, 120, 240 e 290 Hz.
• Terminais: VT1, VT2, VT3;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Escalas tensão: 200, 600 VCC;
• Escalas frequência: 60, 120, 240, 290 Hz;
• Tensão máxima diferencial (entre terminais): 302 VCA (escala 200V), 930 VCA (escala 600V);
• Tensão máxima de modo comum (entre terminais e o terra): 302 VCA (escala 200V), 930 VCA (escala 600V);
• Impedância de entrada: ~= 1 Mohm;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 32 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.6.1: Topologia realimentação tensão de campo

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.8 - REALIMENTAÇÃO CORRENTE DE ARMADURA.
São utilizados para medir a corrente de armadura e devem ser conectados no secundário do TC de medição. Pode-se utilizar ligação monofásica e trifásica. Possui 2 escalas: 1 e 5 ACA;
NOTA: O secundário do transformador de corrente deve sempre ser aterrado para evitar possibilidade de sobretensões.
• Terminais: IA1-S1, IA1-S2, IA2-S1, IA2-S2, IA3-S1, IA3-S2;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Topologias: monofásico (fase B), trifásico;
• Escalas: 1, 5 ACA;
• Corrente máxima: 1,3 ACA (escala 1A), 6,8 ACA (escala 5A);
• Impedância de entrada: < 10 mohm;
• Estabilidade térmica: +50PPM/ºC;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 33 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.7.1: Topologia realimentação tensão transformador de campo

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.9 - REALIMENTAÇÃO CORRENTE DE CAMPO
São utilizados para medir a corrente de campo e devem ser conectados no secundário do TC de efeito hall ou transdutor de corrente. Possui duas entradas para poder medir a corrente total quando estiver operando com redundância de módulos de potência. Fornece também tensões auxiliares de +/- 15V para alimentação do TC ou outro transdutor. A entrada é do tipo tensão, operando na faixa de +/- 10V.
NOTA: Recomenda-se utilizar cabo blindado para esta conexão.
• Terminais: IF-1, IF-2, +15VA, GNDA, -15VCA, TERRA;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Faixa de medição : +/- 10V;
• Impedância de entrada: 100 kohm;
• Corrente máxima fornecida pela fonte: 50 mA;
• Estabilidade térmica: -350PPM/ºC;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 34 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.8.1: Topologia realimentação corrente de armadura

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.10 - ENTRADAS ANALÓGICAS
São entradas genéricas cuja função deve ser programada pelo usuário. A mesma entrada pode medir sinais de tensão ou corrente dependendo do borne onde é ligado. Disponibiliza também uma fonte auxiliar p/ poder conectar um potenciômetro externo.
NOTA: Recomenda-se utilizar cabo blindado para esta conexão.
• Quantidade: 2;
• Terminais: AIV1+, AII1+, AII1-, AIV1-, AIV2+, AII2+, AII2-, AIV2-, +10VA, GNDA, -10VA, TERRA;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Faixa de medição : +/- 10V, +/- 20mA;
• Impedância de entrada: 200 kohm (tensão), 220R (corrente);
• Impedância saída fonte auxiliar: 4,7 kohm;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 35 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.9.1: Topologia realimentação corrente de campo

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
• Estabilidade térmica: +100 PPM/ºC;
1.12.11 - SAÍDAS ANALÓGICAS
São saídas genéricas cuja função deve ser programada pelo usuário. A mesma saída pode gerar sinais de tensão ou corrente.
NOTA: Recomenda-se utilizar cabo blindado para esta conexão.
• Quantidade: 2;
• Terminais: AO1, GNDA, AO2, GNDA;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Faixa de operação : +/- 10V, +/- 20mA;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 36 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.10.1: Topologia entrada analógica
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
• Corrente máxima de saída (curto circuito): +/- 20mA (tensão), +/- 38 mA (corrente);
• Tensão máxima de saída: xxxx (tensão), xxxxxxx (corrente);
• Estabilidade térmica: +50 PPM/ºC (tensão), -700 PPM/ºC (corrente);
1.12.12 - ENTRADAS DIGITAIS
Entradas digitais genéricas, com função programável. A entrada 7 pode também ser utilizada para receber sinal IRIG-B para sincronismo do relógio e a entrada 8 pode ser utilizada para contagem de pulsos para medição de velocidade.
NOTA: Para uma melhor desempenho do controle de velocidade, recomenda-se utilizar um transdutor que forneça frequência maior que 100 Hz.
• Quantidade: 8;
• Terminais: DI1, DI2, DI3, DI4, DI5, DI6, DI7/IR, DI8/SP, +24VD, GNDD;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
• Tensão nominal: 24V;
• Tensão mínima: 5V;
• Impedância de entrada: 10 kohms;
• Impedância saída da fonte auxiliar: 220 ohms;
• Frequência máxima medição velocidade: 150 kHz;
• Frequência mínima medição velocidade: 1 Hz;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 37 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.11.1: Topologia saídas analógicas

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.13 - DISPARO MÓDULO DE POTÊNCIA EXTERNO
Interface utilizada para comandar módulos de potência externos. Pode comandar até dois módulos operando em paralelo (redundância), para isso deve-se utilizar um cabo com duas terminações, uma para cada módulo. Utiliza conector do tipo DB15 macho no regulador e DB15 fêmea no modulo de potência. Para os reguladores com módulo de potência incorporado, não é necessário efetuar essa ligação, pois a mesma já é feita internamente.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 38 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.12.1: Topologia entradas digitais

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
NOTA: Recomenda-se utilizar cabo blindado para esta conexão.
• Quantidade: 1;
• Terminais: PRO;
• Tipo: DB15 macho;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 39 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.13.1: Topologia conexão de modulo de potência externo

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.14 - PORTA DE COMUNICAÇÃO COM1 RS-232
Porta de comunicação serial padrão RS-232. Esta mesma porta pode ser acessada utilizando o padrão RS-485, bastando configurar nas chaves de seleção.
NOTA: Recomenda-se utilizar cabo blindado para esta conexão.
• Quantidade: 1;
• Terminais: COM1 (RS232);
• Tipo: DB9 macho;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 40 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.13.2: Pinagem cabo de conexão com o modulo de potência externo

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.15 - PORTA DE COMUNICAÇÃO COM1 RS-485
Porta de comunicação serial padrão RS-485. Esta mesma porta pode ser acessada utilizando o padrão RS-232, bastando configurar nas chaves de seleção.
NOTA: Recomenda-se utilizar cabo blindado para esta conexão.
• Quantidade: 1;
• Terminais: COM1-A, COM1-B, GNDD, TERRA;
• Tipo: Borne parafusado extraível;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 41 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.14.1: Topologia conexão COM1 - RS232
Figura 1.12.14.2: Pinagem cabo conexão COM1 - RS232

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
• Bitola condutor: 0,2 a 2,5 mm2
1.12.16 - PORTA DE COMUNICAÇÃO COM2 RS-485
Porta de comunicação serial padrão RS-485. Possui a mesma funcionalidade da porta COM1, porém só pode ser acessada através da interface RS-485.
NOTA: Recomenda-se utilizar cabo blindado para esta conexão.
• Quantidade: 1;
• Terminais: COM2-A, COM2-B, GNDD, TERRA;
• Tipo: Borne parafusado extraível;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 42 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.15.1: Topologia conexão COM1 - RS485

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
• Bitola condutor: 0,2 a 2,5 mm2
1.12.17 - PORTA DE COMUNICAÇÃO CAN
Porta de comunicação CAN utilizada para comunicação futura com módulos de expansão e outros equipamentos.
NOTA: Recomenda-se utilizar cabo blindado para esta conexão.
• Quantidade: 1;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 43 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.16.1: Topologia conexão COM2 - RS485

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
• Terminais: CANH, CANL, GNDD, TERRA;
• Tipo: Borne parafusado extraível;
• Bitola condutor: 0,2 a 2,5 mm2
1.12.18 - PORTA DE COMUNICAÇÃO ETHERNET
Porta de comunicação Ethernet.
NOTA: Recomenda-se utilizar cabo blindado para esta conexão.
• Quantidade: 1;
• Terminais: ETH;
• Tipo: RJ45;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 44 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.18.1: Topologia conexão Ethernet
Figura 1.12.17.1: Topologia conexão CAN

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1.12.19 - PORTA DE COMUNICAÇÃO DUPLO CANAL
Porta de comunicação utilizada para troca de informações entre reguladores na operação duplo canal.
• Quantidade: 1;
• Terminais: COM-DC;
• Tipo: RJ25;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 45 de 173
DES
CR
IÇÃ
O D
O E
QU
IPA
MEN
TOD
ESC
RIÇ
ÃO
DO
EQ
UIP
AM
ENTO
Figura 1.12.19.1: Topologia conexão COM-DC

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
2 - INSTALAÇÃO
2.1 - FIXAÇÃO E POSIÇÃO
Este equipamento deve ser montado fixado a uma superfície plana, preferencialmente na posição vertical.
Deve-se tomar cuidado também com a temperatura ambiente que não deve exceder o máximo especificado no capitulo 1.8-Características Climáticas.
Deixar um espaço livre acima e abaixo do equipamento de pelo menos 100mm para não dificultar o manuseio das conexões elétricas
Deve ser instalado em local seco e limpo.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 46 de 173
INST
ALA
ÇÃ
OIN
STA
LAÇ
ÃO
Figura 2.1.1: Medidas entre furos de fixação da GRTD 2000.

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
2.2 - ATERRAMENTO
A carcaça deve ser aterrada com cabo maior que 4mm2.
A conexão de terra da entrada da fonte de alimentação também deve ser aterrada com cabo 2,5mm2.
Recomenda-se que os demais equipamentos conectados ao GRTD2000 também sejam aterrados, de preferencia no mesmo barramento e com cabos separados para cada um.
O GRTD2000 disponibiliza ainda conexões de terra em borne parafusado junto aos sinais de entrada analógica, saída analógica e comunicações que devem ser utilizadas para conectar as malhas de aterramento dos cabos utilizados na sua instalação.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 47 de 173
INST
ALA
ÇÃ
OIN
STA
LAÇ
ÃO

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
3 - INTERFACE HOMEM MÁQUINA - IHM
3.1 - LEDS
O regulador possui alguns leds de sinalização p/ informar a situação da operação. São eles:
Principal / Retaguarda
Quando aceso indica que o regulador está operando como principal num arranjo duplo canal. Ou seja, está controlando a excitatriz estática.
Quando estiver apagado indica que o regulador esta operando como retaguarda ou está em falha.
Se estiver operando no modo canal simples (um regulador), este led deve necessariamente estar aceso.
UP1 Ok
Em funcionamento normal este led permanece piscando. Se estiver constantemente aceso ou apagado, indica falha no processador número 1.
Modo de Controle.
O padrão das piscadas indica o modo de controle do regulador de tensão, de acordo com a relação abaixo:
Padrão das piscadas Modo de operação
Apagado Parado
Piscando continuamente (5Hz) Falha
1 piscada por período Modo manual: controlando ângulo de disparo da excitatriz
2 piscada por período Modo manual: controlando tensão de campo
3 piscada por período Modo manual: controlando corrente de campo
4 piscada por período Modo automático: controlando tensão de armadura
5 piscada por período Modo automático: controlando tensão de armadura com estatismo (droop)
6 piscada por período Modo FP: controlando fator de potência
7 piscada por período Modo VAr: controlando potência reativa
Tabela 3.1.1: Padrão piscadas led "modo de controle"
Alarmes / Proteções
Este led indica a presença de algum alarme ou proteção. Se estiver piscando indica presença de alarme se estiver sempre aceso indica proteção atuada, ou falha do regulador.
Limite Superior / Inferior
O padrão das piscadas indica qual limitador está atuando. Se permanece mais tempo aceso significa que está em limite superior (razão cíclica maior que 50%). Se permanecer mais tempo apagado
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 48 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
significa que está em limite inferior (razão cíclica menor que 50%). Se permanecer mesmo tempo aceso a apagado significa que está em limite superior e inferior (razão cíclica igual a 50%).
MC SD Parado
Quando aceso indica que o cartão de memória está liberado para extração.
Nota: Nunca remover o cartão de memória se este led estiver apagado.
UP2 Ok
Em funcionamento normal este led permanece piscando. Se estiver constantemente aceso ou apagado, indica falha no processador número 2.
3.2 - CHAVES DE CONFIGURAÇÃO
O equipamento possui algumas chaves na parte frontal para configuração de algumas funções especiais do regulador, abaixo está descrito a função de cada uma destas chaves:
S1 – Seleciona interface p/ COM1:
0 = RS-232;
1 = RS-485;
S2 e S3 – Conectam a porta COM1 RS-232 ao uP 2 para atualização do firmware.
0 = Operação Normal ou atualização do firmware do uP 1 pela serial;
1 = Atualização do firmware do uP2 pela serial;
S4 – Esta chave possui 4 manoplas com as seguintes funções:
S4-1 – Utilizada para colocar o processador em modo de inicialização pela serial (COM1). Quando estiver nesse modo, pode efetuar a atualização do firmware do regulador.
ON = Os processadores aguardam para receber o novo firmware pela porta serial;
OFF = Operação normal;
S4-2 – Endereço padrão para COM1, COM2 e Ethernet.
ON = Portas de comunicação com configuração padrão (default) de velocidade e endereço.
Endereço = 247 (COM1 e COM2);
Velocidade = 9600 BPS (COM1 e COM2);
IP = 1.0.0.1 (Ethernet);
OFF = Portas de comunicação com configuração dada pelos parâmetros.
S4-3 – Reserva
S4-4 – Reserva
ST SD – Quando pressionado interrompe a escrita no cartão de memória SD. Sempre deve ser pressionado quando for remover ou inserir o cartão.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 49 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
3.3 - TECLADO
Possui 5 teclas para navegação e edição de parâmetros com as seguintes funções:
Tecla Função em modo navegação Função em modo edição
OK Se cursor estiver sobre um parâmetro, entra em modo edição.
Salva parâmetro na memória não volátil e saí do modo de edição.
▲ Move cursor para cima Aumenta o valor do parâmetro
▼ Move cursor para baixo Diminui o valor do parâmetro
► Entra no submenu da linha marcada pelo cursor
Atualiza parâmetro apenas na memória RAM e continua no modo de edição.
◄ Retorna para menu anterior Saí do modo edição sem atualizar parâmetro.
◄ + ▲ Aumenta contraste
◄ + ▼ Diminui contraste
◄ + OK Acessa tela de senha
Tabela 3.3.1: Função teclas IHM
3.4 - DISPLAY
Consiste num display alfanumérico de 4 linha por 20 colunas onde é possível navegar pelos parâmetros e visualizar alarmes e status de operação do regulador. Possui iluminação de fundo que acende sempre que uma tecla for pressionada permanecendo assim por um tempo configurado pelo usuário. Pode optar por deixar a iluminação de fundo sempre acesa ou sempre apagada também.
Na primeira linha no canto esquerdo setas verticais (↑ ↓ ↕) indicam onde outras linhas não mostradas no display estão disponíveis. Ao lado destas setas aparece o nome do menu que está sendo visualizado.
Um cursor representado por uma linha horizontal (→) a esquerda, marca qual linha está ativa.
Um submenu é representado pelo nome seguido da seta (→), enquanto que o parâmetro é representado pelo nome seguido de “=” e do valor do parâmetro.
Um cursor piscando a esquerda do parâmetro, indica que está em modo de edição, permitindo desta forma alterar o seu valor.
Na figura abaixo são mostrados os elementos que compõem o gráfico do display.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 50 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
3.4.1 - TELA INICIAL
Ao energizar o regulador, o display exibe por alguns segundos a tela de abertura, com informações sobre a versão do firmware dos dois processadores utilizados e o número de série do regulador. A figura abaixo apresenta o modelo desta tela:
3.5 - SENHA
A edição de parâmetros pode ser protegida por senha. A configuração é feita na tela de senhas, que pode ser acessada através do menu principal ou pressionando-se as teclas “◄ + OK”. A figura abaixo mostra o formato desta tela:
3.5.1 - ATIVANDO A SENHA
Se a senha estiver desativada, ao pressionar “OK” o cursor piscará ao lado do primeiro digito do campo “Valor”. Altere o valor deste digito e pressione “OK”, o cursor passará a piscar ao lado do segundo digito. Altere o valor e pressione “OK”. Repita os passos anteriores para entrar com o terceiro e quarto digito. Ao final quando pressionar “OK”, o cursor piscará ao lado do campo “Status”. Basta alterá-lo para “Ativado” e pressionar “OK”
A senha será o valor digitado no campo “Valor”
3.5.2 - DESATIVANDO A SENHA
Entre com a senha no campo “Valor” procedendo da seguinte maneira: ao pressionar “OK” o cursor piscará ao lado do primeiro digito do campo “Valor”. Altere o valor deste digito e pressione “OK”, o cursor passará a piscar ao lado do segundo digito. Altere o valor e pressione “OK”. Repita os passos anteriores para entrar com o terceiro e quarto digito. Ao final quando pressionar “OK” estando a senha correta, o cursor piscará ao lado do campo “Status”. Basta alterá-lo para “Desativado”. Se entrar com o valor de senha incorreto, o cursor não piscará ao lado do parâmetro “Status”, portanto não permitindo a sua edição.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 51 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
↑*** Parametros ***→Parametro1 = 589 Submenu1 → Submenu2 →
Grameyer GRTD2000uP1 SW Rev: 1.00.0uP2 SW Rev: 2.00.1 SN: 5A97F315
******* SENHA ****** Valor: 1234
Status: Ativado

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
3.6 - MAPA DE TELAS/PARÂMETROS
Não é possível acessar todos os parâmetros do regulador através do display. Para acesso completo aos parâmetros, deve-se utilizar o software de programação.
As figuras abaixo mostram os dados disponíveis nos menus e sub menus do regulador.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 52 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 53 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 1 Nível 2
**** PRINCIPAL **** Leituras → Bases → Parâmetros →
**** LEITURAS ***** Medições → Status → Regulador Tensão → Limitadores → Duplo Canal → Sincronizador → Tempos Execução → Identificações →
**** MEDIÇÕES ***** Armadura → Barramento → Campo → Entradas Analog. → Turbina →
Nível 3

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 54 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 5Nível 4
**** ARMADURA ***** varm_ab = 00.00 kV varm_bc = 00.00 kV varm_ca = 00.00 kV iarm_a = 00.00 kA iarm_b = 00.00 kA iarm_c = 00.00 kA farm = 00.00 Hz ang_ca_b= 000.0 º fp = 0.000 pot_s = 00.00 kVA pot_p = 00.00 kW pot_q = 00.00 kVAr varm = 00.00 kV Iarm = 00.00 kA
*** BARRAMENTO **** vbus_ca = 00.00 kV ang_bus_arm= 000.0º fbus = 00.00 Hz
****** CAMPO ****** vfld = 00.00 kV ifld_pt1 = 00.00 kA ifld_pt2 = 00.00 kA ifld = 00.00 kA
* ENTRADAS ANALOG * in_g1 = 00.00 V in_g2 = 00.00 V
***** TURBINA ***** veloc. = 00.00 RPM

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 55 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
***** STATUS ****** Gerais → Limites → Alarmes → Entradas Digit. → Proteções →
Nível 1 (cont.) Nível 2 (cont.) Nível 3 (cont.)

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 56 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 4 (cont.) Nível 5 (cont.)
***** GERAIS ****** rt_escorv_out = OFF pt_outro_ativ = OFF par_difer = OFF mc_stop = OFF pt_meu_ativ = OFF os_fim = OFF si_sincr = OFF si_varm_ok = OFF si_freq_ok = OFF si_fase_ok = OFF si_f_up = OFF si_f_dw = OFF si_v_up = OFF si_v_dw = OFF log_difer = OFF pt_falha = OFF
***** LIMITES ***** Superior → Inferior → Gerais →
**** SUPERIOR ***** iexc = OFF iarm = OFF ref_man = OFF ref_uarm = OFF ref_fp = OFF ref_q = OFF contr_sec = OFF contr_pri = OFF
**** INFERIOR ***** iexc = OFF iarm = OFF PxQ = OFF ref_man = OFF ref_uarm = OFF ref_fp = OFF ref_q = OFF contr_sec = OFF contr_pri = OFF
***** GERAIS ****** vhz = OFF iarm_out_max = OFF iarm_out_min = OFF

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 57 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 1 (cont.) Nível 2 (cont.) Nível 3 (cont.)

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 58 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 4 (cont.) Nível 5 (cont.)
***** ALARMES ***** load_par = OFF store_par = OFF erase_par = OFF com_dc = OFF ponte = OFF sincr_dc = OFF re_buffer = OFF load_log = OFF store_log = OFF erase_log = OFF logica = OFF mem_card = OFF rt_escor_exc = OFF si_sincr = OFF sa1 = OFF sa2 = OFF realim_varm = OFF cod_desbloq = OFF
* ENTRADAS DIGIT ** ED_00 = OFF ED_01 = OFF ED_02 = OFF ED_03 = OFF ED_04 = OFF ED_05 = OFF ED_06 = OFF ED_07 = OFF ED_08 = OFF ED_09 = OFF ED_10 = OFF ED_11 = OFF ED_12 = OFF ED_13 = OFF ED_14 = OFF ED_15 = OFF
**** PROTEÇÕES **** comun_uP2 = OFF

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 59 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 1 (cont.) Nível 2 (cont.) Nível 3 (cont.)
* REGULADOR TENSAO* saida = 000 % ref_pri = 00.00 ref_sec = 00.00 modo_op = comp_q = 00.00% saida_sec = 000 %
*** LIMITADORES *** iexc_ter = 00.00 kA pq_Q = 00.00 kVAr vhz_out = 00.00 % iarm_out = 00.00 %
*** DUPLO CANAL *** saida_ot = 000 % modo_meu = modo_ot = prior_me =
** SINCRONIZADOR ** v_out = 000 % f_out = 000 %
** TEMPOS EXECUC ** log_max = 000 ms log_med = 000 ms log_per_max= 000 ms log_per_med= 000 ms

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 60 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 4 (cont.) Nível 5 (cont.)

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 61 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
* IDENTIFICAÇÕES ** s/n = 00000000 soft_uP1 = 0.00.0 soft_uP2 = 0.00.0 hab_func →
Nível 1 (cont.) Nível 2 (cont.) Nível 3 (cont.)

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 62 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 4 (cont.) Nível 5 (cont.)
*** HAB_FUNCOES *** func 01 OFF func 02 OFF func 03 OFF func 04 OFF func 05 OFF func 06 OFF func 07 OFF func 08 OFF func 09 OFF func 10 OFF func 11 OFF func 12 OFF func 13 OFF func 14 OFF func 15 OFF func 16 OFF func 17 OFF func 18 OFF func 19 OFF func 20 OFF func 21 OFF func 22 OFF func 23 OFF func 24 OFF func 25 OFF func 26 OFF func 27 OFF func 28 OFF func 29 OFF func 30 OFF func 31 OFF func 32 OFF

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 63 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 1 (cont.) Nível 2 (cont.) Nível 3 (cont.)
****** BASES ****** varm_pri = 00.00 V varm_sec = 00.00 V iarm_pri = 00.00 A iarm_sec = 00.00 A vfld_pri = 00.00 V vfld_sec = 00.00 V ifld_pri = 00.00 A ifld_sec = 00.00 V
*** PARAMETROS **** Display →
***** DISPLAY ***** modo = AUTO tempo = 00000 s

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 64 de 173
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
INTE
RFA
CE
HO
MEM
MÁ
QU
INA
- I
HM
Nível 4 (cont.) Nível 5 (cont.)
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4 - DESCRIÇÃO FUNCIONAL
O equipamento GRTD2000 apresenta diversas funções e blocos lógicos. Nos próximos capítulos serão descritos cada um destes blocos, os parâmetros de configuração e suas respectivas interfaces de entrada e saída.
4.1 - REGULADOR DE TENSÃO
Este bloco lógico implementa a função de um regulador de tensão possuindo diversos modos de controle, limitadores e alarmes, fornecendo uma solução completa para o controle de excitação de máquinas síncronas.
4.1.1 - MODOS DE CONTROLE
O regulador de tensão possui basicamente duas malhas de controle, uma primária cuja referência pode ser a tensão de armadura (automático), tensão de campo (manual tensão), corrente de campo (manual corrente) ou ângulo de disparo (manual ângulo). A saída desta malha atua diretamente sobre o módulo de potência e consequentemente sobre a tensão de campo. A malha secundária pode ter como referência a potência reativa ou o fator de potência, e a saída atua diretamente sobre a referência da malha primária.
4.1.1.1 - MALHA PRIMÁRIA
Quanto a variável controlada, pode ser dividido em dois modos:
– Modo Manual;
– Modo Automático;
4.1.1.1.1 - MODO MANUAL
Neste modo de operação, a variável controlada está relacionada ao campo da máquina, pode ser dividido em três modos:
– Controle Corrente de Campo;
– Controle Tensão de Campo;
– Controle do Ângulo de Disparo;
Controle de Corrente de Campo
A variável controlada é a corrente de campo. O regulador irá ajustar automaticamente o ângulo de disparo da ponte retificadora de modo a manter a corrente de campo constante e igual ao valor ajustado na referência. A figura abaixo mostra esta malha de controle:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 65 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Controle de Tensão de Campo
Neste modo, a variável controlada é a tensão de campo. O regulador irá ajustar automaticamente o angulo de disparo da ponte retificadora de modo a manter a tensão de campo constante e igual ao valor ajustado na referência. A figura abaixo mostra esta malha de controle:
Tanto no modo de controle de corrente, como de tensão, é utilizado um controlador do tipo PI (proporcional + integral).
Controle de Ângulo de Disparo do Módulo de Potência
Neste modo, a variável controlada é o ângulo de disparo do módulo de potência. O regulador irá dispará-lo com um ângulo fixo, definido através da referencia de modo manual.
Todos os modos de controle manual, utilizam os mesmos parâmetros para sua configuração, assim ao
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 66 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.1.1.1.1: Malha controle corrente de campo
Figura 4.1.1.1.1.2: Malha controle tensão de campo
Figura 4.1.1.1.1.3: Malha controle ângulo de disparo

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
mudar entre os modos manual, atentar para o risco de uma instabilidade, devido ao fato de usar os mesmos ganhos PI para todos os modos.
4.1.1.1.2 - MODO AUTOMÁTICO
Neste modo de operação, a variável controlada é a tensão de armadura da máquina.
Quanto a natureza da carga do gerador, pode ser dividido em dois modos:
– Operação Singela ou Isolada;
– Operação Paralela com Compensação de Reativos;
Operação Singela
Neste modo de operação, a variável controlada é a tensão de armadura. O regulador irá ajustar automaticamente o angulo de disparo da ponte retificadora de modo a manter a tensão de armadura constante e igual ao valor ajustado na referência.
Este modo de operação destina-se a geradores que operam de forma solitária (somente um gerador + cargas), já que o regulador não leva em conta a potência reativa da máquina, usando como variável controlada somente a tensão de armadura.
Operação Paralela com Compensação de Reativos
Neste modo de controle, a referência do regulador de tensão continua sendo a tensão de armadura, porém, ela varia de acordo com as variações da potência reativa e do ganho “Droop”. Na prática, isto funciona da seguinte maneira: Estando a máquina conectada a um barramento infinito, com tensão igual a própria referência do regulador, ao variar a tensão do barramento, ocorrerá uma variação na potência reativa. Essa variação na potência reativa é somada a referência de tensão, fazendo com que a mesma acompanhe a tensão do barramento.
Compensação de reativos funciona apenas no modo automático.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 67 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.1.1.2.1: Malha controle tensão de armadura

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.1.1.2 - MALHA SECUNDÁRIA
Está malha de controle deve ser habilitada somente para operação em paralelo do regulador com outro regulador ou do regulador com barramento infinito. A saída de controle desta malha atua sobre a referência da malha primária.
Quanto a variável controlada, pode ser dividido em dois modos:
– Modo Controle de Potência Reativa;
– Modo Controle de Fator de Potência;
Modo Controle de Potência Reativa
Neste modo de controle, a referência do regulador de tensão passa a ser a potência reativa. O regulador irá modificar a referência da malha de controle primária de modo a manter constante a potência reativa gerada pela máquina.
A malha primária pode estar operando no modo manual ou automático, com ou sem compensação de reativos.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 68 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.1.1.2.2: Malha controle tensão de armadura com compensação de reativos
Figura 4.1.1.2.1: Malha controle potência reativa

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Modo Controle de Fator de Potência
Neste modo de controle, a referência do regulador de tensão passa a ser o fator de potência. O regulador irá modificar a referência da malha de controle primária de modo a manter constante o fator de potência gerado pela máquina.
A malha primária pode estar operando no modo manual ou automático, com ou sem compensação de reativos.
4.1.2 - COMUTAÇÃO SUAVE ENTRE MODOS DE OPERAÇÃO
Ao comutar entre modos de controle o regulador pode atuar de duas formas: Mantendo o mesmo ponto de operação de antes da comutação (transferência suave) ou indo para referencia inicial do novo modo de controle. A seleção desta função é feito por meio do ajuste dos parâmetros.
4.1.3 - RAMPA DE REFERÊNCIA
Todos as referências de controle possuem um limitador de taxa de variação, isso significa que ao habilitar o regulador ou modificar o valor de qualquer referência, o regulador o fará em rampa suave. A taxa de variação (inclinação da rampa) é ajustável. A figura abaixo mostra a variação da referência para uma entrada em degrau.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 69 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.1.2.2: Malha controle fator de potência

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.1.4 - REFERÊNCIA POR ENTRADA ANALÓGICA
Todas as referências de controle do regulador de tensão possuem associadas uma segunda variável que atua no ponto de soma junto com a referência, esta variável é utilizada para modificar a referência do regulador por meio da entrada analógica e deve ser conectada ao bloco de entrada analógica por meio da lógica programável. A figura abaixo ilustra como a referência analógica atua sobre a referência de controle.
4.1.5 - LIMITADORES
O GRTD2000 possui diversos limitadores que tem pro objetivo manter a operação da máquina dentro dos seus limites de segurança.
Alguns destes limites são definidos pela curva de “Capabilidade” da máquina. Está curva relaciona quais combinações de potência ativa e reativa são admissíveis para uma operação estável e segura.
A figura a seguir mostra um exemplo do formato desta curva com os limites operacionais da máquina:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 70 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.3.1: Rampa de referência
Figura 4.1.4.1: Referência Analógica
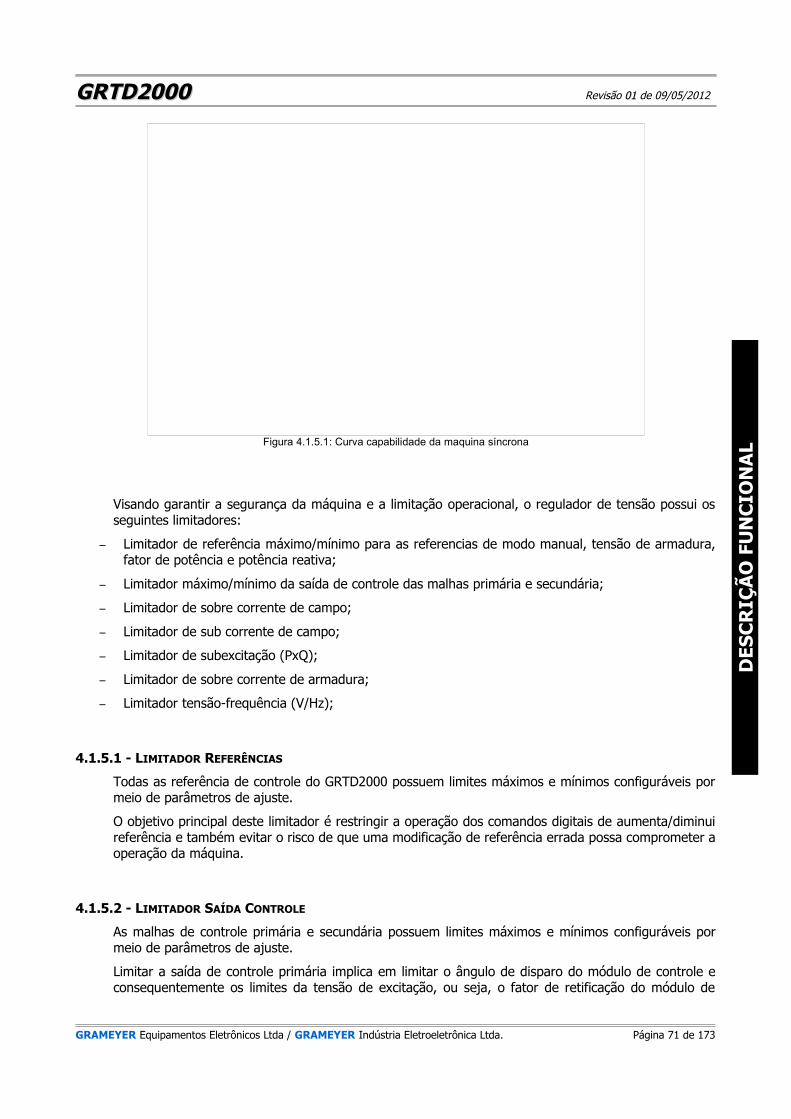
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Visando garantir a segurança da máquina e a limitação operacional, o regulador de tensão possui os seguintes limitadores:
– Limitador de referência máximo/mínimo para as referencias de modo manual, tensão de armadura, fator de potência e potência reativa;
– Limitador máximo/mínimo da saída de controle das malhas primária e secundária;
– Limitador de sobre corrente de campo;
– Limitador de sub corrente de campo;
– Limitador de subexcitação (PxQ);
– Limitador de sobre corrente de armadura;
– Limitador tensão-frequência (V/Hz);
4.1.5.1 - LIMITADOR REFERÊNCIAS
Todas as referência de controle do GRTD2000 possuem limites máximos e mínimos configuráveis por meio de parâmetros de ajuste.
O objetivo principal deste limitador é restringir a operação dos comandos digitais de aumenta/diminui referência e também evitar o risco de que uma modificação de referência errada possa comprometer a operação da máquina.
4.1.5.2 - LIMITADOR SAÍDA CONTROLE
As malhas de controle primária e secundária possuem limites máximos e mínimos configuráveis por meio de parâmetros de ajuste.
Limitar a saída de controle primária implica em limitar o ângulo de disparo do módulo de controle e consequentemente os limites da tensão de excitação, ou seja, o fator de retificação do módulo de
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 71 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
ALFigura 4.1.5.1: Curva capabilidade da maquina síncrona

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
potência.
O limite de saída do controle secundário, tem por objetivo restringir a variação na referência de tensão (malha primária) e consequentemente há variações permitidas na tensão terminal visando corrigir o Fator de potência ou potência reativa.
Só tem efeito quando estiver operando nos modos “Controle de FP” ou “Controle de Reativo”;
4.1.5.3 - LIMITADOR SOBRECORRENTE DE CAMPO
A ação deste limitador está dividida em duas partes:
– Limitador de sobrecorrente máxima;
– Limitador de sobrecorrente térmico;
O limitador de sobrecorrente máxima possui ação instantânea e visa proteger a ponte retificadora contra sobrecarga. Caso a corrente de campo ultrapasse o valor máximo, instantaneamente haverá uma redução na tensão de campo, até que o valor de corrente esteja dentro dos limites;
O limitador de sobrecorrente térmico possui uma ação retardada e visa proteger o enrolamento de campo contra sobreaquecimento. A ação retardada visa se adequar a dinâmica térmica do enrolamento, possibilitando ao regulador responder a transientes que exigem uma sobreexcitação sem com isso comprometer o enrolamento do ponto de vista do aquecimento. Caso a sobreexcitação permaneça, ocasionará atuação do limitador mantendo a corrente dentro do limite térmico. A curva de atuação apresenta um comportamento inverso, ou seja quanto mais a corrente de campo exceder o limite térmico, mais rápido será a sua atuação, conforme pode ser observado na figura abaixo:
Na figura abaixo pode-se verificar a ação do limitador sobre a curva de capabilidade:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 72 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.5.3.1: Curva atuação limitador térmico de sobre corrente de campo

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.1.5.4 - LIMITADOR SUBCORRENTE DE CAMPO
O limitador de subcorrente possui ação instantânea e visa proteger a máquina contra perda de excitação. Caso a corrente de campo caia abaixo do valor mínimo, instantaneamente haverá um aumento na tensão de campo, até que o valor de corrente esteja dentro dos limites;
Na figura abaixo pode-se verificar a ação do limitador sobre a curva de capabilidade:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 73 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.5.3.2: Ação do limitador de sobre corrente de campo na curva de capabilidade
Figura 4.1.5.4.1: Ação do limitador de sub corrente de campo na curva de capabilidade

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.1.5.5 - LIMITADOR DE SUBEXCITAÇÃO (PXQ)
O limitador de subexcitação possui ação instantânea e visa proteger a máquina contra perda de sincronismo por subexcitação. Caso a potência reativa da máquina subexcitada cruze com a linha de atuação do limitador, instantaneamente haverá um aumento na tensão de campo, até que o valor de potência reativa esteja dentro dos limites.
A linha de atuação do limitador é formada por um segmento de reta definido pelo ponto P1 e pela tangente do ângulo “α”.
Na figura abaixo pode-se verificar a ação do limitador sobre a curva de capabilidade:
4.1.5.6 - LIMITADOR DE SOBRECORRENTE DE ARMADURA
O limitador de sobrecorrente máxima possui ação instantânea e ultrapassado o seu limite, provoca uma variação na referência da tensão de armadura, visando reduzir a potência reativa e consequentemente a corrente de armadura.
O limitador de sobrecorrente de armadura não atua diretamente sobre a corrente de campo, mas sobre a referência de tensão de armadura, aumentando-a se a máquina estiver na região de subexcitação e diminuindo-a se estiver na região de sobreexcitação.
A ação deste limitador é sempre no sentido de reduzir a potência reativa da máquina, caso já seja igual a zero, a atuação do limitador não terá nenhum efeito, pois já atingiu o seu limite de atuação.
Na figura abaixo pode-se verificar a ação do limitador sobre a curva de capabilidade:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 74 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.5.5.1: Ação do limitador de subexcitação PxQ na curva de capabilidade

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.1.5.7 - LIMITADOR TENSÃO-FREQUÊNCIA (V/HZ)
Este limitador tem por objetivo manter a relação Tensão/Frequência constante e com isto garantir que não ocorra saturação da maquina e outros dispositivos magnéticos a ela conectados;
Se a frequência da máquina cai abaixo de um valor definido (joelho), a referência de tensão de armadura é reduzida numa proporção programada (queda V/Hz), mantendo assim a razão Tensão/Frequência constante.
A figura abaixo ilustra o comportamento da referência de tensão em função da frequência:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 75 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.5.6.1: Ação do limitador de sobrecorrente de armadura na curva de capabilidade
Figura 4.1.5.7.1: Limitador V / Hz

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.1.6 - ESCORVAMENTO AUTOMÁTICO
O regulador de tensão pode comandar um circuito externo para efetuar o escorvamento (injeção de tensão proveniente de uma fonte externa no campo) da máquina automaticamente durante a partida do regulador ou durante a operação normal sempre que a tensão de armadura caia abaixo do nível de ajuste do escorvamento. O comando deve ser feito por meio de uma saída digital conforme pode ser visto na figura abaixo:
A figura abaixo mostra a ação do escorvamento em função da tensão de armadura:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 76 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.6.1: Circuito de escorvamento automático

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.2 - REGULADOR DE VELOCIDADE
Este bloco lógico implementa a função de um regulador de velocidade possuindo diversos modos de controle, limitadores e alarmes. Possui duas saídas controle, podendo ser utilizado também no controle de velocidade de turbinas Kaplan, onde uma das saídas controla a abertura do distribuidor e outra o ângulo de ataque das pás do rotor.
4.2.1 - MODOS DE CONTROLE
O regulador de velocidade possui basicamente quatro malhas de controle, uma primária cuja referência é a posição do distribuidor ou válvula de admissão de fluxo que controla o torque da máquina. A saída desta malha atua diretamente sobre a válvula proporcional ou atuador mecânico do distribuidor ou válvula de admissão de fluxo e consequentemente sobre o torque da máquina. A malha secundária tem como referência a velocidade ou frequência e a saída atua diretamente sobre a referência da malha primária. A malha terciária tem como referência a potência ativa gerada e a saída atua sobre a malha secundária. A quarta malha de controle é utilizada para controlar o ângulo de
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 77 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.1.6.2: Curva escorvamento automático

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
ataque das pás do rotor da turbina Kaplan, tem como referência a posição do distribuidor e a saída atua sobre a válvula proporcional ou atuador mecânico do giro das pás.
4.2.1.1 - MALHA PRIMÁRIA (POSIÇÃO DISTRIBUIDOR)
A variável controlada é a posição do distribuidor. O regulador irá atuar sobre o atuador mecânico de modo a manter a posição do distribuidor constante e igual ao valor ajustado na referência. A figura abaixo mostra esta malha de controle:
A referência de posição passa por um bloco de linearização.
Possui na saída do controlador PI um bloco de compensação de área de pistão e folga ou zona morta na válvula proporcional.
4.2.1.1.1 - COMPENSAÇÃO DE ÁREA DE PISTÃO
Faz a compensação da diferença de área do cilindro hidráulico para abertura e fechamento do distribuidor.
A maioria dos cilindros hidráulicos utilizados para acionamento do distribuidor da turbina possuem uma área de secção diferente para abertura e fechamento, conforme pode-se verificar pela figura abaixo:
Durante a subida do pistão a área útil da secção do pistão corresponde a área total da secção. Durante a descida a área útil é menor e corresponde a área total da secção do pistão menos a área da
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 78 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.2.1.1.1.1: Secção do cilindro hidráulico
Figura 4.2.1.1.1: Malha de controle de posição do distribuidor

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
haste.
Desta forma o pistão da figura apresentará velocidades diferentes de subida e descida para uma mesma vazão de óleo adentrando o cilindro.
4.2.1.1.2 - COMPENSAÇÃO DE ZONA MORTA
Compensa a zona morta que existe nas válvulas proporcionais hidráulicas em torno da posição central que não produz movimento no cilindro.
4.2.1.2 - MALHA SECUNDÁRIA (VELOCIDADE)
Neste modo de controle a referência do regulador passa a ser a velocidade da máquina. Esta velocidade pode ser obtida a partir do sinal do sensor de velocidade ou da frequência do gerador. A saída de controle desta malha atua sobre a referência da malha primária.
Pode operar de duas formas:
4.2.1.2.1 - MODO CONTROLE DE VELOCIDADE
Neste modo de controle o regulador irá modificar a referência da malha de controle primária de modo a manter velocidade constante e igual a referência. A figura abaixo mostra esta malha de controle:
4.2.1.2.2 - MODO CONTROLE DE VELOCIDADE COM COMPENSAÇÃO DA POTÊNCIA ATIVA (ESTATISMO)
Este modo de operação é utilizado quando o gerador for posto em paralelo com outros geradores ou com barramento infinito.
Neste modo de controle, a referência do regulador de velocidade continua sendo a velocidade, porém, ela varia de acordo com as variações da potência ativa e de um ganho proporcional “K”. Na prática, isto funciona da seguinte maneira: Estando a máquina conectada a um barramento infinito, com frequência igual a própria referência do regulador, ao variar a frequência do barramento, ocorrerá uma variação na potência ativa, pois o regulador tentará se opor a esta variação. Essa variação na potência ativa é somada a referência de velocidade, fazendo com que a mesma acompanhe a frequência do barramento. A figura abaixo mostra esta malha de controle:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 79 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.2.1.2.1.1: Malha de controle de velocidade

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.2.1.3 - MALHA TERCIÁRIA (POTÊNCIA ATIVA)
Neste modo de controle a referência do regulador é a potência ativa. A saída de controle desta malha atua sobre a referência da malha secundária. a figura abaixo mostra esta malha de controle:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 80 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL Figura 4.2.1.2.2.1: Malha de controle de velocidade com compensação de potência ativa

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.2.1.4 - MALHA CONTROLE DO ANGULO DE ATAQUE DAS PÁS DO ROTOR
Esta malha efetua o controle da posição das pás do rotor, visando obter um melhor rendimento da turbina.
A referência de posição das pás é função da referência de posição do distribuidor. Esta função é obtida a partir de uma tabela de interpolação linear com 10 pontos, relacionando a posição do distribuidor com a posição do rotor equivalente.
A figura abaixo mostra esta malha de controle:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 81 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.2.1.3.1: Malha de controle de potência ativa

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.2.2 - COMUTAÇÃO SUAVE ENTRE MODOS DE OPERAÇÃO
Ao comutar entre modos de controle o regulador pode atuar de duas formas: Mantendo o mesmo ponto de operação de antes da comutação (transferência suave) ou indo para referencia inicial do novo modo de controle. A seleção desta função é feito por meio do ajuste dos parâmetros.
4.2.3 - RAMPA DE REFERÊNCIA
Todos as referências de controle possuem um limitador de taxa de variação, isso significa que ao habilitar o regulador ou modificar o valor de qualquer referência, o regulador o fará em rampa suave. A taxa de variação (inclinação da rampa) é ajustável. A figura abaixo mostra a variação da referência para uma entrada em degrau.
4.2.4 - REFERÊNCIA POR ENTRADA ANALÓGICA
Todas as referências de controle do regulador de velocidade possuem associadas uma segunda variável que atua no ponto de soma junto com a referência, esta variável é utilizada para modificar a referência do regulador por meio da entrada analógica e deve ser conectada ao bloco de entrada
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 82 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.2.3.1: Rampa de referência
Figura 4.2.1.4.1: Malha controle de posição das pás do rotor

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
analógica por meio da lógica programável. A figura abaixo ilustra como a referência analógica atua sobre a referência de controle.
4.2.5 - LIMITADORES
O regulador de velocidade possui diversos limitadores que tem pro objetivo manter a operação da máquina dentro dos seus limites de segurança. são eles:
– Limitador de referência máximo/mínimo para as referencias de posição do distribuidor, velocidade e potência ativa;
– Limitador máximo/mínimo da saída de controle das malhas primária, secundária, terciária e de controle de ângulo do rotor;
4.2.5.1 - LIMITADOR REFERÊNCIAS
Todas as referência de controle do GRTD2000 possuem limites máximos e mínimos configuráveis por meio de parâmetros de ajuste.
O objetivo principal deste limitador é restringir a operação dos comandos digitais de aumenta/diminui referência e também evitar o risco de que uma modificação de referência errada possa comprometer a operação da máquina.
4.2.5.2 - LIMITADOR SAÍDA CONTROLE
As malhas de controle primária, secundária, terciária e de posição do rotor, possuem limites máximos e mínimos configuráveis por meio de parâmetros de ajuste.
Visando evitar esforços nas tubulações de água da turbina durante o fechamento, o limite mínimo da saída de controle primário possui dois estágios. O segundo estágio é ativado sempre que a abertura do distribuidor for menor que o valor setado no parâmetro “lim_rv_ctrl_prim_pos”.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 83 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.2.4.1: Referência Analógica

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.3 - SINCRONOSCÓPIO
O GRTD2000, possui um bloco lógico que implementa a função de sincronoscópio e que permite efetuar os sincronismo da máquina com o barramento onde será conectada. Executa as seguintes operações:
– Verificação das condições de sincronismo (tensão, frequência e fase) entre máquina e rede;
– Atuação sobre referências de tensão e frequência da máquina através de pulsos digitais p/ os reguladores de tensão e velocidade;
4.3.1 - MODOS DE OPERAÇÃO
O sincronoscópio possui os seguintes modos de operação:
– Barra morta;
– Checagem das condições de sincronismo
– Sincronizador
– Sincronismo automático
4.3.1.1 - BARRA MORTA
Neste modo de operação, o sincronoscópio verifica a presença de tensão no barramento. Caso esteja abaixo do ajuste do nível de verificação, liga o estado digital de sincronizado que deve ser usado pela lógica programável para fechar ou dar condição de fechamento do disjuntor que conecta a máquina ao barramento. Caso exista tensão no barramento liga o alarme de falha de sincronismo.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 84 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.3.1.2 - CHECAGEM DAS CONDIÇÕES DE SINCRONISMO
Neste modo de sincronismo, são verificadas as condições de sincronismo (tensão, frequência e fase). Se estiverem dentro das janelas de ajuste programado, liga o estado digital sincronizado, que deve ser usado pela lógica programável para fechar ou dar condição de fechamento do disjuntor que conecta a máquina ao barramento. Neste modo não existe alarme falha de sincronismo, o sincronizador fica indefinidamente checando as condições enquanto estiver habilitado.
4.3.1.3 - SINCRONIZADOR
Neste modo, o sincronizador efetua a checagem das condições de sincronismo e caso não estejam dentro das janelas de ajuste programado, produz pulsos digitais de aumento/redução das referências de tensão e frequência. Estes pulsos devem ser conectados via lógica programável ao regulador de tensão e velocidade. Caso permaneça por muito tempo tentando sincronizar, sem sucesso, liga o alarme de falha de sincronismo. Quando as condições de sincronismo forem satisfeitas liga o estado digital sincronizado.
Existem dois modos de modulação dos pulsos:
– Largura variável;
– Frequência variável;
4.3.1.3.1 - LARGURA VARIÁVEL
Neste modo de operação os pulsos tem frequência fixa e a largura é proporcional ao erro de referência, ou seja, quanto mais afastado da janela de sincronismo, maior será a largura do pulso.
A figura abaixo ilustra o comportamento destes pulsos:
4.3.1.3.2 - FREQUÊNCIA VARIÁVEL
Neste modo de operação os pulsos tem largura fixa e a frequência é proporcional ao erro de referência, ou seja, quanto mais afastado da janela de sincronismo, maior será a frequência dos pulsos.
A figura abaixo ilustra o comportamento destes pulsos:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 85 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.3.1.3.1.1: Sincronizador: exemplo pulsos de largura variável

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.3.1.4 - SINCRONISMO AUTOMÁTICO
Neste modo o sincronizador primeiramente verifica as condições para fechamento em barra morta, se não houver tensão na barra (barra morta) liga o estado digital sincronizado. Se por outro lado houver tensão na barra atua no modo sincronizador, gerando pulsos para ajuste das referência e checando as condições de sincronismo (tensão, frequência e fase). Quando todas as condições de sincronismo forem satisfeitas liga o estado digital sincronizado. Caso permaneça por muito tempo tentando sincronizar, liga o alarme falha de sincronismo.
4.4 - DUPLO CANAL
O Regulador GRTD2000 tem capacidade de operar nas configurações de canal simples (01 regulador) e canal duplo (2 reguladores).
Quando estiver operando na configuração duplo canal, apenas um dos reguladores efetivamente controla a tensão de excitação. O outro por sua vez funciona como retaguarda, vindo a assumir o controle da excitação em caso de falha do primeiro ou de comando do operador.
Os dois canais são exatamente idênticos e a condição “principal” ou “retaguarda” é relativa, ou seja, será chamado principal aquele que possui o controle e retaguarda o que não possui o controle. Qualquer um dos canais pode assumir a condição de principal ou retaguarda.
Para que a operação em duplo canal funcione perfeitamente é necessário que os dois canais troquem informação entre si para que possam negociar o modo de operação de cada um. Esta comunicação é realizada através de uma porta de comunicação serial especifica para esta função.
Diversas topologias de montagem são possíveis, ver capitulo 1.10 “Topologias de Montagem“ e capítulo 1.12 “Conexões Elétricas“ para mais detalhes a respeito das conexões elétricas necessárias para operação em duplo canal.
4.4.1 - LOGICA DE TRANSFERÊNCIA DE CANAIS
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 86 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.3.1.3.2.1: Sincronizador: exemplo pulsos de frequência variável

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.4.1.1 - AO ENERGIZAR:
Ao energizar o regulador, estando a comunicação “duplo canal” entre eles operante, um dos canais irá assumir o modo principal. A decisão de qual será principal é aleatória e depende de dois fatores:
– Do tempo de inicialização do canal (quem inicializar primeiro será principal);
– Da prioridade de cada canal (Caso inicializem simultaneamente, será principal o que tiver maior prioridade). Se as prioridades forem iguais, a decisão de quem é principal será aleatória;
Caso ao energizar haja um problema na comunicação entre os canais, então o canal que estiver controlando a ponte será principal. Se estiver utilizando uma topologia onde cada regulador comanda a sua própria ponte, então os dois regulador iniciarão como principal. Para evitar essa situação deve utilizar uma logica de intertravamento externo para bloquear a ação de um deles.
4.4.1.2 - DURANTE OPERAÇÃO:
4.4.1.2.1 - COMUTAÇÃO POR FALHA:
Durante operação normal, haverá comutação de canal na ocorrência de qualquer falha no regulador principal que o impeça de manter a regulação.
Como exemplo destas falhas pode-se citar:
– Falha na fonte de alimentação;
– Travamento do processador 2 (aquisição analógica);
– Travamento do processador 1 (controle);
– Falha de comunicação entre processadores.
– Falha no módulo de potência;
4.4.1.2.2 - COMUTAÇÃO POR COMANDO
Durante operação normal, haverá comutação de canal quando houver um comando de escrita na variável st_dc_torna_princ do regulador retaguarda, desde que o canal retaguarda não apresente nenhuma falha listada acima e a comunicação entre os canais esteja funcionando.
O comando é realizado escrevendo-se “1” na variável st_dc_torna_princ do regulador retaguarda;
4.4.2 - SEGUIMENTO DE REFERÊNCIA
O regulador retaguarda tem a habilidade de seguir os valores de referência do regulador principal, desta forma ao haver comutação de canal, a mesma se dará de forma suave com o regulador retaguarda mantendo a máquina no mesmo ponto de operação de entes da comutação.
O seguimento de referência é opcional e pode ser configurado por meio dos parâmetros de ajuste.
Caso esteja configurado para o não seguimento, ao haver comutação o regulador retaguarda utilizará as referêcias iniciais.
4.4.3 - SINCRONIZAÇÃO DE VARIÁVEIS
O GRTD2000 tem a opção de sincronizar as variáveis de parametrização entre os reguladores ao energizar e durante a operação normal.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 87 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.4.3.1 - AO ENERGIZAR
Ao energizar o regulador retaguarda pode copiar os parâmetros de operação e lógica do regulador principal. Isso significa que após o processo de inicialização ambos terão os mesmos valores de parâmetros.
Essa operação é opcional e selecionada por meio do ajuste de parâmetros.
4.4.3.2 - DURANTE OPERAÇÃO
Durante operação normal, é possível configurar por meio de parâmetros os reguladores para que o retaguarda esteja sempre sincronizado com o principal, assim sendo, ao alterar um parâmetro no regulador principal estará alterando no regulador retaguarda também, automaticamente.
Nota: Se a sincronização de parâmetros durante operação estiver habilitada e modificar um parâmetro no regulador retaguarda, este retornará para o valor anterior de modo a manter o sincronismo com o regulador principal.
4.5 - CÓDIGO DE DESBLOQUEIO DE FUNÇÕES
O GRTD2000 possui um código que efetua o desbloqueio das funções do regulador. Este código é único e diferente para cada regulador fabricado.
Nota: Caso seja introduzido um código errado o regulador permanecerá em falha impedindo a regulação.
4.6 - ENTRADAS ANALÓGICAS
O GRTD2000 possui entradas analógicas de uso geral que podem ser utilizadas para modificação de referências de controle ou na lógica de operação.
O ajuste dos parâmetros permite limitar o valor máximo e minimo das entradas analógicas, bem como escalar o valor de modo a adequá-lo ao processo.
A figura abaixo ilustra como os parâmetros de ajuste da entrada analógica se relacionam:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 88 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.6.1: Entrada analógica

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.6.1 - EXEMPLO DE AJUSTE
Deseja-se utilizar uma entrada analógica na faixa de 0 a 5V de modo que esta variação corresponda a uma variação de +/- 0,1 PU na referência de tensão de armadura.
Neste caso deve-se ajustar o parâmetro cf_an_in_max = 0,5 PU e cf_an_in_min = 0 PU tendo em vista que em modo de tensão, 1 PU da entrada analógica equivale a 10V.
Os parâmetros de escala devem ser ajustados como: cf_an_in_max_nor = 0,1 PU e cf_an_in_min_nor = -0,1 PU.
A figura abaixo ilustra como ficaria a relação entre os parâmetros:
4.7 - SAÍDAS ANALÓGICAS
O GRTD2000 possui saídas analógicas de uso geral que podem ser utilizadas para atuar sobre o processo ou servir de para medição de variáveis internas.
O ajuste dos parâmetros permite limitar o valor máximo e minimo das saídas analógicas, bem como escalar o valor de modo a adequá-lo ao processo.
A figura abaixo ilustra como os parâmetros de ajuste da saída analógica se relacionam:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 89 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.6.1.1: Exemplo entrada analógica

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
4.7.1 - EXEMPLO DE AJUSTE
Deseja-se utilizar uma saída analógica na faixa de 4 a 20mA de modo que esta variação corresponda a uma variação de 0 a 2 PU na referência de tensão de armadura.
Neste caso deve-se ajustar o parâmetro cf_an_out_max = 1,0 PU e cf_an_out_min = 0,2 PU tendo em vista que em modo de corrente, 1 PU da saída analógica equivale a 20mA.
Os parâmetros de escala devem ser ajustados como: cf_an_out_max_nor = 2,0 PU e cf_an_out_min_nor = -2,0 PU.
A figura abaixo ilustra como ficaria a relação entre os parâmetros:
4.8 - SINCRONISMO TEMPORAL
O GRTD2000 permite sincronizar o seu relógio interno com outro relógio base através do protocolo
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 90 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.7.1: Saída analógica
Figura 4.7.1.1: Exemplo saída analógica

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
IRIG-B000.
O sinal IRIG-B000 deve ser aplicado a entrada digital correspondente após selecionar a função desta entrada através do parâmetro cf_ed_vel_irig.
A sincronização é feita variando-se a frequência do relógio interno para mais ou para menos, até que esteja sincronizado com o relógio base. Quanto mais próximo estiver o relógio interno do relógio base (menor erro), mais rápida será a sincronização. É importante também que o relógio interno esteja perfeitamente calibrado (com baixa deriva em relação ao relógio base) para que a sincronização ocorre perfeitamente.
NOTA: Apenas a hora, minuto e segundos são sincronizados automaticamente, o ajuste do dia, mês e ano deve ser feito manualmente.
4.8.1 - IRIG-B000
O sinal IRIG-B000 caracteriza-se por uma sequência de caracteres (pulsos) recebidos a uma taxa de 100 PPS (pulsos por segundo).
Existem 3 tipos de caractere: “0”, “1” e “P”. Cada caractere é identificada a partir da largura do pulso recebido. A figura abaixo ilustra os três tipos de pulso contidos num frame IRIG-B000.
A tabela abaixo ilustra um frame IRIG-B completo. O GRTD2000 utiliza apenas as informações contidas nos bits de 0 a 28.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 91 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
Figura 4.8.1.1: Tipos de pulso IRIG-B

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Bit Tempo Conteúdo Descrição
0 Pr reference bit (Pr)
12345678
Pr + 10msPr + 20msPr + 30msPr + 40msPr + 50msPr + 60msPr + 70msPr + 80ms
seconds 1seconds 2seconds 4seconds 8
index bit (0)seconds 10seconds 20seconds 40
segundos (0 … 59)
9 Pr + 90ms position identifier 1 (P1)
101112131415161718
Pr + 100msPr + 110msPr + 120msPr + 130msPr + 140msPr + 150msPr + 160msPr + 170msPr + 180ms
minutes 1minutes 2minutes 4minutes 8
index bit (0)minutes 10minutes 20minutes 40index bit (0)
minutos (0 … 59)
19 Pr + 190ms position identifier 2 (P2)
202122232425262728
Pr + 200msPr + 210msPr + 220msPr + 230msPr + 240msPr + 250msPr + 260msPr + 270msPr + 280ms
hours 1hours 2hours 4hours 8
index bit (0)hours 10hours 20
index bit (0)index bit (0)
horas (0 … 23)
29 Pr + 290ms position identifier 3 (P3)
303132333435363738
Pr + 300msPr + 310msPr + 320msPr + 330msPr + 340msPr + 350msPr + 360msPr + 370msPr + 380ms
days 1days 2days 4days 8
days 10days 20days 40days 80
dias do ano (1 … 365 ou 366)
39 Pr + 390ms position identifier 4 (P4)
404142434445464748
Pr + 400msPr + 410msPr + 420msPr + 430msPr + 440msPr + 450msPr + 460msPr + 470msPr + 480ms
days 100days 200
index bit (0)index bit (0)index bit (0)index bit (0)index bit (0)index bit (0)index bit (0)
dias do ano (1 … 365 ou 366), continuação
49 Pr + 490ms position identifier 5 (P5)
505152535455565758
Pr + 500msPr + 510msPr + 520msPr + 530msPr + 540msPr + 550msPr + 560msPr + 570msPr + 580ms
control function bit 1control function bit 2control function bit 3control function bit 4control function bit 5control function bit 6control function bit 7control function bit 8control function bit 9
funções especiais
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 92 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Bit Tempo Conteúdo Descrição
59 Pr + 590ms position identifier 6 (P6)
606162636465666768
Pr + 600msPr + 610msPr + 620msPr + 630msPr + 640msPr + 650msPr + 660msPr + 670msPr + 680ms
control function bit 10control function bit 11control function bit 12control function bit 13control function bit 14control function bit 15control function bit 16control function bit 17control function bit 18
funções especiais
69 Pr + 690ms position identifier 7 (P7)
707172737475767778
Pr + 700msPr + 710msPr + 720msPr + 730msPr + 740msPr + 750msPr + 760msPr + 770msPr + 780ms
control function bit 19control function bit 20control function bit 21control function bit 22control function bit 23control function bit 24control function bit 25control function bit 26control function bit 27
funções especiais
79 Pr + 790ms position identifier 8 (P8)
808182838485868788
Pr + 800msPr + 810msPr + 820msPr + 830msPr + 840msPr + 850msPr + 860msPr + 870msPr + 880ms
time-of-day 1time-of-day 2time-of-day 4time-of-day 8time-of-day 16time-of-day 32time-of-day 64time-of-day 128time-of-day 256
segundos do ano (0 … 86399 ou 86400)
89 Pr + 890ms position identifier 9 (P9)
909192939495969798
Pr + 900msPr + 910msPr + 920msPr + 930msPr + 940msPr + 950msPr + 960msPr + 970msPr + 980ms
time-of-day 512time-of-day 1024time-of-day 2048time-of-day 4096time-of-day 8192time-of-day 16384time-of-day 32768time-of-day 65536
index bit (0)
segundos do ano (0 … 86399 ou 86400), continuação
99 Pr + 990ms position identifier 0 (P0)
Tabela 4.8.1.1: Conteúdo do frame IRIG-B
4.9 - OSCILOGRAFIAS
A oscilografia consiste no armazenamento em memória não volátil (cartão SD) dos valores de sinais de medição analógico adquiridos a uma taxa de amostragem constante, durante um determinado período de tempo.
O regulador de tensão está constantemente adquirindo e armazenando em memória volátil os canais ajustados. Quando ocorre um evento de disparo da oscilografia (trigger) o regulador continua adquirindo os canais até atingir o numero de pontos pós-falta programados, quando então efetua a
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 93 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
gravação de todos os pontos em memória não volátil.
Todos os canais da oscilografia são gravado num arquivo do tipo texto, cujo nome segue uma numeração sequencial, onde o último numero representa o arquivo mais atual.
Os arquivos estão localizados dentro de uma pasta chamada “OSC” no cartão de memória. O número máximo de arquivos de oscilografia contidos dentro da pasta é definido pelo parâmetro os_max_file. Depois que atingir o limite de arquivos ou quando o espaço no disco for insuficiente, apaga automaticamente o arquivo mais antigo de modo a liberar espaço.
Limitar o número máximo de arquivos é importante para evitar a criação de um conjunto de arquivos muito pesado que acabe exigindo um maior esforço computacional para manipulação, e consequentemente aumentando o tempo de acesso para leitura.
O valor padrão para este parâmetro é:
os_max_file = 10
O cartão de memória jamais deve ser removido com o regulador ligado. Caso seja necessário remove-lo com o regulador ligado, deve-se efetuar comando ao regulador para interromper a gravação de novos registros (st_re_stop_sd = 1).
4.9.1 - ESTRUTURA DOS ARQUIVOS DE OSCILOGRAFIA.
O arquivo de oscilografia possui a seguinte estrutura:
AA MM DD HH mm SS sss 111111 222222 333333 444444 555555 666666 777777 888888 aaaaaa bbbbbb cccccc dddddd eeeeee ffffff gggggg hhhhhh aaaaaa bbbbbb cccccc dddddd eeeeee ffffff gggggg hhhhhh aaaaaa bbbbbb cccccc dddddd eeeeee ffffff gggggg hhhhhh aaaaaa bbbbbb cccccc dddddd eeeeee ffffff gggggg hhhhhh aaaaaa bbbbbb cccccc dddddd eeeeee ffffff gggggg hhhhhh aaaaaa bbbbbb cccccc dddddd eeeeee ffffff gggggg hhhhhh aaaaaa bbbbbb cccccc dddddd eeeeee ffffff gggggg hhhhhh aaaaaa bbbbbb cccccc dddddd eeeeee ffffff gggggg hhhhhh
Na primeira linha do arquivo tem-se a data e hora do último ponto armazenado no arquivo, onde:
AA – Ano em que o último ponto do arquivo foi gravado;
MM – Mês em que o último ponto do arquivo foi gravado;
DD – Dia do mês em que o último ponto do arquivo foi gravado;
HH – Hora em que o último ponto do arquivo foi gravado;
mm – Minuto em que o último ponto do arquivo foi gravado;
SS – Segundo em que o último ponto do arquivo foi gravado;
sss – Milésimo de segundo em que o último ponto do arquivo foi gravado;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 94 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Na segunda linha tem-se os endereços das variáveis gravadas em cada canal, cada coluna representa um canal de oscilografia, podendo variar de 1 a 8. Onde:
111111 - Endereço modbus da variável adquirida pelo canal 1;
222222 - Endereço modbus da variável adquirida pelo canal 2;
333333 - Endereço modbus da variável adquirida pelo canal 3;
444444 - Endereço modbus da variável adquirida pelo canal 4;
555555 - Endereço modbus da variável adquirida pelo canal 5;
666666 - Endereço modbus da variável adquirida pelo canal 6;
777777 - Endereço modbus da variável adquirida pelo canal 7;
888888 - Endereço modbus da variável adquirida pelo canal 8;
Nas linhas seguintes tem-se os valores adquiridos das variáveis, cada linha representa o valor das variáveis medidas num período de amostragem. O tempo transcorrido entre o valor indicado entre uma linha e a subsequente, é dado pelo período de amostragem da oscilografia. O numero de linhas do arquivo varia de acordo com o numero total de pontos ajustado, do numero de canais ativos e do tempo transcorrido entre disparos consecutivos, ou seja, se entre um disparo e outro transcorrer um tempo insuficiente para encher o buffer pré-falta da oscilografia, o número de linhas do arquivo será menor do que deveria.
Onde:
aaaaaa - valor da variável adquirida pelo canal 1;
bbbbbb - valor da variável adquirida pelo canal 2;
cccccc - valor da variável adquirida pelo canal 3;
dddddd - valor da variável adquirida pelo canal 4;
eeeeee - valor da variável adquirida pelo canal 5;
ffffff - valor da variável adquirida pelo canal 6;
gggggg - valor da variável adquirida pelo canal 7;
hhhhhh - valor da variável adquirida pelo canal 8;
4.9.2 - ACESSO AOS REGISTROS DE OSCILOGRAFIA
É possível acessar o registro de oscilografias de duas formas:
– Através de protocolo “ftp” acessando diretamente o arquivo na memoria não volátil do regulador (ver capítulo 5 - Comunicação serial);
– Removendo-se o cartão de memória e efetuando a leitura através de um leitor comum de cartões SD.
4.9.3 - PARÂMETROS DE CONFIGURAÇÃO
Para mais detalhes, ver Tabela 6.3.6: Parâmetros: Oscilografia.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 95 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
os_n_canais: Define o numero de canais que serão adquiridos simultaneamente;
os_total_pts: Representa a quantidade total de pontos de todos os canais somados, ou seja, se por exemplo “os_n_canais = 8” e “os_total_pts = 8000” significa que cada canal terá um numero total de pontos igual a 1000. Se em outro exemplo, o “os_n_canais = 1” e “os_total_pts = 8000”, então o numero total de pontos do canal será 8000. OBS.: Uma observação importante é que este parâmetro deve ser múltiplo do numero de canais, caso tente escrever um numero não múltiplo do número de canais, o regulador arredondará o valor para o múltiplo inferior mais próximo;
os_pos_pts: Indica o numero de pontos que ainda serão armazenados no registro de oscilografia após o disparo (trigger). É a soma dos pontos pos-falta de todos os canais ativos. Deve ser um múltiplo do numero de canais;
os_var1: Endereço modbus da variável que será adquirida pelo canal 01. Ver tabelas de endereços da comunicação serial, no capítulo 6: Mapa de memória;
os_var2: Endereço modbus da variável que será adquirida pelo canal 02. Ver tabelas de endereços da comunicação serial, no capítulo 6: Mapa de memória;
os_var3: Endereço modbus da variável que será adquirida pelo canal 03. Ver tabelas de endereços da comunicação serial, no capítulo 6: Mapa de memória;
os_var4: Endereço modbus da variável que será adquirida pelo canal 04. Ver tabelas de endereços da comunicação serial, no capítulo 6: Mapa de memória;
os_var5: Endereço modbus da variável que será adquirida pelo canal 05. Ver tabelas de endereços da comunicação serial, no capítulo 6: Mapa de memória;
os_var6: Endereço modbus da variável que será adquirida pelo canal 06. Ver tabelas de endereços da comunicação serial, no capítulo 6: Mapa de memória;
os_var7: Endereço modbus da variável que será adquirida pelo canal 07. Ver tabelas de endereços da comunicação serial, no capítulo 6: Mapa de memória;
os_var8: Endereço modbus da variável que será adquirida pelo canal 08. Ver tabelas de endereços da comunicação serial, no capítulo 6: Mapa de memória;
4.9.4 - CARACTERÍSTICAS TÉCNICAS:
– Período Aquisição: 10ms;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 96 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
– Numero máximo de canais simultâneos: 8;
– Numero máximo de pontos (soma de todos os canais): 10000;
4.10 - REGISTRO DE EVENTOS
O registro de eventos consiste na gravação em memória não volátil dos eventos do tipo digital (booleano).
Para que o registro de eventos funcione é necessário que haja um cartão de memória do tipo SD inserido no slot correspondente.
A gravação é feita em arquivos do tipo texto que estão localizados dentro de uma pasta chamada “EVT” no cartão de memória.
Os arquivos possuem uma numeração sequencial, onde o último numero da sequencia representa o arquivo mais atual.
Cada novo registro é adicionado ao arquivo mais atual até que este atinja o limite máximo de registros por arquivo, definido pelo parâmetro re_max_reg (ver Tabela 6.3.5: Parâmetros: Registro deEventos), quando isso acorrer, será criado um novo arquivo. O número máximo de arquivos criados será definido pelo parâmetro re_max_file. Depois que atingir o limite de arquivos ou quando o espaço no disco for insuficiente, apaga automaticamente o arquivo mais antigo de modo a liberar espaço.
Limitar o número máximo de arquivos e de registros por arquivo é importante para evitar a criação de um conjunto de arquivos muito pesado que acabe exigindo um maior esforço computacional para manipulação, e consequentemente aumentando o tempo de acesso para leitura.
Os valores padrão para estes parâmetros são:
re_max_reg = 10000
re_max_file = 10
Isso permite ter arquivado os últimos 100.000 registros.
O cartão de memória jamais deve ser removido com o regulador ligado. Caso seja necessário removê-lo com o regulador ligado, deve-se efetuar comando ao regulador para interromper a gravação de novos registros (st_re_stop_sd = 1). Quando isso ocorrer os novos eventos serão armazenados em memória não volátil interna, mantida pela bateria do relógio, com capacidade para até 255 registros. Caso ultrapasse este número , haverá perda dos registros mais antigos.
O arquivo gerado é do tipo texto com a seguinte estrutura:
07 07 16 18 46 44 295 33 007 07 16 18 46 44 896 78 007 07 16 18 53 32 356 0 107 07 16 18 54 26 135 33 107 07 16 18 54 29 039 78 1
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 97 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
07 07 16 18 54 33 542 0 007 07 16 18 54 35 544 33 007 07 16 18 54 37 245 78 007 07 16 18 54 59 159 0 107 07 16 18 55 05 964 33 1
Onde cada linha representa um evento e tem o seguinte formato:
AA MM DD HH mm SS sss EEEE T | | | | | | | | | | | | | | | | | - Tipo do Evento: 0=Desl., 1=Liga | | | | | | | ---- Numero do Evento | | | | | | --------- Milésimo de segundo | | | | | ------------ Segundo | | | | --------------- Minuto | | | ------------------ Hora | | --------------------- Dia | ------------------------ Mes --------------------------- Ano
A dimensão total da linha é de 28 caracteres.
Os campos de tempo indicam o momento em que o evento ocorreu.
4.10.1 - ACESSO AOS REGISTROS
É possível acessar o registro de oscilografias de duas formas:
– Através de protocolo “ftp” acessando diretamente o arquivo na memoria não volátil do regulador (ver capítulo 5 - Comunicação serial);
– Removendo-se o cartão de memória e efetuando a leitura através de um leitor comum de cartões SD.
4.10.2 - LISTA DE EVENTOS
Na tabela abaixo são listados todos os eventos do regulador com seus respectivos números e variáveis de onde foram dos.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 98 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
0 st_rt_escorv_out st_ro_g1
1 st_pt_outro_ativo
2 st_par_difer
3 st_mc_stop
4 st_pt_meu_ativo
5 st_os_fim
6 st_si_sincr
7 st_si_varm_ok
8 st_si_freq_ok
9 st_si_fase_ok
10 st_si_f_up
11 st_si_f_dw
12 st_si_v_up
13 st_si_v_dw
14 st_log_difer
15 st_pt_falha
16 st_ro_g2
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32 st_lim_iexc_lsup st_lim_sup
33 st_lim_iarm_lsup
34 st_lim_ref_man_sup
35 st_lim_ref_uarm_sup
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 99 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
36 st_lim_ref_fp_sup
37 st_lim_ref_q_sup
38 st_lim_ctrl_sec_max
39 st_lim_ctrl_prim_max
40
41
42
43
44
45
46
47
48 st_lim_iexc_linf st_lim_inf
49 st_lim_iarm_linf
50 st_lim_pq
51 st_lim_ref_man_inf
52 st_lim_ref_uarm_inf
53 st_lim_ref_fp_inf
54 st_lim_ref_q_inf
55 st_lim_ctrl_sec_min
56 st_lim_ctrl_prim_min
57
58
59
60
61
62
63
64 st_lim_vhz st_lim_g1
65 st_lim_iarm_out_max
66 st_lim_iarm_out_min
67
68
69
70
71
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 100 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
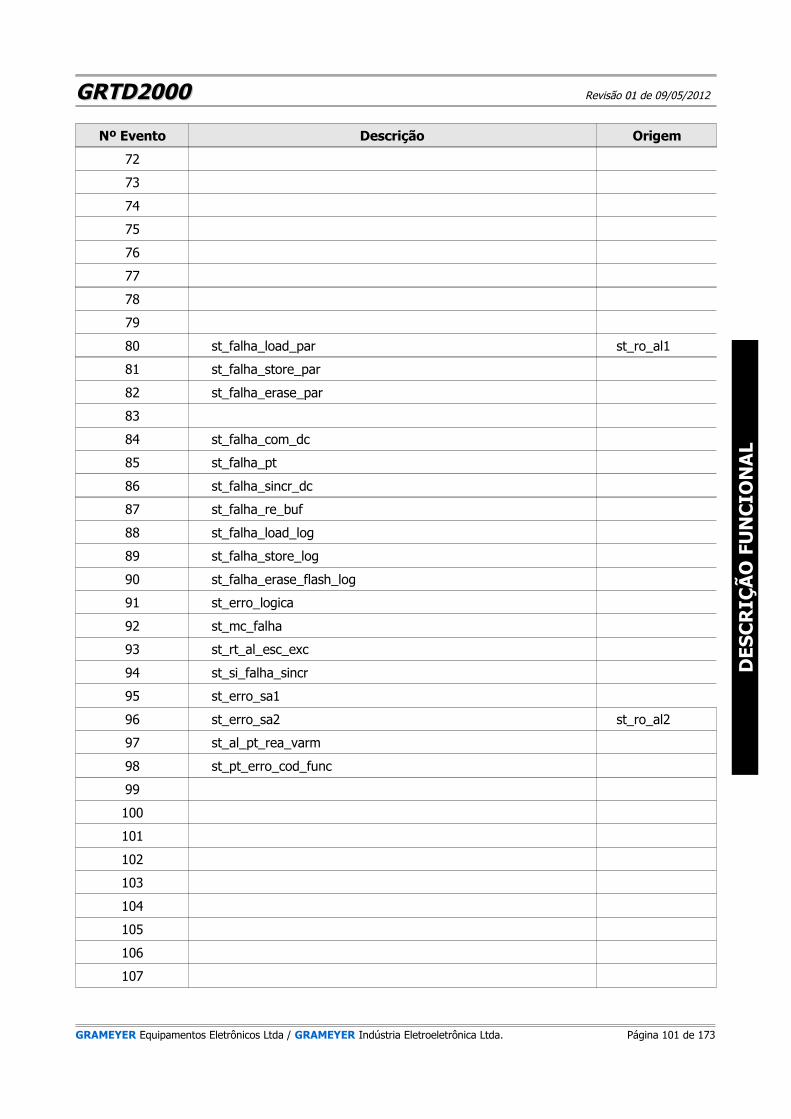
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
72
73
74
75
76
77
78
79
80 st_falha_load_par st_ro_al1
81 st_falha_store_par
82 st_falha_erase_par
83
84 st_falha_com_dc
85 st_falha_pt
86 st_falha_sincr_dc
87 st_falha_re_buf
88 st_falha_load_log
89 st_falha_store_log
90 st_falha_erase_flash_log
91 st_erro_logica
92 st_mc_falha
93 st_rt_al_esc_exc
94 st_si_falha_sincr
95 st_erro_sa1
96 st_erro_sa2 st_ro_al2
97 st_al_pt_rea_varm
98 st_pt_erro_cod_func
99
100
101
102
103
104
105
106
107
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 101 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
108
109
110
111
112 st_ed1_1 st_ro_ed1
113 st_ed1_2
114 st_ed1_3
115 st_ed1_4
116 st_ed1_5
117 st_ed1_6
118 st_ed1_7
119 st_ed1_8
120 st_ed1_9
121 st_ed1_10
122 st_ed1_11
123 st_ed1_12
124 st_ed1_13
125 st_ed1_14
126 st_ed1_15
127 st_ed1_16
128 st_falha_com_dsp st_ro_pt1
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 102 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
144 st_save_par st_rw_1
145 st_reload_par
146 st_stop_logic
147 st_rt_enable
148 st_rt_ctrl_sec
149 st_rt_ed_up
150 st_rt_ed_dw
151 st_rt_modo_man
152 st_dc_torna_princ
153 st_re_stop_sd
154 st_si_en
155 st_rt_reset_ref
156 st_rt_comp_q
157 st_os_trig
158
159
160 st_rw_2
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176 st_sd1_1 st_rw_sd1
177 st_sd1_2
178 st_sd1_3
179 st_sd1_4
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 103 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL
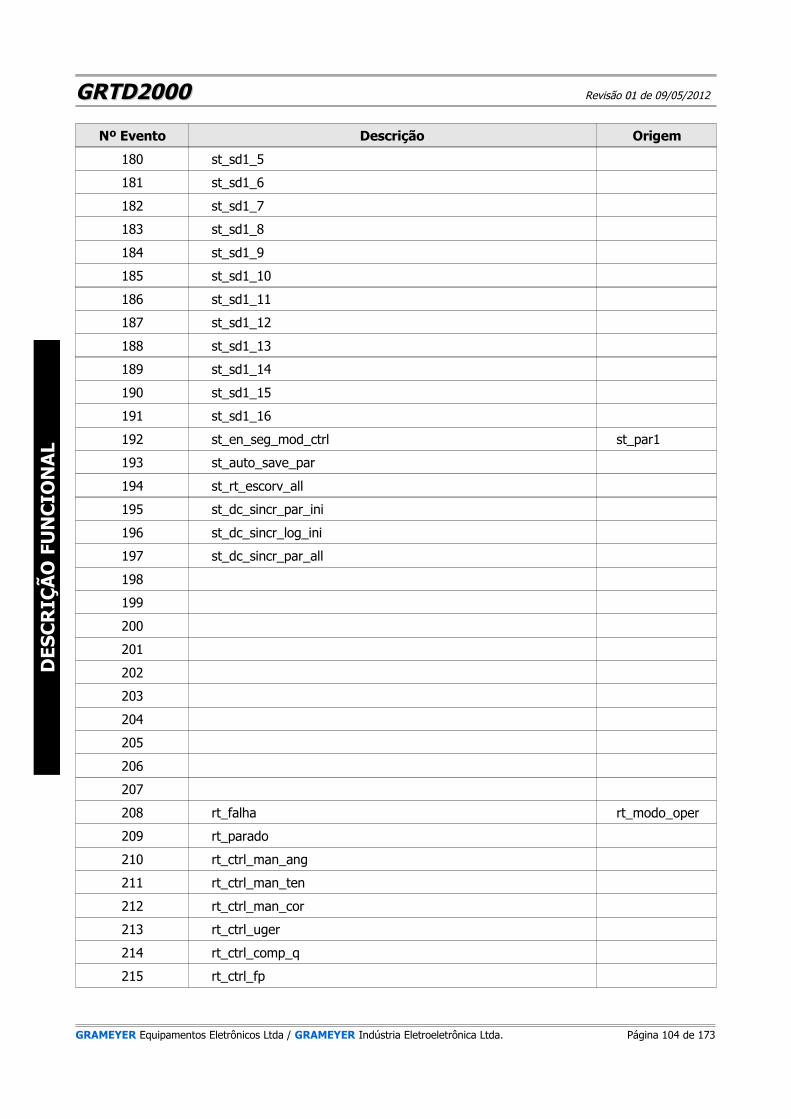
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
180 st_sd1_5
181 st_sd1_6
182 st_sd1_7
183 st_sd1_8
184 st_sd1_9
185 st_sd1_10
186 st_sd1_11
187 st_sd1_12
188 st_sd1_13
189 st_sd1_14
190 st_sd1_15
191 st_sd1_16
192 st_en_seg_mod_ctrl st_par1
193 st_auto_save_par
194 st_rt_escorv_all
195 st_dc_sincr_par_ini
196 st_dc_sincr_log_ini
197 st_dc_sincr_par_all
198
199
200
201
202
203
204
205
206
207
208 rt_falha rt_modo_oper
209 rt_parado
210 rt_ctrl_man_ang
211 rt_ctrl_man_ten
212 rt_ctrl_man_cor
213 rt_ctrl_uger
214 rt_ctrl_comp_q
215 rt_ctrl_fp
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 104 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
216 rt_ctrl_q
217
218
219
220
221
222
223
224 este_principal dc_modo_meu
225 este_retaguarda
226 este_quase_princ
227 este_inicializacao
228 este_sincronizacao
229 este_falha
230 este_desconhecido
231
232
233
234
235
236
237
238
239
240 outro_principal dc_modo_outro
241 outro_retaguarda
242 outro_quase_princ
243 outro_inicializacao
244 outro_sincronizacao
245 outro_falha
246 outro_desconhecido
247
248
249
250
251
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 105 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 106 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 107 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 108 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 109 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 110 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Nº Evento Descrição Origem
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
Tabela 4.10.2.1: Lista de eventos
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 111 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 112 de 173
DES
CR
IÇÃ
O F
UN
CIO
NA
LD
ESC
RIÇ
ÃO
FU
NC
ION
AL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
5 - COMUNICAÇÃO SERIAL
O GRTD2000 possui varias portas de comunicação que permitem o acesso aos parâmetros de configuração e demais variáveis de status e medição.
5.1 - REPRESENTAÇÃO EM PONTO FIXO.
O GRTD2000 utiliza por padrão variáveis de 16bits do tipo inteiro, onde o valor de 8191 inteiro equivale a 1 PU para a maioria das variáveis. Para as variáveis que medem ângulo o valor de 65535 equivale a 360º.
5.2 - VALORES DE BASE
Para converter uma variável com representação em PU ponto fixo em valores reais, é necessário multiplicá-la pelas suas bases correspondentes.
Na sequências serão apresentadas todas as bases utilizadas no GRTD2000 e a formula utilizada para conversão em valores reais.
5.2.1 - TENSÃO DE ARMADURA - VARM
As variáveis que possuem bases na tensão de armadura podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=Vpfixo⋅bs_varm_pri⋅cf_rea_varm_niv8192⋅bs_varm_sec
Onde:
Vreal = Valor real da variável (Unid. = V)
Vpfixo = Valor em ponto fixo da variável
bs_varm_pri = Tensão de armadura base do lado primário do transformador
bs_varm_sec = Tensão de armadura base do lado secundário do transformador
cf_rea_varm_niv = Nível da realimentação da tensão de armadura (120V, 240V, 480V ou 600V)
5.2.2 - CORRENTE DE ARMADURA - IARM
As variáveis que possuem bases na corrente de armadura podem ser convertidas em valores reais utilizando-se a seguinte formula:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 113 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Vreal=Vpfixo⋅bs_iarm_pri⋅cf_rea_iarm_niv8192⋅bs_iarm_sec
Onde:
Vreal = Valor real da variável (Unid. = A)
Vpfixo = Valor em ponto fixo da variável
bs_iarm_pri = Corrente de armadura base do lado primário do transformador
bs_iarm_sec = Corrente de armadura base do lado secundario do transformador
cf_rea_iarm_niv = Nível da realimentação da corrente de armadura (1A ou 5A)
5.2.3 - POTÊNCIA DE ARMADURA - POT
As variáveis que possuem bases na potência de armadura podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=Vpfixo⋅bs_varm_pri⋅bs_iarm_prim⋅cf_rea_varm_niv⋅cf_rea_iarm_niv⋅√38192⋅bs_varm_sec⋅bs_iarm_sec
Onde:
Vreal = Valor real da variável (Unid. = W, VA ou VAr)
Vpfixo = Valor em ponto fixo da variável
bs_varm_pri = Tensão de armadura base do lado primário do transformador
bs_varm_sec = Tensão de armadura base do lado secundário do transformador
cf_rea_varm_niv = Nível da realimentação da tensão de armadura (120V, 240V, 480V ou 600V)
bs_iarm_pri = Corrente de armadura base do lado primário do transformador
bs_iarm_sec = Corrente de armadura base do lado secundario do transformador
cf_rea_iarm_niv = Nível da realimentação da corrente de armadura (1A ou 5A)
5.2.4 - TENSÃO DE CAMPO - VFLD
As variáveis que possuem bases na tensão de campo podem ser convertidas em valores reais utilizando-se a seguinte formula:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 114 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Vreal=Vpfixo⋅bs_vfld_pri⋅cf_rea_vfld_niv8192⋅bs_vfld_sec
Onde:
Vreal = Valor real da variável (Unid. = V)
Vpfixo = Valor em ponto fixo da variável
bs_vfld_pri = Tensão de campo base do lado primário do transformador
bs_vfld_sec = Tensão de campo base do lado secundario do transformador
cf_rea_vfld_niv = Nível da realimentação da tensão de campo (80V, 240V ou 720V)
5.2.5 - CORRENTE DE CAMPO - IFLD
As variáveis que possuem bases na corrente de campo podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=Vpfixo⋅bs_ifld_pri⋅102408192⋅bs_ifld_sec
Onde:
Vreal = Valor real da variável (Unid. = A)
Vpfixo = Valor em ponto fixo da variável
bs_ifld_pri = Corrente de campo base do lado primário do transformador
bs_ifld_sec = Tensão base do lado secundario do transformador de corrente de campo
5.2.6 - ROTAÇÕES POR MINUTO - RPM
As variáveis que possuem bases no RPM podem ser convertidas em valores reais utilizando-se a seguinte formula:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 115 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Vreal=Vpfixo⋅cf_vel_rpmn8192
Onde:
Vreal = Valor real da variável (Unid. = RPM)
Vpfixo = Valor em ponto fixo da variável
cf_vel_rpmn = Rotações por minuto nominal da máquina
5.2.7 - Q0
As variáveis que possuem bases do tipo Q0 podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=Vpfixo
Onde:
Vreal = Valor real da variável
Vpfixo = Valor em ponto fixo da variável
5.2.8 - Q10
As variáveis que possuem bases do tipo Q10 podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=Vpfixo1024
Onde:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 116 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Vreal = Valor real da variável
Vpfixo = Valor em ponto fixo da variável
5.2.9 - Q13
As variáveis que possuem bases do tipo Q13 podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=Vpfixo8192
Onde:
Vreal = Valor real da variável
Vpfixo = Valor em ponto fixo da variável
5.2.10 - PERCENTUAL - Q13_P
As variáveis que possuem bases do tipo Q13_P podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=Vpfixo⋅1008192
Onde:
Vreal = Valor real da variável (Unid. = %)
Vpfixo = Valor em ponto fixo da variável
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 117 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
5.2.11 - Q0_S
As variáveis que possuem bases do tipo Q0_S podem ser convertidas em valores reais de segundos utilizando-se a seguinte formula:
Vreal=Vpfixo1000
Onde:
Vreal = Valor real da variável (Unid. = s)
Vpfixo = Valor em ponto fixo da variável
5.2.12 - FREQUÊNCIA - FREQ
As variáveis que possuem bases do tipo frequência podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=Vpfixo⋅608192
Onde:
Vreal = Valor real da variável (Unid. = Hz)
Vpfixo = Valor em ponto fixo da variável
5.2.13 - ANGULO - ANG
As variáveis que possuem bases do tipo ângulo podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=Vpfixo⋅36065536
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 118 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Onde:
Vreal = Valor real da variável (Unid. = º)
Vpfixo = Valor em ponto fixo da variável
5.2.14 - FATOR DE POTÊNCIA - FP
As variáveis que possuem bases do tipo FP podem ser convertidas em valores reais utilizando-se a seguinte formula:
Vreal=−Vpfixo8192
+1
Se Vpfixo >= 0;
Ou
Vreal=−Vpfixo8192
−1
Se Vpfixo < 0;
Onde:
Vreal = Valor real da variável
Vpfixo = Valor em ponto fixo da variável
5.2.15 - VOLTZ/HERTZ - VHZ
As variáveis que possuem bases na relação voltz/hertz podem ser convertidas em valores reais utilizando-se a seguinte formula:
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 119 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Vreal=Vpfixo⋅bs_varm_pri⋅cf_rea_varm_niv60⋅8192⋅bs_varm_sec
Onde:
Vreal = Valor real da variável (Unid. = V/Hz)
Vpfixo = Valor em ponto fixo da variável
bs_varm_pri = Tensão de armadura base do lado primário do transformador
bs_varm_sec = Tensão de armadura base do lado secundário do transformador
cf_rea_varm_niv = Nível da realimentação da tensão de armadura (120V, 240V, 480V ou 600V)
5.3 - PORTAS DE COMUNICAÇÃO
O regulador de tensão possui diversas portas de comunicação serial. São elas:
5.3.1 - COM 1 – COMUNICAÇÃO MODBUS SLAVE
Porta serial RS232 ou RS485 (configurada através de chave de seleção). Utiliza para comunicação o protocolo Modbus RTU com as seguintes características:
– Velocidade: ajustável (4800, 9600, 19200, 38400 e 115200);
– Paridade: Não;
– Startbits: 1;
– Stopbits: 1;
– Modo: Escravo;
– Endereço: ajustável (1 a 247)
5.3.2 - COM 2 – COMUNICAÇÃO MODBUS MASTER
Porta serial RS485. Utiliza para comunicação o protocolo Modbus RTU com as seguintes características:
– Velocidade: ajustável (4800, 9600, 19200, 38400 e 115200);
– Paridade: Não;
– Startbits: 1;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 120 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
– Stopbits: 1;
– Modo: Escravo;
– Endereço: ajustável (1 a 247)
5.3.3 - RJ-45-ETHERNET – COMUNICAÇÃO GERAL
Porta serial padrão Ethernet localizada no módulo de controle do regulador. É utilizada para comunicação geral.
A comunicação com esta porta pode ser realizada através do seguinte protocolo:
Modbus TCP
Este protocolo, pode ser acessado através da porta 502, e permite a conexão de até 4 clientes.
Deve ser utilizado preferencialmente para ajuste e leitura dos parâmetros configuráveis do regulador.
FTP
Este protocolo permite acessar os arquivos armazenados no cartão de memória.
5.4 - CONFIGURAÇÃO DAS PORTAS DE COMUNICAÇÃO COM1 E COM2
O GRTD2000 permite configurar alguns parâmetros das portas de comunicação COM1 e COM2.
Estas configurações só terão efeito na próxima vez que o regulador for energizado.
5.4.1 - RS232/RS485
A porta de comunicação COM1 possui a possibilidade de operar pelo padrão RS232 ou RS485. Isso é feito através de uma chave seletora próximo aos conectores. Para mais detalhes, ver capitulo 3.2 “Chaves de Configuração“.
5.4.2 - VELOCIDADE DE COMUNICAÇÃO
COM1 e COM2 permitem modificar a velocidade de comunicação, isso pode ser feito por meio de ajuste de parâmetros (ver Tabela 6.3.1: Parâmetros: Configuração). A modificação da velocidade só terá efeito na próxima vez que o regulador for energizado.
Existe uma chave de configuração que permite selecionar uma velocidade padrão para as portas de comunicação (ver capitulo 3.2 “Chaves de Configuração“), independente do valor do parâmetro de velocidade ajustado. Isso é útil durante o comissionamento ou na primeira utilização, quando se desconhece o valor de velocidade ajustado.
5.4.3 - ENDEREÇO DO EQUIPAMENTO NA REDE MODBUS
COM1 e COM2 permitem modificar o endereço do dispositivo na rede, isso pode ser feito por meio de ajuste de parâmetros (ver Tabela 6.3.1: Parâmetros: Configuração). A modificação do endereço só terá efeito na próxima vez que o regulador for energizado.
Caso não se conheça qual o endereço atribuído a cada porta, pode-se edita-lo simplesmente enviando uma mensagem de escrita do tipo broadcast (p/ endereço zero na rede). Deve-se tomar cuidado no entanto para que exista somente um equipamento na rede, senão todos terão seu parâmetro alterado.
Existe uma chave de configuração que permite selecionar um endereço de rede padrão para as portas de comunicação (ver capitulo 3.2 “Chaves de Configuração“), independente do valor do parâmetro de endereço de rede ajustado. Isso é útil durante o comissionamento ou na primeira utilização, quando se desconhece o valor do endereço ajustado.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 121 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
5.5 - CONFIGURAÇÃO DA PORTA ETHERNET
A porta Ethernet permite configurar o endereço na rede por meio de ajuste de parâmetros (ver Tabela6.3.1: Parâmetros: Configuração).
Existe também uma chave de configuração que permite selecionar IP padrão para a porta Ethernet (ver capitulo 3.2 “Chaves de Configuração“)
5.6 - ENDEREÇAMENTO DOS BITS
Todas as variáveis Modbus, até o endereço 4095, permitem o acesso individual aos bits que a compõe (0 a 15) através das funções 01, 02 e 05 do protocolo modbus.
O endereçamento destes bits segue a seguinte regra:
Endereço Binário = (Endereço Modbus * 16) + posição do bit desejado.
Exemplo: Deseja-se ler o status do bit3 da variável leitura da posição 42 do mapa de memória modbus. Qual o endereço binário deste bit ?
Endereço Binário = (42 * 16) + 3 = 675.
As tabelas de campos de bits listam as funções de cada bit dentro das variáveis de status e o seu respectivo endereço binário, para utilização com as funções de acesso a bits do protocolo modbus.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 122 de 173
CO
MU
NIC
AÇ
ÃO
SER
IAL
CO
MU
NIC
AÇ
ÃO
SER
IAL

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
6 - MAPA DE MEMÓRIA
O GRTD2000 possui 4 tipos de variável onde são armazenados os dados de ajuste e monitoramento do equipamento. São elas:
6.1 - VARIÁVEIS SOMENTE LEITURA
Estas variáveis possuem os valores das medições analógicas e dos status de operações internas do GRTD2000. Não aceitam operações de escrita, apenas leitura.
Podem ser acessadas através das funções 03 e 04 do protocolo Modbus.
São armazenadas em memoria do tipo volátil, significando que ao desligar o equipamento perdem o seu valor.
Variáveis Leitura: Medições Analógicas
End. Modbus
(dec)Nome da Variável Descrição
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 123 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Variáveis Leitura: Medições Analogicas
End.(dec) Nome da Variável Descrição Bases
0 an_varm_ab Tensão de armadura fase AB Varm
1 an_varm_bc Tensão de armadura fase BC Varm
2 an_varm_ca Tensão de armadura fase CA Varm
3 an_iarm_a Corrente de armadura fase AB Iarm
4 an_iarm_b Corrente de armadura fase BC Iarm
5 an_iarm_c Corrente de armadura fase CA Iarm
6 an_farm Frequência de armadura Freq
7 an_ang_ca_b Ângulo entre Vca e Ib Ang
8 an_vbus_ca Tensão de barramento fase CA Varm
9 an_fbus Frequência de barramento freq
10 an_ang_bus_arm Ângulo entre Vbus e Varm Ang
11 an_vdc_pt Tensão DC do campo Vfld
12 an_idc_pt1 Corrente DC ponte 1 Ifld
13 an_idc_pt2 Corrente DC ponte 2 Ifld
14 an_in_g1 Entrada analógica genérica 1 Q13_P
15 an_in_g2 Entrada analógica genérica 2 Q13_P
16 an_fp Fator de potencia calculado de Vca e Ib FP
17 an_pots Potencia aparente Pot
18 an_potp Potencia ativa Pot
19 an_potq Potencia reativa Pot
20 an_varm Tensão de armadura média das 3 fases Varm
21 an_iarm Corrente de armadura média das 3 fases Iarm
22 an_idc_pt Corrente DC media pontes 1 e 2 Ifld
23 an_vel Velocidade de rotação da máquina RPM
24 an_distr Posição do distribuidor
25 an_rotor Posição das pás do rotor
Tabela 6.1.1: Variáveis leitura: Medições analógicas
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 124 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Variáveis Leitura: Campos de Bits
End.(dec) Nome da Variável Descrição
40 st_ro_g1 Status Gerais 1
41 st_ro_g2 Status Gerais 2
42 st_lim_sup Status limites superiores
43 st_lim_inf Status limites inferiores
44 st_lim_g1 Status limites gerais
45 st_ro_al1 Status alarmes 1
46 st_ro_al2 Status alarmes 2
47 st_ro_ed1 Status entradas digitais 1
48 st_ro_pt1 Status proteções 1
49 st_rv_lim_sup Status limites superiores do regulador de velocidade
50 st_rv_lim_inf Status limites inferiores do regulador de velocidade
Tabela 6.1.2: Variáveis Leitura: Campos de Bits
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 125 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Variáveis Leitura: Regulador de Tensão
End.(dec) Nome da Variável Descrição Bases
60 rt_saida Saída de controle do regulador de tensão Q13_P
61 rt_ref_prim Referencia da malha de controle primária 1Varm,Vfld,Ifld ouQ13_P
62 rt_ref_sec referencia da malha de controle secundária 2FP ouPot
63 rt_modo_oper Modo de operação do regulador de tensão0: Falha1: Parado2: Controle manual ângulo3: Controle manual tensão4: Controle manual corrente5: Controle Uger6: Compensação de reativos7: Controle FP8: Controle Reativo
64 rt_comp_q Compensação de reativos somada a referência primária Varm
65 rt_saida_sec Saída de controle da malha secundária 1Varm,Vfld,Ifld ouQ13_P
Tabela 6.1.3: Variáveis Leitura: Regulador de Tensão
1
Variáveis Leitura: Limitadores
End.(dec) Nome da Variável Descrição Bases
100 lim_iexc_limterm Limite de corrente do limitador de sobre corrente de campo.
Ifld
101 lim_pq_limQ Limite de reativo do limitador de PxQ Pot
102 lim_vhz_vout Saída do limitador V/Hz somada a referência primária Varm
103 lim_iarm_vout Saída do limitador de corrente de armadura somada a referência primária
Varm
Tabela 6.1.4: Variáveis Leitura: Limitadores
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 126 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA
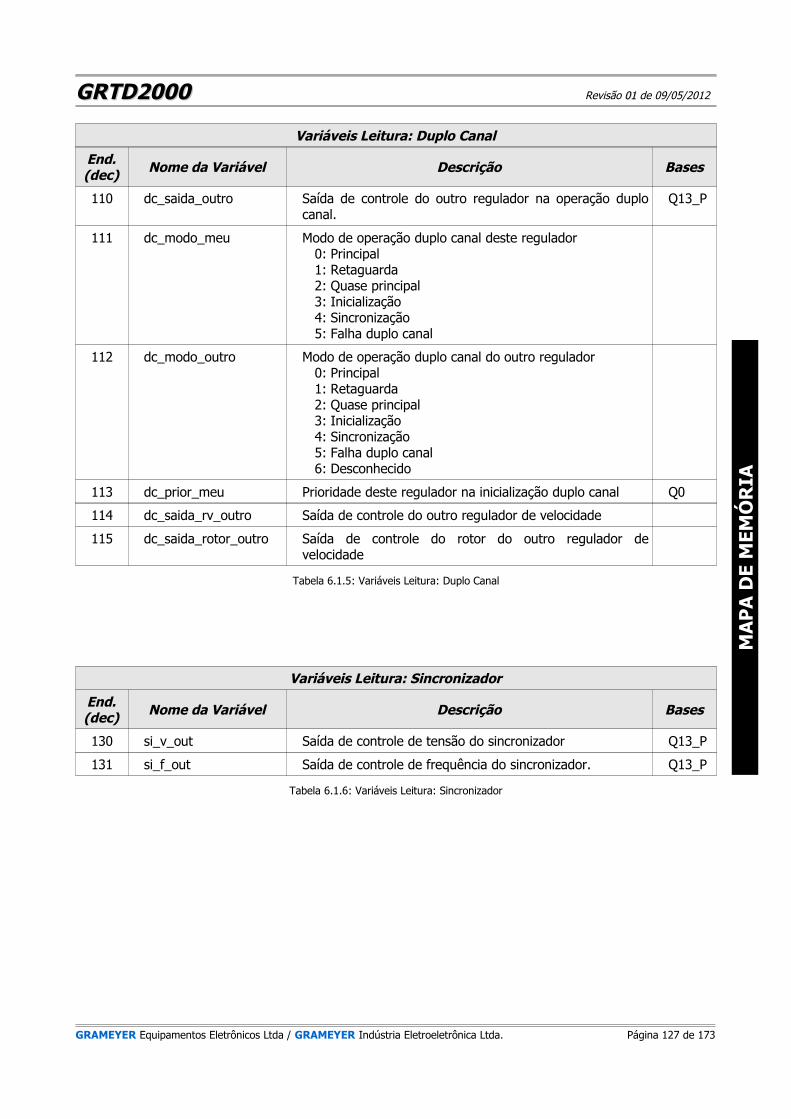
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Variáveis Leitura: Duplo Canal
End.(dec) Nome da Variável Descrição Bases
110 dc_saida_outro Saída de controle do outro regulador na operação duplo canal.
Q13_P
111 dc_modo_meu Modo de operação duplo canal deste regulador0: Principal1: Retaguarda2: Quase principal3: Inicialização4: Sincronização5: Falha duplo canal
112 dc_modo_outro Modo de operação duplo canal do outro regulador0: Principal1: Retaguarda2: Quase principal3: Inicialização4: Sincronização5: Falha duplo canal6: Desconhecido
113 dc_prior_meu Prioridade deste regulador na inicialização duplo canal Q0
114 dc_saida_rv_outro Saída de controle do outro regulador de velocidade
115 dc_saida_rotor_outro Saída de controle do rotor do outro regulador de velocidade
Tabela 6.1.5: Variáveis Leitura: Duplo Canal
Variáveis Leitura: Sincronizador
End.(dec) Nome da Variável Descrição Bases
130 si_v_out Saída de controle de tensão do sincronizador Q13_P
131 si_f_out Saída de controle de frequência do sincronizador. Q13_P
Tabela 6.1.6: Variáveis Leitura: Sincronizador
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 127 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Variáveis Leitura: Tempos de Execução
End.(dec) Nome da Variável Descrição Bases
140 exec_log_max Tempo máximo de execução da rotina lógica em ms. Q0_S
141 exec_log_med Tempo médio de execução da rotina lógica em ms. Q0_S
142 exec_logper_max Tempo máximo entre execuções consecutivas da rotina lógica em ms
Q0_S
143 exec_logper_med Tempo médio entre execuções da rotina lógica em ms Q0_S
Tabela 6.1.7: Variáveis Leitura: Tempos de Execução
Variáveis Leitura: Identificação do equipamento
End.(dec) Nome da Variável Descrição
150 id_serial_num1 Número de série do equipamento, parte 1
151 id_serial_num2 Número de série do equipamento, parte 2
152 id_versao_soft_up1 Versão do software do processador 1
153 id_versao_soft_up2 Versão do software do processador 2
154 id_hab_func1 Bits p/ desbloqueio das funções do regulador, parte 1
155 id_hab_func2 Bits p/ desbloqueio das funções do regulador, parte 2
Tabela 6.1.8: Variáveis Leitura: Identificação do equipamento
Variáveis Leitura: IrigB
End. Modbus
(dec)Nome da Variável Descrição
160 irigb_out Saída do controlador IRIG-B usado no ajuste da precisão do relógio
161 irig_erro Diferenca em (ms) entre o relógio do sistema e o valor recebido pelo sinal irigb
162 irig_seg Valor dos segundos recebido pelo sinal irig-b
163 irig_min Valor dos minutos recebido pelo sinal irig-b
164 irig_hora Valor das horas recebido pelo sinal irig-b
Tabela 6.1.9: Variáveis Leitura: IRIG-B
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 128 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Variáveis Leitura: Regulador de Velocidade
End.(dec) Nome da Variável Descrição Bases
170 rv_saida_pri Saída de controle da malha primária do regulador de velocidade
171 rv_saida_pri_comp Saída de controle da malha primária do regulador de velocidade com compensação de área cilindro e folga válvula
172 rv_saida_sec Saída de controle da malha secundária do regulador de velocidade
173 rv_ref_prim_lin Referencia da malha primária do regulador de velocidade linearizada
174 rv_saida_terc Saída de controle da malha terciária do regulador de velocidade
175 rv_ref_prim Referência da malha primária do regulador de velocidade
176 rv_comp_p Compensação de potência ativa somada a referência de velocidade
177 rv_ref_sec Referência da malha secundária do regulador de velocidade
178 rv_ref_terc Referência da malha terciária do regulador de velocidade
179 rv_modo_oper Modo de operação do regulador de velocidade0: Falha1: Parado2: Controle manual distribuidor3: Controle manual válvula4: Controle velocidade5: Compensação de potência ativa6: Controle potência ativa
180 rv_ref_rotor Referência da malha de controle de posição das pás do rotor
181 rv_saida_rotor Saída de malha de controle da posição do rotor
182 rv_saida_rotor_comp Saída de malha de controle da posição do rotor com compensação de área cilindro e folga válvula
183
Tabela 6.1.10: Variáveis Leitura: Regulador de Velocidade
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 129 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
6.1.1 - VARIÁVEIS CAMPOS DE BITS SOMENTE LEITURA
As tabelas abaixo apresentam a função de cada bit das variáveis de status do tipo leitura.
Campos de Bits
End Bit Bit Nome do Bit Descrição
Campos de Bits st_ro_g1 (End Modbus 40)
End Bit Bit Nome do Bit Descrição
640 0 st_rt_escorv_out Saída de escorvamento
641 1 st_pt_outro_ativo Indica que o outro regulador esta controlando a excitação
642 2 st_par_difer Sinaliza que algum parâmetros foi modificado e não foi salvo na memória não volátil.
643 3 st_mc_stop Indica que as gravações no cartão de memória estão suspensas
644 4 st_pt_meu_ativo Indica que este regulador está controlando a excitação.
645 5 st_os_fim Fim da aquisição dos dados de oscilografia.
646 6 st_si_sincr Condições de sincronismo atingidas
647 7 st_si_varm_ok Nível de tensão permite sincronismo
648 8 st_si_freq_ok Frequência permite sincronismo
649 9 st_si_fase_ok Defasagem permite sincronismo
650 10 st_si_f_up Pulso p/ aumento da frequência
651 11 st_si_f_dw Pulso p/ diminuição da frequência
652 12 st_si_v_up Pulso p/ aumento da tensão
653 13 st_si_v_dw Pulso p/ diminuição da tensão
654 14 st_log_difer Sinaliza que algum parâmetros da logica foi modificado e não foi salvo na memória não volátil.
655 15 st_pt_falha_me Ponte de excitação deste regulador indicando falha.
Tabela 6.1.1.1: Campos de Bits Somente Leitura: Status Gerais 1
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 130 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_ro_g2 (End Modbus 41)
End Bit Bit Nome do Bit Descrição
656 0 st_irig_lock Indica que o relógio do sistema esta sincronizado com o sinal IRIG-B
657 1 st_pt_falha_ot Ponte de excitação do outro regulador indicando falha.
658 2 reserva
659 3 reserva
660 4 reserva
661 5 reserva
662 6 reserva
663 7 reserva
664 8 reserva
665 9 reserva
666 10 reserva
667 11 reserva
668 12 reserva
669 13 reserva
670 14 reserva
671 15 reserva
Tabela 6.1.1.2: Campos de Bits Somente Leitura: Status Gerais 2
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 131 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_lim_sup (End Modbus 42)
End Bit Bit Nome do Bit Descrição
672 0 st_lim_iexc_lsup Limitador sobre corrente de campo atuando
673 1 st_lim_iarm_lsup Limitador iarm atuando no quadrante da sobreexcitação
674 2 st_lim_ref_man_sup Limitador de referência manual máxima atuando.
675 3 st_lim_ref_uarm_sup Limitador de referência de tensão de armadura máxima atuando.
676 4 st_lim_ref_fp_sup Limitador de referência de fator de potência máxima atuando.
677 5 st_lim_ref_q_sup Limitador de referência de potência reativa máxima atuando.
678 6 st_lim_ctrl_sec_max Saída do controle secundário no nível máximo
679 7 st_lim_ctrl_prim_max Saída do controle primário no nível máximo
680 8 reserva
681 9 reserva
682 10 reserva
683 11 reserva
684 12 reserva
685 13 reserva
686 14 reserva
687 15 reserva
Tabela 6.1.1.3: Campos de Bits Somente Leitura: Status limite superior
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 132 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_lim_inf (End Modbus 43)
End Bit Bit Nome do Bit Descrição
688 0 st_lim_iexc_linf Limitador sub corrente de campo atuando
689 1 st_lim_iarm_linf Limitador iarm atuando no quadrante da subexcitação
690 2 st_lim_pq Limitador pq atuando
691 3 st_lim_ref_man_inf Limitador de referência manual mínima atuando.
692 4 st_lim_ref_uarm_inf Limitador de referência de tensão de armadura mínima atuando.
693 5 st_lim_ref_fp_inf Limitador de referência de fator de potência mínima atuando.
694 6 st_lim_ref_q_inf Limitador de referência de potência reativa mínima atuando.
695 7 st_lim_ctrl_sec_min Saída do controle secundário no nível mínimo
696 8 st_lim_ctrl_prim_min Saída do controle primário no nível mínimo
697 9 reserva
698 10 reserva
699 11 reserva
700 12 reserva
701 13 reserva
702 14 reserva
703 15 reserva
Tabela 6.1.1.4: Campos de Bits Somente Leitura: Status limite inferior
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 133 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_lim_g1 (End Modbus 44)
End Bit Bit Nome do Bit Descrição
704 0 st_lim_vhz Limitador vhz atuando
705 1 st_lim_iarm_out_max Saída do limitador de corrente de armadura no máximo
706 2 st_lim_iarm_out_min Saída do limitador de corrente de armadura no mínimo
707 3 reserva
708 4 reserva
709 5 reserva
710 6 reserva
711 7 reserva
712 8 reserva
713 9 reserva
714 10 reserva
715 11 reserva
716 12 reserva
717 13 reserva
718 14 reserva
719 15 reserva
Tabela 6.1.1.5: Campos de Bits Somente Leitura: Status limites gerais
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 134 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_ro_al1 (End Modbus 45)
End Bit Bit Nome do Bit Descrição
720 0 st_falha_load_par Falha na leitura do parâmetros da eeprom
721 1 st_falha_store_par Falha na gravação dos parâmetros na eeprom
722 2 st_falha_erase_par Falha ao apagar área de parâmetros da eeprom
723 3 st_al_irigb Falha na recepção do sinal IRIG_B
724 4 st_falha_com_dc Falha de comunicação com outro regulador no duplo canal.
725 5 st_falha_pt Falha na ponte de excitação.
726 6 st_falha_sincr_dc Falha no sincronismo de dados duplo canal.
727 7 st_falha_re_buf Buffer do registro de eventos cheio com perda de dados antigos.
728 8 st_falha_load_log Indica falha na leitura da logica programável da flash
729 9 st_falha_store_log Indica falha na gravação da logica programável na flash
730 10 st_falha_erase_flash_log Indica falha ao apagar área de logica da flash
731 11 st_erro_logica Indica falha ao executar a rotina de logica programável.
732 12 st_mc_falha Falha na operação com cartão de memória.
733 13 st_rt_al_esc_exc Pulso de escorvamento ultrapassou o limite máximo.
734 14 st_si_falha_sincr Falha na operação do sincronizador.
735 15 st_erro_sa1 Falha na saída analógica 1
Tabela 6.1.1.6: Campos de Bits Somente Leitura: Alarmes 1
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 135 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_ro_al2 (End Modbus 46)
End Bit Bit Nome do Bit Descrição
736 0 st_erro_sa2 Falha na saída analógica 2
737 1 st_al_pt_rea_varm Perda de realimentação da tensão de armadura.
738 2 st_pt_erro_cod_func Código de desbloqueio do regulador errado.
739 3 reserva
740 4 reserva
741 5 reserva
742 6 reserva
743 7 reserva
744 8 reserva
745 9 reserva
746 10 reserva
747 11 reserva
748 12 reserva
749 13 reserva
750 14 reserva
751 15 reserva
Tabela 6.1.1.7: Campos de Bits Somente Leitura: Alarmes 2
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 136 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_ro_ed1 (End Modbus 47)
End Bit Bit Nome do Bit Descrição
752 0 st_ed1_1 Entrada digital 1
753 1 st_ed1_2 Entrada digital 2
754 2 st_ed1_3 Entrada digital 3
755 3 st_ed1_4 Entrada digital 4
756 4 st_ed1_5 Entrada digital 5
757 5 st_ed1_6 Entrada digital 6
758 6 st_ed1_7 Entrada digital 7
759 7 st_ed1_8 Entrada digital 8
760 8 st_ed1_9 Entrada digital 9
761 9 st_ed1_10 Entrada digital 10
762 10 st_ed1_11 Entrada digital 11
763 11 st_ed1_12 Entrada digital 12
764 12 st_ed1_13 Entrada digital 13
765 13 st_ed1_14 Entrada digital 14
766 14 st_ed1_15 Entrada digital 15
767 15 st_ed1_16 Entrada digital 16
Tabela 6.1.1.8: Campos de Bits Somente Leitura: Entradas digitais 1
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 137 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_ro_pt1 (End Modbus 48)
End Bit Bit Nome do Bit Descrição
768 0 st_falha_com_dsp Falha de comunicação com uP2
769 1 reserva
770 2 reserva
771 3 reserva
772 4 reserva
773 5 reserva
774 6 reserva
775 7 reserva
776 8 reserva
777 9 reserva
778 10 reserva
779 11 reserva
780 12 reserva
781 13 reserva
782 14 reserva
783 15 reserva
Tabela 6.1.1.9: Campos de Bits Somente Leitura: Proteções
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 138 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_rv_lim_sup (End Modbus 49)
End Bit Bit Nome do Bit Descrição
784 0 st_lim_rv_ctrl_pri_max Saída do controle primário do regulador de velocidade no nível máximo
785 1 st_lim_rv_ctrl_sec_max Saída do controle secundário do regulador de velocidade no nível máximo
786 2 st_lim_rv_ctrl_terc_max Saída do controle terciário do regulador de velocidade no nível máximo
787 3 st_lim_ref_rv_man_sup Limitador de referencia manual máximo atuando
788 4 st_lim_ref_vel_sup Limitador de referencia de velocidade máximo atuando
789 5 st_lim_ref_p_sup Limitador de referencia de potência ativa máximo atuando
790 6 st_lim_rv_ctrl_rotor_max Saída de controle de posição do rotor atingiu o limite superior
791 7 reserva
792 8 reserva
793 9 reserva
794 10 reserva
795 11 reserva
796 12 reserva
797 13 reserva
798 14 reserva
799 15 reserva
Tabela 6.1.1.10: Campos de Bits Somente Leitura: Status limite superior regulador de velocidade
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 139 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA
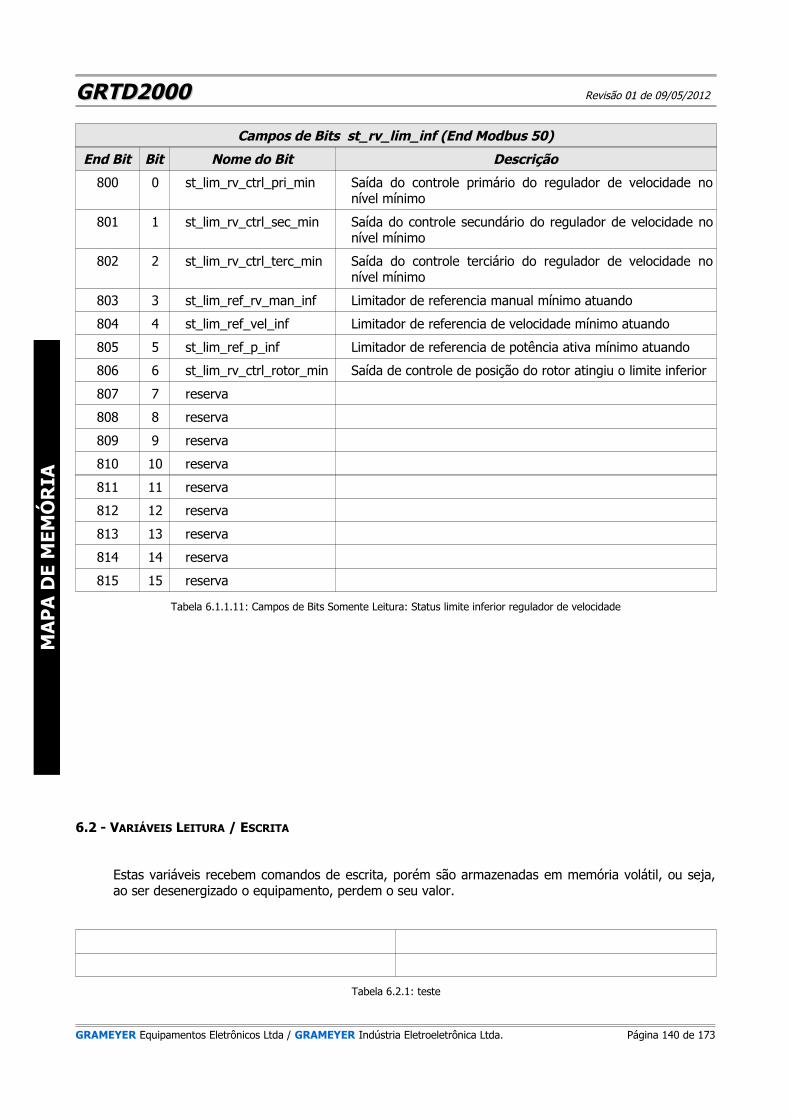
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_rv_lim_inf (End Modbus 50)
End Bit Bit Nome do Bit Descrição
800 0 st_lim_rv_ctrl_pri_min Saída do controle primário do regulador de velocidade no nível mínimo
801 1 st_lim_rv_ctrl_sec_min Saída do controle secundário do regulador de velocidade no nível mínimo
802 2 st_lim_rv_ctrl_terc_min Saída do controle terciário do regulador de velocidade no nível mínimo
803 3 st_lim_ref_rv_man_inf Limitador de referencia manual mínimo atuando
804 4 st_lim_ref_vel_inf Limitador de referencia de velocidade mínimo atuando
805 5 st_lim_ref_p_inf Limitador de referencia de potência ativa mínimo atuando
806 6 st_lim_rv_ctrl_rotor_min Saída de controle de posição do rotor atingiu o limite inferior
807 7 reserva
808 8 reserva
809 9 reserva
810 10 reserva
811 11 reserva
812 12 reserva
813 13 reserva
814 14 reserva
815 15 reserva
Tabela 6.1.1.11: Campos de Bits Somente Leitura: Status limite inferior regulador de velocidade
6.2 - VARIÁVEIS LEITURA / ESCRITA
Estas variáveis recebem comandos de escrita, porém são armazenadas em memória volátil, ou seja, ao ser desenergizado o equipamento, perdem o seu valor.
Tabela 6.2.1: teste
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 140 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Variáveis Leitura / Escrita: Regulador de Tensão
End. Nome da Variável Descrição Bases
512 rt_ref_man Referência de controle do modo manual 3Vfld,Ifld ouQ13_P
513 rt_ref_man_an Incremento na referencia manual proveniente de entrada analógica
3Vfld,Ifld ouQ13_P
514 rt_ref_uarm Referência de controle da tensão de armadura Varm
515 rt_ref_uarm_an Incremento na referencia de tensão de armadura proveniente de entrada analógica
Varm
516 rt_ref_fp Referência de controle do fator de potência FP
517 rt_ref_fp_an Incremento na referencia de fator de potência proveniente de entrada analógica
FP
518 rt_ref_q Referência de controle de potência reativa Pot
519 rt_ref_q_an Incremento na referencia de potencia reativa proveniente de entrada analógica
Pot
Tabela 6.2.2: Variáveis Leitura / Escrita: Regulador de Tensão
Variáveis Leitura / Escrita: Campos de Bits
End. Nome da Variável Descrição
562 st_rw_1 Campos de bits gerais 1
563 st_rw_2 Campos de bits gerais 2
564 st_rw_sd1 Bits de saídas digitais
Tabela 6.2.3: Variáveis Leitura / Escrita: Campos de Bits
Variáveis Leitura / Escrita: Saídas Analógicas
End. Nome da Variável Descrição Bases
612 an_out_g1 Saída analógica geral 1 Q13_P
613 an_out_g2 Saída analógica geral 2 Q13_P
Tabela 6.2.4: Variáveis Leitura / Escrita: Saídas Analógicas
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 141 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Variáveis Leitura / Escrita: Relógio
End. Nome da Variável Descrição
662 tm_seg_min Contador de segundos e minutos do relógiobits0-7: segbits8-15: min;
663 tm_hora_dia Contador de horas e dias do relógiobits0-7: horabits8-15: dia
664 tm_mes_ano Contador de meses e anos do relógiobits0-7: mesbits8-15: ano
Tabela 6.2.5: Variáveis Leitura / Escrita: Relógio
Variáveis Leitura / Escrita: Regulador de Velocidade
End. Nome da Variável Descrição Bases
672 rv_ref_man Referencia de controle do modo manual
673 rv_ref_man_an Incremento na referencia manual proveniente de entrada analógica
674 rv_ref_vel Referencia de controle de velocidade
rv_ref_vel_an Incremento na referencia de velocidade proveniente de entrada analógica
rv_ref_p Referencia de controle de potência ativa
rv_ref_p_an Incremento na referencia de potência ativa proveniente de entrada analógica
Tabela 6.2.6: Variáveis Leitura / Escrita: Regulador de Velocidade
6.2.1 - VARIÁVEIS CAMPOS DE BITS LEITURA / ESCRITA
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 142 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
As tabelas abaixo apresentam a função de cada bit das variáveis de status do tipo leitura / escrita.
Campos de Bits st_rw_1 (End Modbus 562)
End Bit Bit Nome do Bit Descrição
8992 0 st_save_par Grava parâmetros e lógica da RAM para a EEPROM e FLASH
8993 1 st_reload_par Grava parâmetros e lógica da EEPROM e FLASH para a RAM
8994 2 st_stop_logic Para a execução das rotinas lógicas
8995 3 st_rt_enable Habilita regulador de tensão
8996 4 st_rt_ctrl_sec Habilita malha de controle secundário do regulador de tensão p/ operação em paralelo
8997 5 st_rt_ed_up Aumenta referência do regulador de tensão
8998 6 st_rt_ed_dw Diminui referência do regulador de tensão
8999 7 st_rt_modo_man Habilita modo manual do regulador de tensão
9000 8 st_dc_torna_princ Modifica o modo duplo canal para principal
9001 9 st_re_stop_sd Para de gravar dados no cartão de memória SD
9002 10 st_si_en Habilita sincronizador
9003 11 st_rt_reset_ref Reseta as referências do regulador de tensão para os valores inicias
9004 12 st_rt_comp_q Habilita compensação de reativos ( estatismo)
9005 13 st_os_trig Trigger na oscilografia
9006 14 st_rv_enable Habilita regulador de velocidade
9007 15 st_rv_reset_ref Reseta referências do regulador de velocidade para valores iniciais
Tabela 6.2.1.1: Campos de Bits Leitura / Escrita: Status gerais 1
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 143 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_rw_2 (End Modbus 563)
End Bit Bit Nome do Bit Descrição
9008 0 st_rv_ed_up Aumenta referência do regulador de velocidade
9009 1 st_rv_ed_dw Diminui referência do regulador de velocidade
9010 2 st_rv_ctrl_sec Habilita malha de controle secundário (velocidade)
9011 3 st_rv_ctrl_terc Habilita malha de controle terciário (potência ativa)
9012 4 st_rv_comp_p Habilita compensação de potência ativa
9013 5 st_rv_fbsec_freq Seleciona realimentação da malha de velocidade pela frequência
9014 6 st_rv_fbdrp_dist Seleciona realimentação da compensação de potência ativa pela posição do distribuidor
9015 7 st_rv_fbpot_dist Seleciona realimentação da malha de potência ativa pela posição do distribuidor
9016 8 reserva
9017 9 reserva
9018 10 reserva
9019 11 reserva
9020 12 reserva
9021 13 reserva
9022 14 reserva
9023 15 reserva
Tabela 6.2.1.2: Campos de Bits Leitura / Escrita: Status gerais 2
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 144 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA
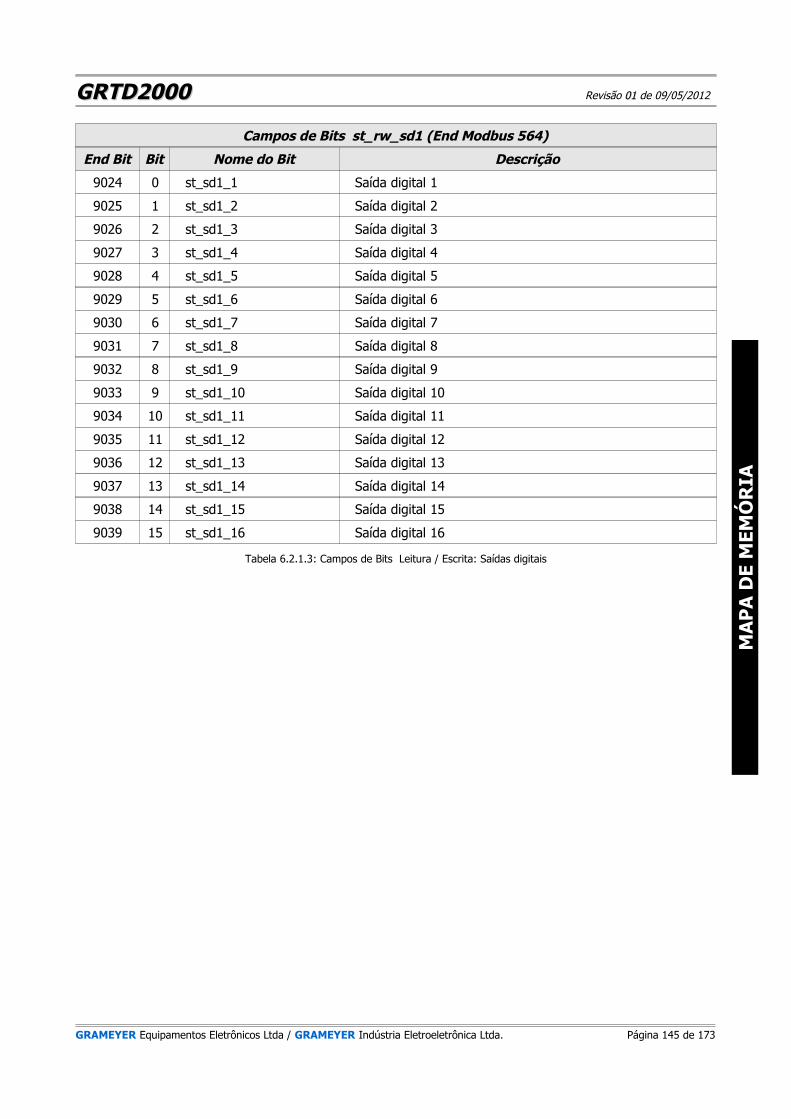
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_rw_sd1 (End Modbus 564)
End Bit Bit Nome do Bit Descrição
9024 0 st_sd1_1 Saída digital 1
9025 1 st_sd1_2 Saída digital 2
9026 2 st_sd1_3 Saída digital 3
9027 3 st_sd1_4 Saída digital 4
9028 4 st_sd1_5 Saída digital 5
9029 5 st_sd1_6 Saída digital 6
9030 6 st_sd1_7 Saída digital 7
9031 7 st_sd1_8 Saída digital 8
9032 8 st_sd1_9 Saída digital 9
9033 9 st_sd1_10 Saída digital 10
9034 10 st_sd1_11 Saída digital 11
9035 11 st_sd1_12 Saída digital 12
9036 12 st_sd1_13 Saída digital 13
9037 13 st_sd1_14 Saída digital 14
9038 14 st_sd1_15 Saída digital 15
9039 15 st_sd1_16 Saída digital 16
Tabela 6.2.1.3: Campos de Bits Leitura / Escrita: Saídas digitais
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 145 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
6.3 - VARIÁVEIS PARÂMETROS
Estas variáveis são responsáveis pela parametrização das funções do regulador de tensão, sendo armazenadas em memória não volátil, ou seja, mesmo que o equipamento seja desenergizado, mantem o seu valor.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 146 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Parâmetros: Configuração
End. Nome da Variável Descrição Bases
1025 cf_eth_ip_adr1-2 Endereço IP, partes 1 e 2bits0-7 – End. IP1bits8-15 – End. IP2
1026 cf_eth_ip_adr3-4 Endereço IP, partes 3 e 4bits0-7 – End. IP3bits8-15 – End. IP4
1027 cf_eth_msk1-2 Mascara de subrede, partes 1 e 2bits0-7 – Masc. 1bits8-15 – Masc. 2
1028 cf_eth_msk3-4 Mascara de subrede, partes 3 e 4bits0-7 – Masc. 3bits8-15 – Masc. 4
1029 cf_eth_gtway1-2 Gateway padrão, partes 1 e 2bits0-7 – Gw. 1bits8-15 – Gw. 2
1030 cf_eth_gtway3-4 Gateway padrão, partes 3 e 4bits0-7 – Gw. 3bits8-15 – Gw. 4
1031 cf_eth_dnspri1-2 Servidor DNS preferencial, partes 1 e 2bits0-7 – dnsp. 1bits8-15 – dnsp. 2
1032 cf_eth_dnspri3-4 Servidor DNS preferencial, partes 3 e 4bits0-7 – dnsp. 3bits8-15 – dnsp. 4
1033 cf_eth_dnssec1-2 Servidor DNS alternativo, partes 1 e 2bits0-7 – dnss. 1bits8-15 – dnss. 2
1034 cf_eth_dnssec3-4 Servidor DNS alternativo, partes 3 e 4bits0-7 – dnss. 3bits8-15 – dnss. 4
1035 cf_com1 Endereço e Baudrate COM1bits0-7: addressbits8-15: baudrate
0 = 4800 bps;1 = 9600 bps;2 = 19200 bps;3 = 38400 bps;4 = 115200 bps;
1036 cf_com2 Endereço e Baudrate COM2bits0-7: addressbits8-15: baudrate
0 = 4800 bps;1 = 9600 bps;2 = 19200 bps;3 = 38400 bps;4 = 115200 bps;
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 147 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1037 cf_rea_varm Topologia e nível da realimentação da tensão de armadurabits0-7: top
0 = Monofásico;1 = Trifásico;
bits8-15: niv0 = 120V;1 = 240V;2 = 480V;3 = 600V;
1038 cf_rea_iarm Topologia e nível da realimentação da corrente de armadura
bits0-7: top0 = Monofásico;1 = Trifásico;
bits8-15: niv0 = 1A;1 = 5A;
1039 cf_rea_vtr Topologia e nível da realimentação da tensão do transformador de alimentação da ponte.
bits0-7: top0 = Monofásico;1 = Trifásico;
bits8-15: niv0 = 200V;1 = 600V;
1040 cf_rea_vtr_vfld Frequência de corte da realimentação da tensão do transformador de alimentação da ponte e nível da realimentação da tensão de campo.
bits0-7: vtr_freq0 = 60Hz;1 = 120Hz;2 = 240Hz;3 = 290Hz;
bits8-15: vfld_niv0 = 80V;1 = 240V;2 = 720V;
1041 cf_avr_pt Topologia do regulador de tensão e topologia da ponte de excitação.
bits0-7: avr_top0 = Canal simples;1 = Canal duplo;
bits8-15: ponte_top0 = 1 IGBT;
1042 cf_sa_1_2 Tipo das saídas analógicas 1 e 2.bits0-7: sa1_tipo
0 = corrente;1 = tensão;
bits8-15: sa2_tipo0 = corrente;1 = tensão;
1043 cf_ed_vel_irig Função das entradas digitais de medição de velocidade e
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 148 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
IRIG-Bbits0-7: ed_vel
0 = ED-Geral;1 = Velocidade;
bits8-15: ed_irig0 = ED-Geral;1 = Irig-B;
1044 cf_an_in1_max Valor máximo medido na entrada analógica 1 Q13_P
1045 cf_an_in1_max_nor Valor máximo escalado medido na entrada analógica 1 Q13_P
1046 cf_an_in1_min Valor mínimo medido na entrada analógica 1 Q13_P
1047 cf_an_in1_min_nor Valor mínimo escalado medido na entrada analógica 1 Q13_P
1048 cf_an_in1_address Endereço modbus onde o valor da entrada analógica 1 será escrito
1049 cf_an_in2_max Valor máximo medido na entrada analógica 2 Q13_P
1050 cf_an_in2_max_nor Valor máximo escalado medido na entrada analógica 2 Q13_P
1051 cf_an_in2_min Valor mínimo medido na entrada analógica 2 Q13_P
1052 cf_an_in2_min_nor Valor mínimo escalado medido na entrada analógica 2 Q13_P
1053 cf_an_in2_address Endereço modbus onde o valor da entrada analógica 2 será escrito
1054 cf_an_out1_max Valor máximo obtido na saída analógica 1 Q13_P
1055 cf_an_out1_max_nor Valor máximo escalado obtido na saída analógica 1 Q13_P
1056 cf_an_out1_min Valor mínimo obtido na saída analógica 1 Q13_P
1057 cf_an_out1_min_nor Valor mínimo escalado obtido na saída analógica 1 Q13_P
1058 cf_an_out1_address Endereço modbus onde o valor da saída analógica 1 será lido
1059 cf_an_out2_max Valor máximo obtido na saída analógica 2 Q13_P
1060 cf_an_out2_max_nor Valor máximo escalado obtido na saída analógica 2 Q13_P
1061 cf_an_out2_min Valor mínimo obtido na saída analógica 2 Q13_P
1062 cf_an_out2_min_nor Valor mínimo escalado obtido na saída analógica 2 Q13_P
1063 cf_an_out2_address Endereço modbus onde o valor da saída analógica 2 será lido
1064 cf_maq_reat_sincr Reatância síncrona da maquina. Q13_P
1065 cf_id_hab_cod1 Código para habilitar funções do software, parte1
1066 cf_id_hab_cod2 Código para habilitar funções do software, parte2
1067 cf_id_hab_cod3 Código para habilitar funções do software, parte3
1068 cf_id_hab_cod4 Código para habilitar funções do software, parte4
1069 cf_dc_priorid Prioridade do equipamento na inicialização duplo canal Q0
1070 cf_vel_ppr Pulsos por rotação do transdutor de velocidade Q0
1071 cf_vel_rpmn Rotações por minuto nominal da máquina Q0
1072 cf_distr_orig Endereço modbus de onde será lido a posição do distribuidor
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 149 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1073 cf_rotor_orig Endereço modbus de onde será lido a posição do rotor
Tabela 6.3.1: Parâmetros: Configuração
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 150 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Parâmetros: Calibração
End. Nome da Variável Descrição Bases
1074 cl_off_varm_ab Offset tensão de armadura fase AB Varm
1075 cl_gain_varm_ab Ganho tensão de armadura fase AB Q13
1076 cl_off_varm_bc Offset tensão de armadura fase BC Varm
1077 cl_gain_varm_bc Ganho tensão de armadura fase BC Q13
1078 cl_off_varm_ca Offset tensão de armadura fase CA Varm
1079 cl_gain_varm_ca Ganho tensão de armadura fase CA Q13
1080 cl_off_iarm_a Offset corrente de armadura fase A Iarm
1081 cl_gain_iarm_a Ganho corrente de armadura fase A Q13
1082 cl_off_iarm_b Offset corrente de armadura fase B Iarm
1083 cl_gain_iarm_b Ganho corrente de armadura fase B Q13
1084 cl_off_iarm_c Offset corrente de armadura fase C Iarm
1085 cl_gain_iarm_c Ganho corrente de armadura fase C Q13
1086 cl_off_farm Offset frequência de armadura Freq
1087 cl_gain_farm Ganho frequência de armadura Q13
1088 cl_off_ang_ca_b Offset ângulo entre Vca e Ib Ang
1089 cl_gain_ang_ca_b Ganho ângulo entre Vca e Ib Q13
1090 cl_off_vbus_ca Offset tensão de barramento fase CA Varm
1091 cl_gain_vbus_ca Ganho tensão de barramento fase CA Q13
1092 cl_off_fbus Offset frequência de barramento Freq
1093 cl_gain_fbus Ganho frequência de barramento Q13
1094 cl_off_ang_bus_arm Offset ângulo entre Varm e Vbus Ang
1095 cl_gain_ang_bus_arm Ganho ângulo entre Varm e Vbus Q13
1096 cl_off_vdc_pt Offset tensão DC da ponte Vfld
1097 cl_gain_vdc_pt Ganho tensão DC da ponte Q13
1098 cl_off_idc_pt1 Offset corrente DC da ponte 1 Ifld
1099 cl_gain_idc_pt1 Ganho corrente DC da ponte 1 Q13
1100 cl_off_idc_pt2 Offset corrente DC da ponte 2 Ifld
1101 cl_gain_idc_pt2 Ganho corrente DC da ponte 2 Q13
1102 cl_off_in_g1 Offset entrada analógica 1 Q13_P
1103 cl_gain_in_g1 Ganho entrada analógica 1 Q13
1104 cl_off_in_g2 Offset entrada analógica 2 Q13_P
1105 cl_gain_in_g2 Ganho entrada analógica 2 Q13
1106 cl_off_out_g1 Offset saída analógica 1 Q13_P
1107 cl_gain_out_g1 Ganho saída analógica 1 Q13
1108 cl_off_out_g2 Offset saída analógica 2 Q13_P
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 151 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1109 cl_gain_out_g2 Ganho saída analógica 2 Q13
1110 cl_gain_clock Ganho para calibracao do relogio do sistema. Positivo faz o relogio adiantar. Cada unidade representa um incremento/decremento de 75ms/dia.
Q0
Tabela 6.3.2: Parâmetros: Calibração
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 152 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Parâmetros: Limitadores
End. Nome da Variável Descrição Bases
1124 lim_iexc_max Limite máximo do limitador de sobre corrente de excitação.
Ifld
1125 lim_iexc_term Limite térmico do limitador de sobre corrente de excitação (regime permanente).
Ifld
1126 lim_iexc_min Limite mínimo do limitador de sub corrente de excitação. Ifld
1127 lim_iexc_kp Ganho proporcional do limitador de sub/sobre corrente de campo.
Q0
1128 lim_iexc_ki Ganho integral do limitador de sub/sobre corrente de campo.
Q0
1129 lim_iexc_ki_ret Ganho integral do retardo para atuação do limitador de sub/sobre corrente de excitação.
Q0
1130 lim_pq_q_p0 Potência reativa quando a potência ativa for zero, do limitador PxQ
Pot
1131 lim_pq_r_P_Q Tangente do ângulo formado por Q e P (dQ/dP). (Q*8192)/P
Q13
1132 lim_pq_kp Ganho proporcional do limitador PxQ Q0
1133 lim_pq_ki Ganho integral do limitador PxQ Q0
1134 lim_vhz_freq Frequência a partir do qual atua o limitador V/Hz Freq
1135 lim_vhz_droop Relação V/Hz VHz
1136 lim_iarm_lim Limite de corrente de armadura Iarm
1137 lim_iarm_kp Ganho proporcional do limitador de corrente de armadura Q0
1138 lim_iarm_ki Ganho integral do limitador de corrente de armadura Q0
1139 lim_iarm_out_max Limite máximo da saída do limitador de corrente de armadura.
Varm
1140 lim_iarm_out_min Limite mínimo da saída do limitador de corrente de armadura
Varm
1141 lim_ctrl_prim_max Limite máximo da saída da malha de controle primário. Q13_P
1142 lim_ctrl_prim_min Limite mínimo da saída da malha de controle primário. Q13_P
1143 lim_ref_man_max Limite máximo da referência do modo manual 3Vfld,Ifld ouQ13_P
1144 lim_ref_man_min Limite mínimo da referência do modo manual 3Vfld,Ifld ouQ13_P
1145 lim_ref_uarm_max Limite máximo da referência de tensão de armadura Varm
1146 lim_ref_uarm_min Limite mínimo da referência de tensão de armadura Varm
1147 lim_ref_fp_max Limite máximo da referência de fator de potência FP
1148 lim_ref_fp_min Limite mínimo da referência de fator de potência FP
1149 lim_ref_q_max Limite máximo da referência de potência reativa Pot
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 153 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1150 lim_ref_q_min Limite mínimo da referência de potência reativa Pot
1151 lim_ctrl_sec_max Limite máximo da saída da malha de controle secundário 1Varm,Vfld,Ifld ouQ13_P
1152 lim_ctrl_sec_min Limite mínimo da saída da malha de controle secundário 1Varm,Vfld,Ifld ouQ13_P
1153 lim_ref_rv_man_max Valor máximo da referencia de modo manual do regulador de velocidade
1154 lim_ref_rv_man_min Valor mínimo da referencia de modo manual do regulador de velocidade
1155 lim_ref_vel_max Valor máximo da referencia de velocidade
1156 lim_ref_vel_min Valor mínimo da referencia de velocidade
1157 lim_ref_p_max Valor máximo da referencia de potência ativa
1158 lim_ref_p_min Valor mínimo da referencia de potência ativa
1159 lim_rv_ctrl_prim_max Valor máximo da saída de controle da malha primária do regulador de velocidade
1160 lim_rv_ctrl_prim_min Valor mínimo da saída de controle da malha primária do regulador de velocidade
1161 lim_rv_ctrl_sec_max Valor máximo da saída de controle da malha secundária do regulador de velocidade
1162 lim_rv_ctrl_sec_min Valor mínimo da saída de controle da malha secundária do regulador de velocidade
1163 lim_rv_ctrl_terc_max Valor máximo da saída de controle da malha terciária do regulador de velocidade
1164 lim_rv_ctrl_terc_min Valor mínimo da saída de controle da malha terciária do regulador de velocidade
1165 lim_rv_ctrl_rotor_max Valor máximo da saída de controle da malha de posição do rotor
1166 lim_rv_ctrl_rotor_min Valor mínimo da saída de controle da malha de posição do rotor
1167 lim_rv_ctrl_prim_min_2 Valor mínimo da saída de controle da malha primária do regulador de velocidade - 2º estágio
1168 lim_rv_ctrl_prim_pos Posição do distribuidor que ativa segundo estágio do limite minimo do controle primário
Tabela 6.3.3: Parâmetros: Limitadores
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 154 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Parâmetros: Regulador de Tensão
End. Modb
us (dec)
Nome da Variável Descrição Bases
1174 rt_out_ini Valor inicial da saída de controle Q13_P
1175 rt_modo_man Modo de controle manual0: Contr. de ângulo1: Contr. tensão campo2: Contr. corrente campo
1176 rt_ref_man_ini Referencia de modo manual inicial 3Vfld,Ifld ouQ13_P
1177 rt_incr_ed_manual Incremento da entrada digital em unid/seg para o modo manual
3Vfld,Ifld ouQ13_P
1178 rt_incr_ramp_man Incremento da rampa de referência manual em unid/seg 3Vfld,Ifld ouQ13_P
1179 rt_kp_manual Ganho proporcional do controlador de modo manual Q0
1180 rt_ki_manual Ganho integral do controlador de modo manual Q0
1181 rt_modo_ctrl_sec Modo de controle secundário p/ operação em paralelo0: Contr. de FP1: Contr. Q
1182 rt_ref_uarm_ini Referencia do controle de tensão de armadura inicial Varm
1183 rt_incr_ed_uarm Incremento da entrada digital em unid/seg para tensão armadura
Varm
1184 rt_incr_ramp_uarm Incremento da rampa de referência de tensão de armadura em unid/seg
Varm
1185 rt_kp_uarm Ganho proporcional do controlador de tensão de armadura Q0
1186 rt_ki_uarm Ganho integral do controlador de tensão de armadura Q0
1187 rt_kd_uarm Ganho derivativo do controlador de tensão de armadura Q0
1188 rt_droop Estatismo do modo paralelo Q13_P
1189 rt_ref_fp_ini Referencia do controle de fator de potencia inicial FP
1190 rt_incr_ed_fp Incremento da entrada digital em unid/seg para fator potência
FP
1191 rt_incr_ramp_fp Incremento da rampa de fator de potência em unid/seg FP
1192 rt_kp_fp Ganho proporcional do controlador de fator de potência Q0
1193 rt_ki_fp Ganho integral do controlador de fator de potência Q0
1194 rt_ref_q_ini Referencia do controle de potência reativa inicial Pot
1195 rt_incr_ed_q Incremento da entrada digital em unid/seg para potência reativa
Pot
1196 rt_incr_ramp_q Incremento da rampa de potência reativa em unid/seg Pot
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 155 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA
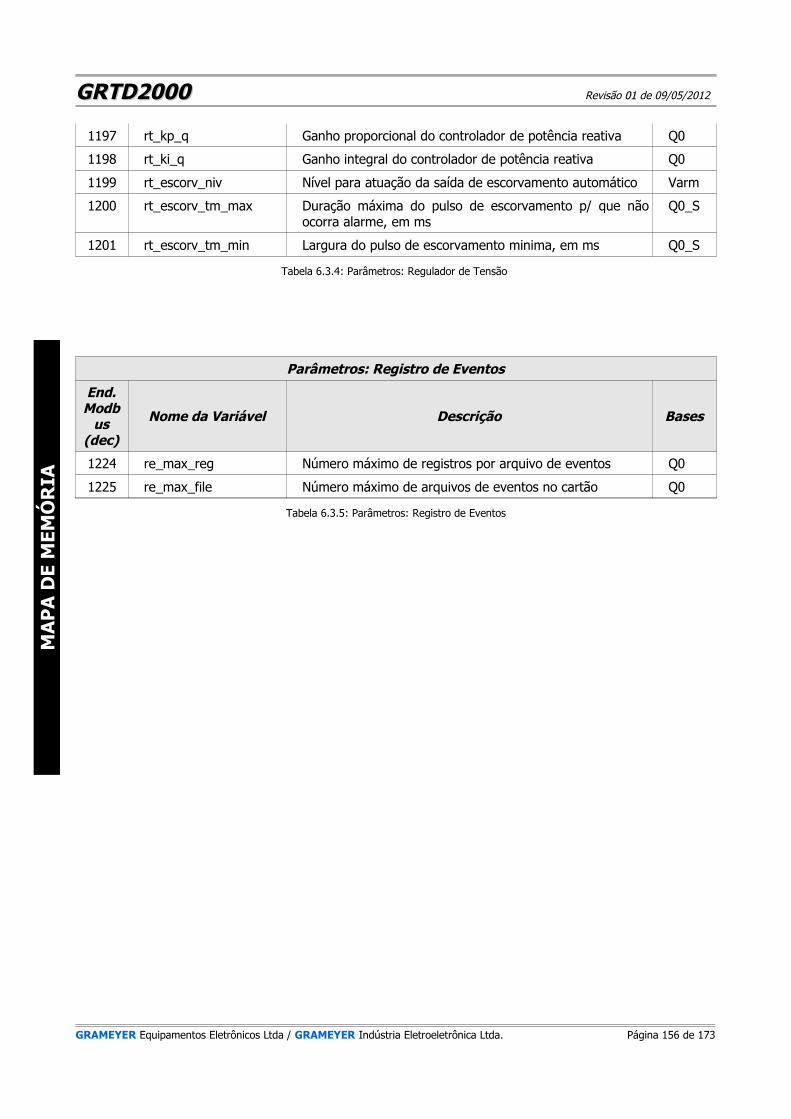
GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1197 rt_kp_q Ganho proporcional do controlador de potência reativa Q0
1198 rt_ki_q Ganho integral do controlador de potência reativa Q0
1199 rt_escorv_niv Nível para atuação da saída de escorvamento automático Varm
1200 rt_escorv_tm_max Duração máxima do pulso de escorvamento p/ que não ocorra alarme, em ms
Q0_S
1201 rt_escorv_tm_min Largura do pulso de escorvamento minima, em ms Q0_S
Tabela 6.3.4: Parâmetros: Regulador de Tensão
Parâmetros: Registro de Eventos
End. Modb
us (dec)
Nome da Variável Descrição Bases
1224 re_max_reg Número máximo de registros por arquivo de eventos Q0
1225 re_max_file Número máximo de arquivos de eventos no cartão Q0
Tabela 6.3.5: Parâmetros: Registro de Eventos
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 156 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Parâmetros: Oscilografia
End. Modb
us (dec)
Nome da Variável Descrição Bases
1234 os_max_file Número máximo de arquivos de oscilografia no cartão Q0
1235 os_n_canais Número de canais de oscilografia ativos Q0
1236 os_total_pts Total de pontos do buffer de oscilografia = pontos por canal * numero de canais
Q0
1237 os_pos_pts Total de pontos pós falta do buffer de oscilografia = pontos pos falta por canal * numero de canais
Q0
1238 os_var1 Endereço modbus da variável do canal 1
1239 os_var2 Endereço modbus da variável do canal 2
1240 os_var3 Endereço modbus da variável do canal 3
1241 os_var4 Endereço modbus da variável do canal 4
1242 os_var5 Endereço modbus da variável do canal 5
1243 os_var6 Endereço modbus da variável do canal 6
1244 os_var7 Endereço modbus da variável do canal 7
1245 os_var8 Endereço modbus da variável do canal 8
Tabela 6.3.6: Parâmetros: Oscilografia
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 157 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Parâmetros: Sincronizador
End. Modb
us (dec)
Nome da Variável Descrição Bases
1254 si_mode Modo de operação do sincronizador0: Sincronizador1: Check Sincronismo2: Barra Morta3: Auto Sincr
1255 si_vmax_bm Tensão máxima de barramento para permitir fechar em barra morta
Varm
1256 si_slip Referência de escorregamento, se Farm < Fbus, escorregamento é positivo
Freq
1257 si_dslip Erro de escorregamento que permite fechar Freq
1258 si_kp_freq Ganho proporcional do controle de referencia de frequência
Q0
1259 si_max_p_freq Largura ou período entre pulsos máximo do controle de frequência
Q0_S
1260 si_min_p_freq Largura ou período entre pulsos mínimo do controle de frequência
Q0_S
1261 si_per_freq Período entre pulsos ou largura do controle de frequência Q0_S
1262 si_freq_mode Modo de controle de frequência0: Largura de pulso1: Frequência variável
1263 si_kp_varm Ganho proporcional do controle de referencia de tensão de armadura
Q0
1264 si_max_p_varm Largura ou período entre pulsos máximo do controle de tensão de armadura
Q0_S
1265 si_min_p_varm Largura ou período entre pulsos mínimo do controle de tensão de armadura
Q0_S
1266 si_per_varm Período entre pulsos ou largura do controle de tensão de armadura
Q0_S
1267 si_dvarm Diferença entre tensão de armadura e de barra para permitir fechar
Varm
1268 si_dfase Diferença de fase entre armadura e barra para permitir fechar.
Ang
1269 si_volt_mode Modo de controle de tensão0: Largura de pulso1: Frequência variável
1270 si_max_time_sincr Tempo máximo para obter o sincronismo sem que ocorra alarme
Q0_S
Tabela 6.3.7: Parâmetros: Sincronizador
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 158 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Parâmetros: Campos de Bits
End. Modbus
(dec)Nome da Variável Descrição
1274 st_par1 Variável com parâmetros binários gerais
Tabela 6.3.8: Parâmetros: Campos de Bits
Parâmetros: Proteção
End. Modb
us (dec)
Nome da Variável Descrição Bases
1284 pt_rea_varm_desb Nível de desbalanço permitido entre fases Q13_P
1285 pt_rea_varm_temp Tempo em ms p/ atuação da proteção de falta de realimentação
Q0_S
1286 pt_rea_varm_niv Nível de realimentação em PU abaixo do qual atua a proteção
Q13_P
Tabela 6.3.9: Parâmetros: Proteção
Parâmetros: IHM
End. Modb
us (dec)
Nome da Variável Descrição Bases
1304 ihm_contrast Ajuste do contraste da IHM Q13_P
1305 ihm_modo_back Modo de operação do backlight0: Automático1: Ligado2: Desligado
1306 ihm_tempo_back Tempo de atuação do backlight em segundos Q0
Tabela 6.3.10: Parâmetros: IHM
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 159 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Parâmetros: Bases
End. Modbus
(dec)
Nome da Variável Descrição Bases
1314 bs_varm_pri Tensão de armadura base do lado primário do transformador
Q0
1315 bs_varm_sec Tensão de armadura base do lado secundário do transformador
Q0
1316 bs_iarm_pri Corrente de armadura base do lado primário do transformador
Q0
1317 bs_iarm_sec Corrente de armadura base do lado secundario do transformador
Q0
1318 bs_vfld_pri Tensão de campo base do lado primário do transformador Q0
1319 bs_vfld_sec Tensão de campo base do lado secundario do transformador
Q0
1320 bs_ifld_pri Corrente de campo base do lado primário do transformador
Q0
1321 bs_ifld_sec Tensão base do lado secundario do transformador de corrente de campo
Q10
Tabela 6.3.11: Parâmetros: Bases
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 160 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Parâmetros: Regulador de Velocidade
End. Modb
us (dec)
Nome da Variável Descrição Bases
1324 rv_out_ini Valor inicial da saída de controle do regulador de velocidade
1325 rv_modo_man Seleciona modo de controle manual0: Contr. posição do distribuidor1: Contr. abertura da válvula
1326 rv_ref_man_ini Referencia de modo manual inicial
1327 rv_incr_ed_manual Incremento da entrada digital em unid/seg para o modo manual
1328 rv_incr_ramp_man Incremento da rampa de referência manual em unid/seg
1329 rv_kp_manual Ganho proporcional do controlador de modo manual
1330 rv_ki_manual Ganho integral do controlador de modo manual
1331 rv_ref_vel_ini Referência de controle de velocidade inicial
1332 rv_incr_ed_vel Incremento da entrada digital em unid/seg para referência de velocidade
1333 rv_incr_ramp_vel Incremento da rampa de referência de velocidade em unid/seg
1334 rv_kp_vel Ganho proporcional do controlador de velocidade
1335 rv_ki_vel Ganho integral do controlador de velocidade
1336 rv_kd_vel Ganho derivativo do controlador de velocidade
1337 rv_ref_p_ini Referencia de potência ativa inicial
1338 rv_incr_ed_p Incremento da entrada digital em unid/seg para referência de potência ativa
1339 rv_incr_ramp_p Incremento da rampa de referência de potencia ativa em unid/seg
1340 rv_kp_p Ganho proporcional do controlador de potência ativa
1341 rv_ki_p Ganho integral do controlador de potência ativa
1342 rv_droop Ganho da compensação de potência ativa (Estatismo)
1343 rv_dist_tb_in1 Valor entrada ponto 1 da tabela de linearização do distribuidor
1344 rv_dist_tb_out1 Valor saída ponto 1 da tabela de linearização do distribuidor
1345 rv_dist_tb_in2 Valor entrada ponto 2 da tabela de linearização do distribuidor
1346 rv_dist_tb_out2 Valor saída ponto 2 da tabela de linearização do distribuidor
1347 rv_dist_tb_in3 Valor entrada ponto 3 da tabela de linearização do distribuidor
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 161 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1348 rv_dist_tb_out3 Valor saída ponto 3 da tabela de linearização do distribuidor
1349 rv_dist_tb_in4 Valor entrada ponto 4 da tabela de linearização do distribuidor
1350 rv_dist_tb_out4 Valor saída ponto 4 da tabela de linearização do distribuidor
1351 rv_dist_tb_in5 Valor entrada ponto 5 da tabela de linearização do distribuidor
1352 rv_dist_tb_out5 Valor saída ponto 5 da tabela de linearização do distribuidor
1353 rv_dist_tb_in6 Valor entrada ponto 6 da tabela de linearização do distribuidor
1354 rv_dist_tb_out6 Valor saída ponto 6 da tabela de linearização do distribuidor
1355 rv_dist_tb_in7 Valor entrada ponto 7 da tabela de linearização do distribuidor
1356 rv_dist_tb_out7 Valor saída ponto 7 da tabela de linearização do distribuidor
1357 rv_dist_tb_in8 Valor entrada ponto 8 da tabela de linearização do distribuidor
1358 rv_dist_tb_out8 Valor saída ponto 8 da tabela de linearização do distribuidor
1359 rv_dist_tb_in9 Valor entrada ponto 9 da tabela de linearização do distribuidor
1360 rv_dist_tb_out9 Valor saída ponto 9 da tabela de linearização do distribuidor
1361 rv_dist_tb_in10 Valor entrada ponto 10 da tabela de linearização do distribuidor
1362 rv_dist_tb_out10 Valor saída ponto 10 da tabela de linearização do distribuidor
1363 rv_gap_valv_dis_pos Compensação positiva da folga da válvula do distribuidor
1364 rv_gap_valv_dis_neg Compensação negativa da folga da válvula do distribuidor
1365 rv_rel_area_dis Relação área do cilindro para Abertura / Fechamento do distribuidor
1366 rv_kp_rotor Ganho proporcional do controlador de posição do rotor
1367 rv_ki_rotor Ganho integral do controlador de posição do rotor
1368 rv_rotor_tb_in1 Valor entrada ponto 1 da tabela de interpolação do rotor
1369 rv_rotor_tb_out1 Valor saída ponto 1 da tabela de interpolação do rotor
1370 rv_rotor_tb_in2 Valor entrada ponto 2 da tabela de interpolação do rotor
1371 rv_rotor_tb_out2 Valor saída ponto 2 da tabela de interpolação do rotor
1372 rv_rotor_tb_in3 Valor entrada ponto 3 da tabela de interpolação do rotor
1373 rv_rotor_tb_out3 Valor saída ponto 3 da tabela de interpolação do rotor
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 162 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
1374 rv_rotor_tb_in4 Valor entrada ponto 4 da tabela de interpolação do rotor
1375 rv_rotor_tb_out4 Valor saída ponto 4 da tabela de interpolação do rotor
1376 rv_rotor_tb_in5 Valor entrada ponto 5 da tabela de interpolação do rotor
1377 rv_rotor_tb_out5 Valor saída ponto 5 da tabela de interpolação do rotor
1378 rv_rotor_tb_in6 Valor entrada ponto 6 da tabela de interpolação do rotor
1379 rv_rotor_tb_out6 Valor saída ponto 6 da tabela de interpolação do rotor
1380 rv_rotor_tb_in7 Valor entrada ponto 7 da tabela de interpolação do rotor
1381 rv_rotor_tb_out7 Valor saída ponto 7 da tabela de interpolação do rotor
1382 rv_rotor_tb_in8 Valor entrada ponto 8 da tabela de interpolação do rotor
1383 rv_rotor_tb_out8 Valor saída ponto 8 da tabela de interpolação do rotor
1384 rv_rotor_tb_in9 Valor entrada ponto 9 da tabela de interpolação do rotor
1385 rv_rotor_tb_out9 Valor saída ponto 9 da tabela de interpolação do rotor
1386 rv_rotor_tb_in10 Valor entrada ponto 10 da tabela de interpolação do rotor
1387 rv_rotor_tb_out10 Valor saída ponto 10 da tabela de interpolação do rotor
1388 rv_gap_valv_rotor_pos Compensação positiva da folga da válvula do rotor
1389 rv_gap_valv_rotor_neg Compensação negativa da folga da válvula do rotor
1390 rv_rel_area_rotor Relação área do cilindro para Abertura / Fechamento do rotor
1391 rv_out_rotor_ini Valor inicial da saída de controle da posição do rotor
Tabela 6.3.12: Parâmetros: Regulador de Velocidade
6.3.1 - VARIÁVEIS CAMPOS DE BITS DO TIPO PARÂMETRO
As tabelas abaixo apresentam a função de cada bit das variáveis de status do tipo parâmetro.
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 163 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
Campos de Bits st_par1 (End Modbus 1274)
End Bit Modbus
(dec)Bit Nome do Bit Descrição
20384 0 st_en_seg_mod_ctrl Habilita seguimento de referencia entre modos de controle
20385 1 st_auto_save_par Habilita salvamento automático de parâmetros na memória não volátil
20386 2 st_rt_escorv_all habilita função escorvamento durante toda a operação do regulador, e não só na partida.
20387 3 st_dc_sincr_par_ini habilita sincronismo de parâmetros na inicialização do modo duplo canal
20388 4 st_dc_sincr_log_ini habilita sincronismo dos parâmetros de lógica na inicialização do modo duplo canal
20389 5 st_dc_sincr_par_all habilita sincronismo dos parâmetros durante todo o tempo de operação do regulador em duplo canal
20390 6 reserva
20391 7 reserva
20392 8 reserva
20393 9 reserva
20394 10 reserva
20395 11 reserva
20396 12 reserva
20397 13 reserva
20398 14 reserva
20399 15 reserva
Tabela 6.3.1.1: Campos de Bits Parâmetros: Gerais 1
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 164 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
6.4 - VARIÁVEIS LÓGICA
Estas variáveis são responsáveis pela programação das funções lógicas do equipamento, sendo armazenadas em memória não volátil, ou seja, mesmo que o equipamento seja desenergizado, mantem o seu valor.
Antes de executar a gravação da ´logica, deve-se efetuar a parada da execução da mesma e desabilitar todas as funções de regulação.
A área de memória reservada para lógica inicia no endereço 4097 e termina no endereço 4607. (511 words)
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 165 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 166 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 167 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 168 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 169 de 173
MA
PA
DE
MEM
ÓR
IAM
AP
A D
E M
EMÓ
RIA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
7 - PROCEDIMENTO DE COMISSIONAMENTO
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 170 de 173
PR
OC
EDIM
ENTO
DE
CO
MIS
SIO
NA
MEN
TOP
RO
CED
IMEN
TO D
E C
OM
ISSI
ON
AM
ENTO

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
8 - MANUTENÇÃO PREVENTIVA
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 171 de 173
MA
NU
TEN
ÇÃ
O P
REV
ENTI
VA
MA
NU
TEN
ÇÃ
O P
REV
ENTI
VA

GRTD2000GRTD2000 Revisão 0101 de 09/05/2012
9 - PROBLEMAS, CAUSAS E SOLUÇÕES
Problema Causa Solução
–
–
–
–
–
GRAMEYER Equipamentos Eletrônicos Ltda / GRAMEYER Indústria Eletroeletrônica Ltda. Página 172 de 173
PR
OB
LEM
AS,
CA
USA
S E
SO
LUÇ
ÕES
PR
OB
LEM
AS,
CA
USA
S E
SO
LUÇ
ÕES

1 Depende do modo de operação selecionado para a malha primária2 Depende do modo de operação selecionado para a malha secundária3 Depende do modo de operação manual selecionado
Related Documents











