Operación y Mantenimiento de los Sistemas de Radar Primario 1 INSTITUTO POLITECNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA UNIDAD CULHUACAN “MANTENIMIENTO Y OPERACIÓN DE LOS SISTEMAS DE RADAR PRIMARIO”. PRESENTAN: GONZALEZ PENICHE EDUARDO NUÑEZ MENDOZA GABRIEL RODRIGUEZ JIMENEZ JOSE LUIS

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Operación y Mantenimiento de los Sistemas de Radar Primario
1
INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
UNIDAD CULHUACAN
“MANTENIMIENTO Y OPERACIÓN DE LOS SISTEMAS DE RADAR PRIMARIO”.
PRESENTAN:
GONZALEZ PENICHE EDUARDO NUÑEZ MENDOZA GABRIEL RODRIGUEZ JIMENEZ JOSE LUIS


Operación y Mantenimiento de los Sistemas de Radar Primario
1
INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
UNIDAD CULHUACAN
“MANTENIMIENTO Y OPERACIÓN DE LOS SISTEMAS DE RADAR PRIMARIO”.
PRESENTAN:
GONZALEZ PENICHE EDUARDO NUÑEZ MENDOZA GABRIEL RODRIGUEZ JIMENEZ JOSE LUIS


Operación y Mantenimiento de los Sistemas de Radar Primario
2
Agradecimientos
José Luis Rodríguez Jiménez: Quiero agradecer profundamente a todas las personas que me alentaron y me ayudaron a poder concluir este trabajo; en primer instancia a mi familia Ana, Carolina, Marcel y Bruno a mis amigos y compañeros de trabajo de radar México, a las diferentes Instituciones donde aprendí y puse en practica todos los conocimientos sobre radar y por ultimo a las personas que me ayudaron a desarrollar y corregir los diferentes temas de este trabajo.
Eduardo González Peniche A mi padre que siempre me inculcó que la responsabilidad de terminar lo que se comienza produce grandeza en el ser humano. A mi madre que el día de hoy le doy la satisfacción más grande de que sus desvelos nunca fueron en vano A mi esposa Isabel y a mis hijos Diego Eduardo y Ximena con quienes he compartido mis momentos más felices, siendo este el más grande de todos, y con la confianza de que más vale tarde que nunca. A mis compañeros de SENEAM a quienes les agradezco todas las grandes satisfacciones que se tienen al trabajar en un medio realmente fascinante. Gabriel Núñez Mendoza Agradezco a todas las personas que han estado conmigo durante mi formación, a mis padres y hermanos, a mi esposa y a mi hijo, a la ESIME Culhuacan y a SENEAM, pero sobre todo a Dios por darme la oportunidad de desempeñarme en el área en donde la electrónica y la aviación tienen una maravillosa fusión, lo cual me permite compartir con la comunidad una muestra de lo interesante que resultan ser los sistemas de Radar.. Reciban todos el mas sincero de mis agradecimientos.

Operación y Mantenimiento de los Sistemas de Radar Primario
3
INDICE.
I INTRODUCCION……………………………………………………………………….. 7 II PROLOGO ……………………………………………………………………………… 9 III OBJETIVOS Y METAS…………………………………………………………………. 11 IV NOMENCLATURA……………………………………………………………………… 12 Capitulo 1 GENERALIDADES. 1.1 Definición de Radar. ……………………………………………………………………. 14 1.2 Antecedentes Históricos. ………………………………………………………………. 14 1.3 Tipos de Radar. …………………………………………………………………………. 15 1.4 Nomenclatura Militar del Radar. ………………………………………………………. 17 1.5 Frecuencias utilizadas en Radar. ……………………………………………………... 19 1.6 Campo de Aplicación de los Radares en México. ………………………………….. 22 Capitulo 2 FUNDAMENTOS TEÓRICOS 2.1 Principio de Funcionamiento. …………………………………………………………. 27 2.2 Sistemas de Radar. ……………………………………………………………………. 28 2.3 Naturaleza de la señal emitida. ………………………………………………………. 29 2.4 Ecuación Radar. ………………………………………………………………………… 34 2.5 Propagación de las ondas de radar. ………………………………………………….. 36 2.6 Funcionamiento del radar modulado por pulsos. ………………………………........ 37 2.6.1 Parámetros de transmisión de un radar modulado por pulsos. …………………… 38 2.6.2 Parámetros de recepción de un radar modulado por pulsos. ……………………… 40 2.6.3 La ecuación de radar. ………………………………………………………………….. 42 2.6.4 El umbral de detección. ………………………………………………………………… 43 2.6.5 El ruido en el receptor. …………………………………………………………………. 45 2.6.6 Probabilidad de detección y probabilidad de falsas alarmas. …………………….. 48 2.6.7 La integración de señales. …………………………………………………………….. 50 2.6.8 El ancho de banda. …………………………………………………………………….. 52 2.6.9 Diagrama a bloques de un radar modulado por pulsos. …………………………… 54 2.6.10 Detección de blancos en precedencia de ruido y clutter. ………………………….. 58 2.6.11 Adaptabilidad del radar y dispositivos anticlutter ……………………………………. 59 Capitulo 3 METODOLOGIA DEL MANTENIMIENTO Y OPERACIÓN DE LOS SISTEMAS
DE RADAR PRIMARIO 3.0 Importancia del mantenimiento en los Sistemas de Radar Primario en
México…………………………………………………………………………………. 64 3.1 Mantenimiento Preventivo…………………………………………………………… 64 3.2 Administración del mantenimiento preventivo. …………………………………… 67 3.3 Programas de mantenimiento preventivo….………………………………………. 68 3.3.1 Programa de mantenimiento preventivo diario. .………..…………………………. 69 3.3.2 Programa de mantenimiento preventivo semanal. ……………………..…………. 70 3.3.3 Programa de mantenimiento preventivo mensual al transmisor…………………. 71 3.3.4 Programa de mantenimiento preventivo mensual al receptor…………………. 73 3.3.5 Programa de mantenimiento preventivo mensual a la unidad de seguimiento… 75 3.3.6 Programa de mantenimiento preventivo mensual a sistema de visualización…. 76

Operación y Mantenimiento de los Sistemas de Radar Primario
4
3.3.7 Programa de mantenimiento preventivo semestral del transmisor y receptor. … 77 3.3.8 Programa de mantenimiento preventivo semestral a la antena..………………… 79 3.3.9 Programa de mantenimiento preventivo semestral a la unidad de
seguimiento……………………………………………………………………………. 81 3.3.10 Programa de mantenimiento preventivo semestral a la unidad de
visualización………………………………… 82 3.3.11 Programa de mantenimiento preventivo anual al transmisor y receptor. ……..… 83 3.3.12 Programa de mantenimiento preventivo anual a la antena…..………………….. 85 3.4 Formatos de mantenimiento preventivo. …………………………………………… 87 3.4.1 Formato de mantenimiento preventivo diario……….……….…..………….……… 88 3.4.2 Formato de mantenimiento preventivo semanal……..………..………….………... 89 3.4.3 Formato de mantenimiento preventivo mensual del transmisor……...………...… 92 3.4.4 Formato de mantenimiento preventivo mensual del receptor…………….……… 95 3.4.5 Formato de mantenimiento preventivo mensual de la unidad de visualización .. 96 3.4.6 Formato de mantenimiento preventivo mensual de la unidad de seguimiento…. 97 3.4.7 Formato de mantenimiento preventivo semestral de las unidades de
visualización y seguimiento…………………………………………………………… 100
3.4.8 Formato del mantenimiento preventivo semestral del transmisor…..……..……. 101 3.4.9 Formato del mantenimiento preventivo semestral del receptor………..………… 109 3.4.10 Formato del mantenimiento preventivo semestral de la antena.………..…….… 113 3.4.11 Formato del mantenimiento preventivo anual del transmisor ...….………...….… 115 3.4.12 Formato del mantenimiento preventivo anual de la antena .…..………………… 116 3.5 Procedimientos de Mantenimiento Preventivo. ………….………….…………….. 117 Procedimiento P-01 Medición de frecuencia utilizando ondametro.........…….…..……… 121 Procedimiento P-02 Medición de frecuencia utilizando analizador de espectro..………. 122 Procedimiento P-03 Medición de la envolvente del pulso de RF.........…….…..………… 123 Procedimiento P-04 Medición de potencia pico directa utilizando medidor Analógico… 124 Procedimiento P-05 Medición de potencia pico reflejada utilizando Analógico....……… 125 Procedimiento P-06 Medición de potencia utilizando un analizador de potencia Pico… 126 Procedimiento P-07 Medición de potencia utilizando un medidor de potencia Digital… 128 Procedimiento P-08 Medición de la ganancia………………………......…….…..……….. 130 Procedimiento P-09 Medición de la sensibilidad………………….........…….…..……….. 133 Procedimiento P-10 Medición del ruido térmico……………………......…….…..………… 136 Procedimiento P-11 Medición de la potencia del oscilador local.........…….…..………… 137 Procedimiento P-12 Medición de la potencia del oscilador coherente......…....………… 138 Procedimiento P-13 Medición del control automático de ganancia (AGC)…....………… 139 Procedimiento P-14 Medición del control automático de frecuencia (AFC)…..………… 141 Procedimiento P-15 Medición del tiempo de desionización...……......…….…..………… 143 Procedimiento P-16 Medición del ancho de banda.............................…….…..………… 146 Procedimiento P-17 Verificación de los mapas operativos del procesador de Señal
(P/S)……………………………………………………………………... 149 Procedimiento P-18 Medición del generador de blancos de pruebas......……………..… 150 Procedimiento P-19 Medición de la extracción de plots…………........…………….…..… 151 Procedimiento P-20 Prueba de la protección de sobre corriente en el Transmisor…….. 152 Procedimiento P-21 Medición del amarre de fase del oscilador coherente.…………..… 153 Procedimiento P-22 Medición del combinador de haces…………......…….…..………… 154 Procedimiento P-23 Verificación de la orientación de los blancos radar….…..………… 156

Operación y Mantenimiento de los Sistemas de Radar Primario
5
Procedimiento P-24 Medición del sistema de tierras. ……………………………………... 158 Procedimiento P-25 Prueba Bert. ……………………………………………………………. 160 Procedimiento P-26 Análisis de datos radar. ………………………………………………. 162 3.6 Calendario de Mantenimiento Preventivo. …………………………………………. 163 3.7 Mantenimiento Correctivo. …………………………………………………………… 167 3.8 Estructura para la Operación………………………………………………………… 177 3.9 Lineamientos de Operación. ………………………………………………………… 179 Capitulo 4 LOGISTICA 4. Memoria de estación. ……………………………….………………………………… 182 4.1 Especificaciones Técnicas. ………………………………………………………….. 183 4.2 Estudio del sitio. ……………………………………………………………………….. 189 4.3 Resultados de las pruebas de aceptación en Fabrica (FAT). ……………………. 200 4.4 Resultados de las pruebas de aceptación en sitio (SAT). ………………………… 205 4.5 Detalle de la instalación eléctrica normal y de emergencia. …………………...…. 206 4.6 Pruebas de certificación operativa aeronáutica. …………………………………… 209 4.7 Protocolo de entrega oficial a los operadores. ……………………………………... 213 4.8 Equipo de prueba para realizar los mantenimientos preventivo y correctivo. ….. 216 4.9 Modificaciones, Circulares y Boletines. ……………………………………….......... 217 Capitulo 5 APLICACIÓN EN CAMPO. 5.1 Radar Primario terminal del Aeropuerto de la Ciudad de México D.F. …………. 218 5.1.1 Programa de mantenimiento preventivo mensual al transmisor. ……………....... 219 5.1.2 Formato de parámetros mensual del transmisor. …………………………………. 222 5.1.3 Programa de mantenimiento mensual al receptor. ……………………………….. 226 5.1.4 Formato de parámetros mensual del receptor. ……………………………………. 228 5.1.5 Programa de mantenimiento preventivo semestral al transmisor- receptor. …… 231 5.1.6 Formato de parámetros semestral del transmisor. ……………………………...... 233 5.1.7 Formato de parámetros semestral del receptor. ………………………………...... 240 5.2 Radar de superficie del aeropuerto de la ciudad de México D.F. ……………….. 244 5.2.1 Programa de mantenimiento preventivo mensual al transmisor. ……………....... 245 5.2.2 Formato de parámetros mensual del transmisor. …………………………………. 247 5.2.3 Programa de mantenimiento mensual al receptor y procesador de señal. …….. 249 5.2.4 Formato de parámetros mensuales del receptor y procesador de señal. ……… 251 5.2.5 Programa de mantenimiento preventivo semestral al transmisor y receptor. ….. 252 5.2.6 Formato de parámetros semestral del transmisor y receptor. …………………… 254 5.2.7 Resultados de la aplicación de los programas de mantenimiento. …………....... 255 5.2.8 Mediciones practicas en los equipos de radar. ……………………………………. 262 Capitulo 6 CONCLUSIONES Y PROSPECTIVA. 6.1 Conclusiones. …………………………………………………………………………. 264 6.2 Prospectiva. ………………………………………………………………………….... 266

Operación y Mantenimiento de los Sistemas de Radar Primario
6
Apéndices: A Glosario de Términos.……………………………………………..………………….. 267 B Especificaciones Técnicas …………………………………………………………… 278 C Diagramas a bloques……….…………………………………………………………. 282 Diagrama general de un radar primario. ……………………………………………. 283 Diagrama general de la unidad de radio frecuencia. ……………………………… 284 Diagrama general del transmisor primario. ………………………………………… 285 Diagrama general del receptor de frecuencia intermedia. ……………………….. 286 Diagrama general del procesador de señal. ………………………………………. 287 Diagrama general del extractor/controlador (hardware). …………………………. 288 Funciones lógicas del extractor/controlador (software). ………………………….. 289 Bibliografía………………………………………………………………………………………… 290

Operación y Mantenimiento de los Sistemas de Radar Primario
7
I INTRODUCCIÓN Siendo el equipo de radar primario una radio facilidad de gran importancia para la navegación, el control de transito aéreo, la detección de fenómenos meteorológicos y el guiado de armamento. Es de gran importancia contar con una administración del mantenimiento que proporcione una gran disponibilidad operativa, y que mantenga los parámetros de los equipos que conforman el sistema de radar dentro de los valores establecidos por el fabricante. La administración de la operación y del mantenimiento de los equipos de radar primario nos permite la planeación, organización, integración, dirección y control de las diferentes variables que intervienen en el funcionamiento de los diferentes equipos que conforman el sistema de radar primario, proporcionándonos una herramienta invaluable para mantener funcionando los equipos de una manera optima. Lo anterior, reduce los costos de operación de los equipos de radar, aunado a una alta disponibilidad operativa del Servicio Radar dado que las fabricas quedan distantes de los sitios operativos lo cual dificulta un apoyo logístico rápido y eficiente. Para la elaboración de un modelo de administración eficiente, es necesario tomar en cuenta los siguientes factores: Tecnología de fabricación La filosofía del mantenimiento al sistema de radar primario ha cambiado a lo largo del tiempo dependiendo de los cambios tecnológicos. Por ejemplo en los radares hechos con válvulas al vacío se requería un gran monitoreo y ajuste continuo de los parámetros de los equipos, lo cual disminuyo considerablemente al incorporarse los semiconductores y circuitos digitales a la fabricación de los equipos. Al integrarse las computadoras con circuitos de gran integración, las intervenciones en campo a nivel componente disminuyeron considerablemente, apareciendo el mantenimiento a nivel modulo o tarjeta. Actualmente los sistemas computarizados conectados en red, se incorporan rápidamente al los sistemas de radar. Actualmente la tecnología de fabricación hace que las reparaciones a nivel componente en campo sean muy costosas, por las refacciones (circuitos dedicados), herramienta y los bancos de mantenimiento que se requieren. Por lo anterior es importante contar con un contrato de suministro de refacciones con el fabricante, en caso de daño de alguna tarjeta, módulo o parte eléctrica.
Operación y Mantenimiento de los Sistemas de Radar Primario
8
Apoyo Logístico Es importante considerar las facilidades de mantenimiento proporcionado por el fabricante, estas facilidades permitirán funcionar óptimamente al equipo de radar por un largo tiempo, un ejemplo de estas facilidades es que: el equipo cuente con sus manuales de mantenimiento donde se indiquen los procedimientos de verificación, ajuste, y substitución de las diferentes partes que conforman el sistema de radar, que tenga un equipo de diagnostico integrado (BITE) y un lote de refacciones básico en cada estación o en un almacén central. Personal Técnico Ahora bien el personal técnico encargado de aplicar los programas de mantenimiento preventivo y correctivo en campo deberá estar capacitado a nivel sistema, manejar el instrumental de prueba utilizado en los mantenimientos, así como la interpretación de la información técnica ofrecida por el fabricante.

Operación y Mantenimiento de los Sistemas de Radar Primario
9
II PROLOGO Como marco de referencia del desarrollo y utilización del radar en México, mencionaremos su aplicación en el control de tráfico aéreo. La actividad aeronáutica en nuestro país comenzó en forma regular al concluir la segunda guerra mundial, la necesidad de mantener comunicado el extenso territorio Mexicano de manera rápida y segura, permitieron el crecimiento y aumento de los vuelos de las compañías nacionales Mexicana de Aviación y Aeronaves de México, aunado a la apertura del aeropuerto de la ciudad de México a la llegada de vuelos de aerolíneas extranjeras que conectaban a nuestro país con el resto del mundo. Este incremento en el número de aeronaves que llegaban a nuestro país, particularmente a la Ciudad de México y las características orográficas propias del Valle de México, comenzaron a complicar las operaciones aéreas, a tal grado que algunas de las compañías aéreas extranjeras comenzaron a pagar primas extras a sus tripulaciones para volar a México, ante el argumento de que aterrizar en México era sumamente peligroso. Como resultado de atender esta problemática, el Gobierno acordó la adquisición de dos sistemas de detección radar de la marca Francesa THOMSON-CSF, los cuales fueron instalados uno en las inmediaciones del Valle de México en Cerro Gordo Estado de México, este para la vigilancia y espaciamiento de las aeronaves en aproximación al Valle de México y el otro en el Aeropuerto de la Ciudad de México para separar y coordinar las llegadas y salidas de las aeronaves al aeropuerto. La estructura de estos dos sistemas pioneros en México fue construida con una tecnología que no permitía el adecuado manejo de las condiciones de alta nubosidad, cadenas montañosas, y zonas urbanas de la zona metropolitana del valle de México. Todo esto dificultaba el control de tráfico aéreo dentro de estas áreas mencionadas. Ante tal situación, las fábricas de sistemas de detección radar pusieron sus máximos esfuerzos en tratar de minimizar estos problemas y en condiciones idóneas cancelar la influencia de los blancos no deseados. De esta manera se incorpora en la configuración básica de una estación de detección radar el equipo eliminador de ecos fijos (MTI por sus siglas en inglés). Esta unidad junto con el sistema militar de identificación amigo-enemigo (IFF por sus siglas en inglés) que posteriormente daría origen al sistema radar secundario de vigilancia (SSR por sus siglas en inglés) ayudó de una manera trascendental al control de transito aéreo para poder manejar un mayor flujo de trafico aéreo. El despegue decisivo de las actividades inherentes al control de tránsito aéreo en México, se dio en 1968 con el anuncio de que la Ciudad de México había sido electa como la sede para la realización de los juegos de la XIX Olimpiada de la era moderna. Dicho evento, provocó que tanto las compañías aéreas nacionales y extranjeras, así como las autoridades Mexicanas iniciaran un estudio de la problemática de cómo garantizar la seguridad en las operaciones aeronáuticas, que serían fuertemente incrementadas ante la llegada de las delegaciones de los países participantes a tal justa deportiva, y es así que se comienza con la instalación de varios equipos de radar en los diferentes aeropuertos del país.

Operación y Mantenimiento de los Sistemas de Radar Primario
10
Actualmente el control de tráfico aéreo en México, se proporciona con la ayuda de la red Nacional de radares contando esta con 28 estaciones. Por otro lado, el uso del equipo de radar primario tiene diversas aplicaciones tanto en el campo civil como militar. En lo referente al primero, las aplicaciones más comunes se dan en la navegación, el control de tráfico aéreo, la detección de fenómenos atmosféricos, y el control de tráfico vehicular. Por lo que respecta al ámbito militar, la detección de blancos y el sistema de seguimiento han tomado un papel predominante en el mundo actual. Esto ha ocasionado que las empresas productoras desarrollen sus equipos ofreciendo una gran variedad de características en la logística para el mantenimiento de los equipos que componen los radares primarios. Si consideramos que cada fabricante ofrece determinadas facilidades para efectuar la operación y el mantenimiento, esto complica bastante la unificación de un criterio de mantenimiento que produce que los sistemas puedan ser operados y mantenidos de manera ineficiente. Finalmente concientes de las necesidades cotidianas de mantenimiento de los sistemas de radar, nace la inquietud de dar a conocer a la comunidad técnica, una propuesta de administración de la operación y mantenimiento en función a la experiencia desarrollada a lo largo de varios años de trabajo en diferentes campos de aplicación de los radares primarios, con el objetivo de aplicarla en cualquier sistema de radar primario localizado en nuestro país.

Operación y Mantenimiento de los Sistemas de Radar Primario
11
III OBJETIVOS Y METAS
OBJETIVOS. Crear un modelo de administración de la operación y el mantenimiento de los radares primarios basado en la experiencia desarrollada en campo, con el objetivo de optimizar el funcionamiento y la disponibilidad operativa del servicio radar en las distintas áreas en donde se cuente con un Radar Primario, por ejemplo: en el campo civil a organizaciones, como Empresas propietarias de buques y/o barcos, Empresas de Aviación, Servicios a la Navegación en el Espacio Mexicano, Servicio Meteorológico Nacional y Comisión Nacional del Agua. En el campo militar a la Fuerza Aérea Mexicana y Armada de México. METAS: Sistematizar la aplicación de los Programas de Mantenimiento Preventivo y Correctivo a los radares Primarios modulados por pulsos localizados en la Republica Mexicana, con el fin de garantizar la disponibilidad operativa y la conservación de los parámetros técnicos de los equipos especificados por el fabricante.

Operación y Mantenimiento de los Sistemas de Radar Primario
12
IV NOMENCLATURA
SIMBOLOS Y ABREVIATURAS
AFC Control Automático de frecuencia.
AGC Control Automático de Ganancia.
ATC Control de tráfico aéreo.
BC Conmutador de haces.
BITE Equipo de prueba Integrado.
C/E Extractor de video.
CM Mapa de clutter.
CW Onda continúa.
dB Decibel.
DAP Detector amplitud fase.
FAN Mapa normalizador de falsas alarmas.
FAT Pruebas de aceptación en fabrica.
FH Factor horizontal.
FI Frecuencia intermedia.
FIR Respuesta de impulso finita.
FMCW Onda continúa frecuencia modulada.
FTC Constante de tiempo rápida.
FV Factor vertical.
GHz Giga Hertz = 109 Hz.
Hz Hertz (ciclo/segundo).
IFF Identificación amigo enemigo.
kW Kilo vatios = 103 vatios.
LDM Mapa de baja frecuencia doppler.
MDS Señal mínima discernible.
MHz Mega Hertz = 106 Hz.
ms Mili segundo = 0.001 seg.

Operación y Mantenimiento de los Sistemas de Radar Primario
13
MTI Eliminador de ecos fijos.
ns Nano segundo 10-9 seg.
OL Oscilador local.
PAVG Potencia promedio.
PD Potencia directa
PIF Preamplificador de FI
Pp Potencia pico.
P/N Número de parte.
PPI Pantalla indicadora radar de posición en planta.
PR Potencia reflejada.
P/S Procesador de señal.
RF Radio frecuencia.
RPM Revoluciones por minuto.
RMS Valor eficaz (raíz cuadrático medio)
RX Receptor radar.
SAT Pruebas de aceptación en sitio.
S/N Número de serie.
STALO Oscilador local estabilizado.
STC Control de Sensibilidad en el tiempo.
SSR Radar secundario de vigilancia.
Sy Señal de sincronía.
TP Punto de prueba.
T/R Dispositivo de conmutación transmisión recepción.
TV Televisión.
TTG Generador de señales de prueba.
TX Transmisor radar.
UHF Frecuencia ultra alta.
µs Micro segundo (10-6 seg.).

Operación y Mantenimiento de los Sistemas de Radar Primario
14
CAPITULO 1 GENERALIDADES
1.1 Definición de Radar La palabra Radar procede de su denominación inglesa "Radio Detection and Ranging" que significa posicionamiento y detección por ondas de radio. Esto significa de una manera física, que con el radar podemos detectar objetos, determinando su distancia o rango, su orientación o dirección o acimut, y en algunos casos su elevación. 1.2 Antecedentes Históricos El radar evolucionó con independencia y simultáneamente en varios países durante los años previos a la Segunda Guerra Mundial, los mayores logros fueron conseguidos en Estados Unidos y en Gran Bretaña. En este último país, debido a que sintieron la proximidad de la guerra y que se encontraban en una posición muy vulnerable a los ataques aéreos alemanes dedicaron un gran esfuerzo al desarrollo del radar. En 1936 los ingleses obtuvieron alcances de detección de 90 millas sobre un avión bombardero, esto mediante un radar instalado en tierra que trabajaba a una frecuencia muy baja de 25 Mhz utilizando equipos de radio. Pronto se desarrollaron radares trabajando a frecuencia de 200 Mhz, que ofrecían la exactitud suficiente para conducir a los aviones caza a interceptar al enemigo y que por otra parte al ser de menor tamaño sus antenas podían ser instaladas en barcos e incluso en aviones. Un hito importante fue la invención en 1940 por parte de los ingleses RANDALL y BOOT de la válvula tipo magnetrón que trabajando a una frecuencia de 3 GHz producía una potencia de aproximadamente de 1 kW con un rendimiento 100 veces superior a los dispositivos utilizados hasta entonces para esas frecuencias. De esta forma, las frecuencias de microondas se comenzaron a utilizar en los equipos de radar. Lo que en un principio era un sistema de detección y medida de distancias, pronto se transformo en un medio para detectar objetos (blancos) y medir parámetros relativos a los mismos como: distancia, acimut, elevación, velocidad, tamaño, etc. Cómo realizarlo en una forma óptima se explica en la Teoría del Radar desarrollada en el Capitulo 2 de este trabajo de Tesis.

Operación y Mantenimiento de los Sistemas de Radar Primario
15
1.3 Tipos de Radar 1.3.1 Radares de Exploración Los radares de exploración, se diseñan poniendo especial énfasis en la detección de blancos en una determinada densidad de espacio. Esto no significa que la medida de otros parámetros relativos al blanco no sean importantes, pues de poco serviría conocer la presencia de un blanco sin conocer su distancia y acimut, pero sí es preferible sacrificar en parte la precisión en la medida de estos parámetros y la capacidad de discriminar entre varios blancos con tal de mejorar la capacidad de detectarlos. El diagrama de radiación de la antena suele ser estrecho en orientación, pero si se trata de un radar de exploración de superficie, en elevación es lo suficiente ancho como para que no deje de iluminar la superficie cuando por ejemplo: el barco que lo porte dé balances y cabezadas permitiendo la detección de aeronaves en vuelo bajo. En los radares de exploración aérea, el diagrama de radiación suele tener la forma representada en la figura 1.1 con objeto de aumentar su cobertura sobre blancos cercanos que estén a gran altura.
Figura 1.1 Diagrama de cobertura de un radar de exploración aérea.
Para 1αα ⟨ no hay radiación con el fin de evitar ecos de suelo. Entre 01 βα ⟩ la ganancia de antena es aproximadamente constante.
Para 0βα ⟩ el diagrama sigue una ley cosec 2 α Estos radares trabajan en las bandas de UHF e incluso en la banda S para disminuir las pérdidas por atenuación atmosférica. Normalmente son de alcance medio y las dimensiones de la antena son grandes.

Operación y Mantenimiento de los Sistemas de Radar Primario
16
La energía emitida en cada pulso debe ser grande por lo que su potencia pico es alta y el ancho de pulso es amplio. Además el giro de la antena es lento con el fin de que cada blanco reciba varios pulsos que serán integrados en el receptor. Por último, el período de repetición de pulsos es grande, para que antes de emitir un nuevo pulso, el precedente tenga tiempo de propagarse hasta el máximo alcance previsto, reflejarse en un blanco y regresar de nuevo al radar. 1.3.2 Radares de Seguimiento Corresponden a la denominación "inglesa "tracking radar" y operan de tal forma que permiten apuntar las armas dé defensa antiaérea en la dirección de la posición futura del blanco, suministrando los datos precisos de la posición presente o actual a una computadora, que resuelve el problema balístico- cinemático de la predicción del citado punto futuro. A estos radares no se le asigna más que un solo blanco y tienen en general una antena muy directiva, tanto en acimut como en elevación, que les permite determinar con gran exactitud la dirección del blanco y un sistema muy preciso para la medida de distancia. Las bandas X, Ku, y actualmente también la Ka son las que normalmente se emplean por la buena resolución angular que se consigue con antenas pequeñas, a pesar de que la atenuación atmosférica es considerable y por tanto se obtienen alcances cortos. Los pulsos transmitidos son estrechos, con objeto de tener buena resolución en distancia y puesto que los alcances son cortos, la frecuencia de repetición de pulsos (PRF) es alta. 1.3.3 Radares Ópticos Desde hace muchos años existen telémetros ópticos para la medida de distancias, cuyo principio de funcionamiento es completamente distinto del que se utiliza en radar, pues se efectúa una triangulación tomando como base el propio telémetro. La precisión conseguida fue en principio baja, dado que la base empleada tiene que tener normalmente dimensiones reducidas. La aparición del láser, hizo cambiar sustancialmente esta situación. El principio empleado en los telémetros láser es el mismo que en los radares, la tecnología es por supuesto muy diferente. Así, el emisor puede estar constituido "por una varilla de YAG-Neodimio”, que corresponde una longitud de onda de 1.06 micrómetros (1 micrómetro = 10 4− centímetros). La antena es en este caso, un sistema óptico formado por lentes transparentes a la radiación infrarroja; la resolución angular es enorme (10 4− radianes). El receptor consigue una selectividad por medio de un filtro óptico interferométrico, que elimina el ruido de fondo que acompaña a la señal eco; el receptor propiamente dicho puede ser un foto multiplicador o más modernamente un fotodiodo de avalancha.

Operación y Mantenimiento de los Sistemas de Radar Primario
17
Los radares láser que trabajan en las regiones del infrarrojo, poseen todas las ventajas de una gran resolución angular, gran ancho de banda, y sensibilidad a la frecuencia doppler sin que presenten la gran desventaja que supone la atenuación atmosférica en las regiones submilimétricas. Debido a su mínimo ángulo de apertura, el radar láser no se puede utilizar en misiones de vigilancia, pero es óptimo para la medida de distancias con excepcional precisión 1.4 Nomenclatura Militar del Radar Los equipos electrónicos militares de procedencia americana, se designan por la denominada nomenclatura AN (army-navy) descrita en la "Military Specification MIL-N-18307C" y sus correcciones. Todos los equipos incluido naturalmente el radar, llevan inicialmente las letras AN indicativas de la nomenclatura utilizada, seguidas por una barra y tres letras adicionales apropiadamente seleccionadas que indican:
- Lugar de instalación del equipo o plataforma (avión, misil, tierra, buque, etc.). - Tipo de equipo (radar, contramedidas, radio, etc.).
- Finalidad del equipo (control de armas, perturbador, identificación y reconocimiento, etc.).
En la tabla 1.2 se muestra la tabla de las distintas letras indicadoras. Después de las tres letras y separados por un guión, figuran unos números que son correlativos para cada determinada combinación de letras y diferencian a distintos equipos que responden a dicha combinación. Así la designación AN/APS-40 indica un radar de exploración diseñado para ser instalado en una aeronave y que hace el número cuadragésimo de los que tienen la categoría de APS. Una última letra (A, B, C, etc.) a continuación de la designación original, especifica cada una de las modificaciones efectuadas en el equipo, modificaciones que en ningún caso deben afectar a la totalidad del mismo. En cuanto a los equipos electrónicos que no son de procedencia americana, no es posible concretar normas de identificación, pues el conjunto de letras y números que identifican a cada uno de ellos; son propias de la firma fabricante.

Operación y Mantenimiento de los Sistemas de Radar Primario
18
Tabla 1.2 Sistema de nomenclatura AN.
PRIMERA LETRA
SEGUNDA LETRA
TERCERA LETRA
Plataforma. Tipo de equipo.
Propósito.
A. Aeronave.
A. Infrarrojo.
A. Partes auxiliares.
B. Submarino.
B. TACAN o similar.
B. Bombardero.
C. Transportado en aeronave.
C. Portador alámbrico.
C. Comunicaciones.
D. Vehículo no tripulado.
D. Radiac.
D. Buscador de dirección y/o reconocimiento.
F. Fijo. E. Nupac. E. Eyección. G. Vehículo terrestre cuya única misión es transportar el equipo.
F. Fotográfico.
G. Control de fuego.
K. Anfibio. G. Telégrafo o teletipo.
H. Grabador y /o repro-ductor.
M. Vehículo terrestre multifunción.
I. interfono.
L. Control de iluminación.
P. Animal o persona humana.
J. Electromecánico.
M. Mantenimiento y pruebas.
S. Buque. K. Telémetro. N. Ayudas a la navegación.
T. En tierra, transportable. L. Contramedidas.
P. Reproducción.
U. Utilidad general. M. Meteorológico. Q. Fines especiales o combinación de fines.
V. Vehículo terrestre con otras misiones (por ejemplo el tanque).
P. Radar. R. Receptor, detección pasiva.
W. Buque y submarino. Q. Sonar.
S. Detección de demora y distancia
R. Radio.
T. Transmisor.
S. Tipos especiales.
W. Control.
Operación y Mantenimiento de los Sistemas de Radar Primario
19
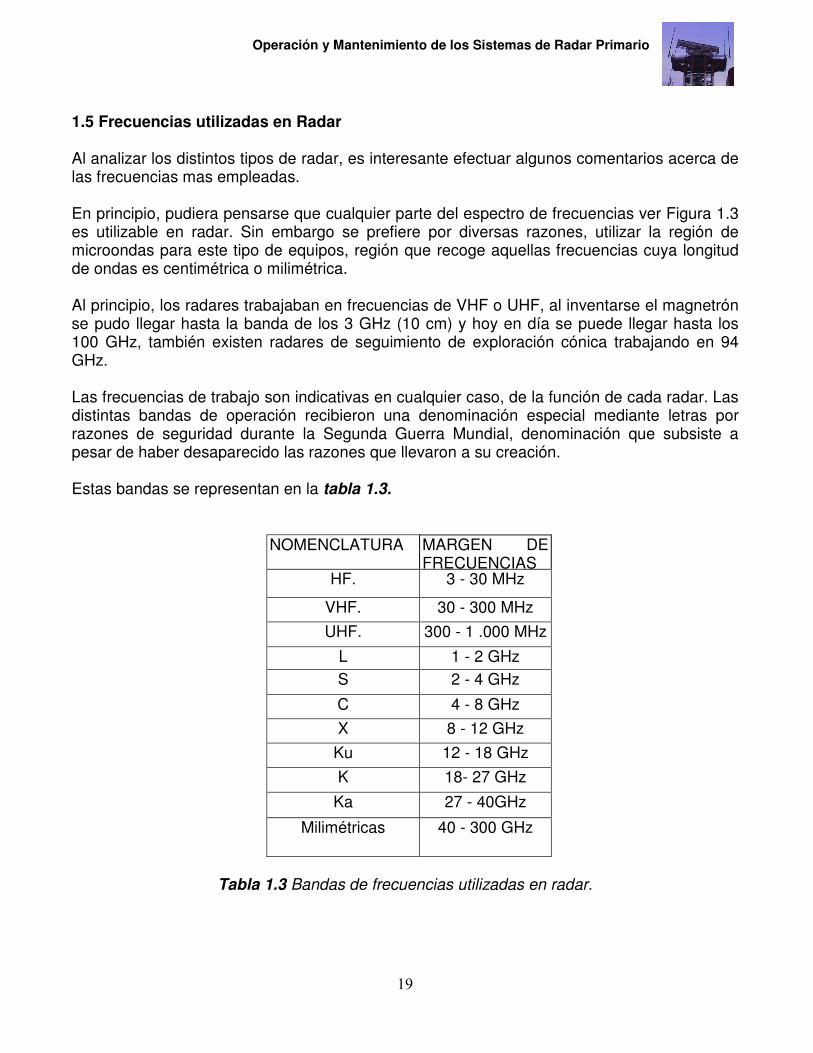
1.5 Frecuencias utilizadas en Radar Al analizar los distintos tipos de radar, es interesante efectuar algunos comentarios acerca de las frecuencias mas empleadas. En principio, pudiera pensarse que cualquier parte del espectro de frecuencias ver Figura 1.3 es utilizable en radar. Sin embargo se prefiere por diversas razones, utilizar la región de microondas para este tipo de equipos, región que recoge aquellas frecuencias cuya longitud de ondas es centimétrica o milimétrica. Al principio, los radares trabajaban en frecuencias de VHF o UHF, al inventarse el magnetrón se pudo llegar hasta la banda de los 3 GHz (10 cm) y hoy en día se puede llegar hasta los 100 GHz, también existen radares de seguimiento de exploración cónica trabajando en 94 GHz. Las frecuencias de trabajo son indicativas en cualquier caso, de la función de cada radar. Las distintas bandas de operación recibieron una denominación especial mediante letras por razones de seguridad durante la Segunda Guerra Mundial, denominación que subsiste a pesar de haber desaparecido las razones que llevaron a su creación. Estas bandas se representan en la tabla 1.3.
NOMENCLATURA
MARGEN DE FRECUENCIAS
HF.
3 - 30 MHz
VHF.
30 - 300 MHz UHF.
300 - 1 .000 MHz
L
1 - 2 GHz S
2 - 4 GHz
C
4 - 8 GHz X
8 - 12 GHz
Ku
12 - 18 GHz K
18- 27 GHz
Ka
27 - 40GHz Milimétricas
40 - 300 GHz
Tabla 1.3 Bandas de frecuencias utilizadas en radar.

Operación y Mantenimiento de los Sistemas de Radar Primario
20
No obstante, la nomenclatura de la tabla 1.3 se reserva hoy en día para equipos comerciales, mientras que los equipos militares utilizan las bandas de frecuencias de contramedidas como se muestra en la tabla 1.4.
Tabla 1.4 Bandas de frecuencias utilizadas en contramedidas.
1.5.1 Frecuencias inferiores a 3 MHz. La ventaja de estas frecuencias vendría de su forma de propagación por medio de onda de superficie, que sigue la curvatura de la tierra. El enorme tamaño de las antenas para conseguir una suficiente directividad, el ruido ambiente presente y el hecho de que estas frecuencias son muy utilizadas en otras aplicaciones no hace atractivo el empleo de estas frecuencias en radar. 1.5.2 Frecuencias de 3 a 30 MHz Los primeros equipos de radar trabajaron a estas frecuencias, debido a la existencia en aquella época de los tubos transmisores de radio. Posteriormente, la aparición de los tubos de alta frecuencia como son: El tipo magnetrón que es un oscilador de alta potencia y alta frecuencia, el tipo Klystrón que es un amplificador de RF, y el tipo TWT (tubo de ondas progresivas) que también es un amplificador de RF, permitieron abandonar estas frecuencias que tienen prácticamente los mismos inconvenientes señalados para las frecuencias inferiores.
NOMENCLATURA
MARGEN DE FRECUENCIAS
A 100 - 250 MHz
B
250 - 500 MHz C
500 - 1.000 MHz
D
1 - 2 MHz E
2 - 3 GHz
F
3 - 4GHz G
4 - 6 GHz
H
6 - 8 GHz I
8 - 10 GHz
J
10 - 20 GHz K
20 - 40GHz
L
40 - 60 GHz M
60 - 100 GHz

Operación y Mantenimiento de los Sistemas de Radar Primario
21
No obstante, presentan interés para ser utilizados en los radares ya que aprovechando la reflexión en la ionosfera, tienen grandes alcances. Se comprende el interés estratégico de estos equipos cuyo alcance no esta limitado por la curvatura de la tierra. 1.5.3 La Banda VHF ( 30 a 300 MHz) En esta banda el ruido ambiente comienza a ser escaso, si bien no tanto como en frecuencias superiores, y por otra parte la atenuación atmosférica es pequeña. Sin embargo, esta zona del espectro esta también saturada y se necesitan grandes antenas para conseguir suficiente resolución angular. Se utiliza en algunos radares de exploración de gran alcance. 1.5.4 La Banda UHF ( 300 a 1000 MHz) Dada la poca atenuación atmosférica de este margen de frecuencias con respecto a las bandas más elevadas, y a la mayor facilidad de construcción de las antenas que proporcionen buena resolución angular con relación a las inferiores, resulta una buena solución de compromiso para los radares de exploración lejana. 1.5.5 La Banda L (1 a 2 GHz) Frecuencias típicas en radares de exploración aérea, debido a que mantiene en cierta medida las ventajas apuntadas para frecuencias inferiores y por no tener los inconvenientes tan acusados. 1.5.6 La Banda S (2 a 3 GHz) La atenuación atmosférica es aún reducida, por lo que pueden obtenerse alcances considerables, y se consiguen haces estrechos con antenas no muy grandes. Es una banda utilizada en radares de exploración de alcance medio y seguimiento lejano, los tamaños de antena son más reducidos, el ruido es asimismo menor y la principal limitación de la sensibilidad viene dada por el propio receptor. 1.5.7 La Banda C (3 a 8 GHz) Esta banda es de transición entre la S y la X y corresponde a soluciones de compromiso entre ambas; permite una cierta discriminación angular con no muy grande atenuación. Suele utilizarse para seguimiento preciso de misiles de blancos a distancias moderadas, en radares de exploración cercana. 1.5.8 La Banda X (8 a 12 GHz) Es una de las bandas mas utilizadas en radar, estando su tecnología muy desarrollada. Las antenas son de tamaño reducido, pudiendo conseguirse una gran directividad, los circuitos de microondas, guías de ondas, etc. son también de tamaño pequeño, lo que resulta de gran importancia en equipos móviles.

Operación y Mantenimiento de los Sistemas de Radar Primario
22
Son frecuencias muy utilizadas en radares de: seguimiento, navegación, altímetros, meteorológicos, control de tráfico, alarmas, detección de intrusos, etc. La atenuación atmosférica es importante, por lo que los alcances son más bien medios o cortos, existen radares que trabajan en esta banda de dimensiones muy pequeñas, utilizando MMIC's (monolithic microwave integrated circuits). 1.5.9 La Banda K (12 a 40 GHz) Estas frecuencias comienzan a utilizarse cada vez más en radares de seguimiento, para la iluminación de misiles aunque su tecnología está aun poco desarrollada. Las antenas pueden ser muy reducidas, pero la atenuación atmosférica es considerable. Presentan una clara ventaja: excelente resolución angular, lo que es de gran utilidad en aplicaciones específicas como el típico problema que se le plantea a la defensa aérea cuando el avión atacante vuela a muy baja altura; en esas condiciones, un radar convencional puede ver simultáneamente dentro de su haz de antena, al avión y su imagen, la antena fluctúa entre los dos "centros brillantes" pudiendo romperse el seguimiento; la utilización de antenas muy directivas (fáciles de realizar en banda K) permite discriminar entre el avión (o misil) y su imagen respecto al suelo. En esta banda se desarrollan también los radares de Superficie para el control del tráfico terrestre en los aeropuertos. 1.6 Campo de Aplicación de los Radares en México 1.6.1 Radar para el Control de Transito Aéreo El sistema de radar Primario (PSR), efectúa la detección de objetos a través de la emisión y reflexión de las ondas electromagnéticas y está destinado al reconocimiento de aeronaves volando en las proximidades de los aeropuertos. A lo largo de las rutas aéreas, la información que proporciona este equipo al personal de control de tránsito aéreo, es de acimut y distancia. Su área de búsqueda, también llamada exploración (scan) de la antena abarca los 360 grados de acimut, su antena montada sobre una base rotatoria, gira a una velocidad aproximada entre 6 y 15 RPM. Estos sistemas también son capaces de detectar fenómenos atmosféricos en 6 niveles de intensidad de lluvia, que van desde sus formaciones iniciales hasta las precipitaciones más intensas, proporcionándole al controlador de tránsito aéreo información en dos niveles: de previsión y de alarma en un radio de 80 millas náuticas de la antena. En México existe una serie de radares primarios destinados al control de transito aéreo, distribuidos en las principales áreas de la republica mexicana tal y como se muestra en la Figura 1.5.

Operación y Mantenimiento de los Sistemas de Radar Primario
23
Figura 1.5 Instalaciones de Radar Terminal. 1.6.2 Radares Meteorológicos El Radar Meteorológico se emplea para la medición y seguimiento de fenómenos atmosféricos constituidos por agua, en forma de lluvia, granizo, y nieve principalmente. La ventaja de un radar meteorológico es equivalente al empleo de cientos de pluviómetros distribuidos a lo largo de la zona de cobertura del radar que transmiten la información en tiempo real. El radar tiene además la posibilidad de realizar estudios de volumen de la nube a diferentes cortes o secciones, así como de dar seguimiento y estudio de fenómenos severos como huracanes. El Radar meteorológico, es sin duda una valiosa herramienta con tecnología de punta con la que cuentan los Meteorólogos para realizar los pronósticos del clima. La Red Nacional de Radares Meteorológicos esta formada por 12 radares, 7 de estos son nuevos con tecnología completamente digital marca ERICSSON con la facilidad de controlarlos remotamente por medio de software que lo automatiza totalmente, los 5 restantes fueron adaptados de tecnología analógica a digital marca EEC, todos están provistos con el sistema Doppler, lo que permite conocer la velocidad y la dirección del blanco.

Operación y Mantenimiento de los Sistemas de Radar Primario
24
Todas las estaciones de Radar se enlazan con el centro colector de datos que se encuentra ubicado en las instalaciones del Servicio Meteorológico Nacional en la ciudad de México, en donde se analiza, se procesa, y se almacena toda la información. La red proporciona una cobertura aproximada del 70% del Territorio Nacional. En la Figura 1.6 se muestra la ubicación de los diferentes radares meteorológicos en México.
Figura 1.6 Radares Meteorológicos en México.
1.6.3 Radares utilizados en los Barcos Los radares marinos se utilizan para la navegación marítima, siendo una importante herramienta para evitar colisiones, detectar tormentas, mar picado, y navegación costera. Gracias a este tipo de radar es posible que embarcaciones de regular y gran tamaño puedan desplazarse de día y noche con la mayor seguridad requerida. Existen una infinidad de compañías que se dedican a la fabricación, instalación y servicio de radares marinos. En las Figuras 1.7,1.8 y1.9 se muestran algunos ejemplos de radares marinos.

Operación y Mantenimiento de los Sistemas de Radar Primario
25
Figuras 1.7,1.8 y 1.9 Ejemplos de radares marinos.
1.6.4 Radares utilizados en las Aeronaves En la actualidad resulta cotidiano saber que existen aeronaves capaces de realizar vuelos interoceánicos, incluso bajo cualquier situación meteorológica, y esto se debe entre otras cosas al uso del radar con el que cuentan las aeronaves, el cual es una importante herramienta para el piloto ya que le indica la presencia de fenómenos atmosféricos para que efectúe un vuelo seguro y eficiente. Las Figuras 1.10 y 1.11 son ejemplos de radares de aeronaves.

Operación y Mantenimiento de los Sistemas de Radar Primario
26
Figura 1.10 Antena del Radar meteorológico ubicado en una aeronave.
Figura 1.11 Monitor del radar meteorológico ubicado en la cabina de la aeronave.

Operación y Mantenimiento de los Sistemas de Radar Primario
27
CAPITULO 2
FUNDAMENTOS TEÓRICOS
2.1 Principios de Funcionamiento Como vimos al principio del capitulo 1, la palabra Radar procede de su denominación inglesa "Radio Detection and Ranging", cuyo significado es posicionamiento y detección por ondas de radio, dicho de otra manera: con el radar podemos detectar objetos, determinando su distancia o rango así como su dirección o acimut y en algunos casos su elevación. A continuación se presenta el principio de funcionamiento del radar. Conocemos por experiencia que cuando realizamos un fuerte sonido, tal como un grito o un disparo de un arma, a menudo escucharemos el eco de ese sonido. Algunas veces, escucharemos varios ecos provenientes del mismo sonido, algunos de estos aparentemente de diferentes direcciones, estos ecos son producto de reflexiones debido a la presencia de edificios, montañas, colinas, y árboles que nos rodean. De las leyes de la física, conocemos que el sonido viaja a una velocidad constante, por lo tanto a esta energía acústica le toma una cierta cantidad de tiempo alcanzar al objeto reflejante y regresar como un eco. Mas aún, estamos en la posibilidad de ubicar la dirección del objeto reflejante, el mismo efecto sucede con las ondas luminosas. Las ondas de radio y de luz son prácticamente de la misma naturaleza, un flujo de energía electromagnética. Solo difiriendo en la frecuencia y por ende en la longitud de onda. De la misma manera, el radar depende de la creación y captación de una señal de radio. El radar envía impulsos de ondas de radio frecuencia (RF), las cuales inciden sobre objetos reflejando la energía hacia la estación radar. Podemos concluir que el funcionamiento del radar depende de tres hechos. a.- La energía de radio frecuencia puede ser reflejada por objetos.
b.- La velocidad de propagación de una onda de radio frecuencia es conocida 3 x 108
m/s. c.- La energía de radio frecuencia puede ser canalizada en un haz altamente direccional.

Operación y Mantenimiento de los Sistemas de Radar Primario
28
2.2 Los Sistemas de Radar En forma elemental, el radar consiste en una antena transmisora direccional que emite en una dirección determinada del espacio la energía electromagnética generada por un transmisor. Una parte de la energía transmitida es interceptada por el blanco y vuelta a radiar en todas las direcciones. La antena receptora, que en la mayoría de los casos es la misma que la transmisora, recoge parte de esa energía y la entrega al receptor. El receptor amplifica la señal, la detecta, y la entrega en forma conveniente a los órganos de explotación de la información, que pueden ser de muy distinta índole según el fin para el cual se diseñe el radar, yendo desde el simple operador humano hasta la computadora más sofisticada. En la figura 2.1 se observa un sistema básico de radar.
Figura 2.1 Esquema básico de un sistema de radar. Mientras la energía radiada suele ser de gran potencia, llegando incluso a algunos megavatios, la recogida por la antena procedente del blanco se llama eco, es de una potencia mucho menor llegándose a conseguir detectar ecos cuya potencia es tan solo de 10-15 vatios. La energía reflejada es llamada eco radar, el objeto reflejante principalmente debido a la influencia militar es llamado blanco (target). La detección de las señales se realiza después de haber sido suficientemente amplificada en el receptor, pero desgraciadamente los ecos no llegan solos, sino que vienen acompañados por:
- Ruido externo debido a fuentes ajenas al propio receptor. - Ruido interno generado en el receptor. -Interferencias producidas por otros transmisores que trabajan en frecuencias próximas.
- Ecos indeseables de lluvia, mar, tierra, etc. Conocidos con el nombre de clutter. El problema que se le plantea al radar, es el de presentar la información necesaria para que se pueda decidir si en la señal recibida hay o no hay eco. Esto no resulta en absoluto sencillo,

Operación y Mantenimiento de los Sistemas de Radar Primario
29
Rx
TIEMPO
y se complica notablemente si al mismo tiempo queremos efectuar mediciones relativas al blanco. Cuando el tiempo requerido por la energía en alcanzar al blanco y regresar es cuidadosamente medido, es posible determinar la distancia del blanco. La dirección la podemos determinar considerando el ángulo entre la posición horizontal de la antena-blanco y una dirección de referencia horizontal. 2.3 Naturaleza de la Señal Emitida De la simple explicación anterior de cómo funciona en forma general un sistema de radar, se desprenden varios problemas a resolver. Por ejemplo el tener un transmisor de gran potencia operando junto al receptor de la misma frecuencia o la medición de la distancia si una señal de onda continúa de frecuencia constante esta siendo transmitida. Existen varios sistemas, los cuales pueden resolver satisfactoriamente los problemas anteriores. Según el tipo de señal emitida se tienen los siguientes sistemas de radar: - Radar modulado por pulsos. - Radar de onda continua (CW). - Radar de frecuencia modulada (FMCW). La mayoría de los radares emiten onda pulsada, sin embargo algunos utilizan onda continua y otros emplean variaciones de estos dos tipos de onda como los de frecuencia modulada onda continua. 2.3.1 Radar Modulado por Pulsos La forma de onda más utilizada es la onda pulsada, formada por una serie de impulsos sucesivos de radiofrecuencia de una potencia prácticamente constante durante toda la duración de cada pulso, y con un intervalo de tiempo determinado entre cada uno y los siguientes pulsos. En este sistema, el transmisor es encendido en periodos cortos de tiempo, y mantenido apagado en periodos largos. Durante el periodo cuando el transmisor es encendido este transmite ráfagas cortas de energía de radio frecuencia (RF). Cuando el transmisor esta apagado, se permite la recepción de blancos, en la figura 2.2 se observa las 2 fases del radar modulado por pulsos, la fase de transmisión (Tx) y la fase de recepción (Rx). Estas dos fases son conocidas como recurrencia radar.
Figura 2.2 Radar modulado por pulsos.

Operación y Mantenimiento de los Sistemas de Radar Primario
30
Rango
Tiempo
Eco es recibidoPulso es transmitido
Pulso transmitido
Blanco
La energía radiada al espacio viaja a través de él. Cuando esta energía encuentra algún objeto, parte de esta energía es reflejada y captada por la antena en donde es canalizada al receptor y enviada a la unidad de visualización. Lo anterior es posible debido a que el transmisor es apagado después de la generación de cada pulso y no interfiere con el receptor. 2.3.1.1 Determinación del Rango o Distancia La mayor parte de los radares miden la distancia al blanco. De hecho ningún otro sensor puede competir con el en la medida de distancias de un blanco lejano. Normalmente se consigue una precisión de algunos cientos de metros, sin embargo, se puede alcanzar una precisión mejor que una fracción de metro. Para poder medir la distancia de un determinado blanco, es necesario transmitir un pulso de radio frecuencia el cual viaja a través de espacio hasta encontrar el objetivo, el cual reflejara parte de esa energía regresando después de un tiempo. Midiendo en una forma precisa este tiempo, se puede determinar fácilmente la distancia del blanco. Esto se observa en la figura 2.3.
Figura 2.3 El rango es determinado por la medición entre el tiempo de transmisión y la recepción del eco del blanco.
La forma normal de medir distancias con el radar, es emitiendo una onda pulsada y midiendo el tiempo transcurrido entre el instante de la emisión de un pulso y el de la recepción del eco correspondiente. Este tiempo, es el que invierte la onda en propagarse hasta el blanco y regresar. De la ley de física general tenemos: Donde: v- velocidad (m/s). d- distancia (m). t- tiempo (s).
t
dv =
(1)

Operación y Mantenimiento de los Sistemas de Radar Primario
31
Elevación
Azimuth
En radar tenemos de (1): d = v.t
Donde: R: es el rango o distancia de un blanco, la distancia total que recorre la
señal de RF es 2R (distancia de ida y vuelta).
C: velocidad de propagación de las ondas de radio igual a la velocidad de la luz 3x108m/s. t: tiempo transcurrido entre la transmisión y la recepción de un blanco (tiempo de ida y vuelta).
De la formula (2), se deduce que a cada microsegundo transcurrido, le corresponden 150 m. De distancia radar. Cuando no se precisa gran exactitud en la distancia al blanco, se mide el retardo entre dos puntos correspondientes de las envueltas de las señales transmitida y recibida, o bien el tiempo transcurrido desde que se emite un pulso hasta que el borde anterior del pulso recibido alcanza un nivel determinado. 2.3.1.2 Determinación de la Dirección Para determinar la dirección de un blanco, debemos considerar la posición horizontal de la línea antena-blanco con respecto a alguna de referencia, esta puede ser el norte magnético, eje de la proa etc. El ángulo de diferencia entre las dos líneas es llamado acimut o dirección del blanco, esto se observa en la figura 2.4. En esta figura se considera que el radar esta montado en un avión. Figura 2.4 Determinación del la dirección y/o acimut.
tCR .2 = tCR .2 =
2
.tCR = (2)

Operación y Mantenimiento de los Sistemas de Radar Primario
32
RADAR
fc
fc + fdR
2.3.2 Radar de Onda Continúa (CW) Los radares de pulsos son usados generalmente donde es necesario detectar blancos dentro de un cierto volumen de espacio y determinar su distancia, dirección, y en algunos la casos la velocidad de cada blanco. Usualmente los sistemas modulados por pulsos, requieren de transmisores de alta potencia, resultando bastante complejos y costosos. Muchas aplicaciones de radar, no requieren toda la información proporcionada por un radar modulado por pulsos. Aplicaciones extremadamente simples, pueden requerir solamente indicar la presencia de un objeto reflejante a una distancia corta, en algunas otras aplicaciones solamente la velocidad del blanco es de interés. En este tipo de aplicaciones se utiliza ampliamente el radar de onda continua (CW). En el radar CW el transmisor transmite continuamente. Ya que la máxima distancia de detección es función de la potencia promedio transmitida (Pavg), los radares de onda continua pueden tener grandes alcances sin tener transmisores de alta potencia por lo cual son más simples y menos costosos. Sin embargo un radar de CW esta imposibilitado a medir distancias, fácilmente puede medir velocidad relativa de un blanco usando el efecto doppler. Este tipo de radar es ampliamente utilizado por la policía para el control de tráfico vehicular, y también en el aspecto deportivo para medir velocidades de tiros. Con frecuencia interesa conocer la velocidad radial del blanco, o al menos distinguir los blancos móviles de los fijos. Ello se consigue a partir de la frecuencia doppler. En la figura 2.5. Se puede apreciar que cuando la onda incidente de frecuencia fc, ilumina un blanco que se desplaza con velocidad radial relativa RV , la frecuencia del eco es fc ± fd siendo la fd. La frecuencia doppler que es:
Figura 2.5 Transmisión y recepción de un radar de onda continúa. Para medir con exactitud la frecuencia doppler, la señal empleada debe ser larga en duración; una onda continua CW es muy adecuada para esos efectos.
λ
Vrfd
2= (3)

Operación y Mantenimiento de los Sistemas de Radar Primario
33
Señal transmitida
Tiempo
Echo del blancoFre
cuen
cia
2.3.3 Radar de Frecuencia Modulada (FMCW) Un radar simple de onda continua CW, transmite continuamente una señal sin variación de frecuencia. Si bien puede existir un desplazamiento en frecuencia debido al efecto doppler (debido al movimiento del blanco). No hay forma de que el radar pueda determinar el tiempo entre la transmisión de un pulso y la recepción de su eco (tiempo de transito). Para que un radar pueda medir el tiempo de transito, es necesario incluir algún tipo de marca en el tiempo que nos sirva como referencia de cuando se efectuó la transmisión y cuando se produjo la recepción del eco. Midiendo este tiempo, se puede determinar fácilmente la distancia de un blanco. Una manera de efectuar esta marca en el tiempo, es modular su amplitud en el radar modulado por pulsos. Otra forma de efectuar una marca en el tiempo es usar la modulación en frecuencia. En un radar de frecuencia modulada FMCW la señal transmitida es continua, pero constantemente cambiando en frecuencia. Debido a que un tiempo finito es requerido por la señal para alcanzar al blanco y regresar, allí existiría una diferencia en la frecuencia instantánea entre la señal de transmisión y la de recepción. Entre más grande sea la distancia del blanco, mayor será diferencia de frecuencia, mezclando la señal de transmisión y recepción se obtiene una frecuencia de batido (∆f). Midiendo la frecuencia de batido, la distancia de un blanco puede ser determinada. Esto se puede observar en la figura 2.6.
Figura 2.6 Radar de frecuencia modulada onda continua (FMCW).

Operación y Mantenimiento de los Sistemas de Radar Primario
34
2.4 La Ecuación del Radar La ecuación del radar relaciona el alcance del radar con las características del transmisor, receptor, antena, blanco, y medio ambiente. Se emplea no solamente para determinar la distancia máxima del radar al blanco, sino que puede servir como una herramienta para comprender mejor la forma de trabajar del equipo de radar y como una base para su diseño. En esta sección se deducirá la forma más simplificada de la ecuación del radar. Sea Pt la potencia de pico media por pulso, entregada a la antena por el transmisor, y consideremos inicialmente que se utiliza una antena isotrópica (la que radia uniformemente en todas las direcciones) sin pérdidas. La densidad de potencia existente a una distancia R del radar, esto es, los vatios por unidad de área, es igual a la potencia transmitida dividida por el área de una esfera imaginaria de radio R.
Densidad de potencia para antena isotrópica= Los radares emplean antenas directivas para canalizar o dirigir la potencia radiada en una dirección determinada. La ganancia de potencia máxima G de una antena, es una medida del aumento de la potencia radiada en dirección al blanco en comparación con la que seria radiada por una antena isotrópica sin perdidas con la misma potencia de entrada procedente del transmisor. La densidad de potencia a la distancia R transmitiendo con una antena G es: Densidad de potencia para antena directiva = El blanco vuelve a irradiar en todas direcciones la energía que incide sobre él de una forma totalmente irregular e imprevisible, debido a su forma física normalmente compleja. Se llama superficie equivalente radar (σ ) de un blanco al área ficticia que intercepta una potencia tal que, se irradia por igual en todas las direcciones produciendo en el radar un eco igual al del blanco. Por tanto se puede suponer que el blanco presenta al radar una superficie (σ ) y que la energía interceptada la vuelve a irradiar isotrópicamente. La potencia irradiada por el blanco será: Potencia irradiada = A la distancia R del blanco, es decir, en el lugar en que esta situada la antena receptora, habrá una densidad de potencia. Densidad de potencia de la señal eco =
24 R
P t
π
GR
Pt•
24 π
σπ
•• GR
Pt24
22 4
1
4 RG
R
pt
πσ
π••
(4)
(5)
(6)
(7)

Operación y Mantenimiento de los Sistemas de Radar Primario
35
La antena del radar captura una parte de la potencia del eco; si llamamos eA al área efectiva
de la antena receptora, la potencia rP recibida por el radar es: La máxima distancia radar maxR es por definición aquella por encima de la cual un blanco determinado no puede ser detectado. Ello ocurre cuando la potencia de la señal eco recibida rP es igual a la mínima señal discernible ( minS ). Por consiguiente: Esta es la forma más sencilla de la ecuación del radar. La teoría de antenas da la siguiente expresión para la ganancia direccional de una antena:
Los radares utilizan normalmente la misma antena tanto para la transmisión como para la recepción, la expresión anterior puede sustituirse en la formula del alcance máximo obteniéndose así otras formas de la ecuación del radar. Si tomamos en cuenta la ecuación (10).
Todas estas versiones simplificadas de la ecuación del radar no describen adecuadamente el comportamiento real del radar.
4
1
min
2max)4(
•••=
S
AGPR et
π
σ
4222 )4(4
1
4Pr
R
AGPA
RR
Pt ete
•
•••=•••=
π
σ
πσ
π
2
4
λ
π eAG =
4
1
min
3
22
max)4(
•••=
S
GPtR
π
σλ
(8)
(9)
(10)
(11)

Operación y Mantenimiento de los Sistemas de Radar Primario
36
Muchos factores de pérdidas importantes que afectan a la distancia radar no se han tenido en cuenta. En la práctica, las máximas distancias reales obtenidas son normalmente menores que las que podrían derivarse de las ecuaciones anteriores. En la sección siguiente, estudiaremos esos factores de pérdidas y cómo influye cada uno de ellos en la diferencia existente entre el alcance teórico y el real. 2.5 La Propagación de las Ondas de Radar La propagación de las ondas radar está afectada por la superficie de la tierra y por su atmósfera. No se puede realizar un análisis completo de la predicción radar si no se tienen en cuenta los fenómenos que surgen en la propagación, debido a que los radares no trabajan en el espacio libre, como se supuso al hacer el estudio de la ecuación del radar. Las características del radar en el espacio libre son modificadas por las causas siguientes:
- Reflexión de la energía radiada en la superficie de la Tierra. - Refracción producida por la falta de homogeneidad de la atmósfera. - Difracción sobre la curvatura de la Tierra. - Atenuación de las ondas electromagnéticas producida-por los gases contenidos en la atmósfera. - Ruido externo que se mezcla con la señal a lo largo de su camino de propagación.
Aunque la teoría básica de la propagación de las ondas radar puede llegar a ser perfectamente comprendida, predecir cuantitativamente con exactitud los efectos que las señales sufren en su camino, no resulta tarea sencilla por la dificultad que presenta la adquisición de los conocimientos necesarios acerca del entorno en el cual el radar trabaja. En algunos casos, predecir los fenómenos de la propagación implica una predicción previa del tiempo atmosférico. No obstante, es importante conocer y entender como los fenómenos de la propagación pueden influir en las prestaciones de un radar y llegar a ser un factor importante a la hora de saber las posibilidades de un equipo para una misión concreta y determinada. A frecuencias superiores a 30 MHz, las ondas electromagnéticas no son reflejadas por la ionosfera, y por otra parte, la onda terrestre se reduce a una amplitud despreciable a distancias del orden de centenares de metros; por todo ello la propagación de las ondas radar se realiza casi exclusivamente por onda espacial.

Operación y Mantenimiento de los Sistemas de Radar Primario
37
1as. 5a, 9a y 10a amónica no se incluyen por la calidad
6a amónica7a8a
Forma de onda resultante de las primeras cuatro armónicas
2a3a4a
Onda resultante de la 6aa la 9a armónica
Onda resultante de las 1asnueve armónicas
Pulso de cuadro deseado
Fig. Composición de una onda rectangular
SalidaR.F.
duracióndel pulso
Fp
tperiodo derepetición
potencia pico promedio
forma de onda de energía
sat.pico
Fig. Características de pulso
1a armónica
2.6 Funcionamiento del Radar Modulado por Pulsos Para que un radar de pulsos trabaje, debe tener circuitos en el transmisor y receptor capaces de reproducir los pulsos, sin introducir ninguna distorsión dañina. Para analizar en un circuito su capacidad para el manejo de pulsos, debemos analizar primero el pulso en si. Cualquier pulso recurrente, puede reproducirse algebraicamente sumando un número grande de ondas sinusoidales con diferentes frecuencias y amplitudes. El método para remplazar un pulso con una serie de ondas sinusoidales se le conoce como análisis de Fourier, la figura 2.7 muestra las formas de onda resultante. Observe que la forma de onda resultante para las primeras cuatro armónicas se aproximan a la de los pulsos deseados, la suma de las siguientes cuatro armónicas hará que la forma de onda resultante se asemeje más estrechamente a los pulsos deseados. Sumando más y más armónicas, la forma de onda resultante hará que se parezca bastante a los pulsos rectangulares. Si pudiéramos sumar apropiadamente un número infinito de armónicas, la forma de la onda resultante sería igual a la de los pulsos rectangulares siendo infinitamente alta la frecuencia de la armónica más alta.
Figura 2.7 Características del pulso de acuerdo al análisis de Fourier.

Operación y Mantenimiento de los Sistemas de Radar Primario
38
Tiempo
T
Tp
f t + 1 / t
f t + 2 / t
f t - 1 / t
f pf t - 2 / t
Frecuencia
El espectro en frecuencia de una onda pulsada infinita en el tiempo, con un ancho de pulso (τ ) y una frecuencia de repetición de pulsos (PRF o fp), es el representado en la figura 2.8. En ella se puede observar que cuanto menor sea el ancho de pulso mas aplanada será la envolvente.
Figura 2.8. Onda pulsada en el dominio de la frecuencia (Espectro). 2.6.1 Parámetros de Transmisión en un Radar Modulado por Pulsos El formato de un radar modulado por pulsos se muestra en la figura 2.9 y es conocida como recurrencia radar.
Figura 2.9 Estructura de onda pulsada en el dominio del tiempo. Frecuencia de transmisión (Ft). Es la frecuencia de la onda electromagnética transmitida y la longitud de onda es λ= C/Ft. Este parámetro afecta al alcance máximo radar, las

Operación y Mantenimiento de los Sistemas de Radar Primario
39
dimensiones de la antena, la reflexión, la atenuación, y la súper refracción de las ondas electromagnéticas. Donde C es la velocidad de la luz, y Ft es la frecuencia de transmisión. Ancho de pulso (τ ). Es el tiempo que dura la transmisión de un pulso, se mide en microsegundos ( µ s). Este parámetro determina las siguientes características del radar: distancia mínima, distancia máxima y resolución axial. Período de repetición de pulsos (Tp. ó PRT). Es el tiempo que transcurre desde que sé inicia la transmisión de un pulso, hasta que se inicia la transmisión del siguiente. Se mide en segundos y cuando es constante entre todos los pulsos a su inversa se le llama frecuencia de repetición de pulsos (fp. ó PRF) que se mide en pulsos por segundo (pps). El rango físico del radar depende de la selección del (PRF), (τ ) y (Pp). Ciclo de trabajo (DC). Esta definido como la relación entre el ancho del pulso de transmisión (τ ) y el periodo de repetición de pulsos (PRT). El ciclo de trabajo es un parámetro muy importante del radar, ya que es utilizado para determinar la potencia promedio después de la definición de la potencia pico así como el rendimiento de la etapa de potencia. Potencia Pico (Pp). La potencia producida durante el pulso recibe el nombre de potencia pico, aclarando que no es la máxima potencia instantánea de la señal sinusoidal. Usualmente la potencia pico es la mitad de la potencia máxima instantánea. Potencia promedio (P AVG). La potencia promedio es la energía del pulso dividida entre el periodo de repetición. Alcance máximo. Es la distancia máxima teórica que puede cubrir el radar. Alcance mínimo. Es la distancia mínima a la cual es posible detectar un blanco. Un pulso corto permite la detección de blancos cercanos al sitio radar. Esto es porque un pulso corto aumenta la capacidad de resolución en rango, porque el tren de ondas moviéndose a la velocidad de la luz (C) ocupa un espacio igual a (C.τ ), por lo tanto dos blancos localizados a una distancia menor a (C. τ /2) no son discriminados.
PRTPRF
1=
PRTDC
τ=
PRTPpPavg
τ=
2
.max
PRTCR =
2
.min
τCR =
(12)
(13)
(14)
(15)
(16)

Operación y Mantenimiento de los Sistemas de Radar Primario
40
Poder separador axial o en eje. Es la distancia mínima a la cual pueden estar separados dos blancos para poder distinguir uno de otro. Velocidad de rotación de la antena (Vr). La selección de la velocidad de la antena es afectada por dos factores los cuales son contrastantes entre ellos. El primero de esos factores consiste en tener una actualización de datos de la posición de los blancos, por lo tanto esto sugiere tener una selección de alta velocidad en revoluciones por minuto (RPM) de la antena. El segundo de esos factores consiste en tener una alta probabilidad de detección, por lo que debemos tener a un PRF constante, un tiempo de iluminación del blanco grande, y seleccionar una baja velocidad de la antena. En la practica la selección del valor optimo de la velocidad de la antena resulta del compromiso entre dos factores, en la practica un tiempo de iluminación que nos proporcione 15 ecos del blanco es bueno. Impactos al blanco. Los impactos al blanco (n) están definidos como el número de emisiones de un radar dentro del tiempo de iluminación del blanco (time on target). Este parámetro esta ligado a la definición de velocidad de rotación: es directamente proporcional al PRF, al ancho de haz de la antena (θ), e inversamente proporcional a la velocidad de rotación de la antena (Vr). Longitud de onda (λ). La longitud de onda afecta la propagación de las ondas radar. La propagación de las ondas radar está afectada por la superficie de la tierra y por su atmósfera. 2.6.2 Parámetros de Recepción El receptor radar tiene por función la de amplificar la señal de regreso captada por la antena. Debe presentar una gran sensibilidad ya que las potencias recibidas son extremadamente débiles del orden de pico vatios. Una descripción a grandes rasgos del receptor radar lo presentaría como un receptor superheterodino clásico. Sin embargo por las características de las señales recibidas, la existencia de señales parásitas intencionadas o no, y la necesidad de extraer distintas informaciones automáticamente, dan lugar a que el receptor del radar se convierta en un conjunto complejo. Comentaremos a continuación las características más importantes del receptor superheterodino: a) Sensibilidad.- Es la capacidad de detectar blancos en presencia de ruidos; la medida de esa capacidad viene dada por la mínima señal discernible, esto es, la mínima amplitud de señal eco que puede ser identificada como tal en presencia de ruido.
2
.τCS =
Vr
PRFn
*6
*θ=
(17)
(18)

Operación y Mantenimiento de los Sistemas de Radar Primario
41
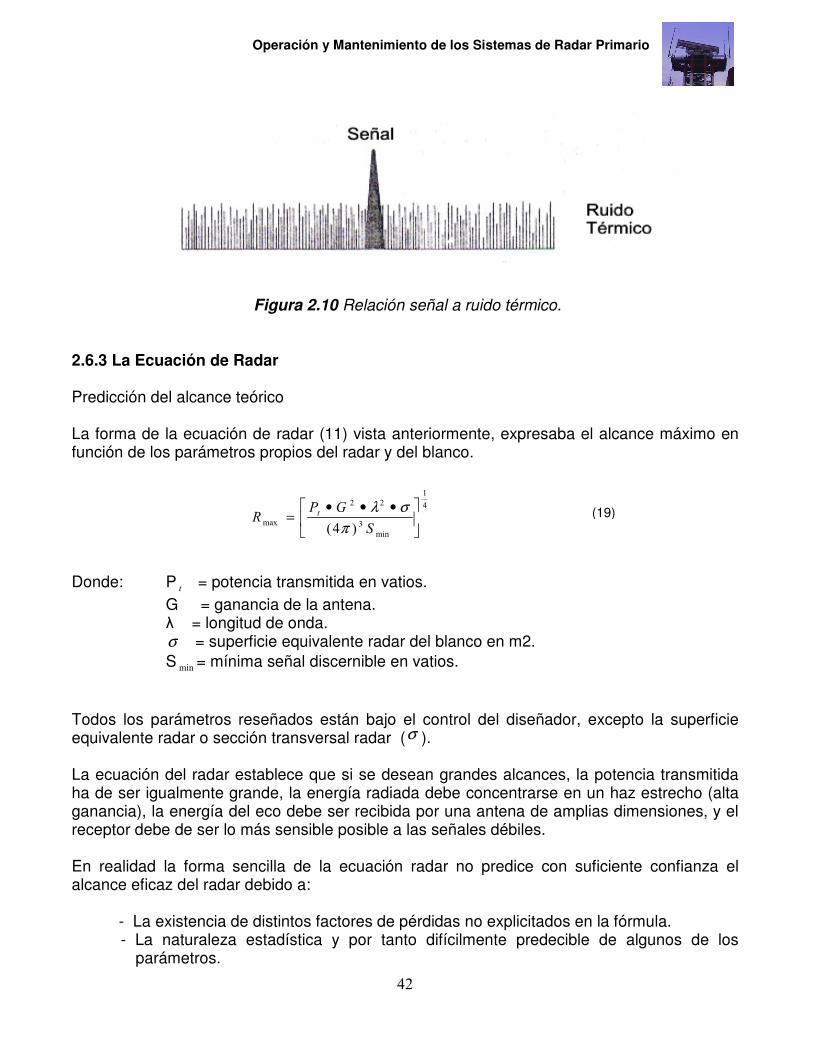
b) Ganancia.- Es el aumento o amplificación que experimenta la señal eco antes de su entrega a la unidad de explotación de la información; la amplificación se puede llevar a cabo a nivel de radio frecuencia, frecuencia intermedia y banda base (video). Y ha de ser tal, que la amplitud de la señal de vídeo entregada a la unidad indicadora sea del orden de decenas de voltios. c) Dinámica.- Es la capacidad del receptor para adaptar sus características a las de las señales de entrada, esto es, la capacidad para detectar ecos tan distintos como los que origina una montaña a corta distancia o un pequeño avión a varios centenares de millas; para conseguir esto, es necesario recurrir a procedimientos muy específicos de la técnica radar tales como la programación de la ganancia con la distancia (STC) o a los amplificadores logarítmicos. En todo caso, debe evitarse la saturación del receptor, pues ello originaria una perdida de sensibilidad durante un tiempo prolongado. Generalmente, pocas cosas son tan importantes como conocer la máxima distancia detectable de blancos en un radar. Los radares de pulsos pueden detectar blancos a varios cientos de millas. Pero como regla, ellos operan a distancias mucho mas cortas debido a obstrucción de la línea de vista. Las ondas de radio usadas por los radares de pulsos pueden penetrar nubes, y no son dispersadas por las partículas suspendidas en las nubes. Ellas no pueden penetrar líquidos o sólidos de una manera profunda, consecuentemente la máxima distancia detectable por un radar es limitada por la línea de vista. Un radar no puede detectar blancos detrás de montañas y blancos que estén a una altitud por abajo del horizonte. Ahora un blanco que este dentro de la cobertura no significa que será detectado, esto depende de situaciones operativas, la señal del blanco puede ser encubierta por señales de blancos no deseados (clutter) como montañas, lluvia, nieve etc. Pero, si un blanco es pequeño o ubicado a una distancia lejana, este eco puede ser encubierto por la presencia de ruido térmico (ruido eléctrico de fondo) lo cual dificulta enormemente su detección ver figura 2.10. En un entorno con condiciones normales (ausencia de clutter), la detección de un blanco depende de su amplitud con respecto al ruido térmico (relación señal- ruido) ver figura 2.10. El ruido térmico es una energía eléctrica de amplitud y frecuencia variable. A la frecuencia que trabajan la mayoría de los sistemas de radar, el ruido térmico es generado en el receptor mismo.
Operación y Mantenimiento de los Sistemas de Radar Primario
42
Figura 2.10 Relación señal a ruido térmico. 2.6.3 La Ecuación de Radar Predicción del alcance teórico La forma de la ecuación de radar (11) vista anteriormente, expresaba el alcance máximo en función de los parámetros propios del radar y del blanco. Donde: P t = potencia transmitida en vatios.
G = ganancia de la antena. λ = longitud de onda. σ = superficie equivalente radar del blanco en m2. S min = mínima señal discernible en vatios.
Todos los parámetros reseñados están bajo el control del diseñador, excepto la superficie equivalente radar o sección transversal radar (σ ). La ecuación del radar establece que si se desean grandes alcances, la potencia transmitida ha de ser igualmente grande, la energía radiada debe concentrarse en un haz estrecho (alta ganancia), la energía del eco debe ser recibida por una antena de amplias dimensiones, y el receptor debe de ser lo más sensible posible a las señales débiles. En realidad la forma sencilla de la ecuación radar no predice con suficiente confianza el alcance eficaz del radar debido a:
- La existencia de distintos factores de pérdidas no explicitados en la fórmula. - La naturaleza estadística y por tanto difícilmente predecible de algunos de los
parámetros.
4
1
min
3
22
max)4(
•••=
S
GPR t
π
σλ
(19)

Operación y Mantenimiento de los Sistemas de Radar Primario
43
Concretamente, tanto la mínima señal discernible S min , como la superficie equivalente radar del blanco (σ ), son de naturaleza estadística y por tanto deben ser expresados en términos estadísticos. Así mismo no hay que olvidar otros factores variables de gran importancia como la influencia que sobre las ondas electromagnéticas tienen las condiciones meteorológicas, o el grado de adiestramiento del operador radar en el supuesto de que dicho operador exista. En este capítulo, vamos a modificar y a completar la ecuación radar incluyendo la mayor parte de los factores importantes que afectan a la distancia de detección. Si todos los factores fueran conocidos, sería posible, en principio, efectuar una predicción absolutamente fiable, pero al no ser así, la calidad de la predicción es función de la cantidad de esfuerzo empleado en determinar los efectos cuantitativos de cada uno de ellos. La señal más débil (S min) a la entrada de un receptor que éste es capaz de detectar, recibe el nombre de "mínima señal discernible" (MDS); el cálculo de su valor no resulta en ocasiones sencillo debido a su naturaleza estadística y a que no existe ningún criterio absolutamente fiable que indique cuando un blanco está o no presente. 2.6.4 El Umbral de Detección El papel del receptor de un radar modulado por pulsos, es producir una señal de video que contenga la indicación de la presencia de blancos dentro de una determinada área. Para su visualización en el indicador de posición en planta (PPI), la señal de video debe ser unipolar. En algunos radares modulados por pulsos, la señal de video unipolar es usada directamente para modular por intensidad un tubo de rayos catódicos. La brillantes de cualquier punto luminoso (spot) en la pantalla depende de la amplitud instantánea de la señal de video. Señales fuertes producen destellos brillantes, mientras señales débiles o ruido producen destellos débiles. Con este tipo de sistema, el operador del radar decide cuando el destello es producido por un blanco, ruido, interferencia o algunos ecos no deseados. La habilidad del operador para detectar con precisión los blancos depende de su entrenamiento, motivación o fatiga. En los modernos sistemas de radar modulados por pulsos, los blancos son detectados automáticamente. Esto puede ser realizado estableciendo un nivel de umbral fijo. Un blanco es considerado que esta presente solamente cuando el voltaje instantáneo de la señal de video recibida excede el umbral. Este proceso es denominado detección por umbral ó detección automática. La figura 2.11 muestra una recurrencia de una señal de video con ruido. Esto es equivalente a un barrido de la pantalla tipo A (ver apéndice A). Debido a la naturaleza aleatoria del ruido, las amplitudes variaran considerablemente de recurrencia a recurrencia. Los picos denominados A, B y C representan cada uno la combinación de una señal de eco con el ruido. El ruido algunas veces aumenta la señal del eco y en otras ocasiones lo disminuye. Los otros picos son debidos solamente al ruido.

Operación y Mantenimiento de los Sistemas de Radar Primario
44
Nivel de detección
Am
plitu
d
Tiempo
Valor rmsdel ruido
A
B C
La detección consiste en distinguir la presencia de una señal entre el ruido que la acompaña, y en consecuencia es una decisión binaria entre dos sucesos: señal ausente (solo ruido) y señal presente (ruido más señal). La detección se realiza a la salida del receptor, una vez amplificada la señal y obtenida su envolvente que tiene una forma fluctuante debido a la naturaleza aleatoria del ruido. En la figura 2.11 representa una forma típica de esta envolvente en función del tiempo.
Figura 2.11 Salida de vídeo de un receptor radar.
El criterio de detección que se va a seguir es suponer que cuando la salida del receptor supera un nivel de umbral llamado "nivel de detección" esta presente un eco, y cuando no lo supera solamente está presente el ruido. Bajo este criterio y de acuerdo con la posición del nivel de detección mostrada en la figura 2.11. Podemos asegurar sin temor a equivocarnos que la señal A corresponde a un blanco. Pero observemos las señales B y C que representan sendos blancos cuyos ecos considerados aisladamente tienen la misma amplitud. En B, la amplitud del ruido es tal que sumada con la del eco permite que la envuelta sobrepase el nivel de detección fijado y por tanto en B apreciamos la presencia de un blanco. En C, por el contrario, el voltaje del ruido es tal que aun sumándole el correspondiente al blanco, la envuelta (eco más ruido) no sobrepasa el nivel y por consiguiente no estamos detectando la presencia de un blanco que realmente existe. Observemos que el ruido algunas veces aumenta el nivel de eco de la señal y algunas veces lo reduce. Parece en principio que hemos colocado el nivel de detección demasiado alto, pero si lo bajamos, ¿cómo podemos estar seguros de que en un momento dado el ruido sea de tal amplitud que por sí solo sobrepase el nivel?; o quizás la señal eco recibida sea tan pequeña que ni aun sumándole el ruido sea capaz de sobrepasar el nivel de detección.

Operación y Mantenimiento de los Sistemas de Radar Primario
45
Durante el barrido mostrado en la figura 2.11 los picos correspondientes a los blancos A y B exceden el umbral de detección. El pico C no rebasa el nivel de detección y no es detectado. Cuando un blanco no es detectado se produce una perdida. Cuando un pico de ruido solo llega a rebasar el umbral de detección se produce una falsa alarma. Falsas alarmas y pérdidas son dos errores que comúnmente se producen cuando el umbral de detección es utilizado. La selección del nivel apropiado es un compromiso entre las dos posibilidades de cometer un error es decir, entre detectar un presunto blanco que no existe o perder un blanco que existe, pero en cualquier caso una señal se detectará mejor cuanto mayor sea, comparada con el ruido. La relación señal-ruido necesaria para proporcionar una detección adecuada, es uno de los parámetros importantes que deben determinarse con objeto de calcular la mínima señal discernible. En caso de que un pico de ruido sobrepase el umbral de detección se generara una falsa alarma. Podemos concluir que la detección puede realizarse de dos formas distintas:
- De forma automática por medio de los circuitos electrónicos adecuados, de acuerdo con el criterio establecido en los párrafos anteriores.
- Por un operador a la vista de la presentación en un Tubo de Rayos Catódicos. En el
caso de que este operador esté adiestrado, la decisión entre presencia o ausencia de eco la realiza estableciendo consciente o inconscientemente un nivel de detección, por lo que todo lo dicho anteriormente es de aplicación.
La capacidad de un radar para detectar una señal eco débil está limitada por la energía del ruido que ocupa la misma parte del espectro en frecuencia que la señal. 2.6.5 El Ruido en el Receptor Debido a que el ruido es el factor más importante que limita la sensibilidad del receptor, es necesario buscar alguna forma de describirlo cuantitativamente. El ruido como ya sabemos es toda energía electromagnética no deseada que dificulta la capacidad de un receptor para detectar una señal deseada. El ruido que entorpece la labor del radar, es aquél cuyo espectro en frecuencia cae dentro del ancho de banda del receptor, puesto que es el que será amplificado junto con la señal. Ese ruido puede tener dos orígenes bien diferenciados:
- Ruido interno, generado en el propio receptor. - Ruido externo, que acompaña siempre a la señal útil cuando entra por la antena.
El ruido externo no se estudiará en este capítulo, pero conviene adelantar que normalmente a frecuencias de microondas es tan pequeño que la sensibilidad del receptor viene limitada fundamentalmente por el ruido interno. Será despreciado por tanto en el presente estudio.

Operación y Mantenimiento de los Sistemas de Radar Primario
46
Antes de entrar en el receptor propiamente dicho, la señal recibida atraviesa una serie de pasos de entrada como son la antena y guías de onda, en las cuales el único ruido que se genera es el ruido térmico producido por la agitación térmica de los electrones en sus elementos resistivos ver figura 2.12.
Figura 2.12 Ruido térmico generado en el receptor. La potencia de ruido térmico entregada por los pasos de entrada al receptor es directamente proporcional a la temperatura y al ancho de banda del receptor. Donde:
Ni= ruido térmico a la entrada
K= constante de Boltzman (1,38• 1023−
julios/°K). T= temperatura absoluta 300 grados Kelvin. B = ancho de banda del ruido en Hz.
El ancho de banda de los receptores superheterodinos, el más comúnmente utilizado en los radares de pulsos, viene aproximadamente dado por el ancho de banda de los amplificadores de frecuencia intermedia (FI). No obstante, el ancho de banda (B) que figura en la expresión (20) correspondiente al ruido térmico, no es el medido entre los puntos de media potencia tomados a 3 dB, sino el llamado "ancho de banda del ruido" cuya determinación implica un conocimiento completo de la respuesta en frecuencia H(f) del amplificador de FI. De cualquier forma, las características de las respuestas en frecuencia de la mayoría de los receptores radar, son de tal naturaleza que el ancho de banda a 3 dB puede usarse como ancho de banda del ruido sin temor a cometer grandes errores. El ruido generado por el receptor tiene muy diversos orígenes que no interesa analizar. Nos limitaremos a medirlo y para ello compararemos la potencia de ruido existente a la salida del receptor real, con la potencia de ruido que existiría a la salida de un receptor ideal que no generase ruido, de iguales características de ganancia y ancho de banda que el receptor real.
BTKi ••=
(20)

Operación y Mantenimiento de los Sistemas de Radar Primario
47
A la relación de ambas potencias de ruido se le denomina cifra de ruido o factor de ruido: Donde:
N 0 = ruido en la salida del receptor.
G a = ganancia del receptor.
T 0 = temperatura de referencia (290°K = 62°F) K = constante de Boltzman. B = ancho de banda. Fn = factor de ruido.
Teniendo en cuenta que: La expresión anterior se transforma en la siguiente: Podemos por tanto, interpretar la cifra de ruido como una medida de la degradación que sufre la relación señal-ruido a su paso por el receptor. De acuerdo con las ecuaciones anteriores, la señal de entrada puede expresarse así: Si la mínima señal discernible S min es el valor de Si correspondiente a la mínima relación señal-ruido en la salida del receptor (So/No) min necesaria para la detección, entonces de la ecuación (21) tenemos: Sustituyendo esta expresión en la ecuación (19) que es la ecuación del radar tenemos. La ecuación (23) es una expresión más completa de la ecuación radar en donde interviene la relación señal-ruido que estudiaremos a continuación. Como ya se ha dicho, al elevar el nivel del umbral de detección se reduce la probabilidad de falsa alarma pero también la
idealreceptorunderuidodepotencia
realreceptorderuidodelpotencia
GBTK
F
a
n ==0
0
BTKyS
SG i
i
a 0
0 ==
00 /
/
S
SF iin =
0
00
SFBTKS
n
i = min000min )/( SFBTKS n=
min000
3
22
max4
)/()4( SFBTK
GPR
n
t
π
σλ •••=
(21)
(22)
(23)

Operación y Mantenimiento de los Sistemas de Radar Primario
48
probabilidad de detección. En la práctica, se fija una (Pfa) admisible, y con ella se fija el nivel de detección. Posteriormente con auxilio de la fig. 2.13, se determina la relación señal-ruido necesaria para que con la Pfa prefijada, se tenga una determinada probabilidad de detectar un blanco determinado. Dicha relación señal-ruido se representa por (S/N) 1 y supone que la detección se realiza con un solo pulso de señal eco. Si en la ecuación del radar se sustituye (S 0 /N 0 ) min por (S / N)1 dará el alcance del radar con unas determinadas Pfa y Pd. 2.6.6 Probabilidad de Detección y Probabilidad de Falsas Alarmas La probabilidad de falsas alarmas (Pfa) es la probabilidad de que el ruido solo exceda el umbral de detección, y que sea erróneamente ubicado como un blanco. La probabilidad de detección (Pd) es la probabilidad de que el nivel de señal más ruido exceda el nivel del umbral de detección y sea detectado. Ya que el umbral de detección afecta a ambas probabilidades, este umbral de detección es seleccionado para hacer un compromiso conveniente entre los dos. La figura 2.13 ilustra el efecto del voltaje del umbral de detección y la Pfa y la Pd Esta figura muestra, que la función de densidad de probabilidad del ruido solo, es del tipo Rayleigh a la salida del detector de envolvente o de magnitud (señal unipolar). Y que la densidad de probabilidad de la señal más ruido es casi del tipo Gauss. El área achurada total a la derecha del umbral de detección normalizado (VT/σi) a la desviación estándar (σi), representa la probabilidad de detección (Pd). La doble área achurada representa la probabilidad de falsas alarmas (Pfa). Figura 2.13 Efecto del voltaje del umbral de detección sobre las probabilidades de detección
y de falsas alarmas.

Operación y Mantenimiento de los Sistemas de Radar Primario
49
10-3
10-4
10-5
10-6
10-7
10-8
10-1
0
10-1
2
0.50
0.40
0.30
0.60
0.20
0.05
0.10
0.70
0.80
0.90
0.95
0.98
0.99
0.995
0.998
0.999
0.9995
0.95
4 6 8 10 12 14 18 20
Probabilidadde falsaalarma
10-4 10-6 10-710-810-9
10-1010-11 10-12
(S/N) , relación señal - ruido, en dB1
Pro
babi
lidad
de
dete
cció
n
10-3
16
Se observa en la figura 2.13 que si (VT / σi) fuera aumentada para reducir la Pfa, la Pd también se reduce. El umbral de detección (VT/σi) debe tener un valor para obtener el mejor compromiso, en muchos casos el operador usara el control de ganancia para manualmente variar la comparación con este umbral de detección y reducir las falsas alarmas o aumentar la detección de blancos. En la figura 2.13 bis ilustra la relación entre la Pd, la Pfa, y la relación señal a ruido (S/N). La ecuación (24) nos representa la ecuación radar de una forma mas completa. Figura 2.13bis Probabilidad de detección en función de la relación señal-ruido (potencias) y
de la Probabilidad de falsas alarmas (Pfa).
)/()4( 0
3
22
max4
SFBTK
GPR
n
t
π
σλ •••= (24)

Operación y Mantenimiento de los Sistemas de Radar Primario
50
Es importante adquirir el concepto de que cuando se conoce el alcance de un radar; los blancos localizados a menor distancia serán detectados y lo que estén a mayor distancia no lo serán, sino que se debe tener en cuenta por una parte la superficie equivalente radar (σ) del blanco, y por otra el concepto de la probabilidad de detección. Normalmente el alcance eficaz de los radares se obtiene para una probabilidad de detección del 50%, que corresponde a una probabilidad de detección media del 81% (Pd a distancias iguales e inferiores al alcance eficaz). Este alcance se suele calcular para diferentes superficies equivalentes radar del blanco. 2.6.7 La Integración de Señales Hasta ahora se ha analizado la detección mediante un solo pulso, pero en realidad se reciben varios pulsos consecutivos, reflejados en un mismo blanco. El número de pulsos (n) que inciden sobre un blanco en cada exploración de la antena (tiempo sobre el blanco) viene dado por: Donde: θ = ancho del haz en el plano horizontal, en grados.
PRF= frecuencia de repetición de pulsos, en Hz. VR = velocidad de giro de antena, en RPM.
n = número de impactos al blanco. Para un radar de exploración típico con los parámetros siguientes:
PRF= 300 Hz θ = 1.5° VR = 5 rpm.
Resulta un número de impactos al blanco (n) de 15 pulsos que inciden sobre un blanco y por tanto son reflejados en cada exploración de la antena. El proceso de sumar todos los pulsos eco para conseguir la detección de un blanco, recibe el nombre de integración. En la práctica se pueden utilizar numerosas técnicas para llevar a cabo dicha integración, siendo característica común a todas ellas la utilización de algún dispositivo de almacenamiento; como una línea de retardo o una memoria de tal forma que las señales recibidas en un momento determinado puedan ser sumadas con las recibidas anteriormente. La simple utilización de un tubo de rayos catódicos como pantalla de presentación, implica un cierto grado de integración, debido a la persistencia de la pantalla.
RV
PRFn
6
•=
θ (25)

Operación y Mantenimiento de los Sistemas de Radar Primario
51
Se ha comprobado asimismo que se origina un proceso de integración en el sistema visual y en la misma mente de los operadores; los laboratorios del Instituto Tecnológico de Massachusett (MIT) han llegado a la conclusión después de numerosos experimentos, que un operador con experiencia tiene un tiempo de integración efectivo superior a varios segundos. La integración puede llevarse a cabo en dos lugares diferentes del receptor:
- Antes del detector (nivel de FI), en cuyo caso recibe el nombre de pre detección o integración coherente.
- Después del detector (nivel vídeo), en cuyo caso se denomina post detección o integración no coherente.
La predetección requiere mantener la fase de la señal eco si se quiere obtener el máximo beneficio del proceso de suma, sumando en fase las señales sucesivas. Como quiera que sea la fase de la señal se destruye en el detector (detector de envuelta), la post detección no requiere el mantenimiento de fase alguna. Si efectuamos una integración coherente sobre (n) pulsos, todos ellos de la misma relación señal-ruido (S/R), la relación señal-ruido después de efectuada la integración será (n) veces la (S/R) de cada uno de los pulsos, suponiendo una integración ideal sin pérdidas de ningún tipo. Por el contrario, si se efectúa una integración no coherente sobre esos (n) pulsos, la S/R resultante será menor debido a las pérdidas en la integración causadas por el carácter no lineal del detector, que convierte una parte de la energía de la señal en ruido. La post detección no es por tanto tan eficaz como la predetección pero es, no obstante, el sistema usualmente utilizado por ser más sencilla su realización práctica. De cualquier forma, un operador entrenado sentado ante una pantalla de presentación convenientemente diseñada, constituye una aproximación bastante cercana al teórico integrador no coherente. Por tanto, cuando se recibe más de un pulso de un blanco, la ecuación del radar queda de la forma siguiente:
Donde:
n = número de pulsos integrados. E i (n) = grado de eficacia de la integración (≤ 1)
(26)
)/()4(
)(
0
3
22
max4
SFBTK
nEnGPR
n
it
π
σλ •••••=
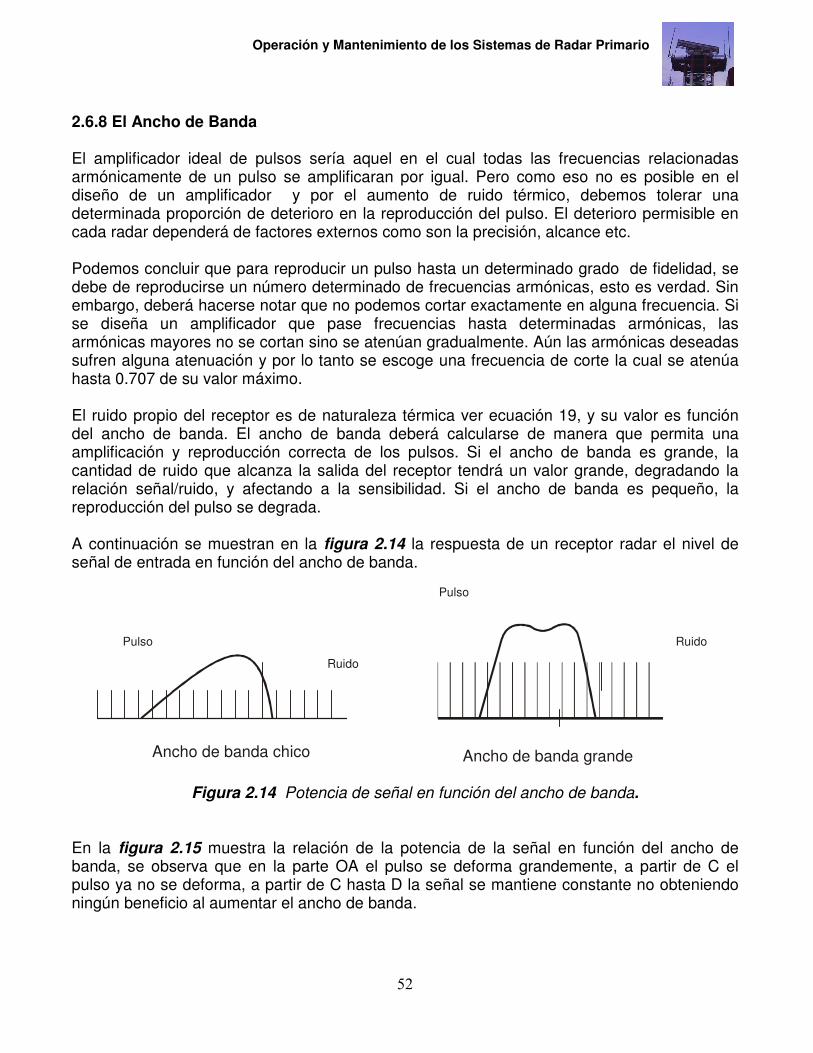
Operación y Mantenimiento de los Sistemas de Radar Primario
52
2.6.8 El Ancho de Banda El amplificador ideal de pulsos sería aquel en el cual todas las frecuencias relacionadas armónicamente de un pulso se amplificaran por igual. Pero como eso no es posible en el diseño de un amplificador y por el aumento de ruido térmico, debemos tolerar una determinada proporción de deterioro en la reproducción del pulso. El deterioro permisible en cada radar dependerá de factores externos como son la precisión, alcance etc. Podemos concluir que para reproducir un pulso hasta un determinado grado de fidelidad, se debe de reproducirse un número determinado de frecuencias armónicas, esto es verdad. Sin embargo, deberá hacerse notar que no podemos cortar exactamente en alguna frecuencia. Si se diseña un amplificador que pase frecuencias hasta determinadas armónicas, las armónicas mayores no se cortan sino se atenúan gradualmente. Aún las armónicas deseadas sufren alguna atenuación y por lo tanto se escoge una frecuencia de corte la cual se atenúa hasta 0.707 de su valor máximo. El ruido propio del receptor es de naturaleza térmica ver ecuación 19, y su valor es función del ancho de banda. El ancho de banda deberá calcularse de manera que permita una amplificación y reproducción correcta de los pulsos. Si el ancho de banda es grande, la cantidad de ruido que alcanza la salida del receptor tendrá un valor grande, degradando la relación señal/ruido, y afectando a la sensibilidad. Si el ancho de banda es pequeño, la reproducción del pulso se degrada. A continuación se muestran en la figura 2.14 la respuesta de un receptor radar el nivel de señal de entrada en función del ancho de banda.
Figura 2.14 Potencia de señal en función del ancho de banda.
En la figura 2.15 muestra la relación de la potencia de la señal en función del ancho de banda, se observa que en la parte OA el pulso se deforma grandemente, a partir de C el pulso ya no se deforma, a partir de C hasta D la señal se mantiene constante no obteniendo ningún beneficio al aumentar el ancho de banda.
Ancho de banda chico Ancho de banda grande
Ruido
Ruido Pulso
Pulso
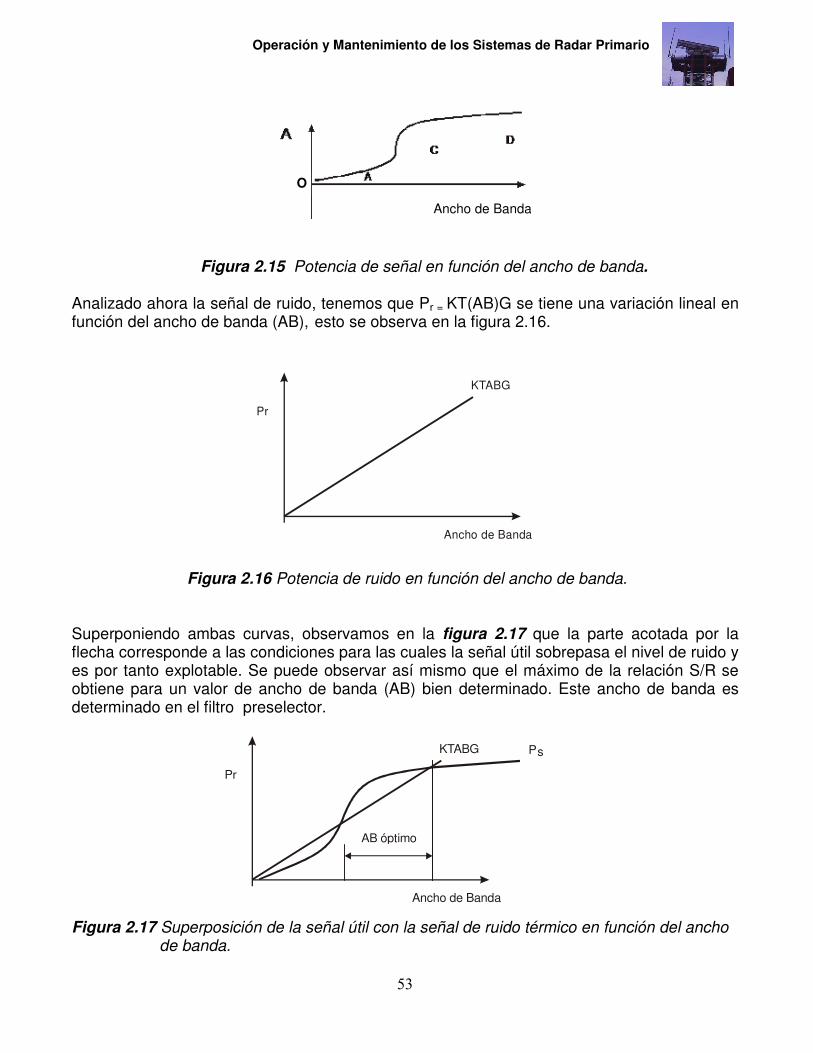
Operación y Mantenimiento de los Sistemas de Radar Primario
53
KTABG
Ancho de Banda
Pr
KTABG
Ancho de Banda
Pr
Ps
AB óptimo
Figura 2.15 Potencia de señal en función del ancho de banda. Analizado ahora la señal de ruido, tenemos que Pr = KT(AB)G se tiene una variación lineal en función del ancho de banda (AB), esto se observa en la figura 2.16. Figura 2.16 Potencia de ruido en función del ancho de banda. Superponiendo ambas curvas, observamos en la figura 2.17 que la parte acotada por la flecha corresponde a las condiciones para las cuales la señal útil sobrepasa el nivel de ruido y es por tanto explotable. Se puede observar así mismo que el máximo de la relación S/R se obtiene para un valor de ancho de banda (AB) bien determinado. Este ancho de banda es determinado en el filtro preselector. Figura 2.17 Superposición de la señal útil con la señal de ruido térmico en función del ancho
de banda.
Ancho de Banda
O

Operación y Mantenimiento de los Sistemas de Radar Primario
54
2.6.9 Diagrama a Bloques de un Radar Modulado por Pulsos Examinemos en el radar clásico de impulsos la función de cada una de sus principales unidades, representadas en el diagrama de bloques de la figura 2.18
Figura 2.18 Radar de impulsos.
Antena
Juntagiratoria
Duplexer
Emisor (Magnetrón) Mezclador X Oscilador
local
Sincronizador Amplificador
F.I.
Alta Tensión
Amplificador Video
Explotación
RECEPTOR
TRANSMISOR
DETECTOR

Operación y Mantenimiento de los Sistemas de Radar Primario
55
2.6.9.1 El Transmisor La parte esencial del transmisor es el tubo de hiperfrecuencia, para un radar de impulsos es clásico el empleo del magnetrón como tal. Modernamente y para los radares de impulsos llamados totalmente coherentes (aquellos que pretenden determinar además de la distancia la frecuencia doppler con objeto de eliminar los ecos no deseados); en tal caso se prefiere emplear osciladores de bajo nivel, generalmente de estado sólido, seguidos por amplificadores de potencia. Este tipo de radar recibe el nombre de amplificador de potencia con oscilador maestro MOPA (master oscíllator - power amplifier). El magnetrón no precisa de amplificador de potencia, pero en los radares M.O.P.A se emplea con este fin un tubo de onda progresiva (TWT) o un Klystron como amplificador, y en la actualidad se están comenzando a utilizar amplificadores de estado sólido. Dentro del transmisor, el sincronizador y el modulador constituyen la parte inteligente del radar. Sincronizador (timer) El sincronizador es el corazón de todos los sistemas de radar. Su función es asegurar que todos los circuitos conectados con el sistema de radar, operen en un tiempo definido, proporcionando la base de tiempo relacionadas al PRT, además de crear todas las señales de sincronismo necesarias tanto para el transmisor como para el receptor. El sincronizador puede estar ubicado en una unidad independiente ó localizada en el transmisor ó receptor. Modulador El modulador es usualmente la fuente de potencia del transmisor. Es controlado por el pulso de sincronía que viene con un período de repetición de pulsos (PRT) o a una frecuencia de repetición de pulsos (PRF), esta señal proviene del sincronizador. El modulador proporciona el ancho de los pulsos transmitidos (τ ) y almacena la energía necesaria para la creación de los impulsos durante los períodos de tiempo en los que el radar no transmite. Etapa de potencia (magnetrón) El magnetrón suministra la energía de radio frecuencia (RF) a una extremadamente alta potencia y frecuencia durante un pulso muy corto. La frecuencia debe ser lo suficientemente alta para tener varios ciclos dentro del pulso. La parte esencial del transmisor es el tubo de hiperfrecuencia. Para un radar de impulsos es clásico el empleo del magnetrón como tubo de hiperfrecuencia. Modernamente y para los radares de impulsos llamados totalmente coherentes, que son aquellos que pretenden determinar además de la distancia la frecuencia doppler con el objeto de eliminar los ecos no deseados. En estos sistemas se prefiere emplear osciladores de bajo nivel, seguidos por amplificadores de potencia de estado sólido.

Operación y Mantenimiento de los Sistemas de Radar Primario
56
Duplexor Este dispositivo realiza la conmutación entre la fase de transmisión y de recepción. Creando un camino del transmisor hacia la antena durante la fase de transmisión, y un camino antena- receptor durante la fase de recepción. Este dispositivo contiene un tubo tipo T/R el cual se ioniza con el pulso de alta potencia durante la fase de transmisión y se des ioniza en la fase de recepción. Junta Giratoria o Rotativa Este dispositivo permite la transferencia de la energía de RF entre la parte fija y la parte móvil de la antena radar. Antena Define la posición en la que se encuentra el blanco, concentrando en esa dirección la energía emitida bajo la forma de los patrones de radiación vertical y horizontal. La información angular se consigue gracias a ella y es aprovechada en la unidad de explotación de la información. Podría pensarse que es necesario disponer de dos antenas, una para emisión y otra para recepción; sin embargo, y gracias al duplexor se puede emplear una única antena para ambas vías. Las antenas de radar son muy costosas, su fabricación delicada y su tamaño depende de la precisión angular que se quiera obtener y de la frecuencia que se va a utilizar. Debido a la alta directividad de las antenas de radar, usualmente deben girar para cubrir un área alrededor de la estación radar. 2.6.9.2 El Receptor Mezclador El mezclador es un dispositivo compuesto por elementos no lineales como lo son los diodos, el cual realizara una translación de radio frecuencia (RF), a una frecuencia más baja conocida como frecuencia intermedia (FI). A la salida del mezclador se tiene una serie de productos y sumas de la señal de entrada de RF y de la señal de referencia del oscilador local (OL), por ejemplo se tendría (RF-OL), (RF+OL), (2 RF), (2 OL) etc. Además el mezclador tiene salida balanceada para tener un bajo factor de ruido. Amplificador de Frecuencia Intermedia (FI) El amplificador de FI estará sintonizado a una de las frecuencias de salida del mezclador, normalmente RF-OL conocida como frecuencia intermedia (FI), esto con un determinado ancho de banda para proporcionar una cierta reproducción de los pulsos y tener un buen rechazo a la señal de ruido térmico, lo anterior nos proporcionara aunada a una determinada ganancia una buena relación S/R, lo que implica tener una buena sensibilidad. Detector El detector de un receptor radar tiene como misión convertir los pulsos de frecuencia intermedia en pulsos de vídeo (se remueve la señal de frecuencia intermedia quedando solamente la envolvente de los pulsos). El detector consiste básicamente de un diodo detector y un filtro pasa bajo.

Operación y Mantenimiento de los Sistemas de Radar Primario
57
Amplificador de video El amplificador de video tiene como objetivo proporcionar una ganancia de acuerdo a las necesidades de las siguientes etapas del receptor radar por ejemplo: el indicador, el procesador de señal etc. Indicador El indicador presenta visualmente toda la información necesaria para ubicar a los diferentes blancos en una pantalla. El método de presentación de la información radar depende del propósito del sitio radar. Ya que el spot explora la pantalla del indicador para presentar la información, el tipo del indicador depende del tipo de exploración. Cuando un eco es recibido, se presenta una intensificación del spot en el tiempo correspondiente de acuerdo a la distancia del blanco y tomando en cuenta la posición del barrido, se obtiene el acimut. En la figura 2.19 se muestra un indicador de presentación en planta denominado PPI ver apéndice A. Figura 2.19 Indicador PPI.

Operación y Mantenimiento de los Sistemas de Radar Primario
58
2.6.10 Detección de Blancos en presencia de Ruido y Clutter Es importante resaltar que en el radar clásico de pulsos explicado anteriormente, se pierde la información de velocidad del blanco por no ocuparse en absoluto de la fase de la señal que entra por la antena. Un radar de este tipo recibe el nombre de radar completamente incoherente por no tener en cuenta la fase de los pulsos de entrada. Si se deseara tener conocimiento de la fase con objeto de conocer la velocidad del blanco o eliminar las señales eco no útiles correspondientes a blancos fijos (clutter). Habría que substituir el detector de envuelta lineal o cuadrático (que elimina toda la información de fase de la señal recibida) utilizado en el radar de impulsos clásico, por un detector de fase o detector coherente en el cual se introduce un segundo oscilador llamado coherente, cuya fase este sincronizada con el transmisor y con el oscilador local. Un radar coherente de tal naturaleza se utiliza en los radares CW y radares MTI. El propósito de un sistema de radar es detectar blancos. Sin embargo decidir si están o no presentes en medio de un ambiente con ruido, interferencia, y otras señales no deseadas (clutter) no es siempre fácil. La decisión debe ser hecha repetidamente ya sea por el operador o por el radar mismo, el resultado no es siempre preciso. Muchas técnicas de procesamiento en adición al indicador de blancos móviles (MTI), son utilizadas para mejorar la precisión de la detección en los radares modernos. La utilización efectiva de esas técnicas requiere un entendimiento del proceso de detección y la familiarización de las características de las señales no deseadas. El ruido, es una energía electromagnética no deseada de amplitud aleatoria y frecuencia aleatoria, la cual interfiere con la detección de las señales deseadas, ya que virtualmente muchas cosas radian ondas de radio, que sin embargo son extremadamente débiles. Existen muchas fuentes de ruido externo al radar, las principales fuentes de esta radiación natural son la tierra, la atmósfera, y el sol. La fuente más importante de ruido sin embargo, es usualmente el mismo receptor del radar. Este ruido es producido por agitación térmica de las partículas atómicas, particularmente los electrones libres en los circuitos del receptor y la potencia de ruido, son proporcionales a la temperatura absoluta. Su espectro de frecuencia se extiende más o menos uniformemente a lo largo del espectro entero de frecuencia. Por esa razón, la potencia de ruido a la salida del receptor es también proporcional al ancho de banda (AB) del receptor. El radar detecta no solo blancos deseados, si no también objetos y fenómenos los cuales son no deseados. Por ejemplo, un radar diseñado para detectar aviones puede también detectar la tierra, vegetación, la superficie del mar, lluvia u otras precipitaciones, insectos, y pájaros. Los regresos (ecos) los cuales son no deseados para la aplicación del radar, se denominan clutter. Por ejemplo los ecos de lluvia podrían ser considerados clutter para un radar de control de tráfico aéreo, pero son considerados como ecos útiles para un radar meteorológico. El clutter es indeseado porque este a menudo obscurece a los blancos deseados.

Operación y Mantenimiento de los Sistemas de Radar Primario
59
Frecuentemente los ecos del clutter son de un nivel muy fuerte que introducen saturación en el receptor o en la pantalla PPI, haciendo a estos insensibles a los blancos útiles sobre una distancia considerable. Los regresos de clutter, están clasificados en tres grupos: Clutter de tierra y vegetación, clutter de mar, y clutter debido a precipitaciones y partículas atmosféricas. Los primeros dos grupos representan un esparcimiento de energía superficial, esto es, las ondas de radar son reflejadas en diferentes direcciones por una superficie y la fuerza del eco es proporcional a el área iluminada por el radar. El tercer grupo es debido a la precipitación y las partículas atmosféricas, estas representan una dispersión volumétrica. Con este tipo de clutter, las reflexiones ocurren a través de un volumen de espacio y la fuerza del eco es proporcional al volumen. Dependiendo de la situación considerada, el clutter de tierra puede ser considerado fijo o móvil. Por ejemplo, la tierra es vista como por un radar estacionario como clutter fijo, pero es visto por un radar de avión como un clutter móvil. La vegetación puede agitarse con el viento o ser percibida por un radar estacionario como un clutter con movimiento lento. El clutter de mar es esencialmente causado por la reflexión de los pulsos del radar en las ondas del mar. Este aparece en la pantalla tipo PPI como una masa confusa de ecos los cuales pueden extenderse de 5 a 7 Km, alrededor del barco. Las ondas del mar son generadas por el viento, por lo tanto la intensidad del clutter del mar es relacionada a la velocidad del viento. Ya que los frentes de las ondas del mar producen ecos fuertes en comparación a los reflejos de los ecos, el clutter de mar no es simétrico alrededor del barco. En la pantalla PPI, el área de clutter mayor es hacia la dirección del viento. Por ejemplo, cuando la dirección del viento es desde estribor, la mayoría del clutter es visto del lado de estribor del barco. Las precipitaciones y partículas atmosféricas absorben y reflejan las ondas del radar. La atenuación o reflexión dependen de la longitud de onda transmitida, de la polarización utilizada, y del tamaño y densidad de las gotas o partículas. Los regresos provenientes de la lluvia que dificultan o obscurecen los blancos útiles son llamados clutter de lluvia. Ya que las frecuencias doppler del clutter de lluvia y mar son relativamente bajas, ellas pueden ser algunas veces eliminadas por el procesador MTI. Usualmente, sin embargo procesamiento adicional es requerido para suprimir tal tipo de clutter y evitar el obscurecimiento de los blancos útiles. 2.6.11 Adaptabilidad del Radar y Dispositivos Anticlutter El principio de adaptabilidad ha sido prácticamente aplicado a los sistemas de radar de tercera generación, esto ha sido posible por la evolución tecnológica en el campo de la electrónica.

Operación y Mantenimiento de los Sistemas de Radar Primario
60
Un radar con adaptabilidad es caracterizado principalmente por los siguientes dos aspectos:
- Capacidad para detectar automáticamente en tiempo real o no, la evolución operacional ambiental en la cual el radar esta operando.
- Adaptabilidad automática a la condición previa, incluyendo la selección de la mejor señal transmitida.
En otras palabras, con la evolución de las condiciones ambientales operativas, el radar es capaz de reaccionar a estas, proporcionando al mismo tiempo una relación constante de falsas alarmas (CFAR) con una máxima probabilidad de detección (Pd). La adaptabilidad del radar puede ser de dos tipos:
- Adaptabilidad estática, esta es requerida para aquellos fenómenos los cuales son prácticamente fijos en el espacio y fluctúan lentamente en el tiempo, por ejemplo el clutter de tierra.
- Adaptabilidad dinámica, esta es requerida para aquellos fenómenos los cuales
cambian rápidamente en el espacio y en el tiempo, y son caracterizados por fluctuaciones en amplitud y frecuencia doppler, por ejemplo el clutter meteorológico conocido como ángeles (clutter con una baja velocidad).
Por lo tanto los radares con adaptabilidad, deben contener un número de dispositivos capaces de detectar la evolución de las condiciones operativas, así como de generar las contramedidas necesarias para reducir los efectos de estas. Para un radar de control de tráfico aéreo (ATC), los factores de degradación son:
- Clutter de tierra. - Clutter meteorológico. - Clutter de ángeles. - Propagación anómala. - Interferencia originada por otros radares.
Los problemas originados por los anteriores fenómenos son contrarestados por los siguientes dispositivos: Para disminuir el efecto del clutter de tierra tenemos los siguientes dispositivos:
- Procesador de Señal (P/S) tipo eliminador de ecos fijos digital (DMTI). y el Procesador de señal tipo detector de blancos móviles adaptivo (AMTD). - Combinador de Haces de antena, que realiza la selección de cobertura alta, media y baja controlado por el Mapa de clutter fijo. - Control de sensibilidad en el tiempo (STC) controlado por el mapa de STC. - Selector entre video normal y video MTI controlado por el Mapa de clutter.

Operación y Mantenimiento de los Sistemas de Radar Primario
61
Para disminuir el efecto del clutter meteorológico tenemos los siguientes dispositivos:
- Polarizador circular o elíptico. - Procesador Log- FTC. - MTI no coherente.
Para disminuir el efecto del clutter de ángeles tenemos los siguientes dispositivos:
- Combinador de Haces de antena (selección de cobertura alta, media y baja). - Normalizador de falsas alarmas controlado por el Mapa FAN.
Para disminuir el efecto originado por la propagación anómala (ecos de segunda recurrencia) y para la interferencia tenemos los siguientes dispositivos:
- Correlacionador de video. - Integrador de ventana deslizante (MWI).
La salida del receptor analógico contiene la señal con los blancos útiles, pero además esa señal viene acompañada por señal de ruido y señal de clutter. Como vimos anteriormente la señal de ruido y la señal de clutter es generada por: - El entorno geográfico y meteorológico que rodea a la estación de Radar. - Inestabilidad del propio equipo de Radar. - Modulación de la antena. - Velocidad de cierto tipo de Clutter. Para poder eliminar este ruido y clutter, es necesario adicionar al receptor analógico una serie de dispositivos que depuren la señal de los blancos útiles, considerando las características de las señales del ruido y clutter como son:
- Amplitud. - Frecuencia.
- Fase. Por lo que al diagrama a bloques de la figura 2.18 del radar básico de impulsos, se le adiciona varios dispositivos y equipos como se muestra en la figura 2.20. En la figura 2.20 se incorpora el combinador de haces con el fin de conmutar de cobertura para atenuar la señal de clutter debido a las montañas y edificios. Esto se realiza a nivel de RF. En el receptor, incorporamos el dispositivo STC el cual atenúa las señales cercanas a la estación radar y amplifica las lejanas, el control automático de ganancia (AGC) mantiene la
Operación y Mantenimiento de los Sistemas de Radar Primario
62
señal y el ruido con una ganancia constante. Así mismo incorporamos un detector amplitud fase, el cual dependiendo de los cambios de fase de las señales tendrá amplitudes diferentes. La salida del receptor la enviamos a un Procesador de Señal (P/S), con el objetivo de suprimir la mayor cantidad de clutter. Este procesador toma en cuenta las características de la señal de clutter, por ejemplo las montañas son consideradas ecos fijos y no tiene ningún cambio de fase en respuestas sucesivas, esto se aprovecha en el los procesadores de señal tipo MTI y AMTD. Su funcionamiento esta basado en filtros digitales FIR. Para compensar las deficiencias de este tipo de Procesadores de Señal (P/S), como son las fases ciegas y las velocidades ciegas (señales con amplitudes iguales), se tiene el canal en fase (I) y el canal en cuadratura (Q) desfasado 90o, así como el extractor de módulo. La señal de los Procesadores de Señal (P/S), es enviada a la parte de detección donde se compara la señal con un umbral de detección variable, almacenado el los diferentes mapas mencionados anteriormente. Cabe hacer mención que este proceso de detección se tiene que realizar con una relación constante de falsas alarmas (CFAR). La salida del dispositivo de detección, es enviada a un extractor de video, con el fin de depurar todos los residuos de cancelación. El extractor de video toma en cuenta el número de impactos al blanco (n) de cada blanco, correlacionando todas las respuestas y generando un reporte único de posición del blanco en coordenadas cartesianas. A este reporte se le conoce como Plot Radar (que es un mensaje de varias palabras, donde se da la posición X, Y, calidad de la información, amplitud etc.). Los métodos más comunes para correlacionar los diferentes impactos al blancos son; el de ventana deslizante, y el mas sofisticado conocido como centro de masa. La señal a la salida del extractor de video es enviada a la unidad de seguimiento (Traking Unit), con el objetivo de primero combinar los plots radar del mismo blanco, obtenidos en algunos casos por diferentes radares. Por ejemplo combinar el Plot del radar primario con el Plot del radar secundario del mismo blanco. Y después esta unidad utiliza la información de la historia de la trayectoria del blanco, para realizar el seguimiento y calculo de la velocidad de los blancos móviles, mientras filtra los reportes no deseados. La salida de esta unidad proporciona la información conocida como Pistas Radar (traks) de los blancos validados, que también son mensajes compuestos de varias palabras. Cuando un proceso de vigilancia es utilizado, cada pista radar es representada por un símbolo asociada a una información alfanumérica que proporciona identificación, altura, velocidad y dirección. En la figura 2.20 se muestra el diagrama a bloques incorporando todos los dispositivos necesarios para obtener las pistas radar.

Operación y Mantenimiento de los Sistemas de Radar Primario
63
Figura 2.20 Diagrama a bloques Completo de un Radar Primario.
Antena
Junta giratoria
Duplexor
Emisor (Magnetrón) Mezclador X
Oscilador local
Modulador Sincronizador Amplificador F.I.
Alta
Tensión
TRANSMISOR
Detector Amplitud Fase
Amp. Bajo Ruido LNA
CF Combinador de haces
DAP
Procesador de Señal
P/S
Extractor Módulo Extractor
de Video
Umbral de Detección
Unidad de Seguimiento
Unidad de visualización
I Q
STC
RECEPTOR
C/E RHP Mapas
Pistas Radar
Plots tracks
AGC

Operación y Mantenimiento de los Sistemas de Radar Primario
64
CAPITULO 3
METODOLOGIA DE LA OPERACIÓN Y EL MANTENIMIENTO DE LOS SISTEMAS DE RADAR PRIMARIO
3.0 Importancia del Mantenimiento de los Sistemas de Radar Primario. El propósito del mantenimiento en los sistemas de radar primario, es el de preservar las características y parámetros de los equipos de una manera optima, disminuyendo de manera significativa la operación incorrecta del Radar. Existen básicamente dos tipos de mantenimientos:
- El mantenimiento preventivo. - El mantenimiento correctivo.
3.1 El Mantenimiento Preventivo El mantenimiento preventivo salvaguarda los parámetros de diseño del equipo tanto como sea posible, realizando programas de mantenimiento, pruebas y ajustes los cuales se deben de realizar periódicamente, siendo parte del objeto de ésta tesis. El mantenimiento preventivo consiste principalmente de:
- Inspecciones, Limpieza y Lubricación. - Sintonía y Calibración. - Verificaciones y Pruebas Funcionales. - Cambio de las partes consumibles, tales como Válvulas y Tubos.
3.1.1 Inspección Mecánica, Limpieza y Lubricación. Es importante, que a través de inspecciones y limpieza de todas las partes a intervalos regulares, se mantenga un control del equipo de radar. Sobre todo, si consideramos que el transmisor trabaja a muy alta potencia, lo cual implica la utilización de altos voltajes. Precaución: Antes de abrir los gabinetes o cubiertas del equipo de radar, asegúrese que la energía primaria este desconectada. Además se deben descargar a tierra los elementos que pueden almacenar energía como lo son los capacitores y bobinas. Todas las partes del equipo de radar, incluyendo áreas bajo ensambles, deben ser inspeccionadas para detectar la presencia de polvo y mugre, indicaciones de sobrecalentamiento, tornillos flojos, y la presencia de cuerpos extraños. Por ejemplo aisladores de voltaje llenos de polvo pueden causar arqueos de corriente; se debe verificar que los dispositivos inmersos en aceite no tengan fugas y substituirlos en caso de localizar alguna.

Operación y Mantenimiento de los Sistemas de Radar Primario
65
Limpieza de Gabinetes. Aunque los gabinetes esta equipados con filtros, es necesario una limpieza para retirar el polvo acumulado. Esto puede ser hecho con una aspiradora de aire, brocha y trapo seco. Los aisladores deben ser limpiados con una franela seca o humedecida con tetracloruro de carbón. Cualquier rastro de polvo o aceite dentro o fuera del gabinete debe ser removido. Rastros de aceite pueden ser debido a fugas provenientes de transformadores, en ese caso el componente en falla debe ser identificado y substituido. Filtros de Aire. Estos deben ser removidos y limpiados para extraer el polvo acumulado mientras el ventilador trabaja. El intervalo de limpieza, depende del número de horas de funcionamiento del ventilador y la cantidad de polvo en el medio ambiente. Un buen criterio para limpiar los filtros es hacerlo cada mes. Si la capa de polvo es delgada, esta puede ser removida con agua a presión, si la capa es gruesa los filtros se deben dejar remojando con solvente por un determinado tiempo. Tarjetas de Circuito Impreso. Las tarjetas no deben tocarse a menos que se presuma que el polvo se ha acumulado en sus superficies. En ese caso deben ser extraídas una a la vez usado la herramienta apropiada. Usando aire a una moderada presión, retirar el polvo acumulado. Si existe grasa o polvo en las patas de los circuitos, utilice alcohol isopropílico para retirar todos esos residuos. Lámparas indicadoras. Las lámparas deben estar perfectamente colocadas en sus receptáculos, libre de corrosión, oxidación y suciedad. Cambie la lámpara cuando su intensidad no sea la adecuada. Fusibles. Las terminales de los fusibles tienden a oxidarse, el oxido y la suciedad aumentan la resistencia. Estas deben ser limpiadas con una franela mojada con tetracloruro. Nota: Los fusibles se deben de retirar de uno en uno de los porta fusibles con el fin de evitar confusiones, además de corroborar el valor impreso con el valor del porta fusible. Cables de Conexión. Estos se deben inspeccionar periódicamente para estar seguros de que no tiene fisuras el aislante. Sustituir los dañados o colocar una cubierta donde se localice el deterioro del aislante. Los cables coaxiales deben ser inspeccionados con especial cuidado ya que estos fácilmente se doblan o maltratan. Los conectores deben ser verificados para estar seguros de que no existe corrosión en los contactos metálicos. Terminales de conexión. Estas deben ser inspeccionadas para estar seguros de que no tienen cables sueltos, polvo acumulado o que estén rozando terminales adyacentes. Las terminales deben estar fuertemente apretadas y limpias. Capacitores. Peligro: Antes de realizar cualquier operación cercana a un capacitor que almacene alto voltaje, es absolutamente necesario corto circuitar las terminales de dicho elemento con un desarmador aislado.

Operación y Mantenimiento de los Sistemas de Radar Primario
66
Nota: Cuando el transmisor es abierto por labores de mantenimiento, todos los elementos que almacenan alto voltaje deben ser aterrizados. Las terminales de los Capacitores no deben tener traza de corrosión u oxidación. Cualquier suciedad debe ser removida de la carcasa metálica. Resistores. Se debe inspeccionar los resistores buscando fisuras, decoloración o quemado. La decoloración muestra que el resistor a sido sobrecargado con corrientes superiores a lo especificado. Transformadores y Bobinas. Se debe inspeccionar las terminales de los transformadores y bobinas. Cualquier traza de polvo o suciedad debe ser removida. Los transformadores sellados, inmersos en aceite deben ser cuidadosamente verificados que no tengan ninguna fuga de aceite. Las carcasas, terminales, y aisladores que están conectados a las terminales de los transformadores y bobinas deben estar libres de polvo y suciedad. Use un trapo seco, si es necesario mójelo con algún tipo de solvente. Partes Mecánicas Móviles. Todas las partes móviles tales como motores, engranes, flechas etc. Deben ser verificadas, limpiadas y lubricadas. Se debe revisar que las partes móviles estén libres de cuerpos extraños, signos de fricción o pérdida de lubricación. Si es necesario se debe realizar la limpieza y lubricación. Confirme que todas las partes tienen movimiento libre, pero no un juego excesivo, indicando un desgaste. Estos conceptos aplican a la caja de engranes de la antena, y control automático de frecuencia. Lubricación de Rodamientos. Se debe de engrasar los rodamientos de la caja de engranes de la antena (ver manual del equipo). Protección de la Antena de Radar. En una atmósfera corrosiva se debe realizar el mantenimiento de limpieza de la antena de la siguiente manera:
- Rociar la antena con agua a presión. - Limpiar el metal con detergente comercial utilizando una esponja. - Retirar los residuos con agua a presión.
Inspección de la Antena de Radar. Verifique fisuras de oxido, así como rastros de pintura descarapelada en los elementos de la antena (reflector, soportes, alimentador etc.).

Operación y Mantenimiento de los Sistemas de Radar Primario
67
3.2 Administración del Mantenimiento Preventivo Concientes de que el Mantenimiento Preventivo es la base fundamental para lograr un funcionamiento óptimo en los Sistemas de Radar Primario. Es importante implementar un sistema de administración del mantenimiento preventivo que garantice la aplicación óptima del mismo, que proporcione el control de los diferentes parámetros de operación y preserve las condiciones de diseño en sitio. La administración del mantenimiento esta compuesta de:
- Programas de Mantenimiento Preventivo. - Formatos de Control. - Procedimientos de Mantenimiento Preventivo. - Calendario de Mantenimiento Preventivo.
Programas de Mantenimiento: Los Programas de Mantenimiento contemplan la planeación y organización de las diferentes actividades técnicas que se deben realizar en los equipos de Radar, están elaborados tomando en cuenta las recomendaciones del fabricante, así como de nuestra experiencia en el campo. Estos programas están estructurados de tal manera que dirigen al personal técnico durante la aplicación de las labores de mantenimiento, proporcionando una metodología de trabajo que considerara las características del equipo, personal técnico y material necesario para efectuar los diferentes programas de mantenimiento. La aplicación sistemática de estos Programas minimiza la posibilidad de la interrupción del servicio de radar y nos permite conocer con precisión el estado operativo de los sistemas. Formatos de Control: Estos formatos, permiten el control al realizar un registro de los diversos parámetros involucrados en el funcionamiento del radar primario, generando un historial del funcionamiento que nos facilita predecir la degradación de alguna parte del sistema. Por lo tanto, es esencial llevar un registro de los valores obtenidos durante la aplicación de los programas de mantenimiento preventivo y compararlos contra los valores de referencia proporcionados por el fabricante. Cualquier diferencia deberá de ser corregida a la brevedad posible de acuerdo a los requerimientos operativos. Procedimientos de Mantenimiento: Los Procedimientos de mantenimiento, nos permiten una integración con el equipo ya que son una serie de instrucciones a seguir para evaluar los parámetros de los diferentes equipos, facilitando las labores de mantenimiento preventivo y correctivo ya que se realizan de una manera práctica y ordenada. Calendario de Mantenimiento: El Calendario de mantenimiento, permite la dirección ya que distribuye adecuadamente los diferentes programas de mantenimiento que se aplicaran durante el año a los distintos equipos que conforman el sistema de radar primario. De esta manera la administración del mantenimiento, se convierte en una herramienta invaluable tanto para la administración, supervisión, y el personal técnico responsables de la aplicación del mantenimiento y del buen funcionamiento de los equipos de radar primario.

Operación y Mantenimiento de los Sistemas de Radar Primario
68
3.3 PROGRAMAS DE MANTENIMIENTO PREVENTIVO

Operación y Mantenimiento de los Sistemas de Radar Primario
69
3.3.1 Programa de Mantenimiento Preventivo Diario
Aplicar al Sistema:
Radar Primario
Descripción de Actividades:
Número Descripción Tiempo 1
- Revisión de las actividades realizadas por el turno anterior en la Bitácora de Mantenimiento.
5 minutos
2
- Revisión del Estado Operativo del Sistema de Radar.
5 minutos
3
- Verificación de la Presentación de los Blancos en Pantalla.
5 minutos
4
- Llenar la hoja de Verificación Diaria de la Estación de Radar (Formato F-01).
5 minutos
5
- Anotar en la Bitácora de Mantenimiento el estado Operativo de los Sistemas y cualquier evento Relevante.
5 minutos
Tiempo Estimado de Ejecución: 25 minutos Material y Equipo de Prueba a Utilizar:
- Terminal Local o Remota. - Pantalla Indicadora de Radar. Personal requerido:
- 1 Especialista en Radar. Documentación: - Formato F-01. Referencias: - Bitácora de Mantenimiento Estado del
Servicio radar durante el Mantenimiento:
- Operativo.
Código de Programa: Rad-01
MANTENIMIENTO PREVENTIVO DIARIO
Vigencia:_______________
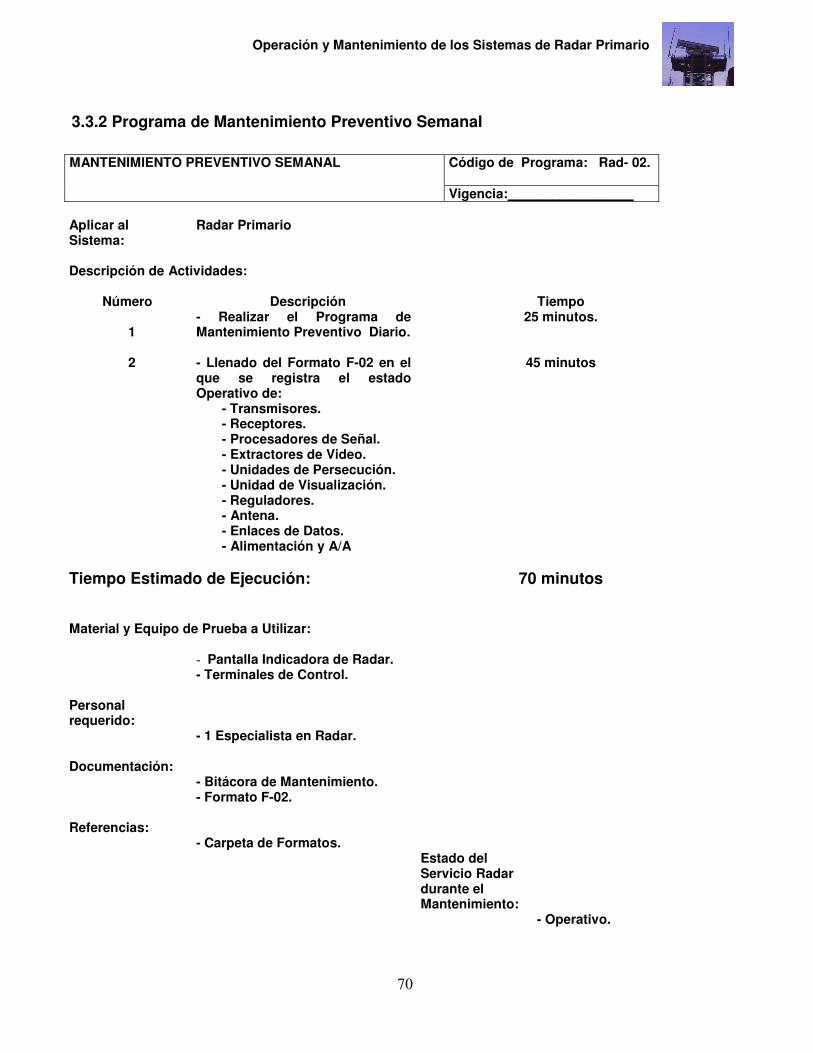
Operación y Mantenimiento de los Sistemas de Radar Primario
70
3.3.2 Programa de Mantenimiento Preventivo Semanal
Aplicar al Sistema:
Radar Primario
Descripción de Actividades:
Número Descripción Tiempo 1
- Realizar el Programa de Mantenimiento Preventivo Diario.
25 minutos.
2 - Llenado del Formato F-02 en el que se registra el estado Operativo de: - Transmisores. - Receptores. - Procesadores de Señal. - Extractores de Video. - Unidades de Persecución. - Unidad de Visualización. - Reguladores. - Antena. - Enlaces de Datos. - Alimentación y A/A
45 minutos
Tiempo Estimado de Ejecución: 70 minutos Material y Equipo de Prueba a Utilizar:
- Pantalla Indicadora de Radar. - Terminales de Control. Personal requerido:
- 1 Especialista en Radar. Documentación: - Bitácora de Mantenimiento. - Formato F-02. Referencias: - Carpeta de Formatos. Estado del
Servicio Radar durante el Mantenimiento:
- Operativo.
Código de Programa: Rad- 02.
MANTENIMIENTO PREVENTIVO SEMANAL
Vigencia:_________________
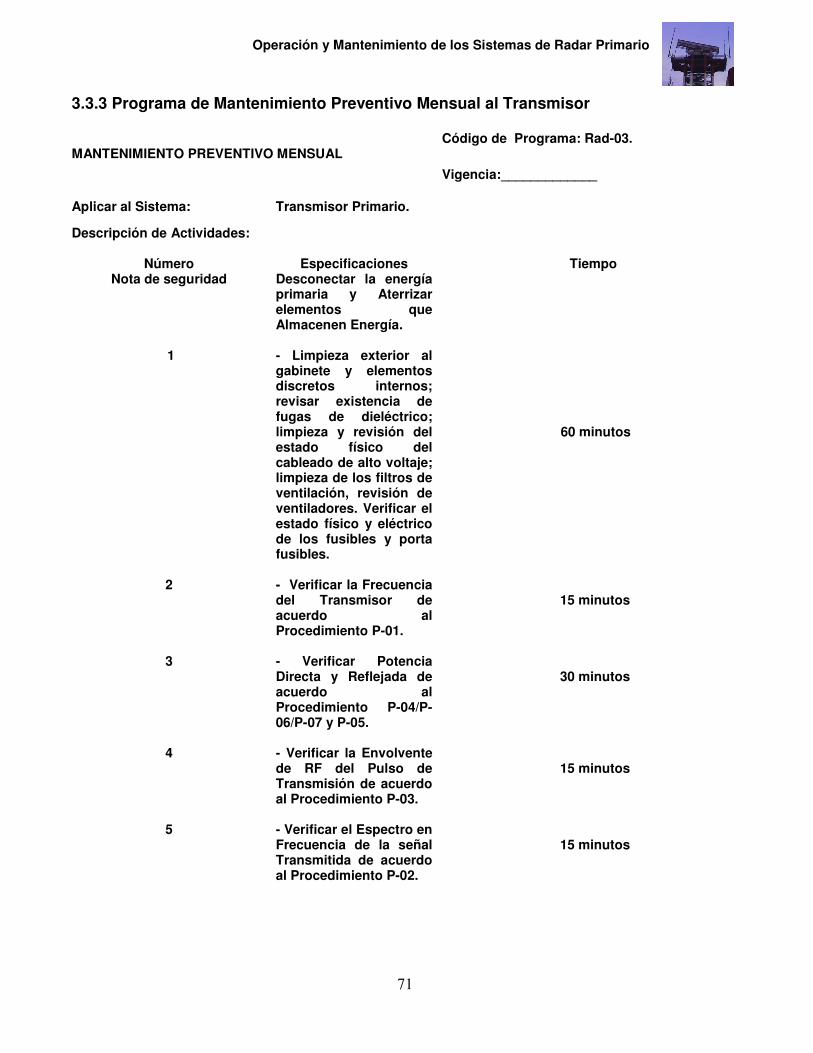
Operación y Mantenimiento de los Sistemas de Radar Primario
71
3.3.3 Programa de Mantenimiento Preventivo Mensual al Transmisor
Código de Programa: Rad-03. MANTENIMIENTO PREVENTIVO MENSUAL
Vigencia:_____________
Aplicar al Sistema: Transmisor Primario.
Descripción de Actividades:
Número Especificaciones Tiempo Nota de seguridad Desconectar la energía
primaria y Aterrizar elementos que Almacenen Energía.
1 - Limpieza exterior al gabinete y elementos discretos internos; revisar existencia de fugas de dieléctrico; limpieza y revisión del estado físico del cableado de alto voltaje; limpieza de los filtros de ventilación, revisión de ventiladores. Verificar el estado físico y eléctrico de los fusibles y porta fusibles.
60 minutos
2 - Verificar la Frecuencia del Transmisor de acuerdo al Procedimiento P-01.
15 minutos
3 - Verificar Potencia Directa y Reflejada de acuerdo al Procedimiento P-04/P-06/P-07 y P-05.
30 minutos
4 - Verificar la Envolvente de RF del Pulso de Transmisión de acuerdo al Procedimiento P-03.
15 minutos
5
- Verificar el Espectro en Frecuencia de la señal Transmitida de acuerdo al Procedimiento P-02.
15 minutos

Operación y Mantenimiento de los Sistemas de Radar Primario
72
6 - Verificar la operación del Control Automático de Frecuencia (CAF) de acuerdo al Procedimiento P-14.
15 minutos
7 - Verificar la señal de Sincronía del Transmisor.
15 minutos
8 - Realizar el llenado del formato F-03.
30 minutos
Tiempo Estimado de Ejecución: 3 horas 15 minutos Material y Equipo de Prueba a Utilizar:
Utensilios de limpieza. - Multímetro.
- Maletín de herramientas. - Analizador de Espectros
y/u Ondámetro.
- Diodo Detector. - Osciloscopio.
- Medidor de Potencia. Personal Requerido: - 2 Especialistas en
Radar.
Documentación:
- Bitácora de Mantenimiento.
- Formato F-03. - Procedimiento P-01. - Procedimiento P-02. - Procedimiento P-03. - Procedimiento P-04. - Procedimiento P-05. Referencias: - Memoria de Estación. - Manual Técnico del
Transmisor.
Estado del
Servicio Radar durante el Mantenimiento:
.
- Operativo

Operación y Mantenimiento de los Sistemas de Radar Primario
73
3.3.4 Programa de Mantenimiento Preventivo Mensual al Receptor
Aplicar al Sistema:
Receptor Primario
Descripción de Actividades:
Número Descripción Tiempo 1 - Desconecte la energía primaria
y efectúe la limpieza exterior al gabinete; partes internas; fuentes de voltaje, tarjetas de regulación, ventiladores y filtros.
30 minutos
2 - Verificar los voltajes de las Fuentes de Alimentación.
15 minutos
3 - Realizar la medición de los niveles de Ruido Térmico, de acuerdo al procedimiento P-10.
y P-13.
15 minutos
4 - Realizar la medición de la Sensibilidad Tangencial (MDS) de acuerdo al Procedimiento P9.
30 minutos
5 - Verificar la presencia en el monitor del Símbolo de los blancos de prueba de acuerdo al Procedimiento P-18 y P-19.
15 minutos
6 - Verificar en el monitor la presencia de Mapas Operativos del P/S de acuerdo al Procedimiento P-17.
30 minutos
7 - Realizar el llenado del Formato F-04.
15 minutos
Tiempo Estimado de Ejecución: 2 horas 30 minutos
Código: Rad-04. MANTENIMIENTO PREVENTIVO MENSUAL
Vigencia: _________

Operación y Mantenimiento de los Sistemas de Radar Primario
74
Material y Equipo de Prueba a Utilizar:
- Utensilios de Limpieza. - Voltímetro RMS. - Osciloscopio. - Generador de RF.
- Maletín de Herramienta.
- Carga de 75 Ώ.
- Atenuadores de 30 dB. - Cable para RF tipo “N” de 5 m.
Personal Técnico Requerido:
- 2 Especialistas en Radar. Documentación: - Formato F-04. - Procedimiento P-09. - Procedimiento P-10. - Procedimiento P-17 Referencias: - Memoria de Estación. - Manual Técnico del Receptor. Estado del
Servicio radar durante el Mantenimiento:
- Operativo.
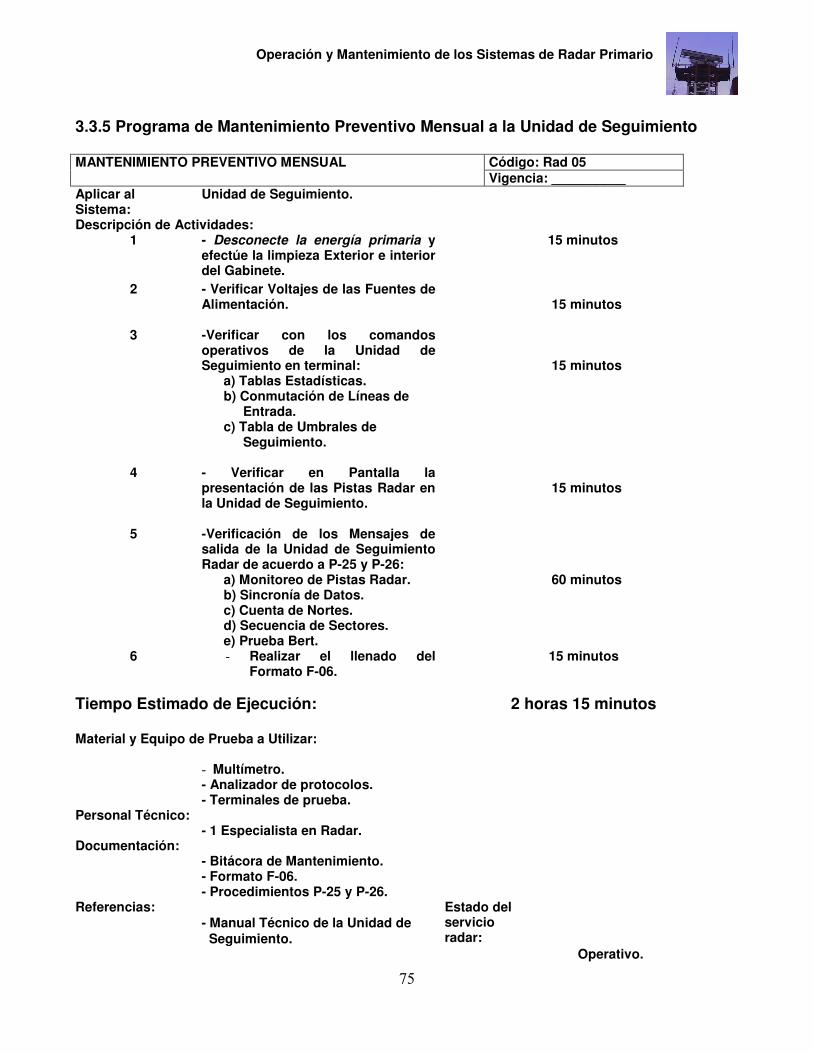
Operación y Mantenimiento de los Sistemas de Radar Primario
75
3.3.5 Programa de Mantenimiento Preventivo Mensual a la Unidad de Seguimiento
Código: Rad 05 MANTENIMIENTO PREVENTIVO MENSUAL Vigencia: __________
Aplicar al Sistema:
Unidad de Seguimiento.
Descripción de Actividades: 1 - Desconecte la energía primaria y
efectúe la limpieza Exterior e interior del Gabinete.
15 minutos
2 - Verificar Voltajes de las Fuentes de Alimentación.
15 minutos
3 -Verificar con los comandos operativos de la Unidad de Seguimiento en terminal: a) Tablas Estadísticas. b) Conmutación de Líneas de
Entrada. c) Tabla de Umbrales de
Seguimiento.
15 minutos
4 - Verificar en Pantalla la presentación de las Pistas Radar en la Unidad de Seguimiento.
15 minutos
5 -Verificación de los Mensajes de salida de la Unidad de Seguimiento Radar de acuerdo a P-25 y P-26: a) Monitoreo de Pistas Radar. b) Sincronía de Datos. c) Cuenta de Nortes. d) Secuencia de Sectores. e) Prueba Bert.
60 minutos
6 - Realizar el llenado del Formato F-06.
15 minutos
Tiempo Estimado de Ejecución: 2 horas 15 minutos Material y Equipo de Prueba a Utilizar:
- Multímetro. - Analizador de protocolos. - Terminales de prueba. Personal Técnico: - 1 Especialista en Radar. Documentación: - Bitácora de Mantenimiento. - Formato F-06. - Procedimientos P-25 y P-26. Referencias: - Manual Técnico de la Unidad de Seguimiento.
Estado del servicio radar:
Operativo.

Operación y Mantenimiento de los Sistemas de Radar Primario
76
3.3.6 Programa de Mantenimiento Preventivo Mensual al Sistema de Visualización
Código: Rad 06. MANTENIMIENTO PREVENTIVO MENSUAL Vigencia: ________
Aplicar al Sistema:
Sistema de Visualización de Información Radar.
Descripción de Actividades:
Tiempo:
1 - Desconecte la energía primaria y efectúe la Limpieza Exterior e Interior al gabinete, partes internas y fuentes de voltaje. Tanto para la Unidad de Conversión de Barrido y Generador Grafico, así como para el Monitor de TV y su Teclado.
45 minutos
2 - Verificar los Voltajes de las Fuentes de Alimentación.
15 minutos
3 -Verificar la presencia de las siguientes señales en el Monitor de TV:
a) Señal de Video Radar. b) Señal de Video Secundaria. c) Señal de Video Cruda. d) Señal de Mapa Primario. e) Señal de Video cruda Meteo. f) Señal de Mapa meteorológico. g) Pistas Radar. h)Medición de Distancia y Acimut.
15 minutos
4 - Realizar el llenado del Formato F-07.
15 minutos
Tiempo Estimado de Ejecución: 1 horas 30 minutos Material y Equipo de Prueba a Utilizar:
- Utensilios de Limpieza. - Multímetro. Personal Técnico: - 1 Especialista en Radar. Documentación: - Formato F-07. Referencias: - Manual Técnico del Sistema de
Visualización.
Estado del Servicio Radar
durante el Mantenimiento:
- Operativo.

Operación y Mantenimiento de los Sistemas de Radar Primario
77
3.3.7 Programa de Mantenimiento Preventivo Semestral del Transmisor y Receptor
Código: Rad-07. MANTENIMIENTO PREVENTIVO SEMESTRAL
Vigencia: _________
Aplicar al Sistema:
Transmisor/Receptor Primario.
Descripción de Actividades:
Tiempo:
1 - Desactive la energía primaria y aterrice los elementos que almacenen energía. Realice el llenado del Formato F-08.
2 horas
2
- Verificar el funcionamiento de las diferentes Coberturas de Recepción de acuerdo al Procedimiento P-22.
45 minutos
3 - Verificar la Frecuencia y Potencia del Oscilador Local Estabilizado (STALO), de acuerdo al Procedimiento P-11.
60 minutos
4 - Verificar la Frecuencia y Potencia del Oscilador Coherente, de acuerdo al Procedimiento P-12.
30 minutos
5 - Verificación del Amarre en Fase del Oscilador Coherente, de acuerdo al Procedimiento P-21.
45 minutos
6 - Verificar la Ganancia del Receptor de acuerdo al Procedimiento P-08.
45 minutos
7 - Verificar el Ancho de Banda del Receptor de acuerdo al Procedimiento P-16.
45 minutos
8 - Verificar la operación del Control Automático de Frecuencia (CAF) de acuerdo al Procedimiento P-14.
45 minutos
9 - Realizar el llenado del Formato F-09.
3 horas
Tiempo Estimado de Ejecución: 10 horas 15 minutos
Página 1 de 2

Operación y Mantenimiento de los Sistemas de Radar Primario
78
Material y Equipo de Prueba a Utilizar:
- Utensilios de limpieza. - Multímetro. - Maletín de herramienta
milimétrica.
- Analizador de Espectros y/u Ondámetro.
- Diodo Detector. - Cable para RF tipo “N” de 5m. - Cable de Video tipo “BNC” de 3
m.
- Carga de 50 Ώ BNC. - Conector “T” BNC. Personal Requerido:
- 2 Especialistas de Radar. Documentación: - Procedimiento P-08. - Procedimiento P-11. - Procedimiento P-12. - Procedimiento P-14. - Procedimiento P-16. - Procedimiento P-21. - Formato F-08. - Formato F-09.
Referencias:
- Manual Técnico Transmisor. - Manual Técnico Receptor.
Estado del
servicio radar durante el mantenimiento:
- Operativo.

Operación y Mantenimiento de los Sistemas de Radar Primario
79
3.3.8 Programa de Mantenimiento Preventivo Semestral a la Antena
Aplicar al Sistema: Antena Radar.
Descripción de Actividades:
Tiempo:
Nota de seguridad
- Activar la protección para evitar la puesta en Operación de la Antena.
1 - Verificación Visual y Mecánica de la Antena y Sistema de Arrastre.
15 minutos
2 - Verificación Visual de los Conectores y Cableado.
15 minutos
3 - Revisión Mecánica y Eléctrica de la Junta Rotativa.
30 minutos
4 - Revisión de los Niveles de Aceite.
15 minutos
5 - Alternar la Operación del Moto Reductor. Si es el caso.
45 minutos
6 - Verificación Eléctrica del Polarizador de Antena.
15 minutos
7 - Limpieza y verificación visual del estado de los Relevadores y Componentes de la Unidad de Control de la Antena.
30 minutos
8 - Verificación de la Orientación de los Blancos Radar de acuerdo al Procedimiento P-23.
30 minutos
9 - Realizar el llenado del Formato F-10.
30 minutos
10 - Verificación del sistema de tierra de acuerdo al Procedimiento P-24
45 min
Tiempo Estimado de Ejecución: 3 horas 45 min
Código: Rad-08. MANTENIMIENTO PREVENTIVO SEMESTRAL
Vigencia: __________

Operación y Mantenimiento de los Sistemas de Radar Primario
80
Material y Equipo de Prueba a Utilizar:
- Estopa, gasolina, franela. - Lámpara.
- Aceite. - Grasera. - Caja de Herramienta milimétrica.
- Sopladora o aspiradora. - Pantalla indicadora Radar.
Personal Requerido:
- 2 Especialistas de Radar.
- 1 Técnico Mecánico.
- 1 Técnico Electrónico.
Documentación:
- Bitácora de Mantenimiento. - Formato F-10.
- Procedimiento P-23. - Procedimiento P-24. Referencias: - Manual Técnico Antena Radar. Estado del
servicio radar durante el Mantenimiento:
- Fuera de Servicio.

Operación y Mantenimiento de los Sistemas de Radar Primario
81
3.3.9 Programa de Mantenimiento Semestral a la Unidad de Seguimiento
Código: Rad 09 MANTENIMIENTO PREVENTIVO SEMESTRAL Vigencia: ________
Aplicar al Sistema:
Unidad de Seguimiento.
Descripción de Actividades:
Tiempo
1 - Desactive la energía primaria y efectúe la limpieza de Tarjetas y Fuentes de Voltaje.
1 hora
2 - Aplicar Programas de Diagnostico.
1 hora
3 - Realizar el llenado del Formato: F-07.
30 minutos
Tiempo Estimado de Ejecución: 2 horas 30 minutos Material y Equipo de Prueba a Utilizar:
- Equipo de limpieza. - Programas de Diagnostico. Personal requerido:
- 1 Especialistas de Radar. Documentación:
- Bitácora de Mantenimiento. - - Formato F-09. Referencia: - Manual Técnico Unidad de
Seguimiento.
Estado del
Servicio Radar durante el mantenimiento.
- Operativo.

Operación y Mantenimiento de los Sistemas de Radar Primario
82
3.3.10 Programa de Mantenimiento Preventivo Semestral a la Unidad de Visualización
Código: Rad 10 MANTENIMIENTO PREVENTIVO SEMESTRAL Vigencia: ____________
Aplicar al Sistema:
Unidad de Visualización.
Tiempo: Descripción de Actividades:
1 - Desactive la energía primaria y limpie las Tarjetas y Fuentes de voltaje de la Unidad Convertidora de Barrido y Generador Grafico, así como del Monitor de TV.
1 hora
2 - Aplicar Programas de Diagnostico.
1 hora
3 - Realizar el llenado del Formato: F-07.
15 minutos
Tiempo Estimado de Ejecución: 2 horas 15 minutos Material y Equipo de Prueba a Utilizar:
- Material de limpieza. - Software de diagnostico. Personal Requerido:
- 1 Especialista de Radar Documentación:
- Bitácora de Mantenimiento. - Formato F-07. Referencias: - Manual Técnico de Indicador. Estado del Servicio
Radar durante el Mantenimiento:
Operativo.

Operación y Mantenimiento de los Sistemas de Radar Primario
83
3.3.11 Programa de Mantenimiento Preventivo Anual del Transmisor y Receptor
Código: Rad-11. MANTENIMIENTO PREVENTIVO ANUAL Vigencia: _________
Aplicar al Sistema:
Transmisor/Receptor Primario.
Descripción de Actividades:
Tiempo Requerido:
1 - Verificación y Ajuste de la Corriente del Diodo de Protección, de acuerdo al Procedimiento P-20.
45 minutos
2 - Verificación y Ajuste de la Protección de Sobre Corriente del Regulador, de acuerdo al Procedimiento P-20.
45 minutos
3 - Verificación y Ajuste de la Protección de Sobre Corriente del Magnetrón, de acuerdo al Procedimiento P-20.
45 minutos
4 - Verificación y Ajuste de la Protección de la Fuente de Alta Tensión, de acuerdo al Procedimiento P-20.
45 minutos
5 - Limpieza y Ajuste de los contactos de la base de la Válvula Moduladora.
45 minutos
6 - Extracción y limpieza de las Tarjetas de circuito impreso del Procesador y Extractor de Video.
3 horas
7 - Medición del Tiempo Des ionización del tubo T/R del Duplexor. Según Procedimiento P-15.
30 minutos
8 - Realizar el llenado del Formato F-11.
15 minutos
Tiempo Estimado de Ejecución: 7 horas 30 minutos

Operación y Mantenimiento de los Sistemas de Radar Primario
84
Material y Equipo de Prueba a Utilizar:
- Utensilios de limpieza. - Multímetro. - Maletín de herramienta
milimétrica.
- Fuente de alimentación 0-50 Voltios CD.
Personal Requerido:
- 2 Especialistas de Radar. Documentación: - Bitácora de Mantenimiento. - Formato F-11. - Procedimiento P-20. Referencias:
- Manual Técnico del Transmisor y Receptor.
Estado del servicio radar durante el mantenimiento:
- Operativo.

Operación y Mantenimiento de los Sistemas de Radar Primario
85
3.3.12 Programa de Mantenimiento Preventivo Anual a la Antena
Aplicar al Sistema:
Antena de Radar. Tiempo Requerido:
Descripción de Actividades:
Nota de seguridad
Activar la protección para evitar la puesta en Operación de la Antena.
1 - Realizar el Mantenimiento Semestral de la antena Código de Programa Rad-08.
4 horas 30 minutos
2 - Cambio de Aceite al Engrane Principal.
45 minutos
3 - Cambio de aceite a los reductores.
45 minutos
4 - Engrasado de Motores.
1 hora
5 - Realizar el llenado del Formato F-12.
30 minutos
Tiempo Estimado de Ejecución: 7 horas 30 minutos Material y Equipo de Prueba a Utilizar:
- Generador de RF. - Medidor de potencia. - Cable de RF de 5 m. -Amperímetro de gancho y
multímetro.
- Estopa, gasolina y franela. - Lámpara. - Aceite.
- Grasera. - Caja de Herramientas milimétrica.
Personal Requerido:
- 3 Especialistas de Radar. - Un Técnico Mecánico. Documentos: - Bitácora de Mantenimiento. - Formato F-12. - Programa Rad-08.
Código: Rad-12 MANTENIMIENTO PREVENTIVO ANUAL
Vigencia: ___________

Operación y Mantenimiento de los Sistemas de Radar Primario
86
Referencias: - Memoria de Estación. - Manual Técnico de la Antena. Estado del
servicio radar durante el mantenimiento:
- Fuera de Servicio.

Operación y Mantenimiento de los Sistemas de Radar Primario
87
3.4. FORMATOS DE MANTENIMIENTO PREVENTIVO

Operación y Mantenimiento de los Sistemas de Radar Primario
88
3.4.1 Formato de Mantenimiento Preventivo Diario
HOJA DE VERIFICACIÓN DIARIA DEL SISTEMA DE RADAR PRIMARIO
FECHA: ___________ ESTACIÓN: _______ HORA: _________ CODIGO F-01
ORDEN DE TRABAJO: ________
VERIFICACIÓN REALIZADA POR _______________________
EQUIPO ESTADO ALARMAS OBSERVACIONES
Transmisor
Receptor
Procesador
Unidad de seguimiento
Antena
Pantalla
Calidad de detección
Residuos cancelación
Aire acondicionado
Temperatura
Distribuidor de energía
eléctrica
Envío de datos remoto
Control remoto

Operación y Mantenimiento de los Sistemas de Radar Primario
89
3.4.2 Formato de Mantenimiento Preventivo Semanal
LISTA DE VERIFICACIÓN SEMANAL CODIGO: F-02 FECHA: _________ ESTACION: __________ ORDEN DE TRABAJO: ____________
PARÁMETRO REFERENCIA
ESTADO OBSERVACIONES
Corriente
Generador RF
Fuente etapa de potencia
Corriente etapa
potencia.
Tx
Corriente protección
AFC Centrado
Ruido Térmico
STC Activo
Desactivo
Rx
AGC Activo Desactivo
BITE ( P/S, C/E ) 0000
CH
A-A
Otras Alarmas
Corriente Generador de
RF
Fuente etapa de potencia
Corriente etapa de potencia.
Tx
Corriente protección
Corriente cristales
mezclador
Ruido térmico
STC Activo Desactivo
Rx
AGC Activo Desactivo
BITE ( P/S, C/E ) 0000
TR
AN
SM
ISO
R-R
EC
EP
TO
R P
RIM
AR
IO
CH
A-B
Otras Alarmas Apagadas

Operación y Mantenimiento de los Sistemas de Radar Primario
90
REFERENCIA
ESTADO
OBSERVACIONES
ESTADO DEL MONITOR Normal
DETECCIÓN DE BLANCOS Normal
IND
ICA
DO
R
PRESENTACIÓN PISTAS Normal
CANAL ASIGNADO A/B
No. PLOTS PSR
% PLOTS COMB
UN
IDA
D D
E S
EG
UIM
IEN
TO
1
PISTAS
CANAL ASIGNADO A/B
No. PLOTS PSR
% PLOTS COMB
TE
RM
INA
LE
S
UN
IDA
D D
E S
EG
UIM
IEN
TO
2
PISTAS
ESTADO DEL SISTEMA Normal
LÍNEA 220 VCA
CARGA 209 VCA
VOLTAJE
BATERÍA 270 VCD
LÍNEA 34 A
CARGA 20 A
UP
S
CORRIENTE
BATERÍA 0.0 A
3

Operación y Mantenimiento de los Sistemas de Radar Primario
91
REFERENCIA ESTADO OBSERVACIONES
VIA 1 " A " ACT/DES
VIA 1 " B " ACT/DES
C/R VIA 1 Normal RADIO
C/R VIA 2 Normal
VIA 2 " A " ACT/DES
VIA 2 " B " ACT/DES
C/R VIA 1 Normal
C/R VIA 2 Normal SASYN METEO Normal
EN
LA
CE
S
VIA TELEFONICA
SASYN CCO Normal
LÍNEAS TELEFÓNICAS Normal
TEMPERATURA < 21 ° C
ENTRADA SALIDA OBSERVACIONES
FASE 1 220 VCA
FASE 2 220 VCA 1
FASE 3 220 VCA
FASE 1 220 VCA
FASE 2 220 VCA RE
GU
LA
DO
RE
S
2
FASE 3 220 VCA REFERENCIA ESTADO OBSERVACIONES
CARGA 34 A
POLARIZADOR LIN/CIRC
BALIZAS Normal
ELECTRICA
ILUMINACIÓN Normal NIVEL ACEITE Normal
FUGAS Sin
RUIDOS Sin
AN
TE
NA
MECÁNICA
VIBRACIONES Sin REFERENCIA ESTADO OBSERVACIONES
FASE 1 380 VCA
FASE 2 380 VCA
FASE 3 380 VCA
ELECTRICA
CARGA NIVEL ACEITE Normal
AGUA Normal
AL
IME
NT
AC
IÓN
PLANTA AUX.
COMBUSTIBLE Normal

Operación y Mantenimiento de los Sistemas de Radar Primario
92
3.4.3 Formato de Mantenimiento Preventivo Mensual del Transmisor
Fecha: ________ Estación: ________ Canal: _________ Código: F-03
1.- Lecturas Generales: Orden de trabajo: _________
PARAMETRO REFERENCIA CONDICIONES
ACTUALES I promedio etapa potencia Alto voltaje I promedio cto. protección I promedio alto voltaje V filamentos Magnetrón. V filamentos Thyratrón Fuente de Medio Voltaje
Nota: I es el símbolo de Corriente; V es el símbolo de voltaje. 2.- Espectro de Transmisión
Nota: Los valores de los parámetros del analizador de espectro deben ser ajustados de acuerdo a la frecuencia de transmisión, ancho de pulso ( τ ) y frecuencia de repetición de pulso (PRF) del radar en mantenimiento.
CONFIGURACION: Punto de prueba: ________ UNIDAD: Tx. ________ FREC.: _________ MHz SPAN: __________ Mhz SWP: __________ mseg VBW: __________ kHz REFERENCIA:_____ dBm ATTEN.: __________ dB

Operación y Mantenimiento de los Sistemas de Radar Primario
93
3.- Parámetros Generales
Parámetro Referencia Valor Actual RELACIÓN DE LÓBULO PRINCIPAL A LÓBULO LATERAL DEL ESPECTRO
≥ 9 dB
ANCHO DE PULSO
POTENCIA DIRECTA Punto de Prueba: _____
POTENCIA REFLEJADA Punto de prueba: _____
RELACIÓN DE ONDA ESTACIONARIA ( ROE )
≤ 1.2
DESVIACIÓN EN FRECUENCIA ( C.A.F )
4.- Disparo del Transmisor
Pá
CONFIGURACIÓN: Punto de Prueba.: _________ Módulo: __________ FV (CD) : _______ FH (ms) : _______ Sincronía: ______
DP
RP
DP
RP
−
+
=
1
1
ROE

Operación y Mantenimiento de los Sistemas de Radar Primario
94
OBSERVACIONES:
Responsable Técnico: __________________________

Operación y Mantenimiento de los Sistemas de Radar Primario
95
3.4.4 Formato de Mantenimiento Preventivo Mensual del Receptor
Fecha: ________ Estación: _______ Canal: ______ Código F-04 Orden de trabajo: _________ 1.- Fuentes de Voltaje
FUENTE DE ALIMENTACIÓN
REFERENCIA LECTURA
+5 VCD -5 VCD
+ 12 VCD. - 12 VCD. + 15 VCD. - 15 VCD.
+ 24 VCD NR. 2.- Parámetros Parámetro Valor de Referencia Valor Actual
Nivel de Ruido RMS a nivel FI: *
Nivel de Sensibilidad Tangencial
( MDS) *
Plots de prueba ( 4 ) Presencia
* Los valores de referencia deben ser consultados en el manual técnico del receptor. 3.- Verificar Presencia de Mapas Operativos ()
WSM CM FAN2 FAN6
STC FAN FAN3 FAN7
BC FAN0 FAN4 LIGHT RAIN
LDM FAN1 FAN5 STRONG RAIN
Observaciones:_________________________________________________________
_______________________________________________________________________
Responsable Técnico: __________________________

Operación y Mantenimiento de los Sistemas de Radar Primario
96
3.4.5 Formato de Mantenimiento Preventivo Mensual de la Unidad de Visualización Fecha: _______ Estación: _____ Orden de trabajo: _______ Código F-05 1.- Fuentes de Voltaje
FUENTE DE ALIMENTACIÓN
REFERENCIA LECTURA
+5 VCD + 5 ± 5% VCD -5 VCD - 5 ± 5% VCD
+ 12 VCD. + 12 ± 5% VCD - 12 VCD. - 12 ± 5% VCD + 15 VCD. + 15 ± 5% VCD - 15 VCD. - 15 ± 5% VCD
+ 24 VCD NR. + 24 ± 5% VCD 2.- Verificar la Presencia de las diferentes entradas del Indicador ()
Señal de
Video
Primaria(VS1)
Video Cruda
Meteorológica
(VS5)
Plots VRM
Señal de
Video
Primaria(VS2)
Mapas Canal
Primario (VS6) Pistas
Video Cruda
Secundaria
(VS3)
Mapa Canal
Secundario
(VS7)
Canales de
Navegación
Video Cruda
Primaria
(VS4)
Vectores
Meteorológicos EBL
Observaciones:___________________________________________________________________
_________________________________________________________________________________
_________________________________________________________________________________
Responsable Técnico: __________________________

Operación y Mantenimiento de los Sistemas de Radar Primario
97
3.4.6 Formato de Mantenimiento Preventivo Mensual de la Unidad de Seguimiento Fecha: _______ Estación: _____ Orden de trabajo: _______ Código F-06 Fuentes de Alimentación
Verificación de Comandos Operativos
- Tablas estadísticas de entrada.
NUMERO DE PLOTS PRIMARIOS
NUMERO DE PLOTS SECUNDARIOS
- Tablas estadísticas de salida.
PISTAS ( TRACKS ) PRIMARIAS
PISTAS ( TRACKS ) SECUNDARIAS
PISTAS ( TRACKS ) COMBINADAS
- Conmutación de líneas de entrada
UNIDAD DE SEGUIMIENTO
EQUIPO ESTADO OPERACIÓN PRIMARIO A
PRIMARIO B
SECUNDARIO
METEOROLOGICO
REFERENCIA VALOR
+5 ± 5% VCD
-5 ± 5% VCD
+ 12 ± 5% VCD
- 12 ± 5% VCD

Operación y Mantenimiento de los Sistemas de Radar Primario
98
- Parámetros de Umbrales de Detección.
ENTRADA INICIACIÓN DE PISTA
TERMINACION DE
PISTA
Consecutivos Total
Zona Cercana Radar Primario
Zona Lejana Radar Primario
Radar Secundario
Verificación de la Información de Salida de la Unidad de Seguimiento - Verificación de las Pistas Radar con la Pantalla Indicadora.
Localización de Blanco
Vuelta de antena Presencia de Pista Radar
Pérdida de Pista Radar
Primera Segunda Tercera Cuarta Quinta Sexta
Distancia _______ Acimut ________
Séptima -Verificación de la Tasa de Errores en el enlace de datos (prueba BERT).
Prueba BERT
Fecha: Estación: Tipo de Enlace:
Hora de inicio:
Hora de termino: Tiempo total:
Cantidad de bits transmitidos:
Cantidad de bits recibidos:
Cantidad Total de Errores: __________
Aceptación de enlace: Estado del enlace: Operativo _______ Inoperativo______

Operación y Mantenimiento de los Sistemas de Radar Primario
99
- Verificación de los mensajes de salida de la Unidad de Seguimiento con un analizador de PROTOCOLOS.
OBSERVACIONES:____________________________________________________________________________________________________________________________________
Responsable Técnico: _____________________
Análisis de Datos Radar:
Fecha Estación Formato de transmisión de datos (Protocolo)
Hora de inicio
Hora de termino Tiempo total
Cantidad de bits transmitidos
Cantidad de bits recibidos
Observaciones

Operación y Mantenimiento de los Sistemas de Radar Primario
100
3.4.7 Formato de Mantenimiento Preventivo Semestral del las Unidades de
Seguimiento y Visualización Fecha: _________ Estación: ________ Canal: ______ Código. F- 07 Orden de trabajo: _______ 1.- Pruebas de falla indicadas por LED
TARJETA REFERENCIA LECTURA FINAL
Unidad de Procesamiento Coprocesador
Interfase 1 Interfase 2 Interfase 3 Interfase 4 Memoria
Durante la prueba, los indicadores luminosos están parpadeando, al final, se apagarán si
no existe falla.
2.- Prueba de Circuitería (Hardware)
Tarjeta Comando de Prueba Referencia Valor Actual
Coprocesador D1 Operativo
Interfase D2 Operativo
Unidad de
Procesamiento
Central ( CPU )
D6 Operativo.
Observaciones:___________________________________________________________________
_________________________________________________________________________________
_________________________________________________________________________________
Responsable Técnico: __________________________

Operación y Mantenimiento de los Sistemas de Radar Primario
101
3.4.8 Formato de Mantenimiento Preventivo Semestral del Transmisor
Fecha: _________ Estación: ________ Canal: ________ Código F-08
Orden de trabajo: __________ 1.- Lecturas Generales
PARAMETRO REFERENCIA CONDICIONES
ACTUALES I promedio etapa potencia Alto voltaje I promedio cto. Protección I promedio alto voltaje V filamentos Magnetrón. V filamentos Thyratron Fuente de Medio Voltaje
Nota: I es el símbolo de Corriente; V es el símbolo de voltaje. 2.- Espectro de Transmisión
CONFIGURACION: TP: _______ UNIDAD: Tx FREC.: ________ MHz SPAN: __________MHz SWP: ___________ms VBW: ___________kHz REFERENCIA: _________dB ATTEN: ______________dB

Operación y Mantenimiento de los Sistemas de Radar Primario
102
3.- Parámetros Generales
Parámetro Referencia Valor Actual RELACIÓN DE LÓBULO PRINCIPAL A LÓBULO LATERAL
≥ 9 dB
ANCHO DE PULSO
POTENCIA DIRECTA Punto de Prueba: _____
POTENCIA REFLEJADA Punto de prueba: _____
RELACIÓN DE ONDA ESTACIONARIA (ROE)
≤ 1.2
DESVIACIÓN EN FRECUENCIA (CAF)
No. DE PLOT’s (Elemental, Pol. Circ.)
4.- Prueba de Sincronía
CONFIGURACION: TP: _____ (con carga de 75 ΩΩΩΩ) UNIDAD: Tx FV (CD) : _____ V FH : __________n s SINCRO: ________Tx
DP
RP
DP
RP
−
+
=
1
1
ROE

Operación y Mantenimiento de los Sistemas de Radar Primario
103
5.- Diodo de Protección
6.- Corriente del Regulador
CONFIGURACION: TP: _______ UNIDAD: Tx FV (CA) : _____ V
FH : __________µµµµ s SINCRO: _______ Tx
CONFIGURACION TP: _______ UNIDAD: Tx FV (CA) : _____ V
FH : __________µµµµ s SINCRO: _______ Tx

Operación y Mantenimiento de los Sistemas de Radar Primario
104
7.- Voltaje de Carga de la Red Formadora de Pulsos (PFN)
8.- Voltaje de Rizo
Página 4 de 8
CONFIGURACION : TP: __________ MÓDULO: ____________ FV (CA) : _____V
FH : _________ µµµµ s SINCRO: _______ Tx
CONFIGURACION TP: ___________ MÓDULO: ____________ FV (CA) : ________mV
FH : ___________µµµµ s SINCRO: _________ Tx

Operación y Mantenimiento de los Sistemas de Radar Primario
105
9.- Referencia de Carga de la Red Formadora de Pulsos (PFN)
10.- Disparo del Regulador de Carga
11- Sincronía
CONFIGURACION: TP: _________ MÓDULO: _______________ FV (CD) : _______V
FH : _____________µµµµ s SINCRO: _________Tx
CONFIGURACION TP: ________ MÓDULO: ________________
FV (CA) : _______ V
FH : ___________ µµµµ s SINCRO: __________ Tx
CONFIGURACION TP: __________ MÓDULO: ______________ FV (CA): ______ V
FH: ___________ µµµµ s SINCRO: __________Tx

Operación y Mantenimiento de los Sistemas de Radar Primario
106
12.- Compuerta
13.- Rejilla de Control de la Válvula Moduladora
14.- Sobre Corriente de Magnetrón
CONFIGURACIÓN: TP: _________ MÓDULO: ________________ FV (CA) : _______V
FH : ___________µµµµ s SINCRO: _________ Tx
CONFIGURACIÓN: TP: ________ MÓDULO: __________________ FV (CD): _______V (punta de prueba x 10)
FH : _________ µµµµ s SINCRO: ________ Tx
CONFIGURACIÓN: TP: ________ MÓDULO: _________________ FV (C.D.) : ______ V
FH : __________ µµµµ s SINCRO: _________ Tx

Operación y Mantenimiento de los Sistemas de Radar Primario
107
15.- Pulso de Seguridad
16.- Sobre Corriente de la Fuente de alta Tensión
17.- Envolvente del Pulso de Tx
CONFIGURACION: TP: _________ MÓDULO: _____________ FV (CD): _____ V
FH: _________µµµµ s SINCRO: _______Tx
CONFIGURACION: TP: _________ MÓDULO: ______________ FV (CD): ______V
FH: _________ µµµµ s SINCRO: ________Tx
CONFIGURACION: TP: ____________ MÓDULO: ______ FV (CD): _______ mV FH: __________ n s SINCRO: __________Tx
REFERENCIA: ττττ = ____ ns

Operación y Mantenimiento de los Sistemas de Radar Primario
108
18.- Fuentes de Voltaje Medio
FUENTE REFERENCIA VALOR ACTUAL
Observaciones:__________________________________________________________________
_________________________________________________________________________________
_________________________________________________________________________________
_________________________________________________________________________________
Responsable Técnico: __________________________

Operación y Mantenimiento de los Sistemas de Radar Primario
109
3.4.9 Formato de Mantenimiento Preventivo Semestral del Receptor Fecha: _________ Estación: _______ Canal: _______ Código F-09
Orden de trabajo: _______ 1.- Fuentes de Voltaje
FUENTE DE ALIMENTACIÓN
REFERENCIA LECTURA
+5 VCD - 5 VCD
+ 12 VCD. - 12 VCD. + 15 VCD. - 15 VCD.
+ 24 VCD NR.
2.- Forma de Onda de Salida del Oscilador Local (STALO) y Niveles de Potencia
Parámetro Valor de Referencia Valor Actual
Nivel de Potencia Pico a la salida del STALO:
Nivel de Potencia Pico a la salida del Oscilador Coherente
CONFIGURACION TP:_____________ MÓDULO: STALO Analizador de Espectros: FREC.: __________ MHz SPAN : ___________ MHz SWEEP: __________ ms ATTE.__________ dB
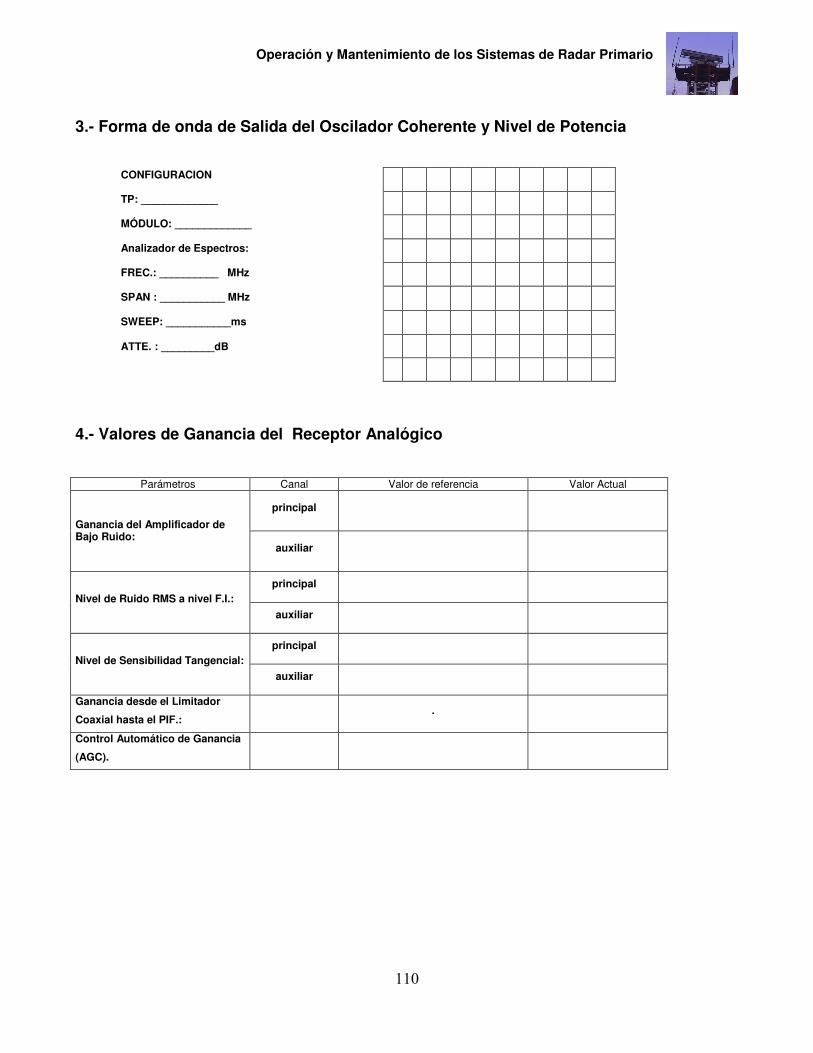
Operación y Mantenimiento de los Sistemas de Radar Primario
110
3.- Forma de onda de Salida del Oscilador Coherente y Nivel de Potencia 4.- Valores de Ganancia del Receptor Analógico
Parámetros Canal Valor de referencia Valor Actual
principal
Ganancia del Amplificador de Bajo Ruido:
auxiliar
principal Nivel de Ruido RMS a nivel F.I.:
auxiliar
principal Nivel de Sensibilidad Tangencial:
auxiliar
Ganancia desde el Limitador
Coaxial hasta el PIF.: .
Control Automático de Ganancia
(AGC).
CONFIGURACION TP: _____________ MÓDULO: _____________ Analizador de Espectros: FREC.: __________ MHz SPAN : ___________ MHz SWEEP: ___________ms ATTE. : _________dB

Operación y Mantenimiento de los Sistemas de Radar Primario
111
5.- Amarre de Fase del Oscilador Coherente a.- Pulso de Amarre
b.- Compuerta del COHO
CONFIGURACION: TP: _____________ UNIDAD: _________ MÓDULO: ________ FV (CA): _________V FH: _____________µs SINCRO: ________ Tx
CONFIGURACION TP: ______________ UNIDAD: ________ FV1 (CD): ________V FV2 (CD): ________V FH: _____________µs SINCRO: ________ Tx

Operación y Mantenimiento de los Sistemas de Radar Primario
112
c.- Amarre en Fase del COHO
6.- Control Automático de Frecuencia (AFC) OBSERVACIONES: _________________________________________________________
_________________________________________________________________________________
_________________________________________________________________________________
_________________________________________________________________________________
Responsable Técnico: __________________________
CONFIGURACION: TP: ___________ UNIDAD: __________ Módulo: _______ FV (CD) :__________V FH = ______________µs SINCRO: __________Tx
CONFIGURACION TP: MÓDULO: ____________ Analizador de Espectros: FREC: __________ MHz SPAN : ___________MHz SWEEP: __________ ms ATTE. : ___________ dB

Operación y Mantenimiento de los Sistemas de Radar Primario
113
3.4.10 Formato de mantenimiento preventivo semestral de la antena Fecha: ________ Estación: _______ Orden de trabajo: ______ Código F-10
FACTOR REFERENCIA ESTADO OBSERVACIONES
RUIDOS AUSENTES
VIBRACIONES AUSENTES
HUMEDAD AUSENTES R
EV
ISIÓ
N
ME
CÁ
NIC
A
FISURAS NINGUNA
CONECTORES NORMAL
CABLEADO NORMAL
AN
TE
NA
VE
RIF
ICA
CIÓ
N
ELÉ
CT
RIC
A
ATENUACION
RUIDOS AUSENTES
VIBRACIONES AUSENTES
HUMEDAD AUSENTES R
EV
ISIÓ
N
ME
CÁ
NIC
A
FISURAS NINGUNA
CABLEADO NORMAL JU
NT
A R
OT
AT
IVA
VE
RIF
. E
LÉC
TR
ICA
ATENUACIÓN < 1.5 dB
ACEITE NORMAL
ENGRASADO NORMAL
VIBRACIONES AUSENTES
CORROSIÓN AUSENTES
CORRIENTE
MO
TO
RE
DU
CT
OR
1
STATUS OPER/ESPERA
ACEITE NORMAL
ENGRASADO NORMAL
VIBRACIONES AUSENTES
CORROSIÓN AUSENTES
CORRIENTE
MO
TO
RE
DU
CT
OR
2
STATUS OPER/ESPERA
ACEITE NORMAL
SIS
TE
MA
DE
AR
RA
ST
RE
EN
GR
AN
E
PR
INC
IPA
L
ENGRASADO NORMAL

Operación y Mantenimiento de los Sistemas de Radar Primario
114
OBSERVACIONES:
Responsable Técnico: __________________________
FACTOR
REFERENCIA ESTADO OBSERVACIONES
DESGASTE NORMAL
LUBRICACION NORMAL
LIMPIEZA NORMAL
PRESION 20-30 gr. P
ED
ES
TA
L
AN
ILLO
S D
ES
LIZ
AN
TE
S
ALINEAMIENTO CENTRADO
RUIDOS AUSENTES
ME
CA
NIC
O
VIBRACIONES AUSENTES
POLARIZACION LINEAL NORMAL
POLARIZACION
CIRCULAR NORMAL P
OL
AR
IZA
DO
R
ELE
CT
RIC
O
SOBRECARGA
RESISTENCIA
ES
TA
CIO
N
HUMEDAD
RESISTENCIA
SIS
TE
MA
DE
TIE
RR
AS
PA
RA
RA
YO
S
HUMEDAD

Operación y Mantenimiento de los Sistemas de Radar Primario
115
3.4.11 Formato de mantenimiento preventivo anual del Transmisor Fecha: ________ Estación: ________ Canal: _______ Código F-11 Orden de trabajo: ________
1.- Valores de protección
Protección REFERENCIA LECTURA: Sobre Corriente del
dispositivo de Protección
Sobre Corriente del Regulador
Sobre Corriente de la etapa de Potencia
Sobre Corriente de la Fuente de Alimentación
Tiempo de Desionización del T/R del duplexor
Observaciones:___________________________________________________________________
_________________________________________________________________________________
_________________________________________________________________________________
_________________________________________________________________________________
Responsable Técnico: __________________________
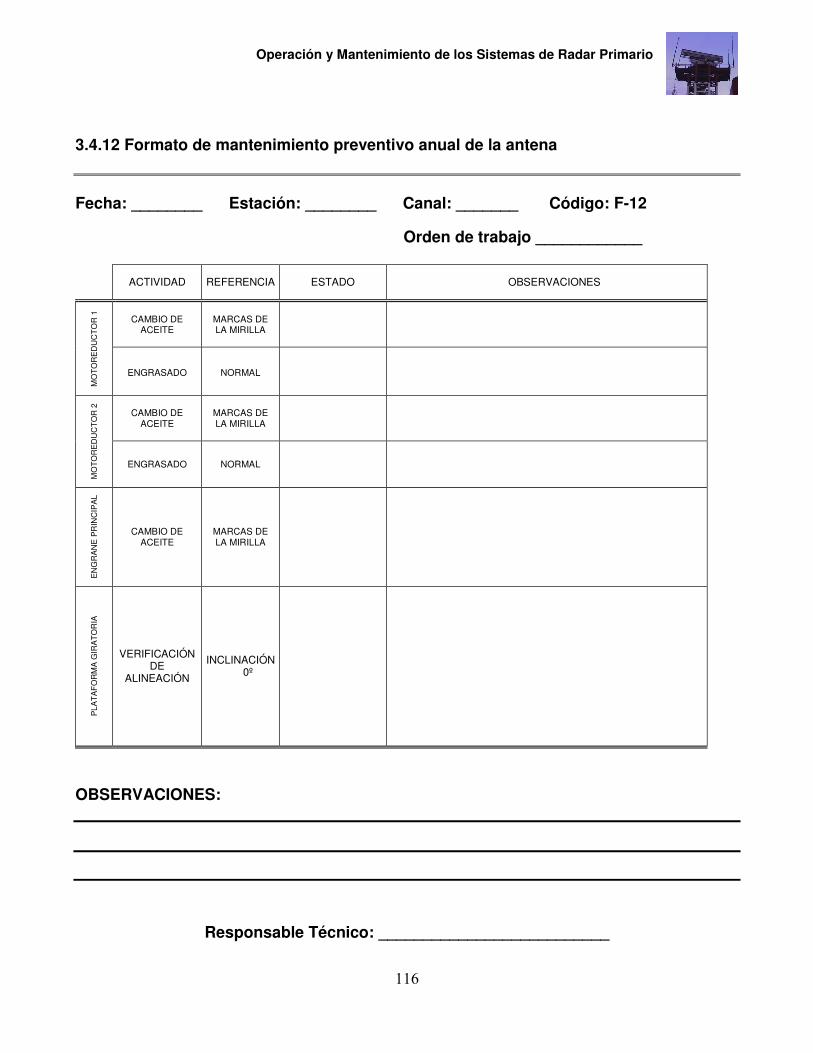
Operación y Mantenimiento de los Sistemas de Radar Primario
116
3.4.12 Formato de mantenimiento preventivo anual de la antena Fecha: ________ Estación: ________ Canal: _______ Código: F-12 Orden de trabajo ____________
ACTIVIDAD REFERENCIA ESTADO OBSERVACIONES
CAMBIO DE ACEITE
MARCAS DE LA MIRILLA
MO
TO
RE
DU
CT
OR
1
ENGRASADO NORMAL
CAMBIO DE ACEITE
MARCAS DE LA MIRILLA
MO
TO
RE
DU
CT
OR
2
ENGRASADO NORMAL
EN
GR
AN
E P
RIN
CIP
AL
CAMBIO DE ACEITE
MARCAS DE LA MIRILLA
PLA
TA
FO
RM
A G
IRA
TO
RIA
VERIFICACIÓN DE
ALINEACIÓN
INCLINACIÓN 0º
OBSERVACIONES:
Responsable Técnico: __________________________

Operación y Mantenimiento de los Sistemas de Radar Primario
117
3.5 PROCEDIMIENTOS DE MANTENIMIENTO PREVENTIVO

Operación y Mantenimiento de los Sistemas de Radar Primario
118
3.5.1 Introducción.
A continuación se describe brevemente el objetivo de cada uno de los procedimientos.
- Medición de frecuencia. Es importante conocer con exactitud la frecuencia que estamos transmitiendo con el objetivo de no este fuera del ancho de banda al que esta sintonizado el receptor, y que disminuya la intensidad de señal de los ecos. También para no interferir a otros equipos. - Medición del espectro en frecuencia. Se debe conocer como se distribuye la energía en el contenido armónico de la señal de transmisión. Con el objetivo de conocer la estabilidad y el envejecimiento de la válvula de potencia. - Medición de la envolvente. Es importante conocer el ancho de pulso así como su estabilidad, ya que de el depende la cantidad de potencia transmitida. - Medición de la potencia. Como el alcance del radar primario depende de la potencia transmitida es importante verificar la potencia directa y la potencia reflejada. - Medición de la ganancia. Este procedimiento se aplica en el receptor radar, y nos sirve para evaluar la ganancia total de toda la cadena de recepción, desde la entrada de radio frecuencia (RF), pasando por los amplificadores de RF, mezclador, y amplificadores de frecuencia intermedia (FI), es importante realizar esta medición sin la influencia de los controles auxiliares de sensibilidad (STC) y ganancia (AGC). Esta evaluación de la ganancia se tiene que hacer en cada una de los canales de recepción (sistemas de doble cobertura). - Medición de la sensibilidad. Este procedimiento se aplica en el receptor radar, y nos sirve para evaluar la sensibilidad total de la cadena de recepción con el objetivo de medir el mínimo nivel en (dBm) de la señal por encima del ruido térmico, y esta se realiza desde la entrada de radio frecuencia (RF), pasando por los amplificadores de RF, mezclador, y amplificadores de frecuencia intermedia (FI), y detector. Es importante realizar esta medición sin la influencia del control auxiliar de sensibilidad (STC). Esta evaluación de la sensibilidad se tiene que hacer en cada una de los canales de recepción (sistemas de doble cobertura). - Medición de ruido térmico. Este procedimiento se aplica en el receptor radar, y nos sirve para medir el nivel de ruido térmico de toda la cadena de recepción, desde la entrada de radio frecuencia (RF), pasando por los amplificadores de RF, mezclador, amplificadores de frecuencia intermedia (FI) y detección. Es importante considerar que el nivel de ruido térmico depende de dos factores: Del ruido interno generado en el receptor y del nivel de ganancia del receptor Radar. Se debe realizar esta medición sin la influencia de los controles auxiliares de sensibilidad (STC) y ganancia (AGC), esta evaluación del nivel de ruido térmico se tiene que hacer en cada una de los canales de recepción (sistemas de doble cobertura) y así mismo el valor del nivel de ruido debe estar a la mitad de la dinámica del circuito de control automático de ganancia (AGC).

Operación y Mantenimiento de los Sistemas de Radar Primario
119
- Medición de la potencia de los osciladores local y coherente. Como los osciladores nos sirven para realizar la heterodinación, ya sea en el mezclador o en el detector amplitud fase. Es importante para tener un buen nivel de salida del mezclador que la potencia del oscilador tenga el nivel adecuado. Recordemos que normalmente la potencia de la señal del eco es muy baja, por lo que se requiere que la mezcla se realice con una señal de una potencia mayor. - Medición del control automático de ganancia (AGC). Este procedimiento se aplica en el receptor radar, y nos sirve para mantener un control sobre la ganancia de toda la cadena de recepción, no se controla el nivel de la señal si no el nivel del ruido térmico, que es constante sobre toda la recurrencia, normalmente el AGC mantiene un nivel de ruido térmico constante, cuando se produce una desviación de ese nivel entra en acción el circuito AGC y normaliza el valor en amplitud del ruido térmico. Obviamente este control también ejerce un control sobre los ecos radar. - Medición del control automático de frecuencia (CAF). El Control Automático de Frecuencia sirve para mantener una diferencia constante entre la frecuencias de transmisión y de oscilador local. Normalmente la válvula de potencia es muy inestable en frecuencia por lo que es necesario corregir estas desviaciones. Se puede corregir la frecuencia del magnetrón o la frecuencia del oscilador local. - Medición de tiempo de desionización. Este procedimiento se aplica en el equipo de radar, y nos sirve para evaluar el tiempo en que el duplexor (gas del tubo T/R) se des ioniza y nos permite poder recibir ecos radar al termino de la fase de transmisión. Es importante que este tiempo sea de una duración corta para no perder información en la zona cercana a la estación radar. - Medición de ancho de banda. Este procedimiento se aplica en el receptor radar, si transmitimos pulsos es lógico que estemos recibiendo pulsos, y según la teoría de Fourier necesitamos reproducir una determinada cantidad de frecuencias armónicas de la fundamental para poder conformar la reproducción de los pulsos. Esto nos requiere una determinado ancho de banda, por lo cual es necesario evaluar este parámetro periódicamente. - Medición de la carga de los mapas operativos. Siendo lo mapas operativos los que básicamente controlan el umbral de detección es importante verificar su correcta carga de información. - Medición del generador de blanco de prueba (TTG). Como toda la cadena de recepción incluyendo procesador de señal y extractor de video, se evalúa constantemente por la inyección de unos blancos de prueba desde la antena. Es importante verificar el nivel de salida del generador del blanco de prueba.

Operación y Mantenimiento de los Sistemas de Radar Primario
120
- Medición de la protección de sobre corriente en el transmisor. Los transmisores de alta potencia del radar primario deben de contar con circuitos de protección, para que en caso de detectar alguna sobre corriente en alguna etapa, corten la radiación como medida precautoria. Es importante medir el nivel de referencia de activación de estos circuitos. - Amarre de fase del oscilador coherente. La fase del oscilador coherente es la referencia para poder eliminar los ecos fijos en un radar de exploración aérea. Por lo cual se debe verificar el amarre de la fase de este oscilador con la señal de transmisión. - Medición del combinador de haces (en antenas de doble cobertura). Es importante verificar el funcionamiento del equipo que efectúa la conmutación de los haces. Ya que esta conmutación nos garantiza eliminar grandes cantidades de clutter cercano, lo que eliminara la posibilidad de tener muchos residuos de cancelación y por lo tanto disminuir la cantidad de falsas alarmas. - Medición de la orientación de la información Radar. La visualización de la información radar tiene que estar perfectamente orientada con el objetivo de poder localizar los blancos de una forma precisa. Para esto, la información de recopia de la posición de la antena debe ser verificada periódicamente. Y básicamente la posición en tiempo de la señal de referencia en orientación con respecto a la posición de la antena. - Medición del sistema de tierras. Los equipos de radar básicamente cuentan con tres referencias: la denominada tierra lógica, la tierra de gabinete (chassis) y la tierra del sistema de pararrayos. Cada una de estas referencias están referidas a un sistema de tierra, el los cuales se debe verificar el valor de la resistencia a tierra de cada uno de los electrodos que conforman el sistema de tierra así como la humedad relativa del electrodo. Con el objetivo de que cualquier inducción eléctrica sea aterrizada por el sistema de tierra y salvaguardar la integridad del equipo de radar. - Medición de la transmisión de datos de radar. Normalmente cuando los datos (pistas radar) se envían de la estación radar a un sitio remoto para su explotación. Es necesario medir la calidad de la transmisión de datos y así verificar la calidad del enlace.

Operación y Mantenimiento de los Sistemas de Radar Primario
121
PROCEDIMIENTO P-01 MEDICION DE FRECUENCIA.
Utilizando un Ondametro
1.- Localice el punto de prueba del acoplador direccional en el Gabinete de RF (ver diag. A bloques en anexo C). 2.- Realice las condiciones de prueba como se muestra en la figura FP-01.
Figura FP-01 Medición de frecuencia con ondametro.. 3.- Coloque el transmisor en radiación.
4.- Ajuste el atenuador variable de tal modo que el pulso detectado, mostrado en el osciloscopio no este saturado. 5.- Gire el dial del medidor de frecuencia hasta que el pulso mostrado en el osciloscopio presente una disminución de amplitud (absorción de potencia). En ese momento el ondametro muestra la frecuencia transmitida del canal bajo prueba, tome nota de este valor. Error de lectura +/- 1 MHz. 6.- Restablezca las condiciones operativas.
Ondametro
Ch2 Osciloscopio
Ch1 Osciloscopio
Punto de prueba. RF
Carga 50 Ω
Gabinete
Transmisor
Sincronia
Atenuador Variable
Acoplador Direccional
30 db.
Nota: Atenuador variable a máximo valor

Operación y Mantenimiento de los Sistemas de Radar Primario
122
PROCEDIMIENTO P-02 MEDICION DE FRECUENCIA
Utilizando un Analizador de Espectro
1.- Localice el acoplador direccional de radio frecuencia en el Gabinete de RF (ver diagrama a bloques de la unidad de RF en anexo C). 2.- Realice las condiciones de prueba como se muestra en la figura FP-02.
Figura FP-02. Medición de frecuencia con Analizador de Espectro.
3.- Asegúrese de que el transmisor este radiando. 4.- Seleccione la frecuencia de operación del transmisor en el analizador de espectro. 5.- Ajuste el control de nivel de referencia y el control de atenuación del analizador de espectro en conjunto con el atenuador variable, para tener centrada la presentación del espectro de transmisión. 6.- Ajuste el control del analizador de espectros denominado expansión (SPAN), hasta visualizar claramente el espectro de transmisión. 7.- Ajuste el control del analizador de espectros denominado barrido (SWEEP), hasta observar claramente el contenido armónico de la señal. 8.- Ajuste el control del analizador de espectro denominado ancho de banda a nivel video (VBW), hasta observar claramente la señal. 9.- Tome nota del valor de frecuencia central mostrado en la carátula del analizador de espectro. 10.- Restablezca las condiciones operativas.
Punto de prueba. RF
Atenuador Variable
Analizador de Espectro
Acoplador Direccional 30 dB
Nota: Atenuador variable a máximo valor

Operación y Mantenimiento de los Sistemas de Radar Primario
123
PROCEDIMIENTO P-03 MEDICION DE LA ENVOLVENTE DEL PULSO DE RF.
1.- Localice el acoplador direccional de radio frecuencia en el Gabinete de RF (ver diagrama a bloques de la unidad de RF en anexo C). 2.- Realice las condiciones de prueba como se muestra en la figura FP-03.
Figura FP-03 Medición de la envolvente del pulso de transmisión.
3.- Coloque el transmisor en Radiación. 4.- Ajuste el atenuador variable de tal modo que el pulso detectado (mostrado en el osciloscopio) no este saturado. 5.- Inserte un atenuador de 3 dB y posicione la máxima amplitud como referencia. 6.- Quite el atenuador de 3 dB. 7.- Mida el ancho del pulso (τ ) en la línea de referencia. 8.- La lectura del ancho del pulso debe ser de ± 10% de acuerdo al manual técnico.
9.- Restablezca las condiciones operativas.
Ch2 Osciloscopio
Ch1 Osciloscopio
Punto de prueba de RF
Carga 50 Ω
Gabinete
Transmisor
Sincronía (Trigger)
Atenuador Variable
Acoplador direccional 30 dB
Nota: Atenuador variable a máximo valor

Operación y Mantenimiento de los Sistemas de Radar Primario
124
PROCEDIMIENTO P-04 MEDICION DE POTENCIA PICO DIRECTA
Utilizando un Medidor de Potencia Analógico
1.- Localice el acoplador de entrada potencia directa (ver diagrama a bloques de la unidad de RF en anexo C). 2.- Realice las condiciones de prueba como se muestra en la figura FP-04.
Figura FP-04 Medición de potencia pico directa con medidor analógico. 3.- Ponga el transmisor Radar en operación. Dependiendo del valor de atenuación del acoplador de entrada, seleccione el valor de atenuación (de inicio atenuación máxima) del atenuador variable, para tener una lectura adecuada en el medidor de potencia.
4.- Conecte el censor del medidor de potencia al atenuador y lea el valor de potencia medida. Tome nota de este valor. 4.- Calcule la potencia pico tomando en consideración lo siguiente: Pp = (el valor de atenuación del acoplador de entrada en dB + valor de atenuación del atenuador variable en dB + el valor en dB de la lectura del medidor de potencia)
)(PRT
PavPpτ
=
Donde: Pp: Potencia Pico PAVG: Potencia Promedio (Valor obtenido del Medidor de Potencia.) τ : Ancho del pulso de transmisión. PRT- Periodo de repetición de pulsos.
5.- Restablezca las condiciones operativas.
Atenuador Variable
Medidor analógico de potencia
Acoplador Direccional
30 dB
Nota: Atenuador variable a máximo valor
Medidor analógico de
potencia

Operación y Mantenimiento de los Sistemas de Radar Primario
125
PROCEDIMIENTO P-05 MEDICION DE POTENCIA PICO REFLEJADA
Utilizando un Medidor de Potencia Analógico 1.- Localice el acoplador direccional de potencia reflejada en el (ver diagrama a bloques de la unidad de RF en anexo C). 2.- Realice las condiciones de prueba como se muestra en la figura FP-05.
Figura FP-05 Medición de potencia pico reflejada con medidor analógico. 3.- Ponga el transmisor Radar en operación. Dependiendo del valor de atenuación del acoplador de entrada, seleccione el valor de atenuación (de inicio atenuación máxima) del atenuador variable para tener una lectura adecuada en el medidor de potencia. 4.- Conecte el termistor del medidor de potencia al atenuador y lea la potencia reflejada medida. Tome nota de este valor. 5.- Calcule la potencia pico reflejada, tomando en consideración lo siguiente: Pp = (el valor de atenuación del acoplador de entrada en dB + valor de atenuación del atenuador variable en dB + el valor en dB de la lectura del medidor de potencia ) Donde:
Pp: Potencia Pico Pavg: Potencia Promedio (Valor obtenido del Medidor de Potencia.) τ : Ancho del pulso de transmisión. PRT- Periodo de repetición de pulsos.
6.- Restablezca las condiciones operativas.
Atenuador Variable
Acoplador Direccional de potencia
reflejada
Nota: Atenuador variable a máximo valor
30 dB
Medidor de potencia analógico
)(PRT
PavPpτ
=

Operación y Mantenimiento de los Sistemas de Radar Primario
126
PROCEDIMIENTO P-06 MEDICIÓN DE POTENCIA DIRECTA.
Utilizando un Analizador de Potencia Pico 1.- Localice el acoplador de entrada potencia directa en el (ver diagrama a bloques de la unidad de RF en anexo C). 2.- Realice las condiciones de prueba como se muestra en la figura FP-06.
Figura FP-06 Medición de potencia directa con analizador de potencia pico.
2.- Ponga el transmisor Radar en operación. Dependiendo del valor de atenuación del acoplador de entrada, seleccione el valor de atenuación (de inicio atenuación máxima) del atenuador variable para tener una lectura adecuada en el medidor de potencia. 3.- Seleccionar el control auto escala. 4.- Seleccionar el control base de tiempo. 5.- Mover el control (dial) hasta visualizar la señal. 6.- Seleccionar medir Potencia Pico, tome nota del valor en dBm. 7.- Calcule la potencia pico directa, tomando en consideración lo siguiente: Pp = (el valor de atenuación del acoplador de entrada en dB + valor de atenuación del atenuador variable en dB + el valor en dBm de la lectura del medidor de potencia).
Atenuador Variable
Analizador de potencia pico
Acoplador Direccional
Nota: Atenuador variable a máximo valor
30 dB

Operación y Mantenimiento de los Sistemas de Radar Primario
127
8.- Calcule la potencia pico utilizando la siguiente fórmula: Donde: Pp. Potencia Pico. 1 mW. = 1 x 10-3 Vatios dBm = db referidos a 1 mW. Log = Logaritmo de base 10. 9.- Restablezca las condiciones operativas.
)1
log(10mw
PpdBm=

Operación y Mantenimiento de los Sistemas de Radar Primario
128
PROCEDIMIENTO P-07
MEDICIÓN DE POTENCIA PICO DIRECTA
Utilizando un Medidor de potencia Digital 1.- Localice el acoplador de entrada potencia directa (ver diagrama a bloques de la unidad de RF en anexo C). 2.- Realice las condiciones de prueba como se muestra en la figura FP-07.
Figura FP-07 Medición de potencia directa con medidor digital.
2.- Ponga el transmisor Radar en operación. Dependiendo del valor de atenuación del acoplador de entrada, seleccione el valor de atenuación (de inicio atenuación máxima) del atenuador variable para tener una lectura adecuada en el medidor de potencia.
3.- Seleccione modo de operación (P pico). 4.- seleccione el modo de pulso. 5.- Seleccionar el ciclo de trabajo (DC) en por ciento. Donde: τ : Ancho del pulso de transmisión. PRT- Periodo de repetición de pulsos.
Atenuador Variable
Medidor de potencia digital
Acoplador Direccional
Nota: Atenuador variable a máximo valor
30 dB
100)( xPRT
Dcτ
=
Operación y Mantenimiento de los Sistemas de Radar Primario
129
6.- Seleccione frecuencia de operación del transmisor radar. 7.- Seleccione los dBm como unidad. 8.-Haga un cero. 9.- Conecte el censor del medidor de potencia al atenuador y lea la potencia pico directa medida. Tome nota de este valor. 10.- Calcule la potencia pico directa tomando en consideración lo siguiente: Pp = (el valor de atenuación del acoplador de entrada en dB + valor de atenuación del atenuador variable en dB + el valor en dBm de la lectura del medidor de potencia). 11.- Calcule la potencia pico utilizando la siguiente formula:
)1
log(10mw
PpdBm =
Donde: Pp. Potencia Pico. 1 mW. = 1 x 10-3 vatios dBm = dB referidos a 1 mW. Log = Logaritmo de base 10. 12.- Restablezca las condiciones operativas.

Operación y Mantenimiento de los Sistemas de Radar Primario
130
Procedimiento P-08 MEDICIÓN DE LA GANANCIA
1.- Desactive la radiación del transmisor radar. 2.- Desactive las funciones auxiliares STC, AGC, por medio del tablero de control del receptor radar, en caso de antena con doble cobertura, seleccione cobertura principal. 3.- En caso de contar con señales de prueba (plots de prueba), desactivar a través del tablero del control. 4.- Sintonía del Generador de Radio Frecuencia (RF). Realice el montaje de prueba como se muestra en la figura FP-08. Ver diagrama a bloques del receptor en anexo C.
Figura FP-08 Medición de la sintonía del canal de recepción.
5.- Conecte la salida del generador a través de un cable de RF a la entrada del atenuador variable. 6.- Ajuste el valor de atenuación de acuerdo a la ganancia de los componentes del receptor. Normalmente el valor de atenuación es del orden de 60 dB.
FI RF Detector
*2
*3 *1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Osciloscopio
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador de entrada
*2 Salida en fase del detector.
*3 Salida en cuadratura del detector.

Operación y Mantenimiento de los Sistemas de Radar Primario
131
7.- Seleccione el modo XY en el osciloscopio. Preajuste el generador de RF como se indica: Señal de salida: Onda Continua CW. Atenuación de salida de RF: Máxima. 8.- Sintonice la frecuencia del generador de RF, maximizando la amplitud del círculo visualizado en el osciloscopio. De esta forma la frecuencia del generador de RF será igual a la del receptor bajo prueba. 9.- Desconecte el generador de RF de la entrada del atenuador variable y conéctelo a la entrada de un medidor de potencia promedio, ajuste el nivel de salida del generador para obtener una lectura de referencia de - 10 dBm, este valor será de acuerdo a la ganancia del receptor radar. 10.- Realice las condiciones de prueba como se muestran en la figura FP-08-1. Ver diagrama a bloques del receptor en anexo C.
Figura FP-08-1 Medición de la ganancia del canal de recepción.
Mezclador RF
*1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Amplificador
FI
*2
Medidor de
Potencia
Promedio
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador
*2 Salida del amplificador de FI.

Operación y Mantenimiento de los Sistemas de Radar Primario
132
11.- Mida el nivel de potencia a la salida del amplificador de FI. 12.- Calcule la ganancia de receptor radar. G= dBm (Nivel de salida del generador de RF) + dB (Atenuador variable) + dBm (nivel de potencia medido a la salida del receptor radar). 13.- En caso de tener antena con doble cobertura. Seleccione a través del tablero de control del receptor la cobertura alta y repita los pasos a partir del punto 9. Entrando al receptor en la cobertura alta. 14.- Restablezca condiciones operativas

Operación y Mantenimiento de los Sistemas de Radar Primario
133
Procedimiento P-09
MEDICIÓN DE LA SENSIBILIDAD 1.- Desactive la radiación del transmisor radar. 2.- Desactive las función auxiliar STC por medio del tablero de control del receptor radar, en caso de antena de doble cobertura seleccione cobertura principal. 3.- En caso de contar con señales de prueba (plots de prueba) desactivar a través del tablero del control. 4.- Sintonía del Generador de Radio Frecuencia (RF). Realice el siguiente montaje de la figura FP-09. Ver diagrama a bloques del receptor en anexo C.
Figura FP-09 Medición de la sintonía del canal de recepción.
5.- Conecte la salida del generador a través de un cable de RF a la entrada del atenuador variable. 6.- Ajuste el valor de atenuación de acuerdo a la ganancia de los componentes del receptor. Normalmente el valor de atenuación es del orden de 60 dB.
FI RF Detector
*2
*3 *1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Osciloscopio
*1 - Limitador Coaxial
- Amplificador de Bajo
Ruido.
- Acoplador de entrada.
- Mezclador.
*2 Salida en fase del detector (coseno).
*3 Salida en cuadratura del detector (seno).
*4 Señal de sincronía radar (Trigger).
Cable de RF

Operación y Mantenimiento de los Sistemas de Radar Primario
134
7.- Seleccione el modo XY en el osciloscopio. Preajuste el generador de RF como se indica: Señal de salida: Onda Continua CW. Atenuación de salida de RF: Máxima. 8.- Sintonice la frecuencia del generador de RF, maximizando la amplitud del círculo visualizado en el osciloscopio. De esta forma la frecuencia del generador de RF, será igual a la del receptor bajo prueba. Prueba de la Sensibilidad 9.- Realice las condiciones de prueba como se muestran en la figura FP-09-1
Figura FP-09-1 Medición de la sensibilidad del receptor.
10.- Conecte el generador de RF al atenuador variable cuyo valor de atenuación esta de acuerdo a la sensibilidad del receptor bajo prueba. Module el generador de RF de onda continua (CW) por medio de un generador de pulsos, donde el ancho de pulso (τ) es del mismo valor del pulso transmitido.
M Mezclador
Amplificador
FI
RF
*1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Detector
*2
ooOsciloscopi
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador
TRANSMISOR
Señal de sincronía.
Osciloscopio
*1
*1 Salida del detector en fase
*2 Salida de detector en cuadratura
Cable de RF

Operación y Mantenimiento de los Sistemas de Radar Primario
135
Programe la siguiente configuración en el generador de RF Fuente de Sincronía: Generador de pulsos. Impedancia externa: 50 Ω. Ancho de pulso: De acuerdo al ancho de pulso (τ). Retardo del pulso: De acuerdo al PRT. Nivel de potencia de salida: 0 dBm. Frecuencia: La del receptor bajo prueba. 11.- Ponga en radiación el generador de RF, ajuste el valor de atenuación del generador de RF y la atenuación del atenuador variable para observar el pulso generado en el osciloscopio. 12.- Atenúe poco a poco la salida del generador de RF hasta que el pulso quede por encima del ruido térmico. Tome nota del valor de atenuación. 13.- Calcule el valor de sensibilidad de la siguiente manera: Tome en cuenta el valor de atenuación del acoplado de entrada de RF (si es que esta entrando al receptor por ahí) + valor de atenuación del atenuador variable + el valor de atenuación del generador de RF+ el valor de atenuación del cable de RF utilizado para la medición. Sume todos los valores de atenuación, el valor de la suma es el valor de la sensibilidad del receptor bajo prueba. 14.- En caso de tener un Sistema de Radar de doble cobertura. Seleccione a través del tablero de control la cobertura auxiliar y repita los pasos desde el punto 10 (entrando con el generador de RF por la entrada auxiliar). 15.- Restablezca las condiciones operativas.

Operación y Mantenimiento de los Sistemas de Radar Primario
136
PROCEDIMIENTO P-10 MEDICIÓN DEL RUIDO TERMICO.
1.- Desactive la radiación del transmisor radar. 2.- Desactive las funciones auxiliares STC, AGC, por medio del tablero de control del receptor radar, en caso de antena de doble cobertura seleccione cobertura principal. 3.- En caso de contar con señales de prueba TTG (plots de prueba) desactivar a través del tablero del control. 4.- Realice el siguiente montaje de prueba de la figura FP-10. Ver diagrama a bloques del receptor en anexo C.
Figura FP-10 Medición del ruido térmico.
5.- Retire los atenuadores presentes a la entrada de RF del receptor Radar. 6.- Conecte un voltímetro RMS con una terminación de 75Ω a la salida de video del receptor Radar. 7.- Mida el valor de ruido en mV. Revisar el manual del fabricante para consultar el valor de ruido térmico, considerar que este valor depende estrictamente de dos factores: Del ruido interno generado por el receptor y por el valor de la ganancia de toda la cadena. 8.- Restablezca las condiciones operativas.
FI RF Detector
*2
*3 *1
RECEPTOR RADAR
Voltímetro
RMS
ENTRADA RF.
*1 - Limitador Coaxial.
- Amplificador de Bajo
Ruido.
- Acoplador de entrada.
- Mezclador.
*2 Salida de video en fase del detector.
*3 Salida de video en cuadratura del detector.
Carga 50 Ω
Carga 75 Ω
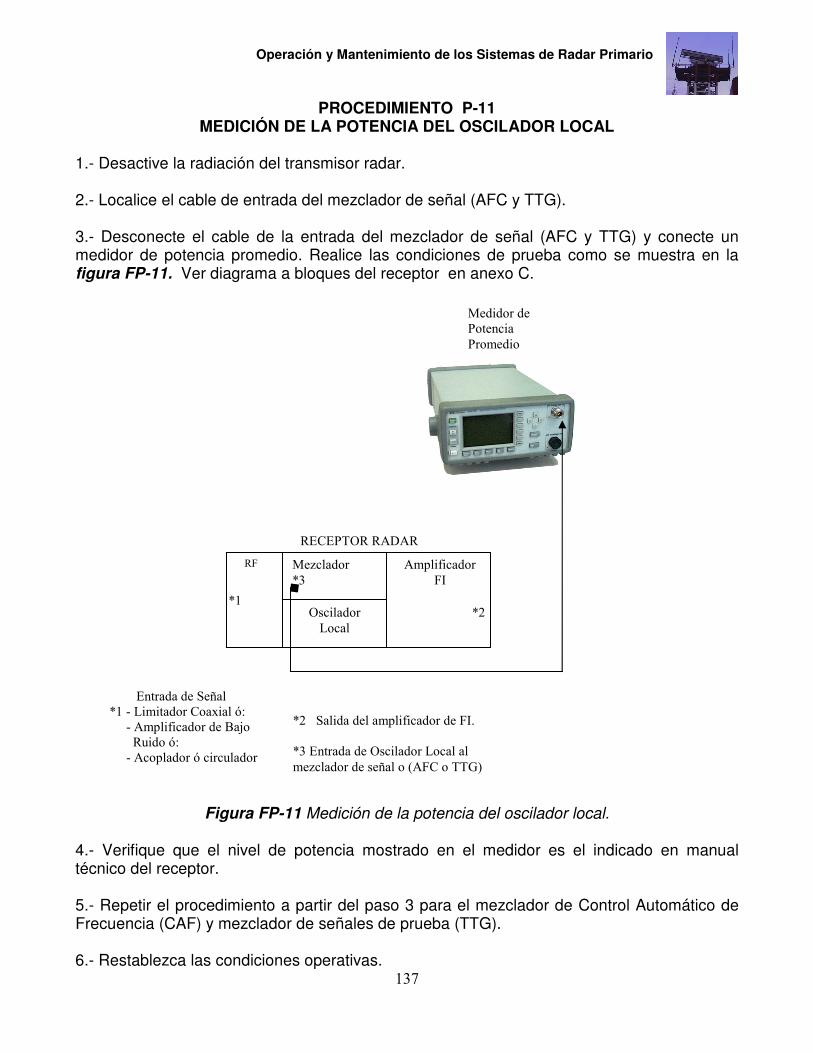
Operación y Mantenimiento de los Sistemas de Radar Primario
137
PROCEDIMIENTO P-11 MEDICIÓN DE LA POTENCIA DEL OSCILADOR LOCAL
1.- Desactive la radiación del transmisor radar. 2.- Localice el cable de entrada del mezclador de señal (AFC y TTG). 3.- Desconecte el cable de la entrada del mezclador de señal (AFC y TTG) y conecte un medidor de potencia promedio. Realice las condiciones de prueba como se muestra en la figura FP-11. Ver diagrama a bloques del receptor en anexo C.
Figura FP-11 Medición de la potencia del oscilador local.
4.- Verifique que el nivel de potencia mostrado en el medidor es el indicado en manual técnico del receptor. 5.- Repetir el procedimiento a partir del paso 3 para el mezclador de Control Automático de Frecuencia (CAF) y mezclador de señales de prueba (TTG). 6.- Restablezca las condiciones operativas.
Mezclador
*3
RF
*1
RECEPTOR RADAR
Amplificador
FI
*2
Medidor de
Potencia
Promedio
Entrada de Señal
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador ó circulador
*2 Salida del amplificador de FI.
*3 Entrada de Oscilador Local al
mezclador de señal o (AFC o TTG)
Oscilador
Local

Operación y Mantenimiento de los Sistemas de Radar Primario
138
PROCEDIMIENTO P-12
MEDICIÓN DE LA POTENCIA DEL OSCILADOR COHERENTE 1.- Desactive la radiación del transmisor radar. 2.- Localice el cable de salida del oscilador coherente hacia detector amplitud fase (DAP). 3.- Realice las condiciones de prueba como se muestra en la figura FP-12. Ver diagrama a bloques del receptor en anexo C.
Figura FP-12 Medición de la potencia del oscilador coherente.
4.- Verifique que el nivel de potencia mostrado en el medidor sea el indicado en el manual técnico del receptor. 5.- Restablezca las condiciones operativas.
RECEPTOR RADAR
Medidor de
Potencia
Promedio
Entrada de Señal
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador ó circulador
*2 Salida del Oscilador Coherente
hacia Detector Amplitud Fase.
RF
*1
MEZCLADOR
OSCILADOR
LOCAL
FI DETECTOR
AMPLITUD FASE
OSCILADOR COHERENTE
*2
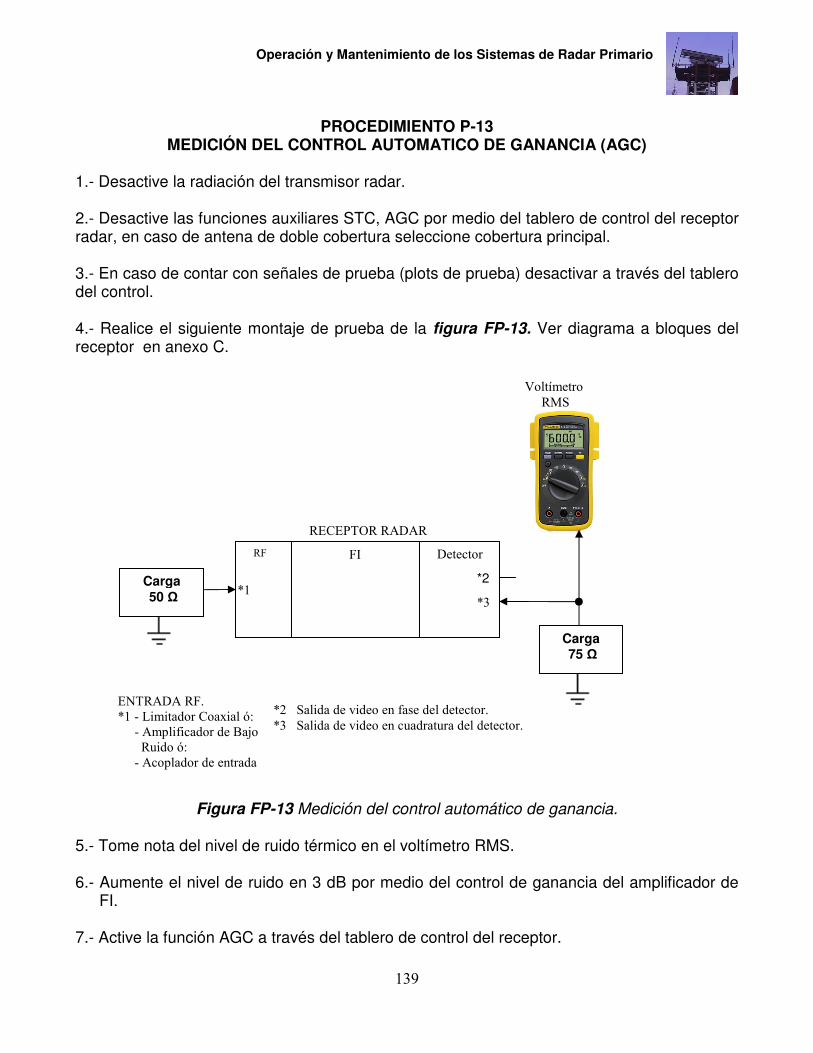
Operación y Mantenimiento de los Sistemas de Radar Primario
139
PROCEDIMIENTO P-13
MEDICIÓN DEL CONTROL AUTOMATICO DE GANANCIA (AGC)
1.- Desactive la radiación del transmisor radar. 2.- Desactive las funciones auxiliares STC, AGC por medio del tablero de control del receptor radar, en caso de antena de doble cobertura seleccione cobertura principal. 3.- En caso de contar con señales de prueba (plots de prueba) desactivar a través del tablero del control. 4.- Realice el siguiente montaje de prueba de la figura FP-13. Ver diagrama a bloques del receptor en anexo C.
Figura FP-13 Medición del control automático de ganancia. 5.- Tome nota del nivel de ruido térmico en el voltímetro RMS. 6.- Aumente el nivel de ruido en 3 dB por medio del control de ganancia del amplificador de
FI. 7.- Active la función AGC a través del tablero de control del receptor.
FI RF Detector
*2
*3 *1
RECEPTOR RADAR
Voltímetro
RMS
ENTRADA RF.
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador de entrada
*2 Salida de video en fase del detector.
*3 Salida de video en cuadratura del detector.
Carga 50 Ω
Carga 75 Ω

Operación y Mantenimiento de los Sistemas de Radar Primario
140
8.- Verifique que la función AGC regresa el voltaje al valor del punto 5. 9.- Desactive la función AGC por medio del tablero de control del receptor. 10.- Ajuste el control de ganancia del amplificador de FI para reducir el nivel de ruido en 3 dB
con respecto al valor registrado en el punto 5. 11.- Active la función AGC por medio del tablero de control del receptor. 12.- Verifique que el circuito AGC forza el nivel de ruido del punto (5) ±2 mV 13.- Desactive la función AGC por medio del tablero del receptor. 14.- Ajuste el control de ganancia del amplificador de FI para obtener un nivel de ruido del
punto 5. 15.- Restablezca condiciones operativas. Nota: En caso de que su voltímetro RMS no tenga lectura en dB, para aumentar el nivel en 3
dB del punto 5, multiplíquelo por 1.41, o si desea disminuir el valor en 3 dB divídalo entre 1.41.

Operación y Mantenimiento de los Sistemas de Radar Primario
141
PROCEDIMIENTO P-14
CONTROL AUTOMATICO DE FRECUENCIA (AFC) 1.- Desactive la radiación del transmisor radar. 2.- Localice el modulo de Control Automático de Frecuencia y ubique la entrada proveniente
del mezclador CAF. 3.- Realice el siguiente montaje de prueba de la figura FP-14.
Figura FP-14 Medición del control automático de frecuencia. 4.- Conecte el generador de RF al atenuador variable cuyo valor de atenuación esta de acuerdo a la sensibilidad del receptor bajo prueba. Module el generador de RF de onda continua por medio de un generador de pulsos, donde el ancho de pulso (τ) es el mismo pulso transmitido, programe la siguiente configuración en el generador de RF Fuente de Sincronía: Generador de pulsos Impedancia externa: 50 Ω Ancho de pulso: De acuerdo al ancho de pulso (τ) Retardo del pulso: De acuerdo al PRT Nivel de potencia de salida: 0 dBm Frecuencia: FI
CONTROL AUTOMATICO
DE FRECUENCIA (CAF)
Atenuador
Variable
Generador de RF
Osciloscopio
*1 – Entrada al modulo CAF
proveniente del Mezclador.
*2 Salida de control del CAF.
*3 Salida de prueba del CAF.
Cable de RF
Circuitos
Sintonizados Interfase
*3
*2 *1
TRANSMISOR
Señal de sincronía

Operación y Mantenimiento de los Sistemas de Radar Primario
142
5.- Conecte la salida del generador a través de un cable de RF a la entrada del atenuador variable. 6.- Ajuste el valor de atenuación de acuerdo al nivel de referencia de la señal de salida del mezclador CAF (muestra de la transmisión trasladada a la FI). 7.- Ajuste la frecuencia del generador de RF al valor de la FI, ponga en radiación el generador de RF. Verifique que en la salida de control del CAF no existe corrección de frecuencia. 8.- Incremente la frecuencia del generador de RF para activar la operación del CAF (de acuerdo al sistema de radar bajo prueba), posteriormente disminuya la frecuencia hasta que el circuito CAF se desactive. Observe que el nivel de la señal sea el obtenido en el punto 7, corrobore que el valor de frecuencia del generador de RF corresponda a la frecuencia FI. 9.- Disminuya la frecuencia del generador de RF para activar la operación del circuito CAF (de acuerdo al sistema de radar bajo prueba). Posteriormente aumente la frecuencia hasta que el circuito CAF se desactive. Observe que el nivel de la señal sea el obtenido en el punto 7, corrobore que el valor de frecuencia del generador de RF corresponda a la frecuencia FI. 10.- Restablezca las condiciones operativas.

Operación y Mantenimiento de los Sistemas de Radar Primario
143
PROCEDIMIENTO P-15 MEDICIÓN DEL TIEMPO DE DESIONIZACIÓN
1.- Desactive la radiación del transmisor radar. 2.- Desactive las función auxiliar STC por medio del tablero de control del receptor radar, en caso de antena de doble cobertura seleccione la cobertura principal. 3.- En caso de contar con señales de prueba (plots de prueba) desactivar a través del tablero del control. 4.- Sintonía del Generador de Radio Frecuencia (RF). Realice el siguiente montaje de prueba de la figura FP-15. Ver diagrama a bloques del receptor en anexo C.
Figura FP-15 Medición de la sintonía del canal de recepción.
5.- Conecte la salida del generador a través de un cable de RF a la entrada del atenuador variable. 6.- Ajuste el valor de atenuación de acuerdo a la ganancia de los componentes del receptor. Normalmente el valor de atenuación es del orden de 60 dB.
FI RF Detector
*2
*3 *1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Osciloscopio
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador de entrada
*2 Salida en fase del detector.
*3 Salida en cuadratura del detector.
*4 Señal de sincronía radar (Trigger).
Cable de RF

Operación y Mantenimiento de los Sistemas de Radar Primario
144
7.- Seleccione el modo XY en el osciloscopio. Preajuste el generador de RF como se indica: Señal de salida: Onda Continua CW. Atenuación de salida de RF: Máxima. 8.- Sintonice la frecuencia del generador de RF maximizando la amplitud del círculo visualizado en el osciloscopio. De esta forma la frecuencia del generador de RF será igual a la del receptor bajo prueba. Prueba de Tiempo desionización. 9.- Realice las condiciones de prueba como se muestran en la siguiente figura FP-15-1. Ver diagrama a bloques del receptor en anexo C.
Figura P-15-1 Medición del tiempo de desionización. 10.- Coloque en radiación el transmisor radar. Observe la información de video a la salida del detector en el osciloscopio.
M Mezclador
Amplificador
FI
RF
*1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Detector
*3
*1 - Acoplador
de RF.
TRANSMISOR
Señal de sincronía.
Osciloscopio
*2
*2 Salida del detector en fase
*3 Salida de detector en cuadratura
Cable de RF
Duplexor
*1
RF
Antena

Operación y Mantenimiento de los Sistemas de Radar Primario
145
11.- Varié la frecuencia del transmisor radar hasta que disminuya considerablemente la señal de clutter a la salida del detector. 12.- Conecte el generador de RF al atenuador variable cuyo valor de atenuación esta de acuerdo a la sensibilidad del receptor bajo prueba. Module el generador de RF de onda continua por medio de un generador de pulsos, donde el ancho de pulso (τ) es el mismo pulso transmitido. Programe la siguiente configuración en el generador de RF. Fuente de Sincronía: Generador de pulsos Impedancia externa: 50 Ω Ancho de pulso: De acuerdo al ancho de pulso (τ) Retardo del pulso: De acuerdo al PRT Nivel de potencia de salida: 0 dBm Frecuencia: La del canal, ya sintonizada. 13.- Ponga en radiación el generador de RF, ajuste el valor de atenuación del generador de RF y la atenuación del atenuador variable para observar el pulso generado en el osciloscopio. Tome referencia de un nivel y aumente 3 dB el nivel del pulso. 14.- Desplace el pulso con el control retardo de pulso, hasta que disminuya 3 dB (nivel de referencia). 15.- Tome nota del tiempo de la ubicación del pulso con respecto al origen. El valor de este tiempo (tiempo de desionización) no deberá ser mayor a 15 µs. 16.- Restablezca las condiciones operativas.

Operación y Mantenimiento de los Sistemas de Radar Primario
146
PROCEDIMIENTO P-16 MEDICIÓN DEL ANCHO DE BANDA
1.- Desactive la radiación del transmisor radar. 2.- Desactive las función auxiliar STC por medio del tablero de control del receptor radar, en caso de antena de doble cobertura seleccione cobertura principal. 3.- En caso de contar con señales de prueba (plots de prueba) desactivar a través del tablero del control. 4.- Sintonía del Generador de Radio Frecuencia (RF). Realice el montaje de prueba de la figura FP-16. Ver diagrama a bloques del receptor en anexo C.
Figura FP-16 Medición de la sintonía del canal de recepción. 5.- Conecte la salida del generador a través de un cable de RF a la entrada del atenuador variable. 6.- Ajuste el valor de atenuación de acuerdo a la ganancia de los componentes del receptor. Normalmente el valor de atenuación es del orden de 60 dB.
FI RF Detector
*2
*3 *1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Osciloscopio
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador de entrada
*2 Salida en fase del detector.
*3 Salida en cuadratura del detector.
*4 Señal de sincronía radar (Trigger).
Cable de RF

Operación y Mantenimiento de los Sistemas de Radar Primario
147
7.- Seleccione el modo XY en el osciloscopio. Preajuste el generador de RF como se indica: Señal de salida: Onda Continua CW. Atenuación de salida de RF: Máxima. 8.- Sintonice la frecuencia del generador de RF maximizando la amplitud del círculo visualizado en el osciloscopio. De esta forma la frecuencia del generador de RF será igual a la del receptor bajo prueba. Ancho de Banda. 10.- Realice las condiciones de prueba como se muestra en la figura FP-16-1. Ver diagrama a bloques del receptor en anexo C.
Figura FP-16-1 Medición del ancho de banda de receptor.
M Mezclador
Amplificador
FI
RF
*1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Detector
*2
ooOsciloscopi
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador
TRANSMISOR
Señal de sincronía.
Osciloscopio
*1
*1 Salida del detector en fase
*2 Salida de detector en cuadratura
Cable de RF

Operación y Mantenimiento de los Sistemas de Radar Primario
148
8.- Conecte el generador de RF al atenuador variable cuyo valor de atenuación esta de acuerdo a la sensibilidad del receptor bajo prueba. Module el generador de RF de onda continua por medio de un generador de pulsos, donde el ancho de pulso (τ) es el mismo pulso transmitido Programe la siguiente configuración en el generador de RF: Fuente de Sincronía: Generador de pulsos Impedancia externa: 50 Ω Ancho de pulso: De acuerdo al ancho de pulso (τ) Retardo del pulso: De acuerdo al PRT Nivel de potencia de salida: 0 dBm Frecuencia: La del canal bajo prueba. 9.- Ponga en radiación el generador de RF, ajuste el valor de atenuación del generador de RF y la atenuación del atenuador variable para observar el pulso generado en el osciloscopio. 10.- Atenúe poco a poco la salida del generador de RF hasta que el pulso se observe claramente, tome nota del valor de atenuación (*). Incremente el valor de atenuación en 3 dB. 11.- Efectúe una desviación de frecuencia de la señal del generador de RF hacia arriba y hacia abajo de la frecuencia central de transmisión. Hasta que la señal del pulso generado retorne al valor medido (*) en el punto 10. 12.- La diferencia entre la frecuencia superior e inferior donde la señal cae 3 dB es el ancho de banda del receptor radar. Tome nota del valor. 12.- En caso de tener un Sistema de Radar de doble cobertura. Seleccione a través del tablero de control la cobertura auxiliar y repita los pasos desde el punto 10 (entrando con el generador de RF por la entrada auxiliar). 13.- Restablezca las condiciones operativas.

Operación y Mantenimiento de los Sistemas de Radar Primario
149
PROCEDIMIENTO P-17
VERIFICACIÓN DE LOS MAPAS OPERATIVOS DEL PROCESADOR DE SEÑAL 1.- Seleccione mediante el procedimiento adecuado la presentación de los diferentes mapas en el monitor de mantenimiento. Estos mapas son: - Combinador de haces de antena (Mapa de Clutter Fijo) - Control de sensibilidad en el tiempo (Mapa de STC). - De clutter (Mapa de Clutter). - Baja velocidad doppler (Mapa doopler) - Selección de peso del filtro doppler (Mapa de peso del filtro) - Filtro doppler (F0,F1,F2,F3,F4,F5,F6,F7) - Normalizador de Falsas Alarmas (Mapa FAN) - Lluvia (Mapa de Lluvia) 2.- Verifique la información residente en cada mapa. 3.- Efectué una carga manual o automática (el valor puede ser proporcionado por un generador, un valor determinado o un patrón predeterminado) de cada uno de los mapas si se tiene la herramienta disponible. Verifique que la información programada, se cargue adecuadamente. 4.- Restablezca la información residente en los mapas ya sea de manera automática o manual. 5.- Restablezca las condiciones operativas. Resumen: Este procedimiento se aplica en el procesador de señal radar, y nos sirve para evaluar el estado de los diferentes mapas utilizados en el procesador de señal radar.
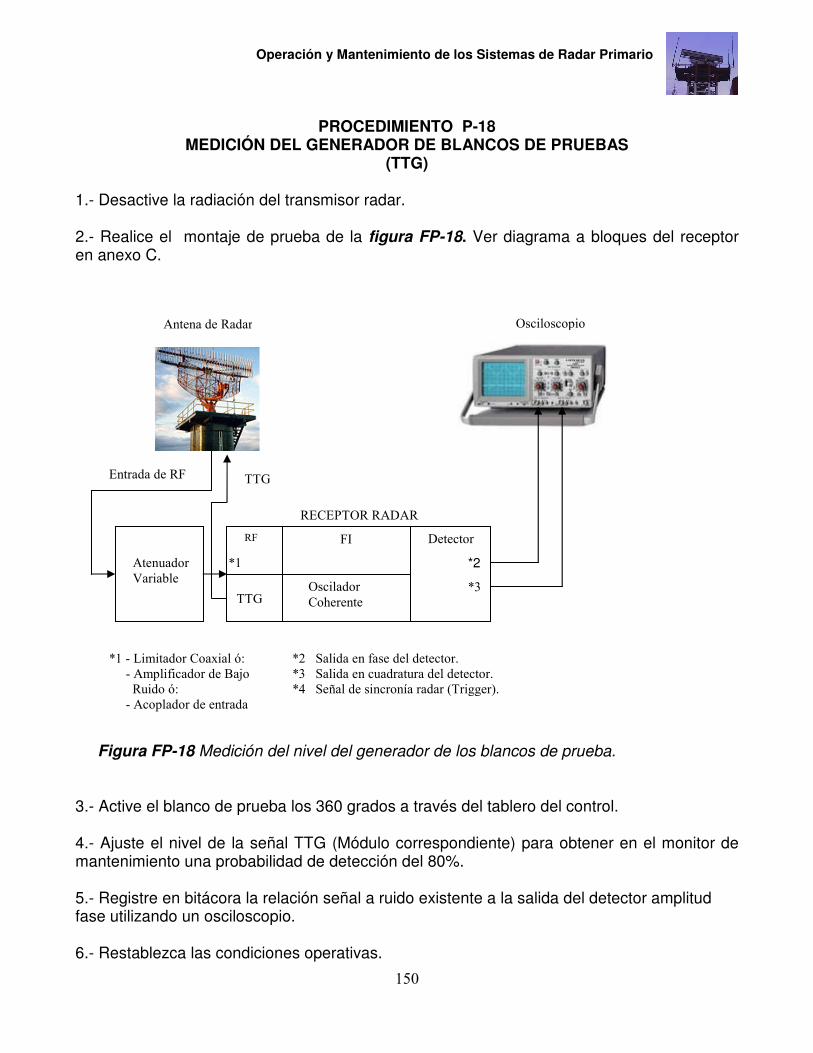
Operación y Mantenimiento de los Sistemas de Radar Primario
150
PROCEDIMIENTO P-18
MEDICIÓN DEL GENERADOR DE BLANCOS DE PRUEBAS (TTG)
1.- Desactive la radiación del transmisor radar. 2.- Realice el montaje de prueba de la figura FP-18. Ver diagrama a bloques del receptor en anexo C.
Figura FP-18 Medición del nivel del generador de los blancos de prueba. 3.- Active el blanco de prueba los 360 grados a través del tablero del control. 4.- Ajuste el nivel de la señal TTG (Módulo correspondiente) para obtener en el monitor de mantenimiento una probabilidad de detección del 80%. 5.- Registre en bitácora la relación señal a ruido existente a la salida del detector amplitud fase utilizando un osciloscopio. 6.- Restablezca las condiciones operativas.
FI RF Detector
*2
*3
*1
RECEPTOR RADAR
Atenuador
Variable
Antena de Radar Osciloscopio
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador de entrada
*2 Salida en fase del detector.
*3 Salida en cuadratura del detector.
*4 Señal de sincronía radar (Trigger).
Entrada de RF
Oscilador
Coherente TTG
TTG

Operación y Mantenimiento de los Sistemas de Radar Primario
151
PROCEDIMIENTO P-19
MEDICIÓN DE LA EXTRACCION DE PLOTS 1.- Desactive la radiación del transmisor radar. 2.- Realice el montaje de prueba de la figura FP-19.
Figura FP-19 Medición de la extracción de los plots de los blancos de prueba. 3.- Active los blancos de prueba (plots) de prueba a través del tablero de control seleccionando distancia, orientación, y amplitud del valor esperado a través del tablero de control. 4.- Verifique la presencia de la señal de video y del símbolo del plot. 5.- Verifique la no generación de alarmas (Receptor analógico y procesador de señal). 6.- Restablezca las condiciones operativas.
Plots
Video
P/S
C/E
FI RF Detector
*2
*3
*1
RECEPTOR RADAR
Atenuador
Variable
Antena de Radar
Indicador PPI
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador de entrada
*2 Salida en fase del detector.
*3 Salida en cuadratura del detector.
*4 Señal de sincronía radar (Trigger).
Entrada de RF
Oscilador
Coherente TTG
TTG
P/S: Procesador de señal.
C/E: Extractor de Video

Operación y Mantenimiento de los Sistemas de Radar Primario
152
PROCEDIMIENTO P-20 PRUEBA DE LA PROTECCION DE SOBRECORRIENTE EN EL TRANSMISOR
1.- Desactive la radiación del transmisor radar. 2.- Realice el montaje de prueba de la figura FP-20.
Figura FP-20 Medición de las seguridades del transmisor. 3.- Localice el dispositivo de seguridad y conecte el punto A y el punto B en las entradas de dicho sensor. 4.- Aumente gradualmente el voltaje de la fuente de alimentación hasta alcanzar el valor de la corriente de protección especificada (ver Manual Técnico respectivo). 5.- Verifique la activación de la alarma correspondiente. 6.- En caso de que no esté activada la señalización de alarma, ajustar el potenciómetro correspondiente hasta que se active la alarma. 7.- Restablezca las condiciones operativas.
- +
A
B
Fuente de Voltaje Medidor de Corriente

Operación y Mantenimiento de los Sistemas de Radar Primario
153
PROCEDIMIENTO P-21
MEDICIÓN DEL AMARRE DE FASE DEL OSCILADOR COHERENTE 1.- Active la Radiación del transmisor radar. 2.- Conecte la salida de la señal de amarre de fase (muestra de Transmisión a 30 MHz.) y conéctela al canal (1) del osciloscopio. 3.- Localice la salida de la señal de control del oscilador coherente y conéctela al Canal (2) del Osciloscopio. 4.- Conecte la salida del oscilador coherente a la entrada del canal (3) del osciloscopio. 5.- Realice las condiciones de prueba como se muestra en la figura FP-21.
Figura FP-21 Medición del amarre de fase del oscilador coherente. 6.- Posicione la señal de control en la parte más estable de la señal de amarre de fase (muestra de la transmisión a 30 MHz.). 7.- Restablezca las condiciones operativas.
RECEPTOR RADAR
Osciloscopio
Entrada de Señal
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador ó circulador
1.- Salida del Oscilador Coherente 30 MHtz.
2.- Señales de Control del Oscilador Coherente
RF
*1
MEZCLADOR
Control
Automático
de Frecuencia.
FI DETECTOR
AMPLITUD FASE
TRANSMISOR
Muestra de RF.
OSCILADOR COHERENTE
1
2

Operación y Mantenimiento de los Sistemas de Radar Primario
154
PROCEDIMIENTO P-22
MEDICION DEL COMBINADOR DE HACES
1.- Ajuste el nivel de la señal de salida para la carga de mapas de acuerdo al manual correspondiente. 2.- Realice las condiciones de prueba como se muestra en la figura FP-22. Ver diagrama a bloques de la unidad de RF en anexo C.
Figura FP-22 Medición del combinador de haces. 3.- Realice los siguientes ajustes: Osciloscopio:
- Modo XY. Generador de RF:
- Señal de salida Onda Continua. - Ajuste el nivel de entrada a -10 dBm - Ajuste la Frecuencia del canal bajo prueba.
M Mezclador
Amplificador
FI
RF
*1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Detector
*2
ooOsciloscopi
*1 - Limitador Coaxial ó
- Amplificador de Bajo
Ruido ó
- Acoplador
TRANSMISOR
Señal de sincronía.
Osciloscopio
*1
*1 Salida del detector en fase
*2 Salida de detector en cuadratura
Cable de RF

Operación y Mantenimiento de los Sistemas de Radar Primario
155
Procesador de Señales (P/S):
- Active la Función del conminador de haces a través del tablero de control. - Realice la carga del mapa del combinador de haces.
4.- Verifique el mapa de combinador de haces en la pantalla de mantenimiento. 5.- Lea el contenido de cada celda del mapa, este debe tener el valor correspondiente a un nivel alto de RF. 6.- Desactive la salida de del generador de RF. 7.- Realice la carga del mapa combinador de haces. 8.- Verifique en la pantalla que ninguna celda del mapa es visualizada. 9.- Desconecte el equipo de prueba con el objetivo de reestablecer las condiciones operativas. 10.- Coloque el Transmisor en Radiación Reestablezca las condiciones operativas en el tablero de control. 11.- Cargue el mapa de combinador de haces por medio del procedimiento correspondiente mediante el tablero de control. 12.- Restablezca las condiciones operativas

Operación y Mantenimiento de los Sistemas de Radar Primario
156
PROCEDIMIENTO P-23 VERIFICACIÓN DE LA ORIENTACION DE LOS BLANCOS RADAR
Ajuste Inicial 1.- Realice el montaje de prueba de la figura FP-23.
Figura FP-23. Medición de la orientación de los blancos radar. 2.- Obtenga los valores de longitud y latitud de la localización de la estación Radar y de un blanco fijo de referencia. Aplique el programa de localización para obtener la distancia y el acimut entre ambos puntos. 3.- Verifique que el acimut proporcionado por el programa de localización coincida con el acimut obtenido en el monitor. En caso de que no coincida la lectura continúe con los pasos siguientes. 4.- Activar la Radiación del sistema y visualizar la presencia de blancos fijos en el indicador.
Codif. 2
Codif. 1
Señal de
Rotación
Señal de
Referencia
Plots
Video
P/S
C/E
FI RF Detector
*2
*3
*1
RECEPTOR RADAR
Atenuador
Variable
Generador de RF
Indicador PPI
*1 - Limitador Coaxial ó:
- Amplificador de Bajo
Ruido ó:
- Acoplador de entrada
*2 Salida en fase del detector.
*3 Salida en cuadratura del detector.
*4 Señal de sincronía radar (Trigger).
Entrada de RF
Oscilador
Coherente TTG
TTG
P/S: Procesador de señal.
C/E: Extractor de Video
Equipo de
Orientación de el
acimut de Antena

Operación y Mantenimiento de los Sistemas de Radar Primario
157
5.- Localice el blanco fijo de referencia en el indicador Radar. 6.- Verifique la distancia y el acimut del blanco fijo de referencia. 7.- Seleccionar el codificador de antena correspondiente. 8.- Realice el ajuste manual del codificador de la antena hasta obtener un acimut del blanco de referencia menor a 10 grados. 9.- Ajuste en el equipo de orientación de acimut de antena, los grados necesarios para que el blanco de referencia aparezca con la orientación obtenida en el punto 2 10.- Conmute al otro codificador de antena y realice lo pasos anteriores desde el punto 3 hasta el punto 7. Verificación de la orientación de los Blancos Radar 11.- Repita los pasos anteriores desde el punto 4 hasta el punto 10. 12.- Restablezca condiciones operativas.

Operación y Mantenimiento de los Sistemas de Radar Primario
158
PROCEDIMIENTO P-24
MEDICION DEL SISTEMA DE TIERRAS Medición del Sistema de Tierra de la estación radar utilizando un medidor KYORITSU modelo 4102 1.- Localización de los electrodos de puesta a tierra así como de la interconexión de los mismos, con el cable que forma el anillo del sistema. 2.- Revisión de las conexiones en los electrodos, si son del tipo mecánico, deberán limpiar y apretar si el caso lo requiriese. 3. Medición de la resistencia del sistema en cada uno de los electrodos implementado el siguiente montaje de prueba como se muestra en la figura FP-24.
Figura FP-24. Medición del sistema de tierras 4.- Verificación del voltaje de tierra. Con el botón ACV presionado verificar que el voltaje leído es menor a 10 VCA. Si el voltaje es mayor, la medición no es precisa.

Operación y Mantenimiento de los Sistemas de Radar Primario
159
5.- Verificación del voltaje de batería. Mantenga oprimido el botón Off/BATT Check. Verifique que el voltaje de batería este dentro del área de GOOD ver figura FP-24-1, de no ser así remplazar las baterías. 6.- Verificación de las conexiones de las varillas auxiliares (conexiones C1, P1 ) y las terminales P y C del medidor. Verifique que la lámpara indicadora esta encendida, si es así la medición de la resistencia de tierra puede ser hecha. Si no se ilumina la lámpara esto indica que hay un cable desconectado o que la resistencia de las varillas auxiliares es muy alta. Verifique la conexión de P1 y C1 o cambie de lugar las varillas auxiliares o humedezca la tierra con agua. Con esto la lámpara se iluminara ver figura FG-24-1.
Figura FG-24-1 Prueba de batería y lámpara indicadora.
7.- Medición de la resistencia de tierra en cada uno de los electrodos. Primero presione la tecla X10Ω y después el botón MEAS. Ajuste la escala para tener una lectura apropiada en el medidor. Durante la medición la lámpara deberá estar encendida, si existe una condición anormal verifique las conexiones de las terminales de las varillas de prueba y las terminales del medidor. 8.- Si después de medir la resistencia del sistema, el valor obtenido es mayor a 20 Ω. Entonces se deberá hidratar los electrodos con solución electrolítica y/o enriquecer el electrodo con carbón mineral o bentonita o gem electrolítico. 9.- Restablezca las condiciones operativas.

Operación y Mantenimiento de los Sistemas de Radar Primario
160
PROCEDIMIENTO P-25 PRUEBA BERT
(MEDICION DE TASA DE ERROR) 1.- Localice el punto de conexión para la transmisión de datos en el enlace, ubicado en la Estación Radar. 2.- Localice el punto de conexión para la recepción de datos en el enlace, ubicado en el Centro de Control. 3.- Realice el siguiente montaje de prueba como se muestra en la figura FP-25 .
Figura FP-25 Configuración del equipo prueba BERT. 4.- Programe el Analizador de Protocolos ubicado en la estación radar como generador de mensajes de prueba BERT con reloj externo. 5.- Programe el Analizador de Protocolos ubicado en el centro de control como receptor de mensajes de prueba BERT con reloj externo. 6.- Ambos Analizadores de Protocolos deberán ser configurados como DTE puesto que su función es Generar y Recibir información para Medir la Tasa de Error del enlace de datos Radar. 7.- Situado en la estación Radar y coordinando con el personal ubicado al otro extremo del enlace de datos Radar inicie la prueba BERT considerando la hora exacta a la que empezó. 8.- El tiempo mínimo que se debe de ejecutar la prueba BERT para obtener una tasa de error a una velocidad de transmisión de datos de 9600 bits/seg. es de 2:54 (2 horas 54 minutos). 9.- La tasa BERT es de 10-8 es decir de 1 error por cada 100,000,000 de bits transmitidos.
Estación Radar Centro de Control
DCE DCE DTE
Enlace de
Datos Radar. - Radio enlace - Est Terrena - Modem - NTU
Enlace de
Datos Radar. - Radio enlace - Est Terrena - Modem - NTU
Generador de prueba BERT
Receptor de prueba BERT

Operación y Mantenimiento de los Sistemas de Radar Primario
161
10.- Una vez transcurrido el tiempo mínimo de la prueba BERT coordine con el personal ubicado al otro extremo del enlace de datos Radar que ha concluido la prueba, para posteriormente cuantificar el numero de errores obtenidos. 11.- Restablezca las condiciones operativas del enlace de datos en ambos extremos. NOTA: Tome en cuenta que el servicio del enlace quedara suspendido por lo que de ser necesario deberá coordinarlo con el personal correspondiente.

Operación y Mantenimiento de los Sistemas de Radar Primario
162
PROCEDIMIENTO P-26 ANALISIS DE DATOS RADAR
1.- Localice el punto de conexión entre la salida del Procesador de Cabeza Radar (RHP) y el enlace de datos radar. 2.- Realice el siguiente montaje de prueba como se muestra en la figura FP-26
Figura FP-26 Configuración del equipo Análisis de datos radar. 3.- Configuración del analizador de protocolos: De acuerdo al montaje de prueba mostrado en la figura FP-26 el analizador de protocolos se debe configurar de la siguiente manera: a.- Accesar al Setup del analizador de protocolos. b.- Seleccionar el tipo de protocolo de datos a analizar: bsc para el caso de Aircat 500 hdlc para el caso de Asterix c.- Seleccione la velocidad de transmisión de datos: En la mayoría de los radares de México la velocidad de transmisión de datos es de 9600 b/s d.- Por último configure el analizador de protocolos como DTE Monitoreo. es decir que el reloj del DTE es proporcionado por el DCE (pin 15).
Procesad
or
Enlace de
Datos Radar. - Radio enlace - Est Terrena - Modem - NTU
Estación Radar

Operación y Mantenimiento de los Sistemas de Radar Primario
163
3.6 Calendario de Mantenimiento Preventivo Objetivo: Asentar en un documento grafico la programación de las fechas de realización de los mantenimientos preventivos. Conformación: El calendario de mantenimiento esta compuesto por una serie de columnas, la primera de ellas describe los códigos de los programas de mantenimiento a realizar, la segunda columna describe los equipos que conforman el Sistema Radar y las restantes 12 columnas corresponden a los meses del año. Por lo tanto a cada equipo tendrá una opción mensual de actividad. Cada celda es conformada por el cruce del mes y equipo están subdividida en cuatro partes, las cuales son las 4 semanas del mes tal y como se observa en la Figura 3.1. En el calendario de mantenimiento Figura 3.2 se indica la semana del mes donde se debe realizar el trabajo, dejando a criterio del supervisor técnico el día para efectuar el trabajo de acuerdo a las necesidades del servicio.
1.- Primera Semana del mes. 2.- Segunda Semana del mes. 3.- Tercera semana del mes. 4.- Cuarta Semana del mes. Figura 3.1 Celda de actividad mensual
La programación de los mantenimientos preventivos diario y semanal no se considera en el calendario de mantenimiento preventivo. Las claves de los programas de mantenimiento son:
MEN – Mantenimiento mensual. SMS - Mantenimiento semestral. ANU- Mantenimiento anual.
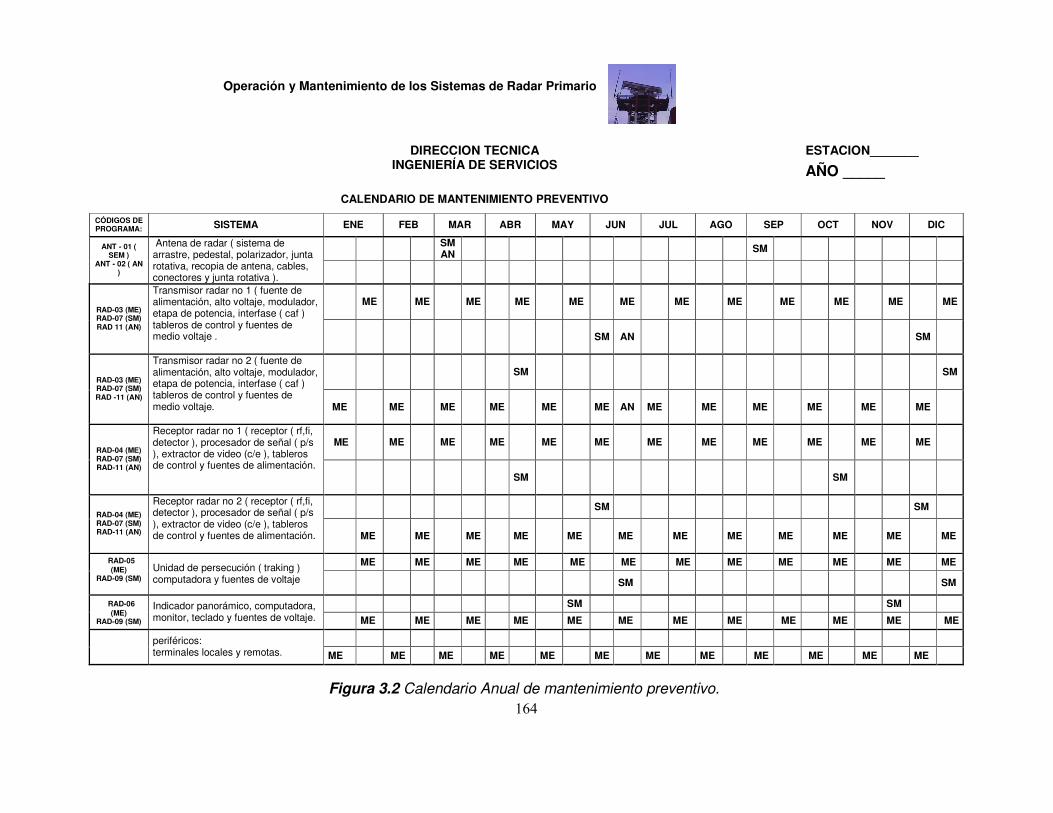
Operación y Mantenimiento de los Sistemas de Radar Primario
164
Figura 3.2 Calendario Anual de mantenimiento preventivo.
DIRECCION TECNICA ESTACION_______ INGENIERÍA DE SERVICIOS AÑO _____
CALENDARIO DE MANTENIMIENTO PREVENTIVO
CÓDIGOS DE PROGRAMA: SISTEMA ENE FEB MAR ABR MAY JUN JUL AGO SEP OCT NOV DIC
SM AN SM ANT - 01 (
SEM ) ANT - 02 ( AN
)
Antena de radar ( sistema de arrastre, pedestal, polarizador, junta rotativa, recopia de antena, cables, conectores y junta rotativa ).
ME
ME ME ME ME ME ME ME ME ME ME ME RAD-03 (ME) RAD-07 (SM) RAD 11 (AN)
Transmisor radar no 1 ( fuente de alimentación, alto voltaje, modulador, etapa de potencia, interfase ( caf ) tableros de control y fuentes de medio voltaje .
SM AN SM
SM
SM RAD-03 (ME) RAD-07 (SM) RAD -11 (AN)
Transmisor radar no 2 ( fuente de alimentación, alto voltaje, modulador, etapa de potencia, interfase ( caf ) tableros de control y fuentes de medio voltaje.
ME ME ME ME ME ME AN ME ME ME ME ME ME
ME
ME ME ME ME ME ME ME ME ME ME ME RAD-04 (ME) RAD-07 (SM) RAD-11 (AN)
Receptor radar no 1 ( receptor ( rf,fi, detector ), procesador de señal ( p/s ), extractor de video (c/e ), tableros de control y fuentes de alimentación.
SM SM
SM SM
RAD-04 (ME) RAD-07 (SM) RAD-11 (AN)
Receptor radar no 2 ( receptor ( rf,fi, detector ), procesador de señal ( p/s ), extractor de video (c/e ), tableros de control y fuentes de alimentación.
ME ME ME ME ME ME ME ME ME ME ME ME
ME ME ME ME ME ME ME ME ME ME ME ME RAD-05 (ME)
RAD-09 (SM)
Unidad de persecución ( traking ) computadora y fuentes de voltaje SM SM
SM SM RAD-06 (ME)
RAD-09 (SM)
Indicador panorámico, computadora, monitor, teclado y fuentes de voltaje. ME ME ME ME ME ME ME ME ME ME ME ME
periféricos:
terminales locales y remotas. ME ME ME ME ME ME ME ME ME ME ME ME

Operación y Mantenimiento de los Sistemas de Radar Primario
165
3.6.1 Orden de Trabajo Este documento es elaborado de acuerdo al programa del Calendario de Mantenimiento Preventivo, en el cual se solicita al Personal Técnico la aplicación del programa correspondiente de mantenimiento preventivo al equipo de Radar. Este documento es una Instrucción de Trabajo elaborada por el responsable de la Operación y el Mantenimiento del equipo Radar. El formato de la orden de Trabajo se muestra en la siguiente figura 3.3.
Figura 3.3 Orden de Trabajo
ORDEN DE TRABAJO
Área de especialidad:
Ubicación del servicio: Folio: Fecha:
La presente orden está destinada al mantenimiento y atención de los sistemas y equipos, bajo la responsabilidad del área de Ingeniería de Servicios. Descripción de Actividades: __________________________________________________ __________________________________________________ __________________________________________________ __________________________________________________ __________________________________________________ __________________________________________________ __________________________________________________ __________________________________________________
Hora de Inicio:_______________ Hora de Termino:____________ Notificación Oficial:__________
Solicitante:
Realizado Por: Recibí de Conformidad:
Nombre y Firma Nombre y Firma Nombre y Firma
Operación y Mantenimiento de los Sistemas de Radar Primario
166
3.6.2 Reporte Técnico de Servicio Este documento es elaborado por el Personal Técnico responsable de la aplicación de los programas de Mantenimiento Preventivo, como respuesta a la Orden de Trabajo correspondiente. El formato de la orden de trabajo se muestra en la figura 3.4.
Figura 3.4 Reporte Técnico.
REPORTE TÉCNICO DE SERVICIO
Área de especialidad:
Ubicación del servicio: Folio: Fecha:
Servicios realizados al Sistema o Equipo: ________________________________________________________________________________ ________________________________________________________________________________ ________________________________________________________________________________ ________________________________________________________________________________ ________________________________________________________________________________ ________________________________________________________________________________ Observaciones: ________________________________________________________________________________ ________________________________________________________________________________ ________________________________________________________________________________
Solicitante:
Realizado Por: Recibí de Conformidad:
Nombre y Firma Nombre y Firma Nombre y Firma

Operación y Mantenimiento de los Sistemas de Radar Primario
167
3.7 Mantenimiento Correctivo 3.7.1 Introducción. La realización del mantenimiento correctivo a nivel de campo consiste en localizar y sustituir la tarjeta o modulo dañado por una parte de reserva y si es necesario un reajuste, con el objetivo de normalizar el funcionamiento del equipo. Las necesidades de mantenimiento correctivo pueden ser detectadas por:
- Características del equipo fuera de tolerancia detectadas durante el mantenimiento preventivo.
- Condiciones de falla indicadas por lámparas de señalización de alarma (BIT). - Condiciones de falla indicadas por los indicadores del equipo de prueba
integrado (BITE). Las facilidades para efectuar el mantenimiento correctivo son:
- Diagrama de localización de falla. - Indicadores de falla con el circuito o parte asociada. - Puntos de prueba a lo largo del sistema. - Procedimiento de ajuste para alinear la parte cambiada.
La localización de fallas incluye acciones las cuales por medio de tablas y/o diagramas de flujo guían al personal técnico para localizar la tarjeta o módulo dañado. Estas tablas describen a través de símbolos y oraciones las acciones que se deben realizar para encontrar el módulo en falla, esta manera grafica le da al personal técnico un mejor panorama general del problema. Obviamente no es posible tener un diagrama de localización de fallas para cada tipo de falla, aun así las existentes nos dan una referencia de cómo se debe hacer frente una falla técnica. Las facilidad del equipo de prueba integrado (BITE) permite continuamente verificar las funciones más importantes. En caso de de alguna falla o mal funcionamiento de alguna parte del equipo, una lámpara se encenderá y un código aparece en una pantalla indicadora, este código nos señalara la parte dañada. Las actividades del mantenimiento correctivo consisten de:
- Identificar la falla. - Aislar la falla. - Conmutar de equipo. - Localizar la parte dañada. - Solicitar la parte dañada. - Recibir la parte dañada - Sustituir la parte dañada. - Verificación y ajuste. - Enviar la parte dañada a fábrica para su reparación

Operación y Mantenimiento de los Sistemas de Radar Primario
168
3.7.2 EJEMPLOS DE DIAGRAMAS DE LOCALIZACION DE FALLA EN UN RADAR PRIMARIO.

Operación y Mantenimiento de los Sistemas de Radar Primario
169
LOCALIZACIÓN DE FALLAS EN EL TRANSMISOR
SOBRECORRIENTE DE LA FUENTE DE ALTO VOLTAJE.
Indicación de la Fuente de Alto Voltaje (HVPS)
FALLA / OPERATIVO
Aísle la carga de la fuente de alto voltaje. Restablezca y aplique la radiación
Verifique Circuito de Protección
Cambie el componente dañado
Verifique los componentes asociados y remplace los componentes dañados
Reconecte la carga y retire el modulador y la protección. Restablezca y aplique la radiación
Conecte el elemento de protección y pruebe
Aísle el Transformador de pulsos de salida
Remplace el elemento de protección
Verifique la señal de sincronía del modulador
Verifique la señal del premodulador
Remplace el modulador
Remplace el premodulador
Verifique los componentes asociados al premodulador y remplace el dispositivo en falla
Cambie la red formadora de pulsos
Remplace el transformador de pulsos.

Operación y Mantenimiento de los Sistemas de Radar Primario
170
LOCALIZACIÓN DE FALLAS EN EL TRANSMISOR SOBRECORRIENTE DEL CIRCUITO DE POTENCIA
Indicación de Sobre corriente del Diodo de
protección
FALLA / OPERATIVO
Remplace el Diodo de protección, restablezca y active la radiación
Verifique el Circuito asociado al Diodo de Protección
Cambie el componente dañado
Remplace el transformador de pulsos, restablezca y active la radiación
Remplace el Magnetrón, restablezca y active la radiación
Remplace la red formadora de pulsos
Fin de pruebas

Operación y Mantenimiento de los Sistemas de Radar Primario
171
LOCALIZACIÓN DE FALLAS EN EL TRANSMISOR SOBRECORRIENTE DEL MAGNETRON.
Indicación de Sobre corriente del Magnetrón
FALLA / OPERATIVO
Verifique el circuito de protección de Sobre corriente de Magnetrón
Verifique la señal de Sincronía y su frecuencia (PRF)
Verifique la Generación de Sincronía
Restablezca y active la radiación y verifique si están presentes arcos en los cables de alta tensión
Remplace el Magnetrón, restablezca y active la radiación
Remplace los cables de Alta Tensión
Remplace el componente dañado
La alarma de Sobre corriente está presente desde el momento que activa la radiación
Remplace el Diodo de Protección
Remplace el Transformador de Pulsos y Pruebe
Remplace el Magnetrón
Si No
Remplace el Magnetrón
Fin

Operación y Mantenimiento de los Sistemas de Radar Primario
172
LOCALIZACIÓN DE FALLAS EN EL TRANSMISOR
BAJA POTENCIA TRANSMITIDA.
FALLA / OPERATIVO
Verifique la forma de onda de carga del modulador
Verifique el Voltaje de salida de la Fuente de alto Voltaje
Cambie el componente dañado
Verifique el regulador de carga y circuitos asociados.
Reemplace el Magnetrón
Baja Potencia Transmitida.
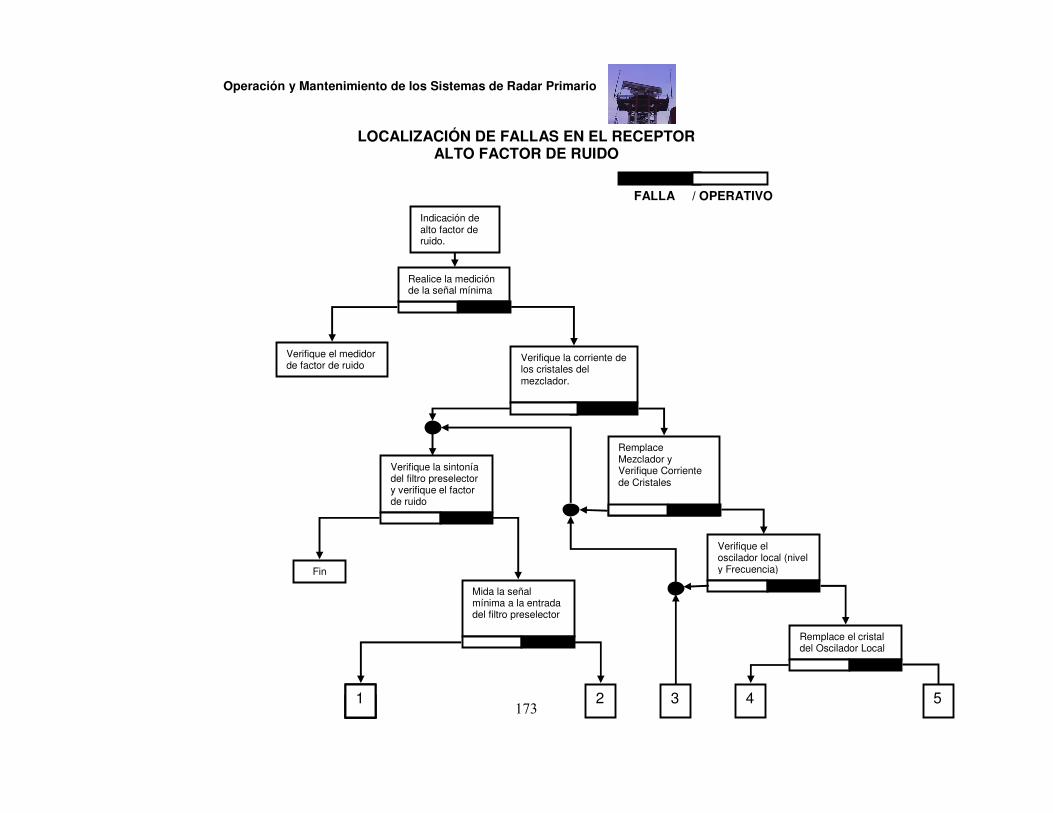
Operación y Mantenimiento de los Sistemas de Radar Primario
173
LOCALIZACIÓN DE FALLAS EN EL RECEPTOR ALTO FACTOR DE RUIDO
FALLA / OPERATIVO
Verifique la corriente de los cristales del mezclador.
Realice la medición de la señal mínima
Verifique el medidor de factor de ruido
Indicación de alto factor de ruido.
Verifique la sintonía del filtro preselector y verifique el factor de ruido
Remplace Mezclador y Verifique Corriente de Cristales
Mida la señal mínima a la entrada del filtro preselector
Verifique el oscilador local (nivel y Frecuencia)
Remplace el cristal del Oscilador Local
1 1 1 2 3 4 5 1 1
Fin

Operación y Mantenimiento de los Sistemas de Radar Primario
174
Remplace el tubo T/R del Duplexor.
Reemplace el Filtro Preselector
Remplace el oscilador local y Verifique Factor de Ruido.
Remplace el Amplificador de Bajo Ruido
Remplace el oscilador local y Verifique Factor de Ruido.
Remplace el Preamplificador de FI y verifique el factor de ruido
Remplace el Amplificador de FI y verifique el factor de ruido
Verifique el amplificador de bajo
ruido
Puenteé el combinador de haces y verifique el factor de ruido
Puenteé el limitador coaxial y verifique el factor de ruido
Remplace el Limitador Coaxial
Remplace el combinador de haces.
1 1 2 3 4 5
Fin de prueba
Fin de prueba
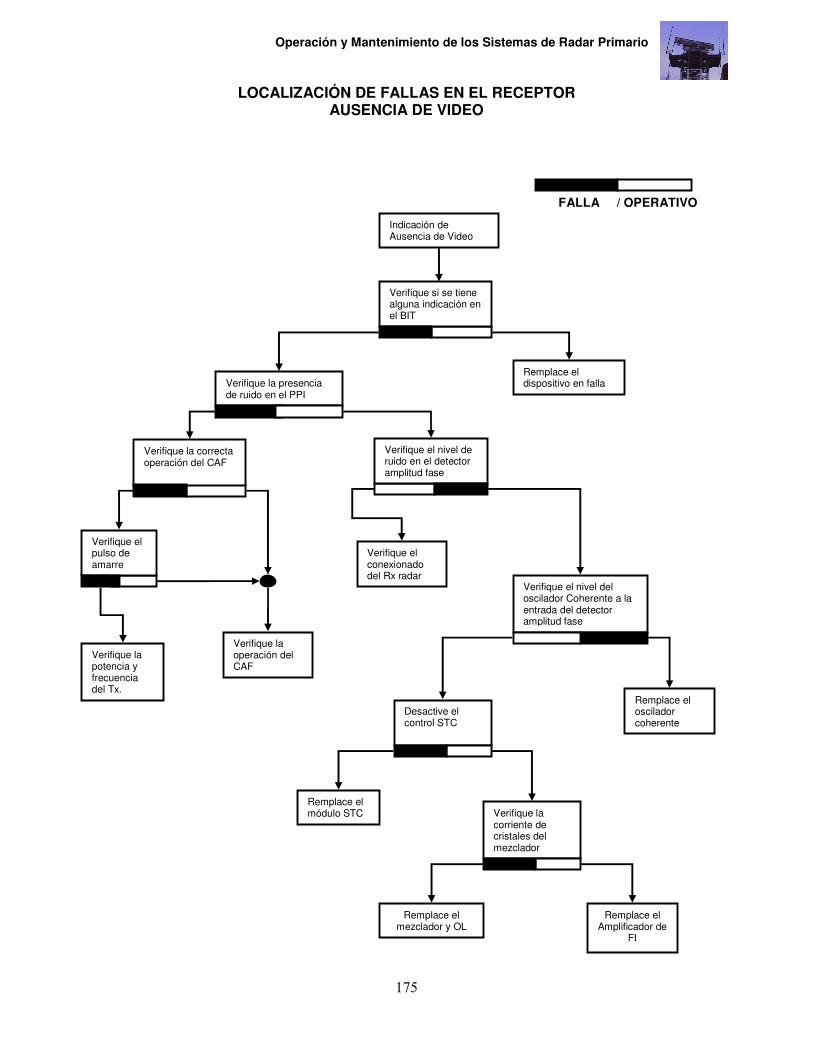
Operación y Mantenimiento de los Sistemas de Radar Primario
175
LOCALIZACIÓN DE FALLAS EN EL RECEPTOR AUSENCIA DE VIDEO
Indicación de Ausencia de Video
FALLA / OPERATIVO
Verifique la presencia de ruido en el PPI
Verifique si se tiene alguna indicación en el BIT
Remplace el dispositivo en falla
Verifique el nivel del oscilador Coherente a la entrada del detector amplitud fase
Desactive el control STC
Verifique el nivel de ruido en el detector amplitud fase
Verifique la correcta operación del CAF
Verifique el pulso de amarre
Verifique el conexionado del Rx radar
Verifique la operación del CAF
Remplace el oscilador coherente
Verifique la potencia y frecuencia del Tx.
Verifique la corriente de cristales del mezclador
Remplace el módulo STC
Remplace el mezclador y OL
Remplace el Amplificador de
FI

Operación y Mantenimiento de los Sistemas de Radar Primario
176
LOCALIZACIÓN DE FALLAS EN EL CIRCUITO DE CONTROL AUTOMATICO DE
FRECUENCIA (CAF)
FALLA / OPERATIVO
Verifique la correcta operación de la interfase mecánica al Magnetrón
Verifique la corriente de cristales del Mezclador CAF
Cambie el Mezclador CAF
Remplace la parte dañada de la interfase mecánica
Reemplace el Amplificador Diferencial.
Falla en el Sistema CAF.
Verifique la salida del amplificador de error del CAF
Cambie el amplificador de error del CAF.
Verifique la operación del amplificador diferencial del CAF
Fin

Operación y Mantenimiento de los Sistemas de Radar Primario
177
3.7.3 Niveles de Mantenimiento Correctivo Nivel 1. Este nivel de mantenimiento normalmente se debe realizar en el sitio operativo, y requiere de un conocimiento general del sistema, realizando las siguientes actividades:
- Verificaciones eléctricas y mecánicas. - Inspección visual. - Limpieza. - Revisión de conexiones. - Lubricación. - Cambio de fusibles y lámparas indicadoras. - Reporte de las observaciones de los equipos y fallas del sistema.
Nivel 2. Este nivel de mantenimiento se debe realizar en el sitio operativo, y se requiere un conocimiento a bloques del sistema, realizando las siguientes actividades:
- Efectuar los programas de mantenimiento. - Pruebas y ajustes del equipo. - Realizar los procedimientos de mantenimiento. - Manejo de los diagramas de localización de fallas. - Interpretación de los indicadores de falla. - Reemplazo del módulo(s) o tarjeta(s) dañada(s).
Nivel 3. Este nivel de mantenimiento normalmente se realiza en fábrica y en algunos casos en el sitio operativo, requiere de un conocimiento de electrónica a nivel componente, manejo del instrumental de medición adecuado y contar con las refacciones necesarias. Se realizan las siguientes actividades:
- Reparación a nivel componente de módulos y tarjetas electrónicos. - Reparación a nivel componente de módulos eléctricos, mecánicos e hidráulicos. - Ajuste y reparación del equipo de medición utilizado en el sitio operativo. - Modificaciones al sistema. - Ajustes especiales.
3.8 Estructura para la Operación En forma general se sugiere una estructura centralizada para la organización responsable de la operación y aplicación del mantenimiento a los sistemas de radar primario. En organizaciones que requieren una disponibilidad operativa las 24 Hrs; los 365 días del año de los servicios de radar primario como son las de Control de Trafico Aéreo, Compañías de Aviación, Comisión Nacional del Agua etc. Para estas se propone una organización centralizada, con una estructura para la operación y aplicación de los mantenimientos con los siguientes puestos:
- Jefe de Especialidad Radar. - Jefe de Turno. - Supervisor de Especialidad Radar. - Técnico Especialista Radar.
Operación y Mantenimiento de los Sistemas de Radar Primario
178
Cada puesto tiene las siguientes responsabilidades en relación al mantenimiento y operación del sistema de radar. 1.- El Jefe de Especialidad de Radar es el responsable de la planeación, organización, dirección, asignación y control de las actividades de mantenimiento preventivo de acuerdo al calendario correspondiente a su área, así mismo, es el responsable global de la operación continua y eficiente de los sistemas y equipos de su jurisdicción, auxiliándose para su realización, en el Supervisor de Especialidad o en el Técnico de mayor nivel en turno. La Jefatura de Especialidad de Radar también supervisara y realizara el seguimiento de la aplicación de los mantenimientos preventivos y correctivos de acuerdo a lo programado, haciendo las aclaraciones pertinentes al técnico responsable.
2.- Es responsabilidad de La Jefatura de Turno coordinar con el Jefe de Especialidad o los Supervisores de Especialidad o con el Técnico de mayor nivel de la Especialidad de Radar, que la aplicación de los programas de mantenimiento preventivo y correctivo no afecte la operación de los servicios de Radar. Así mismo la de coordinar la atención de cualquier reporte del personal operativo de mal funcionamiento del equipo de radar primario. 3.- Es responsabilidad del Supervisor de especialidad radar mantener la continuidad de los servicios de radar, coordinar la aplicación de los mantenimientos preventivos y correctivos. Así como la elaboración del registro de todas las actividades anteriores y colaborar con el jefe de especialidad todos los aspectos técnicos administrativos relacionados a la especialidad de radar. 3.- Es responsabilidad del Personal Técnico de la Jefatura de Radar debidamente capacitado con las autorizaciones correspondientes, de realizar actividades de mantenimiento preventivo y correctivo a los sistemas y equipos de Radar Primario. 4.- Es responsabilidad de los Jefes de Especialidad, Jefes de Turno; Supervisores de Especialidad y Técnicos Especialistas, en los casos en que se requiera asegurar o mantener la continuidad de los servicios, auxiliar al personal técnico cuando éste lo requiera o la situación lo amerite. En el caso de Empresas con un gran número de Estaciones de Radar se recomienda también una organización centralizada, con un Coordinador Técnico como responsable de la logística para la aplicación de los mantenimientos correctivos, reporte de fallas, así como el manejo de la reserva de refacciones. La estructura centralizada facilita el enlace entre el personal operativo y el personal técnico, previendo confusiones en reportes de fallas así como reportes no atendidos por el personal técnico. Las responsabilidades del coordinador técnico serán: - Analizar los reportes de operación del equipo de radar.
- Analizar lista de verificaciones y reporte de estado del equipo. - Suministrar el equipo necesario para la aplicación del mantenimiento preventivo
y correctivo.

Operación y Mantenimiento de los Sistemas de Radar Primario
179
- Asesorar técnicamente al personal técnico de mantenimiento. - Coordinar la asistencia técnica externa. Incluyendo reparaciones en fábrica. - Supervisión de los reportes de falla del sistema. - Monitoreo de las características del equipo. - Supervisión de la configuración del equipo. - Supervisión de la reserva de refacciones y su reabastecimiento. - Supervisión de los formatos de control, calibración y evaluación del equipo de
medición y herramientas utilizadas por el personal técnico. - Supervisión de la documentación de la aplicación del mantenimiento.
3.9 Lineamientos de Operación El personal encargado de operar el equipo de radar deberá registrar las observaciones pertinentes en una bitácora de operación, anotando los siguientes puntos:
- Revisión del estado de las alarmas del equipo. - Revisión del sonido y olor emitido por el equipo. - Calidad de detección de los blancos. - Calidad de la presentación de los blancos. - Calidad del sistema de enfriamiento. - Calidad del suministro de energía eléctrica
Una vez registrados los puntos generales de operación del equipo de radar en la bitácora de operación, esta deberá ser revisada por el personal técnico a la brevedad posible con el fin de atender cualquier reporte de mal funcionamiento del equipo. Centralizando estos reportes con el coordinador técnico. A continuación se proporciona un modelo para la Operación de los Sistemas de Radar Primario en una organización de alta disponibilidad del servicio.
1. El personal técnico asignado a la jefatura de Especialidad de Radar, esta comprometido a cumplir con los programas de mantenimiento para garantizar la operación de los sistemas y equipos de Radar Primario.
2. Ningún sistema o equipo de la Especialidad de Radar, deberá operar sin
habérsele asignado uno o más técnicos la responsabilidad de su mantenimiento.
3. Con el objeto de asegurar la calidad y mantener la continuidad en la operación de los sistemas y equipos, la Jefatura de Especialidad de Radar integrará su equipo de trabajo distribuyendo equilibradamente al personal en los diferentes turnos establecidos.
4. La responsabilidad del mantenimiento a los sistemas y equipos se asignará al
personal técnico bajo las siguientes consideraciones: -Para sistemas complejos o extensos para los que no sea conveniente que una
sola persona los mantenga, estos deberán dividirse en subsistemas, asignándole la responsabilidad de cada división a un solo técnico. -Las asignaciones de responsabilidad técnica de los equipos de Radar Primario, deberán ser individual y no compartida.

Operación y Mantenimiento de los Sistemas de Radar Primario
180
5. Las responsabilidades de mantenimiento preventivo, se podrán rotar entre los
técnicos con el objeto de dar al personal la oportunidad de poner en práctica sus conocimientos, capacidades y habilidades en los diferentes sistemas de que es responsable, debiendo intervenir para asegurar y mantener la continuidad de los servicios, equipos y facilidades para los que está capacitado.
6. El personal técnico deberá recibir la capacitación correspondiente sobre el equipo
de radar primario e instrumental, incluyendo los sistemas de alimentación primaria y de emergencia así como de aire acondicionado. Debiendo intervenir en estos sistemas para asegurar y mantener la continuidad de los sistemas y equipos de su responsabilidad.
7. El personal técnico deberá mantenerse actualizado, recibiendo cursos de
refresco. 8. Cuando exista posibilidad de comunicación entre el personal técnico que se
encuentre en alguna Estación foránea y el Coordinador Técnico, deberá el técnico reportarse cuando llegue a la Estación y cuando se retire de ella, informando invariablemente del estado general de operación de la Estación.
9. Debido a la importancia de los servicios prestados, el personal técnico no se
retirará de sus labores, concluido su turno, hasta confirmar la asistencia del personal que cubrirá sus funciones en el turno inmediato siguiente o, en su caso, se retirará únicamente con autorización del Jefe de Turno.

Operación y Mantenimiento de los Sistemas de Radar Primario
181
CAPITULO 4 LOGISTICA
Cuando se requiere instalar un sistema de radar, se deberá implementar una serie de procedimientos con el objetivo de poder satisfacer en forma optima los requerimientos operativos en su utilización. Como ejemplo de aplicación, se explicara la logística propuesta en el campo del control de tráfico aéreo. Esta metodología puede ser utilizada en cualquier otro campo de aplicación. La aplicación de los sistemas de detección radar en el campo del control de transito aéreo civil (aeropuertos y centros de control de área) implica que se tenga que realizar un análisis de los motivos que se tienen para poder requerir la instalación de un sistema de radar. Las dos principales razones para se tomen en cuenta para esta aplicación son:
a) La orografía particular del sitio en donde opera un aeropuerto b) El incremento en el volumen de operaciones que tiene dicho aeropuerto.
OROGRAFIA.- Los procedimientos de aproximación a un aeropuerto el cual se encuentra rodeado en su mayor parte por cadenas montañosas hace que la llegada y salida sea con altitudes bastante considerables, lo que repercute en un mayor consumo de combustible para las aeronaves al tener que estar haciendo circuitos de descenso y ascenso prácticamente sobre el aeropuerto con apoyo de los sistemas de navegación como son el radiofaro omnidireccional de alta frecuencia VOR (Very high frecuency Omnidirection Range) y el equipo medidor de distancia DME (distance mesurement equipment). VOLUMEN DE OPERACIONES.- En las principales capitales y ciudades del mundo, la necesidad de contar con medios mas eficientes de comunicación produce un mayor desarrollo y en este sentido el transporte aéreo se convierte en un motor vital de dicho desarrollo. El incremento en el número de operaciones aéreas que se realizan en las diferentes ciudades de desarrollo económico, obliga a que la llegada y salida de aeronaves se realice de una manera ordenada y segura. Por tal motivo el uso de una herramienta que nos permita la visualización de todo el escenario como si fuera un observador en las alturas ofrece las seguridades que se requieren en la separación de las aeronaves entre si y con respecto a los diferentes obstáculos en torno al aeropuerto. Ante tales factores tan determinantes para la seguridad en el espacio, se requiere que cuanto se presente la conjunción de los dos factores anteriormente descritos se tenga que armar un proyecto al término del cual se cuente con todas las seguridades que nos permitan el traslado de personas y bienes en las máximas condiciones de seguridad.

Operación y Mantenimiento de los Sistemas de Radar Primario
182
4. 0 Memoria de Estación Todos los procesos que se incluyan en el desarrollo de un proyecto de instalación nuevo, implica la generación de documentación técnica y operativa la cual constituye prácticamente el certificado de nacimiento y la historia clínica del sistema y que es de trascendental importancia conservar para poder en un momento necesario poder consultarla con el propósito de verificar y garantizar que el sistema opera en sus condiciones originales de diseño. Toda esta documentación constituye la memoria de la estación radar .La documentación requerida que debe ser parte de esta Memoria de Sistema se va generando conforme se avanza en el desarrollo del proyecto y a continuación se presenta la lista de los mismos:
1. Características técnicas mínimas del sistema (Anexo Técnico) 2. Estudio de sitio propuesto para instalación. 3. Pruebas de aceptación del sistema en fabrica (FAT) 4. Pruebas de aceptación del sistema en sitio (SAT) 5. Detalles de la instalación eléctrica normal y de emergencia 6. Pruebas de certificación operativa aeronáutica. 7. Protocolo de entrega oficial del sistema a los operadores. 8. Detalle de los equipos de prueba necesarios para cumplir con las labores de
mantenimientos preventivo y correctivo en el sistema. 9. Notificaciones y circulares técnicas.
En el caso de ser una instalación de radar antigua y no contar con la información de la memoria de estación. Se deberá recopilar la información existente y complementarla con los registros necesarios. La memoria de Estación deberá permanecer en la estación de radar. 4.1 Características técnicas mínimas del sistema (Anexo Técnico) Este documento es el inicio de lo que se deberá incluir en la memoria del sistema, ya que contiene las necesidades técnicas que deberán ser satisfechas por el o los fabricantes, cuando presenten sus propuestas. Para prepararlo es de fundamental importancia contar con asesores, probablemente externos al planear la primera instalación de un sistema de radar y posteriormente especialistas en la materia en los subsecuentes casos, que puedan estar totalmente actualizados en las nuevas tecnologías de sistemas de radar, a manera de poder preparar una lista de características que garanticen que se cuente con un equipo de ultima tecnología que pueda ofrecernos los mejores resultados en su aplicación. A continuación se describen las especificaciones técnicas para un radar primario terminal.
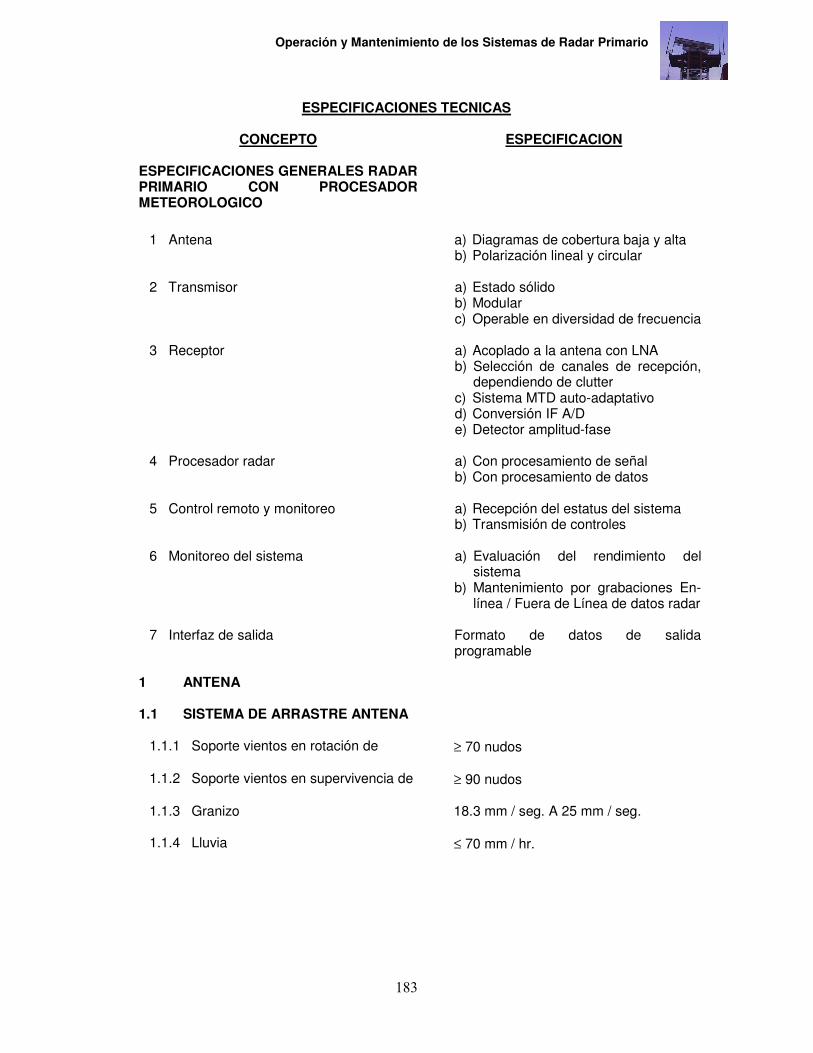
Operación y Mantenimiento de los Sistemas de Radar Primario
183
ESPECIFICACIONES TECNICAS
CONCEPTO ESPECIFICACION
ESPECIFICACIONES GENERALES RADAR PRIMARIO CON PROCESADOR METEOROLOGICO
1 Antena a) Diagramas de cobertura baja y alta b) Polarización lineal y circular
2 Transmisor a) Estado sólido
b) Modular c) Operable en diversidad de frecuencia
3 Receptor a) Acoplado a la antena con LNA
b) Selección de canales de recepción, dependiendo de clutter
c) Sistema MTD auto-adaptativo d) Conversión IF A/D e) Detector amplitud-fase
4 Procesador radar a) Con procesamiento de señal
b) Con procesamiento de datos 5 Control remoto y monitoreo a) Recepción del estatus del sistema
b) Transmisión de controles 6 Monitoreo del sistema a) Evaluación del rendimiento del
sistema b) Mantenimiento por grabaciones En-
línea / Fuera de Línea de datos radar 7 Interfaz de salida
Formato de datos de salida programable
1 ANTENA 1.1 SISTEMA DE ARRASTRE ANTENA
1.1.1 Soporte vientos en rotación de ≥ 70 nudos 1.1.2 Soporte vientos en supervivencia de ≥ 90 nudos 1.1.3 Granizo 18.3 mm / seg. A 25 mm / seg. 1.1.4 Lluvia ≤ 70 mm / hr.

Operación y Mantenimiento de los Sistemas de Radar Primario
184
ESPECIFICACIONES TECNICAS
CONCEPTO ESPECIFICACION 1.1.5 Temperatura de funcionamiento 0°C a 55°C
1.1.6 Motores de arrastre de antena Duplicados 1.1.7 Reductores Duplicados 1.1.8 Capacidad de arrastre a) Pedestal
b) Antena primaria instalada c) Antena secundaria
1.2 DATOS DE ROTACION DE ANTENA 1.2.1 Codificador de antena a) Óptico
b) Duplicado c) Conmutación automática
1.2.2 Codificación de información azimutal 14 bits 1.2.3 Quantum azimutal ≤ 0.022°C 1.2.4 Marcador norte 1 por vuelta de antena
1.3 JUNTA ROTATIVA
1.3.1 Duplicada.
1.3.2 Banda de frecuencias radar primario 2700 - 2900 MHz 1.3.3 Banda de frecuencias MSSR 1030 MHz ± 4 MHz
1090 MHz ± 4 MHz 1.3.4 Número de canales a) 2 para RF primarios CHA / CHB
b) 2 para RF primarios meteorológicos
c) 3 para MSSR banda L 1.3.5 Aislamiento entre canales ≥ 50 dB 1.3.6 Pérdidas < 0.3 dB para primario y meteorológico 1.3.7 Relación de onda estacionaria ≤ 1.3 : 1

Operación y Mantenimiento de los Sistemas de Radar Primario
185
ESPECIFICACIONES TECNICAS
CONCEPTO ESPECIFICACION
2. TRANSMISOR PRIMARIO
2.1 Sistema a) Tropicalizado, redundante, equipado con BITE
b) Control y conmutación automática entre ambos
2.2 Transmisor Estado sólido, modular
2.3 Frecuencia de operación 2700 a 2900 MHz 2.4 Excitadores Duplicados 2.5 Módulos de potencia Independientes 2.6 Para garantizar una cobertura de 60
M.N. a 35,000 pies para un blanco de 2 mts2 de superficie con probabilidad de detección de 80%: a) Potencia pico b) Ancho pulso c) Dinámica pulso corto / pulso largo
≤ 22 KW Pulsos: corto ≤ 1 µs/ largo ≤ 75 µs ≤ 60 / 80 dB
2.7 Enfriado de módulos de potencia Por aire 2.8 Alimentación de cada modulo de
potencia Independiente
2.9 BITE Integrado 2.10 Resolución en acimut ≤ 2.8 grados 2.11 Resolución en distancia ≤ 230 metros 2.12 Precisión en azimut ≤ 0.12 grados 2.13 Precisión en distancia ≤ 60 metros 2.14 Factor de mejoramiento clutter ≤ 55 dB

Operación y Mantenimiento de los Sistemas de Radar Primario
186
ESPECIFICACIONES TECNICAS
CONCEPTO ESPECIFICACION 3. RECEPTOR PRIMARIO
3.1 Sistema a) Tropicalizado, redundante equipado con bite
b) Control y conmutación automática entre ambos
3.2 Frecuencia 2700 a 2900 MHz 3.3 Factor global de ruido ≤ 3 dB 3.4 Sensibilidad ≥ - 107 dBm 3.5 Oscilador Sintetizador / STALO 3.6 Detección de blancos en velocidades
radiales 0 - 1000 nudos
3.7 Probabilidad de falsas alarmas 10-6 . 3.8 Dinámica ≥ 80 dB 3.9 STC Programable por sectores 3.10 Conversión IF analógica / digital 13 bits ≤ A/D ≤ 16 bits 3.11 Componente de corriente continua 10-6 volts 3.12 Frecuencia de muestreo conversión
A/D 7 MHz ≤ f ≤ 21 MHz
3.13 Detector amplitud y fase digital 13 bits ≤ codificación ≤ 16 bits 3.14 Receptor meteorológico Un solo canal

Operación y Mantenimiento de los Sistemas de Radar Primario
187
ESPECIFICACIONES TECNICAS
CONCEPTO ESPECIFICACION
4. PROCESADOR RADAR
4.1 Sistema a) Tropicalizado, redundante, equipado con BITE
b) Control y conmutación automática entre ambos
4.2 Procesadores asociados a) Procesador radar secundario
monopulso b) Procesador meteorológico
4.3 Tipo Filtrado doppler adaptable 4.4 Banco de filtros doppler 10 ≤ No. ≤ 20 4.5 Selección de bancos de filtros Por mapas clutter adaptativos 4.6 Dispositivos adaptivos de clutter para
filtrar a) Clutter de tierra b) Clutter de lluvia c) Clutter de ángeles
4.7 Procesamiento de señales primarias a) Eliminación de interferencias
b) Detección saturaciones c) Umbrales de falsas alarmas adaptivos d) Actualización de mapas clutter auto
adaptivos 4.8 Procesamiento respuesta-respuesta
(reply to reply) a) Asociación de plots primarios y
secundarios b) Correlaciones track-plot c) Eliminación de fantasmas d) Algoritmos de antireflexiones
4.9 Procesamiento de señales
meteorológicas a) Eliminación respuestas asíncronas b) Filtrado doppler de clutter de tierra c) Resolución < 1 MN d) Áreas densas > 16 quantums por milla
náutica e) Seis niveles de reflectividad f) Representación vectorial g) Control de carga de vectores
meteorológicos

Operación y Mantenimiento de los Sistemas de Radar Primario
188
ESPECIFICACIONES TECNICAS
CONCEPTO ESPECIFICACION
4.10 Contenido mínimo de mensaje traqueo a) Posición de pista
b) Distancia (14 bits, con LSB = 240 ήseg.) & Azimut (14 bits, con LSB 0.022°
c) Contenido de códigos d) Modos de interrogación e) Indicadores de emergencia f) Indicadores de identificación especial g) Pista de prueba
4.11 Capacidad de procesamiento ≥ 700 plots primarios, secundarios o
asociados ≥ 300 plots primarios falsos ≥ 100 plots secundarios falsos
4.12 Probabilidad de falsas alarmas a la
salida de pistas 1 por rastreo
4.13 Resolución radar primario a) Azimut ≤ 2.8 grados
b) Distancia ≤ 230 metros 4.14 Precisión radar primario a) Azimut ≤ 0.1 grados
b) Distancia ≤ 60 metros 4.15 Interfaz eléctrica de salida a) 6 puertos EIA RS 232 C
b) Ajustable de 1200 a 19200 bits / seg. 4.16 Características de transmisión Mensajes síncronos 4.17 Formatos programables a) Asterix
b) Aircat-500 c) HDLC-AIRCAT d) CD1, CD2
Como se puede ver, en dicha tabla se encuentran comprendidas todas las características de manera general que deben ser consideradas en el abastecimiento del sistema por los proveedores a fin de cumplir con las necesidades del comprador. Claramente que este documento no solo esta compuesto de una página, cada uno de los conceptos incluidos en esta descripción general deberá ser ampliado para cada uno de los puntos descritos en la misma.

Operación y Mantenimiento de los Sistemas de Radar Primario
189
4.2 Estudio de Sitio propuesto para Instalación Se deberá realizar un estudio del sitio donde va a estar localizado el sistema de radar con el objetivo de localizar los principales obstáculos orográficos y físicos y así seleccionar la posición y altura de la antena que nos proporcione una buena cobertura teórica. Una vez que ha sido seleccionado el sistema, se tiene que realizar una reunión entre los responsables del desarrollo del proyecto por parte del fabricante y los que serán responsables de su mantenimiento, con el propósito de que los especialistas del fabricante se puedan abocar al análisis del sitio cuyas características de ubicación puedan ofrecer las mejores condiciones para la operación del sistema. El sitio elegido para la instalación del sistema deberá ofrecer las mejores condiciones de abastecimiento eléctrico y disponibilidad de canales de comunicación a fin de que el costo de dicho proyecto no se incremente al tener la necesidad de abastecer con energía eléctrica al sitio desde largas distancias y por consiguiente el envío de datos hacia otros sitios no sufra la misma situación. El propósito de este documento es contar con la mayor cantidad de información respecto al sitio a fin de definir el mejor compromiso para la realización y la definición de la altura de la torre de antena así como de la obra civil para alojar los equipos que componen el sistema de radar de acuerdo a la cobertura solicitada y a las necesidades del cliente. Todos los obstáculos no naturales se tienen que reportar en este documento a fin de definir las posibilidades de alteración en el patrón de cobertura del radar especialmente en las áreas de RAYLEIGH y FRESNEL. Durante la elaboración del estudio se tendrá que hacer uso de las siguientes herramientas: 1. Equipo global de posición (GPS): Utilizado para fijar la ubicación de la torre y
obstáculos en el contorno del sitio.
2. Brújula o compás: Utilizada para una rápida ubicación angular de los obstáculos.
A continuación se tendrán que compilar los siguientes datos referentes por cada uno de los sitios propuestos para la instalación: INFORMACIONES:
A. Coordenadas geográficas de sitio. B. Tipo de radar a instalar. C. Ubicación del radar. D. Caseta de equipos de radar. E. Informaciones existentes del sitio. F. Informaciones meteorológicas. G. Interferencias eléctricas. H. Localización de obstáculos. I. Curvas de cobertura teórica.

Operación y Mantenimiento de los Sistemas de Radar Primario
190
A. Coordenadas Geográficas de Sitio.
Referencia GPS Valores
Latitud: Longitud: Num. de satélites: Formato de lectura:
Lectura del proveedor Valores Latitud: Longitud: Num. de satélites: Formato de lectura:
B. Tipo de Radar a Instalar
Equipo Valores Tipo: Antena: Velocidad de giro: Alcance máximo: Altura y tipo de torre: Energía: Se tiene equipo de sistema de fuerza ininterrumpible (SFI)
Frecuencia: Valores de voltaje: Línea de alta tensión cerca del sitio y en caso afirmativo cercanía y valor de tensión:
OBSERVACIONES:

Operación y Mantenimiento de los Sistemas de Radar Primario
191
C. Ubicación del Radar Este radar se instalara en:
Descripción de la ubicación del radar Valores
En aeropuerto: si o no Menos de 5 Km. Mas de 5 Km. Distancia a la torre de control Distancia a la pista Distancia a la primera construcción: Altura de la primera construcción: Angulo a la primera construcción: Tipo de sitio: costero, montañoso, ciudad. Camino al sitio: asfalto, brecha o terraceria:
Distancia a la ciudad/hotel, tiempo de recorrido de la ciudad/hotel
Observaciones especiales:
D. Caseta y Torre del Radar
Datos Valores Caseta existente si o no: Tamaño de la(s) puerta(s) de acceso Planos de la caseta si o no: Observaciones en la distribución de la caseta:
Tipo de energía: normal/SFI/planta de emergencia, frecuencia, transformador:
Aire acondicionado: Alarmas especificas Observaciones:
Altitud del sitio s.n.m.m. Propuesta de altura de torre (solo como propuesta, esta puede se modificada después del análisis de todos los parámetros del sitio)

Operación y Mantenimiento de los Sistemas de Radar Primario
192
E. Informaciones Existentes del Sitio
Informaciones Valores
¿Se tiene una estación radar anterior?: si o no Tipo: primario secundario Aun esta operativo: si o no
Estación con radomo altura de la torre radar actual:
¿Se tiene transponder de prueba en el sitio?: si o no
¿Visible desde el sitio radar?: si o no
Distancia y altura desde el sitio: Presencia de edificios: si o no Presencia y tipo de energía: si o no:
Coordenadas GPS del transponder: latitud: longitud:
Observaciones:
F. Informaciones Meteorológicas.
Parámetro Valores
Variación de temperatura: diurna: nocturna:
Temperatura anual. minima: máxima:
Nivel de humedad. minima: máxima:
Precipitación. minima: máxima: Meses específicos:
Vientos predominantes: Observaciones:

Operación y Mantenimiento de los Sistemas de Radar Primario
193
G. Interferencias Eléctricas
Equipos Valores Estación satelital: si o no Frecuencia de transmisión: Frecuencia de recepción:
Sistema VOR: si o no Frecuencia:
Sistema DME: si o no Frecuencia de emisión: Frecuencia de recepción:
Sistema ILS: si o no Frecuencia:
Radar primario: si o no Frecuencias: Potencia:
Radar meteorológico: si o no: Frecuencia: Potencia:
Radar secundario en sitio: si o no usado durante la instalación: si o no
Observaciones:

Operación y Mantenimiento de los Sistemas de Radar Primario
194
H. Localización de obstáculos
A continuación se describe la ubicación de los obstáculos no naturales localizados a una distancia menor de 1000 metros del sitio radar propuesto.
Num. Tipo Acimut Distancia Altura
I. Curvas de Cobertura Teórica
Tomando como base a todos los datos proporcionados en los incisos anteriores, el fabricante de los sistemas puede realizar una investigación que nos pueda proporcionar una estimación aproximada de cómo estará operando el sistema de radar primario de acuerdo a las condiciones practicas que se encontraran en los sitios seleccionados a fin de que junto con el cliente se pueda realizar una tomar una decisión que nos proporcione las mejores condiciones de operación del sistema. Como resultado de ese estudio se puede determinar de manera precisa cual será la mejor altura de torre para el montaje de las antenas, de que materiales se sugiere que se construya la torre debido a la influencia de los vientos predominantes en el sitio escogido y la orientación que pueda tener la obra civil a fin de poder efectuar una distribución optima de los equipos que componen el sistema al interior de la caseta. En las siguientes figuras se podrá apreciar una serie de diagramas de cobertura teóricos los cuales corresponden a un sitio en ambiente tropical.

Operación y Mantenimiento de los Sistemas de Radar Primario
195
. Figura 1 Diagrama de cobertura a una altitud de 500 pies. Figura 2 Diagrama de cobertura a una altitud de 1000 pies.

Operación y Mantenimiento de los Sistemas de Radar Primario
196
Figura 3 Diagrama de cobertura a una altitud de 2000 pies. Figura 4 Diagrama de cobertura a una altitud de 5000 pies.

Operación y Mantenimiento de los Sistemas de Radar Primario
197
Figura 5 Diagrama de cobertura a una altitud de 10,000 pies. Figura 6 Diagrama de cobertura a una altitud de 15000 pies.

Operación y Mantenimiento de los Sistemas de Radar Primario
198
Figura 7 Diagrama de cobertura a una altitud de 20000 pies Figura 8 Diagrama de cobertura a una altitud de 25000 pies.

Operación y Mantenimiento de los Sistemas de Radar Primario
199
Figura 9 Diagrama de cobertura a una altitud de 30000 pies.

Operación y Mantenimiento de los Sistemas de Radar Primario
200
4.3.- Resultados de las Pruebas de Aceptación en Fábrica (FAT) Se deberán realizar las Pruebas de Aceptación Técnica en Fábrica con el fin de comprobar las especificaciones técnicas proporcionadas por el fabricante.
Al haber realizado el estudio de sitio, se tiene una cantidad de datos que permiten definir ciertas características particulares del sistema que será instalado en el sitio analizado. Utilizando todos estos datos, el responsable del desarrollo por parte del fabricante, deberá de realizar las coordinaciones con las diferentes áreas que proporcionaran las partes que compondrán el sistema ofertado, debido a que en la mayoría de los productores de sistemas de radar primario la producción de las unidades se realiza de manera separada e incluso fuera de la misma planta o ciudad. Por las razones anteriores, una vez que se reporta al Jefe del Proyecto que las unidades que constituyen el sistema ya están listas para ser montadas, este debe realizar la programación de una serie de actividades para poder tener el sistema adquirido completamente integrado y que este listo para poder evaluar el funcionamiento de las diferentes unidades ya completamente listas para operar. Se deben realizar pruebas que arrojen resultados que garanticen la operación del sistema en una primara evaluación que se efectúa en el ambiente de la fabrica y que de alguna manera siempre están controladas en referencia al abastecimiento eléctrico y de temperatura. Por otra parte los resultados obtenidos deben demostrar que el funcionamiento del sistema cumple con las especificaciones que se establecieron en el anexo técnico que fue descrito en el párrafo 4.1 de esta capitulo. A continuación se enlistan algunas de las pruebas realizadas como parte del protocolo de aceptación en fábrica al cual en la mayoría de los casos es seguido por parte del control interno de calidad del proveedor así como por los representantes técnicos tanto del área de logística del fabricante como del cliente:
Prueba de equipo de auto prueba Pruebas en el receptor radar.
a. Prueba en el amplificador de RF. b. Prueba en el generador de RF. c. Pruebas de control de sensitividad (STC) para el canal blanco. d. Pruebas de control de sensitividad (STC) para el canal meteorológico. e. Prueba de ajustes de umbrales en distancia y acimut. f. Prueba de selección de patrón de antena para el canal meteorológico. g. Pruebas en el receptor primario.
Pruebas en el procesador de señales. 1) Señales de sincronización. 2) Frecuencia de repetición del pulso. 3) Señales de sincronía externa. 4) Función de auto prueba del procesador de señal. 5) Valor del muestreo A/D. 6) Procesamiento de señal. 7) Correlación e Interpolación.

Operación y Mantenimiento de los Sistemas de Radar Primario
201
Pruebas en el canal meteorológico del radar.
I. Pruebas del canal meteorológico. II. Pruebas del procesador meteorológico. III. Pruebas de mínima señal detectable.
Pruebas en el transmisor.
i. Prueba del control de la emisión. ii. Prueba de verificación del amplificador del pulso. iii. Prueba de potencia de salida. iv. Prueba de potencia sin un modulo de energía. v. Prueba del ancho y el espectro del pulso transmitido. vi. Armónicas y componentes espúmeas de la transmisión.
La totalidad de las pruebas mencionadas anteriormente se realizan de acuerdo a los procedimientos ya descritos en el desarrollo de los capítulos 3 y 5 de este trabajo y los resultados que se obtienen se detallan en los formatos 1,2 y 3. Puede presentarse la situación que durante el desarrollo de las pruebas en fábrica algunos módulos o componentes no respondan de acuerdo a las características que se esperan o bien que presenten daño. En el momento que se tengan estos casos, el personal del área logística del proveedor junto con el del cliente (si es que se encuentra presente en el desarrollo de las pruebas) solicitaran que dichas unidades con operación dudosa o errónea sean sustituidas de inmediato, por lo que se anotaran sus números de parte y de serie, tanto de la dañada como de la que se esta montando a fin de poder tener un control detallado de las unidades puestas a prueba. Cuando al término de las pruebas estas arrojen los resultados esperados, será necesario el levantamiento de un protocolo de recepción en fábrica en el cual queden perfectamente establecidas todas las unidades que componen el sistema que ha operado en las condiciones especiales. Este elenco de unidades se conocerá como composición de suministro el cual deberá contar con la información de los números de parte (P/N) y los números de serie (S/N) de las diferentes partes que conforman el sistema de radar. Esta información la deberá proporcionar el fabricante y constituye la versión final que será enviada al cliente para su instalación, ajustes y pruebas en sitio.

Operación y Mantenimiento de los Sistemas de Radar Primario
202
Air Traffic Management Systems
Division
TEST DATA RECORD
[1]TDR No.:
E099-01-0890TDR
[2]DEPARTMENT
[3] ATP OF REFERENCE
E099-01-0890ATP
[4]ISSUE
REV. A
[5] UUT DENOMINATION [6] PART NUMBER [7] SERIAL No.
[8]
Paragraph
of ATP
[9]
PARAMETER
[10]
REQUIRED
VALUE
[11]
MEASURED
VALURE
[12]
OPERATOR
SIGNATURE
[13]
NOTE
VISUAL I$SPECTIO$ OK
3.1.1.1 Bite test OK
3.2.1.1 $oise Figure ≤ 2.0 dB
3.2.2.1 STALO
F1 2135 MHz ± 64KHz
F2 2185 MHz ± 64KHz
3.2.2.2 COHO 30 MHz ± 750 Hz
3.2.2.3 640/670 Mhz Generator
J11 From 670 MHz ≤23.5 kHz
3.2.3.1 Programmability of Target Low/High
Beam Selection
Test 1 ok
Test 2 ok
3.2.3.2 Programmability of Target STC law
Test 1 ok
Test 2 ok
3.2.4.1 Programmability od Weather STC law
Test 1 ok
Test 2 ok
3.2.5.1 Test Point Trigger RAG
a) ok
b) Ok
c) ok
3.2.6.1 Programmability of Wheather
Low/High selection
Test1 Ok
Formato 1 Registro de parámetros

Operación y Mantenimiento de los Sistemas de Radar Primario
203
Test2 Ok
3.2.7.1 Receiver dynamic range
a) 1.0 ± 0.2
b) ≥61 dB
3.3.1.1. Timing Generation and General
Characteristics
Test1
1a) PRT1 1220 ± 2µs *9
PRT2 1220 ± 2µs *7
Sw. Trigg. 1220± 2µs;
1b) N. Trigg. 4800± 10%
ms.
Test2 0.0666 µs;
ok.
3.3.2.1 Internal timing signals
Test1
Sweep Config: 7/9
PRT2(µs) 1321±1
PRT1(µs) 1143±1
Test2 Swp conf: 7/9
Sweep $. PRT2 (µµµµs) PRT2 (µµµµs)
1
2
3
4
5
6
7
8
9
1313±2 1132±2
1316±2 1135±2
1318±2 1137±2
1321±2 1140±2
1324±2 1143±2
1326±2 1146±2
1329±2 1148±2
1151±2
1153±2
3.3.3.1 External Timing Signals SSR Trigg 1220±100µs
Disp Trigg 1220±100µs
3.3.4 Bite …..at the end of Sweep ok
3.3.5 A/D sampling rate 533ns
3.3.6.1 PC MainLobe/SideLobe Ratio ≥40 dB
3.3.6.2 Weigh Selection Map Ok
Ok
3.3.6.3 Combined Thresholding
Test 1 1) ok
2) ok
3.3.6.4 Strong Target Adaptive Control
1) OK
2) OK
3.3.7.1 Interpolating Target Reports Confidence lev: OK
Quality indexes: OK
3..4.1.1 Indipendent Weather Channel a) OK
b) OK
Formato 2 Registro de parámetros.
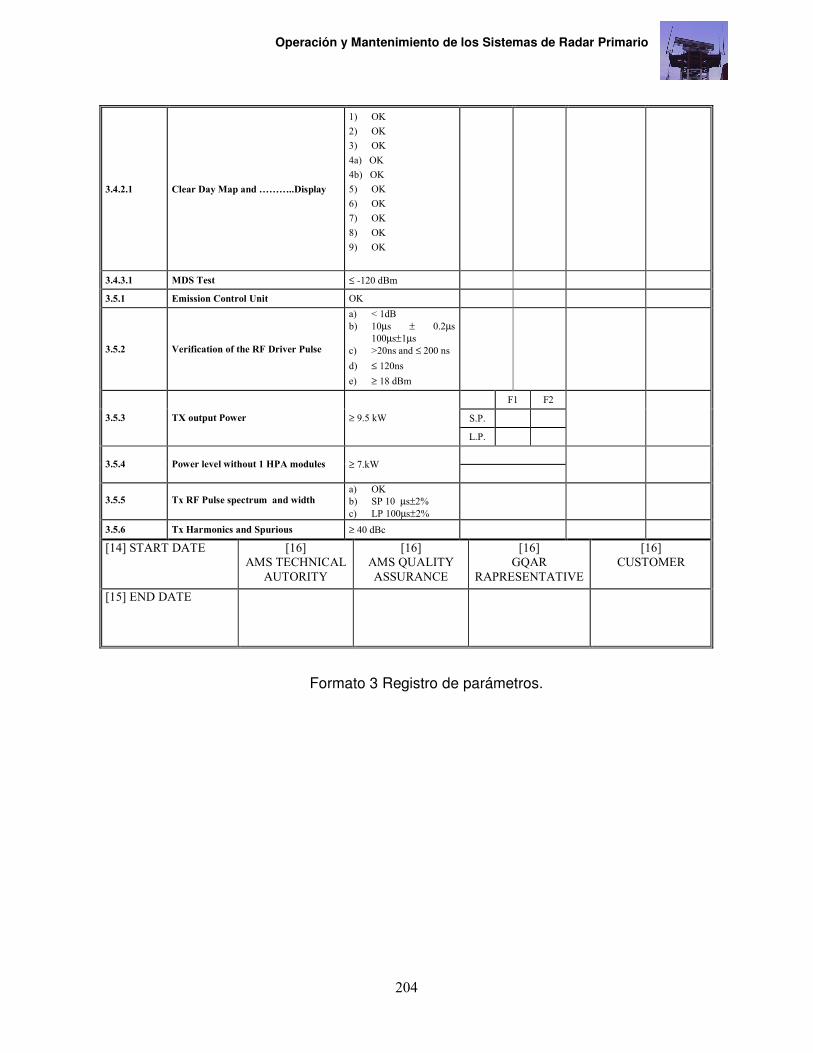
Operación y Mantenimiento de los Sistemas de Radar Primario
204
3.4.2.1 Clear Day Map and ………..Display
1) OK
2) OK
3) OK
4a) OK
4b) OK
5) OK
6) OK
7) OK
8) OK
9) OK
3.4.3.1 MDS Test ≤ -120 dBm
3.5.1 Emission Control Unit OK
3.5.2 Verification of the RF Driver Pulse
a) < 1dB
b) 10µs ± 0.2µs
100µs±1µs
c) >20ns and ≤ 200 ns
d) ≤ 120ns
e) ≥ 18 dBm
F1 F2
S.P. 3.5.3
TX output Power
≥ 9.5 kW
L.P.
3.5.4 Power level without 1 HPA modules ≥ 7.kW
3.5.5 Tx RF Pulse spectrum and width a) OK
b) SP 10 µs±2%
c) LP 100µs±2%
3.5.6 Tx Harmonics and Spurious ≥ 40 dBc
[14] START DATE
[16]
AMS TECHNICAL
AUTORITY
[16]
AMS QUALITY
ASSURANCE
[16]
GQAR
RAPRESENTATIVE
[16]
CUSTOMER
[15] END DATE
Formato 3 Registro de parámetros.

Operación y Mantenimiento de los Sistemas de Radar Primario
205
4.4 Pruebas de Aceptación Técnica en Sitio (SAT) Una vez que se ha concluido la etapa de las pruebas de aceptación técnica en fábrica el sistema, es enviado al sitio que ha designado el cliente durante el proceso del estudio de sitio. Durante el proceso de producción, ajustes y pruebas en fabrica, el cliente deberá haber acondicionado el recinto en donde se instalaran los equipos componentes del sistema radar, así como también haber construido la torre de soporte de antenas de radar siguiendo las recomendaciones que el fabricante del radar le haya hecho llegar y haber equipado. Por otra parte ya se deberá tener la caseta con la acometida eléctrica comercial, la planta de emergencia de abastecimiento eléctrico, el sistema de fuerza ininterrumpible y las unidades de acondicionamiento de aire de acuerdo a la capacidad que solicita el fabricante a fin de mantener la operación de los equipos y sistemas en las condiciones que requiere el proveedor a fin de garantizar el optimo funcionamiento del sistema. Una vez cumplidos estos requisitos, será necesario de disponer de un periodo de tiempo, entre tres y seis semanas a fin de poder realizar la instalación de los equipos, su primer arranque, una evaluación de las primeras detecciones que se hagan al empezar a operar el equipo y basándose en estos primeros valores, comenzar a realizar los ajustes específicos del sistema que nos permitan lograr su optimo funcionamiento de acuerdo a las condiciones de terreno, nubosidad, clima y temperatura en donde esta siendo instalado. Al concluir la fase de instalación, ajustes y primeras pruebas que el personal del proveedor haya realizado con el sistema, los representantes técnicos del cliente deberán realizar un protocolo de pruebas que les permita comprobar si el ajuste realizado al sistema cumple con los requisitos que fueron establecidos en el anexo técnico. Dicho protocolo de pruebas será acordado entre el jefe de proyecto del fabricante y el jefe de proyecto del cliente además de que podrán ser incluidas todas las pruebas libres que el cliente desee verificar a fin de quedar totalmente satisfecho con la calidad y eficiencia del sistema adquirido. En este protocolo de pruebas se realizan básicamente las mismas pruebas que se realizaron en el protocolo seguido para la aceptación en fabrica, con la gran diferencia de que en este caso ya se cuenta con el ajuste en el sistema que las características del sitio están demandando y que fueron pulidas durante el proceso de ajuste fino de los equipos. Bajo estas condiciones, las pruebas mas relevantes a realizar son las mismas que se realizaron durante el protocolo de aceptación en fábrica, con la diferencia primordial de que los datos que se registren en los formatos son los que se están obteniendo por los ajustes realizados en el sitio de instalación. Los formatos que deben ser compilados son los parámetros utilizados en las pruebas de aceptación en fabrica (formato 1, formato 2 y formato 3).
Operación y Mantenimiento de los Sistemas de Radar Primario
206
4.5 Detalles de la Instalación Eléctrica Normal y de Emergencia
Se deberá registrar los documentos y diagramas referentes a la instalación de los Sistemas de Alimentación, así como los Sistemas Auxiliares los cuales consisten en:
Diagramas del Sistema de Alimentación Primaria.
Diagrama del Sistema de Alimentación de Emergencia.
Diagrama de Sistema de Tierras.
Diagrama de Ductos.
Diagrama del Sistema de Aire Acondicionado. El sistema radar se compone para su funcionamiento de diferentes unidades, algunas de las cuales requieren de continuidad tanto en energía como en temperatura de operación durante el tiempo que están funcionando, en la mayoría de los casos las 24 horas del día durante los 365 días del año. Esta energía normalmente proviene del organismo responsable del abastecimiento eléctrico comercial, que en nuestro país es la Comisión Federal de Electricidad. Las características de abastecimiento eléctrico para los sistemas de radar en México son las siguientes: 220 VAC Trifásico, en cuatro hilos (Tres fases vivas y neutro). 60 Hz de frecuencia. Si bien en su gran mayoría el abastecimiento eléctrico presenta una confiabilidad mayor al 80%, existe la posibilidad de que en las estaciones de detección radar instaladas en comunidades remotas o en la cima de algún cerro presenten variaciones en el abastecimiento eléctrico, las cuales pongan en riesgo la continuidad en la operación del sistema descrito. A fin de poder compensar estas variaciones cuando se presenten (ya sea respecto a alta o baja tensión y/o variación en el ciclaje de la frecuencia eléctrica) en todas las instalaciones se hace necesario el establecimiento de una planta de emergencia la cual pueda ser puesta en operación de manera automática o manual en caso de la presencia de inestabilidades eléctricas, y de esta manera se garantice la operación confiable del sistema que se esta protegiendo. En condiciones normales de funcionamiento, el sistema se abastece de energía a través de una unidad de transferencia la cual selecciona la vía de la acometida comercial eléctrica y la planta de emergencia permanece apagada en estado de espera. En el momento de que los sensores eléctricos detectan la ausencia o variaciones en la acometida eléctrica, de inmediato activan el sistema de transferencia, generando señales que activan el funcionamiento de la planta de emergencia, la cual puede tomar un tiempo de entre 5 a 15 segundos para poder estabilizar su generación de energía.

Operación y Mantenimiento de los Sistemas de Radar Primario
207
Sin embargo, como se menciona al principio de este inciso, las diferentes unidades que componen al sistema, debido a su tecnología computarizada o de alta escala de integración electrónica, no pueden manejar esa ausencia de energía mientras la planta de emergencia alcanza su régimen de operación. Para poder subsanar este inconveniente es necesario que a la entrada a la unidad de distribución de energía del sistema, sea conectada una unidad de energía ininterrumpible (UEI), la cual al estar compuesta por un banco de baterías y un inversor, puede soportar la carga mientras la planta de emergencia alcanza a generar el voltaje necesario que requerirá la UEI para poder recuperar la energía descargada del banco de baterías. Prácticamente esta UEI es la que siempre alimenta al sistema de radar y a su entrada se conectan ya sea la acometida eléctrica comercial o bien la salida de la planta de emergencia. A continuación se presenta el diagrama unifilar de la estación radar Peñon para el control de transito aéreo en el aeropuerto de la ciudad de México:
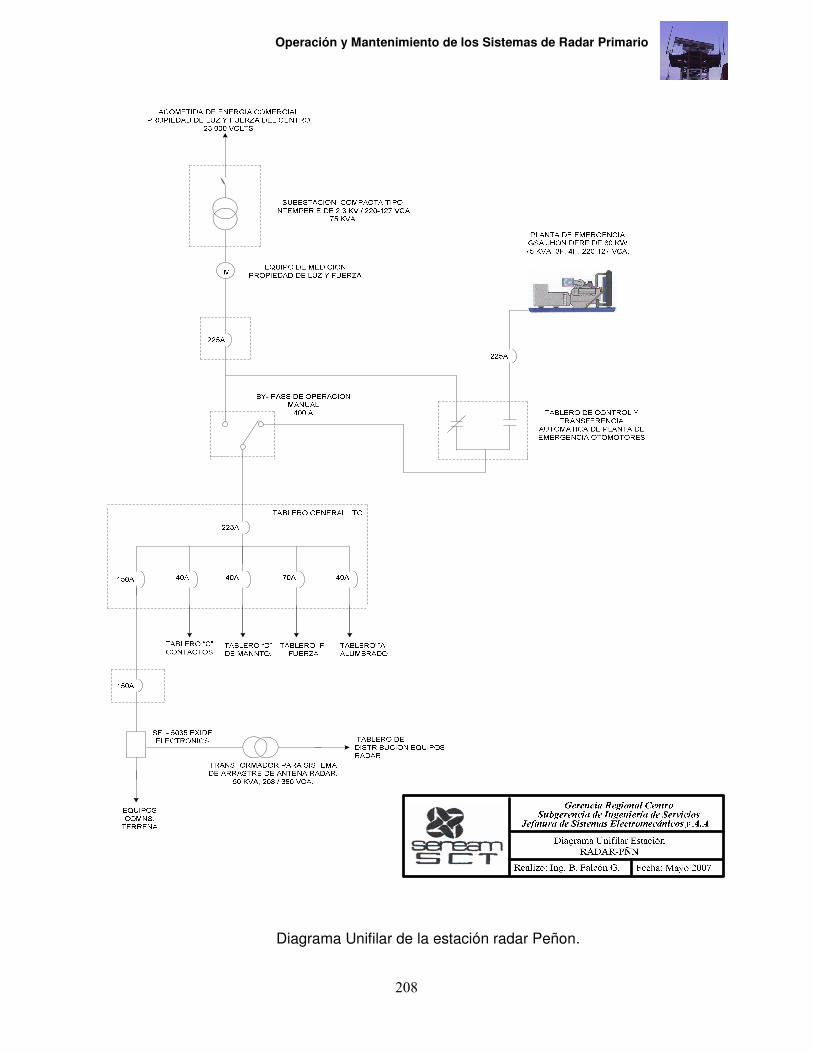
Operación y Mantenimiento de los Sistemas de Radar Primario
208
Diagrama Unifilar de la estación radar Peñon.

Operación y Mantenimiento de los Sistemas de Radar Primario
209
4.6 Pruebas de Certificación Operativa Aeronáutica Una vez que se han realizado todas las pruebas técnicas al sistema mismas que verifican que se esta operando de acuerdo a lo establecido tanto en el Anexo Técnico como en el Anexo 10 de la OACI (Organización de Aviación Civil Internacional) y comprobado que el sistema se encuentra totalmente operable, es el momento de realizar la verificación operativa aeronáutica, por lo cual se deberá realizar una prueba operativa del sistema de radar con el fin de registrar los alcances y limitaciones reales obtenidas en la navegación de prueba. Para lo cual el personal de control de transito aéreo o bien el personal que operara el sistema de acuerdo a las funciones para las cuales fue adquirido, compruebe los alcances de detección, zonas ciegas detectadas y definición de áreas de minima altitud de vectoreo a fin de estar en el conocimiento de cómo ha de ser operado el sistema. La realización de esta serie de pruebas es con el objeto de poder considerar al sistema de radar totalmente operable y se ejecuta el programa de pruebas con la asistencia de un grupo de trabajo compuesto por las siguientes elementos: Personal de la Autoridad Aeronáutica. Personal de Control de Transito Aéreo. Personal Técnico responsable del funcionamiento y mantenimiento. Personal de la Compañía Fabricante. A continuación se describen cada una de las pruebas a que se somete un nuevo sistema radar o bien uno reinstalado por el personal de control de tránsito aéreo:
ESPECIFICACION DE PRUEBAS 4.6.1 Prueba de Estabilidad funcional del Sistema El sistema radar deberá permanecer conectado y en funcionamiento durante un lapso no menor de 72 horas; después de este lapso, se procederá a iniciar los trabajos de certificación una vez que los técnicos especialistas en radar notifiquen que el equipo esté operando completamente. 4.6.2 Prueba del Angulo de Inclinación de la Antena El personal de tierra, evaluará el ángulo predeterminado de acuerdo a los parámetros de cobertura teórica señalados anteriormente. Se verificará el ángulo óptimo de inclinación, volando la aeronave VFR a 3000 pies MSL desde la antena radar y después de este punto en alejamiento por el acimut 110º hasta 50MN; y desde 60MN a FL200 hacia la antena radar. 4.6.3 Prueba de Orientación Se verificará la orientación magnética de la antena, mediante 3 puntos geográficos, fácilmente identificables desde el aire, correspondiendo a 1 por cada cuadrante; volando visual (VFR) a 1000 pies sobre el terreno, desde/hacia la antena radar a los puntos. Por ejemplo para el radar de Cancún los 3 puntos geográficos que se seleccionaron, en posición relacionada con la antena radar, son:

Operación y Mantenimiento de los Sistemas de Radar Primario
210
1.- CRUCE DE CAMINOS
H 023º 5.7 MN
2.- PUENTE EN PUNTA NIZUC
H 074º 4.38 MN
3.- PUERTO MORELOS
H 183º 10.64 MN
Cuando la aeronave pase sobre cada punto, el piloto lo indicará con la frase “MARCA”, y se registrarán los datos notificados, así como los datos de distancia observados en la pantalla radar. Estos datos deberán situarse dentro de los parámetros predeterminados con antelación al inicio de los trabajos; si así no fuera, se promediará el error y se modificará la orientación de la antena de acuerdo con los resultados obtenidos del análisis sobre todos los elementos de la prueba. 4.6.4 Prueba de Cobertura Vertical El objetivo de esta prueba es determinar el patrón de cobertura radar, definiendo los límites inferior y superior, el borde interior, exterior y las zonas ciegas de detección, volando alternadamente la aeronave a diferentes altitudes (niveles de vuelo) en el acimut desde/hacia la antena radar a 3000, 4000, 7000, 10000, 13000, 16000 pies nivel medio del mar (MSL), hasta FL 200 con los cambios de altitud que se señalan en la gráfica anexa; se verificará: - el alcance de cobertura vertical; - el cono ciego; - la polarización vertical; - muestreos de los canales A y B; - el funcionamiento de la planta de energía de emergencia. - la temperatura ambiente exterior, una vez que la aeronave se estabilice en cada línea
de altitud /nivel de vuelo, para detectar posible efecto de inversión de temperatura. - la posición de la aeronave cada 10 millas, por abajo de 10000 pies, por posible falla en
la comunicación; Para esta prueba se requiere mantener vuelo visual (VFR) hasta 18,000 pies de altitud. 4.6.5 Prueba de Cobertura Horizontal Se volarán tres órbitas a 10, 20 y 30 MN en condiciones visual (VFR), al ángulo de detección más bajo donde se pueda tener cobertura con la altitud más baja posible. Se verificará: - La elevación de los obstáculos prominentes, de acuerdo a los reportes del piloto dentro de 20 MN, con el fin de situar la información de los mismos en el mapa video, para

Operación y Mantenimiento de los Sistemas de Radar Primario
211
- el vectoreo al patrón de tránsito y para determinar las altitudes mínimas de vectoreo (MVA´s) utilizables por el ATC. - Las zonas ciegas de detección por abajo de 10,000 pies de altura. Cuando se detecten una o varias zonas ciegas, estas se determinarán volando patrones de trayectorias por vectoreo y/o por arcos DME.
a).- en el plano horizontal, variando la trayectoria de la aeronave cada 10° de acimut en relación con la antena radar, para determinar los límites externos;
b).- en el plano vertical, volando dentro del patrón circular de los 360° y nivelando a diferentes altitudes con incrementos de 500 pies, para volver a interceptar la misma trayectoria a la distancia de la órbita en desarrollo donde se presento la pérdida, más o menos 1 MN de diferencia, hasta determinar el límite superior de la zona ciega. Cuando se detecte una zona ciega y dado que esta puede variar en tamaño, el equipo certificador de tierra evaluará la causa probable, las acciones de corrección requeridas y el efecto que esta pudiera tener sobre las funciones operativas de los Servicios de Tránsito Aéreo. 4.6.6 Prueba de Cobertura de Vuelo por Instrumentos (IFR) Se verificará la cobertura de detección: - Como ejemplo para el radar primario localizado en el aeropuerto de la ciudad de Cancún las Salidas y Llegadas Normalizadas que se anexan, como sigue: a.- En la trayectoria de aproximación y despegue de la pista 11 / 29 del aeropuerto de
CUN, desde/hasta la altitud mínima de ruta (MEA) más baja dentro de 25 MN del aeropuerto, hasta/desde el mapa (MAP) del procedimiento de aproximación IFR, ó 200 pies de altura sobre la superficie del aeropuerto, lo que sea más bajo.
b.- La alineación de la trayectoria de pista para despegue y/o aterrizaje; c.- La cobertura dentro del área de aproximación circulando del aeropuerto. - En una aproximación de vigilancia, desde 10 MN fuera hasta la altura de decisión (DH)
del umbral de pistas 12 y 30, efectuando el vuelo:
a) En la trayectoria de aproximación final;
b) A la altitud mínima de cobertura, 100 pies por debajo de las altitudes escalonadas o recomendadas para una aproximación de vigilancia, de acuerdo al perfil de descenso óptimo.
4.6.7 Prueba de Cobertura de Rutas y Aerovías Se determinará la precisión del video mapa a la altitud mínima a la cual se espera tener cobertura en diversas aerovías del sitio operativo representadas en la pantalla de visualización, se verificarán y se anotarán los datos sobre alineación o enlaces incorrectos

Operación y Mantenimiento de los Sistemas de Radar Primario
212
de rutas y aerovías, la falta o diferencia de intersecciones, puntos de reporte, radioayudas, aeropuertos, etc., según las necesidades operativas. 4.6.8 Pruebas Adicionales Para llevar a cabo las pruebas adicionales se podrá utilizar el avión verificador y/o ecos de oportunidad emitidos por otras aeronaves, de las que se pueda determinar correctamente su posición, de acuerdo a lo siguiente: - Alcance máximo. Si los resultados de cobertura en rutas no coinciden a satisfacción de los integrantes del equipo certificador del sistema radar, de acuerdo a la evaluación de las especificaciones del equipo, se podrá efectuar esta prueba para determinar el alcance máximo de cobertura en un radial, rumbo o sector específico. - Equipo alterno. Se comprobará el funcionamiento y operación del equipo alterno del sistema radar y del sistema de planta de electricidad de emergencia; durante el desarrollo de la prueba de cobertura vertical o en otro lapso que el equipo verificador de tierra lo considere necesario. - Procesamiento de datos. Se verificará el procesamiento del Sistema Radar Primario y Secundario Monopulso, observando la presentación en Modo 3/A de los códigos que active o cambie de activación el avión verificador 1200, 1500, 1577, 0400, 0420, 0707, 7500, 7600, 7700, del pulso de identificación especial (SPI) y del lector de altitud en Modo C; durante las pruebas vertical, de procedimientos IFR, de rutas y aerovías o en otro lapso de pruebas que el equipo verificador de tierra lo considere necesario.
- Se verificará en la pantalla radar la correcta visualización del procesamiento de datos radar (RDP), del plan de vuelo procesado (FDP) y sus funciones asociadas, según las especificaciones de los equipos; así como la visualización de las señales PSR y MSSR en el mosaico multiradar. Se podrán efectuar algunas otras pruebas adicionales que considere necesario el equipo certificador de tierra o aquellas que solicite la Subgerencia de los Servicios de Tránsito Aéreo, de las cuales se llevará un registro adecuado de las mismas.

Operación y Mantenimiento de los Sistemas de Radar Primario
213
4.7 Protocolo de Entrega Oficial del Sistema a los Operadores Una vez que se han concluido todas las pruebas técnicas con resultados satisfactorios y de que la parte operativa a dado por terminada la serie de pruebas de detección real del sistema de radar, se debe establecer un protocolo de entrega del sistema por parte del fabricante hacia el cliente en donde quede definida la composición del sistema que se está entregando. En dicho protocolo se debe considerar el levantamiento de un acta de entrega-recepción en donde se describan las fechas de inicio y culminación de las actividades del proyecto, la descripción de todas las partes principales que componen el sistema recién probado y el detalle de toda la documentación que el fabricante entrega y que debe ser parte del sistema. Dentro de los aspectos importantes que se deben incluir en este proceso destacan:
1. Procedimientos y resultados de las pruebas de aceptación técnica en fábrica (FAT) de cada una de las unidades del sistema.
2. Procedimientos y resultados de las pruebas de aceptación técnico en sitio (SAT) de cada una de las unidades del sistema.
3. Procedimientos y resultados de las pruebas libres adicionales solicitadas por el cliente.
4. Descripción de las partes componentes del sistema incluyendo su numero de serie.
5. Descripción detallada de la documentación técnica del sistema que debe ser entregada tanto en papel como en formato electrónico.
6. Descripción detallada de las licencias de los sistemas operativos (si aplican) y aplicaciones que se encuentren montados en el sistema.
Dicho documento deberá ser firmado tanto por el representante del fabricante así como por el representante del cliente. El propósito fundamental de este documento es la formalización de la entrega del sistema con todos los documentos que se generaron desde el inicio de su fabricación hasta su total entrega operativa y que constituye prácticamente el acta de nacimiento del sistema a la cual se podrá referir el personal especialista en el mantenimiento en caso de alguna falla del mismo. A continuación se incluye un tipo de formato de acta levantada en un sitio radar. La cual puede servir como referencia para la elaboración en otro campo de aplicación.

Operación y Mantenimiento de los Sistemas de Radar Primario
214
ACTA DE ENTREGA-RECEPCION 035/2000
RADAR SECUNDARIO MONOPULSO RSM-970 S
PUNTA VALENCIA (PVC)
En la ciudad de Puerto Valencia, Provincia de Jonjoy siendo las 15:00 hrs. del 12 de octubre del 2000, reunidos en el local que ocupan las oficinas de la Jefatura del Aeropuerto de esta localidad dependiente del Ministerio de Puertos, ubicadas en el Aeropuerto Internacional de esta ciudad y presentes los C. Ing. Eduardo Camarena González (“Quien entrega “) por parte de la Jefatura de Desarrollo de Sistemas Radar, dependiente de la Dirección de Sistemas Digitales Aeronáuticos; el C. Ing. Miguel Martínez García (“Quien recibe“) por parte de la Jefatura de Radar dependiente de la Subgerencia de Especialidad de IDS, el C. Martín Hernández Vélez, Gerente Regional Noroeste, y el CPT. Arturo Martínez Rosales, Encargado de Gastos de Inversión y Obra Pública de la Gerencia Regional Noroeste quienes actúan como testigos de asistencia, para hacer constar lo siguiente:
________________________________________________________________________ Con fecha 20 de septiembre del 2000 se inició el proceso de sustitución del radar secundario de ruta SIR-7 marca SELENIA, por el nuevo sistema de radar Secundario monopulso RSM-970S, el cual se concluyó el 29 de septiembre del 2000. El Sistema Radar Secundario monopulso que se entrega está conformado como se detalla a continuación:
CANT. SISTEMA NUMERO DE PARTE NUM . DE SERIE
1 AS909 A ANTENA SECUNDARIA 16 632 299 10320 1 EA2000A SISTEMA DE ARRASTRE 39 791 702 10048 1 JTA 3V JUNTA ROTATIVA 45 533 556 A/10021 1 AA2000 CONTROL DE ANTENA 46 138 046 10031 1 AE2000 GABINETE DE ENERGIA 47 083 289 10027 2 IR 2000 TX/RX TRANSMISOR/RECEPTOR SECUNDARIO
46 139 000
10009
2
RPC 2000/TD
PROCESADOR Y CORRELACIONADOR DE RESPUESTAS MSSR
47 034 334
CANAL A: 10067
CANAL B: 10065 1 ADU 2000 UNIDAD DE DISTRIBUCION DE DATOS DE
ANTENA 46 111 050 10035
1 RCMS RCMS consistente en: COMPUTADORA IBM Mod. 300GL
MONITOR IBM Tipo 6547-OBN
551GYM5 6636024
1 DRU UNIDAD DE REAGRUPAMIENTO DE DATOS 56 260 820
1 XOP 2000 ( LTM )
XOP2000 consistente en: COMPUTADORA PERSONAL IBM MOD. 300GL
MONITOR IBM TIPO: 6547-OBN
551GYM5 6636035
1 LAN ETHERNET LAN 2 MODEMS MODEMS PARA DATOS RADAR MARCA RAD
MODELO ASM-10/8 N/P: 6600030000 0080773 0080774
2 MODEMS MODEMS PARA RCMS MARCA CE MOD. SEMATRANS 256 N/P: PS 330-001
018014 018016

Operación y Mantenimiento de los Sistemas de Radar Primario
215
NOTA: El detalle de todos los componentes con Número de parte y Número de serie se establecen en el anexo NUM. 1 y son parte del protocolo de aceptación técnica en fábrica
El C. Ing. Eduardo Camarena González, en representación de la Jefatura de
Desarrollo de Sistemas Radar, hace entrega de los equipos relacionados anteriormente en estado óptimo de funcionamiento, según se acredita con los siguientes documentos: para el sistema de antena AS-909, prueba de aceptación técnica en fábrica (Factory Acceptance Test FAT) núm. 16 632 299-088.B; para el sistema RSM-970/S, procedimiento de aceptación y resultados de pruebas de aceptación técnica en fábrica (Factory Acceptance Test FAT) núm. 46 096 063-090 y 46 096 063-088; para el sistema RCMS, procedimiento de aceptación y resultados en sitio núm. 47 190 206-088 y 47 190 206-090 (Anexo 1); SAT (Site Acceptance Test) núm. 47 190 198-990 y 47 190 198-988 (Anexo 2); Pruebas libres (Anexo 3), manuales técnicos de mantenimiento y discos magnéticos del software instalado (anexo 4) mismos que se agregan a la presente acta, para los efectos conducentes. El C. Ing. Carlos Hernández García como titular de la Jefatura de Estación LMM, está de acuerdo en recibir el sistema de radar secundario monopulso RSM-970S, mismo que se entrega a su entera satisfacción. No encontrando impedimento alguno para iniciar el procedimiento de certificación operativa propuesto para el 9 de octubre, se da por terminada la presente actuación siendo las 15:00 horas del día de la fecha, firmando al calce para los efectos a que haya lugar ante los testigos de asistencia ________________________________ ___________________________ Ing. Carlos Hernández García. Ing. Eduardo Camarena González Jefe de Estación LMM Especialista Radar Licencia DGAC No. 11127 Licencia DGAC No.110099
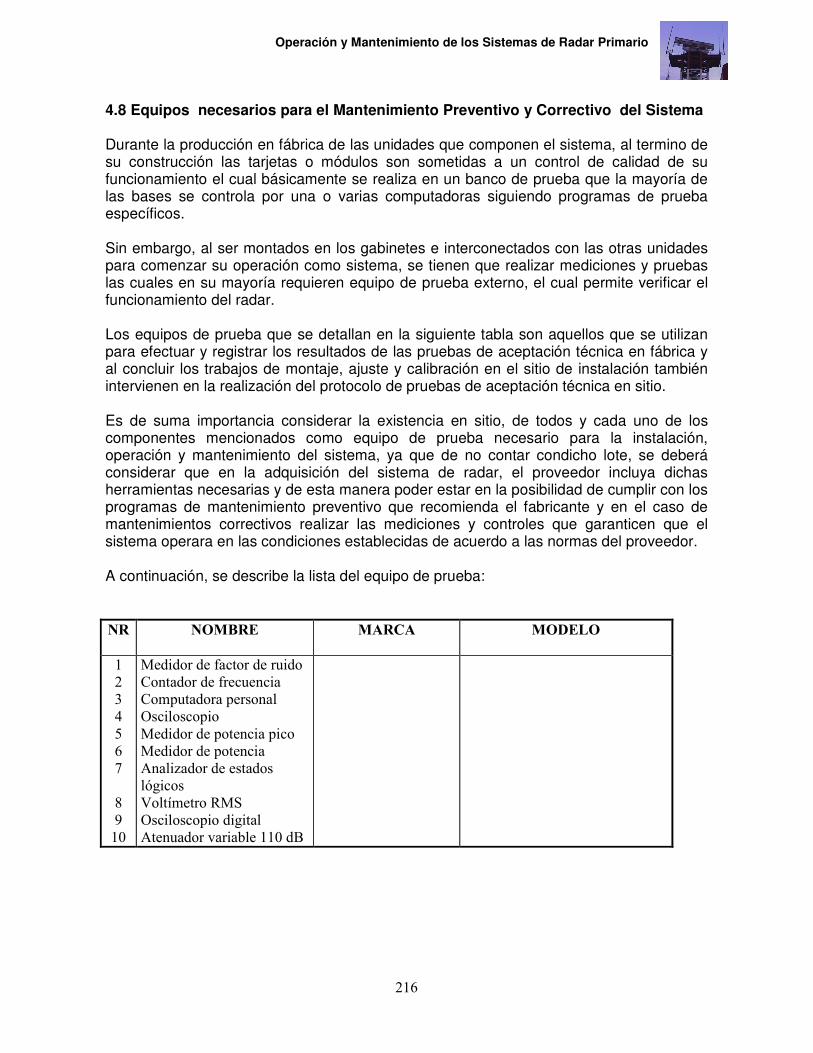
Operación y Mantenimiento de los Sistemas de Radar Primario
216
4.8 Equipos necesarios para el Mantenimiento Preventivo y Correctivo del Sistema Durante la producción en fábrica de las unidades que componen el sistema, al termino de su construcción las tarjetas o módulos son sometidas a un control de calidad de su funcionamiento el cual básicamente se realiza en un banco de prueba que la mayoría de las bases se controla por una o varias computadoras siguiendo programas de prueba específicos. Sin embargo, al ser montados en los gabinetes e interconectados con las otras unidades para comenzar su operación como sistema, se tienen que realizar mediciones y pruebas las cuales en su mayoría requieren equipo de prueba externo, el cual permite verificar el funcionamiento del radar. Los equipos de prueba que se detallan en la siguiente tabla son aquellos que se utilizan para efectuar y registrar los resultados de las pruebas de aceptación técnica en fábrica y al concluir los trabajos de montaje, ajuste y calibración en el sitio de instalación también intervienen en la realización del protocolo de pruebas de aceptación técnica en sitio. Es de suma importancia considerar la existencia en sitio, de todos y cada uno de los componentes mencionados como equipo de prueba necesario para la instalación, operación y mantenimiento del sistema, ya que de no contar condicho lote, se deberá considerar que en la adquisición del sistema de radar, el proveedor incluya dichas herramientas necesarias y de esta manera poder estar en la posibilidad de cumplir con los programas de mantenimiento preventivo que recomienda el fabricante y en el caso de mantenimientos correctivos realizar las mediciones y controles que garanticen que el sistema operara en las condiciones establecidas de acuerdo a las normas del proveedor. A continuación, se describe la lista del equipo de prueba: $R $OMBRE MARCA MODELO
1
2
3
4
5
6
7
8
9
10
Medidor de factor de ruido
Contador de frecuencia
Computadora personal
Osciloscopio
Medidor de potencia pico
Medidor de potencia
Analizador de estados
lógicos
Voltímetro RMS
Osciloscopio digital
Atenuador variable 110 dB

Operación y Mantenimiento de los Sistemas de Radar Primario
217
4.9 Boletines, Notificaciones y Circulares Técnicas Cuando se ha comenzado la explotación del sistema, los primeros meses de operación son de una completa familiarización entre los técnicos y las funciones y métodos de funcionamiento del mismo. A menudo se presentan dudas acerca de cómo intervenirlo, las cuales pueden ser aclaradas por medio de la consulta de la información técnica o bien, cuando debido a las condiciones del contrato de adquisición, se puede tener la asistencia en sitio de algún o algunos especialistas, los cuales pueden guiar a los técnicos noveles en la solución de los problemas o en el manejo del sistema. Al concluir el periodo de garantía (en la mayoría de los casos de un año) y de asistencia técnica en sitio, el cliente siempre puede recibir del proveedor la oportunidad de acceder a los servicios post-venta a través de un portal en el cual pueda continuar recibiendo asistencia técnica o bien consultar todas las notificaciones de carácter técnico que usualmente genera el fabricante y que para comodidad de los clientes pone a su disposición en este sitio. Al correr del tiempo, en el portal del fabricante, se publican para consulta, nuevas tecnologías, innovaciones o mejoras en algunos módulos, notificaciones de obsolescencia de partes y componentes, así como invitaciones a participar en algunos eventos en donde se realiza la presentación de los nuevos sistemas y aplicaciones. De igual manera, cuando la capacidad instalada de los sistemas de radar arroja que la atención es realizada por un grupo de técnicos o ingenieros especialistas, los cuales han tenido diferentes experiencias en la atención del mantenimiento y en la solución de los problemas técnicos que se han presentado, es de fundamental importancia que se tenga la posibilidad del intercambio de dichas experiencias con el propósito de fortalecer el conocimiento acerca del o los sistemas.

Operación y Mantenimiento de los Sistemas de Radar Primario
218
CAPITULO 5 RESULTADOS.
Aplicación en Campo En este capitulo aplicaremos la metodología desarrollada en el capitulo 4 en dos sistemas de radar primario con infraestructura de mantenimiento diferente. La metodología se aplicara en algunos en los procedimientos más representativos de la técnica utilizada en el mantenimiento del radar terminal México y del radar de superficie del aeropuerto de la ciudad de México. 5.1 Radar Terminal del Aeropuerto Internacional de la Ciudad de México Este es un sistema de radar que cuenta con radar primario y secundario que se utiliza para el control de tráfico aéreo en un área de 60 MN alrededor del aeropuerto de la Ciudad de México. La seguridad en el transito aéreo, se obtiene básicamente con una separación mínima en altitud y distancia entre aeronaves. La función del controlador de transito aéreo es la de mantener ordenado y expedito el movimiento de las aeronaves dentro de un determinado espacio aéreo. Previniendo con esto las colisiones entre aeronaves y con obstáculos. Cuando por necesidades de alto trafico aéreo es necesario reducir las separaciones mínimas. La utilización del radar primario es fundamental para conocer con precisión la ubicación de cada aeronave y renovar dicha información a un ritmo elevado; agregándose a la información de posición la información de altitud e identificación que proporciona el radar secundario. El radar de peñon fue instalado en el año de 1994. Es de fabricación Italiana y el modelo es ATCR-33 M. Este radar es de cuarta generación contando todavía con válvulas en el modulador y en la etapa de potencia. A lo largo de este tiempo se ha trabajado implantando diversas técnicas de mantenimiento que nos han permitido mantener funcionando en forma óptima los equipos de radar primario. Esto nos ha proporcionado una buena experiencia en el mantenimiento preventivo y correctivo de los sistemas de radar primario.

Operación y Mantenimiento de los Sistemas de Radar Primario
219
5.1.1 Programa de Mantenimiento Preventivo Mensual al Transmisor primario del
Radar México
Código: TX-PSR-01. MANTENIMIENTO PREVENTIVO MENSUAL AL TRANSMISOR PRIMARIO.
Vigencia: 8 de octubre del 2009.
Aplicar al Sistema:
Transmisor PSR
Descripción de Actividades:
Tiempo Requerido:
1 Desconectar energía primaria y aterrizar elementos que almacenen energía.
5 minutos
2 - Desactive la energía primaria y realice la limpieza exterior al gabinete y elementos discretos internos; revisar existencia de fugas de dieléctrico; limpieza y revisión del estado físico del cableado de alto voltaje; limpieza de los filtros de ventilación, revisión de ventiladores; verificar el estado físico y eléctrico de los fusibles y portafusibles.
60 minutos
3 - Verificar la Frecuencia del transmisor según procedimiento No. 7 del manual delTransmisor.
15 minutos
4 - Verificar Potencia directa y reflejada siguiendo el procedimiento No. 1 pag., 5-4-3 del manual “ATCR-33MTD Equipment”, así como la activación de la alarma respectiva en el tablero de control. Si PD es menor al valor de referencia (±±±± 5%) asentado en el formato FO-TX-01 anexo a la Bitácora de Lecturas, verificar voltajes de filamentos y verificar las formas de onda del transmisor. Referirse al procedimiento No. 8 pag., 5-4-17 del manual “ATCR-33MTD Transmitter”.
30 minutos
5 - Verificar la envolvente de R.F. del pulso de transmisión y medición del ancho del pulso. De acuerdo al procedimiento P-03
15 minutos
Página 1 de 3

Operación y Mantenimiento de los Sistemas de Radar Primario
220
6 - Verificar el Espectro en Frecuencia de la señal transmitida según procedimiento P-02 anexo al presente.
15 minutos
7 - Verificar la operación de la caja de engranajes del magnetrón y del control automático de frecuencia (±±±± 7 Mhz). Si no OK, corregir de acuerdo al Proc. No. B.4 pág. 5.4.19 del manual “ATCR-33MTD RCVR” Vol. 2.
15 minutos
8 - Verificar la señal de sincronía del transmisor según procedimiento P-VSS-TX-01 anexo al presente.
15 minutos
9 - Realizar el llenado del Formato FO-TX-01. Si algún oscilograma no es correcto, referirse al manual “ATCR-33MTD Transmitter” y corregir.
30 minutos
Tiempo Estimado de Ejecución: 3 horas 20 minutos Material y Equipo de Prueba a Utilizar:
- Utensilios de limpieza. - Multímetro. - Maletín de herramienta
milimétrica.
- Analizador de Espectros y/u Ondámetro.
- Diodo Detector - Osciloscopio. - Medidor de Potencia. - Cable para RF tipo “N” de 5m. - Cable de Video tipo “BNC” de
3 m.
- Carga de 50 Ώ Personal Requerido:
- 2 Especialistas de Radar. Documentos:
- Procedimiento: P-01 - Procedimiento: P-02 - Procedimiento: P-03 - Bitácora de Lecturas - Formato FO-TX-01.
Página 2 de 3
Operación y Mantenimiento de los Sistemas de Radar Primario
221
Referencias:
- Manual ATCR-33MTD RCVR Vol. 2.
- Manual ATCR-33MTD TRANSMITTER.
- Manual ATCR-33MTD EQUIPMENT.
Estado del
servicio radar durante el mantenimiento:
- Operativo.
Página 3 de 3

Operación y Mantenimiento de los Sistemas de Radar Primario
222
5.1.2 Formato del Mantenimiento Preventivo Mensual al Transmisor primario del
Radar México
Fecha: 5 de Julio del 2008 Estación: Radar México Canal: A Código FO-TX-01 Orden de trabajo: 231 1.- Lecturas Generales
PARAMETRO: REFERENCIA: CONDICIONES ACTUALES:
MAGN AVG CURR 40 ± 5 mA. 39 m A
HIGH VOLTAGE 4.8 ± 0.4 kV. 5.1 kV
SH DIO AVG CURR < 80 mA. 29 m A HV PWR AVR CURR 320 ± 50 mA. 290 m A
V. FIL. MAG. CAL. 18 ± 2 VCD. 19.50 VCD
V. FIL. MAG. RAD. 9 ± 1 VCD. 8.98 VCD
V. FIL. THYRATRON 6.3 ± 0.5 VCA 6.43 VCA
J11 (J7 = J15 = J19 = GND) +100 VCD 97.6 VCD J14 (J7 = J15 = J19 = GND) -100 VCD -84.5 VCD J17 (J7 = J15 = J19 = GND) +15 VCD 15.49 VCD J18 (J7 = J15 = J19 = GND) -15 VCD -15.42 VCD
2.- Espectro de Transmisión
CONFIGURACION: T.P.: J2 RF Head UNIDAD: Tx. FREC.: 2740 MHz SPAN: 10 MHz SWP: 100 ms VBW: 30 kHz REFERENCIA: - 10 dBm ATTEN.: 10 dB
Página 1 de 3

Operación y Mantenimiento de los Sistemas de Radar Primario
223
3.- Parámetros Generales
Parámetro: Referencia: Valor Actual: RELACIÓN DE LÓBULO PRINCIPAL A LÓBULO LATERAL
≥ 9 dB
11.20 dB
ANCHO DE PULSO 1 µs ± 200 ns
991.244 ns
POTENCIA DIRECTA (T.P. J2 RF Head)
350 kW pico ± 40 KW
310.4 kW
POTENCIA REFLEJADA (T.P. J1 RF Head)
3.65 kW
RELACIÓN DE ONDA ESTACIONARIA *
≤ 1.2
1.24
DESVIACIÓN EN FRECUENCIA ( C.A.F )
< 0.3 MHz
0.2 MHz
OPERACIÓN DE LA CAJA DE ENGRANES Correcto en ± 7 MHz. correcto
No. DE PLOT’s (Elemental, Pol. Circ.) 180
Referencia de la medición de relación de lóbulo principal a lóbulo secundario del espectro en frecuencia:
Página 2 de 3.
DP
RP
DP
RP
−
+
=
1
1
ROE

Operación y Mantenimiento de los Sistemas de Radar Primario
224
Se anexan referencias graficas de las mediciones tomadas:
Medición de potencia directa pico
Medición de ancho de pulso.

Operación y Mantenimiento de los Sistemas de Radar Primario
225
4.- Charging PFN Voltage
5.- Trigger
Observaciones: Se tiene excelente forma del espectro en frecuencia, buena relación de lóbulo
principal a lateral. Y un buen valor de potencia pico.
Responsable Técnico: Ing. Arturo Pintor Sill
Página 3 de 3
CONFIGURACION : TP: J5 MÓDULO: Charging PFN Regulator FV (CD) : 2 V
FH : 100 µµµµ s SINCRO: J16 Tx
CONFIGURACION: TP: J4 J7 = J15 = J19 = GND MÓDULO: Thyratron Assy FV (DC): 2 V
FH : 100 µµµµ s SINCRO: J16 Tx

Operación y Mantenimiento de los Sistemas de Radar Primario
226
5.1.3 Programa de Mantenimiento Preventivo Mensual al Receptor del Radar México
Aplicar al Sistema:
Receptor PSR.
Descripción de Actividades:
Tiempo Requerido:
1 - Desactive la energía primaria y realice la limpieza exterior al gabinete; partes internas; fuentes de voltaje externa e internamente y tarjetas de regulación.
30 minutos
2 - Verificar los Voltajes de las Fuentes de alimentación, de acuerdo al procedimiento a.1 del manual “ATCR-33M Receiver” Vol. 2 pags., 5-4-5.
15 minutos
3 - Realizar la medición de los niveles de Ruido Térmico de acuerdo al procedimiento No. b.5 del manual “ATCR – 33M Receiver “ Vol.2 pags. 5-4-23
15 minutos
4 - Realizar la medición de la Sensibilidad Tangencial (MDS) de acuerdo al procedimiento No. b.12 del manual “ATCR-33M Receiver” Vol. 2.
30 minutos
5 - Verificar la presencia en el monitor CDS-90 del símbolo de los 4 plots de prueba aplicando el Proc 04 al 07 del manual “ATCR-33M EQUIPMENT” pag. 3-3-45.
15 minutos
6 - Verificar en el indicador CDS-90 la presencia de los mapas de acuerdo al Procedimiento No. c-3, del manual “ATCR-33M RECEIVER”, Vol. 2 de 4. Si existe algún problema, realizar la carga manual de mapas y/o corregir.
30 minutos
7 - Realizar el llenado del formato CP-RX-01.
15 minutos
Tiempo Estimado de Ejecución: 2 horas 30 minutos Página 1 de 2
Código: RX-PSR-01.
MANTENIMIENTO PREVENTIVO MENSUAL
Vigencia: a partir del 8 de octubre del 2009.

Operación y Mantenimiento de los Sistemas de Radar Primario
227
Material y Equipo de Prueba a Utilizar:
- Utensilios de Limpieza. - Multímetro. - Osciloscopio. - Medidor de Potencia.
- Generador de RF. - Maletín de Herramienta
- Carga de 75 Ώ - Tres atenuadores de 30 dB. - Cable para RF tipo “N” de 5 m.
Personal Requerido:
- 2 Especialistas de Radar. Documentación: - Bitácora de Lecturas.
(Anexo FO-RX-01).
- Hoja de Control: CP-RX-01. Referencias: - Bitácora de Lecturas.
(Anexo FO-RX-01).
- Hoja de Control: CP-RX-01. - Manual “ATCR-33M Receiver”
Vol. 2
- Manual “ATCR-33M EQUIPMENT”. Estado del
servicio radar durante el mantenimiento:
- Operativo. Página 2 de 2

Operación y Mantenimiento de los Sistemas de Radar Primario
228
5.1.4 Formato de Mantenimiento Preventivo Mensual al Receptor del Radar Primario México
Fecha: 29 de julio del 2008 Estación: México Canal: A
Código: CP-RX-01 Orden de trabajo: Folio 232
1.- Fuentes de Voltaje
POSICIÓN DEL SELECTOR: REFERENCIA: LECTURA:
PS1 + 5 ± 0.25 VCD 5.25 VCD PS2 - 5 ± 0.25 VCD 5.25 VCD
+ 12 V. + 12 ± 0.6 VCD +12.5 VCD - 12 V. - 12 ± 0.6 V CD -12.52 VCD + 15 V. + 15 ± 0.75 VCD +15.6 VCD - 15 V. - 15 ± 0.75 VCD -15.58 VCD
+ 24 V NR. + 24 ± 4.8 VCD 27.00 VCD 2.- Parámetros Parámetro Valor de Referencia Valor Actual Nivel de Ruido RMS a nivel F.I.: 15 mV RMS ±±±±1 mV 6.8 m V
Nivel de Sensibilidad Tangencial: Mejor que - 106 dBm. - 102 dBm
Plots de prueba ( 4 ) Presencia Fuera de servicio
3.- Verificar Presencia de Mapas Operativos ()
WSM CM FAN2 FAN6
STC FAN FAN3 FAN7
BC FAN0 FAN4 LIGHT RAIN
LDM FAN1 FAN5 STRONG RAIN
Observaciones: Se requiere cambio de mezclador de los blancos de prueba (TTG).
Responsable Técnico: Ing. Arturo Pintor Sill

Operación y Mantenimiento de los Sistemas de Radar Primario
229
Se anexan referencias graficas de las mediciones tomadas: Valor pico-pico del Ruido Térmico
Valor RMS del Ruido Térmico
Medición de la Sensibilidad del receptor

Operación y Mantenimiento de los Sistemas de Radar Primario
230
Visualización del Mapa de control de sensibilidad en el tiempo (STC).
Visualización del mapa del combinador de haces (BC).
Visualización del Mapa del Normalizador de Falsas Alarmas (FAN).

Operación y Mantenimiento de los Sistemas de Radar Primario
231
5.1.5 Programa de Mantenimiento Preventivo Semestral al Transmisor –Receptor del
Radar Primario México
Código: TX/RX-PSR-02. MANTENIMIENTO PREVENTIVO SEMESTRAL
Vigencia: 07 de Octubre 2008
Aplicar al Sistema:
Transmisor/Receptor PSR.
Descripción de Actividades:
Tiempo Requerido:
1 - Realizar el llenado del Formato Código: FO-TX-02.
2 horas
2
- Verificar el funcionamiento del Combinador de Haces de acuerdo al Procedimiento No. b.3 manual 2 ATCR-33 M
45 minutos
3 - Verificar la frecuencia y potencia del Oscilador Local Estabilizado (STALO), de acuerdo al procedimiento No. b.1 Manual 2 ATCR-33 M
60 minutos
4 - Verificar la Frecuencia y Potencia del COHO, de acuerdo al procedimiento P-12
30 minutos
5 - Verificación del amarre en fase del Oscilador Coherente (COHO), de acuerdo al procedimiento P-21
45 minutos
6 - Verificar la Ganancia del receptor de acuerdo al procedimiento b.9 del Manual 2 ATCR-33 M.
45 minutos
7 - Verificar la operación del Control Automático de Frecuencia de acuerdo al Procedimiento P-14
45 minutos
8 - Realizar el llenado del Formato
FO-RX-01. Si algún oscilograma no es correcto, referirse al manual “ATCR-33M Receiver” y corregir.
3 horas
Tiempo Estimado de Ejecución: 9 horas 30 minutos
Página 1 de 2

Operación y Mantenimiento de los Sistemas de Radar Primario
232
Material y Equipo de Prueba a Utilizar:
- Utensilios de limpieza. - Multímetro. - Maletín de herramienta milimétrica. - Analizador de Espectros
y/u Ondámetro.
- Diodo Detector - Osciloscopio. - Medidor de Potencia. - Cable para R.F. tipo “N” de 5m. - Cable de Video tipo “BNC” de 3 m. - Carga de 50 Ώ BNC. - Conector “T” BNC. Personal Requerido:
- 2 Especialistas de Radar. Documentos: - Bitácora de Lecturas - Formato: FO-TX-01. - Manual ATCR-33MTD EQUIPMENT. - Procedimiento: P-12. - Procedimiento: P-14. - Procedimiento: P-21.
Referencias:
- Manual ATCR-33MTD RCVR Vol. 2.
- Manual ATCR-33MTD TRANSMITTER.
- Manual ATCR-33MTD EQUIPMENT. Estado del
servicio radar durante el mantenimiento:
- Operativo. Página 2 de 2

Operación y Mantenimiento de los Sistemas de Radar Primario
233
5.1.6 Formato de Mantenimiento Preventivo Semestral al Transmisor-Receptor del Radar Primario México
Fecha: 5 de Julio del 2008 Estación: Radar México Canal: A Código FO-TX-01 Orden de trabajo: 231
1.- Lecturas Generales:
PARAMETRO: REFERENCIA: CONDICIONES ACTUALES:
MAGN AVG CURR 40 ± 5 mA. 39 m A HIGH VOLTAGE 4.8 ± 0.4 kV. 5.1 kV SH DIO AVG CURR < 80 mA. 29 m A HV PWR AVR CURR 320 ± 50 mA. 290 m A V. FIL. MAG. CAL. 18 ± 2 VCD. 19.50 VCD V. FIL. MAG. RAD. 9 ± 1 VCD. 8.98 VCD V. FIL. THYRATRON 6.3 ± 0.5 VCA 6.43 VCA FUENTE + 100 VCD 100 ± 5 VCD 97.6 VCD FUENTE – 100 VCD -100 ± 5 VCD -84.5 VCD FUENTE + 15 VCD +15 ± 1 VCD 15.49 VCD FUENTE -15 VCD - 15 ± 1 VCD -15.42 VCD
2.- Espectro de Transmisión
CONFIGURACION: T.P.: J2 RF Head UNIDAD: Tx FREC.: 2740 MHz SPAN: 10 MHz SWP: 100 ms VBW: 30 kHz REFERENCIA: - 10 dBm ATTEN.: 10 dB
Página 1 de 7

Operación y Mantenimiento de los Sistemas de Radar Primario
234
3.- Parámetros Generales
Parámetro: Referencia: Valor Actual: RELACIÓN DE LÓBULO PRINCIPAL A LÓBULO LATERAL
≥ 9 dB
11.20 dB
ANCHO DE PULSO 1 µs ± 200 ns 991.244 ns
POTENCIA DIRECTA (T.P. J2 RF Head)
350 kW pico ± 20 kW.
310.4 kW
POTENCIA REFLEJADA (T.P. J1 RF Head)
No hay referencia
3.65 kW
RELACIÓN DE ONDA ESTACIONARIA *
≤ 1.2
1.24
DESVIACIÓN EN FRECUENCIA
< 0.3 Mhz.
0.2 MHz
No. DE PLOT’s (Elemental, Pol. Circ.) No hay referencia 180
4.- Trigger Test
CONFIGURACION: TP: J16 (con carga de 75 ΩΩΩΩ) UNIDAD: TX FV (DC): 2 V FH: 200 n s SINCRO: CHA-1 del OSC.
Página 2 de 7
DP
RP
DP
RP
−
+
=
1
1
ROE

Operación y Mantenimiento de los Sistemas de Radar Primario
235
5.- Shunt
6.- Corriente del Regulador
7.- Charging PFN Voltage
CONFIGURACION : TP: J5 MÓDULO: Charging PFN Regulator FV (AC) : 2 V
FH : 100 µµµµ s SINCRO: J16 TX
CONFIGURACION: TP: J13 UNIDAD: Tx FV (A.C.) : 2 V
FH : 10 µµµµ s SINCRO: J16 TX
CONFIGURACION TP: J10 UNIDAD: Tx FV (AC): 2 V
FH: 100 µµµµ s SINCRO: J16 TX
Página 3 de 7

Operación y Mantenimiento de los Sistemas de Radar Primario
236
8.- Ripple Voltage
9.- Chg PFN Ref
10.- SCR Trigger Test
CONFIGURACION TP: J4 MÓDULO: Charging PFN Regulator
FV (AC): 2 V
FH: 100 µµµµ s SINCRO: J16 TX
CONFIGURACION TP: J2 MÓDULO: Charging PFN Regulator FV (AC) : 200 mV
FH : 200 µµµµ s SINCRO: J16 Tx
CONFIGURACION TP: J3 MÓDULO: Charging PFN Regulator FV (AC): 2 V
FH: 100 µµµµ s SINCRO: J16 TX
Página 4 de 7

Operación y Mantenimiento de los Sistemas de Radar Primario
237
11- Trigger
12.- Gate
13.- G2 THYR
CONFIGURACION: TP: J4 J7 = J15 = J19 = GND MÓDULO: Thyratron Assy FV (DC): 2 V
FH : 1 µµµµ s SINCRO: J16 Tx
CONFIGURACION: TP: J5 J7 = J15 = J19 = GND MÓDULO: Thyratron Assy FV (DC): 5 V
FH : 100 µµµµ s
SINCRO: J16 TX &&&& Stagger Off
CONFIGURACION : TP: J6 J7 = J15 = J19 = GND MÓDULO: Thyratron Assy FV (DC): 5 V (punta x 10)
FH : 50 µµµµ s
SINCRO: J16 TX
Página 5 de 7

Operación y Mantenimiento de los Sistemas de Radar Primario
238
14.- Sobre Corriente de Magnetrón
15.- Pulse Inhibit
16.- Sobre Corriente de HVPS
CONFIGURACION: TP: J8 J7 = J15 = J19 = GND MÓDULO: Thyratron Assy. FV (DC): 2 V
FH : 100 µµµµ s SINCRO: J16 TX
CONFIGURACION: TP: J16 J7 = J15 = J19 = GND MÓDULO: Thyratron Assy FV (DC) : 2 V
FH : 100 µµµµ s SINCRO: J16 TX
CONFIGURACION: TP: J9 J7 = J15 = J19 = GND MÓDULO: Thyratron Assy FV (DC) : 2 V
FH : 100 µµµµ s
SINCRO: J16 TX
Página 6 de 7

Operación y Mantenimiento de los Sistemas de Radar Primario
239
17.- Envolvente del Pulso de Tx 18.- Fuentes de Voltaje del Módulo Thyratron Assy
FUENTE REFERENCIA VALOR ACTUAL
J11 +100 VCD 97.6 VCD
J14 -100 VCD -84.5 VCD
J17 +15 VCD 15.49 VCD
J18 -15 VCD -15.42 VCD
Observaciones: Se observa fuente de -100 VCD con un valor de -84.5 VCD. La potencia
directa esta por abajo del valor nominal.
Responsable Técnico: Ing. Arturo Pintor Sill. Página 7 de 7
CONFIGURACIÓN: TP: J2 MÓDULO: RF Head FV (DC): 100 mV FH : 500 n s SINCRO: J16 TX
REFERENCIA: ττττ = 1138 ns
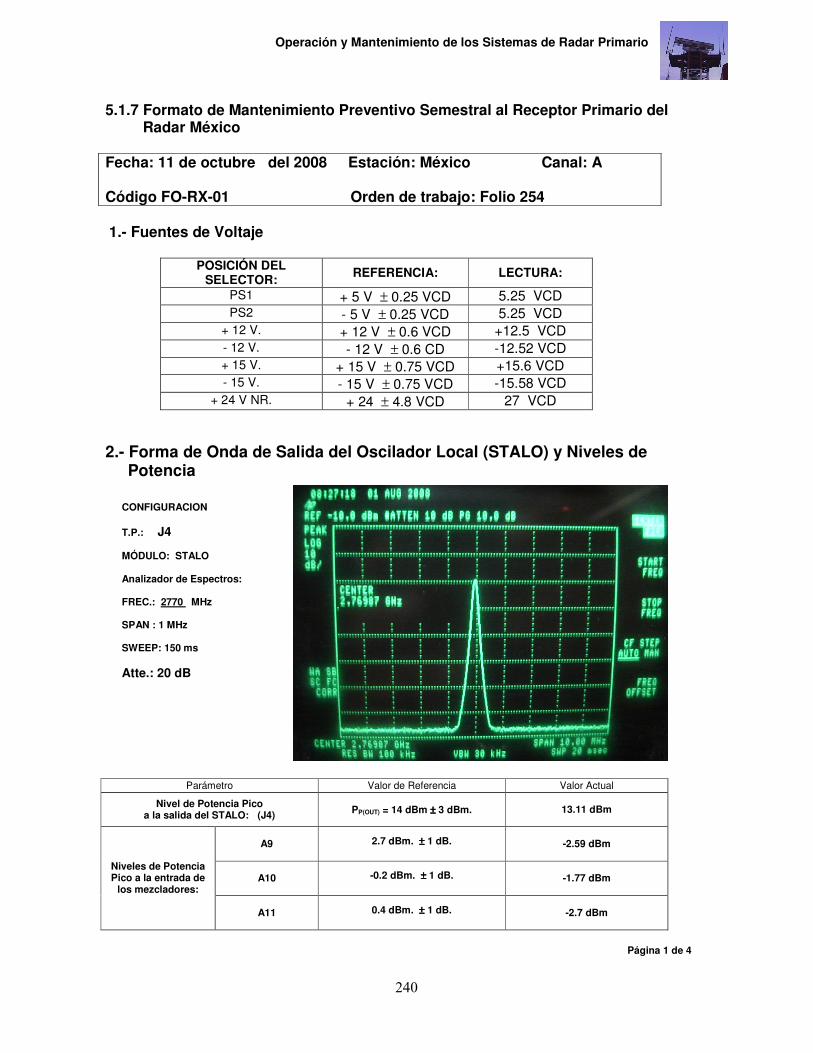
Operación y Mantenimiento de los Sistemas de Radar Primario
240
5.1.7 Formato de Mantenimiento Preventivo Semestral al Receptor Primario del
Radar México
Fecha: 11 de octubre del 2008 Estación: México Canal: A Código FO-RX-01 Orden de trabajo: Folio 254
1.- Fuentes de Voltaje
POSICIÓN DEL SELECTOR: REFERENCIA: LECTURA:
PS1 + 5 V ± 0.25 VCD 5.25 VCD PS2 - 5 V ± 0.25 VCD 5.25 VCD
+ 12 V. + 12 V ± 0.6 VCD +12.5 VCD - 12 V. - 12 V ± 0.6 CD -12.52 VCD + 15 V. + 15 V ± 0.75 VCD +15.6 VCD - 15 V. - 15 V ± 0.75 VCD -15.58 VCD
+ 24 V NR. + 24 ± 4.8 VCD 27 VCD
2.- Forma de Onda de Salida del Oscilador Local (STALO) y Niveles de Potencia
Página 1 de 4
Parámetro Valor de Referencia Valor Actual
Nivel de Potencia Pico a la salida del STALO: (J4) PP(OUT) = 14 dBm ±±±± 3 dBm. 13.11 dBm
A9 2.7 dBm. ±±±± 1 dB. -2.59 dBm
A10 -0.2 dBm. ±±±± 1 dB. -1.77 dBm Niveles de Potencia Pico a la entrada de
los mezcladores:
A11 0.4 dBm. ±±±± 1 dB. -2.7 dBm
CONFIGURACION T.P.: J4 MÓDULO: STALO Analizador de Espectros: FREC.: 2770 MHz SPAN : 1 MHz SWEEP: 150 ms Atte.: 20 dB

Operación y Mantenimiento de los Sistemas de Radar Primario
241
3.- Forma de Onda de Salida del Oscilador Coherente y Nivel de Potencia
Parámetro. Valor de Referencia Valor Actual
Nivel de Potencia Pico a la salida del Oscilador Coherente: (J3) PP(OUT) = 10 dBm ±±±± 1 dBm. 10.4 dBm.
4.- Valores de Ganancia del Receptor Analógico
Parámetros Canal Valor de referencia Valor Actual
main Mejor que 35 dB 35.85 dB Ganancia del Amplificador de Bajo Ruido:
aux No hay referencia No hay referencia
main 7 mV RMS ±±±±1 mV 8.2 m v Nivel de Ruido RMS a nivel F.I.:
aux No hay referencia 6.2 m V
main Mejor que - 106 dBm. -104 dBm Nivel de Sensibilidad Tangencial:
aux Mejor que -104 dBm pendiente
Ganancia desde el Limitador
Coaxial hasta el amplificador de
FI: 60
main Mejor que 76 dB. 60dB
Control Automático de Ganancia
(AGC). main
Nivel de ruido RMS 7mv RMS ±±±±1
mV 7 mV
Página 2 de 4
CONFIGURACION TP: J2 MÓDULO: COHERENTE Analizador de Espectros: FREC.: 30 MHz SPAN : 1 MHz SWEEP: 150 ms Atte.: 20 dB
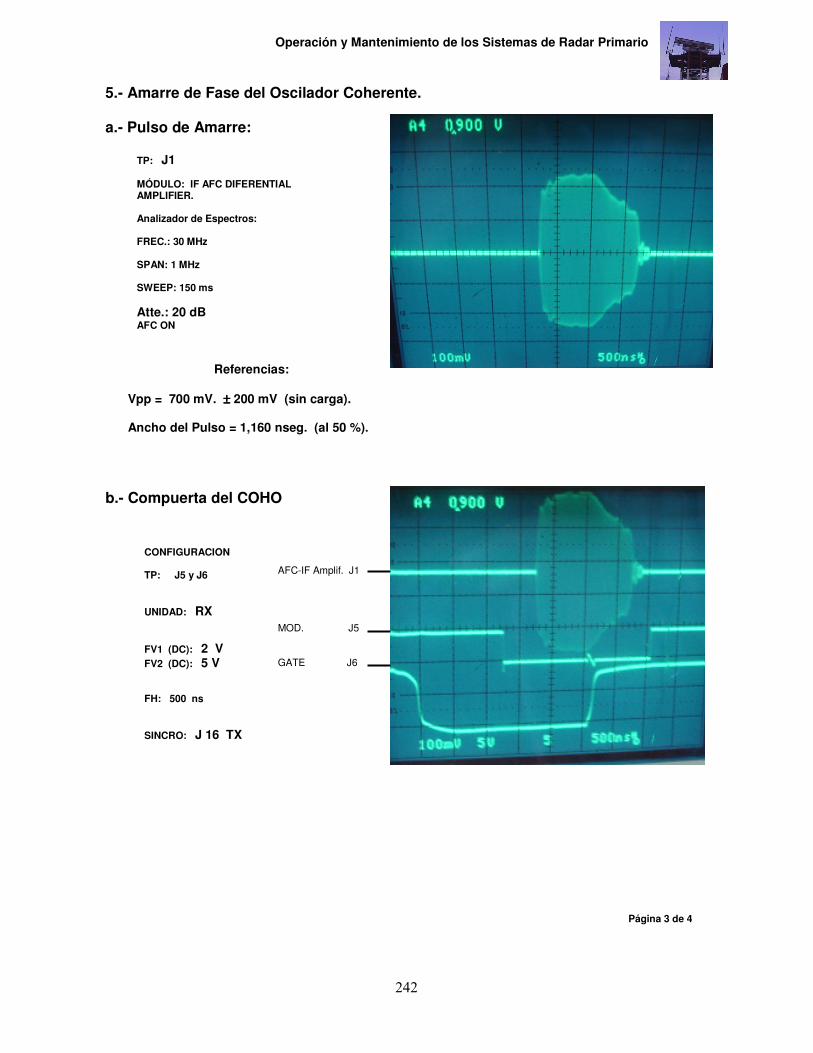
Operación y Mantenimiento de los Sistemas de Radar Primario
242
TP: J1 MÓDULO: IF AFC DIFERENTIAL AMPLIFIER. Analizador de Espectros: FREC.: 30 MHz SPAN: 1 MHz SWEEP: 150 ms Atte.: 20 dB AFC ON
5.- Amarre de Fase del Oscilador Coherente. a.- Pulso de Amarre:
b.- Compuerta del COHO
Página 3 de 4
Referencias:
Vpp = 700 mV. ±±±± 200 mV (sin carga). Ancho del Pulso = 1,160 nseg. (al 50 %).
CONFIGURACION TP: J5 y J6 UNIDAD: RX FV1 (DC): 2 V FV2 (DC): 5 V FH: 500 ns SINCRO: J 16 TX
AFC-IF Amplif. J1
MOD. J5
GATE J6

Operación y Mantenimiento de los Sistemas de Radar Primario
243
CONFIGURACION TP: J1 MÓDULO: IF AFC DIFERENTIAL AMPLIFIER. Analizador de Espectros: FREC.: __________ MHz SPAN : 1 MHz SWEEP: 150 ms Atte.: 20 dB AFC ON
CONFIGURACION: TP.: J2 o J3 UNIDAD: Rx Módulo: COHO LOCKED NP- 818620. FV (DC): 1 V FH = 500 ns SINCRO: J16 TX P AVE = 9.2 dBm
c. Amarre de Fase del Oscilador Coherente
6.- Control Automático de frecuencia (AFC) Observaciones: No se pudo medir la sensibilidad en el canal auxiliar (cobertura alta) debido a que para verificar este parámetro se requiere cortar el servicio Radar. Por otro lado debido a falta de sensibilidad del analizador de espectro no se pudo medir el espectro en frecuencia de la muestra de señal de transmisión a 30 MHz utilizada en CAF. Se observa un poco bajo el nivel de potencia del Oscilador Local.
Responsable Técnico: Ing. Arturo Pintor Sill.
Página 4 de 4

Operación y Mantenimiento de los Sistemas de Radar Primario
244
5.2 Radar de Superficie del Aeropuerto Internacional de la ciudad de México Este es un sistema de radar primario con una cobertura de 10 MN, que nos permite ubicar la posición tanto de las aeronaves y vehículos sobre las pistas y calles de rodaje del aeropuerto. La información del radar de superficie se utiliza por los controladores de transito aéreo localizados en la torre de control del aeropuerto de México. El radar primario forma parte de un sistema de control y guía del movimiento terrestre en el aeropuerto de México. Bajo cualquier condición meteorológica el sistema de control proporciona a los controladores:
- Una situación comprensiva del tráfico superficial con una identificación y localización precisa de lo móviles localizados en las áreas dentro del aeropuerto.
- Alarmas oportunas de riesgo de colisión y acceso no autorizado a pistas. - Integración de la información del aeropuerto y la de control de tráfico aéreo.
El radar de superficie esta conformado por un radar primario con su procesador de señal, el extractor de video y su unidad de seguimiento. La denominada cabeza radar se localiza en una caseta a 43 m. de altura y consta de:
- Antena. - Transmisor (duplicado). - Receptor (duplicado). - Procesador de señal (duplicado). - Pantalla indicadora.
La parte de tratamiento esta localizada en un compartimiento en la planta baja de la torre de control México. Y en este se encuentra localizado:
- El extractor de video (duplicado). - La unidad de seguimiento (duplicado). - Unidad de grabación (duplicado). - Unidad de reproducción. - Unidad de conflictos (alarmas) (duplicado). - Unidad de fusión del radar de superficie con el radar de exploración (duplicado). - Unidad de visualización para 3 posiciones.

Operación y Mantenimiento de los Sistemas de Radar Primario
245
5.2.1 Programa de Mantenimiento Preventivo Mensual al Transmisor del Radar de Superficie
Código: TX-PSR-ASDE-01. MANTENIMIENTO PREVENTIVO MENSUAL
Vigencia: 15 de Octubre 2009
Aplicar al Sistema:
Transmisor PSR - ASDE
Descripción de Actividades:
Tiempo Requerido:
1 - Desconectar energía primaria y aterrizar elementos que almacenen energía.
15 minutos
2 - Desactive la energía primaria y realice la limpieza exterior al gabinete y elementos discretos internos; limpieza y revisión del estado físico del cableado de alto voltaje; limpieza de los filtros de ventilación, revisión de ventiladores; verificar el estado físico y eléctrico de los fusibles y porta fusibles.
60 minutos
3 - Verificar la Frecuencia del Transmisor según procedimiento G11 del manual de documentación técnica 1/1.
20 minutos
4 - Verificar la Potencia directa según el procedimiento G8 del manual de documentación técnica 1/1.
20 minutos
5 - Verificar la Envolvente de R.F. del pulso de transmisión y medición del ancho del pulso según el procedimiento G11 del manual de documentación técnica 1/1.
20 minutos
6 - Verificar el Espectro en frecuencia de la señal transmitida según el procedimiento G11 del manual de documentación técnica 1/1
20 minutos
7 - Verificar la señal de Sincronía en punto de prueba frontal
15 minutos
Página 1 de 2

Operación y Mantenimiento de los Sistemas de Radar Primario
246
8 - Realizar el llenado del Formato de control Código ASDE TX-01
30 minutos
Tiempo Estimado de Ejecución: 3 horas 20 minutos Material y Equipo de Prueba a Utilizar:
- Utensilios de limpieza. - Multímetro. - Maletín de herramienta
milimétrica.
- Analizador de Espectros y/u Ondámetro.
- Diodo Detector - Osciloscopio. - Medidor de Potencia. - Cable para R.F. tipo “N” de 5 m. - Cable de Video tipo “BNC” de 3m. - Carga de 50 Ώ BNC. - Conector “T” BNC. Personal Requerido:
- 2 Especialistas de Radar. Documentos: - Procedimiento: G8 - Procedimiento: G11 - Formato ASDE-02 - Formato ASDE Tx-01
Referencias:
- Manual técnico 1/1
Estado del servicio radar durante el mantenimiento:
- Operativo. Página 2 de 2

Operación y Mantenimiento de los Sistemas de Radar Primario
247
5.2.2 Formato de Mantenimiento Preventivo Mensual al Transmisor del Radar de Superficie Fecha: 8 de enero del 2009 Estación: México Canal: 1 Código FO-TX-ASDE 01 Orden de Trabajo: Folio 266
1.- Lecturas Generales
PARAMETRO: REFERENCIA: CONDICIONES
ACTUALES:
MAGN AVG CURR N N HIGH VOLTAGE N -1 POTENCIA N +2 TRANSMITTER TRIP Apagado
MAGNETRON ARCING Apagado
HEATING FAILURE Apagado
TEMPERATURE FAILURE Apagado
HV OVERCURRENT Apagado
LV FAILURE Apagado
STACK VMOS FAILURE Apagado
HV FAILURE Apagado
2.- Espectro de Transmisión:
Página 1 de 2
CONFIGURACION: T.P.: J2 RF Head UNIDAD: Tx FREC.: 16.37 GHz SPAN: 100 MHZ SWP: 50 ms VBW: 300 kHz REFERENCIA: - 10 dBm ATTEN.: 10 dB

Operación y Mantenimiento de los Sistemas de Radar Primario
248
3.- Parámetros Generales
Parámetro: Referencia: Valor Actual: RELACIÓN DE LÓBULO PRINCIPAL A LÓBULO LATERAL
≥ 9 dB
10.3 dB
ANCHO DE PULSO 40 ns ± 5 ns
41 ns.
POTENCIA DIRECTA (T.P. Acoplador RF switch)
20 kW
39 kW
DESVIACIÓN EN FRECUENCIA ( C.A.F )
±20Mhz.
5 MHz.
4.- Prueba de Sincronía
Observaciones: Se observan variaciones de potencia de 39 kW a 25 kW con distorsión del ancho
de pulso. Así como variaciones de amplitud del espectro de transmisión, se observa la lectura de
Alto Voltaje estable.
Responsable Técnico: C. José Luís Rodríguez.
Página 2 de 2
CONFIGURACION : TP: J502 MÓDULO: BWJ05 FV (D.C.) : 2 V FH : 20 µµµµ s SINCRO: Sincro TF T = 122 µµµµ s Vp = 5 V
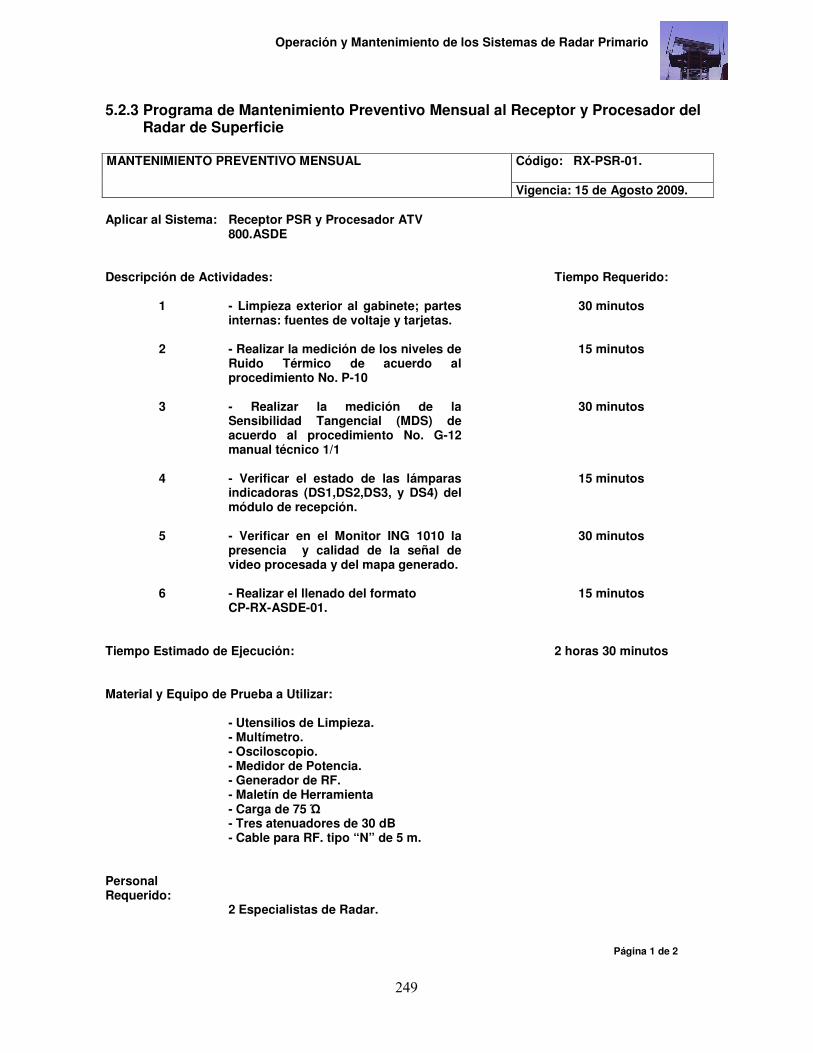
Operación y Mantenimiento de los Sistemas de Radar Primario
249
5.2.3 Programa de Mantenimiento Preventivo Mensual al Receptor y Procesador del
Radar de Superficie
Aplicar al Sistema:
Receptor PSR y Procesador ATV 800.ASDE
Descripción de Actividades:
Tiempo Requerido:
1 - Limpieza exterior al gabinete; partes internas: fuentes de voltaje y tarjetas.
30 minutos
2 - Realizar la medición de los niveles de Ruido Térmico de acuerdo al procedimiento No. P-10
15 minutos
3 - Realizar la medición de la Sensibilidad Tangencial (MDS) de acuerdo al procedimiento No. G-12 manual técnico 1/1
30 minutos
4 - Verificar el estado de las lámparas indicadoras (DS1,DS2,DS3, y DS4) del módulo de recepción.
15 minutos
5 - Verificar en el Monitor ING 1010 la presencia y calidad de la señal de video procesada y del mapa generado.
30 minutos
6 - Realizar el llenado del formato CP-RX-ASDE-01.
15 minutos
Tiempo Estimado de Ejecución: 2 horas 30 minutos Material y Equipo de Prueba a Utilizar:
- Utensilios de Limpieza. - Multímetro. - Osciloscopio. - Medidor de Potencia.
- Generador de RF. - Maletín de Herramienta
- Carga de 75 Ώ - Tres atenuadores de 30 dB - Cable para RF. tipo “N” de 5 m.
Personal Requerido:
2 Especialistas de Radar. Página 1 de 2
Código: RX-PSR-01.
MANTENIMIENTO PREVENTIVO MENSUAL
Vigencia: 15 de Agosto 2009.

Operación y Mantenimiento de los Sistemas de Radar Primario
250
Documentación: - Bitácora de Lecturas. - Hoja de Control: CP-RX- ASDE 01. - Procedimiento G-12 - Procedimiento P-10 Referencias: - Manual técnico ASTRE 2000. Estado del
servicio radar durante el mantenimiento:
- Operativo. Página 2 de 2
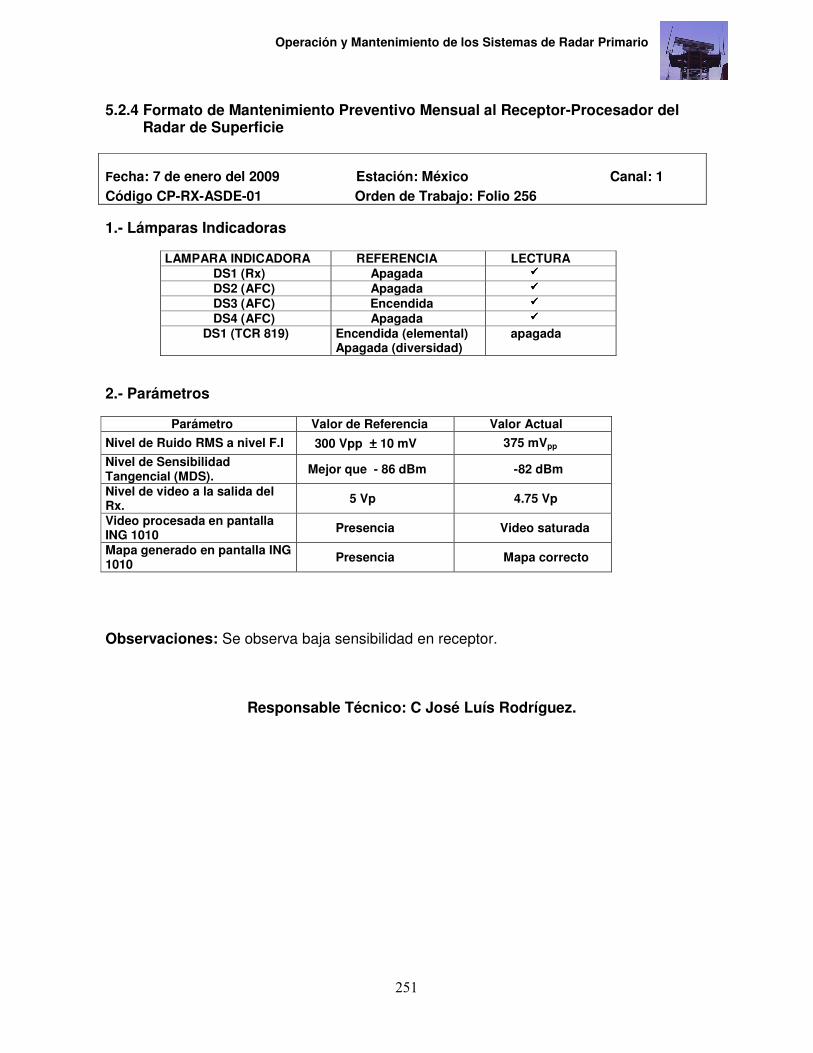
Operación y Mantenimiento de los Sistemas de Radar Primario
251
5.2.4 Formato de Mantenimiento Preventivo Mensual al Receptor-Procesador del
Radar de Superficie
Fecha: 7 de enero del 2009 Estación: México Canal: 1 Código CP-RX-ASDE-01 Orden de Trabajo: Folio 256 1.- Lámparas Indicadoras
LAMPARA INDICADORA REFERENCIA LECTURA DS1 (Rx) Apagada DS2 (AFC) Apagada DS3 (AFC) Encendida DS4 (AFC) Apagada DS1 (TCR 819) Encendida (elemental)
Apagada (diversidad) apagada
2.- Parámetros Parámetro Valor de Referencia Valor Actual
Nivel de Ruido RMS a nivel F.I 300 Vpp ±±±± 10 mV 375 mVpp
Nivel de Sensibilidad Tangencial (MDS). Mejor que - 86 dBm -82 dBm
Nivel de video a la salida del Rx. 5 Vp 4.75 Vp
Video procesada en pantalla ING 1010 Presencia Video saturada
Mapa generado en pantalla ING 1010 Presencia Mapa correcto
Observaciones: Se observa baja sensibilidad en receptor. Responsable Técnico: C José Luís Rodríguez.

Operación y Mantenimiento de los Sistemas de Radar Primario
252
5.2.5 Programa de Mantenimiento Preventivo Semestral al Transmisor-Receptor
del radar de Superficie
Código: TX/RX-PSR-02. MANTENIMIENTO PREVENTIVO SEMESTRAL
Vigencia: 14 de Agosto 2009
Aplicar al Sistema:
Transmisor/Receptor PSR.
Descripción de Actividades:
Tiempo Requerido:
1 - Verificar la frecuencia y potencia del Oscilador Local, de acuerdo al procedimiento P-11
30 minutos
2 - Verificar la Ganancia del Receptor de acuerdo al procedimiento P-08
30 minutos
3 - Verificar el Ancho de Banda del Receptor de acuerdo al procedimiento P-16
30 minutos
4 - Verificar la operación del Control Automático de Frecuencia (CAF) de acuerdo al Procedimiento P-14
30 minutos
5 - Verificar el tiempo de des ionización del T/R del Duplexor de acuerdo al procedimiento C1 del manual de documentación técnica.
30 minutos
6 - Realizar el llenado del Formato FO-RX-02 ASDE.
3 horas
7 - Verificar el funcionamiento del Deshidratador y su conexión a la guía de onda.
30 minutos
Tiempo Estimado de Ejecución: 6 horas 30 minutos
Página 1 de 2

Operación y Mantenimiento de los Sistemas de Radar Primario
253
Material y Equipo de Prueba a Utilizar:
- Utensilios de limpieza. - Multímetro. - Maletín de herramienta
milimétrica.
- Analizador de Espectro - Generador de RF. - Osciloscopio. - Medidor de Potencia. - Cable de R.F. con conectores tipo
“N” a “SMA” de 5m.
- Cable de Video tipo “BNC” de 3 m.
- Carga de 50 Ώ BNC. - Conector “T” BNC. - 2 Atenuadores de 30 dB. Personal Requerido:
- 2 Especialistas de Radar. Documentos: - Formato FO-RX-02 ASDE - Manual de Documentación
Técnica ASTRE 2000.
- Procedimiento P-08 - Procedimiento P11 - Procedimiento: P-14 - Procedimiento: P-16 - Procedimiento: C-1
Registros:
- Formato FO-RX-02 ASDE
- Manual de Documentación Técnica ASTRE 2000.
Estado del
servicio radar durante el mantenimiento:
- Operativo. Página 2 de 2
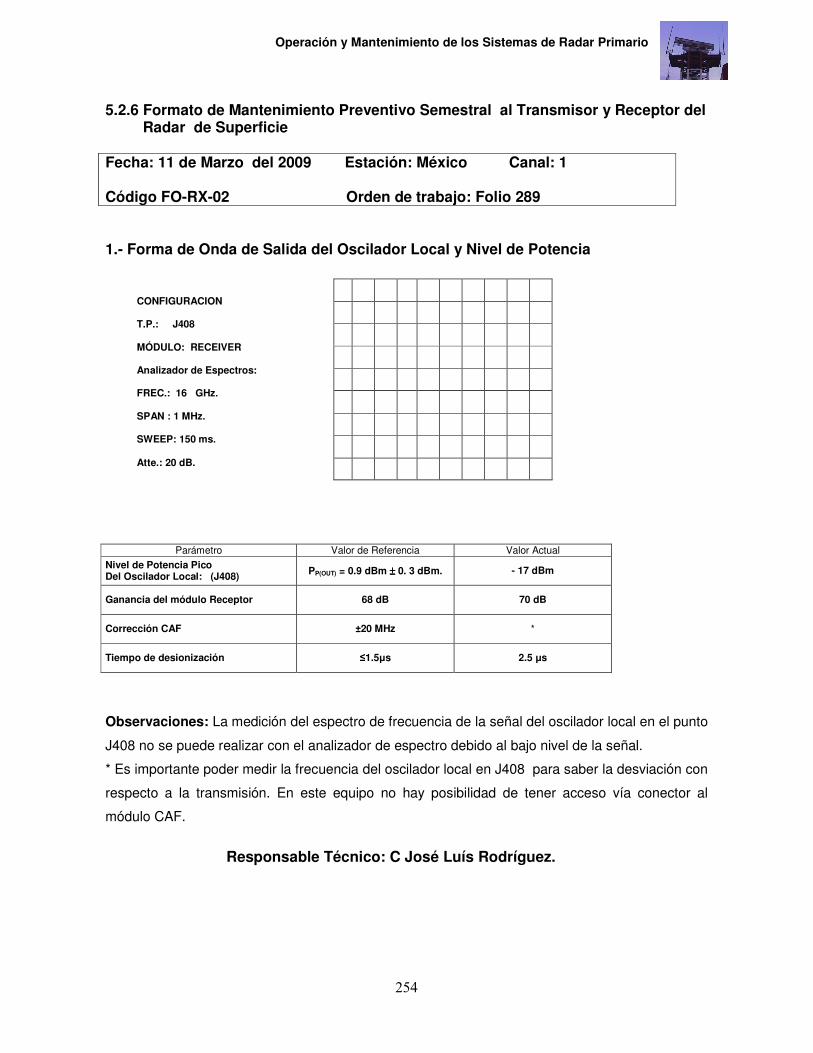
Operación y Mantenimiento de los Sistemas de Radar Primario
254
5.2.6 Formato de Mantenimiento Preventivo Semestral al Transmisor y Receptor del
Radar de Superficie Fecha: 11 de Marzo del 2009 Estación: México Canal: 1 Código FO-RX-02 Orden de trabajo: Folio 289
1.- Forma de Onda de Salida del Oscilador Local y Nivel de Potencia
Parámetro Valor de Referencia Valor Actual
Nivel de Potencia Pico Del Oscilador Local: (J408) PP(OUT) = 0.9 dBm ±±±± 0. 3 dBm. - 17 dBm
Ganancia del módulo Receptor 68 dB 70 dB
Corrección CAF ±20 MHz *
Tiempo de desionización ≤1.5µs 2.5 µs
Observaciones: La medición del espectro de frecuencia de la señal del oscilador local en el punto
J408 no se puede realizar con el analizador de espectro debido al bajo nivel de la señal.
* Es importante poder medir la frecuencia del oscilador local en J408 para saber la desviación con
respecto a la transmisión. En este equipo no hay posibilidad de tener acceso vía conector al
módulo CAF.
Responsable Técnico: C José Luís Rodríguez.
CONFIGURACION T.P.: J408 MÓDULO: RECEIVER Analizador de Espectros: FREC.: 16 GHz. SPAN : 1 MHz. SWEEP: 150 ms. Atte.: 20 dB.

Operación y Mantenimiento de los Sistemas de Radar Primario
255
5.2.7 Resultados de la Aplicación de los Programas de Mantenimiento 1.- Del programa de verificación diaria y semanal podemos concluir que es importante establecer el control del estado operativo de cada uno de los equipos que conforman el sistema de radar primario, la verificación de la calidad de la detección de los blancos, el registro de las lecturas generales de parámetros y el estado de los indicadores de alarma de todas las partes que intervienen en el sistema. Ahora bien el estado operativo de un radar se verifica de la siguiente manera: el transmisor debe tener activada la radiación y no presentar ninguna alarma, en el caso de transmisores con válvulas se debe cumplir con un tiempo de calentamiento previo a poner en radiación al transmisor. El receptor debe tener activadas sus fuentes de alimentación y tener activadas los indicadores de STC, mapas y no presentar ninguna alarma. La antena debe tener activada la rotación y no presentar ninguna alarma. Por ultimo la pantalla indicadora debe presentar la detección de los blancos con una buena calidad, una buena probabilidad de detección y presentar una relación constante de falsas alarmas (CFAR). En el transmisor es donde se tiene una mayor cantidad de circuitos de prueba (BIT) que nos indican con una señal luminosa la presencia de una alarma, la cual se indica en el tablero de control del transmisor. Se tienen alarmas de sobre corriente (fuente de alta tensión, magnetrón, del circuito de protección y del regulador de carga), de fuente de alimentación (filamentos de magnetrón, filamentos de tiratrón y de medio voltaje), generales (ausencia de señal de sincronía, alta potencia directa y alta potencia reflejada), del gabinete (ventilación, sobre temperatura y flujo de aire al magnetrón) se tienen también alarmas de interruptores de seguridad y de interruptores de alimentación. En el receptor tenemos indicadores de alarma de: fuente de alimentación, control automático de ganancia (AGC) y control automático de frecuencia (CAF). El tablero de control del receptor nos tiene que indicar si existe alguna alarma en: transmisor, antena y receptor. En el procesador se señal, extractor de video en el caso del radar del peñon se cuenta con un equipo de diagnostico integrado (BITE), el cual mediante un código indica la tarjeta dañada. Existen sin embargo indicadores de alarma (BIT) tanto en procesadores de señal (radar de superficie ASDE) así como en la unidad de seguimiento (radar peñon). Para la antena se tienen indicadores de alarma para detectar problemas de: sobre corriente del motor, sobre corriente del motor del polarizador, bajo nivel de aceite y en algunos casos baja presión de aceite (radar de superficie). Así mismo es importante mantener el control de la temperatura del local donde se ubique el equipo y la calidad de la alimentación externa (comercial, generada e ininterrumpible). En caso de detectar algún problema debemos establecer el programa de mantenimiento correctivo con el objetivo de normalizar a la brevedad posible cualquier anomalía. El tipo de programa de mantenimiento dependerá de la infraestructura de mantenimiento con que cuente el radar primario ya que como observamos en el radar México, el transmisor cuenta con varios galvanómetros que nos permiten monitorear los parámetros más importantes del transmisor, además de varias señalizaciones ( BIT ) de alarma en el

Operación y Mantenimiento de los Sistemas de Radar Primario
256
transmisor, receptor y antena. El procesador y extractor de video cuentan con un equipo de prueba integrado (BITE) que permiten verificar continuamente las tarjetas digitales. En el radar de superficie ASDE se cuenta con una infraestructura de mantenimiento similar al radar México, pero dada su aplicación que es relativamente sencilla, no cuenta un equipo de prueba integrado (BITE) en el procesador de señal. Pero por otro lado el radar de superficie incorpora una unidad de control y monitoreo (RCMS) que nos permite visualizar de una manera grafica el estado operativo de los diferentes equipos que guarda y la estación radar y realizar labores de control local y remoto. 2.- Del programa de mantenimiento mensual del transmisor del radar primario, podemos destacar que es importante verificar los siguientes puntos: a) Lecturas Generales de parámetros del transmisor
b) Frecuencia nominal de transmisión. c) Potencia pico de transmisión. d) Ancho del pulso de transmisión. e) Espectro en frecuencia de la señal transmitida. f) Señal de sincronía (trigger). g) Fuentes de alimentación de medio y alto voltaje y si es el caso de
filamentos de la válvula moduladora y de la etapa de potencia. La verificación periódica de estos 7 parámetros es importante para garantizar el buen funcionamiento del transmisor radar y prever el cambio de las partes consumibles. En las lecturas generales se verifica típicamente la corriente de la etapa de potencia, así como el voltaje y corriente de la fuente de alimentación de la etapa de potencia del transmisor. También es común que se verifique el voltaje de filamentos en caso de utilización de válvulas de emisión termoiónica y la corriente de los circuitos de protección. La verificación de la frecuencia de transmisión es fundamental para garantizar una buena detección de blancos radar. Ya que muchas veces se transmite con otra frecuencia a la nominal, lo que ocasiona que los ecos de los blancos estén fuera del ancho de banda del receptor, lo que causa una baja probabilidad de detección. La cantidad de energía radiada al espacio depende de la potencia pico y del ancho de pulso transmitido. Por lo tanto la verificación periódica de estos dos parámetros nos garantiza tener una buena cobertura. Transmitir con una baja potencia disminuye el alcance máximo del radar, recordemos que: La revisión del espectro en frecuencia de la señal transmitida, nos proporciona información de cómo se distribuye la energía en el dominio de la frecuencia. Proporcionándonos información de la estabilidad y la distribución en frecuencia de la energía transmitida (relación de lóbulo principal a lóbulos secundarios) previendo con esto el envejecimiento de la válvula transmisora, ya que una válvula con más de 1 año de funcionamiento tiene por lo regular una relación de lóbulos de alrededor de 6 dB.
4pPR =

Operación y Mantenimiento de los Sistemas de Radar Primario
257
Se observa tanto en las mediciones realizadas el radar primario peñon como en el radar primario de superficie, que para poder realizar las mediciones anteriores es necesario que se cuente con una toma de prueba a nivel de radio frecuencia a través de un acoplador direccional y tomar en cuenta la atenuación correspondiente de este. Las actividades propuestas en este programa se pueden desarrollar adecuadamente en los dos sistemas de radar bajo prueba. 3.- Del programa de mantenimiento mensual al receptor radar observamos que es importante verificar los siguientes parámetros:
h) Voltajes de las fuentes de bajo voltaje. i) El valor del nivel de ruido térmico. j) El valor del nivel de la sensibilidad tangencial del receptor analógico. k) La presencia y el valor esperado de los blancos de prueba. l) La presencia y carga correcta de los mapas operativos.
La verificación de los 5 puntos anteriores nos permite tener bajo el control los parámetros de recepción, que nos permitirán mantener un buen alcance, una buena probabilidad de detección, y una baja probabilidad de falsas alarmas. De la aplicación desarrollada en el capitulo 5, podemos concluir que es necesario contar con un acceso al receptor radar a través del acoplador direccional a nivel de radio frecuencia (RF), en donde es importante tomar en cuenta el valor de atenuación de este punto de acceso al receptor, aquí podemos inyectar la señal de prueba y realizar la medición a la salida del receptor en los punto de prueba de la señal de video (salida del detector). También es posible la inyección la señal de prueba a la salida del duplexor (entrada al receptor) si se cuenta con acceso fácil a limitador coaxial o amplificador de bajo ruido o mezclador según sea el caso. El poder contar con la generación de blancos de prueba (TTG), nos permite mantener constantemente monitoreado el funcionamiento de toda la cadena de recepción, procesamiento de señal y extracción de video; como es el caso del radar peñon. El radar de superficie no cuenta con la generación de blancos de prueba, en este sistema solo se realiza la inyección de una señal de ruido blanco, para monitorear constantemente el factor de ruido y por lo tanto la sensibilidad de la cadena de recepción. La verificación de los mapas operativos del receptor y procesador nos permiten garantizar una relación constante de falsas alarmas (CFAR). Con respecto a este punto el cabe mencionar que la verificación de los diferentes mapas en equipo del radar peñon es muy accesible, cosa que no ocurre con el radar asde en el cual es un proceso mas elaborado a través del programa de Autocad. Las actividades propuestas en este programa se pueden desarrollar adecuadamente en los dos sistemas de radar bajo prueba. 4.- Del programa de mantenimiento mensual de la unidad de seguimiento observamos que es importante la verificación de los siguientes parámetros:
m) La verificación estadística de la señal de entrada y salida.
Operación y Mantenimiento de los Sistemas de Radar Primario
258
n) Tabla de los umbrales de seguimiento. o) La verificación de las pistas radar en pantalla.
Es importante verificar en la pantalla indicadora la calidad de la presentación de las pistas radar, verificando el símbolo, número asociado y velocidad. Si esta asociado a un radar secundario: código de identificación, altura, velocidad. Un factor que es importante verificar son los umbrales de seguimiento, para revisar después de cuantas vueltas de antena detectando un blanco se crea una pista radar y después de cuantas vueltas de ausencia de detección se pierde la pista radar. Ahora bien si se transmite la información de la unidad de seguimiento a un sitio remoto, se deberá verificar según el protocolo de transmisión de datos: las pistas radar, sincronía, norte y sector con un analizador de protocolos. 5.- Del programa de mantenimiento mensual de la pantalla indicadora es importante verificar:
p) Los voltajes de las fuentes de alimentación. q) La calidad de las diferentes señales que se visualizan en la pantalla
indicadora.
Ahora bien en muchas estaciones de radar primario, existen pantallas indicadoras tanto para la parte operativa como para la parte técnica, como es el caso de las estaciones de radar del peñon y asde. Si existe una pantalla integrada a la estación de radar, esta se convierte en una herramienta invaluable para el mantenimiento, por ejemplo en el caso del radar peñon se tiene una pantalla que permite visualizar la información de video cruda, video procesada, plots, pistas, información meteorológica, mapas y realizar mediciones de distancia y rumbo. En el caso de una pantalla asignada a la parte operativa. Esta no esta equipada con todas las entradas para las diversas señales generadas en el sistema de radar. Estas trabajan con las señales de salida del sistema, que pueden ser video procesado o pistas y con los mapas operativos. 6.- Del programa de mantenimiento semestral para el transmisor y receptor del radar primario es importante verificar los siguientes puntos:
r) Formas de onda del transmisor en el regulador y modulador. s) La potencia y frecuencia del los osciladores local y coherente. t) La ganancia y ancho de banda del receptor analógico. u) El amarre en fase del oscilador coherente. v) El ajuste del control automático de frecuencia (AFC) y ganancia (AGC). w) El funcionamiento de las diferentes coberturas de recepción.
En este programa se realizan mediciones más específicas, tanto en transmisor como en receptor. Por ejemplo en el transmisor se realizan mediciones del regulador de carga monitoreando el umbral de referencia, la señal de disparo, la corriente del regulador y la señal de la red formadora de pulsos. En el modulador se verifica la señal de la válvula moduladora y las fuentes de medio y alto voltaje.

Operación y Mantenimiento de los Sistemas de Radar Primario
259
La implementación de este tipo de programa de mantenimiento, depende de las facilidades de mantenimiento que proporcione el fabricante. Por ejemplo el transmisor del radar peñon que es de 500 KW de potencia pico nominal, si cuenta con estos puntos de monitoreo. Sin embargo el radar de superficie que es de 35 KW de potencia pico, no cuenta con estas facilidades. Sin embargo con experiencia y tomando las precauciones necesarias, se pueden sacar determinadas referencias como pueden ser:
- La señal de carga de la red formadora de pulsos (PFN). - La señal de la sobre corriente de la fuente de alta tensión y etapa de potencia. - El ancho del pulso de transmisión.
Ahora bien la verificación de la frecuencia y potencia del oscilador local, garantiza tener una señal de frecuencia intermedia con una amplitud y forma adecuada. La verificación de la frecuencia y potencia del oscilador coherente garantiza obtener una señal de video con una amplitud y forma adecuada. La verificación del amarre de fase del oscilador coherente nos garantiza tener una buena eliminación de ecos fijos en sistemas de exploración aérea. El tener la ganancia y ancho de banda dentro de valores establecidos, nos proporciona una sensibilidad adecuada en el receptor para poder detectar blancos pequeños o lejanos. El buen funcionamiento del control automático de frecuencia (CAF), corrige las variaciones de frecuencia de la válvula transmisora (magnetrón), que es muy inestable en frecuencia. El circuito CAF detecta cualquier desviación de frecuencia del magnetrón y corrige según el sistema, ya sea la frecuencia del magnetrón o la del oscilador local, tenemos por ejemplo: En el radar del peñon se corrige la frecuencia del magnetrón (que utiliza un magnetrón sintonizable) y en el radar de superficie se corrige la frecuencia del oscilador local, en ambos caso se mantiene una diferencia constante entre las frecuencias de transmisión y la del oscilador local, logrando con esto que las respuestas de los blancos, se ubiquen dentro del ancho de banda establecido, mejorando la probabilidad de detección. Un problema clásico de una falla del circuito CAF, es tener una detección muy pobre de los blancos a una distancia de medio y largo alcance. Por ultimo tenemos una medición que nos garantiza el tener una buena detección en las primeras millas del alcance radar. La medición del tiempo des ionización, verifica que el duplexor conmute lo más rápido posible a la vía de recepción una vez terminado la fase de transmisión. El duplexor utiliza un tubo T/R que es del tipo consumible, el cual con el tiempo de uso tiende aumentar el tiempo de des ionización. Por lo cual se tiene que medir periódicamente este parámetro para prever su remplazo y así poder garantizar la detección de blancos en la zona cercana a la estación radar.

Operación y Mantenimiento de los Sistemas de Radar Primario
260
El modelo propuesto en este programa se adapta perfectamente al radar peñon dadas las facilidades para el mantenimiento. En el caso del radar de superficie la mayoría de las actividades se pueden desarrollar, sin embargo algunas actividades no se pueden realizar como por ejemplo la prueba de CAF. 7.- Del programa de mantenimiento semestral de la antena del radar primario es importante verificar los siguientes puntos: x) La inspección visual y mecánica de la antena y sistema de arrastre. y) La verificación eléctrica y mecánica de la junta rotativa, polarizador y
control de la antena. La verificación semestral de la condición física del reflector, líneas de transmisión, conectores y cables es importante, debido a que están a la intemperie y en muchos casos en ambientes de alta salinidad. Por otro lado se tiene que mantener un control mecánico estricto del sistema de arrastre con el objetivo de detectar ruidos, sobre temperatura y desgaste de los rodamientos. La prueba de atenuación de la junta rotativa nos verifica como se esta realizando la transferencia de energía de la parte fija a la parte móvil, son típicos valores de 1 a 1.5 dB de atenuación. En caso de tener alta atenuación se debe proceder al mantenimiento correctivo o cambio de la junta rotativa. La prueba mecánica y eléctrica del polarizador de antena, también debe realizarse con el objetivo de detectar suciedad, vibración y principalmente la posición del polarizador con respecto a la polarización seleccionada. Con el objetivo de que la señal de (RF) pase por la posición adecuada del polarizador según a la polarización seleccionada. Por ultimo la verificación de la orientación de la señal de referencia en acimut generada en los codificadores de posición. Para lo cual se recomienda contar con una señal de referencia fija, la cual puede ser proporcionada por un respondedor (transponder) equipo del radar secundario localizado en una estación remota o un objeto reflejante, conociendo la posición en distancia y acimut de la señal de referencia con respecto al radar, podemos orientar la señal de referencia proporcionada por el codificador para que la información obtenida en la pantalla monitora coincida en acimut con la posición del eje de la antena. Este programa propuesto para la antena de radar se adapta perfectamente a ambos sistemas, con algunas observaciones ya que sistema de arrastre del radar de superficie cuenta con un sistema de inyectores para la lubricación del engrane principal, también el radar de superficie cuenta con radomo que cubre la antena lo cual disminuye notablemente el daño de conectores y cables. 8.- De los programas de mantenimiento anuales de la unidad de seguimiento, así como de la unidad de visualización, se concluye que como los dos equipos están desarrollados en función a una computadora básicamente, se deben realizar los siguientes puntos:
z) Correr los programas de diagnostico específicos. z1) Limpieza general de las tarjetas.

Operación y Mantenimiento de los Sistemas de Radar Primario
261
9.- Del programa de mantenimiento anual al transmisor del primario radar, básicamente se tiene que verificar: z2) Prueba y en su caso ajuste de las cadenas de seguridad con las que
cuenta el transmisor. Las cadenas de seguridad verifican los parámetros más críticos del transmisor que son:
- Sobre corriente de Magnetrón. - Sobre corriente del diodo de protección. - Sobre corriente del regulador. - Sobre Voltaje de la fuente de alta tensión. - Cadena de interruptores de seguridad.
El programa propuesto de mantenimiento anual al transmisor para ambos sistemas, se adapta de una mejor manera al transmisor del radar peñon que es de alta potencia. Para el transmisor del radar de superficie que es un transmisor de media potencia no se tienen tanto control solo se verifican los siguientes parámetros:
- Interruptores. - Filamentos de magnetrón. - Fuente de alto voltaje. - Sobre corriente de la fuente de alta tensión.
10.- Del programa de mantenimiento anual al receptor analógico, procesador de señal (P/S) y extractor de video. En este programa básicamente se verifican funciones y parámetros del procesador de señal y extractor de video. Esto debido a que en esta parte de receptor, se cuenta con más herramientas que permiten verificar automáticamente el funcionamiento del equipo. El equipo integrado de prueba (BITE) verifica constantemente el funcionamiento de todas las tarjetas que conforman el procesador de señal y el extractor de video. Por eso es importante realizar una prueba fuera de línea del BITE. En el procesador de señal y extractor de video se realizan los cálculos en forma digital que permiten generar las señales de control para los dispositivos analógicos como el STC y AGC. Por lo cual se requiere utilizar una interfase digital analógica, cuya salida debe estar adecuadamente calibrada. Por otro lado las señales obtenidas del receptor analógico deben ser convertidas a una forma digital para su procesamiento. Por lo cual se debe verificar el convertidor analógico digital (A/D). Ahora bien una de las partes más importantes del procesador de señal, son los mapas donde se almacena información sectorizada que es utilizada como umbrales de detección. Por lo cual se debe realizar una prueba de carga de información fuera de línea para verificar el funcionamiento adecuado de los mapas, por ultimo se debe verificar las señales de cronometría en amplitud y tiempo.

Operación y Mantenimiento de los Sistemas de Radar Primario
262
Este programa al aplicarlo a ambos sistemas de radar observamos que: El radar del peñon cuenta con una infraestructura más completa de mantenimiento, ya que cuenta con el equipo de prueba integrado (BITE), así como la generación del Plots de prueba que permiten una verificación en tiempo real del funcionamiento del receptor analógico, procesador de señal y extractor de video. El radar de superficie no cuenta con este tipo de facilidades, sin embargo se tiene la posibilidad de poder visualizar la señal de video y umbrales de detección en varios puntos del procesador de señal, lo que facilita la detección de algún problema. Con respecto los mapas utilizados en el procesador de señal, ambos sistemas cuentan con los procedimientos para la verificación y programación de varios tipos de mapas. La extracción de video (correlación en acimut) se realiza en el radar peñon a través de una computadora dedicada, la cual también genera las señales de cronometría y control. En el radar de superficie se realizan las diferentes funciones de un extractor de video como la correlación, la generación de las señales de cronometría y las funciones de control en tarjetas individuales. 11.- Calendario de Mantenimiento. Podemos concluir que el calendario de mantenimiento preventivo nos permite programar todos los mantenimientos preventivos a los diferentes equipos que conforman el sistema de radar primario. La orden de trabajo y el reporte técnico correspondiente nos permiten tener el control de todas las actividades realizadas por el personal técnico. Podemos concluir que el modelo de administración del mantenimiento y operación propuesto se puede implementar al radar terminal y al radar de superficie del aeropuerto de la Ciudad de México, realizado las adaptaciones necesarias sin mayor problema. Cabe mencionar que actualmente se esta implementando este modelo de trabajo en ambas estaciones, cosa que nos proporciona una gran satisfacción. 5.2.8.- Mediciones prácticas en los equipos de Radar Primario. Podemos concluir que para verificar cualquier transmisor de radar; es necesario utilizar como herramienta básica un osciloscopio, el cual nos permitirá analizar en el dominio del tiempo las diferentes señales presentes con el formato conocido de la figura 2.7 del capitulo 2. Así podemos verificar: anchos de pulso, PRT/PRF, amplitudes, voltajes de referencia etc. Cuando requerimos evaluar parámetros más sofisticados del transmisor como son: la potencia pico, la potencia promedio, el espectro en frecuencia, la frecuencia de transmisión. Se requiere contar con un instrumental más sofisticado como son: analizador de espectro, medidor de potencia y ondametro, el grado de control que tengamos sobre el transmisor de radar, va a depender de las facilidades con que cuente el equipo para poder desarrollar los programas de mantenimiento. Como vimos la propuesta de administración de mantenimiento para el transmisor, se adapto sin ningún problema a los tipos de radar dadas las facilidades de mantenimiento ofrecidas por los fabricantes. Ahora bien en lo que respecta al receptor radar la herramienta básica es: el osciloscopio; con este podemos evaluar todas las señales a partir de la frecuencia intermedia (FI) como

Operación y Mantenimiento de los Sistemas de Radar Primario
263
son ruido térmico, señal de clutter, señal del eco, relación señal a ruido, ganancia en voltaje, señal de control de STC, AGC. Cuando requerimos verificar a nivel de RF o parámetros más específicos del receptor, como son; la sensibilidad, factor de ruido, ancho de banda, potencia y frecuencia de los osciladores local y coherente. Se requiere contar con instrumental más sofisticado como son: analizador de espectro, generador de RF, voltímetro RMS y medidor de potencia. En relación al procesador de señal (P/S) las señales presentes en el mantienen el mismo formato de la figura 2.7 del capitulo 2, con lo cual el osciloscopio es la herramienta que necesita para poder evaluar las diferentes señales del P/S. Ahora bien si el fabricante ofrece facilidades de mantenimiento para evaluar los diferentes circuitos que se localizan en el P/S como son: Mapas, filtros FIR, circuito BITE, generación de blancos de prueba a través de una pantalla indicadora de mantenimiento, se puede realizar un mejor control. En muchos radares el control del transmisor, receptor, procesador de señal, extractor de video, unidad de seguimiento y unidad de visualización así como la generación de las señales de cronometría se realizan con computadoras dedicadas y/o generales. En este nivel de la cadena, el mantenimiento del la circuitería (hardware) se basa en el conocimiento de la estructura de un sistema de computo, y en lo referente al mantenimiento de los programas de aplicación (software) este se basa en tener programas de respaldo. En este nivel contar con un equipo de diagnostico integrado (BITE) es primordial, así como con los programas de diagnostico. El hecho que más computadoras con programas operativos de uso general como WINDOWS XP hace que se puedan contar con más programas de diagnostico. A nivel de salida del extractor y la unidad de seguimiento, la información de los blancos radar (plots y tracks) se generan con un protocolo de comunicaciones HDLC o BSC, para su envío a las unidades de explotación local y remota. Por lo cual la salida de estos equipos puede ser verificada con un analizador de protocolos.

Operación y Mantenimiento de los Sistemas de Radar Primario
264
CAPITULO 6. CONCLUSIONES Y PROSPECTIVA
6.1.- CONCLUSIONES El trabajo de tesis presentado ofrece una metodología para la operación y mantenimiento de los sistemas de radar primario, en función a la experiencia desarrollada en el campo del control de transito aéreo civil, y pretendemos que pueda ser seguida en cualquier campo de aplicación de los sistemas de radar primario en México. La problemática de adquirir un radar que cumpla con las expectativas que se desean, implica que se cuente con métodos que nos permitan su selección, abastecimiento, instalación, puesta en operación y aplicación del mantenimiento preventivo y correctivo. Basado en lo anterior se puede garantizar que la inversión sea recuperada a corto plazo, pero los beneficios se garanticen por largo tiempo. La experiencia nos indica que con el cumplimiento estricto de diversos programas, actividades y rutinas se ha logrado que el funcionamiento de los equipos de radar haya podido extenderse a casi el doble del periodo de tiempo que la fábrica ofrece en su soporte técnico. Contando para esto con un abastecimiento de refacciones adecuado, ya que los fabricantes tienen que garantizar que por lo menos en la siguiente década posterior a la adquisición de los sistemas electrónicos dedicados a la aeronáutica se pueda contar con los respaldos en partes de repuesto que permitan operar dentro de las normas originales de fabricación. Además de poder tener con el soporte técnico de los especialistas de fabrica. Los especialistas en el mantenimiento de los sistemas deben mantener en mente que dominar un sistema del grado de complejidad que presenta un radar no es cuestión de unos días o meses, sino de varios años al cabo de los cuales la tecnología electrónica habrá avanzado de manera verdaderamente vertiginosa y por lo tanto no solamente deberán estar en condiciones para la aplicación del mantenimiento del sistema instalado sino de igual manera mantenerse actualizados en las nuevas tecnologías a fin de que cuando las compañías propietarias de los sistemas decidan su reemplazo la atención de los mismos no sea bastante impactante. La capacitación que el personal técnico responsable del mantenimiento haya recibido del fabricante respecto al conocimiento técnico de la composición del sistema, es de vital importancia en el momento que se tienen que aplicar los programas los cuales se describen en un calendario de aplicación del mismo, y que si se cumplen de forma estricta, los técnicos pueden lograr la experiencia necesaria para que durante los primeros meses de aplicación se garantice el funcionamiento al 100% de confiabilidad. Ahora bien la metodología de operación y mantenimiento propuesta toma en cuenta: Los métodos actuales propuestos y las facilidades de mantenimiento ofrecidas por los fabricantes, la infraestructura con la que cuente el usuario y las políticas de operación existentes, así mismo de la experiencia desarrollada en campo a lo largo del tiempo en el mantenimiento de diferentes generaciones de radar.

Operación y Mantenimiento de los Sistemas de Radar Primario
265
Al desarrollar y aplicar la administración del mantenimiento y la operación de los sistemas de radar primario, podemos garantizar el buen funcionamiento de los sistemas de radar primario en un corto, mediano y largo plazo, optimizando los recursos humanos y materiales con que cuente la organización. De la propuesta generada en el capitulo 3, y su aplicación en el capitulo 5, podemos concluir lo siguiente: Esta propuesta facilita la administración de los recursos humanos y materiales utilizados en la prestación del servicio de radar. Con la aplicación de los programas, formatos y procedimientos de mantenimiento se facilita la aplicación del mantenimiento preventivo y correctivo. Con la metodología propuesta se organiza a través de los programas de mantenimiento las diferentes actividades necesarias para aplicar el mantenimiento preventivo a los diferentes equipos que conforman el sistema de radar primario. Los formatos de mantenimiento nos permiten registran en un documento el valor de los diferentes parámetros obtenido durante la ejecución de los programas. Ahora bien estos registros permiten tener un control de la aplicación del mantenimiento así como de poder planear las acciones de mantenimiento correctivo en caso de encontrar algún parámetro fuera de tolerancia. Los procedimientos de mantenimiento dirigen las acciones a seguir durante la evaluación de los parámetros de los diferentes equipos. De la aplicación en campo; observamos que en el radar de aproximación del aeropuerto de la ciudad de México, se organizo las diferentes actividades que ya se tenían, optimizando la aplicación del mantenimiento preventivo y correctivo. En el caso de radar de superficie del mismo aeropuerto, la propuesta sirvió para implementar en esta estación los programas, formatos, procedimientos y calendario de mantenimiento que no se tenían. Por lo anterior consideramos que cualquier estación de radar primario puede ser susceptible de aplicar la metodología propuesta ya sea en estaciones que cuenten con algún tipo de administración o en estaciones que no posean algún tipo de organización del mantenimiento.

Operación y Mantenimiento de los Sistemas de Radar Primario
266
6.2.- PROSPECTIVA Los sistemas de radar están cambiando continuamente con la evolución de la tecnología y es así que prevemos los siguientes cambios en los sistemas: 1.- Los transmisores de radar primario evolucionan a ser totalmente de estado sólido eliminándose el uso del magnetrón y de la válvula moduladora thytraton obteniendo las siguientes ventajas:
a) No tener que cambiar periódicamente las válvulas moduladora y transmisora, reduciendo notablemente los gastos de operación.
b) Reducir considerablemente la potencia y las variaciones de frecuencia en la señal de transmisión.
c) Al tener el transmisor de estado sólido se aumenta la confiabilidad y disponibilidad del mismo, evitando el tener los canales en redundancia.
d) Con la conmutación electrónica de la frecuencia del oscilador podemos transmitir dos frecuencias diferentes y poder tener la diversidad en frecuencia.
2.- En el receptor debido al uso de transmisores de estado sólido que utilizan anchos de pulsos muy grandes, para transmitir densidades de potencia equivalentes a las radiadas con los transmisores con magnetrón. Se incorporar la técnica de la compresión de pulsos para no perder la resolución en distancia. 3.- El procesador de señal será realizado, utilizando una técnica de filtros digitales (FIR) en función al microprocesador 836, aunque la tendencia a tener computadoras dedicadas tiende a desaparecer y se incorpora rápidamente la utilización de computadoras de uso general con los sistemas operativos WINDOWS XP, WINDOWS 2000 así como el LINUX 10, en donde se cargan las aplicaciones para realizar:
- La función de extracción de video. - La función de seguimiento (Tracking). - La función de grabación. - La función de reproducción. - La función de visualización
Operación y Mantenimiento de los Sistemas de Radar Primario
267
APENDICE A GLOSARIO DE TÉRMINOS UTILIZADOS EN LOS EQUIPOS DE RADAR PRIMARIO. 1.- Alcance máximo. Es la distancia máxima teórica que puede cubrir el radar.
2.- Alcance mínimo. Es la distancia mínima a la cual es posible detectar un blanco. Un pulso corto permite la detección de blancos muy cerca al sitio radar. Esto es porque un pulso corto aumenta la capacidad de resolución en rango, porque el tren de ondas moviéndose a la velocidad de la luz C ocupa un espacio igual a C X ττττ, por lo tanto dos blancos localizados a una distancia menor a C X ττττ/2 no son discriminados.
3.- Ancho de Banda.- Es el margen de frecuencias que se tiene que tener para poder reproducir los pulsos radar. 4.- Ancho del haz.- Es una medida de la directividad de la antena. 5.- Ancho del haz a 3 dB.- Es el ángulo entre puntos del patrón de radiación cuando la potencia del lóbulo principal a caído a la mitad (3 dB) del máximo de potencia. 6.- Ancho del Pulso ( ττττ ).- También llamado duración del pulso, es el intervalo de tiempo entre el filo de subida y el filo de bajada del pulso de transmisión, medido al 50% de la amplitud máxima. También es el tiempo que dura la transmisión de un pulso, se mide en micro segundos ( µ s). Este parámetro determina las siguientes características del radar, rango mínimo, rango máximo y resolución axial. 7.- Antena isotrópica.- Es una antena hipotética la cual radia energía de igual manera en todas direcciones. 8.- Apertura.- En una antena no direccional, la porción de la superficie plana la cual es perpendicular a la dirección de radiación máxima y a través de la cual la mayor parte de la energía pasa. 9.- Acimut.- Es el ángulo entre una referencia horizontal (usualmente el norte) y la dirección de interés, usualmente medido en el sentido horario. El termino acimut y rumbo a menudo son intercambiables. 10.- Blanco.- Cualquier objeto discreto el cual refleja energía al radar. 11.- Ciclo de trabajo (DC): Esta definido como la relación entre el ancho del pulso de transmisión (ττττ) y el periodo de repetición de pulsos. El ciclo de trabajo es un parámetro muy importante del radar, ya que es usado para determinar la potencia promedio después de la definición de la potencia pico.
2
.max
PRTCR =
2
.min
τCR =
PRTDC
τ=

Operación y Mantenimiento de los Sistemas de Radar Primario
268
12.- Circulador.- Es un acoplador multi terminal, en la cual la energía de microondas es acoplada en una determinada dirección. 13.- Clutter. Palabra utilizada para describir a los blancos no deseados en las diferentes utilizaciones de radar. Por ejemplo tierra, montañas, lluvia, insectos, estructuras, aves etc. 14.- Clutter de Tierra.- Eco de blancos provenientes de montañas, edificios, construcciones, colinas etc. 15.- Clutter de lluvia.- Señal no deseada proveniente de la lluvia. 16.- Clutter de Mar.- Señal proveniente de la superficie del mar. 17.- Coherente.- Mantener una relación de fase definida con respecto a cierta referencia. La fase de una señal coherente en cualquier punto, relativa a la señal de referencia es completamente predecible. 18.- Control Automático de Ganancia (AGC).- Es un dispositivo que reacciona ante las variaciones de nivel del ruido promedio a diferentes distancias. Con esto reducimos la saturación del receptor radar. 19.- Control de Sensibilidad en el Tiempo (STC).- También llamado ganancia de barrido, es la variación programada de la ganancia (sensibilidad) del receptor radar, como función del tiempo en cada intervalo de repetición de pulsos. Este circuito tiene el objetivo de evitar la saturación del receptor en distancias cercanas por ecos fuertes de blancos o clutter. 20.- Cuadratura.- Se dice que una señal esta en cuadratura con otra, cuando existe una diferencia de fase de 90o entre ambas. 21.- Detector Síncrono.- Un demodulador en el cual la señal de referencia tiene la misma frecuencia que la portadora que va a eliminar. 22.- Detector con umbral adaptativo.- Un sistema de detección por umbral en el cual el umbral cambia automáticamente para mantener una relación constante de falsas alarmas. 23.- Dinámica—Es la capacidad del receptor para adaptar sus características a las de las señales de entrada esto es; la capacidad para detectar ecos tan distintos como los que origina una montaña a corta distancia o un pequeño avión a varios centenares de millas; para conseguir esto, es necesario recurrir a procedimientos muy específicos de la técnica radar, tales como la programación de la ganancia con la distancia (STC) o amplificadores logarítmicos. 24.- Duplexor.- Es un dispositivo el cual automáticamente dirige la señal de transmisión desde el transmisor hacia la antena, y la señal recibida desde la antena es dirigida hacia el receptor, pero previene que la energía del transmisor se dirija hacia el receptor. Este dispositivo permite que el transmisor y la antena compartan la misma antena.

Operación y Mantenimiento de los Sistemas de Radar Primario
269
25.- Eco de segunda traza. Un eco el cual es recibido en un tiempo de retardo que excede a un intervalo de repetición (PRT), pero menor a dos intervalos de repetición. 26.- Ecuación Radar. Es una ecuación que nos permite determinar el alcance máximo teórico de un blanco en función a los parámetros propios del radar y del blanco.
Donde: P t = potencia transmitida en vatios.
G = ganancia de la antena.
A e = apertura efectiva de la antena en m2.
σ = superficie equivalente radar del blanco en m2.
S min = mínima señal discernible en vatios. 27.- Efecto doppler.- El cambio de frecuencia de una señal ocurre cuando la fuente y/o el observador están en un movimiento relativo, o cuando la señal es reflejada por un objeto móvil. Existe un aumento en la frecuencia si tanto la fuente y el observador (o el objeto reflejante) se aproximan, existe una disminución de la frecuencia si ellos se separan. 28.- Elevación. .- Es la orientación del patrón de radiación de una antena en el plano vertical. 29.- Espectro en Frecuencia.- Es la composición en frecuencia de los pulsos transmitidos en un radar modulado por pulsos.
4
1
min
max)4(
•••=
S
AGPR et
π
σ

Operación y Mantenimiento de los Sistemas de Radar Primario
270
30.- Factor de mejoramiento MTI.- Es la relación señal a clutter a la salida del sistema MTI dividida entre la relación señal a clutter a la entrada, promediada uniformemente a lo largo de las velocidades radiales de los blancos de interés:
I= (So/Co)/(So/C0)
30.- Factor de Ruido (cifra de ruido).- La cifra de ruido es una medida de la degradación que sufre la relación señal-ruido a su paso por el receptor radar.
31.- Falsa Alarma.- Una detección del radar errónea causada por ruido térmico u otras señales de interferencia que exceden el umbral de detección. 32.- FAN.- Normalización de falsas alarmas. La cual utiliza una información dinámica residente en una memoria conocida como mapa. 33.- Fase Ciega.- Es un fenómeno que ocurre en el eliminador de ecos fijos (MTI) en el cual las fases de dos sucesivos ecos de un blanco móvil son tal dos pulsos sucesivos de la señal de video tiene la misma amplitud y por lo tanto son cancelados por el circuito MTI. El resultado es la disminución de la sensibilidad del receptor. 34.- Filtro adaptado.- Un filtro que es adaptado a la señal de entrada y maximiza la relación de salida de potencia de señal a potencia de ruido. 35.- Frecuencia Portadora (Ft).- Es la señal generada por el transmisor, cuya frecuencia depende de la banda a la que este asignado el radar. 36.- Frecuencia de repetición de pulsos (PRF).- Es la razón a la cual los pulsos de RF son generados. 37.- Frecuencia de repetición de pulsos variable.- Se le conoce como STAGGER y es un PRF el cual cambia su valor a intervalos regulares puede tener dos o más valores. El PRF puede variar de pulso a pulso o de vuelta a vuelta de antena. 38.- Frecuencia de transmisión (Ft): es la frecuencia de la onda electromagnética transmitida y la longitud de onda es λ= C/Ft. Este parámetro afecta al alcance máximo radar, las dimensiones de la antena, afecta así mismo a la reflexión, la atenuación y la súper refracción de las ondas electromagnéticas.

Operación y Mantenimiento de los Sistemas de Radar Primario
271
39.- Ganancia—Es el aumento o amplificación que experimenta la señal eco antes de su entrega a la unidad de explotación de la información; la amplificación se puede llevar a cabo en radio frecuencia, frecuencia intermedia y videofrecuencia y ha de ser tal que la amplitud de la señal de vídeo entregada a la unidad indicadora sea del orden de decenas de voltios. 40.- Ganancia de Potencia.- Es la relación de la intensidad de radiación de una antena en una determinada dirección a la intensidad de radiación que podría ser obtenida por una antena isotropica. La ganancia también es igual a la directividad (GD) multiplicada por el factor de eficiencia. Este toma en cuenta las perdidas de disipación de la antena, pero no las perdidas debidas a desadaptación de impedancia. 41.- Ganancia directiva (directividad) GD.- Es una medición del grado de concentración en una determinada dirección. Esta no toma en cuenta las perdidas en la antena. La directividad esta definida como (intensidad de radiación máxima) / (intensidad de radiación promedio. 42.- Impactos al blanco. Los impactos al blanco están definidos como el número de emisiones de un radar dentro del tiempo de iluminación del blanco. Este parámetro esta ligado a la definición de velocidad de rotación y es directamente proporcional a el PRF y a el ancho de haz de la antena (θ) e inversamente proporcional a la velocidad de rotación de la antena. 43.- Indicador de blancos móviles (MTI).- Es un dispositivo utilizado en el radar primario para rechazar los blancos fijos y dejar pasar los blancos móviles. Su funcionamiento esta basado en el efecto doopler. 44.- Indicador de Radar.- Una pantalla de radar en la cual los blancos aparecen como destellos luminosos en la pantalla en una presentación en dos dimensiones. Los tipos de indicadores más comunes en los sistemas de radar son: Tipo A.- En este tipo de indicador el spot de barrido mantiene una intensidad constante, comenzando en el instante de la transmisión del radar. La recepción de un blanco provoca una deflexión vertical del spot, aproximada a la fuerza de la señal recibida. La distancia horizontal que es el tiempo transcurrido entre el pulso transmitido y la recepción del eco, representa la distancia del blanco. Este tipo de indicador es utilizado para determinar distancias, un ejemplo de este tipo de indicador es el osciloscopio. Tipo B.- En este tipo de indicador se representa el rumbo o dirección, y la distancia de los blancos en una representación de ordenada y abscisa. Cuando un eco es recibido; la señal causa un spot brillante, cuya altura sobre la línea de base nos indica el rango o distancia del blanco, la posición del spot a la derecha o izquierda de la línea central de la pantalla indica el acimut del blanco.
Vr
PRF
*6
*θ=

Operación y Mantenimiento de los Sistemas de Radar Primario
272
Tipo de posición en planta (PPI).- El indicador PPI es otro tipo de exploración para presentar información en rango y acimut. Cada vez que un pulso es transmitido, el spot sin intensificación se mueve desde el centro hacia el borde exterior en forma de una línea radial, una vez alcanzado el borde exterior regresa al origen y comienza otra barrido tan pronto como se transmite el siguiente pulso. La traza gira alrededor de la pantalla, indicando la posición de la antena. 45.- Integración.- Es la suma conjunta de varios pulsos provenientes de un mismo blanco (número de impactos al blanco), esta normalmente se realiza antes de decidir si la señal del blanco esta presente. Esto mejora considerablemente la exactitud de la decisión. Esta se puede realizar antes o después del detector. 46.- Integración Coherente.- Integración en la cual se requiere que la fase de los pulsos sucesivos sea conocida. 47.- Lóbulos laterales.- Son lóbulos diferentes al principal, y son producidos por imperfecciones de la antena. Estos lóbulos causan perdida de energía y en algunos casos causan posicionamientos equivocados de los blancos, además de interferencia. 48.- Longitud de onda (λ). L a longitud de onda afecta la propagación de las ondas radar. La propagación de las ondas radar está afectada por la superficie de la tierra y por su atmósfera. 49.- Longitud de pulso. Es la distancia entre el filo de subida y el filo de bajada de los pulsos radiados, cuando estos viajan a través del espacio. La longitud de pulso es igual al ancho del pulso (duración) por la velocidad de la luz (C). 50.- MTI de Procesamiento de Fase.- Un tipo de indicador de blancos móviles en el cual el cambio de amplitud de pulsos a pulso a la salida del detector de fase en el receptor coherente es utilizado para diferenciar el clutter fijo de los blancos móviles. 51.- MTI con procesamiento vector.- Es un tipo de indicador de blancos móviles en el cual se combinan las componentes en fase y en cuadratura de la señales de los ecos radar en un detector de magnitud con el objetivo de eliminar las fases ciegas. 52.- Oscilador Coherente (COHO).- Un oscilador que suministra una fase de referencia, mediante la cual cualquier cambio en la fase de la señal de RF recibida puede ser reconocida. Este oscilador opera normalmente a nivel FI. 53.- Oscilador Local Estable (STALO).- Un oscilador altamente estabilizado utilizado para ser mezclado con la señal de recepción de RF y así obtener la señal de FI. 54.- Patrón de radiación.- Es una grafica en tres dimensiones del la distribución del campo de radiación lejano en función de la dirección. El patrón de radiación esta a menudo dado como una grafica de dos dimensiones representando la potencia de radiación en un plano (horizontal y vertical) contra el ángulo del eje de la antena.
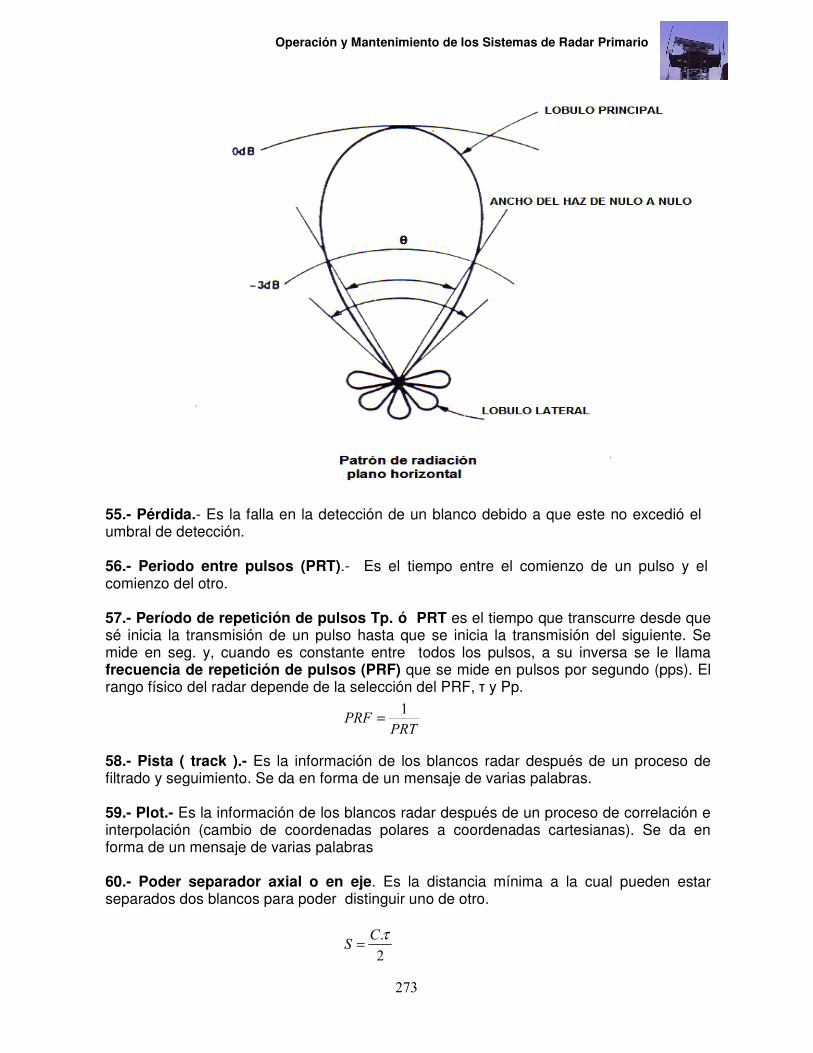
Operación y Mantenimiento de los Sistemas de Radar Primario
273
55.- Pérdida.- Es la falla en la detección de un blanco debido a que este no excedió el umbral de detección. 56.- Periodo entre pulsos (PRT).- Es el tiempo entre el comienzo de un pulso y el comienzo del otro. 57.- Período de repetición de pulsos Tp. ó PRT es el tiempo que transcurre desde que sé inicia la transmisión de un pulso hasta que se inicia la transmisión del siguiente. Se mide en seg. y, cuando es constante entre todos los pulsos, a su inversa se le llama frecuencia de repetición de pulsos (PRF) que se mide en pulsos por segundo (pps). El rango físico del radar depende de la selección del PRF, τ y Pp.
58.- Pista ( track ).- Es la información de los blancos radar después de un proceso de filtrado y seguimiento. Se da en forma de un mensaje de varias palabras. 59.- Plot.- Es la información de los blancos radar después de un proceso de correlación e interpolación (cambio de coordenadas polares a coordenadas cartesianas). Se da en forma de un mensaje de varias palabras 60.- Poder separador axial o en eje. Es la distancia mínima a la cual pueden estar separados dos blancos para poder distinguir uno de otro.
PRTPRF
1=
2
.τCS =

Operación y Mantenimiento de los Sistemas de Radar Primario
274
61.- Polarización.- Es la orientación de los campos de las ondas electromagnéticas por convención, la polarización es tomada por la dirección del campo eléctrico. 62.- Potencia Pico (Pp).- Es el nivel máximo de energía promedio de un pulso de transmisión. La potencia producida durante el pulso recibe el nombre de potencia pico, aclarando que no es la máxima potencia instantánea de la señal sinusoidal. Usualmente la potencia pico es la mitad de la potencia máxima instantánea. 63.- Potencia Promedio (PAVG).- Es el nivel máximo de energía promedio a lo largo de toda la recurrencia radar. La potencia promedio es la energía del pulso dividida entre el periodo de repetición.
64.- Probabilidad.- Es una medida de la posibilidad de ocurrir un evento. La probabilidad de un evento esta definida como la relación entre las oportunidades favorables y las oportunidades desfavorables. Entre mas posible sea un evento mayor es su probabilidad. 65.- Probabilidad de detección (Pd).- La probabilidad de que una señal que esta presente sea detectada, esta señal puede ser de eco mas ruido o ruido solo. 66.- Probabilidad de Falsas Alarmas (Pfa).- La probabilidad de que el ruido solo sea detectado erróneamente como un blanco. 67.- Radar.- Es un sistema de microondas para detectar objetos y determinar su distancia y dirección. La palabra radar es un acrónimo de las palabras anglosajonas Radio Detección and Ranging. 68.- Radar Coherente.- Es un equipo de radar en el cual la fase de la señal transmitida es conservada y es utilizada en la recepción para la de modulación. 69.- Rango Dinámico.- La diferencia en decibeles entre el nivel de saturación y el nivel mínimo aceptado en el sistema o transductor. 70.- Receptor coherente.- Es un receptor el cual detecta tanto la amplitud y la fase de la señal recibida. 71.- Receptor Homodino.- También llamado receptor (DC-FI) es un receptor en el cual la señal recibida es trasladada directamente a banda base (cd) sin pasar a través de una frecuencia intermedia (comparada con el receptor superheterodino). 72.- Receptor superheterodino.- Es un receptor en el cual la señal recibida es mezclada con una señal de referencia (oscilador local) resultando una frecuencia más baja llamada frecuencia intermedia, la cual posteriormente es amplificada en un amplificador de frecuencia intermedia (FI). 73.- Rechazo de clutter (CR).- Es la razón de la potencia de clutter a la entrada y salida del cancelador CR= Ci/Co.
PRTPpPavg
τ=

Operación y Mantenimiento de los Sistemas de Radar Primario
275
74.- Residuo de clutter.- Son los residuos a la salida del MTI. Son producto de varios componentes (no correlacionados) resultantes de inestabilidades del radar, exploración de la antena, movimiento relativo y fluctuación de clutter y fluctuaciones de la reflectividad del clutter. 75.- Receptor radar con característica logarítmica y con constante de tiempo rápida (LOG-FTC).- Un receptor que tiene una característica de entrada salida del tipo logarítmica seguida por un circuito de constante de tiempo rápida (circuito diferenciador o filtro pasa alto). 76.- Recurrencia Radar.- Esta compuesta por dos fases bien definidas para un radar modulado por pulsos. Estas fases son la de transmisión (τ) y la de recepción, su duración es de un PRT y su frecuencia de repetición es el valor del PRF. 77.- Reflector parabólico.- Es un tipo de antena direccional utilizada en los equipos de Radar, la cual usa un reflector de forma parabólico. Cualquier rayo enviado desde el elemento radiador (corneta) es reflejado en forma paralela al eje de la corneta. La distancia viajada por todas las ondas es la misma resultando un frente de onda plano.
78.- Relación Constante de Falsas Alarmas ( CFAR ).- Una propiedad del sistema para controlar el umbral y/o la ganancia de los dispositivos utilizados en el radar con el objetivo de suprimir las falsas alarmas causadas por el ruido térmico, clutter o interferencias electrónicas de varios niveles.
Operación y Mantenimiento de los Sistemas de Radar Primario
276
79.- Relación de falsas alarmas (FAR).- Es el número de falsa alarmas por unidad de tiempo. 80.- Relación de onda estacionaria ( ROE ).- Relación de las amplitudes máxima y mínima de la tensión en un determinado punto de una línea de transmisión. 81.- Resolución en distancia.- Es la habilidad de poder distinguir blancos situados en la misma línea de vista. 82.- Ruido Térmico.- Energía electromagnética no deseada de amplitud y frecuencia aleatoria la cual interfiere con la detección de los blancos. 83.- Rumbo (bearing).- Es la dirección horizontal entre una línea ubicada en un punto terrestre (radar) y un blanco expresado como un ángulo en el plano horizontal desde una dirección de referencia. 84.- Scan.- Es la exploración de un determinado volumen de espacio efectuada por la antena del radar. La exploración puede ser de 360o para un radar de control de tráfico aéreo, de 120o para un radar meteorológico de avión etc. 84.- Sección transversal radar (σ).- Es la medición del tamaño del blanco visto por el radar. Esta determina la cantidad de energía incidente del radar que es interceptada por el blanco y reflejada hacia la antena. 85.- Señal de frecuencia intermedia (FI).- Señal obtenida del batimiento de la señal de RF con una señal de referencia llamada oscilador local. Normalmente el valor de la FI es de mucho menor valor que la RF. Los valores nominales para los diversos equipos de radar son 30 MHz, 60 MHz, y 150 MHz. 86.- Señal de radio frecuencia (RF).- Señal de muy alta frecuencia y potencia generada por el transmisor radar la cual viaja a través del espacio y es reflejada a muy baja potencia. 87.- Sensibilidad.- Es la capacidad de detectar blancos en presencia de ruidos; la medida de esa capacidad viene dada por la mínima señal discernidle (MDS), esto es, la mínima amplitud de señal eco que puede ser identificada como tal en presencia de ruido. 88.- Sweep.- Es el barrido producido en la pantalla indicadora de radar. El inicio del barrido lo da la señal sincronía y su fin el alcance programado. 89.- Tiempo de falsa alarma (Tfa). Es el tiempo promedio entre falsas alarmas Tfa=1/FAR 90.- Tiempo de transito de ida y vuelta.- Es el tiempo transcurrido entre la transmisión de un pulso y la recepción del eco de un blanco particular 91.- Velocidad de rotación de la antena. La selección de la velocidad de la antena en revoluciones por minuto (RPM), es afectada por dos factores, los cuales son contrastantes entre ellos. El primero de esos factores consiste de tener una actualización de datos de la posición de los blancos, por lo tanto esto sugiere tener una selección de
2
.τCS =

Operación y Mantenimiento de los Sistemas de Radar Primario
277
alta velocidad (revoluciones por minuto) de la antena. El segundo de esos factores consiste en tener una alta probabilidad de detección por lo que debemos de tener a un PRF constante un tiempo de iluminación del blanco grande, esto implica seleccionar una baja velocidad de la antena. En la practica la selección del valor optimo de la velocidad de la antena en RPM, resulta del compromiso entre dos factores, en la practica un tiempo de iluminación que nos proporcione 15 ecos del blanco es bueno. 92.- Velocidad Ciega.- Es una velocidad radial de un blanco con respecto al radar para la cual la respuesta del MTI tiene una salida aproximadamente cero. En un sistema MTI coherente usando un PRF constante, una velocidad radial a la cual el blanco cambia su distancia por ½ longitud de onda o múltiplos. 93.- Visibilidad bajo clutter (SCV).- Es la relación máxima de potencia de clutter (coincidiendo con un blanco) con la potencia del eco de un blanco, la cual permite al blanco ser detectado con una determina probabilidad de detección y falsas alarmas. 94.- Umbral de Detección.- La detección automática de blancos es realizada por la implementación de un nivel de referencia, el cual cuando es rebasado se presume la presencia de un blanco.

Operación y Mantenimiento de los Sistemas de Radar Primario
278
APENDICE B
ESPECIFICACIONES TECNICAS DEL SISTEMA DE RADAR PRIMARIO.
Especificaciones Técnicas. El fabricante proporcionara las especificaciones técnicas con el objetivo de conocer las características y los valores de referencia del Sistema de Radar. Dentro de los parámetros característicos para una estación de radar terminal tenemos:
Antena
Frecuencia de operación: 2700 – 2900 MHz
Polarización: lineal y circular (conmutable)
Angulo de inclinación: -2o a +8o (ajustable manualmente)
ROE: < 1.2 (típico)
Ancho del haz horizontal medido a 3 dB: 1.45o
Ancho del haz vertical medido a 3 dB: 5o
Ganancia: 33.5 dB (típico)
Base de la antena
Velocidad de giro: 15 rpm
- Junta Rotativa:
ROE; ≤ 1.2
Perdida por inserción; 1.2 dB
Potencia pico; 500 kW
Potencia Promedio; 6 kW
- Recopia de giro de antena:
Tipo de codificador; óptico 12 bits.
Parte de Radio Frecuencia (RF)
- Perdidas de inserción en transmisión:
Diplexor; 0.4 dB
Duplexor. 0.6 dB
Guías de onda y cables. 0.2 dB
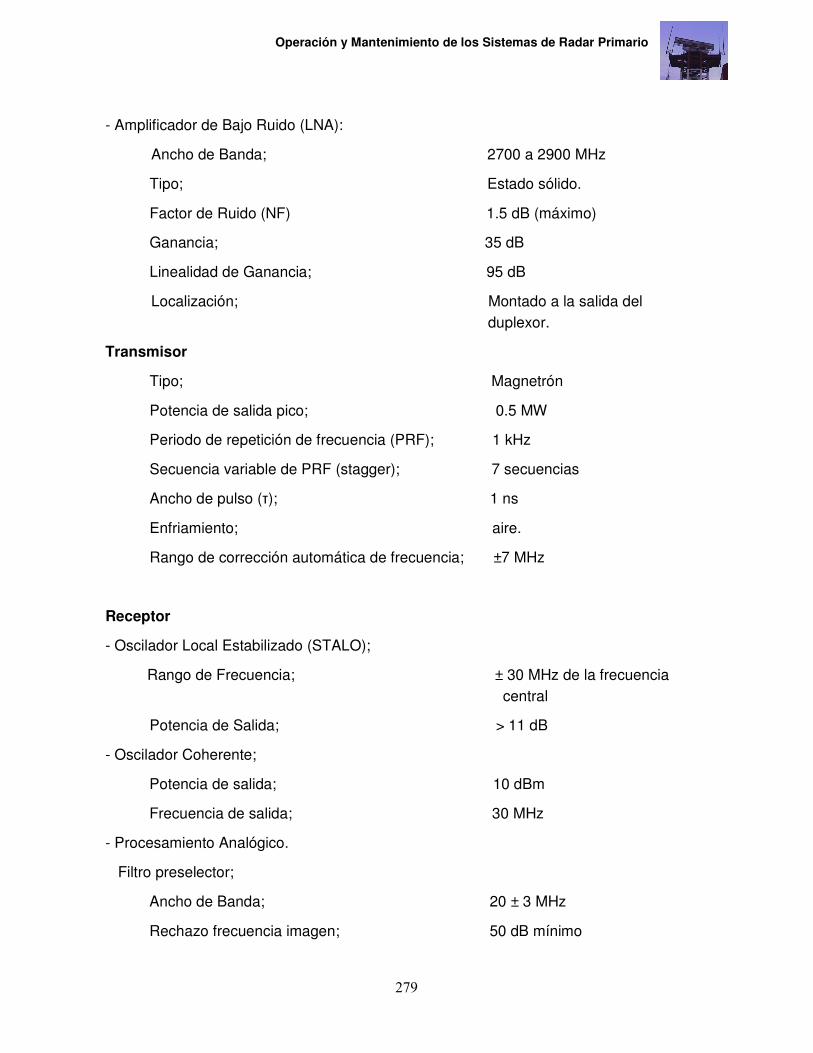
Operación y Mantenimiento de los Sistemas de Radar Primario
279
- Amplificador de Bajo Ruido (LNA):
Ancho de Banda; 2700 a 2900 MHz
Tipo; Estado sólido.
Factor de Ruido (NF) 1.5 dB (máximo)
Ganancia; 35 dB
Linealidad de Ganancia; 95 dB
Localización; Montado a la salida del duplexor.
Transmisor
Tipo; Magnetrón
Potencia de salida pico; 0.5 MW
Periodo de repetición de frecuencia (PRF); 1 kHz
Secuencia variable de PRF (stagger); 7 secuencias
Ancho de pulso (τ); 1 ns
Enfriamiento; aire.
Rango de corrección automática de frecuencia; ±7 MHz
Receptor
- Oscilador Local Estabilizado (STALO);
Rango de Frecuencia; ± 30 MHz de la frecuencia central
Potencia de Salida; > 11 dB
- Oscilador Coherente;
Potencia de salida; 10 dBm
Frecuencia de salida; 30 MHz
- Procesamiento Analógico.
Filtro preselector;
Ancho de Banda; 20 ± 3 MHz
Rechazo frecuencia imagen; 50 dB mínimo

Operación y Mantenimiento de los Sistemas de Radar Primario
280
- Preamplificador de Frecuencia Intermedia;
Ganancia; 20 dB
Ancho de Banda; 40 MHz
Frecuencia; 30 ± 0.5 MHz
- Amplificador de Frecuencia Intermedia;
Ganancia; 30 dB
Ancho de Banda; 4 MHz
- Control de sensibilidad en el tiempo y Control Automático de Ganancia (AGC);
Ganancia; 3 dB
Ancho de Banda; 30 MHz
- Detector Amplitud Fase;
Nivel de entrada; 4 dBm
Nivel de Salida; 17.8 dB (75 ohm)
Ancho de Banda; 0.7 MHz
Ganancia; 13.8 dB
Salida con Cuadratura de Fase. 90o
Convertidor Analógico Digital
Número de Bits; 12
Impedancia de entrada; 75 ohm
Reloj.
Muestreo; 1.5 por pulso
Procesador de Señal
- Tipo de procesador;
Número de Filtros; 8
Adaptividad de Filtros; 4 grupos
- Mapas Estáticos; 5 mapas
- Mapas Dinámicos; 3 mapas
- Control automático de Ganancia (AGC); ± 4 dB

Operación y Mantenimiento de los Sistemas de Radar Primario
281
Extractor de Video
Tipo; Computadora dedicada.
Velocidad; 5 Mega instrucciones por segundo.
Longitud de palabra (instrucción y datos); 24 bits
Extracción de plots. Basado en el análisis de rango, acimut, amplitud y frecuencia doopler de cada reporte de blanco.
Quantum de distancia; 1/64 MN
Quantum de orientación; 0.088o
Equipo de prueba integrado; En línea.
Transmisión de datos; Banda estrecha 9600 baudios.
Fuente de alimentación
Línea principal; 3 fases y neutro
Voltaje de entrada; 220 ± 10% Voltios
Frecuencia; 60 Hz

Operación y Mantenimiento de los Sistemas de Radar Primario
282
APENDICE C
DIAGRAMAS A BLOQUES

Operación y Mantenimiento de los Sistemas de Radar Primario
283

Operación y Mantenimiento de los Sistemas de Radar Primario
284

Operación y Mantenimiento de los Sistemas de Radar Primario
285

Operación y Mantenimiento de los Sistemas de Radar Primario
286

Operación y Mantenimiento de los Sistemas de Radar Primario
287

Operación y Mantenimiento de los Sistemas de Radar Primario
288

Operación y Mantenimiento de los Sistemas de Radar Primario
289

Operación y Mantenimiento de los Sistemas de Radar Primario
290
BIBLIOGRAFIA Skolnik, M (1980). Introducion to Radar System. New York : McGraw-Hill Book Co. Stimson, George W. (1983). Introduccion to Airborne Radar, Hughes Aircraft
Company. New York: Scitech Publishing, Inc. By Staff Technical. (1977). Technical Manual ATCR-33 Civil Radar and System
Division Selenia Company Italy. By Staff Technical (1990). Technical Manual ATCR-33 M Radar and System
Division Selenia Company Italy. By Staff Technical (1999). Technical Manual ATCR- 33S Radar and System
Division Alenia-Marconi Company Italy. By Staff Technical (2000). Technical Documentation Astre 2000 Radar Thales
Company France. Fundamentos de Radar Escuela Naval Militar España. Ing. Daniel Aguirre D. (1979). Curso Básico de Técnica Radar. México: SENEAM –
SCT By Staff Technical (1993). Principles of Radar Systems Lab-Volt Québec Canada. By Staff Technical (1978). Basic of Modern Radar Techniques by Selenia.
Related Documents











