0 MT MT MT MT-SUP SUP SUP SUP-XXX XXX XXX XXX REV00 REV00 REV00 REV00 M M A A N N U U A A L L D D E E L L A A A A S S I I G G N N A A T T U U R R A A CONTROL DIGITAL INGENIERÍA MECATRÓNICA MECATRÓNICA

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

0
MTMTMTMT----SUPSUPSUPSUP----XXXXXXXXXXXX REV00REV00REV00REV00
MMMMMMMMAAAAAAAANNNNNNNNUUUUUUUUAAAAAAAALLLLLLLL DDDDDDDDEEEEEEEE LLLLLLLLAAAAAAAA AAAAAAAASSSSSSSSIIIIIIIIGGGGGGGGNNNNNNNNAAAAAAAATTTTTTTTUUUUUUUURRRRRRRRAAAAAAAA
CONTROL DIGITAL
INGENIERÍA MECATRÓNICA MECATRÓNICA

1
DIRECTORIODIRECTORIODIRECTORIODIRECTORIO
Secretario de Educación PúblicaSecretario de Educación PúblicaSecretario de Educación PúblicaSecretario de Educación Pública
Dr. Reyes Taméz Guerra Subsecretario de Educación SuperiorSubsecretario de Educación SuperiorSubsecretario de Educación SuperiorSubsecretario de Educación Superior Dr. Julio Rubio Oca Coordinador de Universidades PolitécnicasCoordinador de Universidades PolitécnicasCoordinador de Universidades PolitécnicasCoordinador de Universidades Politécnicas
Dr. Enrique Fernández Fassnacht

2
PAGINA LEGALPAGINA LEGALPAGINA LEGALPAGINA LEGAL
Iván Orlando Rodríguez Martínez – (Universidad Politécnica de Aguascalientes) Primera Edición: 2006 DR 2005 Secretaría de Educación Pública México, D.F. ISBN-----------------

3
ÍNDICEÍNDICEÍNDICEÍNDICE
ÍNDICE ----------------------------------------------------------------------------------------------- 3
INTRODUCCIÓN -------------------------------------------------------------------------------- 3
FICHA TÉCNICA --------------------------------------------------------------------------------- 5
IDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJE ------------------- 7
PLANEACIÓN DEL APRENDIZAJE -------------------------------------------------- 11
LINEAMIENTOS DE EVALUACIÓN -------------------------------------------------- 17
INTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓN
Este manual sirve al Profesor para identificar los objetivos, los contenidos y su programación, correspondientes a la asignatura: Control Digital. El manual detalla las habilidades y valores que desarrolla el estudiante al cumplir con cada objetivo, también da algunas directrices en cuanto a los instrumentos didácticos y de evaluación que podrían aplicarse durante el curso. El Control Digital ha desempeñado un papel muy importante en el avance de la ingeniería y la ciencia. Estos controles, se han vuelto una parte importante de los procesos modernos industriales de manufactura. Además, tienden cada vez más a ser más complejos y pequeños, por lo que resulta importante que un(a) ingeniero(a) en mecatrónica sea capaz de realizar esta optimización en los sistemas de control que diseña.
Las aplicaciones de estos dispositivos van de un simple encendido y apagado de una lámpara hasta procesos tan complicados y veloces como el diseño de sistemas pilotos automáticos en la industria aeroespacial. Sin duda alguna los estudiantes de ingeniería mecatrónica se enfrentarán de aquí en delante con problemas que requieren de ser analizados y/o controlados en forma digital. Por esta y otras razones es imprescindible que los estudiantes de ingeniería mecatrónica estudien y apliquen técnicas para el control digital.
Una vez establecida la relevancia de la asignatura en la carrera de Ing. Mecatrónica, se plantea que el objetivo de la asignatura es: desarrollar la capacidad en el alumno para integrar los sistemas de control discreto empleando una computadora y microprocesadores para el control de procesos. El control digital tiene influencia sobre otras materias debido a que permite al alumno analizar los dispositivos digitales más sofisticados, teniendo aplicación directa con microcontroladores y electrónica digital.
5
FICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICA
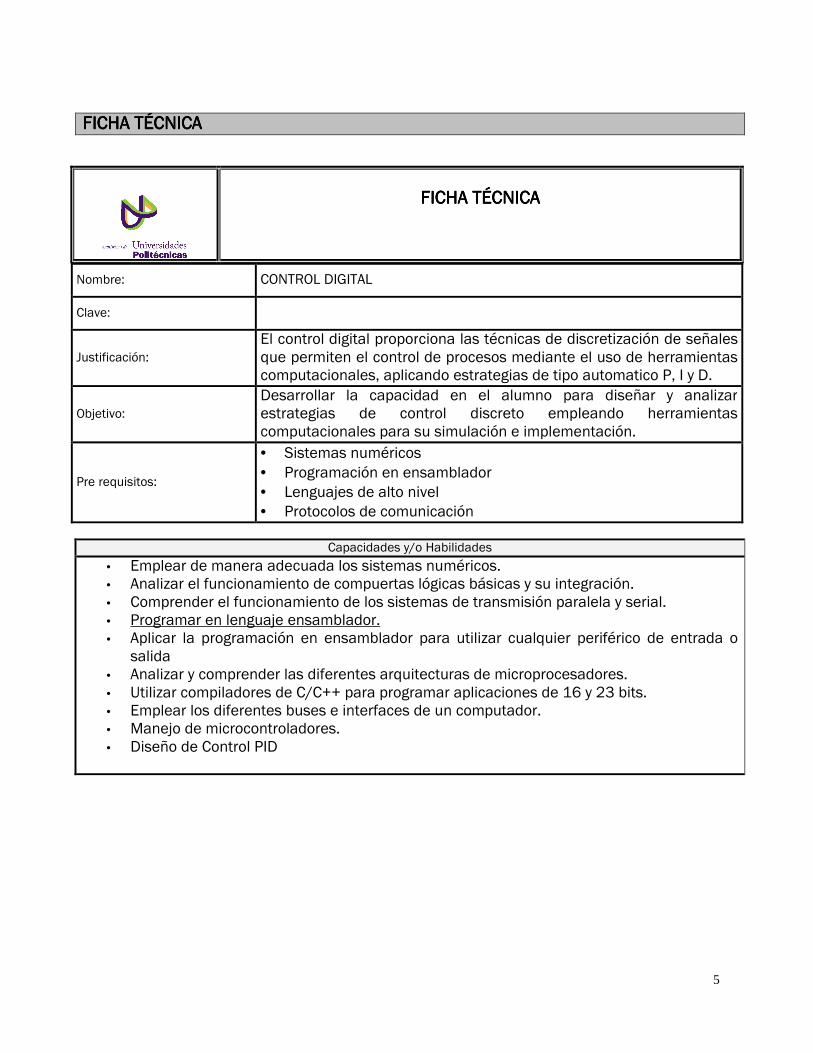
Nombre: CONTROL DIGITAL
Clave:
Justificación: El control digital proporciona las técnicas de discretización de señales que permiten el control de procesos mediante el uso de herramientas computacionales, aplicando estrategias de tipo automatico P, I y D.
Objetivo: Desarrollar la capacidad en el alumno para diseñar y analizar estrategias de control discreto empleando herramientas computacionales para su simulación e implementación.
Pre requisitos:
• Sistemas numéricos • Programación en ensamblador • Lenguajes de alto nivel • Protocolos de comunicación
Capacidades y/o Habilidades
• Emplear de manera adecuada los sistemas numéricos. • Analizar el funcionamiento de compuertas lógicas básicas y su integración. • Comprender el funcionamiento de los sistemas de transmisión paralela y serial. • Programar en lenguaje ensamblador. • Aplicar la programación en ensamblador para utilizar cualquier periférico de entrada o
salida • Analizar y comprender las diferentes arquitecturas de microprocesadores. • Utilizar compiladores de C/C++ para programar aplicaciones de 16 y 23 bits. • Emplear los diferentes buses e interfaces de un computador. • Manejo de microcontroladores. • Diseño de Control PID
FICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICA

6
Estimación de tiempo (horas) necesario para transmitir el aprendizaje al alumno, por Unidad de Aprendizaje:
UNIDADES DE APRENDIZAJE
TEORÍA PRÁCTICA
presencial No
presencial
presencial No
presencial
Conversión de procesamiento de
señales 11.0 0 3.0 3
Aplicación de la transformada Z
11.0 0 3.0 3
Análisis en el dominio de tiempo y en frecuencia de sistemas discretos
7.0 0 12.0 3
Simulación digital 9.0 0 4.0 3 Técnicas de diseño de
control digital 7.0 0 8.0 3
Total de horas por cuatrimestre:
75
Total de horas por semana:
5
Créditos:
Bibliografía:
Ogata, Katsuhiko. Sistemas de Control en Tiempo Discreto. Segunda Edición. Prentice Hall, 1996.
Franklin, Gene F.; Powell, David J.; Workman, Micha el L.; Powell, Dave. Digital Control of Dynamic Systems. Addison-Wesley, 1997.
Paraskevopoulos, P. Digital Control Systems. Prentice-Hall,1996.
Kuo, Benjamin. Digital Control Systems (Second Edition). Hbj College & School Division,1995.
Vaccaro, Richard J. Digital Control: A State-Space Approach. McGraw-Hill, 1995.
Phillips, Ch. L.; Nagle, H. T. Digital Control System Analysis and Design. Prentice Hall International, 1994.
Houpis, Constantine; Lamont, Gary. Digital Control Systems: Theory, Hardware, Software. McGraw-Hill, 1991.
Leigh, J. R. Applied Digital Control: Theory, Design and Implementation. Prentice Hall International, 1984.
7
IDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJE
Unidades de Unidades de Unidades de Unidades de AprendizajeAprendizajeAprendizajeAprendizaje
Resultados de Resultados de Resultados de Resultados de Aprendizaje Aprendizaje Aprendizaje Aprendizaje
Criterios de Desempeño Criterios de Desempeño Criterios de Desempeño Criterios de Desempeño La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:
Evidencias Evidencias Evidencias Evidencias
(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)
TotalTotalTotalTotal
Hrs.Hrs.Hrs.Hrs.
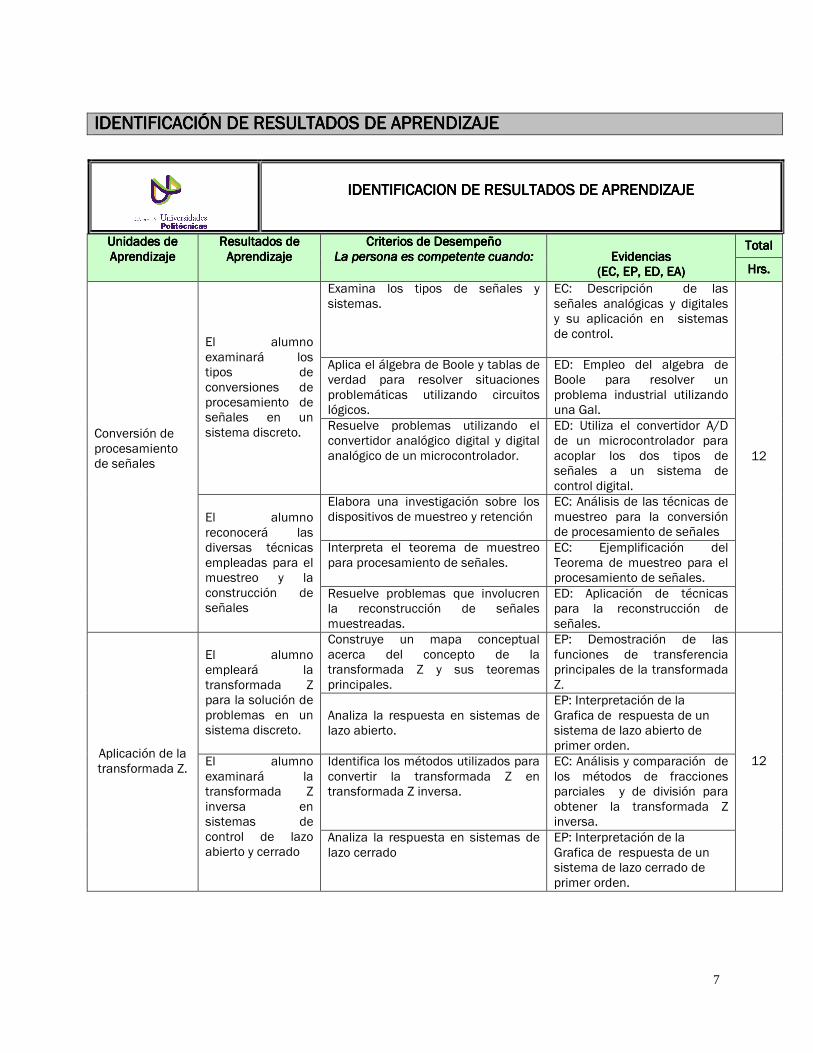
Conversión de procesamiento de señales
El alumno examinará los tipos de conversiones de procesamiento de señales en un sistema discreto.
Examina los tipos de señales y sistemas.
EC: Descripción de las señales analógicas y digitales y su aplicación en sistemas de control.
12
Aplica el álgebra de Boole y tablas de verdad para resolver situaciones problemáticas utilizando circuitos lógicos.
ED: Empleo del algebra de Boole para resolver un problema industrial utilizando una Gal.
Resuelve problemas utilizando el convertidor analógico digital y digital analógico de un microcontrolador.
ED: Utiliza el convertidor A/D de un microcontrolador para acoplar los dos tipos de señales a un sistema de control digital.
El alumno reconocerá las diversas técnicas empleadas para el muestreo y la construcción de señales
Elabora una investigación sobre los dispositivos de muestreo y retención
EC: Análisis de las técnicas de muestreo para la conversión de procesamiento de señales
Interpreta el teorema de muestreo para procesamiento de señales.
EC: Ejemplificación del Teorema de muestreo para el procesamiento de señales.
Resuelve problemas que involucren la reconstrucción de señales muestreadas.
ED: Aplicación de técnicas para la reconstrucción de señales.
Aplicación de la transformada Z.
El alumno empleará la transformada Z para la solución de problemas en un sistema discreto.
Construye un mapa conceptual acerca del concepto de la transformada Z y sus teoremas principales.
EP: Demostración de las funciones de transferencia principales de la transformada Z.
12
Analiza la respuesta en sistemas de lazo abierto.
EP: Interpretación de la Grafica de respuesta de un sistema de lazo abierto de primer orden.
El alumno examinará la transformada Z inversa en sistemas de control de lazo abierto y cerrado
Identifica los métodos utilizados para convertir la transformada Z en transformada Z inversa.
EC: Análisis y comparación de los métodos de fracciones parciales y de división para obtener la transformada Z inversa.
Analiza la respuesta en sistemas de lazo cerrado
EP: Interpretación de la Grafica de respuesta de un sistema de lazo cerrado de primer orden.
IDENTIFICACIONIDENTIFICACIONIDENTIFICACIONIDENTIFICACION DE RESULTADOS DE APRENDIZAJEDE RESULTADOS DE APRENDIZAJEDE RESULTADOS DE APRENDIZAJEDE RESULTADOS DE APRENDIZAJE

8
Unidades de Unidades de Unidades de Unidades de AprendizajeAprendizajeAprendizajeAprendizaje
Resultados de Resultados de Resultados de Resultados de Aprendizaje Aprendizaje Aprendizaje Aprendizaje
Criterios de Desempeño Criterios de Desempeño Criterios de Desempeño Criterios de Desempeño La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:
Evidencias Evidencias Evidencias Evidencias
(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)
TotalTotalTotalTotal
Hrs.Hrs.Hrs.Hrs.
Resuelve problemas en clase utilizando las funciones de transferencia de salida de la transformada Z
EC,: Aplicación de los teoremas de la transformada Z para la solución de sistemas de control.
El alumno interpretará la respuesta transitoria y el offset para un sistema de control en un sistema discreto.
Elabora un reporte acerca de la graficación de la respuesta transitoria de un sistema de control.
ED: Ilustración de la respuesta transitoria de un sistema de control de primer orden.
Calcula el offset para un sistema de control proporcional estable en un sistema discreto.
EC: Cálculo del offset para un sistema proporcional estable en un sistema discreto.
Análisis en el dominio del tiempo y en frecuencia de sistemas discretos
El alumno examinará las representaciones gráficas de las funciones de transferencia senoidales
Elabora un ensayo acerca de las representaciones gráficas de las funciones de transferencia senoidales.
ED Análisis de las trazas logarítmicas, polares y de magnitud logarítmica contra la fase.
22
Enuncia los factores que ocurren en una función de transferencia arbitraria G(jω)H(jω) para una traza logarítmica.
EC: Identificación de la ganancia (K), factores de integral y derivada, factores de primer orden y factores cuadráticos.
El alumno comparará los sistemas de fase mínima y fase no mínimas en un sistema de control.
Realiza una investigación acerca los sistemas de fase mínima y fase no mínima.
EC: Esbozo de la configuración de polos y ceros de un sistema de fase mínima G1(s) y de un sistema de fase no mínima G2(s) y sus características de de fase.
El alumno analizará un sistema de control con retroalimentación unitaria.
Resuelve problemas que involucren las constantes de error estático de posición y velocidad
EC: Análisis de un sistema de control con retroalimentación unitaria
Simulación digital
El alumno utilizará el modelado digital para la graficación de trazas de Bode y Nyquist utilizando el programa Matlab.
Identifica las funciones que se utilizan para la graficación de las Trazas de Bode utilizando el programa Matlab
EC: Aplicación del comando Bode para el calculo de magnitudes y ángulos de fase de la respuesta en frecuencia.
11
Utiliza el programa Matlab para obtener Trazas de Nyquist para representar la respuesta en frecuencia de sistemas de control
EC: Empleo del comando Nyquist para le cálculo de la respuesta en frecuencia utilizando el programa Matlab.
Comprueba mediante una simulación en el programa Matlab la obtención de la traza de Nyquist de un sistema definido en el espacio de estados.
ED: Demostración del comando Nyquist (A,B,C,D) utilizando el programa Matlab.

9
Unidades de Unidades de Unidades de Unidades de AprendizajeAprendizajeAprendizajeAprendizaje
Resultados de Resultados de Resultados de Resultados de Aprendizaje Aprendizaje Aprendizaje Aprendizaje
Criterios de Desempeño Criterios de Desempeño Criterios de Desempeño Criterios de Desempeño La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:
Evidencias Evidencias Evidencias Evidencias
(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)
TotalTotalTotalTotal
Hrs.Hrs.Hrs.Hrs.
El alumno empleará las trazas de magnitud logarítmica para funciones de transferencia senoidal utilizando el programa Matalab.
Explica mediante un ejemplo las Trazas de magnitud logarítmica contra la fase para una frecuencia determinada.
EC: Análisis de las trazas de magnitud logarítmica para una función de transferencia senoidal G(jω) y 1/ G(jω) utilizando el programa Matlab.
El alumno distinguirá las deferentes representaciones de respuesta en frecuencia de una función de transferencia.
Examina la graficación de Bode, polar y de magnitud logarítmica contra la fase.
EC, EP: Análisis de las tres representaciones de respuesta en frecuencia de una función de transferencia haciendo uso del programa Matlab.
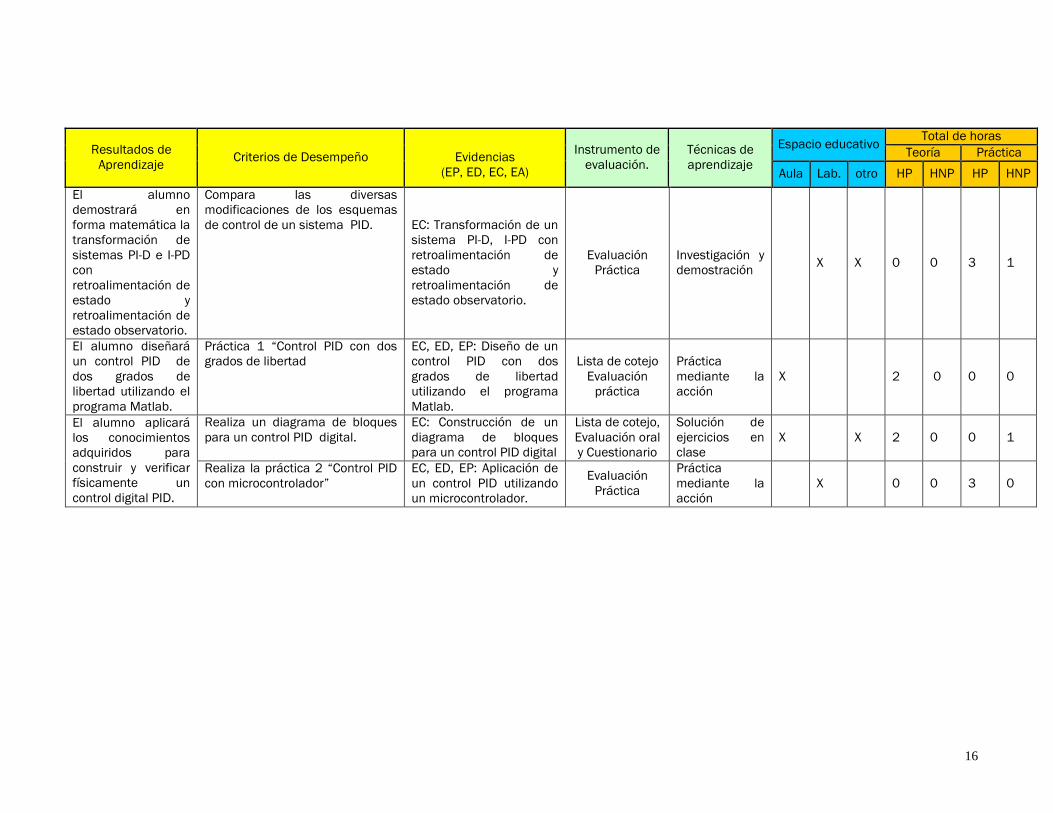
Técnicas de diseño de control digital
El alumno analizará los tipos de controladores PID más utilizados en aplicaciones industriales.
Elabora un ensayo acerca de los esquemas básicos de un control PID y los controladores industriales que se utilizan en la actualidad.
EP: Análisis de los controladores PID neumáticos, hidráulicos y electrónicos utilizados en la industria.
18
El alumno reconocerá las reglas básicas de sintonización para un controlador PID.
Realiza una crítica acerca de la primera y segunda Regla de sintonización de Ziegler-Nichols basada en la respuesta escalón de la planta para un controlador P, PI y PID.
EC: Interpretación de la función de transferencia y la curva de respuesta de un controlador PID sintonizado mediante el método de Ziegler – Nichols.
El alumno demostrará en forma matemática la transformación de sistemas PI-D e I-PD con retroalimentación de estado y retroalimentación de estado observatorio.
Compara las diversas modificaciones de los esquemas de control de un sistema PID. EC: Transformación de un
sistema PI-D, I-PD con retroalimentación de estado y retroalimentación de estado observatorio.
El alumno diseñará un control PID de dos grados de libertad utilizando el programa Matlab.
Práctica 1 “Control PID con dos grados de libertad EC, ED, EP: Diseño de un
control PID con dos grados de libertad utilizando el programa Matlab.

10
Unidades de Unidades de Unidades de Unidades de AprendizajeAprendizajeAprendizajeAprendizaje
Resultados de Resultados de Resultados de Resultados de Aprendizaje Aprendizaje Aprendizaje Aprendizaje
Criterios de Desempeño Criterios de Desempeño Criterios de Desempeño Criterios de Desempeño La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:
Evidencias Evidencias Evidencias Evidencias
(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)
TotalTotalTotalTotal
Hrs.Hrs.Hrs.Hrs.
El alumno aplicará los conocimientos adquiridos para construir y verificar físicamente un control digital PID.
Realiza un diagrama de bloques para un control PID digital.
EC: Construcción de un diagrama de bloques para un control PID digital
Realiza la práctica 2 “Control PID con microcontrolador”
EC, ED, EP: Aplicación de un control PID utilizando un microcontrolador.

11
PLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJE
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
El alumno examinará los tipos de conversiones de procesamiento de señales en un sistema discreto.
Examina los tipos de señales y sistemas.
EC: Descripción de las señales analógicas y digitales y su aplicación en sistemas de control.
Lista de cotejo, Evaluación oral y Cuestionario
Exposición del Profesor
X X 1.0 0 0 1
Aplica álgebra de Boole y tablas de verdad para resolver situaciones problemáticas utilizando circuitos lógicos.
ED: Empleo del algebra de Boole para resolver un problema industrial utilizando una Gal.
Lista de cotejo y Cuestionario
Utilización de diagramas, ilustraciones y esquemas.
X X 1.0 0 1 0
Resuelve problemas utilizando el convertidor analógico digital y digital analógico de un microcontrolador.
ED: Utiliza el convertidor A/D de un microcontrolador para acoplar los dos tipos de señales a un sistema de control digital.
Lista de cotejo, Evaluación oral y Cuestionario
Solución de ejercicios en clase
X X 1.0 0 1 0
El alumno reconocerá las diversas técnicas empleadas para el muestreo y la construcción de señales
Elabora una investigación sobre los dispositivos de muestreo y retención
EC: Análisis de las técnicas de muestreo para la conversión de procesamiento de señales
Lista de cotejo y Cuestionario
Investigación y demostración
X X 1.0 0 0 1
PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE

12
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
Interpreta el teorema de muestreo para procesamiento de señales.
EC: Ejemplificación del Teorema de muestreo para el procesamiento de señales.
Lista de cotejo, Evaluación oral y Cuestionario
Solución de ejercicios en clase
X X 1.0 0 0 1
Resuelve problemas que involucren la reconstrucción de señales muestreadas.
ED: Aplicación de técnicas para la reconstrucción de señales.
Lista de cotejo, Evaluación oral y Cuestionario
Demostración e investigación
X X 1.0 0 1 0
El alumno empleará la transformada Z para la solución de problemas en un sistema discreto.
Construye un mapa conceptual acerca del concepto de la transformada Z y sus teoremas principales.
EP: Demostración de las funciones de transferencia principales de la transformada Z.
Cuestionario Lista de Cotejo
Elaboración de redes semánticas y mapas conceptuales
X X 1.0 0 0 1
Analiza la respuesta en sistemas de lazo abierto.
EP: Interpretación de la Grafica de respuesta de un sistema de lazo abierto de primer orden.
Lista de cotejo, Evaluación oral y Cuestionario
Practica mediante la acción
X X 1.0 0 1 0
El alumno examinará la transformada Z inversa en sistemas de control de lazo abierto y cerrado
Identifica los métodos utilizados para convertir la transformada Z en transformada Z inversa.
EC: Análisis y comparación de los métodos de fracciones parciales y de división para obtener la transformada Z inversa.
Lista de cotejo, Evaluación oral y Cuestionarios
Exposición del profesor
X 1.0 0 0 0
Analiza la respuesta en sistemas de lazo cerrado
EP: Interpretación de la Grafica de respuesta de un sistema de lazo cerrado de primer orden.
Lista de cotejo, Evaluación oral y Cuestionario
Solución de ejercicios en clase
X X 1.0 0 1 0

13
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
Resuelve problemas en clase utilizando las funciones de transferencia de salida de la transformada Z
EC: Aplicación de los teoremas de la transformada Z para la solución de sistemas de control.
Lista de cotejo, Evaluación oral y Cuestionario
Solución de ejercicios en clase.
X X 1.0 0 0 1
El alumno interpretará la respuesta transitoria y el offset para un sistema de control en un sistema discreto.
Elabora un reporte acerca de la relación entre la ecuación de estado, la función de transferencia y el diagrama de estado de los sistemas discretos.
ED: Ilustración de la respuesta transitoria de un sistema de control de primer orden.
Lista de cotejo, Evaluación oral y Cuestionarios
Elaboración de redes y mapas conceptuales
X 0 0 1 0
Calcula el offset para un sistema de control proporcional estable en un sistema discreto.
EC: Cálculo del offset para un sistema proporcional estable en un sistema discreto.
Lista de cotejo, Evaluación oral y Cuestionario
Practica mediante la acción
X X 1.0 0 0 1
El alumno examinará las representaciones gráficas de las funciones de transferencia senoidales
Elabora un ensayo acerca de las representaciones gráficas de las funciones de transferencia senoidales.
ED Análisis de las trazas logarítmicas, polares y de magnitud logarítmica contra la fase.
Lista de cotejo, Evaluación oral y Cuestionario
Elaboración de ensayo.
X X X 1.0 0 3 2
Enuncia los factores que ocurren en una función de transferencia arbitraria G(jω)H(jω) para una traza logarítmica.
EC: Identificación de la ganancia (K), factores de integral y derivada, factores de primer orden y factores cuadráticos.
Lista de cotejo, Evaluación oral y Cuestionario
Discusión dirigida.
X X 2.0 0 3 0
14
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
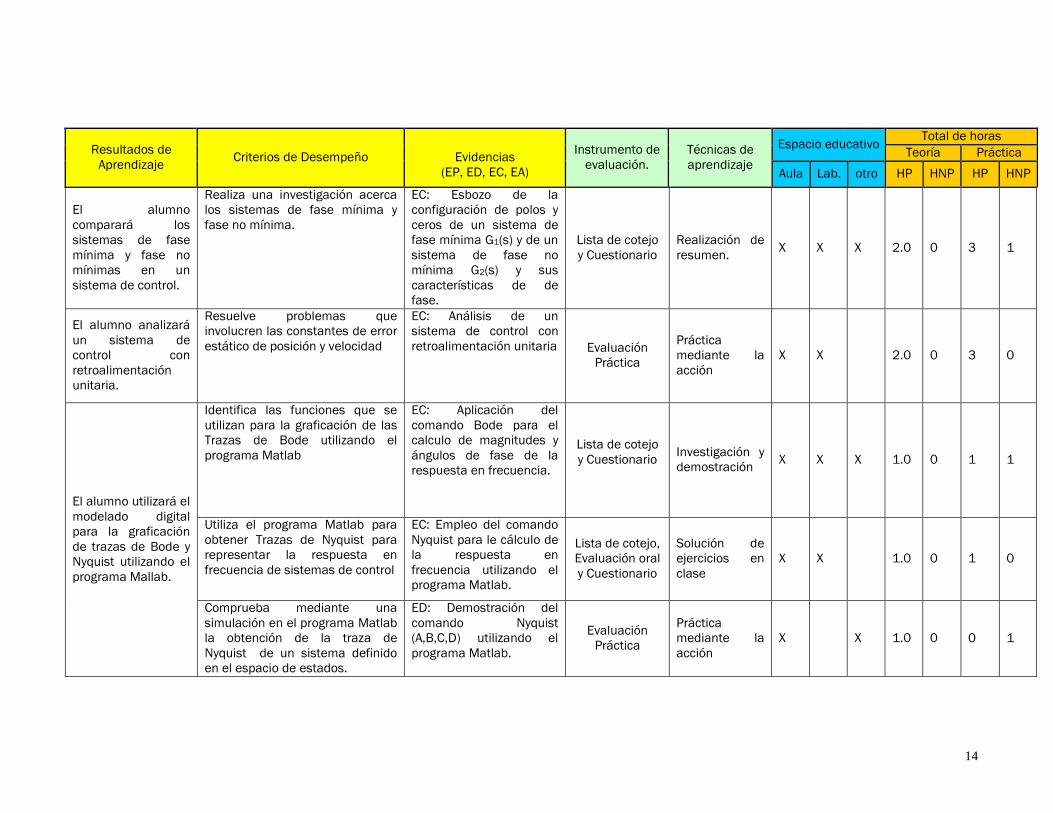
El alumno comparará los sistemas de fase mínima y fase no mínimas en un sistema de control.
Realiza una investigación acerca los sistemas de fase mínima y fase no mínima.
EC: Esbozo de la configuración de polos y ceros de un sistema de fase mínima G1(s) y de un sistema de fase no mínima G2(s) y sus características de de fase.
Lista de cotejo y Cuestionario
Realización de resumen.
X X X 2.0 0 3 1
El alumno analizará un sistema de control con retroalimentación unitaria.
Resuelve problemas que involucren las constantes de error estático de posición y velocidad
EC: Análisis de un sistema de control con retroalimentación unitaria Evaluación
Práctica
Práctica mediante la acción
X X 2.0 0 3 0
El alumno utilizará el modelado digital para la graficación de trazas de Bode y Nyquist utilizando el programa Mallab.
Identifica las funciones que se utilizan para la graficación de las Trazas de Bode utilizando el programa Matlab
EC: Aplicación del comando Bode para el calculo de magnitudes y ángulos de fase de la respuesta en frecuencia.
Lista de cotejo y Cuestionario
Investigación y demostración
X X X 1.0 0 1 1
Utiliza el programa Matlab para obtener Trazas de Nyquist para representar la respuesta en frecuencia de sistemas de control
EC: Empleo del comando Nyquist para le cálculo de la respuesta en frecuencia utilizando el programa Matlab.
Lista de cotejo, Evaluación oral y Cuestionario
Solución de ejercicios en clase
X X 1.0 0 1 0
Comprueba mediante una simulación en el programa Matlab la obtención de la traza de Nyquist de un sistema definido en el espacio de estados.
ED: Demostración del comando Nyquist (A,B,C,D) utilizando el programa Matlab.
Evaluación Práctica
Práctica mediante la acción
X X 1.0 0 0 1
15
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
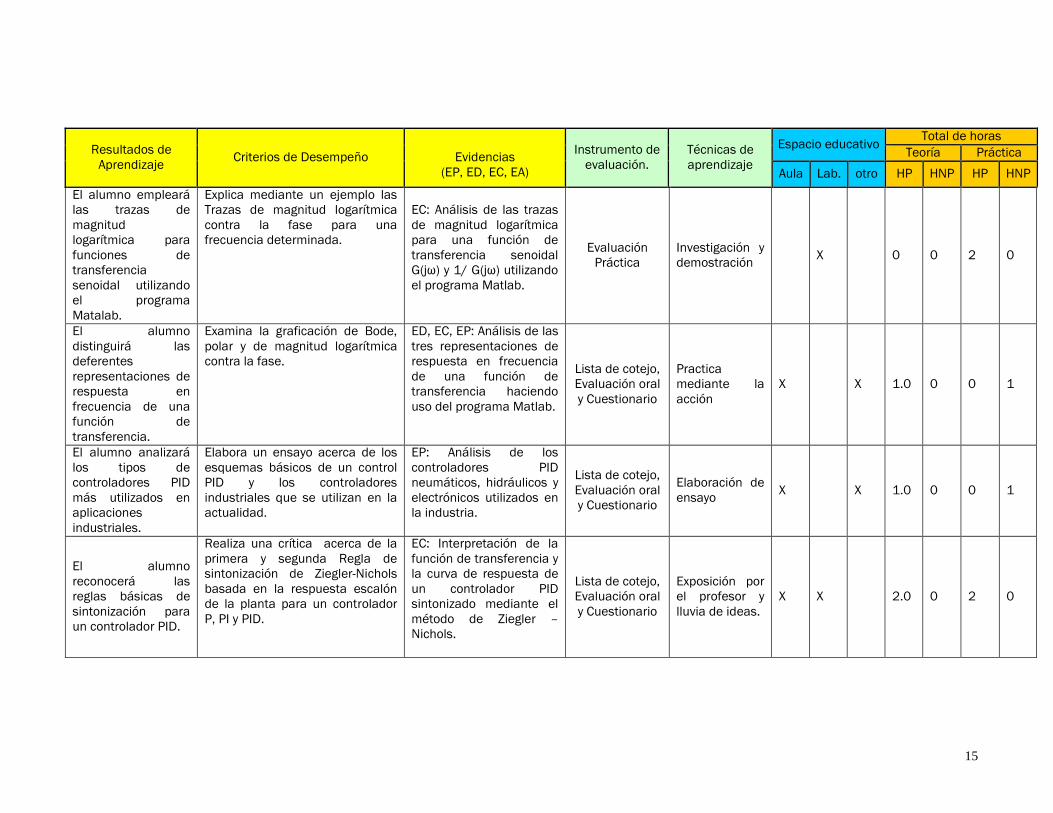
El alumno empleará las trazas de magnitud logarítmica para funciones de transferencia senoidal utilizando el programa Matalab.
Explica mediante un ejemplo las Trazas de magnitud logarítmica contra la fase para una frecuencia determinada.
EC: Análisis de las trazas de magnitud logarítmica para una función de transferencia senoidal G(jω) y 1/ G(jω) utilizando el programa Matlab.
Evaluación Práctica
Investigación y demostración
X 0 0 2 0
El alumno distinguirá las deferentes representaciones de respuesta en frecuencia de una función de transferencia.
Examina la graficación de Bode, polar y de magnitud logarítmica contra la fase.
ED, EC, EP: Análisis de las tres representaciones de respuesta en frecuencia de una función de transferencia haciendo uso del programa Matlab.
Lista de cotejo, Evaluación oral y Cuestionario
Practica mediante la acción
X X 1.0 0 0 1
El alumno analizará los tipos de controladores PID más utilizados en aplicaciones industriales.
Elabora un ensayo acerca de los esquemas básicos de un control PID y los controladores industriales que se utilizan en la actualidad.
EP: Análisis de los controladores PID neumáticos, hidráulicos y electrónicos utilizados en la industria.
Lista de cotejo, Evaluación oral y Cuestionario
Elaboración de ensayo
X X 1.0 0 0 1
El alumno reconocerá las reglas básicas de sintonización para un controlador PID.
Realiza una crítica acerca de la primera y segunda Regla de sintonización de Ziegler-Nichols basada en la respuesta escalón de la planta para un controlador P, PI y PID.
EC: Interpretación de la función de transferencia y la curva de respuesta de un controlador PID sintonizado mediante el método de Ziegler – Nichols.
Lista de cotejo, Evaluación oral y Cuestionario
Exposición por el profesor y lluvia de ideas.
X X 2.0 0 2 0
16
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
El alumno demostrará en forma matemática la transformación de sistemas PI-D e I-PD con retroalimentación de estado y retroalimentación de estado observatorio.
Compara las diversas modificaciones de los esquemas de control de un sistema PID.
EC: Transformación de un sistema PI-D, I-PD con retroalimentación de estado y retroalimentación de estado observatorio.
Evaluación Práctica
Investigación y demostración
X X 0 0 3 1
El alumno diseñará un control PID de dos grados de libertad utilizando el programa Matlab.
Práctica 1 “Control PID con dos grados de libertad
EC, ED, EP: Diseño de un control PID con dos grados de libertad utilizando el programa Matlab.
Lista de cotejo Evaluación práctica
Práctica mediante la acción
X 2 0 0 0
El alumno aplicará los conocimientos adquiridos para construir y verificar físicamente un control digital PID.
Realiza un diagrama de bloques para un control PID digital.
EC: Construcción de un diagrama de bloques para un control PID digital
Lista de cotejo, Evaluación oral y Cuestionario
Solución de ejercicios en clase
X X 2 0 0 1
Realiza la práctica 2 “Control PID con microcontrolador”
EC, ED, EP: Aplicación de un control PID utilizando un microcontrolador.
Evaluación Práctica
Práctica mediante la acción
X 0 0 3 0

17
LINEAMIENTOS DE EVALUACIÓNLINEAMIENTOS DE EVALUACIÓNLINEAMIENTOS DE EVALUACIÓNLINEAMIENTOS DE EVALUACIÓN Los lineamientos de evaluación pueden variar dependiendo de las políticas de evaluación de cada Universidad. La evaluación será por evidencias
EVIDENCIAS DESEMPEÑO PRODUCTO CONOCIMIENTOS
Participación en el aula. Reporte de investigación 1er Parcial UA 1, y 2 Resolución de ejercicios Ejercicios resueltos 2do Parcial UA 3 y 4
Explicación de tareas Examen final Todas las unidades
Lluvia de ideas Aplicación adecuada de procedimientos.
Usar una metodología
Uso adecuado de las herramientas
Responsabilidad Asistencia Entrega de trabajos en tiempo y forma Trabajo en equipo Orden y limpieza Honestidad Disciplina y respeto Uso adecuado de instalaciones No ingerir alimentos en lugar de trabajo Uso adecuado de inmobiliario La evaluación de cada evidencia será mediante un instrumento de evaluación La Evaluación Integradora puede ser la recopilación de evidencias no alcanzadas o Evaluación Departamental, la cual evalúa que se ha alcanzado el objetivo general de la asignatura. El Proyecto Integrador puede ser la presentación, el reporte y armado de un proyecto final que involucre los conocimientos adquiridos que puede ser evaluado junto al profesor titular con otros profesores que le den una vista objetiva al proyecto.

18
DESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICA
Fecha: Nombre de la asignatura:
CONTROL DIGITAL
Nombre:
Controlador digital PID”
Número :
1
Duración (horas) :
2.5
Resultado de aprendizaje:
El alumno analizará un controlador PID haciendo uso del programa MATLAB para su solución.
Justificación
Al analizar un controlador PID se comprenderá la importancia y el uso de dicho control en aplicaciones industriales.
Sector o subsector para el desarrollo de la práctica: Sector Industrial Actividades a desarrollar:
1. Considere los sistemas de las figuras a y b. Obtenga en MATLAB la respuesta de un controlador PID para la entrada de referencia escalón unitario. Compare las curvas de respuesta escalón unitario de los dos sistemas.
DESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICA

19
Evidencia para generar el desarrollo de la práctica: EC, ED, EP: Diseño de un controEC, ED, EP: Diseño de un controEC, ED, EP: Diseño de un controEC, ED, EP: Diseño de un control PID con dos grados de libertad utilizando el programa Matlab.l PID con dos grados de libertad utilizando el programa Matlab.l PID con dos grados de libertad utilizando el programa Matlab.l PID con dos grados de libertad utilizando el programa Matlab.

20
Fecha: Nombre de la asignatura:
CONTROL DIGITAL
Nombre:
Control digital con microcontrolador
Número :
2
Duración (horas) :
2.5
Resultado de aprendizaje:
El alumnoEl alumnoEl alumnoEl alumno diseñará un control PID utilizando un microcontrolador de la serie diseñará un control PID utilizando un microcontrolador de la serie diseñará un control PID utilizando un microcontrolador de la serie diseñará un control PID utilizando un microcontrolador de la serie Microchip 16fx8Microchip 16fx8Microchip 16fx8Microchip 16fx8
Justificación
Haciendo uso de instrucciones de programación se permite diseñar un control proporcional integral derivativo.
Sector o subsector para el desarrollo de la práctica: Sector Industrial Actividades a desarrollar:
1. Desarrollar un diagrama de flujo para el control de un motor de Cd haciendo uso de un controlador PID
2. Cargar las instrucciones en programa ensamblador, PIC C ó PIC BASIC 3. Realizar conexiones eléctricas. 4. Verificar su funcionamiento físico.
Evidencia para generar el desarrollo de la práctica EC, ED, EP: Aplicación de un control PID utilizando un microcontrolador.EC, ED, EP: Aplicación de un control PID utilizando un microcontrolador.EC, ED, EP: Aplicación de un control PID utilizando un microcontrolador.EC, ED, EP: Aplicación de un control PID utilizando un microcontrolador.
DESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICA

21
MÉTODO DE EVALUACIÓNMÉTODO DE EVALUACIÓNMÉTODO DE EVALUACIÓNMÉTODO DE EVALUACIÓN
Unidades de Unidades de Unidades de Unidades de aprendizajeaprendizajeaprendizajeaprendizaje
Resultados de Resultados de Resultados de Resultados de aprendizajeaprendizajeaprendizajeaprendizaje
EVALUACIÓNEVALUACIÓNEVALUACIÓNEVALUACIÓN
Enfoque: Enfoque: Enfoque: Enfoque: (DG)Diagnóstica, (FO) (DG)Diagnóstica, (FO) (DG)Diagnóstica, (FO) (DG)Diagnóstica, (FO) Formativa, (SU) Formativa, (SU) Formativa, (SU) Formativa, (SU) SumativaSumativaSumativaSumativa
TécnicaTécnicaTécnicaTécnica InstrumentInstrumentInstrumentInstrumentoooo Total de Total de Total de Total de horashorashorashoras
Conversión de procesamiento de señales
El alumno examinará los tipos de conversiones de procesamiento de señales en un sistema discreto.
DG FO
Exposición del Profesor
Lista de cotejo, Evaluación oral y Cuestionario
2
FO SU
Utilización de diagramas, ilustraciones y esquemas.
Lista de cotejo, y Cuestionario 2
DG FO
Solución de ejercicios en clase
Lista de cotejo, Evaluación oral y Cuestionario
4
El alumno reconocerá las diversas técnicas empleadas para el muestreo y la construcción de señales
FO SU
Investigación y
demostración
Lista de cotejo, y Cuestionario
2
FO Solución de ejercicios en clase
Lista de cotejo, Evaluación oral y Cuestionario
1
FO Demostración e investigación
Lista de cotejo, Evaluación oral y Cuestionario
1
Aplicación de la transformada Z.
El alumno empleará la transformada Z para la solución de problemas en un sistema discreto.
DG FO
Elaboración de redes semánticas y mapas conceptuales
Cuestionario Lista de Cotejo 2
FO SU
Practica mediante la acción
Lista de cotejo, Evaluación oral y Cuestionario
2
El alumno examinará la transformada Z inversa en sistemas
FO Exposición del profesor
Lista de cotejo, Evaluación oral y Cuestionario
1

22
de control de lazo abierto y cerrado
SU
Solución de ejercicios en
clase
Lista de cotejo, Evaluación oral y Cuestionario
2
FO SU
Solución de ejercicios en clase.
Lista de cotejo, Evaluación oral y Cuestionario
2
El alumno interpretará la respuesta transitoria y el offset para un sistema de control en un sistema discreto.
FO
Elaboración de redes y mapas conceptuales
Lista de cotejo, Evaluación oral y Cuestionario
1
FO DG
Practica mediante la acción
Lista de cotejo, Evaluación oral y Cuestionario
2
Análisis en el dominio del tiempo y en frecuencia de sistemas discretos
El alumno examinará las representaciones gráficas de las funciones de transferencia senoidales
FO DG
Elaboración de ensayo.
Lista de cotejo, Evaluación oral y Cuestionario
6
FO SU
Discusión dirigida.
Lista de cotejo, Evaluación oral y Cuestionario
5
El alumno comparará los sistemas de fase mínima y fase no mínimas en un sistema de control.
FO Realización de resumen.
Lista de cotejo y Cuestionario
6
El alumno analizará un sistema de control con retroalimentación unitaria.
SU Práctica mediante la acción
Evaluación Práctica
5
Simulación digital
El alumno utilizará el modelado digital para la graficación de trazas de Bode y Nyquist utilizando el programa Matlab.
DG FO
Investigación y demostración
Lista de cotejo y Cuestionario
3
FO SU
Solución de ejercicios en clase
Lista de cotejo, Evaluación oral y Cuestionario
2
SU Práctica mediante la acción
Evaluación Práctica
2
El alumno empleará las trazas de magnitud logarítmica para funciones de transferencia senoidal utilizando el programa Matlab.
DG FO
Investigación y demostración
Evaluación Práctica
2
El alumno distinguirá las deferentes representaciones de respuesta en
SU Practica mediante la acción
Lista de cotejo, Evaluación oral y Cuestionario
2
23
frecuencia de una función de transferencia.
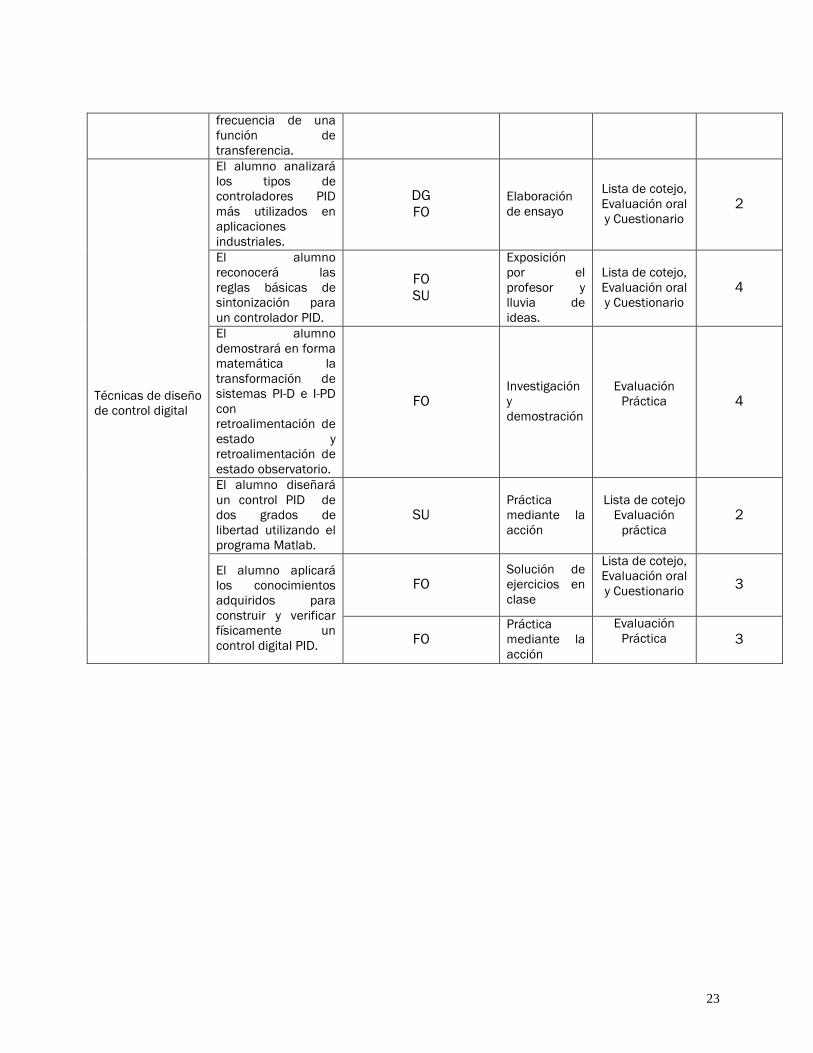
Técnicas de diseño de control digital
El alumno analizará los tipos de controladores PID más utilizados en aplicaciones industriales.
DG FO
Elaboración de ensayo
Lista de cotejo, Evaluación oral y Cuestionario
2
El alumno reconocerá las reglas básicas de sintonización para un controlador PID.
FO SU
Exposición por el profesor y lluvia de ideas.
Lista de cotejo, Evaluación oral y Cuestionario
4
El alumno demostrará en forma matemática la transformación de sistemas PI-D e I-PD con retroalimentación de estado y retroalimentación de estado observatorio.
FO Investigación y demostración
Evaluación Práctica
4
El alumno diseñará un control PID de dos grados de libertad utilizando el programa Matlab.
SU Práctica mediante la acción
Lista de cotejo Evaluación práctica
2
El alumno aplicará los conocimientos adquiridos para construir y verificar físicamente un control digital PID.
FO Solución de ejercicios en clase
Lista de cotejo, Evaluación oral y Cuestionario
3
FO Práctica mediante la acción
Evaluación Práctica
3

24
INSTRUMENTOS DE EVALUACIÓNINSTRUMENTOS DE EVALUACIÓNINSTRUMENTOS DE EVALUACIÓNINSTRUMENTOS DE EVALUACIÓN
COCOCOCONVERSIÓN DE PROCESAMIENTO DE SEÑALESNVERSIÓN DE PROCESAMIENTO DE SEÑALESNVERSIÓN DE PROCESAMIENTO DE SEÑALESNVERSIÓN DE PROCESAMIENTO DE SEÑALES
((((MCFMCFMCFMCF0101)0101)0101)0101) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA,
CONTROL DIGITAL
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
IIIINSTRUCCIONESNSTRUCCIONESNSTRUCCIONESNSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO
MCFMCFMCFMCF0101010101010101----01010101
Responda correctamente las siguientes preguntas:
1. ¿Qué es una señal digital? 2. ¿Cómo funciona una señal analógica? 3. ¿Qué es una Gal y cual es su modo de programación? 4. Emplea una Gal para controlar un proceso industrial.
Anota tus conclusiones y obervaciones.
CUMPLE : SI NO

25
CONVERSIÓN DE PROCESAMIENTO DE SEÑALESCONVERSIÓN DE PROCESAMIENTO DE SEÑALESCONVERSIÓN DE PROCESAMIENTO DE SEÑALESCONVERSIÓN DE PROCESAMIENTO DE SEÑALES
(MCF(MCF(MCF(MCF0102)0102)0102)0102) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
CONTROL DIGITAL
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO
MCFMCFMCFMCF0102010201020102----01010101
1. Explique el funcionamiento de un convertidor análogo digital
2. Elabore un programa utilizando el microcontrolador PICl6F877 en donde utilice el convertidor
Análogo Digital para el control de un proceso.
CUMPLE : SI NO

26
FUNDAMENTOSFUNDAMENTOSFUNDAMENTOSFUNDAMENTOS DE LA TRANSFORMADA ZDE LA TRANSFORMADA ZDE LA TRANSFORMADA ZDE LA TRANSFORMADA Z
((((MCFMCFMCFMCF0103)0103)0103)0103) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
CONTROL DIGITAL
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO

27
MCT0MCT0MCT0MCT0101010103333----01010101
1. Realice una investigación acerca de los métodos de fracciones parciales y de división para obtener la transformada Z inversa.
2. Enuncie los teoremas de la transformada Z para la solución de sistemas de control.
3. Calcule la transformada Z de cada una de las siguientes secuencias indicando la región de convergencia:
=+
=−−−
=+
=
][4
1
2
1.4
]1[2
1.3
]1[.2
][.1
nu
nu
n
n
nn
n
δ
δ
CUMPLE : SI NO

28
APLICACIÓN DE LA TRANSFORMADA ZAPLICACIÓN DE LA TRANSFORMADA ZAPLICACIÓN DE LA TRANSFORMADA ZAPLICACIÓN DE LA TRANSFORMADA Z
(MCF(MCF(MCF(MCF0100100100104444)))) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
CONTROL DIGITAL
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO

29
MCTMCTMCTMCT0100100100104444----00001111
Resuelva de la manera mas adecuada los siguientes problemas
1. Se desea ecualizar acústicamente un pundo de una sala mediante el tratamiento digital de la señal. Para ello, la señal de la fuente es filtrada por un ecualizador digital H(z) realizable (es decir, causal y estable) antes de alimentar el altavoz, tal como se muestra en la figura:
El efecto de la sala se modela mediante G(z), función de transferencia equivalente entre el punto A y B; se considera la sala acústicamente ecualizada en módulo y fase en el punto B, si la función de transferencia entre la fuente y dicho punto es la unidad. Se pide:
a) Calcular la expresión y la ROC de la función de transferencia H (z) del ecualizador que permite ecualizar completamente (tanto en fase como en amplitud) la respuesta en el punto B, si la función G(z) = 1 + z-1 + 0.5 z-2. Razone si dicho ecualizador es realizable
b) Repita lo anterior cuando G(z) = 1 + 2z-1 + 2 z-2
CUMPLE : SI NO

30
FRECUENCIA DE SISTEMAS DISCRFRECUENCIA DE SISTEMAS DISCRFRECUENCIA DE SISTEMAS DISCRFRECUENCIA DE SISTEMAS DISCRETOSETOSETOSETOS
(MCF(MCF(MCF(MCF0100100100105555)))) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
CONTROL DIGITAL
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO

31
MCTMCTMCTMCT0100100100105555----00001111
Resuelva de la manera mas adecuada los siguientes problemas:
1. Considere el sistema con realimentación unitaria con las funciones de transferencia en lazo abierto.
Obtenga la salida en estado estable del sistema cuando está sujeto a cada una de las entradas siguientes: (a) r(t) = sen (t + 30”) (b) r(t) = 2 cos (2t - 45”) (c) r(t) = sen(t + 30”) - 2 cos (2t - 45”) 2. Considere el sistema cuya función de transferencia en lazo cerrado es
Obtenga la salida en estado estable del sistema cuando está sujeto ã la entrada r(t) = R R R R sen ωt. 3. Dibuje las trazas de Bode de las tres funciones de transferencia siguientes:
1. Considere un sistema de control con realimentación unitaria con la siguiente función de transferencia en lazo:
Éste es un sistema de fase no mínima. Dos de los tres polos en lazo abierto se ubican en el semiplano derecho del plano s del modo siguiente: Polos en lazo abierto en s = 1.4656 s = 0.2328 + jo.7926 s = 0.2328 + jo.7926 s = 0.2328 + jo.7926 s = 0.2328 + jo.7926 s = 0.2328 s = 0.2328 s = 0.2328 s = 0.2328 ---- jo.7926jo.7926jo.7926jo.7926 Grafique las trazas de Bode de G(s) con MATLAB. Explique por qué la curva del ángulo de fase empieza a partir de 0” y tiende a +180°.

32
DIAGRAMAS DE NYDIAGRAMAS DE NYDIAGRAMAS DE NYDIAGRAMAS DE NYQUISTQUISTQUISTQUIST
(MCF(MCF(MCF(MCF0106)0106)0106)0106) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
CONTROL DIGITAL
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO

33
MCT0106MCT0106MCT0106MCT0106----01010101
Resolver los siguientes problemas:
1. Dibuje un lugar geométrico de Nyquist para el sistema de control con realimentación unitaria con la función de transferencia en lazo abierto
Usando el criterio de estabilidad de Nyquist, determine la estabilidad del sistema en lazo cerrado. 2. Considere el sistema en lazo cerrado con la siguiente función de transferencia en lazo abierto:
Grafique las trazas polares directa e inversa de G(s)H(s) con K K K K = 1 y K K K K = 10. Aplique el criterio de estabilidad de Nyquist a las trazas y determine la estabilidad del sistema con estos valores de K.K.K.K. 3. Dibuje una traza de Nyquist para el G(s) siguiente:
CUMPLE : SI NO

34
DIAGRAMAS DE BODEDIAGRAMAS DE BODEDIAGRAMAS DE BODEDIAGRAMAS DE BODE
((((MCFMCFMCFMCF0101010107070707)))) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
CONTROL DIGITAL
CÓDIGO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO

35
MCT01MCT01MCT01MCT0107070707----01010101
Resuelva los siguientes problemas:
1.- Considere el sistema de la figura. Dibuje las trazas de Bode de la función de transferencia en lazo abierto. G(s). Determine el margen de fase y el margen de ganancia.
�
2.- La figura 8-138 muestra las trazas de Bode de una función de transferencia G(s). Determine esta función de transferencia.
CUMPLE : SI NO

36
DIAGRAMDIAGRAMDIAGRAMDIAGRAMA DE BODEA DE BODEA DE BODEA DE BODE
(MCT01(MCT01(MCT01(MCT0108)08)08)08) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
CONTROL DIGITAL
CÓDIGO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO

37
MCT01MCT01MCT01MCT01----08080808
1. Resuelva el siguiente problema:
En la figura 8- 139 aparecen las trazas de Bode determinadas experimentalmente de un sistema G(jω). Determine la función de transferencia G (s).
CUMPLE : SI NO

38
CONTROL PIDCONTROL PIDCONTROL PIDCONTROL PID
(MCT01(MCT01(MCT01(MCT0109)09)09)09) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
CONTROL DIGITAL
CÓDIGO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO

39
MCT0109-01
Resuelva los siguientes problemas:
1.- Considere el controlador PID electrónico de la figura. Determine los valores de R1, R2, R3, R4, CI, y C2 del controlador, tales que la función de transferencia G,(s) sea
�
2.- Considere el sistema de control de la figura Usando las reglas de sintonización de Ziegler - Nichcils determine los valores de Kp, Ti y Td. Se pretende que el sobrepaso máximo en la respuesta escalón unitario sea aproximadamente de 25%.
3.- Demuestre que el sistema con un control PID que aparece en la figura (a) es equivalente al sistema con un control I-PD con control retroalimentado de la figura (b)

40
CUMPLE : SI NO
APLICACIÓN DEL CONTROL PIDAPLICACIÓN DEL CONTROL PIDAPLICACIÓN DEL CONTROL PIDAPLICACIÓN DEL CONTROL PID
((((MCT01MCT01MCT01MCT0110101010)))) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
CONTROL DIGITAL
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE
FORMACIÓN
Octavo Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO
41
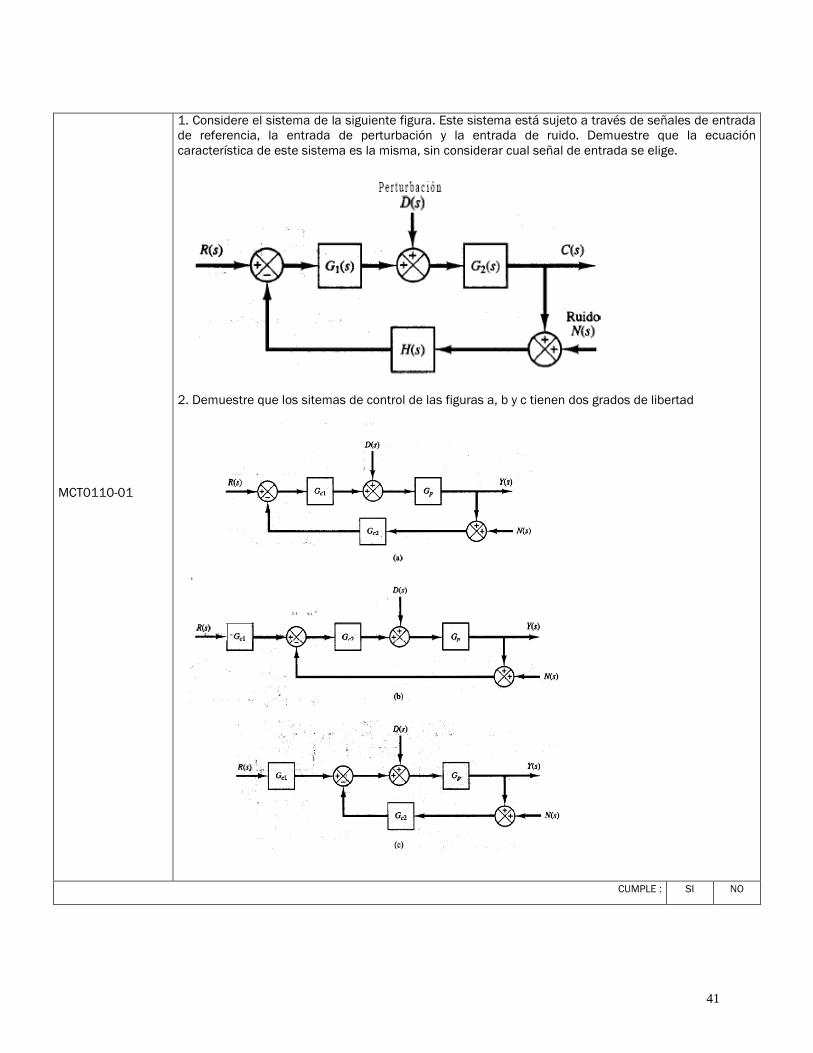
MCT0110-01
1. Considere el sistema de la siguiente figura. Este sistema está sujeto a través de señales de entrada de referencia, la entrada de perturbación y la entrada de ruido. Demuestre que la ecuación característica de este sistema es la misma, sin considerar cual señal de entrada se elige.
2. Demuestre que los sitemas de control de las figuras a, b y c tienen dos grados de libertad
CUMPLE : SI NO
42
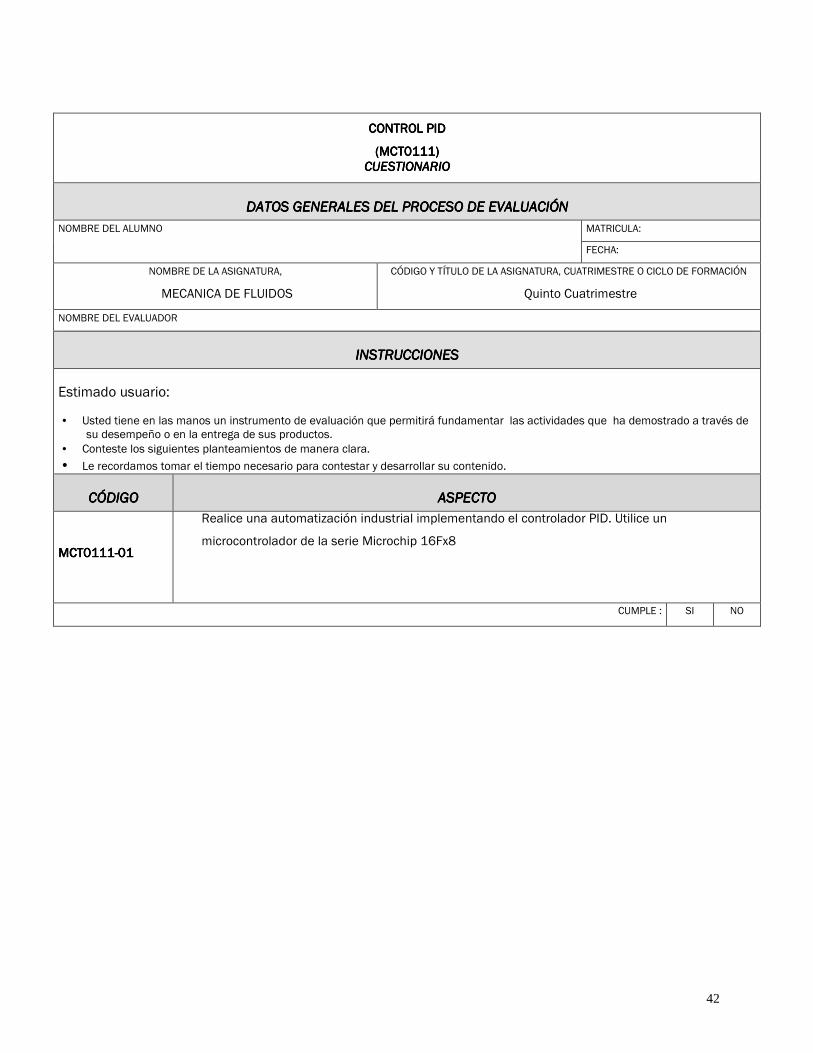
CONTROL PIDCONTROL PIDCONTROL PIDCONTROL PID
(MCT01(MCT01(MCT01(MCT0111111111)))) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERDATOS GENERDATOS GENERDATOS GENERALES DEL PROCESO DE EVALUACIÓNALES DEL PROCESO DE EVALUACIÓNALES DEL PROCESO DE EVALUACIÓNALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA,
MECANICA DE FLUIDOS
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Quinto Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO
MCT01MCT01MCT01MCT0111111111----01010101
Realice una automatización industrial implementando el controlador PID. Utilice un
microcontrolador de la serie Microchip 16Fx8
CUMPLE : SI NO

43
UNIVUNIVUNIVUNIVERSIDAD POLITÉCNICA DE AGUASCALIENTESERSIDAD POLITÉCNICA DE AGUASCALIENTESERSIDAD POLITÉCNICA DE AGUASCALIENTESERSIDAD POLITÉCNICA DE AGUASCALIENTES
INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA
EVALUACIÓN DE EJERCICIOS EVALUACIÓN DE EJERCICIOS EVALUACIÓN DE EJERCICIOS EVALUACIÓN DE EJERCICIOS
LISTA DE COTEJO LISTA DE COTEJO LISTA DE COTEJO LISTA DE COTEJO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO: MATRICULA: FIRMA DEL ALUMNO:
PRODUCTO: PARCIAL: FECHA:
MATERIA: CLAVE:
NOMBRE DEL MAESTRO: FIRMA DEL MAESTRO:
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
En la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esencial o encial o encial o encial o importante) importante) importante) importante)
Revisar las actividades quRevisar las actividades quRevisar las actividades quRevisar las actividades que se solicitan y marque en los apartados e se solicitan y marque en los apartados e se solicitan y marque en los apartados e se solicitan y marque en los apartados “SI” cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque “NO”. En la columna “OBSERVACIONES” mencione indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no En la columna “OBSERVACIONES” mencione indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no En la columna “OBSERVACIONES” mencione indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no En la columna “OBSERVACIONES” mencione indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no cumplidas, si fuese necesaricumplidas, si fuese necesaricumplidas, si fuese necesaricumplidas, si fuese necesario.o.o.o.
CódigoCódigoCódigoCódigo ValorValorValorValor Característica a cumplir (Reactivo)Característica a cumplir (Reactivo)Característica a cumplir (Reactivo)Característica a cumplir (Reactivo) CUMPLECUMPLECUMPLECUMPLE
OBSERVACIONESOBSERVACIONESOBSERVACIONESOBSERVACIONES
SISISISI NONONONO
10%10%10%10% ActitudesActitudesActitudesActitudes Realiza las tareas requeridas de acuerdo a lo indicado, manteniendo el orden y pulcritud.
10%10%10%10% Presentación Presentación Presentación Presentación El ejercicio es presentado en forma ordenada y limpia
20%20%20%20% Desarrollo. Desarrollo. Desarrollo. Desarrollo. Aplica adecuadamente los procedimientos
20%20%20%20% Realizó todas las operaciones y despejes correctamente
20%20%20%20% Aprendizajes.Aprendizajes.Aprendizajes.Aprendizajes. Se alcanzaron al 100% los resultados de aprendizaje
5%5%5%5% Funcionalidad.Funcionalidad.Funcionalidad.Funcionalidad. Los valores de las incógnitas a determinar son los correctos.
10%10%10%10% HabilidadesHabilidadesHabilidadesHabilidades .... Trabaja en equipo.
5%5%5%5% Responsabilidad. Responsabilidad. Responsabilidad. Responsabilidad. Entregó las evidencias en la fecha y hora señalada
CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:

44
UNIVERSIDAD POLITÉCNICA DE UNIVERSIDAD POLITÉCNICA DE UNIVERSIDAD POLITÉCNICA DE UNIVERSIDAD POLITÉCNICA DE AGUASCALIENTESAGUASCALIENTESAGUASCALIENTESAGUASCALIENTES INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA
EVALEVALEVALEVALUACIÓN DE PROYECTO INTEGRADOR UACIÓN DE PROYECTO INTEGRADOR UACIÓN DE PROYECTO INTEGRADOR UACIÓN DE PROYECTO INTEGRADOR Y PRÁCTICASY PRÁCTICASY PRÁCTICASY PRÁCTICAS
LISTA DE COTEJOLISTA DE COTEJOLISTA DE COTEJOLISTA DE COTEJO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO: MATRICULA: FIRMA DEL ALUMNO:
PRODUCTO: PARCIAL: FECHA:
MATERIA: CLAVE:
NOMBRE DEL MAESTRO: FIRMA DEL MAESTRO:
INSTRUCCIONEINSTRUCCIONEINSTRUCCIONEINSTRUCCIONESSSS
En la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esencial o encial o encial o encial o importanteimportanteimportanteimportante. . . . Revisar las actividades que se solicitan y marque en los apartados Revisar las actividades que se solicitan y marque en los apartados Revisar las actividades que se solicitan y marque en los apartados Revisar las actividades que se solicitan y marque en los apartados “SI” cuando la evidencia se cumple; en cuando la evidencia se cumple; en cuando la evidencia se cumple; en cuando la evidencia se cumple; en caso contrario caso contrario caso contrario caso contrario marque marque marque marque “NO”. En la columna “OBSERVACIONES” ” mencione indicaciones que puedan ayudar al alumno a saber cuales son las En la columna “OBSERVACIONES” ” mencione indicaciones que puedan ayudar al alumno a saber cuales son las En la columna “OBSERVACIONES” ” mencione indicaciones que puedan ayudar al alumno a saber cuales son las En la columna “OBSERVACIONES” ” mencione indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no cumplidas, si fuese necesario.condiciones no cumplidas, si fuese necesario.condiciones no cumplidas, si fuese necesario.condiciones no cumplidas, si fuese necesario.
CódigoCódigoCódigoCódigo ValorValorValorValor Característica a cumplir (Reactivo)Característica a cumplir (Reactivo)Característica a cumplir (Reactivo)Característica a cumplir (Reactivo) CUMPLECUMPLECUMPLECUMPLE
OBSERVACIONESOBSERVACIONESOBSERVACIONESOBSERVACIONES
SSSSIIII NONONONO
10%10%10%10%
Presentación Presentación Presentación Presentación El reporte cumple con los requisitos de:
a. Buena presentación b. No tiene faltas de ortografía c. Maneja el lenguaje técnico
apropiado.
10%10%10%10%
Contenido. Contenido. Contenido. Contenido. El reporte contiene los campos según formato (Número mínimo de cuartillas, antecedentes, justificación, introducción, desarrollo, indicadores de resultados, conclusiones, fuentes bibliográficas, etc.).
10%10%10%10% Introducción y Objetivo.Introducción y Objetivo.Introducción y Objetivo.Introducción y Objetivo. La introducción y el objetivo dan una idea clara del contenido del reporte.
10%10%10%10% Sustento Teórico.Sustento Teórico.Sustento Teórico.Sustento Teórico. Presenta un panorama general del tema a desarrollar y lo sustenta con referencias bibliográficas
20%20%20%20% Desarrollo.Desarrollo.Desarrollo.Desarrollo. Sigue una metodología y sustenta todos los pasos que se realizaron.
20%20%20%20% ResultadosResultadosResultadosResultados. Cumplió totalmente con el objetivo esperado
10%10%10%10% Conclusiones.Conclusiones.Conclusiones.Conclusiones. Las conclusiones son claras y acordes con el objetivo esperado
10%10%10%10% Responsabilidad. Responsabilidad. Responsabilidad. Responsabilidad. Entregó el reporte en la fecha y hora señalada
CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:

45
UNIVERSIDAD POLITÉCNICA DE UNIVERSIDAD POLITÉCNICA DE UNIVERSIDAD POLITÉCNICA DE UNIVERSIDAD POLITÉCNICA DE AGUASCALIENTESAGUASCALIENTESAGUASCALIENTESAGUASCALIENTES
INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA EVALUACIÓN DEVALUACIÓN DEVALUACIÓN DEVALUACIÓN DE DESEMPEÑO DEL ALUMNO E DESEMPEÑO DEL ALUMNO E DESEMPEÑO DEL ALUMNO E DESEMPEÑO DEL ALUMNO
GUIA DE OBSERVACIÓNGUIA DE OBSERVACIÓNGUIA DE OBSERVACIÓNGUIA DE OBSERVACIÓN
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO: MATRICULA: FIRMA DEL ALUMNO:
PRODUCTO: PARCIAL: FECHA:
MATERIA: CLAVE:
NOMBRE DEL MAESTRO: FIRMA DEL MAESTRO:
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Esté tipo dEsté tipo dEsté tipo dEsté tipo de evidencia se evalúa durante el desarrollo de la asignatura e evidencia se evalúa durante el desarrollo de la asignatura e evidencia se evalúa durante el desarrollo de la asignatura e evidencia se evalúa durante el desarrollo de la asignatura
En la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esencial o encial o encial o encial o importanteimportanteimportanteimportante
Revisar las actividades que se solicitan y marqueRevisar las actividades que se solicitan y marqueRevisar las actividades que se solicitan y marqueRevisar las actividades que se solicitan y marque en los apartados en los apartados en los apartados en los apartados “SI” cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque “NO”. En la columna “OBSERVACIONES”indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no En la columna “OBSERVACIONES”indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no En la columna “OBSERVACIONES”indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no En la columna “OBSERVACIONES”indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no cumplidas, si fuese necesario.cumplidas, si fuese necesario.cumplidas, si fuese necesario.cumplidas, si fuese necesario.
CódigoCódigoCódigoCódigo ValorValorValorValor Característica aCaracterística aCaracterística aCaracterística a cumplir (Reactivo)cumplir (Reactivo)cumplir (Reactivo)cumplir (Reactivo) CUMPLECUMPLECUMPLECUMPLE
OBSERVACIONESOBSERVACIONESOBSERVACIONESOBSERVACIONES SISISISI NONONONO
5%5%5%5% ActitudesActitudesActitudesActitudes
10%10%10%10% Realiza las tareas requeridas de acuerdo a lo indicado, manteniendo el orden y pulcritud.
5%5%5%5% Respeto hacia los demás
5%5%5%5% Presentación Presentación Presentación Presentación
10%10%10%10% La actividad de aprendizaje es presentada en forma ordenada y limpia
5%5%5%5% Uso de Instalaciones Uso de Instalaciones Uso de Instalaciones Uso de Instalaciones
5%5%5%5% Uso adecuado de mobiliario
0%0%0%0% No ingerir alimentos en el lugar de trabajo
10%10%10%10% Participación en el Aula Participación en el Aula Participación en el Aula Participación en el Aula
10%10%10%10% Resolución de ejercicios
5%5%5%5% Explicación de tareas
5%5%5%5% Lluvia de ideas
5%5%5%5% HabilidadesHabilidadesHabilidadesHabilidades
5%5%5%5% Trabaja en equipo.
5%5%5%5% Responsabilidad Responsabilidad Responsabilidad Responsabilidad
5%5%5%5% Entregó las evidencias en la fecha y hora señalada
5%5%5%5% Asistencia
CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:
46
GLOSARIOGLOSARIOGLOSARIOGLOSARIO
AAAA Ancho de banda.Ancho de banda.Ancho de banda.Ancho de banda. Frecuencia a la que la magnitud de respuesta en frecuencia es -3 dB debajo de la BBBB Binario:Binario:Binario:Binario: Sistema de numeración en el que sólo hay dos posibles estados 0 y 1 CCCC Carta de Nichols.Carta de Nichols.Carta de Nichols.Carta de Nichols. Lugar geométrico de respuesta de magnitud constante en lazo cerrado y de respuesta en frecuencia en fase en lazo cerrado, para sistemas de retroalimentacion unitaria graficadas sobre el plando de dB en lazo abierto contra el ángulo de fase. Compensador digitalCompensador digitalCompensador digitalCompensador digital. Función de transferencia nuestreada empleada para mejorar la respuesta de sistemas retroalimentados controlados por computadora. Constante de aceleraciónConstante de aceleraciónConstante de aceleraciónConstante de aceleración. lím s2 G(s). Constante de posiciónConstante de posiciónConstante de posiciónConstante de posición. lím G(s). Constante de velocidadConstante de velocidadConstante de velocidadConstante de velocidad. lím sG(s). Constante de error estático.Constante de error estático.Constante de error estático.Constante de error estático. Conjunto constante de posición, constante de velocidad, y constante de aceleración. ControControControControlador.lador.lador.lador. Subsistema que genera la entrada a la planta o proceso. Controlador porporcional mas derivativo (PD).Controlador porporcional mas derivativo (PD).Controlador porporcional mas derivativo (PD).Controlador porporcional mas derivativo (PD). Controlador que alimenta en forma diracta a la planta una proporción de señal de actuación más su derivada, para mejorar la respuesta transitoria de un sistema en lazo cerrado. Controlador proporcional mas integral (PI).Controlador proporcional mas integral (PI).Controlador proporcional mas integral (PI).Controlador proporcional mas integral (PI). Controlador que alimenta en forma directa a la planta una proporción de la señal de actuación más su integral, para mejorar el error de estado estable en un sistema de lazo cerrado. Controlador proporcional más integral mas derivativo (PID). Controlador proporcional más integral mas derivativo (PID). Controlador proporcional más integral mas derivativo (PID). Controlador proporcional más integral mas derivativo (PID). Controlador que alimenta en forma directa a la planta una proporción de la señal de actuación mas su integrla más su derivad, para mejorar la respuesta transitorio y el error en estado estable en un sistema de lazo cerrado.

47
Convertidor analógico digital. Convertidor analógico digital. Convertidor analógico digital. Convertidor analógico digital. Dispositivo que convierte señales analógicas en señales digitales. Convertidor digital analógico. Convertidor digital analógico. Convertidor digital analógico. Convertidor digital analógico. Dispositivo que conviete señales digitales en señales analógicas. DDDD Decibel (dB). Decibel (dB). Decibel (dB). Decibel (dB). El decibel se define como 10 log PG, donde PG es la ganancia de potencia de una señal. De modo equivalente, el decibel tambíen es 20 log VG, donde VG es la ganancia de voltaje de una señal. Diagrama de bloques. Diagrama de bloques. Diagrama de bloques. Diagrama de bloques. Representación de la interconexión de subsitemas que forman un sistema. En un sistema lineal, el diagrama de bloques está formado por bloques que representan subsistemas, las flechas representan señales, puntos suma y puntos de unión. Diagrama de Nyquist (traza). Diagrama de Nyquist (traza). Diagrama de Nyquist (traza). Diagrama de Nyquist (traza). Gráfica de respuesta en frecuencia polar hecha para la función de transferencia en lazo abierto. EEEE Error. Error. Error. Error. Es la diferencia entre la entrada y la salida de un sistema. Error de estado estable. Error de estado estable. Error de estado estable. Error de estado estable. Diferencia entre la entrada y la salida de un sistema después que la respuesta libre haya caído a cero. Espacio de estados.Espacio de estados.Espacio de estados.Espacio de estados. Espacio de n dimensiones cuyos ejes son las variables de estado. Estabilidad.Estabilidad.Estabilidad.Estabilidad. Característica de un sistema definida por una respuesta libre que ni decae nicrece, sino que permanece constante y oscila a medida que el tiempo tiende al infinito mientras la entrada no sea de la misma forma que la respuesta natural del sistema. FFFF Función de transferencia. Función de transferencia. Función de transferencia. Función de transferencia. Cociente entre la transformada de Laplace de la salida de un sistema y la transformada de Laplace de la entrada. Función de transferenFunción de transferenFunción de transferenFunción de transferencia de lazo abierto. cia de lazo abierto. cia de lazo abierto. cia de lazo abierto. Para un sistema genérico realimentado con G(s) en la trayectoria directa y H(s) en la trayectoria
48
de retroalimentación, la función de transferencia de lazo abierto es el producto de la función de transferencia de trayectoria directa y la función de transferencia de retroalientación, o bien, G(s)H(s). Función de taransferencia en lazo cerrado.Función de taransferencia en lazo cerrado.Función de taransferencia en lazo cerrado.Función de taransferencia en lazo cerrado. Para un sistema genérico retroalimentado con G(s) en la trayectoria directa y H(s) en la trayectoria de retroalimentación, la función de transferencia en lazo cerrado, T(s), es G(s)/H(s)], donde el + es para retroalimentación negativa y el - es para retroalimentación positiva GGGG Ganancia.Ganancia.Ganancia.Ganancia. Cociente entre salida y entrada; se usa paor lo general para describir la amplificación en el estado estable de la magnitud de entradas senoidales, incluyendo cd. Ganancia en la trayectoria directa. Ganancia en la trayectoria directa. Ganancia en la trayectoria directa. Ganancia en la trayectoria directa. Producto de ganacias encontradas al recorrer una trayectoria que siga la dirección de flujo de la señal desde el nodo de entrada al nodo de salida de una gráfica de flujo de señal. Ganancia en lazo.Ganancia en lazo.Ganancia en lazo.Ganancia en lazo. Psra una grafica de flujo de señales, es el producto de ganacias de rama encontradas al recorrer una trayectoria que se inicia en un nodo y termina en el mismo nodo sin pasar por nintun otro nodo más de una vez, y siguiendo la dirección del flujo de la señal. IIII Inestabilidad. Inestabilidad. Inestabilidad. Inestabilidad. Característica de un sistema definido por una respuesta libre que crece sin límite a medida que el tiempo tiende al infinito. LLLL Linealización. Linealización. Linealización. Linealización. Proceso de aproximar una ecuación diferencial no lineal con una ecuación diferencial lineal válida para pequeñas excursiones alrededor del equilibrio. MMMM Margen de fase. Margen de fase. Margen de fase. Margen de fase. Cantidad de defasamiento adicional en lazo abierto, necesaria a la ganancia unitaria, para hacer inestable le sistema en lazo cerrado. MargeMargeMargeMargen de ganancia. n de ganancia. n de ganancia. n de ganancia. Cantidad de ganancia adicional en lazo abierto, expresada en decibles (dB), necesaria a 180° de desfasamiento para hacer inestable el sistema en lazo cerrado.

49
RRRR Respuesta transitoria. Respuesta transitoria. Respuesta transitoria. Respuesta transitoria. Parte de la curva de respuesta debida al sistema y la forma en que el sistema adquiere o dispa energía. En sistemas estables, es la parte de la gráfica de respuesta antes de la respuesta en estado estable. SSSS Sensibilidad. Sensibilidad. Sensibilidad. Sensibilidad. Es la pendiente de la curva de calibración que puede ser o no constante a lo largo de la escala medida. Sistema en lazo abierto.Sistema en lazo abierto.Sistema en lazo abierto.Sistema en lazo abierto. Sistema que no observa su salida y corrige perturbaciones. Sistema de Lazo cerrado.Sistema de Lazo cerrado.Sistema de Lazo cerrado.Sistema de Lazo cerrado. Sistema que observa su slida y corrige perturbaciones. Se caracteriza por trauectorias de retroalimentación provenientes de salida. TTTT Transformada de Laplace. Transformada de Laplace. Transformada de Laplace. Transformada de Laplace. Transformación que permite representar ecuaciones diferenciales lineales como expresiones algebraicas. La transfomación es espacialmente útil para modelar, analizar y diseñar sistemas de control, así como para resolver ecuaciones diferenciales lineales. Transformada Z.Transformada Z.Transformada Z.Transformada Z. Transformación relacionada con la transformada de Laplace que se emplea para la representación, análisis y diseño de señales y sistemas muestreados. Traza de BTraza de BTraza de BTraza de Bode (gráfica). ode (gráfica). ode (gráfica). ode (gráfica). Gráfica de respuesta en frecuencia senoidal, donde la respuesta en magnitud se grafica en forma separada de la respuesta de fase. Velocidad de muestreo de Nyquist. Velocidad de muestreo de Nyquist. Velocidad de muestreo de Nyquist. Velocidad de muestreo de Nyquist. Frecuencia mínima a la que una señal analógica debe ser muestreado para una correcta reconstrucción. Esta frecuencia es el doble del ancho de banda de la señal analógica.

50
BIBLIBIBLIBIBLIBIBLIOGRAFÍOGRAFÍOGRAFÍOGRAFÍAAAA
Ogata, Katsuhiko. Sistemas de Control en Tiempo Discreto. Segunda Edición. Prentice Hall, 1996.
Franklin, Gene F.; Powell, David J.; Workman, Micha el L.; Powell, Dave. Digital Control of Dynamic Systems. Addison-Wesley, 1997.
Paraskevopoulos, P. Digital Control Systems. Prentice-Hall,1996.
Kuo, Benjamin. Digital Control Systems (Second Edition). Hbj College & School Division,1995.
Vaccaro, Richard J. Digital Control: A State-Space Approach. McGraw-Hill, 1995.
Phillips, Ch. L.; Nagle, H. T. Digital Control System Analysis and Design. Prentice Hall International, 1994.
Houpis, Constantine; Lamont, Gary. Digital Control Systems: Theory, Hardware, Software. McGraw-Hill, 1991.
Leigh, J. R. Applied Digital Control: Theory, Design and Implementation. Prentice Hall International, 1984.
Related Documents











