Differential Equations 1 Introduction 1.1 Classification of Differential Equations Definition 1.1 (Differential Equations). An equation involving one dependent variable and its derivatives with respect to one or more independent variables is called a differential equation. Example 1.1. Following are examples of differential equations d 2 y dx 2 + xy dy dx 2 =0 (1.1) d 4 x dt 4 +5 d 2 x dt 2 +3x = sin t (1.2) x 2 d 2 y dx 2 + x dy dx +(x 2 - p 2 )y =0 (1.3) x 2 d 2 y dx 2 3 + x dy dx +(x 2 - p 2 )y =0. (1.4) Definition 1.2 (Ordinary Differential Equation). An ordinary differential equation (ODE) is one in which there is only one independent variable. From the definition of ordinary differential equation, it follows that all the derivatives occurring in it are ordinary derivatives. Definition 1.3 (Partial Differential Equation). A differential equation involving partial derivatives of the dependent variable with respect to more than one independent variable is called a partial differential equation. Example 1.2. The differential equations appearing in Example 1.1 are all instances of ordinary differential equations. The differential equation ∂v ∂s + ∂v ∂t = v is an example of a partial differential equation. Note 1. In these lectures we shall discuss only ordinary differential equations, and so the word ordinary will be dropped. Definition 1.4 (Order of the Differential Equation). The order of the highest ordered derivative involved in a differential equation is called the order of the differential equation. Example 1.3. In Example 1.1, the order of the differential equations (1.1), (1.2), (1.3) and (1.4) are respectively 2, 4, 2 and 2. 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Differential Equations
1 Introduction
1.1 Classification of Differential Equations
Definition 1.1 (Differential Equations). An equation involving one dependent variableand its derivatives with respect to one or more independent variables is called a differentialequation.
Example 1.1. Following are examples of differential equations
d2y
dx2+ xy
(dy
dx
)2
= 0 (1.1)
d4x
dt4+ 5
d2x
dt2+ 3x = sin t (1.2)
x2 d2y
dx2+ x
dy
dx+ (x2 − p2)y = 0 (1.3)
x2
(d2y
dx2
)3
+ xdy
dx+ (x2 − p2)y = 0. (1.4)
Definition 1.2 (Ordinary Differential Equation). An ordinary differential equation (ODE)is one in which there is only one independent variable.
From the definition of ordinary differential equation, it follows that all the derivativesoccurring in it are ordinary derivatives.
Definition 1.3 (Partial Differential Equation). A differential equation involving partialderivatives of the dependent variable with respect to more than one independent variableis called a partial differential equation.
Example 1.2. The differential equations appearing in Example 1.1 are all instances of
ordinary differential equations. The differential equation∂v
∂s+∂v
∂t= v is an example of a
partial differential equation.
Note 1. In these lectures we shall discuss only ordinary differential equations, and so theword ordinary will be dropped.
Definition 1.4 (Order of the Differential Equation). The order of the highest orderedderivative involved in a differential equation is called the order of the differential equation.
Example 1.3. In Example 1.1, the order of the differential equations (1.1), (1.2), (1.3)and (1.4) are respectively 2, 4, 2 and 2.
1

1 INTRODUCTION 2
Definition 1.5 (Degree of the Differential Equation). If a differential equation has theform of an algebraic equation of degree k in the highest derivative, then we say that thegiven differential equation is of degree k.
Example 1.4. In Example 1.1, the degree of the differential equations (1.1), (1.2), (1.3)and (1.4) are respectively 1, 1, 1 and 3.
Definition 1.6 (Linear and Nonlinear Ordinary Differential Equation). A linear ordinarydifferential equation of order n, in the dependent variable y and the independent variablex, is an equation that is in, or can be expressed in, the form
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = b(x),
where a0 is not identically zero.A nonlinear ordinary differential equation is an ordinary differential equation that is notlinear.
Example 1.5. In Example 1.1, the ordinary differential equations (1.2) and (1.3) arelinear, but (1.1) is not. Moreover, the following ordinary differential equations are allnonlinear:
d2y
dx2+ 5
dy
dx+ 6y2 = 0
d2y
dx2+ 5
(dy
dx
)2
+ 6y = 0
d2y
dx2+ 5y
dy
dx+ 6y = 0.
Definition 1.7 (Homogeneous and Nonhomogeneous Linear ODE). Consider a linearordinary differential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F (x). (1.5)
If the function F (x) is not identically zero, then (1.5) is called a linear nonhomogeneousODE ; otherwise equation is said to be linear homogeneous. Thus, a linear homogeneousODE is of the form
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0.
For a linear nonhomogeneous ODE
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F (x), (1.6)
the equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0
is called the homogeneous part of (1.6).If the functions a0(x), a1(x), . . . , an(x) are constants, then (1.5) is called linear ODE withconstant coefficients. Similarly, if the functions a0(x), a1(x), . . . , an(x) are constants andF (x) is zero, then (1.5) is called linear homogeneous ODE with constant coefficients.

1 INTRODUCTION 3
1.2 Solutions of Differential Equations
Consider the nth-order ordinary differential equation
F
[x, y,
dy
dx, . . . ,
dny
dxn
]= 0, (1.7)
where F is a real function of its (n+ 2) arguments x, y,dy
dx, . . . ,
dny
dxn.
Definition 1.8 (Implicit and Explicit Solutions).
1. Let f be a real function defined for all x in a real interval I1 and having an nthderivative (and hence also all lower ordered derivatives) for all x ∈ I. The functionf is called an explicit solution of the differential equation (1.7) on I if it fulfills thefollowing two requirements:
(a) F[x, f(x), f ′(x), . . . , f (n)(x)
]is defined for all x ∈ I, and
(b) F[x, f(x), f ′(x), . . . , f (n)(x)
]= 0 for all x ∈ I.
2. A relation g(x, y) = 0 is called an implicit solution of (1.7) if this relation defines atleast one real function f of the variable x on an interval I such that this function isan explicit solution of (1.7) on this interval.
3. Both explicit solutions and implicit solutions will usually be called simply solutions.
Example 1.6.
1. The function f defined for all real x by f(x) = 2 sinx+ 3 cosx is an explicit solution
of the differential equationd2y
dx2+ y = 0 for all real x (verify).
2. The function y(x) = x tan(x + 3) is an explicit solution of the differential equation
xdy
dx= x2 + y2 + y in I = (−π
2 − 3, π2 − 3) (verify).
Example 1.7. The relationx2 + y2 − 25 = 0 (1.8)
is an implicit solution of the differential equation
x+ ydy
dx= 0 (1.9)
on the interval I defined by −5 < x < 5. For the relation (1.8) defines the two realfunctions f1 and f2 given by f1(x) =
√25− x2, and f2(x) = −
√25− x2, respectively, for
all real x ∈ I, and both of these functions are explicit solutions of the differential equations(1.9) on I.
1Recall that an interval is a set of either of the following forms:
(a, b), (a, b], [a, b), [a, b], (a,∞), [a,∞), (−∞, b), (−∞, b], (−∞,∞),
where a, b ∈ R.

2 FIRST ORDER ORDINARY DIFFERENTIAL EQUATIONS 4
Example 1.8 (Formal Solution). Consider the relation
x2 + y2 + 25 = 0. (1.10)
Let us differentiate the relation (1.10) implicitly with respect to x. We obtain
2x+ 2ydy
dx= 0 or
dy
dx= −x
y.
Substituting this into the differential equation
x+ ydy
dx= 0, (1.11)
we obtain the formal identity
x+ y
(−xy
)= 0.
Thus the relation (1.10) formally satisfies the differential equation (1.11). Can we concludefrom this alone that (1.10) is an implicit solution of (1.11)? The answer to this questionis “no,” for we have no assurance from this that the relation (1.10) defines any functionthat is an explicit solution of (1.11) on any real interval I. All that we have shown is that(1.10) is a relation between x and y that, upon implicit differentiation and substitution,formally reduces the differential equation (1.11) to a formal identity. It is called a formalsolution.
2 First Order Ordinary Differential Equations
Consider the first order differential equation of the form
dy
dx= f(x, y), (2.1)
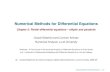
where f(x, y) is a continuous function throughout some rectangle R in the xy plane.The geometric meaning of a solution of (2.1) can be understood as follows (Fig. 1). IfP0 = (x0, y0) is a point in R, then the number(
dy
dx
)P0
= f(x0, y0)
determines a direction at P0. Now let P1 = (x1, y1) be a point near P0 in this direction,and use (
dy
dx
)P1
= f(x1, y1)
to determine a new direction at P1. Next, let P2 = (x2, y2) be a point near P1 in this newdirection, and use the number (
dy
dx
)P2
= f(x2, y2)
to determine yet another direction at P2. If we continue this process, we obtain a brokenline with points scattered along it like beads; if we now imagine that these successive points

2 FIRST ORDER ORDINARY DIFFERENTIAL EQUATIONS 5
Figure 1:
move closer to one another and become more numerous, then the broken line approachesa smooth curve through the initial point P0. This curve is a solution y = y(x) of equation(2.1); for at each point (x, y) on it, the slope is given by f(x, y) precisely the conditionrequired by the differential equation. If we start with a different initial point, then ingeneral we obtain a different curve (or solution). Thus the solutions of (2.1) form a familyof curves, called integral curves. Furthermore, it appears to be a reasonable guess thatthrough each point in R there passes just one integral curve of (2.1). This discussion isintended only to lend plausibility to the following precise statement.
Theorem 2.1 (Picard’s Theorem2). Let f(x, y) and∂f
∂ybe continuous functions on a
closed rectangle R : {(x, y) : a ≤ x ≤ b, c ≤ y ≤ d}. Then through each point (x0, y0) in
the interior of R there passes a unique integral curve of the equationdy
dx= f(x, y).
If we consider a fixed value of x0 in this theorem, then the integral curve that passesthrough (x0, y0) is fully determined by the choice of y0. In this way we see that the integralcurves of (2.1) constitute what is called a one-parameter family of curves. The equationof this family can be written in the form
y = y(x, c) (2.2)
where different choices of the parameter c yield different curves in the family. The integralcurve that passes through (x0, y0) corresponds to the value of c for which y0 = y(x0, c). If
2This theorem can be strengthened in various directions by weakening its hypotheses. We will discussit in Section 5.

2 FIRST ORDER ORDINARY DIFFERENTIAL EQUATIONS 6
we denote this number by c0, then (2.2) is called the general solution of (2.1), and
y = y(x, c0) (2.3)
is called the particular solution that satisfies the condition
y = y0 when x = x0.
The essential feature of the general solution (2.2) is that the constant c in it can bechosen so that an integral curve passes through any given point of the rectangle underconsideration.
Remark 2.1. As discussed above, the general solution of a first order ODE is a one-parameter family of infinitely many solution curves, one for each value of the parameter c.If we choose a specific c (e,g., c = 6.45 or 0 or 2.01) we obtain what is called a particularsolution of the ODE. A particular solution does not contain any arbitrary constants.We also note that a first order ODE may sometimes have an additional solution that cannot be obtained from the general solution by assigning a value to the parameter. Such a
solution is called singular solution. For instance,
(dy
dx
)2
−xdy
dx+ y = 0 has the general
solution y = cx − c2. It also has a solution ys(x) = x2
4 that cannot be obtained from thegeneral solution by choosing specific values of c. Hence, the later solution is a singularsolution.
Remark 2.2. We shall develop methods that will give general solutions uniquely (perhapsexcept for notation). Hence we shall say the general solution of a given ODE (instead ofa general solution).
2.1 Initial Value Problem
Definition 2.1 (Initial Value Problem). Consider the first-order differential equation
dy
dx= f(x, y) (2.4)
where f is a function of x and y in some domain3 D of the xy plane; and let (x0, y0) be apoint of D. The initial-value problem (IVP) associated with (2.4) is to find a solution φ ofthe differential equation (2.4), defined on some real interval containing x0, and satisfyingthe initial condition
φ(x0) = y0.
In the customary abbreviated notation, this initial-value problem may be written
dy
dx= f(x, y)
y(x0) = y0.
The condition y(x0) = y0 is called the supplementary condition of the IVP.
3A domain is an open, connected set. For those unfamiliar with such concepts, D may be regarded asthe interior of some simple closed curve in the plane.

2 FIRST ORDER ORDINARY DIFFERENTIAL EQUATIONS 7
Remark 2.3. For higher order ODE, the supplementary conditions are also applied onthe lower derivatives of the function. For example, the following is an instance of IVP forsecond order ODE:
d2y
dx2+ y = 0
y(0) = 0, y′(0) = 1.
Observe that in the IVPs, the supplementary conditions relate to one x value. If theconditions relate to two different x values, the problem is called a boundary-value problem.For instance, the following is an example of boundary value problems:
d2y
dx2+ y = 0
y(0) = 0, y(π
2) = 1.
Problem 2.1. Solve the initial-value problem
dy
dx= −x
y(2.5)
y(3) = 4 (2.6)
given that the differential equation (2.5) has a one-parameter family of solutions whichmay be written in the form
x2 + y2 = c2. (2.7)
Solution. The condition (2.6) means that we seek the solution of (2.5) such that y = 4 atx = 3. Thus the pair of values (3, 4) must satisfy the relation (2.7). Substituting x = 3and y = 4 into (2.7), we find 9 + 16 = c2, or c2 = 25. Now substituting this value of c2
into (2.7), we have x2 + y2 = 25. Solving this for y, we obtain y = ±√
25− x2.Obviously the positive sign must be chosen to give the value +4 at x = 3. Thus thefunction f defined by f(x) =
√25− x2, −5 < x < 5, is the solution of the problem. In
the usual abbreviated notation, we write this solution as y =√
25− x2.
Problem 2.2. Assuming that the differential equation
xdy
dx− 3y + 3 = 0 (2.8)
has a one-parameter family of solutions given by
y = 1 + cx3,
solve the initial-value problems consisting of the differential equation (2.8) and the initialconditions (a) y(0) = 0 (b) y(1) = 1, and (c) y(0) = 1.
Answer: No solution for (a), just one solution y(x) = 1 for (b), and infinite number ofsolutions y(x) = 1 + cx3 for (c).

3 SOLUTIONS OF FIRST ORDER EQUATIONS 8
3 Solutions of First Order Equations
The first-order differential equations to be studied in this section may be expressed ineither the derivative form
dy
dx= f(x, y) (3.1)
or the differential formM(x, y)dx+N(x, y)dy = 0. (3.2)
An equation in one of these forms may readily be written in the other form.
Remark 3.1. In the form (3.1) it is clear from the notation itself that y is regarded as thedependent variable and x as the independent one; but in the form (3.2) we may actuallyregard either variable as the dependent one and the other as the independent. However,in all differential equations of the form (3.2) in x and y, we shall regard y as dependentand x as independent, unless the contrary is specifically stated.
3.1 Exact Differential Equations
Definition 3.1 (Total Differential). Let F be a function of two real variables such thatF has continuous first partial derivatives in a domain D. The total differential dF of thefunction F is defined by the formula.
dF (x, y) =∂F (x, y)
∂xdx+
∂F (x, y)
∂ydy
for all (x, y) ∈ D.
Definition 3.2 (Exact Differential Equation). A first order ODE of the form
M(x, y)dx+N(x, y)dy = 0 (3.3)
is called an exact differential equation in a domain D if there exits a function F (x, y) suchthat
1. F has continuous first partial derivatives in the domain D, and
2.∂F (x, y)
∂x= M(x, y), and
∂F (x, y)
∂y= N(x, y) for all (x, y) ∈ D.
[So in this case, equation (3.3) can be written as dF (x, y) = 0. Also note that in this case,M and N will be continuous in D.]
Theorem 3.1 (Test for Exactness). Consider the differential equation
M(x, y)dx+N(x, y)dy = 0 (3.4)
where M and N have continuous first partial derivatives at all points (x, y) in a rectangulardomain R := {(x, y) : |x− x0| < a, |y − y0| < b}. Then (3.4) is exact in R if and only if
∂M
∂y=∂N
∂x
for all (x, y) ∈ R.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 9
Proof. First we assume that the equation (3.4) is exact in R, and we prove that for all
(x, y) ∈ R,∂M
∂y=∂N
∂x.
Since the equation (3.4) is exact in R, there exists a function F such that
∂F (x, y)
∂x= M(x, y) and
∂F (x, y)
∂y= N(x, y)
for all (x, y) ∈ D. Then
∂2F (x, y)
∂x∂y=∂M(x, y)
∂yand
∂2F (x, y)
∂y∂x=∂N(x, y)
∂x
for all (x, y) ∈ R. But, using the continuity of the first partial derivatives of M and N ,we have
∂2F (x, y)
∂x∂y=∂2F (x, y)
∂y∂x
and therefore∂M(x, y)
∂y=∂N(x, y)
∂x
for all (x, y) ∈ R.
Conversely, we assume that∂M
∂y=
∂N
∂xfor all (x, y) ∈ R, and we prove that the
equation (3.4) is exact in R. We note that since M and N have continuous first partialderivatives at all points (x, y) ∈ R, we obtain continuity of M and N in R. Thus, we justneed to prove that there exists a function F such that
∂F (x, y)
∂x= M(x, y) (3.5)
and∂F (x, y)
∂y= N(x, y). (3.6)
for all (x, y) ∈ R. Let us assume that F satisfies (3.5) and proceed. Then
F (x, y) =
∫M(x, y) ∂x+ φ(y), (3.7)
where∫M(x, y) ∂x indicates a partial integration with respect to x, holding y constant,
and φ is an arbitrary function of y only. Differentiating (3.7) partially with respect to y,we obtain
∂F (x, y)
∂y=
∂
∂y
∫M(x, y) ∂x+
dφ(y)
dy.
Now if (3.6) is to be satisfied, we must have
N(x, y) =∂
∂y
∫M(x, y) ∂x+
dφ(y)
dy, (3.8)
and hencedφ(y)
dy= N(x, y)− ∂
∂y
∫M(x, y) ∂x.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 10
Since φ is a function of y only, the derivativedφ(y)
dymust also be independent of x. That
is, in order for (3.8) to hold,
N(x, y)− ∂
∂y
∫M(x, y) ∂x (3.9)
must be independent of x. We will prove it by showing that
∂
∂x
[N(x, y)− ∂
∂y
∫M(x, y) ∂x
]= 0
for all (x, y) ∈ R. In fact,
∂
∂x
[N(x, y)− ∂
∂y
∫M(x, y) ∂x
]=
∂N(x, y)
∂x− ∂2
∂x∂y
∫M(x, y) ∂x
=∂N(x, y)
∂x− ∂2F (x, y)
∂x∂y(assuming (3.5))
=∂N(x, y)
∂x− ∂2F (x, y)
∂y∂x
=∂N(x, y)
∂x− ∂2
∂y∂x
∫M(x, y) ∂x
=∂N(x, y)
∂x− ∂M(x, y)
∂y
= 0 for all (x, y) ∈ R.
Thus, we have shown that (3.9) is independent of x. Thus we may write
φ(y) =
∫ [N(x, y)− ∂
∂y
∫M(x, y) ∂x
]dy.
Substituting this into Equation (3.7), we have
F (x, y) =
∫M(x, y) ∂x+
∫ [N(x, y)− ∂
∂y
∫M(x, y) ∂x
]dy.
This F (x, ) thus satisfies both (3.5) and (3.6) for all (x, y) ∈ R, and so Mdx+Ndy = 0 isexact in D.
Example 3.1. Consider the equation
y2dx+ 2xydy = 0.
Here M = y2, N = 2xy. Since∂M
∂y= 2y =
∂N
∂xfor all (x, y), the equation is exact in
every rectangular domain D.
Example 3.2. Consider the equation
ydx+ 2xdy = 0
Here M = y, N = 2x,∂M
∂y= 1 6= 2 =
∂N
∂xfor all (x, y). Thus Equation is not exact in
any rectangular domain D.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 11
Theorem 3.2 (Solution of Exact Equations). Consider the exact differential equation
M(x, y)dx+N(x, y)dy = 0 (3.10)
in a rectangular domain R := {(x, y) : |x − x0| < a, |y − y0| < b}. Then a one-parameterfamily of solutions of this differential equation is given by
F (x, y) = c,
where c is an arbitrary constant, and F is a function such that
∂F (x, y)
∂x= M(x, y), and
∂F (x, y)
∂y= N(x, y) (3.11)
for all (x, y) ∈ R.
Proof. Since∂F (x, y)
∂x= M(x, y), and
∂F (x, y)
∂y= N(x, y),
the equation can be written as
∂F (x, y)
∂xdx+
∂F (x, y)
∂ydy = 0,
or simplydF (x, y) = 0.
The relation F (x, y) = c is obviously a solution of this, where c is an arbitrary constant.
Remark 3.2. Note that from the definition of exact differential equation, existence of aF (x, y) satisfying (3.11) is guaranteed.
Problem 3.1. Solve the equation
(3x2 + 4xy)dx+ (2x2 + 2y)dy = 0
Solution. Here, M = 3x2 + 4xy, N = 2x2 + 2y,∂M
∂y= 4x =
∂N
∂x.
Since∂M
∂y=∂N
∂xfor all real (x, y), the equation is exact in every rectangular domain D.
Thus we must have a F (x, y) such that
∂F (x, y)
∂x= M(x, y) (3.12)
∂F (x, y)
∂y= N(x, y) (3.13)
From (3.12), we obtain
F (x, y) =
∫M(x, y)∂x+ φ(y)
=
∫(3x2 + 4xy)∂x+ φ(y)
= x3 + 2x2y + φ(y).

3 SOLUTIONS OF FIRST ORDER EQUATIONS 12
Therefore,∂F (x, y)
∂y= 2x2 +
dφ(y)
dy, and hence using (3.13), we obtain
2x2 +dφ(y)
dy= 2x2 + 2y
⇒ dφ(y)
dy= 2y
⇒ φ(y) = y2 + C1, where C1 is an arbitrary constant.
Thus, F (x, y) = x3 + 2x2y + y2 + C1.Hence a one-parameter family of solution is F (x, y) = C2 or x3 + 2x2y + y2 + C1 = C2.Taking C2 − C1 = C, we obtain a solution as,
x3 + 2x2y + y2 = C.
Problem 3.2. Solve the equation
(2x+ sinx tan y)dx− (cosx sec2 y)dy = 0
Solution. Here, M = 2x+ sinx tan y, N = − cosx sec2 y,∂M
∂y= sinx sec2 y =
∂N
∂x.
Since∂M
∂y=∂N
∂xfor all real (x, y), the equation is exact in every rectangular domain D.
Thus we must have a F (x, y) such that
∂F (x, y)
∂x= M(x, y) (3.14)
∂F (x, y)
∂y= N(x, y) (3.15)
From (3.14), we obtain
F (x, y) =
∫M(x, y)∂x+ φ(y)
=
∫(2x+ sinx tan y)∂x+ φ(y)
= x2 − cosx tan y + φ(y).
Therefore,∂F (x, y)
∂y= − cosx sec2 y +
dφ(y)
dy, and hence using (3.15), we obtain
− cosx sec2 y +dφ(y)
dy= − cosx sec2 y
⇒ dφ(y)
dy= 0
⇒ φ(y) = C0, where C0 is an arbitrary constant.
Thus, F (x, y) = x2 − cosx tan y + C0.Hence a one-parameter family of solution is F (x, y) = C1 or x2 − cosx tan y + C0 = C1.Taking C1 − C0 = C, we obtain a solution as,
x2 − cosx tan y = C.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 13
3.2 Reduction to Exact Equations: Integrating Factors
Consider the differential equation
ydx+ 2xdy = 0.
One can easily verify that this equation is not exact. However, if we multiply this equationby y, then the resultant equation
y2dx+ 2xydy = 0
is exact. Thus, we have the following definition.
Definition 3.3 (Integrating Factor). If the differential equation
M(x, y)dx+N(x, y)dy = 0 (3.16)
is not exact in a domain D but the differential equation
µ(x, y)M(x, y)dx+ µ(x, y)N(x, y)dy = 0
is exact in D, then µ(x, y) is called an integrating factor of the differential equation.
Remark 3.3. If an equation M(x, y)dx + N(x, y)dy = 0 has an integrating factor, thenit has infinitely many integrating factors. In fact, if µ is an integrating factor, then kµ isalso an integrating factor, where k is a constant.
Remark 3.4. Multiplication of a nonexact differential equation by an integrating factorthus transforms the nonexact equation into an exact one. This exact equation has the sameone-parameter family of solutions as the nonexact original. However, the multiplicationof the original equation by the integrating factor may result in either
1. the loss of (one or more) solutions of the original
2. the gain of (one or more) functions which are solutions of the “new” equation butnot of the original,
3. both of these phenomena.
Hence, whenever we transform a nonexact equation into an exact one by multiplication byan integrating factor, we should check carefully to determine whether any solutions mayhave been lost or gained.
3.2.1 Methods to Find Integrating Factors
Theorem 3.3. If (3.16) is such that
1
N
(∂M
∂y− ∂N
∂x
)is a function of x alone, say f(x), then
µ = e∫f dx
is a function of x only and is an integrating factor for (3.16).

3 SOLUTIONS OF FIRST ORDER EQUATIONS 14
Proof. Need to show that the equation
e∫f dxM(x, y)dx+ e
∫f dxN(x, y)dy = 0
is exact. Complete the proof.
Theorem 3.4. If (3.16) is such that
−1
M
(∂M
∂y− ∂N
∂x
)is a function of y alone, say g(y), then
µ = e∫g dy
is a function of y only and is an integrating factor for (3.16).
Problem 3.3. Solve (xy − 1)dx+ (x2 − xy)dy = 0.
Solution. Here M = xy − 1, N = x2 − xy,∂M
∂y= x, and
∂N
∂x= 2x− y.
Since∂M
∂y6= ∂N
∂x, given equation is not exact. But
1
N
(∂M
∂y− ∂N
∂x
)=
1
x2 − xy(y − x) = −1
x,
and hence e∫
(− 1xdx) = 1
x is an integrating factor. Multiplying by 1x , we obtain exact
equation
(y − 1
x)dx+ (x− y)dy = 0. (3.17)
Now we can solve the exact equation (3.17) following the method given in Section 3.1.But here we proceed as follows.
(y − 1
x)dx+ (x− y)dy = 0
⇒ (ydx− xdy)− (1
xdx+ ydy) = 0
⇒ d(xy)− d(lnx+y2
2) = 0
⇒ d(xy − lnx− y2
2) = 0
⇒ xy − lnx− y2
2= c.
Remark 3.5. Sometimes it may be possible to find integrating factor by inspection. Forthis, some known differential formulas are useful. Few of these are given below:

3 SOLUTIONS OF FIRST ORDER EQUATIONS 15
d
(x
y
)=
ydx− xdyy2
d(yx
)=
xdy − ydxx2
d (xy) = xdy + ydx
d
(lnx
y
)=
ydx− xdyxy
Problem 3.4. Solve (2x2y + y)dx+ xdy = 0
Solution. Obviously, we can write this as
(2x2ydx+ (ydx+ xdy) = 0
⇒ 2x2ydx+ d(xy) = 0
Now if we divide this by xy, then the last term remains differential and the first term alsobecomes differential:
2xdx+d(xy)
xy= 0
⇒ d(x2 ln(xy)) = 0
⇒ x2 + ln(xy) = C
⇒ y =1
xeC−x
2
In multiplying by the integrating factor 1xy , we assumed that x 6= 0 and y 6= 0. We now
consider the solution y = 0. This is not a member of the one-parameter family of solutionswhich we obtained. However, writing the original differential equation of the problem inthe derivative form
(2x2y + y) + xdy
dx= 0,
it is obvious that y = 0 is a solution of the original equation. Therefore, the solutions ofthe differential equation are
y =1
xeC−x
2(general solution)
y = 0 (singular solution).
Problem 3.5. Solve ydx+ (x2y − x)dy = 0.
Solution.
ydx+ (x2y − x)dy = 0
⇒ x2ydy − (xdy − ydx) = 0. (3.18)
The quantity in parentheses reminds the differential formula
d(yx
)=xdy − ydx
x2

3 SOLUTIONS OF FIRST ORDER EQUATIONS 16
which suggests the integrating factor 1x2
. Multiplying (3.18) by integrating factor 1x2
, weobtain
ydy −(xdy − ydx
x2
)= 0
⇒ ydy − d(yx
)= 0.
Therefore, general solution is1
2y2 − y
x= c.
3.3 Separable Equations
Definition 3.4 (Seperable Equation). An equation of the form
F (x)G(y)dx+ f(x)g(y)dy = 0 (3.19)
is called a separable equation.
A separable equation may not be exact, but we have the following theorem.
Theorem 3.5. A non-exact separable equation (3.19) has an integrating factor
1
G(y)f(x).
Moreover, a one-parameter family of solutions is given by∫F (x)
f(x)dx+
∫g(y)
G(y)dy = C.
Proof. Obvious.
Remark 3.6. Since we obtained the separated exact equation from the nonexact equation(3.19) by multiplying (3.19) by the integrating factor 1
G(y)f(x) , solutions may have been lost
or gained in this process (cf. Remark 3.4). We now consider this more carefully. Note thatwe divide the original equation by the integrating factor 1
G(y)f(x) under the assumption
that neither f(x) nor G(y) is zero, and under this assumption, we proceeded to obtain theone-parameter family of solutions. Now, we should investigate the possible loss or gain ofsolutions that may have occurred in this formal process. In particular, regarding y as thedependent variable as usual, we consider the situation that occurs if G(y) is zero. Writingthe original differential equation (3.19) in the derivative form
f(x)g(y)dy
dx+ F (x)G(y) = 0,
we immediately note that if y0 is any real number such that G(y0) = 0, then y = y0 is a(constant) solution of the original differential equation. Thus we must find the solutionsy = y0 of the equation G(y) = 0 and determine whether any of these are solutions of theoriginal equation which were lost in the formal separation process.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 17
Problem 3.6. Solve
xdy
dx= y + y2.
Solution. Given equation is(y + y2)dx− xdy = 0.
The equation is separable, and 1x(y+y2)
is an integrating factor. Multiplying by integrating
factor 1x(y+y2)
(assuming x(y + y2) 6= 0), we obtain
1
xdx−
(1
y + y2
)dy = 0
⇒ 1
xdx−
(1
y− 1
1 + y
)dy = 0
⇒∫
1
xdx−
∫ (1
y− 1
1 + y
)dy = c, c is an arbitrary constant
⇒ ln |x| − (ln |y| − ln |1 + y|) = c
⇒ ln |x| − (ln |y| − ln |1 + y|) = c
⇒ ln
∣∣∣∣x(1 + y)
y
∣∣∣∣ = c.
Thus, we have the one-parameter family of solutions
ln
∣∣∣∣x(1 + y)
y
∣∣∣∣ = c.
In multiplying by the integrating factor 1x(y+y2)
in the separation process, we assumed that
x 6= 0 and (y + y2) 6= 0. We now consider the solution y = 0, and y = −1 of (y + y2) = 0.These are not a member of the one-parameter family of solutions which we obtained.However, writing the original differential equation of the problem in the derivative form
(y + y2)− xdy
dx= 0,
it is obvious that y = 0, and y = −1 are solutions of the original equation. We concludethat these are solutions which were lost in the separation process. Therefore, the solutionsof the differential equation are
ln
∣∣∣∣x(1 + y)
y
∣∣∣∣ = c (general solution)
y = 0 (singular solution)
y = −1 (singular solution).
Problem 3.7. Solve xy3dx+ (y + 1)e−xdy = 0.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 18
Solution. The equation is separable, and 1y3e−x is an integrating factor. Multiplying by
integrating factor 1y3e−x (assuming y3 6= 0), we obtain
x
e−xdx+
y + 1
y3dy = 0
⇒ xexdx+
(1
y2+
1
y3
)dy = 0
⇒∫xexdx+
∫ (1
y2+
1
y3dy
)dy = c
⇒ (x− 1)ex −(
1
y+
1
2y2
)= c
⇒ (x− 1)ex =
(1
y+
1
2y2
)+ c.
We obtain this general solution under the assumption that y3 6= 0, that is y 6= 0. However,writing the original differential equation of the problem in the derivative form
dy
dx= − xy3
(y + 1)e−x,
it is obvious that y = 0 is a solution of the original equation, but it cannot be obtainedfrom the general solution for any value of the constant c. Therefore, the solutions of thedifferential equation are
(x− 1)ex =
(1
y+
1
2y2
)+ c (general solution)
y = 0 (singular solution).
3.4 Reduction to Separable Equations
3.4.1 Homogeneous Equations
Definition 3.5 (Homogeneous Equation). The first-order differential equationM(x, y)dx+N(x, y)dy = 0 is said to be homogeneous if it can be written in the derivative form asdy
dx= f
(yx
).
Example 3.3. The equation
(y +√x2 + y2)dx− xdy = 0
is homogeneous as it can be written as
dy
dx=
(y +
√x2 + y2
)x
=y
x±√x2 + y2
√x2
=y
x±√
1 +(yx
)2

3 SOLUTIONS OF FIRST ORDER EQUATIONS 19
Remark 3.7 (Test For Homogeneous Equation).
1. A function F (x, y) is called homogeneous of degree n if F (tx, ty) = tnF (x, y).
2. If M(x, y) and N(x, y) in the differential equation M(x, y)dx + N(x, y)dy = 0 areboth homogeneous of the same degree n, then the differential equation is homoge-neous.
Example 3.4. Consider the equation
(y +√x2 + y2)dx− xdy = 0
of Example 3.3. Here M(x, y) = y+√x2 + y2, and N(x, y) = −x. Note that M(tx, ty) =
ty+√
(tx)2 + (ty)2 = t(y+√x2 + y2) = tM(x, y), and N(tx, ty) = −tx = tN(x, y). Thus,
both M and N are homogeneous of the same degree 1, and hence the differential equationis homogeneous.
Theorem 3.6. IfM(x, y)dx+N(x, y)dy = 0 (3.20)
is a homogeneous equation, then the change of variables
v =y
x
transforms (3.20) into a separable equation in the variables v and x.
Proof. Since M(x, y)dx+N(x, y)dy = 0 is homogeneous, it may be written in the form
dy
dx= f
(yx
). (3.21)
Let y = vx. Thendy
dx= v + x
dv
dx
and (3.21) becomes
v + xdv
dx= f(v)
or[v − f(v)]dx+ xdv = 0.
This equation is separable.
Problem 3.8. Solvedy
dx+x
y+ 2 = 0, y 6= 0, y(0) = 1.
Solution.
dy
dx+x
y+ 2 = 0
⇒ dy
dx= −x+ 2y
y
⇒ dy
dx= −x
y− 2.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 20
Therefore, given equation is homogeneous. Substituting v = yx , we obtain
dy
dx= v + x
dv
dx,
and the given equation reduces to
v + xdv
dx= −1
v− 2
⇒ (v +1
v+ 2)dx+ xdv = 0
⇒ (v +1
v+ 2)dx+ xdv = 0
⇒ (v + 1)2
vdx+ xdv = 0
⇒ 1
xdx+
v
(v + 1)2dv = 0
(multiplying by the integrating factor vx(v+1)2
, assuming x(v + 1)2 6= 0 )
⇒ 1
xdx+
[1
(v + 1)− 1
(v + 1)2
]dv = 0
⇒∫
1
xdx+
∫ [1
(v + 1)− 1
(v + 1)2
]dv = C, where C is an arbitrary constant
⇒ ln |x|+ ln |v + 1|+ 1
v + 1= C
⇒ ln |x|+ ln∣∣∣yx
+ 1∣∣∣+
1yx + 1
= C (substituting back v = yx)
⇒ ln |y + x|+ 1yx + 1
= C
⇒ ln |y + x|+ x
y + x= C
Therefore, general solution of the given differential equation is given by
ln |y + x|+ x
y + x= C.
We obtain this general solution under the assumption that (v + 1)2 6= 0, that is y 6= −x.
Note that y = −x is a solution of the given equation as in this casedy
dx= −1, and x
y+2 = 1.
This solution cannot be obtained from the general solution for any value of the constantC. Therefore, the solutions of the differential equation are
ln |y + x|+ x
y + x= C (general solution)
y = −x (singular solution).
Now using the initial condition y(0) = 1 in the general solution, we obtain
ln 1 + 0 = C
⇒ C = 0.
Hence solution of the given IVP is ln |y+ x|+ xy+x = 0. Also note that since y = −x does
not satisfy the initial condition y(0) = 1, y = −x is NOT a solution of the given IVP.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 21
Problem 3.9. Solvedy
dx+x
y+ 2 = 0, y 6= 0, y(1) = −1.
Solution. As shown above, solutions of the given equation are
ln |y + x|+ x
y + x= C (general solution)
y = −x (singular solution).
Note that general solution does not satisfy the condition y(1) = −1 for any value of theconstant C. Moreover, the singular solution y = −x satisfies this condition. Therefore,the solution of the given IVP is y = −x.
Problem 3.10. Solve
xydy
dx= y2 + 2x2, y(1) = 2.
Solution.
xydy
dx= y2 + 2x2
⇒ dy
dx=y2 + 2x2
xy(assuming x 6= 0, y 6= 0)
⇒ dy
dx=
( yx
)2+ 2
yx
Given equation is homogeneous. Substituting v = yx , we obtain
dy
dx= v + x
dv
dx, and the
given equation becomes
v + xdv
dx=v2 + 2
v
⇒[v − v2 + 2
v
]dx+ xdv = 0
⇒ −2
vdx+ xdv = 0
⇒ −2
xdx+ vdv = 0
(multiplying by the integrating factor vx , assuming x 6= 0)
⇒ vdv =2
xdx
⇒∫vdv =
∫2
xdx+ C, where C is an arbitrary constant
⇒ v2
2= lnx2 + C
⇒ y2
2x2= lnx2 + C (substituting back v = y
x)
⇒ y2 = 2x2(lnx2 + C).

3 SOLUTIONS OF FIRST ORDER EQUATIONS 22
Therefore, general solution of the given differential equation is given by
y2 = 2x2(lnx2 + C).
Now initial condition y(1) = 2 gives
4 = 2(ln 1 + C)
⇒ C = 2.
Hence solution of the given IVP is y2 = 2x2(lnx2 + 2).
3.4.2 Substitution Method
Theorem 3.7. Consider the ODE
dy
dx= F (ax+ by + c), (3.22)
where b 6= 0. Then the change of variables
v = ax+ by + c
transforms (3.22) into a separable equation in the variables v and x.
Remark 3.8. If b = 0, then (3.22) is already in separable form.
Problem 3.11. Solvedy
dx= (x+ y)2.
Solution. Let x+ y = v. Thendy
dx=
dv
dx− 1,
and thus given equation reduces to
dv
dx= 1 + v2
⇒∫
1
1 + v2dv =
∫dx+ c (∵ v2 + 1 6= 0)
⇒ tan−1 v = x+ c
⇒ v = tan(x+ c)
⇒ x+ y = tan(x+ c).
Theorem 3.8. Consider the differential equation of the form
dy
dx=
ax+ by + c
αx+ βy + γ, ab 6= 0, αβ 6= 0. (3.23)
1. Let aα 6=
bβ , that is the lines ax + by + c = 0, and αx + βy + γ = 0 intersects, say,
at the point (h, k). Then the substitution X = x− h, and Y = y − k transforms theequation (3.23) to a homogeneous equation.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 23
2. Let aα = b
β , that is the lines ax+ by+ c = 0, and αx+ βy+ γ = 0 are parallel. Thenthe substitution v = ax+ by transforms the equation (3.23) to a separable equation.
Problem 3.12. Solvedy
dx=
2x− y + 1
x− 2y + 1, x− 2y + 1 6= 0.
Solution. The given equation is not homogeneous. The point of intersection of the lines2x − y + 1 = 0, and x − 2y + 1 = 0 is (−1
3 ,13). Let X = x + 1
3 , and Y = y − 13 . Then
dy
dx=
dY
dX. Therefore, under this substitution, given equation reduces to
dY
dX=
2X − YX − 2Y
⇒ dY
dX=
2− YX
1− 2 YX,
which is a homogeneous equation. Substituting v = YX , we obtain
dY
dX= v + X
dv
dX, and
the given equation reduces to
v +Xdv
dX=v2 + 2
v
⇒ −2(v2 − v + 1)
1− 2vdX +Xdv = 0
⇒ − 2
XdX +
1− 2v
(v2 − v + 1)dv = 0
(multiplying by the integrating factor 1−2vX(v2−v+1)
as v2 − v + 1 6= 0)
⇒ −∫
2
XdX +
∫1− 2v
(v2 − v + 1)dv = C1, where C1 is an arbitrary constant
⇒ −2 ln |X| − ln |v2 − v + 1| = C1
⇒ lnX2 + ln |v2 − v + 1| = C2, where C2 = −C1
⇒ ln |X2(v2 − v + 1)| = C2
⇒ ln
∣∣∣∣X2
(Y 2
X2− Y
X+ 1
)∣∣∣∣ = C2
⇒ ln∣∣Y 2 −XY +X2
∣∣ = C2
⇒∣∣Y 2 −XY +X2
∣∣ = C3, where C3 = eC2
⇒ Y 2 −XY +X2 = C3 (∵ Y 2 −XY +X2 ≥ 0)
⇒ (y − 1
3)2 − (x+
1
3)(y − 1
3) + (x+
1
3)2 = C3.
Problem 3.13. Solvedy
dx=
x− y + 5
2x− 2y − 2, x− y − 1 6= 0.
Solution. The given equation is not homogeneous. Moreover, the lines x − y + 5 = 0,and 2x − 2y − 2 = 0 are parallel. Therefore, we use the transformation v = x − y. Then

3 SOLUTIONS OF FIRST ORDER EQUATIONS 24
dy
dx= 1− dv
dx. Therefore, given equation becomes
1− dv
dx=
v + 5
2v − 2
⇒ dv
dx= 1− v + 5
2v − 2
⇒ dv
dx=
v − 7
2(v − 1)
⇒ v − 1
v − 7dv =
1
2dx
(multiplying by the integrating factor (v−1)v−7 , assuming v − 7 6= 0)
⇒[1 +
6
v − 7
]dv =
1
2dx
⇒∫ [
1 +6
v − 7
]dv =
∫1
2dx+ C
⇒ v + 6 ln |v − 7| = x
2+ C
⇒ (x− y) + 6 ln |x− y − 7| = x
2+ C
⇒ x
2− y + 6 ln |x− y − 7| = C.
Therefore, the general solution is
x
2− y + 6 ln |x− y − 7| = C (3.24)
We obtain this general solution under the assumption that v−7 6= 0, that is x−y−7 6= 0.
Note that x − y − 7 = 0 is a solution of the given equation as in this casedy
dx= 1, and
x−y+52x−2y−2 = 7+5
14−2 = 1. This solution cannot be obtained from the general solution (3.24)for any value of the constant C. Therefore, the solutions of the differential equation are
x
2− y + 6 ln |x− y − 7| = C (general solution)
y − x = 7 (singular solution).
Theorem 3.9. An ODE of the form
dy
dx=y
x+ g(x)h
(yx
)can be reduced to the separable form by substituting v = y
x .
3.5 Linear Differential Equations
Definition 3.6 (First Order Linear Differential Equation). A first-order ordinary differ-ential equation is linear in the dependent variable y and the independent variable x if itis, or can be, written in the form
a0(x)dy
dx+ a1(x)y = b(x),

3 SOLUTIONS OF FIRST ORDER EQUATIONS 25
where a0 is not identically zero.
A first-order ordinary differential equation can be put in the form
dy
dx+ P (x)y = Q(x).
which is called the standard form.
Example 3.5. The equation
xdy
dx+ (x+ 1)y = x3
is a first-order linear differential equation. The standard form of this differential equationis
dy
dx+
(1 +
1
x
)y = x2.
Theorem 3.10. The linear differential equation
dy
dx+ P (x)y = Q(x). (3.25)
has an integrating factor of the form
e∫P (x) dx.
A one-parameter family of solutions of this equation is
ye∫P (x) dx =
∫e∫P (x) dxQ(x) dx+ C,
that is
y = e−∫P (x) dx
[∫e∫P (x) dxQ(x) dx+ C
]. (3.26)
Proof. Linear equation (3.25) can be written as
(P (x)y −Q(x))dx+ dy = 0 (3.27)
Here M = P (x)y −Q(x) and N = 1. Now
1
N
(∂M
∂y− ∂N
∂x
)= P (x).
Hence, µ(x) = e∫P (x) dx is an integrating factor. Multiplying equation (3.27) by µ(x) =
e∫P (x) dx, we obtain
e∫P (x) dxP (x)ydx−Q(x)e
∫P (x) dxdx+ e
∫P (x) dxdy = 0
⇒ d(ye∫P (x) dx
)= Q(x)e
∫P (x) dxdx
⇒∫d(ye∫P (x) dx
)=
∫Q(x)e
∫P (x) dxdx+ C
⇒ ye∫P (x) dx =
∫Q(x)e
∫P (x) dxdx+ C
⇒ y = e−∫P (x) dx
[∫e∫P (x) dxQ(x) dx+ C
].

3 SOLUTIONS OF FIRST ORDER EQUATIONS 26
Remark 3.9. It can be shown that the one-parameter family of solutions (3.26) of thelinear equation (3.25) includes all solutions of (3.25).
Method:
1. Put in standard linear formdy
dx+ P (x)y = Q(x).
2. Find integrating factor u(x) = e∫P (x) dx.
3. Multiply both sides by e∫P (x) dx, and put the resultant equation in the form
d
dx
[ye∫P (x) dx
]= e
∫P (x) dxQ(x)
4. Integrate.
Example 3.6. Solve xdy
dx− y = x3.
Solution.
1. Given equation in standard linear form isdy
dx− 1
xy = x2.
2. Integrating factor is u(x) = e∫ −1
xdx = 1
x .
3. Multiplying both sides of the equation by 1x , we obtain
1
x
dy
dx− 1
x2y = x
⇒ d
dx
(yx
)= x.
4. Integrating
y
x=
∫x dx+ C
⇒ y
x=x2
2+ C
⇒ y =x3
2+ Cx.
Example 3.7. Solve (1 + cosx)dy
dx− sinxy = 2x.
Solution.
1. Given equation in standard linear form isdy
dx− sinx
1 + cosxy =
2x
1 + cosx.
2. Integrating factor is u(x) = e∫− sin x
1+cos xdx = 1 + cosx.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 27
3. Multiplying both sides of the equation by 1 + cosx, we obtain
(1 + cosx)dy
dx− sinxy = 2x
⇒ d
dx
[(1 + cosx)y
]= 2x.
4. Integrating
(1 + cosx)y =
∫2x dx+ C
⇒ (1 + cosx)y = x2 + C.
Example 3.8. Solvedy
dx+ 2xy = 2x.
Solution. Integrating factor is e∫
2x dx = ex2. Hence,
yex2
=
∫2xex
2dx+ C
= ex2
+ C
⇒ y = 1 + Ce−x2.
Remark 3.10. As mentioned in Remark 3.1, in the differential equation M(x, y)dx +N(x, y)dy = 0, we may regard either variable as the dependent one and the other as theindependent, and we usually treat y as dependent and x as independent. In trying to solvefirst order ODE, it is sometimes helpful to reverse the role of x and y, and work on theresulting equations. Hence, the resulting equation
dx
dy+ P (y)x = Q(y)
is also a linear equation.
Problem 3.14. Solve (4y3 − 2xy)dy
dx= y2, y(2) = 1.
Solution. We write the given equation as
dx
dy+
2
yx = 4y.
An integrating factor is given by e∫
2ydy
= y2. Therefore,
xy2 =
∫4y3 dy + C
= y4 + C.
Using the initial condition y(2) = 1, we obtain C = 2 − 1 = 1. Therefore we obtainsolution as
xy2 = y4 + 1.

3 SOLUTIONS OF FIRST ORDER EQUATIONS 28
3.5.1 Bernoulli’s Equation
Definition 3.7. An equation of the form
dy
dx+ P (x)y = Q(x)yα,
where α is a real number, is called a Bernoulli differential equation.
if α = 0 or 1, then the Bernoulli equation is actually a linear equation. The followingtheorem gives a method of solution in the general case.
Theorem 3.11. Suppose α 6= 0, and α 6= 1. Then the transformation v = y1−α reducesthe Bernoulli equation
dy
dx+ P (x)y = Q(x)yα, (3.28)
to a linear equation in v.
Proof. We first multiply Equation (3.28) by y−α, thereby expressing it in the equivalentform
y−αdy
dx+ P (x)y1−α = Q(x). (3.29)
If we let v = y1−α, thendv
dx= (1− α)y−α
dy
dx
and Equation (3.29) transforms into
1
1− αdv
dx+ P (x)v = Q(x)
or, equivalently,dv
dx+ (1− α)P (x)v = (1− α)Q(x).
LettingP1(x) = (1− α)P (x) and Q1(x) = (1− α)Q(x)
this may be writtendv
dx+ P1(x)v = Q1(x)
which is linear in v.
Problem 3.15. Solvedy
dx− y
x= y3.
Solution. We first multiply the given equation by y−3 (assuming y 6= 0), to obtain
y−3 dy
dx− y−2
x= 1. (3.30)
If v = y−2, then we obtaindv
dx= −2y−3 dy
dx.

4 FAMILIES OF CURVES AND ORTHOGONAL TRAJECTORIES 29
Substituting in (3.30), we obtain
−1
2
dv
dx− v
x= 1
⇒ dv
dx+
2
xv = −2.
An integrating factor of this linear equation is given by e∫
2xdx = x2.
Thus, we obtain
vx2 = −2
∫x2 dx+ C0
⇒ y−2x2 = −2x3
3+ C0
⇒ 3x2
y2+ 2x3 = C (C = 3C0)
We obtain this general solution under the assumption that y 6= 0. Note that y = 0 isa solution of the given equation and this solution cannot be obtained from the generalsolution for any value of the constant C. Therefore, the solutions of the differentialequation are
3x2
y2+ 2x3 = C (general solution)
y = 0 (singular solution).
4 Families of Curves and Orthogonal Trajectories
4.1 Families of Curves and Corresponding Differential Equations
We have seen that the general solution of a first order differential equation normallycontains one arbitrary constant, called a parameter. When this parameter is assignedvarious values, we obtain a one-parameter family of curves. Each of these curves is aparticular solution, or integral curve, of the given differential equation, and all of themtogether constitute its general solution.Conversely, the curves of any one-parameter family are integral curves of some first orderdifferential equation. If the family is
f(x, y, c) = 0, (4.1)
then its differential equation can be found by the following steps.
Step 1: Differentiate (4.1) implicitly with respect to x to get a relation of the form
g
(x, y,
dy
dx, c
)= 0. (4.2)

4 FAMILIES OF CURVES AND ORTHOGONAL TRAJECTORIES 30
Step 2: Eliminate the parameter c from (4.1) and (4.2) to obtain
F
(x, y,
dy
dx
)= 0
as the desired differential equation.
Problem 4.1. Consider a one-parameter family of curves
x2 + y2 = c2. (4.3)
Determine a differential equation F
(x, y,
dy
dx
)= 0 such that curves of the family (4.3)
are integral curves of the differential equation.
Solution.
Step 1: Differentiating (4.3) with respect to x, we obtain
2x+ 2ydy
dx= 0. (4.4)
Step 2: Since c is already absent, there is no need to eliminate it and
x+ ydy
dx= 0 (4.5)
is the differential equation of the given family of circles.
Problem 4.2. Consider a one-parameter family of curves
x2 + y2 = 2cx. (4.6)
Determine a differential equation F
(x, y,
dy
dx
)= 0 such that curves of the family (4.6)
are integral curves of the differential equation.
Solution.
Step 1: Differentiating (4.6) with respect to x, we obtain
2x+ 2ydy
dx= 2c
⇒ x+ ydy
dx= c (4.7)
Step 2: Eliminating c from (4.6) and (4.7), we obtain
x+ ydy
dx=x2 + y2
2x
⇒ dy
dx=y2 − x2
2xy.
Thus,dy
dx=y2 − x2
2xy
is the differential equation of the given family of curves.

4 FAMILIES OF CURVES AND ORTHOGONAL TRAJECTORIES 31
4.2 Orthogonal Trajectories
Definition 4.1 (Orthogonal Trajectories). Let
F (x, y, c) = 0 (4.8)
be a given one-parameter family of curves in the xy plane. A curve that intersects thecurves of the family (4.8) at right angles is called an orthogonal trajectory of the givenfamily.If we have two families of curves such that each curve in either family is orthogonal to everycurve in the other family, then each family of curves is said to be a family of orthogonaltrajectories of the other.
Figure 2:
Example 4.1. Consider the family of circles
x2 + y2 = c2 (4.9)
with center at the origin and radius c (cf. Figure 2). The family of circles represented by(4.9) and the family y = kx of straight lines through the origin (the dotted lines in Figure2) are orthogonal trajectories of each other.
4.2.1 How to Find Orthogonal Trajectories
To find the orthogonal trajectories of the family
f(x, y, c) = 0, (4.10)

4 FAMILIES OF CURVES AND ORTHOGONAL TRAJECTORIES 32
Slope = dy/dx
Slope =−1/dy/dx
Figure 3: Orthogonal trajectories
we proceed as follows:
Step 1: Differentiate (4.10) implicitly with respect to x to get a relation of the form
g
(x, y,
dy
dx, c
)= 0. (4.11)
Step 2: Eliminate the parameter c from (4.10) and (4.11) to obtain the differential equa-tion
F
(x, y,
dy
dx
)= 0 (4.12)
corresponding to the first family (4.10).
Step 3: Replacedy
dxby − 1
dydx
in (4.12) to obtain the differential equation
H
(x, y,
dy
dx
)= 0 (4.13)
of the orthogonal trajectories (cf. Figure 3).
Step 4: General solution of (4.13) gives the required orthogonal trajectories.
Problem 4.3. Find the orthogonal trajectories of family of straight lines through theorigin.
Solution. The family of straight lines through the origin is given by
y = kx. (4.14)
To find the orthogonal trajectories, we proceed as follows.

4 FAMILIES OF CURVES AND ORTHOGONAL TRAJECTORIES 33
Step 1: Differentiating (4.14) with respect to x, we obtain
dy
dx= k. (4.15)
Step 2: Eliminating k from (4.14) and (4.15), we obtain
dy
dx=y
x. (4.16)
This gives the differential equation of the family (4.14).
Step 3: Replacingdy
dxby − 1
dydx
in (4.16), we obtain
dy
dx= −x
y. (4.17)
This gives the differential equation of the orthogonal trajectories.
Step 4: Solving differential equation (4.17), we obtain
x2 + y2 = C. (4.18)
Thus the orthogonal trajectories of family of straight lines through the origin is given by(4.18). Note that (4.18) is the family of circles with centre at the origin.
4.3 Oblique Trajectories
Slope=
Slope=
m
m
1
2
α
Figure 4: Oblique trajectories
Definition 4.2. Letf(x, y, c) = 0 (4.19)
be a one-parameter family of curves. A curve that intersects the curves of the family(4.19) at a constant angle α 6= π
2 is called an oblique trajectory of the given family.

4 FAMILIES OF CURVES AND ORTHOGONAL TRAJECTORIES 34
Let m1 and m2 be the the slope of the curves of the family (4.19) and the slope of theoblique trajectories of the family (4.19) respectively. Then, we have
± tanα =m1 −m2
1 +m1m2
⇒ m2 =m1 ∓ tanα
1±m1 tanα. (4.20)
Recall that to obtain the orthogonal trajectories, we were replacingdy
dxin the differential
equation of the given family of curves by − 1dydx
. But to obtain oblique trajectories, due to
(4.20), we need to replacedy
dxin the differential equation of the given family of curves by
dy
dx∓ tanα
1± dy
dxtanα
. (4.21)
Thus, we have the following procedure to obtain oblique trajectories intersecting the givenfamily of curves (4.19) at the constant angle α 6= π
2 .
Step 1: Differentiate (4.19) implicitly with respect to x to get a relation of the form
g
(x, y,
dy
dx, c
)= 0. (4.22)
Step 2: Eliminate the parameter c from (4.19) and (4.22) to obtain the differential equa-tion
F
(x, y,
dy
dx
)= 0 (4.23)
corresponding to the first family (4.19).
Step 3: Replacedy
dxby
dy
dx+ tanα
1− dy
dxtanα
,
to obtain the differential equations
H
(x, y,
dy
dx
)= 0. (4.24)
of the oblique trajectories.
Step 4: General solution of (4.24) gives the required oblique trajectories.

4 FAMILIES OF CURVES AND ORTHOGONAL TRAJECTORIES 35
Remark 4.1. If we replacedy
dxby
dy
dx− tanα
1 +dy
dxtanα
,
in (4.23) in Step 3, and obtain
H1
(x, y,
dy
dx
)= 0, (4.25)
then the general solution of (4.25) also gives a family of oblique trajectories.
Problem 4.4. Find the oblique trajectories that intersects the family
y = x+ c (4.26)
at an angle of 60◦.
Solution.
Step 1: Differentiating (4.26) with respect to x, we obtain
dy
dx= 1.
Step 2: Since c is already absent, there is no need to eliminate it and
dy
dx= 1 (4.27)
is the differential equation of the family (4.26).
Step 3: Replacingdy
dxby
dy
dx− tanα
1 +dy
dxtanα
i.e.,
dy
dx−√
3
1 +dy
dx
√3
,
in (4.27) to obtaindy
dx=
1 +√
3
1−√
3. (4.28)
This gives the differential equation of the oblique trajectories.

5 PICARD’S EXISTENCE AND UNIQUENESS THEOREM 36
Step 4: Solving differential equation (4.28), we obtain
y =1 +√
3
1−√
3x+ C. (4.29)
Thus (4.29) gives a family of oblique trajectories that intersects the given family of curvesat an angle of 60◦.
Remark 4.2. If we replacedy
dxby
dy
dx+ tanα
1− dy
dx
tanα
i.e.,
dy
dx+√
3
1− dy
dx
√3
,
in (4.27), then we obtaindy
dx=
1−√
3
1 +√
3. (4.30)
The general solution of this equation is
y =1−√
3
1 +√
3x+ C. (4.31)
This is another family of oblique trajectories that intersects the given family of curves atan angle of 60◦.
5 Picard’s Existence and Uniqueness Theorem
Example 5.1 (IVP with no solution). The IVP
|y′|+ |y| = 0, y(0) = 1
has no solution because y = 0 (that is, y(x) = 0 for all x) is the only solution of the ODE.One another example of an IVP which does not have any solution is given by
dy
dx=
{0 if x ≤ 01 if x > 0
y(0) = 0.
Example 5.2 (IVP with many solutions). The IVP
xdy
dx= y − 1, y(0) = 1
has infinitely many solutions, namely, y = 1+cx, where c is an arbitrary constant becausey(0) = 1 for all c.

5 PICARD’S EXISTENCE AND UNIQUENESS THEOREM 37
Example 5.3 (IVP with many solutions). The IVP
dy
dx= y
13 , y(0) = 0
has infinitely many solutions, as
y =
{0 if x ≤ c(
23(x− c)
) 32 if x ≥ c
is a solution of the stated problem for every real number c ≥ 0.
Example 5.4 (IVP with unique solution). The IVP
dy
dx= 2x, y(0) = 1
has precisely one solution, namely, y = x2 + 1.
Example 5.5 (IVP with unique solution). The IVP
dy
dx= 2x, y(0) = 1
has precisely one solution, namely, y = x2 + 1.
Example 5.6. The first-order differential equation
xdy
dx− 3y + 3 = 0.
has no solution satisfying the initial condition y(0) = 0, just one solution y(x) = 1 satis-fying y(1) = 1, and an infinite number of solutions y(x) = 1 + cx3 satisfying y(0) = 1.
The above examples motivate us raise the following questions on the solution of the firstorder IVP
dy
dx= f(x, y)
y(x0) = y0.
(5.1)
1. Under what conditions, there exists a solution to (5.1).
2. Under what conditions, there exists a unique solution to (5.1).
5.1 Lipschitz Condition
Definition 5.1. Let f be defined on D, where D is either a domain or closure of a domainof the xy plane. The function f is said to satisfy a Lipschitz condition (with respect to y)in D if there exists a constant K > 0 such that
|f(x, y1)− f(x, y2)| ≤ K|y1 − y2| (5.2)
for every (x, y1) and (x, y2) which belong to D. The constant K is called a Lipschitzconstant.

5 PICARD’S EXISTENCE AND UNIQUENESS THEOREM 38
Remark 5.1. If f satisfies condition (5.2) in D, then for each fixed x the resulting functionof y is a continuous function of y for (x, y) belonging to D. Note, however, that condition(5.2) implies nothing at all concerning the continuity of f with respect to x. For example,the function f defined by
f(x, y) = y + [x],
where [x] denotes the greatest integer less than or equal to x, satisfies a Lipschitz conditionin any bounded domain D. For each fixed x, the resulting function of y is continuous.However, this function f is discontinuous with respect to x for every integral value of x.
The following result is very useful to prove that a given function satisfies a Lipschitzcondition.
Theorem 5.1. Let f be such that∂f
∂yexists and is bounded for all (x, y) ∈ D, where D
is a domain or closure of a domain such that the line segment joining any two points ofD lies entirely within D. Then f satisfies a Lipschitz condition (with respect to y) in D.
Proof. Since∂f
∂yis bounded in D, there exists a K > 0 such that∣∣∣∣∂f(x, y)
∂y
∣∣∣∣ ≤ K for all (x, y) ∈ D. (5.3)
We claim that
|f(x0, y1)− f(x0, y2)| ≤ K|y1 − y2| for all (x0, y1), (x0, y2) ∈ D. (5.4)
Consider the points (x0, y1), (x0, y2) ∈ D, and without loss of generality, we assume thaty1 < y2. Note that since the line joining any two points of D lies entirely in D, we havefor all y ∈ [y1, y2], (x0, y) ∈ D. Now consider the function g : [y1, y2]→ R defined by
g(y) = f(x0, y).
Note that g is differentiable in [y1, y2], and
dg(y0)
dy=∂f(x0, y0)
∂yfor all y0 ∈ [y1, y2]. (5.5)
Using mean value theorem on g, we obtain a ξ ∈ (y1, y2) such that
|g(y1)− g(y2)| = |y1 − y2|∣∣∣∣dg(ξ)
dy
∣∣∣∣⇒ |f(x0, y1)− f(x0, y2)| = |y1 − y2|
∣∣∣∣∂f(x0, ξ)
∂y
∣∣∣∣ (by (5.5))
⇒ |f(x0, y1)− f(x0, y2)| ≤ K|y1 − y2| (by (5.3)).
This completes the proof.
Remark 5.2. A function f(x, y) may satisfy a Lipschitz condition but∂f
∂ymay not exists.
For example f(x, y) = x2|y|, |x| ≤ 1, |y| ≤ 1 satisfy a Lipschitz condition with respect to
y but∂f
∂ydoes not exist at (x, 0), x 6= 0 (prove it!).

5 PICARD’S EXISTENCE AND UNIQUENESS THEOREM 39
Problem 5.1. Show that each of the functions defined as follows satisfies a Lipschitzcondition in the rectangle D defined by D = {(x, y) : |x| ≤ a, |y| ≤ b}.
1. f(x, y) = y2.
2. f(x, y) = x sin y + y cosx.
3. f(x, y) = A(x)y2 +B(x)y + C(x), where A, B and C are continuous on |x| ≤ a.
Solution. (1): Here∂f
∂y= 2y, and hence
∣∣∣∣∂f∂y∣∣∣∣ = |2y| ≤ 2b, for all (x, y) ∈ D.
Therefore, by Theorem 5.1, f satisfies a Lipschitz condition.
(2): Here∂f
∂y= x cos y + cosx, and hence
∣∣∣∣∂f∂y∣∣∣∣ = |x cos y + cosx|
≤ |x cos y|+ | cosx|≤ |x|| cos y|+ 1
≤ |x|+ 1
≤ a+ 1
for all (x, y) ∈ D. Therefore, by Theorem 5.1, f satisfies a Lipschitz condition.
(3): Since A(x), B(x) are continuous in |x| ≤ a, A and B are also bounded in |x| ≤ a.Therefore, there exists positive numbers K1 and K2 such that
|A(x)| ≤ K1, and |B(x)| ≤ K2 for all x such that |x| ≤ a.
Therefore, we have ∣∣∣∣∂f∂y∣∣∣∣ = |2Ay +B|
≤ 2K1|y|+K2
≤ 2K1b+K2
for all (x, y) ∈ D. Therefore, by Theorem 5.1, f satisfies a Lipschitz condition.
Problem 5.2. Show that the function f(x, y) = y2 does not satisfy a Lipschitz conditionin the domain D := {(x, y) : |x| ≤ a, −∞ < y <∞}.
Solution. If f(x, y) satisfies a Lipschitz condition in D, then we must have a K such thatfor all (x, y1), (x, y2) ∈ D
|f(x, y1)− f(x, y2)| ≤ K|y1 − y2|
⇒ |f(x, y1)− f(x, y2)||y1 − y2|
≤ K. (5.6)

5 PICARD’S EXISTENCE AND UNIQUENESS THEOREM 40
Let |x0| ≤ a. Then (x0, 0) ∈ D. Then from (5.6), for all y ∈ (−∞,∞), we must have
|f(x0, 0)− f(x0, y)||0− y|
= |y| ≤ K.
This is not possible as y ∈ (−∞,∞).
Problem 5.3. Show that the function f(x, y) = y23 does not satisfy a Lipschitz condition
throughout any domain which includes the line y = 0.
Solution. Let D be any domain which includes the line y = 0.If f(x, y) satisfies a Lipschitz condition in D, then we must have a constant K such that
|f(x, y1)− f(x, y2)| ≤ K|y1 − y2| for all (x, y1), (x, y2) ∈ D.
That is,|f(x, y1)− f(x, y2)|
|y1 − y2|≤ K for all (x, y1), (x, y2) ∈ D, y1 6= y2. (5.7)
Therefore, as (x0, 0) ∈ D, where x0 is any fixed real number, it follows that if f(x, y)satisfies a Lipschitz condition in D, then we must have (taking x = x0 and y1 = 0 in (5.7))∣∣∣∣y 2
32
∣∣∣∣|y2|
=1∣∣∣∣y 132
∣∣∣∣ ≤ K for all (x0, y2) ∈ D, y2 6= 0. (5.8)
Now, since D is an open set and (x0, 0) ∈ D, there exists a r > 0 such that the line segmentL := {(x0, y) : 0 ≤ y ≤ r} ⊆ D. Note that (5.8) does not hold for all (x0, y) ∈ L ⊆ Das 1∣∣∣∣y 1
32
∣∣∣∣ → ∞ as y2 → 0 along the line segment L. Therefore, f(x, y) does not satisfy a
Lipschitz condition in D.
5.2 Existence and Uniqueness Theorem
Figure 5: Rectangle R in the existence and uniqueness theorems

5 PICARD’S EXISTENCE AND UNIQUENESS THEOREM 41
Theorem 5.2 (Existence). Let f(x, y) be continuous at all points (x, y) in some closedrectangle
R : {(x, y) : |x− x0| ≤ a, |y − y0| ≤ b}, (a, b > 0).
Since f is continuous in a closed and bounded domain, it is necessarily bounded in R; thatis, there is a number K such that
|f(x, y)| ≤ K for all (x, y) ∈ R.
Then the IVP (5.1) has at least one solution y = y(x). This solution exists at least for allx in the subinterval |x− x0| ≤ β of the interval |x− x0| ≤ a, where
β = min
{a,
b
K
}.
(Note that the solution exists possibly in a smaller interval)
Theorem 5.3 (Uniqueness). Let f be a real function satisfying the following two condi-tions:
1. f(x, y) is continuous at all points (x, y) in the closed rectangle
R : {(x, y) : |x− x0| ≤ a, |y − y0| ≤ b}, (a, b > 0);
and hence bounded in R; that is, there is a number K such that
|f(x, y)| ≤ K for all (x, y) ∈ R.
2. f satisfies a Lipschitz condition (with respect to y) in R.
Then the initial value problem (5.1) has at most one solution y = y(x). Thus, by ExistenceTheorem, the problem has precisely one solution. This solution exists at least for all x inthe subinterval |x− x0| ≤ β, where
β = min
{a,
b
K
}.
Corollary 5.4. Let f and its partial derivative∂f
∂ybe continuous for all (x, y) in the
closed rectangle
R : {(x, y) : |x− x0| < a, |y − y0| < b}, (a, b > 0),
and hence bounded, say
|f(x, y)| ≤ K, and
∣∣∣∣∂f(x, y)
∂y
∣∣∣∣ ≤Mfor all (x, y) ∈ R. Then the initial value problem (5.1) has one and only one solution y(x).This solution exists at least for all x in the subinterval |x− x0| ≤ β, where
β = min
{a,
b
K
}.

5 PICARD’S EXISTENCE AND UNIQUENESS THEOREM 42
Proof. Follows from Theorems 5.1 and 5.3.
Remark 5.3. The existence and uniqueness theorems stated above are local in naturesince the interval, |x − x0| ≤ β, where solution exists may be smaller than the originalinterval, |x − x0| ≤ a, where f(x, y) is defined. However, in some cases, this restrictionscan be removed. For instance, we have the following theorem.
Theorem 5.5. Let f(x, y) be a continuous function that satisfies a Lipschitz condition
|f(x, y1)− f(x, y2)| ≤ K|y1 − y2|
on a strip defined by a ≤ x ≤ b and −∞ < y < ∞. If (x0, y0) is any point of the strip,then the initial value problem
y′ = f(x, y) y(x0) = y0
has one and only one solution y = y(x) on the interval a ≤ x ≤ b.
Example 5.7. Consider the IVP
dy
dx+ p(x)y = r(x)
y(x0) = y0.
(5.9)
where p(x) and r(x) are defined and continuous in the interval a ≤ x ≤ b. Here f(x, y) =−p(x)y + r(x). Let L = max{|p(x)| : a ≤ x ≤ b}. Then
|f(x, y1)− f(x, y2)| = | − p(x)(y1 − y2)| ≤ L|y1 − y2|.
Thus, f satisfies Lipschitz condition w.r.t y in the infinite vertical strip a ≤ x ≤ b and−∞ < y < ∞. Therefore, the IVP (5.9) has a unique solution in the original intervala ≤ x ≤ b.
Remark 5.4. Though the theorems are stated in terms of interior point x0, the point x0
could be left/right end point.
Example 5.8. Consider the initial-value problem
dy
dx= x2 + y2, y(1) = 3.
Here f(x, y) = x2 + y2, and∂f
∂y= 2y. Both of the functions f and
∂f
∂yare continuous and
bounded in every domain
R : {(x, y) : |x− 1| < a, |y − 3| < b}, (a, b > 0).
Thus all hypotheses of the Existence and Uniqueness Theorem are satisfied, and hencethere is a unique solution φ of the above IVP.

5 PICARD’S EXISTENCE AND UNIQUENESS THEOREM 43
Example 5.9. Consider the ODE
dy
dx= 1 + y2, y(0) = 0.
Consider the rectangleS = {(x, y) : |x| ≤ 100, |y| ≤ 1}.
Clearly f and∂y
∂xare continuous in S. Hence, there exists a solution in the neighbourhood
of (0, 0). Now f(x, y) = 1 + y2, and |f(x, y)| ≤ 2 for all (x, y) ∈ S. Therefore, β =min
{100, 1
2
}, and hence the theorems guarantee existence of unique solution in |x| ≤ 1
2 ,which is much smaller than the original interval |x| ≤ 100.Since, the above equation is separable, we can solve it exactly and find y(x) = tan(x).This solution is valid only in −π
2 < x < π2 which is also much smaller than |x| ≤ 100, but
nevertheless bigger than that predicted by the existence and uniqueness theorems.

6 BASIC THEORY OF LINEAR HOMOGENEOUS DIFFERENTIAL EQUATIONS44
6 Basic Theory of Linear Homogeneous Differential Equa-tions
Definition 6.1 (Linear ODE). A linear ordinary differential equation of order n, in thedependent variable y and the independent variable x, is an equation that is in, or can beexpressed in, the form
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F (x), (6.1)
where a0 is not identically zero (that is, a0(x) 6= 0 for some x).
Definition 6.2 (Linear Homogeneous ODE). Consider a linear ordinary differential equa-tion
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F (x). (6.2)
If the function F (x) is identically zero (that is, F (x) = 0 for all x considered), then (6.2)is called a linear homogeneous ODE. If F (x) is not identically zero, then (6.2) is calledlinear nonhomogeneous ODE.
Example 6.1. The equationsd2y
dx2+ 3x
dy
dx+ x3y = 0, and
d2y
dx2+ 3x
dy
dx+ x3y = ex are
respectively homogeneous and nonhomogeneous linear ODE.
Theorem 6.1 (Existence and Uniqueness Theorem). Consider the nth-order linear dif-ferential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F (x), (6.3)
where a0, a1, . . . , an and F are continuous real functions on a real interval a ≤ x ≤ b anda0(x) 6= 0 for all x on a ≤ x ≤ b. Consider an IVP consisting of the Equation (6.3) alongwith the supplementary conditions
y(x0) = c0, y′(x0) = c1, . . . , y
(n−1)(x0) = cn−1, x0 ∈ [a, b].
Then there exists a unique solution f of this IVP and this solution is defined over theentire interval a ≤ x ≤ b.
Remark 6.1. For the second-order linear differential equation,
a0(x)d2y
dx2+ a1(x)
dy
dx+ a2(x)y = F (x), (6.4)
Theorem 6.1 takes the following form:Let a0, a1, a2 and F be continuous real functions on a real interval a ≤ x ≤ b and a0(x) 6= 0for all x on this interval. Then the IVP
a0(x)d2y
dx2+ a1(x)
dy
dx+ a2(x)y = F (x)
y(x0) = c0, y′(x0) = c1, x0 ∈ [a, b]
has a unique solution f and this solution is defined over the entire interval a ≤ x ≤ b.

6 BASIC THEORY OF LINEAR HOMOGENEOUS DIFFERENTIAL EQUATIONS45
Example 6.2. Consider the initial-value problem
d2y
dx2+ 3x
dy
dx+ x3y = ex,
y(1) = 2, y′(1) = −5
Note that 1, 3x, x3 and ex are all continuous for all values of x, −∞ < x < ∞. Thepoint x0 here is the point 1, and the real numbers c0 and c1 are 2 and −5, respectively.Thus Theorem 6.1 assures us that a solution of the given problem exists, is unique, and isdefined for all x, −∞ < x <∞.
Problem 6.1. Let f be a solution of the nth-order homogeneous linear differential equa-tion
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0, (6.5)
such thatf(x0) = 0, f ′(x0) = 0, . . . , f (n−1)(x0) = 0,
where x0 is a point of the interval a ≤ x ≤ b in which the coefficients a0, a1, . . . , an are allcontinuous and a0(x) 6= 0 for all x ∈ [a, b]. Then f(x) = 0 for all x on a ≤ x ≤ b.Solution. Note that the function g defined by g(x) = 0 for all x ∈ [a, b] is a solution of thegiven IVP.
We now consider the fundamental results concerning the linear homogeneous equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0, (6.6)
where a0 is not identically zero.
6.1 Linear Combination of Solutions
Definition 6.3 (Linear Combination). If f1, f2, . . . , fm are given functions, and c1, c2, . . . , cmare m constants, then the expression
c1f1 + c2f2 + . . .+ cmfm
is called a linear combination of f1, f2, . . . , fm.
Theorem 6.2 (Basic Theorem On Linear Homogeneous ODEs). Any linear combinationof solutions of the homogeneous linear differential equation (6.6) is also a solution of (6.6).
Proof. Trivial
Remark 6.2. For the second-order linear homogeneous equation,
a0(x)d2y
dx2+ a1(x)
dy
dx+ a2(x)y = 0, (6.7)
Theorem 6.2 states that if f1 and f2 are two solutions of (6.7), then, c1f1 + c2f2 is also asolution of (6.7), where c1 and c2 are any two constants.
Example 6.3. We can verify that sinx and cosx are solutions of
d2y
dx2+ y = 0
and hence, by Theorem 6.2, 5 sinx+ 6 cosx is also a solution of it.

6 BASIC THEORY OF LINEAR HOMOGENEOUS DIFFERENTIAL EQUATIONS46
6.2 Linear Independence of Solutions
Definition 6.4 (Linear Dependence and Independence). Let f1, f2, . . . , fm be m functionsdefined in an interval I.
1. The m functions f1, f2, . . . , fm are called linearly dependent on a ≤ x ≤ b if thereexist constants c1, c2, . . . , cm not all zero, such that
c1f1(x) + c2f2(x) + . . .+ cmfm(x) = 0
for all x ∈ [a, b].
2. The m functions f1, f2, . . . , fm are called linearly independent on the interval a ≤x ≤ b if they are not linearly dependent there. That is, the functions f1, f2, . . . , fmare linearly independent on a ≤ x ≤ b if the relation
c1f1(x) + c2f2(x) + . . .+ cmfm(x) = 0
for all x ∈ [a, b] implies that
c1 = c2 = · · · = cm = 0.
Example 6.4.
1. sinx, cosx are linearly independent on [−π, π].
2. x|x|, x2 are linearly independent on [−1, 1].
3. x|x|, x2 are linearly dependent on [0, 1].
Definition 6.5 (Wronskian). Let f1, f2, . . . , fn be n real functions each of which has an(n− 1)st derivative on a real interval a ≤ x ≤ b. The determinant
W (f1, f2, . . . , fn) =
∣∣∣∣∣∣∣∣∣f1 f2 · · · fnf ′1 f ′2 · · · f ′n...
......
f(n−1)1 f
(n−1)2 · · · f
(n−1)n
∣∣∣∣∣∣∣∣∣in which primes denote derivatives, is called the Wronskian of these n functions. Weobserve that W (f1, f2, . . . , fn) is itself a real function defined on a ≤ x ≤ b. Its value at xis denoted by W (f1, f2, . . . , fn)(x) or by W [f1(x), f2(x), . . . , fn(x)].
Remark 6.3. For two differentiable functions f and g defined on [a, b], Wronskian W (f, g)is obtained as the function
W (f, g)(x) = f(x)g′(x)− g(x)f ′(x), x ∈ [a, b].
Theorem 6.3 (Wronskian and Linear Independence). Let f1, f2, . . . , fn be n real functionseach of which has an (n− 1)st derivative on a real interval a ≤ x ≤ b.

6 BASIC THEORY OF LINEAR HOMOGENEOUS DIFFERENTIAL EQUATIONS47
1. If f1, f2, . . . , fn are linearly dependent on [a, b], then
W (f1, f2, . . . , fn)(x) = 0 for all x ∈ [a, b]
2. Let f1, f2, . . . , fn be the solutions of the linear homogeneous equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0, (6.8)
where a0, a1, . . . , an are continuous real functions on the real interval a ≤ x ≤ b anda0(x) 6= 0 for all x on a ≤ x ≤ b. If
W (f1, f2, . . . , fn)(x0) = 0
for some x0 ∈ [a, b], then f1, f2, . . . , fn are linearly dependent on [a, b].
3. The Wronskian of n solutions f1, f2, . . . , fn of (6.8) is either identically zero ona ≤ x ≤ b or else is never zero on a ≤ x ≤ b.
Proof. (1): Let us choose an arbitrary d ∈ [a, b], and we prove W (f1, f2, . . . , fn)(d) = 0.Since f1, f2, . . . , fn are linearly dependent on [a, b], there exists c1, c2, . . . , cn not all zerosuch that
c1f1(x) + c2f2(x) + . . .+ cnfn(x) = 0 for all x ∈ [a, b]. (6.9)
From (6.9), we obtain for all x ∈ [a, b]
c1f′1(x) + c2f
′2(x) + . . .+ cnf
′n(x) = 0
c1f′′1 (x) + c2f
′′2 (x) + . . .+ cnf
′′n(x) = 0
· · · · · · · · · · · · · · · · · · · · ·c1f
n−11 (x) + c2f
n−12 (x) + . . .+ cnf
n−1n (x) = 0
Thus, in particular for the point d ∈ [a, b], we obtain
c1f1(d) + c2f2(d) + . . .+ cnfn(d) = 0
c1f′1(d) + c2f
′2(d) + . . .+ cnf
′n(d) = 0
c1f′′1 (d) + c2f
′′2 (d) + . . .+ cnf
′′n(d) = 0
· · · · · · · · · · · · · · · · · ·c1f
n−11 (d) + c2f
n−12 (d) + . . .+ cnf
n−1n (d) = 0
(6.10)
Note that (6.10) is a linear homogeneous system of n equations in n unknowns c1, c2, . . . , cn.Since this system has a nontrivial solution (as not all of c1, c2, . . . , cn are zero), the deter-minant ∣∣∣∣∣∣∣∣∣
f1(d) f2(d) · · · fn(d)f ′1(d) f ′2(d) · · · f ′n(d)
......
...
f(n−1)1 (d) f
(n−1)2 (d) · · · f
(n−1)n (d)
∣∣∣∣∣∣∣∣∣ = 0,
and hence W (f1, f2, . . . , fn)(d) = 0.

6 BASIC THEORY OF LINEAR HOMOGENEOUS DIFFERENTIAL EQUATIONS48
(2): Consider the following linear homogeneous system of n equations in n unknownsc1, c2, . . . , cn
c1f1(x0) + c2f2(x0) + . . .+ cnfn(x0) = 0
c1f′1(x0) + c2f
′2(x0) + . . .+ cnf
′n(x0) = 0
c1f′′1 (x0) + c2f
′′2 (x0) + . . .+ cnf
′′n(x0) = 0
· · · · · · · · · · · · · · · · · ·c1f
n−11 (x0) + c2f
n−12 (x0) + . . .+ cnf
n−1n (x0) = 0
(6.11)
Now the determinant of the system (6.11) is the Wronskian W (f1, f2, . . . , fn) at x0, andhence this determinant is zero. Therefore, we can find nontrivial solution for the system(6.11), that is, there exists c1, c2, . . . , cn, not all zero, satisfying equations of the system(6.11). Take these c1, c2, . . . , cn and form
y(x) = c1f1(x) + c2f2(x) + · · ·+ cnfn(x). (6.12)
Now using the fact that (6.12) is a solution of (6.8), and the c1, c2, . . . , cn satisfy theequations of the system (6.11), we obtain (6.12) as a solution of the IVP
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0
y(x0) = 0, y′(x0), . . . , y(n−1)(x0) = 0.
(6.13)
But f(x) ≡ 0 is a solution of the IVP (6.13), and hence using the Uniqueness Theorem6.1, we obtain y(x) ≡ 0, that is,
c1f1(x) + c2f2(x) + · · ·+ cnfn(x) = 0 for all x ∈ [a, b].
Since c1, c2, . . . , cn are not all zero, we obtain f1, f2, . . . , fn as linearly dependent on [a, b].
(3): Follows from (1) and ((2)).
Remark 6.4. Conclusion of Item (2) of Theorem 6.3 may not hold if f1, f2, . . . , fn are notsolutions of (6.8). That is, we can have linearly independent f1, f2, . . . , fn on [a, b] withW (f1, f2, . . . , fn)(x0) = 0 for some x0 ∈ [a, b]. For instance, the functions f(x) = x, andg(x) = sinx are linearly independent on [−2π, 2π] (use Item (1) of Theorem 6.3 at x = πto prove it), but W (f, g)(0) = 0.
As a direct consequence of Theorem 6.3, we obtain
Corollary 6.4. Let f1, f2, . . . , fn be the solutions of the linear homogeneous equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0,
where a0, a1, . . . , an are continuous real functions on the real interval a ≤ x ≤ b anda0(x) 6= 0 for all x on a ≤ x ≤ b. Then the followings are equivalent.
1. f1, f2, . . . , fn are linearly dependent on [a, b].

6 BASIC THEORY OF LINEAR HOMOGENEOUS DIFFERENTIAL EQUATIONS49
2. W (f1, f2, . . . , fn)(x) = 0 for all x ∈ [a, b].
3. W (f1, f2, . . . , fn)(x) = 0 for some x ∈ [a, b].
Example 6.5. The solutions sinx and cosx of
d2y
dx2+ y = 0
are linearly independent on every real interval as
W (sinx, cosx) =
∣∣∣∣sinx cosxcosx − sinx
∣∣∣∣ = − sin2 x− cos2 x = −1 6= 0
for all real x.
Problem 6.2. Consider the linear homogeneous equation
x3 d3y
dx3− 4x2 d2y
dx2= 8x
dy
dx− 8y = 0.
1. Verify that x, x2 and x4 are all solutions of this equation.
2. Show that W (x, x2, x4) = 0 at x = 0, but W (x, x2, x4) 6= 0 at x = 1.
3. Show that x, x2 and x4 are linearly independent on [0, 1].
4. Explain why the Items 1-3 does not contradict Corollary 6.4 in the interval [0, 1].
6.3 Fundamental Set/Basis of Solutions and General Solution
Theorem 6.5 (Existence of Linearly Independent Solutions). Consider the nth-orderhomogeneous linear differential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0, (6.14)
where a0, a1, . . . , an are continuous real functions on a real interval a ≤ x ≤ b and a0(x) 6=0 for all x on a ≤ x ≤ b. Then (6.14) always possesses n solutions that are linearlyindependent on [a, b].
Proof. Let x0 ∈ [a, b]. Consider the IVP consisting of the equation (6.14) and the supple-mentary conditions y(x0) = 1, y′(x0) = 0, . . . , y(n−1)(x0) = 0. Then by the existence anduniqueness theorem 6.1, this IVP has a unique solution f0 defined on [a, b]. Similarly, foreach integer i, 0 ≤ i ≤ n−1, the IVP consisting of the equation (6.14) and the supplemen-tary conditions y(x0) = 0, y′(x0) = 0, . . . , y(i) = 1, . . . , y(n−1)(x0) = 0 has unique solutionfi defined on [a, b]. Now it remains to show that f0, f1, . . . , fn−1 are linearly independent

6 BASIC THEORY OF LINEAR HOMOGENEOUS DIFFERENTIAL EQUATIONS50
on [a, b]. But this follows from Theorem 6.3, and the fact that
W (f0, f1, . . . , fn−1)(x0) =
∣∣∣∣∣∣∣∣∣∣f0(x0) f1(x0) · · · fn−1(x0)f ′0(x0) f ′1(x0) · · · f ′n−1(x0)
......
...
f(n−1)0 (x0) f
(n−1)1 (x0) · · · fn−1
(n−1)(x0)
∣∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣1 0 · · · 00 1 · · · 0...
......
0 0 · · · 1
∣∣∣∣∣∣∣∣∣ = 1.
Theorem 6.6. Let f1, f2, . . . , fn are n linearly independent solutions defined on [a, b] ofthe nth-order homogeneous linear differential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0, (6.15)
where a0, a1, . . . , an are continuous real functions on a real interval a ≤ x ≤ b and a0(x) 6=0 for all x on a ≤ x ≤ b. Then every solution f defined on [a, b] of (6.15) can be expressedas a linear combination
f = c1f1 + c2f2 + · · ·+ cnfn
by proper choice of the constants c1, c2, . . . , cn.
Proof. Let f be any solution of (6.15) defined on [a, b], and let x0 ∈ [a, b]. Consider thefollowing linear system of n equations in n unknowns c1, c2, . . . , cn
c1f1(x0) + c2f2(x0) + . . .+ cnfn(x0) = f(x0)
c1f′1(x0) + c2f
′2(x0) + . . .+ cnf
′n(x0) = f ′(x0)
c1f′′1 (x0) + c2f
′′2 (x0) + . . .+ cnf
′′n(x0) = f ′′(x0)
· · · · · · · · · · · · · · · · · ·c1f
n−11 (x0) + c2f
n−12 (x0) + . . .+ cnf
n−1n (x0) = fn−1(x0)
(6.16)
Since f1, f2, . . . , fn are linearly independent solution,
W (f1, f2, . . . , fn)(x0) =
∣∣∣∣∣∣∣∣∣f1(x0) f2(x0) · · · fn(x0)f ′1(x0) f ′1(x0) · · · f ′n)(x0)
......
...
f(n−1)1 (x0) f
(n−1)2 (x0) · · · f
(n−1)n (x0)
∣∣∣∣∣∣∣∣∣ 6= 0.
Hence the system (6.16) has unique solution, say, c1 = d1, c2 = d2, · · · , cn = dn. Let
ξ(x) = d1f1(x) + d2f2(x) + . . .+ dnfn(x), x ∈ [a, b].

6 BASIC THEORY OF LINEAR HOMOGENEOUS DIFFERENTIAL EQUATIONS51
Now consider the IVP
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0,
y(x0) = f(x0), y′(x0) = f ′(x0), . . . , y(n−1)(x0) = f (n−1)(x0)
(6.17)
Note that both f and ξ are solutions of this IVP, and are defined on [a, b]. Therefore, byTheorem 6.1, we must have ξ(x) = f(x) for all x ∈ [a, b]. That is,
f(x) = d1f1(x) + d2f2(x) + . . .+ dnfn(x), x ∈ [a, b].
Definition 6.6 (Fundamental Set of Solution and General Solution). If f1, f2, . . . , fn aren linearly independent solutions of the nth-order homogeneous linear differential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0, (6.18)
on a ≤ x ≤ b, then the set {f1, f2, . . . , fn} is called a fundamental set/Basis of solutionsof (6.18) and the function f defined by
f(x) = c1f1(x) + c2f2(x) + . . .+ cnfn(x), a ≤ x ≤ b,
where c1, c2, . . . , cn are arbitrary constants, is called a general solution of (6.18) on a ≤x ≤ b.
Remark 6.5. Let f(x) = c1f1(x) + c2f2(x) + . . . + cnfn(x) be a general solution of thethe nth-order homogeneous linear differential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0, (6.19)
where a0, a1, . . . , an are continuous real functions on the real interval a ≤ x ≤ b anda0(x) 6= 0 for all x on a ≤ x ≤ b. Then, from Theorem 6.6, it follows that every solution of(6.19) is obtained from the general solution f by chossing suitable value for the constantsc1, c2, . . . , cn.
Theorem 6.7 (Existence of General Solution). The nth-order homogeneous linear differ-ential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0,
where a0, a1, . . . , an are continuous real functions on the real interval a ≤ x ≤ b anda0(x) 6= 0 for all x on a ≤ x ≤ b, has a fundamental set/basis of solutions, and hence ageneral solution.
Example 6.6. One can show that sinx and cosx are two linearly independent solutionsof
d2y
dx2+ y = 0 (6.20)
for all x, −∞ < x <∞. Therefore, general solution of (6.20) is given by
y(x) = c1 sinx+ c2 cosx. (6.21)
Every solution of (6.20) is obtained from (6.21) by suitable choice of the constants c1, c2.

7 HOMOGENEOUS LINEAR EQUATION WITH CONSTANT COEFFICIENTS 52
7 Homogeneous Linear Equation with Constant Coefficients
7.1 Homogeneous 2nd Order Linear Equation with Constant Coeffi-cients
Consider differential equations of the form
ad2y
dx2+ b
dy
dx+ cy = 0 (7.1)
where a, b, c are real constants, and a 6= 0. Such an equation is called homogeneous 2ndorder linear equation with constant coefficients.
Let us assume that equation (7.1) has a solution of the form y = emx, where m is aconstant to be determined. If we substitute this solution in (7.1), we obtain
am2 + bm+ c = 0 (∵ emx 6= 0). (7.2)
Equation (7.2) is called characteristic equation for (7.1). Two independent solutions (i.e.,basis) of such an equation depend on the roots of quadratic equation (7.2).
Theorem 7.1. Consider the 2nd order homogeneous linear differential equation (7.1) withconstant coefficients. Let m1,m2 be the roots of the characteristic equation (7.2).
• Real and distinct roots: If m1 and m2 are real and distinct, then two linearlyindependent solutions of (7.1) are em1x and em2x. Thus the general solution of (7.1)is
y = C1em1x + C2em2x.
• Real and equal roots: If m1 and m2 are real and m1 = m2 = m, then two linearlyindependent solutions of (7.1) are emx and xemx. Thus the general solution of (7.1)is
y = emx(C1 + C2x).
• Complex roots: If m1 and m2 are complex conjugate, say m1 = α + iβ, andm2 = α− iβ, then the general solution of (7.1) is
y = eαx(C1 cosβx+ C2 sinβx).
Problem 7.1. Solved2y
dx2− dy
dx= 0.
Solution. The characteristic equation is m2 − m = 0, and it has roots m = 0, 1. Thegeneral solution is y = C1 + C2ex.
Problem 7.2. Solved2y
dx2− 2
dy
dx+ y = 0.
Solution. The characteristic equation is m2 − 2m+ 1 = 0, and it has roots m = 1, 1. Thegeneral solution is y = ex(C1 + C2x).
Problem 7.3. Solved2y
dx2− 2
dy
dx+ 5y = 0.
Solution. The characteristic equation is m2 − 2m + 5 = 0, and it has roots m = 1 ± 2i.The general solution is y = ex(C1 cos 2x+ C2 sin 2x).

7 HOMOGENEOUS LINEAR EQUATION WITH CONSTANT COEFFICIENTS 53
7.2 Homogeneous nth Order Linear Equation with Constant Coefficients
A nth order homogeneous linear equation with constant coefficients is of the form
a0dny
dxn+ a1
dn−1y
dxn−1+ · · ·+ an−1
dy
dx+ any = 0, (7.3)
where all ai’s are real constants and a0 6= 0. As in the case of 2nd order linear equation,the linearly independent solutions of (7.3) depends on the characteristic equation
a0mn + a1m
n−1 + · · ·+ an−1m+ an = 0 (7.4)
This equation has n roots. As in the case of 2nd order equation, the following can beproved.
Theorem 7.2. The fundamental set of solutions B for (7.3) is obtained using the followingtwo rules:
Rule 1: If a root m of (7.4) is real and repeated k times, then this root gives k numberof linearly independent solutions emx, xemx, x2emx, . . . , xk−1emx to B.
Rule 2: If the roots m = α ± iβ of (7.4) is complex conjugate (β 6= 0) and are repeatedk times each, then they contribute 2k number of linearly independent solutions eαx cosβx,eαx sinβx, xeαx cosβx, xeαx sinβx, x2eαx cosβx, x2eαx sinβx, . . . , xk−1eαx cosβx, andxk−1eαx sinβx to B.
Problem 7.4. Solve
d6y
dx6+ 8
d5y
dx5+ 25
d4y
dx4+ 32
d3y
dx3− d2y
dx2− 40
dy
dx− 25y = 0.
Solution. The characteristic equation is
m6 + 8m5 + 25m4 + 32m3 −m2 − 40m− 25 = 0
and it has roots m = 1,−1,−2± i,−2± i.Solutions corresponding to the roots 1 and −1 are ex, and e−x respectively, and solutionscorresponding to −2 ± i are e−2x cosx, e−2x sinx, xe−2x cosx, xe−2x sinx. Therefore, sixlinearly independent solutions are ex, e−x, e−2x cosx, e−2x sinx, xe−2x cosx, xe−2x sinx,and hence the general solution is
y = C1ex + C2e−x + e−2x(
(C3 + C4x) cosx+ (C5 + C6x) sinx).
Problem 7.5. Solve
d4y
dx4− 4
d3y
dx3+ 14
d2y
dx2− 20
dy
dx+ 25y = 0.
Solution. The characteristic equation is
m4 − 4m3 + 14m2 − 20m+ 25 = 0
and it has roots m = 1 + 2i, 1− 2i, 1 + 2i, 1− 2i.Therefore, four linearly independent solutions are
ex cos 2x, ex sin 2x, xex cos 2x, xex sin 2x.
The general solution is
y = ex[(C1 + C2x) sin 2x+ (C3 + C4x) cos 2x].

8 BASIC THEORYOF LINEAR NONHOMOGENEOUS DIFFERENTIAL EQUATIONS54
8 Basic Theory of Linear Nonhomogeneous Differential Equa-tions
We first recall the following existence and uniqueness theorem.
Theorem 8.1 (Existence and Uniqueness Theorem). Consider the nth-order linear dif-ferential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F (x), (8.1)
where a0, a1, . . . , an and F are continuous real functions on a real interval a ≤ x ≤ b anda0(x) 6= 0 for all x on a ≤ x ≤ b. Consider an IVP consisting of the Equation (8.1) alongwith the supplementary conditions
y(x0) = c0, y′(x0) = c1, . . . , y
(n−1)(x0) = cn−1, x0 ∈ [a, b].
Then there exists a unique solution f of this IVP and this solution is defined over theentire interval a ≤ x ≤ b.
Theorem 8.2 (Relations of Solutions of Linear Nonhomogeneous ODE and its Homoge-neous counterpart). Consider the nonhomogeneous linear ODE
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F (x), (8.2)
and homogeneous part of (8.2)
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0. (8.3)
Let I be an interval.
1. The sum of a solution y of (8.2) on I and a solution y of (8.3) on I is a solution of(8.2) on I.
2. The difference of two solutions of (8.2) on I is a solution of (8.3) on I.
Theorem 8.3. Consider the nth-order nonhomogeneous linear differential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F (x), (8.4)
and the corresponding homogeneous equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0, (8.5)
where a0, a1, . . . , an and F are continuous real functions on a real interval a ≤ x ≤ b anda0(x) 6= 0 for all x on a ≤ x ≤ b. Let yp, defined on [a, b], be a given solution involvingno arbitrary constants of (8.4), and
yc = c1y1 + . . .+ cnyn

8 BASIC THEORYOF LINEAR NONHOMOGENEOUS DIFFERENTIAL EQUATIONS55
be the general solution of the homogeneous equation (8.5) defined on [a, b]. Then everysolution φ of the nonhomogeneous equation (8.4) can be expressed in the form
yc + yp,
for suitable choice of the n arbitrary constants c1, c2, . . . , cn.
Proof. Let φ be a solution of (8.4). Then, by Theorem 8.2, φ−yp is a solution of (8.5). Sinceyc = c1y1 + . . .+ cnyn is the general solution of (8.4), Remark 6.5 guarantees the suitablechoices of the n arbitrary constants c1, c2, . . . , cn such that φ − yp = c1y1 + . . . + cnyn.Thus
φ = yp + c1y1 + . . .+ cnyn,
for suitable choice of the arbitrary constants c1, c2, . . . , cn.
Definition 8.1 (General Solution). Consider the nth-order (nonhomogeneous) linear dif-ferential equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F (x), (8.6)
and the corresponding homogeneous equation
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = 0. (8.7)
1. The general solution of (8.7) is called the complementary function of Equation(8.6). We shall denote this by yc.
2. Any particular solution of (8.6) involving no arbitrary constants is called a partic-ular integral of (8.6). We shall denote this by yp.
3. The solution yc + yp of (8.6), where yc is the complementary function and yp is aparticular integral of (8.6), is called the general solution of (8.6).
Example 8.1. Consider the differential equation
d2y
dx2+ y = x.
The complementary function is the general solution
yc = c1 sinx+ c2 cosx
of the corresponding homogeneous equation
d2y
dx2+ y = 0.
A particular integral is given byyp = x.
Thus the general solution of the given equation may be written
y = yc + yp = c1 sinx+ c2 cosx+ x.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 56
9 Solution Methods for Nonhomogeneous Linear ODEs
We point out that if the nonhomogeneous member F (x) of the linear differential equation(8.6) is expressed as a linear combination of two or more functions, then the followingtheorem may often be used to advantage in finding a particular integral.
Theorem 9.1. Let f1 be a particular integral of
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F1(x),
and f2 be a particular integral of
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = F2(x).
Then k1f1 + k2f2 is a particular integral of
a0(x)dny
dxn+ a1(x)
dn−1y
dxn−1+ · · ·+ an−1(x)
dy
dx+ an(x)y = k1F1 + k2F2(x),
where k1 and k2 are constants.
9.1 The Method of Undermined Coefficients
Definition 9.1. We shall call a function a UC function if it is either (1) a function definedby one of the following:
(i) xn, where n is a positive integer or zero,
(ii) eax, where a is a non zero constant,
(iiii) sin bx, where b is a non zero constant,
(iv) cos bx, where b is a non zero constant,
or (2) a function defined as a finite product of two or more functions of these four types.
Example 9.1. A few examples of UC functions are xex, e2xex, e5xx2 sin 2x, sinx cosx, sin2 3x.
Definition 9.2. Consider a UC function f . The set of functions consisting of f itself andall linearly independent UC functions of which the successive derivatives of f are eitherconstant multiples or linear combinations will be called the UC set of f .
Remark 9.1. Suppose h is a UC function defined as the product fg of two basic UCfunctions f and g. Then the UC set of the product function h is the set of all the productsobtained by multiplying the various members of the UC set of f by the various membersof the UC set of g.
Table 1 lists some of the UC functions and their UC sets.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 57
UC function UC set
1 xn {xn, xn−1, xn−2, . . . , x, 1}
2 eax {eax}
3 sin bx, or cos bx {sin bx, cos bx}
4 xneax {xneax, xn−1eax, xn−2eax, . . . , x, 1}eax
5 xn sin bx, or xn cos bx {xn sin bx, xn−1 sin bx, xn−2 sin bx, . . . , x sin bx,sin bx, xn cos bx, xn−1 cos bx, xn−2 cos bx, . . . ,x cos bx, cos bx}
6 eax sin bx, or eax cos bx {eax sin bx, eax cos bx}
7 xneax sin bx, or xneax cos bx {eaxxn sin bx, eaxxn−1 sin bx, eaxxn−2 sin bx, . . . ,eaxx sin bx, eax sin bx, eaxxn cos bx, eaxxn−1 cos bx,eaxxn−2 cos bx, . . . , eaxx cos bx, eax cos bx}
Table 1: Some UC functions and corresponding UC sets
Remark 9.2. The method of undetermined coefficients works for the following nonhomo-geneous linear equation:
a0dny
dxn+ a1
dn−1y
dxn−1+ · · ·+ an−1
dy
dx+ any = F (x) (9.1)
where all ais are real constants and F (x) is a finite linear combination of UC functions. Infact, due to Theorem 9.1, we need to consider only the case when F (x) is an UC function.
Method 1
To determine a particular integral yp of the nonhomogeneous linear equation (9.1), whereF (x) is an UC function, we proceed as follows:
Step 1: Obtain the UC set S of the UC function F (x).
Step 2: Obtain the set N as follows:
• If none of the functions in S is a solution of the homogeneous equation
a0dny
dxn+ a1
dn−1y
dxn−1+ · · ·+ an−1
dy
dx+ any = 0, (9.2)
Then we take N := S.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 58
• If S includes one or more functions which are solutions of the correspondinghomogeneous differential equation (9.2), then we multiply each member of Sby the lowest positive integral power of x, say xn, so that the resulting revisedset will contain no members that are solutions of (9.2). We take N to be thisrevised set, so obtained.
After Step 2, suppose N is obtained as the set {f1, f2, . . . , fm}.
Step 3: Form a linear combination α1f1 + α2f2 + · · · + αmfm of elements of N withunknown constant coefficients αi.
Step 4: Determine the unknown coefficients αi by substituting the linear combinationy = α1f1 + α2f2 + · · · + αmfm formed in Step 3 into the differential equation (9.1)and demanding that it identically satisfy the differential equation.
Step 5: Substitute the values of αi’s determined in Step 4 in α1f1 + α2f2 + · · ·+ αmfmto obtain a particular integral of (9.1).
Remark 9.3. Note that if y is a solution of the homogeneous part of the equation (9.1),then it cannot be a particular integral of (9.1) (assuming F (x) is not identically zero).This is why we need to have Step 2 in the above procedure.
Problem 9.1. Solved2y
dx2− 2
dy
dx+ y = sinx.
Solution.
Step 1: Computing derivatives of f(x) = sinx, we find
f ′(x) = cosx, f ′′(x) = − sinx, . . .
The set of functions consisting of f itself and all linearly independent UC functionsof which the successive derivatives of f are either constant multiples or linear com-binations is given by {sinx, cosx}. Thus the UC set of the UC function sinx isobtained as S = {cosx, sinx}.
Step 2: Note that the functions in S, that is, sinx and cosx are not a solution of the
homogeneous equationd2y
dx2−2
dy
dx+y = 0, and hence we take N = S = {sinx, cosx}.
Step 3: Consider the linear combination
yp = α1 sinx+ α2 cosx. (9.3)
Step 4: Assuming yp = α1 sinx+α2 cosx to be a particular integral of the given equation,and substituting it in the equation, we obtain for all x
−α1 sinx− α2 cosx− 2α1 cosx+ 2α2 sinx+ α1 sinx+ α2 cosx = sinx
⇒ (2α2 − 1) sinx− 2α1 cosx = 0
⇒ α1 = 0, and α2 =1
2.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 59
Step 5: Thus a particular integral of the given equation is obtained as
yp =1
2cosx.
Since the general solution of the homogeneous equationd2y
dx2− 2
dy
dx+ y = 0 is
yc = (C1 + xC2)ex,
the general solution of the given equation is obtained as
y = yc + yp
= (C1 + xC2)ex +1
2cosx.
Remark 9.4. Consider the equationd2y
dx2− 2
dy
dx+ y = 6xex. We cannot use the above
method to solve it as 6xex is not an UC function. But we note that xex is an UC function,and hence 6xex is a constant multiple of a UC function. Therefore, we can use Theorem9.1 to a find a particular integral of it. In fact, we have the following method whennon-homogeneous part F (x) is a finite linear combination of UC functions.
Method 2
To determine a particular integral yp of the nonhomogeneous linear equation (9.1), whereF (x) is a finite linear combination of UC functions, we proceed as follows:
1. As F (x) is a finite linear combination of UC functions, F must be of the form
F (x) = c1F1(x) + c2F (x) + · · ·+ cmFm(x),
where Fi’s are UC functions.
2. Use the above presented method to find a particular integral of the equation
a0dny
dxn+ a1
dn−1y
dxn−1+ · · ·+ an−1
dy
dx+ any = Fi(x).
Let the particular integrals are fi, for 1 ≤ i ≤ m.
3. Then c1f1 + c2f2 + · · · cmfm is a particular integral of
a0dny
dxn+ a1
dn−1y
dxn−1+ · · ·+ an−1
dy
dx+ any = F (x).
Problem 9.2. Solved2y
dx2− 2
dy
dx+ y = 6xex.
Solution. Note that 6xex is not a UC function, but xex is. So, we first find a particular
integral f ofd2y
dx2− 2
dy
dx+ y = xex. Then, by Theorem 9.1, 6f will be the particular
integral ofd2y
dx2− 2
dy
dx+ y = 6xex.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 60
Step 1: Computing derivatives of f(x) = xex, we find
f ′(x) = xex + ex, f ′′(x) = xex + ex, . . .
The set of functions consisting of f itself and all linearly independent UC functionsof which the successive derivatives of f are either constant multiples or linear combi-nations is given by {xex, ex}. Thus the UC set of the UC function 6xex is obtainedas S = {xex, ex}.
Step 2: Note that ex, and xex are solutions of the homogeneous equation
d2y
dx2− 2
dy
dx+ y = 0. (9.4)
Moreover, x2(ex), and x2(xex) are not a solution of (9.4). Hence we take N ={x2ex, x3ex}.
Step 3: Consider the linear combination
yp = α1x2ex + α2x
3ex.
Step 4: Assuming yp = α1x2ex + α2x
3ex to be a particular integral of the equationd2y
dx2− 2
dy
dx+ y = xex, and substituting it in the equation, we obtain for all x
(6α2x+ 2α1)ex = xex
⇒ (6α2 − 1)x+ 2α1 = 0
⇒ α1 = 0, and α2 =1
6.
Step 5: Thus a particular integral of the equationd2y
dx2− 2
dy
dx+ y = xex is
yp =1
6x3ex.
Hence a a particular integral of the given equationd2y
dx2− 2
dy
dx+ y = 6xex is
yp = x3ex.
Since the general solution of the homogeneous equationd2y
dx2− 2
dy
dx+ y = 0 is
yc = (C1 + xC2)ex,
the general solution of the given equation is obtained as
y = yc + yp
= (C1 + xC2)ex + x3ex.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 61
Problem 9.3. Find a particular integral ofd2y
dx2− 2
dy
dx+ y = 12xex + 5 sinx.
Solution. Let y1, and y2 are particular integrals of the equationd2y
dx2− 2
dy
dx+ y = 6xex,
andd2y
dx2− 2
dy
dx+ y = sinx respectively. Then, by Theorem 9.1, a particular integral of
thed2y
dx2− 2
dy
dx+ y = 12xex + 5 sinx is obtained as
yp = 2y1 + 5y2.
From Problems 9.1 and 9.2, we have y1 = x3ex, and y2 = 12 cosx, and hence we obtain
yp = 2x3ex +5
2cosx.
Problem 9.4. Find a particular integral ofd2y
dx2+ y = |x|, x ∈ (−1, 1).
Solution. We solve above equation first for 0 ≤ x < 1, and then for −1 < x ≤ 0. For0 ≤ x < 1, above equation reduces to
d2y
dx2+ y = x. (9.5)
The UC set for the UC function x is {1, x}. Note that 1 and x are not solution of thehomogeneous part of the equation (9.5) hence we consider yp = α1 + α2x as a particularintegral of (9.5). Substituting yp and its derivatives in the equation (9.5), we obtain forall x ∈ [0, 1)
α1 + α2x = x
⇒ α1 = 0 and α2 = 1.
Thus a particular integral of (9.5) is
yp = x for x ∈ [0, 1). (9.6)
For 0 ≤ x < 1, above equation reduces to
d2y
dx2+ y = −x.
Proceeding similarly as above, we obtain a particular integral in this case as
yp = −x for x ∈ (−1, 0]. (9.7)
Combining (9.6) and (9.7), we obtain a particular integral in the interval (−1, 1) as
yp = |x|.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 62
9.2 The Method of Variation of Parameters
We concentrate on 2nd order equation but it can be applied to higher order ODE. This hasmuch more applicability than the method of undetermined coefficients. First, the ODEneed not be with constant coefficients. Second, the nonhomogeneos part F (x) can be amuch more general function.
Theorem 9.2. A particular solution yp to the linear ODE
d2y
dx2+ P (x)
dy
dx+Q(x)y = F (x) (9.8)
is given byyp = u(x)y1(x) + v(x)y2(x) (9.9)
where
1. y1 and y2 are two linearly independent solutions for the homogeneous counterpart
d2y
dx2+ P (x)
dy
dx+Q(x)y = 0.
2. u(x) = −∫
y2F (x)
W (y1, y2)dx
3. v(x) =
∫y1F (x)
W (y1, y2)dx.
Proof. We assume that yp given by
yp(x) = u(x)y1(x) + v(x)y2(x) (9.10)
where u(x) and v(x) are unknown functions, is a particular integral of (9.8).Differentiating (9.10), we obtain
y′p(x) = u′(x)y1(x) + v′(x)y2(x) + u(x)y′1(x) + v(x)y′2(x).
At this point, we impose a condition that
u′(x)y1(x) + v′(x)y2(x) = 0. (9.11)
Under the condition (9.11), we obtain y′p as
y′p(x) = u(x)y′1(x) + v(x)y′2(x). (9.12)
Differentiating (9.12), we obtain
y′′p(x) = u(x)y′′1(x) + v(x)y′′2(x) + u′(x)y′1(x) + v′(x)y′2(x). (9.13)
As we have assume that yp is a particular integral of (9.12), we substitute yp, y′p, and y′′p
into (9.8) (and using the fact that y1 and y2 are solution of the homogeneous part), weget
u′(x)y′1(x) + v′(x)y′2(x) = F (x). (9.14)

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 63
We solve for u′, v′ from (9.11) and (9.14) as follows (Cramer’s rule):
u′ = −F (x)y2(x)
W (y1, y2), v′ =
F (x)y1(x)
W (y1, y2).
Integrating, we find
u = −∫F (x)y2(x)
W (y1, y2)dx, v =
∫F (x)y1(x)
W (y1, y2)dx.
Substituting u and v in yp(x) = y1(x)u(x) + y2(x)v(x), we find the required form of ypgiven in (9.9).
Note 2. We don’t write constant of integration in the expression of u and v, since thesecan be absorbed with the constants of the general solution of the homogeneous part.
Note 3. The (leading) coefficient ofd2y
dx2in (9.8) must be unity. If it is not unity, then
make it unity by dividing the ODE by the leading coefficient.
Problem 9.5. Solved2y
dx2+ y = tanx
Solution. Two linearly independent solutions of the corresponding homogeneous equationare y1(x) = cosx, and y2(x) = sinx. Hence,
yp = y1(x)u(x) + y2(x)v(x),
where
u(x) = −∫
y2F (x)
W (y1, y2)dx, v(x) =
∫y1F (x)
W (y1, y2)dx.
Here W (y1, y2) = 1, and F (x) = tanx. Therefore,
u(x) = −∫
sinx tanx dx = −∫
[secx− cosx] dx = − ln | secx+ tanx|+ sinx
v(x) =
∫sinx dx = − cosx.
Thus, yp(x) = − cosx ln | secx+ tanx|, and hence the general solution is
y(x) = C1 cosx+ C2 sinx− cosx ln | secx+ tanx|.
Problem 9.6. Solve xd2y
dx2− (1 + x)
dy
dx+ y = x2e2x, x > 0
Solution. This is linear but the coefficients are not constants. Note that y1(x) = ex is asolution (by inspection!) of
xy′′ − (1 + x)y′ + y = 0. (9.15)
Using the reduction of order method, another independent solution of (9.15) is given by
y1
∫1
y21
e∫
( 1x
+1) dx = y1
∫1
y21
xex dx = y1
∫xe−x dx = −(x+ 1).

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 64
We can take y2 = 1 + x as the other linearly independent solution. Now we use themethod of variation of parameters to find the general solution of the given equation.Given equation can be written as
d2y
dx2− 1 + x
x
dy
dx+
1
xy = xe2x. (9.16)
Hence,yp = y1(x)u(x) + y2(x)v(x),
where
u(x) =
∫y2F (x)
W (y1, y2)dx, v(x) =
∫y1F (x)
W (y1, y2)dx.
Here W (y1, y2) = −xex, and F (x) = xe2x. Therefore,
u(x) =
∫(1 + x)ex dx = xex
v(x) = −∫
e2x dx = −1
2e2x.
Thus, yp(x) = x−12 e2x, and hence the general solution is
y(x) = C1ex + C2(x+ 1) +x− 1
2e2x.
Problem 9.7. Solved2y
dx2+ y = |x|, x ∈ (−1, 1).
Solution. Two linearly independent solutions of the corresponding homogeneous equationare y1(x) = cosx, and y2(x) = sinx. Hence,
yp = y1(x)u(x) + y2(x)v(x),
where
u(x) = −∫
y2F (x)
W (y1, y2)dx, v(x) =
∫y1F (x)
W (y1, y2)dx.
Here W (y1, y2) = 1, and F (x) = |x|. Therefore,
u(x) = −∫|x| sinx dx =
{−∫x sinx = x cosx− sinx if x ≥ 0∫
x sinx = −x cosx+ sinx if x < 0
v(x) =
∫|x| cosx dx =
{ ∫x cosx = x sinx+ cosx if x ≥ 0−∫x sinx = −x sinx− cosx if x < 0
Thus, yp(x) = |x|. Therefore, general solution is
y(x) = C1 cosx+ C2 sinx+ |x|.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 65
9.3 Cauchy-Euler Equation
Definition 9.3 (Cauchy-Euler Equation). An equation of the form
a0xn dny
dxn+ a1x
n−1 dn−1y
dxn−1+ · · ·+ an−1x
dy
dx+ any = F (x) (9.17)
where a0, a1, . . . , an are constants, is called a Cauchy-Euler equation.
Theorem 9.3. The transformation x = et reduces the equation (9.17) to a linear differ-ential equation with constant coefficients. In particular, the above transformation reducesthe 2nd order Cauchy-Euler equation
a0x2 d2y
dx2+ a1x
dy
dx+ a2y = F (x)
to the equation
a0d2y
dt2+ (a1 − a0)
dy
dt+ a2y = F (et)
Proof. We provide the proof for the 2nd order case. The proof in the general nth-ordercase proceeds in a similar fashion. Letting x = et, assuming x > 0, we have t = lnx. Then
dy
dx=
dy
dt
dt
dx=
1
x
dy
dt
⇒ xdy
dx=
dy
dt
and
d
dx[x
dy
dx] =
d
dx[dy
dt]
⇒ dy
dx+ x
d2y
dx2=
d2y
dt2dt
dx=
1
x
d2y
dt2
⇒ xdy
dx+ x2 d2y
dx2=
d2y
dt2
⇒ x2 d2y
dx2=
d2y
dt2− xdy
dx=
d2y
dt2− dy
dt
Substituting xdy
dx=
dy
dtand x2 d2y
dx2=
d2y
dt2− dy
dtin the given equation, we obtain
a0d2y
dt2+ (a1 − a0)
dy
dt+ a2y = F (et).
Method: To solve Cauchy-Euler equation
a0xn dny
dxn+ a1x
n−1 dn−1y
dxn−1+ · · ·+ an−1x
dy
dx+ any = F (x)
we proceed as follows:

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 66
1. Solution for x > 0.
(a) Use the transformation x = et, that is, t = lnx to transform it into a lineardifferential equation with constant coefficients.
(b) Solve this new equation.
(c) Substitute back t = lnx.
2. Solution for x < 0.
(a) Use the transformation x = −z.(b) Solve the transformed equation for z > 0 as described above.
(c) Substitute back z = −x.
Problem 9.8. Solve x2y′′ − 3xy′ + 4y = 0, x > 0.
Solution. Let x = et. Then t = lnx, xdy
dx=
dy
dtand x2 d2y
dx2=
d2y
dt2− dy
dt. Substituting
these in the given equation, we obtain
d2y
dt2− dy
dt− 3
dy
dt+ 4y = 0
⇒ d2y
dt2− 4
dy
dt+ 4y = 0.
This is a linear homogeneous equation with constant coefficients. Characteristic equationis m2−4m+4 = 0 and its roots are m = 2, 2. Therefore, general solution of Cauchy-Eulerequation is obtained as
y = C1e2t + C2te2t
= C1e2 lnx + C2 lnxe2 lnx (substituting back t = lnx)
= C1x2 + C2x
2 lnx.
Problem 9.9. Solve x2y′′ − xy′ − 3y = 0, x > 0.
Solution. Let x = et. Then t = lnx, xdy
dx=
dy
dtand x2 d2y
dx2=
d2y
dt2− dy
dt. Substituting
these in the given equation, we obtain
d2y
dt2− dy
dt− dy
dt− 3y = 0
⇒ d2y
dt2− 2
dy
dt− 3y = 0.
This is a linear homogeneous equation with constant coefficients. Characteristic equationis m2−2m−3 = 0 and its roots are m = −1, 3. Therefore, general solution of Cauchy-Eulerequation is obtained as
y = C1e−t + C2e3t
= C1e− lnx + C2e3 lnx (substituting back t = lnx)
= C11
x+ C2x
3.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 67
Problem 9.10. Solve x2y′′ − xy′ − 3y = 0, x < 0.
Solution. Let z = −x. Thendz
dx= −1, and
dy
dx=
dy
dz· dz
dx
= −dy
dzd2y
dx2=
d
dz
[dy
dx
]· dz
dx
=d
dz
[−dy
dz
]· dz
dx
=d2y
dz2.
Under this substitution, given equation reduces to
z2 d2y
dz2− zdy
dz− 3y = 0, z > 0.
As shown in Problem 9.9, the general solution of this equation is obtained as
y = C11
z+ C2z
3.
Hence substituting z = −x, we obtain the general solution of the given equation as
y = −C11
x− C2x
3
= D11
x+D2x
3, where D1 = −C1 and D2 = −C2.
Remark 9.5. An equation of the form
a0(αx+ β)2 d2y
dx2+ a1(αx+ β)
dy
dx+ a2y = 0
can be solved using the transformation t = (αx+ b) (cf. Problem 9.11).
Problem 9.11. Solve (2x− 3)2 d2y
dx2− 6(2x− 3)
dy
dx+ 12y = 0, for 2x− 3 > 0
Solution. Let t = 2x− 3. Thendt
dx= 2, and
dy
dx=
dy
dt· dt
dx
= 2dy
dtd2y
dx2=
d
dt
[dy
dx
]· dt
dx
=d
dt
[2
dy
dt
]· dt
dx
= 4d2y
dt2.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 68
Under this substitution, given equation reduces to
4t2d2y
dt2− 12t
dy
dt+ 12y = 0, t > 0. (9.18)
This is Cauchy-Euler equation with dependent variable y and independent variable t. Let
t = ez. Then z = ln t, tdy
dt=
dy
dzand t2
d2y
dt2=
d2y
dz2− dy
dz. Substituting these in the given
equation, we obtain
4d2y
dz2− 4
dy
dz− 12
dy
dz+ 12y = 0
⇒ 4d2y
dz2− 16
dy
dz+ 12y = 0.
This is a linear homogeneous equation with constant coefficients. Characteristic equationis 4m2 − 16m+ 12 = 0 and its roots are m = 1, 3. Therefore, general solution is obtainedas
y = C1ez + C2e3z
= C1eln t + C2e3 ln t (substituting back z = ln t)
= C1t+ C2t3
= C1(2x− 3) + C2(2x− 3)3 (substituting back t = 2x− 3)
Problem 9.12. Solve
x2y′′ − xy′ − 3y =lnx
x, x > 0. (9.19)
Solution. Using variation of parameters method:
In order to use the method of variation of parameters, we first need to put the equation(9.19) in the form (9.8). In order to do that, we divide equation (9.19) by x2 to obtain
y′′ − 1
xy′ − 3
x2y =
lnx
x3, x > 0. (9.20)
In Problem 9.9, we have seen that y1(x) = 1x , and y2(x) = x3 are two linearly independent
solutions of the homogeneous part of the equation (9.19), and hence linearly independentsolution of the homogeneous part of (9.20). Therefore, particular integral of the givenequation is given by
yp = y1(x)u(x) + y2(x)v(x),
where
u(x) = −∫
y2F (x)
W (y1, y2)dx, v(x) =
∫y1F (x)
W (y1, y2)dx.
Here W (y1, y2) = 4x, and F (x) = lnxx3
. Therefore,
u(x) = −∫
lnx
4xdx = −(lnx)2
8
v(x) =
∫lnx
4x5dx = − lnx
16x4− 1
64x4.

9 SOLUTION METHODS FOR NONHOMOGENEOUS LINEAR ODES 69
Hence
yp = −(lnx)2
8x− lnx
16x− 1
64x
Hence the general solution is
yp = C1y1 + C2y2 + yp
= C11
x+ C2x
3 − (lnx)2
8x− lnx
16x− 1
64x
= (C1 −1
64)1
x+ C2x
3 − (lnx)2
8x− lnx
16x
= A1
x+ C2x
3 − (lnx)2
8x− lnx
16x.
Using method of undetermined coefficients:[Note that for the given given equation F (x) = ln
x . Therefore, using transformation x = et,
we obtain F (t) = te−t, which is an UC function. This guarantee that we can use method
of undetermined coefficients to solve the given equation.]
Using the transformation x = et, equation (9.19) transformed to
dy
dt− 2
dy
dt− 3y = te−t. (9.21)
Clearly, e−x is a solution of the homogeneous part. Hence, we choose yp(t) = t(α1te−t +
α2e−t). Substituting, wend
e−t(−4α2 + 2α1 − 8α1x) = te−t
This gives −4b+ 2a = 0, −8a = 1 and thus a = −18 , b = −1
6 . Thus, the general solution is
y = C1e−t + C2e3t − te−t
16(2t+ 1)
=C1
x+ C2x
3 − lnx
16x(2 lnx+ 1).
Definition 9.4. Consider 2nd order homogeneous Cauchy-Euler equation
a0x2 d2y
dx2+ a1x
dy
dx+ a2y = 0. (9.22)
Then the equationa0m
2 + (a1 − a0)m+ a2 = 0 (9.23)
is called the characteristic equation of the Cauchy-Euler equation (9.22).
Theorem 9.4. Let m1,m2 be the roots of the characteristic equation (9.23). Then forx > 0, following holds.

10 REDUCTION OF ORDER 70
• Real and distinct roots: If m1 and m2 are real and distinct, then two linearlyindependent solutions of (9.22) are xm1 and xm2. Thus the general solution of (9.23)is
y = C1xm1 + C2x
m2 .
• Real and equal roots: If m1 and m2 are real and m1 = m2 = m, then two linearlyindependent solutions of (9.22) are xm and xm lnx. Thus the general solution of(9.22) is
y = xm(C1 + C2 lnx).
• Complex roots: If m1 and m2 are complex conjugate, say m1 = α + iβ, andm2 = α− iβ, then the general solution of (9.22) is
y = xα(C1 cos(β lnx) + C2 sin(β lnx)
).
Proof. We use the transformationx = et (9.24)
Then, by Theorem 9.24, equation (9.22) reduces to
a0d2y
dt2+ (a1 − a0)
dy
dt+ a2y = 0. (9.25)
Note that (9.25) is a linear homogeneous equation with constant coefficients. Moreover,its characteristics equation is given by (9.23). Let the roots m1,m2 of 9.23 are real anddistinct. Then the general solution of (9.25) is given by
y(t) = C1em1t + C1em2t.
Hence, again using the transformation x = et, we obtain the general solution of (9.22) as
y = C1xm1 + C2x
m2 .
Similarly one can prove for the other two cases (complete the proof).
10 Reduction of Order
Theorem 10.1 (Reduction of Order). Let f be a nontrivial solution of the second-orderhomogeneous linear differential equation
a0(x)d2y
dx2+ a1(x)
dy
dx+ a2(x)y = 0. (10.1)
Then the following holds
1. The transformation y = f(x)v reduces Equation (10.1) to the first order homoge-neous linear differential equation
a0(x)f(x)dw
dx+ [2a0(x)f ′(x) + a1(x)f(x)]w = 0 (10.2)
in the dependent variable w, where w =dv
dx.

10 REDUCTION OF ORDER 71
2. The particular solution
w =exp
[−∫ a1(x)a0(x) dx
][f(x)]2
of Equation (10.2) gives rise to the function v, where
v(x) =
∫ exp[−∫ a1(x)a0(x) dx
][f(x)]2
dx.
The function g defined by g(x) = f(x)v(x) is then a solution of the second-orderequation (10.1).
3. The original known solution f and the “new” solution g are linearly independentsolutions of (10.1), and hence the general solution of (10.1) can be expressed as thelinear combination
c1f + c2g.
Proof. Left as an Exercise.
Problem 10.1. Given that y = x is a solution of
(x2 + 1)d2y
dx2− 2x
dy
dx+ 2y = 0, (10.3)
find a linearly independent solution by reducing the order.
Solution. Let y = xv. Then
dy
dx= x
dv
dx+ v, and
d2y
dx2= x
d2v
dx2+ 2
dv
dx.
Substituting the expressions for y,dy
dx, and
d2y
dx2into Equation (10.3), we obtain
(x2 + 1)
(x
d2v
dx2+ 2
dv
dx
)− 2x
(x
dv
dx+ v
)+ 2xv = 0
or, x(x2 + 1)d2v
dx2+ 2
dv
dx= 0.
Letting w =dv
dx, we obtain the first-order homogeneous linear equation
x(x2 + 1)dw
dx+ 2w = 0.
Treating this as a separable equation, we obtain
dw
w= − 2dx
x(x2 + 1)
ordw
w=
(−2
x+
2x
x2 + 1
)dx.

10 REDUCTION OF ORDER 72
Integrating, we obtain the general solution
w =c(x2 + 1)
x2.
Choosing c = 1, we recall thatdv
dx= w and integrate to obtain the function v given by
v(x) = x− 1
x.
Now forming g = fv, where f(x) denotes the known solution x, we obtain the function gdefined by
g(x) = x
(x− 1
x
)= x2 − 1.
By Theorem 10.1, we know that this is the desired linearly independent solution. Thusthe general solution is given by
y = c1x+ c2(x2 − 1).
10.1 Reducible Second Order ODE
A general 2nd order ODE is of the form
F (x, y, y′, y′′) = 0.
In some cases, by making substitution, we can reduce this 2nd order ODE to a 1st orderODE. Few cases are described below
Case I: If the independent variable is missing, then we have F (y, y′, y′′) = 0. If we
substitute w = y′, then y′′ = wdw
dy. Hence, the ODE becomes F
(y, w,w
dw
dy
)= 0, which
is a 1st order ODE.
Problem 10.2. Solve 2yy′′ − y′2 − 4 = 0.

10 REDUCTION OF ORDER 73
Solution. With w = y′, the above equation becomes
2ywdw
dy− w2 − 4 = 0
⇒ 2w
w2 + 4dw =
dy
y
⇒∫
2w
w2 + 4dw =
∫dy
y+ C, where C is an arbitrary constant
⇒ ln(w2 + 4) = ln y + C
⇒ w2 + 4 = C0y, where C0 = eC .
⇒ w = ±√C0y − 4
⇒ dy
dx= ±
√C0y − 4
⇒∫
dy√C0y − 4
= ±dx+D
⇒ 2√C0y − 4
C0= ±x+D
Case II: If the dependent variable is missing, then we have F (x, y′, y′′) = 0. If we substi-
tute w = y′, then y′′ =dw
dx. Hence, the ODE becomes F
(x,w,
dw
dx
)= 0, which is a 1st
order ODE.
Problem 10.3. Solve xy′′ + 2y′ = 0.
Solution. Substitute w = y′, then we find
dw
dx+
2
xw = 0
⇒∫dw
w= −
∫2dx
x+ C where C is an arbitrary constant
⇒ w = C0x−2, where C0 = eC .
⇒ dy
dx= C0x
−2
⇒∫
dy =
∫C0x
−2 dx+D
⇒ y = −C0
x+D

11 LAPLACE TRANSFORM 74
11 Laplace Transform
Definition 11.1 (Laplace Transform). Let f be a real-valued function of the real variablet, defined for t > 0. Let s be a variable that we shall assume to be real, and consider thefunction F defined by
F (s) =
∫ ∞0
e−stf(t) dt, (11.1)
for all values of s for which this integral exists. The function F defined by the integral(11.1) is called the Laplace transform of the function f .
Notation 11.1. We shall use small letters to denote functions of x and the correspondingcapital letters to denote the laplace transforms of these functions. Sometime, we will alsodenote the Laplace transform F of f by L{f} and will denote F (s) by L{f(t)}.Remark 11.1.
1. Laplace transform is defined for complex valued function f(t) and the parameter scan also be complex. But we restrict our discussion only for the case in which f(t)is real valued and s is real.
2. Since the integral in (11.1) is an improper integral, existence of Laplace transformimplies that the following limit exists:
F (s) =
∫ ∞0
e−stf(t) dt = limR→∞
∫ R
0e−stf(t) dt.
Example 11.1. Consider the function defined by
f(t) =
{0 if 0 < t < a1 if t > a
Now,
F (s) =
∫ ∞0
e−stf(t) dt
= limR→∞
[∫ R
ae−st dt
]= lim
R→∞
[e−as
s− e−Rs
s
]=
e−as
s, for s > 0.
Thus, F (s) = e−as
s , s > 0.
Example 11.2. Consider f(t) = ta, a > −1. Then,
F (s) =
∫ ∞0
e−stta dt
=1
sa+1
∫ ∞0
e−uua+1−1 du
=Γ(a+ 1)
sa+1, s > 0.

11 LAPLACE TRANSFORM 75
Thus, F (s) = Γ(a+1)sa+1 , s > 0.
Example 11.3. Consider f(t) = 1. Then,
F (s) =
∫ ∞0
e−st dt
= limR→∞
[∫ R
0e−st dt
]= lim
R→∞
[−e−st
s
]R0
= limR→∞
[1
s− e−Rs
s
]=
1
s, for s > 0.
Therefore, L{1} = 1s , s > 0.
Example 11.4. Consider f(t) = eat. Then,
F (s) =
∫ ∞0
e(a−s)t dt
= limR→∞
[∫ R
0e(a−s)t dt
]
= limR→∞
[e(a−s)t
a− s
]R0
= limR→∞
[e(a−s)R
a− s− 1
a− s
]=
1
s− a, for s > a.
Therefore, L{eat} = 1s−a , s > a.
Example 11.5. Consider f(t) = sin at. Then,
F (s) =
∫ ∞0
e−st sin at dt
= limR→∞
[∫ R
0e−st sin at dt
]= lim
R→∞
[s
s2 + a2e−st
{sin at− a
scos at
}]R0
=a
s2 + a2, for s > 0.
Therefore, L{sin at} = as2+a2
, s > 0.

11 LAPLACE TRANSFORM 76
11.1 Existence of Laplace Transform
Definition 11.2 (Piecewise Continuous Function). A function f is piecewise continuouson a finite interval [a, b] if
1. The interval [a, b] can be divided into a finite number of subintervals a = t0 <t1 < t2 < · · · < tn = b such that f is continuous in each subinterval (ti, ti+1) fori = 0, 1, 2, . . . , n− 1
2. The function f has jump discontinuity at ti, thus∣∣∣∣ limt→ti+
f(t)
∣∣∣∣ <∞, i = 0, 1, . . . , n− 1;
∣∣∣∣ limt→ti−
f(t)
∣∣∣∣ <∞, i = 1, 2, . . . , n.
Note 4. If f is continuous on [a, b], then f is piecewise continuous on [a, b] (Why?).
Example 11.6. The function f defined by
f(t) =
t2 if 0 ≤ t ≤ 13− t if 1 < t ≤ 2t+ 1 if 2 < t ≤ 3
is piecewise continuous on [0, 3].
Example 11.7. The function f defined by
f(x) =
{1
2−t if 0 ≤ t < 2
t+ 1 if 2 ≤ t ≤ 3,
is NOT piecewise continuous on [0, 3], as limt→2− f(x) does not exist.
Definition 11.3 (Exponential Order). A function f is said to be of exponential order ifthere exists a constant α and positive constants t0 and M such that
|f(t)| < Meαt (11.2)
for all t > t0 at which f(t) is defined. More explicitly, if f is of exponential order corre-sponding to some definite constant α in (11.2), then we say that f is of exponential ordereαt.
Remark 11.2. Note that if f is of exponential order, then although f(x) may becomeinfinitely large as x → ∞, it must grow less rapidly than a multiple of some exponentialfunction eαt. We also note that if f is of exponential order eαt, then f is also of exponentialorder eβt for any β > α.
Example 11.8.
1. Every bounded function is of exponential order, with the constant α = 0. Thus,for example, sin bt and cos bt are of exponential order.

11 LAPLACE TRANSFORM 77
2. The function f such that f(t) = eat sin bt is of exponential order, with the constantα = a. For we then have
e−αt|f(t)| = e−αteαt| sin bt| = | sin bt|,
which is bounded for all t.
3. Consider the function f such that f(t) = tn, where n > 0. Then e−αt|f(t)| is e−αttn.For any α > 0, limt→∞ e−αttn = 0. Thus there exists M > 0 and t0 > 0 such that
e−αt|f(t)| = e−αttn < M
for t > t0. Hence f(t) = tn is of exponential order, with the constant α equal to anypositive number.
4. As f(t) = tn, where n > 0, is of exponential order, it follows that every polynomialis of exponential order.
5. The function f such that f(t) = et2
is not of exponential order, for in this casee−αt|f(t)| is et
2−αt and this becomes unbounded as t → ∞, no matter what is thevalue of α.
Theorem 11.1 (Existence Theorem for Laplace Transforms). Let f be a real functionthat has the following properties:
1. f is piecewise continuous in every finite closed interval 0 ≤ t ≤ b (b > 0).
2. f is of exponential order; that is, there exists α,M > 0, and t0 > 0 such that
|f(t)| < Meαt for t > t0.
Then the Laplace transform
F (s) =
∫ ∞0
e−stf(t) dt
of f exists for s > α.
Remark 11.3. We point out that the conditions on f described in the hypothesis ofTheorem 11.1 are not necessary for the existence of F (s). For example, consider f(t) = 1√
t,
which is not piecewise continuous in [0, a], where a > 0. But
F (s) =
∫ ∞0
e−st√tdt =
1√s
∫ ∞0
e−uu12−1 du =
Γ(12)√s
=
√π
s, s > 0.
[∵ Γ(p) =∫∞
0 e−ttp−1, p > 0, and Γ(12) =
√π]

11 LAPLACE TRANSFORM 78
Example 11.9. Consider the continuous function f(t) = et2. The Laplace transform of
f(t) does not exist. In fact, for s > 0,
I =
∫ ∞0
e−stet2dt
=
∫ ∞0
et2−st dt
=
∫ s
0et
2−st dt+
∫ ∞s
et2−st dt
≥∫ s
0et
2−st dt+
∫ ∞s
dt (∵ et2−st ≥ 1 for t ∈ (s,∞))
Thus I diverges as∫∞s dt diverges. Similarly, one can prove for s < 0.
11.2 Basic Properties of Laplace Transform
Theorem 11.2 (Linearity). Suppose F1(s) = L{f1(t)} exists for s > a1, and F2(s) =L{f2(t)} exists for s > a2. Then for any constants c1, c2
L{c1f1(t) + c2f2(t)} = c1F1(s) + c2F2(s),
for s > a, where a = max{a1, a2}.
Proof. Trivial.
Example 11.10. Consider f(t) = cosh(wt). Then
L{cosh(wt)} =1
2
(L{ewt}+ L{e−wt}
)=
1
2
(1
s− w+
1
s+ w
)=
s
s2 − w2.
Example 11.11. Consider f(t) = sinh(wt). Proceeding as above, we find F (s) = ws2−w2 .
Theorem 11.3 (First Shifting Theorem). Let f be such that L{f} exists for s > α. Thenfor any constant b,
L{
ebtf(t)}
= F (s− b)
for s > α+ b, where F (s) denotes L{f(t)}.
Proof. F (s) = L{f(t)} =∫∞
0 e−stf(t) dt. Replacing s by s− b, we have
F (s− b) =
∫ ∞0
e−(s−b)tf(t) dt =
∫ ∞0
e−st[ebtf(t)] dt = L{ebtf(t)}.
Example 11.12. Consider f(t) = e−5t cos(4t). Since L{cos 4t} = ss2+16
, we obtain
L{e−5t cos 4t} =s+ 5
(s+ 5)2 + 16.

11 LAPLACE TRANSFORM 79
ua(t)
ua(t) f(t)
ub(t)[ 1− ] f(t)
f(t)
ub(t)ua(t)
1
a t
[ − ] f(t)
b
Figure 6: Effects of unit step function on a function f(t). Here b > a
11.3 Unit Step Function ua(t)
Definition 11.4 (Unit Step Function). For each real number a, the unit step function(or Heaviside function) ua(t) is defined as
ua(t) =
{0 if t < a1 if t > a
This function acts as a mathematical ‘on-off’ switch as can be seen from the Figure 6.
Example 11.13. As shown in Example 11.1, for a > 0, L{ua(t)} = e−as
s , s > 0.
11.3.1 Step Function
A variety of so-called step functions can be expressed as suitable linear combinations ofthe unit step function ua. Then, using Theorem 11.2 (the linear property), and L{ua(t)},we can readily obtain the Laplace transform of such step functions, as explain in Example11.14.
Example 11.14. Consider the step function defined by
f(t) =
0 if 0 < t < 23 if 2 < t < 50 if t > 5

11 LAPLACE TRANSFORM 80
We may express the values of f in the form
f(t) =
0− 0 if 0 < t < 23− 0 if 2 < t < 53− 3 if t > 5
Thus f(t) can be expressed as the linear combination
3u2(t)− 3u5(t).
Hence we obtain
L{f(t)} = L{3u2(t)} − L{3u5(t)} =3e−2s
s− 3e−5s
s=
3
s
[e−2s − e−5s
].
Example 11.15. Consider the step function defined by
f(t) =
t2 if 0 ≤ t ≤ 1sin 2t if 1 < t ≤ πcos t if t > π
Now consider the function
g(t) =(u0(t)− u1(t)
)t2 +
(u1(t)− uπ(t)
)sin 2t+ uπ(t) cos t.
Note that f(t) = g(t) at all t except possibly at a finite number points t = 0, 1, π. Hence,using the property of Riemann integration, L{f(t)} = L{g(t)}. Now determine L{g(t)}.
11.3.2 Translation of a Function
Figure 7:
Consider the function f defined for t > 0. Suppose we consider the new function thatresults from translating the given function f a distance of a units in the positive direction

11 LAPLACE TRANSFORM 81
(that is, to the right) and then assigning the value 0 to the new function for t < a (cf.Figure 7). Then this new function is defined by
g(t) =
{0 if 0 < t < af(t− a) if t > a
Once can check that
ua(t)f(t− a) = g(t) =
{0 if 0 < t < af(t− a) if t > a
(11.3)
Concerning the Laplace transform of this function we have the following theorem.
Theorem 11.4 (Second Shifting Theorem). If L{f(t)} = F (s), then
L{ua(t)f(t− a)} = e−asF (s).
Proof. From the definition of Laplace transform
L{ua(t)f(t− a)} =
∫ ∞0
e−stua(t)f(t− a) dt
=
∫ ∞a
e−stf(t− a) dt
= e−as∫ ∞
0e−suf(u) du (using t− a = u)
= e−asF (s).
Remark 11.4. In applying Theorem 11.4 to a translated function of the form (11.3), onemust be certain that the functional values for t > a are indeed expressed in terms of t−a.In general, this will not be so, and if it is not, one must first express these functional valuesfor t > a so that this is so. We shall illustrate this in Example 11.16
Example 11.16. We find the Laplace transform of
g(t) =
{0 if 0 < t < 5t− 3 if t > 5
Before we can apply Theorem 11.4 to this translated function, we must express the func-tional values t − 3 for t > 5 in terms of t − 5, as required by (11.3). That is, we expresst− 3 as (t− 5) + 2 and write
g(t) =
{0 if 0 < t < 5(t− 5) + 2 if t > 5
This is now of the form (11.3), and we recognize it as
u5(t)f(t− 5) =
{0 if 0 < t < 5(t− 5) + 2 if t > 5
(11.4)

11 LAPLACE TRANSFORM 82
where f(t) = t+ 2, t > 0. Therefore,
L{g(t)} = L{u5(t)f(t− 5)}= e−5sL{f(t)} (using Theorem 11.4)
= e−5s[L{t}+ L{2}
]= e−5s
(1
s2+
2
s
).
11.3.3 Periodic Function
Definition 11.5. A function f is periodic of period P , where P > 0, if f(t + P ) = f(t)for every t for which f is defined.
Note that if f is periodic with period P , then for all integers n,
f(x+ nP ) = f(x).
Example 11.17. The functions defined by sin bt and cos bt are periodic of period 2πb .
Theorem 11.5. Suppose f is a periodic function of period P . If the Laplace transformof f exists, then
L{f(t)} =
∫ P0 e−stf(t) dt
1− e−Ps.
Proof.
F (s) =
∫ ∞0
e−stf(t) dt
=∞∑n=0
∫ (n+1)P
nPf(t)est dt
=
∞∑n=0
∫ P
0f(u+ nP )e−su−snP du (taking u = t− nP )
=∞∑n=0
e−snP∫ P
0f(u)e−su du
=
(∫ P
0f(u)e−su du
) ∞∑n=0
e−snP
=
∫ P0 e−stf(t) dt
1− e−Ps.
The last line follows from the fact that∑∞
n=0 e−snP is a geometric series with commonration e−sP < 1 for s > 0.
Example 11.18. Consider the function f defined by
f(t) =
{1 if 0 ≤ t < 2−1 if 2 ≤ t < 4

11 LAPLACE TRANSFORM 83
and for all other positive t by the periodicity condition f(t+ 4) = f(t). Then
L{f(t)} =
∫ 40 e−stf(t) dt
1− e−4s
=1
1− e−4s
[∫ 2
0e−st dt+
∫ 4
2e−st(−1) dt
]=
1− e−2s
s(1 + e−2s).
11.4 The Inverse Transform
Let F (s) be the Laplace transform of a function f(t) defined for t > 0. Then the functionf is called an inverse transform of F , and we use the notation L−1{F} to denote such afunction f , and L−1{F (s)} to denote f(t).
Theorem 11.6. If L{f(t)} = F (s), then F (s)→ 0 as s→∞.
Remark 11.5. Any function F (s) without this behaviour can not be Laplace transform
of a certain function. For example, ss−1 , sin s, s2
s2+1are not Laplace transform of any
function. Thus it follows that a given function F may not have an inverse transform.
Theorem 11.7 (Uniqueness of Laplace Transform). Let f(t) and g(t) be two functionssuch that F (s) = G(s) for all s > k. Then f(t) = g(t) at all t where both are continuous.
Remark 11.6. Thus if it is known that a given function F has a continuous inversetransform f , then f is the only continuous inverse transform of F .
Example 11.19. By Example 11.3, L{1} = 1s . Thus an inverse transform of the function
F defined by F (s) = 1s is the continuous function f defined for all t by f(t) = 1. Thus
by Theorem 11.7 there is no other continuous inverse transform of the function F suchthat F (s) = 1
s . However, discontinuous inverse transforms of this function F exist. Forexample, consider the function g defined as follows:
g(t) =
1 if 0 < t < 32 if t = 31 if t > 3.
Theorem 11.8 (Laplace Transform of Derivatives). Let f and its derivatives f (1), f (2),. . . , f (n−1) be continuous for t ≥ 0 and are all of exponential order eαt. Further supposethat f (n) is piecewise continuous in every finite closed interval [0, b], b > 0. Then Laplacetransform of f (n) exists for s > α and is given by
L{f (n)(t)} = snL{f(t)} − sn−1f(0)− sn−2f (1)(0)− sn−3f (2)(0)− · · · − f (n−1)(0).
Corollary 11.9. Let f(t) be continuous for t ≥ 0 and is of exponential order eαt. Furthersuppose that f is differentiable with f ′ piecewise continuous in every finite closed interval[0, b], b > 0. Then L{f ′} exists for s > α, and is given by
L{f ′(t)} = sL{f(t)} − f(0).

11 LAPLACE TRANSFORM 84
Example 11.20. We find the Laplace transform of f(t) = t coswt.Note that
f ′′(t) = −w2f(t)− 2w sinwt.
Taking Laplace transform on both sides, we find
L{f ′′(t)} = −w2L{f(t)} − 2wL{sinwt}
⇒ s2L{f(t)} − sf(0)− f ′(0) = −w2L{f(t)} − 2ww
s2 + w2(using L{sinwt} = w
s2+w2 )
⇒ s2L{f(t)} − 1 = −w2L{f(t)} − 2ww
s2 + w2(∵ f(0) = 0, f ′(0) = 1)
⇒ L{f(t)} =s2 − w2
(s2 + w2)2.
Theorem 11.10 (Derivative of the Laplace Transform). Suppose f is a function satisfyingthe hypotheses of Theorem 11.1, with Laplace transform F , where
F (s) =
∫ ∞0
e−stf(t) dt.
Then
L{tnf(t)} = (−1)ndn
dsn[F (s)].
Proof.
F (s) =
∫ ∞0
e−stf(t) dt
F ′(s) =d
ds
∫ ∞0
e−stf(t) dt
= (−1)
∫ ∞0
e−sttf(t) dt (using Leibniz rule:d
dθ
∫ b
af(x, θ) dx =
∫ b
afθ(x, θ) dx)
F ′′(s) = (−1)2
∫ ∞0
e−stt2f(t) dt
· · · = · · · · · ·
F (n)(s) = (−1)n∫ ∞
0e−sttnf(t) dt
Problem 11.1. Find Laplace transform of f(t) = tn, n = 1, 2, 3 . . . .
Solution. Recall that F (s) = L{1} = 1s . Therefore,
L{tn} = (−1)ndn
dsn[F (s)]
= (−1)ndn
dsn[1
s]
=n!
sn+1.

11 LAPLACE TRANSFORM 85
Problem 11.2. Find Laplace transform of f(t) = t coswt.
Solution. Recall that F (s) = L{coswt} = ss2+w2 . Therefore,
L(t coswt) = − d
dsF (s)
= − d
ds
[s
s2 + w2
]= −(s2 + w2)− 2s2
(s2 + w2)2
=s2 − w2
(s2 + w2)2.
Problem 11.3. Find the inverse Laplace transform of F (s) = ln(s−as−b
).
Solution. Let f(t) be the inverse Laplace transform of F (s), that is, L{f(t)} = F (s). Now,
F (s) = ln
(s− as− b
)= ln(s− a)− ln(s− b)
F ′(s) =1
s− a− 1
s− b= L{eat} − L{ebt} = L{eat − ebt}
⇒ L{tf(t)} = L{eat − ebt} (Using Theorem 11.10)
⇒ tf(t) = eat − ebt (Using Theorem 11.7)
⇒ f(t) =eat − ebt
t.
11.5 Convolution
Definition 11.6 (Convolution). Let f and g be two functions that are piecewise contin-uous on every finite closed interval [0, b] and of exponential order. The function denotedby f ∗ g and defined by
(f ∗ g)(t) =
∫ t
0f(τ)g(t− τ) dτ (11.5)
is called the convolution of the functions f and g.
Remark 11.7. It can be shown easily by means of the substitution u = t − τ thatf ∗ g = g ∗ f . Hence,
(f ∗ g)(t) =
∫ t
0g(τ)f(t− τ) dτ (11.6)
We use either (11.5) or (11.6) depending on which is easier to evaluate.

11 LAPLACE TRANSFORM 86
Theorem 11.11 (Convolution Theorem). Let the functions f and g be piecewise contin-uous on every finite closed interval [0, b] and of exponential order eat. Then
L{f ∗ g} = L{f}L{g}
for s > a.
Problem 11.4. Find inverse Laplace transform of 1(s+1)2
.
Solution. Let F (s) = 1s+1 , and f(t) = e−t. Note that L{f(t)} = F (s). Therefore,
L{f ∗ f} = L{f(t)}L{f(t)} =1
(s+ 1)2
Therefore, inverse Laplace transform of 1(s+1)2
is f ∗ f . Now we calculate f ∗ f .
(f ∗ f)(t) =
∫ t
0f(τ)f(t− τ) dτ
=
∫ t
0e−τe−t+τ dτ
=
∫ t
0e−t dτ
= te−t
Thus te−t is an inverse Laplace transform of 1(s+1)2
.
Problem 11.5. Find inverse Laplace transform of 1s(s+1)2
.
Solution. We write H(s) = F (s)G(s), where F (s) = 1s and G(s) = 1
(s+1)2. Thus f(t) = 1
and g(t) = te−t. Hence, using convolution theorem, we find
h(t) =
∫ t
0f(t− τ)g(τ) dτ =
∫ t
0τe−τ dτ = 1− (t+ 1)e−t.
Note 5. We have used f(t− τ)g(τ) in the convolution formula since f(t) = 1. This helpsa little bit in the evaluation of the integration.
11.6 Applications
Laplace transform may be applied to solve the initial-value problem consisting of the nth-order linear differential equation with constant coefficients, where initial conditions aregiven at the point 0. We proceed as follows:
1. Take the Laplace transform of both sides of the differential equation applying Corol-lary 11.8 and using the initial conditions in the process, and equate the results toobtain an algebraic equation in the “unknown” Y (s).
2. Solve the algebraic equation thus obtained to determine Y (s).

11 LAPLACE TRANSFORM 87
3. Having found Y (s), determine the solution y(t) = L−1{Y (s)} of the given initial-value problem.
Problem 11.6. Solve the IVP
y′′ + y = t, y(0) = 0, y′(0) = 2.
Solution. Let L{y(t)} = Y (s). Taking Laplace transform on both sides, we obtain
s2Y − sy(0)− y′(0) + Y =1
s2
⇒ s2Y − 2 + Y =1
s2
⇒ Y =2s2 + 1
s2(s2 + 1)
⇒ Y =1
s2+
1
s2 + 1⇒ y(t) = t+ sin t (taking inverse Laplace transform).
Aliter: In the method above, we evaluated Laplace transform of the nonhomogeneousterm in the right hand side. Now here we don’t evaluate it. Let g(t) be nonhomogeneousterm (in this case g(t) = t). Let G(s) be the Laplace transform of g. Now Take Laplacetransform on both sides. This gives
s2Y − sy(0)− y′(0) + Y = G(s)
⇒ Y =2
s2 + 1+
G(s)
s2 + 1⇒ y(t) = 2 sin t+ (f ∗ g)(t), where f(t) = sin t
(taking inverse Laplace transform).
⇒ y(t) = 2 sin t+
∫ t
0(t− τ) sin τ dτ
⇒ y(t) = t+ sin t.
Problem 11.7. Solve the IVP
y′′ + 9y = f(t), y(0) = 0, y′(0) = 4,
where
f(t) =
{8 sin t if 0 < t < π0 if t > π,
.

11 LAPLACE TRANSFORM 88
Solution. Here
f(t) = 8u0 sin t− 8uπ sin t
= 8u0 sin t− 8uπ sin(t− π + π)
= 8u0 sin t+ 8uπ sin(t− π)
∴ L{f(t)} = 8L{u0 sin t}+ 8L{uπ sin(t− π)}
= 81
s2 + 1+ 8
e−πs
s2 + 1(Using Theorem 11.4)
=8
s2 + 1
(1 + e−πs
).
(we can easily compute it directly as well).Let L{y(t)} = Y (s). Taking Laplace transform on both sides, we obtain
s2Y − sy(0)− y′(0) + 9Y =8(1 + e−πs)
1 + s2
⇒ s2Y − 4 + 9Y =8(1 + e−πs)
1 + s2
⇒ Y =3
s2 + 9+
1
s2 + 1+ e−πs
(1
s2 + 1− 1
s2 + 9
).
⇒ Y = L{sin 3t+ sin t}+ e−πsL{sin t− 1
3sin 3t}
(using Theorem 11.4)
⇒ Y = L{sin 3t+ sin t}+ L{uπ(t)
[sin(t− π)− 1
3sin 3(t− π)
]}⇒ Y = L{sin 3t+ sin t}+ L
{uπ(t)
[− sin t+
1
3sin 3t
]}⇒ y(t) = sin 3t+ sin t+ uπ(t)
[− sin t+
1
3sin 3t
]⇒ y(t) =
{sin 3t+ sin t if 0 ≤ t ≤ π43 sin 3t if t ≥ π,
Problem 11.8 (Variable coefficient). Solve the IVP
y′′ − 2xy′ + 4y = 0, y(0) = 1, y′(0) = 0.

11 LAPLACE TRANSFORM 89
Solution. Let L{y(t)} = Y (s). Taking Laplace transform on both sides, we obtain
s2Y − sy(0)− y′(0) + 2d
ds
(L{y′}
)+ 4Y = 0
(using Theorem 11.10)
⇒ s2Y − s+ 2d
ds
(L{y′}
)+ 4Y = 0
⇒ s2Y − s+ 2d
ds(sL{y} − y(0)) + 4Y = 0
⇒ s2Y − s+ 2d
ds(sY − 1) + 4Y = 0
⇒ s2Y − s+ 2
(Y − sdY
ds
)+ 4Y = 0
⇒ dY
ds+
(s
2+
3
s
)Y =
1
2
This is linear equation. Hence,
Y s3es2/4 =
1
2
∫s3es
2/4 ds+ C
⇒ Y =s2 − 4
s3+ C
e−s2/4
s3
⇒ Y =1
s− 4
s3+ C
e−s2/4
s3
Now it can be shown by Bromwich integral method (not in the syllabus) that
L{x2
2− 1
4
}=
e−s2/4
s3
Hence, we find
y(x) = (1− 2x2) + C
(x2
2− 1
4
)= (1− C
4) +
(C
2− 2
)x2
Now y(0) = 1 gives C = 4, and hence
y(x) = (1− 2x2).

11 LAPLACE TRANSFORM 90
Table 2: Laplace Transforms
Related Documents