Localization is Sensor Data Dimensionality Reduction Neal Patwari, Jessica Croft, and Piyush Agrawal Dept. of Electrical & Computer Engineering University of Utah, Salt Lake City, UT Sensing and Processing Across Networks S P A N at the University of Utah Motivation Improve Sensor Localization for large-scale environmental deployments. Sensor Location Needed to make sensor data meaningful, for greedy routing. Key limita- tions: 1. Low Device Cost 2. Low Configuration 3. Distributed Algorithm Sensor Data Pair-wise Environmental • • Sensor Location • Relative Absolute • Dimension Reduction Environmental Field Knowledge Key Insight: Location is essentially data dimension reduction! Data: Both Pairwise and Environmental What do we mean by data? • Ambient field data: e.g., Temp., Chemistry, Humidity, Sunlight, Acoustic, Seismic, RF Space-time • Active pair-wise meas’ts: Sig- nal strength, Propagation de- lay. Figure: Sensor deployed in Red Butte Canyon, Utah (a protected watershed). Red Butte Canyon Deployment Applications: Water Balance is key to understanding, reducing development impacts on water supply in Western U.S. Test deployment: • Stream water temp (above) indicates water absorption into ground. Space-time data provides more detailed stream wa- ter balance than previously attempted. Data Contains Location Information When a sensor data field has isotropic spatially-decaying cor- relation, Sensor measurements contain spatial information. (a) -105 -100 -95 39 40 41 42 43 44 45 46 Degrees Longitude Degrees Latitude -1 -0.5 0 0.5 1 (b) -105 -100 -95 39 40 41 42 43 44 45 46 Degrees Longitude Degrees Latitude -1 -0.5 0 0.5 1 • Above: Correlation of daily precipitation totals with (a) Merri- man, NE, and (b) Highmore, SD. Use meas’ts {v i } to find ‘data distances’: δ i,j = kv i - v j k, ∀i 6= j with some appropriate distance metric, e.g., Euclidean, l p , .... What is Data Dimension Reduction? Nonlinear Dimensionality Reduction: Pre- serve nearest-neighbor relationships in a lower dimension: 1. Measure M data points over time, mode. 2. Compute weights and/or distances btwn neighboring points. 3. Non-linear dimensionality reduction (i.e., Isomap, Laplacian Eigenmaps, dwMDS) to generate 2-D or 3-D coords. 4. Rotate, translate, and scale to match. {} v i i Data Vectors Calc Neighbor Distances, Weights Reduce Dimension to 2D or 3D Rotate, Scale, & Translate { } d ij ij ,w ij {} x i i {} x i i Distributed Weighted Multi-dimensional Scaling Implementation of a robust distributed sensor localization al- gorithm on a network of wireless sensors running TinyOS with NO CENTRALIZED COMPUTATION. Features [Costa 06]: • Fully distributed measurement, commun., and calculation; • Constant per-node complexity: O (k ) for k neighbors; • Robustness to poor pair-wise distance estimates; • Convergence: Cost is non-increasing in each round. Distance Estimation from Averaged RSS δ MLE i,j = d 0 10 P 0 -P i,j 10n p • n p : Path-loss exponent, • P 0 : Received power (dBm) at distance d 0 (1 m). • First measurement set used to estimate {n p , Π 0 }. • Frequency Averaging: Hop & Average P i,j across band. • Time Averaging. Cons: Latency, non-ergodic signal. • Reciprocal Averaging: Average P i,j with P j,i . dwMDS Algorithm Calculation Global cost S = ∑ i S i , a sum of Local cost functions: S i = X i w i,j ‡ kz i - z j k- δ MLE i,j · 2 + r i kz i - z i k 2 Constants w i,j from LOESS. Majorization-based optimization. S i is minimized by a simple weighted average of coordinates of sensor i’s neighbors. z (m+1) i = b i z (m) i + X j ∈H (i) b j z (m) j Requires O (k ) multiplies and adds in each round, where k is the number of neighbors. Experiment: Sensor Data Measurements Setup: Use US historical climatology weather stations data 1221 stations collect daily • Total precipitation • Total snowfall • Minimum and maximum temperature From 66 Sensors in Nebraska and South Dakota, Test Isomap [Tenenbaum 00] and dwMDS [Costa 06] algorithms using temp. midpoint, i.e., 1 2 (max + min) (a) -105 -100 -95 38 39 40 41 42 43 44 45 46 47 Degrees Longitude Degrees Latitude (b) -105 -100 -95 39 40 41 42 43 44 45 46 47 Degrees Longitude Degrees Latitude Figure: Actual (•) and estimated (—-x) coordinates of unknown-location nodes for (a) dwMDS, and (b) Isomap, algorithms. Rotated for best match. Achieved RMS location error of (a) 0.69 and (b) 1.07 degrees. Future Directions • Apply with short-term, small-scale field meas’t sets. • Eg. App: RF meast’s for dynamic spectrum access. • Use sensor data coordinates for routing. • RF Tomographic Imaging. Experiment: Direct Pairwise Measurements Setup: Sensors (Crossbow mica2) in grass, in 6 by 6 grid, in a 6.7 m by 6.7 m. Four known-location nodes (in corners) 10 12 14 16 18 9 10 11 12 13 14 15 16 17 18 X Position (m) Y Position (m) Figure: Actual (•) and estimated (—x) coordinates of unknown-location nodes, along with reference coordinates (x). Achieved RMSE of 55.3 cm. Conclusion • Sensor data can help map sensor locations • Use both RF pairwise and environmental field meas’ts • Dimension reduction provides the general framework TinyOS Module Available: Contact [email protected]. References • N. Patwari and A. O. Hero III, “Manifold learning algorithms for localization in wireless sensor networks,” in IEEE Intl. Conf. on Acoustic, Speech, & Signal Processing (ICASSP’04), vol. 3, May 2004, pp. 857–860. • J. A. Costa, N. Patwari, and A. O. Hero III, “Distributed multidi- mensional scaling with adaptive weighting for node localization in sensor networks,” ACM/IEEE Trans. Sensor Networks, vol. 2, no. 1, pp. 39–64, Feb. 2006. • Y. Baryshnikov and J. Tan, “Localization for Anchoritic Sensor Networks,” arXiv:cs/0608014v1 [cs.NI], Aug. 2, 2006. • J. B. Tenenbaum, V. De Silva and J. C. Langford, “A global ge- ometric framework for nonlinear dimensionality reduction,” Sci- ence 290 (5500), pp. 2319-2323, 2000. • C. N. Williams Jr., M. J. Menne, R. S. Vose, and D. R. Easterling, “United States Historical Climatol- ogy Network Daily Temperature, Precipitation, and Snow Data,” ORNL/CDIAC-118, NDP-070, 2006, http://cdiac.ornl.gov/epubs/ndp/ushcn/usa.html.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Localization is Sensor Data Dimensionality ReductionNeal Patwari, Jessica Croft, and Piyush Agrawal
Dept. of Electrical & Computer EngineeringUniversity of Utah, Salt Lake City, UT
Sensing and Processing Across Networks
S P A N
at the University of Utah
MotivationImprove Sensor Localization for large-scale environmentaldeployments.Sensor Location Needed tomake sensor data meaningful,for greedy routing. Key limita-tions:
1. Low Device Cost
2. Low Configuration
3. Distributed Algorithm
Sensor DataPair-wiseEnvironmental
••
Sensor Location• Relative
Absolute•
Dimension Reduction
EnvironmentalField Knowledge
Key Insight: Location is essentially data dimension reduction!
Data: Both Pairwise and Environmental
What do we mean by data?
• Ambient field data: e.g.,Temp., Chemistry, Humidity,Sunlight, Acoustic, Seismic,RF Space-time
• Active pair-wise meas’ts: Sig-nal strength, Propagation de-lay.
Figure: Sensor deployed inRed Butte Canyon, Utah (aprotected watershed).
Red Butte Canyon Deployment Applications:Water Balance is key to understanding, reducing developmentimpacts on water supply in Western U.S. Test deployment:
• Stream water temp (above) indicates water absorption intoground. Space-time data provides more detailed stream wa-ter balance than previously attempted.
Data Contains Location Information
When a sensor data field has isotropic spatially-decaying cor-relation, Sensor measurements contain spatial information.
(a)−105 −100 −9539
40
41
42
43
44
45
46
Degrees Longitude
Deg
rees
Lat
itude
−1
−0.5
0
0.5
1
(b)−105 −100 −9539
40
41
42
43
44
45
46
Degrees Longitude
Deg
rees
Lat
itude
−1
−0.5
0
0.5
1
• Above: Correlation of daily precipitation totals with (a) Merri-man, NE, and (b) Highmore, SD.
Use meas’ts {vi} to find ‘data distances’:
δi,j = ‖vi − vj‖, ∀i 6= j
with some appropriate distance metric, e.g., Euclidean, lp, . . ..
What is Data Dimension Reduction?Nonlinear Dimensionality Reduction: Pre-serve nearest-neighbor relationships in alower dimension:
1. Measure M data points over time,mode.
2. Compute weights and/or distances btwnneighboring points.
3. Non-linear dimensionality reduction (i.e.,Isomap, Laplacian Eigenmaps, dwMDS)to generate 2-D or 3-D coords.
4. Rotate, translate, and scale to match.
{ }vi iData Vectors
Calc NeighborDistances, Weights
Reduce Dimensionto 2D or 3D
Rotate, Scale, &Translate
{ }dij ij,w ij
{ }xi i
{ }xi i
Distributed Weighted Multi-dimensionalScaling
Implementation of a robust distributed sensor localization al-gorithm on a network of wireless sensors running TinyOS withNO CENTRALIZED COMPUTATION. Features [Costa 06]:
• Fully distributed measurement, commun., and calculation;
• Constant per-node complexity: O(k) for k neighbors;
• Robustness to poor pair-wise distance estimates;
• Convergence: Cost is non-increasing in each round.
Distance Estimation from Averaged RSS
δMLEi,j = d010
P0−Pi,j10np
• np: Path-loss exponent,
• P0: Received power (dBm) at distanced0 (1 m).
• First measurement set used to estimate {np, Π0}.
• Frequency Averaging: Hop & Average Pi,j across band.
• Time Averaging. Cons: Latency, non-ergodic signal.
• Reciprocal Averaging: Average Pi,j with Pj,i.
dwMDS Algorithm CalculationGlobal cost S =
∑i Si, a sum of Local cost functions:
Si =∑
i
wi,j
(‖zi − zj‖ − δMLE
i,j
)2+ ri‖zi − zi‖2
Constants wi,j from LOESS. Majorization-based optimization.
Si is minimized by a simple weighted average of coordinates ofsensor i’s neighbors.
z(m+1)i = biz
(m)i +
∑
j∈H(i)
bjz(m)j
Requires O(k) multiplies and adds in each round, where k isthe number of neighbors.
Experiment: Sensor Data MeasurementsSetup: Use US historical climatology weather stations data1221 stations collect daily
• Total precipitation
• Total snowfall
• Minimum and maximum temperature
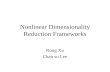
From 66 Sensors in Nebraska and South Dakota, Test Isomap[Tenenbaum 00] and dwMDS [Costa 06] algorithms usingtemp. midpoint, i.e., 1
2(max + min)
(a)−105 −100 −9538
39
40
41
42
43
44
45
46
47
Degrees Longitude
Deg
rees
Lat
itude
(b)−105 −100 −9539
40
41
42
43
44
45
46
47
Degrees Longitude
Deg
rees
Lat
itude
Figure: Actual (•) and estimated (—-x) coordinates ofunknown-location nodes for (a) dwMDS, and (b) Isomap,
algorithms. Rotated for best match. Achieved RMS location errorof (a) 0.69 and (b) 1.07 degrees.
Future Directions
• Apply with short-term, small-scale field meas’t sets.
• Eg. App: RF meast’s for dynamic spectrum access.
• Use sensor data coordinates for routing.
• RF Tomographic Imaging.
Experiment: Direct PairwiseMeasurements
Setup: Sensors (Crossbow mica2) in grass, in 6 by 6 grid, in a6.7 m by 6.7 m. Four known-location nodes (in corners)
10 12 14 16 189
10
11
12
13
14
15
16
17
18
X Position (m)
Y P
ositi
on (
m)
Figure: Actual (•) and estimated (—x) coordinates ofunknown-location nodes, along with reference coordinates (x).
Achieved RMSE of 55.3 cm.
Conclusion
• Sensor data can help map sensor locations
• Use both RF pairwise and environmental field meas’ts
• Dimension reduction provides the general framework
TinyOS Module Available: Contact [email protected].
References
• N. Patwari and A. O. Hero III, “Manifold learning algorithms forlocalization in wireless sensor networks,” in IEEE Intl. Conf. onAcoustic, Speech, & Signal Processing (ICASSP’04), vol. 3,May 2004, pp. 857–860.
• J. A. Costa, N. Patwari, and A. O. Hero III, “Distributed multidi-mensional scaling with adaptive weighting for node localizationin sensor networks,” ACM/IEEE Trans. Sensor Networks, vol. 2,no. 1, pp. 39–64, Feb. 2006.
• Y. Baryshnikov and J. Tan, “Localization for Anchoritic SensorNetworks,” arXiv:cs/0608014v1 [cs.NI], Aug. 2, 2006.
• J. B. Tenenbaum, V. De Silva and J. C. Langford, “A global ge-ometric framework for nonlinear dimensionality reduction,” Sci-ence 290 (5500), pp. 2319-2323, 2000.
• C. N. Williams Jr., M. J. Menne, R. S. Vose, andD. R. Easterling, “United States Historical Climatol-ogy Network Daily Temperature, Precipitation, andSnow Data,” ORNL/CDIAC-118, NDP-070, 2006,http://cdiac.ornl.gov/epubs/ndp/ushcn/usa.html.
Related Documents