Matrices and Matrix Algebra Determinants I Linear Algebra. Session 3 Dr. Marco A Roque Sol 01/30/2018 Dr. Marco A Roque Sol Linear Algebra. Session 3

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Matrices and Matrix AlgebraDeterminants I
Linear Algebra. Session 3
Dr. Marco A Roque Sol
01/30/2018
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix
D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn)
is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible
if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif
all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are
nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero;
di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D
is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible
then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting diagonal matrices
Theorem 3.1A diagonal matrix D = diag(d1, d2, · · · .dn) is invertible if and onlyif all diagonal entries are nonzero; di 6= 0 for 1 ≤ i < n
If D is invertible then D−1 = diag(d−11 , d−12 , · · · .d−1n )
d1 0 · · · 00 d2 · · · 0...
.... . .
...0 0 · · · dn
−1
=
d−11 0 · · · 0
0 d−12 · · · 0...
.... . .
...0 0 · · · d−1n
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If
all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,
then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)
diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )
diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now
suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that
di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0,
for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i .
Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then
for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any
n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB,
the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB
is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero.
Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence
DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
If all di 6= 0,then clearly,
diag(d1, d2, · · · .dn)diag(d−11 , d−12 , · · · .d−1n ) =
diag(1, 1, · · · .1) = In
diag(d−11 , d−12 , · · · , d−1n )diag(d1, d2, · · · .dn) =
diag(1, 1, · · · .1) = In
Now suppose that di = 0, for some i . Then for any n × n matrixB, the ith row of the matrix DB is zero. Hence DB 6= In. �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant
of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)
is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by
det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and
defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by
det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)
is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible
if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if
det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 .
If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0,
then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Inverting 2× 2 matrices
The determinant of a 2× 2 matrix
A =
(a bc d
)is denoted by det(A) and defined by det(A) = ad − bc
Theorem 3.2
A matrix
A =
(a bc d
)is invertible if and only if det(A) 6= 0 . If det(A) 6= 0, then
A−1 =
(a bc d
)−1=
1
ad − bc
(d −b−c a
)−1Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B
the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)
then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)
In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case
det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0
we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case
det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0
the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0
⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒
(A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0
⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒
(A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒
(I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒
B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0
⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒
B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0,
but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix
is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!!
�
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
proof
Let B the matrix
B =
(d −b−c a
)then
AB = BA =
(ad − bc 0
0 ad − bc
)In the case det(A) = ad − bc 6= 0 we have A−1 = [det(A)]−1B
In the case det(A) = ad − bc = 0 the matrix A is non invertible asotherwise⇒ AB = 0 ⇒ (A−1(AB) = A−10 = 0⇒ (A−1A)B = 0 ⇒ (I2B = 0 ⇒ B = 0⇒ B = 0, but the zero matrix is singular !!!!! �
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔ Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔ Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔
Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔ Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔ Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔ Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔ Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔ Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔ Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
System of n linear equations in n variables:a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...am1x1 + am2x2 + · · ·+ amnxn = bm
⇔ Ax = b
where
A =
a11 a12 · · · a1na21 a22 · · · a2n
...an1 an2 · · · ann
x =
x1x2...xn
b =
b1b2...bn
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Theorem 3.3
If the matrix A above, is invertible then the system has a uniquesolution, which is x = A−1b
General results on inverse matrices
Theorem 3.4
Given an n × n matrix A, the following conditions are equivalent:
(i) A is invertible.
(ii) x = 0 is the only solution of the matrix equation Ax = 0.
(iii) The matrix equation Ax = b has a unique solution for anyn-dimensional column vector b.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Theorem 3.3
If the matrix A above, is invertible then the system has a uniquesolution, which is x = A−1b
General results on inverse matrices
Theorem 3.4
Given an n × n matrix A, the following conditions are equivalent:
(i) A is invertible.
(ii) x = 0 is the only solution of the matrix equation Ax = 0.
(iii) The matrix equation Ax = b has a unique solution for anyn-dimensional column vector b.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Theorem 3.3
If the matrix A above, is invertible then the system has a uniquesolution, which is x = A−1b
General results on inverse matrices
Theorem 3.4
Given an n × n matrix A, the following conditions are equivalent:
(i) A is invertible.
(ii) x = 0 is the only solution of the matrix equation Ax = 0.
(iii) The matrix equation Ax = b has a unique solution for anyn-dimensional column vector b.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Theorem 3.3
If the matrix A above, is invertible then the system has a uniquesolution, which is x = A−1b
General results on inverse matrices
Theorem 3.4
Given an n × n matrix A, the following conditions are equivalent:
(i) A is invertible.
(ii) x = 0 is the only solution of the matrix equation Ax = 0.
(iii) The matrix equation Ax = b has a unique solution for anyn-dimensional column vector b.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Theorem 3.3
If the matrix A above, is invertible then the system has a uniquesolution, which is x = A−1b
General results on inverse matrices
Theorem 3.4
Given an n × n matrix A, the following conditions are equivalent:
(i) A is invertible.
(ii) x = 0 is the only solution of the matrix equation Ax = 0.
(iii) The matrix equation Ax = b has a unique solution for anyn-dimensional column vector b.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Theorem 3.3
If the matrix A above, is invertible then the system has a uniquesolution, which is x = A−1b
General results on inverse matrices
Theorem 3.4
Given an n × n matrix A, the following conditions are equivalent:
(i) A is invertible.
(ii) x = 0 is the only solution of the matrix equation Ax = 0.
(iii) The matrix equation Ax = b has a unique solution for anyn-dimensional column vector b.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Theorem 3.3
If the matrix A above, is invertible then the system has a uniquesolution, which is x = A−1b
General results on inverse matrices
Theorem 3.4
Given an n × n matrix A, the following conditions are equivalent:
(i) A is invertible.
(ii) x = 0 is the only solution of the matrix equation Ax = 0.
(iii) The matrix equation Ax = b has a unique solution for anyn-dimensional column vector b.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Theorem 3.3
If the matrix A above, is invertible then the system has a uniquesolution, which is x = A−1b
General results on inverse matrices
Theorem 3.4
Given an n × n matrix A, the following conditions are equivalent:
(i) A is invertible.
(ii) x = 0 is the only solution of the matrix equation Ax = 0.
(iii) The matrix equation Ax = b has a unique solution for anyn-dimensional column vector b.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Theorem 3.3
If the matrix A above, is invertible then the system has a uniquesolution, which is x = A−1b
General results on inverse matrices
Theorem 3.4
Given an n × n matrix A, the following conditions are equivalent:
(i) A is invertible.
(ii) x = 0 is the only solution of the matrix equation Ax = 0.
(iii) The matrix equation Ax = b has a unique solution for anyn-dimensional column vector b.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose
that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of
elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations
converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A
into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix.
Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then
the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence of
operations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts
the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix
into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
(iv) The row echelon form of A has no zero rows.has a unique solution for any n-dimensional column vector b
(v) The reduced row echelon form ofA is the identity matrix.
Theorem 3.5
Suppose that a sequence of elementary row operations converts amatrix A into the identity matrix. Then the same sequence ofoperations converts the identity matrix into the inverse matrix A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
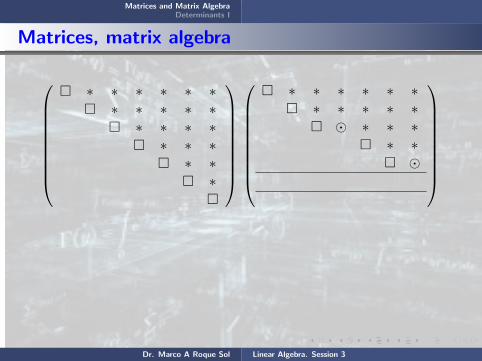
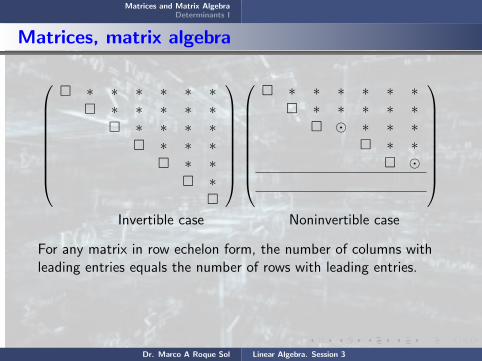
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
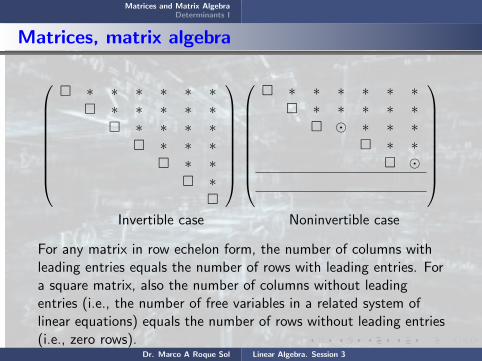
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix
in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form,
the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns
withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries
equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows
with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries.
Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix,
also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries
(i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables
in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system
oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations)
equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of
rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries
(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
For any matrix in row echelon form, the number of columns withleading entries equals the number of rows with leading entries. Fora square matrix, also the number of columns without leadingentries (i.e., the number of free variables in a related system oflinear equations) equals the number of rows without leading entries(i.e., zero rows).
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence
the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form
of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A
is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or
else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row.
In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case,
theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3
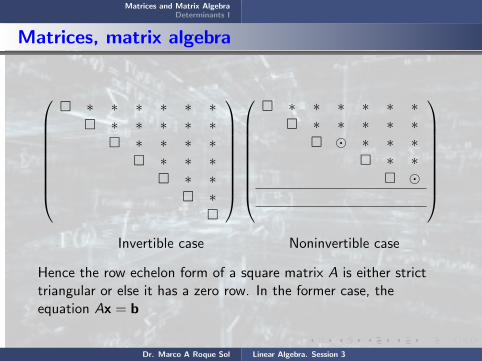
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b
always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has
a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution.
Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3
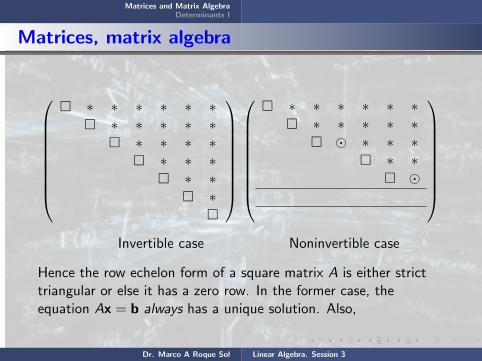
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also,
in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase
the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3
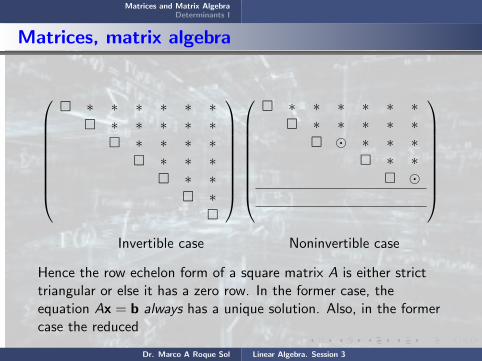
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced
row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form
of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is
I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
Invertible case Noninvertible case
Hence the row echelon form of a square matrix A is either stricttriangular or else it has a zero row. In the former case, theequation Ax = b always has a unique solution. Also, in the formercase the reduced row echelon form of A is I .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check
whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,
given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by
3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it
to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row:
1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row:
1 0 10 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Example 3.2
Check whether the matrix A,given by 3 −2 11 0 1−2 3 0
is invertible.
Solution
We convert it to row echelon form.
Interchange the 1st row with the 2nd row: 1 0 13 −2 1−2 3 0
Add −3 times the 1st row to the 2nd row: 1 0 1
0 −2 −3−2 3 0
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add 2 times the 1st row to the 3rd row : 1 0 10 −2 −30 3 2
Multiply the 2nd row by −1/2 : 1 0 1
0 1 3/20 3 2
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add 2 times the 1st row to the 3rd row :
1 0 10 −2 −30 3 2
Multiply the 2nd row by −1/2 : 1 0 1
0 1 3/20 3 2
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add 2 times the 1st row to the 3rd row : 1 0 10 −2 −30 3 2
Multiply the 2nd row by −1/2 : 1 0 10 1 3/20 3 2
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add 2 times the 1st row to the 3rd row : 1 0 10 −2 −30 3 2
Multiply the 2nd row by −1/2 :
1 0 10 1 3/20 3 2
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add 2 times the 1st row to the 3rd row : 1 0 10 −2 −30 3 2
Multiply the 2nd row by −1/2 : 1 0 1
0 1 3/20 3 2
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 1
0 1 3/20 0 1
We already know that the matrix A is invertible. Lets proceedtowards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row:
1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 1
0 1 3/20 0 1
We already know that the matrix A is invertible. Lets proceedtowards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 10 1 3/20 0 1
We already know that the matrix A is invertible. Lets proceedtowards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3
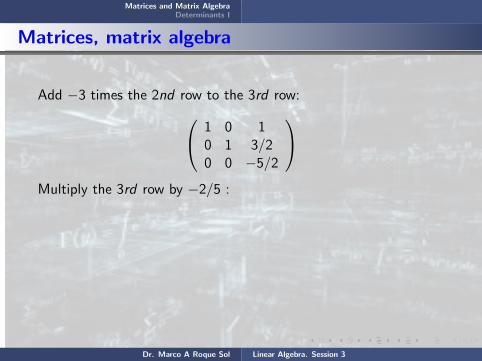
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 :
1 0 10 1 3/20 0 1
We already know that the matrix A is invertible. Lets proceedtowards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3
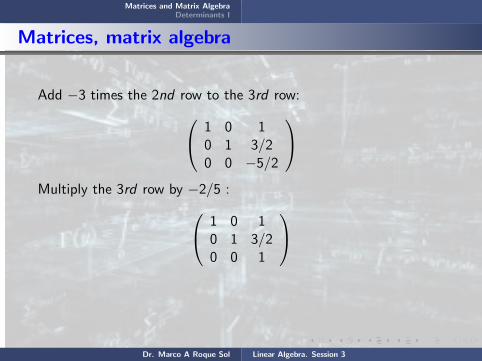
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 1
0 1 3/20 0 1
We already know that the matrix A is invertible. Lets proceedtowards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 1
0 1 3/20 0 1
We already know t
hat the matrix A is invertible. Lets proceedtowards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 1
0 1 3/20 0 1
We already know that the matrix A
is invertible. Lets proceedtowards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3
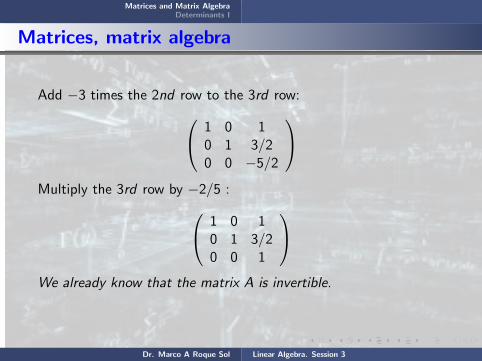
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 1
0 1 3/20 0 1
We already know that the matrix A is invertible.
Lets proceedtowards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 1
0 1 3/20 0 1
We already know that the matrix A is invertible. Lets proceed
towards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3
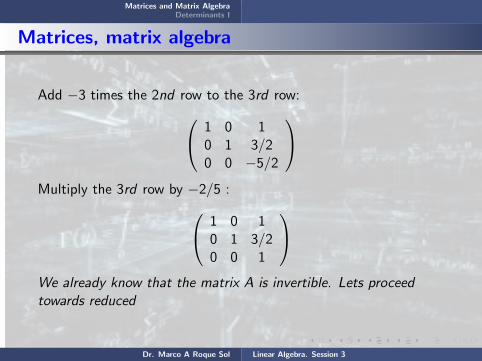
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 1
0 1 3/20 0 1
We already know that the matrix A is invertible. Lets proceedtowards reduced
row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3 times the 2nd row to the 3rd row: 1 0 10 1 3/20 0 −5/2
Multiply the 3rd row by −2/5 : 1 0 1
0 1 3/20 0 1
We already know that the matrix A is invertible. Lets proceedtowards reduced row echelon form .
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row:
1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 00 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row:
1 0 00 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3
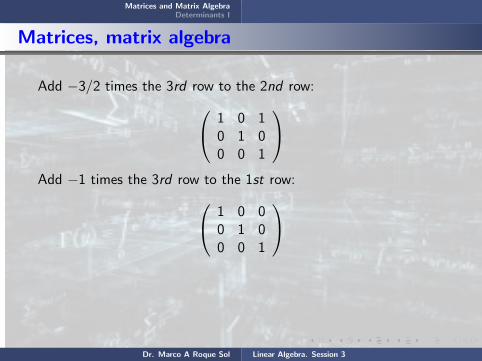
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1,
in this case, we need to apply the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case,
we need to apply the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need
to apply the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need to apply
the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of
elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of elementary row operations
( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of elementary row operations ( same applied to A before)
to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of elementary row operations ( same applied to A before)to the
identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Add −3/2 times the 3rd row to the 2nd row: 1 0 10 1 00 0 1
Add −1 times the 3rd row to the 1st row: 1 0 0
0 1 00 0 1
To obtain A−1, in this case, we need to apply the followingsequence of elementary row operations ( same applied to A before)to the identity matrix:
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1) Interchange the 1st row with the 2nd row.
2) Add −3 times the 1st row to the 2nd row.
3) Add 2 times the 1st row to the 3rd row.
4) Multiply the 2nd row by −1/2 :
5) Add −3 times the 2nd row to the 3rd row.
6) Multiply the 3rd row by −2/5
7) Add −3/2 times the 3rd row to the 2nd row.
8) Add −1 times the 3rd row to the 1st row.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1) Interchange the 1st row with the 2nd row.
2) Add −3 times the 1st row to the 2nd row.
3) Add 2 times the 1st row to the 3rd row.
4) Multiply the 2nd row by −1/2 :
5) Add −3 times the 2nd row to the 3rd row.
6) Multiply the 3rd row by −2/5
7) Add −3/2 times the 3rd row to the 2nd row.
8) Add −1 times the 3rd row to the 1st row.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1) Interchange the 1st row with the 2nd row.
2) Add −3 times the 1st row to the 2nd row.
3) Add 2 times the 1st row to the 3rd row.
4) Multiply the 2nd row by −1/2 :
5) Add −3 times the 2nd row to the 3rd row.
6) Multiply the 3rd row by −2/5
7) Add −3/2 times the 3rd row to the 2nd row.
8) Add −1 times the 3rd row to the 1st row.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1) Interchange the 1st row with the 2nd row.
2) Add −3 times the 1st row to the 2nd row.
3) Add 2 times the 1st row to the 3rd row.
4) Multiply the 2nd row by −1/2 :
5) Add −3 times the 2nd row to the 3rd row.
6) Multiply the 3rd row by −2/5
7) Add −3/2 times the 3rd row to the 2nd row.
8) Add −1 times the 3rd row to the 1st row.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1) Interchange the 1st row with the 2nd row.
2) Add −3 times the 1st row to the 2nd row.
3) Add 2 times the 1st row to the 3rd row.
4) Multiply the 2nd row by −1/2 :
5) Add −3 times the 2nd row to the 3rd row.
6) Multiply the 3rd row by −2/5
7) Add −3/2 times the 3rd row to the 2nd row.
8) Add −1 times the 3rd row to the 1st row.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1) Interchange the 1st row with the 2nd row.
2) Add −3 times the 1st row to the 2nd row.
3) Add 2 times the 1st row to the 3rd row.
4) Multiply the 2nd row by −1/2 :
5) Add −3 times the 2nd row to the 3rd row.
6) Multiply the 3rd row by −2/5
7) Add −3/2 times the 3rd row to the 2nd row.
8) Add −1 times the 3rd row to the 1st row.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1) Interchange the 1st row with the 2nd row.
2) Add −3 times the 1st row to the 2nd row.
3) Add 2 times the 1st row to the 3rd row.
4) Multiply the 2nd row by −1/2 :
5) Add −3 times the 2nd row to the 3rd row.
6) Multiply the 3rd row by −2/5
7) Add −3/2 times the 3rd row to the 2nd row.
8) Add −1 times the 3rd row to the 1st row.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1) Interchange the 1st row with the 2nd row.
2) Add −3 times the 1st row to the 2nd row.
3) Add 2 times the 1st row to the 3rd row.
4) Multiply the 2nd row by −1/2 :
5) Add −3 times the 2nd row to the 3rd row.
6) Multiply the 3rd row by −2/5
7) Add −3/2 times the 3rd row to the 2nd row.
8) Add −1 times the 3rd row to the 1st row.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1) Interchange the 1st row with the 2nd row.
2) Add −3 times the 1st row to the 2nd row.
3) Add 2 times the 1st row to the 3rd row.
4) Multiply the 2nd row by −1/2 :
5) Add −3 times the 2nd row to the 3rd row.
6) Multiply the 3rd row by −2/5
7) Add −3/2 times the 3rd row to the 2nd row.
8) Add −1 times the 3rd row to the 1st row.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way
to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute
the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1
is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices
A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I
into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one
3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix
(a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I )
(called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called
TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix),
and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations
to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix,
until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A
is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and
the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be
automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed
into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
A convenient way to compute the inverse matrix A−1 is to writethe matrices A and I into one 3× 6 matrix (a|I ) (called TheAugmented Matrix), and apply elementary row operations to thisnew matrix, until A is transformed into I and the identity matrix Iwill be automatically transformed into A−1
A =
3 −2 01 0 1−2 3 0
I =
1 0 00 1 00 0 1
(A|I ) =
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Interchange the 1st row with the 2nd row: 1 0 1 0 1 0
3 −2 0 1 0 0−2 3 0 0 0 1
Add −3 times the 1st row to the 2nd row: 1 0 1 0 1 0
0 −2 −3 1 −3 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Interchange the 1st row with the 2nd row: 1 0 1 0 1 03 −2 0 1 0 0−2 3 0 0 0 1
Add −3 times the 1st row to the 2nd row: 1 0 1 0 1 0
0 −2 −3 1 −3 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Interchange the 1st row with the 2nd row:
1 0 1 0 1 03 −2 0 1 0 0−2 3 0 0 0 1
Add −3 times the 1st row to the 2nd row: 1 0 1 0 1 0
0 −2 −3 1 −3 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Interchange the 1st row with the 2nd row: 1 0 1 0 1 0
3 −2 0 1 0 0−2 3 0 0 0 1
Add −3 times the 1st row to the 2nd row: 1 0 1 0 1 00 −2 −3 1 −3 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Interchange the 1st row with the 2nd row: 1 0 1 0 1 0
3 −2 0 1 0 0−2 3 0 0 0 1
Add −3 times the 1st row to the 2nd row:
1 0 1 0 1 00 −2 −3 1 −3 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
3 −2 0 1 0 01 0 1 0 1 0−2 3 0 0 0 1
Interchange the 1st row with the 2nd row: 1 0 1 0 1 0
3 −2 0 1 0 0−2 3 0 0 0 1
Add −3 times the 1st row to the 2nd row: 1 0 1 0 1 0
0 −2 −3 1 −3 0−2 3 0 0 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 −2 −3 1 −3 0−2 3 0 0 0 1
Add 2 times the 1st row to the 3rd row. 1 0 1 0 1 0
0 −2 −3 1 −3 00 3 2 0 2 1
Multiply the 2nd row by −1/2 : 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 3 2 0 2 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 −2 −3 1 −3 0−2 3 0 0 0 1
Add 2 times the 1st row to the 3rd row. 1 0 1 0 1 00 −2 −3 1 −3 00 3 2 0 2 1
Multiply the 2nd row by −1/2 : 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 3 2 0 2 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 −2 −3 1 −3 0−2 3 0 0 0 1
Add 2 times the 1st row to the 3rd row.
1 0 1 0 1 00 −2 −3 1 −3 00 3 2 0 2 1
Multiply the 2nd row by −1/2 : 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 3 2 0 2 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 −2 −3 1 −3 0−2 3 0 0 0 1
Add 2 times the 1st row to the 3rd row. 1 0 1 0 1 0
0 −2 −3 1 −3 00 3 2 0 2 1
Multiply the 2nd row by −1/2 : 1 0 1 0 1 00 1 3/2 −1/2 3/2 00 3 2 0 2 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 −2 −3 1 −3 0−2 3 0 0 0 1
Add 2 times the 1st row to the 3rd row. 1 0 1 0 1 0
0 −2 −3 1 −3 00 3 2 0 2 1
Multiply the 2nd row by −1/2 :
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 3 2 0 2 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 −2 −3 1 −3 0−2 3 0 0 0 1
Add 2 times the 1st row to the 3rd row. 1 0 1 0 1 0
0 −2 −3 1 −3 00 3 2 0 2 1
Multiply the 2nd row by −1/2 : 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 3 2 0 2 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 3 2 0 2 1
Add −3 times the 2nd row to the 3rd row. 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 0 5/2 −3/5 1 0
Multiply the 3rd row by −2/5 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 3 2 0 2 1
Add −3 times the 2nd row to the 3rd row. 1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 5/2 −3/5 1 0
Multiply the 3rd row by −2/5 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 3 2 0 2 1
Add −3 times the 2nd row to the 3rd row.
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 5/2 −3/5 1 0
Multiply the 3rd row by −2/5 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 3 2 0 2 1
Add −3 times the 2nd row to the 3rd row. 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 0 5/2 −3/5 1 0
Multiply the 3rd row by −2/5 1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 3 2 0 2 1
Add −3 times the 2nd row to the 3rd row. 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 0 5/2 −3/5 1 0
Multiply the 3rd row by −2/5
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 3 2 0 2 1
Add −3 times the 2nd row to the 3rd row. 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 0 5/2 −3/5 1 0
Multiply the 3rd row by −2/5 1 0 1 0 1 0
0 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Add −3/2 times the 3rd row to the 2nd row. 1 0 1 0 1 0
0 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
Add −1 times the 3rd row to the 1st row. 1 0 0 3/5 0 2/5
0 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
= (I |A−1)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Add −3/2 times the 3rd row to the 2nd row. 1 0 1 0 1 00 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
Add −1 times the 3rd row to the 1st row. 1 0 0 3/5 0 2/5
0 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
= (I |A−1)
Dr. Marco A Roque Sol Linear Algebra. Session 3
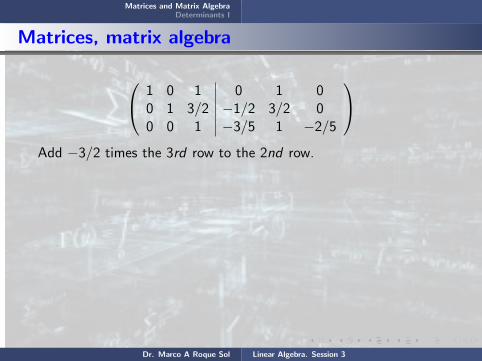
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Add −3/2 times the 3rd row to the 2nd row.
1 0 1 0 1 00 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
Add −1 times the 3rd row to the 1st row. 1 0 0 3/5 0 2/5
0 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
= (I |A−1)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Add −3/2 times the 3rd row to the 2nd row. 1 0 1 0 1 0
0 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
Add −1 times the 3rd row to the 1st row. 1 0 0 3/5 0 2/50 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
= (I |A−1)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Add −3/2 times the 3rd row to the 2nd row. 1 0 1 0 1 0
0 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
Add −1 times the 3rd row to the 1st row.
1 0 0 3/5 0 2/50 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
= (I |A−1)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
1 0 1 0 1 00 1 3/2 −1/2 3/2 00 0 1 −3/5 1 −2/5
Add −3/2 times the 3rd row to the 2nd row. 1 0 1 0 1 0
0 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
Add −1 times the 3rd row to the 1st row. 1 0 0 3/5 0 2/5
0 1 0 2/5 0 3/50 0 1 −3/5 1 −2/5
= (I |A−1)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus
3 −2 11 0 1−2 3 0
−1 3/5 0 2/52/5 0 3/5−3/5 1 −2/5
=1
5
3 0 22 0 3−3 5 −2
That is 3 −2 1
1 0 1−2 3 0
1
5
3 0 22 0 3−3 5 −2
=
1 0 00 1 00 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus
3 −2 11 0 1−2 3 0
−1 3/5 0 2/52/5 0 3/5−3/5 1 −2/5
=1
5
3 0 22 0 3−3 5 −2
That is 3 −2 1
1 0 1−2 3 0
1
5
3 0 22 0 3−3 5 −2
=
1 0 00 1 00 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus
3 −2 11 0 1−2 3 0
−1
3/5 0 2/52/5 0 3/5−3/5 1 −2/5
=1
5
3 0 22 0 3−3 5 −2
That is 3 −2 1
1 0 1−2 3 0
1
5
3 0 22 0 3−3 5 −2
=
1 0 00 1 00 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
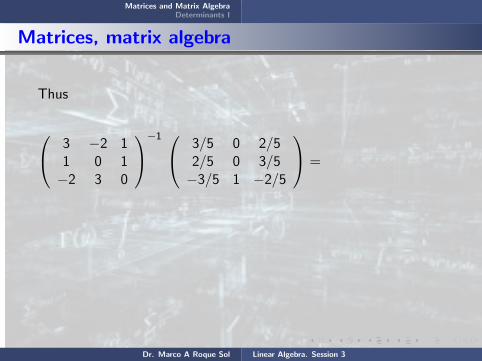
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus
3 −2 11 0 1−2 3 0
−1 3/5 0 2/52/5 0 3/5−3/5 1 −2/5
=
1
5
3 0 22 0 3−3 5 −2
That is 3 −2 1
1 0 1−2 3 0
1
5
3 0 22 0 3−3 5 −2
=
1 0 00 1 00 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus
3 −2 11 0 1−2 3 0
−1 3/5 0 2/52/5 0 3/5−3/5 1 −2/5
=1
5
3 0 22 0 3−3 5 −2
That is 3 −2 11 0 1−2 3 0
1
5
3 0 22 0 3−3 5 −2
=
1 0 00 1 00 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus
3 −2 11 0 1−2 3 0
−1 3/5 0 2/52/5 0 3/5−3/5 1 −2/5
=1
5
3 0 22 0 3−3 5 −2
That is
3 −2 11 0 1−2 3 0
1
5
3 0 22 0 3−3 5 −2
=
1 0 00 1 00 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus
3 −2 11 0 1−2 3 0
−1 3/5 0 2/52/5 0 3/5−3/5 1 −2/5
=1
5
3 0 22 0 3−3 5 −2
That is 3 −2 1
1 0 1−2 3 0
1
5
3 0 22 0 3−3 5 −2
=
1 0 00 1 00 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus
3 −2 11 0 1−2 3 0
−1 3/5 0 2/52/5 0 3/5−3/5 1 −2/5
=1
5
3 0 22 0 3−3 5 −2
That is 3 −2 1
1 0 1−2 3 0
1
5
3 0 22 0 3−3 5 −2
=
1 0 00 1 00 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus
3 −2 11 0 1−2 3 0
−1 3/5 0 2/52/5 0 3/5−3/5 1 −2/5
=1
5
3 0 22 0 3−3 5 −2
That is 3 −2 1
1 0 1−2 3 0
1
5
3 0 22 0 3−3 5 −2
=
1 0 00 1 00 0 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw
( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5)
that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way
to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to compute
the inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix
A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1
is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices
A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I
into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix
(A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I )
and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary
row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations
to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any
elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation
can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated
as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by
a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain
( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
We already saw ( Theorem 3.5) that a convenient way to computethe inverse matrix A−1 is to merge the matrices A and I into onematrix (A|I ) and apply elementary row operations to this newmatrix.
Question: Why does it work?
Proposition
Any elementary row operation can be simulated as leftmultiplication by a certain ( elementary ) matrix
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix
EA can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA
can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained
from A, multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3
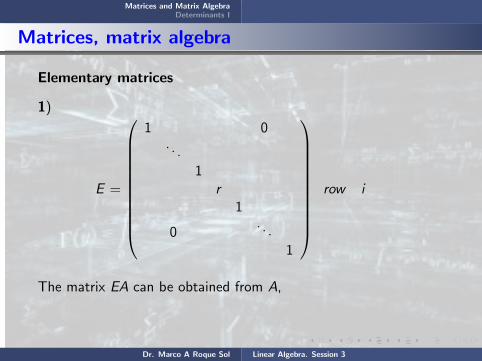
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A,
multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying
the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row
byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr .
(The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr . (The matrix AE
can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained
from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained from A,
multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ith
column by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3
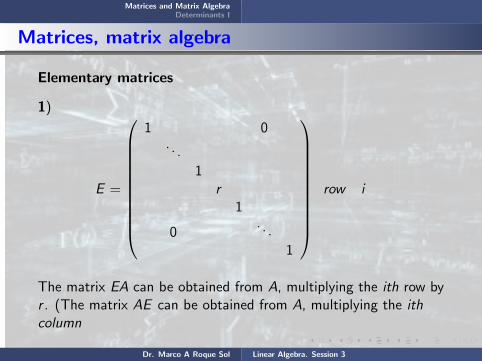
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn
by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3
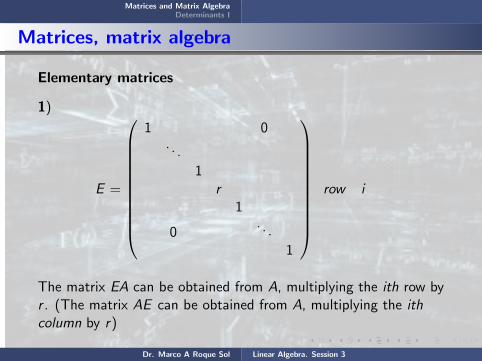
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
1)
E =
1 0. . .
1r
1
0. . .
1
row i
The matrix EA can be obtained from A, multiplying the ith row byr . (The matrix AE can be obtained from A, multiplying the ithcolumn by r)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix
EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA
can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained
from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
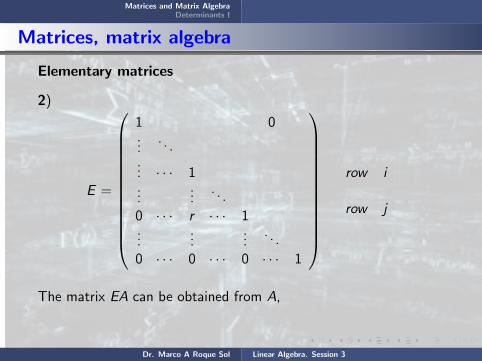
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A,
adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
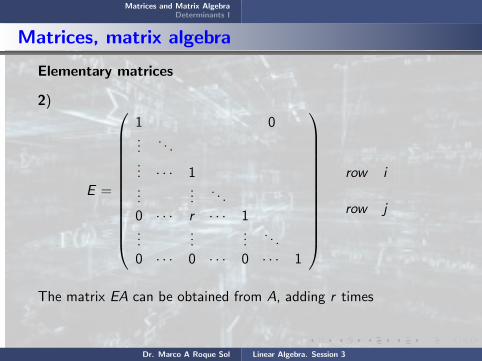
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times
the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith row
to the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row.
(The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
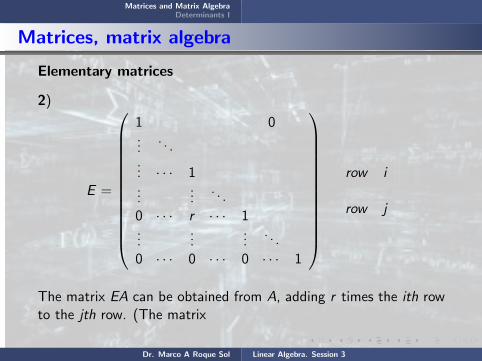
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix
AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
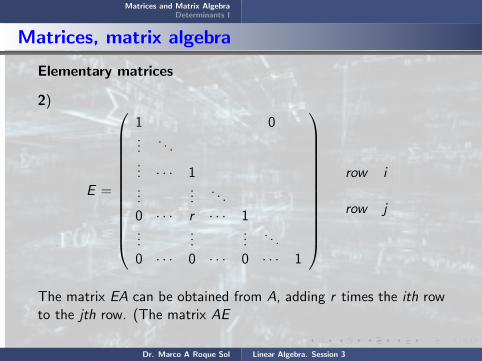
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE
can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained
from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A,
adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes
the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
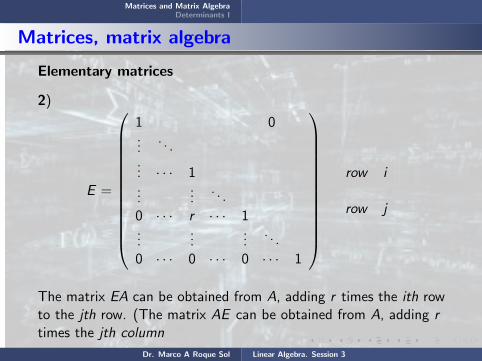
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column
to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the
ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
2)
E =
1 0...
. . .... · · · 1...
.... . .
0 · · · r · · · 1...
......
. . .
0 · · · 0 · · · 0 · · · 1
row i
row j
The matrix EA can be obtained from A, adding r times the ith rowto the jth row. (The matrix AE can be obtained from A, adding rtimes the jth column to the ith column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
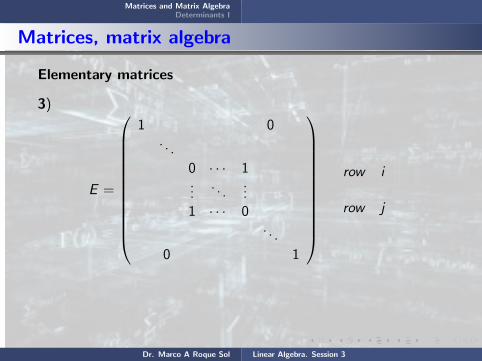
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix
EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
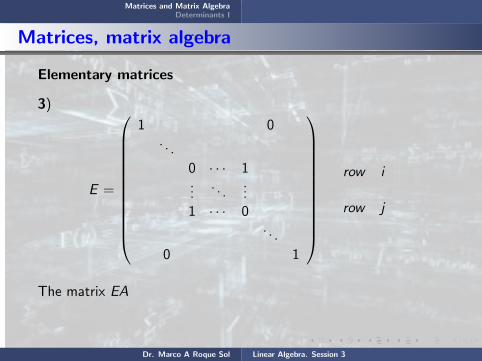
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA
can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
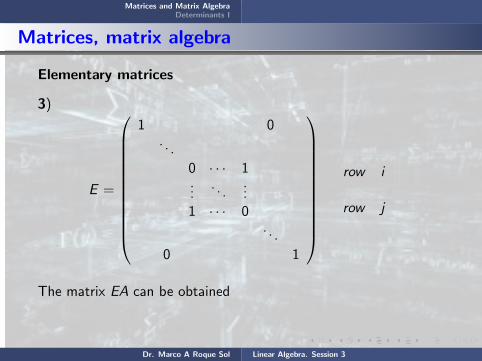
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained
from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
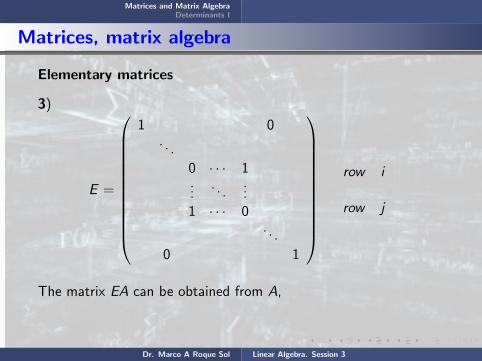
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A,
interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging
the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith row
with the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row.
(The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
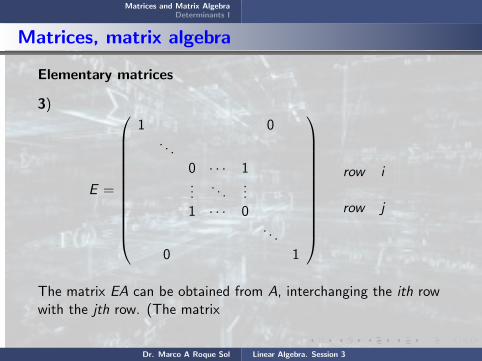
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix
AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE
can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained
from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3
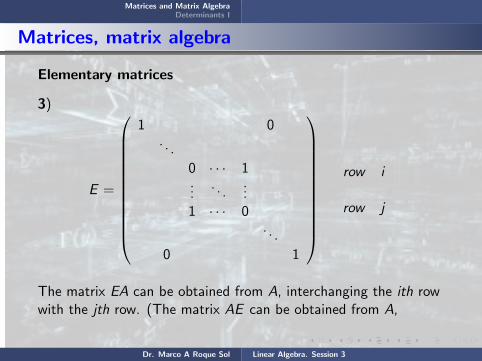
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,
interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column
with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Elementary matrices
3)
E =
1 0. . .
0 · · · 1...
. . ....
1 · · · 0. . .
0 1
row i
row j
The matrix EA can be obtained from A, interchanging the ith rowwith the jth row. (The matrix AE can be obtained from A,interchanging the ith column with the jth column)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus,
assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that
a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A
can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted
to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix
by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of
elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations.
ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A
where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,
E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2,
· · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,
Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,
Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek
are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices s
imulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying
the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence
of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations
to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,
we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain
the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I =
EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus,
BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I .
Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover,
B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible
since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matrices
are invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible.
It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows
that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I ,
then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then
A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1,
soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Thus, assume that a square matrix A can be converted to theidentity matrix by a sequence of elementary row operations. ThenEkEk−1 · · ·E2E1A where E1,E2, · · · ,Ek−1,Ek are elementarymatrices simulating those operations.
Applying the same sequence of operations to the identity matrix,we obtain the matrix
B = EkEk−1 · · ·E2E1I = EkEk−1 · · ·E2E1
Thus, BA = I . Moreover, B is invertible since elementary matricesare invertible. It follows that B−1(BA) = B−1I , then A = B−1, soB = A−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given
a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A
the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A,
denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT ,
is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix
whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows
are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A
(and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns
are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A )
That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is,
if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij),
then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij)
where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji .
Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,
for instance (1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance
(1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
145
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=
(1 4 5
) 1 2
2 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Transpose of a matrix
Given a matrix A the transpose of A, denoted by AT , is thematrix whose rows are columns of A (and whose columns are rowsof A ) That is, if A = (aij), then AT = (bij) where bij = aji . Thus,for instance (
1 2 34 5 6
)T
=
1 42 53 6
1
45
T
=(
1 4 5)
1 22 05
T
=
(1 22 0
)Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Properties of transposes
(AT )T = A
(A + B)T = AT + BT
(rA)T = rAT
(AB)T = BTAT
(A1A2 · · ·Ak)T = ATk A
Tk−1 · · ·AT
2 AT1
(A−1)T = (AT )−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Properties of transposes
(AT )T = A
(A + B)T = AT + BT
(rA)T = rAT
(AB)T = BTAT
(A1A2 · · ·Ak)T = ATk A
Tk−1 · · ·AT
2 AT1
(A−1)T = (AT )−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Properties of transposes
(AT )T = A
(A + B)T = AT + BT
(rA)T = rAT
(AB)T = BTAT
(A1A2 · · ·Ak)T = ATk A
Tk−1 · · ·AT
2 AT1
(A−1)T = (AT )−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Properties of transposes
(AT )T = A
(A + B)T = AT + BT
(rA)T = rAT
(AB)T = BTAT
(A1A2 · · ·Ak)T = ATk A
Tk−1 · · ·AT
2 AT1
(A−1)T = (AT )−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Properties of transposes
(AT )T = A
(A + B)T = AT + BT
(rA)T = rAT
(AB)T = BTAT
(A1A2 · · ·Ak)T = ATk A
Tk−1 · · ·AT
2 AT1
(A−1)T = (AT )−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Properties of transposes
(AT )T = A
(A + B)T = AT + BT
(rA)T = rAT
(AB)T = BTAT
(A1A2 · · ·Ak)T = ATk A
Tk−1 · · ·AT
2 AT1
(A−1)T = (AT )−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Properties of transposes
(AT )T = A
(A + B)T = AT + BT
(rA)T = rAT
(AB)T = BTAT
(A1A2 · · ·Ak)T = ATk A
Tk−1 · · ·AT
2 AT1
(A−1)T = (AT )−1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Properties of transposes
(AT )T = A
(A + B)T = AT + BT
(rA)T = rAT
(AB)T = BTAT
(A1A2 · · ·Ak)T = ATk A
Tk−1 · · ·AT
2 AT1
(A−1)T = (AT )−1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix
A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A
is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be
symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric
if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example,
any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix
is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any
square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A
the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and
C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Matrices, matrix algebra
Definition
A square matrix A is said to be symmetric if A = AT
For example, any diagonal matrix is symmetric.
Proposition
For any square matrix A the matrices B = AAT and C = A + AT ,are symmetric.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition
of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant
is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated
asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no
simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic):
We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate
properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that
thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant
should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive):
The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of
an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix
isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined
in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of
determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of
certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original):
An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit
(but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)
formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula
is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
The general definition of the determinant is quite complicated asthere is no simple explicit formula
Approach 1 (Axiomatic): We formulate properties that thedeterminant should have.
Approach 2 (Inductive): The determinant of an n × n matrix isdefined in terms of determinants of certain (n − 1)× (n − 1)matrices.
Approach 3 (Original): An explicit (but very complicated)formula is provided.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R):
The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of
n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices
with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists
a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R
(called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant)
with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following
properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of
a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix
is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by
a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r ,
the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinant
is also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add
a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of
a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix
multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by
a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar
to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow,
the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains
the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange
two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows
of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix,
the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinant
changes its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4:
det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 1 (Axiomatic)
Mn×n(R): The set of n × n matrices with real entries.
AXIOMS
There exists a unique function det :Mn×n(R) −→ R (called thedeterminant) with the following properties
A1 If a row of a matrix is multiplied by a scalar r , the determinantis also multiplied by r
A2 If we add a row of a matrix multiplied by a scalar to anotherrow, the determinant remains the same
A3 If we interchange two rows of a matrix, the determinantchanges its sign;
A4: det(I ) = 1
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A
is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and
B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A
applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary
row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations.
Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0
if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only if
det(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0
whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever
the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B
has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0
if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if
the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix
is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.6
Suppose A is a square matrix and B is obtained from A applyingelementary row operations. Then det(A) = 0 if and only ifdet(B) = 0.
Theorem 3.7
det(B) = 0 whenever the matrix B has a zero row
Theorem 3.8
det(A) = 0 if and only if the matrix is not invertible.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof:
Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be
the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row
echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A.
IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible
then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ;
otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B
has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument
proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties
(A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4)
areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough
to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate
any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A
has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two
proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then
det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Idea of the proof: Let B be the reduced row echelon form of A. IfA is invertible then B = I ; otherwise B has a zero row .
Remark. The same argument proves that properties (A1)(A4) areenough to evaluate any determinant.
Theorem 3.9
If a matrix A has two proportional rows then det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Row echelon form of a square matrix
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
det(A) 6= 0 det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Row echelon form of a square matrix
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
det(A) 6= 0 det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Row echelon form of a square matrix
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
det(A) 6= 0 det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Row echelon form of a square matrix
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
det(A) 6= 0 det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3
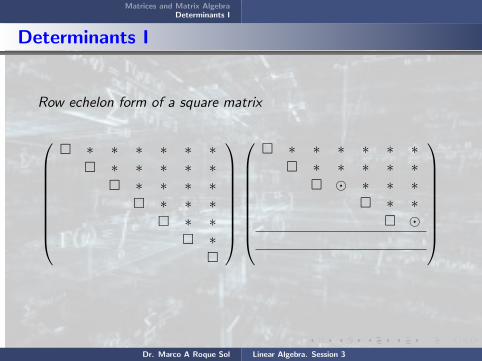
Matrices and Matrix AlgebraDeterminants I
Determinants I
Row echelon form of a square matrix
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
det(A) 6= 0 det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Row echelon form of a square matrix
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
det(A) 6= 0
det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3
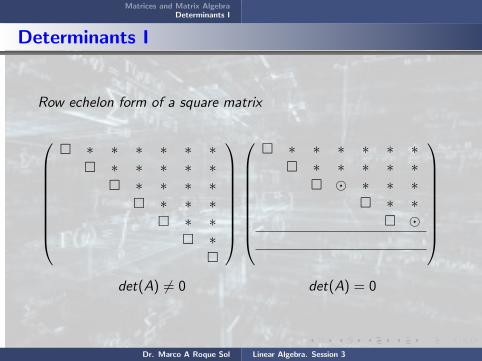
Matrices and Matrix AlgebraDeterminants I
Determinants I
Row echelon form of a square matrix
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� ∗ ∗ ∗ ∗� ∗ ∗ ∗
� ∗ ∗� ∗
�
� ∗ ∗ ∗ ∗ ∗ ∗� ∗ ∗ ∗ ∗ ∗
� � ∗ ∗ ∗� ∗ ∗
� �
det(A) 6= 0 det(A) = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier
we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed
the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A
into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrix
using elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary
row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included
two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications,
by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and
by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, and
one row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence
det(A) = −5det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5
det(I ) = − 5
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) =
− 5
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
As an example, we have the matrix
A =
3 −2 01 0 1−2 3 0
Earlier we have transformed the matrix A into the identity matrixusing elementary row operations.
These included two row multiplications, by −0.5 and by −0.4, andone row exchange.
It follows that
det(I ) = −(−0.5)(−0.4)det(A) = (−0.2)det(A)
Hence det(A) = −5det(I ) = − 5Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system
{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where
we can notice that the amount ad − bc playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice
that the amount ad − bc playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount
ad − bc playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc
playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole
in the solution is a combination of the elements of the matrix(a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution
is a combination of the elements of the matrix(a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution is a combination
of the elements of the matrix(a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution is a combination of the elements
of the matrix(a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution is a combination of the elements of the matrix
(a bc d
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Approach 2 (Inductive)
Let’s start by considering a 2× 2 system{ax + by = ecx + dy = f
whose solution is given by
x =ed − bf
ad − bcy =
af − ce
ad − bc
where we can notice that the amount ad − bc playing an importantrole in the solution is a combination of the elements of the matrix(
a bc d
)Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way,
if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider
a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3
systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 system
a11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find,
the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions
for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables
have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator
thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which
also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays
an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role
in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set.
Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus,
thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be
a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point
of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept
of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
In a similar way, if we consider a 3× 3 systema11x + a12y + a13 = b1a21x + a22y + a23 = b2a31x + a32y + a33 = b3
we find, the solutions for the variables have in the denominator thequantity
a11(a22a33 − a23a32)− a12(a21a33 − a23a31)+
a13(a21a32 − a22a31)
which also plays an important role in the solution set. Thus, thiscould be a practical starting point of the concept of determinant.
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing
the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant,
let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start
with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple
of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition
Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A
a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix
of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A
is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrix
obtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying
k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and
k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows
of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and
deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and
rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒
∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒
(2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Before introducing the concept of determinant, let’s start with acouple of definitions
Submatrices
Definition Given a matrix A a k × k submatrix of A is a matrixobtained by specifying k columns and k rows of A and deleting theother columns and rows.
1 2 3 410 20 30 403 5 7 9
⇒ ∗ 2 ∗ 4∗ ∗ ∗ ∗∗ 5 ∗ 9
⇒ (2 45 9
)
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given
an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n
matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij),
let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij ,
denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote
the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant
ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe
(n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix
obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by
deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand
the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column
of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number
obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained
in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way
iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor
of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A
there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A
denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and
definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1
A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11
|A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3
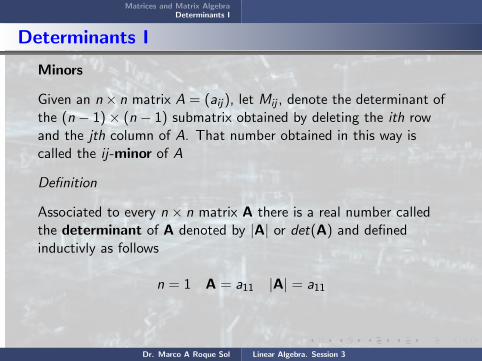
Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2
A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)
|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ =
a11a22 − a12a21
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Minors
Given an n× n matrix A = (aij), let Mij , denote the determinant ofthe (n − 1)× (n − 1) submatrix obtained by deleting the ith rowand the jth column of A. That number obtained in this way iscalled the ij-minor of A
Definition
Associated to every n × n matrix A there is a real number calledthe determinant of A denoted by |A| or det(A) and definedinductivly as follows
n = 1 A = a11 |A| = a11
n = 2 A =
(a11 a12a21 a22
)|A| =
∣∣∣∣a11 a12a21 a22
∣∣∣∣ = a11a22 − a12a21Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3 A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣− a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+ a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3
A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣− a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+ a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3 A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣− a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+ a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3 A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣− a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+ a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3 A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣− a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+ a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3
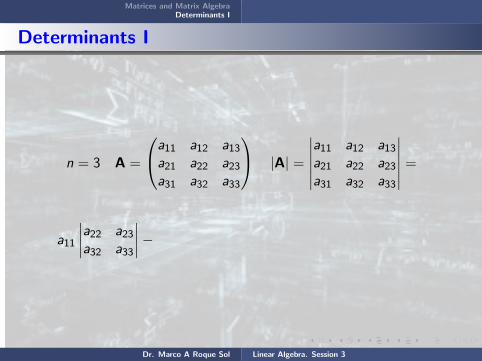
Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3 A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣−
a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+ a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3 A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣− a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+ a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3 A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣− a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+
a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3
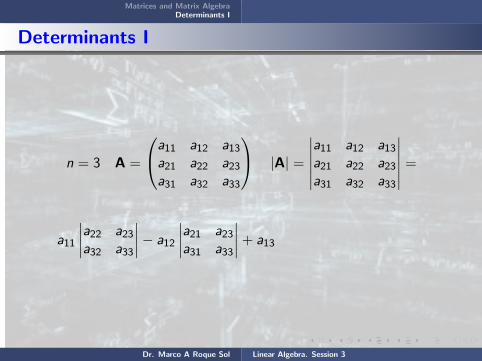
Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3 A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣− a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+ a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
n = 3 A =
a11 a12 a13a21 a22 a23a31 a32 a33
|A| =
∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ =
a11
∣∣∣∣a22 a23a32 a33
∣∣∣∣− a12
∣∣∣∣a21 a23a31 a33
∣∣∣∣+ a13
∣∣∣∣a11 a12a31 a32
∣∣∣∣ = a11a22a33+
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 +
a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3
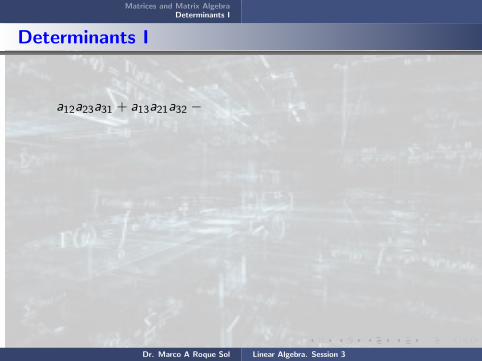
Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 −
a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 −
a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 −
a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+
a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−
a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 −
a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣
Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now,
for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4,
if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j
be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors
to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow,
then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3
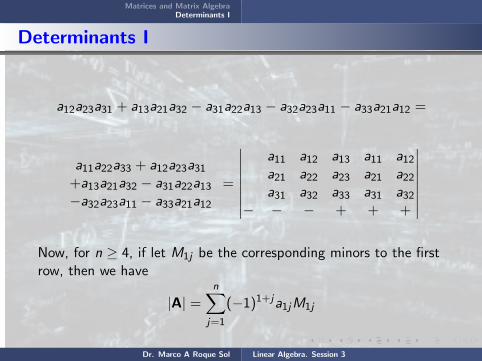
Matrices and Matrix AlgebraDeterminants I
Determinants I
a12a23a31 + a13a21a32 − a31a22a13 − a32a23a11 − a33a21a12 =
a11a22a33 + a12a23a31+a13a21a32 − a31a22a13−a32a23a11 − a33a21a12
=
∣∣∣∣∣∣∣∣a11 a12 a13 a11 a12a21 a22 a23 a21 a22a31 a32 a33 a31 a32
− − − + + +
∣∣∣∣∣∣∣∣Now, for n ≥ 4, if let M1j be the corresponding minors to the firstrow, then we have
|A| =n∑
j=1
(−1)1+ja1jM1j
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.10
For any 1 ≤ k ,m ≤ n we have that
det(A) =n∑
j=1
(−1)k+jakjMij
(expansion by the k − th row )
det(A) =n∑
i=1
(−1)i+maimMij
(expansion by the m − th row )
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.10
For any 1 ≤ k ,m ≤ n we have that
det(A) =n∑
j=1
(−1)k+jakjMij
(expansion by the k − th row )
det(A) =n∑
i=1
(−1)i+maimMij
(expansion by the m − th row )
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.10
For any
1 ≤ k ,m ≤ n we have that
det(A) =n∑
j=1
(−1)k+jakjMij
(expansion by the k − th row )
det(A) =n∑
i=1
(−1)i+maimMij
(expansion by the m − th row )
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.10
For any 1 ≤ k ,m ≤ n
we have that
det(A) =n∑
j=1
(−1)k+jakjMij
(expansion by the k − th row )
det(A) =n∑
i=1
(−1)i+maimMij
(expansion by the m − th row )
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.10
For any 1 ≤ k ,m ≤ n we have that
det(A) =n∑
j=1
(−1)k+jakjMij
(expansion by the k − th row )
det(A) =n∑
i=1
(−1)i+maimMij
(expansion by the m − th row )
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.10
For any 1 ≤ k ,m ≤ n we have that
det(A) =n∑
j=1
(−1)k+jakjMij
(expansion by the k − th row )
det(A) =n∑
i=1
(−1)i+maimMij
(expansion by the m − th row )
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.10
For any 1 ≤ k ,m ≤ n we have that
det(A) =n∑
j=1
(−1)k+jakjMij
(expansion by the k − th row )
det(A) =n∑
i=1
(−1)i+maimMij
(expansion by the m − th row )
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.10
For any 1 ≤ k ,m ≤ n we have that
det(A) =n∑
j=1
(−1)k+jakjMij
(expansion by the k − th row )
det(A) =n∑
i=1
(−1)i+maimMij
(expansion by the m − th row )
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.10
For any 1 ≤ k ,m ≤ n we have that
det(A) =n∑
j=1
(−1)k+jakjMij
(expansion by the k − th row )
det(A) =n∑
i=1
(−1)i+maimMij
(expansion by the m − th row )
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.11
Given an n × n matrix A, if B is an n × n matrix obtained from Aby
1) Additive law for rows
Suppose that matrices X ,Y ,Z are identical except for the ith row.The the ith row of Z is the sum of the ith rows of X and Y then
det(Z ) = det(X ) + det(Y )
a1 + a′1 a2 + a′2 a3 + a′3b1 b2 b3c1 c2 c3
=
a1 a2 a3b1 b2 b3c1 c2 c3
+
a′1 a′2 a′3b1 b2 b3c1 c2 c3
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.11
Given an n × n matrix A, if B is an n × n matrix obtained from Aby
1) Additive law for rows
Suppose that matrices X ,Y ,Z are identical except for the ith row.The the ith row of Z is the sum of the ith rows of X and Y then
det(Z ) = det(X ) + det(Y )
a1 + a′1 a2 + a′2 a3 + a′3b1 b2 b3c1 c2 c3
=
a1 a2 a3b1 b2 b3c1 c2 c3
+
a′1 a′2 a′3b1 b2 b3c1 c2 c3
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.11
Given an n × n matrix A,
if B is an n × n matrix obtained from Aby
1) Additive law for rows
Suppose that matrices X ,Y ,Z are identical except for the ith row.The the ith row of Z is the sum of the ith rows of X and Y then
det(Z ) = det(X ) + det(Y )
a1 + a′1 a2 + a′2 a3 + a′3b1 b2 b3c1 c2 c3
=
a1 a2 a3b1 b2 b3c1 c2 c3
+
a′1 a′2 a′3b1 b2 b3c1 c2 c3
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.11
Given an n × n matrix A, if B is an n × n matrix obtained from Aby
1) Additive law for rows
Suppose that matrices X ,Y ,Z are identical except for the ith row.The the ith row of Z is the sum of the ith rows of X and Y then
det(Z ) = det(X ) + det(Y )
a1 + a′1 a2 + a′2 a3 + a′3b1 b2 b3c1 c2 c3
=
a1 a2 a3b1 b2 b3c1 c2 c3
+
a′1 a′2 a′3b1 b2 b3c1 c2 c3
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.11
Given an n × n matrix A, if B is an n × n matrix obtained from Aby
1) Additive law for rows
Suppose that matrices X ,Y ,Z are identical except for the ith row.The the ith row of Z is the sum of the ith rows of X and Y then
det(Z ) = det(X ) + det(Y )
a1 + a′1 a2 + a′2 a3 + a′3b1 b2 b3c1 c2 c3
=
a1 a2 a3b1 b2 b3c1 c2 c3
+
a′1 a′2 a′3b1 b2 b3c1 c2 c3
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.11
Given an n × n matrix A, if B is an n × n matrix obtained from Aby
1) Additive law for rows
Suppose that matrices X ,Y ,Z are identical except for the ith row.The the ith row of Z is the sum of the ith rows of X and Y then
det(Z ) = det(X ) + det(Y )
a1 + a′1 a2 + a′2 a3 + a′3b1 b2 b3c1 c2 c3
=
a1 a2 a3b1 b2 b3c1 c2 c3
+
a′1 a′2 a′3b1 b2 b3c1 c2 c3
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.11
Given an n × n matrix A, if B is an n × n matrix obtained from Aby
1) Additive law for rows
Suppose that matrices X ,Y ,Z are identical except for the ith row.The the ith row of Z is the sum of the ith rows of X and Y then
det(Z ) = det(X ) + det(Y )
a1 + a′1 a2 + a′2 a3 + a′3b1 b2 b3c1 c2 c3
=
a1 a2 a3b1 b2 b3c1 c2 c3
+
a′1 a′2 a′3b1 b2 b3c1 c2 c3
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.11
Given an n × n matrix A, if B is an n × n matrix obtained from Aby
1) Additive law for rows
Suppose that matrices X ,Y ,Z are identical except for the ith row.The the ith row of Z is the sum of the ith rows of X and Y then
det(Z ) = det(X ) + det(Y )
a1 + a′1 a2 + a′2 a3 + a′3b1 b2 b3c1 c2 c3
=
a1 a2 a3b1 b2 b3c1 c2 c3
+
a′1 a′2 a′3b1 b2 b3c1 c2 c3
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.11
Given an n × n matrix A, if B is an n × n matrix obtained from Aby
1) Additive law for rows
Suppose that matrices X ,Y ,Z are identical except for the ith row.The the ith row of Z is the sum of the ith rows of X and Y then
det(Z ) = det(X ) + det(Y )
a1 + a′1 a2 + a′2 a3 + a′3b1 b2 b3c1 c2 c3
=
a1 a2 a3b1 b2 b3c1 c2 c3
+
a′1 a′2 a′3b1 b2 b3c1 c2 c3
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then
|B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|
∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣
2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3
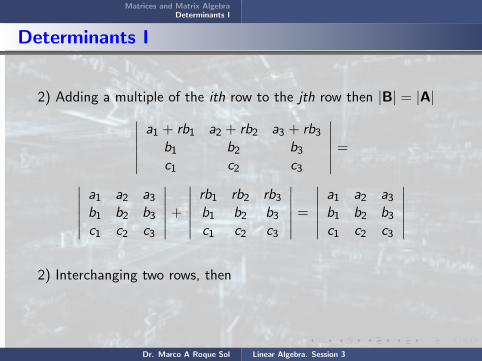
Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then
|B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then
|B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|
4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then
|B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3
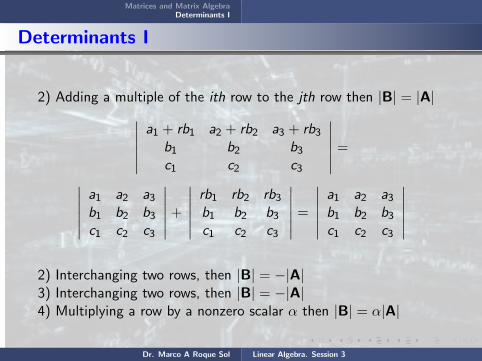
Matrices and Matrix AlgebraDeterminants I
Determinants I
2) Adding a multiple of the ith row to the jth row then |B| = |A|∣∣∣∣∣∣a1 + rb1 a2 + rb2 a3 + rb3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣+
∣∣∣∣∣∣rb1 rb2 rb3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3b1 b2 b3c1 c2 c3
∣∣∣∣∣∣2) Interchanging two rows, then |B| = −|A|3) Interchanging two rows, then |B| = −|A|4) Multiplying a row by a nonzero scalar α then |B| = α|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence,
for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property
of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants
involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows
of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix
there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is
an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property
involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columns
of a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then
|A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then
|A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
Theorem 3.12
1) |AT | = |A|
( As a consequence, for every property of determinants involvingrows of a matrix there is an analogous property involving columnsof a matrix. )
2) |AB| = |A||B|
3) If A has a row (column) of zeros, then |A| = 0
4) If A has a two identical rows (columns), then |A| = 0
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
5) If two rows (columns) of A are proportional, then |A| = 0
6) If A is an upper (lower) triangular matrix, then|A| = a11a22a33 · · · ann
7) If A is an invertible matrix, then |A−1| = |A|−1
8) If A is an n × n matrix and r ∈ R, then |rA| = rn|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
5) If two rows (columns) of A are proportional, then
|A| = 0
6) If A is an upper (lower) triangular matrix, then|A| = a11a22a33 · · · ann
7) If A is an invertible matrix, then |A−1| = |A|−1
8) If A is an n × n matrix and r ∈ R, then |rA| = rn|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
5) If two rows (columns) of A are proportional, then |A| = 0
6) If A is an upper (lower) triangular matrix, then|A| = a11a22a33 · · · ann
7) If A is an invertible matrix, then |A−1| = |A|−1
8) If A is an n × n matrix and r ∈ R, then |rA| = rn|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
5) If two rows (columns) of A are proportional, then |A| = 0
6) If A is an upper (lower) triangular matrix, then
|A| = a11a22a33 · · · ann
7) If A is an invertible matrix, then |A−1| = |A|−1
8) If A is an n × n matrix and r ∈ R, then |rA| = rn|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
5) If two rows (columns) of A are proportional, then |A| = 0
6) If A is an upper (lower) triangular matrix, then|A| = a11a22a33 · · · ann
7) If A is an invertible matrix, then |A−1| = |A|−1
8) If A is an n × n matrix and r ∈ R, then |rA| = rn|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
5) If two rows (columns) of A are proportional, then |A| = 0
6) If A is an upper (lower) triangular matrix, then|A| = a11a22a33 · · · ann
7) If A is an invertible matrix, then
|A−1| = |A|−1
8) If A is an n × n matrix and r ∈ R, then |rA| = rn|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
5) If two rows (columns) of A are proportional, then |A| = 0
6) If A is an upper (lower) triangular matrix, then|A| = a11a22a33 · · · ann
7) If A is an invertible matrix, then |A−1| = |A|−1
8) If A is an n × n matrix and r ∈ R, then |rA| = rn|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3
Matrices and Matrix AlgebraDeterminants I
Determinants I
5) If two rows (columns) of A are proportional, then |A| = 0
6) If A is an upper (lower) triangular matrix, then|A| = a11a22a33 · · · ann
7) If A is an invertible matrix, then |A−1| = |A|−1
8) If A is an n × n matrix and r ∈ R, then
|rA| = rn|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3

Matrices and Matrix AlgebraDeterminants I
Determinants I
5) If two rows (columns) of A are proportional, then |A| = 0
6) If A is an upper (lower) triangular matrix, then|A| = a11a22a33 · · · ann
7) If A is an invertible matrix, then |A−1| = |A|−1
8) If A is an n × n matrix and r ∈ R, then |rA| = rn|A|
Dr. Marco A Roque Sol Linear Algebra. Session 3
Related Documents











