Linear Algebra Meets Lie Algebra The Kostant-Wallach Theory Noam Shomron Beresford Parlett University of California, Berkeley June, 2010 ILAS Meeting, Pisa, Italy

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Linear Algebra Meets Lie AlgebraThe Kostant-Wallach Theory
Noam ShomronBeresford Parlett
University of California, Berkeley
June, 2010
ILAS Meeting, Pisa, Italy
Gelfand-Zeitlin theory from the perspective of classical mechanics,I and IIStudies in Lie Theory, 2006.
Linear Algebra Meets Lie AlgebraThe Kostant-Wallach Theory
Noam ShomronBeresford Parlett
University of California, Berkeley
June, 2010
ILAS Meeting, Pisa, Italy
Gelfand-Zeitlin theory from the perspective of classical mechanics,I and IIStudies in Lie Theory, 2006.
An Equivalence Relation on Square Matrices
M(n) = all n × n complex matrices with Poisson structure.B ∈M(n),Bj := B(1 : j , 1 : j)
Definition (Ritz Values)
R(B) := (Eig(B1),Eig(B2), . . . ,Eig(Bn))
B ∈M(n),C ∈M(n),B ∼ C ⇔ R(B) = R(C ).? Gelfand Equivalence ?
Given any generic multiset Λ of(n+1
2
)complex numbers then
MΛ(n) := B ∈M(n) | R(B) = Λ,a fibre ofM(n) as a Lie Algebra.
EachMΛ(n) is a symplectic leaf ofMΩ(n).
An Equivalence Relation on Square Matrices
M(n) = all n × n complex matrices with Poisson structure.B ∈M(n),Bj := B(1 : j , 1 : j)
Definition (Ritz Values)
R(B) := (Eig(B1),Eig(B2), . . . ,Eig(Bn))
B ∈M(n),C ∈M(n),B ∼ C ⇔ R(B) = R(C ).? Gelfand Equivalence ?
Given any generic multiset Λ of(n+1
2
)complex numbers then
MΛ(n) := B ∈M(n) | R(B) = Λ,a fibre ofM(n) as a Lie Algebra.
EachMΛ(n) is a symplectic leaf ofMΩ(n).
Why study ∼ ?
Gil Strang
Kostant and Wallach found a “classical” analogue of theGelfand - Kirilov theorem. They constructed a Lie Group whichacts onM(n) and preserves Ritz values.
Lemma
Λ fixes the diagonal of each B ∈MΛ(n).
Proof. B(j , j) = trace(Bj)− trace(Bj−1).
Elementary Conjugations
(i) transposition: B → BT
(ii) diagonal similarity: B → DBD−1.
Lemma (K and W)
For any generic Λ,MΛ(n) contains exactly one unit upper Hessenberg matrix.
Why study ∼ ?
Gil Strang
Kostant and Wallach found a “classical” analogue of theGelfand - Kirilov theorem. They constructed a Lie Group whichacts onM(n) and preserves Ritz values.
Lemma
Λ fixes the diagonal of each B ∈MΛ(n).
Proof. B(j , j) = trace(Bj)− trace(Bj−1).
Elementary Conjugations
(i) transposition: B → BT
(ii) diagonal similarity: B → DBD−1.
Lemma (K and W)
For any generic Λ,MΛ(n) contains exactly one unit upper Hessenberg matrix.
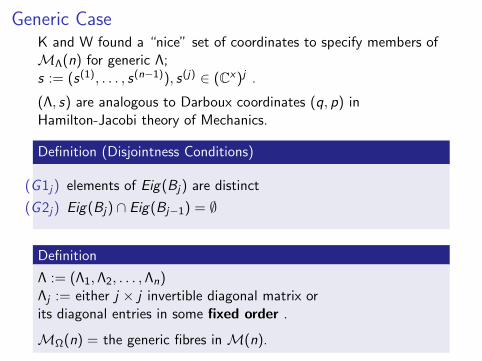
Generic CaseK and W found a “nice” set of coordinates to specify members ofMΛ(n) for generic Λ;s := (s(1), . . . , s(n−1)), s(j) ∈ (Cx)j .
(Λ, s) are analogous to Darboux coordinates (q, p) inHamilton-Jacobi theory of Mechanics.
Definition (Disjointness Conditions)
(G1j) elements of Eig(Bj) are distinct
(G2j) Eig(Bj) ∩ Eig(Bj−1) = ∅
Definition
Λ := (Λ1,Λ2, . . . ,Λn)Λj := either j × j invertible diagonal matrix orits diagonal entries in some fixed order .
MΩ(n) = the generic fibres inM(n).
Generic CaseK and W found a “nice” set of coordinates to specify members ofMΛ(n) for generic Λ;s := (s(1), . . . , s(n−1)), s(j) ∈ (Cx)j .
(Λ, s) are analogous to Darboux coordinates (q, p) inHamilton-Jacobi theory of Mechanics.
Definition (Disjointness Conditions)
(G1j) elements of Eig(Bj) are distinct
(G2j) Eig(Bj) ∩ Eig(Bj−1) = ∅
Definition
Λ := (Λ1,Λ2, . . . ,Λn)Λj := either j × j invertible diagonal matrix orits diagonal entries in some fixed order .
MΩ(n) = the generic fibres inM(n).
Generic CaseK and W found a “nice” set of coordinates to specify members ofMΛ(n) for generic Λ;s := (s(1), . . . , s(n−1)), s(j) ∈ (Cx)j .
(Λ, s) are analogous to Darboux coordinates (q, p) inHamilton-Jacobi theory of Mechanics.
Definition (Disjointness Conditions)
(G1j) elements of Eig(Bj) are distinct
(G2j) Eig(Bj) ∩ Eig(Bj−1) = ∅
Definition
Λ := (Λ1,Λ2, . . . ,Λn)Λj := either j × j invertible diagonal matrix orits diagonal entries in some fixed order .
MΩ(n) = the generic fibres inM(n).
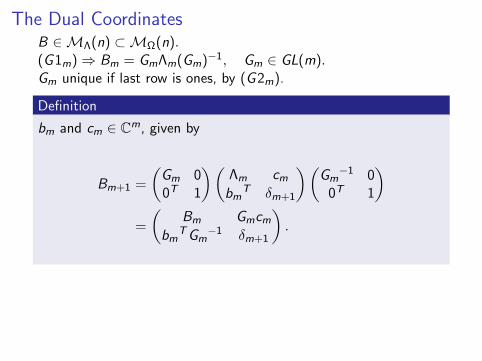
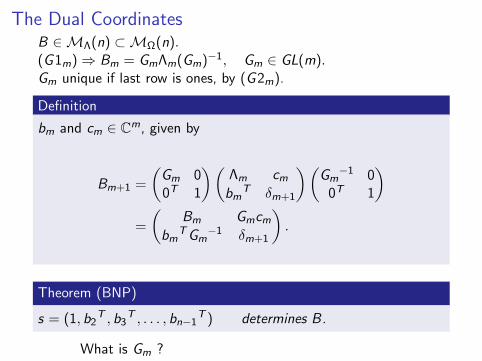
The Dual CoordinatesB ∈MΛ(n) ⊂MΩ(n).(G1m)⇒ Bm = GmΛm(Gm)−1, Gm ∈ GL(m).Gm unique if last row is ones, by (G2m).
Definition
bm and cm ∈ Cm, given by
Bm+1 =
(Gm 00T 1
) (Λm cm
bmT δm+1
) (Gm
−1 00T 1
)=
(Bm Gmcm
bmTGm
−1 δm+1
).
Theorem (BNP)
s = (1, b2T , b3
T , . . . , bn−1T ) determines B.
What is Gm ?
The Dual CoordinatesB ∈MΛ(n) ⊂MΩ(n).(G1m)⇒ Bm = GmΛm(Gm)−1, Gm ∈ GL(m).Gm unique if last row is ones, by (G2m).
Definition
bm and cm ∈ Cm, given by
Bm+1 =
(Gm 00T 1
) (Λm cm
bmT δm+1
) (Gm
−1 00T 1
)=
(Bm Gmcm
bmTGm
−1 δm+1
).
Theorem (BNP)
s = (1, b2T , b3
T , . . . , bn−1T ) determines B.
What is Gm ?
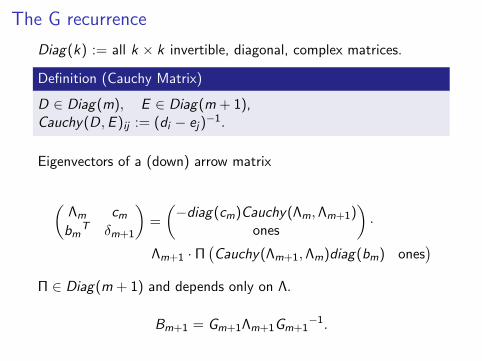
The G recurrence
Diag(k) := all k × k invertible, diagonal, complex matrices.
Definition (Cauchy Matrix)
D ∈ Diag(m), E ∈ Diag(m + 1),Cauchy(D,E )ij := (di − ej)
−1.
Eigenvectors of a (down) arrow matrix
(Λm cm
bmT δm+1
)=
(−diag(cm)Cauchy(Λm,Λm+1)
ones
)·
Λm+1 · Π(Cauchy(Λm+1,Λm)diag(bm) ones
)Π ∈ Diag(m + 1) and depends only on Λ.
Bm+1 = Gm+1Λm+1Gm+1−1.
G Recurrence cont.
So, recurrence is
G1 = (1),
Gm+1 =
(−Gmdiag(cm)Cauchy(Λm,Λm+1)
ones
), 1 ≤ m < n.
Where is bmT ?
c = (1, c2T , . . . , cn−1
T ) determine Gn and unique B ∈MΛ(n) via
B = GnΛnGn−1.
Definition χm = char. poly. of Bm.
Lemma (BNP)
diag(bm)diag(cm) = −χm+1(Λm)(χm′(Λm))−1 =: Σm.
Σm completely determined by Λ.
Blemish: Need diag(bm) invertible.
Definition
b := 1⊕ diag(b2)⊕ · · · ⊕ diag(bn−1) ∈ Diag((n2
))
The Group Action
How do we generate generic MΛ ?Gn, defined by the G recurrence, depends on (generic) Λ and b, so
Definition
G (b) := Gn ∈ GL(n)
Each B ∈MΛ(n) is uniquely given by
B = G (b)Λn(G(b))−1.
Diag((n2
)) is a commutative group under matrix multiplication
and acts onMΛ(n) via
b′ B = G (b′b)Λn(G(b′b))−1.
I ones ∈ Diag((n2
)) is the identity element.
I G (ones)Λn(G(ones))−1 is the unique unit upper Hessenberg
matrix inMΛ(n).
Regularity
Theorem (K and W)
For generic B, tril(B) and triu(B) determine each other.
Since B = LDU perhaps tril(L) (or triu(U)) serve as dualcoordinates?
Bm+1 =
(Bm vuT δm+1
)Need mild condition on B, u, v . Equivalent formulations follow.
I uT is a cyclic vector for Bm
I
(Bm
uT
)observable.
I(Bm v
)controllable.
I minimum polynomial of v for Bm has maximal degree.I centralizer of Bm = f (Bm)|f ∈ C[·].I Bm regular. (does not mean invertible).
Hence tril(B) not suitable as dual coordinate.
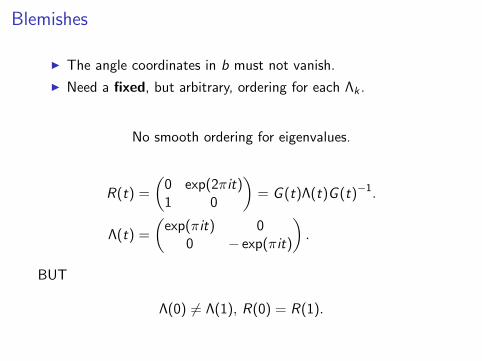
Blemishes
I The angle coordinates in b must not vanish.
I Need a fixed, but arbitrary, ordering for each Λk .
No smooth ordering for eigenvalues.
R(t) =
(0 exp(2πit)1 0
)= G (t)Λ(t)G (t)−1.
Λ(t) =
(exp(πit) 0
0 − exp(πit)
).
BUT
Λ(0) 6= Λ(1), R(0) = R(1).
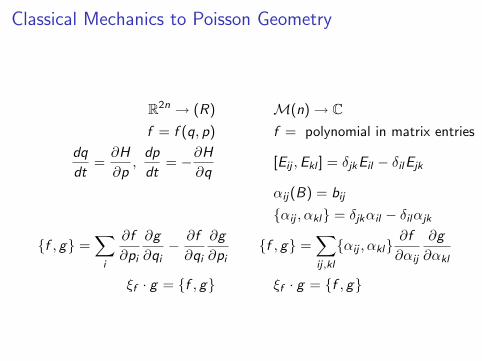
Classical Mechanics to Poisson Geometry
R2n → (R) M(n)→ Cf = f (q, p) f = polynomial in matrix entries
dq
dt=
∂H
∂p,
dp
dt= −∂H
∂q[Eij ,Ekl ] = δjkEil − δilEjk
αij(B) = bij
αij , αkl = δjkαil − δilαjk
f , g =∑
i
∂f
∂pi
∂g
∂qi− ∂f
∂qi
∂g
∂pif , g =
∑ij ,kl
αij , αkl∂f
∂αij
∂g
∂αkl
ξf · g = f , g ξf · g = f , g
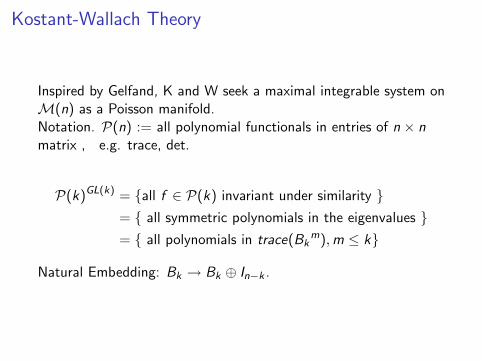
Kostant-Wallach Theory
Inspired by Gelfand, K and W seek a maximal integrable system onM(n) as a Poisson manifold.Notation. P(n) := all polynomial functionals in entries of n × nmatrix , e.g. trace, det.
P(k)GL(k) = all f ∈ P(k) invariant under similarity = all symmetric polynomials in the eigenvalues = all polynomials in trace(Bk
m),m ≤ k
Natural Embedding: Bk → Bk ⊕ In−k .
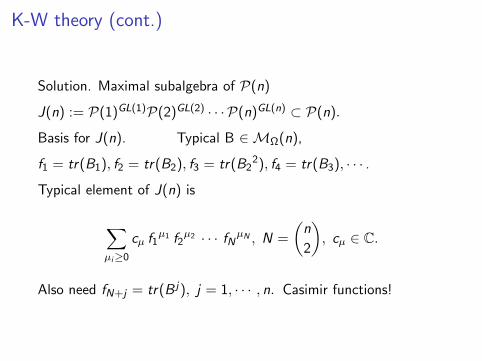
K-W theory (cont.)
Solution. Maximal subalgebra of P(n)
J(n) := P(1)GL(1)P(2)GL(2) · · · P(n)GL(n) ⊂ P(n).
Basis for J(n). Typical B ∈MΩ(n),
f1 = tr(B1), f2 = tr(B2), f3 = tr(B22), f4 = tr(B3), · · · .
Typical element of J(n) is
∑µi≥0
cµ f1µ1 f2
µ2 · · · fNµN , N =
(n
2
), cµ ∈ C.
Also need fN+j = tr(B j), j = 1, · · · , n. Casimir functions!
K-W Theory (cont.)
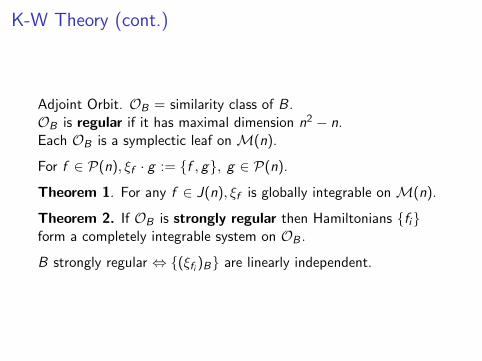
Adjoint Orbit. OB = similarity class of B.OB is regular if it has maximal dimension n2 − n.Each OB is a symplectic leaf on M(n).
For f ∈ P(n), ξf · g := f , g, g ∈ P(n).
Theorem 1. For any f ∈ J(n), ξf is globally integrable onM(n).
Theorem 2. If OB is strongly regular then Hamiltonians fiform a completely integrable system on OB .
B strongly regular ⇔ (ξfi )B are linearly independent.
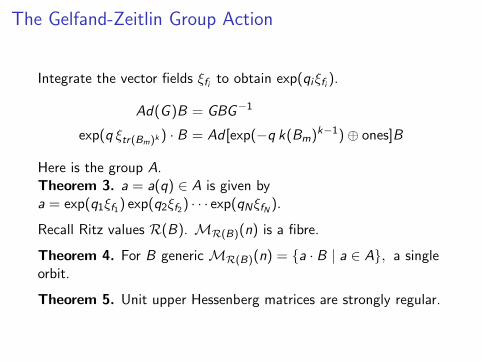
The Gelfand-Zeitlin Group Action
Integrate the vector fields ξfi to obtain exp(qiξfi ).
Ad(G )B = GBG−1
exp(q ξtr(Bm)k ) · B = Ad [exp(−q k(Bm)k−1)⊕ ones]B
Here is the group A.Theorem 3. a = a(q) ∈ A is given bya = exp(q1ξf1) exp(q2ξf2) · · · exp(qNξfN ).
Recall Ritz values R(B). MR(B)(n) is a fibre.
Theorem 4. For B generic MR(B)(n) = a · B | a ∈ A, a singleorbit.
Theorem 5. Unit upper Hessenberg matrices are strongly regular.
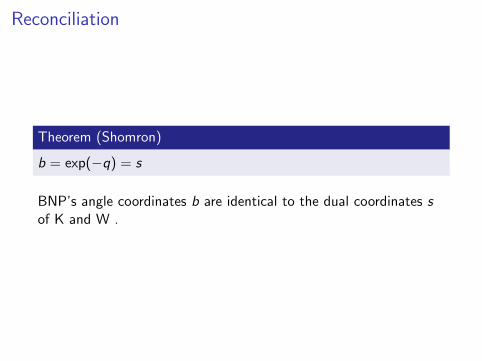
Reconciliation
Theorem (Shomron)
b = exp(−q) = s
BNP’s angle coordinates b are identical to the dual coordinates sof K and W .
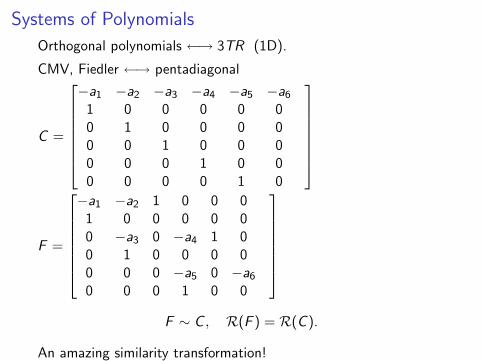
Systems of Polynomials
Orthogonal polynomials ←→ 3TR (1D).
CMV, Fiedler ←→ pentadiagonal
C =
−a1 −a2 −a3 −a4 −a5 −a6
1 0 0 0 0 00 1 0 0 0 00 0 1 0 0 00 0 0 1 0 00 0 0 0 1 0
F =
−a1 −a2 1 0 0 01 0 0 0 0 00 −a3 0 −a4 1 00 1 0 0 0 00 0 0 −a5 0 −a6
0 0 0 1 0 0
F ∼ C , R(F ) = R(C ).
An amazing similarity transformation!
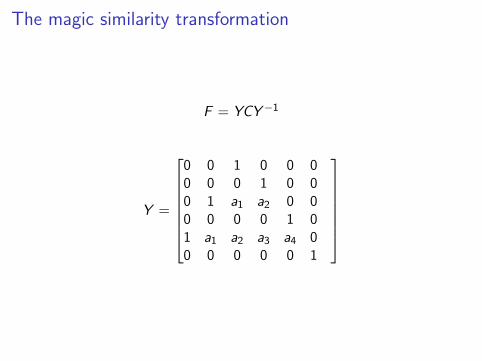
The magic similarity transformation
F = YCY−1
Y =
0 0 1 0 0 00 0 0 1 0 00 1 a1 a2 0 00 0 0 0 1 01 a1 a2 a3 a4 00 0 0 0 0 1
Related Documents











