Lecture Note: The World of Mechanism 여름에 거두는 자는 지혜로운 아들이나 추수 때에 자는 자는 부끄러움을 끼치는 아들이니라. (구약성경 잠언 10 장 5 절)

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Lecture Note: The World of Mechanism
여름에 거두는 자는 지혜로운 아들이나
추수 때에 자는 자는 부끄러움을 끼치는 아들이니라.
(구약성경 잠언 10 장 5 절)
7
운동성 (Mobility)
기구의 동작 가능성을 의미하는 정성적인 용어이며 그 정량적인 정도를 자유도라 (Degree of
freedom) 칭한다. 자유도는 특수한 경우(Nonholonomic constraint 를 갖는 경우)를 제외하고는
운동하는 시스템의 형태변화를 기술하기 위해 필요한 최소 변수 수와 일치한다.
자유도는 기구를 구성하는 링크와 조인트의 수만으로 결정될 수 있다. 이를 결정하는 식은
그 제안자의 이름을 따서 쿠츠바하 기준식(Kutzbach Criterion)이라 부른다.
평면 기구의 쿠츠바하 기준식은 다음과 같이 주어진다.
21213 jjnm
여기서 m 은 자유도, n 은 링크의 개수, 1j 은 1 자유도만 허용하는 조인트의 개수, 2j 는
2 자유도를 허용하는 조인트의 개수이다.
평면 기구 조인트 중 1 자유도만 허용하는 저차대우 조인트는 핀 조인트와 미끄럼 조인트가
있고 고차대우 조인트는 구름접촉 조인트가 있다. 이에 반해 2 자유도를 허용하는 조인트는
오직 고차대우 조인트로 미끄럼접촉 조인트가 있다.
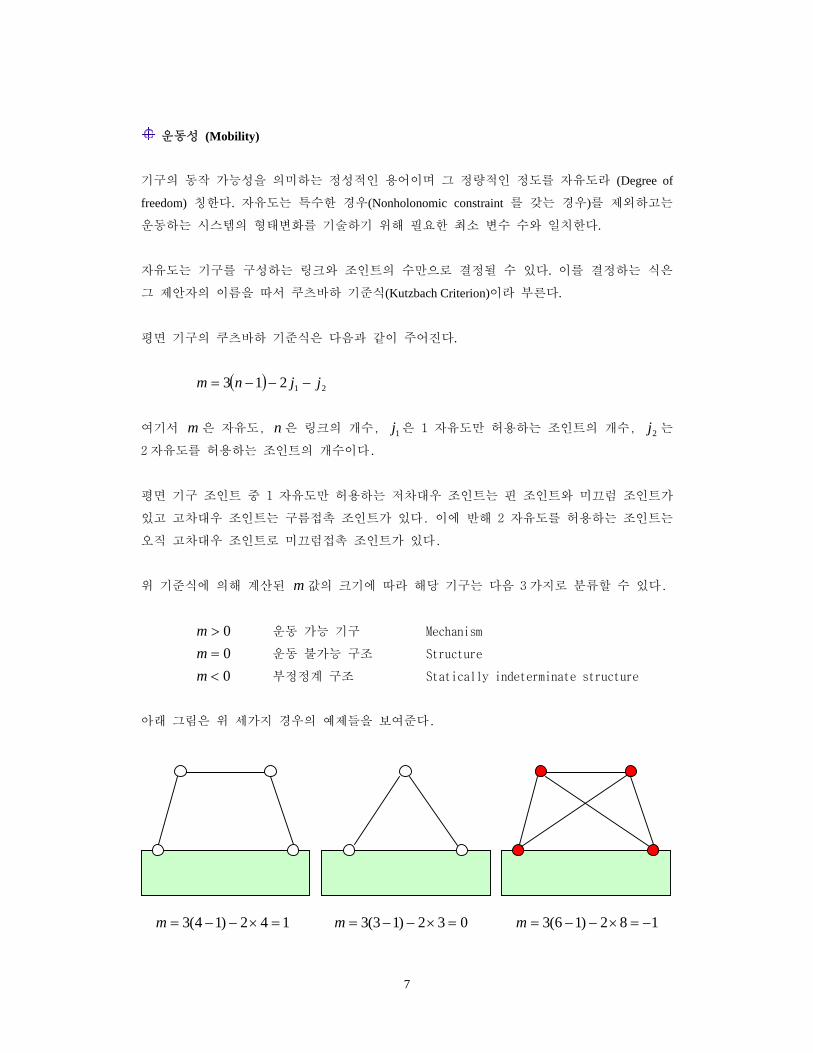
위 기준식에 의해 계산된 m 값의 크기에 따라 해당 기구는 다음 3 가지로 분류할 수 있다.
0m 운동 가능 기구 Mechanism
0m 운동 불가능 구조 Structure
0m 부정정계 구조 Statically indeterminate structure
아래 그림은 위 세가지 경우의 예제들을 보여준다.
142)14(3 m 032)13(3 m 182)16(3 m

8
1 2
3
미끄럼 접촉
위 그림 중 3 번째 그림에 나타나는 조인트들은 모두 2 중 (Double) 조인트들이다. 보기에는
1 개의 조인트로 보이지만 실제는 3개의 링크들을 연결하고 있다.
즉 위 그림에서 링크 1 과 2 를 연결하는 조인트 그리고 링크 2 와 3 을 연결하는 조인트가
각각 존재하고 있는 것이다. 위와 동일한 논리로 4 개의 링크들을 연결하는 3 중 조인트도
존재할 수 있다. 이러한 다중 조인트는 1 개로 보이지만 그 개수를 정확하게 셀 수 있어야
쿠츠바하 기준식을 통해 기구의 자유도가 정확히 계산된다.
다음은 고차대우들이 관련된 기구의 모습들을 보여준다.
위 그림 좌측 기구는 링크 3 개, 핀조인트 2 개와 미끄럼접촉 조인트 1 개로 구성되어 있다.
따라서 자유도는 다음과 같이 계산된다.
11122)13(3 m
위 그림 우측 기구는 링크 4 개, 핀조인트 3 개와 구름접촉 조인트 1 개로 구성되어 있다.
따라서 자유도는 다음과 같이 계산된다.
11232)14(3 m
구름
접촉

9
평면 기구 중 1 자유도만을 허용하는 저차대우 조인트로만 구성되어 자유도가 1 인 기구는
쿠츠바하 기준식에 의해 다음 조건식을 만족하게 된다.
12131 jnm
따라서 위 식을 정리하면
0423 1 jn
이 식을 그뤼블러(Grubler )기준식이라고 부른다. 이 식을 살펴보면, 1 자유도를 갖는 저차
대우만으로 구성된 기구는 홀수의 링크 개수를 가질 수 없는 것을 쉽게 알 수 있다. 따라서
위 식이 만족되려면 링크의 개수 n 은 짝수이어야 한다. 상기 식을 만족시키는 가장 작은
링크와 조인트 개수로 구성된 기구는 4n 이고 41 j 인 4 절 기구 혹은 슬라이더-크랭크
기구임을 알 수 있다.
공간 기구에 대한 쿠츠바하 기준식은 하나의 링크가 공간에서 6 자유도를 가지므로 다음과
같이 표시된다.
54321 234516 jjjjjnm
여기서 kj 는 k 자유도 만을 허용하는 조인트의 수를 나타낸다. 공간 기구에서 4 자유도나
5 자유도를 허용하는 조인트는 원시 조인트라 (Primitive joints) 불리우기도 한다.
이제 총 자유도가 1 인 1 자유도만을 허용하는 조인트들로 구성된 기구에 적용되는 쿠츠바하
기준식은 다음과 같다.
15161 jnm
따라서
0756 1 jn
이를 공간 기구에 대한 그뤼블러 기준식이라 부른다. 여기서 1 자유도 허용 조인트들로만
구성된 가장 간단한 형태의 공간 기구는 7n , 71 j 의 값을 갖는 것을 알 수 있다.

10
역설 기구 (Paradoxial Mechanism)
기구 중에서 실제 자유도와 쿠츠바하 기준식을 통해 계산된 자유도가 일치하지 않는 기구를
역설 기구라 한다. 쿠츠바하 기준식은 가장 보편적인 경우에 대해서만 성립하는바, 특수한
경우에는 이 기준 식이 정확한 자유도를 계산하지 못하는 경우가 발생한다. 여기서 특수한
경우란 특수한 기하학적 형태를 갖는 경우를 말한다.
평면 기구에서의 예는 다음과 같다.
2 중 평행 기구 (Double Parallelogram) 마찰차
위 기구들은 운동학적 위상이 (Kinematic Topology) 아래 기구들과 같다.
따라서 위 기구들이나 아래 기구들은 쿠츠바하 기준식에 의하면 동일하게 자유도가 0 으로
계산된다. 아래 두 기구들은 자유도가 0 으로 움직일 수 없는 것이 정확하나 위 두 기구들은
자유도가 0 으로 계산 되었음에도 불구하고 움직임이 가능하다. 움직임이 가능하다는 것은
사실은 자유도가 0 이 아니라는 것을 의미한다. 이와 같이 쿠츠바하 기준식은 일반적 경우의
자유도만을 계산할 수 있고 특수한 기하학적 조건에 의한 자유도 발생을 예측하지 못한다.
특수한 기하학적 조건으로 인하여 쿠츠바하 기준식으로 정확한 자유도가 얻어지지 못하는
기구들을 역설기구라 부른다.
구름 접촉
구름접촉
11
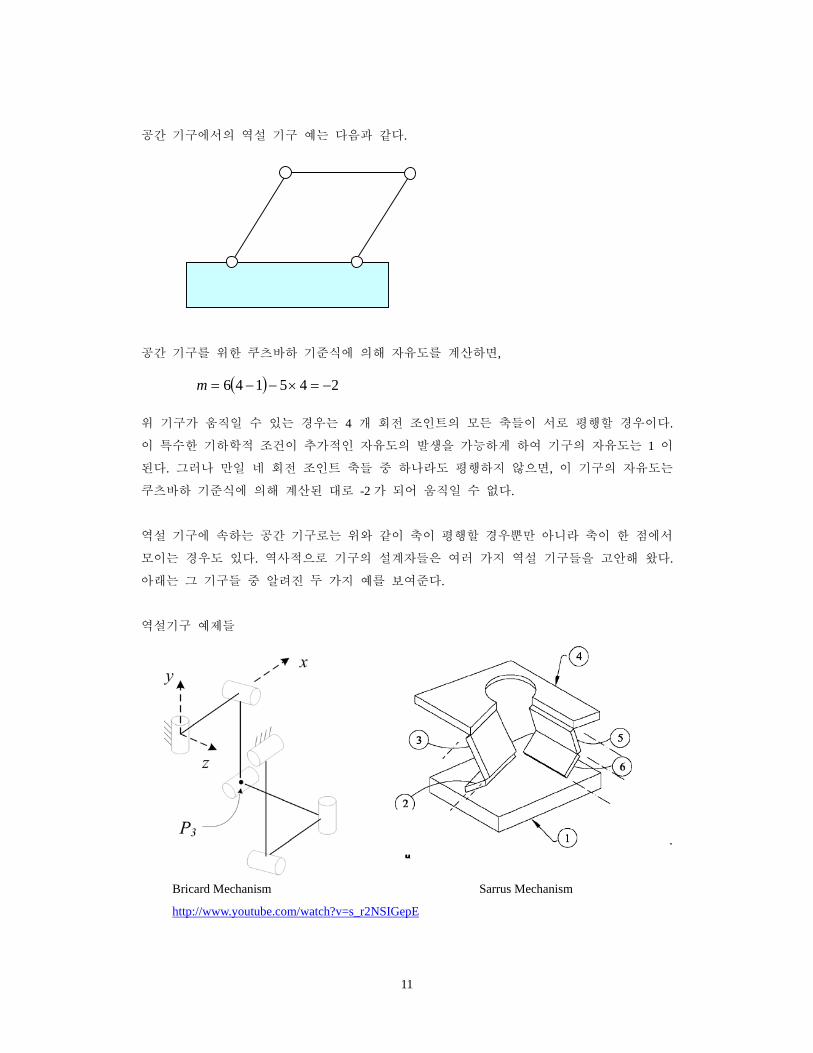
공간 기구에서의 역설 기구 예는 다음과 같다.
공간 기구를 위한 쿠츠바하 기준식에 의해 자유도를 계산하면,
245146 m
위 기구가 움직일 수 있는 경우는 4 개 회전 조인트의 모든 축들이 서로 평행할 경우이다.
이 특수한 기하학적 조건이 추가적인 자유도의 발생을 가능하게 하여 기구의 자유도는 1 이
된다. 그러나 만일 네 회전 조인트 축들 중 하나라도 평행하지 않으면, 이 기구의 자유도는
쿠츠바하 기준식에 의해 계산된 대로 -2 가 되어 움직일 수 없다.
역설 기구에 속하는 공간 기구로는 위와 같이 축이 평행할 경우뿐만 아니라 축이 한 점에서
모이는 경우도 있다. 역사적으로 기구의 설계자들은 여러 가지 역설 기구들을 고안해 왔다.
아래는 그 기구들 중 알려진 두 가지 예를 보여준다.
역설기구 예제들
Bricard Mechanism Sarrus Mechanism
http://www.youtube.com/watch?v=s_r2NSIGepE

12
기구의 분류 (Classification of Mechanisms)
‘A Thesaurus of Mechanisms”라는 저서를 통해 L. E. Torfason 은 262 개의 기구들을 운동의 전달
방법에 근거하여 분류하였으며 여기서는 그의 분류법에 의한 기구의 종류들을 설명하기로
하자.
여러 가지 기구들의 실제 형상을 살펴보려면 루루 (Reuleaux) 등이 수집한 실제의 모형들을
아래의 웹사이트를 방문하여 살펴보는 것도 좋다.
http://kmoddl.library.cornell.edu/model.php?m=reuleaux
(1) 토글 기구 (Toggle mechanism, Snap-action mechanism, Flip-flop mechanism)
토글 기구란 한 링크에 힘을 가할 때 어느 변위 한도까지는 가해지는 힘의 반대 방향으로
복원력이 작용하지만 그 한도를 넘어서면 오히려 힘이 작용하는 방향으로 기구가 추가적인
힘을 가하는 장치를 말한다. 스위치, 스프링 클립, 조임장치 (Fastener), 전원차단장치
(Circuit breaker) 등의 예에 사용되는 기구의 종류를 말한다. 아래 그림들은 전형적인 두 개의
토글 기구를 보여준다. 그림에서 하늘색 화살표가 표시된 부분은 힘이 가해지는 링크이다.
토글 기구의 실제적인 작동예제를 아래 URL 을 통하여 살펴보자.
http://www.google.co.kr/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&docid=PS
5q8N_Epswv1M&tbnid=XgaUFOoDteyU_M:&ved=0CAUQjRw&url=http%3A%2F%2Fwww.youtube.
com%2Fwatch%3Fv%3Dl-G_uejx0Rs&ei=K7cPVLKMB4-GuAS-
zoCIDA&bvm=bv.74649129,d.c2E&psig=AFQjCNGXuKgupTnEvcmc-
wSld96mrgjkTw&ust=1410402473169516
한도선
한도선

13
(2) 선형 구동기 (Linear actuator)
선형 구동기는 직선 운동을 발생시키는 장치를 말한다. 예로 암나사가 고정되고 수나사가
움직이거나 수나사가 고정되고 암나사가 움직이는 경우를 말하며, 유압 및 공압 실린더도
선형 구동기의 예에 해당한다.
선형 구동기가 작동하는 모습을 아래 URL 을 통해 살펴보자.
http://en.wikipedia.org/wiki/File:Roller_Screw.gif
(3) 미세 조정기 (Fine adjustments)
미세 운동량을 정확히 조정하는 장치이다. 예를 들어 워엄 (Worm) 기어 같은 장치나 하단에
보이는 장치가 대표적인 미세 조정기이다. 워엄 기어는 회전운동을 미세 회전운동으로 변환
하지만 하단 장치는 회전운동을 미세 직선운동으로 변환한다.
Differential Screw
미세조정기는 현미경 등 광학기구의 초점조절을 위해 흔히 사용된다.

14
(4) 고정 기구 (Clamping mechanisms)
물체를 고정시키는 기능을 하는 기구들을 말한다. 물체를 고정시키는 기구의 예로는 나사
조임 기구 (Screw clamp), 캠과 레버구동 고정장치, 바이스 (Vises), 토글 기구 두 번째 그림에
나타나는 것 같은 프레스 장치 등이 있다. 아래 그림은 토글 기능을 갖는 캠을 이용한 고정
기구를 보여준다.
아래는 또 다른 실제적인 고정 기구의 모습을 보여준다.
캠

15
(5) 래칫과 탈출 기구 (Ratchets and Escapements)
이는 운동의 방향을 통제하고 조정하는 기구를 말하며 매우 교묘한 기구들이 많이 존재한다.
이 기구들은 자물쇠, 잭, 시계장치, 그리고 간헐 운동이 필요한 장치들에 사용된다. 아래의
아래 그림 (a)에서 래칫은 한 방향 회전운동만을 가능하게 하며 이 때 멈춤쇠 3 은 중력이나
스프링의 힘에 의해 고정된다. 그림 (b)는 회전 조정이 가능하게 하는 기구이다. 그림 (c)는
그램의 기구라 불리며 시계추 운동을 발생시키는 데 사용된다. (d)에 보이는 탈출장치는 2 번
링크가 1 회 회전할 때마다 링크 3 의 걸림쇠 1 개씩 전진이 가능한 간헐운동을 발생시킨다.
(c)번 탈출기구의 실제 작동모습을 아래 URL 을 통해 관찰해 보자.
http://upload.wikimedia.org/wikipedia/commons/2/29/Anchor_escapement_animation_217x328px.gif
아래 URL 은 또 다른 래칫 기구의 작동모습을 보여준다.
http://www.youtube.com/watch?v=4wQkKdf9ReU

16
(6) 색인 기구 (Indexing mechanism)
두 링크의 운동을 맞추어 연동시키는 장치를 통칭한다. 아래 그림들은 색인 기구들의 대표
적인 형태들을 보여준다. 그림 (a)의 색인 기구에서는 링크 2 가 한 바퀴 돌 때에 링크 3 이
4 분의 1 회전이 발생한다. 이에 반해 그림 (b)의 색인 기구는, 제네바 기구라고도 부르는데,
링크 3 이 한 바퀴 돌 때 링크 2 가 4 분의 1 바퀴씩 회전한다. 물론 두 기구는 작동 시간과
휴면 시간의 비율이 서로 다르다. 그림 (c)의 색인 기구에서는 링크 3 의 위치에 따라 링크
5 의 회전이 가능한 방향과 불가능한 방향이 존재한다. 그림의 형태에서는 링크 5 가 반시계
방향으로는 회전이 가능하나 시계방향으로는 회전이 불가능 하다.
아래 URL 에는 제네바 기구를 이용한 색인기구의 작동모습을 보여준다.
http://www.youtube.com/watch?v=scsS6vI9hbk

17
(7) 흔들림 운동 기구 (Swing mechanism, Oscillating mechanism, Rocking mechanism)
출력 링크가 흔들림 운동을 하는 기구들을 말한다. 아래 그림들은 그러한 예제들이다.
위 그림 (a)에서 링크 3 과 4 는 서로 기어로 물려 있으며 크랭크 2 의 회전운동에 따라 출력
링크 4 는 회전운동의 방향을 바꾸며 진동을 하는 흔들림 운동을 한다. 그림 (b, c)의 경우는
크랭크 2 에 의해 출력 링크 4 가 흔들림 운동을 하며, 그림 (d)의 경우는 링크 2 의 회전이
링크 3 의 흔들림 운동으로 나타난다.
아래 URL 에는 흔들림 운동기구의 또 다른 작동 모습을 보여준다.
http://www.youtube.com/watch?v=pPphJTyXOng
기어물림
18
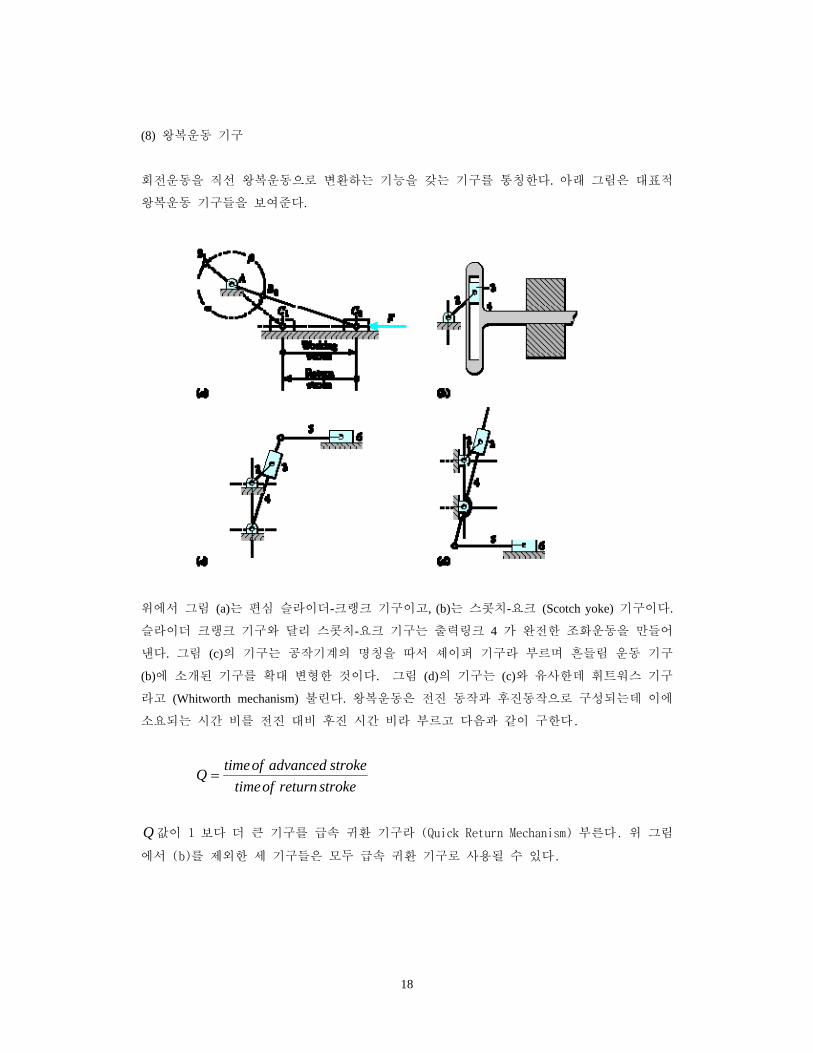
(8) 왕복운동 기구
회전운동을 직선 왕복운동으로 변환하는 기능을 갖는 기구를 통칭한다. 아래 그림은 대표적
왕복운동 기구들을 보여준다.
위에서 그림 (a)는 편심 슬라이더-크랭크 기구이고, (b)는 스콧치-요크 (Scotch yoke) 기구이다.
슬라이더 크랭크 기구와 달리 스콧치-요크 기구는 출력링크 4 가 완전한 조화운동을 만들어
낸다. 그림 (c)의 기구는 공작기계의 명칭을 따서 셰이퍼 기구라 부르며 흔들림 운동 기구
(b)에 소개된 기구를 확대 변형한 것이다. 그림 (d)의 기구는 (c)와 유사한데 휘트워스 기구
라고 (Whitworth mechanism) 불린다. 왕복운동은 전진 동작과 후진동작으로 구성되는데 이에
소요되는 시간 비를 전진 대비 후진 시간 비라 부르고 다음과 같이 구한다.
strokereturnoftime
strokeadvancedoftimeQ
Q값이 1 보다 더 큰 기구를 급속 귀환 기구라 (Quick Return Mechanism) 부른다. 위 그림
에서 (b)를 제외한 세 기구들은 모두 급속 귀환 기구로 사용될 수 있다.

19
왕복 운동기구로 사용될 수 있는 기구들을 추가로 아래 그림에 나타내었다.
완쩌 기구의 실제 작동모습을 아래 URL 을 통해 살펴 보자.
http://www.youtube.com/watch?v=t9rdMUYX2ro
완쩌 재봉기구 (Wanzer Needle-bar mechanism)
6 절 기구

20
(9) 전환 기구 (Reversing mechanism)
입력 링크 동작의 중지가 없이 출력 링크 운동의 방향을 반대 방향으로 전환시키는 기구를
통칭한다. 대표적인 예가 자동차의 후진 기어 장치가 있다.
입력 링크의 기어 A1 이 현재는 출력링크의 기어 B 와 연결되어 있으나, 입력 링크를 화살표
방향으로 이동시켜 기어 A2를 기어 C 와 연결시키면 출력 링크의 회전방향이 바뀌게 된다.
(10) 연동 기구 (Coupling and Connector)
동심이거나, 평행한, 또는 교차하는 두 링크간 운동을 연결해주는 기구들을 통칭한다. 대표
적인 연동 기구로는 기어가 있으며 풀리-벨트 기구도 이에 속한다. 아래 그림들은 두 축간
연동 기구들을 보여준다.
A1
C
B
A2

21
위 그림들도 또 다른 연동 기구들을 보여주는데 첫 번째 기구는 루루의 연동 기구라
(Reuleaux coupling) 불리며 두 번째 기구는 후크의 조인트라 (Hooke’s joint) 불린다. 이 이외
에도 클레망의 조인트 연동기구 (http://kmoddl.library.cornell.edu/resources.php?id=1928) 등 여러
형태의 연동 기구가 존재한다. 아래 URL 은 후크 조인트의 작동모습을 보여준다.
http://www.youtube.com/watch?v=TYRip-tL22A
(11) 미끄럼 운동 연결 기구 (Sliding Connector)
미끄럼 운동을 하는 두 링크를 연결하여 한쪽의 미끄럼 운동을 동일한 평면 상 다른 방향
미끄럼 운동을 만들어 내는 기구들을 통칭한다. 이러한 기능을 창출하는 방법은
1) 두 슬라이더를 강체 링크로 연결
2) 풀리나 스프라켓을 통해 벨트나 체인으로 두 슬라이더를 연결
3) 양쪽 슬라이더에 랙 기어를 파고 이 둘을 한 두 개의 피니언 기어로 연결
4) 유연성을 지닌 케이블을 이용
아래 URL 은 재미 있는 미끄럼운동 연동기구의 작동 모습을 보여준다.
http://www.youtube.com/watch?v=gxjPViALX1g

22
(12) 정지, 휴지, 그리고 주저 기구 (Stop, Pause, and Hesitation Mechanism)
기구의 운동이 완전히 정지하거나, 일시 정지하거나, 또는 속도가 현저히 줄어드는 부분을
갖는 기구들을 통칭한다. 이러한 기구의 예로는 캠 기구가 많으며, 앞서 소개된 색인 기구
중에도 이러한 기구가 많다. 또 다른 예인 아래 그림의 기구는 6 절 기구로서, 점 C 가 폐곡
쇄선의 하단부분을 통과할 때는 출력 링크 6 이 거의 움직이지 않게 된다.
아래 URL 은 크랭크 기구를 이용한 휴지기구의 작동 모습을 보여준다.
http://www.youtube.com/watch?v=7Ewb5C-UNfo
(13) 곡선 생성 기구 (Curve generator)
기구의 커플러 상의 점들은 그 기구를 구성하는 링크의 길이에 따라 또는 커플러 상의 점의
위치에 따라 여러 가지 곡선들을 생성하게 된다. 생성하는 곡선의 형태는 다양하여 직선, 원호
에서부터 여러 가지 형태가 존재한다. 이러한 곡선 생성 기구들에 대한 설계는 최근까지 도해
적 방법이 많이 사용되어 왔으나 최근에는 컴퓨터와 전산 해석을 이용한 방법들이 많이 도입
되고 있다. 아래 그림은 4 절 기구를 이용한 곡선 생성의 예를 보여준다.

23
(14) 직선 생성 기구 (Straight line generator)
곡선 생성 기구 중 특별히 직선을 만들어 내는 기구들을 통칭한다. 아래 그림들은 대표적인
직선 생성 기구들을 보여준다.
위 그림의 첫 번째 기구는 와트 기구라 (Watt’s linkage) 불리며 두 번째 기구는 로버트 기구
(Roberts’ mechanism), 그리고 세 번째 기구는 근사적인 직선을 생성해 내며 체비쉐프 기구라
(Chebychev mechanism) 불리고 마지막 기구는 포실리어 기구라 (Peaucillier mechanism) 불리며
완전한 직선을 생성해 낸다. 포실리어 기구 이외에 완전한 직선을 생성하는 기구로는 아래
보이는 스콧-러셀 기구와 판타그래프 기구가 있다.
스콧-러셀 기구 판타그래프 기구
아래 URL 은 위에 언급된 여러 가지 직선 생성기구들의 작동모습들을 보여준다.
http://www.youtube.com/watch?v=KpDpP0ZgKt8
http://www.youtube.com/watch?v=LFi0H9aYa_g
http://www.youtube.com/watch?v=66-jt_0Ijcg

24
기구학적 변환 (Kinematic Inversion)
앞 절에서 언급되었듯이 모든 기구는 고정된 틀을 (Frame) 갖는다. 동일한 기구학적 위상을
(Kinematic Topology) 갖는 기구라 할지라도 고정 틀을 어떤 것으로 정하느냐에 따라 기구의
특성이 크게 바뀐다. 동일한 위상을 갖는 기구의 고정 틀을 바꾸는 것을 기구학적 변환이라
한다. 기구의 고정 틀을 바꾸더라도 링크간 상대적 운동은 아무런 변화가 없으나 절대적인
운동의 양식은 크게 변화하게 된다. 아래 보이는 그림은 4 개 링크를 갖는 기구의 고정 틀을
바꿈으로써 기구학적 변환이 일어난 4 종류 기구의 모습을 보여준다.
그림 (a)는 슬라이더 크랭크 기구의 모습을 보여준다. 여기서 입력 링크는 4 번 실린더이며
2 번 크랭크가 출력 링크이고 고정 틀은 1 번 실린더 블록이다. 그림 (b)의 경우는 링크 2 가
고정 틀인데 링크 3 의 회전 운동에 따라 링크 1 도 회전 운동을 한다. 이러한 위상 형태는
항공기의 로터리 엔진에 사용되었다. 그림 (c)의 경우는 링크 3 이 고정 틀의 역할을 하는데
초기 증기기관 자동차에 사용된 형태이다. 마지막으로 그림 (d)의 경우는 링크 4 가 고정 틀
역할을 한다. 그림 (d)의 경우는 지금도 수도 물이 없는 곳에서 종종 볼 수 있는 우물물을
퍼 올리는 수동 펌프에 사용되는 기구이다.
기구학적 변환의 개념은 추후에 기구합성 방법을 다룰 때 다시 등장한다.

25
그라쇼프 법칙 (Grashof’s law)
모터로 구동되는 기구의 경우 입력 링크가 360 도 완전 회전이 가능하여야 한다. 완전 회전
운동 가능여부를 확인할 수 있는 간단한 방법이 그라쇼프의 법칙이다. 그라쇼프의 법칙은
다음과 같이 기술된다.
“4 절 기구의 경우 가장 긴 링크와 가장 짧은 링크의 합이 나머지 두 링크의 길이 합보다
크면 어떤 링크를 입력링크로 사용하더라도 완전 회전운동은 (360 도 회전) 불가능하다.”
즉 4 절 기구 중 한 링크를 입력링크로 사용하여 완전 회전운동 시키려면 적어도 다음 식이
만족되어야 한다.
qpls
물론 위 식이 성립한다 하더라도 모든 링크가 완전 회전운동이 가능한 입력링크로서 사용될
수 있다는 것은 아니다. 즉 아래 그림에서 (d)의 경우를 보면 입력 링크를 q 나 l 로 사용
한다면 완전 회전운동이 불가능하다.

26
그라쇼프 법칙이 성립하는 4 절 기구는 다음 3 가지로 분류된다.
1) 크랭크 로커 기구 (Crank rocker mechanism)
가장 짧은 링크가 위 그림 (a)나 (b)에서 보는 바와 같이 기반링크에 연결되어 입력
링크로 사용되는 경우이다.
2) 지연 링크 기구 (Drag link mechanism)
가장 짧은 링크가 위 그림 (c)에서 보는 바와 같이 기반링크로 사용되는 경우이다.
종종 이중 크랭크 기구라고도 부른다.
3) 이중 로커 기구 (Double rocker mechanism)
가장 짧은 링크가 위 그림 (d)에서 보는 바와 같이 입력링크나 기반링크로 사용되지
않는 경우이다. 이 경우는 완전 회전운동이 불가능하다.
루루는 (Reuleaux) s 는 크랭크, p 는 레버, l 은 커플러, 그리고 q 는 고정 틀이라 할 때
그라쇼프 법칙을 변형한 다음과 같은 관계식들을 도출하였다.
qpls
qpls
lpqs
lpqs
위 4 가지 식들이 성립하지 않을 때 발생할 수 있는 현상을 아래 그림들에 각각 나타내었다.

27
역학적 유효 비 (Mechanical advantage)
기구의 운동 시 출력 링크에 작용하는 토크 대 입력 링크에 작용하는 토크의 비를 말한다.
4 절 기구의 경우는 아래 그림에 나타나는 두 각도 와 를 이용하여 다음과 같이 역학적
유효 비를 정의하고 계산할 수 있다.
sin
sin
여기서 는 커플러와 입력 링크 사이의 각도이고 는 커플러와 출력 링크 사이의 각도로
전달 각이라고 (Transmission angle) 불린다. 역학적 유효 비가 이와 같이 계산될 수 있는
근거는 3 장 속도해석 부분에서 상세히 다루게 될 것이다.
출력 토크가 아주 작아지면 그 기구는 힘을 전달한다는 기구의 주요 목적을 달성할 수 없다.
예를 들어 의 값이 작아지면 역학적 유효 비 의 값은 0 에 가까워진다. 이러한 기구는
사용하지 않는 것이 좋다. 왜냐하면 이런 경우 아무리 입력 링크에 힘을 가하더라도 출력
링크 부위에 약간의 마찰력만 작용하여도 운동이 일어날 수 없기 때문이다. 이러한 이유로
기구 설계 시는 의 값이 설계의 질적인 우수성을 나타내게 되며 전달각의 값은 통상 작동
전 영역에 걸쳐서 45 ~ 50 이상이 되도록 설계하는 것이 보통이다.
반대로 가 0 이 되면 역학적 유효 비는 무한대의 값을 가지게 되는데 이 때는 아주 작은
입력 토크 값만으로 무한대의 출력을 발생시킬 수 있다. 기구에서 이같이 무한대의 역학적
유효 비를 갖는 위치를 토글 위치라 부른다.
입력 링크 출력 링크
Related Documents





![chapt-1 [호환 모드] - KNUwebbuild.knu.ac.kr/~app-mic/resources/lecture/Food...및 방법” 식품자체 위생 식품섭취 관련 기구, 용기, 첨가물, 포장 함께 고려되어야](https://static.cupdf.com/doc/110x72/5e59e1f8d707ba60c4181ac6/chapt-1-eeoe-app-micresourceslecturefood-e-eea-.jpg)





