Power Systems Analysis - Lecture 7 Contingency Analysis, Decoupled Analysis, Control of Power Flows 7.1 Contingency Analysis: In general we use computational tools such as the Matlab scripts in HW5 or PowerWorld to solve power flow problems. These tools are often used in industry to assess how vulnerable the system’s steady state operation will be to failures within the system. Federal regulations place require- ments on what constitutes reliable service (i.e. good power quality). These reliability conditions include • There are no transmission line or transformer limit violations. Transformers and transmission lines all have physical constraints that limit the voltages or current that these devices can carry. Violating these limits can result in device failure and as these devices are extremely expensive, it is essential that we manage the system to stay within the device ratings. • Bus voltages must be maintained between 0.95 and 1.05 pu. We measure power quality in terms of its distance from the nominal voltage and its deviation from the nominal frequency. Voltage levels must be maintained relatively constant as all user devices expect such a voltage to function properly. • The line frequency stays within 59.5 Hz to 60.5 Hz. This is not actually dealt with in the power flow analysis and must be evaluated using simulations and dynamic models. But as noted before, many user devices expect power to be delivered with a given line frequency. • In the case of the loss of a single device, these voltage and frequency standards must be maintained. This is sometimes known as n - 1 reliability. n - 1 contingency analysis is the procedure used to verify that the system has this level of n - 1 reliability and the power flow tools discussed above are often used to check this. These reliability conditions are ”legally” binding in the sense that the North American Electric Reliability Corporation (NERC) has legal authority to enforce these reliability standards. So if utilities fail to maintain adequate power quality, they can be subject to fines and other legal action. Figure 1: 37 bus system in PowerWorld We consider a rather simple example of contin- gency analysis that examines the impact of line out- ages. This example is worked out in the textbook using PowerWorld. Consider the 37 bus system whose one-line diagram is shown in Figure 1. We generate a single solution to the power flow problem using the Newton method and then check for bus violations by going to the PowerWorld Menu case information ⇒ Network ⇒ Buses We can also check line and transformer loading through the menu items case information ⇒ Network ⇒ Lines and Transformers The result from checking the buses is shown on the left side of Figure 2 in which we see that bus JO345 is most highly loaded at 103%. We can force a line overload in this system by opening the line from bus TIM69 to HANNAH69. We again solve the power flow problem and the display on the right side of Figure 2 shows there are two violations, 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
Power Systems Analysis - Lecture 7Contingency Analysis, Decoupled Analysis, Control of Power Flows
7.1 Contingency Analysis: In general we use computational tools such as the Matlab scripts in HW5 orPowerWorld to solve power flow problems. These tools are often used in industry to assess how vulnerablethe systems steady state operation will be to failures within the system. Federal regulations place require-ments on what constitutes reliable service (i.e. good power quality). These reliability conditions include
There are no transmission line or transformer limit violations. Transformers and transmission linesall have physical constraints that limit the voltages or current that these devices can carry. Violatingthese limits can result in device failure and as these devices are extremely expensive, it is essentialthat we manage the system to stay within the device ratings.
Bus voltages must be maintained between 0.95 and 1.05 pu. We measure power quality in terms of itsdistance from the nominal voltage and its deviation from the nominal frequency. Voltage levels mustbe maintained relatively constant as all user devices expect such a voltage to function properly.
The line frequency stays within 59.5 Hz to 60.5 Hz. This is not actually dealt with in the power flowanalysis and must be evaluated using simulations and dynamic models. But as noted before, manyuser devices expect power to be delivered with a given line frequency.
In the case of the loss of a single device, these voltage and frequency standards must be maintained.This is sometimes known as n 1 reliability. n 1 contingency analysis is the procedure used toverify that the system has this level of n 1 reliability and the power flow tools discussed above areoften used to check this.
These reliability conditions are legally binding in the sense that the North American Electric ReliabilityCorporation (NERC) has legal authority to enforce these reliability standards. So if utilities fail to maintainadequate power quality, they can be subject to fines and other legal action.
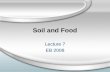
Figure 1: 37 bus system in PowerWorld
We consider a rather simple example of contin-gency analysis that examines the impact of line out-ages. This example is worked out in the textbookusing PowerWorld. Consider the 37 bus systemwhose one-line diagram is shown in Figure 1.
We generate a single solution to the power flowproblem using the Newton method and then checkfor bus violations by going to the PowerWorldMenu
case information Network Buses
We can also check line and transformer loadingthrough the menu items
case information Network Lines and Transformers
The result from checking the buses is shown on the left side of Figure 2 in which we see that bus JO345 ismost highly loaded at 103%.
We can force a line overload in this system by opening the line from bus TIM69 to HANNAH69. We againsolve the power flow problem and the display on the right side of Figure 2 shows there are two violations,
1
-
Figure 2: PWorld Contingency analysis for 37-bus system that shows bus overload (right) and line overloads(left) after one of the transmission lines has been opened
thereby implying the system does not have n 1 reliability. The objective would be to use this tool tofix that problem by finding alternative configurations of the system for which such failures do not result inviolations of the reliability conditions.
Electric utilities use elaborate computer programs such as PWorld for power-flow studies. These studiesare aimed at evaluating the adequacy of a complex interconnected network. Important information is ob-tained concerning the design and operation of systems that have not yet been built and the effects of changingexisting systems through these studies. A power-flow study for a system operating under actual or nominaloperating conditions is called a base case. The results from the base case form a benchmark for comparisonof changes in network flows and voltages under abnormal or contingency conditions. Transmission planningengineers can use these studies to discover system weaknesses such as low voltages, line overload, or load-ing conditions that seem excessive. These weaknesses can be removed by making design studies involvingchanges and/or additions to the base case system. The system model is then subjected to computer-basedcontingency testing to discover whether weaknesses arise under contingency conditions involving abnormalgeneration schedules or load levels.
A typical commercial power flow program can handle systems of more than 2000 buses, 3000 lines, and500 transformers. Data supplied to the computer must include the numerical values of the line and bus dataand an indication of whether a bus is the slack bus, a regulated bus where the voltage magnitude is heldconstant by generation of reactive power Q, or a load bus with fixed P and Q.
The output of the program consists of a number of tables. Usually the most important information to beconsidered first is the table that lists each bus number and name, bus-voltage magnitude in per unit andphase angle, generation and load at each bus in megawatts and megavars, and megavars of static capacitorsor reactors on the bus. The totals of system generation and loads are listed in megatwatts and megavars. Forthe system in example 6.3 in lecture 6 an example of such an output is shown in the following two tables
Bus Information
bus namevolts(pu)
angle(deg)
(MW) Gen (Mvar) Gen (MW) Load (Mvar) Load type
1 Birch 1.000 0. 186.81 114.50 50.00 30.99 slack2 Elm 0.982 -0.976 0. 0. 170.0 105.35 PQ3 Pine 0.969 -1.872 0. 0. 200.0 123.94 PQ4 Maple 1.020 1.523 318.00 181.43 80.00 49.58 PV
2
-
Line Flowto Bus Name (MW) (Mvar)
2 Elm 39.69 22.303 Pine 98.12 61.211 Birch -38.46 -31.244 Maple -131.54 -74.111 Birch -97.09 -63.574 Maple -102.91 -60.372 Elm 133.25 74.923 Pine 104.75 56.93
7.2 Regulating Transformers: Regulating (tap changing) transformers can be used to control the real andreactive power flows in a circuit. We now develop the bus admittance equations to include such transformersin power-flow studies. Figure 3 is a impedance diagram of a regulating transformer. The admittance Y inper unit is the reciprocal of the per-unit impedance of the transformer which has the transformation ratio1 : t as shown. The admittance Y is shown on the side of the ideal transformer nearest node j, which isthe tap-changing side. This designation is important in using the equations which are to be derived. If weare considering a transformer with off-nominal turns ratio, t may be real or imaginary such as 1.02 for anapproximate 2% boost in voltage magnitude or ejpi/60 fo a 3 phase shift.
Vi
+ +tVi
- -
Y
Vj+
-
tY
(1-t)Yt(1-t)Y j+
-Vi
+
-V
Figure 3: Tap-changing transformer: (left) impedance diagram (right) pi model.
The left side of Figure 3 shows currents Ii and Ij entering the two buses and the voltages are Vi and Vjreferred to the reference node. The complex expressions for power into the ideal transformer from bus i andbus j are, respectively,
Si = ViIi , Sj = tViI
j
Since we are assuming an ideal transformer with no losses, the power Si into the ideal transformer from busi must equal Sj out of the ideal transformer on the bus j side, and so we obtain
Ii = tIjThe current can be expressed by
Ij = (Vj tVi)Y = tYVi + YVjMultiplying by t and substituting Ii for tIj yields,
Ii = ttYVi tYVj
setting tt = |t|2 and rearranging into theYbus matrix form we get[Yii YijYji Yjj
] [ViVj
]=
[ |t|2Y tYt Y
] [ViVj
]=
[IiIj
](1)
3
-
The equivalent pi circuit corresponding to these values of node admittances can be found only if t is realbecause then Yij = Yji. This pi model is shown on the right hand side of Figure 3.
If a particular transmission line in a system is carrying too small or too large a reactive power, a regulatingtransformer can be provided at one end of the line to make the line transmit a larger or smaller reactivepower. Any appreciable drop in voltage on the primary of a transformer due to a change of load may makeit desirable to change the tap settings on the tap-changing transformer in order to maintain proper voltage atthe load. We can investigate voltage-magnitude adjustment at a bus by means of the automatic tap-changingfeature in the power flow program. For instance in the four-bus system considered in example 6.3, supposewe wish to raise the load voltage at bus 3 by inserting a magnitude-regulating transformer between the loadand the bus. With real t, in the equation (1), we set i = 3 and assign the number 5 to bus j from which theload is now to be served. To accommodate the regulator in the power-flow equations, Ybus of the networkis expanded by one row and one column for bus 5, and the elements of buses 3 and 5 in the matrix of theequation are then added to the previous bus admittance matrix to give
Ybus(new) =
Y11 Y12 Y13 0 0Y21 Y22 0 Y24 0Y31 0 Y33 + t
2Y Y34 tY0 Y42 Y43 Y44 0
0 0 tY 0 Y
The Yij elements correspond to the parameters already in the network before the regulator was added. Thevector of state variables depends on how bus 5 is treated within the power flow analysis. There are twoalternatives
Tap t can be regarded as an independent parameter with a respecified value before the power-flowsolution begins. Bus 5 can then be treated as a load bus with angle 5 and voltage magnitude |V5| tobe determined with the other state variables. In this case
x =[2 3 4 5, |V2|, |V3|, |V5|
]T Voltage magnitude at bus 5 can be prespecified. Tap t then replaced |V5| as the state variable to be
determined along with 5 at the voltage controlled bus 5. In this case
x =[2 3 4 5, |V2|, |V3|, t
]T
V1
+ +
- -
jX=j0.1
+
-
V2tV1
jX=j0.1
0.8
j0.6
I1 I2
I2(a)
I2(b)
I1(a)
I1(b)
Figure 4: Example 7.1 - impedance diagram
Example 7.1: Two transformers are connected inparallel to supply an impedance to neutral to phaseof 0.8 + j0.6 per unit at a voltage ofV2 = 1.00per unit. Transformer Ta has a voltage ratio equalto the ratio of the base voltages on the two sides ofthe transformer. This transformer has an impedanceof j0.1 per unit on the appropriate base. The sec-ond transformer Tb also has an impedance of j0.1per unit on the same base but has a step-up to-ward the load of 1.05 times that of Ta (secondarywindings on 1.05 tap). Figure 4 shows the equiv-alent circuit with transformer Ta represented by itsimpedance. Find the complex power transmitted tothe load through each transformer.
4
-
The admittance Y of each transformer is given by 1/j0.1 = j10 per unit. Hence, the currents intransformer Ta can be determined from the bus admittance equation.[
I(a)1
I(a)2
]=
[Y YY Y
] [V1V2
]=
[ j10 j10j10 j10
] [V1V2
]and the currents in transformer Tb with t = 1.05 are given by equation (1),[
I(b)1
I(b)2
]=
[t2Y tYtY Y
] [V1V2
]=
[ j11.025 j10.5j10.5 j10
] [V1V2
]
From the figure, we see that I1 = I(a)1 + I
(b)1 and likewise I2 = I
(a)2 + I
(b)2 , which means that the preceding
two matrix equations can be directed added to obtain[I1I2
]=
[ j21.025 j20.5j20.5 j20
] [V1V2
]The load current I2 is
I2 = V2Zload
= 1.00.8 + j0.6
= 0.8 + j0.6 per unit
So the second row of the equation is
I2 = 0.8 + j0.6 = j20.5V1 j20(1.0)
that we can solve to get the bus 1 voltage phasor,
V1 =0.8 + j20.6
j20.5= 1.0049 + j0.0390 per unit
SinceV1 andV2 are now known, we return to the admittance equation for transformer Ta to obtain
I(a)2 = j10V1 j10V2 = j10(1.0049 + j0.0390 1.0)
= 0.390 + j0.049 per unit
and similarly for transformer Tb current
I(b)2 = j10.5V1 j10V2 = j10.5(1.0049 + j0.0390) j10
= 0.41 + j0.551 per unit
Hence the complex power outputs of the transformers are
STa = V2[I
(a)2
]= 0.39 + j0.049 per unit
STb = V2[I
(b)2
]= 0.41 + j0.551 per unit
7.3 Decoupled Power Flow Analysis: Inverting the Jacobian is the most computationally intensive part ofthe Newton-Raphson recursion. Several approximations of the Jacobian are used to reduce this complexity.One common group of methods is referred to as decoupled power flow (DPF).
5
-
The Newton-Raphson recursion in power flow is based on the following equation
P (x(k)) P (x(k))|V|
Q(x(k))
Q(x(k))|V|
[ (k)|V(k)|
]=
[P (x(k))
Q(x(k))
]= f(x(k))
where
P (x(k)) =
P2(x(k)) + PD2 PG2
...Pn(x
(k)) + PDn PGn
, Q(x(k)) = Q2(x
(k)) +QD2 QG2...
Qn(x(k)) +QDn QGn
In many power systems, the off-diagonal matrices, P (x
(k))|V| and
Q(x(k)) are small, so we can approximate
them as zero and thereby reduce the update equation to
[
P (x(k)) 0
0 Q(x(k))
|V|
] [(k)
|V(k)|]
=
[P (x(k))
Q(x(k))
]Separating these equations yields the following pair of updates
(k) = [P (x(k))
]1P (x(k))
|V(k)| = [Q(x(k))
|V(k)|
]1Q(x(k))
This approximation occurs in power systems in which |Gij | |Bij |. In general ij is small so we can letsin ij 0. With this last set of assumptions we then see that
Pi|Vj | = |Vi|(Gij cos ij +Bij sin ij) 0Qij
= |Vi||Vj |(Gij cos ij +Bij sin ij) 0
thereby providing a justification for the DPF approximation.A modification of this approach known as fast decoupled power flow (FDPF) goes one step further and
assumes that |Gij | = 0, sin ij = 0 and cos ij = 1. We assume the slack bus voltage is |V1| = 1 and sothe update equation for all other buses becomes
(k) = B1P (x(k))
|V(k)|
|V(k)| + B1 Q(x(k))
|V(k)|The susceptance matrix now becomes a good approximation to the Jacobian and is essentially independentof voltage and angle. This means, of course, that we only have to do the matrix inversion once, at thebeginning of the algorithm, thereby avoiding recomputation of the Jacobian and its inverse in each iteration.
6
-
Figure 5: Example 7.2
Example 7.2 FDPF Three Bus Example: This ex-amples one line diagram is shown in Figure 5. Thebus admittance matrix for this system is
Ybus = j
34.3 14.3 2014.3 24.3 1020 10 30
Since well treat bus 1 as the slack bus, the reducedsusceptance matrix is
Br =
[ 24.3 1010 30
]If we use the fast decoupled power flow analysis, then we only have to invert the approximate Jacobian once,
J1 = B1r =[ 0.0477 0.01590.0159 0.0389
]So for the initial iteration (k = 0) we select a flat start in which
(0) =
[
(0)2
(0)3
]=
[00
], |V(0)| =
[|V(0)2 ||V(0)3 |
]=
[11
]We also need the initial power mismatch (per unit) for the real and reactive power on bus 2. We assume
P (0) =
[22
], Q(0) =
[11
]The first recursion k = 1 yields[
(1)2
(3)3
]=
[00
]+
[ 0.0477 0.01590.0159 0.0389
] [22
]=
[ 0.1272.1091
][|V(1)2 ||V(1)3 |
]=
[11
]+
[ 0.0477 0.01590.0159 0.0389
] [11
]=
[0.93640.9455
]
We need to recompute the mismatches P(k)i
|V(k)i |and Q
(k)i
|V(k)i |to do the next recursion
Pi(x(k))
|V(k)i |=
n`=1
|V(k)` |(Gi` cos
(k)i` +Bi` sin i`
)+PDi PGi|V(k)i |
Qi(x(k))
|V(k)i |=
n`=1
|V(k)` |(Gi` sin
(k)i` Bi` cos i`
)+QDi QGi|V(k)i |
The power mismatches computed after this recursion are[
(2)2
(2)3
]=
[ 0.12720.1091
]+
[ 0.0477 0.01590.0159 0.0389
] [0.1510.107
]=
[ 0.13610.1156
][V
(2)2
V(2)3
]=
[0.93640.9455
]+
[ 0.0477 0.01590.0159 0.0389
] [0.1850.1780
]=
[0.92480.9357
]We then compute the mismatch as before and if it is small enough, then stop. Otherwise continue. Like alllazy bods, we write a MATLAB script to do the recursion for us
7
-
%fpdf 3 bus exampleB = [-34.3 14.3 20; 14.3 -24.3 10; 20 10 -30];Br = B(2:3,2:3);
Pd2 = 2; Pg2 = 0;Qd2 = 1; Qg2 = 0;Pd3 = 2; Pg3 = 0;Qd3 = 1; Qg3 = 0;V1=1;del1=0;V2=1;del2=0;V3=1;del3=0;
del = [del2 ; del3];V = [V2 ; V3];delp=del;Vp = V;DelPV = [Pd2;Pd3];DelQV = [Qd2;Qd3];
k=0;data=[ k del V norm([DelPV;DelQV])];
while (norm([DelPV;DelQV])> 1.e-4);
del = delp + inv(Br)*DelPVV = Vp + inv(Br)*DelQV
V2=V(1);V3=V(2);del2=del(1);del3=del(2);DelPV = [V1*B(2,1)*sin(del2-del1)+V3*B(3,2)*sin(del2-del3)+(Pd2-Pg2)/V2;
V1*B(1,3)*sin(del3-del1)+V2*B(2,3)*sin(del3-del2)+(Pd3-Pg3)/V3];DelQV = [-V1*B(2,1)*cos(del2-del1)-V2*B(2,2)-V3*B(3,2)*cos(del2-del3)+(Qd2-Qg2)/V2;
-V1*B(1,3)*cos(del3-del1)-V2*B(2,3)*cos(del3-del2)-V3*B(3,3)+(Qd3-Qg3)/V3];
data = [data ; k del V norm([DelPV; DelQV])];
delp = del; Vp = V; k=k+1;if (k >= 10) break; end;
end;data
So after the final recursion, we get
k 2 3 |V2| |V3| P2/|V2| P3/|V3| Q2/|V2| Q3/|V3| mismatch0 0 0 1.0000 1.0000 2.0000 2.0000 1.0000 1.0000 3.16231 -0.1272 -0.1091 0.9364 0.9455 0.1506 0.1081 0.1850 0.1780 0.31672 -0.1361 -0.1156 0.9248 0.9357 0.0313 0.0192 0.0306 0.0262 0.05453 -0.1379 -0.1169 0.9229 0.9342 0.0053 0.0028 0.0058 0.0047 0.00964 -0.1382 -0.1171 0.9225 0.9339 0.0010 0.0005 0.0010 0.0008 0.00175 -0.1382 -0.1171 0.9225 0.9338 0.0002 0.0001 0.0002 0.0001 0.00036 -0.1382 -0.1171 0.9225 0.9338 0.0000 0.0000 0.0000 0.0000 0.0001
which means that the final answer is
V2 = 0.9224 7.9183, V3 = 0.9338 6.0793
The next most restrictive approximation is called the DC power flow approximation. In this case, wecompletely ignore the reactive power and assume that all voltages are always at 1.0 per unit and we ignore
8
-
line conductance. This turns the power flow into a set of linear equations that can be directly solve as
= B1P
G
T1 T2345 kVLine 1 - 50 mi
2
3
400 MVA 15 kV
Y Y
G
Line
2 -
100
mi
Line
3 -
200
mi
400 MVA 15/345 kV
800 MVA 345/15 kV
280 Mvar 800 MW
800 MVA 15 kV
520 MW
40 Mvar 80 MW
1 4 5
Figure 6: Example 7.3
Example 7.3: Lets consider the five bus systemshown in Figure 6. With bus 1 as the slack bus, theB matrix and P vector are
B =
30 0 10 20
0 100 100 010 100 150 4020 0 40 110
, P =8.04.400
So the DC power flow solution for the bus angles is
= B1P =
0.3260.0090.0350.072
radians =18.70.5212.004.125
degrees7.4 Control of Power Flows: The following means are used to control a systems power flows
Control of the generators real power output and voltage level Switching of shunt capacitor banks and static var compensators to adjust line voltages (reactive power
support)
Control of tap-changing and regulating transformers to control voltageThe objective is to find the settings for these controls that ensure n 1 reliability.
P,Q
I ++
--V = |V|E = |E|
jX
Figure 7: Generator Model
The main method for controlling power flows is to adjustthe power delivered by the generator. This is usually donethrough control of the power angle and voltage. To see whyangle and voltage control power output consider the generatormodel shown in Figure 7. In this modelV is the terminal volt-age and E is called the excitation voltage. The power angle is and X is the synchronous reactance of the machine.
The generator current is
I =|E|ej V
jX
so the complex power delivered by the machine is
S = P + jQ = VI = V( |E|ej V
jX)
=|V||E|(j cos + sin ) j|V|2
X
and so the real and reactive powers are
P = Re(S) =|V||E|X
sin
Q = Im(S) =|V|X
(E cos V)
9
-
The important thing to note about this last equation is that if the excitation voltage is held relative constantthen we can control the real power output through control of the power angle, . On the other hand since ourexpression for Q has a cos in it that would be close to 1 for small , then we should see that the excitationvoltage E can be used to control the reactive power delivered/absorbed by the generator. In practice, onewould use power-flow analysis in conjunction with an optimization algorithm to determine the optimalsetting for the generator real and reactive power output. This problem will be discussed later and is calledthe optimal power flow or OPF problem.
Another way of controlling voltage in a line is through shunt capacitor banks. The addition of a shuntcapacitor bank will modify the generator circuit shown in Figure 8. In this case we have a generator withexcitation voltage E connected to a transmission line whose series impedance is R + jX . Before thecapacitor bank is connected the bus voltage V equals |E|. When the capacitor bank is connected, wethen get a current flow Ic which essentially causes voltage seen at the receiving end V to rotate by anamount that is determine by the size of the capacitor. As discussed earlier, capacitor banks act as reactivepower loads and they are essentially used to control bus voltage.
+
-
E = |E| V +
-
I C jX R
C
sw
V
E = |E|
I C
RI C
jXI C
Figure 8: Shunt Capacitor Bank Controls
The last important class of controls we already discussed above. These are tap-changing transformers thatare used to directly adjust the voltage over one of the transformer windings. There are other available controlmechanisms that include the switching on/off of feeder lines (through breakers). Such controls can be usedto redirect power flows and thereby avoid overloading specific lines in the system. We can also, sometimes,directly command changes to the load. This is sometimes referred to as demand-side management. It wouldinvolve, for instance, slightly adjusting the setpoint of an air conditioner unit, so that the user doesnt see theimpact, but there is a small decrease in actual power consumption by the unit. While doing this for a singleunit may not be that effective, if one aggregates such small efficiencies over tens of thousands of customers,the benefits can be very important to the utility in terms of helping to reduce the variability in the demandside of the system.
Determining the operating point of these controls is usually done in a trial-and-error basis using com-puter tools such as Power World to test out different scenarios and see which ones satisfy the n1 reliabilitycondition. In some cases, engineering judgement and some simple relationships characterizing the sensitiv-ity of line power to generator control, or bus voltage to reactive power controls can be used to estimate howmuch reactive or real power should be adjusted. These estimates would be used as starting points for asolution that would then be adjusted through the use of computer tools.
Z=.5j
jQ G2
V2
S = 1 puD1
V = 1 0
S 12-S 21 S = 1 puD2
S G1
Figure 9: Voltage Sag at end of Transmis-sion Line
As an example, lets consider the problem of sizing a shuntcapacitor to handle the voltage sag at the end of a transmissionline. For most lines, the resistance is small so that Z = jX . Inthis case the real power sent equals the active power received(no losses). But the sent and received reactive power will bedifferent. In particular, the real power sent and received be-tween bus 1 and 2 in the system shown in Figure 9 is
P12 = P21 = |V1||V2|X
sin 12
10
-
The reactive power sent and received however, will be different since
Q12 =|V1|2X |V1||V2|
Xcos 12
Q21 =|V2|2X |V2||V1|
Xcos 12
If the generated reactive power at bus 2, QG2 is zero, then what is the voltage magnitude at bus 2? WithQG2 = 0 we have
0 =|V2|2|X
|V2||V1|X
cos 12
Since P12 = P12 = PD2 = 1, we have
1 =|V1||V2|
Xsin 12
Simplifying the first equation yields,
|V2| = |V1| cos 12and simplifying the second equation yields,
|V2| = X|V1| sin 12 .
SinceV1 = 10 we can further simplify to see that |V2| = cos 12. Inserting this into the second relationyields,X = sin 12 cos 12. In Figure 9,X = 1/2. So we now end up with two equations and two unknowns
1
2= sin 12 cos 12, |V2| = cos 12
Solving both equations we get 12 = 45 and so |V2| = 1/2.Note that the voltage at the receiving end is 1/2 pu, this is a tremendous loss in voltage and clearly does
not satisfy the requirement that the user voltages stay within 5 percent of 1 pu. So we add some reactivepower support by connecting a capacitor to the end of the line. So if we require |V2| = 1, then
P12 =|V1||V2|
Xsin 12 = 2 sin 12 = 1
which means the angle across the line 12 must equals 30. The reactive power absorbed by the shuntcapacitor is QG2 and satisfies
QG2 = Q21 =|V2|2|X
|V2||V1|X
cos 12 = 2 2 cos 30 = 0.268
So we must size the capacitor to deliver 0.268 pu of reactive power support.
Figure 10: Line SensitivityProblem
In many cases, we need to control the amount of power flowing through atransmission line. To do this, we need to to determine how a change in gener-ation at bus k affects the power flow on a line from bus i to bus j (Figure 10).Well refer to this as the line sensitivity problem. The assumption here is thatthe change in generation is absorbed by the slack bus.
One way to address this problem is to compare the power flow before andafter generator output was changed. The following example for a three bus
11
-
Figure 11: Line Sensitivity Example (left) initial power flows with line violation (right) adjusted systemwith line violation removed
system solved using the PowerWorld tool shows how this is done. Initially our system has a 124% overloadon the line from bus 1 to 2. But by increasing the generation at bus 3 by 95 MW (and also decreasinggeneration by a similar amount on bus 1), there is a 31.3 MW drop in power flow across line to 1 and 2,which removes the overload condition as shown in Figure 11.
Computing such control sensitivities through this trial-and-error process, however, is very tedious and timeconsuming. An alternative approach would analytically estimate these values and then use the simulator tocheck or adjust your answer. To see how this is done, consider the power flow from bus i to bus j
Pij |Vi||Vj |Xij
sin(i j) i jXij
So Pij ijXij and so we need to compute is the sensitivity of the power angle across the line as afunction of a change in generation power, ijPGk .
We can obtain such analytic sensitivities from the fast decoupled power flow (FDPF) analysis. From FDPFwe know
= B1P (x)
So to get the change in due to a change of generation at bus k, we set P (x) to zero except at theposition k which we set equal to 1. We then use this test P vector to compute using the precedingFDPF equation. The resulting vector can then be used to evaluate the change in line power over all linesin the network.
Lets return to the three bus example again. For that earlier example, Zline = j0.1 and the bus admittancematrix is
Ybus = j
20 10 1010 20 1010 10 20
Since bus 1 is the slack bus the reduced susceptance matrix is
Br =
[ 20 1010 20
]Hence for a change of generation at bus 3 we get[
23
]=
[ 20 1010 20
]1 [01
]=
[0.03330.0667
]
12
-
and so P31 = 0.066700.1 = 0.667 pu. Similar computations for the other lines are P32 = 0.33 puand P21 = 0.33 pu. Now lets compare this to the earlier PowerWorld result. Using PowerWorld, wefound that a 95 MW change in generation at bus 3 resulted in a drop of 31.3 MW across line 1 and 2. This iscertainly consistent with the sensitivities computed above using the FDPF approach to analytically assessingline sensitivities.
13
Related Documents