1 Marc Moonen Dept. E.E./ESAT-STADIUS, KU Leuven [email protected] homes.esat.kuleuven.be/~moonen/ Digital Audio Signal Processing DASP Lecture-6: Acoustic Feedback Control Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 2 / 34 Outline • Introduction - Acoustic Feedback Control (AFC) • AFC Basics – Nyquist Stability & Maximum Stable Gain • AFC Methods • Notch-Filter-Based Howling Suppression (NHS) • Adaptive Feedback Cancellation (AFC) Reference : T. van Waterschoot &M. Moonen, “Fifty years of acoustic feedback control: state of the art and future challenges,” Proc. IEEE, vol. 99, no. 2, 2011, pp. 288-327.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Marc Moonen Dept. E.E./ESAT-STADIUS, KU Leuven
[email protected] homes.esat.kuleuven.be/~moonen/
Digital Audio Signal Processing
DASP
Lecture-6: Acoustic Feedback Control
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 2 / 34
Outline
• Introduction - Acoustic Feedback Control (AFC)
• AFC Basics – Nyquist Stability & Maximum Stable Gain
• AFC Methods • Notch-Filter-Based Howling Suppression
(NHS)
• Adaptive Feedback Cancellation (AFC)
Reference : T. van Waterschoot &M. Moonen, “Fifty years of acoustic feedback control: state of the art and future challenges,” Proc. IEEE, vol. 99, no. 2, 2011, pp. 288-327.

2
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 3 / 34
Acoustic Feedback Control (AFC) Single channel AFC = - One loudspeaker - One microphone Multi-channel AFC = ……….. (not treated here)
Applications
– Hearing aids – Sound reinforcement
Introduction
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 4 / 34
• “Desired” system transfer function:
• Closed-loop system transfer function:
– Spectral coloration – Acoustic echoes – Risk of instability
• Loop response: – Loop gain – Loop phase
AFC Basics

3
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 5 / 34
• Nyquist stability criterion: – If there exists a radial frequency ω for which
then the closed-loop system is unstable – If the unstable system is excited at the critical frequency ω,
then an oscillation at this frequency will occur = howling • Maximum stable gain (MSG):
– Maximum forward path gain before instability
– Desirable gain margin 2-3 dB (= MSG – actual forward path gain)
AFC Basics
if G has flat response [Schroeder, 1964]
B=bandwidth
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 6 / 34
1. Phase modulation (PM) methods (not addressed here)
– Apply frequency/phase modulations in forward path
2. Spatial filtering methods – Microphone beamforming to reduce direct coupling (Lecture 2)
3. Gain reduction methods – (Frequency-dependent) gain reduction after howling detection – Example: Notch-filter-based howling suppression (NHS)
4. Room modeling methods – Adaptive inverse filtering (AIF): adaptive equalization of acoustic
feedback path response (not addressed here)
– Adaptive feedback cancellation (AFC): adaptive prediction and subtraction of feedback component in microphone signal
AFC Methods

4
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 7 / 34
Notch-Filter-Based Howling Suppression (NHS)
• Gain reduction after howling detection
• NHS subproblems: – Howling detection – Notch filter design
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 8 / 34
Notch-Filter-Based Howling Suppression (NHS)

5
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 9 / 34
Notch-Filter-Based Howling Suppression (NHS)
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 10 / 34
Adaptive Feedback Cancellation (AFC)
• Predict and subtract entire feedback signal (i.o. only howling component) in microphone signal
• Requires adaptive estimation of acoustic feedback path model
• Similar to AEC, but much more difficult due to closed signal loop
6
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 11 / 34
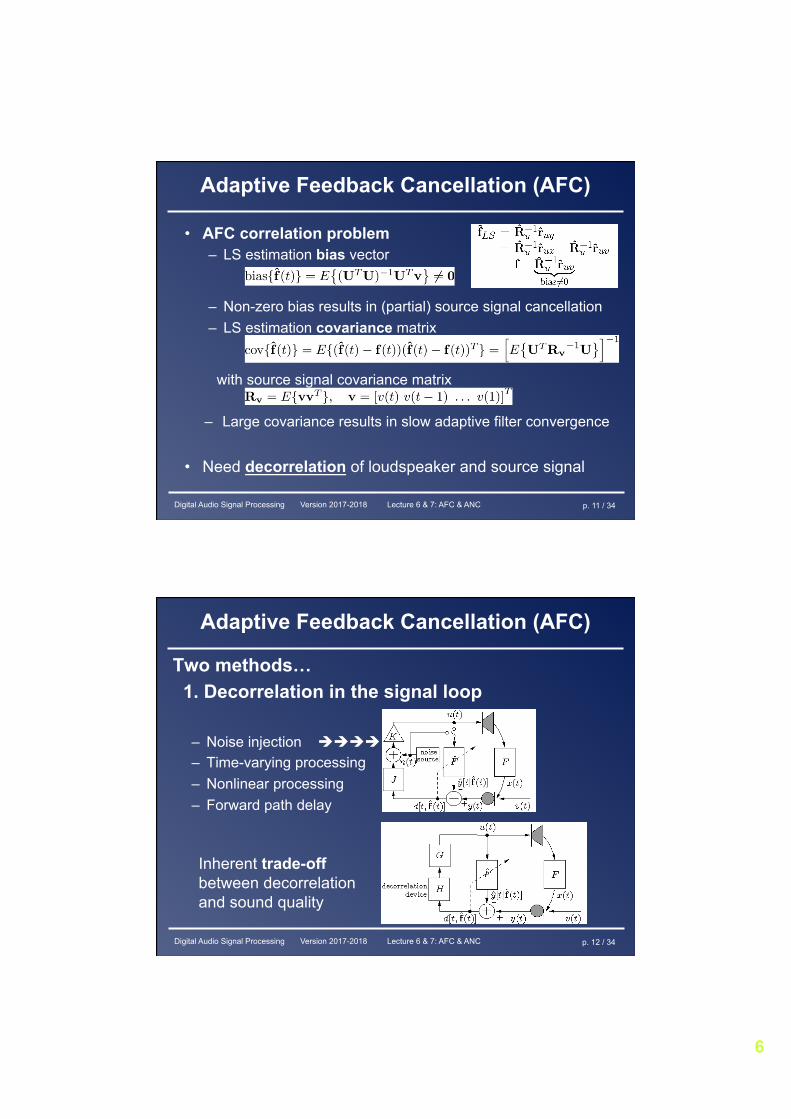
Adaptive Feedback Cancellation (AFC)
• AFC correlation problem – LS estimation bias vector
– Non-zero bias results in (partial) source signal cancellation – LS estimation covariance matrix
with source signal covariance matrix – Large covariance results in slow adaptive filter convergence
• Need decorrelation of loudspeaker and source signal
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 12 / 34
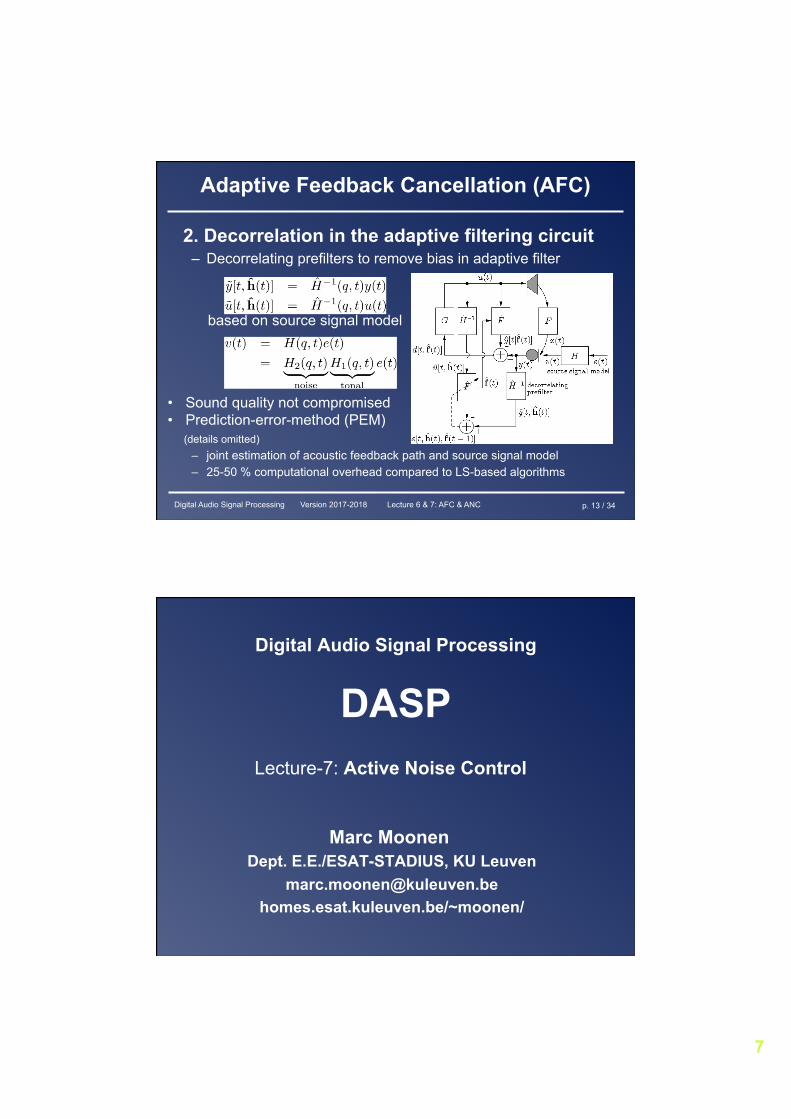
Adaptive Feedback Cancellation (AFC)
Two methods… 1. Decorrelation in the signal loop
– Noise injection èèèè – Time-varying processing – Nonlinear processing – Forward path delay
Inherent trade-off between decorrelation and sound quality
7
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 13 / 34
Adaptive Feedback Cancellation (AFC)
2. Decorrelation in the adaptive filtering circuit – Decorrelating prefilters to remove bias in adaptive filter
based on source signal model
• Sound quality not compromised • Prediction-error-method (PEM) (details omitted)
– joint estimation of acoustic feedback path and source signal model – 25-50 % computational overhead compared to LS-based algorithms
Digital Audio Signal Processing
DASP
Lecture-7: Active Noise Control
Marc Moonen Dept. E.E./ESAT-STADIUS, KU Leuven
[email protected] homes.esat.kuleuven.be/~moonen/
8
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 15 / 34
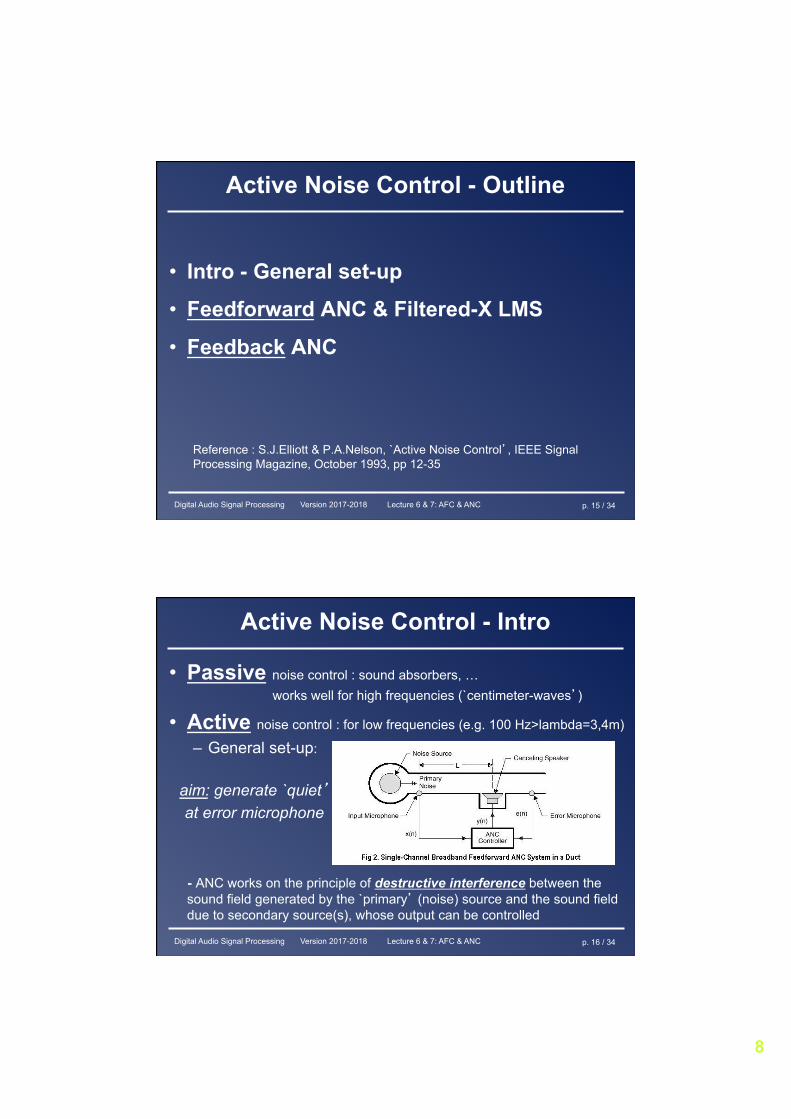
Active Noise Control - Outline
• Intro - General set-up
• Feedforward ANC & Filtered-X LMS
• Feedback ANC
Reference : S.J.Elliott & P.A.Nelson, `Active Noise Control’, IEEE Signal Processing Magazine, October 1993, pp 12-35
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 16 / 34
Active Noise Control - Intro
• Passive noise control : sound absorbers, … works well for high frequencies (`centimeter-waves’)
• Active noise control : for low frequencies (e.g. 100 Hz>lambda=3,4m)
– General set-up: - ANC works on the principle of destructive interference between the
sound field generated by the `primary’ (noise) source and the sound field due to secondary source(s), whose output can be controlled
aim: generate `quiet’ at error microphone
9
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 17 / 34
Active Noise Control - Intro – Secondary source(s) :
• mostly loudspeakers • sometimes mechanical `shakers’ (excitation of structural
components, ‘active vibration control’)
– Signal processing task : generation/control of electrical signal(s) to steer secondary source(s)
– Two approaches will be considered: • Feedforward ANC : solution based on `filtered-X LMS’ • Feedback ANC : see also control courses
– PS: First ANC Patent in 1936 (!) (Paul Lueg) `describes basic idea of measuring a sound field with a microphone, electrically manipulating the resulting signal and then feeding it to a secondary source…’
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 18 / 34
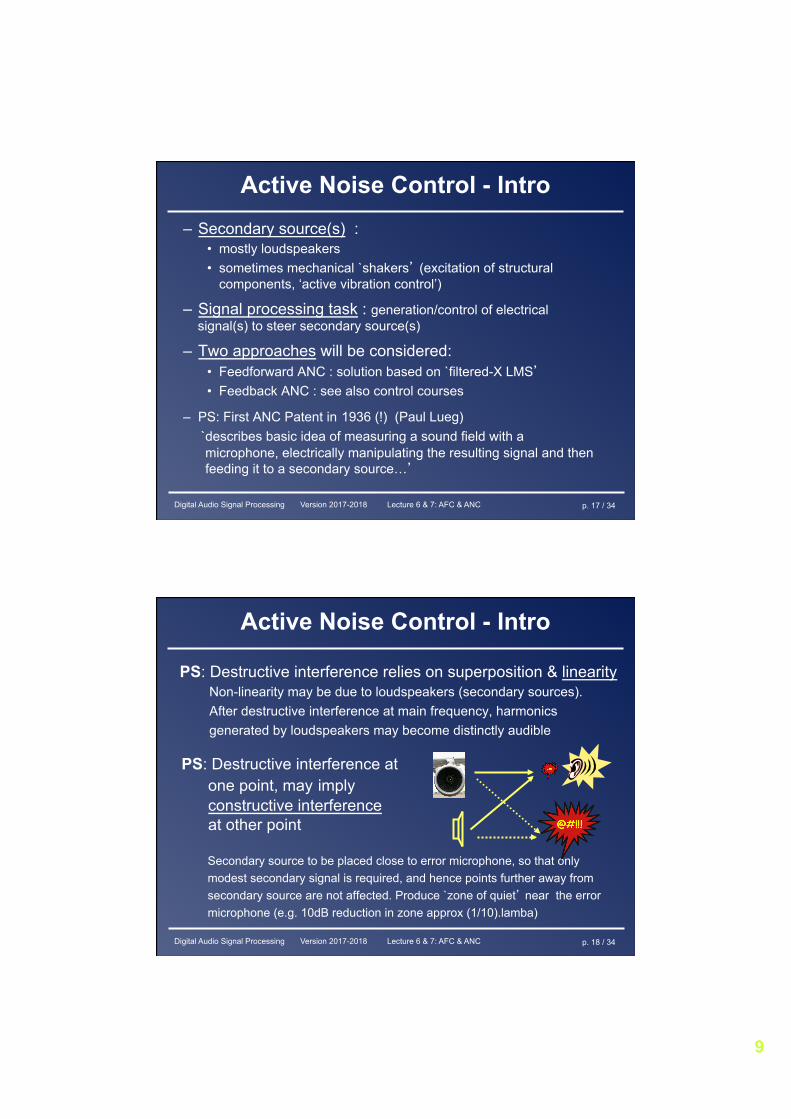
Active Noise Control - Intro
PS: Destructive interference relies on superposition & linearity Non-linearity may be due to loudspeakers (secondary sources). After destructive interference at main frequency, harmonics generated by loudspeakers may become distinctly audible
PS: Destructive interference at one point, may imply constructive interference at other point
Secondary source to be placed close to error microphone, so that only modest secondary signal is required, and hence points further away from secondary source are not affected. Produce `zone of quiet’ near the error microphone (e.g. 10dB reduction in zone approx (1/10).lamba)
10
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 19 / 34
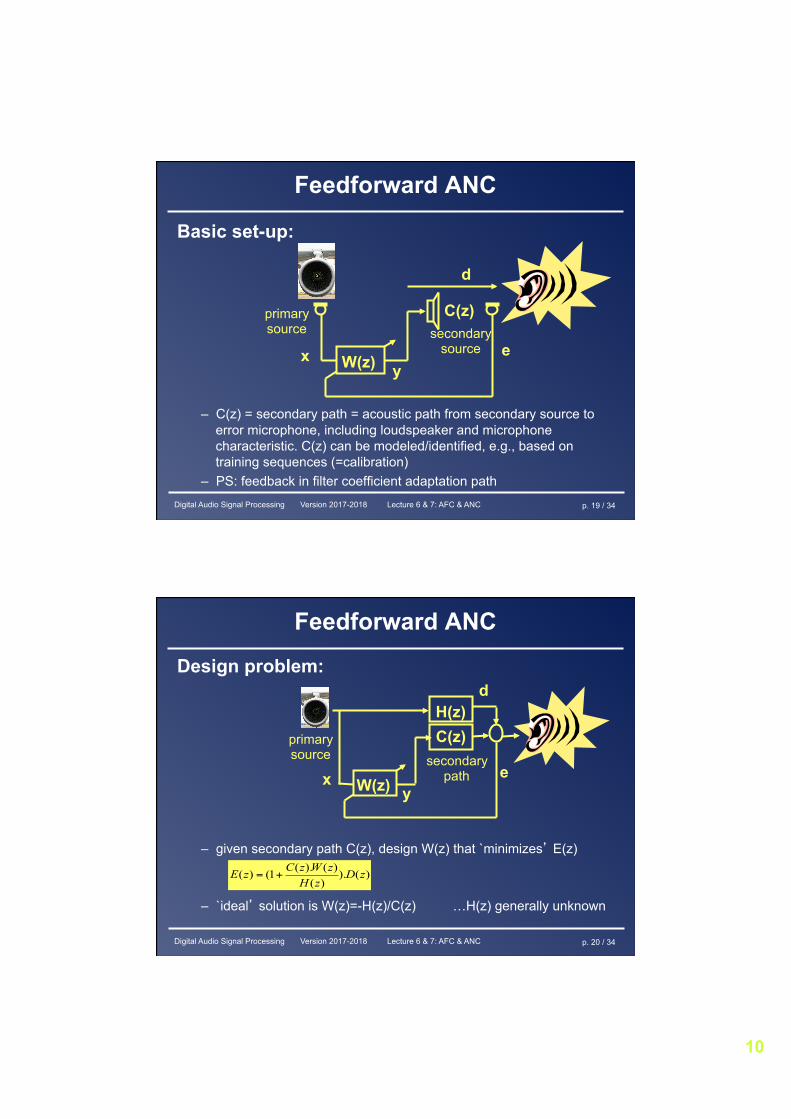
Feedforward ANC
Basic set-up:
– C(z) = secondary path = acoustic path from secondary source to error microphone, including loudspeaker and microphone characteristic. C(z) can be modeled/identified, e.g., based on training sequences (=calibration)
– PS: feedback in filter coefficient adaptation path
C(z)
d
e W(z) y
secondary source
primary source
x
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 20 / 34
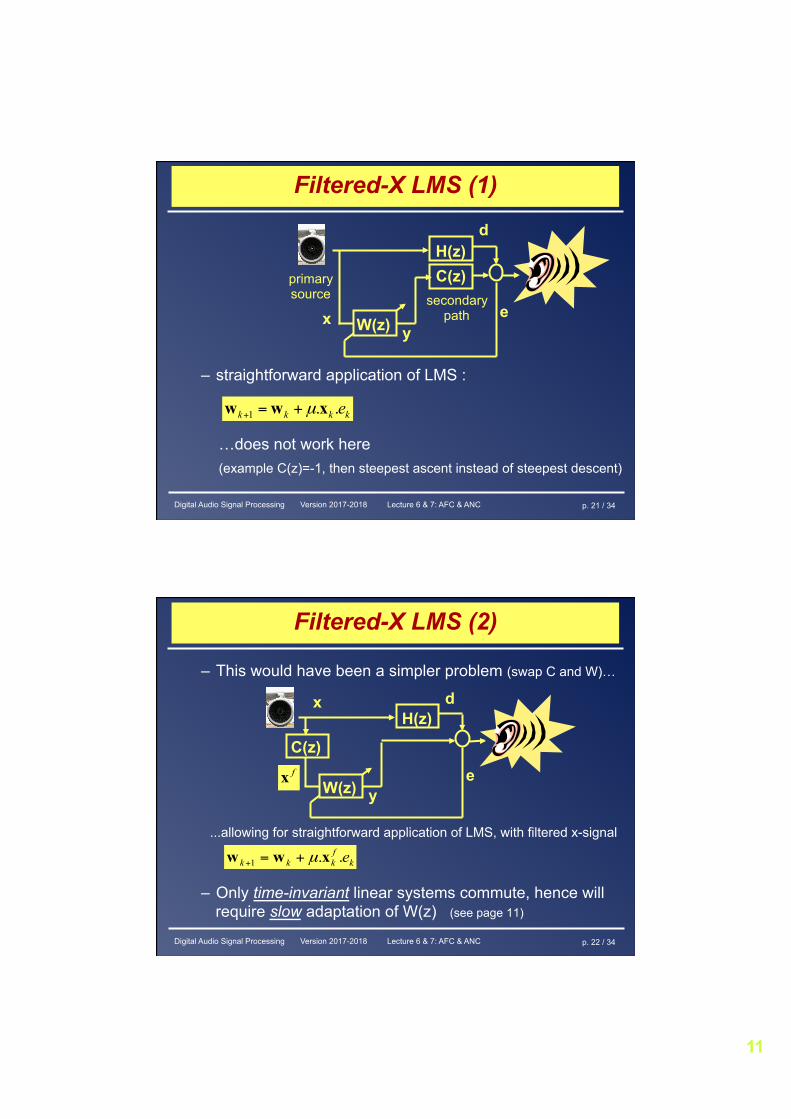
Feedforward ANC
Design problem:
– given secondary path C(z), design W(z) that `minimizes’ E(z)
– `ideal’ solution is W(z)=-H(z)/C(z) …H(z) generally unknown
C(z)
d
e W(z) y
secondary path
primary source
x
H(z)
)().)()().(1()( zD
zHzWzCzE +=
11
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 21 / 34
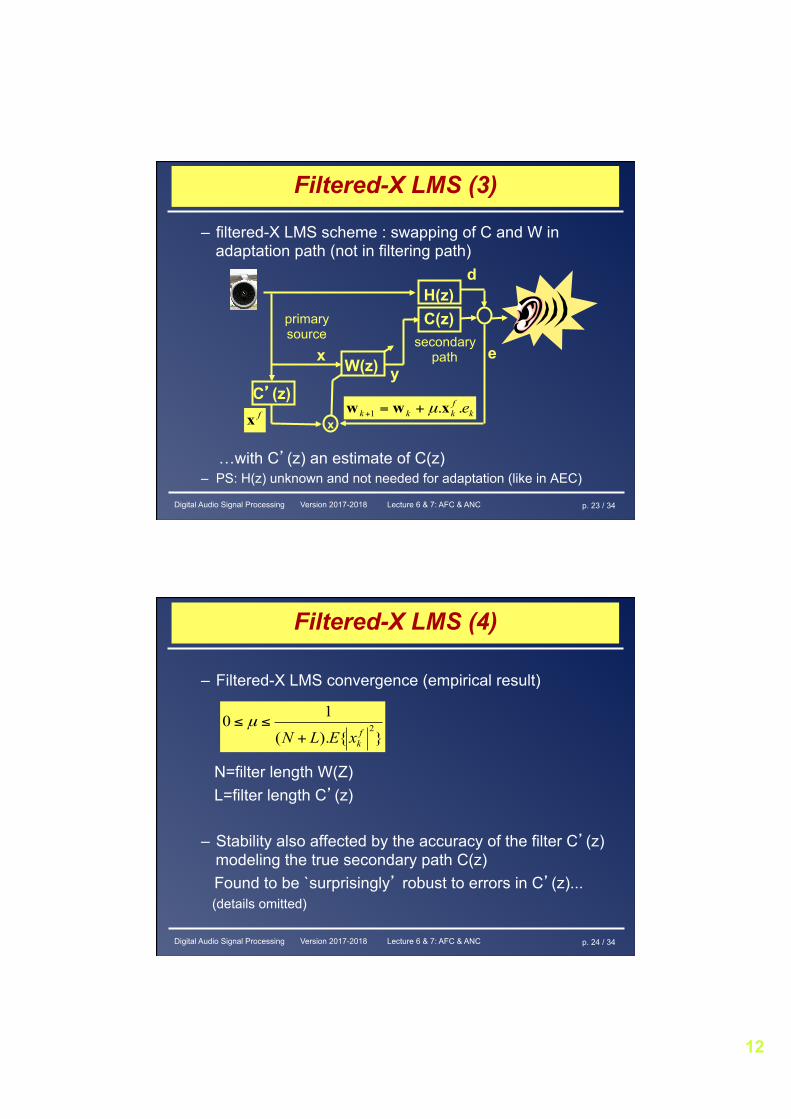
Filtered-X LMS (1)
– straightforward application of LMS :
…does not work here (example C(z)=-1, then steepest ascent instead of steepest descent)
C(z)
d
e W(z) y
secondary path
primary source
x
H(z)
kkkk e..1 xww µ+=+
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 22 / 34
– This would have been a simpler problem (swap C and W)…
...allowing for straightforward application of LMS, with filtered x-signal
– Only time-invariant linear systems commute, hence will require slow adaptation of W(z) (see page 11)
kfkkk e..1 xww µ+=+
C(z)
d
e W(z) y
H(z) x
fx
Filtered-X LMS (2)
12
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 23 / 34
– filtered-X LMS scheme : swapping of C and W in adaptation path (not in filtering path)
…with C’(z) an estimate of C(z) – PS: H(z) unknown and not needed for adaptation (like in AEC)
C(z)
d
e W(z) y
secondary path
primary source
x
H(z)
C’(z)
x fx kfkkk e..1 xww µ+=+
Filtered-X LMS (3)
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 24 / 34
– Filtered-X LMS convergence (empirical result)
N=filter length W(Z) L=filter length C’(z) – Stability also affected by the accuracy of the filter C’(z)
modeling the true secondary path C(z) Found to be `surprisingly’ robust to errors in C’(z)... (details omitted)
}{).(
10 2fkxELN +
≤≤ µ
Filtered-X LMS (4)
13
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 25 / 34
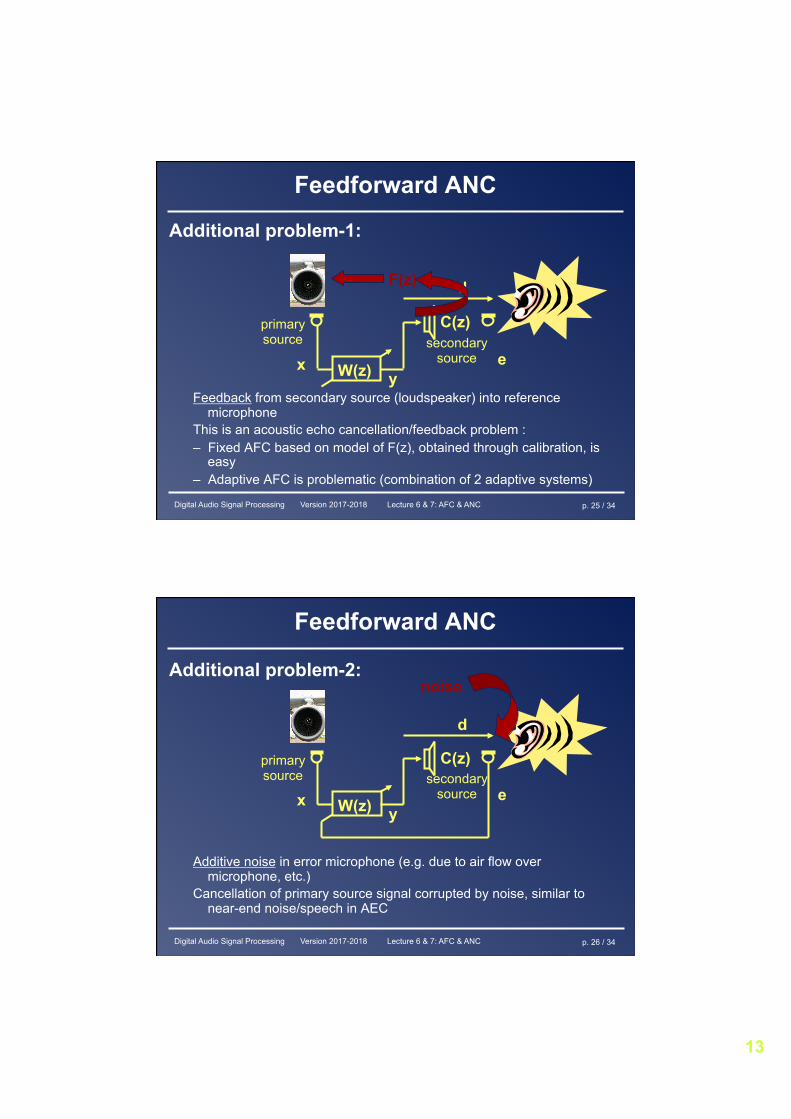
Feedforward ANC
Additional problem-1:
Feedback from secondary source (loudspeaker) into reference microphone
This is an acoustic echo cancellation/feedback problem : – Fixed AFC based on model of F(z), obtained through calibration, is
easy – Adaptive AFC is problematic (combination of 2 adaptive systems)
C(z)
d
e W(z) y
secondary source
primary source
x
F(z)
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 26 / 34
Feedforward ANC
Additional problem-2:
Additive noise in error microphone (e.g. due to air flow over microphone, etc.)
Cancellation of primary source signal corrupted by noise, similar to near-end noise/speech in AEC
C(z)
d
e W(z) y
secondary source
primary source
x
noise
14
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 27 / 34
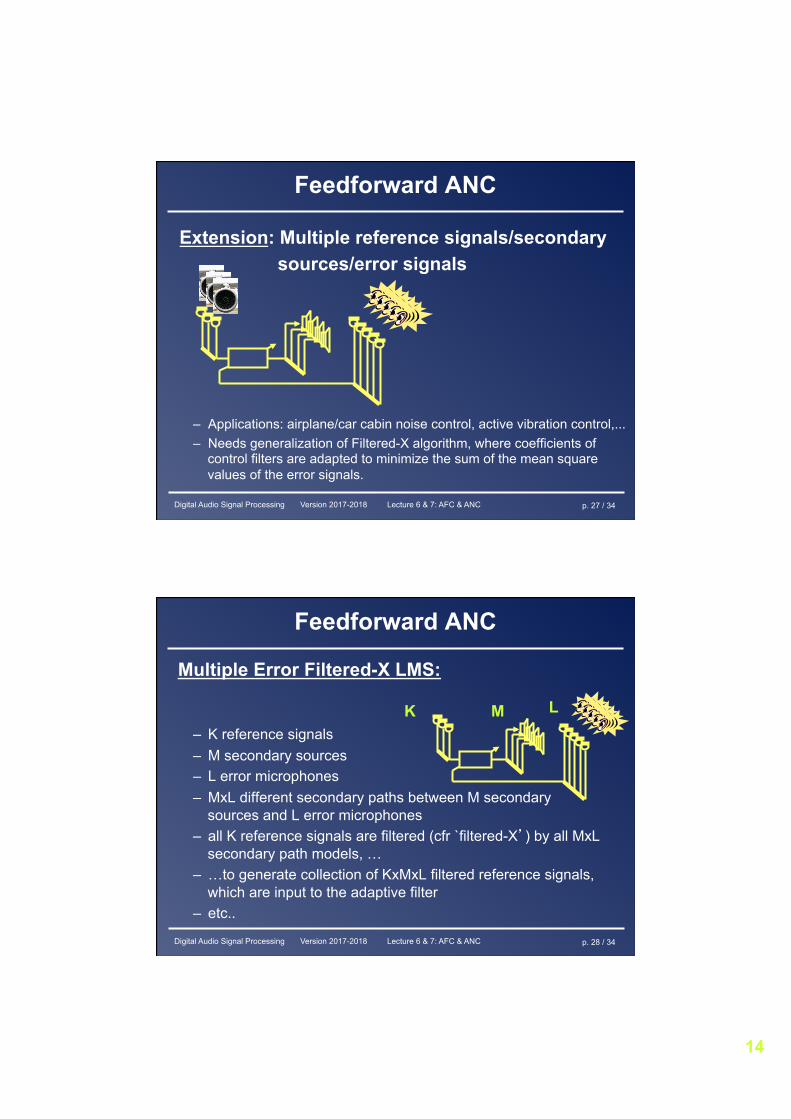
Feedforward ANC
Extension: Multiple reference signals/secondary sources/error signals
– Applications: airplane/car cabin noise control, active vibration control,... – Needs generalization of Filtered-X algorithm, where coefficients of
control filters are adapted to minimize the sum of the mean square values of the error signals.
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 28 / 34
Feedforward ANC
Multiple Error Filtered-X LMS:
– K reference signals – M secondary sources – L error microphones – MxL different secondary paths between M secondary
sources and L error microphones – all K reference signals are filtered (cfr `filtered-X’) by all MxL
secondary path models, … – …to generate collection of KxMxL filtered reference signals,
which are input to the adaptive filter – etc..
K M L
15
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 29 / 34
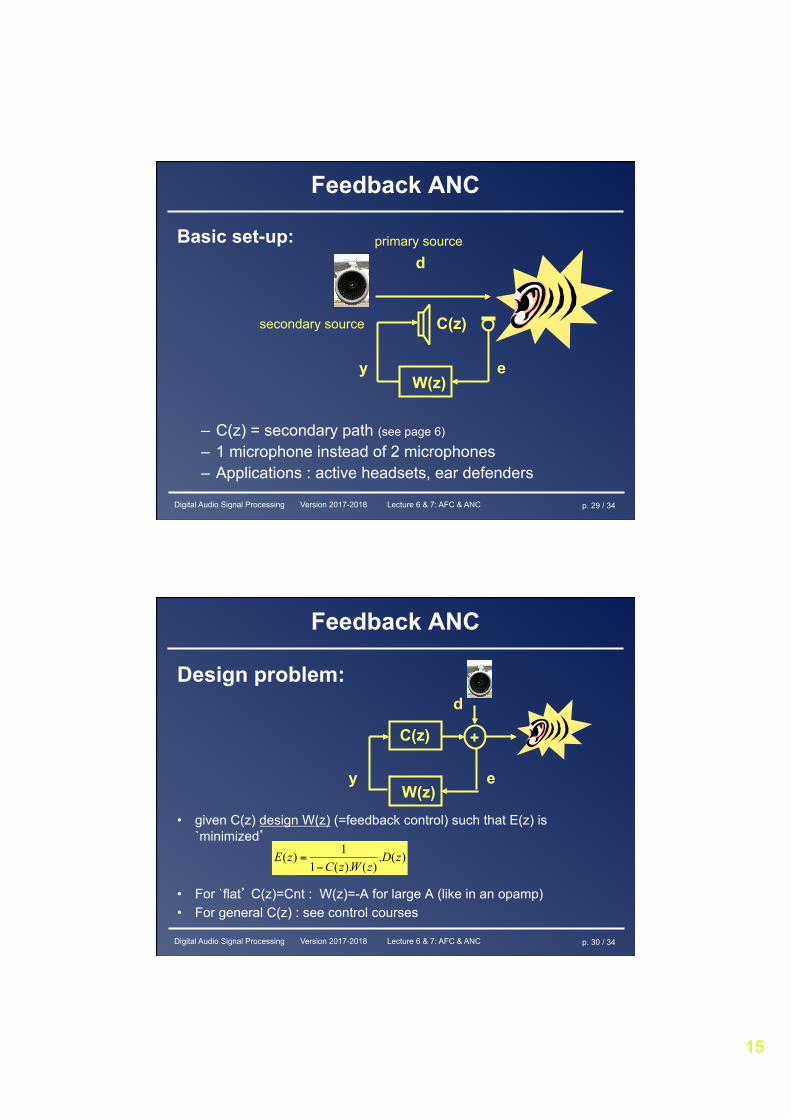
Feedback ANC
Basic set-up:
– C(z) = secondary path (see page 6) – 1 microphone instead of 2 microphones – Applications : active headsets, ear defenders
W(z)
C(z)
primary source d
e y
secondary source
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 30 / 34
Feedback ANC
Design problem:
• given C(z) design W(z) (=feedback control) such that E(z) is `minimized’
• For `flat’ C(z)=Cnt : W(z)=-A for large A (like in an opamp) • For general C(z) : see control courses
W(z)
C(z)
d
e y
+
)(.)().(1
1)( zDzWzC
zE−
=

16
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 31 / 34
Feedback ANC An interesting feedback controller is formed as follows :
…with C’(z) is an estimate of C(z) and W’(z) yet to be defined. Note that if C’(z)=C(z), then W’(z) is fed by d (!), i.e. …
d
e
+
W’(z)
C(z)
y
-C’(z)
+ )(').('1)(')(zWzC
zWzW+
=
)(.)(')}.()('{1
)(')('1)( zDzWzCzC
zWzCzE−+
+=
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 32 / 34
Feedback ANC
Note that if C’(z)=C(z), then W’(z) is fed by d (!), i.e. …
…which means the feedback system has been transformed into a feedforward system, similar to page 12..
d
e +
W’(z)
C(z)
y d
)(.1
)(')(1)( zDzWzCzE +=
17
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 33 / 34
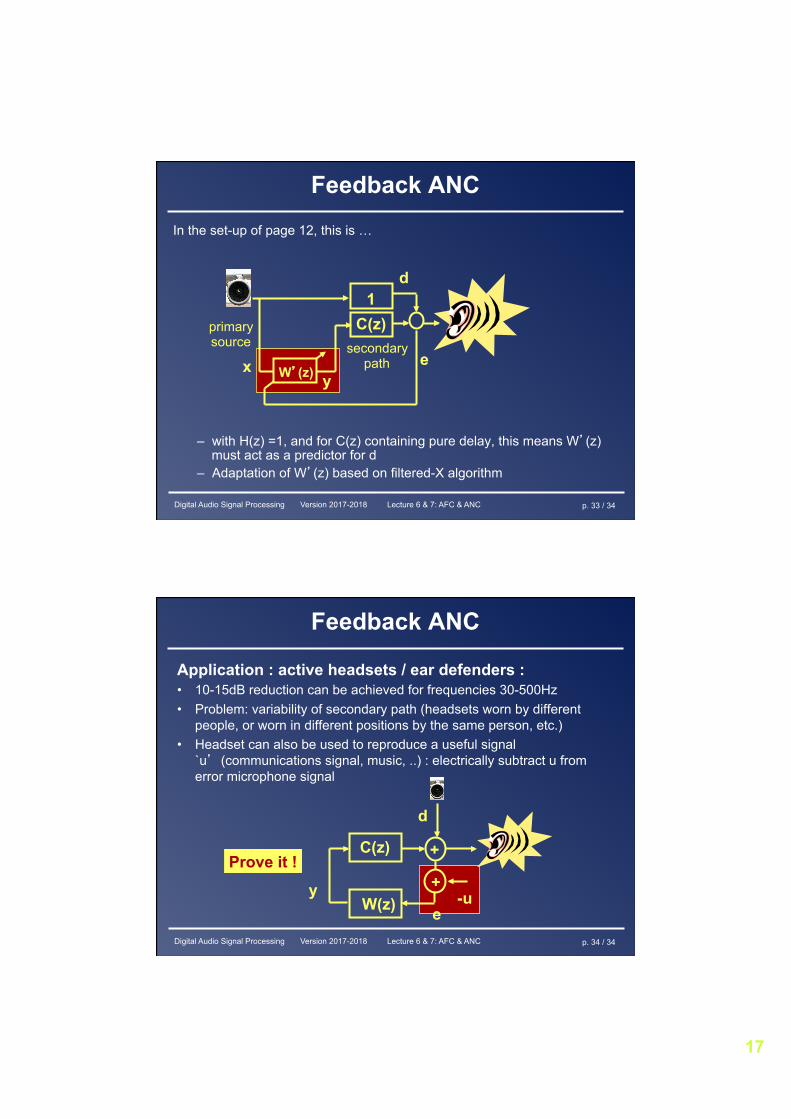
Feedback ANC
In the set-up of page 12, this is …
– with H(z) =1, and for C(z) containing pure delay, this means W’(z) must act as a predictor for d
– Adaptation of W’(z) based on filtered-X algorithm
C(z)
d
e W’(z) y
secondary path
primary source
x
1
Digital Audio Signal Processing Version 2017-2018 Lecture 6 & 7: AFC & ANC p. 34 / 34
Feedback ANC
Application : active headsets / ear defenders : • 10-15dB reduction can be achieved for frequencies 30-500Hz • Problem: variability of secondary path (headsets worn by different
people, or worn in different positions by the same person, etc.) • Headset can also be used to reproduce a useful signal
`u’ (communications signal, music, ..) : electrically subtract u from error microphone signal
W(z)
C(z)
d
e y
+
+ -u
Prove it !
Related Documents











