Lecture 3: Stochastic Differential Equations David Nualart Department of Mathematics Kansas University Gene Golub SIAM Summer School 2016 Drexel University David Nualart (Kansas University) July 2016 1 / 54

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Lecture 3: Stochastic Differential Equations
David Nualart
Department of MathematicsKansas University
Gene Golub SIAM Summer School 2016Drexel University
David Nualart (Kansas University) July 2016 1 / 54

Strong solutions
Let B = Bjt , t ≥ 0, j = 1, . . . ,d be a d-dimensional Brownian motion
and ξ an m-dimensional random vector independent of B.
Let Ft be the σ-field generated by Bs,0 ≤ s ≤ t , ξ and the null sets.
Consider measurable coefficients bi (t , x) and σij (t , x), 1 ≤ i ≤ m,1 ≤ j ≤ d from [0,∞)× Rm to R.
Our aim to give a meaning to the stochastic differential equation on Rm :
dX it = bi (t ,Xt )dt +
d∑j=1
σij (t ,Xt )dBjt , 1 ≤ i ≤ m (1)
with initial condition X0 = ξ.
David Nualart (Kansas University) July 2016 2 / 54

DefinitionWe say that an adapted and continuous process X = Xt , t ≥ 0 is a solutionto equation (1) if for all t ≥ 0,
Xt = ξ +
∫ t
0b(s,Xs)ds +
∫ t
0σ(s,Xs)dBs, a.s.
or
X it = ξi +
∫ t
0bi (s,Xs)ds +
d∑j=1
∫ t
0σij (s,Xs)dBj
s, 1 ≤ i ≤ m, a.s.
b is called the drift and σ is called the diffusion coefficient.
David Nualart (Kansas University) July 2016 3 / 54

TheoremSuppose that the coefficients are locally Lipschitz in the space variable, thatis, for each N ≥ 1, there exists KN > 0 such that for each ‖x‖, ‖y‖ ≤ N andt ≥ 0
‖b(t , x)− b(t , y)‖+ ‖σ(t , x)− σ(t , y)‖ ≤ KN‖x − y‖.
Then, two solutions with the same initial condition coincide almost surely(strong uniqueness holds).
In the absence of the locally Lipschitz condition equation (1) might fail tobe solvable or have multiple solutions.
Example : Xt =∫ t
0 |Xs|αds, where α ∈ (0,1). Then Xt = 0 is a solutionand also, for any s ≥ 0,
Xt =
(t − sβ
)β1[s,∞)(t), β = 1/(1− α),
is also a solution.
David Nualart (Kansas University) July 2016 4 / 54

Lemma (Gronwall lemma)Let u be a nonnegative continuous function on [0,∞) such that
u(t) ≤ α(t) +
∫ t
0β(s)u(s)ds, t ≥ 0
with β ≥ 0 and α non-decreasing. Then,
u(t) ≤ α(t) exp
(∫ t
0β(s)ds
), t ≥ 0.
In particular, if α and β are constant, we get
u(t) ≤ αeβt .
David Nualart (Kansas University) July 2016 5 / 54

Proof :
Let X and X two solutions. Define
Sn = inft ≥ 0 : ‖Xt‖ ≥ n or ‖Xt‖ ≥ n.
Clearly Sn are stopping times such that Sn ↑ ∞.
Then,
E‖Xt∧Sn − Xt∧Sn‖2 ≤ 2E
[∫ t∧Sn
0‖b(u,Xu)− b(u, Xu‖du
]2
+2Em∑
i=1
∣∣∣∣∣∣d∑
j=1
∫ t∧Sn
0(σij (u,Xu)− σij (u, Xu))dBj
u
∣∣∣∣∣∣2
≤ 2tE∫ t∧Sn
0‖b(u,Xu)− b(u, Xu‖2du
+2E∫ t∧Sn
0‖σ(u,Xu)− σ(u, Xu‖2du.
David Nualart (Kansas University) July 2016 6 / 54

Using the local Lipschitz property, we obtain for any t ≥ 0,
E‖Xt∧Sn − Xt∧Sn‖2 ≤ 2(t + 1)K 2
n
∫ t
0E‖Xu∧Sn − Xu∧Sn‖
2du.
Then g(t) = E‖Xt∧Sn − Xt∧Sn‖2 satisfies
g(t) ≤ 2(t + 1)K 2n
∫ t
0g(u)du,
which, by Gronwall’s lemma, implies that g = 0.
Letting n→∞ we conclude that Xt = Xt .
David Nualart (Kansas University) July 2016 7 / 54

A local Lipschitz condition is not sufficient to guarantee global existenceof a solution.Example :
Xt = 1 +
∫ t
0X 2
s ds.
the solution is Xt = 11−t , which explodes as t ↑ 1.
David Nualart (Kansas University) July 2016 8 / 54

Exercise : Given x ∈ Rm, we can find a strictly positive stopping time τand a stochastic process Xt , t < τ such that
Xt = x +
∫ t
0b(s,Xs)ds +
∫ t
0σ(s,Xs)dBs, t < τ.
The process Xt , t < τ is unique in the sense that if ρ is another strictlypositive stopping time and Yt , t < ρ satisfies
Yt = x +
∫ t
0b(s,Ys)ds +
∫ t
0σ(s,Ys)dBs, t < ρ,
then ρ ≤ τ and for every t ≥ 0, Yt1t<ρ = Xt1t<ρ.
David Nualart (Kansas University) July 2016 9 / 54

TheoremSuppose that the coefficients b and σ satisfy the global Lipschitz and lineargrowth conditions :
‖b(t , x)− b(t , y)‖+ ‖σ(t , x)− σ(t , y)‖ ≤ K (‖x − y‖,‖b(t , x)‖2 + ‖σ(t , x)‖2 ≤ K 2(1 + ‖x‖2),
for every x , y ∈ Rm, t ≥ 0. Suppose also that
E‖ξ‖2 <∞.
Then, there exist a unique solution such that for any T > 0
E
(sup
0≤t≤T‖Xt‖2
)≤ CT ,K (1 + E‖ξ‖2),
where CT ,K depends on T and K .
David Nualart (Kansas University) July 2016 10 / 54

Proof :
(i) Define the Picard iterations by putting X (0)t = ξ and for k ≥ 0,
X (k+1)t = ξ +
∫ t
0b(s,X (k)
s )ds +
∫ t
0σ(s,X (k)
s )dBs.
It is easy to check that
E
(sup
0≤t≤T‖X (1)
t ‖2
)≤ CT ,K (1 + E‖ξ‖2).
Then X (k+1)t − X (k)
t = Vt + Mt , where
Vt =
∫ t
0[b(s,X (k)
s )− b(s,X (k−1)s )]ds
and
Mt =
∫ t
0[σ(s,X (k)
s )− σ(s,X (k−1)s )]dBs.
David Nualart (Kansas University) July 2016 11 / 54

(ii) By the maximal inequality for square integrable martingales,
E
[sup
0≤t≤T‖Mt‖2
]≤ 4E
∫ T
0‖σ(s,X (k)
s )− σ(s,X (k−1)s )‖2ds
≤ 4K 2∫ T
0E‖X (k)
s − X (k−1)s ‖2ds.
On the other hand,
E
[sup
0≤t≤T‖Vt‖2
]≤ K 2T
∫ T
0E‖X (k)
s − X (k−1)s ‖2ds,
which leads to
E
[sup
0≤t≤T‖X (k+1)
t − X (k)t ‖
2
]≤ L
∫ T
0E‖X (k)
s − X (k−1)s ‖2ds,
where L = 2K 2(4 + T ).
David Nualart (Kansas University) July 2016 12 / 54

(iii) By iteration,
E
[sup
0≤t≤T‖X (k+1)
t − X (k)t ‖
2
]≤ C∗
(LT )k
k !,
where C∗ = E[max0≤t≤T ‖X (1) − ξ‖2
]<∞. Consider the Banach space
ET of continuous adapted processes X = Xt , t ∈ [0,T ] such that
‖X‖ET :=
(E
(sup
0≤t≤T‖Xt‖2
)) 12
<∞.
Then the sequence X (k) converges in ET to a limit X which satisfies theequation.
David Nualart (Kansas University) July 2016 13 / 54

Under the assumptions of the theorem, if E‖ξ‖p <∞ for some p ≥ 2,then the solution satisfies the following moments estimate,
E
[sup
t∈[0,T ]
‖Xt‖p
]≤ CT ,K ,p(1 + E [‖ξ‖p]),
where C depends on K , T and p.The proof uses Burkholder-David-Gundy inequality.
David Nualart (Kansas University) July 2016 14 / 54

Linear stochastic differential equations
The geometric Brownian motion
Xt = ξe(µ−σ2
2
)t+σBt
solves the linear SDE
dXt = µXtdt + σXtdBt .
More generally, the solution of the homogeneous linear SDE
dXt = b(t)Xtdt + σ(t)XtdBt ,
where b(t) and σ(t) are continuous functions, is
Xt = ξ exp[∫ t
0
(b(s)− 1
2σ2(s)
)ds +
∫ t0 σ(s)dBs
].
David Nualart (Kansas University) July 2016 15 / 54

Ornstein-Uhlenbeck process
Consider the SDE (Langevin equation)
dXt = a (µ− Xt ) dt + σdBt
with initial condition X0 = x , where a, σ > 0 and µ is a real number.
The process Yt = Xteat , satisfies
dYt = aXteatdt + eatdXt = aµeatdt + σeatdBt .
Thus,
Yt = x + µ(eat − 1) + σ
∫ t
0easdBs,
which implies
Xt = µ+ (x − µ)e−at + σe−at∫ t
0 easdBs.
David Nualart (Kansas University) July 2016 16 / 54
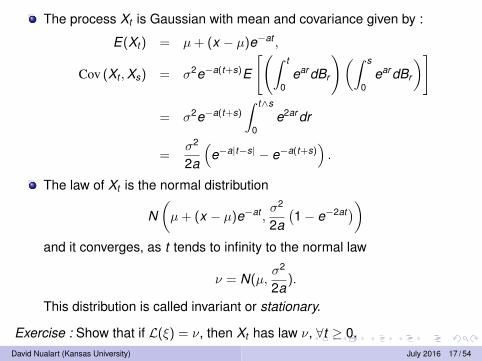
The process Xt is Gaussian with mean and covariance given by :
E(Xt ) = µ+ (x − µ)e−at ,
Cov (Xt ,Xs) = σ2e−a(t+s)E
[(∫ t
0ear dBr
)(∫ s
0ear dBr
)]
= σ2e−a(t+s)∫ t∧s
0e2ar dr
=σ2
2a
(e−a|t−s| − e−a(t+s)
).
The law of Xt is the normal distribution
N(µ+ (x − µ)e−at ,
σ2
2a(1− e−2at))
and it converges, as t tends to infinity to the normal law
ν = N(µ,σ2
2a).
This distribution is called invariant or stationary.
Exercise : Show that if L(ξ) = ν, then Xt has law ν, ∀t ≥ 0.David Nualart (Kansas University) July 2016 17 / 54

General linear SDEs
Consider the equation
dXt = (a(t) + b(t)Xt ) dt + (c(t) + d(t)Xt ) dBt ,
with initial condition ξ = x , where a, b, c and d are continuous functions.The solution to this equation is given by
Xt = Ut
(x +
∫ t
0[a(s)− c(s)d(s)] U−1
s ds +
∫ t
0c(s) U−1
s dBs
),
where
Ut = exp
(∫ t
0b(s)ds +
∫ t
0d(s)dBs −
12
∫ t
0d2(s)ds
).
Proof : Write Xt = UtVt , where dVt = α(t)dt + β(t)dBt , and find α and β.
David Nualart (Kansas University) July 2016 18 / 54

Stochastic flows
Suppose that the coefficients are globally Lipschitz with lineargrowth.Denote by X x
t the solution with initial condition x ∈ Rm.
PropositionLet T > 0. For every p ≥ 2, there exists a constant Cp,T such that for each0 ≤ s ≤ t ≤ T and x , y ∈ Rm,
E(‖X x
t − X ys ‖p) ≤ Cp,T (‖x − y‖p + |t − s|p/2).
As a consequence, there exists a version X xt , t ≥ 0, x ∈ Rm of the process
X xt , t ≥ 0, x ∈ Rm which is continuous in (t , x) ∈ [0,∞)× Rm.
The continuous process of continuous maps Ψt : x → X xt is called the
stochastic flow associated to equation (1).
David Nualart (Kansas University) July 2016 19 / 54

Denote by X t,xs , s ≥ t the solution to equation (1) starting at time t with
initial condition x :
X t,xs = x +
∫ s
tb(θ,X t,x
θ )dθ +
∫ s
tσ(θ,X t,x
θ )dBθ, s ≥ t .
One can also snow that there is a version of the processX t,x
s , s ≥ t ≥ 0, x ∈ Rm which is continuous in all its variables.
Proposition (Flow property)If s ≥ t ,
X 0,xs = X t,X 0,x
ts , a.s.
David Nualart (Kansas University) July 2016 20 / 54

Proof :
Almost surely, for any y ∈ Rm,
X t,ys = y +
∫ s
tb(θ,X t,y
θ )dθ +
∫ s
tσ(θ,X t,y
θ )dBθ.
Substituting y by X 0,xt yields
X t,X 0,xt
s = X 0,xt +
∫ s
tb(θ,X t,X 0,x
tθ )dθ +
∫ s
tσ(θ,X t,X 0,x
tθ )dBθ.
On the other hand, X 0,xs is also a solution to this equation for s ≥ t
because
X 0,xs = X 0,x
t +
∫ s
tb(θ,X 0,x
θ )dθ +
∫ s
tσ(θ,X 0,x
θ )dBθ.
Then, the uniqueness of the solution implies the result.
David Nualart (Kansas University) July 2016 21 / 54

Markov property
TheoremThe solution Xt is a Markov process with respect to the Brownian filtration Ft .Furthermore, for any f ∈ Cb(Rm) and t ≥ s, we have
E [f (Xt )|Fs] = (Ps,t f )(Xs),
where Ps,t f (x) = E [f (X s,xt )].
If the coefficients are time independent, Ps,t can be written as Pt−s,where Pt , t ≥ 0 is the semigroup of operators with infinitesimalgenerator
L =12
m∑i,k=1
aik∂2f
∂xi∂xk+
m∑i=1
bi∂f∂xi
,
where aik =∑d
j=1 σijσkj .
David Nualart (Kansas University) July 2016 22 / 54

Sketch of the proof :
(i) X s,xt is a measurable function of x and the Brownian incrementsBs+u − Bs,u ≥ 0, that is
X s,xt = Φ(x ,Bs+u − Bs,u ≥ 0).
(ii) This implies, by the flow property, that
X 0,xt = Φ(X 0,x
s ,Bs+u − Bs,u ≥ 0),
where X 0,xs is Fs-measurable and Bs+u − Bs,u ≥ 0 is independent of
Fs.
(iii) Therefore,
E [f (Φ(X 0,xs ,Bs+u − Bs,u ≥ 0))|Fs] = E [f (Φ(y ,Bs+u − Bs,u ≥ 0))]|y=X 0,x
s,
which yields the result.
David Nualart (Kansas University) July 2016 23 / 54

Numerical approximations
Euler’s scheme :
Fix T > 0 and set ti = iTn , = 0,1, . . . ,n. The Euler’s method consists in
the recursive scheme :
X (n)(ti ) = X (n)(ti−1) + b(ti−1,X (n)(ti−1))Tn
+ σ(ti−1,X (n)(ti−1))∆Bi ,
i = 1, . . . ,n, where ∆Bi = Bti − Bti−1 .
The initial value is X (n)0 = x0.
Inside the interval (ti−1, ti ) the value of the process X (n)t is given by linear
interpolation, or by the equation
X (n)t = x0 +
∫ t
0b(κn(s),Xκn(s)) +
∫ t
0σ(κn(s),Xκn(s))dBs,
where κn(s) = ti−1 if s ∈ [ti−1, ti ).
David Nualart (Kansas University) July 2016 24 / 54

Proposition
The error of the Euler’s method is of order n−12 :√
E[(
XT − X (n)T
)2]≤ C
√Tn.
In order to simulate a trajectory of the solution using Euler’s method, itsuffices to simulate the values of n independent random variables
ξ1, . . . , ξn with distribution N(0,1), and replace ∆Bi by√
Tn ξi .
David Nualart (Kansas University) July 2016 25 / 54

Milstein scheme :
Euler’s method can be improved by adding a correction term. To simplifywe assume m = d = 1 and that the coefficients are time independent.We can write
X (ti ) = X (ti−1) +
∫ ti
ti−1
b(Xs)ds +
∫ ti
ti−1
σ(Xs)dBs. (2)
Euler’s method is based on the approximations∫ ti
ti−1
b(Xs)ds ≈ b(X (ti−1))Tn,∫ ti
ti−1
σ(Xs)dBs ≈ σ(X (ti−1))∆Bi .
David Nualart (Kansas University) July 2016 26 / 54

Applying Ito’s formula to the processes b(Xs) and σ(Xs), we obtain
X (ti )− X (ti−1)
=
∫ ti
ti−1
[b(X (ti−1)) +
∫ s
ti−1
(bb′ +
12
b′′σ2)
(Xr )dr
+
∫ s
ti−1
(σb′) (Xr )dBr
]ds
+
∫ ti
ti−1
[σ(X (ti−1)) +
∫ s
ti−1
(bσ′ +
12σ′′σ2
)(Xr )dr
+
∫ s
ti−1
(σσ′) (Xr )dBr
]dBs
= b(X (ti−1))Tn
+ σ(X (ti−1))∆Bi +
∫ ti
ti−1
(∫ s
ti−1
(σσ′) (Xr )dBr
)dBs + Ri,n,
where the term Ri,n is of lower order.
David Nualart (Kansas University) July 2016 27 / 54

This double stochastic integral can also be approximated by
(σσ′) (X (ti−1))
∫ ti
ti−1
(∫ s
ti−1
dBr
)dBs.
The rules of Ito stochastic calculus lead to∫ ti
ti−1
(∫ s
ti−1
dBr
)dBs =
∫ ti
ti−1
(Bs − Bti−1
)dBs
=12
(B2
ti − B2ti−1
)− Bti−1
(Bti − Bti−1
)− T
2n
=12
[(∆Bi )
2 − Tn
].
David Nualart (Kansas University) July 2016 28 / 54

The Milstein’s method consists in the recursive scheme :
X (n)(ti ) = X (n)(ti−1) + b(X (n)(ti−1))Tn
+ σ(X (n)(ti−1)) ∆Bi
+12
(σσ′) (X (n)(ti−1))
[(∆Bi )
2 − Tn
].
One can show that the error is of order Tn , that is,√
E[(
XT − X (n)T
)2]≤ C
Tn.
David Nualart (Kansas University) July 2016 29 / 54

Proposition (Yamada-Watanabe ’71)Consider the 1-dimensional SDE
dXt = b(t ,Xt ) + σ(t ,Xt )dBt ,
where the coefficients have linear growth and satisfy
|b(t , x)− b(t , y)| ≤ K |x − y ||σ(t , x)− σ(t , y)| ≤ h(|x − y |),
with h : [0,∞)→ [0,∞) is strictly increasing, h(0) = 0 and∫ ε
0h−2(x)dx =∞, ∀ε > 0.
Then strong uniqueness holds.
Example : σ(x) = |x |α with α ≥ 12 (Girsanov ’62).
David Nualart (Kansas University) July 2016 30 / 54

Proof in the case b = 0, σ(x) = |x |α, α ∈ ( 12 ,1] :
Let X and X be two solutions with the same initial condition. ThenY = X − X satisfies
Yt =
∫ t
0
[|Xs|α − |Xs|α
]dBs.
Applying Ito’s formula to ψn(x) such that ψ′′(x) = n1[− 1n ,
1n ]
(x), yields
E [ψn(Yt )] =n2
E
[∫ t
01[− 1
n ,1n ]
(Ys)[|Xs|α − |Xs|α
]2ds
].
which implies
E [ψn(Yt )] ≤ n2
E
[∫ t
01[− 1
n ,1n ]
(Ys)|Ys|2αds
]≤ t
2n1−2α → 0.
Therefore, E [|Yt |] = 0.
David Nualart (Kansas University) July 2016 31 / 54

Weak solutions
DefinitionA weak solution is a triple (X ,B), (Ω,F ,P) and Ft , such that :
(i) Ft is a filtration in a probability space (Ω,F ,P), right-continuous andcontaining all P-null sets.
(ii) Xt is a continuous m-dimensional adapted process and Bt is anFt -Brownian motion on Rd .
(iii) Equation (1) is satisfied.
The filtration Ft may not be the augmentation of the filtration generatedby B and the initial condition.
David Nualart (Kansas University) July 2016 32 / 54

Example :
Consider the SDE
Xt =
∫ t
0sgn(Xs)dBs
where sgn(x) = 1(0,∞)(x)− 1(−∞,0](t).
One can construct a weak solution by choosing a Brownian motion Xtand
Bs =
∫ t
0sgn(Xs)dXs.
In this case, strong uniqueness does not hold, but there is uniqueness inlaw of all weak solutions.
The filtration generated by Xt is strictly larger than the filtrationgenerated by Bt (which is the filtration generated by |Xt |).
David Nualart (Kansas University) July 2016 33 / 54

PropositionConsider the SDE
dXt = b(t ,Xt )dt + dBt , t ∈ [0,T ]
where Bt is a d-dimensional Brownian motion and b : [0,T ]× Rd → Rd
satisfies‖b(t , x)‖ ≤ K (1 + ‖x‖).
Then there is a weak solution for any initial distribution µ.
David Nualart (Kansas University) July 2016 34 / 54

Proof :
To simplify we assume that the initial condition is constant ξ = x .
By Girsanov theorem, if Xt is a Brownian motion starting from x , theprocess
Bt = Xt − x −∫ t
0b(s,Xs)ds
is a Brownian motion starting from zero under the probability Q such that
ZT =dQdP
= exp
d∑
j=1
∫ T
0bj (s,Xs)dX j
s −12
∫ T
0‖b(s,Xs)‖2ds
.
David Nualart (Kansas University) July 2016 35 / 54

For each t ≥ 0, consider the second-order differential operator
Lt f =12
m∑i,k=1
aik∂2f
∂xi∂xk+
m∑i=1
bi∂f∂xi
,
where aik =∑d
j=1 σijσkj .
PropositionLet (X ,B), (Ω,F ,P), Ft , be a weak solution to equation (1). Then, for anyf ∈ C1,2([0,∞)× Rm), the process
M ft = f (t ,Xt )− f (0,X0)−
∫ t
0
(∂f∂s
+ Lsf)
(s,Xs)ds
is a continuous local martingale, such that
〈M f ,Mg〉t =m∑
i,k=1
∫ t
0aik (s,Xs)
∂f∂xi
(s,Xs)∂g∂xi
(s,Xs)ds.
David Nualart (Kansas University) July 2016 36 / 54

Proof : Use Ito formula and the stopping times
Sn = inf
t ≥ 0, ‖Xt‖ ≥ n or
∫ t
0σ2
ij (s,Xs)ds ≥ n for some (i , j)
.
If f has compact support and the coefficients σij are bounded in thesupport of f , then M f
t is a square integrable martingale.
David Nualart (Kansas University) July 2016 37 / 54

Martingale problem
DefinitionA probability P on C([0,∞);Rm) under which
M ft = f (y(t))− f (y(0))−
∫ t
0(Lsf )(y(s))ds
is a continuous local martingale for every f ∈ C2(Rm) is called a solution tothe martingale problem associated with Lt .
The existence of solution to the martingale problem is equivalent to theexistence of a weak solution.
If the coefficients b and σ are bounded and continuous, then there exista solution to the martingale problem for any initial distribution µ such that∫Rm ‖x‖2mµ(dx) <∞ for some m > 1.
David Nualart (Kansas University) July 2016 38 / 54

Feynman -Kac formula
Fix T > 0. Consider functions f : Rm → R, k : [0,T ]× Rm → [0,∞) suchthat |f (x)| ≤ L(1 + ‖x‖2λ) for some λ ≥ 1.
TheoremLet v : [0,T ]× Rm → Rm of class C1,2, bounded by M(1 + ‖x‖2µ), whereµ ≥ 1, that satisfies the Cauchy problem
∂v∂t
+ Ltv = kv , (t , x) ∈ [0,∞)× Rm
with terminal condition v(T , x) = f (x), x ∈ Rm. Then v(t , x) admits thestochastic representation
v(t , x) = E t,x
[f (XT ) exp
−∫ T
tk(θ,Xθ)dθ
],
where we denote by E t,x the expectation of Xs starting at time t at the point x.
David Nualart (Kansas University) July 2016 39 / 54

Proof :
Applying Ito’s formula we obtain that the process
Ys = v(s,Xs) exp−∫ s
tk(θ,Xθ)dθ
is a continuous local martingale localized by the sequence of stoppingtimes Sn = infs ≥ t : ‖Xs‖ ≥ n.Therefore, v(t , x) = E [YT∧Sn ] and we obtain
v(t , x) = E t,x
[v(Sn,XSn ) exp
−∫ Sn
tk(θ,Xθ)dθ
1Sn≤T
]
+E t,x
[f (XT ) exp
−∫ T
tk(θ,Xθ)dθ
1Sn>T
].
We know that
E t,x
[sup
t≤s≤T‖Xs‖2n
]≤ C(1 + ‖x‖2n).
David Nualart (Kansas University) July 2016 40 / 54

By dominated convergence, the second term converges to
E t,x
[f (XT ) exp
−∫ T
tk(θ,Xθ)dθ
].
The first term can be estimated by
E t,x [|v(Sn,XSn )|1Sn≤T] ≤ M(1 + n2µ)P t,x (Sn ≤ T ).
and
P t,x (Sn ≤ T ) = P t,x
(sup
t≤s≤T‖Xs‖ ≥ n
)≤ n−2NE t,x
[sup
t≤s≤T‖Xs‖2N
]≤ Cn−2N(1 + ‖x‖2N),
and it suffices to choose N > µ to show that the second term tends tozero.
David Nualart (Kansas University) July 2016 41 / 54

The Malliavin calculus
Consider a d-dimensional Brownian motion B = Bt ,0 ≤ t ≤ T and letFt be its filtration augmented with the null sets.
An FT -measurable random variable F is said to be cylindrical if it can bewritten as
F = f (
∫ T
0h1
sdBs, . . . ,
∫ T
0hn
sdBs),
where hi ∈ L2([0,T ];Rd ) and f : Rn → R is a C∞ function such that f allits partial derivatives have polynomial growth.
The space S of cylindrical random variables is dense in Lp(Ω,FT ,P) forany p ≥ 1.
DefinitionThe Malliavin derivative of F ∈ S is the Rd -valued process given by
DtF =n∑
i=1
hit∂f∂xi
(
∫ T
0h1
sdBs, . . . ,
∫ T
0hn
sdBs).
David Nualart (Kansas University) July 2016 42 / 54
Proposition (Integration by parts formula)Let F ∈ S and let ut , t ∈ [0,T ] be an m-dimensional progressivelymeasurable process that satisfies Novikov condition. Then
E
(∫ T
0〈DsF ,us〉ds
)= E
(F∫ T
0usdBs
).
David Nualart (Kansas University) July 2016 43 / 54

Proof :
(i) Let F = f (∫ T
0 h1sdBs, . . . ,
∫ T0 hn
sdBs). Fix ε > 0 and write
Fε = f
(∫ T
0h1
sd(
Bs + ε
∫ s
0ur dr
), . . . ,
∫ T
0hn
sd(
Bs + ε
∫ s
0ur dr
)).
(ii) From Girsanov’s theorem, we have
E [Fε] = E
(exp
(ε
∫ T
0ur dBs −
ε2
2
∫ T
0u2
r dr
)F
),
which implies
limε→0
1ε
(E [Fε]− E [F ]) = E
(F∫ T
0usdBs
).
David Nualart (Kansas University) July 2016 44 / 54

(iii) On the other hand,
limε→0
1ε
(E [Fε]− E [F ])
= E
(∫ T
0
n∑i=1
∂f∂xi
(∫ T
0h1
sdBs, . . . ,
∫ T
0hn
sdBs
)〈hi
s,us〉ds
)
= E
(∫ T
0〈DsF ,us〉ds
).
David Nualart (Kansas University) July 2016 45 / 54

For any p ≥ 1 we denote by LpT the space of d-dimensional measurable
processes Xt , t ∈ [0,T ] such that
E
(∫ T
0‖Xt‖2dt
) p2 <∞.
PropositionThe operator D is closable from Lp(Ω,FT ,P) into Lp
T , for any p ≥ 1.
David Nualart (Kansas University) July 2016 46 / 54

Proof in the case p > 1 :
(i) Let Fn ∈ S, FnLp
→ 0 and such that DFnLp
T→ X . We claim that X = 0.
(ii) For any h ∈ L2([0,T ];Rd ) and G ∈ S, we have
limn→∞
E
(∫ T
0G〈DsFn,hs〉ds
)= E
(G∫ T
0〈Xs,hs〉ds
)and
E
(∫ T
0G〈DsFn,hs〉ds
)= E
(∫ T
0〈Ds(GFn),hs〉ds
)
−E
(∫ T
0Fn〈DsG,hs〉ds
)
= E
(Fn
[G∫ T
0hsdBs −
∫ T
0〈DsG,hs〉ds
])→ 0.
As a consequence, we obtain E(
G∫ T
0 〈Xs,hs〉ds)
= 0, which impliesX = 0.
David Nualart (Kansas University) July 2016 47 / 54

The domain of D, denoted by D1,p is the closure of S under the norm
‖F‖1,p =(
E(|F |p) + E(‖DF‖pL2([0,T ];Rd )
) 1p.
For p > 1 we can consider the adjoint operator δ of D. It is a denselydefined operator from Lp
T into Lp(Ω,FT ,P), characterized by the dualityrelation
E(Fδ(u)) = E
(F∫ T
0usdBs
), F ∈ D1,p.
The domain of δ in LpT contains the space of d-dimensional
progressively measurable processes u in LpT and
δ(u) =
∫ T
0usdBs.
David Nualart (Kansas University) July 2016 48 / 54

Clark-Ocone formiula
Proposition
Let F ∈ D1,2. Then,
F = E(F ) +
∫ T
0E(DtF |Ft )dBt .
David Nualart (Kansas University) July 2016 49 / 54

Proof :
Assume d = 1. For any v ∈ L2(P) we can write, using the dualityrelationship
E
(F∫ T
0vtdBt
)= E(Fδ(v)) = E
(∫ T
0DtFvtdt
)
=
∫ T
0E [E(DtF |Ft )vt ]dt .
If we assume that F = E(F ) +∫ T
0 utdBt , then by the Ito isometry
E
(F∫ T
0vtdBt
)=
∫ T
0E(utvt )dt .
Comparing these two expressions we deduce that
ut = E(DtF |Ft )
almost everywhere in Ω× [0,T ].
David Nualart (Kansas University) July 2016 50 / 54

If F ∈ S, the k th derivative of F is the k -parameter process with valuesin Rd×k given by
Dkt1,...,tk F = Dt1 · · ·Dtk F .
For any p ≥ 1 the operator Dk is closable on S. We denote by Dk,p theclosure of S with respect to the norm
‖F‖k,p =
E [|F |p] +k∑
j=1
E(‖DF‖pL2([0,T ]j ;Rd )
)
1p
.
SetD∞ = ∩p≥1 ∩k≥1 Dk,p.
David Nualart (Kansas University) July 2016 51 / 54

Existence and regularity of densities
Let F = (F 1, . . . ,F m) be such that F i ∈ D1,2 for i = 1, . . . ,m.
The Malliavin matrix of F is
γF = (〈DF i ,DF j〉L2([0,T ];Rd ))1≤i,j≤m.
Theorem (Criterion for absolute continuity)If det γF > 0 a.s., then the law of F is absolutely continuous with respect tothe Lebesgue measure on Rm.
Theorem (Criterion for smoothness of the density)If Fi ∈ D∞ and E [(det γF )−p] <∞ for all p ≥ 1, then the law of F possessesand infinitely differentiability density.
David Nualart (Kansas University) July 2016 52 / 54

Let F = Xt , where Xt , t ≥ 0 is the diffusion process on Rm
dXt = b(Xt )dt +d∑
k=1
σk (Xt )dBkt , X0 = x0.
TheoremIf the Lie algebra spanned by σ1, . . . , σd at x = x0 is Rm, whereσk =
∑mi=1 σik
∂∂xi
, then for any t > 0 (det γXt )−1 ∈ ∩p≥2Lp(Ω) and the density
pt (x) of Xt is C∞.
pt (x) satisfies the Fokker-Planck equation(− ∂
∂t+ L∗
)pt = 0,
where
L =12
m∑i,j=1
(σσT )ij∂2
∂xi∂xj+
m∑i=1
bi∂
∂xi.
Then, pt ∈ C∞ means that ∂∂t −L∗ is hypoelliptic (Hormander’s theorem).
David Nualart (Kansas University) July 2016 53 / 54

References :
1 F. Baudoin : Diffusion Processes and Stochastic Calculus. EMS,2010.
2 I. Karatzas and S. E. Shreve : Brownian Motion and StochasticCalculus. Springer, 1998.
3 D. Nualart : Lecture Notes on Stochastic Processes.4 D. Nualart : The Malliavin calculus and related topics. Springer,
2005.
David Nualart (Kansas University) July 2016 54 / 54
Related Documents











