Lecture 3 - Probability and Bayes’ rule DD2427 March 22, 2013

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Lecture 3 - Probability and Bayes’ rule
DD2427
March 22, 2013

When probabilities are used
Probabilities are used to describe two quantities
• Frequencies of outcomes in random experiments.
- The probability of a coin toss landing as tails is 12 . Then if the
coin is tossed n times and kn “tails” are observed, it is
expected kn
n →12 as n→∞.
- The probability of temperature being between 10 and 11 at
midday in Stockholm during March.
• Degree of belief in propositions not involving random variables.
- the probability that Mr S. was the murderer of Mrs S. given
the evidence.
- the probability that this image contains a car given a
calculated feature vector.

When probabilities are used
Probabilities are used to describe two quantities
• Frequencies of outcomes in random experiments.
- The probability of a coin toss landing as tails is 12 . Then if the
coin is tossed n times and kn “tails” are observed, it is
expected kn
n →12 as n→∞.
- The probability of temperature being between 10 and 11 at
midday in Stockholm during March.
• Degree of belief in propositions not involving random variables.
- the probability that Mr S. was the murderer of Mrs S. given
the evidence.
- the probability that this image contains a car given a
calculated feature vector.

Defining probability for discrete quantities
Define a probabilistic ensemble with a triple (x,AX ,PX), where
• x is the outcome of a random variable, X,
• x can have the possible values, AX = (a1, a2, . . . , aI) withprobabilities PX = (p1, p2, . . . , pI).
• That is PX(ai) = pi.
The following must be satisfied:
• pi ≥ 0 for i = 1, . . . , I
•∑
x∈AX PX(x) = 1.

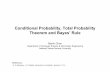
Discrete Random Variables
0.02 3 4 5 61
0.4
0.2
Face value of biased die
Pro
babi
lity
Rain
Drizzle
CloudSnow
Sleet
Sun
Wind
a) b)
0.02 3 4 5 61
0.4
0.2
Face value of biased die
Pro
babi
lity
Rain
Drizzle
CloudSnow
Sleet
Sun
Wind
a) b)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

A simple example
Let x be the outcome of throwing an unbiased die, then
AX = ‘1′, ‘2‘, ‘3‘, ‘4‘, ‘5‘, ‘6‘
PX =
1
6,1
6,1
6,1
6,1
6,1
6
Question:
PX(‘3‘) = ?
PX(‘5‘) = ?

Definitions of probability
Probability of a subset: If V ⊂ AX , then
PX(V ) = PX(x ∈ V ) =∑x∈V
PX(x)
Example:Going back to our die example, let V = ‘2‘, ‘3‘, ‘4‘, then
PX(V ) = PX(‘2‘) + PX(‘3‘) + PX(‘4‘)
=1
6+
1
6+
1
6=
1
2

The simple example
Throwing an unbiased die
AX = ‘1‘, ‘2‘, ‘3‘, ‘4‘, ‘5‘, ‘6‘
PX =
1
6,1
6,1
6,1
6,1
6,1
6
Question:
If V = ‘2‘, ‘3‘, what is PX(V )?

Continuous random variables
The outcome x of the random variable can also be continuous.
• In this case AX is an interval or union of intervals such asAX = (−∞,∞).
• Now pX(·) denotes the probability density function (pdf).
• It has the two properties:
1) pX(x) ≥ 0 ∀x ∈ AX ,
2)
∫x∈AX
pX(x) dx = 1.

Continuous Random Variable
0.010
2.0
1.0
Time taken to complete test (hours)
Pro
babi
dlity
den
sity
2
3.0
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Continuous Random Variable
a bx
p(x)
The probability that a continuous random variable x lies betweenvalues a and b (with b > a) is defined to be
PX(a < x ≤ b) =
∫ b
x=apX(x) dx

Definition of joint probability
Joint probability:
X × Y is an ensemble in which an outcome is an ordered pair(x, y) with x ∈ AX = a1, . . . , aI and y ∈ BY = b1, . . . , bJ.
Then PX,Y (x, y) is the joint probability of x and y.
Example:
Remember the outcome of throwing an unbiased die is describedwith
AX = ‘1‘, ‘2‘, ‘3‘, ‘4‘, ‘5‘, ‘6‘︸ ︷︷ ︸Possible outcomes
, PX = 6−1, 6−1, 6−1, 6−1, 6−1, 6−1︸ ︷︷ ︸Probability of each outcome

Definition of joint probability
Example ctd:
The output of two consecutive independent throws of an unbiased die:
Throw 1: AT1 = ‘1‘, ‘2‘, ‘3‘, ‘4‘, ‘5‘, ‘6‘PT1
= 6−1, 6−1, 6−1, 6−1, 6−1, 6−1
Throw 2: AT2= ‘1‘, ‘2‘, ‘3‘, ‘4‘, ‘5‘, ‘6‘
PT2 = 6−1, 6−1, 6−1, 6−1, 6−1, 6−1
Possible outcomes: AT1×T2 = (‘1‘, ‘1‘), (‘1‘, ‘2‘), (‘1‘, ‘3‘), . . . , (‘1‘, ‘6‘),
(‘2‘, ‘1‘), (‘2‘, ‘2‘), (‘2‘, ‘3‘), . . . , (‘2‘, ‘6‘),
. . . . . . . . . . . . . . . . . .(‘6‘, ‘1‘), (‘6‘, ‘2‘), (‘6‘, ‘3‘), . . . , (‘6‘, ‘6‘)
Probabilities: PT1×T2 =
136 ,
136 , · · · ,
136

Another example
Scenario:A person throws an unbiased die. If the outcome is even throwthis die again, otherwise throw a die biased towards ‘3‘ with
PX =
1
10,
1
10,1
2,
1
10,
1
10,
1
10
Questions:
What is the set, AT1×T2 , of possible outcomes?
What are the values in PT1×T2 ?

Joint Probabilitya) b) c)
d) e) f)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Joint Probability
a) b) c)
d) e) f)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Marginalization
Can recover probability distribution of any variable in a jointdistribution by integrating (or summing) over the other variables
PX(ai) ≡∑
y∈AY
PX,Y (ai, y)
PY (bj) ≡∑
x∈AX
PX,Y (x, bj)
a) b) c)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Marginalization
Can recover probability distribution of any variable in a jointdistribution by integrating (or summing) over the other variables
pX(x) =
∫pX,Y (x, y) dy
pY (y) =
∫pX,Y (x, y) dx
a) b) c)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Marginalization
Can recover probability distribution of any variable in a jointdistribution by integrating (or summing) over the other variables
pX(x) =∑y
PX,Y (x, y)
PY (y) =
∫xPX,Y (x, y) dx
a) b) c)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Example
Scenario:A person throws an unbiased die. If the outcome is even, throwthis die again, otherwise throw a die biased towards ‘3‘ with
PX =
1
10,
1
10,1
2,
1
10,
1
10,
1
10
Question:
Given PT1,T2(t1, t2) (ie PT1×T2) and the defintion of marginalprobability, calculate PT2(t) the probability of the output of thesecond die in this scenario.

Conditional Probability
• Conditional probability of X given Y = y1 is the relativepropensity of variable X to take different values given Y hasvalue y1.
• Written as PX|Y (x | y1).
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Conditional Probability
• Conditional probability is extracted from joint probability
• Extract appropriate slice and normalize
pX|Y (x | y∗) =pX,Y (x,y∗)∫pX,Y (x,y∗) dx
=pX,Y (x,y∗)pY (y∗)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Conditional Probability (Discrete)
PX|Y (x | y∗) = PX,Y (x,y∗)∑x∈AX
PX,Y (x,y∗)=
PX,Y (x,y∗)
PY (y∗)
Example:
Revisiting our example modelling the output of two consecutiveindependent throws of an unbiased die then
PT2|T1(‘3‘ | ‘1‘) =PT1,T2(‘1‘, ‘3‘)
PT1(‘1‘)=
13616
=1
6

Example
Scenario:
A person throws an unbiased die. If the outcome is even, throwthis die again, otherwise throw a die biased towards ‘3‘ with
PX =
1
10,
1
10,1
2,
1
10,
1
10,
1
10
Question:
Calculate PT2|T1(‘3‘ | ‘1‘) and PT2|T1(‘3‘ | ‘2‘).

Rules of probability
• Product Rule: from definition of the conditional probability
PX,Y (x, y) = PX|Y (x | y)PY (y) = PY |X(y | x)PX(x)
• Sum/Chain Rule: rewriting marginal probability definition
PX(x) =∑y
PX,Y (x, y) =∑y
PX|Y (x | y)PY (y)
• Bayes’ Rule: from the product rule
PY |X(y | x) =PX|Y (x | y)PY (y)
PX(x)=
PX|Y (x | y)PY (y)∑y′ PX|Y (x | y′)PY (y′)

An Example
Problem: Jo has the test for a nasty disease. Let A be the r.v.denoting the state of Jo’s health and B the test results.
A =
1 if Jo has the disease,
0 Jo does not have the diseaseB =
1 if the test is positive,
0 if the test is negative.
The test is 95% reliable, that is
PB|A(1 | 1) = .95 PB|A(1 | 0) = .05
PB|A(0 | 1) = .05 PB|A(0 | 0) = .95
The final piece of background information is that 1% of peopleJo’s age and background have the disease.
Jo has the test and the result is positive.
What is the probability Jo has the disease?

Solution
The background information tells us
PA(1) = .01, PA(0) = .99
Jo would like to know how plausible it is that she has the disease.
This involves calculating PA|B(1 | 1) which is the probability of Johaving the disease given a positive test result.
Applying Bayes’ Rule:
PA|B(1 | 1) =PB|A(1 | 1)PA(1)
PB(1)
=PB|A(1 | 1)PA(1)
PB|A(1 | 1)PA(1) + PB|A(1 | 0)PA(0)
=.95× .01
.95× .01 + .05× .99= .16

Your Turn
Scenario: Your friend has two envelopes. One he calls the Winenvelope which has 100 dollars and four beads ( 2 red and 2 blue)in it. While the other the Lose envelope has three beads ( 1 redand 2 blue) and no money. You choose one of the envelopes atrandom and then your friend offers to sell it to you.
Question:
• How much should you pay for the envelope?
• Suppose before deciding you are allowed to draw one beadfrom the envelope.
If this bead is blue how much should you pay?

Inference is important
• Inference is the term given to the conclusions reached fromthe basis of evidence and reasoning.
• Most of this course will be devoted to inference of some form.
• Some examples:
I’ve got this evidence. What’s the chance that this conclusionis true?
- I’ve got a sore neck: How likely am I to have meningitis?
- My car detector has fired in this image: How likely is itthere is a car in the image?

Use Bayes’ rule to perform inference
PY |X(y | x) =PX|Y (x | y)PY (y)∑y′ PX|Y (x | y′)PY (y′)
Terminology
• Posterior - PY |X(y | x):
What we know about Y after observing X = x.
• Likelihood - PX|Y (x | y):
Propensity for observing a certain value of X given a certain value
of Y = y
• Prior - PY (y):
What we know about Y before observing X = x
• Evidence -∑
y′ PX|Y (x | y′)PY (y′):
A constant to ensure that the left hand side is a valid probability
distribution

Bayesian classification
Bayes’ Rule says
PΩ|X(ω | x) =pX|Ω(x | ω)PΩ(ω)∑Kk=1 pX|Ω(x | k)PΩ(k)
=pX|Ω(x | ω)PΩ(ω)
pX(x)
where
• Ω is the r.v. representing the class and can take values1, . . . ,K.
• X is the r.v. denoting the feature vector.
A typical decision rule (class assignment)
Choose the class ω ∈ 1, . . . ,K s.t.
ω∗ = arg max1≤k≤K
PΩ|X(k | x)

Bayes’ Classifier in a nutshell
1. Learn the class conditional distributions for each class ω.
2. This gives PX|Ω(x | ω)
3. Estimate the prior PΩ(ω) of each class
4. For a new data point x make a prediction with:
ω∗ = arg maxω
PX|Ω(x | ω)PΩ(ω)
Step one is know as density estimation. This will be the topic ofseveral future lectures. We will also be examining the strengthsand weaknesses of the Bayes’ classifiers.

Independence
If X and Y are independent then knowing that Y = y tells usnothing about variable X (and vice-versa) that is
PX|Y (x | y) = PX(x)
PY |X(y | x) = PY (y)
a) b)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Independence
If X and Y are independent then knowing that Y = y tells usnothing about variable X (and vice-versa) that is
pX|Y (x | y) = pX(x)
pY |X(y | x) = pY (y)
a) b)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Independence
When X and Y are independent then
PX,Y (x, y) = PX|Y (x | y)PY (y)
= PY |X(y | x)PX(x)
= PX(x)PY (y)
a) b)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Expectations

Expectation
Expectation tell us the average value of some function f(x) takinginto account the distribution of x.
Definition:
E [f(X)] =∑x∈AX
f(x)PX(x)
E [f(X)] =
∫x∈AX
f(x) pX(x) dx
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Expectation
Expectation tell us the average value of some function f(x) takinginto account the distribution of x.
Definition in two dimensions:
E [f(X,Y )] =
∫y∈AY
∫x∈AX
f(x, y) pX,Y (x, y) dx dy
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Expectation: Common Cases
Function f(X) Expectation
X mean, µXXk kth moment about zero(X − µX)k kth moment about the mean(X − µX)2 variance(X − µX)3 skew(X − µX)4 kurtosis(X − µX)(Y − µY ) covariance of X and Y
E [f(X)] =
∫x∈AX
f(x) pX(x) dx
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Expectation: Rules
E [f(X)] =
∫x∈AX
f(x) pX(x) dx
Rule 1:
Expected value of a constant function f(X) = κ is a constant:
E [f(X)] =
∫xf(x) pX(x) dx
=
∫xκ pX(x) dx
= κ
∫xpX(x) dx
= κ
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Expectation: Rules
E [f(X)] =
∫x∈AX
f(x) pX(x) dx
Rule 2:
Expected value of a function g(X) = κ f(x) then
E [g(X)] = E [κ f(X)] =
∫xκ f(x) pX(x) dx
= κ
∫xf(x) pX(x) dx
= κE [f(X)]
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Expectation: Rules
E [f(X)] =
∫x∈AX
f(x) pX(x) dx
Rule 3:
Expected value of a function f(X) = g(X) + h(X) then
E [f(X)] = E [g(X) + h(X)] =
∫x(g(x) + h(x)) pX(x) dx
=
∫xg(x) pX(x) dx+
∫xh(x) pX(x) dx
= E [g(X)] + E [h(X)]
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Expectation: Rules
E [f(X)] =
∫x∈AX
f(x) pX(x) dx
Rule 4:
If X and Y are independent r.v.’s the expected value of a functionf(X,Y ) = g(X)h(Y ) is
E [f(X,Y )] = E [g(X)h(Y )] =
∫y
∫xg(x)h(y) pX,Y (x, y) dx dy
=
∫y
∫xg(x)h(y) pX(x) pY (y) dx dy
=
∫xg(x) pX(x) dx
∫yh(y) pY (y) dy
= E [g(X)] E [h(Y )]
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Expectation of a vector
Mean vector
E [X] = (E [X1] ,E [X2] , . . . ,E [Xp])T = (µX1 , . . . , µXp)
T = µX
Mean

Expectation of matrix
Covariance matrix
E[(X− µX)(X− µX)
T]
=
E[(X1 − µX1
)(X1 − µX1)]
. . . E[(X1 − µX1
)(Xp − µXp )]
.
.
.. . .
.
.
.
E[(Xp − µXp )(X1 − µX1
)]
. . . E[(Xp − µXp )(Xp − µXp )
]
=
σ21 · · · c1p
· · ·. . . · · ·
c1p · · · σ2p
= Σ

Covariance matrix
The covariance matrix
Σ = cjk indicates the tendency of each pair of features(dimensions in a random vector) to co-vary.
The covariance has several important properties
- If Xi and Xk tend to increase together ⇐⇒ cik > 0
- If Xi tends to decrease when Xk increases ⇐⇒ cik < 0
- If Xi and Xk are uncorrelated ⇐⇒ cik = 0
- |cik| ≤ σi σk, where σi is the standard deviation of Xi
- cii = σ2i = Var [Xi].

Covariance matrix
Covariance terms can be expressed as
cii = σ2i and cik = ρikσiσk
where ρik is called the correlation coefficient.
ρik = −1 ρik = − 12 ρik = 0 ρik = 1
2 ρik = 1
Introduction to Pattern AnalysisRicardo Gutierrez-OsunaTexas A&M University
17
Covariance matrix (1)! The covariance matrix indicates the tendency of each pair of features
(dimensions in a random vector) to vary together, i.e., to co-vary*! The covariance has several important properties
" If xi and xk tend to increase together, then cik>0" If xi tends to decrease when xk increases, then cik<0" If xi and xk are uncorrelated, then cik=0" |cik|!"i"k, where "i is the standard deviation of xi
" cii = "i2 = VAR(xi)
! The covariance terms can be expressed as
" where #ik is called the correlation coefficientkiikik
2iii candc ""#" $$
Xi
Xk
Cik=-"i"k#ik=-1
Xi
Xk
Cik=-½"i"k#ik=-½
Xi
Xk
Cik=0#ik=0
Xi
Xk
Cik=+½"i"k#ik=+½
Xi
Xk
Cik="i"k#ik=+1
*from http://www.engr.sjsu.edu/~knapp/HCIRODPR/PR_home.htm

Covariance matrix II
The covariance matrix can be reformulated as
Σ = E[(X− µX)(X− µX)T
]= E
[XXT
]−µXµTX = S−µXµTX
with
S = E[XXT
]=
E [X1X1] . . . E [X1Xp]... . . .
...E [XpX1] . . . E [XpXp]
S is called the auto-correlation matrix and contains the sameamount of information as the covariance matrix.

Covariance matrix II
The covariance matrix can also be expressed as
Σ = ΓRΓ =
σ1 0 . . . 00 σ2 . . . 0...
.... . .
...0 0 . . . σp
1 ρ12 . . . ρ1pρ12 1 . . . ρ2p...
.... . .
...ρ1p ρ2p . . . 1
σ1 0 . . . 00 σ2 . . . 0...
.... . .
...0 0 . . . σp
• A convenient formulation since Γ contains the scales of thefeatures and R retains the essential information of therelationship between the features.
• R is the correlation matrix.

Covariance matrix II
Decorrelation Vs. Independence
• Two random variables Xi and Xk are uncorrelated if
E [XiXk] = E [Xi] E [Xk]
Uncorrelated variables are also called linearly independent.
• Two random variables Xi and Xk are independent if
pXi,Xk(xi, xk) = pXi(xi) pXk(xk) ∀xi, xk

Covariance intuition
σx
σ y
σx = 0.2249, σy = 0.2588

Covariance intuition
• Eigenvectors of Σ are the orthogonal directions where there isthe most spread in the underlying distribution.
• The eigenvalues indicate the magnitude of the spread.

The Normal Distribution

Some Motivation
When are they used?
• To represent pX|Ω(x | ω).
• As a building block in the representation of pX|Ω(x | ω).
• Modelling the noise between inputs and observations
y = f(x) + e, e ∼ N (0,Σ)
Why are they so important?
• Central Limit Theoremif x1, . . . , xn are i.i.d. then v = (
∑xi)/n is distributed
approximately normally.
• Easy to work with! For Gaussian distributions manyresults can be derived analytically.

Univariate Normal Distribution
• Univariate normal distribution is a pdf describing a continuousvariable:
pX(x) = 1√2πσ2
exp−1
2
(x−µσ
)2• Defined by 2 parameters µ and σ > 0.
(0.0,1.0)
(-3.4,0.25)
(1.5,4.41)
Prob
abili
ty D
ensi
ty
-6 60
• Will denote the Normal distribution by
N (µ, σ2)

Univariate Normal Distribution
pX(x) = 1√2πσ2
exp−1
2
(x−µσ
)2• If X ∼ N (x;µ, σ2) then
E [X] = µ
Var [X] = σ2
• Write X ∼ N (x;µ, σ2) to denote:
X is distributed Normally with mean µ and variance σ2.

The Central Limit Theorem
• Assume X1, X2, . . . , Xn are i.i.d. random variables with
E [Xi] = µ
Var [Xi] = σ2
• Define
Zn = f(X1, X2, . . . , Xn) =1
n
n∑i=1
Xi
then
pZn(z) = N (z;µ, σ2/n)
for sufficiently large n.

Illustration
• n = 1for j = 1 to 500
One sample, xj,1, is drawn from a uniform distribution.Compute and record zj =
∑ni=1 xj,i/n.
Introduction to Pattern AnalysisRicardo Gutierrez-OsunaTexas A&M University
21
Central Limit Theorem! The central limit theorem states that given a distribution with a mean !
and variance "2, the sampling distribution of the mean approaches a normal distribution with a mean (!) and a variance "i
2/N as N, the sample size, increases.
" No matter what the shape of the original distribution is, the sampling distribution of the mean approaches a normal distribution
" Keep in mind that N is the sample size for each mean and not the number of samples
! A uniform distribution is used to illustrate the idea behind the Central Limit Theorem
" Five hundred experiments were performed using am uniform distribution
! For N=1, one sample was drawn from the distribution and its mean was recorded (for each of the 500 experiments)
" Obviously, the histogram shown a uniform density! For N=4, 4 samples were drawn from the
distribution and the mean of these 4 samples was recorded (for each of the 500 experiments)
" The histogram starts to show a Gaussian shape! And so on for N=7 and N=10! As N grows, the shape of the histograms resembles
a Normal distribution more closely
The histogram of the zj ’s shows a uniform density.
• n = 4for j = 1 to 500
Four samples, xj,1, . . . , xj,4, are drawn from a uniform distribution.Compute and record zj =
∑ni=1 xj,i/n.
Introduction to Pattern AnalysisRicardo Gutierrez-OsunaTexas A&M University
21
Central Limit Theorem! The central limit theorem states that given a distribution with a mean !
and variance "2, the sampling distribution of the mean approaches a normal distribution with a mean (!) and a variance "i
2/N as N, the sample size, increases.
" No matter what the shape of the original distribution is, the sampling distribution of the mean approaches a normal distribution
" Keep in mind that N is the sample size for each mean and not the number of samples
! A uniform distribution is used to illustrate the idea behind the Central Limit Theorem
" Five hundred experiments were performed using am uniform distribution
! For N=1, one sample was drawn from the distribution and its mean was recorded (for each of the 500 experiments)
" Obviously, the histogram shown a uniform density! For N=4, 4 samples were drawn from the
distribution and the mean of these 4 samples was recorded (for each of the 500 experiments)
" The histogram starts to show a Gaussian shape! And so on for N=7 and N=10! As N grows, the shape of the histograms resembles
a Normal distribution more closely
The histogram of the zj ’s starts to show a Gaussian shape.

Illustration
• Similarly for n = 7
Introduction to Pattern AnalysisRicardo Gutierrez-OsunaTexas A&M University
21
Central Limit Theorem! The central limit theorem states that given a distribution with a mean !
and variance "2, the sampling distribution of the mean approaches a normal distribution with a mean (!) and a variance "i
2/N as N, the sample size, increases.
" No matter what the shape of the original distribution is, the sampling distribution of the mean approaches a normal distribution
" Keep in mind that N is the sample size for each mean and not the number of samples
! A uniform distribution is used to illustrate the idea behind the Central Limit Theorem
" Five hundred experiments were performed using am uniform distribution
! For N=1, one sample was drawn from the distribution and its mean was recorded (for each of the 500 experiments)
" Obviously, the histogram shown a uniform density! For N=4, 4 samples were drawn from the
distribution and the mean of these 4 samples was recorded (for each of the 500 experiments)
" The histogram starts to show a Gaussian shape! And so on for N=7 and N=10! As N grows, the shape of the histograms resembles
a Normal distribution more closely
• Similarly for n = 10
Introduction to Pattern AnalysisRicardo Gutierrez-OsunaTexas A&M University
21
Central Limit Theorem! The central limit theorem states that given a distribution with a mean !
and variance "2, the sampling distribution of the mean approaches a normal distribution with a mean (!) and a variance "i
2/N as N, the sample size, increases.
" No matter what the shape of the original distribution is, the sampling distribution of the mean approaches a normal distribution
" Keep in mind that N is the sample size for each mean and not the number of samples
! A uniform distribution is used to illustrate the idea behind the Central Limit Theorem
" Five hundred experiments were performed using am uniform distribution
! For N=1, one sample was drawn from the distribution and its mean was recorded (for each of the 500 experiments)
" Obviously, the histogram shown a uniform density! For N=4, 4 samples were drawn from the
distribution and the mean of these 4 samples was recorded (for each of the 500 experiments)
" The histogram starts to show a Gaussian shape! And so on for N=7 and N=10! As N grows, the shape of the histograms resembles
a Normal distribution more closelyAs n grows the histogram increasingly resembles a Gaussian.

Multivariate Normal Distribution
pX(x) = 1(2π)p/2|Σ|1/2 exp
−1
2(x− µ)TΣ−1(x− µ)
where x ∈ Rp.
Properties of the multivariate normal distribution:
• Defined by 2 quantities µ ∈ Rp and Σ ∈ Rp×p
• Σ must be symmetric and positive definite.
• Its first and second order moments are
E [X] = µ
Cov [X] = Σ

General Gaussian
µ =
µ1
µ2
...µp
, Σ =
σ21 σ12 · · · σ1p
σ12 σ22 · · · σ2p
......
. . ....
σ1p σ2p · · · σ2p
−20 −15 −10 −5 0 5 10 15 20
−15
−10
−5
0
5
10
15

Axis-aligned Gaussian
µ =
µ1
µ2
...µp
, Σ =
σ21 0 · · · 0 0
0 σ22 · · · 0 0
......
. . ....
...0 0 · · · σ2
p−1 00 0 · · · 0 σ2
p
−25 −20 −15 −10 −5 0 5 10 15 20 25
−15
−10
−5
0
5
10
15

Spherical Gaussian
µ =
µ1
µ2
...µp
, Σ =
σ2 0 · · · 0 00 σ2 · · · 0 0...
.... . .
......
0 0 · · · σ2 00 0 · · · 0 σ2
−15 −10 −5 0 5 10 15−15
−10
−5
0
5
10
15

Degenerate Gaussian
µ =
µ1
µ2
...µp
, |Σ| = 0

Explicit Illustrations
5
-5
-5 5-5 5-5 5
5
-5
a ) c ) e )
b ) d ) f)
Spherical covariances Diagonal covariances Full covariances
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Diagonal Covariance = Independence
• Say µ =(0 0
)Tand Σ =
(σ21 0
0 σ22
)then
pX1,X2(x1, x2) =1
2π√|Σ|
exp
−0.5
(x1 x2
)Σ−1
(x1x2
)
=1
2πσ1σ2exp
−0.5
(x1 x2
)(σ−21 00 σ−2
2
)(x1x2
)
=1
σ1
√2π
exp
− x21
2σ21
1
σ2
√2π
exp
− x22
2σ22
= pX1(x1) pX2(x2)
• Similarly can easily show
pX1,...,Xp(x1, . . . , xp) =
p∏i=1
pXp(xp)
when Σ = diag(σ21 , . . . , σ
2p)

Diagonal Covariance = Independence
• Say µ =(0 0
)Tand Σ =
(σ21 0
0 σ22
)then
pX1,X2(x1, x2) =1
2π√|Σ|
exp
−0.5
(x1 x2
)Σ−1
(x1x2
)
=1
2πσ1σ2exp
−0.5
(x1 x2
)(σ−21 00 σ−2
2
)(x1x2
)
=1
σ1
√2π
exp
− x21
2σ21
1
σ2
√2π
exp
− x22
2σ22
= pX1(x1) pX2(x2)
• Similarly can easily show
pX1,...,Xp(x1, . . . , xp) =
p∏i=1
pXp(xp)
when Σ = diag(σ21 , . . . , σ
2p)

Decomposition of the Covariance Matrix
• Say X ∼ N (x;µ,Σ)
• Assuming Σ is diagonalizable then Σ = U Σdiag U−1 where
∗ Each column of U is an eigenvector of Σ.
∗ Σdiag is a diagonal matrix whose diagonal elements are the
eigenvalues of Σ.
• Σ is symmetric =⇒ U−1 = UT =⇒ Σ = U Σdiag UT
• Therefore
pX(x) =1
2π√|Σ|
exp−0.5xTΣx
=
1
2π√|U Σdiag U−1|
exp−0.5xTU Σ−1
diag UT x
=1
2π√|U | |Σdiag| |U |−1
exp−0.5 (UTx)T Σ−1
diag (UT x), |AB| = |A||B|
=1
2π√|Σdiag|
exp−0.5x′T Σ−1
diag x′
= pX′(x′), x′= P
Tx

Decomposition of the Covariance Matrix
• Say X ∼ N (x;µ,Σ)
• Assuming Σ is diagonalizable then Σ = U Σdiag U−1 where
∗ Each column of U is an eigenvector of Σ.
∗ Σdiag is a diagonal matrix whose diagonal elements are the
eigenvalues of Σ.
• Σ is symmetric =⇒ U−1 = UT =⇒ Σ = U Σdiag UT
• Therefore
pX(x) =1
2π√|Σ|
exp−0.5xTΣx
=
1
2π√|U Σdiag U−1|
exp−0.5xTU Σ−1
diag UT x
=1
2π√|U | |Σdiag| |U |−1
exp−0.5 (UTx)T Σ−1
diag (UT x), |AB| = |A||B|
=1
2π√|Σdiag|
exp−0.5x′T Σ−1
diag x′
= pX′(x′), x′= P
Tx

Decomposition of the Covariance Matrix
• UT is orthogonal UTU = I =⇒ UT is a rotation matrix
• Therefore relationship between pink and green frames ofreference is
X′ = UTX = RX
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Transformation of Variables
b)a)
• Let X ∼ N (x;µ,Σ).
• Transform X to create
Y = AX + b
• Then
pY(y) = N (y;Aµ + b, ATΣA)Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Marginal Distributions
• Marginal distributions of amultivariate normal are alsonormal
pX(x) = pX
((x1
x2
))= N
(x;
(µ1
µ2
),
(Σ11 ΣT21Σ21 Σ22
))• Then
pX1(x1) = N (x1;µ1,Σ11)
pX2(x2) = N (x2;µ2,Σ22)
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Conditional Distributions
• If pX(x) = pX
((x1
x2
))= N
(x;
(µ1
µ2
),
(Σ11 ΣT12Σ12 Σ22
))then
pX1|X2(x1 | x2) = N
(x1;µ1 + ΣT12 Σ−1
22 (x2 − µ2),Σ11 − ΣT12Σ−122 Σ12
),
pX2|X1(x2 | x1) = N
(x2;µ2 + Σ12 Σ−1
11 (x1 − µ1),Σ22 − Σ12Σ−111 ΣT12
)a)
-5 5-5
5b)
-5 5-5
5
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Conditional Distributions
a)
-5 5-5
5b)
-5 5-5
5
Note: For spherical / diagonal case, X1 and X2 are independentso all of the conditional distributions are the same.
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Change of Variables
If
X | (Y = y) ∼ N (x; ay + b, σ2)
then
Y | (X = x) ∼ N (y; a′x+ b′, σ′2)
a) b)
0
1
0 1 0 10
1
Slide Source: Computer vision: models, learning and inference. 2011 Simon J.D. Prince

Today’s assignment

Pen & Paper assignment
• Details available on the course website.
• You will be asked to perform some simple Bayesian reasoning.
• Mail me about any errors you spot in the Exercise notes.
• I will notify the class about errors spotted and corrections viathe course website and mailing list.
Related Documents