1 Lecture 2: Discrete-Time Signals & Systems Reza Mohammadkhani, Digital Signal Processing, 2015 University of Kurdistan eng.uok.ac.ir/mohammadkhani

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
Lecture 2:
Discrete-Time Signals & Systems
Reza Mohammadkhani, Digital Signal Processing, 2015University of Kurdistan eng.uok.ac.ir/mohammadkhani
Signal Definition and Examples 2
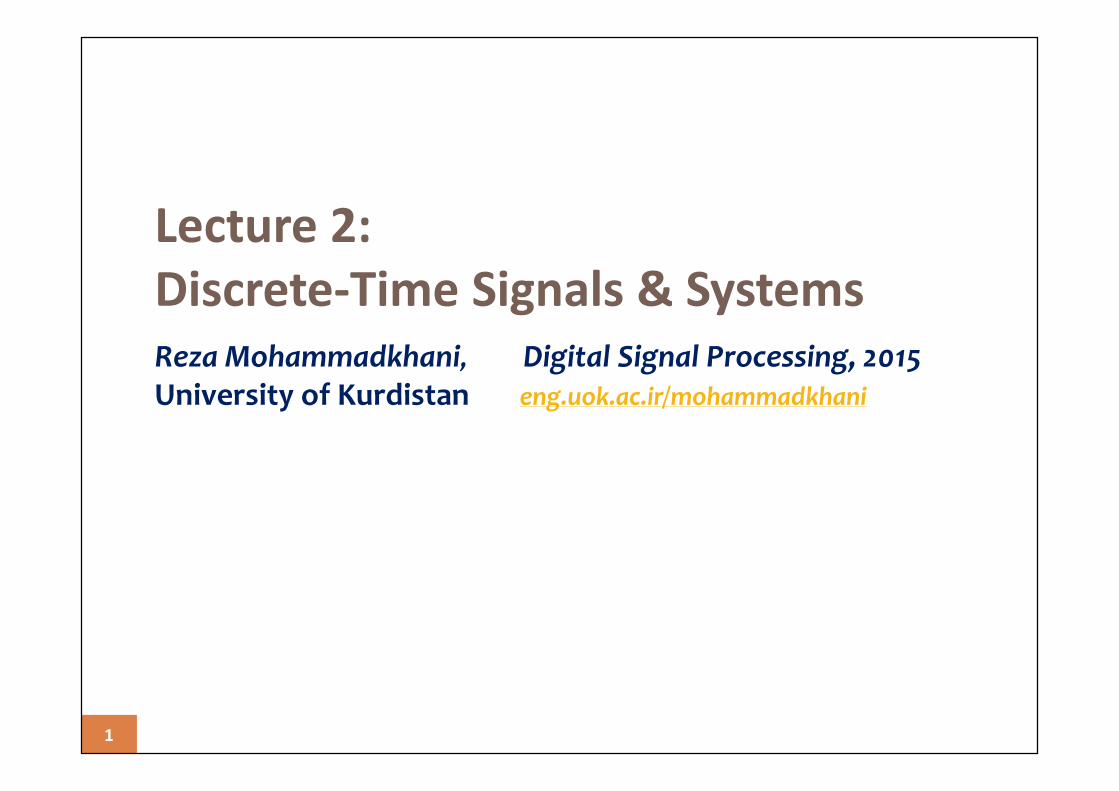
� Signal: any physical quantity that varies with time,
space, or any other independent variable/variables
Example 1: speech signals
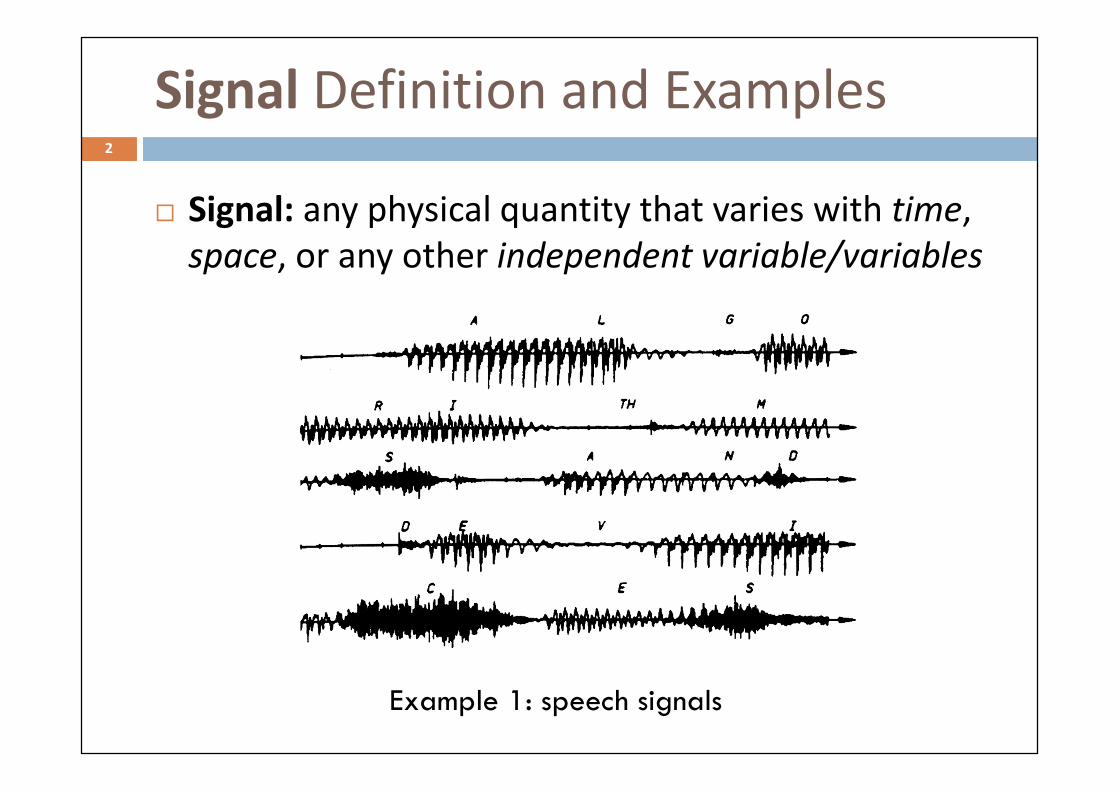
� Intensity of brightness: � �, �Example 2: Black & White Picture
3
� �, �
�
�
� Black and white video: � �, �, �
� � �, � � �� �, � , � �, � , �� �, � �
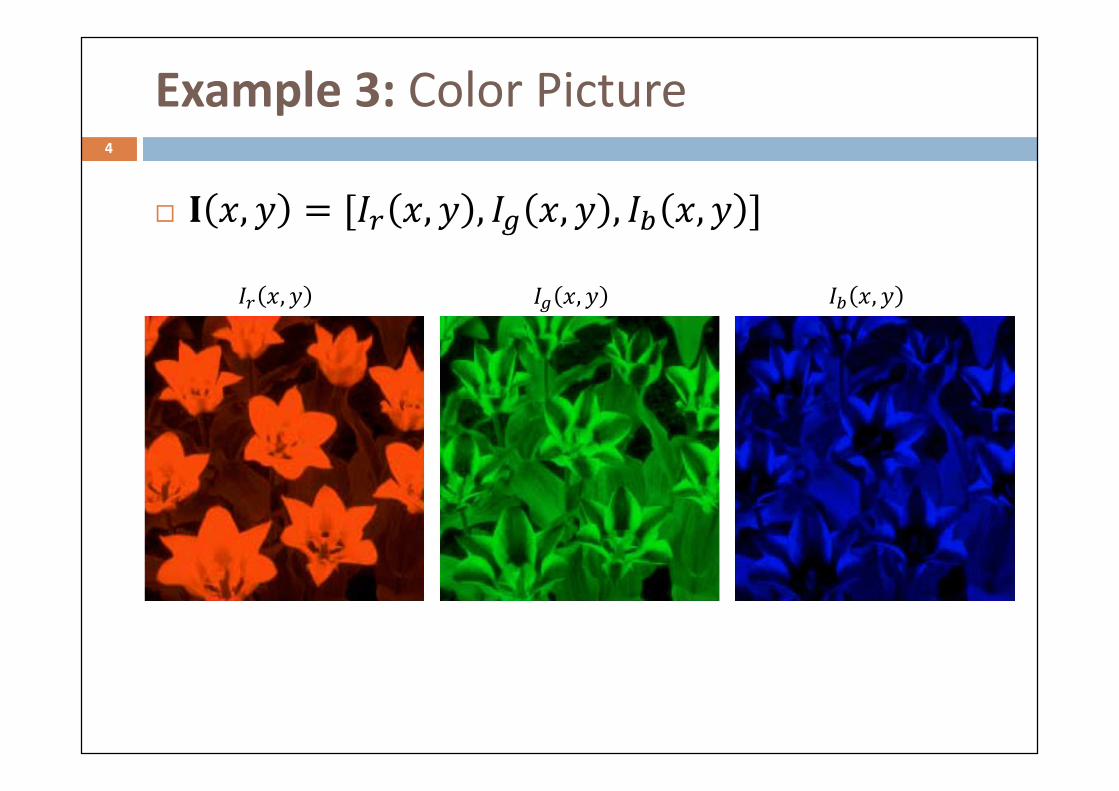
Example 3: Color Picture4
� �, � � �, � �� �, �
… full color image5
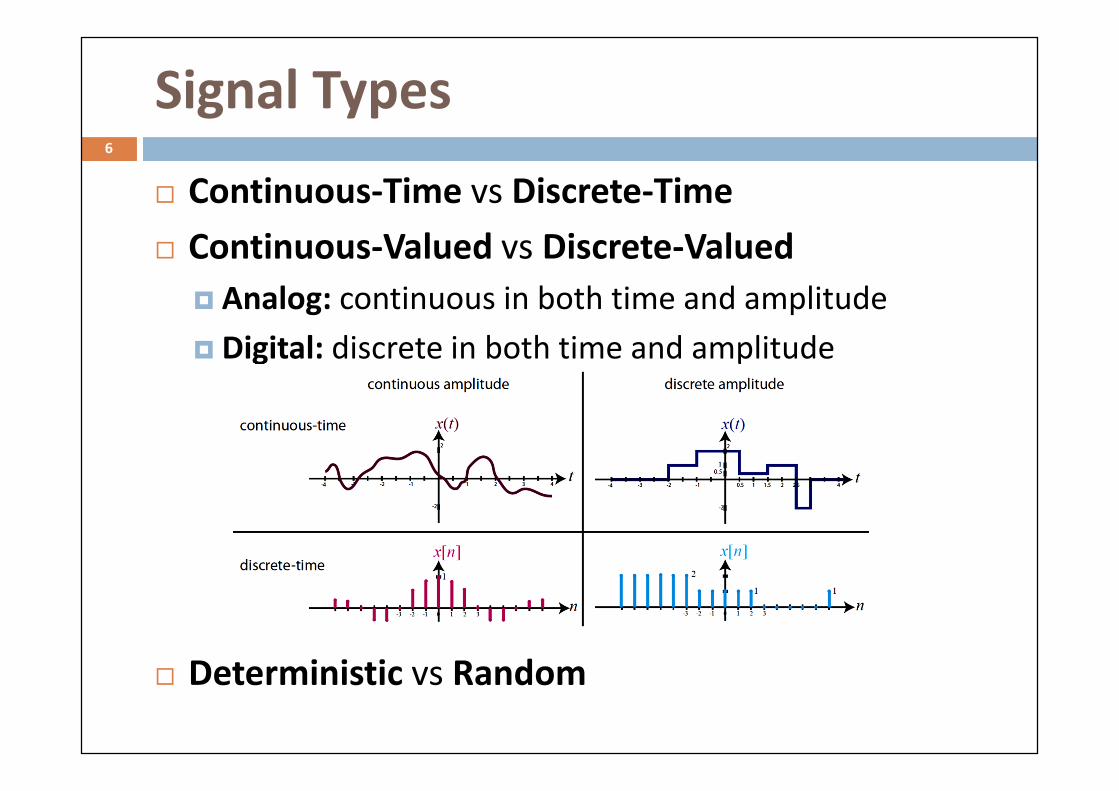
Signal Types6
� Continuous-Time vs Discrete-Time
� Continuous-Valued vs Discrete-Valued
� Analog: continuous in both time and amplitude
� Digital: discrete in both time and amplitude
� Deterministic vs Random

Discrete-Time Signal7
� A sequence of numbers defined for every integer
value of variable n: � = � , −∞ < < ∞� Can be sampled from a CT signal:� = �� � , −∞ < < ∞
where � is sampling period.
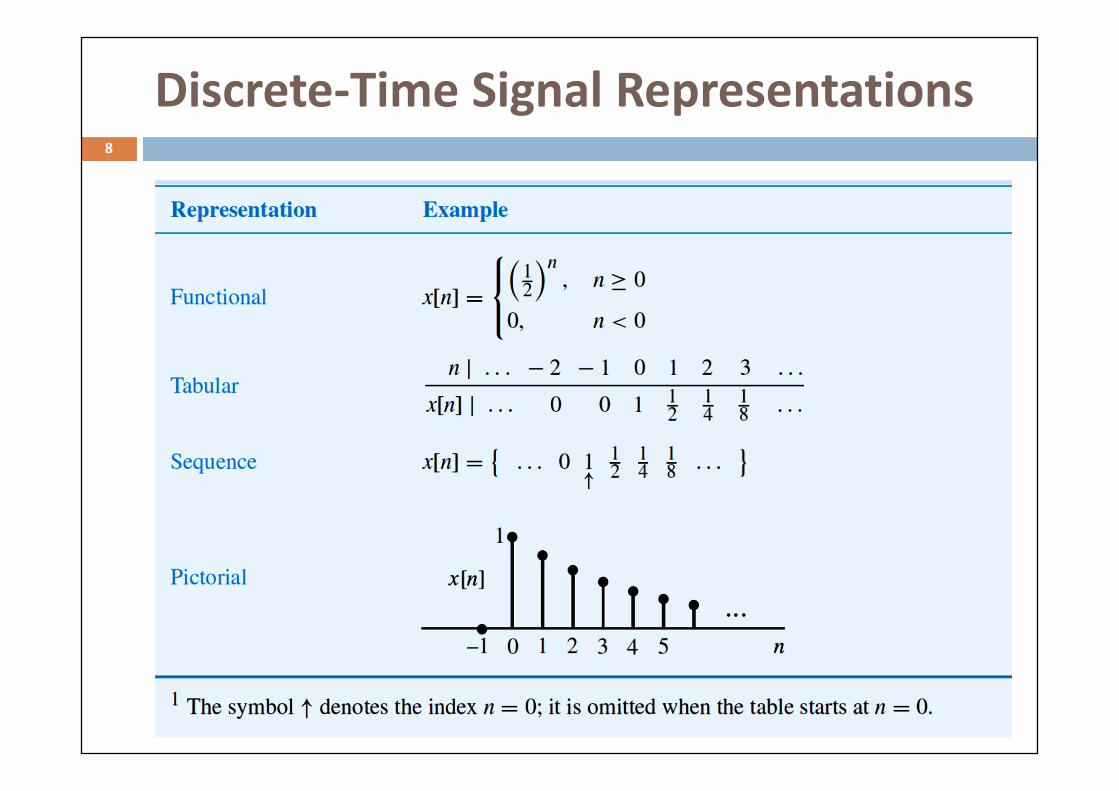
Discrete-Time Signal Representations8
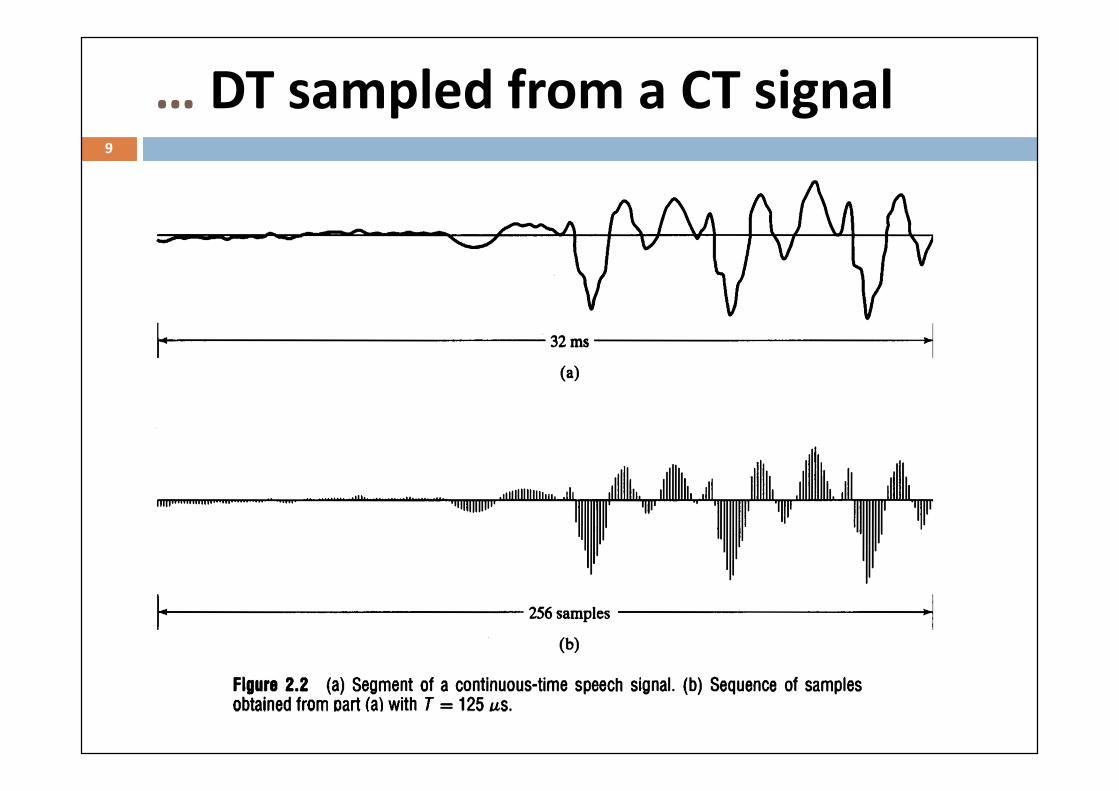
… DT sampled from a CT signal9
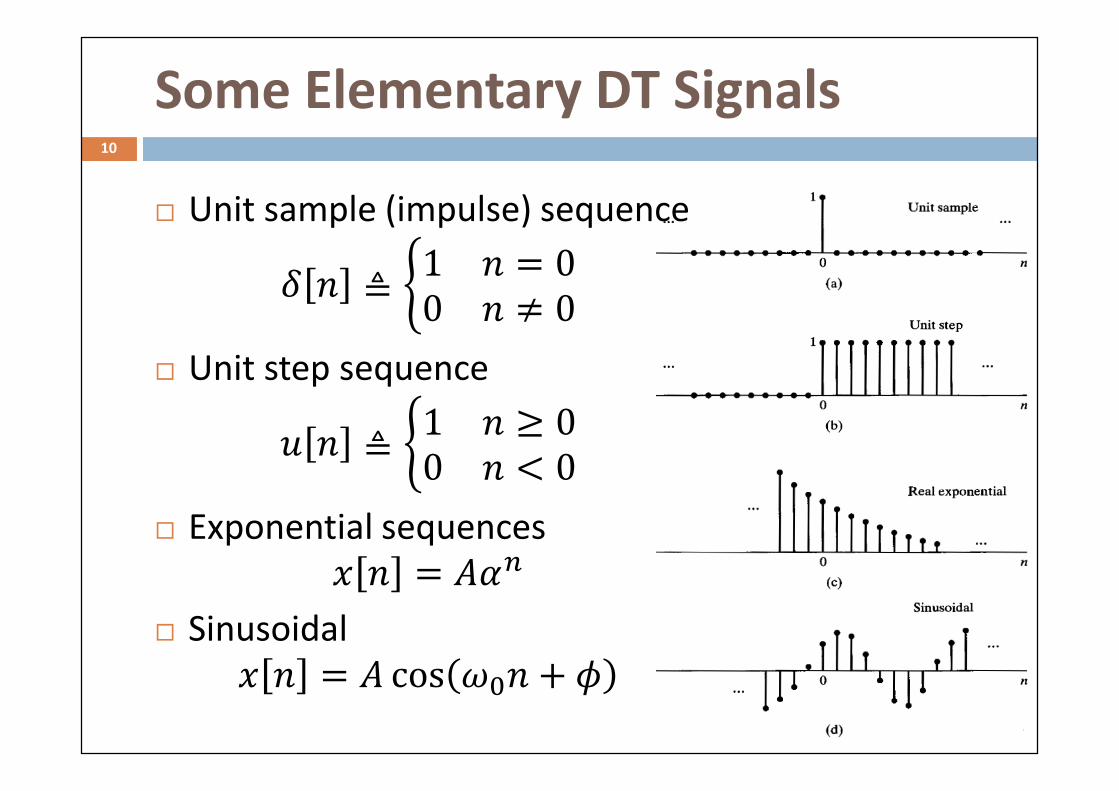
Some Elementary DT Signals10
� Unit sample (impulse) sequence
� ≜ �1 = 00 ≠ 0� Unit step sequence
� ≜ �1 ≥ 00 < 0� Exponential sequences� = ���� Sinusoidal� = � cos "# + %
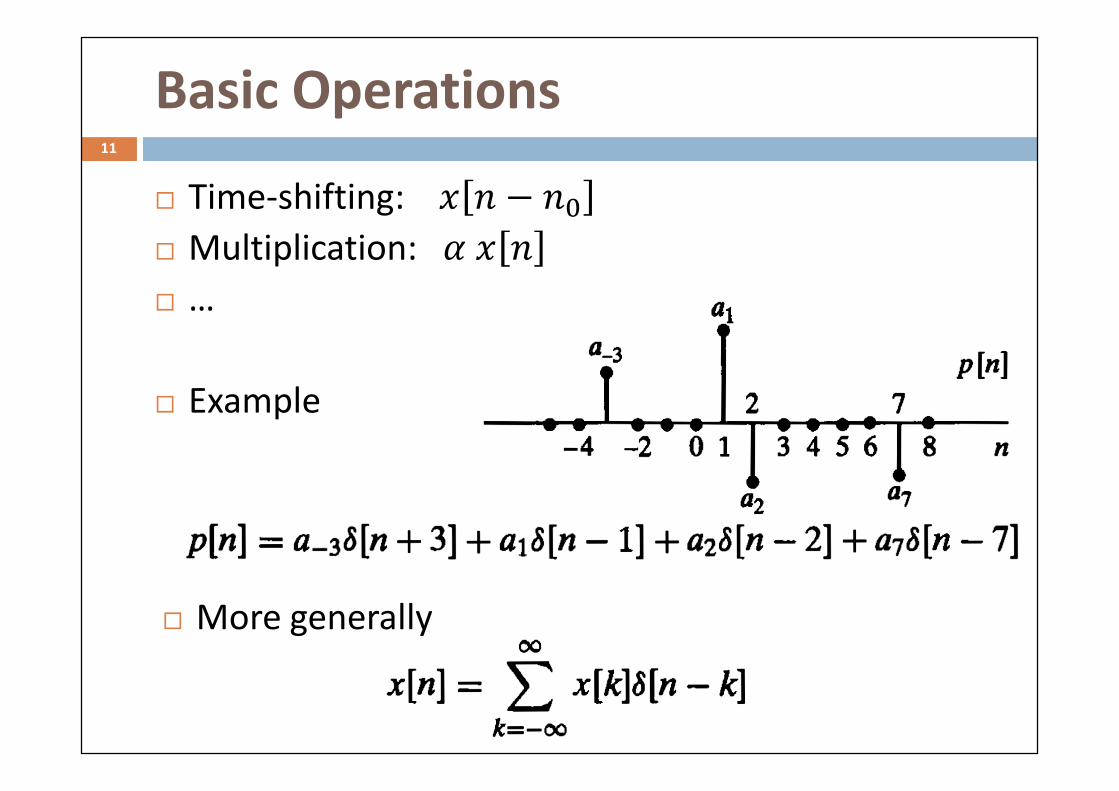
Basic Operations11
� Time-shifting: � − #� Multiplication: �� � …
� Example
� More generally
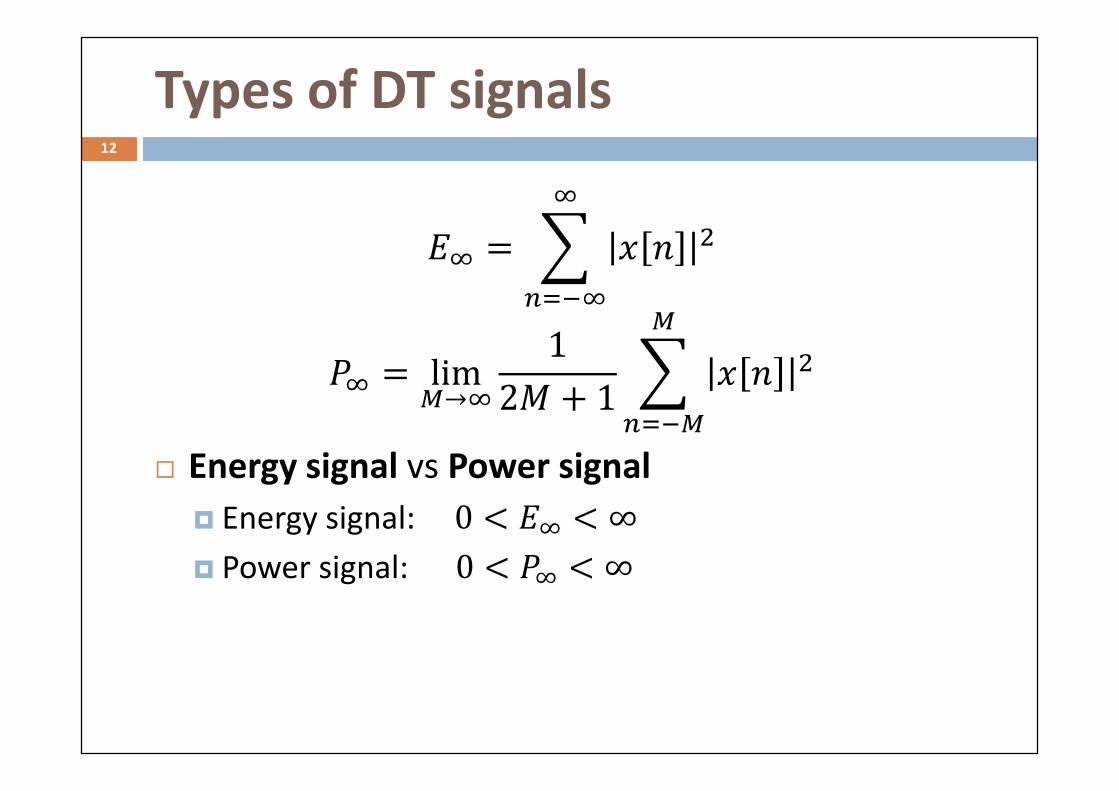
Types of DT signals12
&' = ( � )'
�*+',' = lim0→'
123 + 1 ( � )
0
�*+0� Energy signal vs Power signal
� Energy signal: 0 < &' < ∞� Power signal: 0 < ,' < ∞

Types of DT signals (2)13
� Even and Odd signals
� Any arbitrary signal � � Even: ∀ ∈ ℤ: � − = � � Odd: ∀ ∈ ℤ: � − = −�
� Periodic vs Aperiodic signals
� Periodic: ∀ ∈ ℤ, ∃ 9 ∈ ℤ � + 9 = �

Discrete-Time Systems14

Discrete-Time System15
� � � �
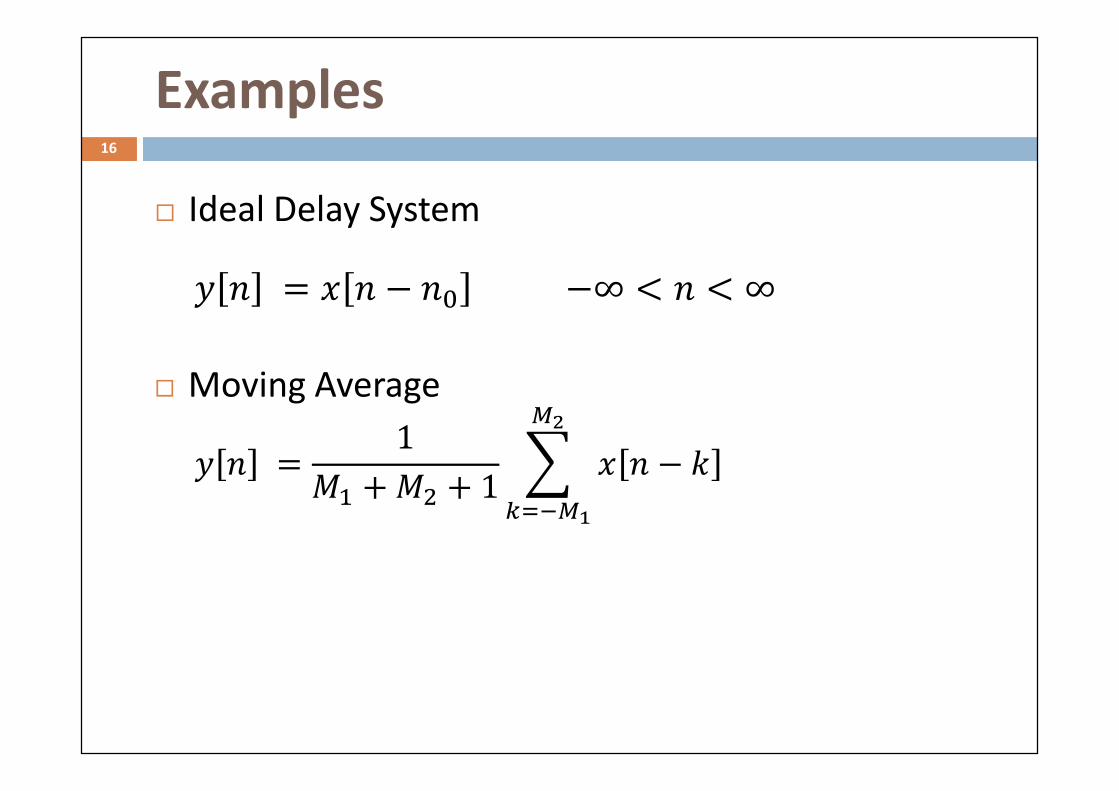
Examples16
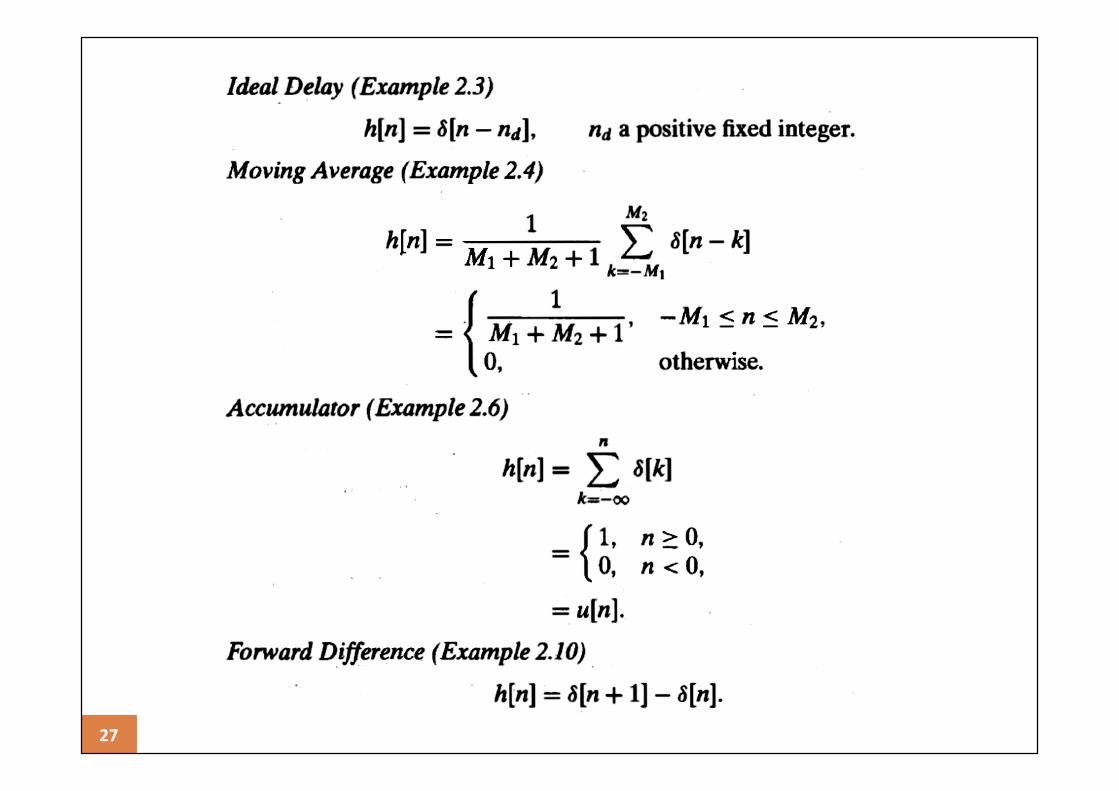
� Ideal Delay System
� = � − # −∞ < < ∞� Moving Average
� = 13: + 3) + 1 ( � − ;
0<
=*+0>
� Memoryless Systems
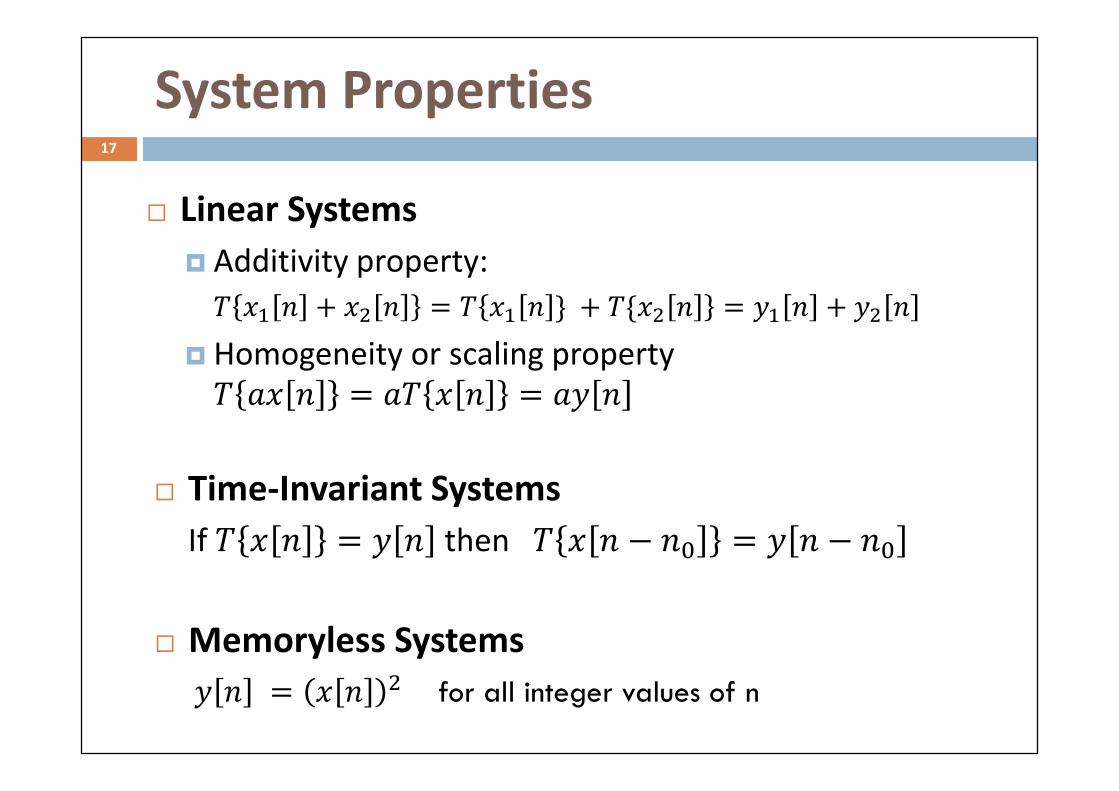
System Properties17
� Linear Systems
� Additivity property:
� �: + �) = � �: } + �{�) = �: + �) � Homogeneity or scaling property� A� = A� � = A�
� Time-Invariant Systems
If � � = � then � � − # = � − #
� = � ) for all integer values of n

System Properties (2)18
� Causality
System output sequence value at every = # only depends on the input sequence values for ≤ #.
� forward difference system� = � + 1 − � � backward difference system
� � = � − � − 1� Stability
If � ≤ CD < ∞ for all then � ≤ CE < ∞ for all Bounded-Input Bounded Output (BIBO)

Linear Time-Invariant Systems19
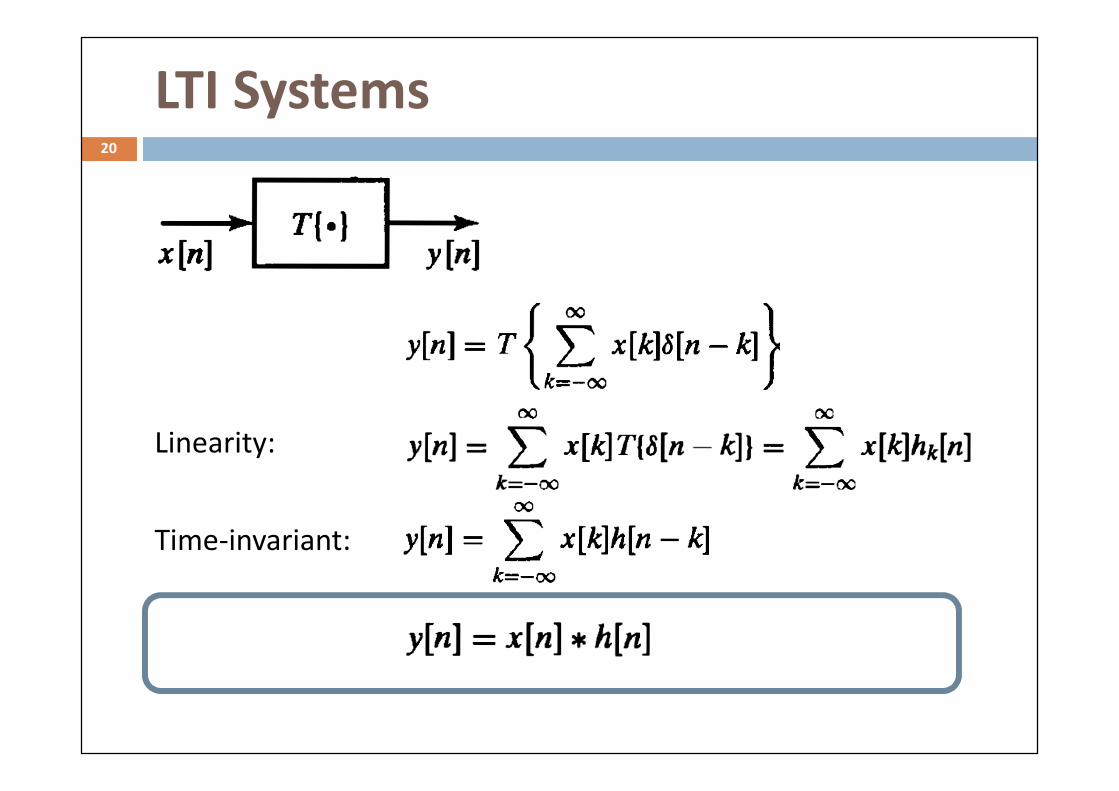
LTI Systems20
Linearity:
Time-invariant:

Example 21
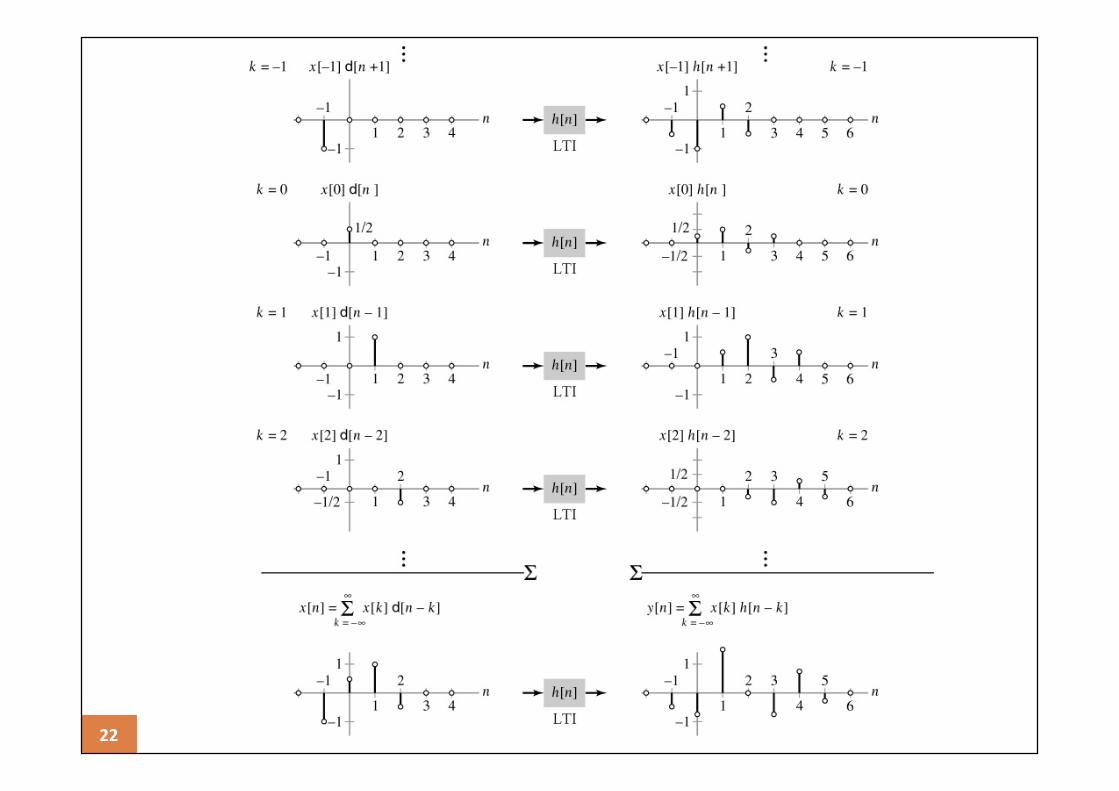
22

� Convolution is Commutative:
� Convolution is Distributive:
Properties of LTI systems23
h[n]x[n] y[n] x[n]h[n] y[n]
h1[n]
x[n] y[n]
h2[n]
+ h1[n]+ h2[n]x[n] y[n]
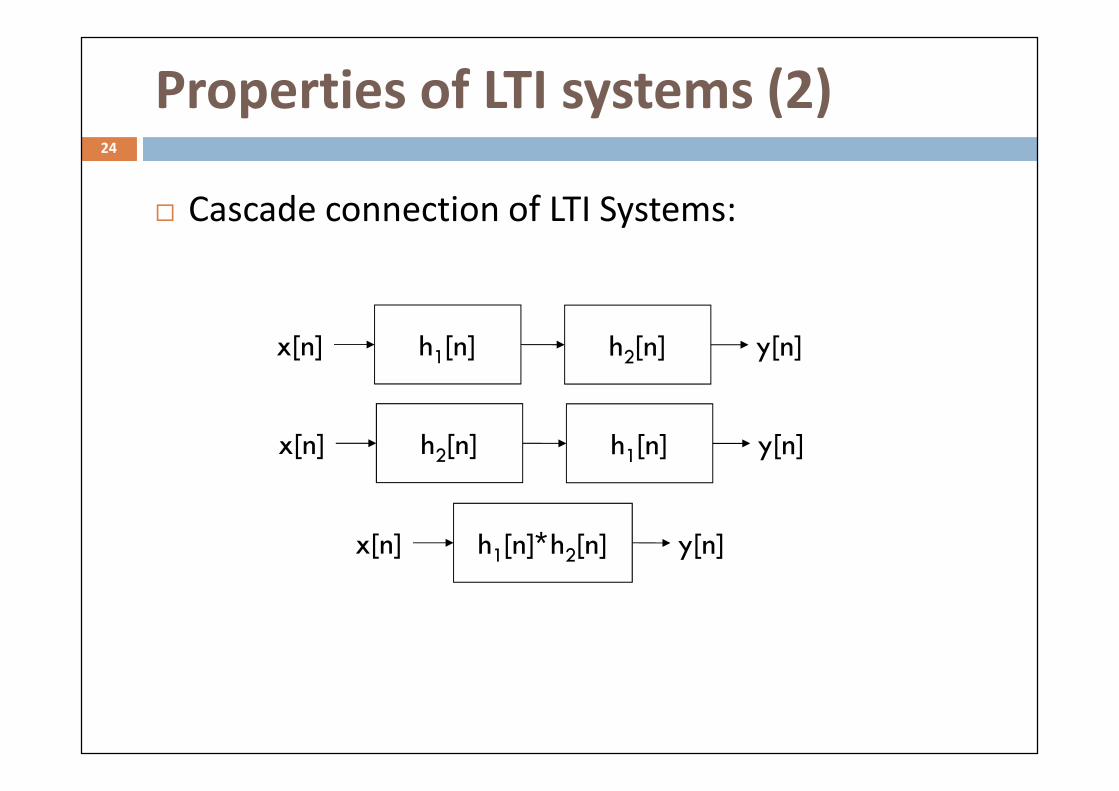
� Cascade connection of LTI Systems:
Properties of LTI systems (2)24
h1[n]x[n] h2[n] y[n]
h2[n]x[n] h1[n] y[n]
h1[n]∗h2[n]x[n] y[n]

Properties of LTI systems (3)25
� Causality of LTI systems:
ℎ ; = 0 for ; < 0
� Stability of LTI systems:
Impulse response is absolute summable:
( ℎ ;'
=*+'< ∞
� � = � ∗ ℎ = ∑ � ; ℎ − ;'=*+'� = ℎ ∗ � = ∑ ℎ ; � − ;'=*+'

Properties of LTI systems (4)26
� Memoryless LTI system
ℎ = I� � � = � ∗ ℎ = ∑ � ; ℎ − ;'=*+'� = ℎ ∗ � = ∑ ℎ ; � − ;'=*+'
� Finite Impulse Response (FIR) systems
� Infinite Impulse Response (IIR) systems
� Example: ℎ = 1/2 ��
27

Linear Constant-Coefficient
Difference Equations28

Linear Constant-Coefficient Difference Equations
29
� An important class of LTI systems
The output is not uniquely specified for a given input
� The initial conditions are required
� Linearity, time invariance, and causality depend on
the initial conditions
� If initial conditions are assumed to be zero, system is
linear, time invariant, and causal
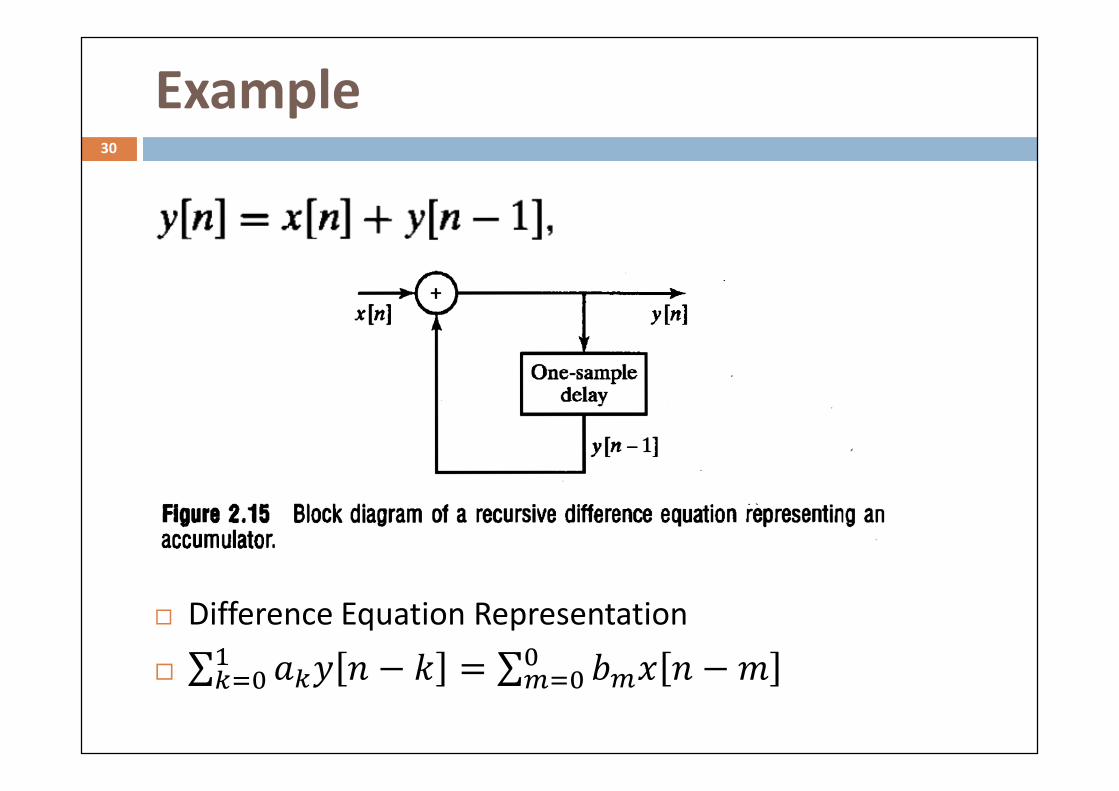
Example30
� Difference Equation Representation
� ∑ A=� − ;:=*# = ∑ KL� − M#L*#

Solution method 131
Homogeneous equation:
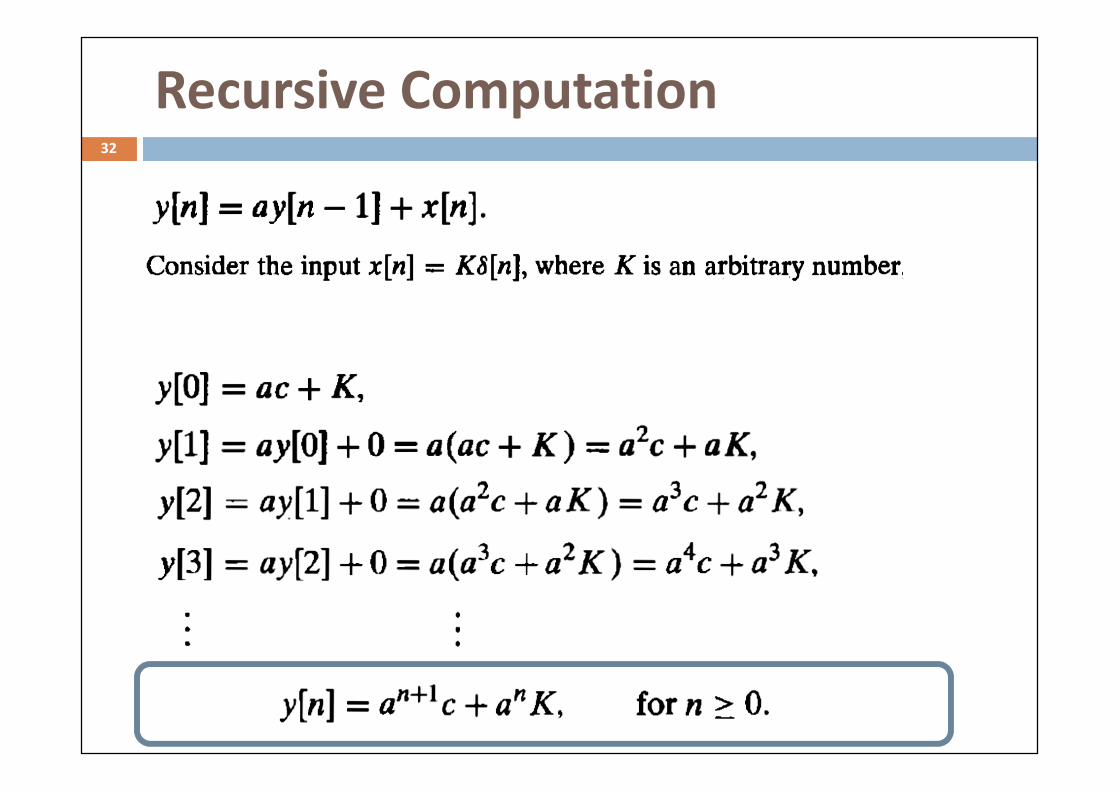
Recursive Computation 32

Frequency-Domain Representations of
Discrete-Time Signals & Systems33
Discrete-Time Fourier Transform34
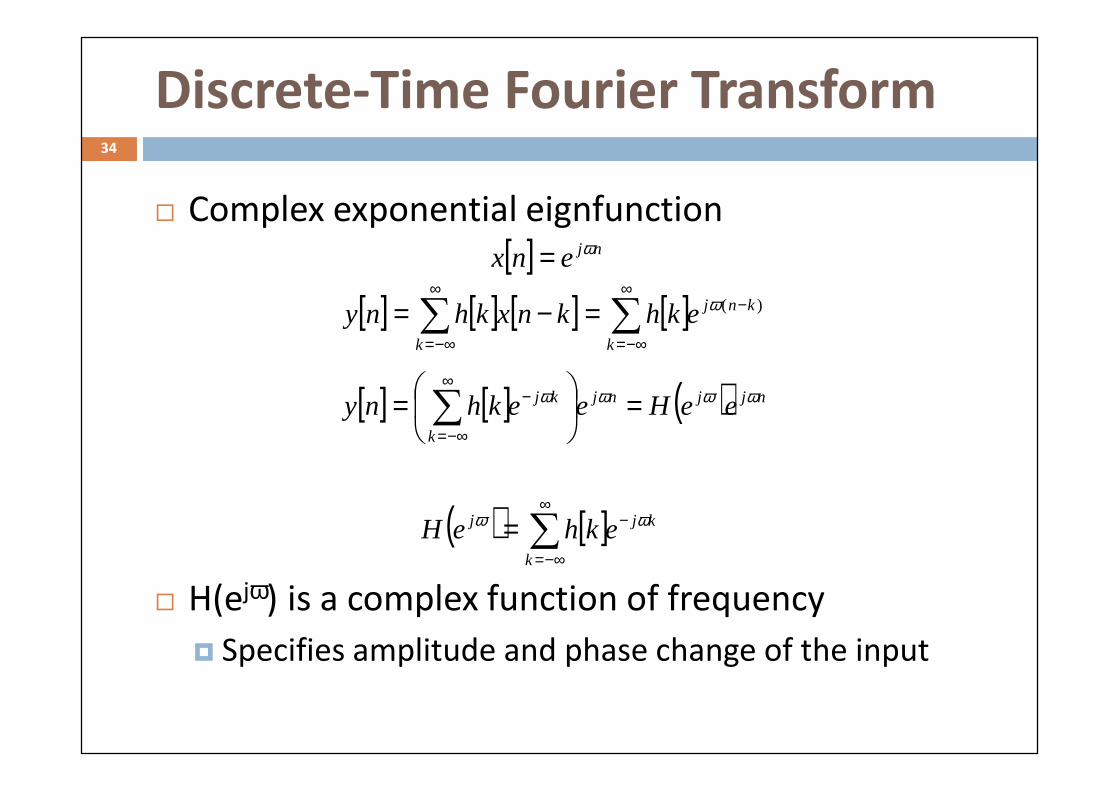
� Complex exponential eignfunction
� H(ejω) is a complex function of frequency
� Specifies amplitude and phase change of the input
[ ] njenx ω=
[ ] [ ] [ ] [ ] )( knj
kk
ekhknxkhny −∞
−∞=
∞
−∞=∑∑ =−= ω
[ ] [ ] ( ) njjnjkj
k
eeHeekhny ωωωω =
= −∞
−∞=∑
( ) [ ] kj
k
j ekheH ωω −∞
−∞=∑=
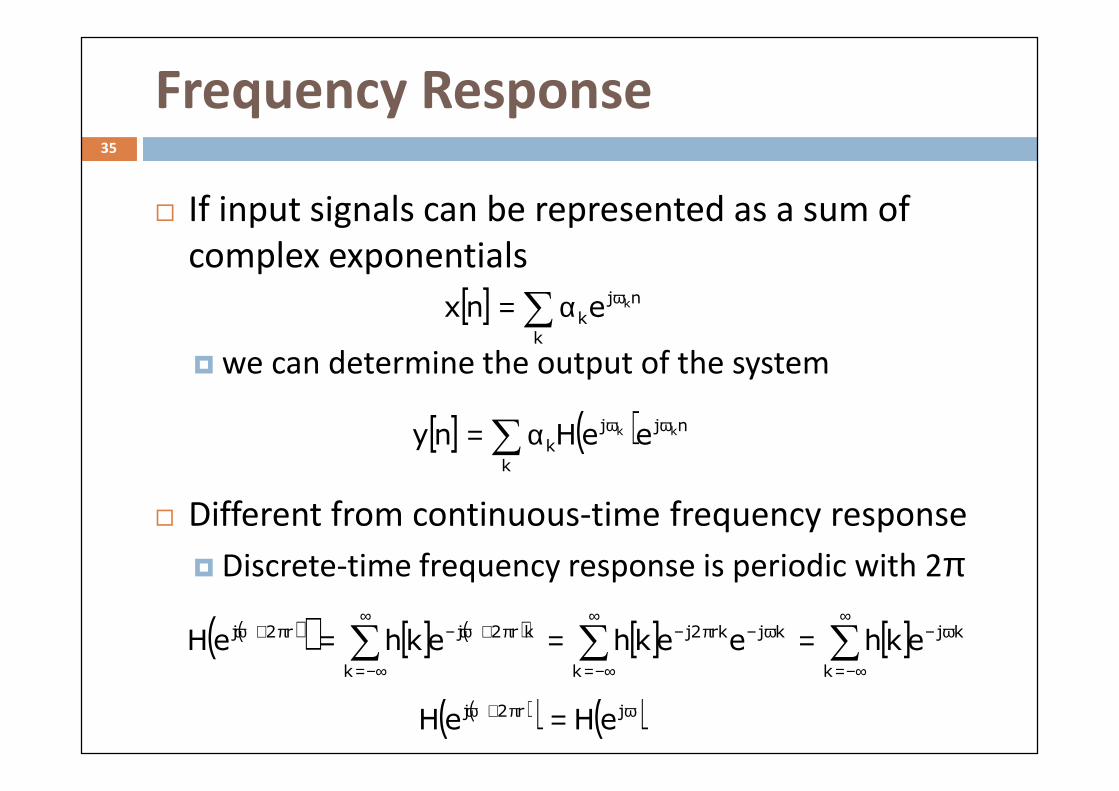
Frequency Response35
� If input signals can be represented as a sum of
complex exponentials
� we can determine the output of the system
� Different from continuous-time frequency response
� Discrete-time frequency response is periodic with 2π
[ ] ∑ ωα=k
nj
kkenx
[ ] ( )∑ ωωα=k
njj
kkk eeHny
( )( ) [ ] ( ) [ ] [ ] kj
k
kjrk2j
k
kr2j
k
r2j ekheekhekheH ω−∞
−∞=
ω−π−∞
−∞=
π+ω−∞
−∞=
π+ω ∑∑∑ ===
( )( ) ( )ωπ+ω = jr2j eHeH

Discrete-Time Fourier Transform36
� X(ejω) is the Fourier spectrum of the sequence x[n]
� It specifies the magnitude and phase of the sequence
� The phase wraps at 2π hence is not uniquely specified
� The frequency response of a LTI system is the DTFT of the impulse response
( ) [ ] transform) (forward enxeX nj
n
j ω−∞
−∞=
ω ∑=
[ ] ( ) transform) (inverse deeX2
1nx njj ω
π= ∫
π
π−
ωω
( ) [ ] [ ] ( ) ωπ
== ∫∑π
π−
ωωω−∞
−∞=
ω deeH2
1nh and ekheH njjkj
k
j

DTFT Pair37
( ) [ ] [ ] ( ) ωπ
== ∫∑π
π−
ωωω−∞
−∞=
ω deeX2
1nx and enxeX njjnj
n
j
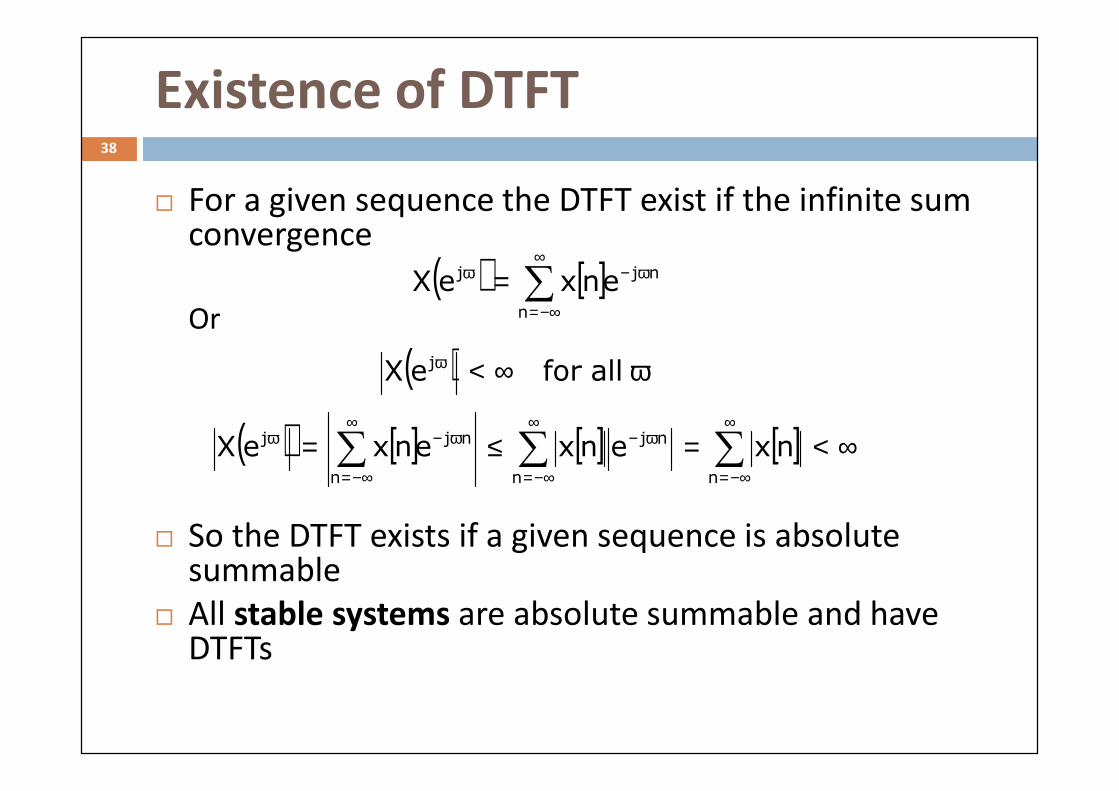
Existence of DTFT38
� For a given sequence the DTFT exist if the infinite sum convergence
Or
� So the DTFT exists if a given sequence is absolute summable
� All stable systems are absolute summable and have DTFTs
( ) [ ] nj
n
j enxeX ω−∞
−∞=
ω ∑=
( ) ω∞<ω allfor eX j
( ) [ ] [ ] [ ] ∞<=≤= ∑∑∑∞
−∞=
ω−∞
−∞=
ω−∞
−∞=
ω
n
nj
n
nj
n
j nxenxenxeX
DTFT Properties39

Symmetric Sequence and Functions40
Conjugate-symmetricConjugate-antisymmetric
Sequence
Function
[ ] [ ]nxnx *ee −= [ ] [ ]nxnx *
oo −−=
[ ] [ ] [ ]nxnxnx oe += [ ] [ ] [ ]( )nxnx2
1nx *
e −+= [ ] [ ] [ ]( )nxnx2
1nx *
o −−=
( ) ( )ω−ω = j*e
je eXeX ( ) ( )ω−ω −= j*
oj
o eXeX
( ) ( ) ( )ωωω += je
jo
j eXeXeX ( ) ( ) ( )[ ]ω−ωω += j*jje eXeX
2
1eX ( ) ( ) ( )[ ]ω−ωω −= j*jj
o eXeX2
1eX
References41
� D. Manolakis and V. Ingle, Applied Digital Signal
Processing, Cambridge University Press, 2011.
� Miki Lustig, EE123 Digital Signal Processing, Lecture
notes, Electrical Engineering and Computer Science,
UC Berkeley, CA, 2012. Available at:http://inst.eecs.berkeley.edu/~ee123/fa12/
� Güner Arslan, EE351M Digital Signal Processing,
Lecture notes, Dept. of Electrical and Computer
Engineering, The University of Texas at Austin, 2007.
Available at:www.ece.utexas.edu/~arslan/351m.html

42
Related Documents