Copyright ©1994-2012 by K. Pattipati ECE 6095/4121 Digital Control of Mechatronic Systems Lecture 1: Introduction & Mathematical Modeling Prof. Krishna R. Pattipati Prof. David L. Kleinman Dept. of Electrical and Computer Engineering University of Connecticut Contact: [email protected] (860) 486-2890

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Copyright ©1994-2012 by K. Pattipati
ECE 6095/4121
Digital Control of Mechatronic Systems
Lecture 1: Introduction &
Mathematical Modeling Prof. Krishna R. Pattipati
Prof. David L. Kleinman
Dept. of Electrical and Computer Engineering
University of Connecticut Contact: [email protected] (860) 486-2890
Copyright ©1994-2012 by K. Pattipati 2
Contact Information
– Room number: ITE 350
– Tel/Fax: (860) 486-2890/5585
– E-mail: [email protected]
Office Hours: Tuesday – Wednesday: 11:00-12:00 Noon
Very demanding course
– Homework every week and Design Projects (50%)
– Sensors and Actuators Presentation (10%)
– Class project (20%)
– Paper presentation (5%)
– Midterm – Take Home (15%)
Course Materials: http://huskyct.uconn.edu
Introduction

Copyright ©1994-2012 by K. Pattipati 3
Background Needed
Expected Background Knowledge (ECE 5101, ECE3111)
• Differential equations
• Continuous-time system modeling methods
– Transfer functions, state-space models (canonical forms, minimal
realizations)
– Controllability & Observability
– Transient response, especially for 2nd-order systems
• Stability theory for continuous-time systems
– Feedback, Routh-Hurwitz, Lyapunov Theory
• Graphical Tools
– Bode plot, Nyquist plot, Nichols Chart, and Root-locus
• Some basic knowledge of discrete-time systems
– Z-transforms, difference equations, and signal sampling
• Matrix theory and Linear Algebra
• Knowledge and use of MATLAB

Copyright ©1994-2012 by K. Pattipati 4
Mechatronic Systems Introduction & Overview
1. What is Mechatronics?
2. Elements of Mechatronics
3. Mechatronics Applications
4. Example of Mechatronics Systems
5. Mathematical Modeling of Mechatronic Systems
− Diesel Engine Driving a Pump
− Armature-controlled DC Motor
− Magnetic Levitation
− Inverted Pendulum
− Induction Motor Spray Painting in an Automotive Plant
6. Different Mathematical Representations of Systems

Copyright ©1994-2012 by K. Pattipati
What is Mechatronics? - 1
• The term “Mechatronics" was first coined by Tetsuro Mori, a senior engineer of
the Japanese company Yasakawa*, in 1969
− T. Mori, “Mechatronics,” Yasakawa Internal Trademark Application Memo, 21.131.01, July 12,
1969.
− R. Comerford, “Mecha … what?” IEEE Spectrum, 31(8), 46-49, 1994.
• Mechatronics refers to electro-mechanical systems and is centered on mechanics,
electronics, computing and control which, when combined, make possible the
generation of simpler, more economical, reliable and versatile systems
• Mechatronics is the synergistic integration of mechanical engineering, electronics
and intelligent computer control in design and manufacture of products and
processes
− F. Harshama, M. Tomizuka, and T. Fukuda, “Mechatronics-what is it, why, and how?-and
editorial,” IEEE/ASME Trans. on Mechatronics, 1(1), 1-4, 1996.
• Synergistic use of precision engineering, control theory, computer science, and
sensor and actuator technology to design improved products and processes.”
– S. Ashley, “Getting a hold on mechatronics,” Mechanical Engineering, 119(5), 1997.
* Makes servos, machine controllers, AC motor drives, switches and robots
5

Copyright ©1994-2012 by K. Pattipati
What is Mechatronics? - 2
• Field of study involving the analysis, design, synthesis, and selection of systems
that combine electronics and mechanical components with modern controls and
microprocessors.
− D. G. Alciatore and M. B. Histand, Introduction to Mechatronics and Measurement Systems, McGraw Hill, 1998.
− Good site for mechatronics: http://www.engr.colostate.edu/~dga/mechatronics/definitions.html
• Our working definition: Mechatronics is the synergistic integration of
sensors, actuators, signal conditioning, power electronics, decision and
control algorithms, and computer hardware and software to manage
complexity, uncertainty, and communication in engineered systems.
• An Embedded system, a component of mechatronics system, is a combination
of hardware and software designed to run on its own without human intervention,
and may be required to respond to events in real-time
• When these systems are networked, they are called Cyber-physical systems
− Numerous applications: Zero-accident highways, smart grid, smart buildings, tele-
operation rooms, aerospace and transportation, robotics and intelligent machines,…..
6
Copyright ©1994-2012 by K. Pattipati
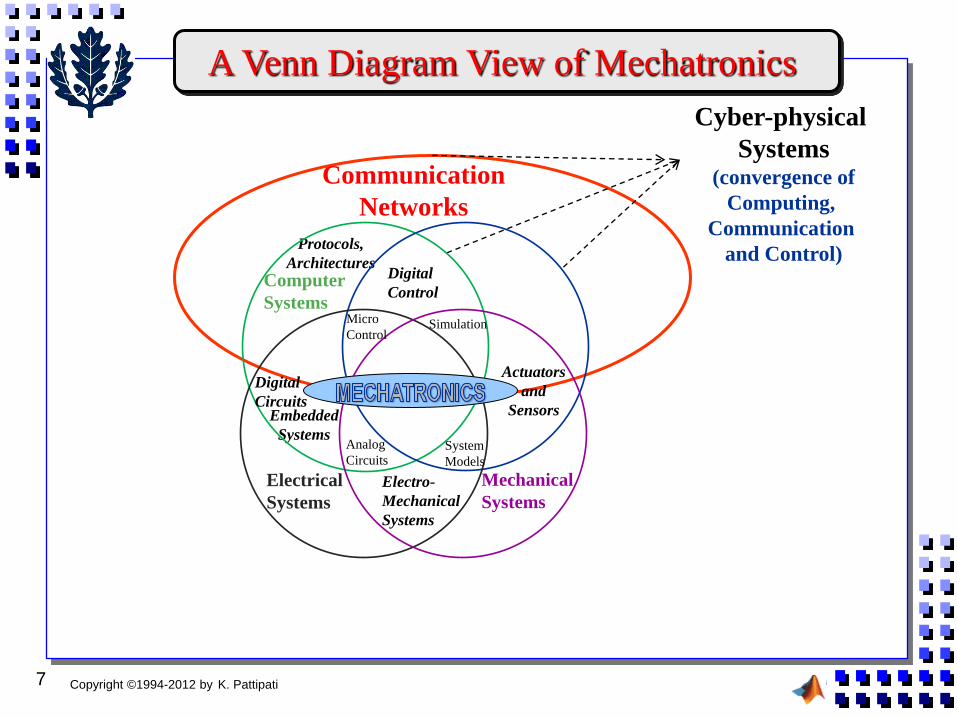
A Venn Diagram View of Mechatronics
Communication
Networks
Protocols,
Architectures
Cyber-physical
Systems (convergence of
Computing,
Communication
and Control)
Embedded
Systems
Computer
Systems Micro
Control Simulation
Analog
Circuits System
Models
Digital
Control
Electro-
Mechanical
Systems
Actuators
and
Sensors
Digital
Circuits
Electrical
Systems
Mechanical
Systems
7
Copyright ©1994-2012 by K. Pattipati
Mechatronics Applications
• Smart consumer products: home automation and security, microwave oven, toaster, dish washer, laundry washer-dryer, climate control,..
• Medical: implant-devices, assisted surgery, body area networks (BANs),..
• Defense: unmanned air, ground and undersea vehicles, smart munitions, jet engines,…
• Manufacturing: robotics, machines, processes, etc.
• Automotive: climate control, generation II antilock brake systems, active suspension, cruise control, air bags, engine management, safety, navigation, tele-operation, tele-diagnosis, backup collision sensing, rain sensing, etc.
• Cyber-physical Networked Systems: distributed robotics, tele-robotics, intelligent highways, smart grid, smart buildings, etc.
8
Copyright ©1994-2012 by K. Pattipati
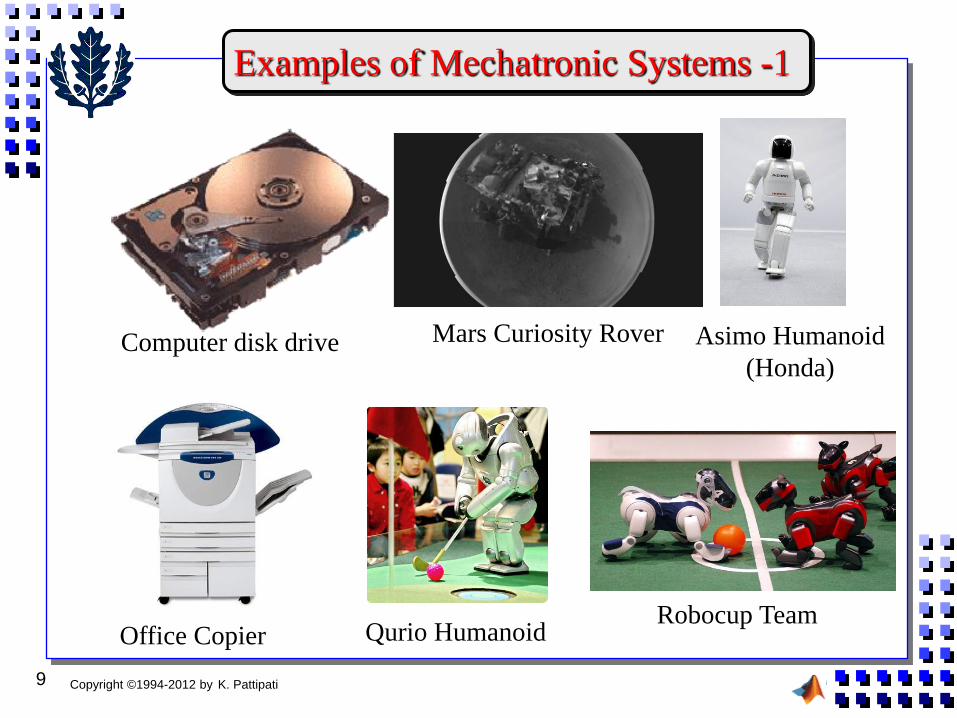
Examples of Mechatronic Systems -1
Computer disk drive Asimo Humanoid
(Honda)
Mars Curiosity Rover
Robocup Team Qurio Humanoid Office Copier
9

Copyright ©1994-2012 by K. Pattipati
Examples of Mechatronic Systems -2
Aviation Underwater Robot Flying UAV
Big Dog Robot HEXAPOD Robot Micro Robot
10
Copyright ©1994-2012 by K. Pattipati
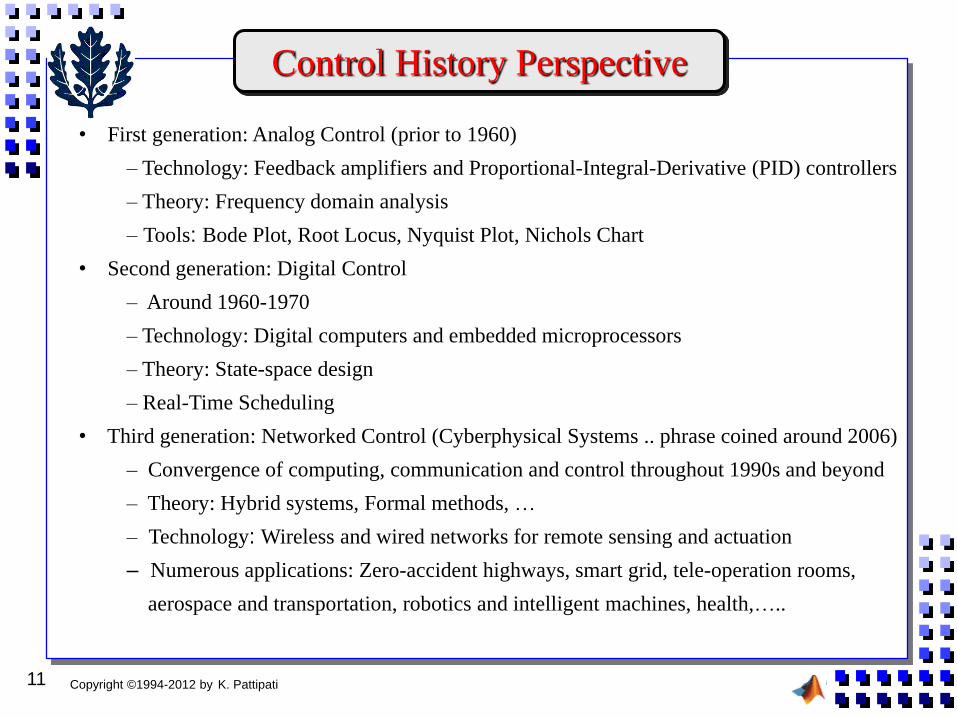
Control History Perspective
• First generation: Analog Control (prior to 1960)
– Technology: Feedback amplifiers and Proportional-Integral-Derivative (PID) controllers
– Theory: Frequency domain analysis
– Tools: Bode Plot, Root Locus, Nyquist Plot, Nichols Chart
• Second generation: Digital Control
– Around 1960-1970
– Technology: Digital computers and embedded microprocessors
– Theory: State-space design
– Real-Time Scheduling
• Third generation: Networked Control (Cyberphysical Systems .. phrase coined around 2006)
– Convergence of computing, communication and control throughout 1990s and beyond
– Theory: Hybrid systems, Formal methods, …
– Technology: Wireless and wired networks for remote sensing and actuation
– Numerous applications: Zero-accident highways, smart grid, tele-operation rooms,
aerospace and transportation, robotics and intelligent machines, health,…..
11

Copyright ©1994-2012 by K. Pattipati
Feedback Control System
12
Adapted from
Astrom & Murray, 2011
• Process = actuators + dynamic system + sensors
• Noise and external disturbances perturb the dynamics of the process
• Controller = pre-filter + A/D + computer + D/A+ system clock
• Operator input = reference signal (set point, desired input)

Copyright © 1994-2012 by K. Pattipati 13
Control System Design Process
A) Mathematical Model of System (Process) to be Controlled
MATH MODEL OF SYSTEM
PERFORMANCE MEASURES
CONTROL
DESIGN
EVALUATION &
SIMULATION OK?
NO B
C
YES
A
B) Performance Measures and Concerns
Mathematical criteria that are driven by customer's qualitative/quantittaive specifications
for behavior of the closed-loop (feedback) system
(1) Stability of the closed-loop system
(2) Steady-state accuracy, Integral absolute error (IAE), integral square error (ISE)
(3) Speed of response/transient
(4) Sensitivity/robustness
C) Evaluation and Simulation
− Computer-aided Engineering (CAE) software tools such as MATLAB/Simulink,LabVIEW
− Hardware-in-the-loop simulation
Focus of the course

Copyright ©2012 by K.R. Pattipati 14
Relationships among LTI Modeling Techniques
Transfer Functions
G(s)
Ordinary Differential
Equations (ODE)
State Variables
Signal Flow Graphs
sdt
d
• Physical Variables
• Standard Controllable form (SCF)
• Standard Observable form (SOF)
• Modal (Diagonal) form
DuxCy
BuxAx
DBAsICsG 1)()(
SCF, SOF
Modal
LTI: Linear Time-invariant
Useful for
Nonlinear
Systems
as well
(SFG as Simulink
Diagram. Mason’s
Rule not applicable)

Copyright ©2012 by K.R. Pattipati 15
Math Modeling involves Diverse Disciplines - 1
• Classic Book
− R. H. Cannon. Dynamics of Physical Systems. Dover, 2003 or McGraw-Hill, 1967.
• Mechanics
− V. I. Arnold. Mathematical Methods in Classical Mechanics. Springer, 1978.
− H. Goldstein. Classical Mechanics. Addison-Wesley, Cambridge, MA, 1953.
• Thermal
− H. S. Carslaw and J. C. Jaeger. Conduction of Heat in Solids. Clarendon Press,1959.
• Fluids
− J. F. Blackburn, G. Reethof, and J. L. Shearer. Fluid Power Control. MIT Press,1960.
• Vehicles
− M. A. Abkowitz. Stability and Motion Control of Ocean Vehicles. MIT Press, 1969.
− J. H. Blakelock. Automatic Control of Aircraft and Missiles. Addison-Wesley, 1991.
− J. R. Ellis. Vehicle Handling Dynamics. Mechanical Engineering Pubs., London,1994.
− U. Kiencke and L. Nielsen. Automotive Control Systems: For Engine, Driveline, and
Vehicle. Springer, Berlin, 2000.

Copyright ©2012 by K.R. Pattipati 16
Math Modeling involves Diverse Disciplines - 2
• Robotics
− M. W. Spong & M. Vidyasagar, Dynamics and Control of Robot Manipulators. Wiley, ‘89.
− R. M. Murray, Z. Li, and S. S. Sastry. A Mathematical Introduction to Robotic
Manipulation. CRC Press, 1994.
• Power Systems
− P. Kundur. Power System Stability and Control. McGraw-Hill, New York, 1993.
• Acoustics
− L. L. Beranek. Acoustics. McGraw-Hill, New York, 1954.
• Micromechanical Systems
− S. D. Senturia. Microsystem Design. Kluwer, Boston, MA, 2001.
• Biological Systems
− J. D. Murray. Mathematical Biology, Vols. I and II. Springer-Verlag, 2004.
− H. R. Wilson. Spikes, Decisions, and Actions: The Dynamical Foundations of
Neuroscience. Oxford University Press, Oxford, UK, 1999.

Copyright © 2012 by K.R. Pattipati 17
Force-Voltage Analogy for Translational Systems
dt
diLV
dt
dvMMaf
RiVdt
dxBBvf
dticc
qVdtvktkxf
1)(
Key Mechanical Elements:
• spring
• viscous damper
• mass
K
)(tx
)(tf
B
)(tx
)(tf
x
fM 1
capacitor spring
resistor damper
inductor mass
current velocity
chargeposition
voltage force
CK
RB
LM
iv
qx
Vf
Analogy
spring
damper
mass

Copyright © 2012 by K.R. Pattipati 18
Torque-Voltage Analogy for Rotational Systems
J
K
B
u(t)
input torque
,
dt
diLVJJT
RiVBBT
dtiCC
qVdtKKT
1
Analogy
C/1Capacitor Spring
ResistorDamper
Inductor inertia ofMoment
Current Velocity
Chargent Displaceme
VoltageTorque
K
RB
LJ
i
q
VT
Damper
Torsion Spring

Copyright © 2012 by K.R. Pattipati 19
Diesel Engine Driving a Pump
K
1
Electrical Analog
1
1
1
1B
2BJT System Equations
KTB
KKT
haveweTB
ceAlso
KT
TJJ
B
BJKBT
pumplocity of Angular ve
Tthe springTorque in
States
1
1
1
1
2
2111
,1
sin,
)(
1
)()(
,
,
:
Ty
KTB
KK
JJ
B
T
01
0
1
1
2
Input:
Output:
Draw Signal Flow Graph and Compute Transfer Function,
Steady state gain? System type?
1
2
1
Alternate States:
( , ) ( , )x
BK x
J
Kx x
B

Copyright © 2012 by K.R. Pattipati 20
Analysis of Engine Driving a Pump
2
1
2
1
0 0.25 0.5 0
20 4 20
10 101 0 ( ) 3.32; 0.64;
4.25 11 11n
B
J J
KT T K T TK
B
y G s dc gainT s s
2 2
1
2
20 . / ;
2 . / ;
5 . .sec/ ;
0.5 . .sec/
K N m rad
J kg m rad
B N m rad
B N m rad
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Step Response
Time (seconds)
Am
plit
ude
-60
-50
-40
-30
-20
-10
0
Magnitu
de (
dB
)
10-1
100
101
102
-180
-135
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (rad/s)

Copyright © 2012 by K.R. Pattipati
DC Motors
DC Motors convert DC energy into mechanical energy used in disk drives, robots, tape
transport mechanisms
Nice animation at:
− http://www.wisc-online.com/objects/ViewObject.aspx?ID=IAU13208
− http://www.wisc-online.com/objects/ViewObject.aspx?ID=IAU11508
− http://www.wisc-online.com/objects/ViewObject.aspx?ID=IAU13708
Torque of a DC motor:
− Field controlled: iA constant; iF controlled;
− Armature controlled: iF constant; iA controlled;
Three types of DC motors: series wound, shunt and compound
currentArmatureicurrentFieldiiKiT AFAFm ;;
FFm iKT
ATm iKT
21

Copyright © 2012 by K.R. Pattipati 22
Armature Controlled DC Motors (Fixed Field )
Fixed field is created by permanent magnets surrounding the armature
Applying an input voltage to the armature circuit causes a current in the coils of the
armature
This generates a magnetic field which is repelled by the permanent field causing
the motor to spin
The torque generated is proportional to the armature current
Modeling a DC Motor
Vi
RA LA
iA
)(tKv
Reverse voltage; opposes
input voltage Vi
)(tKv
Mechanical Action Armature
JM JL
BM
T =KTiA
motor load
Electro-mechanical system

Copyright © 2012 by K.R. Pattipati 23
TF of an Armature Controlled DC Motor
Modeling a DC Motor
Vi
RA LA
iA
)(tKv
Mechanical Action Armature
JM JL
BM
T =KTiA
motor load
Computing (s)/Vi(s)
)1()()()()(
)(
ssKsIsLsIRsV
tKdt
diLiRv
vAAAAi
vA
AAAi
Armature Equation:
)2()()(
)()()(
)()(
2
2
sK
Bss
K
JJsI
ssBsIKssJJ
tBiKtJJ
T
M
T
LMA
MATLM
MATLM
Mechanical Dynamics Equation:
Substitute (2) into (1) and solve for (s)/Vi(s)
VTMAMALMALMA
T
i KKBRsBLJJRsJJLs
K
sV
s
))(()()(
)(2

Copyright © 2012 by K.R. Pattipati 24
SS and SFG of an Armature Controlled DC Motor
A
v
A
AA
Ai
A
vA
AAAi
L
Kt
L
Ri
Lv
dt
di
tKdt
diLiRv
)(1
)(
Motor Equations:
LM
M
LM
TA
MATLM
JJ
Bt
JJ
Kit
tBiKtJJ
)()(
)()(
Declare states as 1 2 3, ,Ax i x x
State Space:
3
2
1
3
2
1
3
2
1
100
0
0
/1
010
0)/()/(
0//
x
x
x
y
v
L
x
x
x
JJBJJK
LKLR
x
x
x
i
A
LMMLMT
AvAA
vi y= 1/s 1/s 1/s
KT/(JM+JL)
-BM/(JM+JL)
-RA/LA
-KV/LA
1/LA 1
x1 x2 x3
SFG:
2
1 ; 0.001 ; 5 / ;
5 sec/ ; 20 / / sec;
( ) 1 . .sec /
A A T
v M
M L
R L H K N m A
K volt rad B kg m
J J N m rad

Copyright © 2012 by K.R. Pattipati 25
Steady-state Characteristics
m
f
A
f
i
fvT
AfATm
v
AAi
TKi
R
Ki
v
KiKK
iKiiKT
K
iRv
2
Steady-state Equations:
• Armature resistance, RA
• Field current (field flux), iF
• Armature voltage, vi
Speed Control Techniques:
10
0
0
0
S
m
A
if
S
f
im
T
T
R
vKiTtorquestalling
Ki
vspeedloadNoT
Torque
Speed
Maximum
Torque Ra increasing
Torque
Speed
Max.
Torque Field Current Decreasing
Trated Torque
Speed
Max.
Torque
Trated
Vi increasing
• good speed regulation
• maintains max. torque capability
• Slow transient response
• Does not maintain
max. torque capability
• Power loss in Ra
• Does not maintain
max. torque capability
• Poor speed regulation
4
2.
)1(
:
0max
0
0
s
sm
TP
atMax
TTP
powerMax

Copyright © 2012 by K.R. Pattipati
Magnetic Levitation - 1
Nonlinear System Equations
2
0 05
tan
0 0001
tan 0 01
Re tan 1
M Mass of Ball . kg
h Dis ce of Ball from Magnet
K Coefficient in N - m / Amp .
L Induc ce in H . H
R si ce in Ω Ω
V
i
1B
RL
M
g
h
2
2
iMh Mg K
h
diV L Ri
dt
1 2 3
2
31 2 2
1
3 3
; ;
;
1
x h x h x i
xKx x x g
M x
Rx x V
L L
1
1 0 3 0 0
2 2
03 0
0 0
Linearize around equilibrium
point:
e
e e
e
x h x i V
Mgx Mghx i
K K
V Ri
:IR sensor measurement
y ah b
Adapted from
Murray, 2004
See Kuo’s Book
Copyright © 2012 by K.R. Pattipati
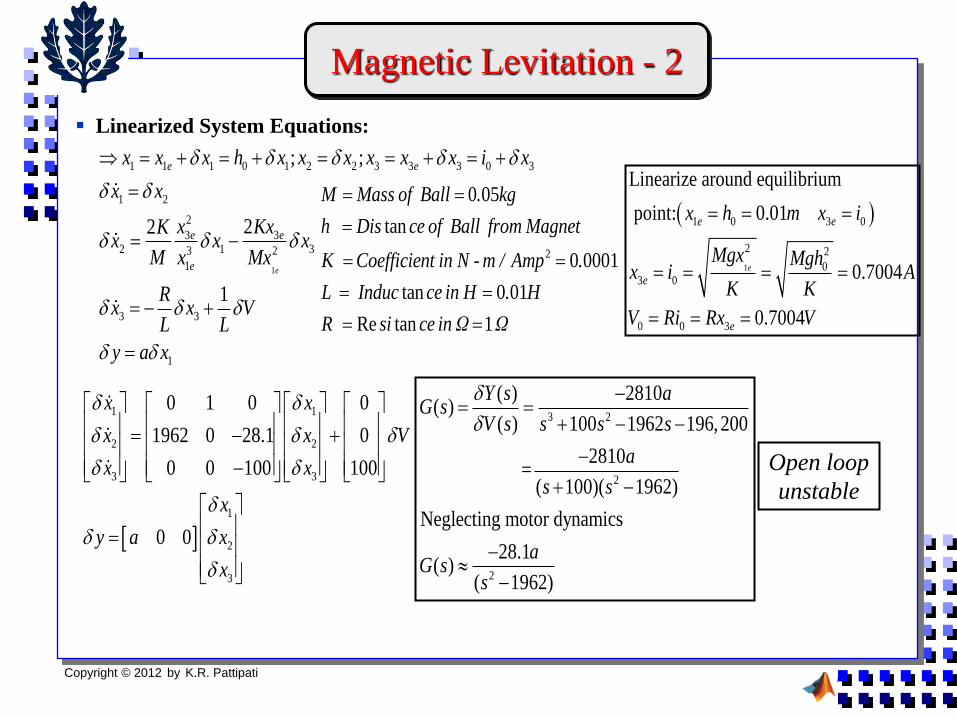
Magnetic Levitation - 2
Linearized System Equations:
1
1 1 1 0 1 2 2 3 3 3 0 3
1 2
2
3 32 1 33 2
1
3 3
1
; ;
22
1
e
e e
e e
e
x x x h x x x x x x i x
x x
x KxKx x x
M x Mx
Rx x V
L L
y a x
1
1 0 3 0
2 2
03 0
0 0 3
Linearize around equilibrium
point: 0.01
0.7004
0.7004
e
e e
e
e
x h m x i
Mgx Mghx i A
K K
V Ri Rx V
2
0 05
tan
0 0001
tan 0 01
Re tan 1
M Mass of Ball . kg
h Dis ce of Ball from Magnet
K Coefficient in N - m / Amp .
L Induc ce in H . H
R si ce in Ω Ω
1 1
2 2
3 3
1
2
3
0 1 0 0
1962 0 28.1 0
0 0 100 100
0 0
x x
x x V
x x
x
y a x
x
3 2
2
2
( ) 2810( )
( ) 100 1962 196,200
2810 =
( 100)( 1962)
Neglecting motor dynamics
28.1( )
( 1962)
Y s aG s
V s s s s
a
s s
aG s
s
Open loop
unstable
Copyright © 2012 by K.R. Pattipati
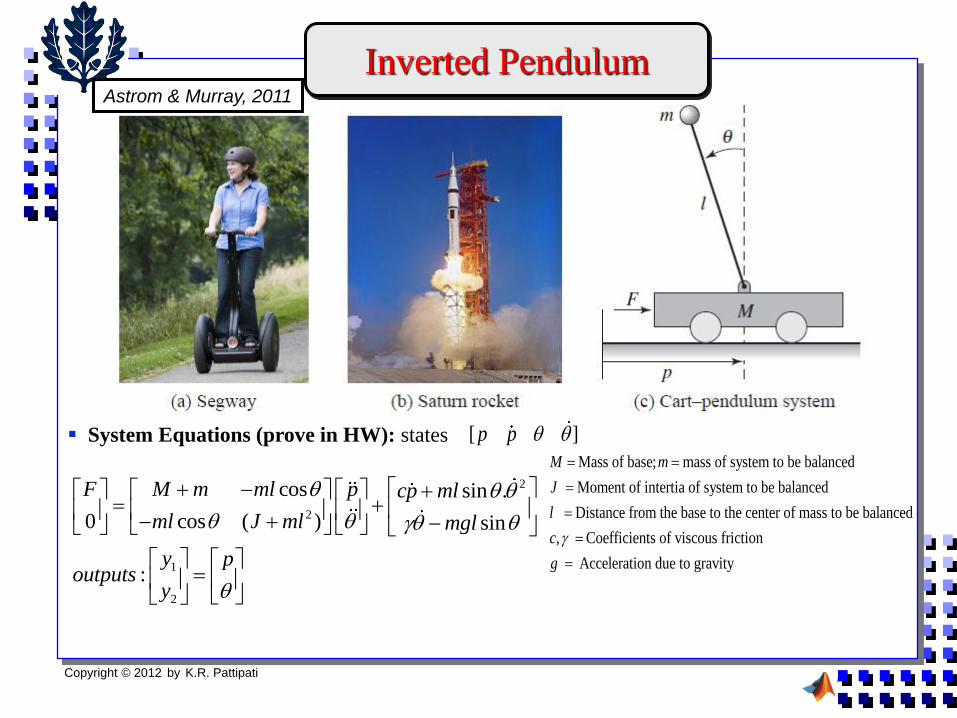
Inverted Pendulum
System Equations (prove in HW): states
2
2
1
2
cos sin .
0 cos ( ) sin
:
F M m ml p cp ml
ml J ml mgl
y poutputs
y
Mass of base; mass of system to be balanced
Moment of intertia of system to be balanced
Distance from the base to the center of mass to be balanced
, Coefficients of viscous friction
M m
J
l
c
g
Acceleration due to gravity
[ ]p p
Astrom & Murray, 2011
Copyright © 2012 by K.R. Pattipati
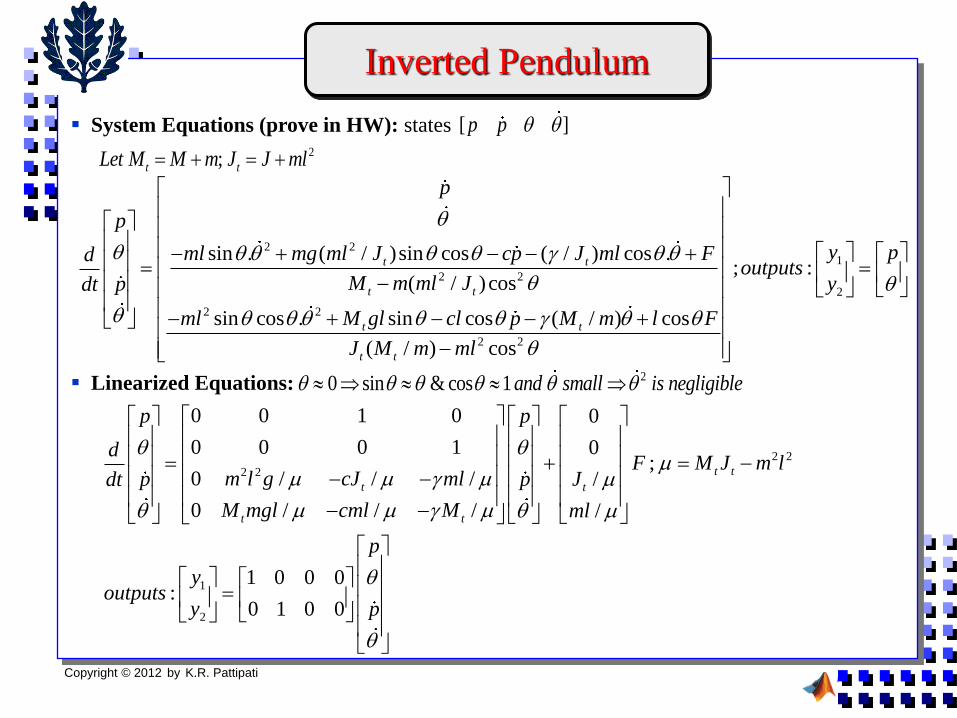
Inverted Pendulum
System Equations (prove in HW): states [ ]p p
2 21
2 2
2
2 2
2 2
sin . ( / )sin cos ( / ) cos .; :
( / ) cos
sin cos . sin cos ( / ) cos
( / ) cos
t t
t t
t t
t t
p
p
yml mg ml J cp J ml Fdoutputs
M m ml J ypdt
ml M gl cl p M m l F
J M m ml
p
2;t tLet M M m J J ml
2 2
2 2
1
2
0 0 1 0 0
0 0 0 1 0;
0 / / / /
0 / / / /
1 0 0 0:
0 1 0 0
t t
t t
t t
p p
dF M J m l
m l g cJ mlp p Jdt
M mgl cml M ml
p
youtputs
y p
Linearized Equations: 20 sin & cos 1and small is negligible

Copyright © 2012 by K.R. Pattipati 30
Spray Painting in an Automotive Plant -1
System Equations
• Inputs: Motor Torque, Tm is a function of line frequency, 0; Source voltage, v and
Motor speed, m (which is a state variable) There is inherent feedback already!
• Output: Pump speed, p
• Is the system linear? No, because Tm is a nonlinear function of {0, v and m}
• How to get state equations? Gears are not perfect; They have efficiency, < 1.
• How to get induction motor torque, Tm?
r : Gear Speed Ratio

Copyright © 2012 by K.R. Pattipati 31
Spray Painting in an Automotive Plant -1
System Equations
r : Gear Speed Ratio
r < 1 if p < m
Torque scales by 1/r
Electrical Analog
Electrical Analog
p
pb
mT
rTp
mmb
mJ
pT
pk
1
mr pJ
pmr
p
p
p
p
p
pppppp
ppmppmpp
m
m
p
m
m
m
mm
mpmmmm
ppm
TJJ
bbJT
krkrkT
TJ
TJ
r
J
b
TTr
bJ
TStates
1)3(
)()2(
1
)1(
,,:
Tm = Nonlinear f(0, v, m)
p= r m in steady state
supply radian frequency
supply voltage
Copyright © 2012 by K.R. Pattipati 32
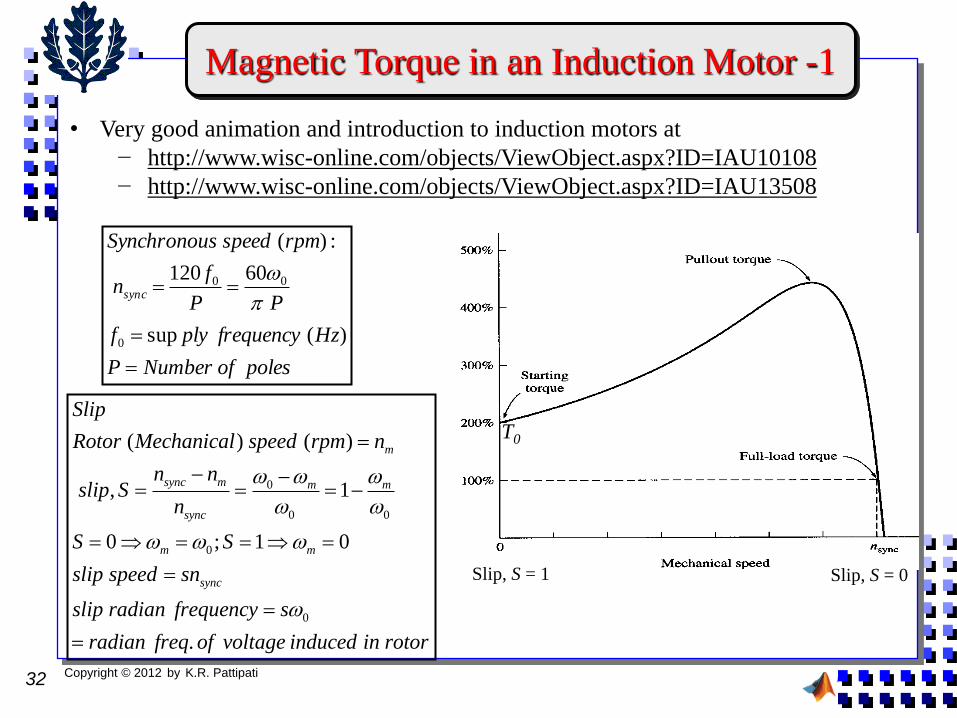
Magnetic Torque in an Induction Motor -1
polesofNumberP
Hzfrequencyplyf
PP
fn
rpmspeedsSynchronou
sync
)(sup
60120
:)(
0
00
• Very good animation and introduction to induction motors at
− http://www.wisc-online.com/objects/ViewObject.aspx?ID=IAU10108
− http://www.wisc-online.com/objects/ViewObject.aspx?ID=IAU13508
Slip, S = 0 Slip, S = 1
0
0 0
0
0
( ) ( )
, 1
0 ; 1 0
.
m
sync m m m
sync
m m
sync
Slip
Rotor Mechanical speed rpm n
n nslip S
n
S S
slip speed sn
slip radian frequency s
radian freq of voltage induced in rotor
T0

Copyright © 2012 by K.R. Pattipati 33
Magnetic Torque in an Induction Motor - 2
• Equivalent circuit of an induction motor. Assume 3 phases − Similar to a transformer except that the secondary windings rotate
− Frequency of voltage induced in the rotor is s0
− Voltage at s=0 is zero (no torque), Maximum at s=1
− ER0 = E1 NR / NS = E1 /aeff; ER = s ER0
stator
air gap
rotor
Equivalent circuit
Rotor Equivalent circuit
0
0
0
0
RR
R
RR
RR
jXs
R
E
jsXR
sEI
Rotor Equivalent circuit
2
2 0
2
2
2
1 0
eff R
eff R
R
eff
eff R
Seff
R
X a X
R a R
II
a
E a E
Na
N

Copyright © 2012 by K.R. Pattipati 34
Magnetic Torque in an Induction Motor - 3
• Final Equivalent circuit of an induction motor. Assume 3 phases
Actual rotor resistance
Resistance equivalent to
mechanical load
2
0
2
22
0
000
2
2
2
20
2
2
10
2
2
2
2
2
0
2
2
2
2
2
2
2
2
2
02
2
22
20
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2)(3
13)1(3
,
)1(3,
mmm
m
mmSm
q
m
m
mmm
m
thatsuchSsmallforq
qTT
XR
RVTTwhere
SX
R
qST
SX
R
X
RS
TTXSR
SRVPT
XS
RS
SRVP
XS
R
VIimpedancestatorNeglecting
S
SRIPPowerMechanical
So, induction motors can be controlled by
varying 20, RorV

Copyright © 2012 by K.R. Pattipati 35
Steady-state Operating Point & Linearization
• Steady-state operating point
• State equations in matrix form
)(
)(;;
00
22
0
2
0
22
0
000
2
m
mmp
m
m
mm
p
mmmpppp
q
qbr
b
T
q
qT
brbTrbT
p
p
m
m
m
p
p
m
ppp
pp
mmm
p
p
m
Ty
T
J
T
JbJ
KrK
JrJb
T
100
0
0
/1
//10
0
0//
Nonlinearity enters only through Tm !
Copyright © 2012 by K.R. Pattipati 36
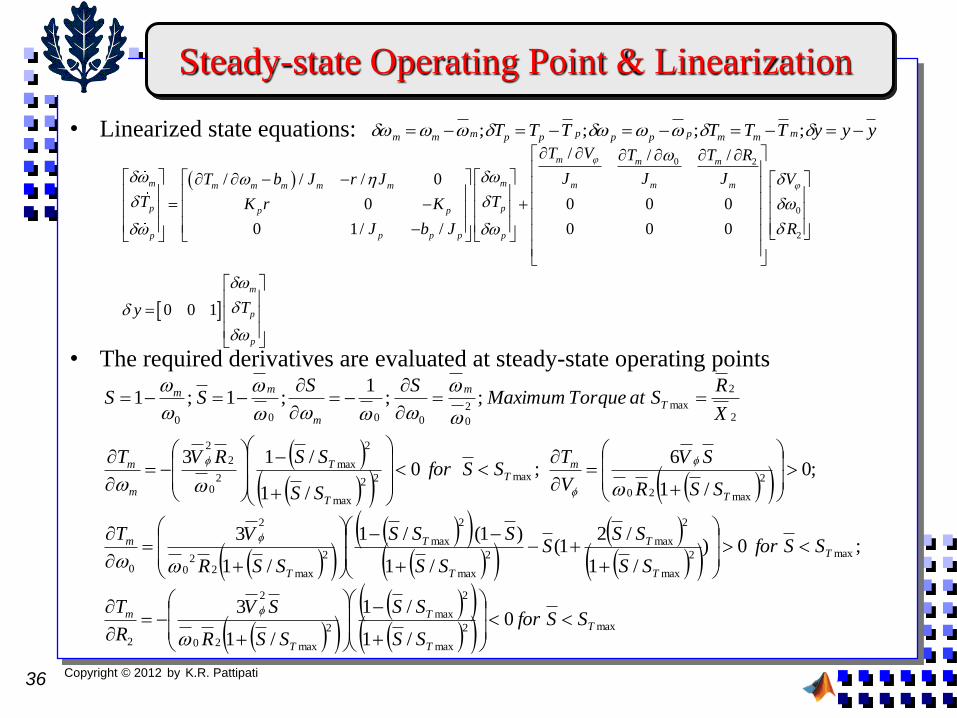
Steady-state Operating Point & Linearization
• Linearized state equations:
• The required derivatives are evaluated at steady-state operating points
yyyTTTTTT mmmppppppmmm ;;;;
0 2
0
2
/ / /
/ / / 0
0 0 0 0
0 1/ / 0 0 0
0 0 1
m m m
m m m m mm m m m m
p pp p
p p pp p
m
p
p
T V T T R
J J JT b J r J V
T TK r K
J b J R
Ty
max2
max
2
max
2
max20
2
2
max2
max
2
max
2
max
2
max
2
max22
0
2
0
2
max20
max22
max
2
max
20
2
2
2
2
max2
00000
0/1
/1
/1
3
;0)/1
/21(
/1
)1(/1
/1
3
;0/1
6;0
/1
/13
;;1
;1;1
T
T
T
T
m
T
T
T
T
T
T
m
T
mT
T
T
m
m
T
m
m
mm
SSforSS
SS
SSR
SV
R
T
SSforSS
SSS
SS
SSS
SSR
VT
SSR
SV
V
TSSfor
SS
SSRVT
X
RSatTorqueMaximum
SSSS

Copyright © 2012 by K.R. Pattipati 37
• We consider n state (x), m input (u), p output (y) systems (vectors are columns)
• The system dynamics are continuous, not discrete.
( , ); 0 initial stat
(1.1
e
, )(
x t f x t u t x
y t g x t u t
1 1 1
; ;
n m p
x t u t y t
x t u t y t
x t u t y t
(a) Linearized state space model
System matrix
Control matrix
Output matrix
I/O coupling matrix
A n n
B n m
C p n
D p m
• Multivariable LTI: linear and time-invariant Superposition and constant parameter
systems
;
(1.2)
[ ] [ ]; [ ] [ ]
; [ ] [ ]; [ ] [ ]
i iij ij
j j
i iij ij
j j
f fx t A x t B u t A a B b
x u
g gy t C x t D u t C c D d
x u
Math. Representation of (Sub)system Dynamics - 1

Copyright © 2012 by K.R. Pattipati 38
Math. Representation of (Sub)system Dynamics - 2
(b) Transfer function representation
1 1
1
0;
Laplace transform variable
( ) ( ) ( ) ( ) [ ( ) ] ( ) ( ) ( )
( ) ( ) ( ); 1,2,..,
( ) [ ( )] ( )
( )( ) |
(
(1.3)
) i
m
k kj j
j
kj
kkj u i
j
s
x s sI A B u s y s C sI A B D u s G s u s
y s g s u s k p
G s g s pby m transfer function matrix TFM
y sg s
u s
j
1
1; 1
1; 1
1; 1
m p SISO
m p SIMO
m p MISO
m p MIMO
(c) Impulse response representation
( )
0 0 0
( ) [Im Re ] [ ( )]
0; 0( )
( );
(
0
:
( ) ( ) ( ) ( ) ( 1.( 4) ) ( ) )
At
t t tA t
G s L pulse sponse L G t
tG t
Ce B D t t
Convolution Integral Formula
y t G t u d G u t d C e B u d D u t

Copyright © 2012 by K.R. Pattipati
(d) Variation 1: Disturbances, d and Measurement noise, v
(
( )
( ) ( ) = ( ) ( ) ( ) ( ) ( ) 1.5)
d
d d
x t Ax t Bu t B d t
y t Cx t Du t D d t v t y s G s u s G s d s v s
(e) Variation 2: Descriptor representation
1 (1 = ( ) ( ) [ ( ) ] ( ) .6)
Ex t Ax t Bu t
y t Cx t Du t
y s G s u s C sE A B D u s
Math. Representation of (Sub)system Dynamics - 3
39

Copyright © 2012 by K.R. Pattipati 40
Summary
1. What is Mechatronics?
2. Elements of Mechatronics
3. Mechatronics Applications
4. Example of Mechatronics Systems
5. Mathematical Modeling of Mechatronic Systems
6. General Representation of Systems
Related Documents










