Sistemas de Control Automáticos Página 1 Unidad I: Variable y Componentes 1) Introducción El control automático es el estudio de los modelos matemáticos de sistemas dinámicos, sus propiedades y el cómo modificar éstas mediante el uso de otro sistema dinámico llamado controlador. El ser humano utiliza constantemente sistemas de control en su vida cotidiana, como en su vista, en su caminar, al conducir un automóvil, al regular la temperatura de su cuerpo y otros. De igual manera, en el mundo tecnológico constantemente se utilizan sistemas de control. Los conocimientos de esta disciplina se aplican para controlar procesos químicos, todo tipo de maquinaria industrial, vehículos terrestres y aeroespaciales, robots industriales, plantas generatrices de electricidad y otros. El Control Automático juega un papel fundamental en los sistemas y procesos tecnológicos modernos. Los beneficios que se obtienen con un buen control son enormes. Estos beneficios incluyen productos de mejor calidad, menor consumo de energía, minimización de desechos, mayores niveles de seguridad y reducción de la polución. Es evidente que el especialista en control automático puede contribuir significativamente en diversas áreas de la tecnología moderna. El área de mayor impacto en la actualidad es la de automatización de procesos de manufactura. El control ha evolucionado desde básicos sistemas mecánicos, hasta modernos controladores digitales. En un principio, los sistemas de control se reducían prácticamente a reacciones; éstas eran provocadas mediante contrapesos, poleas, fluidos, etc. A principios del siglo pasado, se comenzó el trabajo con modelos matemáticos más estrictos para realizar el control automático. Se inició por ecuaciones diferenciales; a mediados de siglo, surgió el análisis de la respuesta en frecuencia y lugar geométrico de las raíces. Con el surgimiento de sistemas digitales que posibilitan el análisis en el dominio del tiempo, los sistemas de control moderno se basaron en éste y las variables de estado. Surgió en el último cuarto del siglo XX el control difuso, basado en la lógica difusa y toma de decisiones. El control difuso posee técnicamente la capacidad de tomar decisiones imitando el comportamiento humano y no basándose en estrictos modelos matemáticos. En la actualidad la automática se concibe como la construcción de autómatas, máquinas a las que considera dotadas de una “vida” en relación con el entorno que las rodea. 2) Sistema de Control Sistema es un ensamblaje de componentes que proporcionan acciones interrelacionadas entre si, los cuales se caracterizan por poseer parámetros inherentes que los definen y por mostrar condiciones físicas asociadas. A los parámetros de cada elemento se les denomina parámetros del sistema y las condiciones físicas de cada componente cambiantes con el tiempo determinan el estado del sistema en cada momento y se les denominan variables del sistema.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Sistemas de Control Automáticos
Página 1
Unidad I: Variable y Componentes
1) Introducción
El control automático es el estudio de los modelos matemáticos de sistemas dinámicos, sus
propiedades y el cómo modificar éstas mediante el uso de otro sistema dinámico llamado
controlador. El ser humano utiliza constantemente sistemas de control en su vida cotidiana, como
en su vista, en su caminar, al conducir un automóvil, al regular la temperatura de su cuerpo y
otros. De igual manera, en el mundo tecnológico constantemente se utilizan sistemas de control.
Los conocimientos de esta disciplina se aplican para controlar procesos químicos, todo tipo de
maquinaria industrial, vehículos terrestres y aeroespaciales, robots industriales, plantas
generatrices de electricidad y otros.
El Control Automático juega un papel fundamental en los sistemas y procesos tecnológicos
modernos. Los beneficios que se obtienen con un buen control son enormes. Estos beneficios
incluyen productos de mejor calidad, menor consumo de energía, minimización de desechos,
mayores niveles de seguridad y reducción de la polución. Es evidente que el especialista en control
automático puede contribuir significativamente en diversas áreas de la tecnología moderna. El
área de mayor impacto en la actualidad es la de automatización de procesos de manufactura.
El control ha evolucionado desde básicos sistemas mecánicos, hasta modernos controladores
digitales. En un principio, los sistemas de control se reducían prácticamente a reacciones; éstas
eran provocadas mediante contrapesos, poleas, fluidos, etc. A principios del siglo pasado, se
comenzó el trabajo con modelos matemáticos más estrictos para realizar el control automático. Se
inició por ecuaciones diferenciales; a mediados de siglo, surgió el análisis de la respuesta en
frecuencia y lugar geométrico de las raíces. Con el surgimiento de sistemas digitales que
posibilitan el análisis en el dominio del tiempo, los sistemas de control moderno se basaron en
éste y las variables de estado. Surgió en el último cuarto del siglo XX el control difuso, basado en la
lógica difusa y toma de decisiones. El control difuso posee técnicamente la capacidad de tomar
decisiones imitando el comportamiento humano y no basándose en estrictos modelos
matemáticos. En la actualidad la automática se concibe como la construcción de autómatas,
máquinas a las que considera dotadas de una “vida” en relación con el entorno que las rodea.
2) Sistema de Control
Sistema es un ensamblaje de componentes que proporcionan acciones interrelacionadas entre si,
los cuales se caracterizan por poseer parámetros inherentes que los definen y por mostrar
condiciones físicas asociadas. A los parámetros de cada elemento se les denomina parámetros del
sistema y las condiciones físicas de cada componente cambiantes con el tiempo determinan el
estado del sistema en cada momento y se les denominan variables del sistema.
Sistemas de Control Automáticos
Página 2
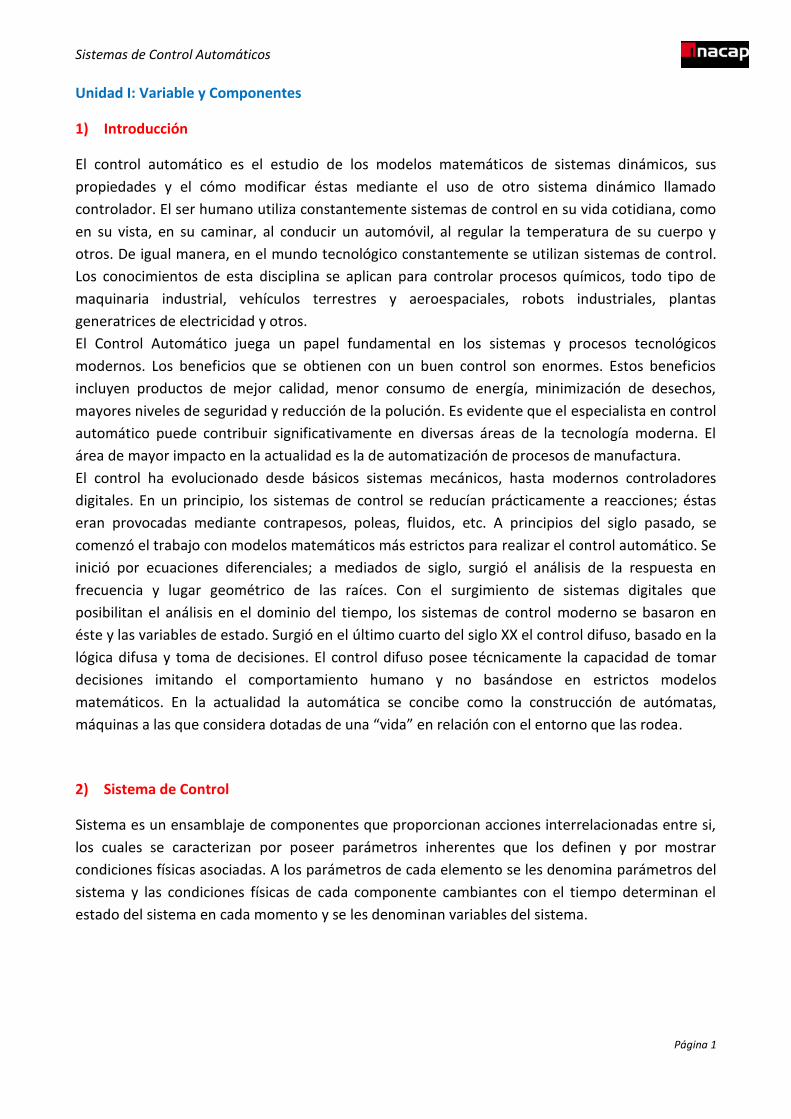
Fig. 1 Representación de un sistema
Variables:
a) Variables de proceso (VP): Son aquellas que evolucionan en el tiempo. Ej. Temperatura,
presión, flujo, densidad.
b) Variables controladas (VC): Son aquellas que deben de mantenerse en rangos de variación
acotados, con el fin de que los productos cumplan determinadas normas de calidad,
cantidad, costos, etc. Ej. Temperatura de un combustible, presión de aire, etc.
c) Variable de Referencia (SP): También conocido como set point, corresponde al valor en
que se debe manejar la variable controlada.
d) Variables manipuladas: Son aquellas que pueden variarse con el fin de mantener las
variables controladas en rangos predefinidos. Ej. Flujo de aire.
e) Error (E): Corresponde a la diferencia entre la variable controlada y el valor de referencia.
Éste se utiliza para efectos del control del sistema.
f) Perturbaciones (L): Son variables que evolucionan en el tiempo en forma independiente.
Los efectos transitorios, aunque desaparecen con el tiempo pueden generar serios
problemas operacionales. Ej. Rebalses, sobrecargas, etc.
Componentes
a) Medición: Es el dispositivo que mide automáticamente una variable de proceso sobre la
base de principios físicos o químicos, generando una señal neumática, electrónica o digital
que sigue la evolución en el tiempo de la variable medida. Ej. Sensor de temperatura,
sensor de nivel, etc. El sistema de medición está formado por:
SENSOR: Transforma una variable física en otra variable física.
ACONDICIONADOR: Transforma la señal amplificándola y/o digitalizándola.
VISUALIZADOR: Es el dispositivo donde se presentan los resultados el que puede
ser un display, un dispositivo mecánico, etc.
Sistemas de Control Automáticos
Página 3
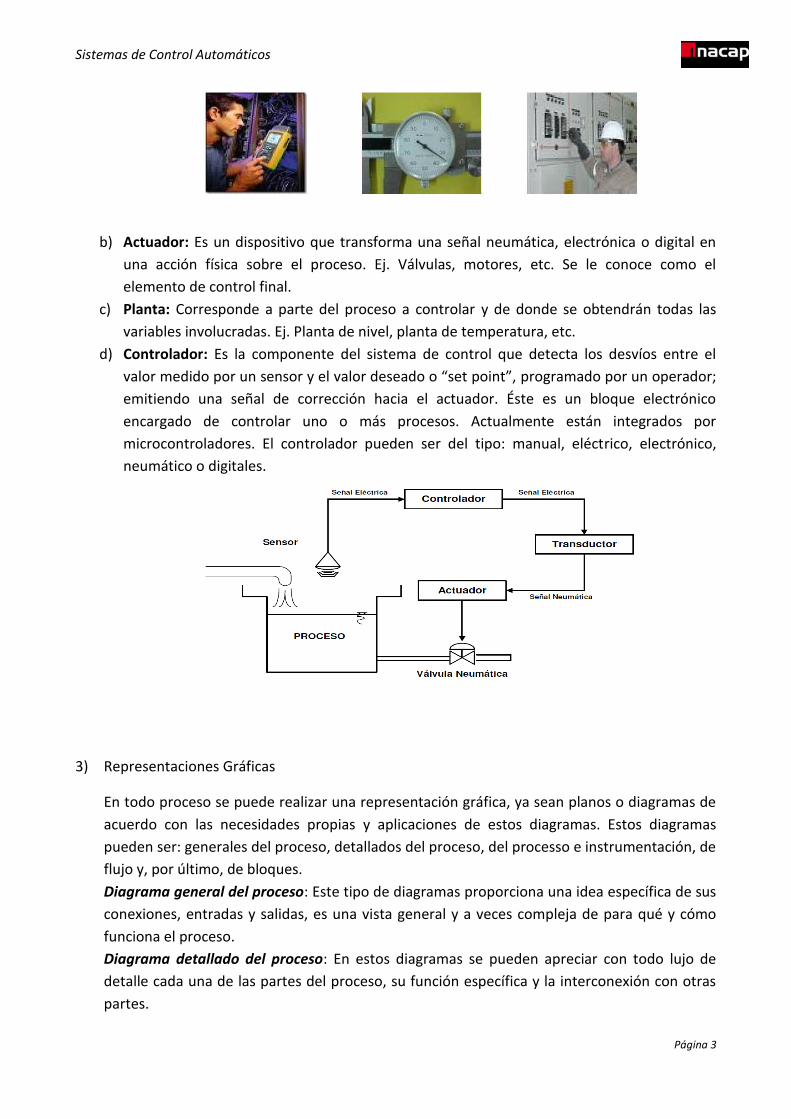
b) Actuador: Es un dispositivo que transforma una señal neumática, electrónica o digital en
una acción física sobre el proceso. Ej. Válvulas, motores, etc. Se le conoce como el
elemento de control final.
c) Planta: Corresponde a parte del proceso a controlar y de donde se obtendrán todas las
variables involucradas. Ej. Planta de nivel, planta de temperatura, etc.
d) Controlador: Es la componente del sistema de control que detecta los desvíos entre el
valor medido por un sensor y el valor deseado o “set point”, programado por un operador;
emitiendo una señal de corrección hacia el actuador. Éste es un bloque electrónico
encargado de controlar uno o más procesos. Actualmente están integrados por
microcontroladores. El controlador pueden ser del tipo: manual, eléctrico, electrónico,
neumático o digitales.
3) Representaciones Gráficas
En todo proceso se puede realizar una representación gráfica, ya sean planos o diagramas de
acuerdo con las necesidades propias y aplicaciones de estos diagramas. Estos diagramas
pueden ser: generales del proceso, detallados del proceso, del processo e instrumentación, de
flujo y, por último, de bloques.
Diagrama general del proceso: Este tipo de diagramas proporciona una idea específica de sus
conexiones, entradas y salidas, es una vista general y a veces compleja de para qué y cómo
funciona el proceso.
Diagrama detallado del proceso: En estos diagramas se pueden apreciar con todo lujo de
detalle cada una de las partes del proceso, su función específica y la interconexión con otras
partes.
Sistemas de Control Automáticos
Página 4
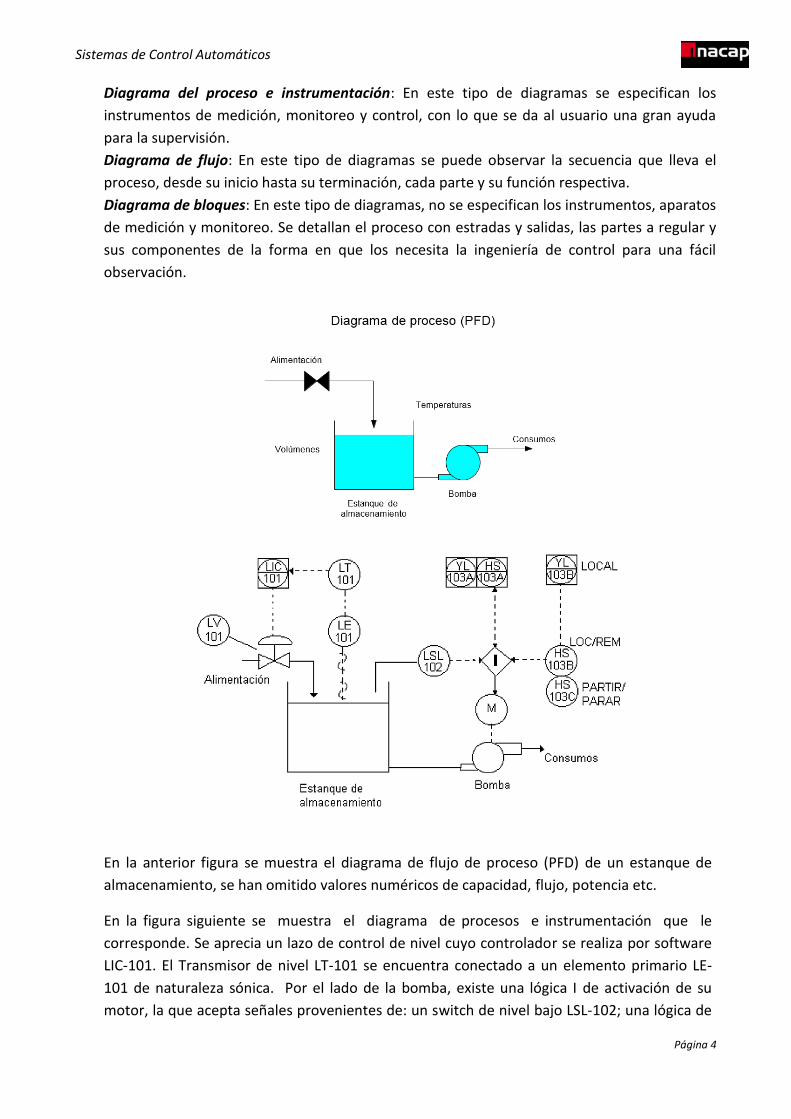
Diagrama del proceso e instrumentación: En este tipo de diagramas se especifican los
instrumentos de medición, monitoreo y control, con lo que se da al usuario una gran ayuda
para la supervisión.
Diagrama de flujo: En este tipo de diagramas se puede observar la secuencia que lleva el
proceso, desde su inicio hasta su terminación, cada parte y su función respectiva.
Diagrama de bloques: En este tipo de diagramas, no se especifican los instrumentos, aparatos
de medición y monitoreo. Se detallan el proceso con estradas y salidas, las partes a regular y
sus componentes de la forma en que los necesita la ingeniería de control para una fácil
observación.
En la anterior figura se muestra el diagrama de flujo de proceso (PFD) de un estanque de
almacenamiento, se han omitido valores numéricos de capacidad, flujo, potencia etc.
En la figura siguiente se muestra el diagrama de procesos e instrumentación que le
corresponde. Se aprecia un lazo de control de nivel cuyo controlador se realiza por software
LIC-101. El Transmisor de nivel LT-101 se encuentra conectado a un elemento primario LE-
101 de naturaleza sónica. Por el lado de la bomba, existe una lógica I de activación de su
motor, la que acepta señales provenientes de: un switch de nivel bajo LSL-102; una lógica de
Sistemas de Control Automáticos
Página 5
mando local YL-103B; una lógica de mando remota YL-103A. Se observa la presencia de
switchs: para definir el funcionamiento remoto/local HS-103B: y de partida/parada HS-103C.
4) Sistema de Control Clásico
Existen diversas estrategias de control como; Control de lazo abierto (open loop control),
Control con retroalimentación (Feedback), Control en cascada, Control de relación (Ratio
control) y Control Predictivo. También se puede encontrar sistemas de control con múltiples
lazos los cuales envuelven más de una variable controlada. Estos sistemas se diseñan para
satisfacer necesidades especiales de un proceso y su comprensión es básica para entender los
sistemas complejos de control, destinados a satisfacer sus requerimientos.
5) Lazos de Control
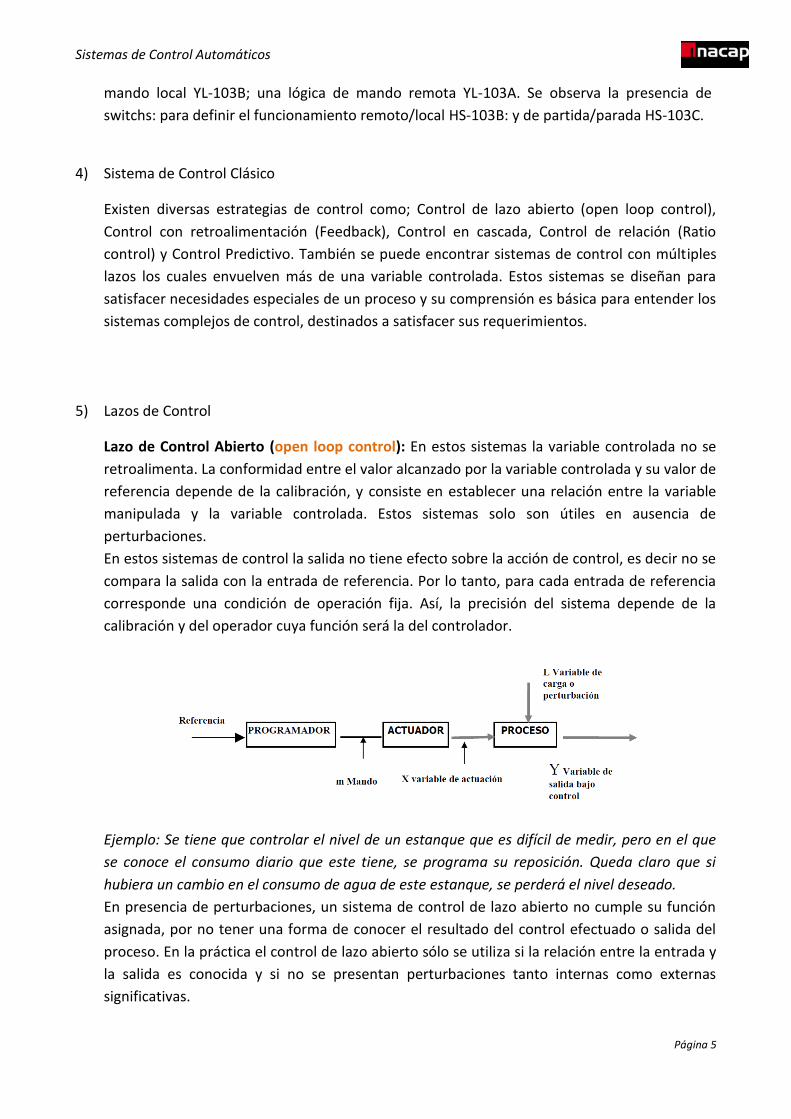
Lazo de Control Abierto (open loop control): En estos sistemas la variable controlada no se
retroalimenta. La conformidad entre el valor alcanzado por la variable controlada y su valor de
referencia depende de la calibración, y consiste en establecer una relación entre la variable
manipulada y la variable controlada. Estos sistemas solo son útiles en ausencia de
perturbaciones.
En estos sistemas de control la salida no tiene efecto sobre la acción de control, es decir no se
compara la salida con la entrada de referencia. Por lo tanto, para cada entrada de referencia
corresponde una condición de operación fija. Así, la precisión del sistema depende de la
calibración y del operador cuya función será la del controlador.
Ejemplo: Se tiene que controlar el nivel de un estanque que es difícil de medir, pero en el que
se conoce el consumo diario que este tiene, se programa su reposición. Queda claro que si
hubiera un cambio en el consumo de agua de este estanque, se perderá el nivel deseado.
En presencia de perturbaciones, un sistema de control de lazo abierto no cumple su función
asignada, por no tener una forma de conocer el resultado del control efectuado o salida del
proceso. En la práctica el control de lazo abierto sólo se utiliza si la relación entre la entrada y
la salida es conocida y si no se presentan perturbaciones tanto internas como externas
significativas.
Sistemas de Control Automáticos
Página 6
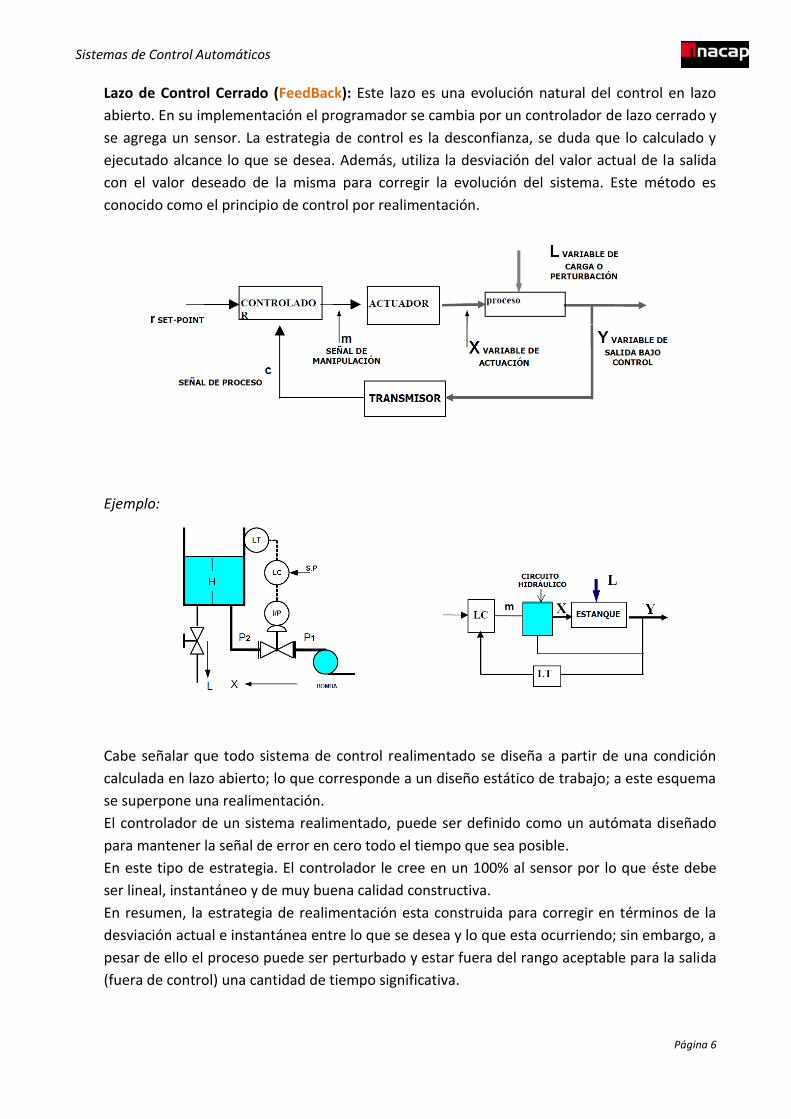
Lazo de Control Cerrado (FeedBack): Este lazo es una evolución natural del control en lazo
abierto. En su implementación el programador se cambia por un controlador de lazo cerrado y
se agrega un sensor. La estrategia de control es la desconfianza, se duda que lo calculado y
ejecutado alcance lo que se desea. Además, utiliza la desviación del valor actual de la salida
con el valor deseado de la misma para corregir la evolución del sistema. Este método es
conocido como el principio de control por realimentación.
Ejemplo:
Cabe señalar que todo sistema de control realimentado se diseña a partir de una condición
calculada en lazo abierto; lo que corresponde a un diseño estático de trabajo; a este esquema
se superpone una realimentación.
El controlador de un sistema realimentado, puede ser definido como un autómata diseñado
para mantener la señal de error en cero todo el tiempo que sea posible.
En este tipo de estrategia. El controlador le cree en un 100% al sensor por lo que éste debe
ser lineal, instantáneo y de muy buena calidad constructiva.
En resumen, la estrategia de realimentación esta construida para corregir en términos de la
desviación actual e instantánea entre lo que se desea y lo que esta ocurriendo; sin embargo, a
pesar de ello el proceso puede ser perturbado y estar fuera del rango aceptable para la salida
(fuera de control) una cantidad de tiempo significativa.
Sistemas de Control Automáticos
Página 7
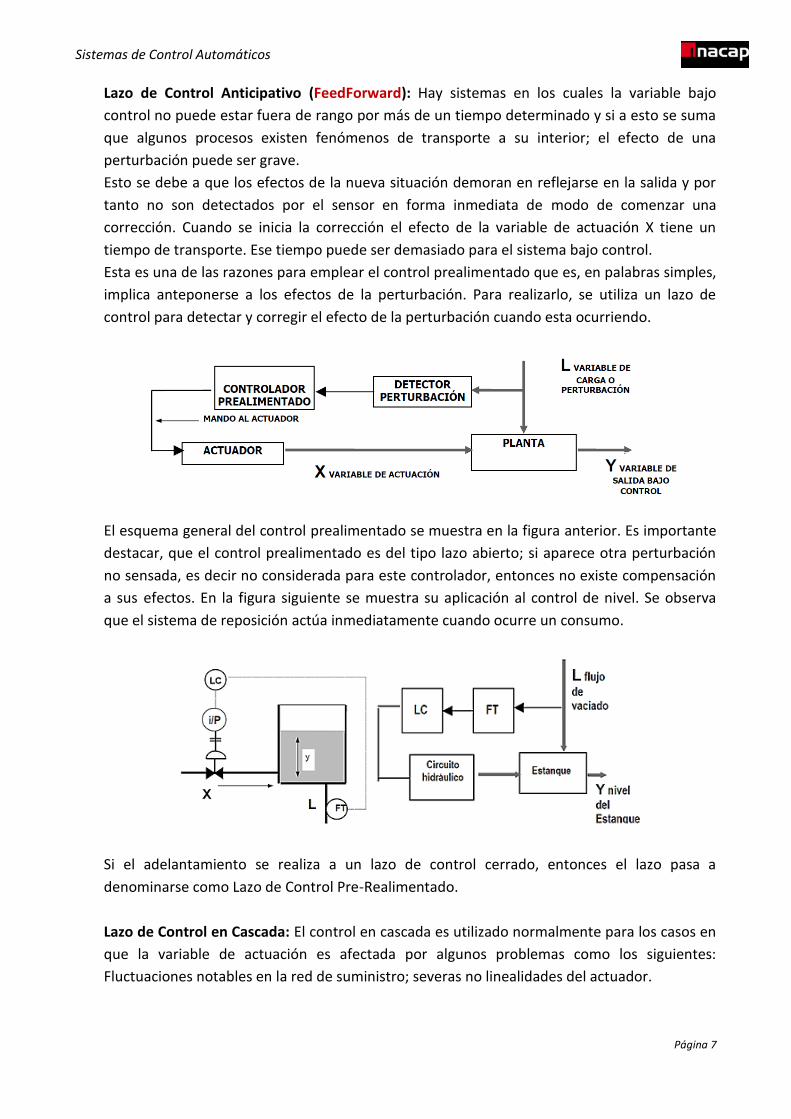
Lazo de Control Anticipativo (FeedForward): Hay sistemas en los cuales la variable bajo
control no puede estar fuera de rango por más de un tiempo determinado y si a esto se suma
que algunos procesos existen fenómenos de transporte a su interior; el efecto de una
perturbación puede ser grave.
Esto se debe a que los efectos de la nueva situación demoran en reflejarse en la salida y por
tanto no son detectados por el sensor en forma inmediata de modo de comenzar una
corrección. Cuando se inicia la corrección el efecto de la variable de actuación X tiene un
tiempo de transporte. Ese tiempo puede ser demasiado para el sistema bajo control.
Esta es una de las razones para emplear el control prealimentado que es, en palabras simples,
implica anteponerse a los efectos de la perturbación. Para realizarlo, se utiliza un lazo de
control para detectar y corregir el efecto de la perturbación cuando esta ocurriendo.
El esquema general del control prealimentado se muestra en la figura anterior. Es importante
destacar, que el control prealimentado es del tipo lazo abierto; si aparece otra perturbación
no sensada, es decir no considerada para este controlador, entonces no existe compensación
a sus efectos. En la figura siguiente se muestra su aplicación al control de nivel. Se observa
que el sistema de reposición actúa inmediatamente cuando ocurre un consumo.
Si el adelantamiento se realiza a un lazo de control cerrado, entonces el lazo pasa a
denominarse como Lazo de Control Pre-Realimentado.
Lazo de Control en Cascada: El control en cascada es utilizado normalmente para los casos en
que la variable de actuación es afectada por algunos problemas como los siguientes:
Fluctuaciones notables en la red de suministro; severas no linealidades del actuador.
Sistemas de Control Automáticos
Página 8
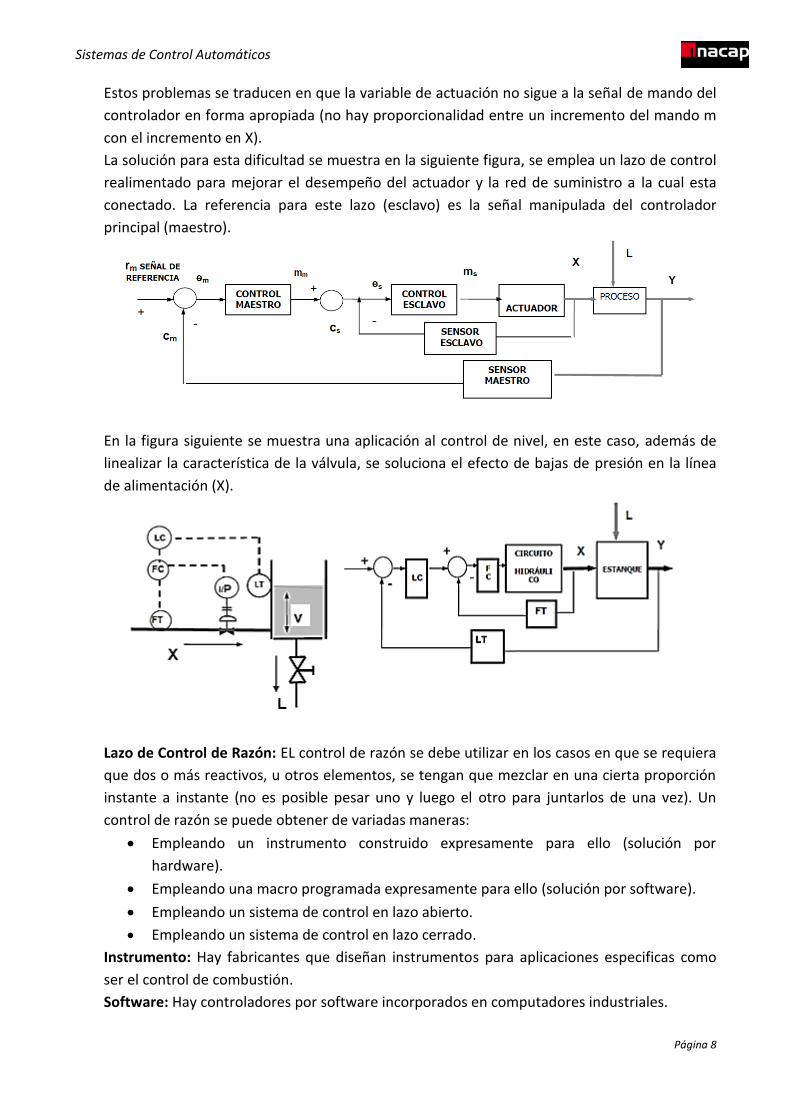
Estos problemas se traducen en que la variable de actuación no sigue a la señal de mando del
controlador en forma apropiada (no hay proporcionalidad entre un incremento del mando m
con el incremento en X).
La solución para esta dificultad se muestra en la siguiente figura, se emplea un lazo de control
realimentado para mejorar el desempeño del actuador y la red de suministro a la cual esta
conectado. La referencia para este lazo (esclavo) es la señal manipulada del controlador
principal (maestro).
En la figura siguiente se muestra una aplicación al control de nivel, en este caso, además de
linealizar la característica de la válvula, se soluciona el efecto de bajas de presión en la línea
de alimentación (X).
Lazo de Control de Razón: EL control de razón se debe utilizar en los casos en que se requiera
que dos o más reactivos, u otros elementos, se tengan que mezclar en una cierta proporción
instante a instante (no es posible pesar uno y luego el otro para juntarlos de una vez). Un
control de razón se puede obtener de variadas maneras:
Empleando un instrumento construido expresamente para ello (solución por
hardware).
Empleando una macro programada expresamente para ello (solución por software).
Empleando un sistema de control en lazo abierto.
Empleando un sistema de control en lazo cerrado.
Instrumento: Hay fabricantes que diseñan instrumentos para aplicaciones especificas como
ser el control de combustión.
Software: Hay controladores por software incorporados en computadores industriales.
Sistemas de Control Automáticos
Página 9
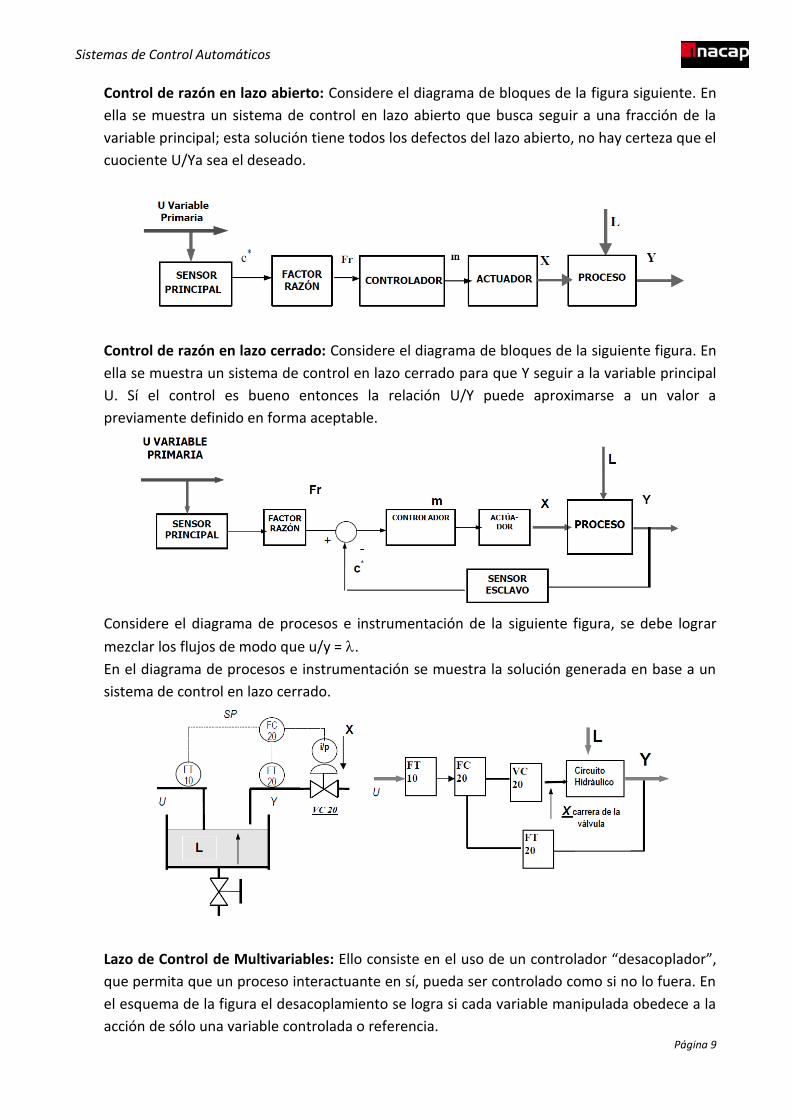
Control de razón en lazo abierto: Considere el diagrama de bloques de la figura siguiente. En
ella se muestra un sistema de control en lazo abierto que busca seguir a una fracción de la
variable principal; esta solución tiene todos los defectos del lazo abierto, no hay certeza que el
cuociente U/Ya sea el deseado.
Control de razón en lazo cerrado: Considere el diagrama de bloques de la siguiente figura. En
ella se muestra un sistema de control en lazo cerrado para que Y seguir a la variable principal
U. Sí el control es bueno entonces la relación U/Y puede aproximarse a un valor a
previamente definido en forma aceptable.
Considere el diagrama de procesos e instrumentación de la siguiente figura, se debe lograr
mezclar los flujos de modo que u/y = .
En el diagrama de procesos e instrumentación se muestra la solución generada en base a un
sistema de control en lazo cerrado.
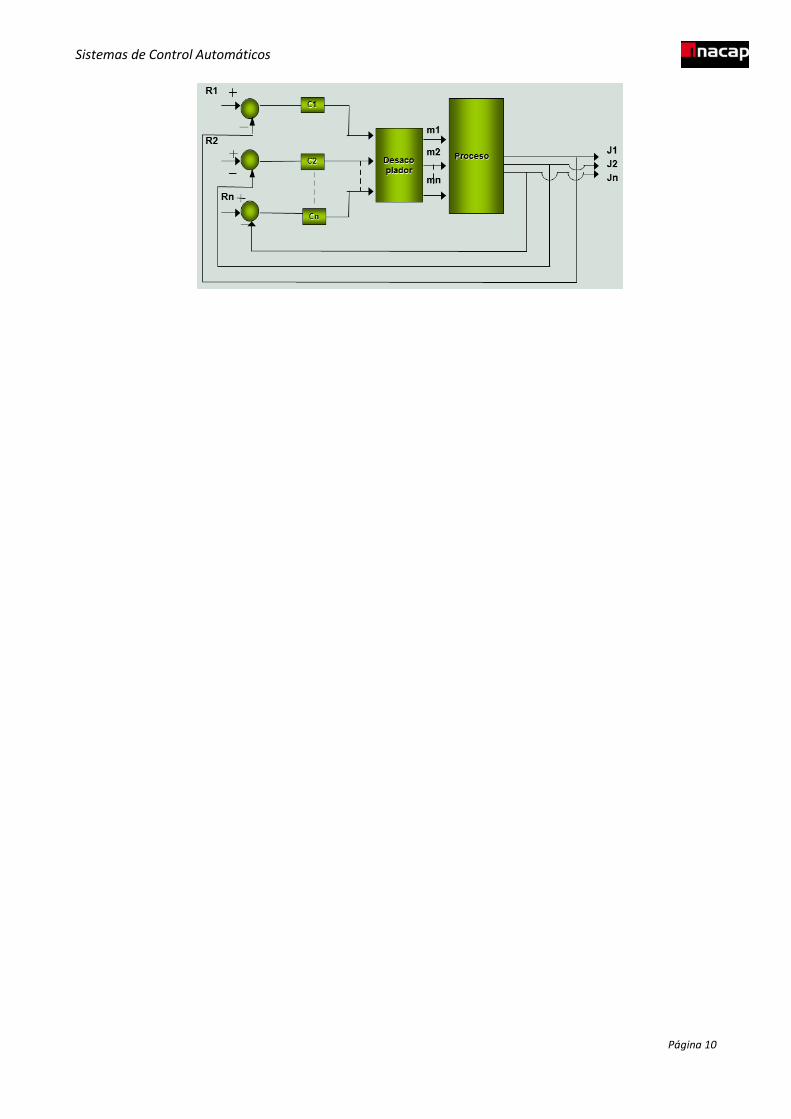
Lazo de Control de Multivariables: Ello consiste en el uso de un controlador “desacoplador”,
que permita que un proceso interactuante en sí, pueda ser controlado como si no lo fuera. En
el esquema de la figura el desacoplamiento se logra si cada variable manipulada obedece a la
acción de sólo una variable controlada o referencia.
Sistemas de Control Automáticos
Página 10
Related Documents