Lapped Solid Textrues Filling a Model with Anisotropic Textures Kenshi Takayama, Makoto Okabe, Takashi Ijiri, Takeo Igarashi The University of Tokyo 발발 : 발발발

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Lapped Solid TextruesFilling a Model with Anisotropic Textures
Kenshi Takayama, Makoto Okabe, Takashi Ijiri, Takeo Igarashi
The University of Tokyo
발표 : 이성호
2
Abstract
• representing solid objects – with spatially varying oriented textures– by repeatedly pasting solid texture exemplars
• Extend the 2D lapped textures to 3D solids
• creating solid models – whose textural patterns change gradually – along the depth fields
• Identify several texture types
3
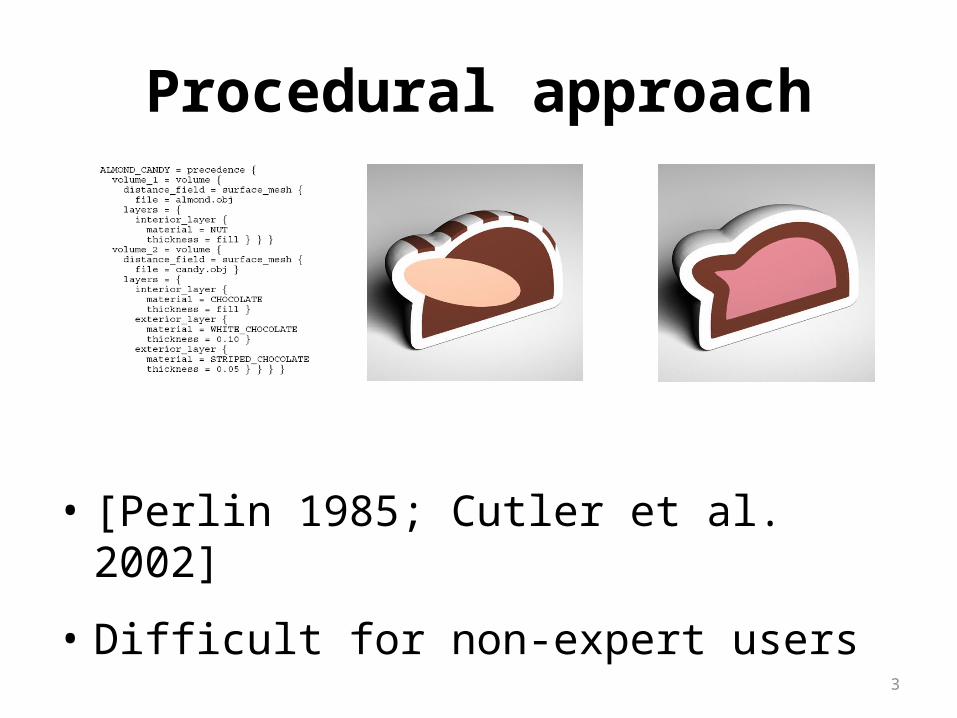
Procedural approach
• [Perlin 1985; Cutler et al. 2002]
• Difficult for non-expert users

4
2D texture synthesis on cross sections
• [Owada et al. 2004; Pietroni et al. 2007]
• Limitations– Inconsistency among dif-
ferent cross-sections– Difficulty in handling tex-
tures with discontinuous elements• Such as seeds

5
Example-based 3D solid texture synthesis
• [Jagnow et al. 2004; Kopf et al. 2007]
• For large-scale solid models– The amount of data and computational cost become
problematic

6
Lapped textures

7
Lapped solid textures
• Arrange solid textures along a tensor field
• handle spatially-varying textures
• classify solid textures into several types– according to the amount of anisotropy and spatial variation
• Designed easily and created efficiently
• Little memory and computational cost

8
Classification of solid textures

9
• [Kopf et al. 2007]– 1-a
• [Owada et al. 2004]– 1-b
• This paper– 2-a and 2-b
• Not considered– 2-c and 2-d
10
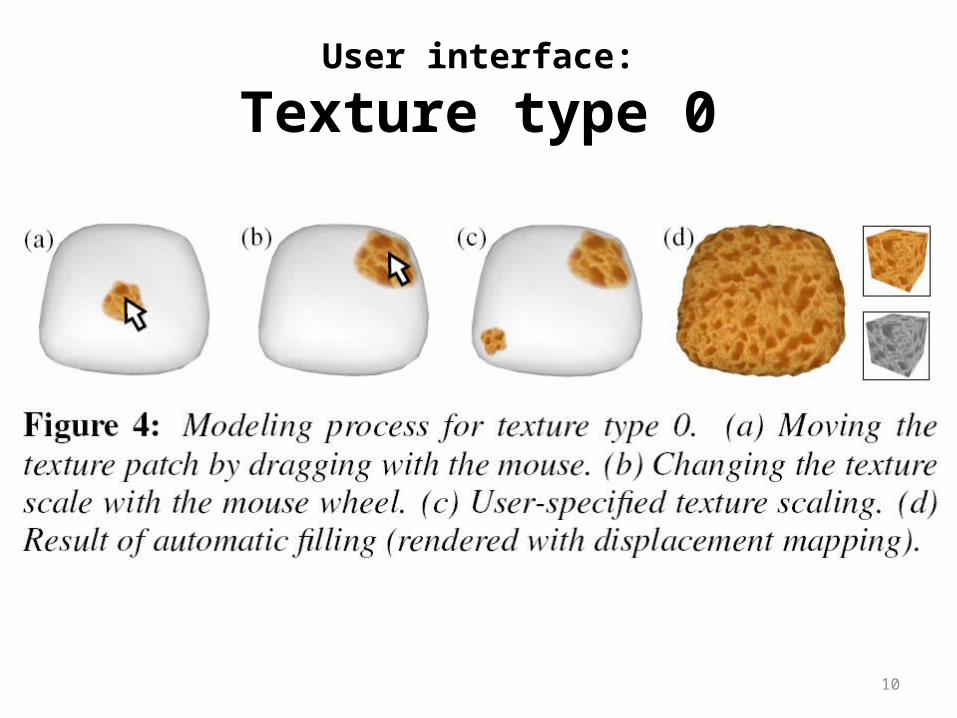
User interface:
Texture type 0

11
Type 1-a

12
Type 1-b

13
Type 2-a
14
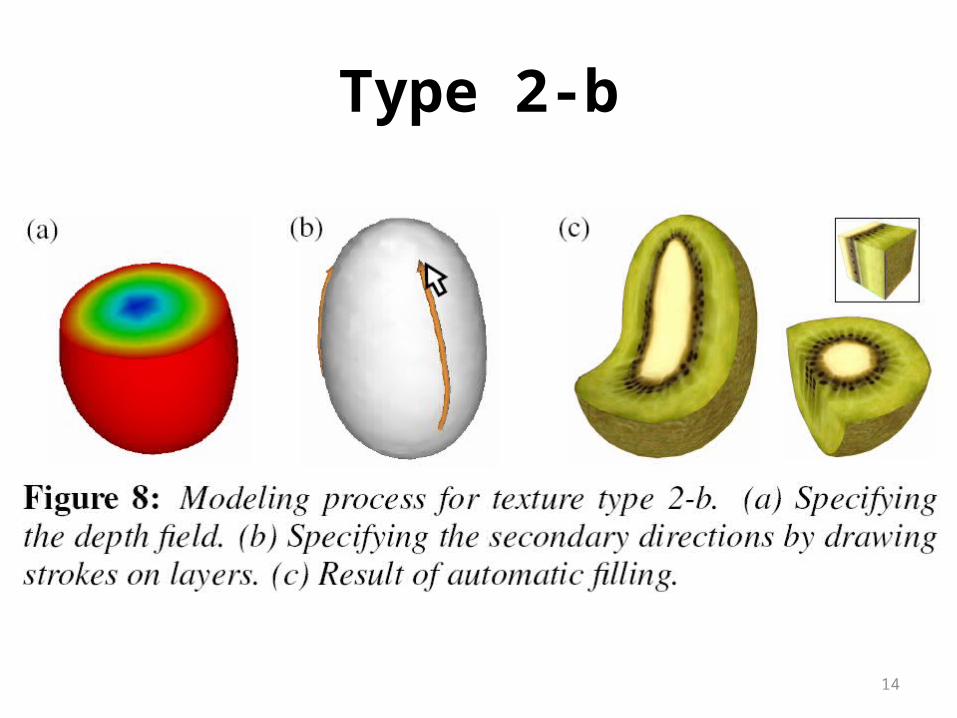
Type 2-b

15
Manual pasting of tex-tures
16
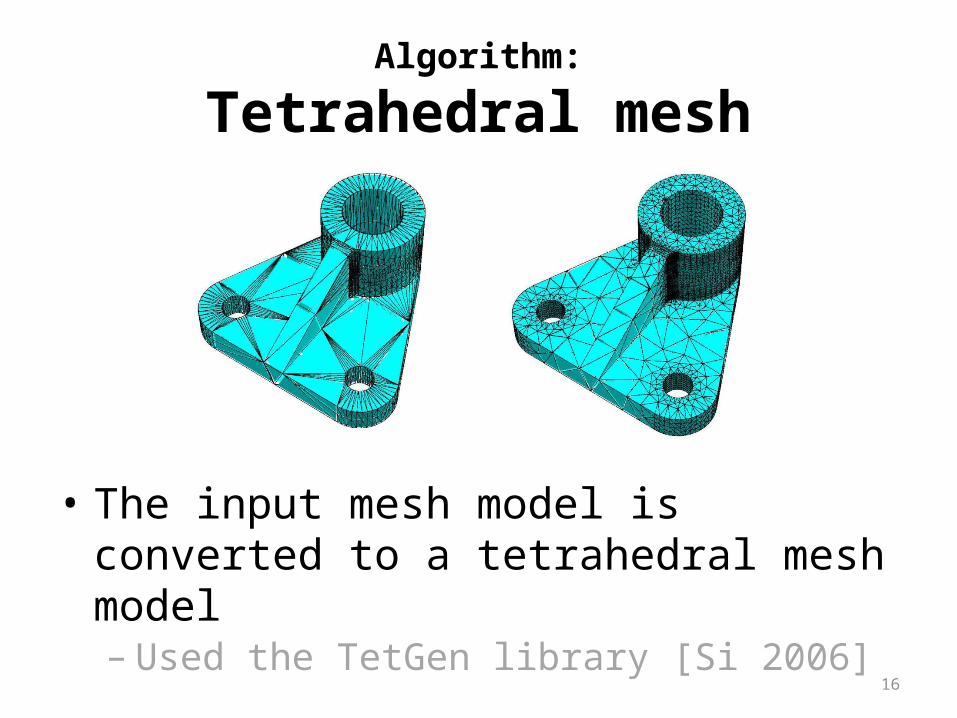
Algorithm:
Tetrahedral mesh
• The input mesh model is converted to a tetrahedral mesh model– Used the TetGen library [Si 2006]
17
Preparation of solid texture exemplars
• Solid texture synthesis [Kopf et al. 2007]
• Noise functions [Cook and DeRose 2005]
• Volume capturing using slicers [Banvard 2002]
• In-house voxel editor (this paper)– Created manually from photographs

18
Rendering an LST model
• convert tetrahedron model– Into a polygonal model– That consists of surface triangles – with a list of 3D texture coordinates as-
signed to each of its three vertices
• Each surface triangle is rendered multi-ple times– Approximately 10–20 times
• in most of our results– With alpha blending enabled

19
Cutting
• Constructs a scalar field– Using radial basis function (RBF) interpolation [Turk and O’Brien
1999]
• Texture coordinates for each triangle on the cross-section– obtained by linear interpolation

20
Volume rendering
• Construct a scalar field– over the mesh vertices– To give the distance between the cam-
era and each vertex
• Calculate a large number of slices of the model– perpendicular to the camera direction – by iso-surface extraction

21
Creating an alpha mask of the solid texture
• Create 3D mask– Using [Nealen et al. 2007]– The alpha value drops off around the boundary of the mask
• We assume all the textures in our examples are less struc-tured– Use a constant “splotch” mask shown in Fig. 11
• for all the textures

22
Constructing a tensor field
• Type 1-a and 1-b– First direction
• user-drawn strokes (1-a)• Gradient direction of the depth field (1-b)
– Other direction is chosen randomly• when pasting each patch
• Type 2-a and 2-b– First direction
• Gradient direction of the depth field– Second direction
• User-drawn strokes– Third direction
• Cross product of the two
• Magnitudes of tensors– User-specified texture scaling values– Except for types 1-b and 2-b
• Set automatically from the depth field

23
Interpolating tensor field (1/3)
• Laplacian smoothing [Fu et al. 2007]

24
Interpolating tensor field (2/3)
• Minimizing Laplacians (Eq. 1) while satisfying the collec-tion of constraints (Eq. 2) in a least squares sense forms a sparse linear system, which can be solved quickly.
25
Interpolating tensor field (3/3)
• Perform Laplacian smoothing– for each x-, y-, and z-component of the
vectors• which are later combined and normalized.
• Types 2-a and 2-b,– no guarantee that resulting vectors will– always be orthogonal to the first direction– orthogonalize these vectors
• To the first direction after smoothing

26
27
• Obtain a depth field– By using thin-plate RBF interpolation in the 3D
Euclidean space [Turk and O’Brien 1999]• the depth field must be defined as a smooth function
in 3D space
• Assign depth values– of 0 and 1 to the outermost (red) and the in-
nermost (blue) regions, respectively
• Types 1-b and 2-b,– These depth values are used directly
• As one of the three texture coordinates

28
Selecting a seed tetra-hedron
• Initialize a list of “uncovered” tetrahedra
• One is selected at random– For each pasting operation
• Tetrahedra are removed from the list – If they are completely covered
• Repeat this process– Until the “uncovered” list becomes empty
• Manual pasting of the textures– Seed tetrahedron is set to the one
• Clicked by the user

29
Growing a clump of tetrahedra

30
Texture optimization

31

32
Coverage test of tetra-hedron
• linearly sample the alpha values of the mask – at these discrete points of each
tetrahedron – in the clump– which are then accumulated.
• Assume that the tetrahedron is completely covered by the over-lapping textures– If the accumulated alpha values of all
the sampling points of a tetrahedron reach 255

33
Creation of depth-varying solid models
• Map the clump of tetrahedra– Into the corresponding depth position • In the texture space • Instead of the central position
• alter the positional constraints – from (0.5, 0.5, 0.5)t to (0.5, dseed, 0.5, )t,
– dseed is the depth value assigned to Tseed • Assuming the s-axis corresponds to the
depth orientation
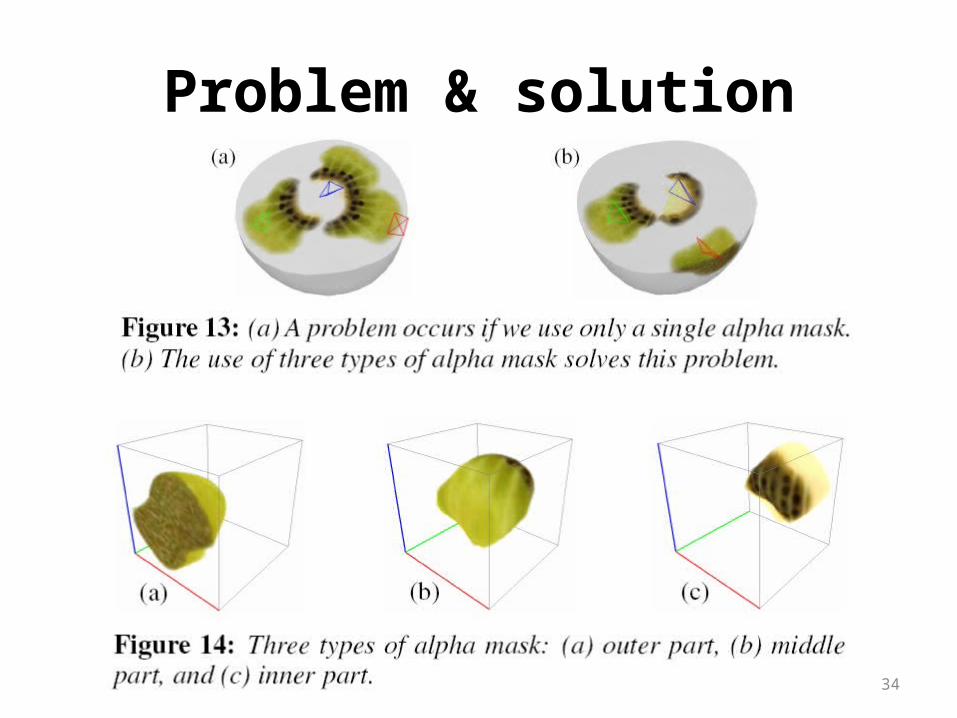
34
Problem & solution

35
Results
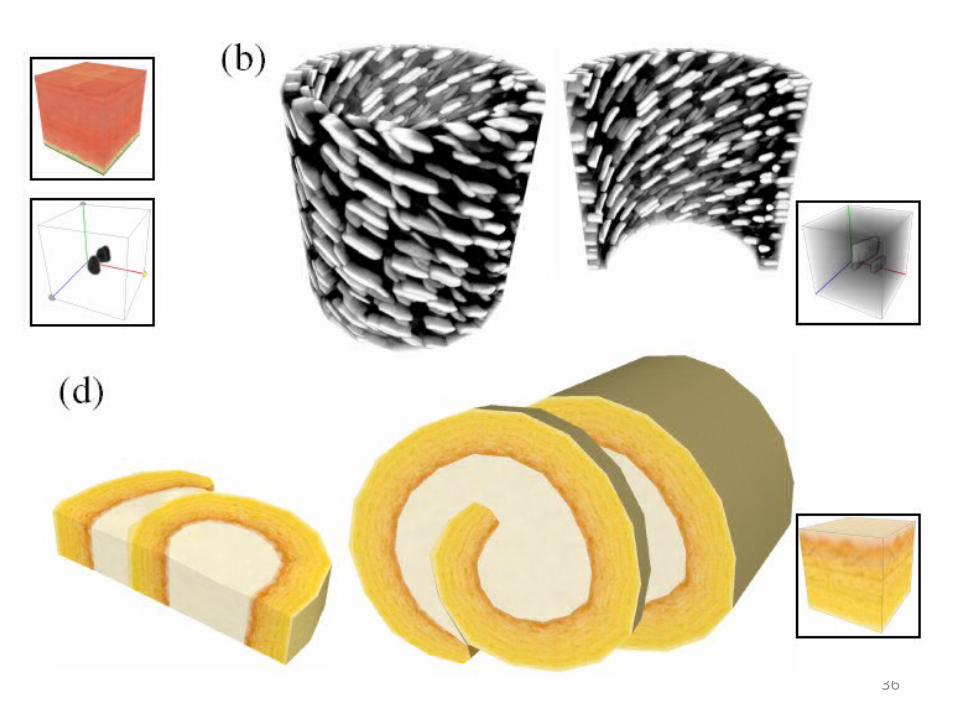
36

37

38
Limitations and future work
• Patch seams– a texture with strong low-frequency components
• Singularities of the tensor field
• blurring artifacts
• Preparation of exemplar solid textures
Related Documents











