GAYA GESEKAN Wahdini Ramli, Darlina, Siti Hardianti Retno Ambar Wati PENDIDIKAN FISIKA UNM 2014 Abstrak Telah dilakukan eksperimen “Gaya Gesekan” yang bertujuan untuk mengetahui faktor-faktor yang mempengaruhi gaya gesekan, memahami konsep gaya gesekan statik dan kinetik dan menentukan kofisien gesekan statik dan kinetik. Alat dan bahan yang digunakan adalah neraca pegas, katrol meja, balok, beban tambahan, tali/benang, papan landasan, bidang miring, stopwatch, dan meteran. Untuk prosedur kerja pada kegiatan 1 yaitu mencari hubungan antara gaya normal dengan gaya gesekan dengan menggunakan balok kasar yang gaya normalnya diubah-ubah dengan penambahan beban. Pada kegiatan 2 mencari hubungan antara keadaan permukaan dengan gaya gesekan dengan memanipulasi keadaan permukaan balok. Pada kegiatan 3 menentukan kofisien gesekan statik pada bidang miring dengan memanipulasi gaya normal. Dan pada kegiatan 4 menentukan kofisien gesekan kinetik pada bidang miring dengan memanipulasi jarak tempuh. Dari keseluruhan praktikum, menunjukkan hasil yang sesuai dengan teori. Sehingga ditarik kesimpulan bahwa gaya normal berbanding lurus dengan gaya gesekan, tingkat kekasaran permukaan benda berbanding lurus dengan gaya gesekan, kofisien gaya gesekan statik berbanding lurus dengan sudut kritis dan berbanding terbalik dengan gaya beratnya dan gaya gesekan kinetik berbanding lurus dengan percepatannya. Kata kunci: gaya gesekan statik, gaya gesekan kinetik, sudut kemiringan bidang, gaya tarik, gaya normal TUJUAN 1. Mengetahui faktor-faktor yang mempengaruhi gaya gesekan. 2. Memahami konsep gaya gesekan statik dan kinetik. 3. Menentukan kofisien gesekan statik dan kinetik.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
GAYA GESEKAN
Wahdini Ramli, Darlina, Siti Hardianti Retno Ambar Wati
PENDIDIKAN FISIKA UNM 2014
Abstrak
Telah dilakukan eksperimen “Gaya Gesekan” yang bertujuan untukmengetahui faktor-faktor yang mempengaruhi gaya gesekan, memahamikonsep gaya gesekan statik dan kinetik dan menentukan kofisiengesekan statik dan kinetik. Alat dan bahan yang digunakan adalahneraca pegas, katrol meja, balok, beban tambahan, tali/benang, papanlandasan, bidang miring, stopwatch, dan meteran. Untuk prosedurkerja pada kegiatan 1 yaitu mencari hubungan antara gaya normaldengan gaya gesekan dengan menggunakan balok kasar yang gayanormalnya diubah-ubah dengan penambahan beban. Pada kegiatan 2mencari hubungan antara keadaan permukaan dengan gaya gesekan denganmemanipulasi keadaan permukaan balok. Pada kegiatan 3 menentukankofisien gesekan statik pada bidang miring dengan memanipulasi gayanormal. Dan pada kegiatan 4 menentukan kofisien gesekan kinetik padabidang miring dengan memanipulasi jarak tempuh. Dari keseluruhanpraktikum, menunjukkan hasil yang sesuai dengan teori. Sehinggaditarik kesimpulan bahwa gaya normal berbanding lurus dengan gayagesekan, tingkat kekasaran permukaan benda berbanding lurus dengangaya gesekan, kofisien gaya gesekan statik berbanding lurus dengansudut kritis dan berbanding terbalik dengan gaya beratnya dan gayagesekan kinetik berbanding lurus dengan percepatannya.
Kata kunci: gaya gesekan statik, gaya gesekan kinetik,sudut kemiringan bidang, gaya tarik, gaya normal
TUJUAN
1. Mengetahui faktor-faktor yang mempengaruhi gaya
gesekan.
2. Memahami konsep gaya gesekan statik dan kinetik.
3. Menentukan kofisien gesekan statik dan kinetik.
RUMUSAN MASALAH
1. Faktor-faktor apa saja yang mempengaruhi gaya
gesekan?
2. Bagaimana konsep gaya gesekan statik dan kinetik?
3. Bagaimana cara menentukan kofisien gesekan statik
dan kinetik pada bidang datar dan bidang miring?
4. Bagaimana hubungan antara gaya gesekan dengan gaya
normal, massa benda, keadaan permukaan benda, dan
besarnya sudut kemiringan bidang?
METODOLOGI EKSPERIMEN
Teori Singkat
1. Gaya gesekan
Apabila ada dua benda yang berinteraksi melalui
kontak atau sentuhan langsung pada permukaannya,
maka akan timbul suatu gaya yang disebut gaya
kontak. Gaya kontak ini memiliki komponen yang
sejajar dengan permukaan sentuh yang secara khusus
disebut gaya gesekan, sedangkan komponen lain yang
tegak lurus dengan permukaan sentuh disebut gaya
normal. Ketika sebuah benda bergerak, baik pada
suatu permukaan maupun pada media kental seperti
udara atau air, ada kekuatan yang melawan gerak
benda itu karena berinteraksi dengan lingkungannya
yang disebut dengan gaya gesekan. Gaya gesekan
sangat penting dalam kehidupan sehari-hari
Sebuah balok yang didorong di atas meja akan
bergera bila sebuah balok massanya m, kita lepaskan
dengan kecepatan awal Vo pada sebuah bidang
horizontal, maka balok itu akhirnya akan berhenti.
Ini berarti di dalam gerakan balok mengalami
perlambatan, atau ada gaya yang menahan balok, gaya
ini disebut gaya gesekan.
2. Faktor-faktor yang mempengaruhi gaya gesekan
Karena arah gaya gesekan selalu berlawanan dengan
arah gerak benda, sehingga bersifat menghambat gerak
benda. Walaupun gaya normal arahnya tegak lurus
terhadap arah gerak benda, namun gaya nomal
memberikan pengaruh pada besarnya gaya gesekan.
Sehingga gaya gesekan dipengaruhi oleh:
a. Gaya normal (N)
Gaya normal timbul jika suatu benda bersentuhan
dengan permukaan suatu bidang. Sehingga gaya
normal adalah gaya reaksi dari bidang akibat
gaya aksi dari benda yang arahnya tegak lurus
terhadap bidang. Makin besar gaya normlanya,
maka makin besar pula gaya gesekannya. Gaya
normal ada karena reaksi terhadap gaya berat
benda (aksi) yang diakibatkan oleh adanya massa
benda yang memperhitungkan besar percepatan
gravitasi tempat benda tersebut itu berada dari
permukaan bumi. Sehingga gaya normal N = m.g
dimana m adalah massa, dan g adalah percepatan
gravitasi.
b. Kofisien gesekan (μ)
Kofisien gesekan adalah tingkat kekasaran
permukaan yang bergesekan. Makin kasar kontak
bidang permukaan yang bergesekan, maka makin
besar pula gaya gesekan yang ditimbulkan. Nilai
kofisien gesekan dari yang paling halus ke
kasar adalah 0-1 yang tidak berkonstanta.
3. Gaya gesekan statik dan kinetik
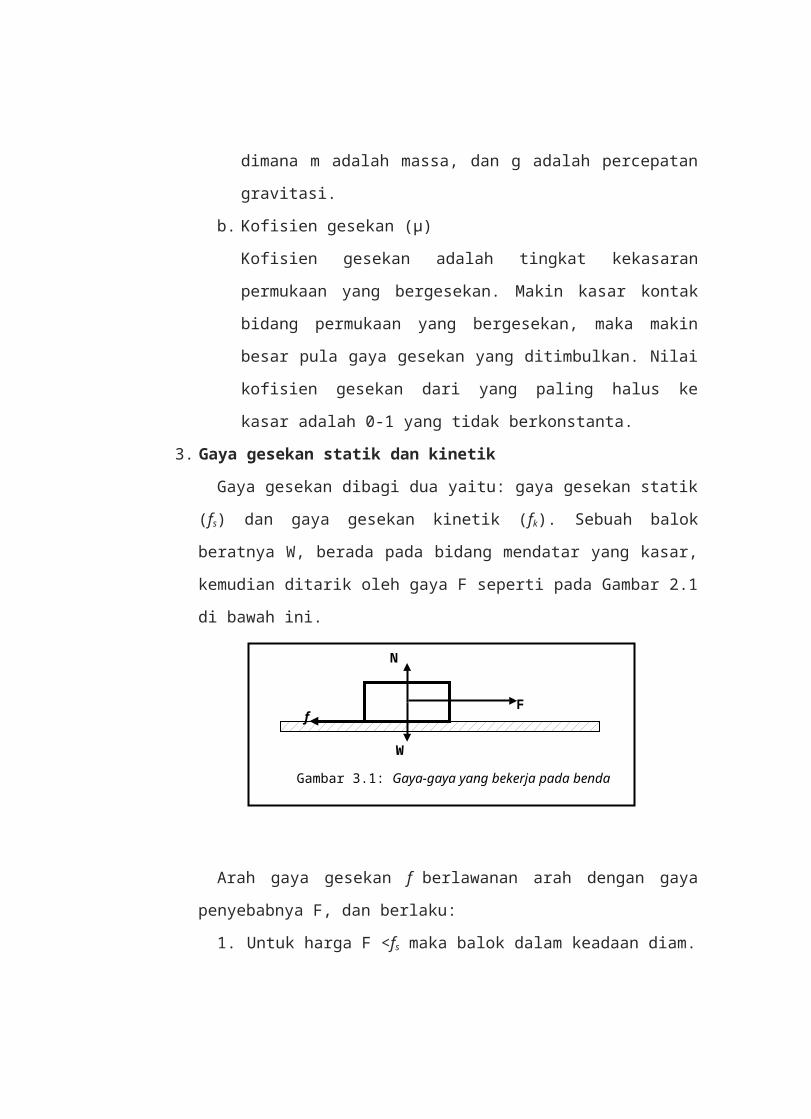
Gaya gesekan dibagi dua yaitu: gaya gesekan statik
(fs) dan gaya gesekan kinetik (fk). Sebuah balok
beratnya W, berada pada bidang mendatar yang kasar,
kemudian ditarik oleh gaya F seperti pada Gambar 2.1
di bawah ini.
Arah gaya gesekan f berlawanan arah dengan gaya
penyebabnya F, dan berlaku:
1. Untuk harga F <fs maka balok dalam keadaan diam.
Ff
N
W
Gambar 3.1: Gaya-gaya yang bekerja pada benda
2. Untuk harga F = fs maka balok tepat saat akan
bergerak.
3. Apabila Fase diperbesar lagi sehingga F >fs maka
benda bergerak dan gaya gesekan statik fs akan
berubah menjadi gaya gesekan kinetik fk.
Gaya gesekan antara dua permukaan yang saling diam
satu terhadap yang lain disebut gaya gesekan statik.
Gaya gesekan statik yang maksimum sama dengan gaya
terkecil yang dibutuhkan agar benda mulai bergerak.
Sekali gerak telah dimulai, gaya gesekan antar kedua
permukaan biasanya berkurang sehingga diperlukan
gaya yang lebih kecil untuk menjaga agar benda
bergerak beraturan. Besarnya gaya gesekan statik
antara dua permuakaan yang bersentuhan dapat
bernilai.
fs≤μsN
Dimana konstanta tanpa dimensi μs, yang disebut
kofisien gaya statik dan N adalah besar gaya normal
yang dikerjakan oleh satu permukaan kepada permukaan
yang lainnya. Tanda sama dengan berlaku pada saat
kedua permukaan itu tepat akan tergelincir, yaknifs=fmaks≡μsN. Keadaan ini disebut gerak yang akan terjadi.
Tanda tidak sama dengan berlaku ketika kedua
permukaannya tidak dalam keadaan akan tergelincir.
Jika fs menyatakan besar gaya gesekan statik
maksimum, maka :
μs=fsN (3.1)
Dengan μs adalah koefisien gesekan statik dan N
adalah besar gaya normal. Gaya yang bekerja antara
dua permukaan yang saling bergerak relatif disebut
gaya gesekan kinetik. Besarnya gaya gesekan kinetik
yang bekerja atara dua permukaan adalah.
fk=μkN
Dimana μk adalah kofisien gesekan kinetik.
Mesikipun kofisien gesekan kinetik dapat berubah-
ubah bergantung kelajuannya, namun dapat diabaikan
dalam pengamatan ini. Jika fk menyatakan besar gaya
gesekan kinetik, maka :
μk=fkN (3.2)
dengan μk adalah koefisien gesekan kinetik.
Bila sebuah benda dalam keadaan diam pada suatu
bidang datar, dan kemudian bidang tempat benda
tersebut dimiringkan perlahan-lahan sehingga
membentuk sudut sampai benda tepat akan bergerak,
koefisien gesekan statik antara benda dan bidang
diberikan oleh persamaan,
s = tan c (3.3)
Dengan c adalah sudut pada saat benda tepat akan
bergerak, yang disebut sudut kritis. Koefisien
gesekan statik merupakan nilai tangen sudut
kemiringan bidang, dengan keadaan benda tepat akan
bergerak/meluncur. Pada sudut-sudut yang lebih besar
dari c, balok meluncur lurus berubah beraturan ke
ujung bawah bidang miring dengan percepatan :ax = g (sin θ − μk cos θ) (3.4)
di mana adalah sudut kemiringan bidang dan k
adalah koefisien gesekan kinetik antara benda dengan
bidang. Dengan mengukur percepatan ax, maka
koefisien gesekan k dapat dihitung.
Alat dan Bahan
1. Neraca pegas 0-3 N
2. Neraca Ohauss 310 gram
3. Katrol meja
4. Balok kasar+agak kasar+licin+stecker penyambung
5. 3 Beban tambahan
6. Tali/benang
7. Papan landasan
8. Bidang miring
9. Stopwatch
10. Meteran
Identifikasi Variabel
Kegiatan 1: Hubungan antara gaya normal dengan gaya gesekan
1. Variabel manipulasi
Gaya normal (N) dan keadaan benda
2. Variabel respon
Gaya tarik (N)
3. Variabel kontrol
Jenis permukaan
Kegiatan 2: Hubungan antara keadaan permukaan dengan gaya gesekan
1. Variabel manipulasi
Jenis permukaan
2. Variabel respon
Gaya tarik (N)
3. Variabel kontrol
Gaya normal (N)
Kegiatan 3: Menentukan koefisien gesekan statik pada bidang miring
1. Variabel manipulasi
Gaya berat (N)
2. Variabel respon
Sudut kritis
3. Variabel kontrol
Jenis permukaan
Kegiatan 4: Menentukan koefisien gesekan kinetik pada bidang miring
1. Variabel manipulasi
Jarak tempuh (m)
2. Variabel respon
Waktu tempuh (s)
3. Variabel kontrol
Massa beban (kg) , sudut kemiringan bidang (˚), dan
jenis permukaan.
Definisi Operasional Variabel
Kegiatan 1: Hubungan antara gaya normal dengan gaya gesekan
1. Variabel manipulasi
a. Gaya normal adalah besar gaya reaksi dari
permukaan meja akibat gaya aksi dari balok dengan
permukaan kasar ditambah beban 1, ditambah beban
1 dan 2, dan ditambah beban 1, 2, dan 3 yang
terlebih dahulu diukur massanya dengan
menggunakan neraca Ohauss 310 gram kemudian
dikonversikan ke satuan kilogram lalu dikalikan
dengan percepatan gravitasi (bergantung pada
massa dan arahnya selalu tegak lurus dengan
bidang).
b. Keadaan benda adalah keadaan balok yang ditinjau
saat balok yang diberikan gaya tarik tepat akan
bergerak dan pada saat balok bergerak lurus
beraturan.
2. Variabel respon
Gaya tarik adalah gaya yang timbul akibat tarikan
terhadap balok dengan menggunakan neraca pegas yang
telah dihubungkan dengan tali dan katrol yang
merupakan penunjukkan dari gaya gesekan pada balok
dengan permukaan kasar ditambah beban 1, ditambah
beban 1 dan 2, ditambah beban 1, 2, dan 3.
3. Variabel kontrol
Jenis permukaan adalah keadaan permukaan balok yang
bersentuhan dengan meja yang dibuat tetap yaitu
balok dalam keadaan kasar dan meja dalam keadaan
licin tiap perubahan gaya normal.
Kegiatan 2: Hubungan antara keadaan permukaan dengan gaya gesekan
1. Variabel manipulasi
Jenis permukaan adalah keadaan permukaan balok yang
bersentuhan dengan meja yang dibuat berubah yaitu
dari permukaan yang kasar, agak kasar, dan licin.
2. Variabel respon
Gaya tarik adalah gaya yang timbul akibat tarikan
terhadap balok dengan menggunakan neraca pegas yang
telah dihubungkan dengan tali dan katrol yang
merupakan penunjukkan dari gaya gesekan pada balok
yang kasar, agak kasar, dan licin.
3. Variabel kontrol
Gaya normal adalah besar gaya reaksi dari permukaan
meja akibat adanya gaya berat (aksi) yang arahnya
selalu tegak lurus dengan bidang dari balok tanpa
penambahan beban yang bergantung pada massanya yang
dibuat tetap setiap keadaan permukaan yang berbeda
yang didapatkan dengan mengukur massa balok pada
neraca Ohauss 310 gram lalu dikonversikan ke dalam
satuan kg, kemudian dikalikan dengan percepatan
gravitasi.
Kegiatan 3: Menentukan koefisien gesekan statik pada bidang miring
1. Variabel manipulasi
Gaya berat adalah besar berat balok, balok + beban
1, balok + beban 1 dan 2, dan balok + beban 1, 2,
dan 3 yang diukur massanya terlebih dahulu dengan
menggunakan neraca Ohauss 310 gram lalu
dikonversikan ke dalam satuan kg, kemudian dikalikan
dengan percepatan gravitasi.
2. Variabel respon
Sudut kritis adalah besar sudut kemiringan bidang
tepat pada saat balok kasar tepat akan bergerak dari
ujung bidang miring bagian atas hingga pada saat
balok tepat akan bergerak dengan menggunakan busur
derajat yang terdapat pada bidang miring.
3. Variabel kontrol
Jenis permukaan adalah keadaan permukaan balok yang
bersentuhan dengan bidang miring yang dibuat tetap
yaitu balok dalam keadaan kasar dan bidang miring
dalam keadaan licin tiap perubahan gaya normal.
Kegiatan 4: Menentukan koefisien gesekan kinetik pada bidang miring
1. Variabel manipulasi
Jarak tempuh adalah panjang lintasan balok tanpa
beban tambahan yang bergerak dari titik atau posisi
tertentu dari bidang miring yang diukur dari ujung
bawah bidang miring hingga 100 cm, 70 cm, dan 50 cm
yang diukur dengan menggunakan meteran.
2. Variabel respon
Waktu tempuh adalah lamanya balok untuk sampai dari
titik yang telah ditentukan panjangnya pada bidang
miring hingga ke ujung bawah bidang miring yang
diukur dengan menggunakan stopwatch tepat pada saat
balok dilepaskan.
4. Variabel kontrol
a. Massa beban adalah ukuran materi balok yang
diukur dengan menggunakan neraca Ohauss 310 gram
yang diletakkan pada bidang miring untuk diukur
waktu tempuhnya.
b. Sudut kemiringan bidang adalah besar kemiringan
sudut yang telah diatur terlebih dahulu dengan
tetap menggunakan busur derajat yang ada pada
bidang miring yang besarnya lebih besar dari
sudut kritis balok tanpa penambahan beban yaitu
ditambah 2 derajat.
c. Jenis permukaan adalah keadaan permukaan balok
yang bersentuhan dengan bidang miring yang dibuat
tetap yaitu balok dalam keadaan kasar dan bidang
miring dalam keadaan licin tiap perubahan jarak
tempuh.
Prosedur Kerja
Kegiatan 1: Hubungan antara gaya normal dengan gaya gesekan
1. Menarik balok dengan neraca pegas seperti pada
gambar di bawah ini
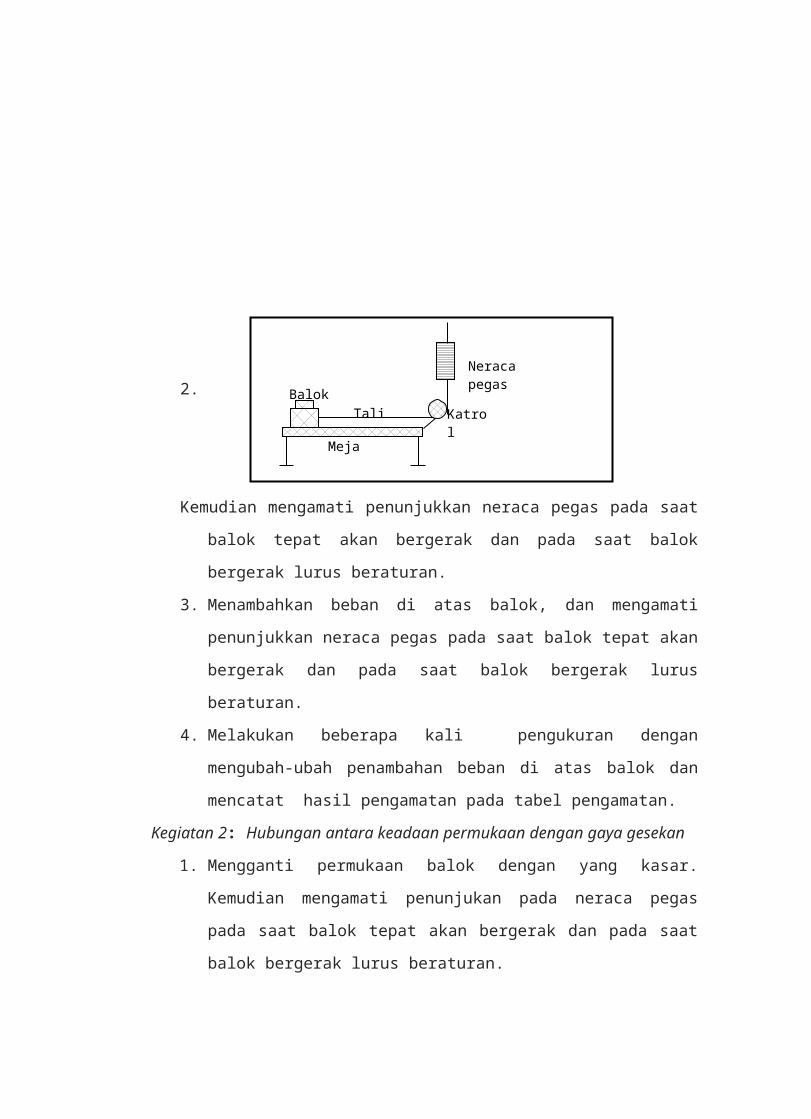
2.
Kemudian mengamati penunjukkan neraca pegas pada saat
balok tepat akan bergerak dan pada saat balok
bergerak lurus beraturan.
3. Menambahkan beban di atas balok, dan mengamati
penunjukkan neraca pegas pada saat balok tepat akan
bergerak dan pada saat balok bergerak lurus
beraturan.
4. Melakukan beberapa kali pengukuran dengan
mengubah-ubah penambahan beban di atas balok dan
mencatat hasil pengamatan pada tabel pengamatan.
Kegiatan 2: Hubungan antara keadaan permukaan dengan gaya gesekan
1. Mengganti permukaan balok dengan yang kasar.
Kemudian mengamati penunjukan pada neraca pegas
pada saat balok tepat akan bergerak dan pada saat
balok bergerak lurus beraturan.
Balok
Meja
Neraca pegas
Katrol
Tali
2. Melakukan kegiatan ini beberapa kali dengan
mengganti permukaan balok dengan yang agak kasar
dan licin.
3. Mencatat hasil pengamatan pada tabel pengamatan.
Kegiatan 3: Menentukan koefisien gesekan statik pada bidang miring
1. Menyiapkan alat dan bahan yang dibutuhkan yaitu
balok dengan stecker penyambung, bidang miring, dan
beban tambahan.
2. Meletakkan bidang di atas meja dengan posisi
mendatar ( = 0).
3. Meletakkan balok persegi di salah satu ujung bidang
tersebut.
4. Mengangkat secara perlahan ujung bidang tempat
balok persegi berada sehingga sudut kemiringan
bidang bertambah. Kemudian mencatat sudut
kemiringan bidang pada saat benda tepat akan
bergerak.
5. Mengulangi kegiatan (4) dengan menambah beban pada
balok persegi hingga diperoleh sedikitnya 5 (lima)
data pengukuran sudut.
Kegiatan 4: Menentukan koefisien gesekan kinetik pada bidang miring
1. Mengatur kemiringan bidang dengan sudut yang lebih
besar dari sudut kritis (c) yang telah anda peroleh
pada bagian 1 di atas untuk balok persegi tanpa
beban tambahan. Mencatat sudut kemiringan ini
sebagai .
2. Metakkan balok di ujung atas bidang yang telah anda
ketahui panjangnya.
3. Melepaskan balok bersamaan dengan menjalankan
stopwacth untuk mengukur waktu tempuh balok persegi
bergerak lurus berubah beraturan hingga ke ujung
bawah bidang. Kemudian mencatat waktu tempuh ini
sebagai t1.
4. Mengulangi kegiatan (3) dengan pengubahan jarak
tempuh hingga diperoleh 9 (sembilan) pasangan data
jarak dan waktu tempuh.
HASIL EKSPERIMEN DAN ANALISIS DATA
Hasil Pengamatan
Kegiatan 1: Hubungan antara gaya normal dengan gaya gesekan
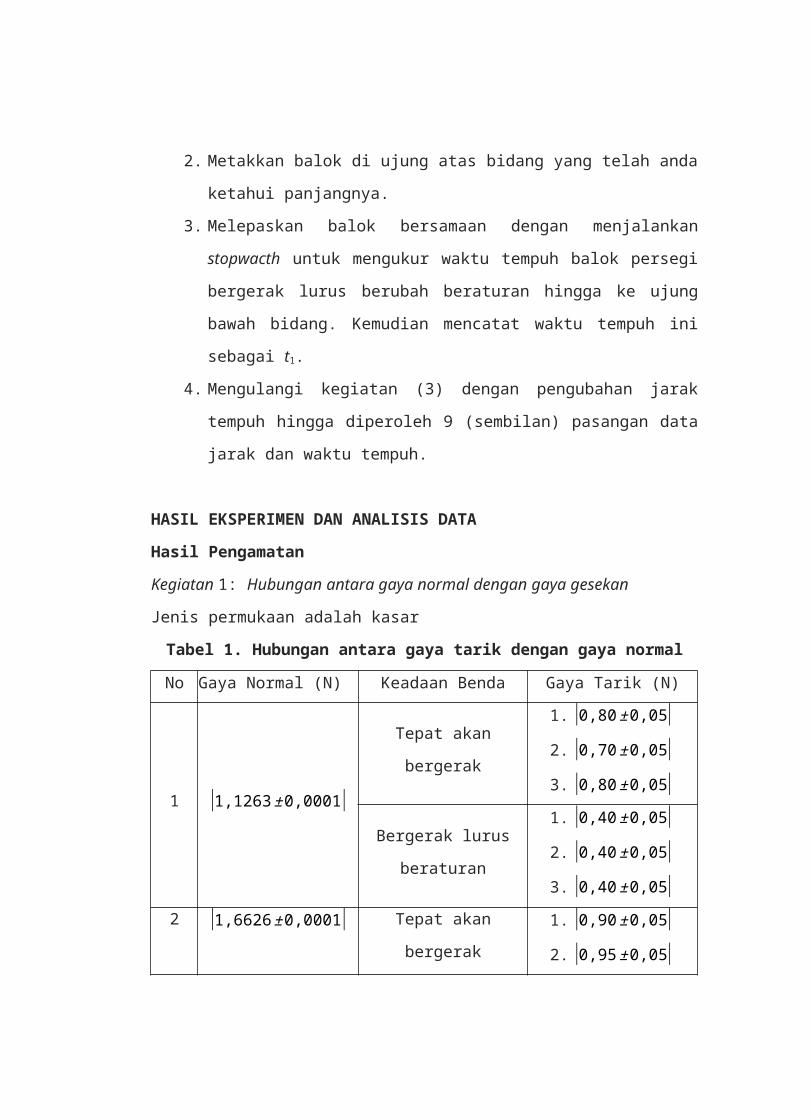
Jenis permukaan adalah kasar
Tabel 1. Hubungan antara gaya tarik dengan gaya normal
No Gaya Normal (N) Keadaan Benda Gaya Tarik (N)
1 |1,1263±0,0001|
Tepat akan
bergerak
1. |0,80±0,05|
2. |0,70±0,05|
3. |0,80±0,05|
Bergerak lurus
beraturan
1. |0,40±0,05|
2. |0,40±0,05|
3. |0,40±0,05|2 |1,6626±0,0001| Tepat akan
bergerak1. |0,90±0,05|
2. |0,95±0,05|
3. |0,80±0,05|
Bergerak lurus
beraturan
1. |0,60±0,05|
2. |0,60±0,05|
3. |0,60±0,05|
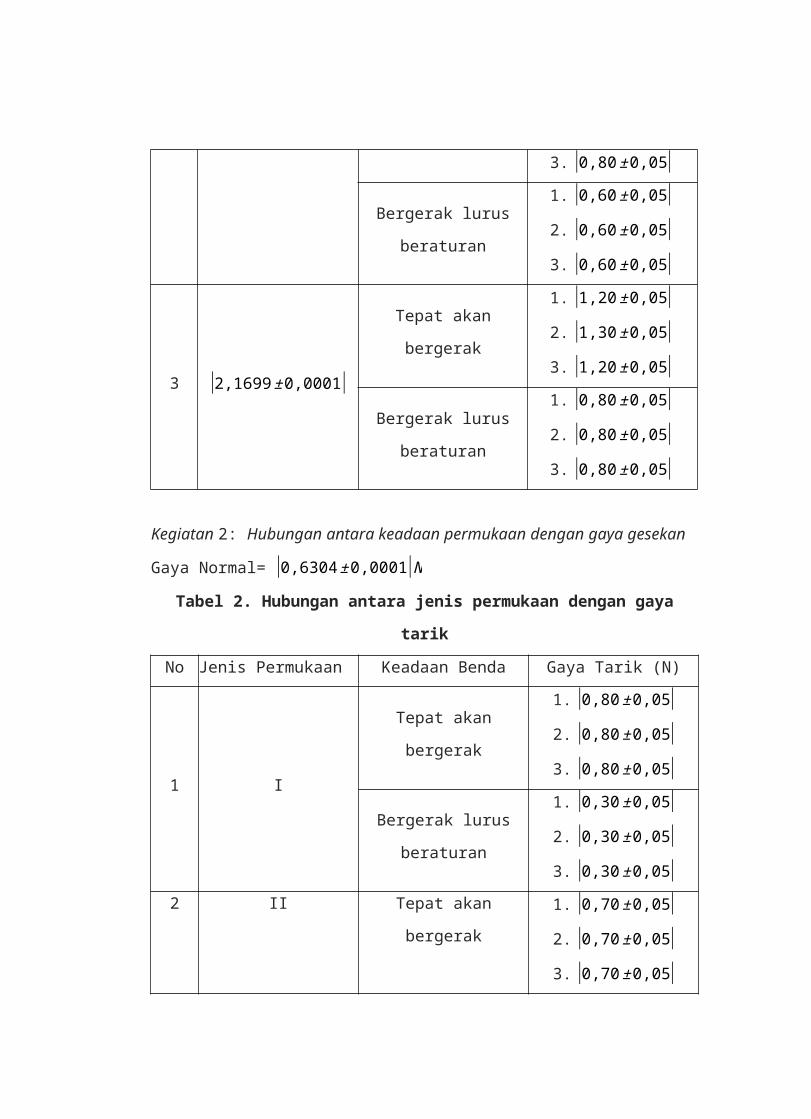
3 |2,1699±0,0001|
Tepat akan
bergerak
1. |1,20±0,05|
2. |1,30±0,05|
3. |1,20±0,05|
Bergerak lurus
beraturan
1. |0,80±0,05|
2. |0,80±0,05|
3. |0,80±0,05|
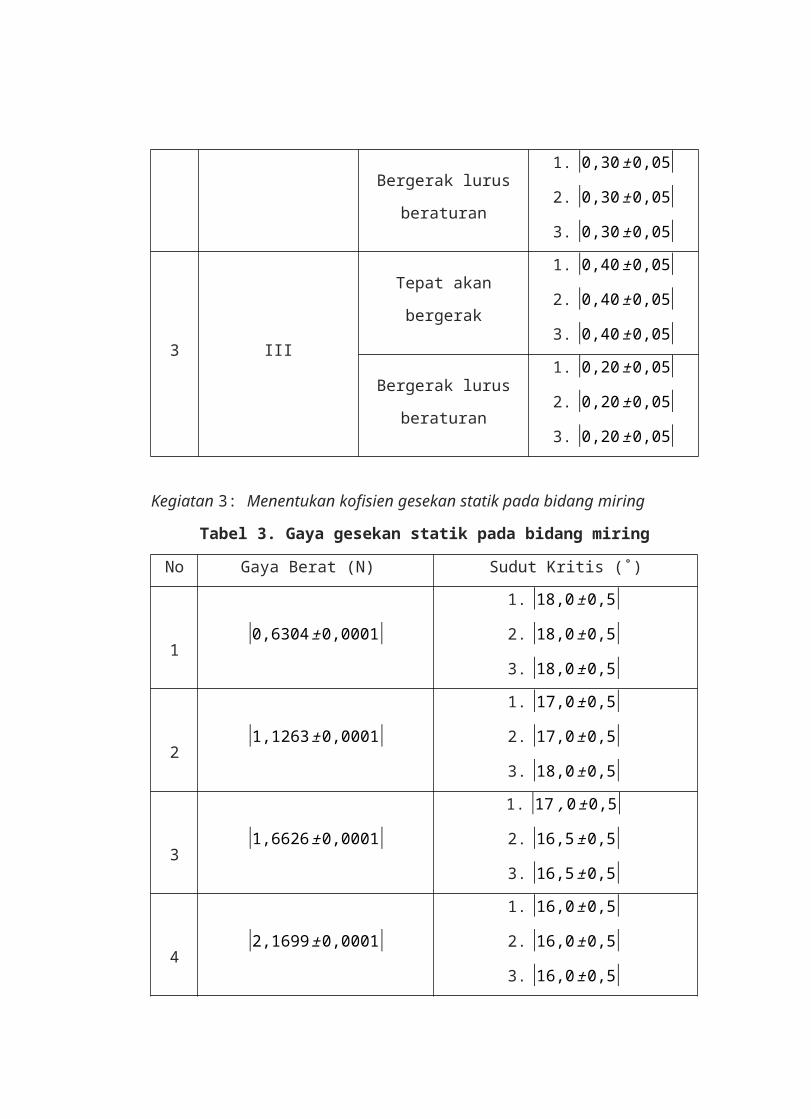
Kegiatan 2: Hubungan antara keadaan permukaan dengan gaya gesekan
Gaya Normal= |0,6304±0,0001|NTabel 2. Hubungan antara jenis permukaan dengan gaya
tarik
No Jenis Permukaan Keadaan Benda Gaya Tarik (N)
1 I
Tepat akan
bergerak
1. |0,80±0,05|
2. |0,80±0,05|
3. |0,80±0,05|
Bergerak lurus
beraturan
1. |0,30±0,05|
2. |0,30±0,05|
3. |0,30±0,05|2 II Tepat akan
bergerak1. |0,70±0,05|
2. |0,70±0,05|
3. |0,70±0,05|
Bergerak lurus
beraturan
1. |0,30±0,05|
2. |0,30±0,05|
3. |0,30±0,05|
3 III
Tepat akan
bergerak
1. |0,40±0,05|
2. |0,40±0,05|
3. |0,40±0,05|
Bergerak lurus
beraturan
1. |0,20±0,05|
2. |0,20±0,05|
3. |0,20±0,05|
Kegiatan 3: Menentukan kofisien gesekan statik pada bidang miring
Tabel 3. Gaya gesekan statik pada bidang miring
No Gaya Berat (N) Sudut Kritis (˚)
1|0,6304±0,0001|
1. |18,0±0,5|
2. |18,0±0,5|
3. |18,0±0,5|
2|1,1263±0,0001|
1. |17,0±0,5|
2. |17,0±0,5|
3. |18,0±0,5|
3|1,6626±0,0001|
1. |17,0±0,5|
2. |16,5±0,5|
3. |16,5±0,5|
4|2,1699±0,0001|
1. |16,0±0,5|
2. |16,0±0,5|
3. |16,0±0,5|
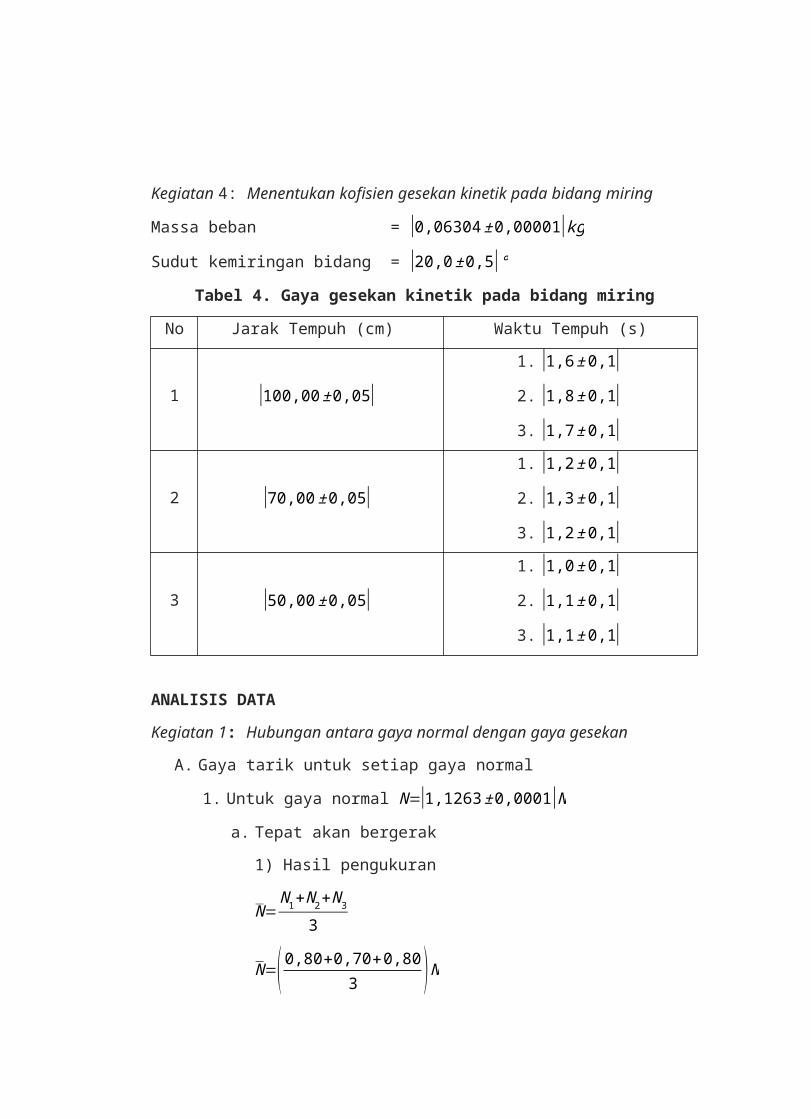
Kegiatan 4: Menentukan kofisien gesekan kinetik pada bidang miring
Massa beban = |0,06304±0,00001|kg
Sudut kemiringan bidang = |20,0±0,5|°Tabel 4. Gaya gesekan kinetik pada bidang miring
No Jarak Tempuh (cm) Waktu Tempuh (s)
1 |100,00±0,05|
1. |1,6±0,1|
2. |1,8±0,1|
3. |1,7±0,1|
2 |70,00±0,05|
1. |1,2±0,1|
2. |1,3±0,1|
3. |1,2±0,1|
3 |50,00±0,05|
1. |1,0±0,1|
2. |1,1±0,1|
3. |1,1±0,1|
ANALISIS DATA
Kegiatan 1: Hubungan antara gaya normal dengan gaya gesekan
A. Gaya tarik untuk setiap gaya normal
1. Untuk gaya normal N=|1,1263±0,0001|Na. Tepat akan bergerak
1) Hasil pengukuran
N=N1+N2+N3
3
N=(0,80+0,70+0,803 )N
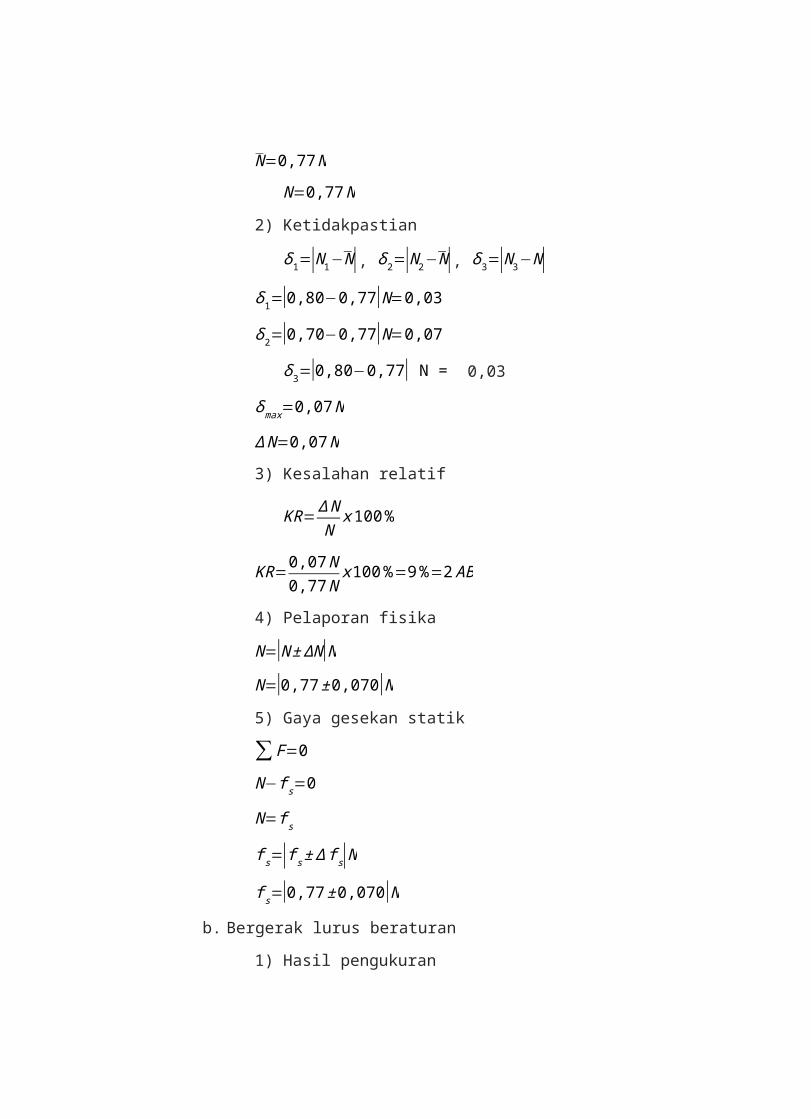
N=0,77NN=0,77N
2) Ketidakpastian
δ1=|N1−N|, δ2=|N2−N|, δ3=|N3−N|δ1=|0,80−0,77|N=0,03
δ2=|0,70−0,77|N=0,07
δ3=|0,80−0,77| N = 0,03
δmax=0,07N
∆N=0,07N3) Kesalahan relatif
KR=ΔNNx100%
KR=0,07N0,77N
x100%=9%=2AB
4) Pelaporan fisika
N=|N±ΔN|NN=|0,77±0,070|N5) Gaya gesekan statik
∑F=0
N−fs=0
N=fs
fs=|fs±Δfs|Nfs=|0,77±0,070|N
b. Bergerak lurus beraturan
1) Hasil pengukuran
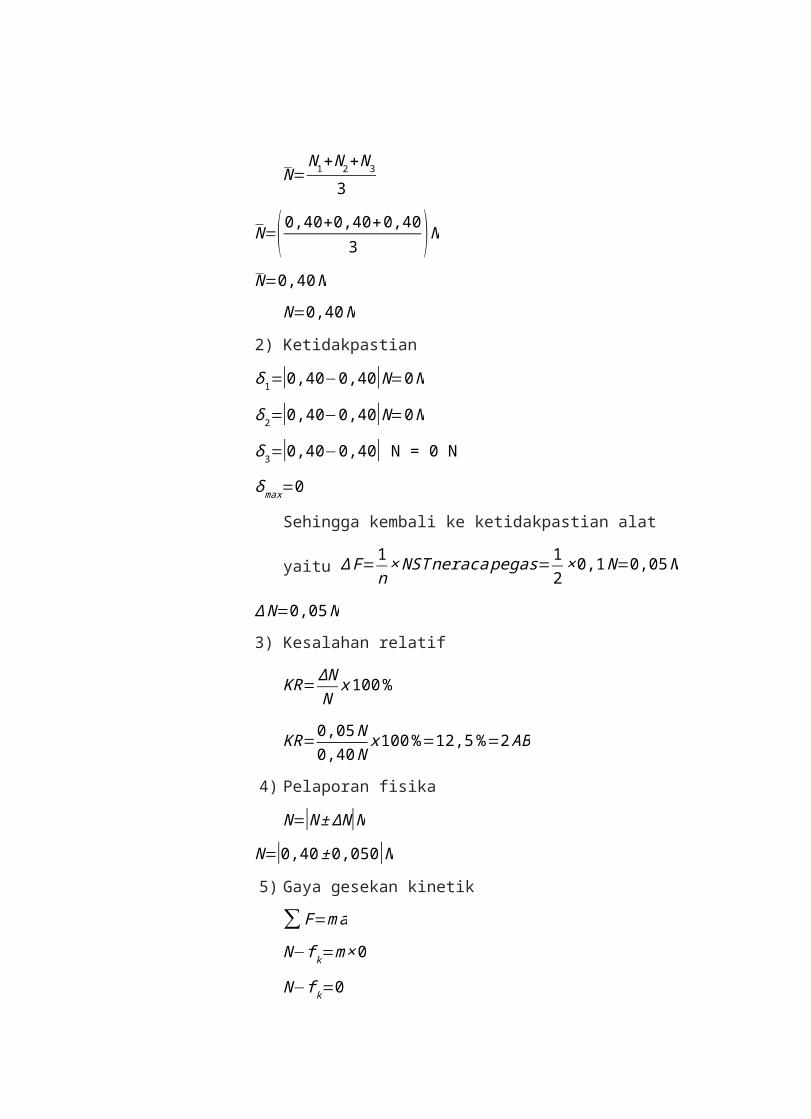
N=N1+N2+N3
3
N=(0,40+0,40+0,403 )N
N=0,40NN=0,40N
2) Ketidakpastian
δ1=|0,40−0,40|N=0N
δ2=|0,40−0,40|N=0N
δ3=|0,40−0,40| N = 0 N
δmax=0
Sehingga kembali ke ketidakpastian alat
yaitu ∆F=1n×NSTneracapegas=1
2×0,1N=0,05N
∆N=0,05N3) Kesalahan relatif
KR=ΔNNx100%
KR=0,05N0,40N
x100%=12,5%=2AB
4) Pelaporan fisika
N=|N±ΔN|NN=|0,40±0,050|N5) Gaya gesekan kinetik
∑F=maN−fk=m×0
N−fk=0
N=fk
fk=|fk±Δfk|Nfk=|0,40±0,050|N
2. Untuk gaya normal N=|1,6626±0,0001|Na. Tepat akan bergerak
1) Hasil pengukuran
N=(0,90+0,95+0,803 )N
N=0,88NN=0,88N
2) Ketidakpastian
δ1=|0,90−0,88|N=0,02N
δ2=|0,95−0,88|N=0,07N
δ3=|0,80−0,88| N = 0,08 N
δmax=0,08
∆N=0,08N3) Kesalahan relatif
KR=0,08N0,88N
x100%=9%=2AB
4) Pelaporan fisika
N=|0,88±0,080|N5) Gaya gesekan statik
fs=|0,88±0,050|N
b. Bergerak lurus beraturan
1) Hasil pengukuran
N=(0,60+0,60+0,603 )N
N=0,60NN=0,60N
2) Ketidakpastian
δ1=|0,60−0,60|N=0N
δ2=|0,60−0,60|N=0N
δ3=|0,60−0,60| N = 0 N
δmax=0
Sehingga kembali ke ketidakpastian alat
yaitu ∆F=1n×NSTneracapegas=1
2×0,1N=0,05N
∆N=0,05N3) Kesalahan relatif
KR=0,05N0,60N
x100%=8,3%=2AB
4) Pelaporan fisika
N=|0,60±0,050|N5) Gaya gesekan kinetik
fk=|0,60±0,050|N
3. Untuk gaya normal N=|2,1699±0,0001|Na. Tepat akan bergerak
1) Hasil pengukuran
N=(1,20+1,30+1,203 )N
N=1,23N
N=1,23N 2) Ketidakpastian
δ1=|1,20−1,23|N=0,03N
δ2=|1,30−1,23|N=0,07N
δ3=|1,20−1,23| N = 0,03 N
δmax=0,07
∆N=0,07N3) Kesalahan relatif
KR=0,07N1,23N
x100%=5,7%=2AB
4) Pelaporan fisika
N=|1,2±0,070|N5) Gaya gesekan statik
fs=|1,2±0,070|N
b. Bergerak lurus beraturan
1) Hasil pengukuran
N=(0,80+0,80+0,803 )N
N=0,80NN=0,80N
2) Ketidakpastian
δ1=|0,80−0,80|N=0N
δ2=|0,80−0,80|N=0N
δ3=|0,80−0,80| N = 0 N
δmax=0
Sehingga kembali ke ketidakpastian alat
yaitu ∆F=1n×NSTneracapegas=1
2×0,1N=0,05N
∆N=0,05N3) Kesalahan relatif
KR=0,05N0,80N
x100%=6,25%=2AB
4) Pelaporan fisika
N=|0,80±0,050|N5) Gaya gesekan kinetik
fk=|0,80±0,050|N
B. Hubungan antara gaya normal dengan gaya gesekan
statik
1. Tabel hubungan antara gaya normal dengan gaya
gesekan statikGaya Normal (N) Gaya gesekan (N)
|1,1263±0,0001| |0,77±0,070||1,6626±0,0001| |0,88±0,050|
|2,1699±0,0001| |1,2±0,070|
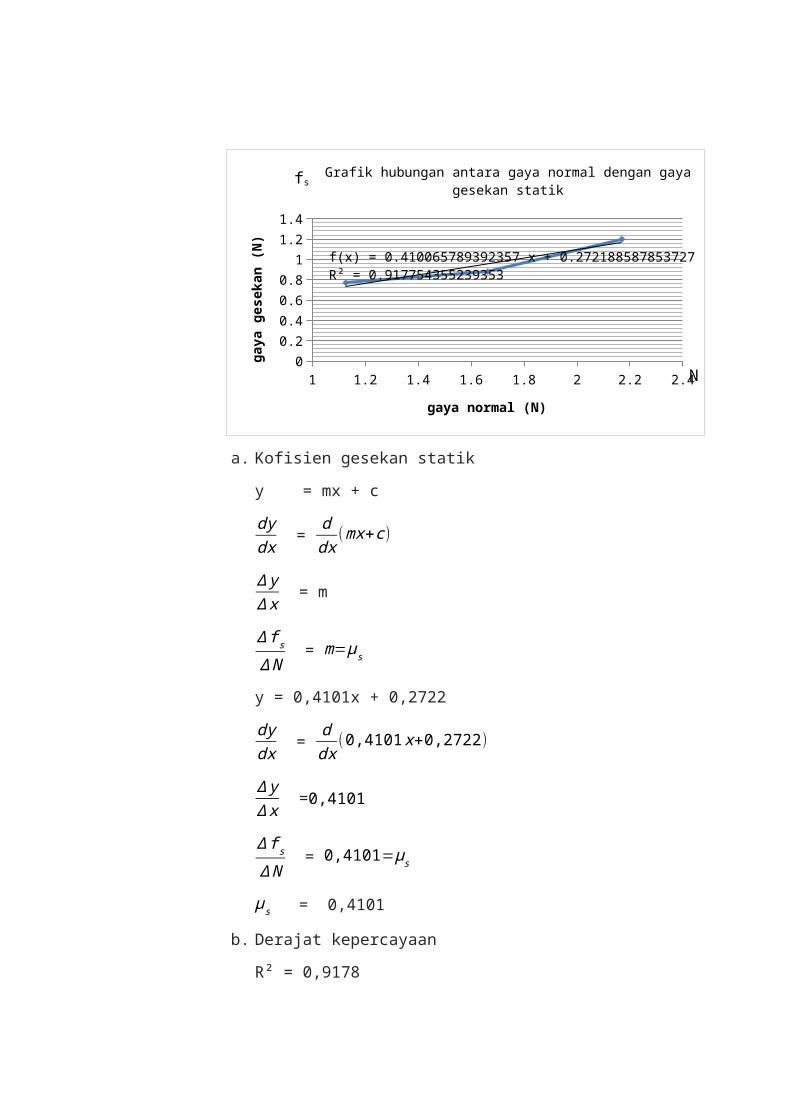
2. Grafik hubungan antara gaya normal dengan gaya
gesekan statik
1 1.2 1.4 1.6 1.8 2 2.2 2.40
0.20.40.60.81
1.21.4
f(x) = 0.410065789392357 x + 0.272188587853727R² = 0.917754355239353
Grafik hubungan antara gaya normal dengan gaya gesekan statik
gaya normal (N)
gaya
ges
ekan
(N)
a. Kofisien gesekan statik
y = mx + c
dydx =
ddx
(mx+c)
∆y∆x = m
∆fs
∆N = m=μs
y = 0,4101x + 0,2722
dydx =
ddx
(0,4101x+0,2722)
∆y∆x =0,4101
∆fs
∆N = 0,4101=μs
μs = 0,4101
b. Derajat kepercayaan
R² = 0,9178
fs
N
DK = R2 × 100 %
DK = 0,9178 × 100 %
DK = 91,78 %
c. Kesalahan relatif
KR= 100 % - DK
KR= 100 % - 91,78 %
KR= 8,22 % (2 AB)
d. Ketidakpastian
∆μs = KR×μs100%
∆μs= 0,1×0,4101
100%
∆μs= 0,0004101
e. Pelaporan fisika
μs=|μs±∆μs|μs=|0,41±0,00041|
C. Hubungan antara gaya normal dengan gaya gesekan
kinetik
1. Tabel hubungan antara gaya normal dengan gaya
gesekan kinetikGaya Normal(N) Gaya gesekan(N)
|1,1263±0,0001| |0,40±0,050||1,6626±0,0001| |0,60±0,050||2,1699±0,0001| |0,80±0,050|
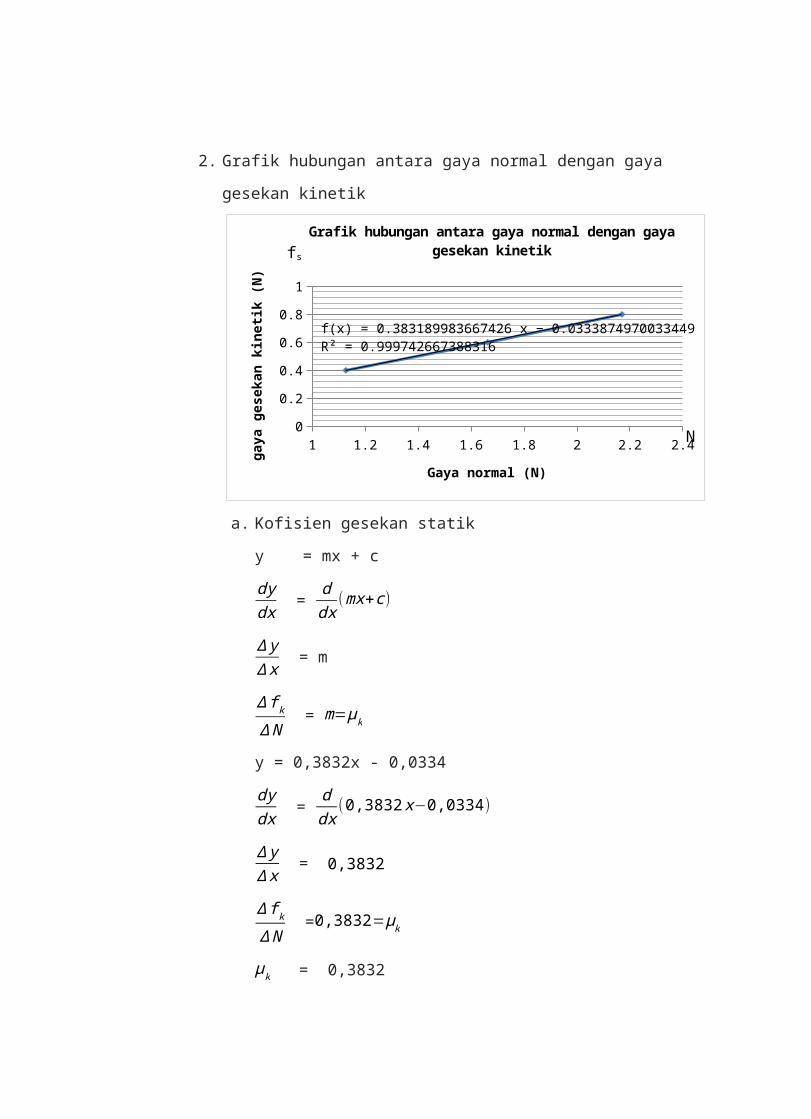
2. Grafik hubungan antara gaya normal dengan gaya
gesekan kinetik
1 1.2 1.4 1.6 1.8 2 2.2 2.40
0.2
0.4
0.6
0.8
1
f(x) = 0.383189983667426 x − 0.0333874970033449R² = 0.999742667388316
Grafik hubungan antara gaya normal dengan gaya gesekan kinetik
Gaya normal (N)
gaya
ges
ekan
kin
etik (
N)
a. Kofisien gesekan statik
y = mx + c
dydx =
ddx
(mx+c)
∆y∆x = m
∆fk
∆N = m=μk
y = 0,3832x - 0,0334
dydx =
ddx
(0,3832x−0,0334)
∆y∆x = 0,3832
∆fk
∆N =0,3832=μk
μk = 0,3832
fs
N

b. Derajat kepercayaan
R² = 0,9997
DK = R2 × 100 %
DK = 0,999 × 100 %
DK = 99,9 %
c. Kesalahan relatif
KR= 100 % - DK
KR= 100 % - 99,9 %
KR= 0,1 % (4 AB)
d. Ketidakpastian
∆μk=KR×μk100%
∆μk=0,1×0,3832
100%∆μk=0,0003832
e. Pelaporan fisika
μk=|μk±∆μk|μk=|0,3832±0,0003832|
Kegiatan 2: Hubungan antara keadaan permukaan dengan gaya gesekan
A. Gaya tarik untuk setiap jenis permukaan
1. Jenis permukaan kasar
a. Tepat akan bergerak
1) Hasil pengukuran
F=F1+F2+F3
3
F=(0,80+0,80+0,803 )N
F=(2,403 )NF=0,80N
F=0,80N 2) Ketidakpastian
δ1=|F1−F|, δ2=|F2−F|, δ3=|F3−F|δ1=|0,80−0,80|N=0
δ2=|0,80−0,80|N=0
δ3=|0,80−0,80| N = 0
δmax=0N
Sehingga kembali ke ketidakpastian alat
yaitu ∆F=1n×NSTneracapegas=1
2×0,1N=0,05N
∆F=0,05N3) Kesalahan relatif
KR=ΔFFx100%
KR=0,05N0,80N
x100%=6,25%=2AB
4) Pelaporan fisika
F=|F±ΔF|NF=|0,80±0,050|N5) Gaya gesekan statik
∑F=0
F−fs=0
F=fs
fs=|fs±Δfs|Nfs=|0,80±0,050|N
b. Bergerak lurus beraturan
1) Hasil pengukuran
F=F1+F2+F3
3
F=(0,30+0,30+0,303 )N
F=(0,903 )NF=0,30N
F=0,30N 2) Ketidakpastian
δ1=|0,30−0,30|N=0N
δ2=|0,30−0,30|N=0N
δ3=|0,30−0,30| N = 0 N
δmax=0
Sehingga kembali ke ketidakpastian alat
yaitu ∆F=1n×NSTneracapegas=
12×0,1N=0,05N
∆F=0,05N3) Kesalahan relatif
KR=ΔFFx100%
KR=0,05N0,30N
x100%=16,7%=2AB
4) Pelaporan fisika
F=|F±ΔF|NF=|0,30±0,050|N5) Gaya gesekan kinetik
∑F=maF−fk=m×0
F−fk=0
F=fk
fk=|fk±Δfk|Nfk=|0,30±0,050|N
2. Jenis permukaan agak kasar
a. Tepat akan bergerak
1) Hasil pengukuran
F=(0,70+0,70+0,703 )N
F=(2,103 )NF=0,70N
F=0,70N 2) Ketidakpastian
δ1=|0,70−0,70|N=0N
δ2=|0,70−0,70|N=0N
δ3=|0,70−0,70| N = 0 N
δmax=0

Sehingga kembali ke ketidakpastian alat
yaitu ∆F=1n×NSTneracapegas=1
2×0,1N=0,05N
∆F=0,05N3) Kesalahan relatif
KR=0,05N0,70N
x100%=7,1%=2AB
4) Pelaporan fisika
F=|0,70±0,050|N5) Gaya gesekan statik
fs=|0,70±0,050|N
b. Bergerak lurus beraturan
1) Hasil pengukuran
F=(0,30+0,30+0,303 )N
F=(0,903 )NF=0,30N
F=0,30N 2) Ketidakpastian
δ1=|0,30−0,30|N=0N
δ2=|0,30−0,30|N=0N
δ3=|0,30−0,30| N = 0 N
δmax=0
Sehingga kembali ke ketidakpastian alat
yaitu ∆F=1n×NSTneracapegas=1
2×0,1N=0,05N
∆F=0,05N3) Kesalahan relatif
KR=0,05N0,30N
x100%=16,7%=2AB
4) Pelaporan fisikaa
F=|0,30±0,050|N5) Gaya gesekan kinetik
fk=|0,30±0,050|N
3. Jenis permukaan licin
a. Tepat akan bergerak
1) Hasil pengukuran
F=(0,40+0,40+0,403 )N
F=(1,203 )NF=0,40N
F=0,40N 2) Ketidakpastian
δ1=|0,40−0,40|N=0N
δ2=|0,40−0,40|N=0N
δ3=|0,40−0,40| N = 0 N
δmax=0
Sehingga kembali ke ketidakpastian alat
yaitu ∆F=1n×NSTneracapegas=1
2×0,1N=0,05N
∆F=0,05N
3) Kesalahan relatif
KR=0,05N0,40N
x100%=12,5%=2AB
4) Pelaporan fisika
F=|0,40±0,05|N5) Gaya gesekan statik
fs=|0,40±0,05|N
b. Bergerak lurus beraturan
1) Hasil pengukuran
F=(0,20+0,20+0,203 )N
F=(0,603 )NF=0,20N
F=0,20N 2) Ketidakpastian
δ1=|0,20−0,20|N=0N
δ2=|0,20−0,20|N=0N
δ3=|0,20−0,20| N = 0 N
δmax=0
Sehingga kembali ke ketidakpastian alat
yaitu ∆F=1n×NSTneracapegas=1
2×0,1N=0,05N
∆F=0,05N3) Kesalahan relatif
KR=0,05N0,20N
x100%=25 %=2AB

4) Pelaporan fisika
F=|0,20±0,05|N5) Gaya gesekan kinetik
fk=|0,20±0,05|N
Kegiatan 3: Menentukan koefisien gesekan statik pada bidang miring
A. Menghitung rata-rata sudut kritis dari masing-masing
gaya berat:
1. Untuk gaya berat W = |0,6304±0,0001|a. Sudut kritis
θc1 = 18,0 0
θc2 = 18,0 0
θc2 = 18,0 0
θc=θc1+θc2+θc3
3
θc=18,0°+18,0°+18,0°
3θc=18,0 0
b. Ketidakpastian
δ1=|θ1−θc|, δ2=|θ2−θc|, δ3=|θ3−θc|δ1=|18,0−18,0|°=0
δ2=|18,0−18,0|°=0
δ3=|18,0−18,0|° = 0
δmax=0
∆θc=0
Karena δmax=0 bernilai nol maka harus kembali
ke NST alat, dimana NST dari mistar busur
adalah 0,5 0. sehingga ∆θc = 0,5 0
c. Kesalahan relatif
KR=Δθθx100%
KR=0,5°18,0°
×100%=2,7%=3AB.
d. Pelaporan fisika
θc=|θc±Δθ|°θc=|18,0±0,500|°
2. Untuk gaya berat = |1,1263±0,0001|a. Sudut kritis
θc1 = 17,0 0
θc2 = 17,0 0
θc2 = 18,0 0
θc=17,0°+17,0°+18,0°
3θc=17,3°
b. Ketidakpastian
δ1=|17,0−17,3|°=0,3°
δ2=|17,0−17,3|°=0,3°
δ3=|18,0−17,3|° = 0,7°
δmax=0,7°
∆θc=0,7°
c. Kesalahan relatif
KR= 0,7°17,3°
×100%=4,04%=3AB.
d. Pelaporan fisika
θc=|17,3±0,700|°
3. Untuk gaya berat W = |1,6626±0,0001|a. Sudut kritis
θc1 = 17,0 0
θc2 = 16,5 0
θc2 = 16,5 0
θc=17,0°+16,5°+16,5°
3θc=16,7°
b. Ketidakpastian
δ1=|17,0−16,7|°=0,3°
δ2=|16,5−16,7|°=0,2°
δ3=|16,5−16,7|° = 0,2°
δmax=0,3°
∆θc=0,3°
c. Kesalahan relatif
KR=0,3°16,7°
×100%=1,8%=3AB.
d. Pelaporan fisika
θc=|16,7±0,300|°
4. Untuk gaya berat = |2,1669±0,0001|a. Sudut kritis

θc1 = 16,0 0
θc2 = 16,0 0
θc2 = 16,0 0
θc=16,0°+16°+16°
3θc=16°
b. Ketidakpastian
δ1=|16,0−16,0|°=0
δ2=|16,0−16,0|°=0
δ3=|16,0−16,0|° = 0
δmax=0
Karena δmax bernilai nol maka harus kembali ke
NST alat, dimana NST dari mistar busur adalah
0,5 0. sehingga ∆θc = 0,5 0
c. Kesalahan relatif
KR=0,5°16,0°
×100%=3,1%=3AB.
d. Pelaporan fisika
θ=|16,0±0,500|°B. Koefisien gesekan statik untuk setiap sudut kritis
beserta analisis ketidakpastiannya.
1. Untuk gaya berat W = |0,6304N±0,0001|Na. Kofisien gesekan statik
μs=tanθ
μs=tan18,00°=0,32
b. Ketidakpastian
∆θc=∆θc× π180°
∆θc=0,5°× 3,14180°
=0,0087
μs=tanθ
dμs=|∂μs∂θ |dθdμs=|sec2θ|dθ
dμsμs
=| 1cos2θsinθcosθ |dθ
dμsμs
=| 1cosθsinθ|dθ
∆μsμs
=| ∆θcosθsinθ|
∆μs=| ∆θcosθsinθ|μs
∆μs=| 0,0087cos18,0°sin18,0°|0,32
∆μs=| 0,00870,95×0,31|0,32
∆μs=|0,00870,2945|0,32=|0,0295|0,32=0,00944
c. Kesalahan relatif
KR=∆μsμs
×100%
KR=0,009440,32
×100%=2,95%=3AB
d. Pelaporan fisika
μs=|μs±∆μs|
μs=|0,320±0,00944|
2. Untuk gaya berat W=|1,1263±0,0001|Na. Kofisien gesekan statik
μs=tan17,3°=0,31
b. Ketidakpastian
∆θc=0,7°× 3,14180°
=0,012
∆μs=| 0,012cos18,0°sin18,0°|0,31
∆μs=| 0,0120,95×0,30|0,31
∆μs=|0,0120,285|0,31=|0,042|0,31=0,013
c. Kesalahan relatif
KR=0,0130,31
×100%=4,2 %=3AB
d. Pelaporan fisika
μs=|0,310±0,0310|

3. Untuk gaya berat W=|1,6626±0,0001|Na. Kofisien gesekan statik
μs=tan16,7°=0,3
b. Ketidakpastian
∆θc=0,3°× 3,14180°
=0,0052
∆μs=| 0,0052cos16,7°sin16,7°|0,3
∆μs=| 0,00520,96×0,29|0,3
∆μs=|0,00520,28 |0,3=|0,0186|0,3=0,00558
c. Kesalahan relatif
KR=0,00558
0,3×100%=1,86%=3AB
d. Pelaporan fisika
μs=|0,300±0,00588|
4. Untuk gaya berat W=|2,1699±0,0001|N a. Kofisien gesekan statik
μs=tan16,0°=0,29
b. Ketidakpastian
∆θc=0,5°× 3,14180°
=0,0087
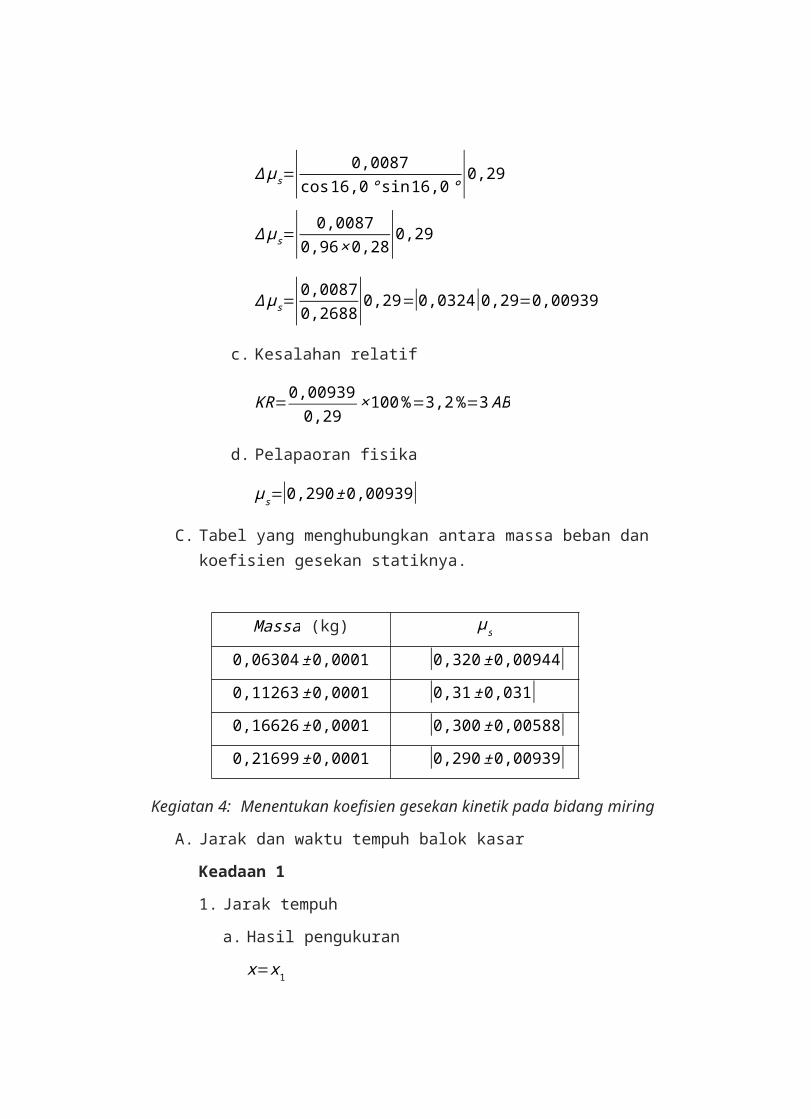
∆μs=| 0,0087cos16,0°sin16,0°|0,29
∆μs=| 0,00870,96×0,28|0,29
∆μs=|0,00870,2688|0,29=|0,0324|0,29=0,00939
c. Kesalahan relatif
KR=0,009390,29
×100%=3,2%=3AB
d. Pelapaoran fisika
μs=|0,290±0,00939|
C. Tabel yang menghubungkan antara massa beban dan koefisien gesekan statiknya.
Massa (kg) μs
0,06304±0,0001 |0,320±0,00944|0,11263±0,0001 |0,31±0,031|0,16626±0,0001 |0,300±0,00588|0,21699±0,0001 |0,290±0,00939|
Kegiatan 4: Menentukan koefisien gesekan kinetik pada bidang miring
A. Jarak dan waktu tempuh balok kasar
Keadaan 1
1. Jarak tempuh
a. Hasil pengukuran
x=x1
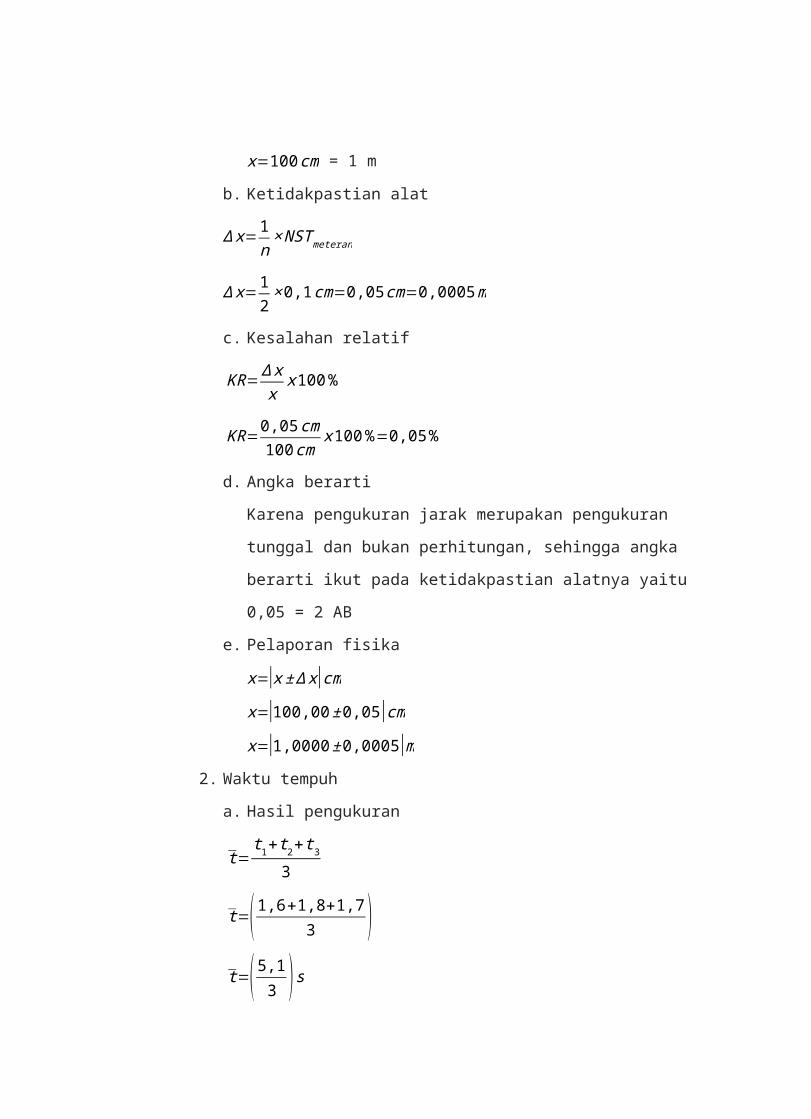
x=100cm = 1 mb. Ketidakpastian alat
∆x=1n×NSTmeteran
∆x=12×0,1cm=0,05cm=0,0005m
c. Kesalahan relatif
KR=Δxxx100%
KR=0,05cm100cm
x100%=0,05%
d. Angka berarti
Karena pengukuran jarak merupakan pengukuran
tunggal dan bukan perhitungan, sehingga angka
berarti ikut pada ketidakpastian alatnya yaitu
0,05 = 2 AB
e. Pelaporan fisika
x=|x±Δx|cmx=|100,00±0,05|cmx=|1,0000±0,0005|m
2. Waktu tempuh
a. Hasil pengukuran
t=t1+t2+t3
3
t=(1,6+1,8+1,73 )
t=(5,13 )s
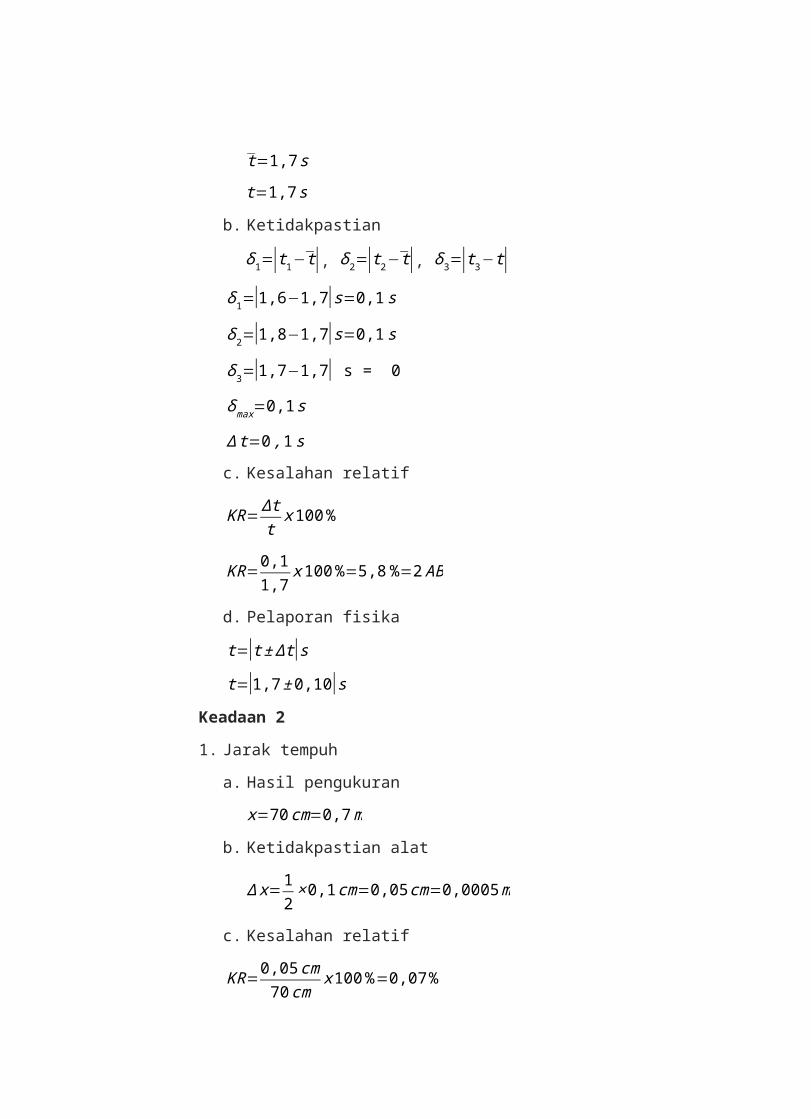
t=1,7st=1,7s
b. Ketidakpastian
δ1=|t1−t|, δ2=|t2−t|, δ3=|t3−t|δ1=|1,6−1,7|s=0,1s
δ2=|1,8−1,7|s=0,1s
δ3=|1,7−1,7| s = 0
δmax=0,1s
∆t=0,1sc. Kesalahan relatif
KR=Δttx100%
KR=0,11,7
x100%=5,8 %=2AB
d. Pelaporan fisika
t=|t±Δt|st=|1,7±0,10|s
Keadaan 2
1. Jarak tempuh
a. Hasil pengukuran
x=70cm=0,7m b. Ketidakpastian alat
∆x=12×0,1cm=0,05cm=0,0005m
c. Kesalahan relatif
KR=0,05cm70cm
x100%=0,07%
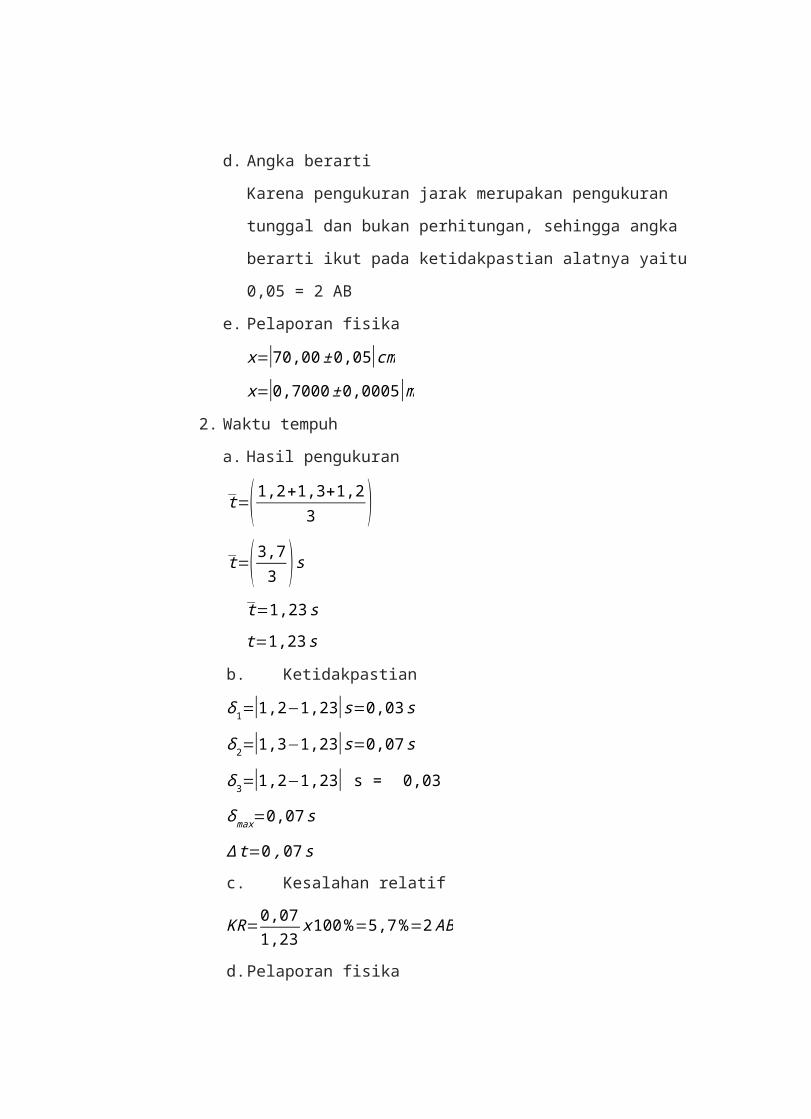
d. Angka berarti
Karena pengukuran jarak merupakan pengukuran
tunggal dan bukan perhitungan, sehingga angka
berarti ikut pada ketidakpastian alatnya yaitu
0,05 = 2 AB
e. Pelaporan fisika
x=|70,00±0,05|cmx=|0,7000±0,0005|m
2. Waktu tempuh
a. Hasil pengukuran
t=(1,2+1,3+1,23 )
t=(3,73 )st=1,23st=1,23s
b. Ketidakpastian
δ1=|1,2−1,23|s=0,03s
δ2=|1,3−1,23|s=0,07s
δ3=|1,2−1,23| s = 0,03
δmax=0,07s
∆t=0,07sc. Kesalahan relatif
KR=0,071,23
x100%=5,7%=2AB
d.Pelaporan fisika
t=|t±Δt|st=|1,2±0,070|s
Keadaan 3
1. Jarak tempuh
a. Hasil pengukuran
x=50cm=0,5m b. Ketidakpastian alat
∆x=12×0,1cm=0,05cm=0,0005m
c. Kesalahan relatif
KR=Δxxx100%
KR=0,05cm50cm
x100%=0,1%
d. Angka berarti
Karena pengukuran jarak merupakan pengukuran
tunggal dan bukan perhitungan, sehingga angka
berarti ikut pada ketidakpastian alatnya yaitu
0,05 = 2 AB
e. Pelaporan fisika
x=|50,00±0,05|cmx=|0,5000±0,0005|m
2. Waktu tempuh
a. Hasil pengukuran
t=(1,0+1,1+1,13 )

t=(3,23 )st=1,07st=1,07s
b. Ketidakpastian
δ1=|1,0−1,07|s=0,07s
δ2=|1,1−1,07|s=0,03s
δ3=|1,1−1,07| s = 0,03
δmax=0,07s
∆t=0,07sc. Kesalahan relatif
KR=0,071,07
x100%=6,5%=2AB
d.Pelaporan fisika
t=|t±Δt|st=|1,1±0,070|s
B. Grafik hubungan antara jarak tempuh dengan kuadrat
waktu tempuh
1. Tabel hubungan antara jarak tempuh dan waktu
tempuh
Jarak tempuh
(cm)
Waktu tempuh
(s)
|100−0,05| |1,70−0,10|
|70−0,05| |1,23−0,10|
|50−0,05| |1,07−0,10|
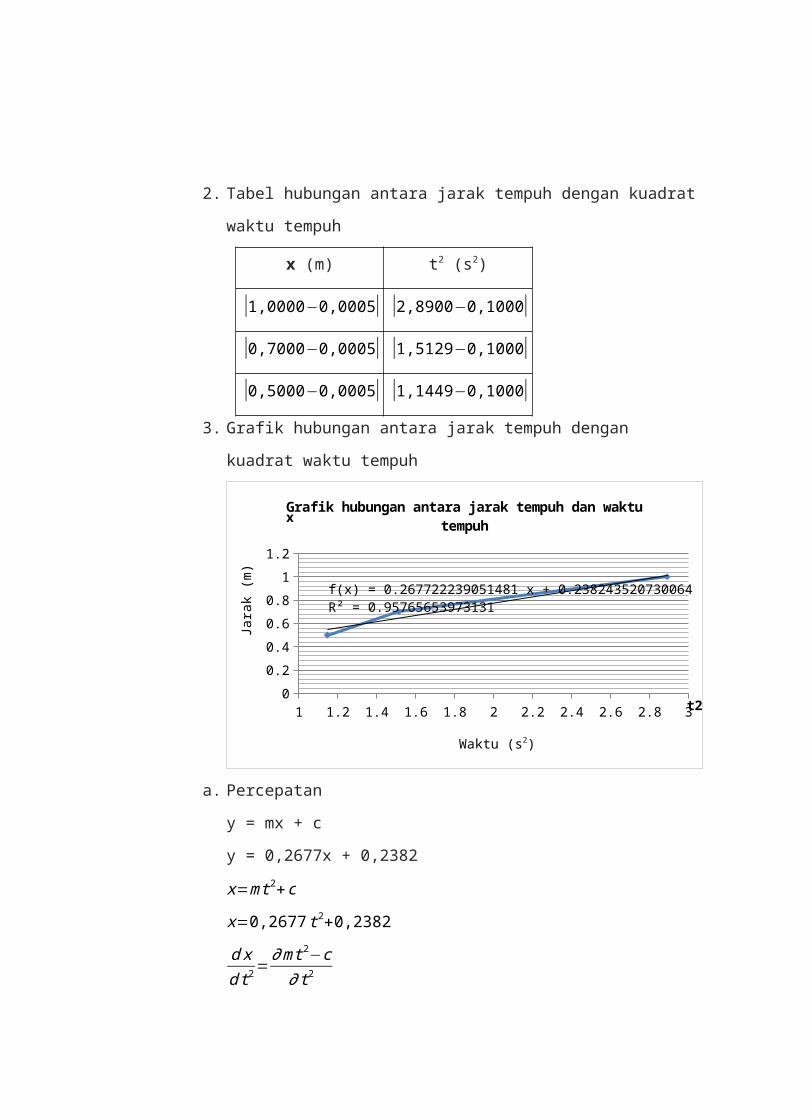
2. Tabel hubungan antara jarak tempuh dengan kuadrat
waktu tempuh
x (m) t2 (s2)
|1,0000−0,0005| |2,8900−0,1000|
|0,7000−0,0005| |1,5129−0,1000|
|0,5000−0,0005| |1,1449−0,1000|
3. Grafik hubungan antara jarak tempuh dengan
kuadrat waktu tempuh
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 30
0.20.40.60.81
1.2
f(x) = 0.267722239051481 x + 0.238243520730064R² = 0.95765653973131
Grafik hubungan antara jarak tempuh dan waktu tempuh
t2
x
a. Percepatan
y = mx + c
y = 0,2677x + 0,2382
x=mt2+cx=0,2677t2+0,2382
dxdt2
=∂mt2−c∂t2
Jarak (m)
Waktu (s2)
dxdt2
=m
∆x∆t2
=m=a=0,2677m /s2
b. Derajat Kepercayaan
R² = 0,9577
DK=R2×100%DK=0,9577×100%=95,77%
c. Kesalahan Relatif
KR=100%−DKKR=100%−95,77%=4,24%=3AB
d. Ketidakpastian
KR=∆aa×100 %
∆a=a× KR100%
∆a=0,2677m /s2×0,0424=0,01135m /s2
e. Pelaporan fisika
a=|a±∆a|m /s2
a=|0,268±0,0114|m /s2
C. Kofisien gesekan kinetik pada bidang miring
1. Kofisien gesekan kinetik
ax=g (sinθ−μkcosθ )ax−gsinθ=−gμkcosθ
gμkcosθ=−(ax−gsinθ)
μk=gsinθ−axgcosθ
μk=tanθ−ax
gcosθ
μk=tan20°−0,2677m /s2
10m /s2cos20°
μk=0,36397−0,2677m /s2
9,4m /s2
μk=0,36397−0,02848=0,34122
2. Kesalahan relatif
θ=20°=20°× π180°
=20°× 3,14180°
=0,35
ax=g (sinθ−μkcosθ )gμkcosθ=gsinθ−ax
μk=gsinθ−axgcosθ
karenagmerupakanketetapan,makatidakditurunkansehingga:
μk=sinθ−axcosθ
dμk=|∂μk
∂ax|dax+|∂μk
∂θ |dθdμk=| −1
cosθ|dax+|(cosθ−1).cosθ−(sinθ−ax ) (−sinθ )cos2θ |dθ
dμk=| −1cosθ|dax+|cos2θ−cosθ+sin2θ−axsinθ
cos2θ |dθdμk=| −1
cosθ|dax+|cos2θ+sin2θ−cosθ−axsinθcos2θ |dθ
dμk=| −1cosθ|dax+|1−cosθ−axsinθ
cos2θ |dθ
dμkμk
=| −1cosθ
sinθ−axcosθ
|dax+|1−cosθ−axsinθcos2θ
sinθ−ax
cosθ|dθ
∆μkμk
={| −1sinθ−ax|∆ax+|1−cosθ−axsinθ
cosθ (sinθ−ax) |∆θ}∆μk={| ∆ax
sinθ−ax|+|(1−cosθ−axsinθ)∆θcosθ (sinθ−ax) |}μk
∆μk={| 0,01135m /s2
sin0,35−0,2677m /s2|+|(1−cos0,35−0,2677m /s2sin0,35)0,5°cos0,35 (sin0,35−0,2677m /s2 ) |}0,34122
∆μk={| 0,01135m /s2
0,006−0,2677m /s2|+|(1−1−0,2677m /s2.0,006 )0,5°1 (0,006−0,2677m /s2 ) |}0,34122
∆μk={|0,01135−0,2617|+|(−0,0016 )0,51 (−0,2617) |}0,34122
∆μk={|0,0434|+|0,00080,2617|}0,34122∆μk={|0,0434|+|0,0031|}0,34122∆μk=|0,0465|0,34122=0,0159
3. Kesalahan relatif
KR=∆μkμk
×100%
KR=0,01590,34122
×100%=4,7%=3AB
4. Pelaporan fisika
μk=|μk±∆μk|μk=|0,341±0,0159|
PEMBAHASAN
Kegiatan 1: Hubungan antara gaya normal dengan gaya gesekan
Pada kegiatan pertama yaitu mencari hubungan antara
gaya normal dengan gaya gesekan. Dengan mengambil data
gaya tarik sebagai gaya gesekan pada benda dengan
memanipulasi besar gaya normal yang bergantung pada massa
balok yang terlebih dahulu telah diukur dengan
menggunakan neraca Ohauss 310 gram kemudian dikalikan
dengan percepatan gravitasi. Dengan masing-masing gaya
normal adalah balok yang ditambahkan beban yaitu
balok+beban 1, balok+beban1+beban2, dan
balok+beban1+beban2+beban3 sehingga gaya normal menjadi
variabel bebas. Dengan perubahan pada gaya normal, maka
menyebabkan perubahan pada penunjukkan neraca pegas yaitu
gaya tarik balok sehingga gaya tarik menjadi variabel
respon dari besar gaya normal. Gaya tarik balok sama
dengan gaya gesekan statik pada balok karena menggunakan
hukum Newton I pada saat balok tepat akan bergerak yaitu
∑F=0 maka F−fs=0 sehinggaF=fs. Sedangkan pada saat
balok bergerak lurus beraturan gaya tarik juga sama
dengan gaya gesekan kinetik menggunakan hukum Newton II
karena benda bergerak ∑F=ma dengan percepatan pada GLB
adalah nol makaF−fk=0 sehinggaF=fk. Kemudian variabel
yang dibuat untuk tetap dan tidak berubah adalah jenis
permukaan balok. Yang telah diatur sebelumnya untuk
menggunakan balok yang permukaannya kasar sehingga tidak
ikut berpengaruh pada hasil gaya tarikan.
Untuk gaya normal N=|1,1263±0,0001|N, pada saat bendatepat akan bergerak menunjukkan rata-rata gaya gesekan
statik sebesarfs=|0,77±0,070|N dan rata-rata gaya gesekan
kinetik sebesar fk=|0,40±0,050|N. Untuk gaya normal
N=|1,6626±0,0001|N, pada saat benda tepat akan bergerakmenunjukkan rata-rata gaya gesekan statik sebesar
fs=|0,88±0,050|N dan rata-rata gaya gesekan kinetik
sebesarfk=|0,60±0,050|N. Dan untuk gaya normal
N=|2,1699±0,0001|N, pada saat benda tepat akan bergerakmenunjukkan rata-rata gaya gesekan statik sebesar
fs=|1,2±0,070|N dan rata-rata gaya gesekan kinetik sebesar
fk=|0,80±0,050|N.
Dari data dapat dilihat bahwa penunjukkan nilai gaya
gesekan statik berturut-turut untuk gaya normal 1,1263 N,
1,6626 N, dan 2,1699 N adalah 0,77 N, 0,88 N, dan 1,2 N
yang menunjukkan bahwa semakin besar gaya normal yang
diberikan, maka semakin besar pula gaya gesekan
statiknya. Dapat dilihat bahwa untuk gaya normal 1,1263 N
menunjukkan gaya gesekan statik yang lebih kecil dari
dari gaya normal 1,6626 N, dan gaya normal 1,6626 N
menunjukkan gaya gesekan statik yang lebih kecil dari
dari gaya normal 2,1699 N. sehingga dapat disimpulkan
bahwa gaya normal berbanding lurus dengan gaya gesekan
statik.
Sedangkan untuk gaya gesekan berturut-turut untuk gaya
normal 1,1263 N, 1,6626 N, dan 2,1699 N adalah 0,40 N,
0,60 N, dan 0,80 N yang menunjukkan bahwa semakin besar
gaya normal yang diberikan, maka semakin besar pula gaya
gesekan kinetiknya. Dapat dilihat bahwa untuk gaya normal
1,1263 N menunjukkan gaya gesekan kinetik yang lebih
kecil dari dari gaya normal 1,6626 N, dan gaya normal
1,6626 N menunjukkan gaya gesekan statik yang lebih kecil
dari dari gaya normal 2,1699 N. Sehingga dapat
disimpulkan bahwa gaya normal berbanding lurus dengan
gaya gesekan kinetik.
Dari hasil tersebut, penunjukkan gaya gesekan statik
mapun kinetik memiliki karakteristik yang sama. Sehingga
dapat disimpulkan bahwa hubungan antara gaya normal
dengan gaya gesekan dilihat dari besar gaya normalnya
yang berbanding lurus yaitu, semakin besar gaya normal
maka semakin besar pula gaya gesekannya.
Kemudian dari data gaya normal dengan gaya gesekan
statik dihubungkan dengan menggunakan plot grafik
hubungan antara gaya normal dengan gaya gesekan statik
yang diperoleh saat benda tepat akan bergerak untuk
mendapatkan nilai dari kofisien gesekan statik. Nilai
kofisien gesekan statik ini diperoleh dari penurunan gaya
gesekan statik terhadap gaya normal sehingga μs=m. Dengan
m merupakan gradien (kemiringan garis grafik) yang
diambil dari persamaan y = 0,4101x + 0,2722 sehinggaμs=0,4101. Dengan menganalisis kesalahan yang diperoleh
dari derajat kepercayaan yang diambil dari nilai R2 dari
grafik yaitu R² = 0,9178 kemudian dicari kesalahan
relatif dari kofisien gesekan statik sehingga diperoleh
ketidakpastian ∆μs= 0,0004101. Dan didapatkan pelaporan
fisika dari kofisien gesekan statik yaitu
μs=|0,41±0,00041|.
Dari data gaya normal dengan gaya gesekan kinetik
dihubungkan dengan menggunakan plot grafik hubungan
antara gaya normal dengan gaya gesekan kinetik yang
diperoleh saat benda tepat akan bergerak untuk
mendapatkan nilai dari kofisien gesekan kinetik. Nilai
kofisien gesekan kinetik ini diperoleh dari penurunan
gaya gesekan kinetik terhadap gaya normal sehingga μk=m.
Dengan m merupakan gradien (kemiringan garis grafik) yang
diambil dari persamaan y = 0,3832x - 0,0334 sehinggaμk=0,3832. Dengan menganalisis kesalahan yang diperoleh
dari derajat kepercayaan yang diambil dari nilai R2 dari
grafik yaitu R² = 0,9997 kemudian dicari kesalahan
relatif dari kofisien gesekan kinetik sehingga diperoleh
ketidakpastian ∆μk=0,0003832. Dan didapatkan pelaporan
fisika dari kofisien gesekan kinetik yaitu
μk=|0,3832±0,0003832|.
Dari kedua data kofisien gaya gesekan yang diperoleh
dari grafik hubungannya dengan gaya normal, dengan
kofisien gesekan statik adalah μs=|0,41±0,00041| dan
kofisien gesekan kinetik adalah μk=|0,3832±0,0003832|.
Dapat dilihat bahwa nilai kofisien gesekan kinetik akan
selalu lebih kecil dari kofisien gesekan statik dengan
selisih 0,0268. Karena pada dasarnya akan lebih sulit
untuk memindahkan benda yang dalam keadaan diam yang
memiliki kofisien gesekan statik dibandingkan benda yang
telah bergerak dimana gaya gesekan statiknya telah
berubah menjadi kinetik.
Kegiatan 2: Hubungan antara keadaan permukaan dengan gaya gesekan
Pada kegiatan kedua yaitu mencari hubungan antara
keadaan permukaan dengan gaya gesekan. Dengan mengambil
data gaya tarik sebagai gaya gesekan pada benda dengan
memanipulasi jenis permukaan balok yaitu dengan yang
kasar, agak kasar, dan licin sehingga jenis permukaan
menjadi variable bebas. Dengan perubahan pada jenis
permukaan balok maka menyebabkan perubahan pada
penunjukkan neraca pegas yaitu gaya tarik balok sehingga
gaya tarik menjadi variabel respon dari jenis permukaan.
Gaya tarik balok sama dengan gaya gesekan statik pada
balok karena menggunakan hukum Newton I pada saat balok
tepat akan bergerak yaitu ∑F=0 maka F−fs=0 sehinggaF=fs
. Sedangkan pada saat balok bergerak lurus beraturan gaya
tarik juga sama dengan gaya gesekan kinetik menggunakan
hukum Newton II karena benda bergerak ∑F=ma dengan
percepatan pada GLB adalah nol makaF−fk=0 sehinggaF=fk.
Kemudian variabel yang dibuat untuk tetap dan tidak
berubah adalah gaya normal pada balok yang bergantung
pada massanya. Yang telah diatur sebelumnya untuk
menggunakan balok tanpa penambahan beban sehingga
memiliki gaya normal N=|0,6304±0,0001|N.Untuk jenis permukaan 1 yaitu balok kasar, pada saat
benda tepat akan bergerak, rata-rata penunjukan pada
neraca pegas adalah fs=|0,80±0,05|N dan pada saat balok
bergerak lurus beraturan adalah fk=|0,30±0,05|N. Untuk
jenis permukaan 2 yaitu balok agak kasar, pada saat benda
tepat akan bergerak, rata-rata penunjukan pada neraca
pegas adalah fs=|0,70±0,05|N dan pada saat balok bergerak
lurus beraturan adalahfk=|0,30±0,05|N. Untuk jenis
permukaan 3 yaitu balok licin, pada saat benda tepat akan
bergerak, rata-rata penunjukan pada neraca pegas adalah
fs=|0,40±0,05|N dan pada saat balok bergerak lurus
beraturan adalahfk=|0,20±0,05|N.
Dari hasil pengamatan tersebut dapat dilihat bahwa
gaya gesekan statik untuk permukaan 1, 2, dan 3 berturut-
turut 0,80; 0,70; 0,40 yang menunjukkan permukaan yang
lebih kasar memiliki gaya gesekan statik yang lebih
tinggi dari permukaan yang agak kasar dan permukaan yang
agak kasar lebih tinggi dari yang licin. Sehingga semakin
tinggi tingkat kekasaran balok maka semakin tinggi pula
gaya gesekan statiknya.
Sedangkan untuk gaya gesekan kinetik untuk permukaan
1, 2, dan 3 berturut-turut 0,30; 0,30; 0,20 yang
menunjukkan permukaan yang lebih kasar memiliki gaya
gesekan kinetik yang sama dari permukaan yang agak kasar
dan permukaan yang kasar maupun yang agak kasar lebih
tinggi dari yang licin. Sehingga semakin tinggi tingkat
kekasaran balok maka semakin tinggi pula gaya gesekan
kinetik.
Dari hasil tersebut, penunjukkan gaya gesekan statik
mapun kinetik memiliki karakteristik yang sama. Sehingga
dapat disimpulkan bahwa hubungan antara keadaan permukaan
benda dengan gaya gesekan dilihat dari tingkat
kekasarannya yang berbanding lurus yaitu, semakin kasar
permukaan benda maka semakin besar pula gaya gesekannya.
Kegiatan 3: Menentukan koefisien gesekan statik pada bidang miring
Pada ketiga yaitu menentukan kofisien gesekan statik
pada bidang miring dengan memanipulasi gaya berat yang
berhubungan dengan massa beban yaitu balok tanpa beban
W=|0,6304±0,0001|N, balok+beban1W=|1,1263±0,0001|N,
balok+beban1+beban2 W=|1,6626±0,0001|N, dan
balok+beban1+beban2+ beban3 W=|2,1699±0,0001|N. Sehinggayang menjadi variabel manipulasi/bebas dalam kegiatan ini
adalah gaya berat. Sedangkan hasil dari pengubahan gaya
berat mengakibatkan perubahan pada sudut kritis yang
dibentuk pada bidang miring pada saat benda tepat akan
bergerak. Sehingga yang menjadi variabel respon adalah
sudut kritis. Dan variabel yang diatur untuk tetap atau
tidak berubah adalah keadaan permukaan agar tidak
mempengaruhi gaya gesekan dengan pengaturan yaitu
menggunakan permukaan yang kasar.
Untuk gaya berat 0,6304 N, rata-rata penunjukkan sudut
kritisnya adalah θc=|18,0±0,500|°. Untuk gaya berat 1,1623
N, rata-rata penunjukkan sudut kritis adalah
θc=|17,3±0,700|°. Untuk gaya berat 1,6626 N, rata-rata
penunjukkan sudut kritis adalah θc=|16,7±0,300|°. Untuk
gaya berat 2,1699 N, rata-rata penunjukkan sudut kritis
adalah θ=|16,0±0,500|°. Dari data diperoleh semakin besargaya berat maka semakin kecil sudut kritisnya. Sehingga
gaya berat berbanding terbalik dengan sudut kritis.
Dari data gaya berat dan sudut kritis kemudian
ditentukan kofisien gesekan statik serta analisis
ketidakpastiannya dengan menggunakan rumus μs=tanθ dan
∆μs=| ∆θcosθsinθ|μs tiap perubahan gaya berat. Sehingga untuk
gaya berat 0,6304 N, kofisien gesekan statiknya adalah
μs=|0,320±0,00944|. Untuk gaya berat 1,1623 N, kofisien
gesekan statiknya adalah μs=|0,310±0,0310|. Untuk gaya
berat 1,6626 N, kofisien gesekan statiknya adalah
μs=|0,300±0,00588|.Untuk gaya berat 2,1699 N, kofisien
gesekan statiknya adalah μs=|0,290±0,00939|. Dari data
diperoleh bahwa semakin besar gaya berat dengan sudut
kritis yang semakin kecil maka mengakibatkan semakin
kecil kofisien gaya gesekan statiknya. Sehingga diperoleh
kofisien gaya gesekan statik berbanding lurus dengan
sudut kritis dan berbanding terbalik dengan gaya
beratnya. Dari perbandingan gaya berat dengan kofisien
gesekan tersebut, diperoleh juga bahwa semakin besar gaya
berat mengakibatkan semakin kecilnya kofisisen gesekan
statiknya sehingga diperoleh hubungan bahwa massa yang
mengakibatkan gaya berat berbanding terbalik dengan
kofisien gesekan statik.
Kegiatan 4: Menentukan koefisien gesekan kinetik pada bidang miring
Pada kegiatan empat yaitu menentukan kofisien gesekan
kinetik pada bidang miring dengan memanipulasi jarak
tempuh dari bidang miring ke ujung bawah bidang miring
yaitu untuk pengamatan 1, 2, dan 3 berturut-turut 100 cm,
70 cm, dan 50 cm. sehingga jarak tempuh merupakan
variabel bebas/manipulasi. Sedangkan variabel yang ikut
terpengaruhi atau berubah dari pengubahan jarak tempuh
adalah waktu tempuh balok sehingga variabel respon pada
kegiatan ini adalah waktu tempuh. Sedangkan variabel
kontrol yang dijaga untuk tidak berubah atau tetap adalah
massa balok yaitu massa balok tanpa penambahan beban
yaitu m=|0,06304±0,00001|kg dan besar sudut kemiringan
bidang yaitu sudut yang lebih besar 2 derajat dari sudut
kritis dari balok tanpa beban yaitu 18˚ menjadi
θ=|20,0±0,5|°.Untuk jarak tempuh 1 m rata-rata waktu tempuh adalah
t=|1,7±0,10|s, untuk jarak tempuh 0,7 m rata-rata waktu
tempuh adalah t=|1,2±0,070|s dan untuk jarak tempuh 0,5 m
rata-rata waktu tempuh adalah t=|1,1±0,070|s. sehinggadari data dapat disimpulkan bahwa semakin besar jarak
tempuh, maka semakin besar pula waktu tempuhnya sehingga
jarak tempuh berbanding lurus dengan waktu tempuh.
Dari pengambilan data, kemudian diolah untuk membuat
grafik antara jarak tempuh dengan kuadrat waktu tempuh
dengan jarak tempuh 1 m dengan t2=|2,8900−0,1000|, jarak
tempuh 0,7 m dengan t2=|1,5129−0,1000|, dan jarak tempuh
0,5 m dengan t2=|1,1449−0,1000|. Dari grafik ditentukanbesar percepatan dengan menggunakan penurunan jarak
terhadap kuadrat waktu yaitu dxdt2=∂mt2−c∂t2 dengan hasil m=a
yang merupakan gradien (kemiringan garis) pada plot
grafik. Kemudian dicari ketidakpastiannya dengan
menggunakan derajat kepastian sehingga diperoleh
percepatan a=|0,268±0,0114|m /s2.
Kemudian dari besar percepatan, kemudian ditentukan
nilai kofisien gesekan kinetik pada balok dengan
menggunakan rumus hubungan antara percepatan dengan
kofisien gesekan kinetik yaitu ax=g (sinθ−μkcosθ ) sehingga
μk=tanθ−ax
gcosθ beserta analisis ketidakpastiannya yang
terlebih dahulu menggunakan konfersi satuan derajat yaitu
200 ke radian sehingga diperoleh μk=|0,341±0,0159|.
SIMPULAN DAN DISKUSI
A. Simpulan
Berdasarkan hasil analisis data, Gaya gesekan
berbanding lurus dengan gaya normalnya, gaya berat,
dan tingkat kekasaran permukaan. Semakin besar gaya
normal, gaya berat, dan kasarnya permukaan maka
semakin besar pula gaya gesekan. Dari sini
didapatkan pula bahwa kofisien gaya gesekan statik
dan kinetik berbanding lurus dengan sudut kritis dan
berbanding terbalik dengan gaya beratnya sehingga
diperoleh hubungan bahwa massa yang mengakibatkan
gaya berat, dan gaya normal, dan berbanding lurus
dengan gaya gesekan dan berbanding terbalik dengan
kofisien gesekan dan sudut kemiringan bidang.
Dapat diketahui bahwa koefisien gesekan baik
statik maupun kinetik berbanding lurus dengan gaya
gesekannya dan berbanding terbalik dengan gaya
normal dan gaya beratnya. Pada kegiatan pertama
diperoleh kofisien gesekan statik adalah
μs=|0,41±0,00041| dan kofisien gesekan kinetik adalah
μk=|0,3832±0,0003832|. Dapat dilihat bahwa nilai
kofisien gesekan kinetik akan selalu lebih kecil
dari kofisien gesekan statik dengan selisih 0,0268.
Karena pada dasarnya akan lebih sulit untuk
memindahkan benda yang dalam keadaan diam yang
memiliki kofisien gesekan statik dibandingkan benda
yang telah bergerak dimana gaya gesekan statiknya
telah berubah menjadi kinetik. Hal tersebut
menunjukkan bahwa nilai koefisien gesekan statik
selalu lebih besar dibandingkan koefisien gesekan
kinetiknya (μs>μk ¿. Dari hasil tersebut dapat
dikatakan bahwa tujuan dari percobaan ini telah
tercapai.
Simpulan berdasarkan rumusan masalah yang diajukan
adalah,
1. Faktor-faktor yang mempengaruhi gaya gesekan
adalah
a. Gaya normal (N)
Gaya normal timbul jika suatu benda
bersentuhan dengan permukaan suatu bidang.
Sehingga gaya normal adalah gaya reaksi dari
bidang akibat gaya aksi dari benda yang
arahnya tegak lurus terhadap bidang. Makin
besar gaya normlanya, maka makin besar pula
gaya gesekannya. Gaya normal ada karena reaksi
terhadap gaya berat benda (aksi) yang
diakibatkan oleh adanya massa benda yang
memperhitungkan besar percepatan gravitasi
tempat benda tersebut itu berada dari
permukaan bumi. Sehingga gaya normal N = m.g
dimana m adalah massa, dan g adalah percepatan
gravitasi.
b. Kofisien gesekan (μ)
Kofisien gesekan adalah tingkat kekasaran
permukaan yang bergesekan. Makin kasar kontak
bidang permukaan yang bergesekan, maka makin
besar pula gaya gesekan yang ditimbulkan.
Nilai kofisien gesekan dari yang paling halus
ke kasar adalah 0-1 yang tidak berkonstanta.
2. Konsep gaya gesekan statik dan kinetik adalah
ditinjau dari keadaan antara kedua permukaan
bendanya. Gaya gesekan antara dua permukaan yang
saling diam satu terhadap yang lain disebut gaya
gesekan statik. Gaya gesekan statik yang maksimum
sama dengan gaya terkecil yang dibutuhkan agar
benda mulai bergerak. Sekali gerak telah dimulai,
gaya gesekan antar kedua permukaan biasanya
berkurang sehingga diperlukan gaya yang lebih
kecil untuk menjaga agar benda bergerak
beraturan. Gaya yang bekerja antara dua permukaan
yang saling bergerak relatif disebut gaya gesekan
kinetik.
3. Pada bidang datar, kofisien gesekan statik
diperoleh dengan persamaan μs=fs
N dan kofisisen
gesekan konetik diperoleh dengan persamaan μk=fk
N . Sedangkan pada bidang miring untuk kofisien
gesekan statik diperoleh dari penerapan hukum
Newton I untuk benda yang diam ∑F=0, makaWsinθ−fs=0 dimana N=Wcosθ sehingga
Wsinθ=Wcosθ.μs dan dari persamaan tersebut
diperoleh μs=WsinθWcosθ
=tanθ sehingga S = tan c dimana
θ merupakan sudut kritis pada saat benda tepatakan bergerak. Untuk kofisien gesekan kinetik
diperoleh dari persamaan percepatannya yaitu
ax=g (sinθ−μkcosθ ) sehingga μk=tanθ−ax
gcosθ4. Berdasarkan hasil pengamatan yang dilakukan
diperoleh hubungan antara gaya gesekan dengan
gaya normal, kofisien gaya gesekan, keadaan
permukaan benda, dan besarnya sudut kemiringan
bidang. Gaya gesekan berbanding lurus dengan gaya
normalnya, gaya berat, dan tingkat kekasaran
permukaan. Semakin besar gaya normal, gaya berat,
dan kasarnya permukaan maka semakin besar pula
gaya gesekan. Dari sini didapatkan pula bahwa
kofisien gaya gesekan statik dan kinetik
berbanding lurus dengan sudut kritis dan
berbanding terbalik dengan gaya beratnya. Dari
perbandingan gaya berat dengan kofisien gesekan
tersebut, diperoleh juga bahwa semakin besar gaya
berat mengakibatkan semakin kecilnya kofisien
gesekan statik dan besar kemiringan sudut
sehingga diperoleh hubungan bahwa massa yang
mengakibatkan gaya berat, dan gaya normal, dan
berbanding terbalik dengan kofisien gesekan dan
sudut kemiringan bidang..
B. Diskusi
Diskusi yang kami lakukan berupa saran untuk
asisten, dosen, dan laboratorium ,
1. Saran bagi asisten
Kepada asisten kami menyarankan agar lebih
memperhatikan keadaan praktikan. Asisten
hendaknya memberikan pengarahan yang lebih jelas
tentang analisis data sehingga praktikan dapat
lebih mudah melaporkan hasil pengamatan.
2. Saran bagi dosen
Kepada dosen hendaknya membimbing lebih baik
kepada para asisten akan bagaimana cara
membimbing praktikannya dalam melakukan suatu
praktikum sesuai dengan aturan-aturan yang ada.
3. Saran bagi laboratorium
Kepada laboratorium maupun petugas yang
menyediakan alat dan bahan dalam praktikum
hendaknya mengawasi dan memperhatikan alat-alat
ukur atau kelengkapan yang ada di dalam
laboratorium karena masih banyak dari alat
tersebut yang sudah rusak yaitu memiliki
kesalahan bersistem bahkan tak dapat/layak untuk
digunakan lagi.
DAFTAR RUJUKAN
Halliday, David dan Resnick, Robert. 1999. Fisika Jilid 1Edisi ketiga (terjemahan). Jakarta: Erlangga
Herman dan asisten. 2014. PENUNTUN PRAKTIKUM FISIKA DASAR 1.Makassar: Unit Laboratorium Fisika Dasar
Serway, Raymond A. dan Jewett, Jr. John W. 2009. FISIKAuntuk Sains dan Teknik. Jakarta: Salemba Teknika
Supiyanto. 2007. FISIKA SMA Jilid 1 untuk SMA Kelas X. Jakarta:Erlangga
Related Documents











