~-n _1~7 MAYO 1995 ÍIBLIO'l'Bljj Este libro debe ser devuelto, a naás tardar en la última fecha sellada. Su retención más allá de la fecha de vencimiento, lo hace acreedor a las multas que fija el reglamento. FECHA DEVOLUCION 222.-i3

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

~-n _1~7 MAYO 1995 ÍIBLIO'l'Bljj
Este libro debe ser devuelto, a naás tardar en la última fecha sellada. Su retención más allá de la fecha de vencimiento, lo hace acreedor a las multas que fija el reglamento.
FECHA DEVOLUCION
222.-i3

INSTITUTO TECNOLOGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY
CAMPUS ESTADO DE MEXICO
DIVISION DE GRADUADOS E INVESTIGACION DIRECCION DE MAESTRIAS EN INGENIERIA
BIBLIOTEIM
~ . 11 .l!ó .• -1i ~ M E X I b u,"$) 'l;;;i;,···. \.\~
~---· LA RAZON DE UTILIZAR MOTORES ELECTRI DE
ACOPLAMIENTO DIRECTO EN ROBOTS
INDUSTRIALES
TESIS QUE PARA OPTAR EL GRADO DE
MAESTRO EN SISTEMAS DE
MANUFACTURA PRESENTA
GEIIIAIIDO LEON DE LA LUZ
ASESOR: DR. LUIS PEDRO GRASA
COMITE DE TESIS: M. EN C. JUAN CARLOS PEDROZA
• DII. AWANDRO VEGA SAUNAI
JURADO: DR. LUIS PEDRO GRASA
DR. ALEJANDRO VEGA
M. EN C. JUAN CARLOS PEDROZA
DR. EMIL LIEIIERMANN
ATIZAPAN DE ZARAGOZA. MEXICO, MAYO DE 1995

LA RAZÓN DE UTILIZAR MOTORES ELÉCTRICOS DE ACOPLAMIENTO DIRECTO EN ROBOTS INDUSTRIALES . . . . . , , . .... .

AGRADECIMIENTO:
A MI HIJO, MI ESPOSA Y MADRE.

INDICE
CAPITULO I TECNOLOGIAS DE ROBOTS
1.1 ¿ QUE ES UN ROBOT 7 1.2 ¿DEQUE PARTES ESTA CONFORMADO UN ROBOT 7
1.2.1 MANIPULADOR 1.2.2 FUENTE DE PODER 1.2.3 CONTROLADOR
1.3 CLASIFICACION DE LOS ROBOTS
1.3.1 POR SU ESPACIO DE TRABAJO 1.3.2 POR EL CONTROL DE SU MOVIMIENTO 1.3.3 POR EL CONTROL DE SU FUENTE DE POTENCIA
1.4 SISTEMAS INDUSTRIALES I.S ESTRUCTURAS PARALELAS 1.6 ARQUITECTURA MODULAR PARA ESTRUCTURAS DE ROBOTS
(1) (1)
(1) (2) (4) (6)
(6) (9)
(10) . (11) (12) (14)
CAPITULO II LA PROPUESTA DE MOTORES ELÉCTRICOS DE ACOPLAMIENTO DIRECTO
2.1 PERSPECTIVA HISTÓRICA DEL DISEÑO DE ROBOTS 2.2 EL SURGIMIENTO DE LA TRANSMISION DE ACOPLAMIENTO DIRECTO 2.3 HISTÓRIA DE LOS ROBOTS DE ACOPLAMIENTO DIRECTO
CAPITULO 111 SISTEMAS DE TRANSMISIÓN
3.1 INTRODUCCIÓN 3.2 MOTORES DE TORQUE DE CORRIENTE DIRECTA
,.2.1 DISEÑO 3.2.2 LA CONSTANTE DE TORQUE 3.2.3 LA CONSTANTE DEL MOTOR 3.2.4 LA CONSTANTE DE TIEMPO ELÉCTRICA
3.3 MOTORES DE TORQUE DE CD SIN ESCOBil.LAS 3.3.1 PRINCIPIO 3.3.2 MOTORES COMERCIALIZADOS
3.4 MOTORES DE RELUCTANCIA VARIABLE 3.4.1 PRINCIPIO 3.4.2 MOTORES COMERCIALES
3.5 CARACTERÍSTICAS EN EL DISEÑO Y CONTROL DEL BRAZO 3.5.1 CAPACIDAD DE CARGA VS PESO DEL BRAZO 3.5.2 RIGIDEZ DEL SISTEMA SERVO 3.5.3 EFECTOS DE LA INDUCTANCIA DEL MOTOR
(18) (20) (22)
(33) (33) (33) (35) (36) (39) (39) (39) (43) (46) (46) (49) (52) (52) (52) (53)

3.S.4 EFECTOS DINÁMICOS EN m.. BRAZO 3.S.S SOBRECALENTAMIENTO 3.S.6 CARACTERÍSTICAS DE AMORTIGUAMIENTO
CAPITULO IV ESTÁTICA
4.1 INTRODUCCIÓN 4.2 ÁNALISIS DE EFICIENCIA DE POTENCIA 4.3 DISEÑO DE UNA ESTRUCTURA CINÉMATICA
4.3.1 MECANISMO DE TRANSMISIÓN PARALELO 4.3.2 IDENTIFICACIÓN DE LA CONSTANTE DEL MOTOR 4.3.3 EVALUACIÓN DE LA ESTRUCTURA CINÉMATICA
4.4 CONCLUSIONES CONCLUSIONES GENERALES BIBLIOGRAFÍA
(S4) (SS) (SS)
(S7) (S7) (60) (60) (63) (63) (71) (7S) (78)

LISTA DE FIGURAS
FIGURA 1-la ESTRUCTIJRA DE UN ROBOT SCARA (7) FIGURA l·lb ESTRUCTIJRA DE UN ROBOT Cil.iNDRICO (7) FIGURA 1-lc ESTRUCTIJRA DE UN ROBOT ESFÉRICO (7) FIGURA 1-ld ESTRUCTIJRA DE UN ROBOT REVOLUTA (7) FIGURA 1·2a ROBOT CINCINNATI MILACRON ELECTRIC (13) FIGURA 1·2b ROBOT GANI'RY (13) FIGURA 1·3a ROBOT MÓOULAR SKINNER (15) FIGURA 1·3b ROBOT DE ESTRUCTIJRA PARALELA DE STEWART (15) FIGURA 2-1 CONSTRUCCIÓN BÁSICA DE UNA UNIÓN DE ACOPLAMIENTO DIRECTO (21) FIGURA 3-1 CARAC1'ERÍSTICAS DE TORQUE VELOCIDAD Y POTENCIA VS VELOCIDAD (38) FIGURA 3-2 CONSTRUCCIÓN CONVENCIONAL DE MOTOR CD CON Y SIN ESCOBILLAS (41) FIGURA 3.3 SISTEMA DE CONTROL PARA UN MOTOR CD SIN ESCOBil.LAS (42) FIGURA 3-4 FUERZAS PRODUCIDAS EN MOTORES DE RELUCTANCIA VARIABLE (47) FIGURA 3-5 PRINCIPIO DEL MOTOR A PASOS DE RELUCTANCIA VARIABLE (48) FIGURA 3-6 CONSTRUCCIÓN DEL MOTOR MEGATORQUE (51) FIGURA 4·1 MANIPULADORDE UN ROBOT (58) FIGURA 4-2 ELIPSE DE FUERZAS (61) FIGURA 4-3 MECANISMO DE BRAZO DE TRANSMISIÓN SERIAL DE 2 GRADOS DE LIB. (62) FIGURA 4-4 MECANISMO GENERAL DE ARTICULACIONES TIPO BARRAS (64) FIGURA 4-5 CONSTANTE DEL MOTOR (65) FIGURA 4-6 MECANISMO DE TRANSMISIÓN PARALELO DE 2 GRADOS DE LIBERTAD (66) FIGURA 4-7 CARACI'ERÍSTICAS DE LA FUERZA ESTÁTICA (69) FIGURA 4-8 RELACIÓN DE LA DISIPACIÓN DE LA POTENCIA PARA TRANSMISIONES (70) FIGURA 4-9 CARACI'ERÍSTICAS DE LA FUERZA ESTÁTICA PARA CONFIG. CRUZADAS (72)
LISTA DE TABLAS
TABLA 3-1 ESPECIFICACIONES DE UN MOTOR CD SIN ESCOBILLAS TABLA 3-2 ESPECIFICACIONES DEL MOTOR MEGATORQUE
(45) (49)

LISTA DE FOTOS
FOTO 2-1 BRAZO DE ACOPLAMIENTO DIRECTO MODELO 1 DE LA UCM (23) FOTO 2-2 BRAZO DE ACOPLAMIENTO DIRECTO MODELO 1 DEL l1M (2S) FOTO 2-3 ROBOT DE ACOPLAMIENTO DIRECTO MODELO O DEL l1M (26) FOTO 2-4 ROBOT DE ACOPLAMIENTO DIRECTO MODELO IV DEL l1M (27) FOTO 2-S ROBOT DE ACOPLAMIENTO DIRECTO AdeptOoc DE ADEPT TECHNOLOGY (29) FOTO 2-6 ROBOT DE ACOPLAMIENTO DIRECTO PARA AL TA VELOCIDAD DE (30)
INDUSTRIAL ELÉCTRICA MATSUSIDTA FOT02-7 ROBOT DE ACOPLAMIENTO DIRECTO PARA ALTA VELOCIDAD PARA (32)
APLICACIONES DE CORTE PORRA YO LASER DE INDUSTRIAS SIDN MEIWA. FOTO 3-1 MOTOR DE TORQUE DE CD (34) FOTO 3-2 MOTORES DE TORQUE DE CD SIN ESCOBilLAS (44) FOTO 3-3 MOTOR MEGATORQUE DE MOTORNETICS (SO) FOTO 4-1 ROBOT DE ACOPLAMIENTO DIRECTO DEL l1M MODELO IV EN MODO DE (73)
TRANSMISIÓN PARALELO. FOTO 4-2 ROBOT DE ACOPLAMIENTO DIRECTO DEL l1M MODELO IV EN MODO DE (74)
TRANSMISIÓN CRUZADA.

PREFACIO
El objetivo de este trabajo es presentar no solo fundamentos teóricos necesarios para el análisis, sino también implementaciones prácticas de tecnologías de transmisiones de acoplamiento directo en robots industriales.
El exponer la tecnología actual que se utiliza para el desarrollo de motores de acoplamiento directo aplicado a robots industriales. Dar al disei'lador de un robot una propuesta clara de los siguientes puntos:
• En que tipos de uniones de articulaciones de robots más comunes es factible instalar motores de acoplamiento directo.
• Porque seleccionar un actuador electromagnético de acoplamiento directo para su manipulador.
• Que factores claves se deben de tomar en cuenta para poder utilizar un actuador eléctrico en -el disei'lo de un brazo robotizado.
La información se organizará en cuatro partes: introducción y clasificación de los robots, perspectiva histórica de los motores de acoplamiento directo y el disei'lo de un brazo robotizado y por ultimo los factores que se deben de tomar en cuenta para poder utilizar un actuador eléctrico de acoplamiento directo.
Capitulo 1 de este escrito inicia con una introducción de lo que son los robots y sus clasificaciones así como sistemas industriales, estructuras paralelas y arquitectura modular para estructuras de robots.
Capitulo 2 trata sobre una perspectiva histórica en el diseno de robots y también presenta el concepto de acoplamiento directo. Describe una variedad de robots que utilizan en su transmisión motores de acoplamiento directo. Esto incluye unos modelos que fueron disei'lados por el Instituto Tecnológico de Massachusetts y también por el Laboratorio de Manufactura de la Universidad de Camegie Mellen, también se incluyen de algunas compai'lías industriales que han producido productos que utilizan este concepto.
Capitulo 3 habla sobre sistemas de transmisión de acoplamiento directo. Los componentes de un robot tales como motores, amplificadores de transmisión, sensores y articulaciones.
Capitulo 4 nos muestra una herramienta analítica para la evaluación de características estáticas de manipuladores.

CAPITULO I
TECNOLOGfA DE ROBOTS
1.1 ¿QUE ES UN ROBOT?
Un robot es un manipulador multifuncional reprogramable, disenado para mover materiales, partes, herramientas o dispositivos especializados por medio de movimientos programados variables para desarrollar un sin número de tareas.
Esto quiere decir que un robot puede ser ensenado para hacer más de un trabajo por medio del cambio de información almacenada en su memoria. El robot es capaz de mover materiales (como materiales se entiende cualquiera que sea usado en la manufactura de un producto), también puede manipular partes que ya han sido manufacturadas, además del manejo de materiales y partes, al robot también pueden adaptársela herramientas para desarrollar un trabajo determinado.
1.2 ¿DE QUE PARTES ESTA CONFORMADO UN ROBOT?
Las 9artes principales de un robot son el manipulador, la fuente de potencia y el controlador. El manipulador es usado para tomar materiales, partes y/o herramientas especiales usadas en la manufactura. La fuente de potencia proporciona la fuerza necesaria para mover el manipulador. El controlador administra a la fuente de potencia de manera que el manipulador pueda ser ensenado para poder realizar una o varías tareas.
1.2.1 MANIPULADOR
Es la unidad mecánica que desempena la función de movimiento en el robot, consiste de una serie de articulaciones y uniones capaces de producir un movimiento controlado en una o varías direcciones. Las articulaciones pueden ser del tipo de revoluta o prismáticos, dependiendo del tipo de movimiento causado por el actuador de la unión. Cuando el actuador de una unión produce un movimiento rotacional, la articulación es llamada de revoluta. Cuando el actuador produce un movimiento traslacional, la articulación es llamada prismática. El manipulador esta compuesto del brazo, muneca y el efector. Para orientar cualquier objeto en cualquier forma y en cualquier punto en el espacio se requieren de seis grados de

libertad. Los varios movimientos que el manipulador de un robot puede hacer esta definido por sus grados de libertad o ejes.
Brazo.- El papel esencial del brazo, es el de mover un efector hacia una orientación dada en un conjunto dado de puntos. El brazo es usualmente diseñado para moverse dentro de un espacio de trabajo determinado y poder mover un objeto con un peso determinado y una velocidad determinada. El diseño del brazo y el tipo de fuente de poder determina las características de potencia y velocidad del brazo. El espacio de trabajo es el espacio operacional del robot, esto es el conjunto de todos los puntos que pueden ser alcanzados por el efector. La vista desde la cima del robot, es llamada la vista de plano. La vista desde un lado del robot, es llamada la vista de elevación, combinando estás dos vistas se obtiene el área de acción que el extremo del brazo o sea el efector puede alcanzar. En el brazo se encuentran los tres primeros grados de libertad o ejes mayores. Estos tres grados de libertad son los traslacionales (derecha, izquierda, adelante, atrás, arriba y abajo) necesarios para alcanzar cualquier punto.
Mufteca.- Al final del brazo se encuentra la muñeca, la función de la muñeca es la de orientar al efector apropiadamente. La muf'leca consiste de un número de componentes que le permiten ser orientada en una variedad de posiciones. En la muñeca se encuentran los tres restantes grados de libertad o ejes menores, estos tres grados de libertad son los rotacionales (balanceo, cabeceo y giro) necesarios para obtener cualquier orientación.
Efector.· Este es el verdadero valor final del robot. En la robótica el termino efector representa la herramienta especializada que permite al robot de propósito general el desempeñar una aplicación en particular. Esta herramienta especializada debe de ser usualmente diseñada específicamente para esa aplicación en particular. Los efectores pueden ser divididos en dos categorías, herramientas y tenazas. Las tenazas son utilizadas para tomar un objeto y sostenerlo durante el ciclo de trabajo del robot. Hay otros métodos para sostener un objeto aparte de los medios mecánicos de tomar y sostener por medio de uso de dedos. Las herramientas se usan en aplicaciones donde el robot es requerido para desempeñar alguna operación en el objeto.
1.2.2 FUENTE DE PODER
El manipulador de un robot debe de ser provisto con una fuente de potencia, dicha fuente es la que mueve al manipulador a través de sus movimientos programados. En los robots industriales comerciales disponibles se cuenta con tres diferentes fuentes de potencia: hidráulica, neumática y eléctrica.
2

Hldriullco.- Este tipo de fuente de potencia generalmente es asociado con los robots de gran tamano. Un sistema hidráulico esta constituido por un motor eléctrico que bombea un fluido dentro de un sistema formado por un tanque de reserva, válvulas de control y actuadores. El tanque de reserva puede proporcionar un fluido a una alta presión y volumen que no pueden ser obtenidos sobre una base instantánea, desde un motor eléctrico. Por lo tanto el sistema hidráulico puede hacer uso de la potencia de reserva cuando esta es necesitada y restaurarla a la reserva cuando los niveles de potencia utilizados son los más bajos. Estos sistemas pueden ser disenados para actuar sobre uniones rotacionales o uniones lineales. Los actuadores de paletas rotativas pueden ser utilizados para proporcionar movimientos rotativos y los pistones hidráulicos para proporcionar movimiento lineal.
Ventajas:
1. Precisión en el control y manipulación de grandes cargas 2. Proporciona al robot gran velocidad y fortaleza 3. no produce ni arco o chispa eléctrica (ideal para un ambiente volátil o explosivo)
Desventajas:
1. Es costoso y el sistema es complejo 2. Se produce en el sistema muchas fugas y goteras 3. Utiliza bastante área de trabajo 4. El mantenimiento es costoso 5. Se requiere de un tiempo de calentamiento antes de entrar en operación ( de lo
contrario no se garantiza una buena operación)
Neum6tlco.- Este tipo de fuente de potencia esta generalmente reservado para robots pequenos de pocos grados de libertad, robots los cuales no tienen un control servo que dependen de topes o interruptores para determinar su posición, también deben de ser robots de operaciones simples y con ciclos rápidos. Los sistemas neumáticos utilizan el aire comprimido para proporcionar la potencia al robot, se pueden obtener con este sistema movimientos traslacionales de uniones deslizantes y movimientos rotatorios de uniones rotacionales.
Ventajas:
1. Simplicidad de instalación 2. No produce arco ni chispa eléctrica
Desventajas:
1. Dificultad para proporcionar un control preciso del posicionamiento, debido a la compresibilidad del aire.
3

2. Dificultad para mantener limpio y seco el aire del sistema (para un control preciso del robot)
3. Si la carga manejada por el robot se incrementa el manipulador tiende a pandearse.
Eléctrico.- Los robots que utilizan esta fuente de potencia hacen uso de motores eléctricos, que pueden ser de corriente alterna (CA), de corriente directa (CD) o motores a pasos. Estos motores son adecuados para la activación de uniones rotacionales a través de sistemas apropiados de reductores de velocidad o a través de motores de acoplamiento directo que es nuestro caso de estudio. También se pueden usar para activar uniones lineales por medio de mecanismos traslacionales. Los servo motores eléctricos son limpios, silenciosos y simples.
Ventajas:
1. Precisión y repetibilidad (ideal para trabajos precisos) 2. Requiere menor espacio de piso dentro de la planta manufacturera por ser
pequenos 3. Simplicidad de diseno y mantenimiento 4. No requieren instalaciones especiales 5. No requieren de tiempo de calentamiento
Desventajas:
1. Velocidad y potencia 2. Capacidad de carga (con el desarrollo de un nuevo diseno de motores esta
desventaja tiende a desaparecer
1.2.3 CONTROLADOR
El controlador es la parte de la máquina que controla los movimientos del robot así como la comunicación del sistema robótica con factores externos, frecuentemente estos factores son otros equipos trabajan en conjunto con el robot para formar una celda de manufactura integrada. Hay cinco tipos básicos de controles robóticas en uso actualmente: controlador de tambor, controlador lógico de aire, controlador programable, controlador con microprocesador y la minicomputadora.
Controlador de tambor.- Es el controlador más antiguo usado en la robótica, es simple y confiable, la desventaja de este controlador es su limitada versatilidad. El controlador de tambor es usado para programar los movimientos de un robot de secuencia limitada, no pueden ser usados para los robots de movimiento punto a punto, trayectoria continua o trayectoria controlada. Este controlador tiene un tambor con cientos de perforaciones dentro de las perforaciones se

insertan levas a medida que el tambor gira las pequenas levas cierran o abren ciertos interruptores, estos interruptores controlan válvulas hidráulicas o neumáticas abriéndolas o cerrándolas. Después que un movimiento es completado el tambor avanza un paso otra leva cierra o abre otro interruptor y el manipulador se mueve otra vez.
Controlador lógico de aire.- El controlador lógico de aire es usado en los robots neumáticos simples de secuencia limitada. Un controlador lógico de aire esta hecho de válvulas neumáticas y temporizadores. Las válvulas y los temporizadores están conectados y mediante la combinación de ellas se controla el abrir o cerrar las válvulas principales en el manipulador.
Controlador programable.- Es una versión electrónica del controlador de tambor y del controlador lógico de aire, la memoria del controlador programable es almacenada electrónicamente en lugar de leva.s o líneas de aire. El controlador programable es también usado con robots simples de secuencia limitada. La mayoría de los controladores programables son programados a través de teclados, el orden en que los interruptores van a ser cerrados o abiertos es definido a través del teclado, también tienen una pantalla para desplegar el programa que ha sido almacenado en su memoria. Los controladores programables son usados en muchas otras funciones de la planta automatizada.
Control por microprocesador.- Es el más común de todos los controles, puede ser usado con robots de secuencia limitada, robots punto a punto, robots de trayectoria continua y robots de trayectoria controlada. El microprocesador de control es un diseno computacional especializado específicamente para controlar el robot. Este microprocesador tiene memoria para mantener el programa del robot, circuitos especiales para interpretar las instrucciones contenidas en la memoria del robot y circuitos electrónicos para energizar las válvulas o motores que trasmiten el movimiento al manipulador.
Minicomputadora.· Actualmente los fabricantes de robots han estado adaptando mini y microcomputadores para el control de sus robots. La .salida de la pequena computadora es-alimentada dentro de un control electrónico especializado para controlar el manipuJador. La información de salida del robot puede ser reprocesada por medio de electrónica adicional, amplificada y usada para abrir y cerrar válvulas o interruptores en el manipulador.

1.3 CLASIFICACIÓN DE LOS ROBOTS
En general se puede hablar de una clasificación de los robots de acuerdo a una serie de características propias del espacio de trabajo en que se mueven y por el tipo de control del movimiento que desarrollan y por el tipo de control de su fuente de potencia.
1.3.1 POR SU ESPACIO DE TRABAJO
Los robots pueden ser clasificados de acuerdo a su espacio de trabajo dentro de cinco tipos que a continuación se en listan. Las aplicaciones diversas pueden requerir espacios de trabajo diferentes.
Rectangular.- La estructura principal de un robot rectangular consiste de tres ejes lineales ortogonales, tiene un eje vertical donde el brazo del robot se eleva y desciende, también tiene un eje horizontal donde el brazo del robot entra y sale. El robot rectangular se desliza hacia adelante y hacia atrás sobre su base, estos movimientos pueden ser referidos como viaje, alcance y elevación con los cuales obtiene un movimiento total en X, Y y Z. Combinando la vista del plano y la vista de elevación se puede ver que el espacio de trabajo forma una caja o un prisma rectangular. En este tipo de robots el hardware y el programa de control son similares a los de la máquina CNC. La mu~eca del robot puede ser programada para describir un patrón lineal por medio del direccionamiento a velocidad constante de cada uno de los ejes participantes. El robot tipo rectangular no es popular en la industria debido a su poca flexibilidad mecánica y que necesita una área de trabajo grande, no puede alcanzar objetos a nivel del piso o alcanzar puntos invisibles desde su base, además la velocidad de operación en el plano horizontal es usualmente lenta en relación con la asociada con los robots de base giratoria. Debido a sus características mecánicas de su configuración es una opción común donde se requiere alta precisión, su estructura rígida proporciona una posición precisa del efector.
Cllfndrico.- La estructura principal de un robot cilíndrico fig. 1-1b consiste de un brazo horizontal montado en una columna vertical la cual a su vez esta montada en una base rotatoria, esto se ve reflejado en lo siguiente: tiene un eje vertical con el que el brazo puede elevarse y descender, un eje horizontal con el que el brazo puede salir y entrar y por ultimo puede girar sobre su base. Estos movimientos pueden ser referidos como alcance, rotación de la base y elevación. Combinando el plano de elevación y el plano de vista se ve que el espacio de trabajo del robot cilíndrico forma un cilindro o una porción del mismo. Los robots con esta configuración ofrecen la ventaja de una mayor velocidad en la parte final del brazo debido a su eje rotatorio, sin embargo esta velocidad esta limitadá debido al
6

LJllk'
l'ig. 1-1• Vlli6n tipo 8CAM fig. 1-lb 1llli.6G tipo CiliDdri.aa
1'19. 1-14 Vlli6n Upo 1199olata
.. ,at ___ .....
7

momento variante de inercia del brazo del robot el cual depende de la carga en el efector y la posición del brazo. Un desemper'lo dinámico es usualmente difícil de alcanzar en este tipo de robots que tienen base rotatoria. El torque del motor de la base, depende de la posición, velocidad y aceleración de las otras uniones y esto causa variación en el torque reflejado y en el momento de inercia. El momento de inercia reflejado en la base depende no solamente del peso del objeto que esta siendo manejado sino también de la distancia entre el eje de la base y el objeto manipulado, como resultado el momento efectivo de inercia en el direccionador de la base varía con el tiempo y la posición, esto trae como consecuencia un resultado inferior del desemper'lo dinámico del brazo. Un robot de este tipo puede tener dificultades para tocar el piso cercano a la base. Los robots cilíndricos son usualmente utilizados cuando una tarea requiere alcances dentro de pequer'las aberturas.
Esférico.· La configuración cinemática de este tipo de robot fig. 1-1c es muy similar a la torreta de un tanque. El robot esférico pivotes sobre su base formando un arco y no se eleva ni desciende sobre un mismo eje vertical sino que también pivotes. estos movimientos pueden ser referidos como alcance, rotación de la base y ángulos de elevación. Combinando el plano de elevación y el plano de vista se ve que el espacio de trabajo forma una esfera o pelota. Sus desventajas comparadas con los robots rectangulares son sus dos ejes con una resolución relativamente baja que varía con la longitud del brazo. Su principal ventaja es su flexibilidad mecánica, el eje de pivoteo en el plano vertical permite acceso a puntos al nivel de la base o por debajo de el.
Revoluta.· Consta de tres miembros rígidos conectados por dos uniones y montado sobre una base rotatoria fig. 1-1d, como el arreglo cinemático es parecido al brazo humano, las uniones de 'este tipo de robot son frecuentemente referidas como la cintura, el hombro y el codo. La posición de la mur'leca pueda sor especificada por tres ángulos que representan la rotación de la base, elevación y alcance. La ventaja del robot revoluta es su habilidad de alcance hacia arriba y hacia abajo y la habilidad de contracción. Su versatilidad y alta flexibilidad mecánica le permite el ser de fácil aplicación en muchas situaciones. Se puede mover a altas velocidades y tiene el espacio de trabajo más elaborado y grande, en relación a su tamar'lo. Con esto se minimiza el área física que ocupa en el piso de la planta. Su mayor desventaja es el costo, en general es el més costoso de todos los tipos de robots. Es más difícil de con·struir el controlador y por lo tanto cuesta más, otra desventaja es la poca precisión dado que los errores en las uniones son acumuladas al final del brazo. Es muy común esta configuración para robots pequer'los y medianos.
SCARA.- (Selective Compliance Assembly Robot Arm) fig 1-1a. Similar al robot revoluta, tiene las uniones rotatorias en el plano horizontal en lugar del plano vertical y utiHza un eje vertical de levantamiento adjunto al efector. Tal diser'lo tiene propiedades tanto del robot revoluta como del cilíndrico. Debido a su estructura en la dirección vertical puede manejar cargas mayores que otros robots para ensamble.
8

1.3.2 POR EL CONTROL DE SU MOVIMIENTO
Los robots industriales comercialmente disponibles pueden ser clasificados dentro de cuatro categorías de acuerdo al tipo de control de su movimiento: de secuencia limitada, punto a punto, trayectoria continua y robots inteligentes. Estos términos describen el movimiento que el manipulador puede hacer dentro de su espacio de trabajo.
Secuencia Limitada.· Estos robots no indican las posiciones relativas de las uniones, no se puede saber cuando se llego a la posición deseada. Representa el nivel más bajo de control. Son controlados por medio de interruptores y/o topes mecánicos, normalmente están limitados por dos puntos, inicial y final, aunque pueden incluir paradas intermedias. Establecer las posiciones y secuencias de estos topes y/o interruptores involucra una preparación mecánica del manipulador más que una programación como tal. Esto limita el número de puntos que pueden ser especificados dentro de un programa. Toman la pieza de trabajo de una parte y la ponen en otra, son los robots más simples y baratos de todos además de ser de fácil mantenimiento. Excelentes para trabajos simples y en general tienen una operación buena y cuando fallan las reparaciones son rápidas y simples.
Punto a Punto.- Son los robots que mueven su brazo de un punto a otro y son capaces de desempei'lar ciclos de movimientos consistentes en localidades de puntos deseados y acciones relacionadas además que son los más comunes. En términos más generales la descripción de la operación punto a punto es como sigue: el robot se mueve a una localidad definida numéricamente y luego el movimiento es detenido, el efector realiza su tarea con el robot permaneciendo estacionario, una vez que se ha completado la tarea el robot se mueve al segundo punto y el ciclo es repetido. En un sistema punto a punto el camino del robot y su velocidad no tienen significancia mientras se traslada de un punto a otro. El robot punto a punto puede mover más de uno de sus ejes a la vez sin embargo, hay dos estructuras básicas en los sistemas roboticos punto a punto. En la primera estructura cada uno de los ejes se mueve de un punto a otro tan rápido como puede y por lo tanto, el camino desde el punto inicial hasta el punto final no esta controlado. La otra estructura se aplica a sistemas punto a punto más sofisticados en los cuales el movimiento en todos los ejes termina simultáneamente. Estos robots pueden ser programados para moverse de un punto a otro dentro de su espacio de trabajo. Si bien el robot punto a punto se puede mover a cualquier lugar dentro de su espacio de trabajo no necesariamente lo hace en línea recta. Para asegurar que el robot punto a punto siempre describa una línea recta en su trayectoria se utiliza un método de control especializado. Este método forma parte de una categoría general de robots punto a punto, llamada robots de trayectoria controlada. Para lograr el desplazamiento en linea recta con un
9

robot punto a punto simple es necesario programar muchos puntos entre el punto inicial y el punto final, entre más puntos se programen más recta será la trayectoria.
Trayectoria Continua.· El robot de trayectoria continua puede ser programado para seguir cualquier camino deseado y desempet\ar ciclos de movimientos en los cuales la trayectoria esta controlada. En los robots de trayectoria continua todos los ejes se pueden mover simultáneamente a diferentes velocidades. Estás velocidades sin embargo, están coordinadas bajo el control de una computadora, de manera que se obtenga la trayectoria deseada. En la operación de trayectoria continua la posición de la herramienta del robot al final de cada segmento y el radio de las velocidades de los ejes determinan la trayectoria generada. Este tipo de robot es usualmente programado por medio de un dispositivo de mando en el que cada una de las uniones del robot es representada pudiendo controlar al manipulador directamente. Cada unión esta equipada con un codificador, el cual convierte el movimiento ordenado por el dispositivo de mando en una gran secuencia de números que el controlador interpreta. Por lo tanto, el robot recuerda no solo el camino exacto a través del cual se movió sino que también la velocidad con que lo hizo. En realidad este tipo de robot es un tipo de robot punto a punto solo que el controlador examina cientos de veces por segundo la localización del manipulador y guarda cada punto en su memoria. La trayectoria en línea recta no es problema para este tipo de robot, solo hay que especificar el punto inicial y el punto final y el controlador calcula el resto de los puntos de la trayectoria.
Robots Inteligentes.· L-0s robots inteligentes constituyen una clase creciente de robots industriales que poseen la capacidad no solamente de reproducir un ciclo de movimientos programados sjno que también de interactuar con su medio ambiente de una manera que pareciera inteligente. Estos también pueden alterar su ciclo programado como respuesta a condiciones que ocurren en su espacio de trabajo, pueden tomar decisiones lógicas basadas en información sensorial recibida de la operación. Los robots de esta clase tienen la capacidad de comunicarse durante su ciclo de trabajo con humanos o sistemas basados en computadoras. Los robots inteligentes son usualmente programados usando un lenguaje simbólico y parecido al ingles.
1.3.3 POR EL CONTROL DE SU FUENTE DE POTENCIA
Con los robots de secuencia variable se hace necesario el poder detener la unión particular del brazo en cualquier punto de su viaje. Hay dos formas de controlar la fuente de potencia de un robot, las que son servo controladas y las que no lo son.
Las que son Servo Controladas.· Involucra el uso de servo mecanismos en cada unión los cuales verifican efectivamente tanto la posición de la unión como la posición en que el controlador requiere que este dicha unión. El brazo se mueve
10

razonable para el movimiento del robot. Los robots servo controlados son más versátiles que su contraparte, ya que pueden programarse para detenerse en cualquier punto dentro de su espacio de trabajo. Los robots servo controlados son usados en tareas complejas que requieren fácil programación, un gran número de movimientos y donde el costo de una computadora de gran capacidad sea justificable. El control necesario para operar un robot servo controlado es mucho más complejo que el que no es servo controlado. La principal diferencia entre ambos es el sistema de retroalimentación. Cualquier punto dentro del espacio de trabajo puede ser identificado y ensenado al robot. El control se encarga de mover al manipulador de una posición a otra hasta que el error es eliminado.
Los que no son Servo Controlados.- Es el más simple de los dos métodos, donde solamente se manda la potencia a la unión hasta que el brazo ha llegado a la posición deseada. Esta posición final es fijada por medio de topes mecánicos, estos topes son normalmente bloques de acero fijados en la base del robot. Dado que el lazo de control es tipo abierto no hay retroalimentación. Usando este proceso el robot se puede mover muy rápido de una parada a la siguiente y el movimiento puede ser muy preciso ya que la posición depende del emplazamiento físico de los topes. La desventaja de este tipo de control es la dificultad para establecer de manera precisa un conjunto complejo de topes, por lo que las tareas del robot son difíciles de programar. Otro método es el de utilizar motores eléctricos de pasos, la dificultad con este procedimiento es que el motor no tiene buen posicionamiento si esta sobrecargado. Una vez que ocurre el desplazamiento no deseado los movimientos subsecuentes estarán fuera de lugar y se generará un gran error. Los robots que no son servo controlados son usados donde solo se requieren tres o cuatro ejes de movimiento, la velocidad del proceso es alta y se necesita gran precisión. Las tareas no deben de tener un gran número de pasos y la aplicación no debe de cambiar muy frecuentemente para que no requiera reprogramación frecuente.
1.4 SISTEMAS INDUSTRIALES
Muchos dispositivos han sido construidos para realizar tareas pesadas dentro de la industria o en ambientes peligrosos. Uno de ellos es el que General Electric llamó Man-Mate 2000, este fue disenado para transportar 3000 lb en una área considerablemente grande ( 11 a 17 pies) y fue controlado a través de un formato maestro-esclavo. Muchos decían que este dispositivo fue mucho más allá de su tiempo y probablemente demasiado caro, sin embargo fue un excelente esfuerzo para reemplazar al ser humano en el área de trabajo.
Otro robot fue el Manipulador que trabajaba debajo del agua, también fue desarrollado por General Electric para trabajos en los que necesitaba sumergirse a grandes profundidades. Este robot estaba operado remotamente a través de un
11

Otro robot fue el Manipulador que trabajaba debajo del agua, también fue desarrollado por General Electric para trabajos en los que necesitaba sumergirse a grandes profundidades. Este robot estaba operado remotamente a través de un sistema esclavo-maestro. Las tres primeras uniones estaban operadas por un modulo de cremallera-piñón movidos por un cilindro. El sistema fue muy poco suave, debido a que el tamaño del piñón era pequeño y producía problemas de arrastre. Este tenia una capacidad de levantar hasta 65 lbs y levantaba hasta 5.5 pies y solo pesaba 320 lbs.
Tal vez el más popular robot de esta década ha sido el AdeptOne de Adept Technology lnc. El AdeptOne es un robot planar y utiliza en sus transmisiones motores de acoplamiento directo. La unidad es pequeña y luce limpia y es suave y confiable con buena resolución.
Otro robot el cual ha tenido una amplia aceptación en aplicaciones donde se requiere trabajo pesado es el Cincinnati Milacron · électric serie T3 figura 1-2a. Algunos de estos modelos exciben resoluciones notables de 0.01 pulgadas en un amplio espacio de trabajo.
El sistema gantry figura 1-2b ha llegado a ser recientemente una configuración estandard para los robots industriales. Esto permite una plataforma de 2 grados de libertad que cubre un amplio espacio de trabajo con un manipulador de 5 o 6 grados de libertad sin interferencia a todos los lados del área de trabajo. Estos dispositivos pueden ser un poco largos. Tienen el problema de operar con poca precisión. Es muy robusto y por consecuencia caro.
1.5 ESTRUCTURAS PARALELAS
Esta sección tratará sistemas en los cuales están basados en estructuras paralelas. Una de las primeras manos habilldosas figura 1-3a fue desarrollada por Skinner. Esta opera con solo 4 motores y es capaz de sujetar de 4 modos diferentes. Esto puede provocar que el sistema sea poco suave. Esto es mecánicamente simple y ligero.
La mano con 3 dedos desarrollados por Salisbury es capaz de maniobrar con objetos con gran habilidad . Cada dedo es un modulo que tiene 3 grados de libertad y es controlado por 4 cables. El peso total del sistema es 14.5 lbs. Cada dedo contiene sensores de tensión para monitorear la fuerza de sujeción y por lo tanto proporcionar retroalimentación al motor de transmisión. La fuerza de mayor magnitud en la punta del dedo es de 1 O lbs. Este sistema esta siendo analizado extensivamente para crear un software de control de fuerza en relación para ser posible la manipulación de objetos con gran precisión. Esta clase de control fuerza-
12

l'i.g. 1-21 labot CinciDDati Nilacroa
lig 1-2b Bmot Gantq
lipa 1·2 Sistrlas Irdastriales
13

movimiento en sistemas paralelos es un problema interesante en la actualidad para la comunidad de investigadores
La plataforma caminante de 4 piemas, es un dispositivo ligero esta configurado por 4 módulos idénticos teniendo 3 entradas cercanas al cuerpo el cual usa pantógrafos amplificadores (3 a 1) para obtener un rango de salida deseada para el movimiento de cada piema. Cada pantógrafo esta disetlado con una estructura resistente a fuerzas estáticas. El sistema se disetlo específicamente para resistir fuerzas gravitacionales, mostró una excepcional habilidad en sus piernas. Cada piema contenía un sensor para medir la presión de contacto y otro sensor para sentir la proximidad de obstáculos. La impresión general fue un atractivo balance de tecnologías.
Probablemente uno de los primeros documentos que hablan sobre estructuras paralelas fue hecho por Stewart en 1965. Este tratado habla sobre el desarrollo de una plataforma de multi-piemas que desarrollaba 6 grados de libertad en sus movimientos. En la versión de 3 piemas figura 1-3b, cada piema es un modulo idéntico y es mantenido en completa simetría. Previó al documento de Stewart, una máquina de 6 piemas fue usada por V.E. Gough como una plataforma de prueba de llantas. J. Tindale recomendó la plataforma de Stewart como la base para los sistemas de maquinas que necesitan alta precisión y habilidad. En conclusión todas las partes apuntaban hacia el paralelismo y la modalidad por que harían los sistemas económicos, rígidos, capaces de transportar grandes cargas y relativamente ligeros. Esto hacia que al transportarse con la carga tuviera poca habilidad debido a su tamatlo, esto tendía a ocupar mucho de su volumen de trabajo, esto requería un alto nivel de software para su control de fuerza para crear uría salida de fuerza deseada. Los dispositivos paralelos pueden ser operados con un análisis cinématico relativamente simple (posición, velocidad y aceleración), y esto puede llevar a obtener una gran cantidad de configuraciones geométricas y en todas las escalas.
1.6 ARQUITECTURA MODULAR PARA ESTRUCTURAS DE ROBOTS
La modularidad en las computadoras personales es ahora una realidad aceptada y necesaria en la arquitectura de las computadoras. Estos sistemas están acompatlados con interfaces estandarizadas y software de control. La modularidad y la arquitectura es esencial para el crecimiento de las tecnologías mecánicas, especialmente si sus costos llegan a ser más competitivos. Está clase de arquitectura permite una evolución continúa de los sistemas mientras previene obsolescencia.
Últimamente el éxito de una tecnología agresiva para la robótica dependerá de nuestra habilidad para disetlar el sistema conociendo el amplio rango de los
14

Fig. 1-3a Robot de Skinner
--l'ig. 1-~ Robot• 8tewart
rttum 1-3 Elti:u,tums .. mldn
15

requerimientos operacionales en términos de un exceso de 100 o más parámetros del sistema disponible. Enfrentando todos estos parámetros simultáneamente se podría exceder la capacidad de la computadora más potente. Por lo tanto, una estrategia para disel'lar debe de ser desarrollada y debe de existir una intervención interactiva por el disel'lador a través de la simulación. Los disei'ladores de sistemas computacionales expresan molestia ya que dicen la mayoría de las veces que tienen una estrategia incompleta para el disei'lo. No es difícil de comprender que el disel'lador de robots enfrenta tareas mucho más difíciles que las de un disel'lador de computadoras.
La presente generación de máquinas inteligentes tienen limitaciones básicas que necesitan ser solucionadas antes que la robótica y otros sistemas de manufactura avanzados puedan ser integrados dentro de las operaciones actuales. Un ejemplo de esto, es el programa de la Universidad de Texas para estudiar el aprovechamiento de la modularidad, con esto se incrementa potencialmente el mercado y se decrementa el ciclo de tiempo de disel'lo para robots y máquinas de precisión similar. La modularidad va encaminada para solucionar los problemas de precisión, control, percepción sensorial y disei'lo.
Actualmente la falta de precisión es un problema serio relacionado en las aplicaciones de la robótica. Aun cuando la precisión de posicionamiento puede ser tan alta como 0.05 pulgadas y bajo condiciones de carga puede ser afectada hasta de 0.2 a 0.4 pulgadas debido a la flexibilidad de la estructura. La deformación asociada puede ser resultado de las fuerzas dinámicas las cuales son usualmente conocidas. La velocidad de operación y la forma de ensamblaje constituyen la solución a este problema.
El control numérico requiere un algoritmo de control preciso. No se necesitan formulaciones matemáticas como actualmente existen para el control de los manipuladores. Programación punto-a-punto es la forma para la definición de tarea. Control inteligente en la forma de actualizar compensando para los cambios en el medio ambiente de trabajo y bajo condiciones de carga no puede ser logrado hasta que la formulación de tiempo real de un modelo dinámico sea posible.
La retroalimentación ·de sensores es ampliamente aceptada como uno de los componentes claves en el desarrollo de la robótica. Importantes logros se han alcanzado en los campos de visión, tacto, fuerza-torque y detección de proximidad. El sensor de fuerza-torque es especialmente importante para la comunicación hombre-máquina y resalta la inteligencia de la máquina. La poca cantidad de dispositivos empleados en los sistemas actuales indican el bajo nivel de inteligencia disponible en la máquina. Las posiciones en las uniones representan datos esenciales en los análisis dinámicos de las formulaciones y también el progreso que se ha hecho sobre los decodificadores de posición. Desafortunadamente, el alto costo requerido para obtener altas resoluciones representa un dilema para los disel'ladores actualmente.
16

Debido a la· generalidad del movimiento durante la operación y el gran número de parámetros del diset'\o, este se hace muy caro, y consume una gran cantidad de tiempo y se hace una tarea desafiante. como por ejemplo, un manipulador serial de 6 grados de libertad, puede tener 18 parámetros geométricos, 42 parámetros de masa, 36 parámetros de deformación y 1 e parámetros de actuador. El diseño y el desarrollo de tal estructura puede ser bastante cara en términos de recursos. El Cincinnati Milacron de la serie T3 requirió 7 millones de dólares y 7 años de desarrollo para llevarlo a la línea de producción. El primer sistema de manipulador remoto para uso en tareas espaciales fue liberado con un costo total de 100 millones de dólares. La próxima generación de manipuladores remotos espaciales esta estimado para costar 1 billón de dólares.
Los diseñadores deben de asimilar rápidamente los avances en la tecnología y rápidamente adaptarlos a la demanda del mercado (con esto se evita obsolescencia). Las uniones modulares, las articulaciones, el software y los sensores deben de simplificar soluciones para los problemas actuales y permitir adaptaciones flexibles de nuevos avances y así convertirse en sistemas modulares. Los sistemas deben de ser actualizados sin grandes cambios de producción en el lugar de trabajo y evitando invertir grandes capitales en la modernización.
17

CAPITULO 2
LA PROPUESTA DE MOTORES DE ACOPLAMIENTO DIRECTO
2.1 PERSPECTIVA HISTÓRICA DEL DISEAO DE ROBOTS
En el inicio de 1960's la Cia. Unimation en Connecticut E.U. , Hizo la primera instalación con éxito de lo que llamamos actualmente robot industrial. Su robot fue uno de cinco ejes, hidraulicamente manipulado capaz de transportar varios kilogramos de carga a lo largo de una dirección predeterminada. Después de un análisis cuidadoso, sus robots fueron instalados para cargar y descargar piezas de trabajo en máquinas de fundición. La tarea era repetitiva, era un trabajo sucio, tedioso, ruidoso y peligroso. El robot, capaz de repetir movimientos instruidos, llego a incrementar los requerimientos para remplazar tareas manuales poco placenteras.
La construcción mecánica del primer robot industrial de Unimate partió de una máquina tradicional disenada de muchas formas. El brazo fue básicamente una estructura encantilibre con varios grados de libertad, la mayoría de las cuales eran uniones de revoluta que formaban una cadena cinemática cerrada. Esta estructura permitía al robot un movimiento flexible y la posibilidad de obtener un amplio espacio de trabajo en relación con el espacio ocupado por el mismo robot. También, el robot puede operar en áreas con poco espacio. La cadena cinemática abierta, sabía de la alta movilidad y los requerimientos de flexibilidad en el diseno de la estructura cinemática. Como sea, está estructura cinemática creaba un número de problemas en el diseno de la máquina. La precisión del posicionamiento en el punto final a lo largo del brazo· en cantilibre es considerablemente bajo; y la rigidez mecánica de la construcción del brazo es inherentemente pobre. También, una cantidad pequena de error en cada unión de revoluta generaba que al final del brazo el error creciera ampliamente. Como resultado, la precisión del brazo para la manipulación del brazo con unión de revoluta debe ser significantemente alto para el brazo articulado. Los actuadores hidráulicos utilizados para el primer robot de Unimate fueron escogidos cuidadosamente por el alto rendimiento requerido para el sistema de transmisión. Las transmisiones hidráulicas son generalmente de alta precisión, actuadores de alta potencia y particularmente una relación de torque-peso alta. En consecuencia, los robots con transmisión hidráulica son capaces de movimientos precisos bajo condiciones severas de carga.
En relación a las aplicaciones , los robots industriales se han expandido, diferentes tipos de robots fueron desarrollados para un sin número de tareas. Para tareas ligeras, los robots con transmisión eléctrica llegaron a ser los más prominentes. En soldadura de arco, por ejemplo, los robots eléctricos son los más ampliamente usados.
18

Comparados con los de transmisión hidráulica, transmisiones electro-mecánicas son, generalmente, menos caras y limpias, así como fáciles de mantener. Por lo tanto los robos eléctricos llegaron a reemplazar a los robots hidráulicos en muchas aplicaciones.
Generalmente los motores eléctricos producen su max1ma potencia a una alta velocidad. En otras palabras, los motores eléctricos producen pequeños torques mientras rotan a grandes velocidades. En consecuencia un reductor de velocidad es necesario para los motores eléctricos relacionados con grandes cargas. Los brazos de los robots son usualmente movidos a bajas velocidades.a menos de una revolución por segundo, mientras que los torques máximos requeridos van desde unos pocos N-m hasta varios cientos de N-rn. Un gran reductor de velocidad del orden de 1 : 100 es típicamente requerido para motores servo estándar.
El disel'lo de una transmisión electro-mecánica es complicado por la necesidad de un reductor de velocidad. El reductor debe proporcionar una alta precisión. Particularmente importante es que el reductor no debe introducir arrastre o perdida de movimiento, lo cual afectaría directamente a la precisión de la posición. Incluso una cantidad pequel'la de arrastre próxima a una unión afectará significativamente como un error en el posicionamiento del brazo. Por lo tanto el arrastre debe ser totalmente eliminado en cada unión.
La fricción es otro problema en el disel'lo de un reductor de velocidad. Como lo desaibiremos después, los engranes de anti-arrastre y otros tipos de reductores con bajo arrastre son caracterizados por una considerable fricción. En muchos casos la potencia del motor disipada en el engranaje, cantidades superiores el 30 % del total de la potencia debido a la gran fricción. La fricción también provoca una pobre precisión en el control, lo cual provoca un serio problema en aplicaciones que requieren una alta precisión. La fricción es una característica no-predecible, y es difícil de identificar, por lo tanto difícil de compensar.
Los mecanismos de engranajes son frecuentemente una de las mayores fuentes de deflecciones mecánicas. La pobre rigidez mecánica causa estatismo en la deflección del brazo si no que también respuestas dinámicas limitadas. La ganancia del lazo cerrado del servo sistema no puede ser incrementado si el alto orden de retardo resultante de la baja rigidez hace el sistema inestable. Esto limita severamente al ancho de banda y a la precisión del sistema de transmisión.. La poca rigidez en el engranaje pudiera también causar vibraciones indeseables. Este problema de vibración es una característica critica particularmente para una alta velocidad de manipulación. Después de llegar a un punto especifico, el robot no puede proceder al siguiente paso de movimiento, hasta que termine la vibración residual causada por la terminación de la deflexión del engranaje. Por lo tanto, la rigidez mecánica es un problema crucial cuando el tiempo de operación es corto.
Tradicionalmente, la velocidad y la precisión son las principales características en el diset\o de las máquinas. Los robots son algo diferentes ya que la velocidad y • la precisión no son necesariamente la meta primordial en el diseño. Esencialmente las
19

características del robot son descritas por las palabras; flexibilidad, inteligencia, habilidad, etc. Consecuentemente, los esfuerzos de investigación van encaminados a que los robots puedan ser más flexibles, inteligentes y habilidosos.
En relación a tareas de manipulación, tales como ensamblar partes mecánicas, es importante conocer el rendimiento del robot a través de la interacción mecánica con el medio que lo rodea (medio ambiente). El robot es requerido para aplicar fuerzas de contacto también como para controlar su localización. La fuerza de control y el control de la deflexión son necesarias para la interacción mecánica que se requiere. Los esquemas de control tal como los anteriores, han sido implementados en robots tradicionales, que fueron diser'\ados al principio como dispositivos de posicionamiento. Los sistemas de transmisión de estos dispositivos son básicamente controlados en posición, y no son necesariamente apropiados para controlar fuerza. Los reductores en transmisiones electro-mecánicas como se comento anteriormente crean una gran fricción, lo cual genera pequer'\os torques que provocan disturbios en el sistema de control de fuerza y degrada el rendimiento del control.
2.2 EL SURGIMIENTO DE LA TRANSMISIÓN DE ACOPLAMIENTO DIRECTO.
El acoplamiento directo es, básicamente, una transmisión eléctrica en la cual no es necesario usar un reductor de engranes. El rotor del motor eléctrico esta acoplado directamente a la carga, por lo tanto el engranaje mecánico es completamente eliminado. El robot de acoplamiento directo esta definido para estar en un brazo mecánico donde todas o algunas partes de las uniones activas de los brazo son activadas con la transmisión de acoplamiento directo.
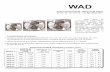
La fig. 2-1 muestra la construcción básica de una unión de acoplamiento directo de un robot. La unión de acoplamiento directo consiste de un par de articulaciones, el motor y los baleros. El motor esta compuesto del estator y el rotor. El estator esta alojado en una carcaza conectada a una de las articulaciones del brazo, usualmente a la articulación más cercana, el rotor esta directamente acoplado a la unión, la cual esta conectada a la otra articulación del brazo. Por lo tanto la articulación del brazo es rotada directamente por el torque entre el rotor y el estator, de aquí en adelante lo llamaremos el acoplamiento directo.
El problema que los engranajes no pueden evitar puede ser solucionado completamente por el método de acoplamiento directo.El arrastre es completamente eliminado y la fricción es reducida significativamente. Esta porción de fricción solo pudiera existir en los baleros que soportan la flecha. La construcción mecánica puede ser más rígida que el mecanismo de transmisión con engranes y la construcción de acoplamiento directo es mucho más confiable y fácil de mantener.
Estas características pudieran resultar con un gran rendimiento de control. La precisión del posicionamiento pudiera ser mejorada significativamente. Desde la
•IBLIOTEOA 20

STATOR
HOUSING
Figura 2-1 Construcci6n Basica de ~na UQi6n de Acoplamiento D. (Motor de Acot:,lamiento D1rectoJ
21

simple construcción del mecanismo posee menos incertidumbre, por ejemplo baja fricción, y ningún arrastre, la repetibilidad del posicionamiento puede ser en orden de magnitud mejor que el de transmisión de engranes. El mecanismo simplificado también nos permitirá identificar la dinámica del sistema con poca dificultad. El comportamiento del sistema de transmisión puede ser modelada con precisión, y por lo tanto la respuesta dinámica es más predecible. Estas características estáticas y dinámicas hacen fácil y efectiva la aplicación de un esquema de control avanzado, incluyendo control de fuerza y control de movimiento de flexión. Por lo tanto el robot de acoplamiento directo puede ser una prueba deseable para estudios de manipulación avanzada.
2.3 HISTORIA DE LOS ROBOTS DE ACOPLAMIENTO DIRECTO
El concepto básico del robot de acoplamiento directo fue primero establecido por H. Asada in 1980. El y su colega T. Kanade desarrollaron el primer prototipo en 1981 en el Instituto de Robótica de la Universidad de Camegie Mellan. La foto 2-1 muestra su robot, el brazo UCM D-D Modelo 1, un brazo manipulador con seis grados de libertad conteniendo en todas sus articulaciones transmisiones de acoplamiento directo. La primera unión, la más próxima al techo, causa una rotación con eje vertical, mientras que la segunda unión rota el brazo superior en el eje horizontal. La tercera unión rota el brazo a través de la línea central del brazo superior. El motor de transmisión de la tercera unión esta fija al brazo superior y esta localizado en el otro lado de la parte del codo, asf que el motor actúa como un contrapeso de la parte del codo. El peso de gravedad del segundo motor esta entonces reducida con este balance de masa. La cuarta unión es el codo, que provoca que de vuelta el brazo, mientras que la quinta unión rota el brazo en su línea central. El motor de la quinta unión esta localizado dentro de la parte del codo, así que la carga del cuarto motor puede ser reducida. La ultima unión es la muneca, que hace girar los sujetadores del brazo en un eje perpendicular al brazo.
Los motores usados para las tres primeras uniones son motores de torque de corriente directa que usan imanes de ALNICO en el estator. El torque máximo del motor más grande , esto es, la del primer motor supera los 150 N-m, mientras que el diámetro del estator es de 60 cm. Los motores de las ultimas tres uniones son también motores de torque de corriente directa (CD), pero los imanes permanentes usados son imanes de Cobalto-Samario, los cuales tienen tres veces más magnetismo que los imanes de ALNICO.
El primer prototipo desarrollado en el Instituto de Robótica de la UCM (Universidad de Carnegie-Mellon) demostró las ventajas potenciales y la posibilidad de la propuesta del acoplamiento directo. El diseno del prototipo, revelo que este nuevo tipo de robot necesita motores con más potencia y con tamanos más compactos. Los motores usados por el brazo de la UCM no tienen la capacidad de mover grandes cargas, además el tamano de los motores es muy grande lo que genero que la construcción del brazo fue voluminoso y pesado.
22

..... ...
: r
--· Foto 2-1 Brazo de Acoplamiento Directo Modelo! 1 Oé'. la Universidad de Carnegie Mellon

En el Instituto Tecnológico de Massachusetts (ITM), mejoraron los robots de acoplamiento directo que fueron desarrollados por H. Asada y K. Youcef-Toumi. Los motores usados para los brazos del ITM son motores de torque de CD sin escobillas con imanes de Cobalto-Samario, lo cual genera de 3 a 1 O veces torques más grandes comparados con el brazo de la UCM. Por ejemplo, el motor más grande de uno de los brazos del ITM pude producir un torque de salida de 660 N-m, mientras que el diámetro de su estotro es solo de 35 cm. En comparación con el motor más grande del brazo de la UCM, el torque es tres veces más grande, mientras que el diámetro es reducido a la mitad del motor anterior.
La foto 2-2, muestra el brazo D-D Modelo I del ITM, con tres grados de libertad, el manipulador del brazo tiene articulaciones tipo serial. El brazo fue construido durante el período de 1982 y 1983, y está instalado actualmente en el Laboratorio de Inteligencia artificial del ITM. El robot tiene una estructura cinemática única, lo cual permite eliminar las cargas gravitacionales en motores. La primera unión rota toda la parte superior del cuerpo en el eje vertical, lo cual no produce ninguna carga gravitacional sobre el primer motor. La segunda unión rota el brazo en la línea de centro del brazo superior, paro el movimiento del brazo superior esta restringido dentro del plano horizontal . La tercera unión esta localizada en el codo, y causa el movimiento de curvatura del brazo. La masa del brazo esta balanceada con su contrapeso, el tercer motor no esta expuesto a ninguna carga gravitacional. Similarmente, el eje de la segunda unión pasa a través del centro del brazo, por lo tanto ninguna carga gravitacional actúa sobre el segundo motor.
La foto 2-3 muestra el brazo D-D Modelo II del ITM, el cual fue desarrollado por el mismo grupo del ITM de 1983 a 1984. Para este brazo, ellos emplearon un mecanismo de transmisión paralelo con una cadena cinemática de lazo cerrado. Los dos motores superiores localizados en la base del soporte, mueven las dos articulaciones de entrada del mecanismo del paralelogramo, lo cual causa un movimiento vertical de dos grados de libertad en el extremo del brazo. Una de las características de la construcción de este brazo es que el motor de gran peso de la unión del codo del modelo previo fue reemplazado por un motor montado en la base de la estructura y el torque es transmitido a través del mecanismo del paralelogramo. Este mecanismo de transmisión remoto reduce el peso del brazo significativamente y mejora el rendimiento dinámico.
La foto 2-4 muestra otro tipo de brazo de acoplamiento directo desarrollado por el ITM, el brazo D-0 modelo IV. Los dos motores alineados sobre el eje vertical mueven el mecanismo del paralelogramo horizontal. El movimiento de las articulaciones esta limitado en un plano horizontal, ninguna carga gravitacional actúa sobre los dos motores. Los robots con este tipo de construcción cinemática son frecuentemente llamados robots SCARA, los cuales son ampliamente usados en operaciones de ensamblaje, particularmente en tareas de ensamblajes planares.
La fabricación simple de los robots SCARA es la apropiada para robots de acoplamiento directo: pocos grados de libertad y construcción sin carga gravitacional,
211

/
/ • •
·•· • • •
~-. lt ..
_,
-~·-·· ------------Foto 2-2 Brazo de Acoplamiento Directo Modelo I del ITM
25

"" • •
, r •
Foto 2-3 Robot de Acoplamiento Directo Modelo 11 del ITM
26

Foto 2-4 Robot de Acoplamiento Directo Modelo IV del ITM
27

facilitan la construcción de robots. El primer robot de acoplamiento directo comercializado empleó la misma construcción cinemática como la del róbot SCARA. La foto 2-5 muestra el robot de acoplamiento diredo AdeptOne desarrollado por ADEPT Technology lnc., en Sunnyvale, California en 1983. El brazo tiene cuatro grados de libertad. Los dos motores que están localizados en la base, producen movimiento en las articulaciones horizontales. Los otros dos motores que están sobre el ante-brazo, uno mueve el husillo guía el cual produce un movimiento traslacional a lo largo del eje vertical, mientras que el otro motor rota los dedos sujetadores a través del eje vertical.
Para reducir el peso del brazo, algunas de las uniones son movidas remotamente por motores localizados en posiciones cercanas. La segunda unión, que esta en la unión del· codo, es movida por uno de los motores que están en la base a través de una banda de acero entre el motor y la unión del codo. La unión de la mul'leca es movida por un motor que esta posesionado en el codo a través de otra banda de acero.
La máxima velocidad del brazo es 9 mis, lo cual esta definido para ser la velocidad de maniobra, cuando todas las uniones están a una gran velocidad. La repetibilidad, que es, el error de posicionamiento máximo cuando sigue el mismo destino a lo largo de la misma trayedoria, esta determinado para ser +/- 0.001 pulgadas ó +/- 0.0254 mm. Ambas especificaciones son en orden de magnitud mejores que los robots tradicionales con redudores de engranes.
Los motores usados por el robot de acoplamiento directo de AdeptOne son especialmente disel'lados con alto torque, los motores fueron fabricados en Santa Rosa California por Motornetics. Los motores son de tres fases de reludancia variable y estos tienen la peculiaridad de tener bastantes dientes en el rotor. El motor produce un gran torque con un consumo bajo de potencia, cuando rota a baja velocidad.
La foto 2-6 muestra otro robot de acoplamiento directo comercializado por Matsushita Electric Co., Ud., en Osaka Japón. El robot tiene la misma construcción cinemática que el brazo modelo IV del ITM. La longitud del brazo es aproximadamente de 60 cm, un poco más pequel'la que la del robot de AdeptOne. Los motores usados por el robot Matsushita son motores de torque sin escobillas con imanes de Cobalto-Samario. Una de las caraderísticas del robot Matsushita, es que el motor, cuando incorporado con un amplificador de alto rendimiento.produce una excelente linealidad, mientras que produce un gran torque con una pequel'la discontinuidad en el torque (ondulación). Esto nos permite mejorar la precisión del control, no solo el control de la precisión si no que también en el control del troqué. Uno puede también cambiar la flexibilidad del punto final en un amplio rango; esto puede ser extremadamente suave ó duro simplemente cambiando la ganancia del sistema de transmisión.
Otra caraderlstica del robot Matsushita es la alta precisión. Los sensores de posición fueron especialmente desarrollados para los robots de acoplamiento directo. El sensor es. un decodificador tipo interferometro láser, el cual tiene una alta resolución. Con este decodificador y el sistema de transmisión del motor, la repetibilidad del robot Matsushita es menor a+/- 0.010 mm ó +/- 0.0004 pulgadas. Esto permitirá incrementar
28

Foto 2-5 Robot de Acoplamiento Directo AdeptOne de Tecnologias Adept
29

• • •
Foto 2-6 Robot de Acoplamiento Directo para alta velocidad Pana Robo HDD-1 de Industrial Eléctrica Matsushita
30

las necesidades para operaciones de alta precisión, particularmente en ensambles de precisión de partes eléctricas.
La foto 2-7 muestra un robot de acoplamiento directo de un gran tamaflo para un cortador láser de hojas metálicas. El motor fue desarrollado por Shin Meiwa lndustry Ltd en Japón. Un rayo láser pasa a través de las articulaciones del brazo, cambia su dirección en las uniones del brazo y choca contra la placa metálica. La velocidad y la precisión del cortador metálico depende del rendimiento del robot utilizado. El robot de acoplamiento directo es capaz de trazar una curva espacial compleja a una alta velocidad mientras mantiene una alta precisión. En el cortador láser, es particularmente difícil de mover alrededor de las esquinas ó trazar una curva circular de radios pequeflos, porque una aceleración extremadamente grande es requerida por el robot. El robot del cortador láser tiene una méxima aceleración de más de 5 G en la punta del brazo.
Para lograr una gran aceleración, las articulaciones del brazo son hechas de grafito, el cual reduce el peso del brazo e incrementa las frecuencias naturales. Una especial técnica dinámica de balance de masa fue empleada para diseflar las articulaciones del brazo.
31

t~~
1
1 ..
' ! 1 ·-~·:'..' .....
'1
1
Foto 2-7 Robot de Acoplamiento Directo de Alta Velocidad para aplicaciones de corte de hoja metalica por rayo laser de Industrias Shin Meiwa
32

CAPITULO 3
SISTEMAS DE TRANSMISIÓN
3.1 INTRODUCCIÓN
Los componentes claves en el diseno y control de un robot de acoplamiento directo son los motores y los amplificadores de transmisión. En orden de magnitud un gran torque debe ser generado en una carcaza campada y ligera. Fluctuaciones en torque y velocidad deben de ser minimizado para lograr un control preciso. Hay muchos otros requerimientos necesarios para los motores que son usados en robots de acoplamiento directo. En esta sección se analizan las características de los motores y discutimos algunos rendimientos estándar, los cuales son críticos para aplicaciones de robots de acoplamiento directo. Los motores usados en robots de acoplamiento directo son:
1. -Motores de torque de corriente directa, 2. -Motores de torque de corriente directa sin escobillas, 3. -Motores de reluctancia variable.
3.2.- MOTORES DE TORQUE DE CORRIENTE DIRECTA
3.2.1.· DISEAO
Los motores de corriente directa son los más simples pero los de mayor eficiencia, estos motores son ampliamente usados en transmisiones de robots. Para instalar el motor de corriente direda (CD) a el robot de acoplamiento directo, el diseno del motor debe de ser modificado para poder obtener un torque lo suficientemente grande. Los motores usados en las primeras versiones de robots de acoplamiento directo, fueron llamados motores de torque de CD, los cuales son capaces de producir torque mucho más grandes que los motores de CD nonnales. No hay una gran diferencia entre los motores de CD nonnales y los de · CD de acoplamiento directo, en principio, el segundo motor esta disenado de alguna fonna que en el torque de salida la potencia debe de ser máximizada.
Como se muestra en la foto 3-1, un tlpico motor de torque de CD consiste de un estator, un rotor y un porta-escobillas. El estator esta hecho de imanes pennanentes cementados sobre carcaza de metal, mientras que el rotor tiene
33

Foto 3-1 Motor de torque de Corriente Directa
34

devanados, teniendo varios polos sobre de el. El torque es producido en el entrehierro (en el espacio entre rotor y estator). El área total del entre-hierro "A" esta determinada entre el produdo de la longitud del rotor, L, y el diámetro del entre-hierro del cilindro, lo cual es aproximadamente el diámetro del rotor, D,,
A=L,D, (3.1)
El torque de salida esta determinado por el área del entre-hierro y el diámetro del rotor,
(3.2)
donde k0
es una constante determinada por el campo magnético en el entrehierro en el momento en que la corriente fluye por los devanados. Por lo tanto el torque de salida es proporcional al diámetro del rotor al cuadrado. Por lo tanto una forma direda de incrementar el torque es incrementar el diámetro del rotor en lugar de incrementar la longitud del rotor. Esta es la razón por la que el motor de acoplamiento diredo de. la foto 3-1 tiene un diámetro de rotor grande y una longitud de rotor corta.
3.2.2 LA CONSTANTE DE TORQUE
La ecuación dinámica del motor de torque de CD es la misma que la de un motor normal de CD. La relación direda de la armadura esta dada por
di =Ri+E+L
dl 3.3)
donde V es el voltaje aplicado a la armadura, R y L son la resistencia y la indudancia de los devanados, respedivamente, i es la corriente y E es la fuerza contraelectromotriz (fem), la cual esta dada por
E= K,mKtw (3.4)
donde K, es la constante de la fem, y a, es la velocidad angular de el rotor.
La potencia eléctrica convertida a potencia mecánica esta dada por P=Ei, que es, la caída de voltaje debido a la fem que depende de la cantidad de corriente en la armadura. Esta cantidad de potencia es la misma que la potencia mecánica producida por el rotor.
Ei = rr»Ei = f'(D (3.5)
35

Sustituyendo la Ec. 3.4 en la Ec 3.5, nosotros obtenemos la relación entre el torque y la corriente
r=K,; (3.6)
donde K, es llamada constante de torque, el cual es el mismo número que la constante de la fem cuando las unidades que usamos son el sistema internacional (SI).
La constante de torque esta determinada por el campo magnético y los parámetros geométricos del entre-hierro. Para un motor de torque ideal, la constante de torque es realmente invariable. En realidad la constante de torque varía con la posición del rotor. Considerando que el campo magnético consiste de polos discretos y la conmutación ocurre discretamente, la constante de torque varía con la rotación del rotor. Esto causa fluctuaciones en el torque de salida. La cantidad de fluctuación es representada por la discontinuidad del torque, lo cual es la relación entre la desviación del torque y el promedio del torque de salida. La discontinuidad del torque es un importante factor para aplicaciones de acoplamiento directo, por que las fluctuaciones del torque provocan movimientos suaves, particularmente a bajas velocidades y degradan la precisión del control.
Para minimizar la discontinuidad del torque, los devanado del rotor están divididos entre un cierto número de bobinas que están conectadas a el mismo número de segmentos en el conmutador. Entonces, la corriente es cambiada de una bobina a otra más suavemente. El número de polos en el estator es también incrementado en relación de obtener un campo magnético más suave.
3.2.3 LA CONSTANTE DEL MOTOR
Otra importante característica de rendimiento es referida como la potencia necesaria para producir el torque. Vamos a considerar un mal funcionamiento del motor, en la cual este no rota mientras produce un torque. La potencia consumida en el rotor es evaluada usando las Ecs. (3.3) y (3.6), así que
. R r R 2 P=VI =-r-= Tr,
K. K, Á, (3.7)
ó r=K.ll (3.8)
donde la constante K. esta dada por
K.= }¡_<Nm!Jw} (3.9)
36

Como se muestra en la Ec (3. 7) el torque de salida es proporcional a la raíz cuadrada de la potencia consumida. La constante de proporcionalidad, K., es un factor importante para la eficiencia del motor de torque en términos de transducción de potencia eléctrica a torque mecánico. La magnitud de la constante es, tan grande como el torque producido llega a ser, y tan pequena como al potencia consumida. La constante es referida como la constante del motor - una de las más importantes especificaciones del motor de acoplamiento directo.
Vamos también a considerar condiciones de estado estable cuando el motor esta rotando con una velocidad angular constante m. De las Ecs. (3.2),(3.3),(3.5) y (3.8), nosotros obtenemos
(3.10)
La fig. 3-1 muestra una gráfica que muestra las características para un voltaje de armadura dado. La constante de del motor al cuadrado, K., designada como la pendiente negativa de la curva característica. El valor de la pendiente negativa para un efecto de ventilación natural, el cual resulta de la fem. La pendiente negativa contribuye a estabilizar el sistema.
Cuando rota a una velocidad constante m, el motor produce una potencia mecánica p. dada por
(3.11)
el cual toma un valor máximo para un voltaje de armadura dado V. Como se muestra en la fig. 3-1, La potencia es máxima cuando se obtiene la mitad de la velocidad máxima y la mitad del torque máximo. Esto proporciona condiciones de operación optima, en la cual el motor puede producir su potencia máxima. Como las condiciones de operación del torque y la velocidad dependen del punto optimo, la eficiencia decae a lo largo de la curva parabólica. Note que para una constante de motor grande, el punto optimo se mueve en valores que se encuentran arriba de la velocidad mínima, desde el punto en que la velocidad máxima decrece para un voltaje de armadura fijo. Los motores de acoplamiento directo son generalmente operados en bajas velocidades, y en consecuencia una constante de motor grande es deseada para poder mejorar la eficiencia.
37

w a:,
.... l&.I ~ o a: o ~
w"• l/2wmaa Wmaa
ANGULAR VELOCITY w
Figura 3-1 Características de torque velocidad y potencia vs velocidad para un motor de f:D

3.2.4 LA CONSTANTE DE TIEMPO ELÉCTRICA
A continuación consideraremos el rendimiento dinámico, particularmente la respuesta del torque de salida a un cambio repentino en el voltaje de armadura V, de la Ec (3.3) y (3.6), la transformada de Laplace del torque del motor es
i(s) = [ ~V(s)- K.,Cl(s)] / 1 + T.s (3.12)
donde T. esta referida como la constante de tiempo eléctrica y esta dada por
L T.= R (3.13)
La constante de tiempo eléctrica es comúnmente pequel'ia para la mayoría de los motores de CD , pero esto no sucede para motores de torque de acoplamiento directo. Para generar un torque grande, el motor de acoplamiento directo necesita un diámetro de rotor grande y un gran devanado, lo cual produce indudablemente una gran inductancia.
Esto tiene una importancia especial para el sistema de transmisión del motor lo cual se enfrenta con el efecto significante de una constante de tiempo eléctrica de un gran valor así que el sistema de control puede ser estable.
3.3 MOTORES DE TORQUE DE C.D. SIN ESCOBILLAS
3.3.1 PRINCIPIO
Los motores de torque de CD, investigados en la sección previa, tienen muchas ventajas incluyendo una alta eficiencia, bajo torque de reacción, características lineales de torque-velocidad y son relativamente simples en su fabricación.
La mayor desventaja del motor de torque de CD es que grandes corrientes son transmitidas al rotor atreves de la conmutación mecánica. En las escobillas y conmutador, grandes chisporroteos son creados debido a la gran inductancia del devanado del rotor así como a la gran corriente y alto voltaje aplicado al devanado del rotor. El chisporroteo excesivo causa un desgaste rápido en las escobillas. Este chisporroteo también produce un ruido no deseado, lo cual es dal'iino a los otros dispositivos eléctricos. El mecanismo de escobillas incrementa la fricción mecánica, lo cual degrada el rendimiento del control.
39

Los brazos de acoplamiento directo del ITM y otros robots comercializados emplearón motores de torque de CD sin escobillas. En los motores sin escobillas, la conmutación mecánica es reemplazada por circuitos interruptores eléctricos, así que el mecanismo de escobillas puede ser eliminado. Ningún chisporroteo es producido, mientras que las características de los motores de CD convencionales son preservadas. La eficiencia es tan alta como la de los motores de CD convencionales y las características torque-velocidad son lineales en un amplio rango de velocidades.
La diferencia de los motores de CD convencionales, es que el rotor del motor sin escobillas consiste de imanes permanentes, mientras que el estator consiste de devanados como se muestra en la fig. 3.2. Por lo tanto el rotor y el estator están intercambiados. La conmutación de la corriente es realizada en función de la posición del rotor usando un sensor de posición. En relación con la posición del rotor, las corrientes son transmitidas al devanado correspondiente a través de circuitos de interrupción electrónicos.
Como se menciono en las secciones previas, los motores de torque de CD convencionales tienen muchas bobinas y el mismo número de segmentos en el conmutador, así que la disturbancia en el torque puede ser suprimida. Si, en el motor sin escobillas, un interruptor electrónico es usado para cada bobina, el amplificador de transmisión llega a ser complejo y costoso, ya que tiene interruptores de transistores y esto es lo que lo hace caro. Por lo tanto, el número de interruptores es minimizado en el motor sin escobillas, si una construcción común de los devanados como para un motor de tres fases, como se muestra en la fig. 3-3. Esta construcción de los devanados requiere solo interruptores independientes, cada uno de ellos es para conducir una corriente dentro del devanado en localizaciones apropiadas del rotor.
Un problema con este diseño de motor es que el torque puede cambiar discontinuamente cuando los interruptores son accionados a las posiciones activado y desactivado cuando la posición del rotor cambia. Para reducir la disturbancia en el torque, el flujo de corriente dentro de cada devanado es variado continuamente con el movimiento del rotor.
Dejemos ser L,/6e /<corrientes individuales fluyendo dentro de los devanados
de las tres fases. Las corrientes varían de la siguiente forma:
40

"' -
PERMANENT MAGNET
(a) Conventional OC motor
ROTOR
PERMANENT MAGNET
( b) Brushless OC motor
Figura 3-2 Construcción Convencional de un Motor de CD con y sin Escobillas

ref1r111Ce input ,-.. , read anlr -·
multiplrino DIA con verter
Wave
Pulse Wodtll
modulotor
'"'"' .....
rualver ta
dl9ital converltr
rotor
Figura 3-3 Sistema de Control para un Motor de CD sin Escobillas
112

(3.14)
donde E),.,, representa la posición del rotor e /0
/0
J.'o es la corriente del motor.
El torque producido por el motor esta dado por
(3.15)
El primer termino cuenta para la contribución del devanado de la fase A, y los términos segundo y tercero son para los devanados de la fase B y C, respectivamente. El torque del motor T es entonces obtenido sustituyendo la ecuación (3.14) dentro de la ecuación (3.15) y resulta lo sig:
(3.16)
La ecuación de arriba indica una relación lineal entre el torque de salida y la corriente del motor. En la practica, esta relación pudiera no ser lineal. Las características torque-corriente de un motor sin escobillas son virtualmente las mismas que las del motor de CD. Específicamente, la constante de torque y la constante del motor pueden ser definidas en la misma forma como fue discutido previamente. Otra característica del motor de CD sin escobillas es su efectiva disipación de calor. Esto es por que los devanados están montados sobre el estator el cual esta en contacto con la carcaza del motor a través de una gran área.
3.3.2 MOTORES COMERCIALIZADOS
La foto 3-2 muestra motores de torque de CD sin escobillas desarrollados por lntemational Scientific lnc.; el mismo tipo de motores como los usados por los robots de acoplamiento directo del ITM. Los imanes permanentes cementados sobre los anillos del rotor son imanes de alto rendimiento de Cobalto-Samario, la cual tienen una energía de magnetismo máxima de más de 26 MGOe. Este imán de tierra rara almacena de 3 a 10 veces mayor energía magnética que los imanes convencionales, como imanes de ferrita y AINiCo.

Foto 3-2 Motores de Torque de CD sin Escobillas
44

La tabla 3-1 muestra especificaciones del motor sin escobillas más grande que existe tomado del catalogo del fabricante. El máximo torque del motor es 660 Nwm, el cual es en orden de magnitud tan grande como los motores de CD convencionales del mismo tamal'lo. La eliminación de las escobillas permite proporcionar grandes corrientes a los devanados, y el gran magnetismo produce una gran densidad de flujo. Desde que el flujo magnético es atenuado por los flujos de corrientes en los devanados del estator, el torque máximo listado en el catálogo debe de estar decrementado. A pesar de esto, este tipo de motor produce el mayor torque entre los tres diferentes tipos de motores de acoplamiento directo.
Una variedad de técnicas han sido observadas para reducir el torque de reacción. En la misma forma como los motores de CD convencionales, el número de polos es incrementado en el diseno del rotor. Como se muestra en la tabla 3-1, el motor sin escobillas de 356 mm tiene 30 polos. Incrementando el numero de ranuras en el estator es también efectivo para la suavidad del torque.
Otra técnica para reducir el torque de reacción es el arreglo de los polos del rotor y la posición de los polos en el estator. Si todos estos polos en el rotor y en el estator están alineados en la misma posición del rotor (iso-periódico), el torque de reacción resultante puede llegar a ser un factor importante. Para evitar esto, el número de polos en el rotor es hecho ligeramente diferente que los del estator. Los motores de torque de CD sin escobillas de la foto 3-2 emplea esta técnica para reducir el torque de reacción.
Los devanados de tres fases han sido escogidos para la mayoría de los motores sin escobillas, principalmente por que el costo de los interruptores de transistores es minimizado. Sí, el número de fases es incrementado para cinco o para siete, esto es efectivo para reducir el torque de reacciér.. Todavía est9 méto::lo no ha sido adoptado.
ITEM Diámetro del estator (D) Longitud del estator Torque máximo Constante del motor Constante de tiempo eléctrica (Te) Peso
TAMAÑO 356mm 66mm 660Nw-m 7.5 Nw-m/W 10ms 12 Kg
Tabla 3-1: Especificaciones de un motor de CD sin escobillas
45

3.4 MOTORES DE RELUCTANCIA VARIABLE
3.4.1 PRINCIPIO
Otro tipo de motores de alto torque y baja velocidad usados para robots de acoplamiento directo son los motores de reluctancia variable. El principio del motor de reluctancia variable es similar al del motor a pasos, como se muestra en la fig. 34. El estator tiene un devanado el cual creá un flujo que pasa a través del estator y los dientes del rotor, los cuales están hechos de una sustancia magnetica. El rotor está en una posición estable cuando el diente del rotor y el estator están alineados, como se muestra en la fig. 3-4(a). Una fuerza es generada con la variación de la posición del rotor a partir de la posición estable; La fig. 3-4(b). La fig. 3-4(c) muestra la relación entre la fuerza f y el desplazamiento 0.
La fig. 3-5 muestra una estructura extendida del motor de la fig. 3-4. El estator tiene 3 devanados (3 fases); 'Á, (AY 'Pi. Note que el paso de los dientes del rotor
es diferente que los del estator.
El motor de esté tipo es llamado como un motor a pasos de reluctancia variable. El motor tiene algunas ventajas en comparación con otros tipos de motores. De cualquier forma para aplicar motores de reluctancia variable a robots de acoplamiento directo, los siguientes puntos deben de ser observados:
1. -Cuándo se logra una gran velocidad o gran aceleración, el movimiento del rotor puede estar fuera de fase con la excitación del estator.
2. -Las fluctuaciones en el torque son grandes.
3. -La posición del rotor es estable solo cuando los dientes del rotor están alineados con los del estator.
4. -La relación de peso contra torque de salida tiende a ser más alta que la de los otros motores.
Para solucionar los tres primeros problemas, se utiliza un control de corriente de lazo cerrado que utiliza un sensor de posición de rotor, con la información de la posición del rotor, la excitación de cada devanado de fase puede ser ajustada correctamente para que no ocurra un movimiento fuera de fase.
46

- -, r -
®l J c;rWind1 I -I
ngs ® I
j 1 /Rotor .J_ Restoring Force
- -
(a) Stable position 9•0 (b)9=8,
f
( c ) Force vs. posi tion
Figura 3-11 Fuerzas Producidas en Motores de Reluctancia Variable

• CD
Stator
::;:;::i::::;:;:;¡;:,;,':it:::i:1:8::::;tt:::;:)Kllfülíi:ttt@m:me11r2~;t:m:;;1n111:@;flliB Rotor
(a) ConfiQuration
~ 1 '\ 1 " - 1 '- I \ - ¡\ 1, . I "t "11 /1 I\ " 11 __, I \ / \ I \ 1 \ / 1 / 1 _I • 1 I I
O o 1 1 / \ 1 I • ~ • · • 1 •
Q: I 'r' \I ,,' ', • , '/ " '/ ',' \t r' •/ Q I A I' ,i ,( I I~ ' 11 A I 1 1• 1-- ', ,, ,, ,, ,, ,, ,, ,, ,, /1 ,, ,'
,' ', ,' \ ,' " , ' ,' '. ,' \ ,' \ ,' ,' \ ,' \ ,' \ ,' \
U ~ ~ ~ u ~ J U V ~ ~
(b) Torque 9enerated
Figura 3-5 Principio del motor a pasos de Reluctancia Variable

3.4.2 MOTORES COMERCIALES
Métodos eficientes para incrementar el torque de salida son el reducir la distancia del entre-hierro y el incrementar el número de dientes. La foto 3-3 muestra el motor de acoplamiento directo de reluctancia variable desarrollado por Motornetics Co., el cual emplea la construcción de aumentar el número de dientes. El número de dientes es de 150 para el rotor y 144 para el estator. El motor consiste de un motor y dos estatores; el estator interno y el estator externo como se muestra en la fig. ~- Está construcción especial fuá dise"ada para obtener el torque de transmisión en ambos lados del motor. En consecuencia, el número de dientes se ha incrementado al doble en comparación al de un estator sencillo.
Cada estator tiene 1 B polos, y 6 segmentos de bobinas están conectadas en serie. Como se muestra en la figura, los devanados tienen un arreglo para que el flujo pase a través del rotor con una dirección radial. Esta construcción permite al motor reducir perdidas internas de energía magnética, y dá como resultado un valor de constante de motor grande.
La tabla 3-2 muestra especificaciones de un motor de acoplamiento directo de reluctancia variable de 356 mm (14 pulgadas) de tama"o desarrollado por Motornetics. Note que la constante de motor es más grande que la del motor de C.D. sin escobillas de la tabla 3-1. El torque máximo , es aproximadamente de una y media veces que el desarrollado por el motor de C.D. sin escobillas que tiene el mismo tama"º· Por otro lado, la continuidad del torque es mayor en el motor de reluctancia variable ya que la potencia disipadad en este tipo de motor es menor que la del motor de C.D. sin escobillas.
Los motores de reluctancia variable, en general, tienen características de mayor inestabilidad en el torque y características no-lineales de torque-velocidad. Compensaciónes para estás no-linealidades son criticsa para sus aplicaciones en robots de acoplamiento directo.
ltem Diámetro del Estator (D) Longitud del Estator (L) Torque Máximo Constante del Motor Inductancia de la Bobina Resistencia de la Bobina Peso
Tama"o 356mm 102mm 250nw-m 23.2Nw-n/.JW 150 inH 3.50 60Kg
Tabla 3-2: Especificaciones del motor MEGATORQUE
49

u, CI
Foto 3-3 Motor MEGATORQUE de Motornetics

I nner stotor
Figura 3-6 Construcción del Motor MEGATORQUE
u, -

3.5 CARACTERISTICAS EN EL DISEAO Y CONTROL DEL BRAZO
Características fundamentales de los componentes involucrados en un sistema de acoplamiento directo fuerón analizados en las secciones previas. Ahora discutiremos las características criticas en el disñe y el control de sistemas de acoplamiento directo. El sistema de acoplamiento directo tiene varios problemas que hacen que la aplicacion de la transmision del motor sea dificil. Para poder aprovechar las características potenciales descritas en el capitulo 1, nosotros necesitamos identificar los problemas críticos para que la aplicación sea exitosa.
3.5.1 CAPACIDAD DE CARGA VS PESO DEL BRAZO
Como se comento anteriormente, la primera implementación de acoplamiento directo en robots en la Universidad de Camegie-Mellon resulto con un gran peso del brazo y una capacidad de carga pequel'la.Teniendo motores individiales en las uniones de las articulaciones del brazo serial , los robots llegan a ser considerablemente pesados. El peso del motor que se utiliza en una unión de una mul'leca de un brazo es una carga para el motor del codo del brazo. Ambos motores son entonces carga para el motor de la unión del hombro. Por lo tanto, el torque requerido para cada unión que se incremente en una estructura serial de un robot debe de ser exponencialmente grande. De acuerdo a esto el tamaño y el peso del motor se incrementa exponencialmente.
Un diseño · alternativo de un brazo para evitar que el peso se incremente exponencialmente, es el que utilizo el ITM el cual los motores están a una cierta distancia de la unión, es decir el motor esta localizado sobre la base del brazo y la transmisión se realiza remotamente. Una característica crítica de las transmisiones remotas es el costo, ya que la transmisión utiliza algunos mecanismos extras lo que lo hace más costoso.
3.5.2 RIGIDEZ DEL SISTEMA SERVO
Un brazo manipulador esta sujeto a una gran variedad de fuerzas disturbantes particularmente al final del brazo. La habilidad para transmitir una fuerza disturbante estática es frecuentemente evaluada en terminos de rigidez al final del brazo, esto es, la relación de la fuerza estática aplicada en el punto final del brazo y la deflección estática resultante en el mismo punto .. La máxima rigidez al final del brazo se traduce como lo mejor que puede suceder ya que se traduce como mantener una carga y mantener la presición de la posición.
52

La rigidez al . final del brazo esta determinada por la ganancia de la retroalimentación de lazo cerrado del servomecanismo de cada unión también influye la construcción mecánica del brazo manipulador. Para un robot de transmisión de engranes, la ganancia del lazo cerrado se incrementa en función de la relación del reductor, rz. así que el torque de salida del motor es
amplificado por el reductor de engranes. El robot de acoplamiento directo , no puede tomar esta ventaja que proporciona el reductor de engranes; esto no significa que se tenga que amplificar el torque mecánico del actuador . En consecuencia, el robot de acoplamiento directo necesita una ganancia en el control de gran tamano para compensar el deficit de la ganancia de el lazo cerrado.. Nuevamente se hace resaltar que la característica crítica es la estabilidad del sistema de transmisión.
3.5.3 EFECTOS DE LA INDUCTANCIA DEL MOTOR
Los motores de acoplamiento directo para aplicaciones en róbotica son generalmente diser'\ados para torques de salida máximos. Para eliminar un sistema de engranes, la más importante especificación en el diseno de un motor es poder obtener un gran torque de salida. Este requerimiento se traduce en necesariamente utilizar devanados de gran tamano, lo cual genera una gran inductancia. Como se describe en la Ec. (3. 13), la constante de tiempo eléctrica, la cual esta determinada por la inductancia del motor, llega a obtener un valor minimo para un motor de acoplamiento directo de gran tamano. El valor mínimo de la constante de tiempo pudiera causar problemas de estabilidad.
Para los servomotores tradicionales utilizados en robots que utilizan engranes de transmisión, la inductancia del motor es mínima. flor lo tanto, el efecto de la constante de tiempo eléctrica es nula, y el sistema de transmisión puede ser tratado con un sistema de segundo orden. Por lo tanto, el sistema de transmisón es inherentemente estable con un apropiado amortiguamiento. En contraste, el sistema de acoplamiento directo puede puede ser inestable debido al efecto de inductancia del motor, para combatir con este problema, el amplificador del motor de acoplamiento directo debe de tener una répida respuesta dinámica para que la corriente fluya rápido en los devanados del motor. También, el sistema de control debe ser diser'\ado cuidadosamente para que el margen de estabilidad pueda ser suficientemente amplio.
53

3.5.4 EFECTOS DINÁMICOS EN EL BRAZO
En general, el comportamiento dinámico de un brazo manipulador es no-lineal. La inercia del brazo varía dependiendo de la configuración del brazo. La aceleración de una unión afecta otras uniones debido a la reacción de la unión que aceleró.Esté reacción causa acoplamiento entre las multiples uniones.
Cuando el brazo manipulador es actuado con un reductor, el efecto dinámico del brazo es atenuado por los engranes del reductor, consideremos n.. como la
relación de reducción del reductor de velocidad del "' mecanismo de transmisión,
entonces la ecuación dinámica del "' motor esta dada por
(3.17)
donde ,_ es el torque producido por el motor, y ,..,.., y ,_ . son,
respectivamente, los torques de acoplamiento y no-lineales, los cuales son atenuados por el factor de n y realmente donde se refleja es en la flecha del motor. El primer termino de la ecuación de arriva para el torque inercial asociado con la aceleración del actuador, a. El momento de inercia esta incluido en la inercia del rotor del motor J ,,,,, incluyendo la inercia del reductor, y la inercia de la articulación del brazo J .... la cual es reducida por el cuadrado de la relacion del reductor n. el cual es reflejado en el eje del rotor. Esto debera de ser notado ya que la inercia de la unión del eslabón varía dependiendo de la configuración del brazo, mientras que la inercia del rotor es invariante. El efecto de la variación de la inercia causa poco efecto sobre la dinámica del motor, si la relación n del reductor es suficientemente grande. Los parametros del sistema pueden ser modelados como constantes para el brazo del manipulador.
El brazo de acoplamiento directo, es significativamente diferente del robot que utiliza acoplamiento de un reductor. La compleja dinámica del brazo esta directamente reflejada a la flecha del motor debido al acoplamiento directo. El efecto de la variación de la inercia también influyen en el acoplamiento y los torques no-lineales son més prominentes para el robot de acoplamiento directo. Esto creé problemas en el diseno del sistema de control. Debe de obtener respuestas estables y ganancias suficientemente altas. Consideramos la otra dificultad discutida, nosotros necesitamos desarrollar un método eficiente para desacoplar el brazo ya que esto generé problemas de control en los actuadores individuales.
54

3.5.5 SOBRECALENTAMIENTO
Cuando un brazo manipulador esta en reposo, el peso de las articulaciones es una carga para cada unión. Para el robot que tiene en la transmisión acoplamiento de un reductor, la carga de la gravedad esta atenuada por el reductor de engranes por el factor n, como se muestra en la eciación (3.17). El
mecanismo de engranes introduce fricción, el cual actua en una dirección opuesta del movimiento de la unión. Como resultado, la carga de la gravedad puede ser producida en parte por la fricción en los engranes.
Como los engranajes son eliminados en el robot de acoplamiento directo, la carga de la gravedad debe de ser producida directamente por el motor. Esto requiere que el motor produzca una gran torque continuó a lo largo del tiempo de operación. Otra critica característica del robot de acoplamiento directo es el problema de sobrecalentamiento que experimenta cuando trabaja sobre condiciones de una carga continua. Eficientes tecnicas de disel'lo de brazos y tecnologias de motores deben de ser desarrolladas para evitar el sobrecalentamiento de los motores.
3.5.6 CARACTERfSTICAS DE AMORTIGUAMIENTO
Los sistemas de acoplamiento directo tienen casi cero amortiguamiento, lo cual puede causar serios problemas en el diseno del sistema de control. El amortiguamiento mecánico es producido en los baleros que soportan las flechas de las uniones. La constante de tiempo mecánica, la cual esta determinada por la relación de la carga inercial con el coeficiente de amortiguamiento mecánico, es excesivamente grande comparada con los sistemas que utilizan reductores de velocidad. La fuerza contraelectromotriz del motor produce un efecto de amortiguamiento, porque el voltaje aplicado al motor es substancialmente reducido por la fuerza contraelectromotriz , lo cual esta en proporción con la velocidad del motor. Este efecto de amortiguamiento electromecánico es por lo menos una cantidad necasaria de amortiguamiento para estabilizar la respuesta del sistema. En consecuencia, nosotros necesitamos incrementar · el amortiguamiento en el disel'lo del sistema de control.
La compensación de retroalimentación de velocidad es directamente aprovechada para mejorar las características de amortiguamiento. Como se muestra en la ecuación (3.11 ), el coeficiente de amortiguamiento se incrementa por una cantidad k uk, IR con retroalimentación de velocidad. Los disel'los del sistema de
control de la U.C.M. y ITM revelan que uno debe de escoger la ganancia de retroalimentación de velocidad k u debe de ser un valor considerablemente grande
para obtener respuestas satisfactorias. La medición de la presición de la
55

velocidad con un nivel de ruido bajo es entonces necesario para facilitar esa alta ganancia de retralimentación de velocidad. La medida de velocidad para el robot de acoplamiento directo es más difil que en los robots que utilizan reductores de velocidad. Esto es porque la velocidad del motor de acoplamiento directo es tan baja como el movimiento de la articulación movil, mientras que la velocidad del motor que utiliza reductor de velocidad es mucho más rapída que la articulación del brazo, por lo tanto es fácil medir la velocidad. Como resultado, nosotros necesitamos un apropiado sensor de alto rendimiento para mediciones a baja velocidad.
56

CAPITUL04
ESTÁTICA
4.1 INTRODUCCIÓN
En este capitulo, nosotros nos enfocaremos en las características estéticas de los manipuladores. Específicamente, nosotros consideraremos un manipulador, tal como el que se muestra en la fig. 4-1, donde n actuadores son usados para transmitir movimiento a las articulaciones del brazo. Cada actuador produce un torque -r el cual esta combinado con otros torques del motor a través del mecanismo de articulaciones para generar una fuerza F al extremo de la articulación, que es realmente el que ejecuta el trabajo. La habilidad para producir una fuerza F sin sobrecalentamiento de los actuadores es de gran importancia en el disel'lo de los brazos de acoplamiento directo. En relación al estudio de estés características, el sistema consiste de un mecanismo de transmisión y las articulaciones del brazo deben de ser consideradas. A continuación una herramienta analítica es presentada para evaluación de mecanismos en términos de disipación de potencia en los actuadores y las fuerzas generadas en el extremo final del brazo.. Esto es particularmente importante en la evaluación de sobrecalentamiento en actuadores de acoplamiento directo sobre condiciones de carga estática. Dos diferentes mecanismos son seleccionados y comparados para usar en un actuador de acoplamiento directo.
4.2 ANÁLISIS DE EFICIENCIA DE POTENCIA
Uno de los problemas de la propuesta de acoplamiento directo es que el motor no puede producir una gran fuerza. Porque se acoplan directamente los motores y la carga, los torques de salida de los motores no son amplificados con reductores de velocidad. En consecuencia, los motores tienen que llevar la carga directamente, y pueden sobrecalentarse, sobretodo en condiciones criticas. En esta sección, nosotros analizamos la disipación de potencia en los motores cuando una fuerza es generada en la punta del brazo.
Un importante parámetro de los motores de torque es que la constante del motor que esta dada en la ecuación (3.8). Esto es la relación del torque de salida t y la raíz cuadrada de la potencia disipada P en el motor,
57

t
input joint i
-€-·
.J:-· world coordilla&es
Figura 11-1 Manipulador de un Robot
sa

r k.= .fp (4.1)
La constante del motor representa la eficiencia con la cual el motor convierte la potencia de entrada y el torque de salida. Si k. es peque"ª· el motor disipa una gran cantidad de potencia lo cual genera que el torque sea peque"º·
Cuando un robot lleva una carga en el extremo de un brazo, la carga es distribuida entre todos los motores del mecanismo del brazo. En adición a las características del motor, la eficiencia de una fuerza producida en el extremo del brazo también depende de la estructura cinemática del mecanismo del brazo. Consideremos F la fuerza producida en el extremo final del brazo representado en coordenadas cartesianas, y consideremos t el vector que representa los torque de n motores, entonces obtenemos
(4.2)
donde J es la matriz jacobina asociada con la transformación de coordenadas de las coordenadas de las uniones y las coordenadas cartesianas del extremo del brazo manipulador.
Consideremos a P la potencia total disipada en los n motores de transmisión del mecanismo del brazo y k .. la constante del iesimo motor, entonces la potencia total disipada P esta dada por la siguiente forma cuadratica ,
• 2
P= r..-+= F LF (4.3) i=I k,,.
donde L esta dado por
L = Jdia8(-;.-, ... ,~) f k.. k ...
(4.4)
por lo tanto la potencia disipada depende no solo de la estructura cinemática, si no también de las constantes de los motores de los actuadores.
La relación dada por la ecuación (4.4) es una transformación congruente y la matriz L es positiva asf como la matriz Jacobina es no-singular, por lo tanto, la matriz L es toda real y los eigenvalores positivos, A. > o, y la forma cuadratica puede ser reescrita como
(4.5)
59

donde F, es la componente de la fuerza en el punto final del brazo a lo largo del correspondiente eigenvector A.· La interpretación geométrica de la ecuación (4.3) es obtenida descomponiendo la potencia total P. En este caso, la forma cuadratica de la ecuación (3.3) es la elipse que se muestra en la fig. 4-2,. Los ejes principales de la elipse están alineados con el eigenvector de la matriz L, y la longitud de cada eje principal es igual al reciproco de la raíz cuadrada del eigenvalor correspondiente. Las características estáticas dependerán de la configuración del brazo desde el más pequeno eigenvalor de L que corresponde al eje mayor o menor de la elipse, y de la fuerza máxima o mínima que actúa a lo largo del eje mayor o menor. Por lo tanto a lo largo del eje mayor, la potencia de entrada es más efectivamente convertida a fuerza en el extremo del brazo. Ya que la matriz L involucra la matriz jacobina J, la cual varía con la configuración del brazo. Examinando la elipse para diferentes configuraciones del brazo, uno puede analizar las características globales de la conversión de potencia a fuerza.
Para evaluar la eficiencia total de la combinación brazo-motor, nosotros definimos el significado de la relación de disipación de potencia, J •. lo cual representa los eigenvalores y esta dado por
(4.6)
Las unidades de J. son Watts por Newton cuadrado.
4.3 DISEAO DE UNA ESTRUCTURA CINEMÁTICA
4.3.1 MECANISMO DE TRANSMISIÓN PARALELO
En relación de la estructura cinemática apropiada para un brazo de acoplamiento directo, nosotros consideramos las siguientes estructuras básicas: un mecanismo de transmisión serial simple, como se muestra en la fig. 4-3; y un mecanismo de transmisión paralelo de cinco articulaciones, como se muestra en la figura ~.
En esta sección definimos estos dos métodos de sistemas de transmisión: transmisión serial y transmisión paralelo. La figura 4-3 muestra la construcción típica de un mecanismo de un brazo de transmisión serial, en la cual la articulación inferior es movida por un motor fijado en la base y la articulación superior es movida por un motor próximo al extremo de la articulación inferior. En esta configuración serial, el
60

• (J ~
• ~ e (J
~ ~ o e - ·-e e
:,
ill ~
4ll E .. en ,e ·; o
e o \ ~ .. \ o
111 • \ e ftl ,i N ' E 1,. o GI \ ::, ~ \ u. o
\ GI
-¡; 'ti e GI 111
.9-w
N 1 ~
ftl 1,. ::, en ¡¡:
' \ \
61

motor 2
motor l
Figura 4-3 Mecanismo de un Brazo de Transmisión Serial de 2 GOL
62

peso del segundo motor es una carga para el primer motor. Sin embargo el torque de reacción del segundo motor actúa sobre el primer motor.
Cuando el segundo motor acelera, un torquimetro actúa sobre el primer motor y viceversa. Por lo tanto ambos motores tienen una significante interacción.
La figura 4-4 muestra una construcción alternativa de un brazo consistiendo de un mecanismo de cinco articulaciones. Dos motores fijados en la base mueven a dos articulaciones y causan un movimiento de dos dimensiones en el extremo del brazo. El peso de uno de los motores no es una carga para el otro. También el torque de reacción de uno de los motores no actúa directamente sobre el otro, por que los motores están fijados en la base. Un mecanismo de un brazo en la cual los motores están montados sobre una base y el peso y el torque de reacción de uno de los motores no afecta a los otros motores directamente son llamados como un mecanismo de transmisión paralelo. El mecanismo de transmisión paralelo ha sido usado en varios modelos de robots comerciales que tienen transmisiones electromecánicas convencionales con engranes. El mecanismo de cinco articulaciones, como sea, es particularmente útil para vencer las dificultades inherentes de los métodos de acoplamiento directo.
4.3.2 IDENTIFICACIÓN DE LA CONSTANTE DEL MOTOR
En relación de utilizar los análisis de la seccione previa, la constante del motor, k,,., tiene que ser determinada. El siguiente experimento fue conducido para identificar la constante del motor de una unión activa sencilla. Primero, un sistema de control de .posición es colocado para permitir una posición arbitraría del rotor del motor usando una terminal de computadora. Este sistema de control de posición es necesario por que la relaciones derivadas de las sección previa son validas en condiciones estables. Segundo, conocida la carga que estuvo siendo aplicada a la flecha del motor, la posición y la potencia disipada por el sistema fue calculada usando las corrientes de fase en el motor. Estás corrientes de fase son un error debido a las limitaciones del sensor y deben de ser corregidas. La figura 4-5 proporciona una gráfica de los dato experimentales. La raíz cuadrada de la medida de la potencia contra el torque aplicado.
4.3.3 EVALUACIÓN DE LA ESTRUCTURA CINEMÁTICA
La fuerza en el punto final para el mecanismo de transmisión serial en comparación con el mecanismo de transmisión paralelo de la figura 4-6 es evaluado. Para el mecanismo de transmisión de cinco articulaciones en paralelo, la matriz L esta dada por
63

a, .,=
link :i
joint 2
motor 2
6
link 4 (011tput link)
link 1 (input link)
joint 1
motor 1
base
Figura 4-4 Mecanismo General de Articulaciones tipo Barras

en u,
30.0--~~~~~~~~~~~~~~~~~~-
Least Square Fit v'Ps0.4227 T-1.3415
~ 20.0
~ 10.0
o.o ..... ~--.__~--.__~~--~~....__~~---~--o.o 20.0 40.0 60.0
TORQUE (NEWTON-METER)
Figura 11-5 Constante del Motor

JOlnt 3
Jo1nt 1 and 2
base
link 4
Figura 4-6 Mecanismo de Transmisión Paralelo de 2 GDL
66

donde
L ¡: 2L) t. 2L)
11 = -k2 sen 1J1 + k2 sen vii .. 1 or2
L = L = _ ..t.__ sen Ll cos Ll - 1: sen Ll cos Ll 12 21 k2 IJI IJI k2 V'J V'J
•I or2
donde la fuerza F en el punto final es representado en el sistema de coordenadas fijado en la base como se muestra en la figura 4~.
La figura 4-7 ilustra las características de la fuerza estática, ecuación (4.3), para la configuración paralelo. La máxima fuerza producida a lo largo del eje mayor de la elipse en la punta del brazo. Note que en esta configuración paralelo que la fuerza parece estar más cerca isotópicamente en una región ancha. La fuerza máxima basada en la potencia total de 1 Kw esta estimada en 190 Newtons. Este valor es obtenido tomando la raíz cuadrada de la relación de la potencia y el eigenvalor mlnimo.
La relación de la disipación de la potencia media esta dada por
1 /2 /2 1 =-(-1 +-4)
A,. 2 k2 k2 "'' •2
(4.7)
La matriz L varia dependiendo de la configuración del brazo, la disipación de potencia .,t,. es uniforme para todas las configuraciones. Para las longitudes más cortas de las articulaciones, /
1 y /
4 y para las constantes de motor más grandes, k ..
1
y k.a• la combinación motor-brazo tiene una mejor eficiencia si la relación de la potencia de disipación es pequei,a.
Comparemos el mecanismo de transmisión paralelo con el de transmisión serial en términos del valor de .,t,.. La relación de la disipación de potencia del mecanismo de transmisión serial de la figura 4-3 es
67

2 2 /2 l 1 =.!.(Á.+_k_+-4 )--1 / coslJ
.11,,. 2 k2 k2 k2 k2 4 (72 ... ,w2 •• ••
(4.8)
En este caso, ,i. varia dependiendo de la configuración del brazo. Cuando Q se incrementa ,i,.llega a crecer, logrando que la eficiencia llegue a ser baja. Comparando la ecuación (4.7) con la ecuación (4.8), uno encuentra que la transmisión paralelo tiene menor disipación de potencia que la transmisión serial, excepto cuando
(4.9)
Las curvas de la potencia se muestran en la figura 4-8.
En el caso del robot de acoplamiento directo del I.T.M Modal II descrito en la figura 4-6, las longitudes de las articulaciones, /
1 y /4 , son 0.40 m y 0.65 m
respectivamente y el ángulo de la unión 2 esta limitado por 35º:!> Q :!> 170º. El mecanismo de transmisión paralelo tiene una mejor eficiencia para todas las configuraciones del brazo, dentro del limite. Esta es otra importante ventaja del mecanismo de transmisión paralelo sobre el de transmisión serial. Teniendo las mismas constantes del motor y las mismas longitudes de articulaciones a través del mismo espacio de trabajo, el mecanismo de transmisión paralelo puede producir más eficientemente una fuerza en el extremo del brazo.
Vamos a considerar el mismo mecanismo, donde las articulaciones están cruzadas, esto produce completamente características cinemáticas diferentes. Esta configuración de transmisión cruzada (modo 11) representada en la figura 4-9, muestra un cambio completo en las caracterlsticas de las fuerzas estáticas. La fuerza es reducida a una línea en la elipse en la región alcanzable. La relación entre la fuerza máxima y la mlnima en cualquier punto del espacio es más grande que 11. Este valor esta en el orden de 1.6 para el Modo I de transmisión paralelo. La configuración del Modo II de este mecanismo puede ser usada en aplicaciones donde una gran fuerza es necesaria a lo largo de la dirección mostrada en la figura 4-9. Esta fuerza, mientras tenga una dirección deseada, es mucho más grande que la del mecanismo del Modo I pueda producir. La carga máxima basada en la potencia de 1 KW es 33 Kg. Los modelos II y IV de los robots de acoplamiento directo del I.T.M: tienen la habilidad de cambiar modos. El robot de acoplamiento directo modelo IV es mostrado en estos dos diferentes modos en las fotos 4-1 y 4-2.
68

--Figura 11-7 Características de la Fuerza Estática
69

.... o
.2 10.122 nrial drin
4.1 .. -~--l" __ z .I~ .. -; • 1 &. ..e o.o,u ~ parallel drive
:¡ I0.0388 ti ::E
o 12 Des 180
Figura 11-8 Relación de la Disipación de la Potencia para Transmisiones series y paralelas

4.4 CONCLUSIONES
Este capitulo ha presentado una herramienta analítica para evaluar los mecanismos en términos de disipación de potencia y características de las fuerzas estáticas en el extremo del brazo. Estás herramientas están mostrando ser útiles en la selección del diseño de las articulaciones del brazo para una aplicación especifica. Como un ejemplo, analizando la potencia de disipación interna en los motores cuando el manipulador produce una fuerza en extremo del brazo. Esto mostró que el mecanismo de transmisión paralelo tiene una potencia de disipación menor que la de transmisión serial utilizando los mismos motores y que cubren el mismo espacio de trabajo.
71

:.¿ ' 1 • - .
~~
\\'
Cruzalllas ' configu,adone, ' E,,.Hca P"' . de la Fuerza -9 Características Flgu,a • 72

Foto 4-1 Robot de Acoplamiento Directo del ITM modelo IV en moda de Transmisión paralelo
73

• " • ••
Foto 4-2 Robot de Acoplamiento Directo del ITM Modelo IV en modo de Transmisión Cruzada
711

CONCLUSIONES
Es indudable el hecho de que el actuador eléctrico que es utilizado en un manipulador tiene actualmente las mayores ventajas debido a su precisión, tamaño y capacidad de carga.
Considerando el actuador eléctrico como el més apropiado no nada més debido a las ventajas antes mencionadas si no que también pueden ser utilizados en cualquier tipo de estructura como las que se mencionan en este trabajo.
Aunque los motores de acoplamiento directo tienen un tiempo relativamente corto que se empezaron a desarrollar, es indudable que pueden desplazar a la transmisión electromecánica (ensamble motorreductor), ya que sus características como el cero arrastre, cero fricción, capacidad de carga considerable, tamaño pequeño y gran precisión son de gran ayuda en el manipulador.
Otra gran ventaja de los motores de acoplamiento directo comparado con los sistemas de transmisión electromecánica es la rápida respuesta dinámica, que adicionada a las otras ventajas ya mencionadas hacen que el control del manipulador tenga un gran rendimiento.
En cuanto al diseño de los motores de acoplamiento directo, se identifico como parte primordial para obtener grandes torques el érea del entrehierro y el diámetro del rotor, estés dos caracteristicas son directamente proporcionales al torque del motor.
También cabe recalcar la importancia de la constante del motor, constante de torque y la constante de tiempo eléctrica como unas de las més importantes especificaciones del motor de acoplamiento directo y que generalmente no son nombradas como importantes.
En este trabajo se hace un análisis de tres tipos diferentes de motores de acoplamiento directo, en el que el motor de CD efectivamente tiene una alta eficiencia, pero su gran desventaja son las corrientes transmitidas a través de la conmutación mecánica lo que genera un gran desgaste en escobillas y conmutador. Otra gran desventaja es el ruido excesivo no deseado que ocasiona disturbios en el control. El otro tipo de motor de acoplamiento directo estudiado en este trabajo es el motor de CD sin escobillas que tiene tan alta eficiencia como el motor de CD con escobillas y además elimina las desventajas de este, al no usar escobillas no produce ruido y no sufre desgaste en escobillas y conmutador. Otra gran ventaja del motor de CD sin escobillas es la gran disipación de calor,
75

esto es por que los devanados están montados sobre el estator que se encuentra en contado con la carcaza del motor a través de una gran área.
Por ultimo el motor de reludancia variable es un motor de baja. velocidad y alto torque que generalmente tiene 1.5 veces el torque que un motor de CD del mismo tamal'lo, pero en general tiene caraderísticas de mayor inestabilidad en el torque y caraderísticas no lineales en torque-velocidad, esto hace que su aplicación en robots de acoplamiento diredo sean críticas.
También cabe recalcar las diferencias entre los métodos de transmisión serial y paralelo, en las que en la transmisión serial los motores de las articulaciones tienen interacción entre ellos y en la forma de transmisión paralelo no existe ninguna interacción entre los motores
Un fador clave para elegir el motor de acoplamiento diredo adecuado para nuestro disel'lo, es el de identificar la constante del motor, lo cual es fadible hacerlo conociendo la carga, la posición y la potencia disipada en el sistema.
Regresando a las diferencias entre las transmisiones seriales y paralelas podemos traducir que el mecanismo paralelo tiene una potencia de disipación menor que la del mecanismo serial utilizando los mismos motores y que cubren el mismo espacio de trabajo. Esto es una herramienta que ayuda a seleccionar el disel'lo de las articulaciones del brazo manipulador para una aplicación especifica.
Este trabajo es una herramienta útil para el disel'lador de un robot ya que el contenido indica claramente las ventajas de utilizar un motor de acoplamiento diredo, además se dan opciones de tipos de motores que es posible utilizar y queda en el disel'lador la decisión de usar el más apropiado de acuerdo a sus necesidades y posibilidades.
La fadibilidad de desarrollar este tipo de motores es total ya que como se menciona en eJ trabajo existen algunas empresas que adualmente están fabricando este tipo de motores. Aunque como es una tecnología reciente es relativamente alto el costo. Esto es tan cierto que las implementaciones prédicas de estás tecnologías se han realizado en instituciones como el ITM y la Universidad de Camegie Mellon.
También es posible que un futuro este trabajo sirva no solo al disel'lador de robots si no que también a cualquier aplicación industrial que involucre un control preciso y un alto torque. Es definitivo que la aplicación de acoplamiento diredo en la robótica en un futuro cercano es inminente y una opinión personal es que va a llegar a desplazar en gran medida a la transmisión eledromecánica.
76

Es importante mencionar que este tema de motores eléctricos de acoplamiento directo es un tema nuevo que no ha tenido mucha propaganda pero que realmente en un futuro cercano va a llegar a ser muy diwlgado y usado en la industria general por todas las características antes mencionadas.
77

BIBLIOGRAFIA:
(1) Asada and Youcef-Toumi Direct-Drive Robots Cambridge, Massachusetts London, England, 1987
The MIT Press
(2) Butler Michael S. & Tesar Delbert An Applications-Based Assessment of Present and Future Robot Development The University of Texas at Austin Press, 1992
(3) Rivin, Eugene l. Mechanical Design of Robots McGraw-Hill, 1988
(4) Azeddine Kaddouri & Hoang Le-Huy Analysis and Design of a Slotless NdFeB Permanent-Magnet Synchronous Motor for D1rect Orive Electrical Engineering Departement Leval University: Québec, PQ, Cenada G1 K 7P4 (Paper 1992 IEEE).
(5) J. Hollerbach, 1 Hunter, J. Leng, R. Sepe, E. Vaaler, l. Garebieta The McGill/MIT Direct Orive Motor Project Biorobotics Laboratory McGill University, Montreal, Quebec, Laboratory for Electromagnetic & Electronic Systems MIT, Cambridge, MA. (Paper 1993 IEEE)
(6) S K Pal, Comparative Study of the Design and Development of Direct Orive Brushed end Brushless OC Motors with Samarium Cobalt, Neodymium-lron-Boron end Ceramic Magnets, lntelligent Motion Conference, 1992, Numberg, Germany. (Paper 1992, IEEE)
(7) Petrick F. Muir, lntelligent Machine Principies Division SNL Alburquerque, NM, Linearizing the Joint Torque Characteristics of en Electric Direct-Drive Robot for High Peñormance Control of ln-Contact Operations. (Paper 1992, IEEE).
(8) S. K Pal, MSc, CEng, MIEE, Direct Orive High Energy Permanent Magnet Brush and Brushless OC Motors for Robotic Aplications, Muirhead Vactric Components Limited London EW. (Paper 1992, IEEE)
(9) Fumio Ozaki, Hideaki Hashimoto, Masataka Meruyama and Hirokazu Mayede, Energy Science end Technology Laboratory Toshiba Research And Development Center, Kawasaki, Japon. (Paper 1990, IEEE)
(10) David G. Taylor, Composite Control of Direct-Drive Robots. Gergia lnstitute of Technology School of Electrical Engineering, Atlanta Georgia, (Peper 1989 IEEE)
(111 R. D. Lorenz, J.J. Zik, D. J. Sykora, A Direct-Drive, Robot Parts & Tooling Gripper with High Peñormance Force Feedback Control. Dept. of Mechanical Engineering and Dept. of Electrical & Computer Engineering. University of Wisconsin-Madison, WI. (Paper 1989, IEEE)
(121 Stephen C. Stoicovy, Geared Versus Gearless Adjustable-Speed Orive Systems in the Pulp and Paper lndustry. OC Motor and Generator Departament, General Electric Company. (Paper 1986 TAPPI, IEEE)
78

[13) H. Kazerooni, S. Kim, A New ARchitecture for Direct Orive Robots, Mechanical Engineering Departament University of Minnesota. (Papar 1988, IEEE).
79

Arturo Guzmán Sánchez trato directo
Rep. de Cuba 99 Desp. 29-A "' Centro Histórico "' Tel. 512-10-20
Related Documents