A d v an c ed Con t r ol Technolo g y Club A d v an c ed Co n t r ol Tec hnolog y Cl ub (A CT Club ) (A CT Cl u b ) PID CONTROL PID CONTROL Presentation provided by Dr Andy Clegg Presentation pro vid ed by Dr Andy Clegg

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 1/62
Advanced Control Technology Club Advanced Control Technology Club(ACT Club)(ACT Club)
PID CONTROLPID CONTROL
Presentation provided by Dr Andy CleggPresentation provided by Dr Andy Clegg

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 2/62
Presentation OverviewPresentation OverviewIntroduction
PID parameterisation and structure
Effects of PID terms
Proportional, Integral and Derivative terms
Tuning PID Controllers
Equivalence of PID and Lead-Lag
controllers
Implementation aspects of PID

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 3/62
Introduction to PID ControlIntroduction to PID Control
Proportional-Integral-Derivative control
Predominant controller used in industry
Reason: it is adequate for most applications
Initially: analogue implementation
Now: mostly digital

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 4/62
Motivation and LimitationsMotivation and LimitationsMotivation
Simple to get working Can be tuned to meet time-domain specifications
Readily available in PLC/DCS systems
Digital and analogue implementation easy
Limitations
For single-input single-output systems only
Difficult to tune to meet precise specifications
Subtle differences in implementation causes problems

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 5/62
Idealised PIDIdealised PID--ControllerControllerConfigurationConfiguration
u(s)K(s)
r(s)
e(s)
y(s)PlantController
Set-Point Output

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 6/62
Generic PID Control EquationsGeneric PID Control Equations
Time domain:
Laplace domain:
However there are many different structures ...
D I
t
P
c dt
de
k dt t ek t ek t u 3
0
21 )()()( ++= ∫
D
s sE k
I
s E s
k s E k sU c )()()()( 3
2
P
1 ++=

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 7/62
““ IdealIdeal”” PID ParameterisationPID Parameterisation
K c: proportional coefficient
Ti: integral time constant
Td: derivative time constant
Common in PLC and DCS implementations
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
++= ∫ dt
de
T edt T t e K t u d
t
icc
0
1
)()(

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 8/62
““ ParallelParallel”” PID ParameterisationPID Parameterisation
K p: proportional gain = K c
K i: integral gain = K c/Ti
K d: derivative gain = K cTd
Used in SW tools (e.g. Matlab) and some
industrial systems
dt
de K edt K t e K t u d
t
i pc ++=
∫0)()(

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 9/62
““ SeriesSeries”” PID ParameterisationPID Parameterisation
K c: proportional coefficient
Ti: integral time constant
Td: derivative time constant
Is found in some industrial systems
Historically popular since can be implemented
with just one op-amp
⎥⎦
⎤
⎢⎣
⎡ +⎥⎥⎦
⎤
⎢⎢⎣
⎡+=
∫ dt
deT t edt
T K t u d
t
i
cc )(.)(1
1)(
0

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 10/62
PID ParameterisationPID ParameterisationThere are also differences in units for gain terms
Proportional gain:
as a pure gain or proportional band (= 100%/gain)
Integral gain: as reset (i.e. K i, units of repeats per second or minute)
or integral time (i.e T i, units of seconds or minutes)
Derivative gain:
as derivative time (i.e T d , units of seconds or minutes)

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 11/62
PID Control ActionPID Control Action Traditionally the PID terms act on the error signal, as in
previous equations. In process applications it is common to have derivative
acting on the output rather than error
Called “ PI-D” or “ Derivative on PV ”
In some cases the proportional control can act on the loop
output as well
Called “ I-PD” or “SP on I-only”
Note: if the set-point is constant
then all three forms are
equivalent, they only differ when
the set-point changes …..

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 12/62
PID Control ActionPID Control Action Response of a PID acting on the error signal
Loop Output
Set-Point
Controller Output
The big spike in controller outputis due to the set-point step being
fed directly through derivative

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 13/62
PIPI--D Control ActionD Control Action Response of a PI-D (i.e. Derivative on PV)
Loop Output
Set-Point
Controller Output
The spike in controller outputis smaller - derivative “kick”
has been eliminated

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 14/62
II--PD Control ActionPD Control Action Response of an I-PD (i.e. Proportional & Derivative on PV)
Loop Output
Set-Point
Controller Output
No spike in controller output- both proportional and
derivative “kick” eliminated
I-PID Control should not be used on
integrating processes (e.g. level control)

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 15/62
PID ParameterisationPID Parameterisation These many different forms of PID do cause problems:
each has different behaviour
each require different tuning rules
you must know which form is used before doing any tuning, design and/or
simulation
However, it can provide an additional degree of freedom
when designing a control system
8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 16/62
Effects of P, I & D TermsEffects of P, I & D Terms
Proportional Action
First-order plant
Second-order plant
Integral Action
First-order plant
Derivative Action
First-order plant Second-order plant
Rate feedback

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 17/62
ProportionalProportional -- 1st Order Plant1st Order PlantFirst-order plant:
Pole at s = -a, steady-state gain 1/a
Closed-loop TF:
New pole s = -(a+K c )
Steady-state error with step input:
cc ss
K a
a
a s
K s s K sG s s
se
+=
++→
=+→
=1
1
0lim
)()(1
11
0lim
c
c
K a s
K
s K sG
s K sG
sr
s y
++=
+=
)()(1
)()(
)(
)(
a s sG
+=
1)(
However, proportional gain cannot just be increased arbitrarily to
remove steady-state error. Problems arise with actuator saturation
and instability with real, higher-order plant

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 18/62
Time (sec.)
A m p l i t u d e
Step Response
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Kc=1
Kc=2
Kc=10
ProportionalProportional -- 1st Order Plant1st Order Plant
Response to unit step set-point change:

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 19/62
ProportionalProportional -- 2nd Order Plant2nd Order PlantSecond-order plant:
Closed-loop TF:
As K c increases:
CL natural frequency increases
CL damping ratio decreases overshoot increases
steady state error decreases
22
2
2)(
nn
n
s s sG
ω ζω
ω
++=
( )cnn
c
K s s
K
sr
s y
+++=
22 2)(
)(
ω ζω

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 20/62
Time (sec.)
A m p l i t u d e
Step Response
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Kc=1
Kc=2
Kc=10
Response to unit step set-point (ζ = 0.4, ωn = 3)
ProportionalProportional -- 2nd Order Plant2nd Order Plant

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 21/62
Integral ActionIntegral Action
Objective is to remove steady-state error
PI controller in time domain:
Laplace domain:
With a constant error:
⎟⎟
⎠
⎞⎜⎜
⎝
⎛ += ∫t
icc edt
T e K t u
0
1)(
⎟⎟ ⎠ ⎞⎜⎜
⎝ ⎛ +=
sT K s K
ic
11)(
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=⎟
⎟
⎠
⎞⎜⎜
⎝
⎛ +=⎟
⎟
⎠
⎞⎜⎜
⎝
⎛ += ∫∫
ic
t
ic
t
icc
T
et e K dt
T
ee K edt
T e K t u
00
11
)(
That is, if a constant error exists the controller output
will keep increasing, until the error is zero …...

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 22/62
Integral ActionIntegral Action -- CConstant Error onstant Error

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 23/62
Integral ActionIntegral Action
--
1st Order Plant1st Order Plant
Plant: Controller:
Closed-loop TF:
CL natural frequency and damping rationow functions of T i
Steady state error now removed:
a s sG
+=
1)(
22
2
2 21
1
)(
)(
ncl ncl cl
ncl
ii s s saT sT sr
s y
ω ω ζ
ω
++=
++=
sT s K
i
1)( =
01
0
0
110lim
111
1
0lim =
+=
++→
=
++→
=
iii
ss
aT T a s s
s
s
sT a s
se

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 24/62
Integral ActionIntegral Action -- 1st Order Plant1st Order Plant
Time (sec.)
A m p l i t u d e
Step Response
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Ti=0.1
Ti=1
Ti=4
Response to unit step set-point change:

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 25/62
Derivative ActionDerivative Action
Objective: stabilise system; slow down transients
PD controller:
In Laplace domain:
With constant error, derivative action = 0 no contribution to steady-state behaviour
With transients on error, derivative action = large
risk actuator saturation from measurement noise, step changes
in set-point
⎟ ⎠
⎞⎜⎝
⎛ +=
dt
deT t e K t u d cc )()(
( ) sT K s K d c += 1)(

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 26/62
DerivativeDerivative -- on Loop Outputon Loop Output
Derivative often used in feedback path only i.e PI-D control
( ))()()( s syT se K su d cc −=
Plant
G(s)
K C T d s
K C
+
-
+
-
P-D Controller
r(s) y(s)e(s) uC (s)
( ))()()( s syT se K su d cc −=
Eliminating e(s), using e(s) = r(s) - y(s), gives …..

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 27/62
( ))()()( s syT se K su d cc −=
Plant
G(s)
K C (1+T d s)
K C
+
-
P-D Controller
r(s) y(s)uC (s)
( ))()()()( s syT s y K sr K su d ccc +−=
DerivativeDerivative -- on Loop Outputon Loop Output
Derivative often used in feedback path only i.e PI-D control
K(s)
K ff (s)
( ) sT GK
GK CLTF
d c
c
++
=11

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 28/62
DerivativeDerivative -- 1st Order Plant1st Order Plant
Plant: Controller:
Closed-loop TF:
Closed-loop pole: as T d is increased, CL response gets slower
Steady state error not effected by T d :
( ) sT K s K
K s K
d c
c ff
+=
=
1)(
)(
( ) cd c
c
K a sT K
K
sr
s y
+++=
1)(
)(
)1()( d cc T K K a s ++−=
( )a
K sT K
a s
se
cd c
ss
+=
++
+→=
1
1
11
1
1
0lim
a s sG
+=
1)(

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 29/62
DerivativeDerivative -- 1st Order Plant1st Order Plant
Time (sec.)
A m p l i t u d e
Step Response
0 2 4 6 8 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Td=1
Td=2
Td=5
Response to unit step set-point change:

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 30/62
DerivativeDerivative -- 2nd Order Plant2nd Order PlantGeneralised Plant:
Closed-loop TF:
CL natural frequency:
CL damping ratio:
Steady-state error is not effected by T d
22
2
2)(
npnp p
np
s s sG
ω ω ζ
ω
++=
( ) ( ) 222
2
12)(
)(
npcd npcnp p
npc
K sT K s
K
sr
s y
ω ω ω ζ
ω
++++=
d
c
npc
c
pcl T
K
K
K ++
+=
121
ω ζ ζ
cnpncl K += 1ω ω

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 31/62
DerivativeDerivative -- 2nd Order Plant2nd Order Plant
Time (sec.)
A m p l i t u d e
Step Response
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Td=0.1
Td=0.3
Td=0.6
Response to unit step set-point change:

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 32/62
DerivativeDerivative -- as Rate Feedbackas Rate Feedback
Implementation using direct measure of derivative
Similar to P-D control
with K r = K cT d
G*
K r
K C
+
-
+
-
Controller Plant, G(s)
ω θr(s) y(s)e(s) 1
s
( ) s K K G
GK CLTF
r c
c
++=
1
angular
velocity
angle

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 33/62
Tuning PID ControllersTuning PID ControllersFundamental Trade-offs
Applicability of PID
Process Reaction Tuning
Sustained Oscillation Tuning
IMC PID Tuning
Advanced Tuning Methods

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 34/62
Fundamental TradeFundamental Trade--offsoffs
Set-point tracking:
Good tracking performance K(s)G(s) large
Stability:
Keep K(s)G(s) away from -1 limit on K(s)
Disturbance rejection:
Reduce effect of disturbances K(s) large
Noise immunity:
Noise should not excite u(s) limit on K(s)

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 35/62
PI controllers adequate for most applications
Derivative action is rarely utilised
often misunderstood due to the many different forms and the
different ways in which they work
For dominant second (and higher) order plants
PID control may be more appropriate
additional D term can provide damping to reduce overshoot
D can be beneficial for slow thermal processes
Applicability of PID Applicability of PID

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 36/62
The following generalisation is from Shinsky
("Process Control Systems", McGraw Hill, 1979)
There will always be exceptions, so need tuning rules ...
Process Proportional Band (%) Integral Derivative
Flow 100-500 essential no
Pressure, liquid 50-200 essential no
Pressure, gas 0-5 no no
Level 5-80 seldom no
Vapour (T and p) 10-100 yes essential
Chemical Composition 100-1000 essential if possible
Applicability of PID Applicability of PID

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 37/62
Plant in open loop with and input unom
Apply a step to input (u step
) and record the
response
Determine L and R from the response
Process Reaction TuningProcess Reaction Tuning
T
y y
T
y R
nom step
Δ
−=
Δ
Δ=

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 38/62
Normalise R:
Use L and R N in this table to give PID settings
Process Reaction TuningProcess Reaction Tuning
nom step N
uu
R R
−=
Controller K p T i Td
P 1.0/(R NL) - -
P+I 0.9/(R NL) 3L -
P+I+D 1.2/(R NL) 2L 1/(2L)
8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 39/62
Carried out with plant in closed-loop
useful for open-loop unstable plant
Using a proportional-only controller, increase the
gain until sustained oscillations are attained
need to be careful that oscillations do not upset normal running
Record the gain ( K c) and the period of theobserved oscillations (T c)
Sustained Oscillation TuningSustained Oscillation Tuning
8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 40/62
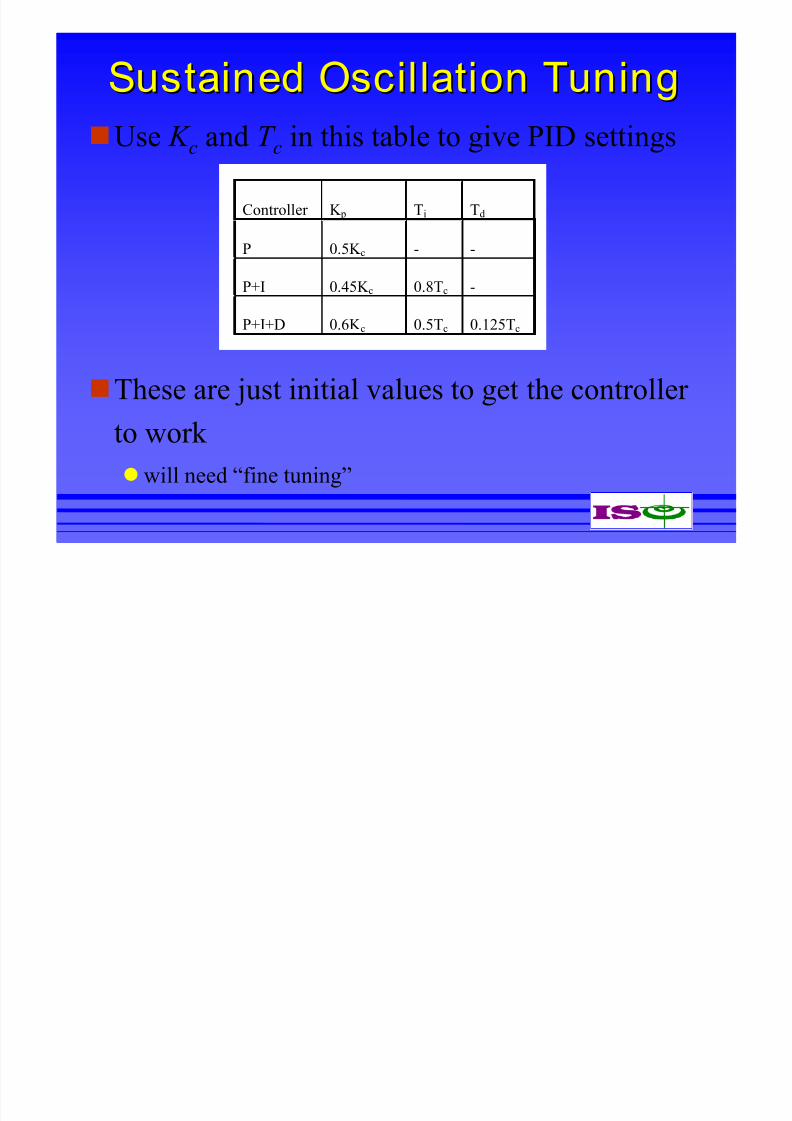
Use K c and T c in this table to give PID settings
These are just initial values to get the controller
to work
will need “fine tuning”
Sustained Oscillation TuningSustained Oscillation Tuning
Controller K p Ti Td
P 0.5K c - -
P+I 0.45K c 0.8Tc -
P+I+D 0.6K c 0.5Tc 0.125Tc
8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 41/62
“IMC” = Internal Model Control
Requires plant model
model structure and order (e.g. first order with dead-time)
parameters such as gains, dead-time and time constants
usually obtained from plant tests
… and desired closed loop time constant ( β )
IMC formulae give required PID gains for
specified plant model and β
IMC PID TuningIMC PID Tuning

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 42/62
If the plant model is:
first order - controller = PI
second order - controller = PID
first order + dead-time - controller = PID
For higher order plant models, resulting PID isonly an approximation of true IMC controller
Tools are available that contain the formulae e.g. “EZYtune” (http://www.unac.com.au/ezytune)
IMC PID TuningIMC PID Tuning

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 43/62
Aström and Hagglund (“Relay”) Auto-tuning:
similar to sustained oscillation method, but uses a relay with
dead-zone to establish oscillations
tuning rules built into controller so that it can perform this test
and automatically re-tune itself
PID tuning using system identification and
closed loop pole placement
called “self-tuning” if carried out on-line and automatically
Advanced Tuning Methods Advanced Tuning Methods

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 44/62
define desired performance
rise time, peak overshoot, stability margins, etc.
identify the dominant plant dynamics
look at interaction with neighbouring loops
which PID configuration is being used ? consider saturation
examine set-point tracking and disturbance
rejection of CL system
has the desired performance been met ?
Loop Tuning Check ListLoop Tuning Check List

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 45/62
PID and LeadPID and Lead--Lag ControllerLag ControllerCharacteristicsCharacteristics
PI similar to lag-compensator
PD similar to lead-compensator
…. shown in the following bode plots
PI & L C tPI & L C t
8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 46/62
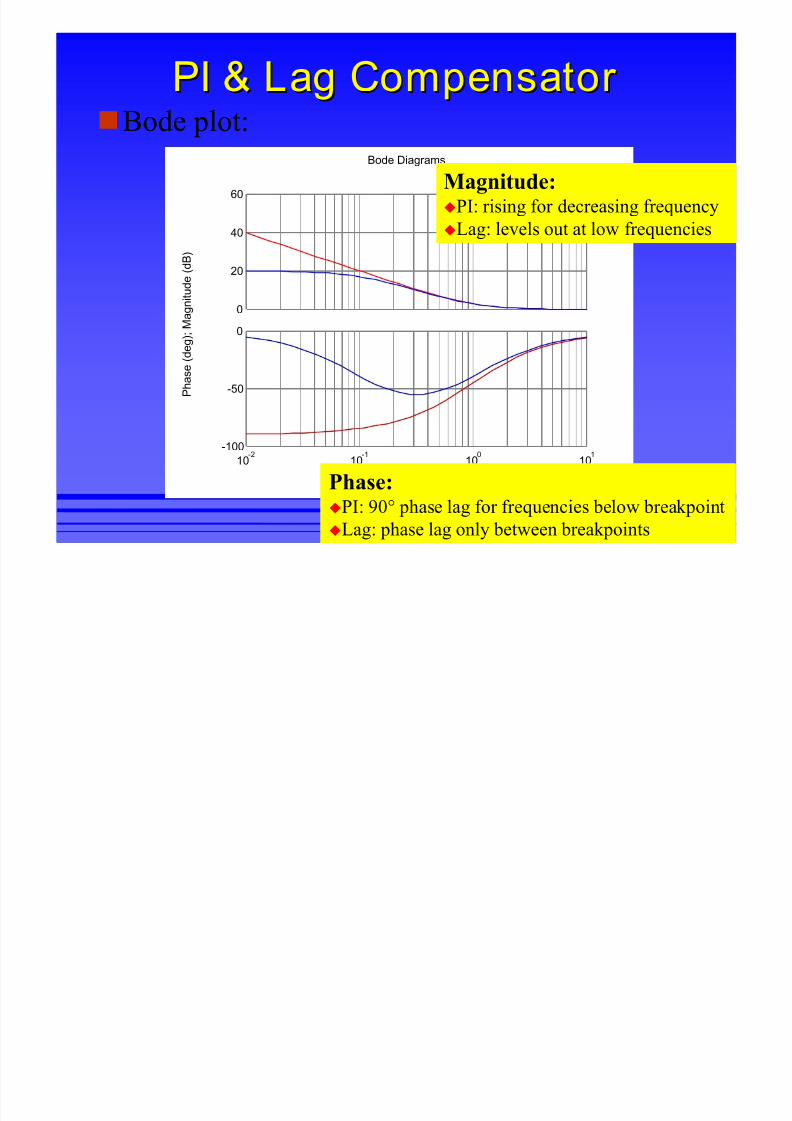
PI & Lag Compensator PI & Lag Compensator
Frequency (rad/sec)
P h a s e ( d e g ) ; M a g n i t u d e ( d B )
Bode Diagrams
10-2
10-1
100
101
-100
-50
00
20
40
60
PIlag
Bode plot:
Magnitude:
PI: rising for decreasing frequencyLag: levels out at low frequencies
Phase:PI: 90° phase lag for frequencies below breakpoint
Lag: phase lag only between breakpoints
PD & L d C t

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 47/62
PD & Lead Compensator PD & Lead Compensator
Frequency (rad/sec)
P h a s e ( d e g ) ; M a g
n i t u d e ( d B )
Bode Diagrams
10-1
100
101
102
0
50
100
0
20
40
60
PDlead
Bode plot:Magnitude:PD: rising for increasing frequency
Lead: levelling out
Phase:PD: 90° phase lead for frequencies above breakpoint
Lead: phase lead only between breakpoints

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 48/62
Implementation Aspects of PIDImplementation Aspects of PID
Bumpless Transfer
Derivative Filtering
Integral Windup
Digital Implementation

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 49/62
Bumpless Transfer Bumpless Transfer Prevents spiky demand signals to actuators when
switching between different control modes
Occurs when switching from manual to automatic
Cause: controller output different from current signal
Solution: set reference to follow current plant output value
called a “tracking” controller
Derivative action on PV also helps

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 50/62
Derivative FilteringDerivative FilteringMost industrial PID controllers have some filtering
on derivative actionPrevents noisy measurements giving noisy
controller outputs
Usually applied as:
α = derivative time multiplier
typically in range 0.06 0.13
1+ sT
sT
d
d
α
Integral WindupIntegral Windup

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 51/62
Integral WindupIntegral Windup
Caused by integral action and actuator saturation
Can lead to instability
Graphical RepresentationGraphical Representation

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 52/62
Graphical RepresentationGraphical Representation
This “extra control” is a time delay
- which can destabilise the plant.
AntiAnti Windup MechanismsWindup Mechanisms

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 53/62
Anti Anti --Windup MechanismsWindup Mechanisms
+
Analogue implementation:
In practice it is difficult to set-up gain K
AntiAnti Windup MechanismsWindup Mechanisms

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 54/62
Anti Anti --Windup MechanismsWindup Mechanisms
Logic/digital implementation easier:
Anti-windup present in most industrial controllers
*
*
Δu1 if Δu = 0
0 if Δu<>0
Di it l I l t ti

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 55/62
Digital ImplementationDigital Implementation
A continuous time PID controller is given by:
This can be cast into this discrete time form:
where k is the sample number and τ s is the
sampling period
dt
de K dt t e K t e K t u d
t
i pc
∫ ++=0
)()()(
[ ])1()()()()(
0
−−++= ∑=
k ek e K
je K k e K k u s
d k
j
si pcτ
τ
Di it l I l t ti

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 56/62
Digital ImplementationDigital Implementation
This may be re-written as:
or:
The change in controller output (Δuc) is calculated
and the inherent digital integrator forms uc(k)
Called an “incremental PID” controller
[ ] [ ])2()1(2)()()1()()1()( −+−−++−−+−= k ek ek e K
k e K k ek e K k uk u s
d si pccτ
τ
)()1()( k uk uk u ccc Δ+−=

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 57/62

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 58/62
Extra SlidesExtra Slides
Generic EquationsGeneric Equations

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 59/62
Generic EquationsGeneric Equations
Closed-loop TF from reference to error
Type 0 servo, unit-step steady-state error
Type 1 servo, unit-ramp steady-state error
)(G(s)K(s)1
1)( sr se+=
p ss
k s s K sG s
se
+=⎟⎟
⎠ ⎞
⎜⎜⎝ ⎛
+→=
1
11
)()(1
1
0lim
v ss
k s s K sG s
se
11
)()(1
1
0lim
2 =⎟⎟
⎠
⎞⎜⎜⎝
⎛
+→=
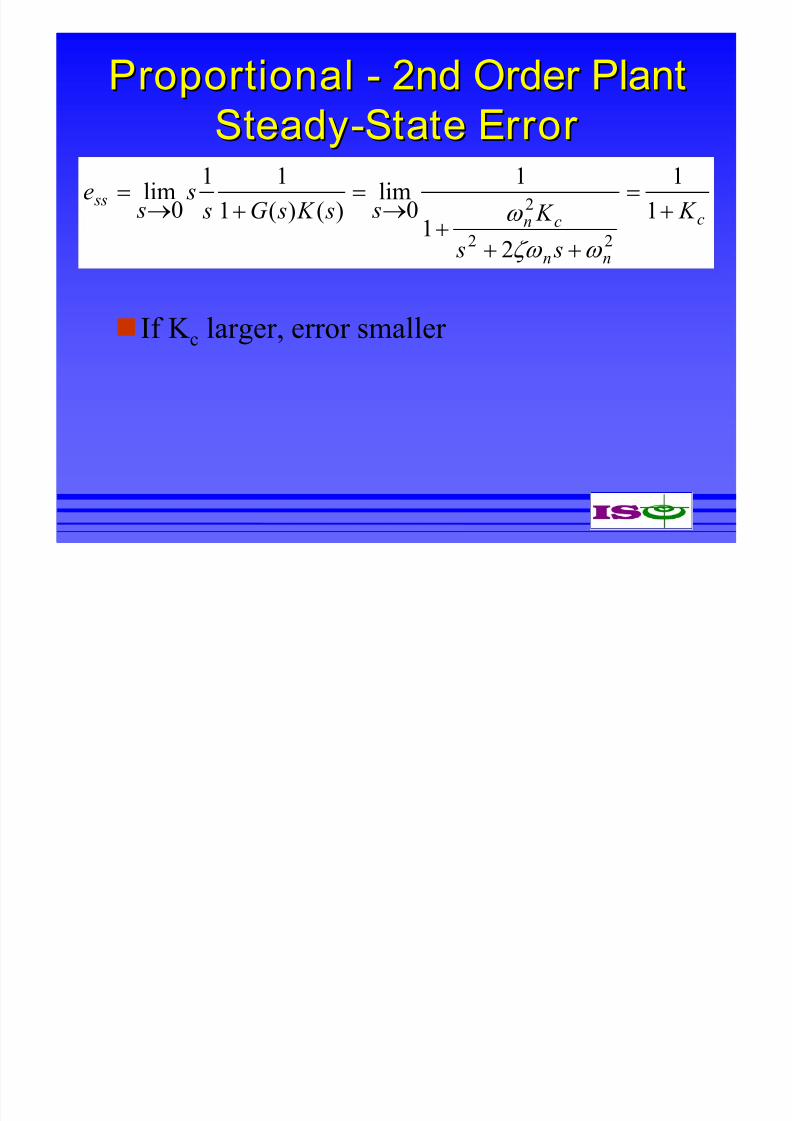
ProportionalProportional -- 2nd Order Plant2nd Order Plant
8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 60/62
ProportionalProportional 2nd Order Plant2nd Order Plant
SteadySteady--State Error State Error
If K c larger, error smaller
c
nn
cn
ss
K s s
K s s K sG s
s
s
e
+
=
+++→
=
+→
=
1
1
21
1
0
lim
)()(1
11
0
lim
22
2
ω ζω ω

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 61/62
Integral control:
Proportional-integral control:
01
0
0
110lim
111
1
0lim =
+=
++→
=
++→
=
iii
ss
aT T a s s
s
s
sT a s
se
011
0110
lim1
11
1
10
lim ==
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
++
→=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +
++
→=
ic
ic
ic
ss
T K
aT s K
a s s
s s
sT K
a s
se
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=
sT K s K
ic
11)(
Integral ActionIntegral Action -- 1st1st--Order PlantOrder PlantSteady State Error Steady State Error
DerivativeDerivative - 2nd Order Plant2nd Order Plant

8/10/2019 L03 ACT PID
http://slidepdf.com/reader/full/l03-act-pid 62/62
DerivativeDerivative -- 2nd Order Plant2nd Order Plant
Steady-state error:
( )
c
d cnpnp p
np
d c
npnp p
np
ss K
sT K s s
sT K s s
se
+=
++++
+++
→=
1
1
121
21
0lim
22
2
22
2
ω ω ζ
ω
ω ω ζ
ω
Related Documents











