Sistem Kendali : Sesi 1 X-29

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Sistem Kendali : Sesi 1
X-29

Syllabus1. Control System : Introduction2. System Dynamic Modelling3. Frequency Model4. Time Model5. System Response6. Stability Of System7. Steady State Errors8. UTS 9. Root Locus Technique10. Controller Design Using Root Locus Technique11. Frequency Response Technique12. Analysis of Frequency Response13. Controller Design Using Frequency Response Technique14. Controller Design Technique For Time Domain Model15. Observer Design Technique16. UAS
Penilaian Tugas : 20 % Kuis : 20 % UTS : 30 % UAS : 30 %
Periode
UTS : 20 sd 24 Okt 2014
UAS : 8 sd 19 Des 2014

Referensi1. Norman S. Nise,” Control Systems Engineering, Sixth
Edition”, John Wiley & Sons, Inc.2. Katsuhiko Ogata, “Modern Control Engineering,Fifth
Edition”, Prentice Hall.3. Richard C. Dorf, Davis Robert H. Bishop,” Modern Control
Systems, twelfth edition ”, Prentice Hall.4. Graham C. Goodwin,Stefan F. Graebe,Mario E. Salgado,”
Control System Design”

What is Control?• To control a system means to make outputs of interest follow a
desired behavior (trajectory, profile) despite disturbances and other errors.
• In Automatic Control, the corrective actions required to achieve the required output behavior are performed by machine.
• The design, construction and deployment of the controlmachinery involves diverse skills, usually not found in a singleperson. Control technologists deal mostly with the construction and deployment of control hardware. Control theorists deal with the mathematical principles behind dynamic systems (usually described by differential equations). The ME‟s role in control is focused in the early stages of design: mathematical modeling, simulation and determination of control algorithms.
Control System Definition
• A control system consists of subsystems andprocesses (or plants) assembled for the purpose ofobtaining a desired output with desiredperformance, given a specified input.
Control System
Desired response Actual response
History of Control System Theory• 1868 first article of control „on governor‟s‟ –by Maxwell•1877 Routh stability criterien•1892 Liapunov stability condition•1895 Hurwitz stability condition•1932 Nyquist•1945 Bode •1947 Nichols•1948 Root locus•1949 Wiener optimal control research•1955 Kalman filter and controlbility observability analysis•1956 Artificial Intelligence•1957 Bellman optimal and adaptive control •1962 Pontryagin optimal control•1965 Fuzzy set•1972 Vidyasagar multi-variable optimal control and Robust control•1981 Doyle Robust control theory•1990 Neuro-Fuzzy
History Of Control System
Control Books in English1. Murray F. Gardner and John L. Barnes. Transients in Linear Systems. Wiley, New York, 1942. 2. Ed S. Smith. Automatic Control Engineering. McGraw-Hill, New York, 1942. 3. Roosevelt Griffiths. Thermostats and Temperature Regulating Instruments. 1943. 4. Albert C. Hall. The Analysis and Synthesis of Linear Servomechanisms. Technology Press, MIT,
Cambridge, Massachusetts, 1943. 5. Hendrik W. Bode. Network Analysis and Feedback Amplifier Design. Van Nostrand, New York,
1945. 6. Donald P. Eckman. The Principles of Industrial Process Control. 1945. 7. LeRoy A. MacColl. Fundamental Theory of Servomechanisms. Van Nostrand, New York, 1945. 8. W. R. Ahrendt and J.F. Taplin. Automatic Regulation. 1946. 9. Hubert M. James, Nathaniel B. Nichols, and Ralph S. Phillips. Theory of Servomechanisms,
volume 25 of MIT Radiation Laboratory Series. McGraw-Hill, New York, 1947. 10. Henri Lauer, Robert Lessick, and Leslie E. Matson. Servomechanism Fundamentals. McGraw-
Hill, New York, 1947. 11. Gordon S. Brown and Donald P. Campbell. Principles of Servomechanisms. Wiley, New York,
1948. 12. Norbert Wiener. Cybernetics; or, Control and Communication in the Animal and the Machine.
Wiley, New York, 1948.
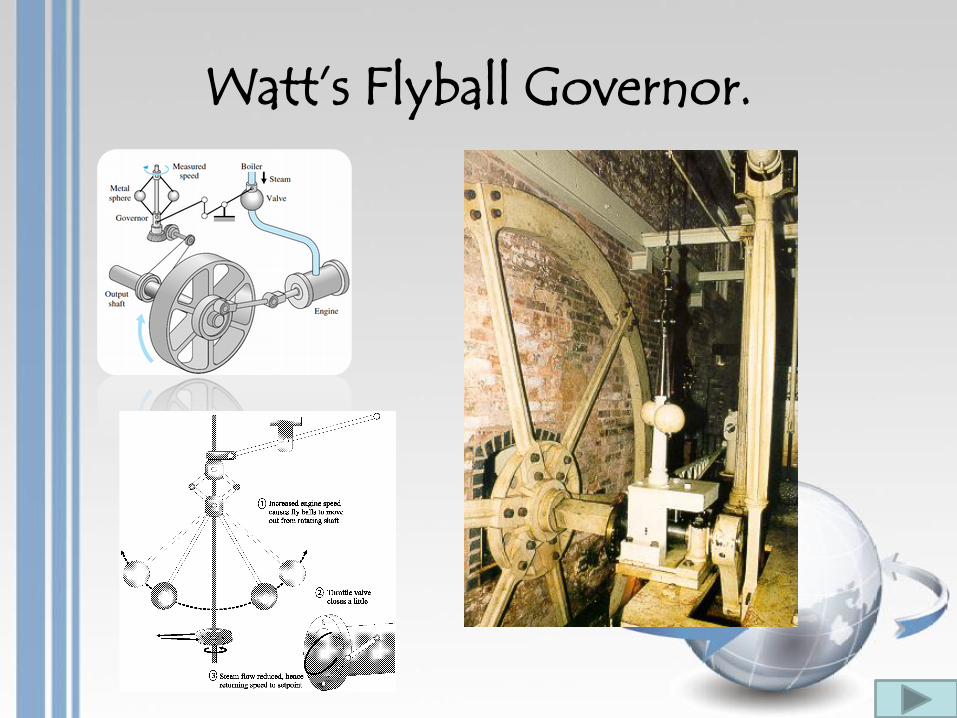
Watt‟s Flyball Governor.
Elevator

Programmable Logic Controller (PLC)
Manual relay panels from the early 1960s
First PLC of Allen Bradley, 1974
Control-Oriented Notion of System
• System: A device or process having identifiable inputs andoutputs. Drawing the boundaries of a system involves a degree of abstraction.
• Example: Input: Accelerator pedal position; Output: Speed.Alternative: Input: Fuel flow rate; Output: Torque.
• Inputs can be either manipulated at will or be undesirableexternal influences. We can set the pedal accurately, but wecan‟t predict or set the wind force. Undesirable, generallyunpredictable and often unmeasurable inputs (one of thecontrol engineer‟s enemies) are called disturbances.
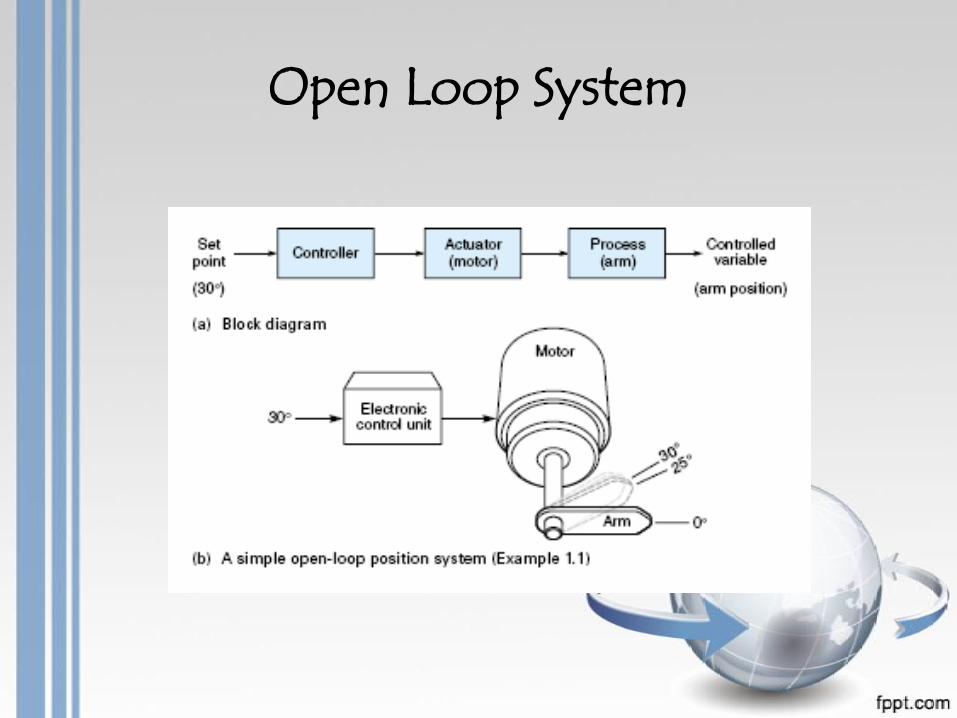
Open Loop System

Closed Loop System

Control System
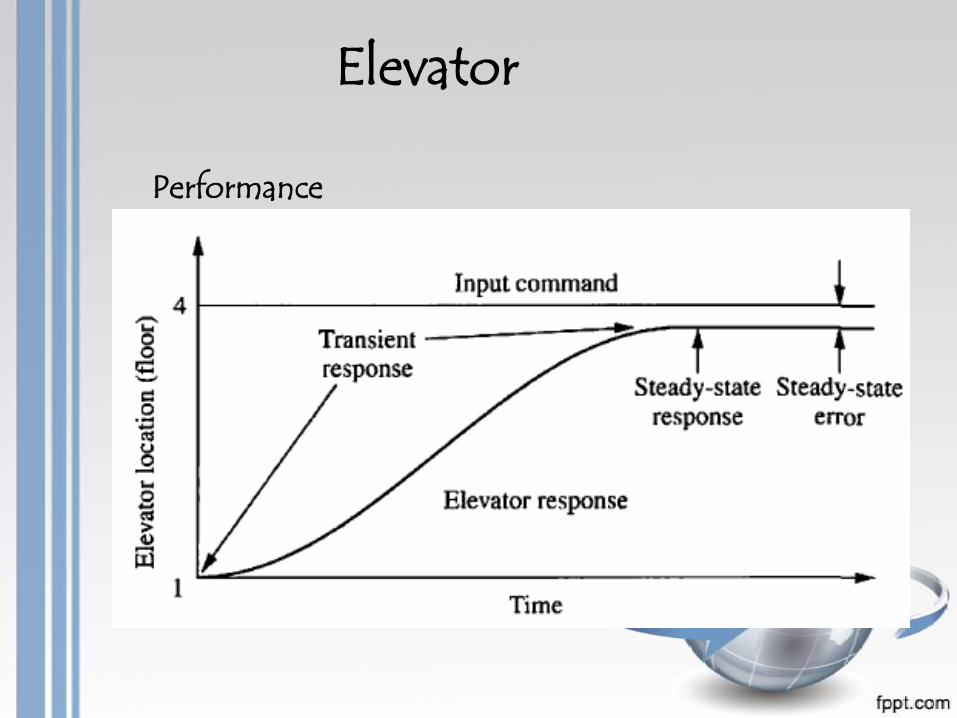
Elevator
Performance
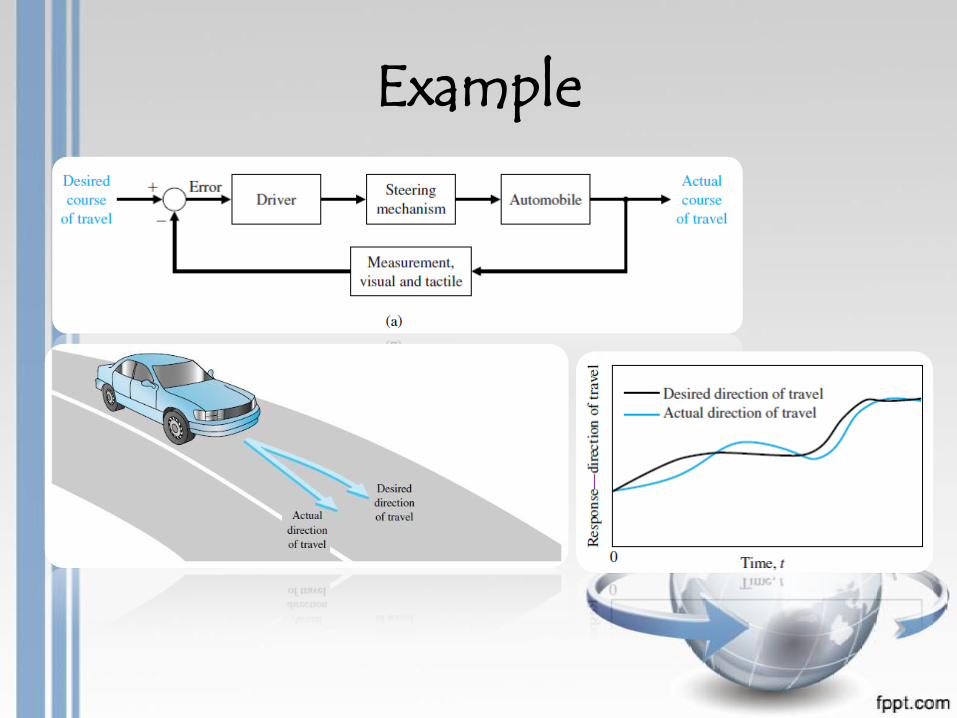
Example

Control System Design Process
1. Establish control goals
2. Identify the variables to
control
3. Write the specifications for
the variables
4. Establish the system configuration
& identify the actuator
5. Obtain a model of the process, actuator
& sensor
6. Describe a controller and select key
parameters to be adjusted
7. Optimize the paramters and analyze
the performance
If the performance meets the specifications, then finalize the design
If the performance does not meet the specifications, then iterate the configuration and the actuator

Plant
The physical layout of a plant is an intrinsic
part of control problems. Thus a control
engineer needs to be familiar with the
"physics" of the process under study. This
includes a rudimentary knowledge of the
basic energy balance, mass balance and
material flows in the system.
Objectives
Before designing sensors, actuators or
control architectures, it is important to know
the goal, that is, to formulate the control
objectives. This includes
• what does one want to achieve (energy reduction,
yield increase,...)
• what variables need to be controlled to achieve these
objectives
•what level of performance is necessary (accuracy,
speed,...)
Sensors
Sensors are the eyes of control enabling
one to see what is going on. Indeed, one
statement that is sometimes made about
control is:
If you can measure it, you can control it.

Actuators
Once sensors are in place to report on the
state of a process, then the next issue is the
ability to affect, or actuate, the system in
order to move the process from the current
state to a desired state

A typical industrial control problem will
usually involve many different actuators -
see below:
Figure 1.3: Typical flatness control set-up for rolling mill

A modern rolling mill

Communications
Interconnecting sensors to actuators,
involves the use of communication systems.
A typical plant can have many thousands of
separate signals to be sent over long
distances. Thus the design of
communication systems and their
associated protocols is an increasingly
important aspect of modern control
engineering.

Computing
In modern control systems, the connection
between sensors and actuators is invariably
made via a computer of some sort.
Thus, computer issues are necessarily part
of the overall design. Current control
systems use a variety of computational
devices including DCS's (Distributed Control
Systems), PLC's (Programmable Logic
Controllers), PC's (Personal Computers),
etc.
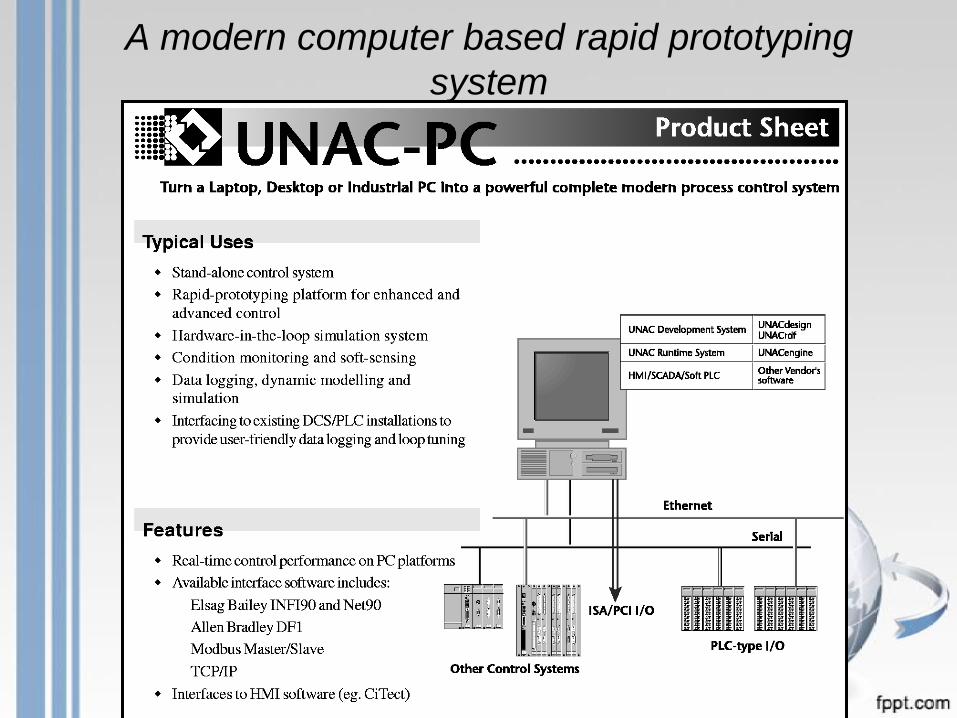
A modern computer based rapid prototyping
system

Sistem Kendali Ada Di Mana Saja(http://www.ieeecss.org/)
• Control systems are ubiquitous, essential, and largely invisible to the general public. Products ranging from the paper that we use, water that we drink, the newspapers that we read, to the drugs that treat our diseases depend on automatic controllers for their uniformity and consistency. A typical example regulates the thickness of aluminum sheets.
• Our homes are full of automatic control systems. There are thermostats to regulate the temperature of the house, the refrigerator, the dishwasher, the clothes washer and dryer, the oven, and the hot water heater. The level of water in the toilet tanks and the sump pump is also automatically controlled. Many household controllers are less obvious. These include the automatic controllers that regulate the flow of fuel to the furnace, those inside the TV, radio, CD and DVD players and any other electronic devices in the house and those that insure that our coffee maker and microwave oven work properly.
• The modern automobile is full of automatic controllers. Pollution is reduced, fuel is saved, and comfort is enhanced by automatic controllers in the car. Stability and control augmentation systems (SCAS) make nearly every modern vehicle easier for the human to control and safer. These systems work with the human operator to make him or her perform better. An excellent example is ABS brakes, one of the SCAS subsystems. Another excellent example of a SCAS is the basis for Robotic surgery. Still another example of a SCAS is the control system in the X-29 experimental aircraft.
http://www.ieeecss.org/general/control-systems-are-ubiquitous
Sistem Kendali Ada Di Mana Saja
• The X-29 was designed to be unstable. Without its control system (SCAS) it was unflyable. It would disintegrate within seconds. Difficulties in designing its controller led to important research and new knowledge on the limits of control systems.
• The members of the animal kingdom are also full of automatic controllers. The temperature of our body, the movements of our limbs, our heart rate and blood pressure, the amount of glucose in our blood, and our weight are all regulated by feedback controllers within our bodies. There are serious diseases that result from improper operation of these controllers. Automatically controlled insulin pumps and more and more sophisticated controlled prostheses are helping to mitigate these problems.
• Improvements in many aspects of our lives will depend on improved control systems. For example, better control system would greatly reduce the non uniformity in temperature that is so annoying in many office buildings and homes. It has already been demonstrated that autonomous vehicles can safely navigate a complicated closed course. Improvements in the control of automobiles could eliminate the need for a human driver and greatly enhance the safety of automobile travel. Safer cars could be made much lighter, thereby reducing the amount of energy they need to function.
http://www.ieeecss.org/general/control-systems-are-ubiquitous
Wilbur Wright to the Western Society of Engineers in 1901 :Men already know how to construct wings or airplanes, which when driven through the air at sufficient speed, will not only sustain the weight of the wings themselves, but also that of the engine, and of the engineer as well. Men also know how to build engines and screws of sufficient lightness and power to drive these planes at sustaining speed ... Inability to balance and steer still confronts students of theflying problem ... When this one feature has been worked out, the age of flying will have arrived, for all other difficulties are of minor importance.
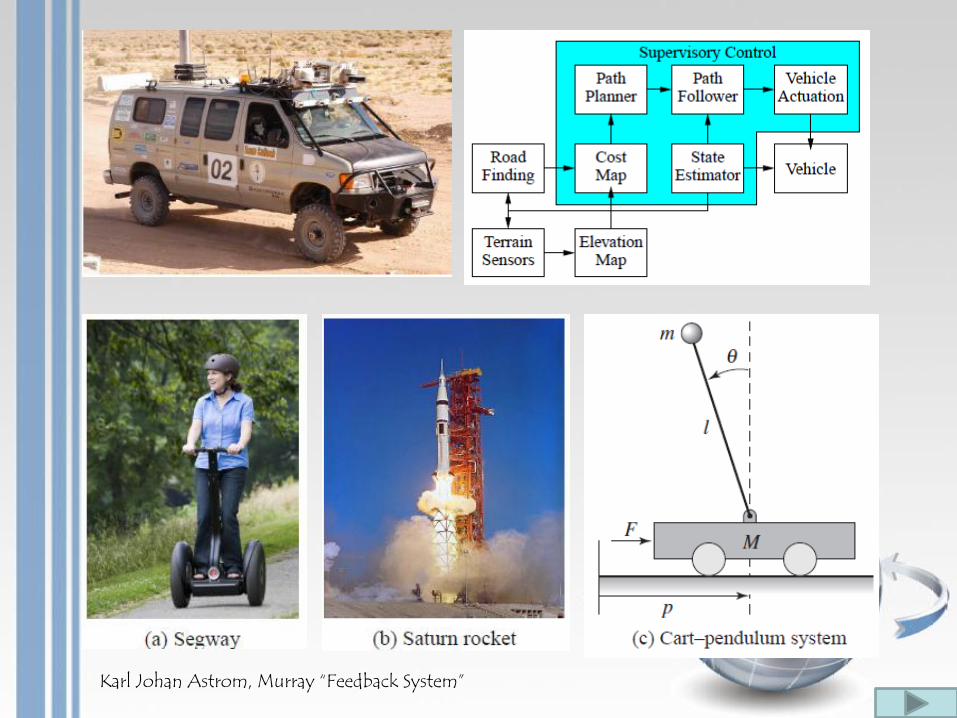
Karl Johan Astrom, Murray “Feedback System”
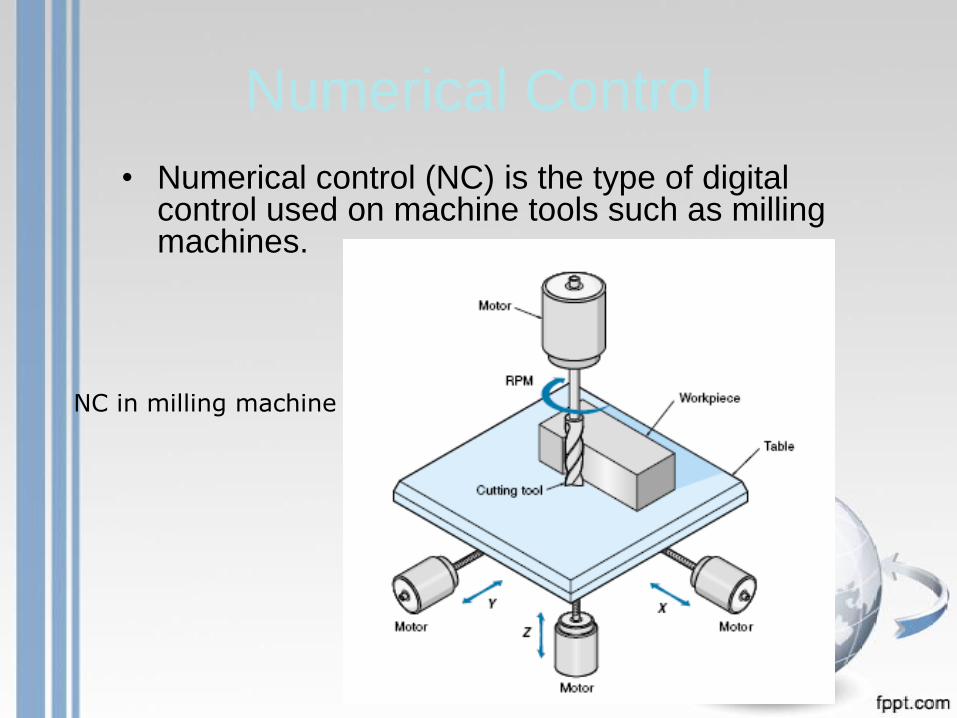
Numerical Control
• Numerical control (NC) is the type of digital control used on machine tools such as milling machines.
NC in milling machine

Robotics
Pick & Place robot
Large Industrial Robot

Contoh

Example
Sistem Kendali IndustriIndustrial control system (ICS) is a general term that encompasses several types of control systems used in industrial production, including Supervisory Control and Data Acquisition (SCADA) systems, distributed control systems (DCS), and other smaller control system configurations such as programmable logic controllers (PLC) often found in the industrial sectors and critical infrastructures.
ICSs are typically used in industries such as electrical, water, oil, gas and data. Based on data received from remote stations, automated or operator-driven supervisory commands can be pushed to remote station control devices, which are often referred to as field devices. Field devices control local operations such as opening and closing valves and breakers, collecting data from sensor systems, and monitoring the local environment for alarm conditions
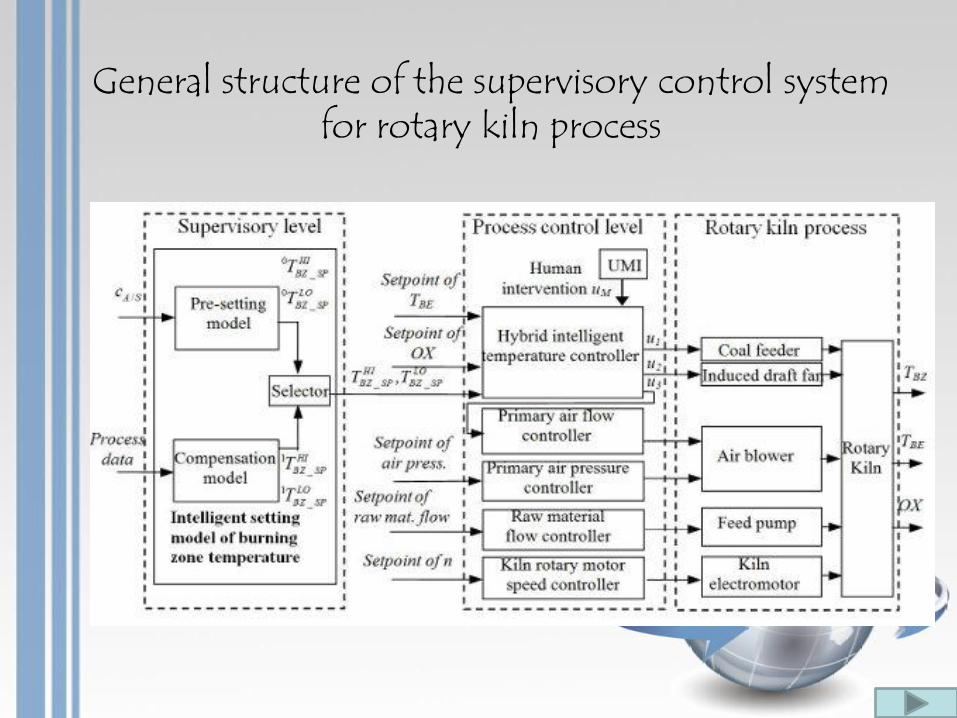
General structure of the supervisory control system for rotary kiln process
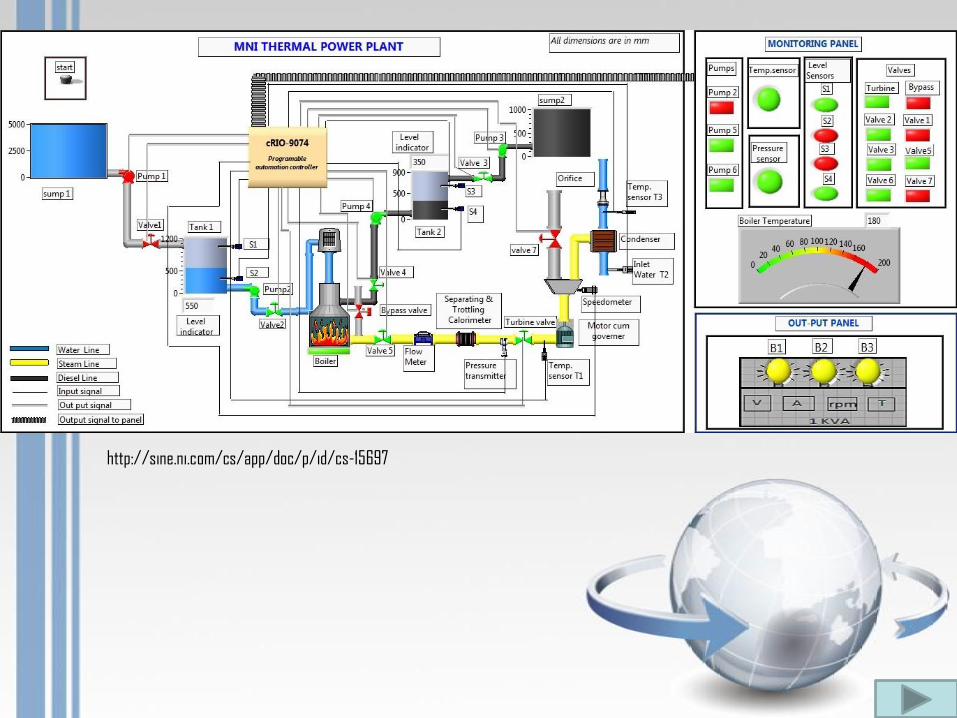
http://sine.ni.com/cs/app/doc/p/id/cs-15697

Improved control is a key enabling technology underpinning:• enhanced product quality • waste minimization • environmental protection • greater throughput for a given installed capacity • greater yield • deferring costly plant upgrades, and • higher safety margins
Peran Sistem Kendali Dalam Industri
Integrasi Sistem
Success in control engineering depends on taking a holistic viewpoint. Some of the issues are:
• plant, i.e. the process to be controlled • objectives • sensors • actuators • communications • computing • architectures and interfacing • algorithms • accounting for disturbances and uncertainty

Better ControlProvides more finesse by combining sensors and
actuators in more intelligent ways
Better Actuators
Better Sensors
Better
Communations
Better Understanding
of plant
Better Computing

Future evolution ofcontrol systems and robotics

Metode Desain Kendali
• PID• Optimal Control• Robust Control• Adaptive Control• Model Predictive Control• etc

Flexible Manufacturing SystemA flexible manufacturing system (FMS) is a manufacturing system in which there is some amount of flexibility that allows the system to react in case of changes, whether predicted or unpredicted.
An Industrial Flexible Manufacturing System (FMS) consists of robots, Computer-controlled Machines, Numerical controlled machines (CNC), instrumentation devices, computers, sensors, and other stand alone systems such as inspection machines.
Related Documents











