Keypoint descriptor matching with context-based orientation estimation F. Bellavia a,* , D. Tegolo b , C. Valenti b a CVG, Universit`a degli Studi di Firenze, 50139 Firenze, Italy b DMI, Universit`a degli Studi di Palermo, 90123 Palermo, Italy Abstract This paper presents a matching strategy to improve the discriminative power of histogram-based keypoint descriptors by constraining the range of allow- able dominant orientations according to the context of the scene under ob- servation. This can be done when the descriptor uses a circular grid and quantized orientation steps, by computing or providing a global reference orientation based on the feature matches. The proposed matching strategy is compared with the standard approaches used with the SIFT and GLOH descriptors and the recent rotation invariant MROGH and LIOP descriptors. A new evaluation protocol based on an ap- proximated overlap error is presented to provide an effective analysis in the case of non-planar scenes, thus extending the current state-of-the-art results. Keywords: image descriptors, local features, dominant orientation, rotation invariance, keypoint matching, SIFT, LIOP, MROGH. * Corresponding author Email addresses: [email protected] (F. Bellavia), [email protected] (D. Tegolo), [email protected] (C. Valenti) Preprint submitted to Image and Vision Computing May 27, 2014

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Keypoint descriptor matching with
context-based orientation estimation
F. Bellaviaa,∗, D. Tegolob, C. Valentib
aCVG, Universita degli Studi di Firenze, 50139 Firenze, ItalybDMI, Universita degli Studi di Palermo, 90123 Palermo, Italy
Abstract
This paper presents a matching strategy to improve the discriminative power
of histogram-based keypoint descriptors by constraining the range of allow-
able dominant orientations according to the context of the scene under ob-
servation. This can be done when the descriptor uses a circular grid and
quantized orientation steps, by computing or providing a global reference
orientation based on the feature matches.
The proposed matching strategy is compared with the standard approaches
used with the SIFT and GLOH descriptors and the recent rotation invariant
MROGH and LIOP descriptors. A new evaluation protocol based on an ap-
proximated overlap error is presented to provide an effective analysis in the
case of non-planar scenes, thus extending the current state-of-the-art results.
Keywords: image descriptors, local features, dominant orientation,
rotation invariance, keypoint matching, SIFT, LIOP, MROGH.
∗Corresponding authorEmail addresses: [email protected] (F. Bellavia),
[email protected] (D. Tegolo), [email protected] (C. Valenti)
Preprint submitted to Image and Vision Computing May 27, 2014
1. Introduction1
Keypoint extracted from digital images have been adopted with good2
results as primitive parts in many computer vision tasks, such as recogni-3
tion [1], tracking [2] and 3D reconstruction [3]. The detection and extraction4
of meaningful image regions, named keypoints or image features, is usually5
the first step of these methodologies. Numerical vectors that embody the6
image region properties are successively computed to compare the keypoints7
found according to the particular task.8
Different feature detectors have been proposed during the last decades9
invariant to affine transformations or scale and rotation only, including, but10
not limited to, corners and blobs. The reader may refer to [4] for a general11
overview.12
After the keypoint is located, a meaningful descriptor vector to embody13
the characteristic properties of the keypoint support region (i.e. its neigh-14
bourhood) is computed. Different descriptors have been developed, which15
can be divided mainly into two categories: distribution-based descriptors16
and banks of filters. In general, while the former give better results, the17
latter provide more compact descriptors. Banks of filters include complex18
filters, color moments, the local jet of the keypoint, differential operators19
and Haar wavelet coefficients. Refer to [5] for more details.20
Distribution-based descriptors, also named histogram-based descriptors,21
divide the keypoint region, also called feature patch, into different areas22
and compute specific histograms related to some image properties for each23
area. The final descriptor is given by the ordered concatenation of these24
histograms. The rank and the census transforms [6], which consider binary25
2
comparisons of the intensity of central pixel against its neighborhood, are the26
precursors of the histogram-based descriptors. In particular, the CS-LBP [7]27
descriptor can be considered an extension of this kind of approach. The spin28
image descriptor, the shape context and the geometric blur and the more29
recent DAISY, BRIEF, BRISK and FREAK descriptors (see [5, 8]) should30
be mentioned.31
One of the most popular descriptors based on histograms is surely the32
SIFT (Scale Invariant Feature Transform) [9], which is a 3D histogram of33
gradient orientations on a Cartesian grid. SIFT has been extended in vari-34
ous ways since its first introduction. The PCA-SIFT descriptor [10] increases35
the robustness of the descriptor and decreases its length by applying PCA36
(Principal Component Analysis), RIFT (Rotation Invariant Feature Trans-37
form) [11] is a ring-based rotational invariant version, while GLOH (Gradient38
Local Orientation Histogram) [5] combines a log-polar grid with PCA and39
SURF [12] is an efficient discrete SIFT variant. Recently, RootSIFT [13]40
improves upon SIFT by replacing the Euclidean distance with the Bhat-41
tacharyya distance after the normalization of the descriptor vector with the42
Manhattan norm instead of the conventional Euclidean norm. Overlapping43
regions using multiple support regions combined by intensity order pooling44
are used by MROGH (Multi Support Region Order Based Gradient His-45
togram) [14]. Furthermore, LIOP (Local Intensity Order Pattern) [15] uses46
the intensity order pooling and the relative order of neighbor pixels to define47
the histogram.48
Over the last few years, machine learning techniques have been applied49
to remove the correlation between the descriptor elements and to reduce the50
3
dimension [10, 16], as well as, different histogram distances to improve the51
matches [17, 18].52
Different methodologies for evaluating feature descriptors and detectors53
have been proposed [4, 5, 8, 16, 19–23]. In the case of planar images, the54
Oxford dataset benchmark [4, 24] is a well-established set of de facto stan-55
dard, although an extension to non-planar images is not immediate [19].56
Other evaluation methodologies use laser-scanner images [21] or structure57
from motion algorithms [16, 23] or epipolar reprojection on more than two58
images [20], but in general they require a complex and error prone setup.59
1.1. Our Contributions60
This paper presents in Section 2 a matching strategy to improve the61
discriminative power of histogram-based keypoint descriptors by constraining62
the range of allowable orientations according to the scene context.63
We build the proposed matching strategy on the sGLOH (shifting GLOH)64
descriptor described in Section 2, presented in our previous work [25]. It uses65
a circular grid to embed more descriptor instances with different dominant66
discrete orientations of the same feature patch into a single feature vector.67
Each descriptor instance is accessible by an internal shift of the feature vector68
elements without the need to recompute the histograms. The matching dis-69
tance between features is modified to consider the minimum distance among70
all descriptor instances for the possible dominant discrete orientations.71
The sGLOH design can be used to further constrain the allowable domi-72
nant discrete orientations to be considered in the matching distance. A finer73
selection of the range of the dominant discrete orientations to be considered74
can be done a priori by defining a very fast matching strategy, named sCOr75
4
(shifting Constrained Orientation) or alternatively, when no further informa-76
tion is given in advance, by using an adaptive distance measure according77
to a voting strategy to get the sGOr (shifting Global Orientation) matching78
(see Section 2).79
In order to assess the properties of the novel matching strategies, different80
experiments reported in Section 3 were carried out, both on planar and non-81
planar scenes. To provide more insights, we also evaluated the case when82
more than just the first dominant orientation is used in SIFT and GLOH.83
The rotational invariant MROGH [14] and LIOP [15] were also included in the84
evaluation due to the increasing interest towards them in recent works [8, 14].85
In the case of non-planar scenes, a novel dataset was created which86
employs a new evaluation protocol based on the approximated overlap er-87
ror [26, 27]. This evaluation protocol provides an effective analysis in the case88
of non-planar scenes, extending the current state-of-the-art results [20, 22].89
Section 4 reports final comments and conclusions.90
2. The Proposed Matching Strategy91
Patch normalization and orientation methods are presented before defin-92
ing the keypoint matching with sCOr and sGOr, as well as details on the93
sGLOH descriptor [25], which is essential in the matching pipeline since it94
allows constraints on the range of allowable orientations.95
2.1. Patch Normalization96
Given an image I(x), x ∈ R2, the feature patch must be normalized97
before the computation of the descriptor vector. In the general case of affine-98
invariant keypoint detectors, which usually represent a good trade-off be-99
5
tween transformation invariance and discriminative power, an elliptical re-100
gion R ⊂ I is extracted. If the ellipse is given by the equation xTΣ−1x = 1,101
considering the keypoint centre as coordinate origin, the patch is normal-102
ized to a circle of a fixed radius r according to the formula x′ = rAx, where103
A = D−12 RT with Σ = RDRT by the eigenvalue decomposition [5]. The ellipse104
axis lengths and orientations are given by the square root of the eigenval-105
ues and the corresponding eigenvectors of Σ respectively [5]. The symmetric106
matrix Σ ∈ R2×2 is obtained as the covariance matrix for some quantity107
φ(x) ∈ R2 related to the points of the patch R [4]. This is the gradient108
vector in the case of the Harris detector or the coordinates of the boundary109
points for the MSER detector [4].110
The affine illumination invariance is obtained by normalizing the inten-111
sity value I(x) of the points inside the region R through their mean µ and112
standard deviation σ, according to the formula I ′(x) = I(x)−µσ
.113
2.2. Finding the Patch Orientation114
In order to be rotational invariant, most of the histogram-based descrip-115
tors have to be rotated according to a reference dominant orientation and116
different methodologies have been designed for its computation [9, 12, 28–30].117
The common approach was proposed by Lowe [9], where the gradient118
∇I(x) = [dx, dy]T is computed for each point x ∈ R and a histogram of ori-119
entations θ∇I(x) = arctan(dy/dx) is built up. The contribution of each point120
x is given by its gradient magnitude ‖ ∇I(x) ‖, weighted by the Gaussian121
function122
gσ(x) =1
2πσ2e−‖x‖2
2σ2
6
with standard deviation σ. It is assumed that θv = arctan(v), i.e. the123
arctangent of a generic vector v ∈ R2, and the coordinate origins coincide124
with the centre xc of the feature patch. The orientation Θ of the highest125
peak in the histogram, interpolated by a parabolic fitting, is chosen as the126
dominant orientation. More dominant orientations can be assigned to the127
feature, by retaining other peaks above 80% of the highest peak [9].128
Histogram-based descriptors which do not require a dominant orientation129
have also been proposed [14, 15]. The underlying idea, first exploited by130
RIFT [11], consists in the use of the outside direction perpendicular to the131
tangent direction at each point as reference in the bin assignment. This is132
however not sufficient, because patch regions have to be made invariant to133
rotation, too. The RIFT descriptor uses concentric rings which are clearly134
rotational invariant, but less discriminative.135
A last approach, named intensity order pooling [14], defines regions ac-136
cording the intensity value of the feature patch points without spatial con-137
strains, i.e. points with similar intensity values belong to the same region.138
This approach is used by MROGH [14], which computes a gradient histogram139
as for RIFT, and by LIOP [15], where instead the bins represent the rela-140
tive order of the intensities in a neighbourhood of the point. Furthermore,141
MROGH uses multiple support regions, which result in overlapping regions.142
According to [8], both LIOP and MROGH seem to outperform recent state-143
of-the-art descriptors, at least in the case of the Oxford planar scenes. How-144
ever, it must be noted that the MROGH outer support region is 2.5 times145
bigger than the standard elliptic region employed by other descriptors [14]146
in the tests, which lead to better but distorted results, especially in the case147
7

of planar scenes. See the additional material for more details.148
The sGLOH approach [25] uses the RIFT reference orientation for bin149
assignment, but a circular grid is maintained instead of concentric rings. The150
descriptor instances for different dominant discrete orientations obtained by151
shifting the descriptor vector are compared during the matching step and the152
best one is selected. Even if this approach is not a novelty [31], it had never153
been extended and evaluated in the context of histogram-based descriptors.154
Note that a similar descriptor, named RIFF, was introduced by Takacs et155
al. [32], contemporaneously to our preliminary paper concerning sGLOH [25].156
2.3. The sGLOH Descriptor157
The sGLOH descriptor grid is made up of n ×m regions Rr,d with r =158
{0, 1, . . . , n− 1} and d = {0, 1, . . . ,m− 1}, defined by n − 1 circular rings159
centred on the keypoint, plus one small inner circle, all of them containing160
m sectors, equally distributed along m directions (see Fig. 1). Previous161
experiments [25] have shown that not dividing the inner circular region into162
sectors decreases the discriminative power of the descriptor.163
For each region Rr,d, the histogram of m quantized orientations weighted164
by the gradient magnitude is computed. In order to obtain a better estima-165
tion of the gradient distribution, instead of using the trilinear interpolation166
as in SIFT [9], the bin value hi, where i = 0, 1, . . .,m − 1, is computed by167
the Gaussian kernel density estimation for each region168
hir,d =1√2πσ
∑x∈Rr,d
‖ ∇I(x) ‖ e−(M2π(θ∇I(x)−mi))
2
2σ2
where ‖ ∇I(x) ‖ and θ∇I(x) are respectively the gradient magnitude and169
8

Figure 1: Rotation of an image patch with the superimposed sGLOH grid by
a factor 2πm
(left), which corresponds to a cyclic shift of the block histogram
for each ring (right) and for inner circle. In the example r = 2 and d = 4
(best viewed in color)
orientation of a pixel x ∈ Rr,d; mi = 2πmi is the i-th orientation bin centre170
and σ = 2πmc, with c ∈ R+, is the standard deviation in quantized orientation171
bin units. The function M2π(x) is used to take into account a periodicity of172
length 2π173
M2π(x) =
x if x < π
2π − x otherwise
In modular arithmetic, [d + i]m shifts cyclically by d positions the i-th174
element of a m dimensional vector, given the relation a ≡ bmodm, where175
the congruence class is represented by [a]m. We define a block histogram176
Hr,d =m−1⊕i=0
h[d+i]mr,d ,
where⊕
is the concatenation operator, so that the first bin of each block177
9

has direction d. The final descriptor vector H is obtained by concatenating178
the histograms179
H =n−1⊕i=0
m−1⊕j=0
Hi,j
The length of H = [h1, h2, . . . , hl] is l = m2n. In order to be more tolerant180
to noise and errors, the descriptor vector H is normalized to the unit length181
on the L1 norm instead of the usual normalization through the L2 norm [18].182
Moreover, no threshold is applied [9] (e.g. 0.2 for SIFT) to saturate values183
greater than a given quantity. The values hi are quantized to q levels to184
reduce the total descriptor to b = l log2 q bits [9]. The final descriptor is then185
H? = bwHc where w = q/l∑
i=1
hi. To avoid a complex notation, H will refer186
to both H and H? if it is not specified.187
The rotation of the descriptor by a factor αk, where α = 2πm
, is obtained188
by a cyclic shift of the block histogram for each ring and for the inner circle,189
without recomputing the descriptor vector (see Fig. 1)190
Hαk =n−1⊕i=0
m−1⊕j=0
Hi,[k+j]m
In this sense, the sGLOH descriptor packs m different descriptors of the191
same patch with different dominant orientations. The distance between two192
features H and H is then given by193
D(H,H) = mink=0,...,m−1
D(H,Hαk) (1)
where D(·, ·) is a generic distance measure.194
10
2.4. The sGLOH Implementation Details195
Experimental tests were carried out [25] on the Oxford dataset by using196
the setup described by Mikolajczyk and Schmid [5] in order to find the best197
parameter settings for sGLOH. We found that n = 2 and m = 8, which198
imply that the descriptor dimension is l = 128 and the discrete orientation199
step is 45◦, provide the best compromise between the descriptor length and200
its discriminative power. Moreover, the patch radii of the circular grid are201
set to 12 and 20 so that the patch size is 41× 41.202
For Gaussian kernel density estimation, the standard deviation in bin203
units is set to c = 0.7 and the quantization levels are set to q = 512 as204
for the Mikolajczyk’s SIFT implementation [24]. The normalization of the205
sGLOH vector to L2 unit length with a successive saturation threshold of 0.2206
has been shown to decrease its discriminative power [25]. Furthermore, no207
additional smoothness on the normalized and bilinear interpolated patches208
according to the scale to remove high frequencies is needed by sGLOH.209
2.5. The sCOr and sGOr Matching210
Both sCOr and sGOr reduce the number of wrong matches of sGLOH,211
as all wrong matches outside the correct range of discrete orientations are212
discarded and cannot be selected by chance.213
In the sCOr approach the range of the allowable orientations to be checked214
is constrained up to the first clockwise and counterclockwise discrete rotations215
only, given an a priori fixed reference orientation f ∈ {0, 1, . . . ,m − 1}, i.e.216
k = [f − 1]m, f, [f + 1]m in equation 1. Although the range of sCOr applica-217
tions is limited since high degrees of rotations cannot be handled, the method218
11

is general enough to be employed by setting f = 0 in common practical ap-219
plications, such as SLAM [2] and sparse matching [3], since transformations220
are relatively continuous for close images. Moreover, scenes and objects are221
usually acquired roughly with the same orientations so that this issue can222
be often neglected in the general case, since sCOr handles rotations of up223
to ±67.5◦ (see the experimental section). Note also that sCOr decreases the224
time required for the distance computation with respect to sGLOH.225
The sGOr approach uses the information provided by the scene context226
to provide a global reference orientation, under the reasonable assumption227
that all keypoints of the scene undergo roughly the same approximated dis-228
crete rotation αg, not known a priori. The range of discrete orientations in229
equation 1 is modified to k = [g−1]m, g, [g+1]m, where g ∈ {0, 1, . . . ,m−1}230
can be estimated according to the most probable relative orientation among231
all matches.232
Given two images I1 and I2, the relative orientation k?(H,S) of the best233
match pair containing the feature H and any other feature in the other image234
is considered235
k?(H,S) = ( arg mink=0,1,...,m−1
H∈S
D(H,Hαk))`
where (k,H)` = k and S is the set of feature vectors from the image not236
containing H. We define the histogram of the relative orientations so that237
the bin zk counts the number of the best matches with relative discrete238
orientation αk239
12

zk =∑H1∈S1
t(k = [k?(H1, S2)]m) +∑H2∈S2
t(k = [−k?(H2, S1)]m)
where t(W ) is 0, 1 if W is false, true respectively. S1 and S2 are the sets of240
descriptor vectors associated to features belonging to the images I1 and I2241
respectively. The value of g is finally given by242
g = arg maxk=0,1,...,m−1
zk
We experimentally verified that, consistently to the definition of g, wrong243
matches are distributed uniformly across the bins zk while correct matches244
are distributed according to a Gaussian centred in zg. The computation of245
g is similar to the Hough voting scheme [33] and, with respect to sGLOH, it246
just adds a minimal amount of computation to evaluate the distance D (see247
equation 1), since all required values of D have been computed already.248
3. Experimental Evaluation249
In order to evaluate the proposed matching approaches, comparisons with250
SIFT, GLOH, LIOP, MROGH and the original sGLOH were carried out,251
both in the planar and non-planar cases. The HarrisZ detector [34] which252
selects robust and stable Harris corners in the affine scale-space was used.253
Previous evaluations [34] have shown that it is comparable with the state-of-254
the-art detectors and provides better keypoints than Harris-affine. Moreover,255
although descriptors are influenced by detectors, the relative performances256
of the descriptors among different detectors are consistent [14].257
13

In the planar case, precision/recall curves on correct matches were ex-258
tracted through the overlap error ε for the stereo pairs (I1, I2) in the Oxford259
dataset [24]260
ε(Rw,Rz) = 1− Rw
⋂T2→1(Rz)
Rw
⋃T2→1(Rz)
where Rw ∈ I1, Rz ∈ I2 and T2→1 is the function that reprojects the feature261
Rz from I2 to I1.262
Detectors were also considered in the case of 2D planar rotations, to un-263
derline the effects of the dominant orientation on descriptors and the benefits264
of the rotation invariant descriptors. For the non-planar case, a novel super-265
vised evaluation strategy was adopted. An approximated overlap error εq,266
given a ground-truth fundamental matrix, was extracted according to the267
methodology described in [26, 27], which is based on the epipolar geometry268
and tangency relations. Finally, the time complexity of the descriptors is269
discussed.270
3.1. Planar Images271
As considered in [5], the support region of each keypoint was increased272
by a factor of 3 and normalized to a 41× 41 pixel patch.273
The Mikolajczyk’s GLOH and SIFT implementations were adapted to be274
used with multiple dominant orientations [9], in order to provide a reference275
with previous evaluations [24]. In particular, we considered the case when276
peaks greater by a factor of 0.8 and 0.7 of the maximum peak in the histogram277
of gradient orientations are retained. Differently from Lowe’s implementa-278
tion, these use finer bins, so that the number of descriptors associated to each279
14
keypoint doubles instead of increasing by 15% only [9]. However, as shown280
in the next section, results improve as more peaks were considered, so that281
the number of correct matches obtained by our implementations represent282
an upper bound to Lowe’s original implementation. When multiple domi-283
nant orientations were considered, similarly to sGLOH, the distance between284
two keypoints was computed as the minimum distance among all the pos-285
sible descriptor vectors associated to them. The implementations of LIOP286
and MROGH, provided by respective authors were used, while the code of287
sGLOH, sCOr and sGOr can be downloaded from [35]. The MROGH outer288
support region is 2.5 times bigger than the standard elliptic region employed289
by other descriptor by design [14], so that better results are expected for290
this descriptor since more discriminative data are available. Nevertheless,291
MROGH results were also included as an upper bound to analyze the allow-292
able gain that can be introduced in SIFT-like descriptors by using of a bigger293
feature area. Moreover, note that while the descriptor vector dimension is294
128 for SIFT, GLOH and sGLOH, it is 144 and 192 for LIOP and MROGH,295
respectively.296
The Oxford dataset [24] used in this evaluation contains planar images di-297
vided in two categories: structured images, containing homogeneous regions298
with well defined borders, and textured images. Eight different scenes are299
presented, each one subject to a different transformation across the images:300
viewpoint change, scale and orientation change, blur, lossy compression and301
luminosity. As in [5], the first and the fourth images for each scene were302
used.303
Precision/recall curves for a fixed overlap error ε = 50% were extracted304
15
for increasing distance values by using NN (Nearest-Neighbor) and NNR305
(Nearest-Neighbor Ratio) [9] matching criteria with L1 or Manhattan dis-306
tance and the L2 or Euclidean distance. The more rapidly the precision/recall307
curve grows and becomes stable with high recall, the better the descriptor308
is [5].309
Finally, 2D rotations were tested by artificially rotating 16 different im-310
ages, each by a step of 3◦ until 90◦, to get a quantitative evaluation about the311
possible drawbacks due to a wrong estimation of the dominant orientation312
and to show the tolerance which can be achieved by descriptors under small313
orientations.314
Relatively small rotations are more interesting in common applications315
because objects are almost always depicted in their frontal position. Fur-316
thermore, in 3D cases such as structure from motion [3] or SLAM [2], small317
rotations can aid to approximate admissible perspective distortions. To get318
an extensive analysis in the case of small rotations, the upright SIFT and319
GLOH descriptors, i.e. with no dominant orientation computation, named320
as uSIFT and uGLOH respectively, were included in this test.321
Note that uSIFT, uGLOH and sCOr were not tested on the Oxford322
dataset, since rotation sequences contain high degree rotations, while scenes323
with non-geometric transformations do not contain any rotation. In the for-324
mer case they could not be correctly applied while in the latter case the325
comparison would be unfair.326
Plots in Fig. 2 show precision/recall curves with the best matching strat-327
egy for each descriptor, i.e. L1 distance with NN for sGLOH and sGOr and328
L1 distance with NNR for other descriptors. Results in terms of correct329
16
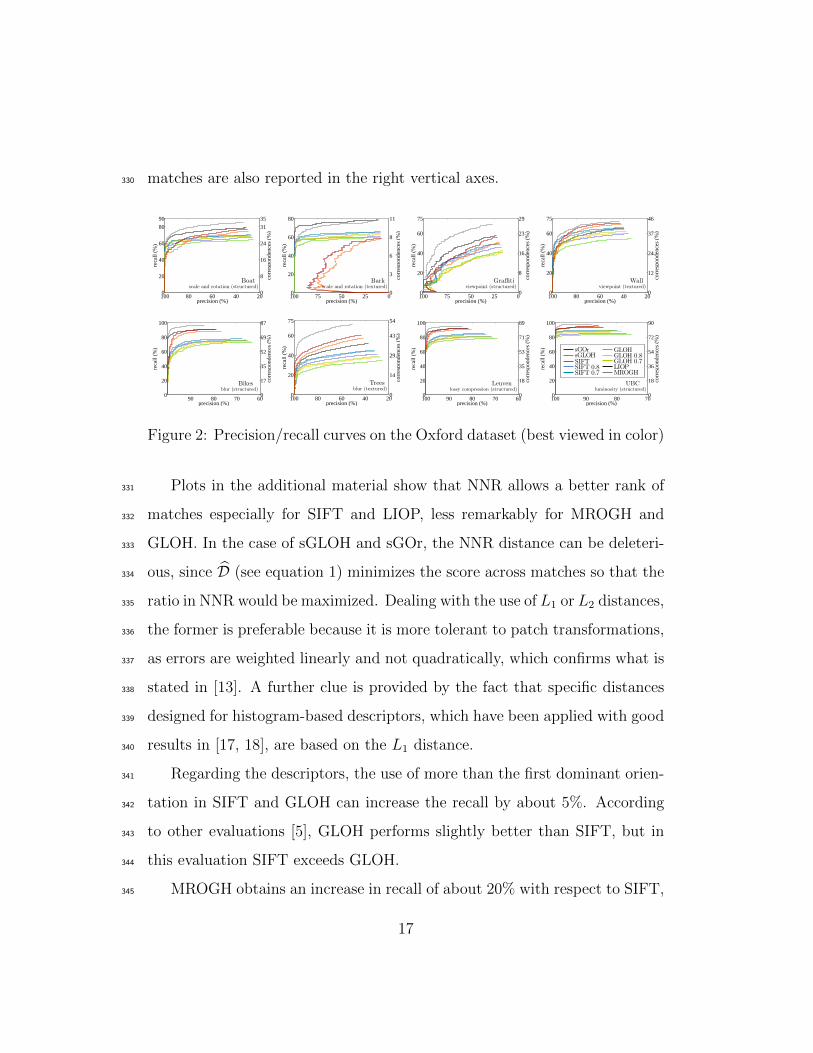
matches are also reported in the right vertical axes.330
204060801000
20
40
60
80
90
precision (%)
reca
ll (%
)
scale and rotation (structured)Boat
0
8
16
24
31
35
corr
espo
nden
ces
(%)
02550751000
20
40
60
80
precision (%)
reca
ll (%
)scale and rotation (textured)
Bark
0
3
6
8
11
corr
espo
nden
ces
(%)
02550751000
20
40
60
75
precision (%)
reca
ll (%
)
viewpoint (structured)Graffiti
0
8
16
23
29
corr
espo
nden
ces
(%)
204060801000
20
40
60
75
precision (%)
reca
ll (%
)
viewpoint (textured)Wall
0
12
24
37
46
corr
espo
nden
ces
(%)
607080900
20
40
60
80
100
precision (%)
reca
ll (%
)
blur (structured)Bikes
0
17
35
52
69
87
corr
espo
nden
ces
(%)
204060801000
20
40
60
75
precision (%)
reca
ll (%
)
blur (textured)Trees
0
14
29
43
54
corr
espo
nden
ces
(%)
607080901000
20
40
60
80
100
precision (%)
reca
ll (%
)
lossy compression (structured)Leuven
0
18
35
53
71
89
corr
espo
nden
ces
(%)
7080901000
20
40
60
80
100
precision (%)
reca
ll (%
)
luminosity (structured)UBC
0
18
36
54
72
90
corr
espo
nden
ces
(%)
Figure 2: Precision/recall curves on the Oxford dataset (best viewed in color)
Plots in the additional material show that NNR allows a better rank of331
matches especially for SIFT and LIOP, less remarkably for MROGH and332
GLOH. In the case of sGLOH and sGOr, the NNR distance can be deleteri-333
ous, since D (see equation 1) minimizes the score across matches so that the334
ratio in NNR would be maximized. Dealing with the use of L1 or L2 distances,335
the former is preferable because it is more tolerant to patch transformations,336
as errors are weighted linearly and not quadratically, which confirms what is337
stated in [13]. A further clue is provided by the fact that specific distances338
designed for histogram-based descriptors, which have been applied with good339
results in [17, 18], are based on the L1 distance.340
Regarding the descriptors, the use of more than the first dominant orien-341
tation in SIFT and GLOH can increase the recall by about 5%. According342
to other evaluations [5], GLOH performs slightly better than SIFT, but in343
this evaluation SIFT exceeds GLOH.344
MROGH obtains an increase in recall of about 20% with respect to SIFT,345
17
which shows the robustness of the new rotational invariant descriptor. Except346
for the textured scale and rotation cases in the Bark sequence, it achieves347
the best results. However, a bigger support region is used, the vector length348
is 50% more than the standard 128 descriptor length and it requires more349
computational time (see Sect. 3.3).350
LIOP provides about 10-15% increase in recall, it is fast and increases351
the descriptor length by 13% only. Apart from the textured Bark sequence352
(see Fig. 2b), for which it achieves the best results, LIOP works better for353
structured scenes than for textured scenes. This implies that the relative354
ordering of pixel intensities is more stable for well defined and homogeneous355
patches.356
The sGOr results are better than sGLOH, which demonstrates the effec-357
tiveness of the adaptive distance in constraining the range of discrete rota-358
tions. Except for Bark, sGOr results are in general quite similar to those359
obtained by LIOP, but sGOr works better with textured scenes. Further-360
more, sGLOH always surpasses the results obtained by SIFT and GLOH for361
a precision which is less than 90%.362
By inspecting the results in the case of no geometrical transformation363
(e.g. for the sequences Bikes, Trees, UBC and Leuven) it can be noted that364
the computation of the dominant orientation could lead to wrong matches.365
If no dominant orientation is used for SIFT and GLOH, results similar to366
other descriptors should be expected. Usually this information is not known367
a priori and needs to be explicitly included for SIFT and GLOH, while it368
is automatically addressed and handled by MROGH, LIOP, sGLOH and369
sGOr. Furthermore, larger support regions in the case of MROGH improve370
18
the results since more detailed feature patches are available.371
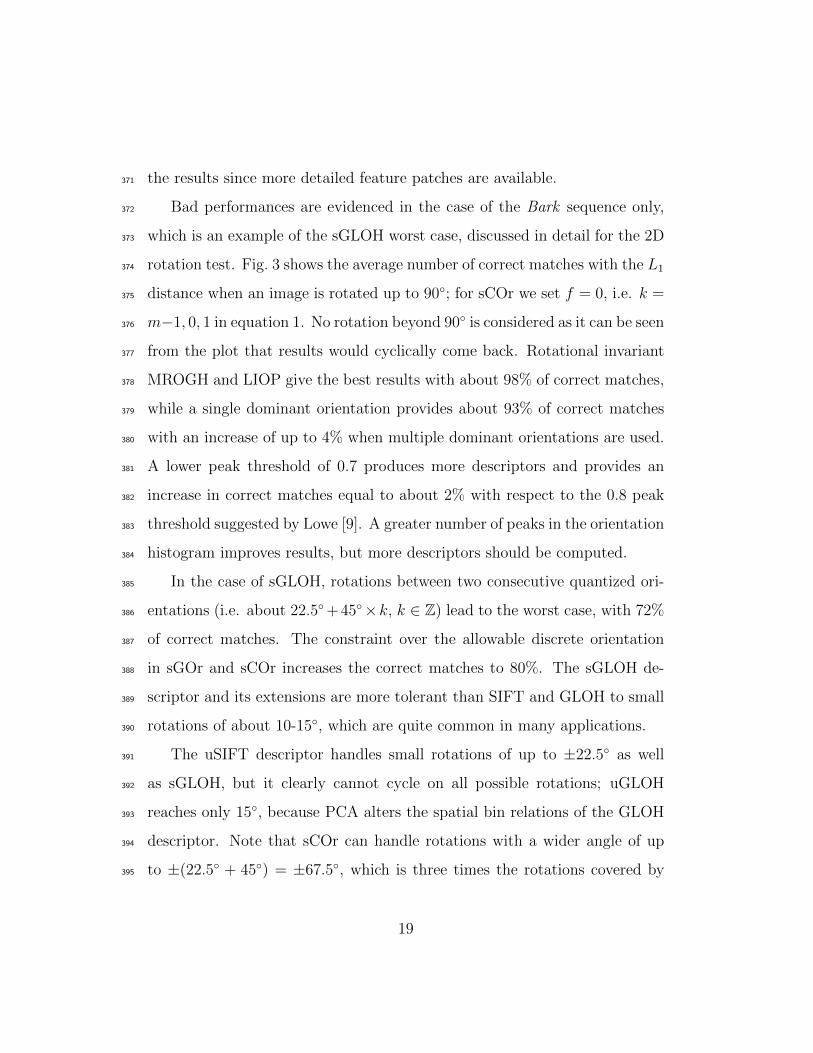
Bad performances are evidenced in the case of the Bark sequence only,372
which is an example of the sGLOH worst case, discussed in detail for the 2D373
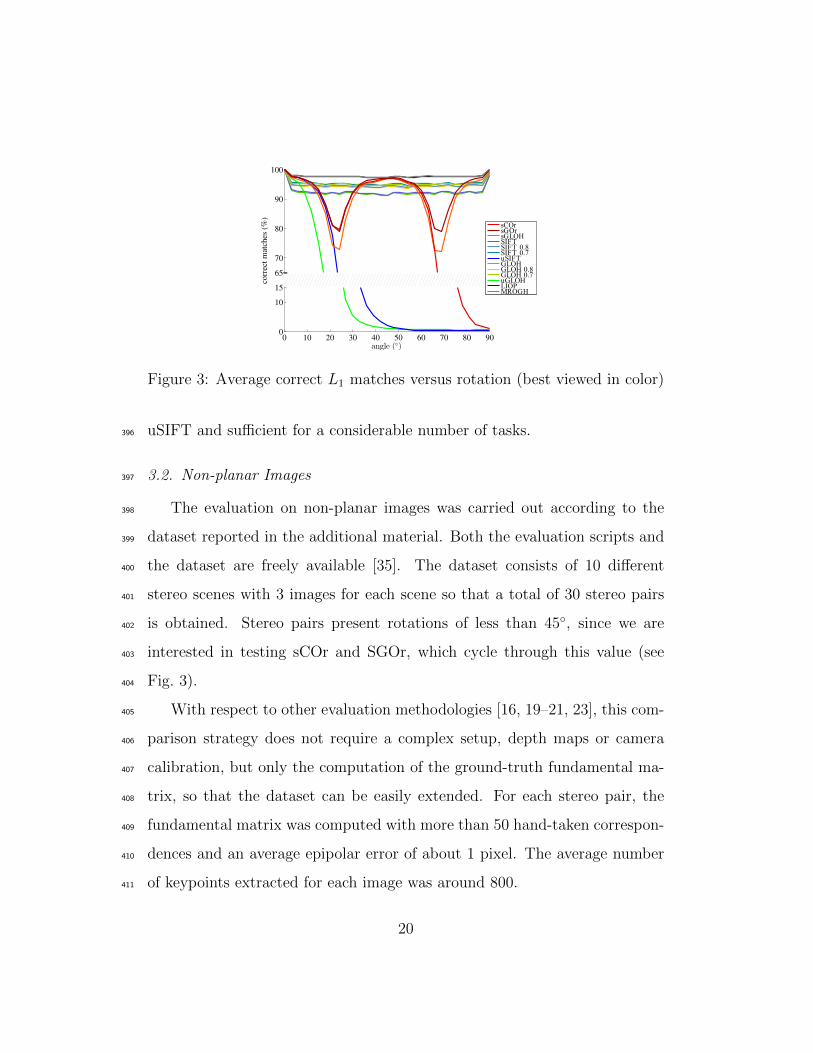
rotation test. Fig. 3 shows the average number of correct matches with the L1374
distance when an image is rotated up to 90◦; for sCOr we set f = 0, i.e. k =375
m−1, 0, 1 in equation 1. No rotation beyond 90◦ is considered as it can be seen376
from the plot that results would cyclically come back. Rotational invariant377
MROGH and LIOP give the best results with about 98% of correct matches,378
while a single dominant orientation provides about 93% of correct matches379
with an increase of up to 4% when multiple dominant orientations are used.380
A lower peak threshold of 0.7 produces more descriptors and provides an381
increase in correct matches equal to about 2% with respect to the 0.8 peak382
threshold suggested by Lowe [9]. A greater number of peaks in the orientation383
histogram improves results, but more descriptors should be computed.384
In the case of sGLOH, rotations between two consecutive quantized ori-385
entations (i.e. about 22.5◦+45◦×k, k ∈ Z) lead to the worst case, with 72%386
of correct matches. The constraint over the allowable discrete orientation387
in sGOr and sCOr increases the correct matches to 80%. The sGLOH de-388
scriptor and its extensions are more tolerant than SIFT and GLOH to small389
rotations of about 10-15◦, which are quite common in many applications.390
The uSIFT descriptor handles small rotations of up to ±22.5◦ as well391
as sGLOH, but it clearly cannot cycle on all possible rotations; uGLOH392
reaches only 15◦, because PCA alters the spatial bin relations of the GLOH393
descriptor. Note that sCOr can handle rotations with a wider angle of up394
to ±(22.5◦ + 45◦) = ±67.5◦, which is three times the rotations covered by395
19
sCOrsGOrsGLOHSIFTSIFT 0.8SIFT 0.7uSIFTGLOHGLOH 0.8GLOH 0.7uGLOHLIOPMROGH
Figure 3: Average correct L1 matches versus rotation (best viewed in color)
uSIFT and sufficient for a considerable number of tasks.396
3.2. Non-planar Images397
The evaluation on non-planar images was carried out according to the398
dataset reported in the additional material. Both the evaluation scripts and399
the dataset are freely available [35]. The dataset consists of 10 different400
stereo scenes with 3 images for each scene so that a total of 30 stereo pairs401
is obtained. Stereo pairs present rotations of less than 45◦, since we are402
interested in testing sCOr and SGOr, which cycle through this value (see403
Fig. 3).404
With respect to other evaluation methodologies [16, 19–21, 23], this com-405
parison strategy does not require a complex setup, depth maps or camera406
calibration, but only the computation of the ground-truth fundamental ma-407
trix, so that the dataset can be easily extended. For each stereo pair, the408
fundamental matrix was computed with more than 50 hand-taken correspon-409
dences and an average epipolar error of about 1 pixel. The average number410
of keypoints extracted for each image was around 800.411
20

Figure 4: Linear overlap error εl (best viewed in color)
The approximated overlap error εq [26] was applied to unify the compari-412
son framework of non-planar scenes to the more common planar case without413
any complex schema [16, 19, 23], taking into account the feature shape and414
not only the keypoint centre, considered through the epipolar distance by415
Moreels and Perona [20].416
The approximated overlap error εq extends to surfaces the linear overlap417
error εl introduced by Forseen and Lowe [22], which is briefly described for418
the sake of clarity (see Fig. 4). The tangency relation between epipoles and419
feature ellipses is preserved by perspective projection (blue), because it is420
an incidence relation. By intersecting the line through the tangent points421
with the epipolar lines (yellow) of the corresponding tangent points on the422
respective ellipse in the other image, we obtain the configuration described423
in Fig. 4. The linear overlap error εl is given by the ratio between the small424
(azure) and the wider (red) segments.425
We proposed an extension [26, 27] to the linear overlap error measure426
εl, by observing that for computing a ground-truth fundamental matrix, not427
only the correspondence between epipoles is available, but also the fixed428
correspondences (k, s) provided by the hand-taken points, k, s ∈ R2. The429
measure εq is an overlap between a planar approximation of the surfaces in-430
21

side the feature patches. The assumption that the scene can be approximated431
by piecewise planar patches was already used successfully to train and test432
features in [16].433
Figure 5: Approximated overlap error εq (best viewed in color)
For an ellipse patchR (orange), tangent points define an inscribed quadri-434
lateral Q? (azure), while tangent lines limit a circumscribed quadrilateral Q435
(blue), as in Fig. 5. The corresponding quadrilaterals P ? (light green) and P436
(dark green) are obtained by projecting from the other images through the437
fundamental matrix as done for εl. The area of the ellipse R can be roughly438
approximated by the average area between Q and Q?439
R ≈ Q+Q?
2
The final approximate overlap error εq is defined as440
εq =ε(Q,P ) + ε(Q?, P ?)
2
The measure εq is not symmetric so the maximal value obtained for the441
ordered stereo pairs (I1, I2) and (I2, I1) is assigned to the match. In the442
22
computation, the best pair (k, s) of correspondences is considered according443
to the heuristic constrains described in [27].444
A match is considered correct with respect to a given threshold value tε445
if εq < tεq . As tεq decreases, the precision increases in same way as in the446
framework by Moreels and Perona [20] and, as for all the methodologies based447
on a ground-truth fundamental matrix, the precision loss depends on the448
transformation applied to the scene, as well as, the uncertainty of the feature449
point on the epipolar line. In particular, wrong matches sharing the same450
epipolar cone can be misclassified. However, this is a stronger constraint than451
to take only into consideration the epipolar distance of the feature center.452
In order to deal with this issue, the error εq was first computed for the453
candidate matches and an initial selection of matches was done automatically454
by thresholding with tεq < 1, removing all matches with no overlap according455
to εq. The reduced subset of matches was then manually refined and only456
the remaining matches with an approximated overlap error less than the457
threshold tεq < 0.5 were retained. This final set of correct matches was used458
in the evaluation as ground-truth.459
In the case of no user inspection, we verified an average error rate equal460
to about 5% without the high recall loss due to the use of three images [20].461
This error rate is sufficiently low and would not alter the results in the case462
of no manual interaction [27].463
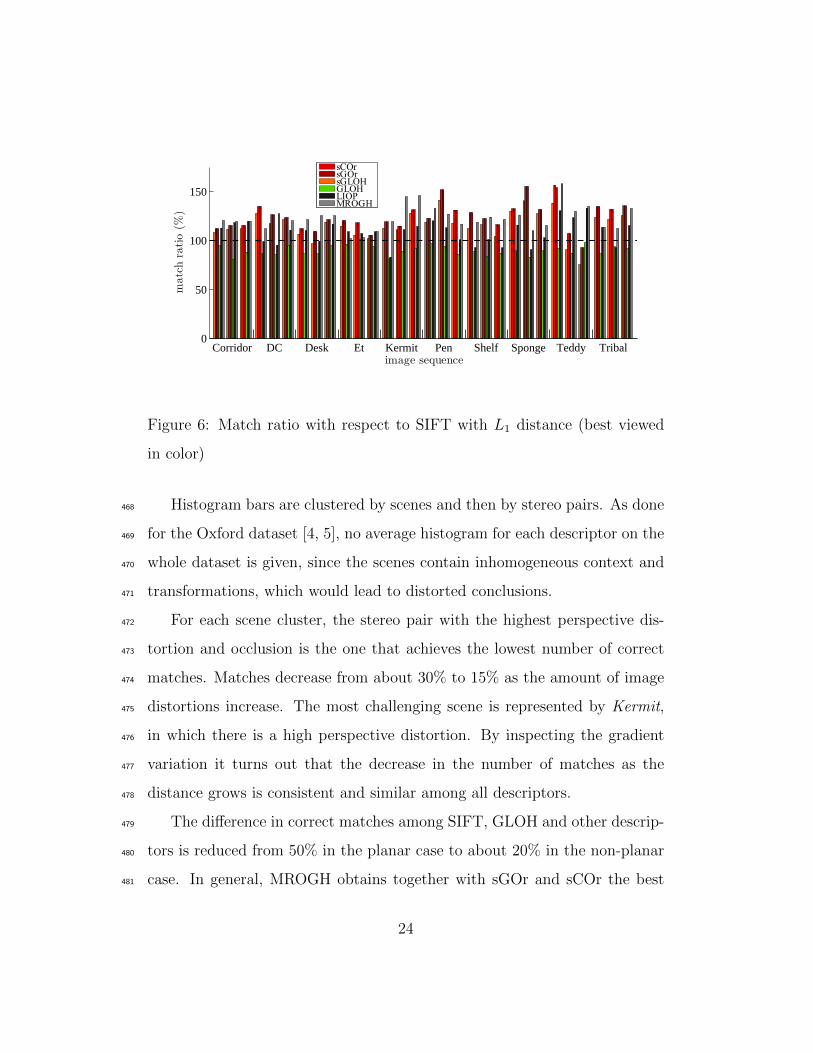
Fig. 6 shows the correct matches for each stereo pair and descriptor,464
considering SIFT as the reference descriptor. Further plots can be found in465
the additional material. The matching strategy and the distance used are466
the same as for the planar test, since the same considerations hold.467
23
Corridor DC Desk Et Kermit Pen Shelf Sponge Teddy Tribal0
50
100
150
image sequence
matchratio(%
)sCOrsGOrsGLOHGLOHLIOPMROGH
Figure 6: Match ratio with respect to SIFT with L1 distance (best viewed
in color)
Histogram bars are clustered by scenes and then by stereo pairs. As done468
for the Oxford dataset [4, 5], no average histogram for each descriptor on the469
whole dataset is given, since the scenes contain inhomogeneous context and470
transformations, which would lead to distorted conclusions.471
For each scene cluster, the stereo pair with the highest perspective dis-472
tortion and occlusion is the one that achieves the lowest number of correct473
matches. Matches decrease from about 30% to 15% as the amount of image474
distortions increase. The most challenging scene is represented by Kermit,475
in which there is a high perspective distortion. By inspecting the gradient476
variation it turns out that the decrease in the number of matches as the477
distance grows is consistent and similar among all descriptors.478
The difference in correct matches among SIFT, GLOH and other descrip-479
tors is reduced from 50% in the planar case to about 20% in the non-planar480
case. In general, MROGH obtains together with sGOr and sCOr the best481
24

results, but none of these approaches clearly outperform the others. The482
advantage of using a bigger support region in the case of non-planar scenes is483
reduced, since bigger patches can introduce also more distortions with respect484
to the planar case, according to the concept of locality of the features [5].485
LIOP improvements over SIFT are more limited than the planar case and486
in some cases obtains a lower number of matches for some image pairs, so487
that the local relative order of pixel intensity seems to suffer due to image488
discontinuities associated with perspective distortions in non-planar images.489
Regarding GLOH, the same considerations obtained for the planar case490
still hold, while the number of matches for sGLOH is greater than SIFT but491
slightly lower than MROGH, sGOr and sCOr. The benefits of sGOr and492
sCOr over sGLOH are more evident than those obtained in the planar case.493
Rotations of the form ±22.5◦ + 45◦ × k, k ∈ Z, correspond to the worst494
case of sGLOH (the third image pair of Teddy). As for the planar case, this495
issue can be alleviated by focusing on an admissible number of quantized496
orientations to remove ambiguities, as done by sGOr and sCOr which return497
similar results to SIFT.498
Table 1 shows the percentage p of correct matches detected by sCOr along499
the orientation of 0◦ so that 1 − p corresponds to the percentage of correct500
matches detected along the orientation of ±45◦, since discrete rotations are501
limited to up to this value. The following weighted average provides a rough502
estimate of the average orientation of the scene503
r(p) = p× 0◦ + (1− p)× 45◦
neglecting the clockwise or counterclockwise direction of the rotation. The504
25

Table 1: Discrete orientation at 0◦ for sCOr correct matches and uSIFT/sCOr
ratio
Sequence Corridor Dc Desk Shelf Sponge
sCOr matches at 0◦ (%) 100 100 100 99 90 99 99 96 100 21 94 88 99 98 99
uSIFT/sCOr (%) 107 95 99 94 95 100 105 94 104 29 102 89 102 90 99
Sequence Et Kermit Pen Teddy Tribal
sCOr matches at 0◦ (%) 100 80 99 65 35 92 99 100 98 6 74 50 95 99 100
uSIFT/sCOr (%) 102 87 97 58 58 94 99 97 91 8 87 74 99 98 98
ratio of uSIFT correct matches with respect to sCOr is also reported, as505
for Fig. 6. It can be noted that some image pairs in the Kermit, Shelf506
and Teddy sequences (bold values) have rotations of about ±22.5◦ or more507
(see Table 1). While uSIFT would provide better results than SIFT and508
similar ones to sGLOH, sGOr, sCOr, LIOP and MROGH for small rotations,509
its performance degrades for these image pairs. Furthermore, the need to510
decide whether to consider the dominant orientation is present for the SIFT511
and GLOH descriptors only, while it is automatically handled by the other512
descriptors. Even in the case of relatively small rotations, sCOr should be513
preferred to uSIFT, as a wider range of rotations could be handled.514
Moreover, results of sCOr and sGOr are the same for all except the first515
sequences in Shelf and Teddy, showing that the computation of the relative516
average discrete orientation by sGOr is effective. Results differ with these517
two scenes because the average rotation is fixed a priori to 0◦ for sCOr, while518
sGOr detects g = 7 (see equation 2.5) that implies a rotation of −45◦, as519
expected by Table 1 and by observing the input images.520
As a last note, sGOr rotation estimation works even when a low number521
26
of correct matches are present so that the corresponding peak in the discrete522
relative rotation histogram (see Section 2.5) is very low, as for the second523
scene with Kermit which has about 10% of correct matches.524
3.3. Time Complexity525
The descriptor matching time depends on the average number n of ex-526
tracted keypoints for each stereo pair. Indeed, the total time required is527
given by the time to compute the descriptors on both images, which is O(n),528
plus the time to compute the distance for each possible match, which grows529
as O(n2). Here it is assumed that the computation of the distance between530
two descriptor requires a constant time and the descriptor length can be531
neglected.532
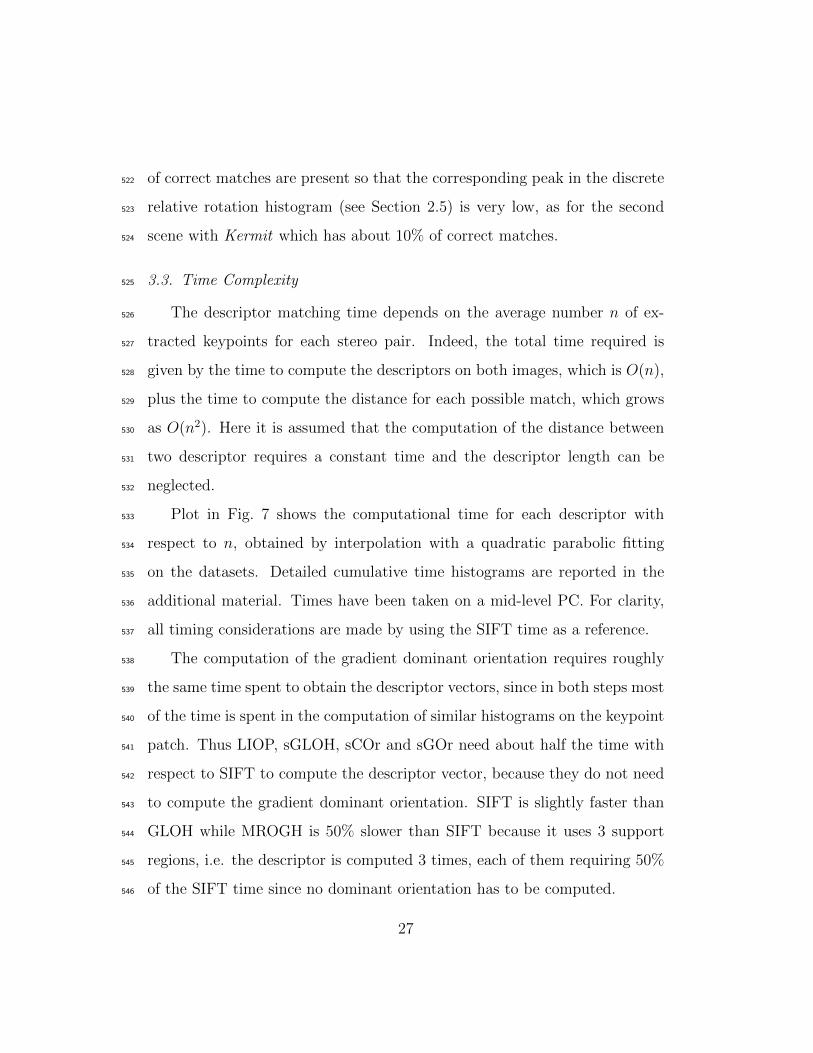
Plot in Fig. 7 shows the computational time for each descriptor with533
respect to n, obtained by interpolation with a quadratic parabolic fitting534
on the datasets. Detailed cumulative time histograms are reported in the535
additional material. Times have been taken on a mid-level PC. For clarity,536
all timing considerations are made by using the SIFT time as a reference.537
The computation of the gradient dominant orientation requires roughly538
the same time spent to obtain the descriptor vectors, since in both steps most539
of the time is spent in the computation of similar histograms on the keypoint540
patch. Thus LIOP, sGLOH, sCOr and sGOr need about half the time with541
respect to SIFT to compute the descriptor vector, because they do not need542
to compute the gradient dominant orientation. SIFT is slightly faster than543
GLOH while MROGH is 50% slower than SIFT because it uses 3 support544
regions, i.e. the descriptor is computed 3 times, each of them requiring 50%545
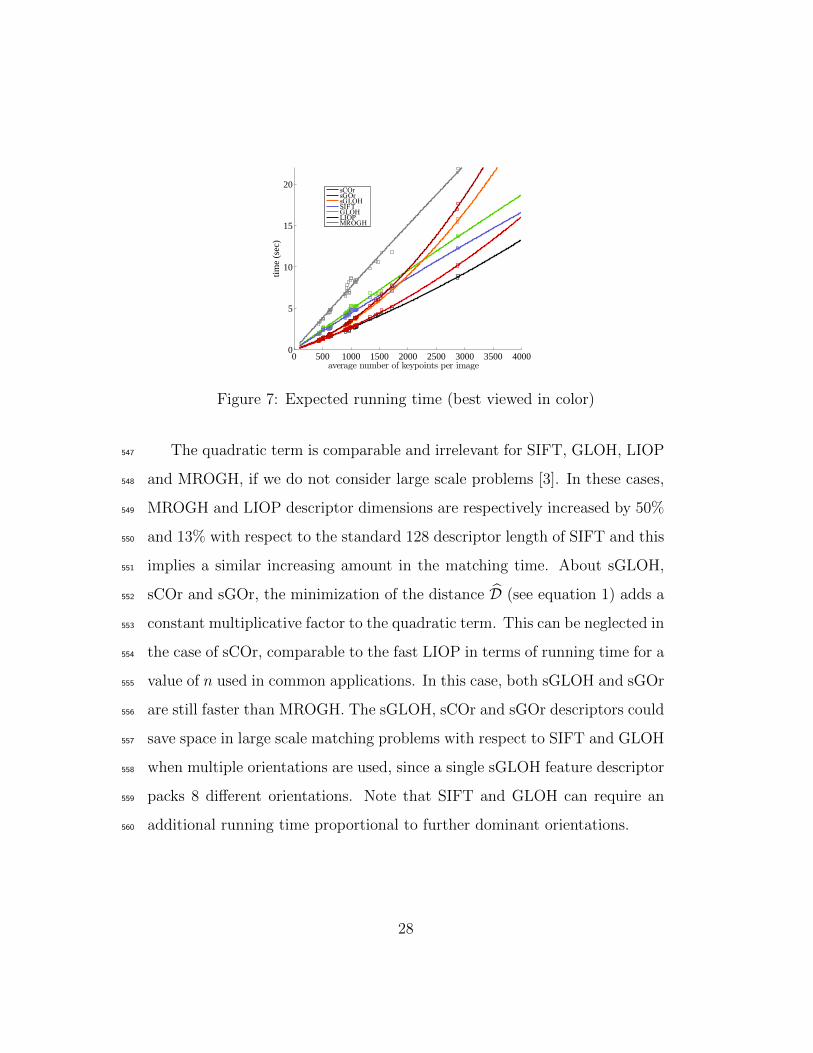
of the SIFT time since no dominant orientation has to be computed.546
27
0 500 1000 1500 2000 2500 3000 3500 40000
5
10
15
20
average number of keypoints per image
time
(sec
)
sCOrsGOrsGLOHSIFTGLOHLIOPMROGH
Figure 7: Expected running time (best viewed in color)
The quadratic term is comparable and irrelevant for SIFT, GLOH, LIOP547
and MROGH, if we do not consider large scale problems [3]. In these cases,548
MROGH and LIOP descriptor dimensions are respectively increased by 50%549
and 13% with respect to the standard 128 descriptor length of SIFT and this550
implies a similar increasing amount in the matching time. About sGLOH,551
sCOr and sGOr, the minimization of the distance D (see equation 1) adds a552
constant multiplicative factor to the quadratic term. This can be neglected in553
the case of sCOr, comparable to the fast LIOP in terms of running time for a554
value of n used in common applications. In this case, both sGLOH and sGOr555
are still faster than MROGH. The sGLOH, sCOr and sGOr descriptors could556
save space in large scale matching problems with respect to SIFT and GLOH557
when multiple orientations are used, since a single sGLOH feature descriptor558
packs 8 different orientations. Note that SIFT and GLOH can require an559
additional running time proportional to further dominant orientations.560
28
4. Conclusions561
In this paper we have shown how to improve the discriminative power of562
histogram-based keypoint descriptors by constraining the range of allowable563
orientations according to the scene under observation. This is done by com-564
puting a global gradient orientation based on the image matching context in565
the case of sGOr, or can be provided a priori in the case of sCOr.566
We tested the proposed descriptors together with SIFT, GLOH and recent567
rotation invariant descriptors by intensity order pooling, MROGH and LIOP,568
both on planar and non-planar images. In the former case the Oxford dataset569
was used, while in the latter case we proposed a novel supervised strategy,570
based on an approximated overlap error. This method allows to compare571
descriptors in the non-planar case in a similar way to the planar case, by572
taking into account the feature shape and not only the keypoint centre. The573
new evaluation strategy does not require any complex setup to extend the574
dataset and the error rate is sufficiently low not to alter the results in the575
case of unsupervised usage [27]. This new evaluation method adds a valuable576
tool to be joined with the current evaluation methods in order to provide a577
more insightful understanding of the descriptors.578
According to our tests, the L1 distance should be chosen, while NNR579
matching is preferable for most descriptors. All investigated descriptors are580
expected to degrade when passing from the planar to non-planar cases. None581
of the considered descriptors clearly outperforms the others, since results582
depend on the input scene and time and space requirements are different,583
that should be also taken into account.584
SIFT results as a good descriptor, while GLOH gives less correct matches585
29
in our tests. The rotational invariant LIOP descriptor is very fast, and586
achieves a higher number of matches with respect to SIFT, especially in the587
planar case. In non-planar scenes results are less stable, due to the inten-588
sity ordering used by LIOP, affected by eventual image discontinuities or in589
the presence of textured or noisy scenes. MROGH achieves the best results590
together with sGOr and sCOr, but it uses bigger support regions and also591
requires the highest computational time. The sGLOH descriptor returns592
good results on both planar and non-planar images with a time complex-593
ity comparable with SIFT in practical situations. The sGLOH descriptor594
is very tolerant to small rotations, but its results degrade for planar rota-595
tions between two quantized orientations, which limits its usability in general596
applications. The sCOr and the more general sGOr descriptors are very suit-597
able for non-planar scenes and can be applied to common tasks with results598
comparable to MROGH and LIOP. Furthermore, sCOr and LIOP have a599
comparable running time while sGOr is faster than MROGH.600
Results achieved by sGOr, sCOr and sGLOH, considering their similar-601
ity with SIFT, underline how the reference orientation represents a possible602
drawback in the matching process. In the case of small rotations, this issue603
can be removed by uSIFT. However, the need to use the dominant orienta-604
tion has to be explicitly included in SIFT or GLOH, which is automatically605
handled by the other descriptors. For this reason, the sCOr descriptor should606
be preferred to uSIFT, as a wider range of rotations can be handled.607
30
Acknowledgements608
This work was supported partially by grant B71J12001380001, University609
of Palermo FFR 2012/2013.610
References611
[1] S. Lazebnik, C. Schmid, J. Ponce, Beyond bags of features: spatial612
pyramid matching for recognizing natural scene categories, in: Proc.613
of the IEEE Conference on Computer Vision and Pattern Recognition,614
Vol. 2, 2006, pp. 2169–2178.615
[2] A. Gil, O. M. Mozos, M. Ballesta, O. Reinoso, A comparative evalua-616
tion of interest point detectors and local descriptors for visual SLAM,617
Machine Vision and Applications (MVA) 21 (6) (2010) 905–920.618
[3] N. Snavely, S. Seitz, R. Szeliski, Modeling the world from internet photo619
collections, International Journal of Computer Vision 80 (2) (2008) 189–620
210.621
[4] K. Mikolajczyk, T. Tuytelaars, C. Schmid, A. Zisserman, J. Matas,622
F. Schaffalitzky, T. Kadir, L. Van Gool, A comparison of affine region623
detectors, International Journal of Computer Vision 65 (1-2) (2005) 43–624
72.625
[5] K. Mikolajczyk, C. Schmid, A performance evaluation of local descrip-626
tors, IEEE Transactions on Pattern Analysis and Machine Intelligence627
27 (10) (2005) 1615–1630.628
31
[6] R. Zabih, J. Woodfill, Non-parametric local transforms for computing629
visual correspondence, in: Proc. of the European Conference on Com-630
puter Vision, Vol. 2, 1994, pp. 151–158.631
[7] M. Heikkila, M. Pietikainen, C. Schmid, Description of interest regions632
with local binary patterns, Pattern Recognition 42 (3) (2009) 425–436.633
[8] O. Miksik, K. Mikolajczyk, Evaluation of local detectors and descriptors634
for fast feature matching, in: Proc. of the International Conference on635
Pattern Recognition, 2012, pp. 2681–2684.636
[9] D. Lowe, Distinctive image features from scale-invariant keypoints, In-637
ternational Journal of Computer Vision 60 (2) (2004) 91–110.638
[10] Y. Ke, R. Sukthankar, PCA-SIFT: a more distinctive representation for639
local image descriptors, in: Proc. of the IEEE Conference on Computer640
Vision and Pattern Recognition, Vol. 2, 2004, pp. 506–513.641
[11] S. Lazebnik, C. Schmid, J. Ponce, A sparse texture representation using642
local affine regions, IEEE Transactions on Pattern Analysis and Machine643
Intelligence 27 (8) (2005) 1265–1278.644
[12] H. Bay, A. Ess, T. Tuytelaars, L.Van Gool, Speeded-up robust features645
(SURF), Computer Vision and Image Understanding 110 (3) (2008) 346–646
359.647
[13] R. Arandjelovic, A. Zisserman, Three things everyone should know to648
improve object retrieval, in: Proc. of the IEEE Conference on Computer649
Vision and Pattern Recognition, 2012, pp. 2911–2918.650
32
[14] B. Fan, F. Wu, Z. Hu, Rotationally invariant descriptors us-651
ing intensity order pooling, IEEE Transactions on Pattern652
Analysis and Machine Intelligence 34 (10) (2012) 2031–2045,653
http://vision.ia.ac.cn/Students/bfan/mrogh.htm.654
[15] Z. Wang, B. Fan, F. Wu, Local intensity order pattern655
for feature description, in: Proc. of the IEEE Interna-656
tional Conference on Computer Vision, 2011, pp. 603–610,657
http://vision.ia.ac.cn/Students/wzh/publication/liop/index.html.658
[16] M. Brown, G. Hua, S. Winder, Discriminative learning of local image659
descriptors, IEEE Transactions on Pattern Analysis and Machine Intel-660
ligence 33 (1) (2011) 43–57.661
[17] Y. Rubner, C. Tomasi, L. Guibas, The earth mover’s distance as a metric662
for image retrieval, Tech. rep., Stanford University (1998).663
[18] H. Ling, K. Okada, Diffusion distance for histogram comparison, in:664
Proc. of the IEEE Conference on Computer Vision and Pattern Recog-665
nition, 2006, pp. 246–253.666
[19] F. Fraundorfer, H. Bischof, A novel performance evaluation method of667
local detectors on non-planar scenes, in: Proc. of the IEEE Conference668
on Computer Vision and Pattern Recognition, 2005, pp. 33–33.669
[20] P. Moreels, P. Perona, Evaluation of features detectors and descriptors670
based on 3D objects, International Journal of Computer Vision 73 (2007)671
263–284.672
33
[21] C. Strecha, W. von Hansen, L. Van Gool, P. Fua, U. Thoennessen, On673
benchmarking camera calibration and multi-view stereo for high resolu-674
tion imagery, in: Proc. of the Computer Vision and Pattern Recognition,675
2008, pp. 2838–2845.676
[22] P. Forssen, D. Lowe, Shape descriptors for maximally stable extremal677
regions, in: Proc. of the International Conference on Computer Vision,678
2007, pp. 1–8.679
[23] R. Lakemond, C. Fookes, S. Sridharan, Evaluation of two-view geometry680
methods with automatic ground-truth generation, Image Vision Com-681
puting 31 (12) (2013) 921–934.682
[24] K. Mikolajczyk, T. Tuytelaars, et al., Affine covariant features,683
http://www.robots.ox.ac.uk/~vgg/research/affine (2010).684
[25] F. Bellavia, D. Tegolo, E. Trucco, Improving SIFT-based descriptors sta-685
bility to rotations, in: Proc. of the International Conference on Pattern686
Recognition, 2010, pp. 3460–3463.687
[26] F. Bellavia, D. Tegolo, New error measures to evaluate features on three-688
dimensional scenes, in: Proc. of the International Conference on Image689
Analysis and Processing, 2011, pp. 524–533.690
[27] F. Bellavia, C. Valenti, C. A. Lupascu, D. Tegolo, Approximated overlap691
error for the evaluation of feature descriptors on 3D scenes, in: Proc. of692
the International Conference on Image Analysis and Processing, 2013,693
pp. 270–279.694
34
[28] S. Taylor, T. Drummond, Multiple target localisation at over 100 FPS,695
in: Proc. of the British Machine Vision Conference, 2009, pp. 58.1–58.11.696
[29] S. Gauglitz, M. Turk, T. Hollerer, Improving keypoint orientation as-697
signment, in: Proc. of the British Machine Vision Conference, 2011, pp.698
93.1–93.11.699
[30] M. Brown, R. Szeliski, S. Winder, Multi-image matching using multi-700
scale oriented patches, in: Proc. of the IEEE Conference on Computer701
Vision and Pattern Recognition, Vol. 1, 2005, pp. 510–517.702
[31] F. Ullah, S. Kaneko, Using orientation codes for rotation-invariant tem-703
plate matching, Pattern Recognition 37 (2) (2004) 201–209.704
[32] G. Takacs, V. Chandrasekhar, S. Tsai, D. Chen, R. Grzeszczuk,705
B. Girod, Unified real-time tracking and recognition with rotation-706
invariant fast features, in: Proc. of the IEEE Conference on Computer707
Vision and Pattern Recognition, 2010, pp. 934–941.708
[33] D. H. Ballard, Generalizing the Hough transform to detect arbitrary709
shapes, Pattern Recognition 13 (2) (1981) 111–122.710
[34] F. Bellavia, D. Tegolo, C. Valenti, Improving Harris corner selection711
strategy, IET Computer Vision 5 (2) (2011) 86–96.712
[35] http://www.math.unipa.it/fbellavia/htm/research.html.713
35
Related Documents











