K. Mease 10/11/06 1 Mechanical & Aerospace Engineering Henry Samueli School of Engineering University of California, Irvine K. D. Mease Professor SAE Aerospace Control and Guidance Systems Committee Williamsburg, Virginia October 11, 2006

K. Mease 10/11/06 1 Mechanical & Aerospace Engineering Henry Samueli School of Engineering University of California, Irvine K. D. Mease Professor SAE Aerospace.
Dec 27, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

K. Mease 10/11/061
Mechanical & Aerospace Engineering
Henry Samueli School of EngineeringUniversity of California, Irvine
K. D. MeaseProfessor
SAE Aerospace Control and Guidance Systems CommitteeWilliamsburg, Virginia
October 11, 2006

K. Mease 10/11/062
UCI Mechanical & Aerospace Engineering
21 Faculty, 4 Adjunct460 Undergraduate students100 Graduate students

K. Mease 10/11/063
Aerospace Program of Excellence
• 1 Guidance, Navigation and Control assistant professor hired last year
• Recruiting for 4 new aerospace faculty
– 2 Structures
– 1 Space Power and Propulsion
– 1 Space Systems

K. Mease 10/11/064
Research and Educational Activities of K. Mease
Research Projects:
• Model Decomposition for Multiple Time-Scale Nonlinear Dynamical Systems (NSF)
• Entry Guidance for Mars Landing (JPL)• Flight Control via Internal Moving Mass (Optimal Synthesis, MDA)
Undergraduate Design Project: UCI Rocket Project (25 students)
K-12 Outreach: COSMOS summer program (25 students)
Classroom Teaching:
Undergrad: Dynamics and Control of Flight Vehicles
Grad: Applied Math, Optimal Control, Nonlinear Control

K. Mease 10/11/065
Vehicle Control via Moving Mass
K. Mease 10/11/066
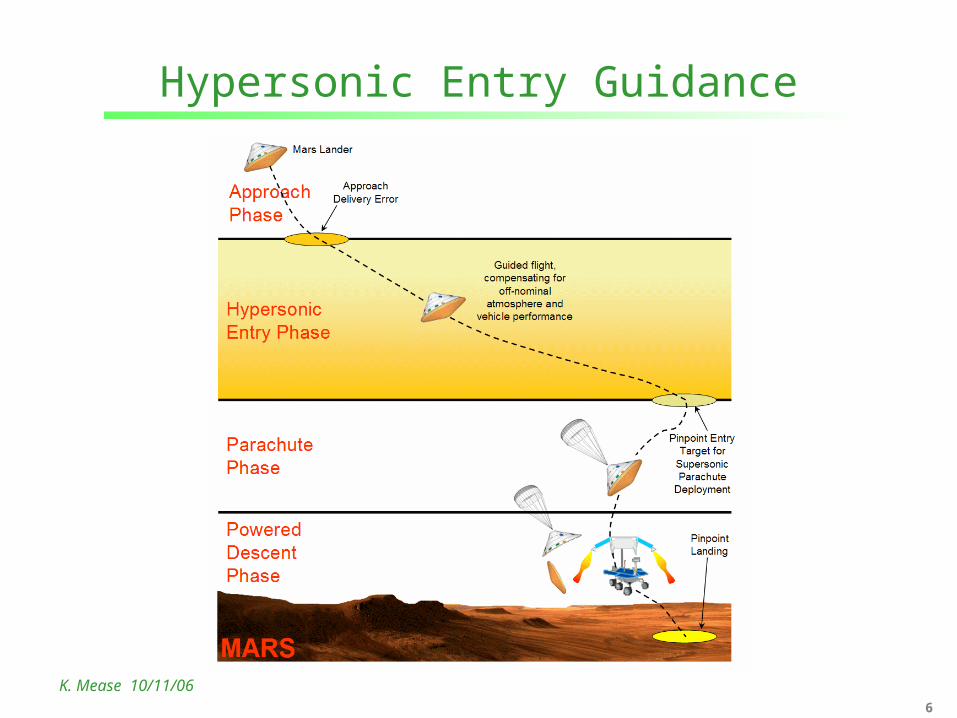
Hypersonic Entry Guidance

K. Mease 10/11/067
Hypersonic Entry Guidance Advances
Motivation:
• Reduce 3D position error at supersonic decelerator deployment point
• Accommodate broader class of landers relative to MSL baseline guidance
– Angle of attack modulation
– Higher L/D
– Active path constraints (heating, g-load, dynamic pressure)
• Increase levels of adaptability, mission flexibility and on-board autonomy
Benefits:
• Pinpoint delivery to parachute deployment
• Reduce propellant required for pinpoint landing
• Establish mature guidance approach for larger range of landers
Ellipsled L/D 0.3 – 0.8MSL type lander L/D 0.18 – 0. 25
Human Mission

K. Mease 10/11/068
Improved Chute Deploy Position Control
• Developed “position
guidance” – Switch from drag-based
hypersonic guidance to position guidance to improve parachute deployment position control
– Vertical as well as horizontal position control at chute deploy is important
– Enables higher elevation landing sites and reduces propellant req’ts. for pinpoint landing terminal descent
300 350 400 450 500
4000
6000
8000
10000
12000
14000
Velocity, m/s
Alti
tude
, m
300 350 400 450 500
4000
6000
8000
10000
12000
14000
Velocity, m/s
Alti
tude
, m
Before
After

K. Mease 10/11/069
UCI Rocket Project

K. Mease 10/11/0610
UCI Rocket Project

K. Mease 10/11/0611
UCI Rocket Flight Data, Sept. 9, 2006

K. Mease 10/11/0612
COSMOS
• COSMOS = California State Summer School for Mathematics & Science. Advisory Board Chair: Gayle Wilson, former 1st Lady of CA
• 4 week summer residential academic experience for top CA high school students in math and science
• Mission statement: “… motivate the most creative minds of the new generation of prospective scientists, engineers and mathematicians …”
• Programs at UCI, UCSD, UCD, UCSC• UCI Mechanical and Aerospace Engineering Cluster
2003, 2004, 2006. Lectures and labs. Design, build, fly R/C airplanes.
Related Documents