
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript


KATA PENGANTAR
Jurnal Matematika merupakan jurnal yang memuat hasil penelitian mahasiswa, dosen ataupenelit dalam bidang matematika dan statistika atau yang berhubungan dengan kedua bidangtersebut. Jurnal Matematika terbit setahun dua kali dan desember 2012 merupakan terbitanpertama. Pada penerbitan yang pertama,kedua dan ketiga ini, jurnal matematika memuat artikelmahasiswa yang merupakan bagian dari skripsi mahasiswa. Oleh karena itu, pada penerbitanselanjutnya redaksi mengharapkan dapat menerima artikel dari hasil penelitian dosen dan peneliti.
Besar harapan kami semoga Jurnal atematika ini dapat menjadi sarana komonikasi yangefektif untuk semua pihak yang berkepentingan dalam pengembangan ilmu pengetahuan khususnyailmu matematika dan ilmu statistika.

Dewan Redaksi
1.Ketua Dewan Redaksi : Dr. Miswanto,M.Si
2.Wakil Dewan Redaksi : Drs. Eko Tjahjono,M.Si
3.Anggota : Dr. Fatmawati,M.Si
: Sumilan

DAFTAR ISI
Lutfi AwaliatulMuqtadiroh, Fatmawati,Windarto
ANALISIS MODEL MATEMATIKAPENYEBARAN HIV/AIDS DENGANTAHAPAN LATEN YANG BERBEDA
1 - 9
Madya Vica Anggraini,Miswanto,Fatmawati
ANALISIS MODEL MATEMATIKAJUMLAH PEROKOK DENGANDINAMIKAAKAR KUADRAT
10 – 20
Novia Putri Pertiwi,Herry Suprajitno,Auli Damayanti
HYBRID ALGORITMA ARTIFICIALBEE COLONY DENGANMULTIPLE ONLOOKER (MO-ABC)DAN ALGORITMA HILL-CLIMBING (HC) UNTUKMENYELESAIKAN TRAVELINGSALESMAN PROBLEM (TSP)
21 - 29
Nur Ahmad Ricky R,Suliyanto,Toha Saifudin
ESTIMASI MODEL REGRESINONPARAMETRIKMENGGUNAKRADIALSMOOTHING BERDASARKANESTIMATORPENALIZED SPLINE
30 - 41
Nur Widyawati, Moh.Imam Utoyo, Windarto
SELESAIAN MODEL MATEMATIKAFRAKSIONAL MENGGUNAKANMETODEPERTURBASI HOMOTOPI PADASISTEM PREDASI TIGA SPESIES
42 - 50
Nuri Fashichah,Auli Damayanti,Herry Suprajitno
DETEKSI KELAINAN OTAK HASILMANETIC RESONANCE IMAGING(MRI) OTAKMENGGUNAKAN FIREFLYALGORITHM PADA PELATIHANJARINGAN RADIALBASIS FUNCTION
51 - 58
Nasrudin MB,Sediono,Eko Tjahjono
PENGGUNAAN METODE VALUE atRISK UNTUK MENENTUKANTINGKAT RESIKO INVESTASIPADA SAHAM PT GUDANGGARAMTbk MELALUI PENDEKATANMODEL INTEGRATEDGENERALIZEDAUTOREGRESSIVE CONDITIONALHETEROSCEDASTICITY (IGARCH)
59 - 76

Ramadhani Amulyo,Herry Suprajitno,Miswanto
Hybrid Virus Evolutionary GeneticAlgorithm (VEGA) danSimulated Annealing (SA) padaPenjadwalan Flowshop
77 - 85
Susan Hartanto,Moh. Imam Utoyo,Eridani
KETERBATASAN OPERATORINTEGRAL FRAKSIONAL PADARUANG MORREYKLASIK ATAS RUANG METRIK
86 - 92
Titik Didayanti,Fatmawati,Miswanto
ANALISIS MODEL PREDATOR-PREYDENGAN PEMANENAN SEBAGAIVARIABELKONTROL PADA PENANGKAPANIKAN DENGAN AREAKONSERVASI
93 - 101

ANALISIS MODEL MATEMATIKA PENYEBARAN HIV/AIDS DENGAN TAHAPAN
LATEN YANG BERBEDA
Lutfi Awaliatul Muqtadiroh, Fatmawati, Windarto
Departemen Matematika
Fakultas Sains dan Teknologi
Universitas Airlangga
Abstract. Acquired Immune Deficiency Syndrome (AIDS) is a disease caused by deficiency
of the human immune system. It is caused by Human Immunodeficiency Virus (HIV) infection.
HIV-infected person will be latent asymptomatic stages. Some chronic diseases, such as
tuberculosis and diabetes, can reduce the immune capacity. Therefore, an infected person with
some chronic diseases has shorter latent period. This thesis presents a mathematical model of
HIV/AIDS epidemic with different latent stages, consisting slow latent compartment and fast
latent compartment. In the model of HIV/AIDS epidemic with different latent stages, total
population is divided into five compartments, namely the susceptible compartment ( ), the slow
latent com-partment ( ), the fast latent compartment ( ), the symptomatic stage ( ) and a full-
blown AIDS group ( ). We have two equilibria, namely disease free equilibrium and endemic
equilibrium . The disease free equilibrium is locally asymptotically stable if , ,
and
. Based on the simulation result, the endemic equilibrium is locally
asymptotically stable and will be exist if . Based on sensitivity analysis, it is acquired that
transmission rate of the symptomatic stage ( ), recruitment rate of the population ( ) and
treatment rate of the symptomatic stage ( ) have significant influence on the threshold parameters
and .
Keywords : Mathematical model, HIV/AIDS, slow latent stage, fast latent stage,
stability, sensitivity.
1. Pendahuluan
Saat ini Human Immunodefiency Virus(HIV) masih menjadi masalah kesehatan yang
menimbulkan keprihatinan bagi seluruh masyarakat dunia. Sampai saat ini belum terdapat vaksin
pencegah HIV yang secara efektif mampu mencegah infeksi virus HIV yang menyerang sistem
imun (kekebalan). Pada tahun 2007, Acquired Immune Deficiency Syndrome (AIDS) adalah
penyebab utama kematian di Afrika dan penyebab keempat terkemuka kematian secara global.
Penularan virus HIV terjadi melalui kontak langsung antara membran mukosa atau aliran darah
dengan cairan tubuh yang mengandung HIV, seperti darah, sperma, cairan vagina, cairan
preseminal, dan ASI (Liu dan Wang, 2013). Penyakit HIV/AIDS telah menjadi pandemi yang
mengkhawatirkan masyarakat dunia, karena belum ditemukan obat dan vaksin pencegah
HIV/AIDS. Selain itu, HIV/AIDS juga memiliki “window period” (rentan waktu hingga HIV
menjadi positif) dan fase asimtomatik (tanpa gejala) yang relatif panjang dalam perjalanan
penyakitnya (Nursalam dan Kurniawati, 2007).
Ilmu matematika memberikan peranan penting untuk memahami dinamika penyebaran
penyakit dan menentukan strategi yang tepat untuk pengendalian penyebaran penyakit tersebut
menggunakan model matematika. Dinamika atau perilaku model dapat diamati dari kestabilan titik
setimbang model tersebut. Hal ini menunjukkan model matematika mempunyai peranan penting
dalam analisis kestabilan titik setimbang model penyebaran HIV/AIDS. Pada model matematika
penyebaran HIV/AIDS, periode tahapan infeksi berdasarkan perkembangan infeksi sebelum AIDS
dibedakan dalam tahapan tanpa gejala (asymptomatic stage) dan tahapan dengan gejala
(symptomatic stage). Penyakit kronis seperti tuberkulosis dan diabetes dapat mengurangi kapasitas
sistem kekebalan tubuh sehingga akan memiliki tahapan laten yang lebih pendek setelah terinfeksi
HIV. Individu tanpa penyakit kronis akan memiliki periode laten yang lebih lama dari pada
individu dengan penyakit kronis tersebut. Oleh karena itu, tahapan laten dapat dibagi menjadi dua
tahap, yaitu tahapan laten cepat dan tahapan laten lambat (Huo dan Feng, 2013).
Jurnal Matematika 20131

Berdasarkan permasalahan di atas, Penulis tertarik untuk mengkaji ulang model penyebaran
HIV/AIDS yang dikenalkan oleh Huo dan Feng pada tahun 2013. Dalam artikelnya, Huo dan Feng
menjelaskan bahwa populasi manusia dalam model terbagi menjadi lima sub populasi yaitu sub
populasi rentan, sub populasi terinfeksi HIV dengan tahapan laten lambat, sub populasi terinfeksi
HIV dengan tahapan laten cepat, sub populasi HIV positif dengan adanya gejala, dan sub populasi
AIDS. Selanjutnya Penulis akan mengkaji ulang model, kestabilan dan interpretasi dari model
tersebut.
2. HIV/AIDS
Menurut Soewondo (2002), Acquired Immune Deficiency Syndrome (AIDS) adalah
penyakit infeksi yang gejalanya mencerminkan defisiensi (kekurangan) imunitas seluler, akibat
infeksi retrovirus Human Immunodeficiency Virus (HIV), dengan gejala klinik berupa infeksi
oportunistik. Virus ini menyerang manusia lebih khususnya menyerang sistem kekebalan
(imunitas) tubuh, sehingga tubuh menjadi lemah dalam melawan infeksi. Dengan kata lain,
kehadiran virus HIV dalam tubuh akan menyebabkan defisiensi sistem imun.
HIV menyebabkan terjadinya penurunan kekebalan tubuh sehingga pasien rentan terhadap
serangan infeksi oportunistik. Antiretroviral (ARV) bisa diberikan pada pasien untuk
menghentikan aktivitas virus, memulihkan sistem imun dan mengurangi terjadinya infeksi
oportunistik, memperbaiki kualitas hidup, dan menurunkan kecacatan. ARV tidak menyembuhkan
pasien HIV, namun bisa memperbaiki kualitas hidup dan memperpanjang usia harapan hidup
penderita HIV/AIDS (Nursalam dan Kurniawati, 2007).
Tuberkulosis (TB) merupakan salah satu infeksi oportunistikyang potensial untuk penderita
HIV/AIDS, karena kondisi immunosupresif seluler yang terjadi pada penderita HIV/AIDS
mempermudah penyebaran infeksi TB primer. Sebaliknya infeksi Mycobacterium tuberculosis
pada penderita HIV akan mempercepat perjalanan infeksi HIV stadium dini menjadi stadium
lanjut (AIDS) yang fatal (Soewondo, 2002). Individu rentan yang mempunyai penyakit kronis
seperti tuberkulosis dan diabetes dapat mengurangi kapasitas sistem kekebalan tubuh sehingga
akan memiliki tahapan laten yang lebih pendek setelah terinfeksi HIV. Individu tanpa penyakit
kronis akan memiliki periode laten yang lebih lama dari pada individu dengan penyakit tersebut
(Huo dan Feng, 2013).
3. Analisis Kestabilan
Untuk menganalisis kestabilan dari suatu model matematika yang berbentuk nonlinier,
maka langkah awal yang dilakukan adalah mencari titik setimbang dari model tersebut. titik
setimbang dapat diperoleh dengan menggunakan ( ) dengan adalah titik setimbang dan
( )
adalah persamaan diferensial yang autonomous (Olsder, 2003). Setelah didapatkan
titik setimbang, selanjutnya dilakukan analisis kestabilan. Berikut diberikan beberapa definisi dan
teorema yang berhubungan dengan analisis kestabilan sistem linier:
Definisi 2.5 Matriks Jacobian dari sistem persamaan
( ) , ( ) ,
( ) ,
adalah
1 1 1
1 2
2 2 2
.1 2
1 2
y y y
x x xn
y y y
x x xJ n
y y yn n n
x x xn
((
(
(Kelley dan Peterson, 2010)
Jurnal Matematika 20132

Teorema 2.9 Sistem ( ) ( ) adalah stabil asimtotis jika dan hanya jika semua nilai eigen
dari , yaitu ( ) bernilai negatif atau mempunyai bagian real yang negatif.
(Zhou, 1996)
Pada permasalahan tertentu tanda bagian real dari nilai eigen tidak mudah ditentukan. Oleh
karena itu, perlu digunakan metode lain untuk menentukan tanda bagian real dari nilai eigen .
Untuk matriks yang berukuran tanda bagian real dari nilai eigen dapat ditentukan dengan
menggunakan kriteria Routh-Hurwitz, yaitu suatu metode untuk menunjukkan bahwa nilai eigen
bernilai negatif atau mempunyai bagian real yang negatif dengan memperhatikan koefisien dari
persamaan karakteristik tanpa menghitung akar-akar karakteristik secara langsung.
Misalkan diberikan persamaan karakteriktik yang berbentuk:
(6)
dengan adalah koefisien yang merupakan bilangan real, .
Dari persamaan karakteristik (6) tersebut, dapat diperoleh matriks Hurwitz ( ) yang
didefinisikan sebagai berikut :
( ) (
* (
+
(
)
untuk (gasal),
dan
(
)
untuk (genap),
dengan {
Teorema 2.10 (Kriteria Routh-Hurwitz) Akar-akar dari persamaan (2.1) bernilai negatif atau
mempunyai bagian real negatif jika dan hanya jika ( )
(Merkin, 1997)
4. Hasil dan Pembahasan
Berikut ini adalah model penyebaran HIV/AIDS dengan tahapan laten yang berbeda yang
terdiri dari lima kompartemen, yakni populasi rentan terhadap HIV ( ), populasi terinfeksi HIV
dengan tahapan laten lambat ( ), populasi terinfeksi HIV dengan tahapan laten cepat ( ), populasi
HIV positif dengan adanya gejala ( ) dan populasi AIDS ( ):
( ) (1)
(2)
( ) ( ) (3)
(4)
, (5)
dengan , , dan .
Persamaan (1) merepresentasikan laju perubahan populasi rentan terhadap HIV. Populasi
rentan terhadap HIV bertambah karena adanya kelahiran. Populasi ini berkurang karena adanya
Jurnal Matematika 20133

perkembangan ke tahapan populasi terinfeksi HIV dengan tahapan laten cepat dan ke tahapan
populasi terinfeksi HIV tahapan laten lambat, serta karena adanya kematian alami. Persamaan (2) merepresentasikan laju perubahan populasi terinfeksi HIV dengan tahapan
laten lambat. Populasi terinfeksi HIV dengan tahapan laten lambat bertambah karena adanya
populasi rentan yang berinteraksi dengan populasi terinfeksi HIV dengan tahapan laten cepat dan
populasi HIV positif dengan adanya gejala, serta adanya perlakuan (treatment) misalnya berupa
terapi ARV pada populasi HIV tersebut. Populasi ini akan berkurang karena adanya perkembangan
ke tahapan populasi terinfeksi HIV dengan tahapan laten cepat dan kematian alami. Persamaan (3) merepresentasikan laju perubahan populasi terinfeksi HIV dengan tahapan
laten cepat. Populasi terinfeksi HIV dengan tahapan laten cepat dapat bertambah karena adanya
populasi rentan yang berinteraksi dengan populasi terinfeksi HIV dengan tahapan laten cepat dan
populasi HIV positif dengan adanya gejala serta perkembangan populasi terinfeksi HIV dengan
tahapan laten lambat. Selain itu, populasi ini juga bertambah karena adanya perlakuan (treatment)
misalnya berupa terapi ARVyang diberikan pada populasi HIV dengan adanya gejala. Populasi ini
akan berkurang karena adanya perkembangan menjadi HIV positif dengan adanya gejala dan
kematian alami. Persamaan (4) merepresentasikan laju perubahan populasi HIV positif dengan adanya
gejala. Populasi HIV positif dengan adanya gejala dapat bertambah karena adanya perkembangan
populasi terinfeksi HIV dengan tahapan laten cepat. Pemberian perlakuan (treatment) misalnya
berupa terapi ARV pada populasi ini akan memulihkan sistem imun dan mengurangi terjadinya
infeksi oportunistik pada populasi ini, sehingga populasi ini akan kembali menjadi tahapan
populasi terinfeksi HIV dengan tahapan laten cepat dan populasi terinfeksi HIV dengan tahapan
laten lambat serta perubahan ke tahapan AIDS. Selain itu, populasi ini juga berkurang karena
adanya kematian alami. Persamaan (5) merepresentasikan laju perubahan populasi AIDS. Pertambahan populasi
AIDS disebabkan oleh perkembangan populasi HIV positif dengan adanya gejala. Populasi ini
akan berkurang karena adanya kematian alami dan kematian karena penyakit yang disebabkan
oleh HIV.
Dengan asumsi yang digunakan adalah:
1. Populasi bersifat tertutup artinya tidak ada perpindahan dari satu tempat ke tempat yang lain.
2. Setiap individu terlahir dalam keadaan sehat dengan laju kelahiran konstan.
3. Individu terinfeksi HIV dengan tahapan laten lambat tidak dapat menularkan HIV.
4. Individu AIDS tidak dapat menularkan HIV karena individu tersebut dikarantina dan
mendapat perlakuan khusus yang tidak dapat berinteraksi dengan individu yang dapat
menularkan HIV.
5. Perlakuan (treatment) misalnya berupa terapi ARV hanya diberikan pada individu HIV
positif dengan adanya gejala.
6. Individu pada tahapan HIV positif dengan adanya gejala yang diberikan perlakuan
(treatment) misalnya berupa terapi ARV dapat berubah menjadi individu terinfeksi HIV
dengan tahapan laten cepat dan individu terinfeksi HIV dengan tahapan lambat. Hal tersebut
terjadi karena dengan pemberian perlakuan (treatment) tersebut dapat memulihkan sistem
imun dan mengurangi terjadinya infeksi oportunistik.
7. Individu yang dapat menjadi HIV positif dengan adanya gejala adalah individu terinfeksi
HIV dengan tahapan laten cepat karena individu ini memiliki waktu laten yang lebih pendek.
8. Tahapan individu yang dapat langsung menjadi AIDS adalah individu HIV positif dengan
adanya gejala karena pada individu ini muncul gejala oportunistik.
9. Individu yang dapat meninggal karena adanya penyakit yang disebabkan oleh HIV adalah
individu AIDS karena pada individu AIDS muncul penyakit syaraf dan penyakit infeksi
sekunder.
Model HIV/AIDS dengan tahapan laten yang berbeda mempunyai dua titik setimbang yaitu
titik setimbang bebas penyakit (
) dan titik setimbang endemik
(
) dengan,
(
) (
( ))
Jurnal Matematika 20134

(
( ))
( )
(
( ))
Titik setimbang endemik dijamin ada, jika . Basic reproduction ratio
merupakan parameter yang menyatakan rata-rata jumlah populasi baru yang terinfeksi HIV akibat
masuknya HIV ke dalam populasi sehat yang rentan terhadap HIV. Nilai pada jurnal ini
diperoleh dengan membangun matrik yang membangkitkan jumlah individu baru yang terinfeksi
dengan metode Next-Generation Matrix (NGM) yang dikenalkan oleh Diekmann, dkk, (2009).
Misalkan ( ) , sehingga persamaan ( ) ( ) dapat ditulis sebagai
( ) ( )
dengan ( ) adalah matriks transmisi, yaitu matriks yang berisi sub-populasi tahapan awal
individu yang terinfeksi HIV akibat kontak dengan individu dan . Sedangkan ( ) adalah
matriks transisi, yaitu matriks yang berisi sub-populasi individu yang terinfeksi HIV dan
berkembang menjadi tahapan HIV positif dan AIDS. Oleh karena itu didapatkan,
( ) (
( ) ( )
, ( ) (
,
Misalkan dan masing-masing adalah matriks Jacobian dari ( ) dan ( ) yang dievaluasi
pada titik setimbang bebas penyakit , sehingga dapat ditulis sebagai
(
( )
( )
)
(
,
Dengan metode Next-Generation Matrix, dapat dicari dengan menentukan nilai eigen terbesar
dari matrik atau dapat dinyatakan sebagai ( ). Dari sini diperoleh,
( ( ( )) ( ( )))
( )
Selanjutnya akan dianalisis kestabilan pada setiap titik setimbang tersebut dengan
menggunakan kriteria Kestabilan Routh-Hurwitz. Untuk titik setimbang didapatkan matriks
Jacobian
0 01 2
0 01 1 2 1
.0 0 (1 ) (1 ) 0
1 2 2 2
0 0 01 3
0 0 02 4
b p q
Ep b q
p b
p b
merupakan hasil pelinieran dari model HIV/AIDS dengan tahapan laten yang berbeda pada
titik setimbang . Dari matriks Jacobian tersebut, dengan menggunakan ( ) ,
diperoleh persamaan karakteristik
( )( ) ( ( ( )
)
( ( )
( )
( )
) ( ( )
( )
(
) )) .
Berdasarkan kriteria kestabilan Routh-Hurwitz, titik setimbang akan stabil asimtotis lokal jika
( )
( )
( )
( )
dan
Jurnal Matematika 20135
.
Untuk titik setimbang didapatkan matriks Jacobian
(
)
dengan
(
( )) (
( ))
(
)
(
)
(
( )) (
( ))
(
)
(
)
( ) (
( )) ( ) (
( ))
( ) (
)
( ) (
)
merupakan hasil pelinieran dari model HIV/AIDS dengan tahapan laten yang berbeda
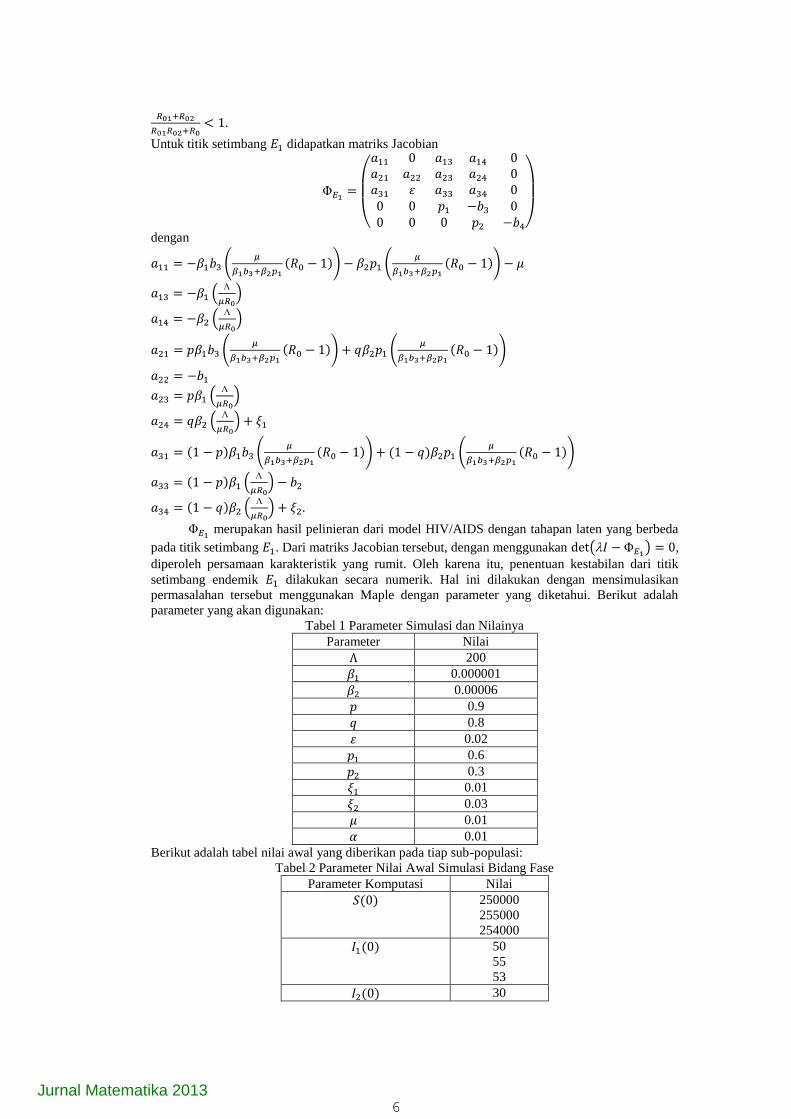
pada titik setimbang . Dari matriks Jacobian tersebut, dengan menggunakan ( ) ,
diperoleh persamaan karakteristik yang rumit. Oleh karena itu, penentuan kestabilan dari titik
setimbang endemik dilakukan secara numerik. Hal ini dilakukan dengan mensimulasikan
permasalahan tersebut menggunakan Maple dengan parameter yang diketahui. Berikut adalah
parameter yang akan digunakan:
Tabel 1 Parameter Simulasi dan Nilainya
Parameter Nilai
200
0.000001
0.00006
0.9
0.8
0.02
0.6
0.3
0.01
0.03
0.01
0.01
Berikut adalah tabel nilai awal yang diberikan pada tiap sub-populasi:
Tabel 2 Parameter Nilai Awal Simulasi Bidang Fase
Parameter Komputasi Nilai
( ) 250000
255000
254000
( ) 50
55
53
( ) 30
Jurnal Matematika 20136

Parameter Komputasi Nilai
( ) 35
32
( ) 21
24
25
( ) 5
6
7
Berdasarkan nilai parameter pada Tabel 1 dan Tabel 2 diperoleh nilai titik setimbang
endemik , yaitu: ( ). Berikut hasil
simulasi bidang fase model penyebaran HIV/AIDS dengan tahapan yang berbeda untuk titik
setimbang endemik dengan nilai :
Gambar 1 Grafik Bidang Fase Model Penyebaran HIV/AIDS dengan Tahapan Laten yang Berbeda
Pada Gambar 1 nampak bahwa plot tersebut mengarah pada titik setimbangnya, yaitu
dan masing-masing untuk populasi terinfeksi HIV tahapan laten cepat ( ) dan
populasi HIV positif dengan adanya gejala ( ). Berdasarkan perilaku tersebut maka dapat
dinyatakan bahwa titik setimbang yang kedua ini adalah stabil asimtotis lokal dengan memenuhi
.
5. Simulasi Numerik
Pada bagian ini akan disimulasikan model matematika penyebaran HIV/AIDS dengan
tahapan yang berbeda. Hal tersebut dilakukan untuk mengetahui perilaku dari sub-populasi pada
model tersebut. Simulasi ini dilakukan dalam waktu tahun dengan nilai awal jumlah
populasi ( ( ) ( ) ( ) ( ) ( )) ( ) orang dan nilai parameter
berdasarkan Tabel 2, dengan menggunakan software Matlab.
Berikut ini adalah hasil simulasi untuk populasi rentan, populasi terinfeksi HIV tahapan
laten lambat, populasi terinfeksi HIV tahapan laten cepat, populasi HIV positif dengan adanya
gejala dan populasi AIDS.
Jurnal Matematika 20137

Gambar 2 Model Matematika Penyebaran HIV/AIDS dengan Tahapan Laten yang Berbeda.
Gambar 2 merupakan hasil simulasi model matematika penyebaran HIV/AIDS dengan
tahapan laten yang berbeda dengan nilai . Terlihat bahwa jumlah populasi
penderita AIDS dan populasi terinfeksi HIV dengan tahapan laten lambat akan terus ada. Oleh
karena itu, pada kondisi ini terjadi endemik di dalam masyarakat.
Berikut ini hasil simulasi model penyebaran HIV/AIDS dengan tahapan laten yang berbeda
jika nilai parameter treatment yang diberikan pada populasi HIV positif dengan adanya gejala
diperbesar, yaitu ; , nilai parameter laju perkembangan ke tahapan AIDS
diperbesar, yaitu dan nilai parameter laju penyebaran populasi terinfeksi HIV dengan
adanya gejala diperkecil, yaitu , serta .
Gambar 3 Model Matematika Penyebaran HIV/AIDS dengan Tahapan Laten yang Berbeda
; dan .
Gambar 3 merupakan hasil simulasi model matematika penyebaran HIV/AIDS dengan
tahapan laten yang berbeda dengan nilai . Terlihat bahwa jika semakin besar nilai treatment
yang diberikan maka laju kenaikan jumlah populasi terinfeksi HIV dan penderita AIDS akan
semakin lambat dan populasi rentan masih ada. Kondisi ini menunjukkan bahwa HIV/AIDS di
dalam masyarakat dapat dieliminasi.
0 50 100 1500
0.5
1
1.5
2
2.5x 10
5 Model Penyebaran HIV/AIDS dengan tahapan laten lambat dan tahapan laten cepat
waktu (tahun)
jum
lah p
upola
si
Populasi rentan
Populasi terinfeksi HIV tahapan laten lambat
Populasi terinfeksi HIV tahapan laten cepat
Populasi HIV positif dengan adanya gejala
Populasi AIDS
0 50 100 1500
0.5
1
1.5
2
2.5x 10
5 Model Penyebaran HIV/AIDS dengan tahapan laten lambat dan tahapan laten cepat
waktu (tahun)
jum
lah p
upola
si
Populasi rentan
Populasi terinfeksi HIV tahapan laten lambat
Populasi teinfeksi HIV tahapan laten cepat
Populasi HIV positif dengan adanya gejala
Populasi AIDS
Jurnal Matematika 20138

6. Kesimpulan
1. Berdasarkan hasil analisis kestabilan model matematika penyebaran HIV/AIDS dengan
tahapan laten yang berbeda, diperoleh titik setimbang bebas penyakit (
) dan
titik setimbang endemik
(
) dengan,
(
) (
( ))
(
( ))
( )
(
( )).
Titik setimbang bebas penyakit akan stabil asimtotis lokal jika dan hanya jika
( )
,
( )
( )
( )
,
( ( ( )) ( ( )))
( ) , dan
. Sedangkan titik setimbang
endemik cenderung stabil asimtotis lokal jika dan hanya jika
( ( ( )) ( ( )))
( ) .
2. Berdasarkan hasil simulasi model matematika penyebaran HIV/AIDS dengan tahapan yang
berbeda menggunakan MATLAB diperoleh kesimpulan bahwa jumlah penderita AIDS akan
terus ada setiap harinya. Selain itu, treatment yang diberikan juga akan berpengaruh pada laju
penyebaran HIV/AIDS. Semakin banyak treatment yang berikan pada populasi terinfeksi HIV
dan semakin berkurangnya laju penyebaran HIV/AIDS karena kontak dengan populasi
terinfeksi HIV, maka jumlah populasi terinfeksi HIV akan menuju nol. Oleh karena itu,
tindakan yang dapat dilakukan agar nilai berkurang adalah mengurangi laju penyebaran
populasi terinfeksi HIV dengan adanya gejala dan laju kelahiran serta meningkatkan tingkat
perlakuan (treatment) misalkan berupa pemberian terapi ARV.
7. Daftar Pustaka
Diekmann, O. Heesterbeek, J.A.P. dan Roberts M.G., 2009, The Construction of Next-Generation
Matrices for Compartmental Epidemic Models, The Royal Society Interface, 7:873–885.
Liu, D. dan Wang, B., 2013, A Novel Time Delayed HIV/AIDS Model with Vaccination &
Antiretroviral Therapy and Its Stability Analysis, Applied Mathematical Modelling,
37:4608–4625.
Nursalam dan Kurniawati N.D., 2008, Asuhan Keperawatan pada Pasien Terinfeksi HIV/AIDS,
Salemba Medika, Jakarta.
Huo, H.F. dan Feng, L.X., 2013, Global Stability for an HIV/AIDS Epidemic Model with
Different Latent Stages and Treatment, Applied Mathematical Modelling, 37:1480–1489. Soewondo, E.S., 2002, Seri Penyakit Tropik Infeksi Perkembangan Terkini dalam Pengelolaan
Beberapa Penyakit Tropik Infeksi, Airlangga University Press, Surabaya.
Olsder, G.J., 2003, Mathematical System Theory, Delft, The Natherland.
Kelley, W.G. dan Peterson, A.C., 2010, The Theory of Differential Equation: Classical and
Qualitative, Springer Science + Business Media, New York.
Merkin, D.R., 1997, Introduction to the Theory of Stability, Springer, New York.
Zhou, K., Doyle, J.C., dan Glover, K., 1996, Robust and Optimal Control, Prentice-Hall, New
Jersey.
Jurnal Matematika 20139

ANALISIS MODEL MATEMATIKA JUMLAH PEROKOK DENGAN DINAMIKA
AKAR KUADRAT
Madya Vica Anggraini, Miswanto, Fatmawati
Departemen Matematika
Fakultas Sains dan Teknologi
Universitas Airlangga
Abstract. The increasing of smokers causes the increasing of humans that are suffering
from diseases caused by smoking. Hence, it should be looked for the solution of this issue. One of
the approach to handle the problem uses mathematical modeling of dynamic of smokers. This
paper will present a dynamic of smokers model for which interaction term is square-root of
subpopulations interaction. The population is divided into potential smokers (𝑃), occasional
smokers (𝐿), heavy or daily smokers (𝑆) and quit smokers (𝑄). In the first model, the interaction
occurs between potential smokers and occasional smokers. Furthermore individuals of quit
smokers comes from individuals of heavy smokers who have quit smoking. Based on the
analytical model is resulted one endemic equilibrium of smokers (𝐸1). Using kriteria Routh-
Hurwitz, we can conclude that endemic equilibrium of 𝐸1 is locally asymptotically stable. In the
second model, the interaction occurs between potential smokers and heavy smokers. Furthermore
individuals of quit smokers comes from individuals of occasional smokers who have quit smoking.
Based on the analytical model results one endemic equilibrium of smokers (𝐸2). Using kriteria
Routh-Hurwitz, we can conclude that endemic equilibrium of 𝐸2 is locally asymptotically stable.
The simulation results of the two models show that the number of potential smokers has decreased
while the number of occasional smokers and heavy smokers has increased. Moreover, the
simulation of the models also shows that the interaction between potential smokers and heavy
smokers more influence to smoke than the interaction between potential smokers and occasional
smokers.
Keywords : Mathematical model, The Number of Smokers, Square-root dinamics, locally
asymptotically stable.
1. Pendahuluan
Indonesia menjadi negara ketiga pada jumlah perokok aktif terbanyak setelah Cina dan
India, yaitu sebesar 34% atau 1 dari 3 orang di Indonesia pada tahun 2008. Jumlah perokok ini
terus meningkat pada tahun 2010 sebesar 34,7% (Tobacco Control Support Center, 2012). Salah
satu hal yang menyebabkan jumlah perokok terus meningkat adalah diabaikannya bahaya tentang
merokok. Hingga saat ini terdapat sekitar 4.800 bahan kimia yang terkandung pada rokok dengan
komponen utama yaitu tar, nikotin dan CO (karbon monoksida) (Tirtosastro dan Murdiyati,
2010). Kebiasaaan merokok telah terbukti berhubungan dengan sedikitnya 25 jenis penyakit pada
berbagai organ tubuh, antara lain beberapa jenis kanker yang berhubungan dengan saluran
pernapasan hingga paru, kandung kemih, gangguan pada kehamilan, penyakit pembuluh darah
seperti penyakit jantung dan stroke serta penyakit lainnya (Aditama, 2001). Selain pada orang
yang merokok (perokok aktif), penyakit-penyakit tersebut juga berdampak pada orang yang tidak
merokok (perokok pasif). Hal ini disebabkan karena secara tidak langsung mereka menghirup asap
rokok. Bahkan pada perokok pasif usia anak, asap rokok yang dihirup dapat mempengaruhi
pertumbuhan paru dan penyakit telinga bagian tengah (Samet, 2006).
Pemodelan tentang peningkatan jumlah perokok bukan hal yang baru. Beberapa peneliti
telah mengembangkan model matematika terkait peningkatan jumlah perokok, seperti yang
dilakukan oleh Sharoni dan Gumel (1980) serta Gunawan dan Nurtamam (2008). Pada kedua
kajian tersebut digunakan model dengan interaksi perkalian antara dua kompartemen (subpopulasi)
yang saling berinteraksi.
Pada tahun 2007, Mickens mengenalkan model dinamik akar kuadrat. Interaksi pada model
dinamik akar kuadrat dilambangkan dengan akar kuadrat dari perkalian dua kompartemen
(subpopulasi) yang saling berinteraksi (Zeb dkk., 2013). Dinamik akar kuadrat pada penyebaran
Jurnal Matematika 201310

jumlah perokok bukan hal yang baru. Zeb, dkk (2013) mengembangkan model dinamik akar
kuadrat dalam memodelkan jumlah perokok dengan mengkonstruksi model menjadi empat
kompartemen (subpopulasi), yaitu subpopulasi bukan atau belum merokok, subpopulasi yang
berisi perokok kadang-kadang, subpopulasi yang berisi perokok berat (harian) dan subpopulasi
yang berisi orang yang telah berhenti merokok. Pada model tersebut diasumsikan seorang individu
yang tidak merokok akan menjadi seorang perokok karena berinteraksi dengan perokok kadang-
kadang dan seorang individu akan berhenti merokok ketika sebelumnya individu tersebut
merupakan perokok berat (harian).
Berdasarkan uraian di atas penulis tertarik untuk mengkaji ulang model matematika
penyebaran jumlah perokok dengan dinamika akar kuadrat yang sebelumnya telah dikaji oleh Zeb,
dkk (2013) dan kemudian mengembangkan model matematika tersebut. Pengembangan dilakukan
pada bentuk dinamika dan alur model. Penulis menggunakan dinamika akar kuadrat dengan
interaksi antara subpopulasi bukan atau belum merokok dan subpopulasi perokok berat (harian).
Penulis juga mengasumsikan jika seseorang ingin berhenti merokok, maka harus menjadi perokok
kadang-kadang terlebih dahulu. Pengembangan dilakukan agar model matematika tentang
peningkatan jumlah perokok lebih mendekati keadaan nyata.
2. Rokok
Rokok sudah dikenal sejak lama oleh suku asli yang mendiami daerah Meksiko. Pada saat
itu merokok sudah menjadi hal yang lazim dilakukan oleh masyarakat Meksiko. Rokok kemudian
mulai menyebar ke suku yang mendiami daerah di sekitar Meksiko, yaitu suku Indian. Pada abad
ke-15, tepatnya pada tahun 1518 Colombus dengan pelaut Spanyol menemukan sebuah dataran
yang saat ini dikenal dengan benua Amerika. Colombus kemudian bertemu dengan suku Indian
yang merupakan suku asli dataran tersebut dan mulai mengenal rokok. Kebiasaan merokok
kemudian menyebar diantara para pelaut Spanyol yang kemudian mereka memperkenalkan
kebiasaan merokok di dataran Eropa. Kebiasaan merokok terus menyebar keseluruh dunia
termasuk Indonesia seiring dengan menyebarnya presepsi yang salah yaitu dengan menghirup
daun tembakau dapat menyembuhkan penyakit (Husaini, 2007).
Di Indonesia rokok dibedakan berdasarkan bahan pembungkus rokok, bahan baku atau isi
rokok, proses pembuatan rokok dan penggunaan filter rokok. Berdasarkan bahan pembungkusnya,
rokok dibedakan menjadi Klobot, Kawung, Sigaret dan Cerutu. Berdasarkan bahan baku ataua isi
rokok, rokok dibedakan menjadi rokok Putih, rokok Kretek dan rokok Klebak. Berdasarkan
pembuatannya, rokok dibedakan menjadi Sigaret kretek tangan dan Sigaret kretek mesin.
Berdasarkan penggunaan rokok, rokok dibedakan menjadi rokok Filter dan rokok non-Filter
(Haris dkk., 2012).
Tembakau merupakan bahan utama rokok yang terdiri dari beberapa kandungan yang tidak
dimiliki oleh daun lainnya yaitu nikotin dan eugenol yang berbahaya bagi kesehatan tubuh. Selain
itu, tembakau yang merupakan tanaman perkebunan juga tidak terlepas dari zat kimia yaitu
pestisida (Husaini, 2007). Dalam satu batang rokok, terdapat sekitar 4.800 bahan kimia
diantaranya Karbon Monoksida, Nikotin, Tar dan Polycyclic.
3. Model Matematika Jumlah Perokok dengan Dinamika Akar Kuadrat.
Pembahasan berikutnya akan dikaji dua model matematika jumlah perokok dengan
dinamika akar kuadrat yang terdiri dari empat kompartemen, yakni perokok potensial (𝑃), perokok
kadang-kadang (𝐿), perokok berat (𝑆) dan mantan perokok (𝑄). Model pertama akan digunakan
interaksi antara perokok potensial dan perokok kadang-kadang, sedangkan model kedua akan
digunakan interaksi antara perokok potensial dan perokok berat.
Berikut adalah model matematika jumlah perokok dengan interaksi antara perokok
potensial dan perokok kadang-kadang.
𝑑𝑃
𝑑𝑡= 𝜑 − 𝛽1 𝑃𝐿 − 𝑐 + 𝜇 𝑃 (1)
𝑑𝐿
𝑑𝑡= 𝛽1 𝑃𝐿 − 𝑐 + 𝜇 + 𝛾 𝐿 (2)
𝑑𝑆
𝑑𝑡= 𝛾𝐿 − 𝑐 + 𝜇 + 𝛿1 𝑆 (3)
Jurnal Matematika 201311

𝑑𝑄
𝑑𝑡= 𝛿1𝑆 − 𝑐 + 𝜇 𝑄 (4)
dengan 𝑃,𝐿 > 0, 𝑆, 𝑄 ≥ 0 dan 𝜑 > 0,0 < 𝛽1,𝑐,𝜇,𝛾,𝛿1 < 1.
Pada persamaan (1) menyatakan laju perubahan jumlah perokok potensial. Jumlah perokok
potensial meningkat karena adanya pertambahan individu yang berumur 10 tahun (𝜑). Jumlah
perokok potensial berkurang karena adanya kematian secara alami (𝜇𝑃) dan kematian yang
sebabkan karena penyakit yang berasal dari rokok. Dalam kasus ini perokok potensial terkena
imbas dari perokok aktif (𝑐𝑃). Selain disebabkan oleh kematian jumlah perokok potensial
berkurang karena bertambahnya jumlah perokok sehingga individu yang pada awalnya merupakan
perokok potensial berpindah subpopulasi menjadi perokok kadang-kadang (𝛽1 𝑃𝐿).
Persamaan (2) menyatakan laju perubahan jumlah perokok kadang-kadang. Jumlah perokok
kadang-kadang meningkat karena meningkatnya jumlah perokok (𝛽1 𝑃𝐿). Jumlah perokok
kadang-kadang berkurang karena kematian secara alami (𝜇𝐿) dan kematian yang sebabkan karena
penyakit akibat merokok (𝑐𝐿). Selain itu jumlah perokok kadang-kadang juga berkurang karena
perpindahan individu dari subpopulasi kadang-kadang ke subpopulasi perokok berat (𝛾𝐿).
Persamaan (3) menyatakan laju perubahan jumlah perokok berat. Jumlah perokok berat
berkurang karena kematian secara alami (𝜇𝑆) dan kematian akibat penyakit yang disebabkan dari
merokok (𝑐𝑆). Selain karena kematian jumlah perokok berat berkurang karena adanya
perpindahan individu dari subpopulasi perokok berat (harian) ke subpopulasi individu yang sudah
berhenti merokok (𝛿1𝑆). Jumlah perokok berat bertambah karena adanya perpindahan individu
dari subpopulasi perokok kadang-kadang menjadi subpopulasi perokok berat (𝛾𝐿).
Persamaan (4) menyatakan laju perubahan jumlah individu yang sudah berhenti merokok.
Jumlah individu yang sudah berhenti merokok berkurang karena kematian baik secara alami (𝜇𝑄)
maupun kematian yang diakibatkan dari penyakit akibat merokok (𝑐𝑄). Jumlah individu yang
sudah berhenti merokok bertambah karena bertambahnya individu yang memutuskan untuk
berhenti merokok (𝛿1𝑆).
Dengan asumsi yang digunakan adalah:
1. Individu yang masuk ke dalam populasi adalah individu yang berusia 10 tahun ke atas.
2. Individu yang merupakan perokok potensialakan menjadi seoarang perokok kadang-kadang
ketika berinteraksi dengan perokok kadang-kadang.
3. Jumlah rokok yang dikonsumsi setiap hari tidak dipertimbangkan.
4. Individu yang sudah berhenti merokok tidak akan merokok lagi.
5. Interaksi selalu ada dan menggunakan akar kuadrat sehingga 𝑃𝐿 ≠ 0. Hal ini berarti
subpopulasi perokok potensial dan perokok kadang-kadang selalu ada (𝑃 ≠ 0 dan 𝐿 ≠ 0).
6. Kematian karena merokok dipertimbangkan baik pada perokok aktif maupun pada perokok
pasif.
Berikut adalah model matematika jumlah perokok dengan interaksi antara perokok
potensial dan perokok berat.
𝑑𝑃
𝑑𝑡= 𝜑 − 𝛽2 𝑃𝑆 − 𝑐 + 𝜇 𝑃 (5)
𝑑𝐿
𝑑𝑡= 𝛽2 𝑃𝑆 − 𝑐 + 𝜇 + 𝛾 + 𝛿2 𝐿 + 𝛼𝑆 (6)
𝑑𝑆
𝑑𝑡= 𝛾𝐿 − 𝑐 + 𝜇 + 𝛼 𝑆 (7)
𝑑𝑄
𝑑𝑡= 𝛿2𝐿 − 𝑐 + 𝜇 𝑄 (8)
dengan syarat:
𝑃,𝑆 > 0,𝐿, 𝑄 ≥ 0 dan 𝜑 > 0,0 < 𝛽2,𝑐,𝜇,𝛾,𝛿2,𝛼 < 1.
Pada persamaan (5) menyatakan laju perubahan jumlah perokok potensial. Jumlah perokok
potensial meningkat karena adanya pertambahan individu yang berumur 10 tahun (𝜑). Jumlah
perokok potensial berkurang karena adanyakematian secara alami (𝜇𝑃) dan kematian yang
sebabkan karena penyakit yang berasal dari rokok, dalam kasus ini perokok potensial terkena
imbas dari perokok aktif (𝑐𝑃). Selain disebabkan oleh kematian jumlah perokok potensial
Jurnal Matematika 201312

berkurang karena bertambahnya jumlah perokok sehingga individu yang pada awalnya merupakan
perokok potensial berpindah subpopulasi menjadi perokok kadang-kadang (𝛽2 𝑃𝑆).
Persamaan (6) menyatakan laju perubahan jumlah perokok kadang-kadang. Jumlah perokok
kadang-kadang meningkat karena meningkatnya jumlah perokok (𝛽2 𝑃𝑆) dan perpindahan
individu dari subpopulasi perokok berat ke subpopulasi perokok kadang-kadang (𝛼𝑆). Jumlah
perokok kadang-kadang berkurang karena kematian secara alami (𝜇𝐿) dan kematian yang
sebabkan karena penyakit akibat merokok (𝑐𝐿). Selain itu jumlah perokok kadang-kadang juga
berkurang karena perpindahan individu dari subpopulasi kadang-kadang ke subpopulasi perokok
berat (𝛾𝐿) dan perpindahan individu dari subpopulasi perokok kadang-kadang ke subpopulasi
individu yang sudah berhenti merokok (𝛿2𝐿).
Persamaan (7) menyatakan laju perubahan jumlah perokok berat. Jumlah perokok berat
berkurang karena kematian secara alami (𝜇𝑆) dan kematian akibat penyakit yang disebabkan dari
merokok (𝑐𝑆). Selain karena kematian, jumlah perokok berat berkurang karena adanya
perpindahan individu dari subpopulasi perokok berat menjadi subpopulasi perokok ringan (𝛼𝑆).
Jumlah perokok berat bertambah karena adanya perpindahan individu dari subpopulasi perokok
kadang-kadang menjadi subpopulasi perokok berat (𝛾𝐿).
Persamaan (8) menyatakan laju perubahan jumlah individu yang sudah berhenti merokok.
Jumlah individu yang sudah berhenti merokok berkurang karena kematian baik secara alami (𝜇𝑄)
maupun kematian yang diakibatkan dari penyakit akibat merokok (𝑐𝑄). Jumlah individu yang
sudah berhenti merokok bertambah karena bertambahnya individu yang memutuskan untuk
berhenti merokok (𝛿2𝐿).
Dengan asumsi yang digunakan adalah:
1. Individu yang masuk ke dalam populasi adalah individu yang berusia 10 tahun ke atas.
2. Individu yang merupakan perokok potensialakan menjadi seoarang perokok kadang-kadang
ketika berinteraksi dengan perokok kadang-kadang.
3. Jumlah rokok yang dikonsumsi setiap hari tidak dipertimbangkan.
4. Individu yang sudah berhenti merokok tidak akan merokok lagi.
5. Interaksi selalu ada dan menggunakan akar kuadrat sehingga 𝑃𝑆 ≠ 0. Hal ini berarti
subpopulasi perokok potensial dan perokok berat selalu ada (𝑃 ≠ 0 dan 𝑆 ≠ 0).
6. Kematian karena merokok dipertimbangkan baik pada perokok aktif maupun pada perokok
pasif.
4. Analisis Model
Model matematika yang terbentuk pada permasalahan jumlah perokok adalah sistem
persamaan diferensial non linear karena adanya interaksi antar komponen, sehingga perlu dicari
solusi khusus. Salah satu solusi khusus dari model matematika jumlah perokok adalah titik
setimbang yang berikutnya akan dianalisis kestabilan dari titik setimbang tersebut. Berikut
diberikan beberapa definisi dan teorema yang berhubungan dengan analisis kestabilan sistem
linier:
Definisi Titik 𝑥∗ pada sistem autonomous 𝑑𝑥
𝑑𝑡 = 𝑓 𝑥 ,
Dikatakan titik setimbang jika memenuhi 𝑓 𝑥∗ = 0.
(Olsder, 2011)
Definisi Matriks Jacobian adalah matriks yang elemen-elemennya merupakan turunan parsial
pertama dari beberapa fungsi. Misalkan terdapat tiga persamaan dengan tiga variabel
sebagai berikut:
𝑦1 = 𝑓1 𝑥1 , 𝑥2 , 𝑥3 , 𝑦2 = 𝑓2 𝑥1 , 𝑥2, 𝑥3 , 𝑦3 = 𝑓3 𝑥1 , 𝑥2, 𝑥3 ,
maka bentuk dari matriks Jacobian berukuran 3 × 3 dari persamaan di atas adalah:
Jurnal Matematika 201313

𝜕𝑦1
𝜕𝑥1
𝜕𝑦1
𝜕𝑥2
𝜕𝑦1
𝜕𝑥3
𝜕𝑦2
𝜕𝑥1
𝜕𝑦2
𝜕𝑥2
𝜕𝑦2
𝜕𝑥3
𝜕𝑦3
𝜕𝑥1
𝜕𝑦3
𝜕𝑥2
𝜕𝑦3
𝜕𝑥3
.
(Olsder dan Woude, 2003)
Teorema Pandang sistem persamaan diferensial linier berikut: 𝑑𝑥
𝑑𝑡= 𝐴𝑥 𝑡 .
Titik setimbang 𝑥∗ disebut stabil asimtotis jika dan hanya jika semua nilai eigen dari
matriks 𝐴, yaitu λ𝑖 𝐴 mempunyai bagian real yang negatif dan dinotasikan sebagai
𝑅𝑒 λ𝑖 𝐴 < 0.
(Olsder dan Woude, 2003)
Pada beberapa permaslahan tanda bagian real dari nilai eigen 𝜆 sulit untuk ditentukan,
sehingga perlu digunakan metode lain yang mampu menentukan tanda bagian real pada nilai eigen
𝜆. Misalkan terdapat sebuah matriks yang berukuran 𝑛 × 𝑛, tanda bagian real dari nilai eigen 𝜆
dapat ditentukan dengan menggunakan kriteria Routh-Hurwitz.
𝜆𝑛 + 𝛼1𝜆𝑛−1 + …+ 𝛼𝑛−1𝜆 + 𝛼𝑛 = 0 (9)
dengan 𝛼𝑗 adalah koefisien yang merupakan bilangan real, 𝑗 = 1,2,… ,𝑛.
Dari persamaan karakteristik (5) tersebut, dapat diperoleh 𝑛 matriks Hurwitz (𝐻𝑛) yang
didefinisikan sebagai berikut :
𝐻1 = 𝑎1 , 𝐻2 = 𝑎1 1𝑎3 𝑎2
, 𝐻3 = 𝑎1 1 0𝑎3 𝑎2 𝑎1
𝑎5 𝑎4 𝑎3
.
𝐻𝑛 =
𝑎1
𝑎3
𝑎5
1 𝑎2
𝑎4
0𝑎1
𝑎3
0 1
𝑎2
⋯⋯⋯
000
⋮𝑎𝑛
⋮ 𝑎𝑛−1
⋮ 𝑎𝑛−2
⋮𝑎𝑛−3
⋯⋯
⋮𝑎1
⋮𝑎2𝑛−1
⋮𝑎2𝑛−2
⋮ 𝑎2𝑛−3
⋮𝑎2𝑛−4
⋯⋯
⋮𝑎𝑛
untuk 𝑛 (gasal),
dan 𝐻𝑛 =
𝑎1
𝑎3
𝑎5
1 𝑎2
𝑎4
0𝑎1
𝑎3
0 1
𝑎2
⋯⋯⋯
000
⋮𝑎𝑛−1
⋮ 𝑎𝑛−2
⋮ 𝑎𝑛−3
⋮𝑎𝑛−4
⋯⋯
⋮1
⋮𝑎2𝑛−1
⋮𝑎2𝑛−2
⋮ 𝑎2𝑛−3
⋮𝑎2𝑛−4
⋯⋯
⋮𝑎𝑛
untuk 𝑛 (genap),
dengan 𝑎𝑗 = 𝛼𝑗 , 𝑗 ≤ 𝑛
0 , 𝑗 > 𝑛 .
Teorema (Kriteria Routh-Hurwitz) Akar-akar dari persamaan (2.1) bernilai negatif atau
mempunyai bagian real negatif jika dan hanya jika det 𝐻𝑗 > 0, 𝑗 = 1,2,… ,𝑛.
(Merkin, 1997)
5. Hasil dan Pembahasan
Model Matematika dengan interaksi antara perokok potensial dan perokok kadang-kadang
diperoleh satu titik setimbang endemik perokok 𝐸1 =(𝑃1, 𝐿1, 𝑆1, 𝑄1), dengan:
𝑃1 = 𝜑 𝑐+𝜇+𝛾
𝛽12+ 𝑐+𝜇 𝑐+𝜇+𝛾
,
𝐿1 = 𝛽1
𝑐+𝜇+𝛾
2
𝑃1,
𝑆1 =𝛾
𝑐+𝜇+𝛿1
𝛽1
𝑐+𝜇+𝛾
2
𝑃1, dan
Jurnal Matematika 201314

𝑄1 =𝛿1𝛾
𝑐+𝜇 𝑐+𝜇+𝛿1
𝛽1
𝑐+𝜇+𝛾
2
𝑃1.
Selanjutnya akan dianalisis kestabilan pada setiap titik setimbang tersebut dengan
sebelumnya memasukkan titik setimbang ke dalam matriks Jacobian, sehingga diperoleh matriks
Jacobian dari titik setimbang di atas adalah sebagai berikut:
𝐽𝐸1=
−𝐽11 −𝐽12 0 0𝐽21 −𝐽12 0 00 𝛾 −𝐽32 00 0 𝛿 −𝑛
,
dengan
𝐽11 = 𝛽1
2+ 𝑐+𝜇 𝑐+𝜇+𝛾
2 𝑐+𝜇+𝛾 ,
𝐽12 = 𝑐+𝜇+𝛾
2,
𝐽21 =𝛽1
2
2 𝑐+𝜇+𝛾 ,
𝐽32 = 𝑐 + 𝜇 + 𝛿 , dan 𝑛 = 𝑐 + 𝜇 > 0.
Untuk menguji kestabilan lokal dari titik setimbang 𝐸1 dilakukan dengan menentukan nilai
eigen dari matriks 𝐽𝐸1. Nilai eigen dari matriks 𝐽𝐸1
diperoleh dari persamaan karakteristik berikut:
𝑑𝑒𝑡 𝐽𝐸1− 𝜆𝐼 = 0
⇔ 𝑛 + 𝜆 𝐽32 + 𝜆 𝜆2 + 𝐽11 + 𝐽12 𝜆 + 𝐽11𝐽12 + 𝐽12𝐽21 = 0.
Dari persamaan karakteristik di atas diperoleh nilai eigen berikut:
𝜆1 = −𝑛 = −(𝑐 + 𝜇),
𝜆2 = −𝐽32 = − 𝑐 + 𝜇 + 𝛿 , dan sisanya merupakan akar-akar dari persamaan berikut:
𝜆2 + 𝑎1𝜆 + 𝑎2 = 0, (10)
dengan 𝑎1 = 𝐽11 + 𝐽12 dan 𝑎2 = 𝐽11𝐽12 + 𝐽12𝐽21 .
Nilai eigen dari persamaan (10) akan dianalisis dengan menggunakan kriteria Routh-Hurwitz.
Syarat agar persamaan (10) mempunyai nilai eigen bernilai negatif atau bagian real yang bernilai
negatif adalah
𝑎1 > 0 dan 𝑎2 > 0.
Karena 𝑐, 𝜇, 𝛾, 𝛽1 > 0, jelas bahwa 𝐽11 , 𝐽12 dan 𝐽21 bernilai positif sehingga 𝑎1 > 0 dan 𝑎2 > 0
atau dengan kata lain nilai eigen dari persamaan (10) bernilai negatif atau mempunyai bagian real
yang bernilai negatif.
Dari perhitungan di atas dapat disimpulkan titik setimbang endemik perokok 𝐸1 =(𝑃1, 𝐿1, 𝑆1, 𝑄1)
bersifat stabil asimtotis lokal. Hal ini berarti dalam populasi tersebut selalu terjadi endemik
penyebaran perokok.
Model Matematika dengan interaksi antara perokok potensial dan perokok berat diperoleh
satu titik setimbang endemik perokok 𝐸2 =(𝑃, 𝐿, 𝑆, 𝑄) = (𝑃2, 𝐿2, 𝑆2, 𝑄2), dengan:
𝑃2 =𝜑 𝑒𝑚−𝛼𝛾
𝛽22𝛾+𝑛 𝑒𝑚−𝛼𝛾
,
𝐿2 =𝑚𝜑
𝑒𝑚−𝛼𝛾−
𝑚𝑛
𝑒𝑚−𝛼𝛾𝑃2,
𝑆2 =𝜑𝛾
𝑒𝑚−𝛼𝛾−
𝑛𝛾
𝑒𝑚−𝛼𝛾𝑃2, dan
𝑄2 =𝛿2𝑚𝜑
𝑛 𝑒𝑚−𝛼𝛾 −
𝛿2𝑚
𝑒𝑚−𝛼𝛾 𝑃2.
Selanjutnya akan dikaji eksistensi titik setimbang (𝐸2). Titik setimbang perokok endemik
perokok (𝐸2) ada jika 𝑃2 > 0, 𝐿2 > 0, 𝑆2 > 0 dan 𝑄2 > 0. Perhatikan bahwa
𝑒𝑚 − 𝛼𝛾 = 𝑐 + 𝜇 + 𝛾 + 𝛿1 𝑐 + 𝜇 + 𝛼 − 𝛼𝛾 > 0. (11)
Dari perhitungan tersebut didapatkan 𝑃2 =𝜑 𝑒𝑚−𝛼𝛾
𝛽12𝛾+𝑛 𝑒𝑚−𝛼𝛾
> 0.
Selanjutnya pandang bentuk 𝐿2, 𝑆2 dan 𝑄2 sebagai berikut
𝐿2 =𝑚𝜑
𝑒𝑚 − 𝛼𝛾−
𝑚𝑛
𝑒𝑚 − 𝛼𝛾𝑃2 =
𝑚 𝜑 − 𝑛𝑃2
𝑒𝑚 − 𝛼𝛾.
𝑆2 =𝜑𝛾
𝑒𝑚 − 𝛼𝛾−
𝑛𝛾
𝑒𝑚 − 𝛼𝛾𝑃2 =
𝜑 − 𝑛𝑃2 𝛾
𝑒𝑚 − 𝛼𝛾.
Jurnal Matematika 201315

𝑄2 =𝛿2𝑚𝜑
𝑛 𝑒𝑚 − 𝛼𝛾 −
𝛿2𝑚
𝑒𝑚 − 𝛼𝛾 𝑃2 =
𝛿2𝑚 𝜑 − 𝑛𝑃2
𝑛 𝑒𝑚 − 𝛼𝛾 .
Agar 𝐿2 > 0, 𝑆2 > 0 dan 𝑄2 > 0 maka haruslah dipenuhi bahwa
𝜑 − 𝑛𝑃2 > 0
𝜑 − 𝑛𝜑 𝑒𝑚 − 𝛼𝛾
𝛽22𝛾 + 𝑛 𝑒𝑚 − 𝛼𝛾
> 0
𝜑 1 −𝑛 𝑒𝑚 − 𝛼𝛾
𝛽22𝛾 + 𝑛 𝑒𝑚 − 𝛼𝛾
> 0.
Karena 𝜑 > 0, maka agar 𝐿2 > 0, 𝑆2 > 0 dan 𝑄2 > 0 harus dipenuhi
1−𝑛 𝑒𝑚 − 𝛼𝛾
𝛽22𝛾 + 𝑛 𝑒𝑚 − 𝛼𝛾
> 0.
Jelas bahwa 0 < 𝑛 𝑒𝑚−𝛼𝛾
𝛽22𝛾+𝑛 𝑒𝑚−𝛼𝛾
< 1, sehingga persamaan di atas selalu dipenuhi.
Selanjutnya akan dianalisis kestabilan pada setiap titik setimbang tersebut dengan
sebelumnya memasukkan titik setimbang ke dalam matriks Jacobian, sehingga diperoleh matriks
Jacobian dari titik setimbang di atas adalah sebagai berikut:
𝐽𝐸2=
−𝑎 −𝑏 0 0𝑔 −𝑒 𝑘 00 𝛾 −𝑚 00 𝛿2 0 −𝑛
,
dengan 𝑛 = 𝑐 + 𝜇, 𝑚 = 𝑐 + 𝜇 + 𝛼,
𝑎 =𝛽2
2 𝑆2
𝑃2+ 𝑐 + 𝜇,
𝑏 =𝛽2
2 𝑃2
𝑆2,
𝑔 =𝛽2
2 𝑆2
𝑃2,
𝑘 =𝛽2
2 𝑃2
𝑆2+ 𝛼.
Untuk menguji kestabilan lokal dari titik setimbang 𝐸2 dilakukan dengan menentukan nilai
eigen dari matriks 𝐽𝐸2. Nilai eigen dari matriks 𝐽𝐸2
diperoleh dari persamaan karakteristik berikut:
𝑑𝑒𝑡 𝐽𝐸2− 𝜆𝐼 = 0
⇔ 𝑛 + 𝜆 𝜆3 + 𝑏1𝜆2 + 𝑏2𝜆 + 𝑏3 = 0,
dengan 𝑏1 = 𝑚 + 𝑎 + 𝑒 , 𝑏2 = 𝑎𝑚 + 𝑒𝑚 + 𝑎𝑒 + 𝑏𝑔 − 𝑘𝛾 dan
𝑏3 = 𝑎𝑒𝑚 + 𝑏𝑔𝑚 − 𝑎𝑘𝛾 . Dari persamaan karakteristik di atas diperoleh nilai eigen berikut
𝜆1 = −𝑛 = −(𝑐 + 𝜇).
Nilai 𝜆 yang lainnya adalah akar-akar dari persamaan berikut:
𝜆3 + 𝑏1𝜆2 + 𝑏2𝜆 + 𝑏3 = 0 (12)
Nilai eigen dari persamaan (12) akan dianalisis dengan menggunakan kriteria Routh-Hurwitz.
Syarat agar persamaan (12) mempunyai nilai eigen bernilai negatif atau bagian real yang bernilai
negatif adalah
𝑏1 > 0, 𝑏2 > 0, 𝑏3 > 0 dan 𝑏1𝑏2 − 𝑏3 > 0.
Karena 𝑚,𝑎, 𝑒 > 0, jelas bahwa 𝑏1 > 0. Berikut akan dianalisis apakah 𝑏2 > 0.
𝑏2 = 𝛽2
2 𝑆2
𝑃2
+ 𝑛 𝑚 + 𝑒𝑚 + 𝛽2
2 𝑆2
𝑃2
+ 𝑛 𝑒 +𝛽2
2
4−
𝛽2
2 𝑃2
𝑆2
+ 𝛼 𝛾.
𝑏2 = 𝛽2
2 𝑆2
𝑃2
+ 𝑛 𝑚 + 𝛽2
2 𝑆2
𝑃2
+ 𝑛 𝑒 +𝛽2
2
4+
𝑒𝑚 − 𝛼𝛾
2 .
Berdasarkan (11) yang menunjukkan bahwa 𝑒𝑚 − 𝛼𝛾 > 0, sehingga 𝑏2 > 0. Berikutnya akan
dianalisis apakah 𝑏3 > 0.
𝑏3 = 𝑎 𝑒𝑚 − 𝑘𝛾 + 𝑏𝑔𝑚
Jurnal Matematika 201316

𝑏3 = 𝑎 𝑒𝑚 − 𝛽2
2 𝑃2
𝑆2
+ 𝛼 𝛾 + 𝑏𝑔𝑚.
𝑏3 = 𝑎 𝑒𝑚 − 𝛽2
2
𝑒𝑚 − 𝛼𝛾
𝛽2𝛾+ 𝛼 𝛾 + 𝑏𝑔𝑚
𝑎3 = 𝑎𝑒𝑚 − 𝛼𝛾
2+ 𝑏𝑔𝑚.
Berdasarkan (11) yang menunjukkan bahwa 𝑒𝑚 − 𝛼𝛾 > 0, sehingga 𝑏3 > 0. Berikutnya akan
dianalisis apakah 𝑏1𝑏2 − 𝑏3 > 0. Karena pada syarat sebelumnya 𝑏1,𝑏2 dan 𝑏3 harus bernilai
positif maka 𝑏1𝑏2 bernilai positif.
𝑏1𝑏2 − 𝑏3 = 𝑚 + 𝑎 + 𝑒 𝑎𝑚 + 𝑒𝑚 + 𝑎𝑒 + 𝑏𝑔 − 𝑘𝛾 − 𝑎𝑒𝑚 + 𝑏𝑔𝑚 − 𝑎𝑘𝛾 𝑏1𝑏2 − 𝑏3 = 𝑚 𝑎𝑚 + 𝑒𝑚 − 𝑘𝛾 + 𝑎 𝑎𝑚 + 𝑒𝑚 + 𝑎𝑒 + 𝑏𝑔 + 𝑒 𝑎2 Sebelum menganalisis lebih lanjut 𝑏1𝑏2 − 𝑏3, akan dianalisis terlebih dahulu 𝑎𝑚 + 𝑒𝑚 − 𝑘𝛾.
𝑎𝑚 + 𝑒𝑚 − 𝑘𝛾 = 𝛽2
2 𝑆2
𝑃2
+ 𝑐 + 𝜇 𝑚 + 𝑒𝑚 − 𝛽2
2 𝑃2
𝑆2
+ 𝛼 𝛾
𝑎𝑚 + 𝑒𝑚 − 𝑘𝛾 = 𝛽2
2𝛾
2 𝑒𝑚 − 𝛼𝛾 + 𝑛 𝑚 +
𝑒𝑚 − 𝛼𝛾
2
Karena 𝑒𝑚 − 𝛼𝛾 > 0 maka dapat disimpulkan bahwa 𝑒𝑚−𝛼𝛾
2> 0 dan
𝛽2
2𝛾
2 𝑒𝑚 − 𝛼𝛾 + 𝑛 𝑚 > 0.
Dari sini dapat disimpulkan 𝑎𝑚 + 𝑒𝑚 − 𝑘𝛾 > 0, sehingga
𝑏1𝑏2 − 𝑏3 = 𝑚 𝑎𝑚 + 𝑒𝑚 − 𝑘𝛾 + 𝑎 𝑎𝑚 + 𝑒𝑚 + 𝑎𝑒 + 𝑏𝑔 + 𝑒 𝑎2 > 0.
Dari perhitungan di atas dapat disimpulkan bahwa titik setimbang endemik perokok
𝐸2 =(𝑃2, 𝐿2, 𝑆2, 𝑄2) bersifat stabil asimtotis lokal. Hal ini berarti dalam populasi tersebut selalau
terjadi endemik penyebaran perokok.
5. Simulasi Numerik
Pada pembasan berikutnya, model matematika jumlah perokok dengan dinamika akar
kuadrat dianalisis secara numerik dengan program Matlab. Dengan memasukkan nilai parameter
yang sudah ditentukan, dapat dipelajari dinamika dari penyebaran jumlah perokok. Pada simulasi
dari dua model matematika tentang penyebaran jumlah perokok digunakan data berikut:
Subpopulasi Jumlah (orang)
Perokok Potensial (𝑃) 68
Perokok Kadang-kadang (𝐿) 5
Perokok Berat atau harian (𝑆) 24
Mantan Perokok (𝑄) 3
Tabel Parameter Nilai Awal
Berikut adalah nilai parameter yang digunakan untuk mensimulasikan momodel:
Parameter Nilai Satuan Sumber
𝜑 2 orang per satuan waktu Diasumsikan
𝛽1 0,05 per satuan waktu Zeb, dkk (2013)
𝛽2 0,07 per satuan waktu Diasumsikan
𝛿1 0,01 per satuan waktu Diasumsikan
𝛿2 0,0165 per satuan waktu Erturk, dkk (2012)
𝑐 0,01 per satuan waktu Diasumsikan
𝜇 0,0021 per satuan waktu Erturk, dkk (2012)
𝛾 0,03 per satuan waktu Zeb, dkk (2013)
𝛼 0,01 per satuan waktu Diasumsikan
Tabel 4.4 Nilai parameter pada Model Matematika Jumlah Perokok dengan Dinamika Akar
Kuadrat.
Jurnal Matematika 201317

Simulasi menggunakan Matlab diperoleh grafik dinamika model matematika dengan
interaksi antara perokok potensial dan perokok kadang-kadang sebagai berikut:
Gambar Dinamika Model Matematika Penyebaran Jumlah Perokok dengan Interaksi antara
Perokok Potensial dan Perokok Kadang-kadang.
Gambar di atas merupakan grafik yang menunjukkan jumlah masing-masing subpopulasi
setiap satuan waktu. Subpopulasi perokok potensial mengalami penurunan sedangkan subpopulasi
perokok kadang-kadang, subpopulasi perokok berat dan subpopulasi mantan perokok mengalami
kenaikan. Setiap subpopulasi terus mengalami perubahan jumlah hingga mencapai titik setimbang
endemik. Hal ini menunjukkan perokok tidak akan pernah punah atau dengan kata lain selalu
terjadi endemik penyebaran perokok.
Berikut hasil simulasi pada model kedua yakni model matematika jumlah perokok dengan
interaksi antara perokok potensial dan perokok berat.
Gambar Dinamika Model Matematika Penyebaran Jumlah Perokok dengan Interaksi antara
Perokok Potensial dan Perokok Berat (harian).
Gambar di atas merupakan grafik yang menunjukkan jumlah masing-masing subpopulasi
setiap satuan waktu. Secara garis besar subpopulasi perokok potensial mengalami penurunan,
sedangkan subpopulasi perokok kadang-kadang, subpopulasi perokok berat dan subpopulasi
mantan perokok mengalami peningkatan. Setiap subpopulasi terus mengalami perubahan jumlah
hingga mencapai titik setimbang endemik. Hal ini menunjukkan perokok tidak akan pernah punah
atau dengan kata lain selalu terjadi endemik penyebaran perokok.
Berikut adalah perbandingan dinamika setiap subpopulasi pada kedua model.
0 50 100 150 200 250 300 350 4000
20
40
60
80
100
120
140
160
180
satuan waktu
jumlah
subp
opula
si
perokok potensial
perokok kadang-kadang
perokok berat
mantan perokok
0 50 100 150 200 250 300 350 4000
50
100
150
200
250
satuan waktu
jum
lah
subp
opul
asi
perokok potensial
perokok kadang-kadang
perokok berat
mantan perokok
Jurnal Matematika 201318

Gambar Perbandingan Dinamika Subpopulasi Perokok Potensial.
Gambar Perbandingan Dinamika Subpopulasi Perokok Kadang-kadang.
Gambar Perbandingan Dinamika Subpopulasi Perokok Berat.
Gambar Perbandingan Dinamika Subpopulasi Mantan Perokok.
Dari hasil simulasi pada kedua model matematika jumlah perokok dengan dinamika akar
kuadrat dapat disimpulkan bahwa jumlah perokok potensial mengalami penurunan sedangkan
jumlah perokok kedang-kadang, jumlah perokok berat dan mantan perokokb mengalami
peningkatan. Selain itu dapat disimpulkan bahwa interaksi antara perokok potensial dan perokok
berat lebih mempengaruhi orang untuk merokok daripada interaksi antara perokok potensial dan
perokok kadang-kadang.
0 50 100 150 200 250 300 350 40010
20
30
40
50
60
70
Satuan Waktu
Jum
lah
Subp
opul
asi
perokok potensial model 1
perokok potensial model 2
0 50 100 150 200 250 300 350 4005
10
15
20
25
30
35
40
45
50
Satuan Waktu
Jum
lah S
ubpo
pulas
i
perokok kadang-kadang model 1
perokok kadang-kadang model 2
0 50 100 150 200 250 300 350 40020
25
30
35
40
45
50
55
Satuan Waktu
Juml
ah S
ubpo
pulas
i
perokok berat model 1
perokok berat model 2
0 50 100 150 200 250 300 350 4000
50
100
150
200
250
Satuan Waktu
Jum
lah
Sub
popu
lasi
mantan perokok model 1
mantan perokok model 2
Jurnal Matematika 201319

6. Kesimpulan
Dari hasil pembahasan diperoleh kesimpulan:
1. Pada analisis titik setimbang dan analisis kestabilan pada titik setimbang model matematika
jumlah perokok dengan dinamika akar kuadrat diperoleh titik setimbang sebagai berikut:
a. Model matematika jumlah perokok dengan interaksi antara perokok potensial dan perokok
kadang-kadang diperoleh satu titik setimbang yakni titik setimbang endemik perokok
𝐸1 =(𝑃1, 𝐿1, 𝑆1, 𝑄1), dengan
𝑃1 =𝜑 𝑐+𝜇+𝛾
𝛽12
+ 𝑐+𝜇 𝑐+𝜇+𝛾 ,
𝐿1 = 𝛽1
𝑐+𝜇+𝛾
2
𝑃1,
𝑆1 =𝛾
𝑐+𝜇+𝛿1
𝛽1
𝑐+𝜇+𝛾
2
𝑃1, dan
𝑄1 =𝛿1𝛾
𝑐+𝜇 𝑐+𝜇+𝛿1
𝛽1
𝑐+𝜇+𝛾
2
𝑃1.
Titik setimbang endemik perokok 𝐸1 selalu bersifat stabil asimtotis lokal.
b. Pada Model Matematika jumlah perokok dengan interaksi antara perokok potensial dan
perokok berat (harian) didapatkan satu titik setimbang yakni titik setimbang endemik
perokok 𝐸2 =(𝑃2, 𝐿2, 𝑆2, 𝑄2), dengan
𝑃2 =𝜑 𝑒𝑚−𝛼𝛾
𝛽22𝛾+𝑛 𝑒𝑚−𝛼𝛾
,
𝐿2 =𝑚𝜑
𝑒𝑚−𝛼𝛾−
𝑚𝑛
𝑒𝑚−𝛼𝛾𝑃2,
𝑆2 =𝜑𝛾
𝑒𝑚−𝛼𝛾−
𝑛𝛾
𝑒𝑚−𝛼𝛾𝑃2,
𝑄2 =𝛿2𝑚𝜑
𝑛 𝑒𝑚−𝛼𝛾 −
𝛿2𝑚
𝑒𝑚−𝛼𝛾 𝑃2,
dan
𝑒 = 𝑐 + 𝜇 + 𝛾 + 𝛿2
𝑚 = 𝑐 + 𝜇 + 𝛼 dan 𝑛 = 𝑐 + 𝜇.
Titik setimbang endemik perokok 𝐸2 selalu bersifat stabil asimtotis lokal.
2. Hasil simulasi dari kedua model dengan menggunakan Matlab diperoleh kesimpulan bahwa
jumlah subpopulasi perokok potensial mengalami penurunan sedangkan jumlah
subpopulasi perokok dan mantan perokok mengalami peningkatan dan interaksi dengan
perokok berat lebih mempengaruhi orang untuk merokok daripada interaksi dengan
perokok kadang-kadang.
7. Daftar Pustaka
Aditama, T.Y., 2001, Masalah Merokok dan Penanggulangannya, Ikatan Dokter Indonesia,
Jakarta.
Gunawan, A.Y. dan Nurtaman, M.E., 2008, Model Dinamik Sederhana untuk Masalah
Peningkatan Populasi Perokok, Mathematics Subject Classification, Vol. 14, Hal. 63-72.
Haris, A., Ikhsan, M., Rogayah, R., 2012, Asap Rokok sebagai Bahan Pencemar dalam Ruangan,
Universitas Indonesia - Rumah Sakit Persahabatan, Jakarta.
Husaini, A., 2007, Tobat Merokok, Mizan Media Utama, Bandung.
Merkin, D.R., 1997, Introduction to the Theory of stability, Springer-Verlag New York Inc:
Amerika.
Olsder, G.J. dan Woude, J.W. van der, 2003, Mathematical System Theory, Second Edition, Delft
University, The Netherlands.
Olsder, G.J., Woude, J.W. van der, Maks, J.G., Jeltsema, D., 2011, Mathematical Systems Theory,
Fourth Edition, Delft University, The Netherlands.
Samet, J.M., 2010, Passive smoking and Health, Tobacco Science, Policy and Health, Second
Edition, Chapter 16.
Sharomi, O. dan Gumel, A.B., 2008, Curtailing Smoking dynamics: A Mathematical modeling
Approach, Applied Mathematics and Computation, Vol. 195, Hal. 475-499.
Tirtosastro, S. dan Murdiyati, A.S., 2010, Kandungan Kimia Tembakau dan Rokok, Buletin
Tanaman Tembakau, Serat dan Minyak Industri 2, Hal. 33-43.
Tobacco Control Support Center, 2012, Fakta Tembakau, Permasalahannya di Indonesia.
Zeb, A., Zaman, G., Momani, S., 2013, Square-root Dynamics of Giving Up Smoking Model,
Applied Mathematical Modelling, Vol. 37, Hal. 5326-5334.
Jurnal Matematika 201320

HYBRID ALGORITMA ARTIFICIAL BEE COLONY DENGAN MULTIPLE ONLOOKER (MO-ABC) DAN ALGORITMA HILL-
CLIMBING (HC) UNTUK MENYELESAIKAN TRAVELING SALESMAN PROBLEM (TSP)
Novia Putri Pertiwi, Herry Suprajitno, Auli Damayanti
Departemen Matematika, Fakultas Sains dan Teknologi, Universitas Airlangga Kampus C, Jl. Mulyorejo, Surabaya
Traveling Salesman Problem is a problem of determining the optimal route from salesman’s routes. Therefore, the purpose of writing this undergraduate thesis is to solve the Traveling Salesman Problem with a Hybrid Artificial Bee Colony with Multiple Onlooker Algorithm and Hill Climbing Algorithm. Artificial Bee Colony with Multiple Onlooker Algorithm is a modification of the Artificial Bee Colony Algorithm. Artificial Bee Colony with Multiple Onlooker is one of the heuristics method inspired by behaviour a colony of bees when they find the food source, onlookers are going to areas where more than one employed bee has found promising food source. Modification uses three onlooker bees to create mutant solution. Hill Climbing is a repetition of the algorithm continues to move toward increasing the value. Hybrid Artificial Bee Colony with Multiple Onlooker Algorithm and Hill Climbing Algorithm is a combination of two algorithms by entering the Hill Climbing Algorithm to process Artificial Bee Colony with Multiple Onlooker Algorithm. The process of algorithm is started by initialitation parameters, generate solution, calculate fitness value, find neighbourhood from the solution and calculate fitness value, roulette wheel selection, find neighbourhood form the solution for onlookers bee and calculate fitness value, select solution for hill climbing algorithm, do the hill climbing algorithm to the selected solution with modified solution, memorize the best solution, find the exhausted solution and the process running untill maximum iteration. The data used is the data 10 cities in East Java and 100 cities in Java Island, and the Java programming language solved with NetBeans IDE 7.2. The objective function (distance) minimum based on hybrid artificial bee colony with multiple onlooker algorithm and hill climbing for data 10 cities in East Java is 1022 km, while the data for 100 cities in Java Island obtained a minimum distance is 21289 km. Keywords: Artificial Bee Colony Algorithm with Multiple Onlooker, Hybrid, Hill climbing Algorithm, Traveling Salesman Problem. 1. Pendahuluan Transportasi merupakan komponen penting dalam dunia industri khusunya dalam proses distribusi ke kota-kota. Penentuan jalur transportasi terpendek biasa disebut dengan Travelling Salesman Problem (TSP). Permasalahan ini merupakan salah satu masalah optimasi yang banyak menarik perhatian para peneliti sampai saat ini. TSP dapat dianalogikan sebagai salesman yang akan
Jurnal Matematika 201321

mengunjungi sejumlah kota, dimana dimana rangkaian kota-kota yang dikunjungi harus membentuk suatu jalur sedemikian rupa sehingga kota-kota tersebut hanya boleh dilewati tepat satu kali dan kemudian kembali lagi ke kota awal. Tujuan dari masalah TSP ini adalah untuk mencari tour atau jarak terpendek. Penyelesaian eksak untuk masalah TSP mengharuskan perhitungan terhadap semua kemungkinan rute yang dapat diperoleh, kemudian memilih salah satu tour yang terpendek. Jika terdapat n kota yang harus di kunjungi, maka diperlukanan proses pencarian sebanyak (n)! tour. Hal inilah yang menyebabkan penyelesaian secara eksak sulit dilakukan. Berdasarkan hal tersebut, menurut [5] banyak peneliti yang lenih memusatkan kepada pengembangan metode-metode pendekatan seperti Genetic Algorithm, Simulated Annealing, Ant Algorithm, dan Artificial Bee Colony Algorithm. Algoritma Artificial Bee Colony (ABC) adalah metode yang diperkenalkan oleh Karaboga pada tahun 2005. Metode ini diinspirasikan dengan kehidupan sebuah koloni lebah saat mereka mencari food source. Dalam algoritma ABC koloni lebah dibagi menjadi 3 kelompok, yaitu: Employed bee, Onlooker bee dan Scout Bee. Dimana masing-masing kelompok mempunyai tugas yang berbeda dalam mencari food source Pada penelitian [7], telah dibandingkan hasil antara prosedur menggunakan algoritma Artificial bee colony with Multiple Onlooker (MO-ABC) dengan hasil algoritma ABC asli. Hasil perbandingan menyatakan bahwa hasil algoritma MO-ABC lebih bagus dari pada hasil algoritma ABC asli. MO-ABC adalah modifikasi dari algoritma ABC. Dimana pada kehidupan nyata Onlooker bee pergi ke food source yang telah di tandai oleh employed bee, kemudian onlooker bee akan pergi ke persekitaran food source lebih dari satu tempat untuk mencari sumber makanan baru. Pada algoritma ABC asli onlooker bee akan pergi ke satu tempat persekitaran food source saja. Pada MO-ABC, Onlooker bee akan pergi lebih dari satu tempat persekitaran sumber makanan untuk mendapatkan sumber makanan baru. Pada MO-ABC ini onlooker bee akan pergi ketiga tempat persekitaran food source. Dalam perkembangannya algoritma MO-ABC dapat dikombinasikan (hybrid) dengan berbagai jenis metode lain, diantaranya dengan metode hill climbing. Menurut [3], Hill-climbing adalah sebuah pengulangan yang terus bergerak menuju ke arah meningkatkan nilai yaitu menanjak. Hill climbing akan berakhir saat mencapai “puncak” dimana tidak ada neighbourhood yang memiliki nilai yang lebih tinggi. Dalam algoritma ini struktur data dari simpul saat ini hanya merekam keadaan dan nilai dari fungsi obyektif. Algoritma hill climbing memiliki kinerja pencarian lokal yang kuat. Algoritma ini dimulai dari
Jurnal Matematika 201322

beberapa kelompok yang diinisialisasikan untuk mendapat area pencarian yang lebih baik, diiterasi dari generasi ke generasi hingga mencapai solusi optimal. Dalam paper ini, Traveling Salesman Problem (TSP) akan diselesaikan menggunakan metode hybrid algoritma Artificial Bee Colony dengan Multiple Onlooker dan algoritma Hill-Climbing, bisa disebut algoritma MOABC-HC.
2. Traveling Salesman Problem Menurut [2] secara matematis permasalahan dari TSP yaitu membuat tour dari n kota (1,2, . . . , �) dimulai dan diakhiri pada kota yang sama, dengan tujuan meminimalkan jarak tour. Tour adalah sebuah cycle dalam � yang memuat setiap titik tepat satu kali. Didefinisikan variabel � sebagai berikut :
� = �1, jikaadagarisdarititikiketitikjdalam����0, yanglain(1)"
Untuk setiap titik #, tepat satu garis (#, $) harus ada pada setiap tour, jadi :
%� = 1,# = 1,2, … , �(2)'
�()
Dan juga untuk setiap titik $, tepat satu garis (#, $) harus ada pada setiap tour, dengan demikian
%� = 1,$ = 1,2,… , �(3)'
()
Secara matematis � dapat menghasilkan subtour jika hanya jika untuk beberapa subset tak kosong + ⊂ -,
%%� = 0�∈/0∈/
dengan +0 = - − +. Jadi, tour terpenuhi oleh persamaan (1), (2), dan (3), untuk semua + ⊂ -, + ≠ ∅, yakni
%%��∈/0
≥ 1∈/
Misalkan jarak dari titik (#, $) adalah 5�, dimana jika # = $ maka 5 = 0 dengan # = 1,2, …… , �. Dengan demikian TSP dapat dituliskan sebagai berikut :
Meminimalkan ∑∑= =
=n
i
n
jijij xcz
1 1
(4)
Jurnal Matematika 201323

dengan batasan :
∑=
=n
jijx
1
1, # = 1,2, … , �.
∑=
=n
iijx
1
1, $ = 1,2, … , �.
1≥∑∑∈ ∈Qi Qj
ijx , ∀+ ⊂ -, dengan + ≠ ∅ dan +0 = - − +
{ }1,0∈ijx , #, $ = 1,2, … , �. � = �1, jikaadagarisdarititikiketitikjdalam����
0, yanglain" 3. Algoritma Artificial Bee Colony Algoritma Artificial Bee Colony diperkenalkan pertama kali oleh Karaboga pada tahun 2005. Algoritma ini mengadopsi cara koloni lebah dalam pencarian sumber makanan. Pada [4], koloni lebah terdiri dari tiga jenis lebah, yaitu: employed bees, onlooker bees, dan scout. Setengah pertama dari jumlah koloni adalah jumlah dari employed bees dan setengah kedua adalah jumlah dari onlooker. Untuk setiap food source hanya ada satu employed bee. Dengan kata lain, jumlah employed bee sama dengan jumlah food source. Employed bee yang meninggalkan food source akan menjadi scout. Pada algoritma ABC, calon solusi dan nilai fitness direpresentasikan sebagai food source dan jumlah nektar. Langkah-langkah pada algoritma ABC adalah sebagai berikut: 1. Inisialisasi parameter. 2. Membangkitkan solusi awal
Solusi dibangkitkan secara random dengan jumlah solusi yang dibangkitkan berupa vekor dengan dimensi sebanyak jumlah parameter optimasi dari permasalahannya. Jumlah solusi yang dibangkitkan. sebanyak jumlah dari employed bee atau onlooker bee.
3. Menghitung nilai fungsi tujuan. 4. Mencari solusi baru berdasarkan neighbourhood. 5. Menghitung nilai fungsi tujuan solusi baru dan membandingkan solusi
Jika nilai fungsi tujuan baru lebih bagus maka solusi baru diingat dan melupakan solusi lama.
6. Menghitung probabilitas solusi berdasarkan nilai fitness Onlooker bee memilih solusi berdasarkan probabilitas dari nilai fitness solusi. menghitung probabilitas menggunakan rumus:
Jurnal Matematika 201324
7 = 8#�∑ 8#�':;'()
Dengan: 7 : probabilitas calon solusi ke-# 8#� : nilai fitness ke-# NF : jumlah calon solusi
7. Onlooker bee menentukan solusi baru berdasarkan neighbourhood dari calon solusi yang terpilih.
8. Menghitung nilai fungsi tujuan solusi baru dan membandingkan solusi. 9. Mengingat solusi terbaik.
10. Menentukan solusi yang habis jika posisi calon solusi tidak berubah lebih lanjut melalui batas yang sudah ditentukan maka calon solusi diasumsikan habis. Batas dari calon solusi habis dihitung dengan cara: < = => × @, dengan: < = Limit habis dari solusi => = Jumlah food source D = Jumlah kota
4. Algoritma Artificial bee colony dengan multiple onlooker Pada penelitian [7],Dalam kehidupan nyata Onlooker bee pergi ke food source yang telah di tandai oleh Employed bee. kemudian onlooker bee akan pergi ke persekitaran food source lebih dari satu tempat untuk mencari sumber makanan baru. Pada algoritma ABC asli onlooker bee akan pergi ke satu tempat persekitaran food source saja. Multiple Onlooker merupakan modifikasi dari algoritma ABC yang asli, yaitu menggunakan lebih dari satu onlooker bee. Dalam modifikasi ini onlooker bee akan pergi ketiga tempat persekitaran food source. Pada MO-ABC untuk menghasilkan calon solusi baru dapat menggunakan persamaan, sebagai berikut A� = � + 0.3C�D� − EF)�G + 0.4C�D� −E�G + 0.3C�D� − EI�G (2.12) dengan � adalah calon solusi x yang ke-i dimensi ke-j saat ini dan E�, EF),�, EI),� merupakan calon solusi baru dari tiga neighbourhood dan urutannya berdasarkan probabilitas. Hal ini jelas i harus berbeda dari k,k-1,k+1. Ketiga neighbourhood tidak memiliki Probabilitas yang sama, Probabilitas terbesar dimiliki neighbourhood yang kedua yaitu 0.4, sedangkan dua neighbourhood lainnya probabilitasnya 0.3. Penentuan probabilitas ini telah di tentukan berdasarkan eksperimen empiris.
Jurnal Matematika 201325

5. Algoritma Hill Climbing Dalam algoritma Hill Climbing menurut [1] terdapat langkah-langkah yang dapat digunakan untuk menyelesaikan TSP, seperti berikut : 1. Mulai dari keadaan awal dan lakukan evaluasi, jika solusi keadaan saat ini
merupakan tujuan maka berhenti, jika tidak lanjutkan keadaan saat ini sebagai keadaan awal.
2. Ulangi sampai tujuan tercapai atau iterasi sampai tidak memberikan perubahan pada keadaan saat ini. a) Tentukan SUCC sebagai nilai terbaik dari successor. SUCC merupakan
keadaan sedemikian rupa sehingga setiap kemungkinan pengganti dari kondisi saat ini akan lebih baik dari SUCC.
b) Lakukan pada tiap operator yang digunakan oleh keadaan saat ini : i. Gunakan operator tersebut dan bentuk keadaan baru. ii. Evaluasi keadaan baru, jika solusi keadaan baru merupakan tujuan
maka berhenti, jika solusi keadaan baru lebih baik dari SUCC maka nilai keadaan baru akan menjadi SUCC, namun jika tidak lebih baik maka nilai SUCC tidak berubah
6. Hybrid Algoritma MO-ABC dan Algoritma HC Algoritma MOABC-HC adalah sebagai berikut:
menentukan solusi untuk algoritma HC();
Hybrid Algortima MO-ABC dan Algoritma HC begin input data dan inisialisasi parameter(); generate solusi awal(); hitung FungsiTujuan solusi awal(); do mencari solusiBaru(); hitung FungsiTujuanEB(); update FungsiTujuan & cek trialLimit(); hitung probabilitas(); seleksi();
for i sampai onlooker mencari new_OB(); hitung FungsiTujuanOB (); update FungsiTujuan & cek trialLimit onlooker bee();
end
Jurnal Matematika 201326

for solusi terpilih() do
memodifikasi solusi (); hitung FungsiTujuanHC(); update FungsiTujuanHC ();
while(FungsiTujuanOB ≤ FungsiTujuanHC); end cek trialLimit(); menyimpan solusi terbaik(); cek limit();
while(maks_iterasi); end
7. Hasil dan Pembahasan Data yang digunakan dalam penelitian ini adalah data jarak 10 kota di Jawa Timur dan data jarak 100 kota di Pulau Jawa [5]. Berikut ini perbandingan solusi terbaik dari 10 Kota dan 100 kota yang dihasilkan dengan nilai a = 1, b = -1 dan phc = 0.5 dengan mengganti jumlah colony, max iterasi dan modifikasi HC merupakan banyaknya iterasi pada proses HC. Solusi bisa didapatkan menggunakan bahasa pemrograman java, yakni menggunakan NetBeans 7.2. Hasil penyelesaian pada data jarak 10 kota di Jawa Timur yang ditunjukkan pada Tabel 1 dan penyelesaian pada data jarak 100 kota di Pulau Jawa yang ditunjukkan pada Tabel 2.
Tabel 1 Perbandingan Solusi Terbaik Data Jarak 10 Kota Jumlah Colony
Modifikasi HC
Maximum Iterasi 100 500 1000
20 5 1022 1022 1022
10 1022 1022 1022 15 1022 1022 1022
50 5 1022 1022 1022
10 1022 1022 1022 15 1022 1022 1022
100 5 1022 1022 1022
10 1022 1022 1022 15 1022 1022 1022
Dari Tabel 1 dapat dilihat bahwa untuk setiap parameter colony, modifikasi HC dan max iterasi didapatkan solusi terbaik yaitu 1022. Dalam hal ini perubahan parameter tidak terlalu berpengaruh terhadap penyelesaian yang didapatkan karena dengan parameter yang kecil sudah mendapatkan penyelesain yang baik
Jurnal Matematika 201327

Tabel 2 Perbandingan Solusi Terbaik Data Jarak 100 Kota Jumlah Colony
Modifikasi HC
Maximum Iterasi 100 500 1000
20 5 27206 24789 23005
10 26469 23611 23551 15 26626 23335 23276
50 5 26506 23731 23607
10 26449 23432 22073 15 25128 23802 23006
100 5 25623 22684 21829
10 24877 22855 23340 15 25666 23518 22204
Dari Tabel 2 dapat dilihat bahwa untuk setiap parameter colony, modifikasi HC dan max iterasi didapatkan solusi terbaik yaitu 21829. Dalam hal ini semakin besar parameter maksimal iterasi dan semakin besar juga parameter jumlah colony maka semakin baik pula solusi yang dihasilkan. Tetapi untuk parameter modifikasi HC tidak berpengaruh pada hasil ini Pada data 10 kota di Jawa Timur, perubahan parameter tidak terlalu berpengaruh terhadap penyelesaian yang didapatkan karena dengan parameter yang kecil sudah mendapatkan penyelesaian yang baik. Untuk data 100 kota di Jawa menunjukkan perubahan parameter berpengaruh terhadap penyelesaian yang didapatkan di perbedaan parameter perubahan parameter berpengaruh terhadap penyelesaian yang didapatkan 8. Kesimpulan Traveling salesman problem dapat diselesaikan menggunakan hybrid algoritma MOABC -HC, dengan menggunakan parameter maksimal iterasi dan jumlah colony yang semakin besar maka semakin baik pula solusi yang dihasilkan. 9. Daftar Pustaka [1] Dat, Huynh Tan, 2014, Artificial Intelligence, Ho Chi Minh City University of Technology, Faculty of Computer Science and Engineering,Vietnam. [2] Garfinkel, R. S. and Nemhauser, G. L., 1972, Integer Programming, John Wiley & Sons, Inc: Canada.
Jurnal Matematika 201328

[3] Jiang, T., dkk., 2013, Evacuation Route Optimization Based on Tabu Search Algorithm and Hill- Climbing Algorithm, Southeast University, School of Transportation, Chinese Overseas Transportation Association (COTA), China. [4] Karaboga, D. and Basturk, B., 2007, On the Performance of Artificial Bee Colony (ABC) Algorithm, Erciyes University, Engineering Faculty, Computer Engineering Department, TR- 38039 Kayseri, Turkey. [5] Pathak, N. and Tiwari, S. P., 2012, Travelling Salesman Problem Using Bee Colony with SPV, International Journal of Soft Computing and Engineering, ISSN: 2231-2307, Volume-2, Issue-3. [6] Roos, Kees., 2004, Workshop Integer Programming, Institut Pertanian Bogor.
[7] Subotic, M., 2012, Artificial Bee Colony Algorithm with Multiple Onlooker for Constrained Optimization Problems, Megatrend Belgrade University, Computer Sciene Faculty, Bulevar Umetnosti, Serbia.
Jurnal Matematika 201329

1
ESTIMASI MODEL REGRESI NONPARAMETRIK MENGGUNAKAN
RADIAL SMOOTHING BERDASARKAN ESTIMATOR
PENALIZED SPLINE
Nur Ahmad Ricky R, Suliyanto, Toha Saifudin
Departemen Matematika
Fakultas Sains dan Teknologi
Universitas Airlangga
Abstract. Regression analysis is one of statistic methods that describes the relationship
between predictor variable and response variable. with two responses variable which
correlate each other is called biresponse regression. Generally, the model of
nonparametric regression is 𝑦𝑖 = 𝑓 𝑥𝑖 + 𝜀𝑖 , i = 1,2,...,n.Where 𝑦𝑖 is response variable
observatiaon to i, 𝑥𝑖 is predictor variable observation to i, and 𝜀𝑖 is error random with
mean 0 and varians 𝜎2. One of smoothing technik use for estimate the nonparametric
model is using radial smoothing based on Penalized Spline Estimator. To get optimum
lambda and optimum knot number is done by minimized GCV (Generalized Cross
Validation) based from Demmler – Reinsch Ortogonalization algorithm. A form of
estimation of nonparametric regression model with radial smoothing based on penalized
spline estimator is 𝒚 = 𝑪 𝑪𝑻𝑪+ 𝜆𝑫 −𝟏𝑪𝑻𝒚. The estimation of nonparametric regression
model with radial smoothing based on penalized spline applied to the data of Indeks
Harga Konsumen (IHK) and inflasi bulanan Indonesia tahun 2006 – 2011. Response
variable is Indeks Harga Konsumen (IHK) and predictor variable is Inflasi Bulanan.
Based from the estimation models, the value of minimized GCV is 27.05262 with knot
number is 7 and optimum lambda is 7.906043. output Kolmogorov-Smirnov test with 𝛼 =
0.05 about error (𝜀) have a result p-value = 0.0942. Because of p-value > 𝛼, H0 accepted.
With the result proved that error (𝜀) is normal distribution with mean -1.712044e-013 and
varians 0.4840309. output Kolmogorov-Smirnov test with = 0.05 about random effect
(u) have a result p-value = 0.5. Because of p-value > 𝛼, H0 accepted. With the result
proved that error (𝜀) is normal distribution with mean 0.03410591 and varians 0.1114586.
Key Words : Nonparametrik Regression, Radial Smoothing, Estimator Penalized Spline.
Jurnal Matematika 201330

1. PENDAHULUAN
1.1 Latar belakang
Analisis regresi merupakan salah satu metode statistika yang sering digunakan oleh
para peneliti pada berbagai bidang keilmuan untuk mengidentifikasi sejumlah variabel
prediktor dalam memprediksi suatu variabel respon. Untuk mengestimasi fungsi regresi,
terdapat tiga macam pendekatan yaitu pendekatan regresi parametrik, regresi
nonparametrik, dan regresi semiparametrik. Regresi parametrik digunakan jika terdapat
informasi bentuk fungsi regresi berdasarkan teori maupun pengalaman masa lalu. Namun
tidak semua pola data mengikuti model regresi parametrik, karena tidak adanya informasi
tentang hubungan antara variabel respon dan variabel prediktor. Jika dipaksakan maka
akan diperoleh kesimpulan yang menyesatkan. Solusi dari masalah tersebut adalah
mengestimasi fungsi regresi menggunakan pendekatan regresi nonparametrik. Regresi
nonparametrik tidak bergantung pada model tertentu sehingga dapat dikatakan regresi
nonparametrik memiliki fleksibilitas yang tinggi terhadap suatu data (Wand, 2002).
Gabungan antara regresi parametrik dan nonparametrik akan didapatkan model regresi
semiparametrik.
Estimasi fungsi pada regresi nonparametrik dilakukan berdasarkan data
pengamatan dengan beberapa teknik smoothing tertentu antara lain dengan menggunakan
Histogram, estimator kernel, deret orthogonal, estimator spline, estimator k-NN,
estimator deret fourier, dan estimator wavelet (Eubank, 1988).
Estimator spline adalah salah satu estimator dalam fungsi nonparametrik yang
umum digunakan karena memberikan fleksibilitas yang lebih baik terhadap karakteristik
suatu fungsi atau data, dan mampu menangani karakter data atau fungsi yang bersifat
mulus (smooth). Salah satu bentuk estimator spline adalah penalized spline yang
diperoleh dengan meminimumkan Penalized Least Square (PLS) yaitu fungsi kriteria
pendugaan yang menggabungkan antara fungsi least square dan kemulusan kurva
(smooth). Penalized spline terdiri dari potongan–potongan polinomial (piece wise
polynomial) yang memiliki sifat tersegmen yang kontinu (Ruppert, et a.l, 2003). Sifat ini
memberikan fleksibilitas yang lebih baik daripada polinomial biasa sehingga
memungkinkan untuk menyesuaikan diri secara efektif terhadap karakteristik fungsi atau
data. Namun, Fungsi basis polinomial pada estimator penalized spline kurang mampu
menangani suatu data yang berdimensi besar. Sehingga untuk menangani masalah
tersebut, dilakukan perubahan terhadap fungsi basis polinomial pada estimator penalized
spline dengan fungsi basis radial (radial basis function). Dalam hal ini penggunaan fungsi
basis radial menjadi solusi untuk menangani suatu data yang berdimensi besar.
Fungsi basis radial merupakan salah satu metode yang digunakan dalam
penyelesaian pada data multidimensional. Kelebihan dari fungsi basis radial adalah dapat
menangani data yang berubah–ubah, memudahkan penyelesaian ke beberapa ruang
dimensi, dan juga memberikan akurasi spektral pada data dalam beberapa tipe aplikasi
(Wright, 2003). Spline memiliki representasi yang alami terhadap fungsi basis radial dan
juga mempermudah perhitungan dalam menyelesaikan suatu data yang berdimensi besar
dan bersifat mulus (smooth). Hubungan antara spline dengan fungsi basis radial dapat
dikatakan sebagai radial smoothing.
Estimasi regresi nonparametrik menggunakan radial smoothing diawali dengan
teknik smoothing estimator penalized spline yaitu dengan meminimumkan fungsi
penalized least square 𝑸 = 𝒚 − 𝑿𝜷 − 𝒁𝒖 𝟐 + 𝜆𝒖𝑻𝒖, dengan parameter penghalus 𝜆
yang merupakan pengontrol antara goodness of fit dan kekasaran fungsi. Menurut
Pemilihan parameter penghalus optimal atau titik knot optimal diperlukan untuk
mengestimasi kurva regresi nonparametrik yaitu dengan memilih nilai GCV (Generalized
Cross Validation) yang minimum (Ruppert, et a.l., 2003). Agar mempermudah
Jurnal Matematika 201331

penyelesaian, penulis menggunakan algoritma Demmler – Reinsch Ortogonalization
yang merupakan merupakan suatu metode yang dapat mempermudah dalam
memilih 𝒚 optimal untuk setiap parameter penghalus 𝜆. Penerapan algortima
Demmler – Reinsch Ortogonalization tidak dapat dilakukan secara manual sehingga
menggunakan bantuan software S-PLUS 2000 untuk mendapatkan penyelesaiannya.
Beberapa penerapan dari model regresi nonparametrik menggunakan radial smoothing
dapat berupa pemetaan, jaringan syaraf, gambaran medis, dan solusi dari turunan parsial.
1.2 Regresi Nonparametrik
Model regresi digunakan untuk mengetahui hubungan antara variabel respon Y dan
variabel prediktor X yang dinyatakan sebagai berikut :
𝑌 = 𝑓 𝑋 + 𝜀 (1)
Misalkan variabel respon Y dan variabel prediktor X diperoleh dari pengamatan
berpasangan 𝑥1, 𝑦1 , 𝑥2 , 𝑦2 ,… , 𝑥𝑛 , 𝑦𝑛 maka model regresi (1) dapat dinyatakan
sebagai
𝑦𝑖 = 𝑓 𝑥𝑖 + 𝜀𝑖 ; 𝑖 = 1,2,… ,𝑛 (2)
dengan 𝜀𝑖 adalah error random yang diasumsikan independen dengan mean 0 dan varians
𝜎𝜀2 dan 𝑓(𝑥𝑖) adalah fungsi regresi yang tidak diketahui bentuknya dan dapat diestimasi
dengan pendekatan spline. Jika fungsi 𝑓(𝑥𝑖) tidak diketahui bentuknya, maka model
regresi pada (2) disebut model regresi nonparametrik.
1.3 Estimator Penalized Spline Pada Regresi Nonparametrik Diberikan n data berpasangan 𝑥1 ,𝑦1 , 𝑥2 ,𝑦2 ,… , (𝑥𝑛 , 𝑦𝑛) mengikuti model
regresi
𝑦𝑖 = 𝑓 𝑥𝑖 + 𝜀𝑖 , 𝑖 = 1, 2,… , 𝑛 (3)
dimana f adalah fungsi regresi yang belum diketahui bentuknya, 𝑦𝑖 adalah variabel respon
ke-i, 𝑥𝑖 adalah variabel prediktor ke-i, dan 𝜀𝑖 adalah error random dengan mean 0 dan
variansi 𝜎2𝑰 . Menurut ruppert (2003), fungsi regresi nonparametrik dengan orde p dan titik –
titik knots 𝜅1, 𝜅2,… ,𝜅𝐾 dinyatakan sebagai
𝑓 𝑥 = 𝛽0 + 𝛽1𝑥 + ⋯+ 𝛽𝑝𝑥𝑝 + 𝛽𝑝𝑘 (𝑥 − 𝜅𝑘)+
𝑝𝐾𝑘=1 , p =1,2,.... (4)
Dari fungsi (4) dapat dirubah menjadi bentuk matriks sehingga didapatkan model linier
campuran
𝒇(𝒙) = 𝑿𝜷 (5)
Dengan
𝑿 =
1 𝑥1
1 𝑥12 ⋯ 𝑥1
𝑝(𝑥1 − 𝜅1)+
𝑝⋯ (𝑥1 − 𝜅𝐾)+
𝑝
1 𝑥21 𝑥2
2 ⋯ 𝑥2𝑝
(𝑥2 − 𝜅1)+𝑝
⋯ (𝑥2 − 𝜅𝐾)+𝑝
⋮1 𝑥𝑛
1 𝑥𝑛2 ⋯ 𝑥𝑛
𝑝(𝑥𝑛 − 𝜅1)+
𝑝⋯ (𝑥𝑛 − 𝜅𝐾)+
𝑝
dan 𝜷 =
𝛽0
𝛽1
⋮𝛽𝑝𝐾
Dan stimator penalized spline dari (5) dapat ditulisakan sebagai
𝒚 = 𝑿𝜷 (6)
. Estimator penalized spline diperoleh dengan meminimumkan fungsi PLS
(Penalized Least Square) yang merupakan ukuran standar dari kesesuaian terhadap data
(goodness of fit) yang terdiri dari least square 𝑦𝑖 − 𝑓 𝑥𝑖 2𝑛
𝑖=1 dan ukuran kemulusan
alami 𝛽𝑝𝑘2𝐾
𝑘=1 , yang dapat dituliskan sebagai berikut:
𝑦𝑖 − 𝑓 𝑥𝑖 2𝑛
𝑖=1 + 𝜆 𝛽𝑝𝑘2𝐾
𝑘=1 , 𝜆 ≥ 0 (7)
dengan 𝜆 adalah parameter penghalus, k adalah jumlah knot, dan p adalah orde
polinomial. Langkah – langkah selanjutnya untuk meminimumkan fungsi PLS adalah
Jurnal Matematika 201332

1) Mengubah 𝑦𝑖 − 𝑓 𝑥𝑖 2𝑛
𝑖=1 kedalam bentuk matriks
𝑦𝑖 − 𝑓 𝑥𝑖 2𝑛
𝑖=1 = 𝒚𝑻𝒚 − 2𝜷𝑻𝑿𝑻𝒚 + 𝜷𝑻𝑿𝑻𝑿𝜷
2) Mengubah 𝛽𝑝𝑘2𝐾
𝑘=1 kedalam bentuk matriks
𝛽𝑝𝑘2𝐾
𝑘=1 = 𝛽𝑝12 + 𝛽𝑝2
2 + … . + 𝛽𝑝𝐾2
Jika diasumsikan terdapat matriks D yang merupakan suatu matriks diagonal,
didefinisikan sebagai
𝑫 =
𝑎11 00 𝑎22
⋯⋯
00
⋮ ⋮ ⋱ ⋮0 0 ⋯ 𝑎 𝑝𝐾+1 (𝑝𝐾+1)
dengan 𝑎11 = 𝑎22 = ⋯ = 𝑎𝑝𝑝 = 𝑎 𝑝+1 (𝑝+1) = 0,
𝑎 𝑝+2 (𝑝+2) = ⋯ = 𝑎 𝑝𝐾+1 (𝑝𝐾+1) = 1
jika fungsi 𝛽𝑝𝑘2𝐾
𝑘=1 dituliskan dalam bentuk matriks, maka:
𝛽𝑝𝑘2𝐾
𝑘=1 = 𝛽0 𝛽1 … 𝛽𝑝𝐾
𝑎11 00 𝑎22
⋯⋯
00
⋮ ⋮ ⋱ ⋮0 0 ⋯ 𝑎 𝑝𝐾+1 (𝑝𝐾+1)
𝛽0
𝛽1
⋮𝛽𝑝𝐾
= 𝜷𝑇𝑫𝜷
Matriks fungsi PLS dapat ditulis sebagai
𝐿 = 𝒚𝑻𝒚 − 2𝜷𝑻𝑿𝑻𝒚 + 𝜷𝑻𝑿𝑻𝑿𝜷+ 𝜆𝜷𝑇𝑫𝜷 (8)
Nilai 𝜷 dapat diperoleh dengan meminimumkan persamaan 𝐿. Syarat perlu agar
persamaan 𝐿 minimum adalah 𝜕𝐿
𝜕𝜷= 0 , sehingga diperoleh
𝜷 = 𝑿𝑻𝑿 + 𝜆𝑫 −1𝑿𝑻𝒚 (9)
Substitusi (6) dan (9) menghasilkan bentuk estimator penalized spline dari f(x) yaitu
𝒚 = 𝑿 𝑿𝑻𝑿 + 𝜆𝑫 −1𝑿𝑻𝒚 (10)
Demmler-Reinsch ortogonalization merupakan suatu metode yang dapat
mempermudah dalam memilih 𝒚 optimal untuk setiap parameter penghalus 𝜆.
Dengan metode ini, mencari nilai RSS akan lebih cepat sehingga nilai GCV
minimum dapat diketahui dengan cepat.
Algoritma Demmler-Reinsch ortogonalization ddideskripsikan sebagai
berikut:
1. Mengasumsikan 𝒚 = 𝑪 𝑪𝑻𝑪 + 𝜆𝑫 −1𝑪𝑻𝒚
2. Mencari nilai R dengan menggunakan dekomposisi cholesky 𝑪𝑻𝑪 = 𝑹𝑻𝑹 3. Menghitung singular value decomposition matriks (𝑹−𝟏)𝑻𝑫𝑹−𝟏 untuk
mendapatkan 𝑼𝑑𝑖𝑎𝑔 𝒔 𝑼𝑻 4. Menghitung matriks A dan vektor b dengan 𝑨 = 𝑪𝑹−𝟏𝑼 𝑑𝑎𝑛 𝒃 = 𝑨𝑻𝒚
5. Menghitung 𝒇 𝜆 = 𝑨 𝒃
𝟏+𝜆𝒔
dengan derajat bebas 𝑑𝑓𝑓𝑖𝑡 (𝜆) = 𝟏𝑻 𝟏
𝟏+𝜆𝒔
1.4 Radial Smoothing
Radial smoothing merupakan salah satu bentuk smoothing yang berdasarkan pada
penalized spline dengan basis radial yang digunakan untuk mengestimasi model
nonparametrik.
Jurnal Matematika 201333

Bentuk model nonparametrik menggunakan radial smoothing dirumuskan sebagai
berikut:
𝑦𝑖 = 𝛽0 + 𝛽1𝑥𝑖 + 𝑢𝑘 𝑥𝑖 − 𝜅𝑘 𝐾𝑘=1 + 𝜀𝑖 ; 𝑖 = 1, 2,… , 𝑛 (11)
Jika diasumsikan terdapat 𝑿 = 1 𝑥𝑖 1≤𝑖≤𝑛 dan 𝒁 = 𝑥𝑖 − 𝜅𝑘 1≤𝑖,𝑘≤𝑛 ,
dengan estimator penalized spline dituliskan sebagai
𝒚 = 𝑿𝜷 + 𝒁𝒖 (12)
dimana 𝜷 dan 𝒖 didapatkan dengan meminimumkan fungsi 𝑄 = 𝒚 − 𝑿𝜷− 𝒁𝒖 2 + 𝜆𝒖𝑇𝒖 (13)
Oleh karena hasil dari (2.19) estimasi model linier campuran bertgantung pada nilai
parameter penghalus𝜆, maka untuk mengestimasinya menggunakan algoritma Demmler –
Reinsch Ortogonalization.
2. METODE PENULISAN
Langkah – langkah penulisan yang berkaitan dengan tujuan penulisan ini adalah
sebagai berikut:
1. Mengestimasi model regresi nonparametrik dengan langkah-langkah sebagai berikut:
Langkah 1. Mengasumsikan data 𝑥𝑖 , 𝑦𝑖 memenuhi model regresi nonparametrik
𝑦𝑖 = 𝑓 𝑥𝑖 + 𝜀𝑖 Langkah 2. Menggunakan pendekatan radial smoothing untuk fungsi regresi
nonparametrik 𝑓 𝑥𝑖 sebagai berikut:
𝑓 𝑥𝑖 = 𝛽0 + 𝛽1𝑥𝑖 + 𝑢𝑘 𝑥𝑖 − 𝜅𝑘 ; 𝑖 = 1, 2,… ,𝑛
𝐾
𝑘=1
dengan 𝜅1,𝜅2,… , 𝜅𝐾 adalah titik – titik knot Langkah 3. Menyatakan model regresi nonparametrik
𝑦𝑖 = 𝑓 𝑥𝑖 + 𝜀𝑖 dalam bentuk model linier campuran, yaitu
𝒚 = 𝑿𝜷+ 𝒁𝒖+ 𝜺
dengan
𝒚 =
𝑦1𝑦2𝑦3
⋮𝑦𝑛
, 𝑿 =
11⋮1
𝑥1
𝑥2
⋮𝑥𝑛
, 𝜷 = 𝛽0
𝛽1 ,𝒖 =
𝑢1𝑢2𝑢3
⋮𝑢𝐾
, 𝜺 =
𝜀1𝜀2𝜀3
⋮𝜀𝑛
𝒁 =
𝑥1 − 𝜅1 𝑥1 − 𝜅2 ⋯ 𝑥1 − 𝜅𝐾
𝑥2 − 𝜅1 𝑥2 − 𝜅2 ⋯ 𝑥2 − 𝜅𝐾
𝑥3 − 𝜅1 ⋮
𝑥𝑛 − 𝜅1
𝑥3 − 𝜅2 ⋮
𝑥𝑛 − 𝜅2
⋯⋱⋯
𝑥3 − 𝜅𝐾 ⋮
𝑥𝑛 − 𝜅𝐾
,
Langkah 4. Untuk mengestimasi model linier campuran, digunakan metode PLS,
yaitu dengan meminimumkan fungsi
𝑸 = 𝒚 − 𝑿𝜷 − 𝒁𝒖 𝟐 + 𝜆𝒖𝑻𝒖
Langkah 5. Syarat agar fungsi 𝑸 minimum adalah 𝜕𝑸
𝜕𝜷= 𝟎 𝑑𝑎𝑛
𝜕𝑸
𝜕𝒖= 𝟎
Langkah 6. Mendapatkan estimator 𝜷 dan 𝒖 secara simultan
Langkah 7. Menyatakan estimasi model linier campuran
Langkah 8. Menggunakan algoritma Demmler – Reinsch Ortogonalization untuk
kestabilan perhitungan dengan langkah – langkah sebagai berikut
1. Menghitung dekomposisi cholesky dari 𝑪𝑻𝑪, yaitu
Jurnal Matematika 201334

𝑪𝑻𝑪 = 𝑹𝑻𝑹 dengan R matriks segitiga atas
2. Menghitung singular value decomposition dari matriks
(𝑹−𝟏)𝑻𝑫𝑹−𝟏 = 𝑼𝑑𝑖𝑎𝑔 𝒔 𝑼𝑻
3. Menghitung matriks A dan vektor b sebagai berikut
𝑨 = 𝑪𝑹−𝟏𝑼 𝑑𝑎𝑛 𝒃 = 𝑨𝑻𝒚
4. Menghitung 𝒇 𝜆 = 𝑨 𝒃
𝟏+𝜆𝒔
dengan derajat bebas 𝑑𝑓𝑓𝑖𝑡 (𝜆) = 𝟏𝑻 𝟏
𝟏+𝜆𝒔
5. Meminimukan fungsi Generalized Cross Validation (GCV)
untuk mendapatkan parameter penghalus (𝜆) yang optimal
𝐺𝐶𝑉 𝜆 =𝑅𝑆𝑆(𝜆)
1−𝑛−1𝑑𝑓𝑓𝑖𝑡 (𝜆) 2
dengan 𝑅𝑆𝑆 𝜆 = 𝒚𝑇𝒚 − 2𝒚𝑇𝒇 𝜆 + 𝒇 𝜆𝑇𝒇 𝜆
Langkah 9. Mengestimasi model linier campuran.
2. Mendapatkan interval kepercayaan untuk rata-rata respon model regresi
nonparametrik menggunakan radial smoothing berdasarkan estimator penalized
spline dengan langkah – langkah sebagai berikut:
Langkah 1. Menyatakan penduga model linier campuran dalam bentuk 𝑓 𝑥 =
𝑪𝒙 𝑪𝑻𝑪+ 𝜆𝑫
−𝟏𝑪𝑻𝒚, dengan 𝑿𝑥 = 1 𝑥 , 𝒁𝑥 = 𝑥 − 𝜅𝑘 1≤𝑘≤𝐾
𝑪 = (𝑿 𝒁) , 𝑪𝒙 = (𝑿𝑥 𝒁𝑥), 𝑫 = 𝟎𝟐𝒙𝟐 𝟎𝟐𝒙𝒌𝟎𝒌𝒙𝟐 𝑰𝒌𝒙𝒌
Langkah 2. Menghitung 𝑣𝑎𝑟 𝑓 𝑥 |𝒖
Langkah 3. Mendapatkan simpangan baku 𝑠 𝑓 𝑥 |𝒖
Langkah 4. Mendapatkan interval kepercayaan (1- α)100% untuk rata-rata respon
𝐸 𝑓 𝑥 |𝒖 yaitu
𝑓 𝑥 ±
𝑧 1−
𝛼
2 𝑠 𝑓 𝑥 |𝒖 untuk 𝑛 besar
𝑡 1−
𝛼
2;𝑑𝑓𝑟𝑒𝑠
𝑠 𝑓 𝑥 |𝒖 untuk 𝑛 kecil
Langkah 5. Mendapatkan grafik selang kepercayaan rata – rata respon model
regresi nonparametrik.
Untuk menentukan interval kepercayaan (1- α)100% untuk rata-rata respon
digunakan algoritma sebagai berikut:
Langkah 1. Menyatakan 𝒚 = ℓ𝑥𝑡 𝒚 dengan ℓ𝑥
𝑡 = 𝑪𝒙 𝑪𝑻𝑪+ 𝜆𝑫
−𝟏𝑪𝑻
Langkah 2. Menghitung nilai estimator dari 𝜎𝜀2, yaitu 𝜎 𝜀
2 =𝑅𝑆𝑆(𝜆)
𝑑𝑓𝑟𝑒𝑠 (𝜆)
dengan 𝑑𝑓𝑟𝑒𝑠 𝜆 = 𝑛 − 2𝟏𝑇 𝟏
𝟏+𝝀𝒔 +
𝟏
𝟏+𝝀 𝒔
2
Langkah 3. Mendapatkan selang kepercayaan dari rata – rata, yaitu:
𝑓 𝑥 ±
𝑧 1−
𝛼
2 𝑠 𝑓 𝑥 |𝒖 untuk 𝑛 besar
𝑡 1−
𝛼
2;𝑑𝑓𝑟𝑒𝑠
𝑠 𝑓 𝑥 |𝒖 untuk 𝑛 kecil
𝑠 𝑓 𝑥 |𝒖 = 𝜎 𝜀 𝑑𝑖𝑎𝑔𝑜𝑛𝑎𝑙 𝑨 𝑑𝑖𝑎𝑔 𝟏
𝟏+𝜆𝒔 𝑨𝑇
Langkah 4. Mendapatkan grafik interval kepercayaan untuk rata-rata respon
model regresi nonparametrik menggunakan radial smoothing
berdasarkan estimator penalized spline.
Jurnal Matematika 201335

3. HASIL DAN PEMBAHASAN
3.1 Estimasi Model Regresi Nonparametrik Menggunakan Radial Smoothing
Berdasarkan Estimator Penalized Spline
Diasumsikan data berpasangan 𝑥𝑖 ,𝑦𝑖 , i = 1,2,...,n memenuhi model regresi
nonparametrik
𝑦𝑖 = 𝑓 𝑥𝑖 + 𝜀𝑖 , i = 1,2,...,n (17)
dengan 𝑦𝑖 adalah variabel respon pengamatan ke 𝑖, 𝑥𝑖 adalah variabel prediktor
pengamatan ke 𝑖, dan 𝜀𝑖 adalah error random independen identik berdistribusi normal
dengan mean 0 dan varians 𝜎2. Fungsi 𝑓 𝑥𝑖 pada persamaan (17) tidak diketahui
bentuknya dan diasumsikan smooth, sehingga dapat didekati dengan fungsi radial
smoothing yang dinyatakan sebagai berikut
𝑓 𝑥𝑖 = 𝛽0 + 𝛽1𝑥𝑖 + 𝑢𝑘 𝑥𝑖 − 𝜅𝑘 𝐾𝑘=1 (18)
Substitusikan (4.2) ke (4.1) diperoleh model regresi nonparametrik dengan pendekatan
fungsi radial smoothing sebagai berikut
𝑦𝑖 = 𝛽0 + 𝛽1𝑥𝑖 + 𝑢𝑘 𝑥𝑖 − 𝜅𝑘 𝐾𝑘=1 + 𝜀𝑖 ; 𝑖 = 1, 2,… ,𝑛 (19)
dengan 𝜅1,𝜅2,… , 𝜅𝐾 adalah titik – titik knot. Model (19) dapat dinyatakan dalam bentuk
model linier campuran sebagai berikut
𝒚 = 𝑿𝜷+ 𝒁𝒖+ 𝜺 (20)
Untuk mengestimasi model (20) digunakan metode Penalized Least Square (PLS), yaitu
dengan meminimumkan fungsi PLS sebagai berikut
𝑸 = 𝒚 − 𝑿𝜷− 𝒁𝒖 𝟐 + 𝜆𝒖𝑻𝒖 (20)
Persamaan (20) dapat dinyatakan sebagai berikut
𝑸 = 𝒚𝑻𝒚 − 2𝜷𝑻𝑿𝑻𝒚 − 2𝒖𝑻𝒁𝑻𝒚 + 2𝒖𝑻𝒁𝑻𝑿𝜷+ 𝜷𝑻𝑿𝑻 𝑿𝜷 +𝒖𝑻𝒁𝑻𝒁𝒖 + 𝜆 𝒖𝑻𝒖 (21)
Nilai 𝜷 dan 𝒖 dapat diperoleh dengan meminimumkan fungsi (21). Syarat perlu agar
fungsi 𝑸 minimum adalah 𝜕𝑸
𝜕𝜷= 𝟎 𝑑𝑎𝑛
𝜕𝑸
𝜕𝒖= 𝟎, sehingga diperoleh
𝝏𝑸
𝝏𝜷 = −2𝑿𝑻𝒚 + 2𝑿𝑻𝒁𝒖+ 2𝑿𝑻 𝑿𝜷 = 𝟎
𝑿𝑻𝒁𝒖 + 𝑿𝑻𝑿𝜷 = 𝑿𝑻𝒚 (22) 𝝏𝑸
𝝏𝒖 = −2𝒁𝑻𝒚 + 2𝒁𝑻𝑿𝜷 + 2𝒁𝑻𝒁𝒖 + 2𝜆𝒖 = 𝟎
𝒁𝑻𝑿𝜷 + 𝒁𝑻𝒁𝒖+ 𝜆𝒖 = 𝒁𝑻𝒚 (23)
Dari persamaan (22) dan (23) diperoleh
𝑿𝑻 𝑿 𝑿𝑻𝒁𝒁𝑻𝑿 𝒁𝑻𝒁 + 𝜆𝑰
𝜷𝒖 =
𝑿𝑻𝒚
𝒁𝑻𝒚
𝑿𝑻 𝑿 𝑿𝑻𝒁𝒁𝑻𝑿 𝒁𝑻𝒁
+ 𝟎 𝟎𝟎 𝜆𝑰
𝜷𝒖 = 𝑿
𝑻
𝒁𝑻 𝒚
𝑿𝑻
𝒁𝑻 𝑿 𝒁 + 𝜆
𝟎 𝟎𝟎 𝑰
𝜷𝒖 = 𝑿
𝑻
𝒁𝑻 𝒚 (24)
Misalkan 𝑪 = 𝑿 𝒁 dan 𝑫 = 𝟎𝟐𝒙𝟐 𝟎𝟐𝒙𝒌𝟎𝒌𝒙𝟐 𝑰𝒌𝒙𝒌
, maka persamaan (24) dapat dinyatakan
sebagai berikut
𝑪𝑻𝑪+ 𝜆𝑫 𝜷𝒖 = 𝑪𝑻𝒚 (25) (25)
Dari (25) diperoleh estimator untuk 𝜷 dan 𝒖 adalah
𝜷
𝒖 = 𝑪𝑻𝑪+ 𝜆𝑫
−𝟏𝑪𝑻𝒚 (26)
Akhirnya diperoleh estimasi model linier campuran (26) adalah
𝒚 = 𝑪 𝑪𝑻𝑪+ 𝜆𝑫 −𝟏𝑪𝑻𝒚 (27)
Jurnal Matematika 201336

Oleh karena estimasi model linier campuran pada (26) bertgantung pada nilai parameter
penghalus𝜆, maka untuk mengestimasinya menggunakan algoritma Demmler – Reinsch
Ortogonalization.
3.2 Interval Kepercayaan Rata-rata Respon Model Regresi Nonparametrik
Menggunakan Radial Smoothing Diberikan model linier campuran yang dituliskan sebagai berikut
𝒚 = 𝑿𝜷 + 𝒁𝒖 + 𝜺 , 𝐶𝑜𝑣 𝒖𝜺 =
𝜎𝑢2𝑰 0
0 𝜎𝜀2𝑰 (28)
dengan u adalah random effect dan
𝑿 =
11⋮1
𝑥1
𝑥2
⋮𝑥𝑛
,, 𝒁 =
𝑥1 − 𝜅1 𝑥1 − 𝜅2 ⋯ 𝑥1 − 𝜅𝐾
𝑥2 − 𝜅1 𝑥2 − 𝜅2 ⋯ 𝑥2 − 𝜅𝐾
𝑥3 − 𝜅1 ⋮
𝑥𝑛 − 𝜅1
𝑥3 − 𝜅2 ⋮
𝑥𝑛 − 𝜅2
⋯⋱⋯
𝑥3 − 𝜅𝐾 ⋮
𝑥𝑛 − 𝜅𝐾
Jika didefinisikan 𝑿𝑥 = 1 𝑥 , 𝒁𝑥 = 𝑥 − 𝜅𝑘 1≤𝑘≤𝐾, dan 𝑪𝑥 = 𝑿𝑥 𝒁𝑥 , maka dari
persamaan (28) diperoleh estimator dari 𝑓 𝑥 adalah
𝑓 𝑥 = 𝑿𝑥𝜷 + 𝒁𝑥𝒖 = 𝑪𝑥 𝜷
𝒖 = 𝑪𝑥 𝑪
𝑻𝑪+ 𝜆𝑫 −𝟏𝑪𝑻𝒚 (29)
Dari (29) dapat dihitung varians dari 𝑓 𝑥 |𝒖 sebagai berikut:
𝑣𝑎𝑟 𝑓 𝑥 |𝒖 = 𝑪𝑥 𝐶𝑜𝑣 𝜷
𝒖 |𝒖 𝑪𝑥
𝑇 (30)
dengan 𝐶𝑜𝑣 𝜷
𝒖 |𝒖 = 𝜎𝜀
2 𝑪𝑇𝑪+𝜎𝜀
2
𝜎𝑢2 𝑫
−1
𝑪𝑇𝑪 𝑪𝑇𝑪 +𝜎𝜀
2
𝜎𝑢2 𝑫
−1
Dari persamaan (30) diperoleh simpangan baku dari 𝑓 𝑥 |𝒖 adalah
𝑠 𝑓 𝑥 |𝒖 = 𝜎𝜀 𝑪𝑥 𝑪𝑇𝑪+
𝜎𝜀2
𝜎𝑢2 𝑫
−1
𝑪𝑇𝑪 𝑪𝑇𝑪+𝜎𝜀
2
𝜎𝑢2 𝑫
−1
𝑪𝑥𝑇 (31)
Dari (29) dan (31) diperoleh 𝑓 𝑥 |𝒖 ~ 𝑁 𝐸 𝑓 𝑥 |𝒖 , 𝑠 𝑓 𝑥 |𝒖 , sehingga
𝑓 𝑥 −𝐸 𝑓 𝑥 |𝒖
𝑠 𝑓 𝑥 |𝒖 ~ 𝑁(0,1) (32)
Dari (32) diperoleh pendekatan interval kepercayaan 100(1-α)% untuk 𝐸 𝑓 𝑥 |𝒖 adalah
𝑓 𝑥 ±
𝑧 𝛼
2 𝑠 𝑓 𝑥 |𝒖 untuk 𝑛 besar
𝑡 𝛼
2;𝑑𝑓𝑟𝑒𝑠
𝑠 𝑓 𝑥 |𝒖 untuk 𝑛 kecil (33)
3.3 Penerapan Program Pada Data Indeks Harga Konsumen dan Inflasi Bulanan
Indonesia Tahun 2006 – 2014
Data sekunder yang digunakan untuk penerapan model regresi nonparametrik
menggunakan radial smoothing berdasarkan estimator penalized spline adalah data
Indeks Harga Konsumen (IHK) dan Inflasi bulanan tahun 2006 – 2014. Dalam data
tersebut terdapat 97 pengamatan setiap bulan tahun 2006 – 2014 dengan satu variabel
respon (y) yaitu Inflasi Bulanan dan satu variabel prediktor (x) yaitu Indeks Harga
Konsumen (IHK).
Gambaran awal dari data tersebut adalah dengan membuat plot antara produksi
sayuran semusim menurut data inflasi bulanan (y) dengan data indeks harga konsumen (x)
ditampilkan pada plot berikut:
Jurnal Matematika 201337

Bentuk plot antara data inflasi (y) dengan IHK (x) diasumsikan tidak mengikuti
fungsi tertentu, maka untuk estimasi dari plot tersebut menggunakan pendekatan regresi
nonparametrik. Dalam hal ini estimasi regresi nonparametrik menggunakan radial
smoothing berdasarkan estimator penlized spline.
Hasil dari estimasi regresi nonparametrik menggunakan radial smoothing
berdasarkan estimator penalized spline deiperoleh dengan mencari jumlah titik knot yang
optimal dan nilai 𝜆 optimal dengan meminimumkan kriteria GCV. Dengan algoritma
Demmler – Reinsch Ortogonalization yang diaplikasikan menggunakan program S-PLUS
2000 diperoleh hasil sebagai berikut
Tabel 1. Tabel Jumlah Knot, Parameter Penghalus (𝝀) optimal, dan GCV Minimum
jumlah knot 𝝀 optimal GCV minimum
1 1526.417967 30.77133
2 3906.939937 30.91199
3 3906.939937 30.83352
4 4714.866363 30.83420
5 5689.866029 30.78986
6 13.894955 28.06853
7 7.906043 27.05262
8 13.894955 28.09548
9 24.420531 28.40604
10 24.420531 28.29807
11 13.894955 28.10186
12 29.470517 28.55453
13 42.919343 28.45134
14 35.564803 27.88920
15 42.919343 28.15586
Dari tabel 4.1 terlihat bahwa nilai GCV minimum sebesar 27.05262 dengan nilai 𝜆
optimal adalah 7.906043 yang diperoleh pada 𝜅 = 7. Agar lebih jelas dapat dilihat pada
gambar 2 dan gambar 3.
Gambar 1. Plot Antara Inflasi dan IHK
110 120 130 140 150 160
IHK
-1
0
1
2
3
Infla
si
Jurnal Matematika 201338

Gambar 2 Plot GCV terhadap parameter penghalus 𝝀 untuk jumlah knot
optimal 𝜿 = 𝟕
Gambar 3 Plot GCV terhadap jumlah knot 𝜿 untuk parameter penghalus 𝝀
optimal = 7.906043
Setelah memperoleh 𝜆 optimal dan jumlah knot untuk masing – masing variabel
prediktor yang bersesuaian, selanjutnya dapat diperoleh 𝑦 menggunakan program
estimasi model nonparametrik. Hasil dari program estimasi model nonparametrik maka
diperoleh estimasi model nonparametrik menggunakan radial smoothing yaitu:
𝑦 = 20.176340407 − 0.182943549x + 0.251275191 𝑥 − 114.1 − 0.048017794 𝑥 − 118.71 + 0.003353347 𝑥 − 126.46 + 0.009892929 𝑥 − 131.41 + 0.035366976 𝑥 − 138.72
− 0.095417230 𝑥 − 144.14 + 0.082287917 𝑥 − 148.67 Interval Kepercayaan rata – rata respon model nonparametrik dapat dilihat pada
lampiran 5. Agar lebih jelas, dapat dilihat pada plot interval kepercayaan rata-rata respon
model regresi nonparametrik pada gambar 4
Gambar 4 Plot interval kepercayaan rata-rata respon model regresi
nonparametrik menggunakan radial smoothing
0 5 10 15 20 25
Lambda
27.05
27.10
27.15
27.20
GC
V
0.5 3.0 5.5 8.0 10.5 13.0 15.5
Jumlah.Knot
27
28
29
30
31
GC
V.m
in
Jurnal Matematika 201339

Berdasarkan pada model di atas akan dilakukan uji normalitas terhadap error (𝜀)
dengan hipotesis sebagai berikut:
H0: error (𝜀) berdistribusi normal
H1: error (𝜀) tidak berdistribusi normal
Dari hasil uji Kolmogorov-Smirnov dengan tingkat signifikansi = 0.05 diperoleh nilai
p-value = 0.0942. Karena p-value > yang berakibat H0 diterima sehingga dapat
disimpulkan bahwa error (𝜀) berdistribusi normal dengan mean -1.712044e-013 dan
varians 0.4840309.
Selanjutnya akan dilakukan uji normalitas terhadap random effect dengan hipotesis sebgai
berikut:
H0 : random effect (u) berdistribusi normal
H1 : random effect (u) tidak berdistribusi normal
Dari hasil uji Kolmogorov-Smirnov dengan tingkat signifikansi = 0.05 diperoleh nilai
p-value = 0.5. Karena p-value > yang berakibat H0 diterima sehingga dapat
disimpulkan bahwa random effect (u) berdistribusi normal dengan mean 0.03410591
dan varians 0.1114586.
4. Kesimpulan dan Saran
4.1 Kesimpulan
Berdasarkan pembahasan dan hasil, dapat disimpulkan bahwa:
1. Model regresi nonparametrik dinyatakan sebagai
𝑦𝑖 = 𝑓 𝑥𝑖 + 𝜀𝑖 , i = 1,2,...,n
fungsi radial smoothing yang dinyatakan sebagai berikut
𝑓 𝑥𝑖 = 𝛽0 + 𝛽1𝑥𝑖 + 𝑢𝑘 𝑥𝑖 − 𝜅𝑘 𝐾𝑘=1
2. Bentuk estimasi dari model regresi nonparametrik menggunakan radial
smoothing berdasarkan estimator penalized spline adalah
𝒚 = 𝑪 𝑪𝑻𝑪+ 𝜆𝑫 −𝟏𝑪𝑻𝒚
dengan estimator untuk 𝜷 dan 𝒖 adalah
𝜷
𝒖 = 𝑪𝑻𝑪+ 𝜆𝑫
−𝟏𝑪𝑻𝒚
3. Berdasarkan pada data indeks harga konsumen dan inflasi bulanan indonesia
tahun 2006 – 2014, didapatkan bentuk estimasi dari model regresi nonparametrik
menggunakan radial smoothing berdasarkan estimator penalized spline adalah
𝑦 = 20.176340407 − 0.182943549x + 0.251275191 𝑥 − 114.1 − 0.048017794 𝑥 − 118.71 + 0.003353347 𝑥 − 126.46 + 0.009892929 𝑥 − 131.41 + 0.035366976 𝑥 − 138.72
− 0.095417230 𝑥 − 144.14 + 0.082287917 𝑥 − 148.67 4.2 Saran
Penulis menyarankan untuk penulisan skripsi selanjutnya membahas tentang model
regresi nonparametrik radial smoothing dengan variabel prediktor lebih dari satu.
5. DAFTAR PUSTAKA
[1] Eubank, R, 1988, Spline Smoothing and Nonparametric Regression, Marcel
Dekker, New York.
[2] Everitt, S., 1994, A Handbook of Statistical Analysis Using S-PLUSS, Chapman &
Hall, London.
[3] Graybill, F.A., 1969, Introduction to Matrices With Application in Statistics,
Wardsworth Publishing Company. Inc, California.
Jurnal Matematika 201340

[4] Hogg, R.V., McKean, J.W., and Craig, A.T., 2004, Introduction to Mathematical
Statistics (sixth edition), Prentice Hall.Inc, New York.
[5] Johnson, R. A. dan Wichern, D. W., 1998, Applied Multivariate Statistical
Analysis, Fourth Edition, A Viacom Company, United States of America.
[6] Lewis, F.L., and Vassilis, L., 1995, Optimal Control 2nd Edition, John Wiley &
Sons.
[7] Myers, R.H., Milton, J.S., 1991, A First Course in The Theory of Linear Statistical
Models, PWS-KENT Publishing Company, Boston.
[8] Ruppert, D., Wand, M.P., and Carroll, R.J., 2003, Cambridge Series in Statistical
and Probabilistic Maathematics: Semiparametric Regression, Cambridge
University Press, New York.
[9] Sukirno.S, 2008, Makroekonomi, Teori dan Pengantar Edisi 3,
RajaGrafindo Persada, Jakarta. [10] Walpole, R.E., 1995, Pengantar Statistika Edisi Ke-3, PT. Gramedia Pustaka
Utama, Jakarta.
[11] Wand, M.P, 2002, Smoothing and Mixed Models, a journal of smoothing methods.
[12] Wridght, G.B., 2003, Radial Basis Function Interpolation: Numerical and
Analytical Developments, a thesis of Mathematics, University of Colorado.
Jurnal Matematika 201341

1
SELESAIAN MODEL MATEMATIKA FRAKSIONAL MENGGUNAKAN METODE
PERTURBASI HOMOTOPI PADA SISTEM PREDASI TIGA SPESIES
Nur Widyawati, Moh. Imam Utoyo, Windarto
Departemen Matematika
Fakultas Sains dan Teknologi
Universitas Airlangga
Abstract. In an ecosystem, there are many organism interacting with other organism, similar
organism or other organism types, either one species or more. A relationship between prey and
predator called predation system. Predation system which consists of two species called Lotka-
Volterra models. There is also predation system which consists of three species. Predation system
of three species can be expressed in system of nonlinear differential equations. In general, system
of nonlinear differential equations difficult to find analytic solutions, so that it can be searched
using the solutions approach with stability analysis from equilibrium point. Other mathematical
models that are similar to system of nonlinier differential equations is system of fractional
differential equations. To get a system of differential equations of fractional, the order of the
system is modify the order on system of differential equations into fractional order α and β, 0 < α ≤
1 and 0 < β ≤ 1, as was done by Das and Gupta (2011). The system of differential equations of
fractional can be solved analytically using Homotopy Perturbation Method (HPM) approach. The
result is infinite series, further resolved numerically. From the result show that increase in the first
and second predator will result in a decrease in prey, while decrease in the first and second
predator will result in a increase in prey.
Keywords : Predation model of three species, fractional differential equations, Homotopy
perturbation method.
1. Pendahuluan Semua makhluk hidup memiliki hubungan yang saling bergantung satu sama lain. Masing-masing
individu berinteraksi dengan individu lain yang sejenis maupun lain jenis, baik satu spesies
maupun lebih. Dalam predasi terdapat pula proses mangsa-memangsa antar makhluk hidup.
Hubungan antara mangsa dan pemangsa disebut predasi. Hubungan ini sangat erat sebab tanpa
mangsa populasi pemangsa tidak dapat hidup. Pemangsa juga berfungsi sebagai pengontrol
populasi mangsa.
Kajian matematis mengenai predasi seperti tersebut di atas pertama kali di perkenalkan oleh
seorang ahli biofisika Amerika yaitu Alferd J. Lotka (1925) dan ahli matematika terkemuka dari
Italia yaitu Vito Volterra (1926), yang dikenal dengan model Lotka-Volterra. Selanjutnya beberapa
ahli matematika dan ekologi memberikan kontribusi dalam pengembangan teori ini (Reddy dan
Ramacharyulu, 2011).
Sistem predasi pada model Lotka-Volterra melibatkan dua spesies, akan tetapi ada juga sistem
predasi yang melibatkan tiga spesies. Dari tiga spesies tersebut, dapat dibagi menjadi dua
kelompok, yaitu satu mangsa dan dua pemangsa. Dua pemangsa saling bersaing satu sama lain
untuk mendapatkan mangsa. Selanjutnya sistem predasi tiga spesies tersebut dapat dinyatakan ke
dalam suatu sistem persamaan differensial nonlinier.
Pada umumnya, sistem persamaan differensial nonlinier sulit untuk dicari solusinya secara
analitik, sehingga dapat dicari melalui pendekatan solusi dengan analisis kestabilan dari titik
setimbangnya. Model matematika lainnya yang serupa dengan sistem persamaan differensial ini
adalah sistem persamaan differensial fraksional. Cara untuk mendapatkan model sistem persamaan
differensial fraksional adalah dengan memodifikasi sistem persamaan differensial nonlinier dengan
cara turunan pertama dari sistem persamaan differensial tersebut diganti dengan turunan
fraksional, seperti yang dilakukan oleh Das dan Gupta (2011).
Salah satu contoh model yang dimodifikasi oleh Das dan Gupta (2011) adalah model Lotka-
Volterra. Das dan Gupta memodifikasi sistem persamaan differensial model Lotka-Volterra
dengan cara turunan pertama dari sistem persamaan differensial tersebut diganti dengan turunan
fraksional order α dan β dengan 0 < α ≤ 1 dan 0 < β ≤ 1.
Berbeda dengan penyelesaian sistem persamaan differensial nonlinier, sistem persamaan
differensial fraksional dapat diselesaikan secara analitik. Salah satunya dengan menggunakan
Jurnal Matematika 201342

Metode Perturbasi Homotopi (HPM). Hasil penyelesaiannya berbentuk deret tak hingga yang
selanjutnya diselesaikan secara numerik (Hemeda, 2012).
Pada artikel ini, akan dimodifikasi model sistem predasi tiga spesies menjadi sistem persamaan
differensial fraksional serta menyelesaikannya menggunakan HPM
2. Model Predasi Tiga Spesies
Sistem predasi pada model Lotka-Volterra melibatkan dua spesies, akan tetapi ada juga sistem
predasi yang melibatkan tiga spesies. Dari tiga spesies tersebut dapat dibagi menjadi dua
kelompok, yaitu satu mangsa dan dua pemangsa. Dua pemangsa saling bersaing satu sama lain
untuk mendapatkan mangsa. Model predasi tiga spesies tersebut dalam suatu sistem persamaan
differensial nonlinier, yang dapat dinyatakan sebagai berikut :
dN1
dt= a1N1 − b11 N1
2 − b12N1N2 − b13N1N3
dN2
dt= −a2N2 − b22 N2
2 + b21 N1N2 − b23 N2N3 (2.2)
dN3
dt= −a3N3 − b33 N3
2 + b31 N1N3 − b32 N2N3
dengan notasi berikut :
N1 : populasi mangsa
N2 : populasi pemangsa pertama
N3 : populasi pemangsa kedua
a1 : laju pertumbuhan alami mangsa
b11 : laju penurunan mangsa, karena berkompetisi dengan sesama mangsa dalam memperebutkan
sumber daya yang terbatas
b12 : laju penurunan mangsa, karena dimangsa oleh pemangsa pertama
b13 : laju penurunan mangsa, karena dimangsa oleh pemangsa kedua
a2 : laju kematian alami pemangsa pertama
b22 : laju penurunan pemangsa pertama, karena berkompetisi dengan sesama pemangsa pertama
dalam memperebutkan sumber daya yang terbatas
b21 : laju peningkatan pemangsa pertama, karena berhasil memangsa mangsa
b23 : laju penurunan pemangsa pertama, karena berkompetisi dengan pemangsa kedua untuk
mendapatkan mangsa
a3 : laju kematian alami pemangsa kedua
b33 : laju penurunan pemangsa kedua, karena berkompetisi dengan sesama pemangsa kedua dalam
memperebutkan sumber daya yang terbatas
b31 : laju peningkatan pemangsa kedua, karena berhasil memangsa mangsa
b32 : laju penurunan pemangsa kedua, karena berkompetisi dengan pemangsa pertama untuk
mendapatkan mangsa
dengan :
𝑁1,𝑁2 ,𝑁3 ≥ 0 dan a1, a2, a3, 𝑏11 , 𝑏22 , 𝑏33 , 𝑏12 , 𝑏21 , 𝑏31 , 𝑏13 , 𝑏23 , 𝑏32 > 0. Dalam kasus ini,
diasumsikan bahwa ketiga spesies tidak bertemu dalam waktu yang bersamaan, tidak terjadi
mangsa memangsa antara pemangsa pertama dan kedua, namun terjadi persaingan antara
pemangsa pertama dan kedua untuk mendapatkan mangsa.
3. Persamaan Differensial Fraksional
Pada umumnya, sistem persamaan differensial nonlinier sulit untuk dicari solusinya secara
analitik, sehingga dapat dicari melalui pendekatan solusi dengan analisis kestabilan dari titik
setimbangnya. Model matematika lainnya yang serupa dengan sistem persamaan differensial ini
adalah sistem persamaan differensial fraksional. Cara untuk mendapatkan model sistem persamaan
differensial fraksional adalah dengan memodifikasi sistem persamaan differensial nonlinier dengan
cara turunan pertama dari sistem persamaan differensial tersebut diganti dengan turunan fraksional
order α dan β dengan 0 < α ≤ 1 dan 0 < β ≤ 1, seperti yang dilakukan oleh Das dan Gupta
(2011) pada model Lotka-Volterra.
Jurnal Matematika 201343

Dalam menyelesaikan sistem persamaan differensial order fraksional diperlukan beberapa definisi.
Definisi yang dimaksud adalah definisi Riemann-Liouville dan Caputo (Liu dan Xin, 2011).
Definisi 3.1 Integral fraksional Riemann-Liouville 𝐼𝛼 (α ≥ 0) untuk fungsi 𝑥 𝑡 didefinisikan
sebagai berikut :
𝐼𝛼𝑥 𝑡 =
1
𝛤 𝛼 𝑡 − 𝑠 𝛼−1𝑡
0
𝑥 𝑠 𝑑𝑠, 𝛼 > 0
𝑥 𝑡 𝛼 = 0
dengan Γ(.) merupakan fungsi Gamma.
(Weilbeer, 2005)
Definisi 3.2 Turunan fraksional Caputo 𝐷𝛼 dengan α > 0, t > 0 dan n ϵ ℕ untuk fungsi 𝑥 𝑡 didefinisikan sebagai
𝐷𝛼𝑥 𝑡 =
1
𝛤(𝑛 − 𝛼)
𝑥 𝑛 (𝜏)𝑑𝜏
(𝑡 − 𝜏)𝛼−𝑛+1
𝑡
0
, 𝑛 − 1 < 𝛼 < 𝑛
𝑥 𝑛 𝑡 , 𝛼 = 𝑛
dan salah satu sifat turunan fraksional Caputo adalah :
𝐼𝛼𝐷𝛼 𝑥 𝑡 = 𝑥 𝑡 − 𝑥 𝑘 (0)𝑡𝑘
𝑘!
𝑛−1
𝑘=0
(Kadem dan Baleanu, 2009)
Definisi 3.3 Fungsi Gamma didefinisikan sebagai
𝛤 𝑥 = 𝑡𝑥−1𝑒−𝑡𝑑𝑡∞
0
untuk x – 1 > -1 atau x > 0 berlaku sifat 𝛤 𝑥 + 1 = 𝑥𝛤 𝑥 . (Zill dan Cullen, 2009)
4. Metode Perturbasi Homotopi
Sistem persamaan differensial fraksional dapat diselesaikan secara analitik dengan menggunakan
HPM. Metode ini pertama kali diusulkan oleh He pada tahun 1998, dimana hasil penyelesaiannya
berbentuk deret tak hingga (Liu dan Xin, 2011).
Dalam menyelesaikan sistem persamaan differensial fraksional menggunakan HPM, langkah-
langkah yang dilakukan oleh Das dkk. (2011) adalah sebagai berikut :
a. Mengubah persamaan fraksional menjadi persamaan differensial homotopi.
b. Mengasumsikan bahwa solusi berupa suatu deret pangkat di p, dengan p ∈ [0,1] disebut
parameter embedding
c. Mensubstitusikan rangkaian deret pangkat di p ke sistem persamaan differensial homotopi.
d. Mengoperasikan persamaan differensial fraksional dengan operator integral fraksional
Riemann-Liouville 𝐼𝛼 dan 𝐼𝛽 (invers dari turunan Caputo 𝐷𝛼 dan 𝐷𝛽 ) pada kedua ruas,
sehingga didapatkan pendekatan solusi menggunakan HPM.
5. Metodelogi Penelitian
Dalam proses penelitian, untuk mencapai tujuan penelitian harus dilakukan melalui perangkat
metode penelitian. Adapun metode atau kerangka konseptual yang digunakan dalam penelitian
dapat diuraikan sebagai berikut:
1. Studi pustaka mengenai model predasi tiga spesies, persamaan differensial fraksional dan
Metode Perturbasi Homotopi (HPM).
2. Memodifikasi sistem persamaan differensial pada model predasi tiga spesies, sehingga
diperoleh model berbentuk sistem persamaan differensial order fraksional.
3. Menerapkan Metode Perturbasi Homotopi pada model predasi tiga spesies order fraksional
untuk mencari selesaian secara analitik. Langkah–langkahnya adalah sebagai berikut :
Jurnal Matematika 201344

a. Menentukan kondisi awal untuk tiga organisme tersebut.
b. Mengubah sistem persamaan differensial pada model predasi tiga spesies order fraksional
menjadi sistem persamaan differensial homotopi.
c. Memberikan asumsi bahwa solusi berupa suatu deret pangkat di p, dengan p ϵ [0,1] disebut
parameter embedding.
d. Mensubstitusikan rangkaian deret pangkat di p ke sistem persamaan differensial homotopi
yang dihasilkan dari (b).
e. Mengalikan rumus operator integral fraksional Riemann-Liouville dengan setiap hasil pada
langkah (d) di kedua ruas, maka didapatkan pendekatan solusi dari sistem persamaan
differensial model predasi tiga spesies dengan order fraksional, yang berupa deret tak
hingga.
4. Melakukan simulasi numerik dari sistem persamaan differensial order fraksional pada model
predasi tiga spesies.
5. Memberikan kesimpulan dari hasil perhitungan, baik secara analitik maupun numerik dengan
menggunakan Metode Perturbasi Homotopi.
6. Hasil dan Pembahasan
Model predasi tiga spesies dalam suatu sistem persamaan differensial nonlinier, dapat dinyatakan
sebagai berikut :
dN1
dt= a1N1 − b11N1
2 − b12 N1N2 − b13 N1N3
dN2
dt= −a2N2 − b22N2
2 + b21N1N2 − b23N2N3
dN3
dt= −a3N3 − b33N3
2 + b31N1N3 − b32N2N3 (6.1)
dengan :
𝑁1,𝑁2 ,𝑁3 ≥ 0 dan a1, a2, a3, 𝑏11 , 𝑏22 , 𝑏33 , 𝑏12 , 𝑏21 , 𝑏31 , 𝑏13 , 𝑏23 , 𝑏32 > 0.
Dengan mengikuti langkah-langkah yang dilakukan oleh Das dkk. (2011), sistem persamaan (6.1)
diubah menjadi sistem persamaan differensial order fraksional dengan syarat awal 𝑁1 0 =𝛿,𝑁2 0 = 𝜎,𝑁3 0 = 𝜌 dan 𝛿,𝜎,𝜌 > 0, sehingga persamaan (6.1) menjadi :
𝐷𝛼𝑁1 𝑡 = a1(t)N1(t) − b11 (t) N1(t) 2 − b12 (t)N1(t)N2(t) − b13 (t)N1(t)N3(t)
𝐷𝛽𝑁2 𝑡 = −a2(t)N2(t) − b22 (t) N2(t) 2 + b21 (t)N1(t)N2(t) − b23 (t)N2(t)N3(t)
𝐷𝛾𝑁3 𝑡 = −a3(t)N3(t) − b33 (t) N3 t 2
+ b31 (t)N1(t)N3(t) − b32 (t)N2(t)N3(t) (6.2)
dengan 0 < 𝛼 ≤ 1, 0 < 𝛽 ≤ 1 dan 0 < 𝛾 ≤ 1.
Selanjutnya, akan dicari selesaian dari sistem persamaan differensial fraksional pada model
predasi tiga spesies menggunakan HPM. Langkah-langkahnya adalah sebagai berikut :
a. Mengubah persamaan (6.2) menjadi persamaan differensial homotopi, sehingga persamaan
tersebut menjadi :
𝐷𝛼𝑁1 𝑡 = 𝑝 a1(t)N1(t) − b11 (t) N1(t) 2 − b12 (t)N1(t)N2(t) − b13 (t)N1(t)N3(t) (6.2a)
𝐷𝛽𝑁2 𝑡 = 𝑝 −a2(t)N2(t) − b22 (t) N2(t) 2 + b21 (t)N1(t)N2(t) − b23 (t)N2(t)N3(t) (6.2b)
𝐷𝛾𝑁3 𝑡 = 𝑝 −a3(t)N3(t) − b33 (t) N3(t) 2 + b31 (t)N1(t)N3(t) − b32 (t)N2(t)N3(t) (6.2c)
dengan p ∈ [0,1] disebut parameter embedding.
b. Mengasumsikan bahwa solusi dari persamaan (6.2a)-(6.2c) berupa suatu deret pangkat di 𝑝
yaitu :
𝑁1 𝑡 = 𝑁10(𝑡) + 𝑝𝑁11(𝑡) + 𝑝2𝑁12(𝑡) + 𝑝3𝑁13(𝑡) + ⋯ (6.3a)
𝑁2 𝑡 = 𝑁20(𝑡) + 𝑝𝑁21(𝑡) + 𝑝2𝑁22(𝑡) + 𝑝3𝑁23(𝑡) + ⋯ (6.3b)
𝑁3 𝑡 = 𝑁30(𝑡) + 𝑝𝑁31(𝑡) + 𝑝2𝑁32(𝑡) + 𝑝3𝑁33(𝑡) + ⋯ (6.3c)
c. Substitusi persamaan (6.3a)-(6.3c) ke persamaan (6.2a)-(6.2c), diperoleh persamaan
differensial fraksional sebagai berikut :
𝑝0: 𝐷∝𝑁10(𝑡) = 0, dengan 𝑁10 0 = 𝛿
𝑝1: 𝐷∝𝑁11(𝑡) =a1 t 𝑁10 (𝑡) − b11 t (N10(𝑡))2 − b12 t N10(𝑡)N20(𝑡) − b13 t N10(𝑡)N30(𝑡), dengan
𝑁11 0 = 0
Jurnal Matematika 201345

𝑝2: 𝐷∝𝑁12(𝑡) =a1 t 𝑁11 (𝑡) − 2b11 t N10(𝑡)N11(𝑡) − b12 t N10(𝑡)N21(𝑡) − b12 t N11(𝑡)N20(𝑡) −b13 t N10(𝑡)N31(𝑡) − b13 t N11(𝑡)N30(𝑡), dengan 𝑁12 0 = 0
𝑝3: 𝐷∝𝑁13(𝑡) =a1 t 𝑁12 (𝑡) − 2b11 t N10(𝑡)N12(𝑡) − b11 t (N11(𝑡))2 − b12 t N10(𝑡)N22(𝑡) −b12 t N11(𝑡)N21(𝑡) − b12 t N12(𝑡)N20(𝑡) − b13 t N10(𝑡)N32(𝑡) −b13 t N11(𝑡)N31(𝑡) − b13 t N12(𝑡)N30(𝑡), dengan 𝑁13 0 = 0
⋮ 𝑝0: 𝐷𝛽𝑁20(𝑡) = 0, dengan 𝑁20 0 = 𝜎
𝑝1: 𝐷𝛽𝑁21(𝑡) =−a2 t 𝑁20(𝑡) − b22 t (N20(𝑡))2 + b21 t N10(𝑡)N20(𝑡) − b23 (t)N20(𝑡)N30(𝑡) dengan
𝑁21 0 = 0
𝑝2: 𝐷𝛽𝑁22(𝑡) = −a2 t 𝑁21 (𝑡) − 2b22 t N20(𝑡)N21(𝑡) + b21 t N10(𝑡)N21(𝑡) +b21 t N11(𝑡)N20(𝑡) − b23 (t)N20(𝑡)N31(𝑡) − b23 (t)N21(𝑡)N30(𝑡), dengan 𝑁22 0 = 0
𝑝3: 𝐷𝛽𝑁23 𝑡 = −a2 t 𝑁22 (𝑡) − 2b22 t N20 𝑡 N22(𝑡) − b22 t (N21(𝑡))2 +b21 t N10(𝑡)N22(𝑡) + b21 t N11(𝑡)N21(𝑡) + b21 t N12(𝑡)N20(𝑡) −b23 t N20(𝑡)N32(𝑡) − b23 t N21(𝑡)N31(𝑡) − b23 t N22(𝑡)N30(𝑡), dengan dengan
𝑁23 0 = 0
⋮ 𝑝0: 𝐷𝛾𝑁30(𝑡) = 0, dengan 𝑁30 0 = 𝜌
𝑝1: 𝐷𝛾𝑁31(𝑡) =−a3 t 𝑁30(𝑡) − b33 t (N30(𝑡))2 + b31 t N10(𝑡)N30(𝑡) − b32 t N20(𝑡)N30(𝑡) dengan
𝑁31 0 = 0
𝑝2: 𝐷𝛾𝑁32(𝑡) = −a3 t 𝑁31(𝑡) − 2b33 t N30(𝑡)N31(𝑡) + b31 t N10(𝑡)N31(𝑡) +b31 t N11(𝑡)N30(𝑡) − b32 t N20(𝑡)N31(𝑡) − b32 t N21(𝑡)N30(𝑡), dengan 𝑁32 0 = 0
𝑝3: 𝐷𝛾𝑁33(𝑡) = −a3 t 𝑁32(𝑡) − 2b33 t N30(𝑡)N32(𝑡) − b33 t (N31(𝑡))2 +b31 t N10(𝑡)N32(𝑡) + b31 t N11(𝑡)N31(𝑡) + b31 t N12(𝑡)N30(𝑡) −b32 t N20(𝑡)N32(𝑡) − b32 t N21(𝑡)N31(𝑡) − b32 t N22(𝑡)N30(𝑡), dengan dengan
𝑁33 0 = 0
⋮ d. Dengan menerapkan operator integral fraksional Riemann-Liouville 𝐼𝛼 , 𝐼𝛽 dan 𝐼𝛾 (invers dari
turunan Caputo 𝐷𝛼 , 𝐷𝛽 dan 𝐷𝛾 ) di kedua ruas pada hasil dari (c), dapat diperoleh pendekatan
solusi menggunakan HPM. Solusi dari persamaan ini dapat diperoleh dengan menetapkan p =
1, yaitu :
𝑁1 𝑡 = 𝑁10(𝑡) + 𝑁11 (𝑡) + 𝑁12(𝑡) + 𝑁13(𝑡) + ⋯ (6.4a)
𝑁2 𝑡 = 𝑁20(𝑡) + 𝑁21(𝑡) + 𝑁22 (𝑡) + 𝑁23(𝑡) + ⋯ (6.4b)
𝑁3 𝑡 = 𝑁30(𝑡) + 𝑁31(𝑡) + 𝑁32 (𝑡) + 𝑁33(𝑡) + ⋯ (6.4c)
Hasil penyelesaiannya berbentuk deret tak hingga yang selanjutnya diselesaikan secara numerik.
Dalam artikel ini, telah diselesaikan dua kasus.
Kasus 1
Diberikan nilai-nilai dari parameter pada persamaan (6.1), yaitu :
𝑎1(𝑡) = 𝑎2(𝑡) = 𝑎3(𝑡) = 0.01𝑡, 𝑏11(𝑡) = 𝑏12(𝑡) = 𝑏13 (𝑡) = 𝑏22(𝑡) = 𝑏21(𝑡) = 𝑏23(𝑡) =𝑏33(𝑡) = 𝑏31(𝑡) = 𝑏32(𝑡) = 1 , dengan 𝑁1 0 = 𝛿, 𝑁2 0 = 𝜎 dan 𝑁3 0 = 𝜌 didapatkan :
𝑁10 𝑡 = 𝛿, 𝑁20(𝑡) = 𝜎 dan 𝑁30 = 𝜌
𝑁11 𝑡 =0.01𝛿𝑡𝛼+1
𝛤(𝛼+2)+
𝛿 −𝛿−𝜎−𝜌 𝑡𝛼
𝛤(𝛼+1), 𝑁21 𝑡 =
−0.01𝜎𝑡𝛽+1
𝛤(𝛽+2)+
𝜎 −𝜎+𝛿−𝜌 𝑡𝛽
𝛤(𝛽+1) dan 𝑁31 𝑡 =
−0.01𝜌𝑡𝛾+1
𝛤(𝛾+2)+
𝜌 −𝜌+𝛿−𝜎 𝑡𝛾
𝛤(𝛾+1)
𝑁12 𝑡 =(0.01)2𝛿(2+𝛼)𝑡2+2𝛼
𝛤(3+2𝛼)+
0.01 𝛿 −𝛿−𝜎−𝜌 (1+𝛼)−𝛿 2𝛿+𝜎+𝜌 𝑡1+2𝛼
𝛤(2+2𝛼)+
Jurnal Matematika 201346

𝛿2 2𝛿+3𝜎+3𝜌 +𝛿 𝜎2+𝜌2 +2(𝛿𝜎𝜌 ) 𝑡2𝛼
𝛤(1+2𝛼)+
0.01𝛿𝜎 𝑡𝛼+𝛽+1
𝛤(𝛼+𝛽+2)+
𝛿𝜎 𝜎−𝛿+𝜌 𝑡𝛼+𝛽
𝛤(𝛼+𝛽+1)+
0.01𝛿𝜌𝑡𝛼+𝛾+1
𝛤(𝛼+𝛾+2)+
𝛿𝜌 𝜌−𝛿+𝜎 𝑡𝛼+𝛾
𝛤(𝛼+𝛾+1)
𝑁22 𝑡 =(0.01)2𝜎(2+𝛽)𝑡2+2𝛽
𝛤(3+2𝛽)+
0.01 𝜎 𝜎−𝛿+𝜌 (1+𝛽)+𝜎 2𝜎−𝛿+𝜌 𝑡1+2𝛽
𝛤(2+2𝛽)+
𝜎2 2𝜎−3𝛿+3𝜌 +𝜎 𝛿2+𝜌2 −2(𝛿𝜎𝜌 ) 𝑡2𝛽
𝛤(1+2𝛽)+
0.01𝛿𝜎 𝑡𝛼+𝛽+1
𝛤(𝛼+𝛽+2)+
𝛿𝜎 −𝛿−𝜎−𝜌 𝑡𝛼+𝛽
𝛤(𝛼+𝛽+1)+
0.01𝜎𝜌 𝑡𝛽+𝛾+1
𝛤(𝛽+𝛾+2)+
𝜎𝜌 𝜌−𝛿+𝜎 𝑡𝛽+𝛾
𝛤(𝛽+𝛾+1)
𝑁32 𝑡 = (0.01)2𝜌(2+𝛾)𝑡2+2𝛾
𝛤(3+2𝛾)+
0.01 𝜌 𝜌−𝛿+𝜎 1+𝛾 +𝜌 2𝜌−𝛿+𝜎 𝑡1+2𝛾
𝛤(2+2𝛾)+
𝜌2 2𝜌−3𝛿+3𝜎 +𝜌 𝛿2+𝜎2 −2(𝛿𝜎𝜌 ) 𝑡2𝛾
𝛤(1+2𝛾)+
0.01𝛿𝜌𝑡𝛼+𝛾+1
𝛤(𝛼+𝛾+2)+
𝛿𝜌 −𝛿−𝜎−𝜌 𝑡𝛼+𝛾
𝛤(𝛼+𝛾+1)+
0.01𝜎𝜌 𝑡𝛽+𝛾+1
𝛤(𝛽+𝛾+2)+
𝜎𝜌 𝜎−𝛿+𝜌 𝑡𝛽+𝛾
𝛤(𝛽+𝛾+1)
Kasus 2
Diberikan nilai-nilai dari parameter pada persamaan (6.1), yaitu :
𝑎1(𝑡) = 𝑎2(𝑡) = 𝑎3(𝑡) = 1, 𝑏11(𝑡) = 𝑏12(𝑡) = 𝑏13(𝑡) = 𝑏22(𝑡) = 𝑏21(𝑡) = 𝑏23(𝑡) = 𝑏33(𝑡) =𝑏31(𝑡) = 𝑏32(𝑡) = 0.01𝑡 , dengan 𝑁1 0 = 𝛿, 𝑁2 0 = 𝜎 dan 𝑁3 0 = 𝜌 didapatkan :
𝑁10(𝑡) = 𝛿, 𝑁20(𝑡) = 𝜎 dan 𝑁30 = 𝜌
𝑁11 𝑡 =𝛿𝑡𝛼
𝛤(𝛼+1)+
0.01𝛿 −𝛿−𝜎−𝜌 𝑡𝛼+1
𝛤(𝛼+2),
𝑁21 𝑡 =−𝜎𝑡𝛽
𝛤(𝛽+1)+
0.01𝜎 −𝜎+𝛿−𝜌 𝑡𝛽+1
𝛤(𝛽+2)
𝑁31 𝑡 =−𝜌𝑡𝛾
𝛤(𝛾+1)+
0.01𝜌 −𝜌+𝛿−𝜎 𝑡𝛾+1
𝛤(𝛾+2)
𝑁12 𝑡 =(0.01)2𝛿 2𝛿2+3𝛿𝜎+3𝛿𝜌+𝜎2+𝜌2+2𝜎𝜌 (2+𝛼)𝑡2+2𝛼
𝛤(3+2𝛼)+
0.01 𝛿 −𝛿−𝜎−𝜌 +𝛿 −2𝛿−𝜎−𝜌 (1+𝛼) 𝑡1+2𝛼
𝛤(2+2𝛼)+
𝛿𝑡2𝛼
𝛤(1+2𝛼)+
0.01𝛿𝜎 (1+𝛽)𝑡𝛼+𝛽+1
𝛤(𝛼+𝛽+2)+
(0.01)2𝛿𝜎 𝜎−𝛿+𝜌 (2+𝛽)𝑡𝛼+𝛽+2
𝛤(𝛼+𝛽+3)+
0.01𝛿𝜌 (1+𝛾)𝑡𝛼+𝛾+1
𝛤(𝛼+𝛾+2)+
(0.01)2𝛿𝜌 𝜌−𝛿+𝜎 (2+𝛾)𝑡𝛼+𝛾+2
𝛤(𝛼+𝛾+3)
𝑁22 𝑡 =(0.01)2𝜎 2𝜎2−3𝜎𝛿+3𝜎𝜌+𝛿2+𝜌2−2𝛿𝜌 (2+𝛽)𝑡2+2𝛽
𝛤(3+2𝛽)+
0.01 𝜎 𝜎−𝛿+𝜌 +𝜎 2𝜎−𝛿+𝜌 1+𝛽 𝑡1+2𝛽
𝛤(2+2𝛽)+
𝜎𝑡2𝛽
𝛤(1+2𝛽)+
0.01𝛿𝜎 (𝛼+1)𝑡𝛼+𝛽+1
𝛤(𝛼+𝛽+2)+
(0.01)2𝛿𝜎 −𝛿−𝜎−𝜌 (2+𝛼)𝑡𝛼+𝛽+2
𝛤(𝛼+𝛽+3)+
0.01𝜎𝜌 (1+𝛾)𝑡𝛽+𝛾+1
𝛤(𝛽+𝛾+2)+
(0.01)2𝜎𝜌 𝜌−𝛿+𝜎 (2+𝛾)𝑡𝛽+𝛾+2
𝛤(𝛽+𝛾+3)
𝑁32 𝑡 =(0.01)2𝜌 2𝜌2−3𝛿𝜌+3𝜎𝜌+𝛿2+𝜎2−2𝛿𝜎 (2+𝛾)𝑡2+2𝛾
𝛤(3+2𝛾)+
0.01 𝜌 𝜌−𝛿+𝜎 +𝜌 2𝜌−𝛿+𝜎 1+𝛾 𝑡1+2𝛾
𝛤(2+2𝛾)+
𝜌𝑡2𝛾
𝛤(1+2𝛾)+
0.01𝛿𝜌 (1+𝛼)𝑡𝛼+𝛾+1
𝛤(𝛼+𝛾+2)+
(0.01)2𝛿𝜌 −𝛿−𝜎−𝜌 (2+𝛼)𝑡𝛼+𝛾+2
𝛤(𝛼+𝛾+3)+
0.01𝜎𝜌 (1+𝛽)𝑡𝛽+𝛾+1
𝛤(𝛽+𝛾+2)+
(0.01)2𝜎𝜌 𝜎−𝛿+𝜌 (2+𝛽)𝑡𝛽+𝛾+2
𝛤(𝛽+𝛾+3)
Dengan cara yang sama, selanjutnya akan didapatkan solusi perkiraan dari persamaan (6.4a)-
(6.4c).
7. Solusi Numerik
Hasil numerik dari populasi pemangsa dan mangsa untuk kasus 1 dan 2 dengan berbagai nilai α, β
dan γ yang dihitung untuk berbagai nilai waktu t. Dengan mengasumsikan nilai 𝛿 = 7,𝜎 = 5 dan
𝜌 = 2, maka dapat diketahui hasil numerik dari populasi pemangsa dan mangsa untuk kasus 1 dan
2. Hasil ini disajikan secara grafik melalui Gambar 4.1–Gambar 4.4. Gambar 4.1-Gambar 4.2 yang
Jurnal Matematika 201347
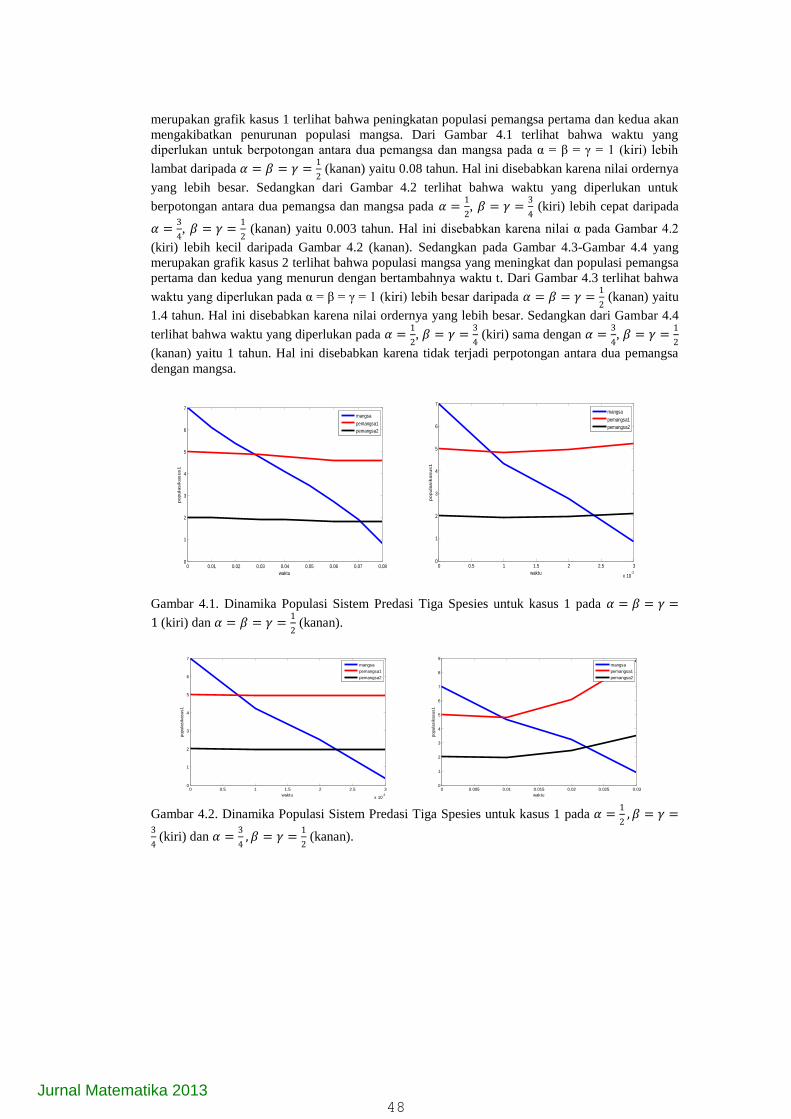
merupakan grafik kasus 1 terlihat bahwa peningkatan populasi pemangsa pertama dan kedua akan
mengakibatkan penurunan populasi mangsa. Dari Gambar 4.1 terlihat bahwa waktu yang
diperlukan untuk berpotongan antara dua pemangsa dan mangsa pada α = β = γ = 1 (kiri) lebih
lambat daripada 𝛼 = 𝛽 = 𝛾 =1
2 (kanan) yaitu 0.08 tahun. Hal ini disebabkan karena nilai ordernya
yang lebih besar. Sedangkan dari Gambar 4.2 terlihat bahwa waktu yang diperlukan untuk
berpotongan antara dua pemangsa dan mangsa pada 𝛼 =1
2, 𝛽 = 𝛾 =
3
4 (kiri) lebih cepat daripada
𝛼 =3
4, 𝛽 = 𝛾 =
1
2 (kanan) yaitu 0.003 tahun. Hal ini disebabkan karena nilai α pada Gambar 4.2
(kiri) lebih kecil daripada Gambar 4.2 (kanan). Sedangkan pada Gambar 4.3-Gambar 4.4 yang
merupakan grafik kasus 2 terlihat bahwa populasi mangsa yang meningkat dan populasi pemangsa
pertama dan kedua yang menurun dengan bertambahnya waktu t. Dari Gambar 4.3 terlihat bahwa
waktu yang diperlukan pada α = β = γ = 1 (kiri) lebih besar daripada 𝛼 = 𝛽 = 𝛾 =1
2 (kanan) yaitu
1.4 tahun. Hal ini disebabkan karena nilai ordernya yang lebih besar. Sedangkan dari Gambar 4.4
terlihat bahwa waktu yang diperlukan pada 𝛼 =1
2, 𝛽 = 𝛾 =
3
4 (kiri) sama dengan 𝛼 =
3
4, 𝛽 = 𝛾 =
1
2
(kanan) yaitu 1 tahun. Hal ini disebabkan karena tidak terjadi perpotongan antara dua pemangsa
dengan mangsa.
Gambar 4.1. Dinamika Populasi Sistem Predasi Tiga Spesies untuk kasus 1 pada 𝛼 = 𝛽 = 𝛾 =
1 (kiri) dan 𝛼 = 𝛽 = 𝛾 =1
2 (kanan).
Gambar 4.2. Dinamika Populasi Sistem Predasi Tiga Spesies untuk kasus 1 pada 𝛼 =1
2,𝛽 = 𝛾 =
3
4 (kiri) dan 𝛼 =
3
4,𝛽 = 𝛾 =
1
2 (kanan).
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080
1
2
3
4
5
6
7
waktu
popula
sik
asus1
mangsa
pemangsa1
pemangsa2
0 0.5 1 1.5 2 2.5 3
x 10-3
0
1
2
3
4
5
6
7
waktu
popula
sik
asus1
mangsa
pemangsa1
pemangsa2
0 0.5 1 1.5 2 2.5 3
x 10-3
0
1
2
3
4
5
6
7
waktu
popula
sik
asus1
mangsa
pemangsa1
pemangsa2
0 0.005 0.01 0.015 0.02 0.025 0.030
1
2
3
4
5
6
7
8
9
waktu
popula
sik
asus1
mangsa
pemangsa1
pemangsa2
Jurnal Matematika 201348

Gambar 4.3. Dinamika Populasi Sistem Predasi Tiga Spesies untuk kasus 2 pada 𝛼 = 𝛽 = 𝛾 =
1 (kiri) dan 𝛼 = 𝛽 = 𝛾 =1
2 (kanan).
Gambar 4.4. Dinamika Populasi Sistem Predasi Tiga Spesies untuk kasus 2 pada 𝛼 =1
2,𝛽 = 𝛾 =
3
4 (kiri) dan 𝛼 =
3
4,𝛽 = 𝛾 =
1
2 (kanan).
8. Kesimpulan dan Saran
Pada artikel ini, Penulis telah memodifikasi model sistem predasi tiga spesies menjadi persamaan
differensial fraksional. Selanjutnya Penulis mencari selesaian dari persamaan differensial
fraksional pada model tersebut secara analitik dan numerik menggunakan Metode Perturbasi
Homotopi (HPM). Dengan menggunakan HPM, hasil simulasi numerik untuk sistem persamaan
differensial order fraksional yang dihasilkan dari perhitungan secara analitik menunjukkan bahwa
peningkatan populasi pemangsa pertama dan kedua akan mengakibatkan penurunan populasi
mangsa. Selanjutnya, penurunan populasi pemangsa pertama dan kedua akan diikuti dengan
peningkatan populasi mangsa. Tingkat akurasi selesaian model menggunakan HPM akan
meningkat dengan semakin banyaknya suku-suku yang disertakan pada metode HPM. Nilai
parameter pada model sistem predasi dapat diestimasi apabila tersedia sejumlah data pengamatan.
9. Daftar Pustaka
Cui, Z. dan Yang, Z., 2013, Metode Perturbasi Homotopi Applied to The Solution of
Fraksional Lotka-Volterra Equations with Variable Coefficients, China : Institute of
Mathematics, School of Mathematical Sciences, Nanjing Normal University, Jiangsu
Nanjing 210023, Journal of Modern Methods in Numerical Mathematics 2013 1-9.
0 0.2 0.4 0.6 0.8 1 1.2 1.40
5
10
15
20
25
waktu
popula
sik
asus2
mangsa
pemangsa1
pemangsa2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
waktu
popula
sik
asus2
mangsa
pemangsa1
pemangsa2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
waktu
popula
sik
asus2
mangsa
pemangsa1
pemangsa2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
waktu
popula
sik
asus2
mangsa
pemangsa1
pemangsa2
Jurnal Matematika 201349

Das, S., Gupta, P. K., Vishal, K., 2010, Approximate Approach to the Das Model of Fraksional
Logistic Population Growth, Applications and Applied Mathematics : An International
Journal (AAM), Vol. 05, Issue 10, pp. 1702 – 1708.
Das, S. dan Gupta, P.K., 2011, A mathematical model on fraksional Lotka Volterra equations,
India : Department of Applied Mathematics, Institute of Technology, Banaras Hindu
University, Journal of Theoretical Biology 277 (2011) 1-6.
Gubu, L., 2011, Perilaku Penyelesaian Persamaan Lotka-Volterra Akibat Waktu Tunda (Time
Delay), Kendari : Jurusan Matematika FMIPA Universitas Haluoleo Kampus Bumi
Tridharma Anduonohu, JIMT, vol. 8, No.1, Mei 2011 : 14-25.
Hemeda, A., 2012, Metode Perturbasi Homotopi for Solving Partial Differensial Equations of
Fraksional Order, Int.Journal of Math. Analysis, Vol. 6, 2012, no. 49, 2431 – 2448.
Jin, L., 2008, Metode Perturbasi Homotopi for Solving Partial Differensial Equations with
Variable Coefficients, China : Modern Educational Technology Center Zhejiang
Gongshang University . Int. J. Contemp. Math. Sciences, Vol. 3, no. 28, 1395 – 1407.
Liao, 2004, Beyond Pertubation: Introduction to the Homotopy Analysis Method. Boca Raton,
New York Washington,D.C.
Liu, Y. dan Xin, B., 2011, Numerical Solutions of a Fraksional Pemangsa-Mangsa System,
Hindawi Publishing Corporation Advances in Difference Equations, Volume 2011.
Kadem, A. dan Baleanu, D., 2009, Homotopy Perturbation Method for the Coupled Fractional
Lotka-Volterra Equations.
Reddy, K.S., dan Ramacharyulu,N.,Ch.,P., 2011, A Three Species Ecosystem Comprising of
Two Predators Competing for a Prey, India : Institute of Engineering and Technology,
Advances in Applied Science Research, Pelagia Research Library, 2(3) : 208 – 218.
Wielber, M., 2005, Efficient Numerical Methods for Fractional Differential Equations and
their Analytical Background, Jerman : Universitat Braunschweig.
Zill, D. G. dan Cullen, M. R., 2009, Differential Equations with Boundary-Value Problems
Seventh Edition.
Jurnal Matematika 201350

DETEKSI KELAINAN OTAK HASIL MANETIC RESONANCE IMAGING (MRI) OTAK
MENGGUNAKAN FIREFLY ALGORITHM PADA PELATIHAN JARINGAN RADIAL
BASIS FUNCTION
Nuri Fashichah, Auli Damayanti, Herry Suprajitno
Depertemen Matematika, Fakultas Sains dan Teknologi, Kampus C
Universitas Airlangga, Jl. Mulyorejo, Surabaya
Abstract. Radial Basis Function Networks is one of the methods of artificial neural networks are
used to detect abnormalities in the brain through images of magnetic resonance imaging (MRI) of
the brain. MRI images of the brain previously performed image processing to get the pattern for
the introduction of the network training process. Image processing used are grayscale and
histogram equalization. The results of image processing is used as input to the training martiks
networks using Radial Basis Funtion Firefly Algorithm. In the training process to obtain the
optimal parameters for validation test on the test data. Training data in this paper uses 20 brain
MRI data and the validation test process using brain MRI data 8. The results of the training
process with values obtained Means Square Error as 3,4734E-07, and the optimal parameters can
detect data on the validity of the validation test with the percentage of 100%. Detection of brain
abnormalities was designed using the Java programming language NetBeans IDE 7.0.1 and
Microsoft Office 2003 to store data and image results.
Keywords : Radial Basis Function, Firefly Alorithm, Magnetic Resonance Imaging
1. Pendahuluan
Kelainan dapat diketahui dengan hasil rekaman Magnetic Resonance Imaging (MRI).
Seringkali setelah seorang mendapat hasil MRI, ia masih harus menunggu ahli radiolog atau
dokter untuk mendapat diagnosa dari gambaran kelainan yang ada. Salah satu tugas seorang dokter
dan ahli radiolog yang penting dan cukup sulit adalah ketika mendeteksi dan mendiagnosa
kelainan otak. Hal ini dapat disebabkan karena otak merupakan organ tubuh yang letaknya
tersembunyi sehingga sulit dideteksi dengan mata telanjang atau dapat disebabkan karena
rendahnya kualitas gambar yang diperoleh atau bahkan juga disebabkan karena faktor
subyektivitas dan kriteria pengambilan keputusan yang berbeda antara dokter atau ahli radiolog.
Oleh karena itu, perlu dikembangkan suatu computer aided diagnoses yang mempunyai
kemampuan untuk membantu dokter atau ahli radiolog dalam mengambil keputusan pendeteksian
kelainan pada otak. Computer aided dianoses sendiri proses pengambilan keputusannya sama
dengan proses berfikir manusia.
Jaringan saraf tiruan merupakan salah satu representasi buatan dari otak manusia yang selalu
mencoba mensimulasikan proses pembelajaran pada otak manusia. Jaringan saraf tiruan sederhana
dikenalkan pertama kali oleh McCulloch dan Pitts pada tahun 1943 (Fausett, 1994). Pada tahun
1990-an telah dikembangkan aplikasi model jaringan saraf tiruan untuk menyelesaikan berbagai
persoalan di dunia nyata seperti pada tahun 2010, Wu, Warwick, Jonathan, Burgess, Pan & Aziz,
menerapkan jaringan Radial Basis Function (RBF) untuk prediksi penyakit Parkinson tremor
onset. Menurutnya, jaringan saraf ini memiliki keunggulan diantaranya struktur jaringan RBF
sederhana dan kecepatan pembelajarannya lebih cepat sehingga iterasi berjalan cepat. Pada
penelitian sebelumnya, dilakukan beberapa algoritma metaheuristik sebagai pelatihan dalam
proses pengklasifikasian penyakit dengan metode jaringan saraf Radial Basis Function oleh Horng
dkk (2012). Menurut Broersma (2010), keunggulan dari Firefly Algorithm (FA), semua variabel
yang terbentuk pada persamaan pergerakan firefly menjamin cara kerja algoritma cepat menuju
solusi yang optimal.
2. Pengolahan Citra
Menurut Hermawati (2013), Citra atau gambar dapat didefinisikan sebagai sebuah fungsi dua
dimensi, ( ), dimana dan adalah koordinat bidang datar, dan fungsi di setiap pasangan
koordinat ( ) disebut intensitas atau level keabuan (greyscale) dari gambar titik itu dengan
Jurnal Matematika 201351

diasumsikan bahwa citra f(x,y) mempunyai baris M dan kolom N. Citra digital dapat ditulis dalam
bentuk matriks sebagai berikut :
( ) [ ( ) ( )
( ) ( )
] (1)
a. Proses Grayscale
Proses awal yang banyak dilakukan dalam image processing adalah mengubah citra berwarna
menjadi gray-scale. Hal ini digunakan untuk menyederhanakan model dari citra. Seperti yang
telah dijelaskan di atas, citra berwarna terdiri dari 3 layer matrik, yaitu R-layer (r), G-layer (g),
dan B-layer (b) dengan nilai suatu citra dipresentasikan antara 0 sampai 255. Sehingga untuk
melakukan proses-proses selanjutnya tetap diperhatikan tiga layer diatas. Bila proses perhitungan
dilakukan menggunakan tiga layer, berarti dilakukan tiga perhitungan yang sama. Sehingga konsep
itu diubah dengan mengubah 3 layer diatas menjadi 1 layer matrik gray-scale (s) dan hasilnya
adalah citra gray-scale. Dalam citra ini tidak ada lagi warna, yang ada adalah derajat keabuan.
(2)
(Basuki dkk., 2005)
b. Histogram Equalization
Histogram equalization adalah suatu proses perataan histogram, dengan distribusi nilai
derajat keabuan pada suatu citra dibuat rata. Untuk dapat melakukan histogram equalization
diperlukan suatu fungsi distribusi kumulatif yang merupakan kumulatif dari histogram.
Nilai hasil histogram equalization adalah sebagai berikut :
(3)
dengan :
= nilai keabuan hasil histogram equalization
= histogram kumulatif dari
= threshold derajat keabuan (256)
= ukuran gambar
(Basuki dkk. , 2005)
3. Radial Basis Function
Jaringan Fungsi Basis Radial (RBF) merupakan alternatif dari jaringan Multilayered
Feedforward Neural (MFN) telah dikembangkan. Jaringan ini terdiri dari tiga layer yaitu input
layer, hidden layer dan output layer. Fungsi aktivasinya adalah fungsi basis dan fungsi linear pada
lapisan output. Jaringan ini telah banyak digunakan secara intensif. RBF merupakan pemetaan
fungsi taklinier multidimensional yang tergantung kepada jarak antara vektor input dan vektor
center (Jariah dkk, 2011).
Gambar 1. Arsitektur Jaringan RBF
Jurnal Matematika 201352

Jaringan Saraf Radial Basis Function merupakan suatu model jaringan saraf multilayer yang
menggunakan dua metode pembelajaran dalam proses trainingnya, yaitu pembelajaran
unsupervised dari input layer menuju ke layer hidden dan pembelajaran supervised dari hidden
layer menuju ke output layer menuju ke output layer. Pada Gambar 1, menunjukkan struktur rinci
dari jaringan RBF . Setiap data input x dengan m dimensi , x = ( x1 , x2 , ..... , xm ), yang terletak di
input layer, yang diteruskan pada hidden layer. Hidden layer memiliki I neuron dan masing-
masing neuron merupakan jarak antara center dan input.
Setiap fungsi aktivasi neuron pada hidden layer akan menjadi fungsi Gaussian yang
ditandai dengan vektor rata-rata dari center (ci) dan penyebaran parameter (αi) dengan i= 1, 2, ...,
I. Sehingga fungsi aktivasi yang diberikan sebagai berikut :
( ) || ||
(4)
dengan demikian, nilai output dari neuron j dari output layer yj untuk pelatihan sampel x diberikan
oleh oj .
∑ ( )
(5)
Bobot wij ( i = 1,2 , ... , I. , j = 1,2 , ... , J ), adalah node ke i output dari hidden layer yang
ditransmisikan node ke j output layer, dan adalah parameter bias node ke j dari output layer
yang ditentukan ditentukan oleh prosedur pelatihan jaringan RBF .
Dalam prakteknya , pelatihan prosedur RBF adalah untuk menemukan parameter wij, , , dan
sehingga mendapatkan nilai Mean Square Error (MSE) minimum.
∑ || ( ) ( )||
(6)
dengan ( ) dan ( ) adalah output vektor yang diinginkan dan vektor output aktual untuk
sampel pelatihan xi, sedangkan N adalah jumlah sampel pelatihan. (Horng dkk., 2012)
Setelah diperoleh parameter-parameter RBF pada proses training pertama dan nilai fungsi
aktivasi Gaussian pada hidden layer, proses training selanjutnya yaitu pembelajaran supervised
dapat dilakukan serupa dengan feedforward, yaitu pada output layer dilakukan komputasi linier
untuk mendapatkan hasil keluaran yang merupakan penjumlahan dari hasil perkalian bobot dengan
nilai Gaussian (dari unit hidden) (Bishop, 1995).
4. Firefly Algorithm
Algoritma kunang-kunang adalah sebuah algoritma metaheuristik yang terinspirasi dari
perilaku berkedip-kedip kunang-kunang. Tujuan utama berkedipnya kunang-kunang adalah untuk
menarik kunang-kunang yang lainnya. Algoritma kunang-kunang adalah sebagai berikut (Yang,
2010) :
1. Semua kunang-kunang itu unisex, jadi suatu kunang-kunang akan tertarik pada kunang-
kunang yang lain berdasarkan tinkat kecerahannya.
2. Daya tarik sebanding dengan tingkat kecerahan kunang-kunang, kunang-kunang dengan
tingkat kecerahan lebih rendah akan tertarik dan bergerak ke kunang-kunang dengan
tingkat kecerahan lebih tinggi, kecerahan dapat berkurang seiring dengan bertambahnya
jarak dan adanya penyerapan cahaya akibat faktor udara.
3. Kecerahan atau intensitas cahaya kunang-kunang ditentukan oleh nilai fungsi tujuan dari
masalah yang diberikan. Untuk masalah maksimisasi, intensitas cahaya sebanding dengan
nilai fungsi tujuan.
a. Keatraktifan Firefly
Ada dua hal yang berkaitan dan sangat penting dalam algoritma kunang-kunang yatu
intensitas cahaya dan fungsi keatraktifan. Diasumsikan bahwa keatraktifan dipengaruhi tingkat
itensitas cahaya. Untuk kasus pada artikel ini adalah masalah optimasi maksimum, tingkat itensitas
cahaya pada sebuah kunang-kunang x dapat dilihat sebagai,
( ) ( ) (7)
Jurnal Matematika 201353

dengan nilai I merupakan tingkat itensitas cahaya pada x kunang-kunang yang sebanding terhadap
solusi fungsi tujuan permasalahan yang akan dicari f(x). Keatraktifan yang bernilai relatif,
karena itensitas cahaya yang harus dilihat dan dinilai oleh kunang-kunang lain. Dengan demikian,
hasil penilaian akan berbeda tergantung dari jarak antara kunang-kunang yang satu dengan yang
lainnya ( ) Selain itu, itensitas cahaya akan menurun dilihat dari sumbernya dikarenakan
terserap oleh media contohnya udara . (Yang, 2010)
Fungsi keatraktifan ialah sebagai berikut :
( ) (8)
dengan :
: nilai keatraktifan kunang-kunang awal
: koefisien penyerapan cahaya
r : jarak antar kunang-kunang
b. Jarak Antara Firefly
Jarak antara kunang-kunang i dan j pada lokasi x, xi, dan xj dapat ditentukan ketika
dilakukannya peletakan titik dimana firefly tersebut disebar secara random dalam diagram
kartesius dengan rumus (Yang, 2010) :
‖ ‖ √∑( )
(9)
dengan adalah komponen ke k dari dari firefly ke-i dan adalah komponen ke k dari xj
dari firefly ke-j. Dalam kasus 2-dimensi kita punyai √( ) ( )
.
c. Pergerakan Firefly
Pergerakan kunang-kunang i yang bergerak menuju tingkat itensitas cahaya yang terbaik
dapat dilihat dari persamaan berikut (Yang, 2010) :
( ) ( ) (
)
(10)
dengan variabel awal xi menunjukkan posisi awal kunang-kunang yang berada pada lokasi x,
kemudian persamaan kedua yang terdiri dari variabel = 1,0 variabel ini merupakan nilai
keatraktifan awal pada firefly, variabel (exp) bilangan eksponensial, variabel = 1,0 merupakan
nilai untuk tingkat penyerapan pada lingkungan sekitar firefly yaitu udara dan terakhir rij
merupakan variabel selisih jarak awal antara firefly i dan j. Semua variabel pada persamaan kedua
tersebut diberikan dari fungsi keatraktifan firefly yang mana menentukan tingkat kecerahan.
Selanjutnya persamaan ketiga terdiri dari selisih nilai solusi pada firefly i terhadap firefly j.
Kemudian fungsi persamaan pergerakan firefly secara random menunjukkan adanya bilangan
random yang kisarannya antara [0,1]. variabel α yang memiliki kisaran antara [0,1] biasa
ditentukan dengan nilai 0,2. Semua variabel yang terbentuk pada persamaan pergerakan firefly
menjamin cara kerja algoritma cepat menuju solusi yang optimal (Broersma, 2010).
Jurnal Matematika 201354

5. Pelatihan Jaringan Radial Basis Function Menggunakan Firefly Algorithm
Gambar 2. Flowchart FA-RBF
Berdasarkan Gambar 2, langkah-langkah FA-RBF sebagai berikut :
a. Menginputkan matriks hasil normalisasi. Hasil normalisasi didapatkan dari proses
pengolahan citra.
b. Menginputkan parameter-parameter FA dan JST. Parameter FA adalah jumlah
populasi kunang-kunang, Sedangkan parameter RBF adalah batas error
dan maksimal iterasi.
c. Membangkitkan populasi awal pada FA. Populasi yang dibangkitkan merupakan
bobot dan bias yang akan digunakan dalam RBF. Pembangkitan populasi awal FA
dengan nilai random antara 0 sampai 1.
d. Konversi individu dalam FA menjadi bobot dalam RBF. Bobot pada RBF berupa
center, alfa, wij, dan bias.
e. Menghitung Mean Square Error (MSE) dengan proses RBF sebagai penentuan
awal fitnes FA.
Dalam penulisan ini, hanya terdiri dari 3 lapisan, yaitu sebuah input layer, hidden
layer, dan sebuah output layer. Rancangan jumlah nodenya sebagai berikut :
i. Input layer sebanyak 1 lapisan, sedangkan node pada lapisan sebanyak
data (1600 unit).
ii. Hidden layer sebanyak 1 lapisan, sedangkan node pada lapisan
sebanyak data (40 unit).
iii. Output layer sebanyak 1 lapisan, sedangkan node pada lapisan
sebanyak 1 unit.
f. Cek apakah nilai MSE yang diperoleh kurang dari batas error atau apakah sudah
mencapai batas maksimum iterasi. Jika iterasi sudah mencapai maksimum iterasi
Start
Konversi individu dalam FA menjadi bobot dan bias RBF
Input matriks hasil normalisasi
Input parameter FA dan RBF
Populasi awal FA
Menghitung MSE dengan proses RBF
MSE < Batas Eror or maksimum
iterasi
Individu dengan bobot optimal
End
Populasi Baru FA
Pergerakan Firefly
tidak
ya
Hitung nilai fitness
Jurnal Matematika 201355

atau MSE yang diperoleh kurang dari batas error, maka individu kunang-kunang
dianggap sudah optimal. Jika tidak, proses dilanjutkan dengan menghitung nilai
fitness dari tiap-tiap individu kunang-kunang tersebut dan menentukan intensitas
cahaya Firefly dengan memaksimumkan nilai fitnes. Nilai fitnness pada setiap
Firefly ditentukan oleh persamaan (11).
f(x) =
(11)
g. Membandingkan nilai intensitas cahaya tiap Firefly dengan Firefly lainnya,
intensitas cahaya firefly yang lebih terang akan didekati nilai intensitas firefly yang
lain. Kemudian menghitung nilai pergerakan kunang-kunang pada kunang-kunang
yang mempunyai nilai intensitas kecerahan tinggi.
h. Pada update pergerakan kunang-kunang akan didapat populasi baru pada kunang-
kunang, kemudian lakukan proses d.
6. Hasil dan Pembahasan
Data yang digunakan dalam artikel ini menggunakan data gambar hasil Magnetic Resonance
Imaging (MRI) Otak Manusia dari http://www.med.harvard.edu/aanlib. Sebanyak 20 data
digunakan untuk proses pelatihan jaringan dan 8 data digunakan sebagai data uji validasi. Proses
awal yang harus dilakukan sebelum proses training dan validasi adalah pengolahan citra.
Pengolahan citra terdiri dari proses grayscale dan histogram equalization. Hasil Numerik dari
pengolahan citra kemudian dinormalisasi dengan setiap nilai pixel dibagi dengan nilai intensitas
warna tertinggi yaitu 255.
Proses selanjutnya adalah proses training pada jaringan RBF dengan menggunakan FA.
Parameter pada FA berupa koefisien udara, koefisien random, nilai keatraktifan awal kunang-
kunang dan banyaknya individu, sedangkan parameter pada RBF berupa maksimum error. Setelah
menginisialisasi parameter tahapan selanjutnya adalah pembangkitan nilai individu tiap kunang-
kunang dengan menggunakan pembangkitan bilangan random antara 0 sampai 1. Setiap individu
kunang-kunang mewakili untaian-untaian parameter yang digunakan untuk proses RBF, yaitu
center, alfa, wij, bias. Hal ini dikarenakan matriks input dari hasil normalisasi bernilai kisaran
antara 0 sampai 1.
Struktur jaringan pada RBF terdiri dari 3 layer yaitu input layer sebanyak 1600 neuron,
hidden layer sebanyak 40 neuron, dan output layer sebanyak 1 neuron. Dalam proses pelatihan,
nilai MSE pada RBF digunakan sebagai komponen nilai fitness pada FA. FA sendiri berfungsi
untuk memperbarui nilai parameter-parameter RBF sehingga menghasilkan nilai parameter-
parameter yang optimal.
Pelatihan jaringan pada data MRI menggunakan FA dilakukan dengan menentukan beberapa
parameter. Parameter untuk FA adalah banyak individu, koefisien udara, koefisien nilai random,
nilai keatraktifan awal, sedangkan untuk parameter RBF adalah batas error dan maksimum iterasi.
Banyak individu diatur dengan nilai 10, 30, 50, maksimum iterasi diatur dengan 1000 iterasi dan
maksimal error diatur dengan nilai 0,000001. Kemudian diperoleh bobot yang optimal dari
parameter-parameter RBF meliputi .
Pada proses percobaan sebanyak 81 macam percobaan dengan 3 variasi masing parameter. Variasi
parameter untuk individu yaitu 10, 30, 50, parameter untuk koefisien udara yaitu 0,5, 1, 1,5,
parameter untuk koefien nilai random yaitu 0,2, 0,5, 0,8, sedangkan untuk parameter atraktif awal
0,5, 1, 1,5. Pengambilan data terbaik berdasarkam nilai MSE terkecil dan hasil iterasi terkecil,
sehingga MSE terkecil adalah 1,4137E-10 dengan 30 iterasi didapatkan dari variasi individu
sebesar 10, koefisien udara sebesar 0,5, koefisien nilai random sebesar 0,5, dan keatraktifan awal
kunang-kunang sebesar 1,5. Iterasi terkecil adalah 3 dengan nilai MSE sebesar 6,8610E-07,
3,4734E-07, dan 4,9867E-07. Nilai MSE sebesar 6,8610E-07 didapatkan dari variasi individu
sebesar 50, koefisien udara sebesar 0,5, koefisien nilai random sebesar 0,2, dan keatraktifan awal
kunang-kunang sebesar 0,5. Nilai MSE sebesar 3,4734E-07 didapatkan dari variasi individu
sebesar 50, koefisien udara sebesar 1, koefisien nilai random sebesar 0,5, dan keatraktifan awal
kunang-kunang sebesar 0,5. Nilai MSE sebesar 4,9867E-07 didapatkan dari variasi individu
sebesar 50, koefisien udara sebesar 1,5, koefisien nilai random sebesar 0,8, dan keatraktifan awal
kunang-kunang sebesar 0,5. Beberapa bobot yang optimal kemudian digunakan untuk menguji
data validasi sebanyak 8 citra, hasil pengujian dapat ditunjukkan pada tabel 1.
Jurnal Matematika 201356

Tabel 1 Hasil uji validasi pada data testing training terbaik
No.
Individu
Koefisien
Udara
Koefisien
Random
Atraktif
Awal
MSE
Iter
asi
Presentase
Hasil Uji
1 10 0,5 0,5 1,5 1,4137E-10 30 50%
2 50 0,5 0,2 0,5 6,8610E-07 3 100%
3 50 1 0,5 0,5 3,4734E-07 3 100%
4 50 1,5 0,8 0,5 4,9867E-07 3 50%
Pada tabel 4.5 terdapat 2 jenis variasi parameter dengan presentase hasil uji 100%, tetapi nilai
MSE terkecil yaitu 3,4734E-07, sehingga bobot optimal yang digunakan adalah saat individu
sebanyak 50, koefisien udara 1, koefisien nilai random sebanyak 0,5 dan nilai keatraktifan awal
sebanyak 0,5.
Gambar 3. Grafik Perubahan MSE saat individu 50, koefisien udara 1, koefisien nilai random
sebanyak 0,5 dan nilai keatraktifan awal sebanyak 0,5
7. Kesimpulan
Berdasarkan pada pembahasan diatas, maka dapat ditarik beberapa kesimpulan yaitu dalam
mengimplementasikan Firefly Algorithm pada pelatihan jaringan Radial Basis Function yang
dapat mendeteksi kelainan otak hasil Magnetic Resonance Imaging (MRI) otak. Pada proses
pelatihan jaringan digunakan data pelatihan sebanyak 20 citra MRI, MSE terkecil yaitu 3,4734E-
07, sehingga bobot optimal yang digunakan adalah saat individu sebanyak 50, koefisien udara 1,
koefisien nilai random sebanyak 0,5 dan nilai keatraktifan awal sebanyak 0,5 diperoleh dari hasil
iterasi sebanyak 3 kali iterasi dapat mendeteksi semua data pada proses pelatihan dengan
presentasi kevalidan sebesar 100%. Pada proses uji validasi dengan 8 citra yang belum pernah
digunakan pada saat pelatihan, program dapat mendeteksi data uji validasi dengan presentase
kevalidan sebesar 100%. Program untuk deteksi citra MRI pada kelainan otak dengan FA pada
pelatihan jaringan RBF dapat dibuat dengan menggunakan bahasa pemrograman Java NetBeans
IDE 7.0.1 dan Microsoft Office 2003 untuk menyimpan data.
8. Daftar Pustaka
Basuki, A., Palandi, J. F., dan Fatchurrochman, 2005, Pengolahan Citra Digital Menggunakan
Visual Basic, Penerbit Graha Ilmu, Yogyakarta.
Bishop, C. M., 1995, Natural Network for Pattern Recognition, Oxford University Press,
Cambridge, UK.
Fausett, L., 1994, Fundamentals of Neural Networks: Architectures, Algorithms, and Applications,
Prentice-Hall
Inc., USA.
Hermawati, Fajar Astuti. 2013. Pengolahan Citra Digital Konsep & Teori. Andi Offset,
Yogyakarta.
Horng, Ming-Huwi, Yun-Xiang Lee, Ming-Chi Lee, and Ren-Jean Liou, 2012, Firefly Meta-
Heuristic Algorithm for Training the Radial Basis Function Network for Data
0.000000000000000
0.000002000000000
0.000004000000000
0.000006000000000
0.000008000000000
1 2 3
MSE
Iterasi ke-
Grafik Perubahan MSE
Jurnal Matematika 201357

Classification and Disease Diagnosis, Theory and New Applications of Swarm
Intelligence, InTech China, Shanghai, China.
Kusumadewi, S., dan Hartati, S., 2006, Neuro-Fuzzy Integrasi Sistem Fuzzy dan Jaringan Syaraf,
Penerbit
Graha Ilmu, Yogyakarta.
Wu, D., Warwick, K., Ma, Z., Gasson, M. N., Burgess, J. G., Pan, S. & Aziz, T., 2012, A
Prediction of Parkinson’s Disease Tremor Onset Using Radial Basis Function Neural
Networks, Expert Systems with Applications, Vol .37, pp.2923-2928.
Yang, X. S., 2010, Engineering Optimization: An Introduction with Metaheuris-tic Applications,
Wiley & Sons, Inc, New Jersey, USA.
Jurnal Matematika 201358

PENGGUNAAN METODE VALUE at RISK UNTUK MENENTUKAN
TINGKAT RESIKO INVESTASI PADA SAHAM PT GUDANG GARAM
Tbk MELALUI PENDEKATAN MODEL INTEGRATED GENERALIZED
AUTOREGRESSIVE CONDITIONAL HETEROSCEDASTICITY (IGARCH)
Nasrudin MB, Sediono, Eko Tjahjono
Departemen Matematika
Fakultas Sains dan Teknologi
Universitas Airlangga
Abstract
Heteroscedasticity in most economic and financial time series data can be
overcome by ARCH / GARCH models. However, the application of ARCH /
GARCH models has several weaknesses, one of them is the inability to see the
change or transition of behavior between low volatility and high volatility. Hence,
ARCH / GARCH models are modified by using IGARCH models. In the
IGARCH model, stationarity is satisfied if sum squares of residual coefficients
and conditional variance is 1. IGARCH model is better than ARCH / GARCH
models. The purpose of this paper is to model the stock price index that is
heteroscedastic into IGARCH model and to determine the Value at Risk (VaR) of
Jurnal Matematika 201359

stock price index for a period ahead. The data used in this paper is stock price
return data of PT Gudang Garam Tbk.
Modeling is settled by forming ARIMA model as a mean model, and
followed by modeling ARCH / GARCH, and then modeling conditional variance
IGARCH model where the sum of both parameters IGARCH number of
coefficients equal to one. From the stock price data of PT Gudang Garam Tbk, we
obtained IGARCH (1, 1) as the best model because it satisfied all assumptions,
those are, parameters which had been significant and squared residuals which had
been white noise. The general form of the IGARCH (1, 1) model is = 3.87 ×10 + 0.104046 + 0.895954ℎ . Value at Risk (VaR) is obtained from
the formed model for the next 30 days with certain allocated funds. Therefore, if
the allocated funds amounts IDR 1 billion with error rate of 95%, the level of risk
faced by investors who will invest in companies of PT Gudang Garam Tbk will be
IDR 210.420.382,00.Keywords : ARCH, GARCH, IGARCH, Value at Risk, Volatility, Return, White
Noise, Heteroscedasticity
1. Pendahuluan
Dalam dunia perekonomian, pergerakan harga-harga yang ekstrim
beberapa komoditas pada pasar keuangan sering terjadi, hal ini umumnya
disebabkan tidak stabilnya variabilitas berbagai komponen yang ada, sehingga
jelas akan mempengaruhi manajemen secara total, baik resiko manajemen secara
Jurnal Matematika 201360

internal maupun secara eksternal. Dalam analisis statistik, khususnya yang terkait
dengan model runtun waktu keuangan (financial time series) terdapat sebuah
metode untuk mengetahui atau mengukur tingkat resiko tersebut, metode tersebut
dikenal sebagai Value at Risk atau disingkat dengan VaR (Tsay,R.S.,2002).
Dalam prakteknya, model runtun waktu keuangan atau runtun waktu
ekonomi banyak dijumpai bahwa volatilitasnya sangat ekstrim. Dengan tingginya
volatilitas data ini, maka perlu dirancang sebuah model pendekatan untuk
mengukur persoalan volatilitas residual ( Enders, W.,1995). Salah satu model
varian yang dapat digunakan adalah model Integrated Generalized Autoregressive
Conditional Heteroscedasticity (IGARCH). Model IGARCH pertama kali
diperkenalkan oleh Engle dan Bollerslev pada tahun 1986 (Berkes,2005).
IGARCH merupakan bentuk khusus dari model ARCH/GARCH, dimana jumlah
seluruh koefisien error serta variance-nya sama dengan satu
Berdasarkan uraian diatas penulis tertarik untuk mengkaji lebih lanjut
tentang penggunaan metode Value at Risk (VaR) dan model IGARCH untuk
menghitung resiko investasi saham.. Oleh karena itu dalam tulisan ini akan dikaji
prosedur pembentukan model IGARCH yang selanjutnya digunakan untuk
menghitung nilai Value at Risk (VaR) dari investasi saham.
Jurnal Matematika 201361

2. Metode Penelitian
Metode penulisan yang digunakan dalam penulisan ini adalah sebagai berikut :
1. Mengkontruksi model IGARCH terbaik dari data return saham harian PT
Gudang Garam Tbk.
a. Pengumpulan data saham harian PT Gudang Garam Tbk
b. Menghitung nilai return saham harian PT Gudang Garam Tbk
c. Identifikasi model ARIMA terbaik yang meliputi :
d. Diagnostic checking
Jika model belum sesuai maka diulangi mulai identifikasi sampai didapatkan
model ARIMA terbaik.
e. Mendapatkan model ARIMA terbaik dari langkah 1.
f. Menentukan nilai residual dari model ARIMA terbaik.
g. Menghitung besarnya kuadrat residual yang terjadi dari model ARIMA
terbaik.
h. Plot time series dan ACF, PACF residual dan kuadrat residual dari model
ARIMA terbaik.
i. Pendugaan keadaan heteroscedastic dari tidak terpenuhinya asumsi white
noise maka dilakukan pembentukan pola kuadrat residual.
j. Menguji apakah ada proses heteroscedastic pada kuadrat residual dari
plot ACF dan PACF kuadrat residual.
Jurnal Matematika 201362

k. Pendugaan model IGARCH yang mungkin dari plot ACF dan PACF yang
muncul dengan software EViews.
2. Menghitung nilai Value at Risk (VaR) dari model IGARCH terbaik.
VaR menggunakan dua parameter yakni interval waktu pengamatan dan
tingkat kepercayaan. Dalam penelitian ini nilai yang digunakan adalah 5%.
Rumus yang digunakan adalah :
VaR(k) = Amount of position × 1.645 √ ,
dengan Amount of position adalah posisi investasi (alokasi dana),
merupakan simpangan baku dari distribusi normal berdasarkan model
IGARCH terbaik dan k = banyaknya hari.
3. Hasil dan Pembahasan
3.1 Mekanisme Pembentukan Model IGARCH (m,n) pada data return saham
PT Gudang Garam Tbk.
Berikut ini adalah tahapan yang dilakukan untuk mendapatkan model
IGARCH terbaik :
3.1.1 Analisis Model ARIMA terbaik
Data yang digunakan adalah data sekunder berupa data harga saham
PT Gudang Garam Tbk dari tanggal 10 Januari 2013 sampai 15 Oktober 2013.
Pada Gambar 1 berikut dapat dilihat plotting data secara umum data harga
saham (closed price) harian PT Gudang Garam Tbk.
Jurnal Matematika 201363

Gambar 1. Plot harga saham PT Gudang Garam Tbk
Gambar 2. Plot return harga saham PT Gudang Garam Tbk
Berdasarkan Gambar 2, terlihat bahwa data telah stasioner dalam mean
maupun varian, sehingga tidak perlu dilakukan transformasi untuk
menstasionerkan varians. Namun, untuk lebih akurat akan dilihat plott ACF
dan PACF dari data return saham
Jurnal Matematika 201364

Gambar 3. Plot ACF dan PACF return saham
Dari Gambar 3, terlihat bahwa return saham telah stasioner dan terlihat
bahwa ACF dan PACF keluar pada lag 1, sehingga dapat diduga model yang
sesuai dengan data ini adalah model ARIMA (1,0,0), ARIMA(0,0,1) dan
ARIMA (1,0,1).
Hasil pendugaan dan estimasi least square dari beberapa model
ARIMA dengan EViews 6 dirangkum ke dalam tabel berikut ini :
Tabel 1. Rangkuman pemodelan dengan model ARIMA
Model Coefficient p-Value MSE AIC SBC/BIC
Jumlah
Parameter
ARIMA (1,0,0) 0.223162 0.0016 0.000525 -4.71922 -4.702560 1
ARIMA (0,0,1) 0.245555 0.0005 0.000522 -4.73093 -4.714329 1
ARIMA
(1,0,1)
AR(1) -0.015388 0.9585
0.000524 -4.71569 -4.682365 2
Jurnal Matematika 201365

MA(1) 0.259497 0.3652
Dari rangkuman pemodelan dengan model ARIMA pada Tabel 1 diatas,
menunjukan bahwa model ARIMA (0,0,1) merupakan model terbaik untuk data
return saham ini, karena mempunya parameter signifikansi, serta mempunyai nilai
MSE, AIC dan SBC/BIC terkecil (paling negatif).
Gambar 4. Uji Q-Ljung-Box
Kemudian berdasarkan hasil pengujian p-value dari Ljung-Box test
pada Gambar 4 dari residual model ARIMA (0,0,1) telah memenuhi syarat
white noise. Dengan demikian dapat disimpulkan bahwa model ARIMA
(0,0,1) merupakan model terbaik unutk jenis data ini. Bentuk umum model
ARIMA (0,0,1) adalah sebagai berikut := 0.223162 +Setelah mendapatkan model ARIMA terbaik, maka dilakukan uji efek
ARCH dengan menggunakan ARCH-LM test. Jika pada model tersebut
Jurnal Matematika 201366

terdapat efek ARCH pada residualnya maka pemodelan dapat dilanjutkan
dengan menggunakan ARCH/GARCH.
Gambar 5. ARCH-LM test Residual Model ARIMA (0,0,1)
Dari Gambar 5, dapat dilihat bahwa nilai obs- ∗-squared lebih kecil
dari 0.05, yang artinya residual dalam kondisi heteroscedastic, sehingga
pemodelan dapat dilanjutkan dengan menggunakan ARCH/GARCH.
3.1.2 Pembentukan Model GARCH terbaik
Setelah didapatkan model ARIMA terbaik, maka dapat dimulai
pembentukan model GARCH. Adanya dugaan kasus heteroscedastic, bisa
dilihat dari plot ACF dan PACF residual kuadrat model ARIMA yang tidak
white noise.
Gambar 6. Plot ACF Residual Kuadrat
Jurnal Matematika 201367

Gambar 7. Plot PACF Residual Kuadrat
Dari plot ACF dan PACF pada Gambar 6 dan Gambar 7, terlihat
kuadrat residual model ARIMA terbaik tidak white noise, hal ini menunjukan
bahwa terdapat dugaan kasus heteroscedastic pada data return saham PT
Gudang Garam Tbk, sehingga perlu dilakukan penanganan khusus yaitu
dengan membentuk model varian errornya. Berdasarkan Gambar 6 terlihat
bahwa plot ACF keluar pada lag ke 6 dan 21, dan plot PACF pada Gambar 7
juga keluar pada lag ke 6 dan 21. Sehingga didapat model dugaan variannya
adalah GARCH (1,1), GARCH (1,2), GARCH (2,1), GARCH (2,2)
Hasil pendugaan dan estimasi dari beberapa model GARCH dengan
EViews 6 dirangkum ke dalam tabel berikut ini :
Jurnal Matematika 201368

Tabel 2. Hasil pendugaan dan estimasi parameter model GARCH
Model Coefficient P-Value AIC SBC/BIC
Jmlah
Parameter
GARCH
(1,1)
ARCH(1) 0.084107 0.0341 -4.725946 -4.676124 2
GARCH(1) 0.850237 0.0000
GARCH
(1,2)
ARCH(1) 0.036215 0.0243
-4.764291 -4.697861 3GARCH(1) 1.713327 0.0000
GARCH(2) -0.769594 0.0000
GARCH
(2,1)
ARCH(1) 0.002304 0.9430
-4.730846 -4.664416 3ARCH(2) 0.112876 0.0363
GARCH(1) 0.826063 0.0000
GARCH
(2,2)
ARCH(1) -0.054589 0.0685
-4.768233 -4.685196 4ARCH(2) 0.119874 0.0039
GARCH(1) 1.591842 0.0000
GARCH(2) -0.675988 0.0000
Dari Tabel 2, didapatkan hasil estimasi parameter dari semua model
yang diduga. Dari Tabel 2, model yang parameternya signifikan adalah model
GARCH (1,1) dan GARCH (1,2). Namun model GARCH (1,2) tidak feasible
karena koefisien dari GARCH (2) bernilai negative, sehingga model GARCH
(1,2) tidak dapat digunakan untuk memodelkan data return saham ini. Model
yang baik (sesuai) adalah model yang telah memenuhi semua asumsi, baik
parameter telah signifikan maupun residual kuadratnya yang sudah white
noise.
Jurnal Matematika 201369

Gambar 8. Plot ACF dan PACF Residual Kuadrat
Dari Gambar 8, terlihat bahwa sudah tidak ada lag yang keluar dari
plot residual kuadratnya, sehingga model GARCH (1,1) merupakan model
terbaik untuk jenis data ini karena telah memenuhi syarat semua langkah-
langkah untuk menjadi model terbaik. Secara matematis model GARCH (1,1)
dapat dituliskan dalam bentuk seperti berikut := 3.85 × 10 + 0.084107 + 0.850237ℎ3.1.3 Pembentukan Model IGARCH terbaik
Pada subbab sebelumnya, untuk model GARCH (1,1), dapat dilihat
bahwa jumlah koefisiennya mendekati nilai satu, yaitu 0.934344, yang berarti
bahwa model GARCH (1,1) dapat disebut sebagai model IGARCH (1,1),
sehingga langkah selanjutnya adalah memodelkan ulang model GARCH (1,1)
kedalam persamaan model IGARCH dan mengestimasi parameter-
parameternya berdasarkan model tersebut untuk mendapatkan nilai parameter
Jurnal Matematika 201370

yang lebih tepat. Estimasi parameter dilakukan dengan menggunakan software
EViews 6. Berikut adalah hasil estimasi model IGARCH (1,1) dengan EViews
6.
Gambar 9. Estimasi Model IGARCH (1,1)
Dari Gambar 9 diatas, terlihat bahwa jumlah kedua koefisiennya sama
dengan satu. Selain itu, nilai p-value yang lebih kecil dari = 0.05, yang
menandakan bahwa parameternya telah signifikan pada tingkat kepercayaan
95%. Untuk menguji ke-whitenoise-an terhadap residual dan residual kuadrat
dapat dilakukan dengan melihat plot ACF dan PACF nya.
Jurnal Matematika 201371

Gambar 10. Plot ACF dan PACF Residual
Gambar 11. Plot ACF dan PACF Residual Kuadrat
Jurnal Matematika 201372
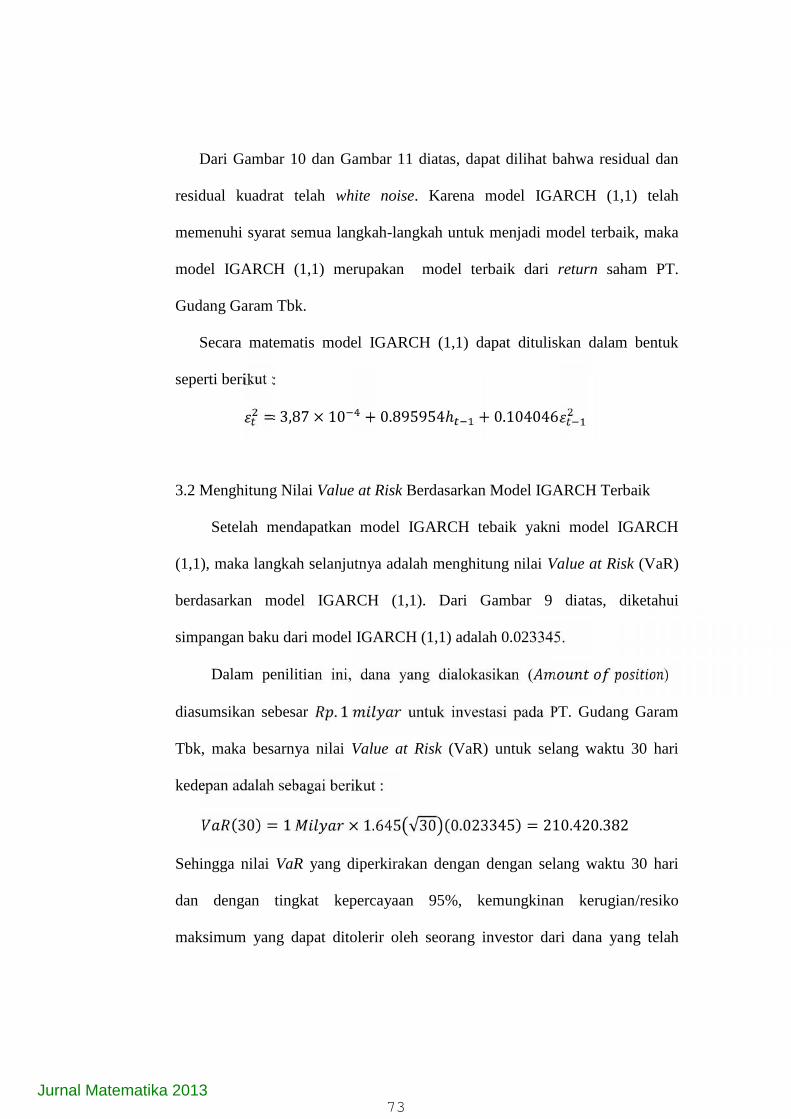
Dari Gambar 10 dan Gambar 11 diatas, dapat dilihat bahwa residual dan
residual kuadrat telah white noise. Karena model IGARCH (1,1) telah
memenuhi syarat semua langkah-langkah untuk menjadi model terbaik, maka
model IGARCH (1,1) merupakan model terbaik dari return saham PT.
Gudang Garam Tbk.
Secara matematis model IGARCH (1,1) dapat dituliskan dalam bentuk
seperti berikut := 3,87 × 10 + 0.895954ℎ + 0.1040463.2 Menghitung Nilai Value at Risk Berdasarkan Model IGARCH Terbaik
Setelah mendapatkan model IGARCH tebaik yakni model IGARCH
(1,1), maka langkah selanjutnya adalah menghitung nilai Value at Risk (VaR)
berdasarkan model IGARCH (1,1). Dari Gambar 9 diatas, diketahui
simpangan baku dari model IGARCH (1,1) adalah 0.023345.
Dalam penilitian ini, dana yang dialokasikan ( )
diasumsikan sebesar . 1 untuk investasi pada PT. Gudang Garam
Tbk, maka besarnya nilai Value at Risk (VaR) untuk selang waktu 30 hari
kedepan adalah sebagai berikut :(30) = 1 × 1.645 √30 (0.023345) = 210.420.382Sehingga nilai VaR yang diperkirakan dengan dengan selang waktu 30 hari
dan dengan tingkat kepercayaan 95%, kemungkinan kerugian/resiko
maksimum yang dapat ditolerir oleh seorang investor dari dana yang telah
Jurnal Matematika 201373

diinvestasikan adalah sebesar . 210.420.382,00. Dengan mengetahui
kisaran besaran VaR maka ini akan menjadi kriteria bagi para investor yang
akan menanamkan modalnya dalam pasar keuangan (financial)
4. Kesimpulan
Dari analisis pembahasan yang dilakukan, dapat diambil beberapa
kesimpulan sebagai berikut :1. Model terbaik dalam memodelkan data return saham harian PT. Gudang
Garam Tbk adalah sebagai berikut :1) Model ARIMA (0,0,1)= 0.223162 +2) Model GARCH (1,1)= 3.85 × 10 + 0.084107 + 0.850237ℎ3) Model IGARCH (1,1)= 3.87 × 10 + 0.895954ℎ + 0.1040462. Estimasi VaR dengan = 5%, jika diasumsikan besarnya investasi. 1 , nilai VaR yang diperkirakan dengan selang waktu 30 hari
dan dengan tingkat kepercayaan 95%, kemungkinan kerugian/resiko
maksimum yang dapat ditolerir oleh seorang investor dari dana yang telah
diinvestasikan adalah sebesar . 210.420.382,00.
Jurnal Matematika 201374

Daftar Pustaka
[1] Berkes, 2005, Near Integrated GARCH Sequances, Technische Universit at
Graz and Hungarian Academy of Science, University of Utah: Utah.
[2] Bollerslev, (1986), Generalized Autoregressive Conditional
Heteroscedasticity, Journal of Econometrics, 31, 307-327.
[3] Box, G.E.P. and Cox, D.R.,1964, An Analysis Transformation, Journal
Royal Stat.Soc,ser B.,26, hal. 211-252.
[4] Box, G.E.P., and Jenkins, G.M.,1976, Forecasting and Control, Holden
day: San Francisco.
[5] Christofferson, P.,2001, Testing and Comparing Value at Risk Measure,
Jurnal of Empirical Finance, Elsevier: USA.
[6] Cryer, D. J.,1986, Time Series Analysis, University of IOWA.
[7] Enders, 1995, Applied Econometric Time Series, John Willey & Sons. Inc:
Canada.
[8] Engle, R.F.,1982, Autoregressive Conditional Heteroscedasticity with
Estimates of the Variance of U.K. Inflation.Ekonometrica,50,987-1008.
[9] Harper, D. (2004), Introduction to Value at Risk (VaR), diakses 18 Maret
2014, dari www.Investopedia.com/articles/04/092904.asp
[10] Irawan, N. dan Astuti S.P.,2006, Mengelolah Data Statistik dengan Mudah
Menggunakan Minitab 14, Andi: Yogyakarta.
[11] Jogianto, 1998,Analisis dan Desain Sistem Informasi: Pendekatan
Terstruktur Teori dan Praktek Aplikasi Bisnis, Andi : Yogyakarta.
Jurnal Matematika 201375

[12] Lo, M. S.,2003, Generalized Autoregressive Conditional Heteroscedastic
Time Series Models, Simon Fraser University.
[13] Makidrakis, S., Wheelwright, S. and McGee,V.,1983, Forecasting:
Methods and Application, Second Edition, John Willey and Sons: New
York.
[14] Rosadi, D.,2011, Ekonometrika & Analisis Runtun Waktu Terapan dengan
EViews, Andi: Yogyakarta.
[15] Sediono, 2013, Penggunaan Metode VaR Untuk Menentukan Tingkat
Resiko Investasi Melalui Pendekatan Model Financial Time series,
Proceding Seminar Matematika, Universitas Airlangga: Surabaya.
[16] Suhartono, 2003, Buku Ajar: Analisis Time Series Model ARIMA (Metode
Box-Jenkins), Institut Teknologi Sepuluh Nopember Surabaya: Surabaya.
[17] Tiro, M. A.,2006, Analisis Deret Wakt: Teori dan Aplikasi, Andira
Publisher: Makassar.
[18] Tsay, S., R., 2002, Analysis of Financial Time Series, John Willey & Sons.
Inc, Chapman and Hall: New York.
[19] Wei, W. S., 1990, Time Series Analysis. Addison Wesley Publishing
Company: Canada.
Jurnal Matematika 201376

Hybrid Virus Evolutionary Genetic Algorithm (VEGA) dan
Simulated Annealing (SA) pada Penjadwalan Flowshop
Ramadhani Amulyo, Herry Suprajitno, Miswanto
Departemen Matematika, Fakultas Sains dan Teknologi
Universitas Airlangga
Abstract. The purpose of this paper is to solve the flowshop scheduling problem using a Hybrid of
Virus Evolutionary Genetic Algorithm and Simulated Annealing. Flowshop is defined as
scheduling problem to obtain the optimal solutions that involve n jobs and m machines in
production process. In flowshop scheduling each job is processed in each machine with the same
order. Virus Evolutionary genetic algorithm is searching solution algorithm that copy the
mechanics of selection and natural evolution with virus infection. Simulated Annealing is
analogous method to the annealing process. Hybrid of virus evolutionary genetic algorithm and
simulated annealing is a combination of both processes by insert simulated annealing algorithm to
the process of virus evolutionary genetic algorithms. The process of algorithm is started by
initialitation parameters, generate initial solutions, generate virus, calculate values of makespan
and fitness of each solution, determine candidate of parents with elitism selection, do subtour
exchange crossover, do resiprocal exchange to specified temperature, compare the makespan
value, decrease the temperature, combine the solutions of the result of crossover and mutation with
the initial host population, do selection of combined solutions, do reverse transcription, do
transduction and the process continues until the maximum iteration.
Keywords: Virus Evolutionary Genetic Algorithm, Hybrid, Simulated Annealing,
Flowshop Scheduling.
1. PENDAHULUAN
Adanya penerapan pasar bebas di Indonesia menimbulkan tantangan bagi
perusahaan manufaktur untuk berkompetisi dengan beroperasi menggunakan biaya
produksi seminimal mungkin serta waktu produksi yang pendek. Pada sistem produksi
perusahaan manufaktur melibatkan banyak proses dan mesin yang waktu proses
produksinya bervariasi. Hal tersebut menjadi hambatan tersendiri, karena jika proses
produksi tidak dijadwal dengan baik maka akan terjadi penumpukan pekerjaan atau
terjadi antrian panjang barang yang harus diproses sehingga berakibat pada proses
produksi secara keseluruhan.
Penjadwalan flowshop merupakan proses penentuan urutan pekerjaan yang
memiliki lintasan produk yang sama yang terdapat pada perusahaan manufaktur.
Penjadwalan produksi melibatkan n job dan m mesin dalam proses produksinya. Setiap
job memiliki waktu proses yang berbeda dalam setiap mesin. Penjadwalan produksi
bertujuan untuk mengurutkan pekerjaan maupun sumber daya agar mendapatkan suatu
kondisi yang optimal. Salah satu tujuan yang penting dalam penjadwalan produksi adalah
minimasi makespan, yaitu waktu yang dibutuhkan untuk menyelesaikan semua job dalam
sistem produksi. Secara umum, mesin dapat melaksanakan pekerjaan dalam urutan
apapun, namun terkadang urutan yang sama pada mesin tetap diperlukan. Pada flowshop,
operasi dari suatu job hanya dapat bergerak satu arah, yaitu proses operasi pertama di
mesin pertama, operasi kedua di mesin kedua, operasi ketiga di mesin ketiga, sampai
proses operasi terakhir di mesin terakhir sehingga tiap pekerjaan memiliki urutan operasi
dan mesin yang sama.
Jurnal Matematika 201377

Pengembangan metode untuk menyelesaikan masalah penjadwalan flowshop harus
memperhitungkan kompleksitas masalahnya. Sampai saat ini telah banyak peneliti yang
mencoba berbagai macam algoritma untuk mendapatkan solusi yang optimal.
Diantaranya adalah dengan menggunakan Ant Colony Optimization (Rajendran dan
Ziegler, 2004), Algoritma Genetika (Azmi dkk, 2011), Simulated Annealing (Hurkala,
2012).
Virus Evolutionary Genetic Algorithm (VEGA) merupakan penggabungan antara
algoritma genetik dengan infeksi virus (Fukuda dkk, 1999). Algoritma genetika
merupakan metode optimasi yang ditransformasikan dari teori evolusi dan seleksi alam di
dalam suatu populasi individu yang mempresentasikan solusi potensial masalah
(Sandicki, 2000). Virus memiliki kemampuan untuk menembus materi genetik individu
yang menyebabkan perubahan genetik, sehingga dapat menghasilkan suatu variasi
genetik pada populasi. VEGA digunakan untuk pencarian secara global, yaitu
mendapatkan solusi baru yang kompleks dengan memilih individu yang lebih baik
(Fountas, 2013). Menurut Kirkpatrick (1983), Simulated annealing adalah salah satu
algoritma untuk optimasi yang diaplikasikan pertama kali tahun 1983. Algoritma ini
dapat digunakan untuk mencari pendekatan terhadap solusi optimum lokal dari suatu
permasalahan. Oleh karena itu, VEGA lebih baik jika dikombinasikan dengan simulated
annealing. VEGA yang dapat digunakan untuk pencarian secara global diharapkan akan
mendapat solusi baru yang lebih baik, sedangkan simulated annealing yang digunakan
untuk pencarian secara lokal diharapkan bisa mendapatkan solusi baru secara cepat dalam
menyelesaikan masalah penjadwalan flowshop.
2. PENJADWALAN FLOWSHOP
Penjadwalan flowshop adalah perencanaan produksi dengan n job yang harus
diproses dalam urutan yang sama pada m mesin. Baker (2009) berpendapat bahwa
flowshop dapat dibedakan menjadi 2 yaitu :
1. Pure flowshop, yaitu semua order akan mengalir pada jalur produksi yang sama
2. General flowshop, yaitu tidak semua order mengalir pada jalur produksi yang sama
karena suatu shop dapat menangani tugas yang bermacam-macam dan tidak harus
dikerjakan pada semua mesin.
Salah satu tujuan dari penjadwalan flowshop adalah
𝑚𝑒𝑚𝑖𝑛𝑖𝑚𝑎𝑙𝑘𝑎𝑛 𝐹𝑚𝑎𝑥 Fmax : makespan seluruh job yang ada dalam urutan
Dengan kata lain, tujuan penjadwalan flowshop adalah meminimalkan waktu yang
dibutuhkan untuk memproses seluruh pekerjaan.
Untuk menunjukkan bagaimana proses penjadwalan terjadi, jadwal produksi biasa
direpresentasikan dalam Diagram Gantt (Gantt Chart). Diagram Gantt dapat membantu
untuk menampilkan jadwal dan elemen secara rinci karena sumber daya (mesin) dan
tugas terlihat dengan jelas. Dengan diagram Gantt, kita dapat menemukan informasi
tentang jadwal yang diberikan dengan menganalisis bentuk geometrinya (Baker, 2009).
Gambar 2.2 Diagram Gantt flowshop
Jurnal Matematika 201378

3. ALGORITMA GENETIKA Algoritma genetika merupakan suatu teknik stokastik yang berdasarkan pada
proses seleksi alam dan ilmu genetika (Gen dan Cheng, 1997). Algoritma ini akan
mengkombinasikan daya tahan (survival) dari suatu struktur data yang paling baik
(fittest). Menurut Obitko (1998) secara garis besar, algoritma genetika dapat dijabarkan
sebagai berikut :
1. Mulai : membangkitkan populasi secara random sebanyak n individu.
2. Fitness : menilai keandalan setiap individu dalam populasi.
Individu yang memiliki nilai fitness lebih tinggi dianggap sebagai individu yang
lebih baik. Sehingga untuk permasalahan minimalisasi makespan pada flowshop ini,
maka fungsi fitness-nya sebagai berikut :
fungsi fitness = 1
𝑀
dengan M adalah nilai makespan.
3. Populasi baru : membuat populasi baru lewat pengulangan pengoperasian operator
genetika berikut sampai populasi baru lengkap.
a. Seleksi : memilih induk dari populasi sesuai dengan nilai keandalannya
(keandalan yang lebih baik, lebih berpeluang untuk terpilih). Metode seleksi
yang digunakan adalah elitism. Cara kerja metode ini adalah sebagai berikut :
1. Menyimpan satu individu terbaik sebagai individu untuk populasi host baru
berdasarkan nilai fitness
2. Hitung total fitness (f) :
𝑇𝑜𝑡𝑎𝑙𝐹𝑖𝑡𝑛𝑒𝑠𝑠 = 𝑓𝑘 ; k = 1, 2, …, (pop_size-1)
3. Hitung probabilitas masing-masing individu dari fitness masing-masing
dibagi total fitness semua individu (fitness relative) :
𝑝𝑘 =𝑓𝑘
𝑇𝑜𝑡𝑎𝑙𝐹𝑖𝑡𝑛𝑒𝑠𝑠
4. Hitung fitness kumulatif :
𝑞1 = 𝑝1
𝑞𝑘 = 𝑞𝑘−1 + 𝑝𝑘 ; k = 2,3, …, (popsize-1)
5. Pilih calon induk yang akan dilakukan crossover dengan cara :
i. Bangkitkan bilangan random r [0,1]
ii. Jika 𝑟 ≤ 𝑞1 , maka kromosom pertama terpilih. Jika 𝑞𝑘 ≤ 𝑟 ≤ 𝑞𝑘+1
untuk k = 2, 3, …, (popsize-1), maka pilih kromosom ke (𝑘 + 1)
sebagai calon induk crossover. 6. Pilih induk yang akan dilakukan crossover dengan cara :
i. Bangkitkan bilangan random r [0,1]
ii. Jika 𝑟 ≤ 𝑃𝑐 , maka kromosom terpilih sebagai induk crossover.
7. Pilih calon induk yang akan dilakukan mutasi dengan cara :
i. Bangkitkan bilangan random r [0,1]
ii. Jika 𝑟 ≤ 𝑞1 , maka kromosom pertama terpilih. Jika 𝑞𝑘 ≤ 𝑟 ≤ 𝑞𝑘+1
untuk k = 2, 3, …, (popsize-1), maka pilih kromosom ke (𝑘 + 1)
sebagai calon induk mutasi. 8. Pilih induk yang akan dilakukan crossover dengan cara :
i. Bangkitkan bilangan random r [0,1]
ii. Jika 𝑟 ≤ 𝑃𝑚 , maka kromosom terpilih sebagai induk mutasi.
b. Crossover : induk crossover membentuk anak (individu baru). Jika tidak ada
crossover yang dilaksanakan, anak merupakan salinan induknya. Crossover
yang digunakan adalah Subtour Exchange Crossover (SEC).
c. Mutasi : mutasi lokus pada masing-masing induk (lokus = posisi dalam
individu). Mutasi yang digunakan adalah Resiprocal Exchange Mutation.
Jurnal Matematika 201379

d. Accepting : tempat anak pada populasi baru.
4. Mengganti : populasi yang baru dibentuk untuk menjalankan algoritma lebih
lanjut.
5. Menguji : jika sudah mencapai n iterasi atau optimal, berhenti dan diperoleh
solusi terbaik dari populasi ini. Jika tidak maka kembali ke langkah 2 sampai
diperoleh solusi terbaik dari populasi ini.
4. VIRUS EVOLUTIONARY GENETIC ALGORITHM (VEGA) VEGA merupakan penggabungan antara algoritma genetika dengan infeksi virus
(Fukuda dkk, 1999). VEGA disusun dari dua populasi, yaitu: populasi host dan populasi
virus. Populasi host merupakan rangkaian kandidat solusi, sedangkan populasi virus
merupakan substring dari individu host yang akan menginfeksi populasi host. Proses
VEGA secara umum menurut Fukuda dkk (1999), yaitu:
1. Mulai : membangkitkan populasi host secara random sebanyak n individu dan
populasi virus sebanyak m individu.
2. Fitness : menilai keandalan setiap individu host dalam populasi.
3. Populasi baru : melakukan peoses seleksi (elitism), crossover, mutasi, san
accepting.
6. Mengganti : populasi host yang baru dibentuk untuk menjalankan algoritma
lebih lanjut.
4. Menguji : sudah memenuhi interinfection time, lanjut ke langkah 5. Jika tidak
maka kembali ke langkah 2.
5. Reserve transcription : proses infeksi virus, yaitu menyisipkan individu virus ke
dalam substring individu host yang dipilih secara acak (hostj)
6. Evaluasi : kekuatan infeksi virus (fitvirusi) dan harapan hidup virus (Lifei,t).
𝑓𝑖𝑡𝑣𝑖𝑟𝑢𝑠𝑖,𝑗 = 𝑓𝑖𝑡ℎ𝑜𝑠𝑡𝑗′ − 𝑓𝑖𝑡ℎ𝑜𝑠𝑡𝑗
𝑓𝑖𝑡𝑣𝑖𝑟𝑢𝑠𝑖 = 𝑓𝑖𝑡𝑣𝑖𝑟𝑢𝑠𝑖,𝑗𝑗∈𝑆
𝐿𝑖𝑓𝑒𝑖,𝑡 = 𝑟 × 𝐿𝑖𝑓𝑒𝑖,𝑡−1 + 𝑓𝑖𝑡𝑣𝑖𝑟𝑢𝑠𝑖
Dengan r adalah tingkat penurunan daya hidup virus. r bernilai [0,1].
7. Transduction : mengambil DNA/beberapa gen (substring) dari individu host
untuk dijadikan individu virus baru.
8. Mengganti : populasi host dan populasi virus yang baru dibentuk untuk
menjalankan algoritma lebih lanjut.
9. Menguji : jika sudah mencapai n iterasi atau optimal, berhenti dan diperoleh
solusi terbaik dari populasi ini. Jika tidak maka kembali ke langkah 2 sampai
diperoleh solusi terbaik dari populasi ini.
5. SIMULATED ANNEALING (SA)
Simulated Annealing (SA) diperkenalkan oleh Metropolis pada tahun 1953 dan
diaplikasikan dalam masalah optimasi pertama kali oleh Kirkpatrick et al. pada tahun
1983. SA dikembangkan berdasarkan proses metalurgi benda logam yang sangat panas
kemudian mengalami pendinginan secara perlahan-lahan sampai mengkristal. Algoritma
ini dimulai pada suhu yang sangat tinggi dan dibiarkan menurun sampai batas yang
diperbolehkan. Hal ini bertujuan untuk mendapatkan solusi yang lebih baik hanya saat
logam mencapai struktur kristal. Algoritma ini juga dapat digunakan untuk menentukan
nilai minimum dari fungsi tujuan (Sandikci, 2000). Secara garis besar simulated annealing dapat dijabarkan sebagai berikut:
1. Inisialisasi temperatur awal 𝑇𝑛𝑜𝑤 .
Jurnal Matematika 201380

2. Inisialisasi populasi awal 𝑣𝑖 , 𝑖 = 1, 2,… , 𝑝𝑜𝑝_𝑠𝑖𝑧𝑒.
3. Evaluasi populasi awal sebagai solusi sementara 𝑓(𝑣𝑖).
4. Modifikasi populasi awal 𝑣𝑚 dan evaluasi kembali sebagai solusi baru 𝑓(𝑣𝑚 ).
5. Jika 𝑓(𝑣𝑚 ) ≤ 𝑓(𝑣𝑖) maka solusi sementara sama dengan solusi baru. Jika tidak,
maka hitung probabilitas 𝑃 = exp −∆𝑓
𝑇 . Dengan ∆𝑓 merupakan selisih 𝑓(𝑣𝑖) dan
𝑓(𝑣𝑚 ), sedangkan T adalah suhu saat ini. Bangkitkan bilangan acak 𝑟 pada interval
[0,1]. Jika 𝑃 > 𝑟 maka solusi baru tetap diterima sebagai solusi sementara.
6. Jika sudah iterasi maksimum, maka algoritma berhenti. Jika tidak, hitung
perubahan temperatur 𝑇𝑖 = 𝛼𝑇𝑛𝑜𝑤 dengan 0 < 𝛼 < 1 dan kembali ke langkah 4.
6. HYBRID VEGA DAN SA Setelah ditampilkan prosedur penggunaan untuk masing-masing algoritma, maka
akan dilakukan penggabungan (hybrid) kedua algoritma tersebut. Prosedur hybrid VEGA
dan SA ditunjukkan pada Gambar 5.1.
Jurnal Matematika 201381

Gambar 5.1 Flowchart hybrid VEGA dan SA
7. HASIL DAN PEMBAHASAN
Hybrid VEGA dan SA telah dilakukan pada masalah penadwalan flowshop dengan
menggunakan data 4 job 3 mesin, 13 job 4 mesin, 20 job 10 mesin. Data 4 job 3 mesin
Jurnal Matematika 201382

diperoleh dari (Sayadi dkk, 2010), data 13 job 4 mesin dan 20 job 10 mesin diperoleh
dari https://files.nyu.edu/jeb21/public/jeb/orlib/files/flowshop1.txt. Terdapat 3
parameter yang berbeda yaitu pop Pc, Pm, dan Pv. Pencarian solusi menggunakan
parameter Host pop size = 40, Virus pop size = 10, Max generation = 50, Interinfection
time = 2, Probabilitas crossover (Pc) = 0.3, 0.5, 0.7, Probabilitas mutation (Pm) = 0.01,
0.1, 0.2, Suhu awal (T0) = 100, Suhu akhir (Ta) = 0, Penurunan suhu (ΔT) = 25, Panjang
virus = 4, Probabilitas infeksi virus (Pv) = 0.3, 0.5, 0.7, dan r = 0.9 memperoleh hasil
sebagai berikut :
i. untuk data 4 job 3 mesin dapat dilihat pada Tabel 7.1.
Tabel 7.1 Nilai Makespan Data 4 job 3 mesin
Pvirus = 0.3 Pvirus = 0.5 Pvirus = 0.7
Pc = 0.3
Pm = 0.01 24 24 24
Pm = 0.1 24 24 24
Pm = 0.2 24 24 24
Pc = 0.5
Pm = 0.01 24 24 24
Pm = 0.1 24 24 24
Pm = 0.2 24 24 24
Pc = 0.7
Pm = 0.01 24 24 24
Pm = 0.1 24 24 24
Pm = 0.2 24 24 24
Pada Tabel 7.1 dapat dilihat bahwa dari parameter yang berbeda-beda
menghasilkan satu nilai makespan, yaitu 24 satuan waktu. Sehingga dapat disimpulkan
bahwa makespan yang minimal adalah 24 satuan waktu dengan penjadwalan 4-4-3-4-1-
1-1-3-2-2-3-2.
ii. untuk data 13 job 4 mesin dapat dilihat pada Tabel 7.2
Tabel 7.2 Nilai Makespan 13 Job 4 Mesin
Pvirus = 03 Pvirus = 0.5 Pvirus = 0.7
Pc = 0.3
Pm = 0.01 8370 8370 8278
Pm = 0.1 8358 8246 8215
Pm = 0.2 8310 8214 8207
Pc = 0.5
Pm = 0.01 8304 8202 8201
Pm = 0.1 8244 8123 8123
Pm = 0.2 8239 7985 7940
Pc = 0.7
Pm = 0.01 8123 7940 7939
Pm = 0.1 8123 7846 7817
Pm = 0.2 8091 7794 7639
Pada Tabel 7.2 dapat dilihat bahwa semakin besar nilai Pc, Pm, dan Pv yang
diberikan, maka nilai makespan yang diperoleh semakin minimal. Diperoleh penjadwalan
3-3-11-3-7-8-3-7-4-8-7-8-11-7-4-1-11-8-1-2-4-11-2-4-1-2-1-13-5-2-13-13-5-9-6-
9-12-13-5-6-9-9-12-6-6-5-10-10-12-12-10-10 denga makespan yang minimal adalah
7639 satuan waktu dari parameter Pc = 0.7, Pm = 0.2, dan Pv = 0.7.
Jurnal Matematika 201383

iii. untuk data 20 job 10 mesin dapat dilihat pada Tabel 7.3.
Tabel 7.2 Nilai Makespan 20 Job 10 Mesin
Pv = 0.3 Pv = 0.5 Pv = 0.7
Pc = 0.3
Pm = 0.01 212 204 200
Pm = 0.1 209 203 198
Pm = 0.2 208 201 197
Pc = 0.5
Pm = 0.01 207 200 197
Pm = 0.1 206 199 195
Pm = 0.2 205 195 194
Pc = 0.7
Pm = 0.01 204 192 192
Pm = 0.1 201 192 191
Pm = 0.2 197 186 182
Pada Tabel 7.2 dapat dilihat bahwa semakin besar nilai Pc, Pm, dan Pv yang
diberikan, maka nilai makespan yang diperoleh semakin minimal. Sehingga diperole
penjadwalan 2-1-12-1-2-14-20-11-14-14-3-11-16-12-11-13-20-20-11-14-9-3-
11-16-12-6-14-6-9-20-15-6-3-15-14-20-4-10-6-6-20-14-1-5-4-3-5-6-20-14-
20-17-2-2-6-14-5-1-20-3-11-19-16-1-11-3-11-12-11-11-2-20-17-14-3-16-16-
2-6-15-15-4-15-1-12-3-2-1-3-2-6-15-12-6-2-4-1-13-4-10-7-15-12-4-4-10-16-
15-4-10-9-13-1-16-3-7-7-13-17-8-2-15-15-9-10-9-9-12-9-8-8-4-10-18-16-19-
5-9-8-4-1-12-10-9-9-17-7-16-13-12-18-8-16-13-8-10-8-18-17-17-10-5-17-19-
10-7-8-17-7-13-13-19-13-8-5-18-19-7-7-13-17-8-18-19-5-18-17-5-7-19-5-7-
5-18-19-18-19-19-18-18 dengan makespan yang minimal adalah 182 satuan waktu
diperoleh dari parameter Pc= 0.7, Pm = 0.2, dan Pv = 0.7.
8. KESIMPULAN
Berdasarkan perhitungan dengan nilai parameter yang berbeda menunjukkan
bahwa semakin besar nilai Pc, Pm, dan Pv yang diberikan, maka nilai makespan yang
diperoleh semakin minimal. Namun hal ini tidak berlaku pada data yang berukuran kecil
karena terbatasnya urutan penjadwalan yang diperoleh.
DAFTAR PUSTAKA
[1] Anonim, https://files.nyu.edu/jeb21/public/jeb/orlib/files/flowshop1.txt. Diakses tanggal 19 Juni 2014.
[2] Baker, K.R. dan Trietsch, D., 2009, Principles of Sequencing and Scheduling, John
Wiley & Sons, New York.
[3] Azmi, N., Jamaran, I., Arkeman, Y., & Mangunwidjaya, D., 2011, Penjadwalan
Pesanan Menggunakan Algoritma Genetika Untuk Tipe Produksi Hybrid And
Flexible Flowshop Pada Industri Kemasan Karton. Jurnal Teknik Industri
[4] Gen, M. dan Cheng, R., 1997, Genetic Algorithms and Engineering Design, John
Wiley & Sons, Inc, New York.
[5] Fountas N. A. dan Nikolaos M. V., 2013, A Modified Virus Evolutionary
Genetic Algorithm For Rough Machining Optimization Of Sculptured
Jurnal Matematika 201384

Surfaces, School Of Pedagogical & Technological Education (Aspete) ,
Department Of Mechanical Engineering, Educators – Lab. Of
Manufacturing Processes & Machine Tools (Lmpromat), N. Heraklion
Athens, Greece
[6] Fukuda T., Kubota N., dan Shimojima K., 1999, Evolutionary Computation:
Theory and Applications, Chapter 7: Virus Evolutionary Genetic Algorithm and Its
Applications To Traveling Salesman Problem, halaman 235-255, Editor: Xin Yao,
World Scientific, Singapura
[7] Hurkala J dan Hurkala A. 2012. Effective Design of The Simulated Annealing
Algorithm for The Flowshop Problem with Minimum Makespan Criterion, Journal
of Telecommunications & Information Technology, Vol. 2012 Issue 2, Halaman 92
[8] Kirkpatrick, S., Gelatt, C. D. dan Vecchi, M. P., 1983, Optimization by Simulated
Annealing, Science, 220, 671-680.
[9] Kusumadewi, S., H., Purnomo. 2005. Penyelesaian Masalah Optimasi dengan
Teknik-teknik Heuristik. Graha Ilmu, Yogyakarta
[10] Obitko, M., 1998, Introduction to Genetic Algorithms, Czech Technical
University, Prague
[11] Rajendran C. dan Ziegler H, 2004, Ant-colony algorithms for permutation
flowshop scheduling to minimize makespan/total flowtime of jobs, European
Journal of Operational Research
[12] Sandikci, B, 2000, Genetic Algorithms, Department of Industrial Engineering of
Bilkent University, Ankara. [13] Sayadi M K, Ramezanian R, dan Nasab N G, 2010, A discrete firefly meta-
heuristic with local search for makespan minimization in permutation flow shop
scheduling problems, dept of industrial engineering, iran university of science and
technologi, Tehran, iran
Jurnal Matematika 201385

KETERBATASAN OPERATOR INTEGRAL FRAKSIONAL PADA RUANG MORREY
KLASIK ATAS RUANG METRIK
Susan Hartanto, Moh. Imam Utoyo, Eridani
Departemen Matematika
Fakultas Sains dan Teknologi
Universitas Airlangga
Abstract. We establish the sufficient condition for the boundedness of the fractional
integral operator and the generalized fractional integral operator in the Classic Morrey Space
on Metric Space.
Keywords : Fractional integral operator, Classic Morrey space, Metric space.
1. Pendahuluan
Operator adalah pemetaan dari ruang norma yang satu ke ruang norma yang lain.
Operator dikatakan terbatas dari ruang norma ke ruang norma jika terdapat konstanta
sehingga untuk setiap ,
‖ ‖ ‖ ‖
dengan ‖ ‖ menotasikan norma di . Jika dan operator terbatas, maka
dikatakan bahwa terbatas di .
Operator integral fraksional dinotasikan dengan dan didefinisikan sebagai :
( ) ∫ ( )
| |
nilai tidak selalu dapat diselesaikan secara analitik, sehingga penyelesaiannya dilakukan
secara numerik. Untuk mendapatkan selesaian numerik diperlukan syarat bahwa selesaiannya
kontinu. Berdasarkan fakta bahwa operator adalah kontinu jika dan hanya jika terbatas
(Brown dan Page, 1970, Teorema 3.5.4. hal. 104) sehingga, nilai operator dapat dicari
dengan menggunakan penyelesaian numerik jika terbatas.
Keterbatasan pada Ruang Lebesgue telah dikaji oleh Hardy dan Littlewood pada
tahun 1932 dan Sobolev pada tahun 1938. Ketiganya membuktikan keterbatasan yang
dikenal sebagai ketaksamaan Hardy-Littlewood-Sobolev (disingkat H-L-S) (Gunawan dan
Eridani, 2009). Pembuktian ketaksamaan H-L-S dilakukan dengan memanfaatkan
keterbatasan operator maksimal Hardy-Littlewood (disingkat M-H-L) pada Ruang Lebesgue.
Selanjutnya Spanne (dalam (Peetre, 1969)) dan Adams (1975) membuktikan
keterbatasan pada Ruang Morrey Klasik yang merupakan perumuman dari Ruang
Lebesgue. Selanjutnya, Chiarenza dan Frasca (1987) membuktikan kembali hasil yang telah
diperoleh Adams. Keterbatasan pada ruang yang lebih umum dibuktikan oleh Nakai (1994)
dan; Gunawan dan Eridani (2009), yaitu Ruang Morrey diperumum yang merupakan
perumuman dari Ruang Morrey Klasik dan oleh karenanya merupakan perumuman dari
Ruang Lebesgue.
Penelitian Hardy-Littlewood, Sobolev, Spanne, Adams, Chiarenza dan Frasca, Nakai
serta Gunawan dan Eridani yang berkaitan dengan keterbatasan operator dilakukan pada
Ruang Euclid. Oleh karena Ruang Euclid merupakan bentuk khusus dari Ruang metrik, hal ini
menimbulkan gagasan perlunya dikaji keterbatasan operator integral fraksional pada Ruang
Morrey Klasik di Ruang Metrik.
Jurnal Matematika 201386

2. Operator Integral Fraksional dan Perumumannya Operator integral fraksional di ruang metrik didefinisikan sebagai
( ) ∫ ( )
( )
( )
Selanjutnya didefinisikan perumuman operator integral fraksional sebagai berikut
( ) ∫ ( ( ))
( )
( ) ( )
yang merupakan perumuman dari operator integral fraksional karena apabila diambil
( ) ( ) dengan ( ) , maka dengan memenuhi doubling
condition (DC) yaitu untuk setiap dan jika
maka
( )
( ) . Jika
memenuhi
( ) ( ) ( ) sehingga
( )
( )
( )
atau
( )
( )
( )
.
Oleh karena itu ∫
( )
∫
( )
∫
( )
sehingga
( ) ∫
( )
( ). Jika ( ) memenuhi
( ) ∫
( )
( ) maka ditulis ( ) ∫
( )
.
3. Ruang Morrey Klasik Pada Ruang Metrik
Ruang Lebesgue didefinisikan sebagai ruang kelas-kelas fungsi ekivalen dengan sifat
‖ ( )‖ (∫ | ( )| ( )
)
.dengan .
Selanjutnya, dua fungsi dan di Ruang Lebesgue dikatakan berada dalam kelas yang sama
jika hampir dimana-mana, yaitu hanya dihimpunan berukuran nol.
Ruang Lebesgue lokal dinotasikan dengan
( ) didefinisikan sebagai ruang
kelas-kelas ekivalen sehingga untuk setiap himpunan bagian kompak di bersifat
∫| ( )|
Ruang Morrey Klasik didefinisikan sebagai himpunan semua
sehingga
‖ ( )‖ ( ) (
( ) ∫ | ( )| ( )
)
.
Ruang merupakan perumuman dari ruang , sebab jika dipilih , maka
.
‖ ( )‖ (∫| ( )| ( )
)
4. Keterbatasan Operator Integral Fraksional di Ruang Metrik
Untuk membuktikan keterbatasan operator integral fraksional diperlukan operator
maksimal yang didefinisikan sebagai
( )
( )∫ | ( )| ( )
Jurnal Matematika 201387

dengan merupakan sebarang bola buka yang memuat . Keterbatasan operator
maksimal di ( ) dengan adalah Ruang Metrik akan diberikan pada teorema berikut
Teorema 4.1. Jika dan maka terdapat konstanta sehingga
‖ ( )‖ ‖ ( )‖
(Duoandikoetxea, 2001, hal. 43)
Dalam pembuktian keterbatasan operator integral fraksional juga dibutuhkan
ketaksamaan Hedberg yang diberikan dalam teorema berikut
Teorema 4.2. Ketaksamaan Hedberg. Jika
maka terdapat konstanta
sehingga
( ) ‖ ‖
( ) .
(Duoandikoetxea, 2001, hal. 89)
Dalam pembuktiannya juga digunakan ketaksamaan Hӧlder dan ketaksamaan Minskowski.
5. Hasil dan Pembahasan
Dalam pembuktian keterbatasan operator integral fraksional pada Ruang Morey Klasik
dibutuhkan teorema berikut yang selanjutnya digunakan untuk membuktikan keterbatasan
operator integral pada Ruang Lebesgue dan akan diperumum menjadi Ruang Morrey
Klasik.
Teorema 5.1. (Ketaksamaan Hedberg). Jika
dan maka | ( )|
‖ ( )‖ ( ) .
Bukti : Misalkan ( ) ∫ ( )
( ) ( )
( ) ( ) dengan ( )
∫ ( )
( ) ( ) ( )
dan ( ) ∫ ( )
( ) ( ) ( )
.
Berdasarkan fakta bahwa ( ) dan diperoleh
| ( )| ∑ ∫| ( )|
( ) ( ) ( )
∑
( ) ∫ | ( )| ( )
( )
∑ ( ) ( )
( )∫ | ( )| ( ) ( )
( )∑
( ),
Oleh karena itu,
| ( )| ( ). (5.1)
Selanjutnya berdasarkan fakta bahwa ( ),
, dan dengan menggunakan
ketaksamaan Hӧlder diperoleh
| ( )| ∑ ∫| ( )|
( ) ( ) ( )
∑ ( ) (∫ | ( )| ( ) ( )
)
(∫
( ) ( )
)
∑ ( ) (∫ | ( )| ( ) ( )
)
( )
‖ ( )‖∑ ( )
‖ ( )‖
.
Oleh karena itu,
| ( )|
‖ ( )‖. (5.2)
Dengan dipilih ‖ ( )‖
( ) diperoleh
Jurnal Matematika 201388

| ( )| ( )
‖ ( )‖
‖ ( )‖ ( ) ‖ ( )‖ ( ) ,
sehingga
| ( )| ‖ ( )‖ ( ) . (5.3)
Teorema 5.2. (Teorema H-L-S). Misalkan
dan . Jika
, maka
terbatas dari ke .
Bukti : Berdasarkan Teorema 4.1 dan fakta bahwa
, dan dengan memangkatkan
kedua ruas persamaan (5.3) diperoleh
‖ ( )‖ (∫ | ( )|
( ))
(∫ ‖ ( )‖ ( ) ( )
)
‖ ( )‖ (∫ ( ) ( )
)
‖ ( )‖
‖ ( )‖.
Oleh karena itu,
‖ ( )‖ ‖ ( )‖.
Teorema 5.3. Misalkan , , dan
. Jika
maka
terbatas dari ke .
Bukti : Misalkan ( ) ( ) ( ) dengan dan berdasarkan
Ketaksamaan Minkowski maka
(
( ) ∫ | ( )|
( ))
(
( ) ∫ | ( )|
( ))
(
( ) ∫ | ( )|
( ))
.
Diambil sebarang bola ( ). Misalkan ( ), dan . Karena
(∫ | ( )|
( ))
(∫ | ( )|
( ))
( )
‖ ( )‖
‖ ( )‖ , maka .
Berdasarkan fakta bahwa dan
diperoleh
(
( ) ∫ | ( )|
( ))
( )
(∫ | ( )|
( ))
( )
(∫ | ( )|
( ))
‖ ( )‖.
Oleh karena itu,
(
( ) ∫ | ( )|
( ))
‖ ( )‖. (5.4)
Selanjutnya diambil sebarang ( ) dan . Karena
(∫ | ( )|
( ))
( )
(
( ) ∫ | ( )| ( ))
( )
‖ ( )‖ , maka .
Berdasarkan fakta bahwa dan
diperoleh
(
( ) ∫ | ( )|
( ))
( )
(∫ | ( )|
( ))
Jurnal Matematika 201389

( )
(∫ | ( )|
( ))
‖ ( )‖ .
Oleh karena itu,
(
( ) ∫ | ( )|
( ))
‖ ( )‖. (5.5)
Dengan menggabungkan persamaan (5.4) dan (5.5) dengan pertidaksamaan
(
( ) ∫ | ( )|
( ))
(
( ) ∫ | ( )|
( ))
(
( ) ∫ | ( )|
( ))
‖ ( )‖ ‖ ( )‖ ‖ ( )‖.
Oleh karena itu,
‖ ( )‖ ‖ ( )‖.
Selanjutnya dibahas tentang keterbatasan di Ruang Morey Klasik atas Ruang Metrik.
Dalam pembuktian keterbatasan operator integral fraksional pada Ruang Morey Klasik
dibutuhkan teorema berikut yang selanjutnya digunakan untuk membuktikan keterbatasan
operator integral pada Ruang Lebesgue dan akan diperumum menjadi Ruang Morrey
Klasik.
Teorema 5.4. Misalkan dan . Jika ∫ ( )
( )
maka
| ( )| ‖ ( )‖
( )
.
Bukti: Misalkan ( ) ∫ ( ( ))
( ) ( ) ( )
( ) ( ) dengan
( ) ∫ ( ( ))
( ) ( ) ( )
( ) dan ( ) ∫
( ( ))
( ) ( ) ( )
( ) .
Berdasarkan fakta bahwa ( ) dan sehingga ( ) ∫ ( )
diperoleh
| ( )| ∑ ∫ ( ( ))
( ) ( ) ( )
( )
∑ ( )
( )∫ | ( )| ( ) ( )
∑ ( )
( )∫ | ( )| ( ) ( )
( )∑ ( )
( ) ∑ ∫ ( )
( ) ∫
( )
( ) ∫
( )
.
Oleh karena itu,
| ( )| ( ) ∫ ( )
. (5.6)
Selanjutnya berdasarkan fakta bahwa ( ) dan sehingga ( )
∫ ( )
dan dengan menggunakan ketaksamaan Hӧlder diperoleh
| ( )| ∑ ∫ ( ( ))
( )| ( )| ( )
( )
∑ ( )
( )(∫ | ( )| ( )
( ) )
(∫ ( )
( ) )
‖ ( )‖∑ ( )
( )
‖ ( )‖∑ ∫
( )
‖ ( )‖ ∫
( )
.
Oleh karena itu,
| ( )| ‖ ( )‖ ∫ ( )
. (5.7)
Dengan memilih ‖ ( )‖
( ) dan berdasarkan fakta bahwa ∫
( ) ( )
diperoleh
| ( )| ( )
∫ ( )
‖ ( )‖ ∫
( )
Jurnal Matematika 201390

( )
∫ ( )
( )
‖ ( )‖ ∫
( ) ( )
∫ ( )
( )
( ( )
‖ ( )‖)
( )
‖ ( )‖
( ‖ ( )‖
( ) )
( ) (
‖ ( )‖
( ) )
‖ ( )‖,
sehingga
| ( )| ‖ ( )‖
( )
. (5.8)
Teorema 5.5. Misalkan dan . Jika ∫ ( )
( )
maka
terbatas dari ke didefinisikan sebagai
‖ ( )‖ ‖ ( )‖.
Bukti: Dengan menggunakan Teorema 2.4. dan apabila kedua ruas pada persamaan (5.8)
dipangkatkan diperoleh
‖ ( )‖ (∫ | ( )|
( ))
(∫ ‖ ( )‖ ( )
( ))
‖ ( )‖
(∫ ( ) ( )
)
‖ ( )‖.
Oleh karena itu,
‖ ( )‖ ‖ ( )‖.
Teorema 5.6. Misalkan dan . Jika
dan ∫
( ) ( )
, maka ‖ ( )‖ ‖ ( )‖.
Bukti : Misalkan ( ) ( ) ( ) dengan dan berdasarkan
Ketaksamaan Minkowski maka
(
( ) ∫ | ( )|
( ))
(
( ) ∫ | ( )|
( ))
(
( ) ∫ | ( )|
( ))
.
Diambil sebarang ( ). Misalkan ( ) dan . Karena dan
berdasarkan fakta bahwa
diperoleh
(
( ) ∫ | ( )|
( ))
( )
(∫ | ( )|
( ))
( )
(∫ | ( )|
( ))
‖ ( )‖.
Oleh karena itu,
(
( ) ∫ | ( )|
( ))
‖ ( )‖. (5.9)
Selanjutnya diambil sebarang ( ) dan . Karena dan
berdasarkan fakta bahwa
diperoleh
(
( ) ∫ | ( )|
( ))
( )
(∫ | ( )|
( ))
( )
(∫ | ( )|
( ))
‖ ( )‖.
Oleh karena itu,
Jurnal Matematika 201391

(
( ) ∫ | ( )|
( ))
‖ ( )‖. (5.10)
Dengan menggabungkan persamaan (5.9) dan (5.10) dengan pertidaksamaan
(
( ) ∫ | ( )|
( ))
(
( ) ∫ | ( )|
( ))
(
( ) ∫ | ( )|
( ))
‖ ( )‖ ‖ ( )‖ ‖ ( )‖.
Oleh karena itu,
‖ ( )‖ ‖ ( )‖.
6. Kesimpulan
Dari hasil pembahasan diperoleh kesimpulan bahwa terbatas dari ke jika
sedangkan terbatas dari ke jika
dan ∫
( ) ( )
.
7. Daftar Pustaka Adams, D. R. 1975. A Note on Riesz Potentials. Duke Math.J. 42(4), hal 765-778.
Bartle, R. G. 1966 The Elementsof Integration. John Wiley and Sons Inc., New York.
Brown, A. L. Dan Page, A. 1970. Elements of Functional Analysis. Van Nostrand Reinhold
Company, London.
Chiarenza, F. dan Frasca, M. 1997. Morrey Spaces and Hardy Littlewood Maximal
Functional. Rend. Mat. 7, hal 273-279.
Duoandikoetxea, J. 2001. Fourier Analysis. American Mathematical Society : Providence,
Rhode Island.
Eridani, Kokilashvili, V., dan Meskhi, A. 2009. Morrey Spaces and Fractional Integral
Operators. Expo.Math. 27(3), hal 227-239.
Evans, L. 1998. Partial Differential Equations. Graduate Studies in Math. 19, AMS.
Providence, Rhode Island.
Folland, G. B. 1999. Real Analysis, Modern Techniques and Teir Applications. Second
Edition. John Wiley and Sons Inc., New York.
Gunawan, H. Dan Eridani. 2009. Fractional Integral and Generalized Olsen Inequalities.
KYUNGPOOK Math. Journal 49, hal 31=39.
Kokilashvili, V. dan Meskhi, A. 2005. On Some Weighted Inequalities for Fractional
Integrals on Nonhomogeneous Spaces. Journal for Analysis and its Applications
24(4), hal 871-885.
Nakai, E. 1994. Hardy-Littlewood Maximal Operator, Singular Integral Operators and the
Riesz Potensials on Generalized Morrey Spaces. Math. Nacr. 166, hal 95-103.
Nakai, E. 2007. Recent Topics of Fractional Integrals. Sugaku Expositions Volume 20,
Number 2, hal 215-235.
Peetre, J. 1969. On the Teory of Space. J. Func. Anal. 4, hal 71-87.
Royden, H. L. Dan Fitzpatrick, P. M. 2010. Real Analysis, Fourth Edition. China Machine
Press : China.
Utoyo, M.I. 2013. Disertasi : Karakterisasi Keterbatasan Operator Integral Fraksional di
Ruang Morrey. Universitas Airlangga : Surabaya.
Jurnal Matematika 201392

ANALISIS MODEL PREDATOR-PREY DENGAN PEMANENAN SEBAGAI VARIABEL
KONTROL PADA PENANGKAPAN IKAN DENGAN AREA KONSERVASI
Titik Didayanti, Fatmawati, Miswanto
Departemen Matematika
Fakultas Sains dan Teknologi
Universitas Airlangga
Abstract. The activities of overfishing there is often we problem that caused reduced fish
populations and even extinction. Therefore, do some protection efforts fish from overfishing, by the
holding of the conservation area. This effort is expected to maintain fish populations from extinction
and increase the sustainability of marine ecosystems. Accordingly, in this thesis discussed the
predator-prey models with harvesting as a control variable in fishing conservation area.
Mathematical modelling of the predator-prey that describes the fishery resources in the sea divided
into three compartments, that is prey in the free area (x), prey on the conservation area (y), and
predators (z). Based on the results of analysis predator-prey models with constant harvesting there
are three equilibria, namely is the extinction equilibrium populations (𝐸0), the predator free
equilibrium (𝐸1), and three populations coexist equilibrium (𝐸2). We futher analyzed the stability
of the equilibria. By using the Pontryagin Maximum Principle we derive the existence of the optimal
control of the effort harvesting. The numerical simulations is given to illustrate the optimal control
strategy. The simulation results show that the optimal harvesting effort effectively to maximize
results and minimize costs in the harvesting effort, while increasing value of revenues.
Keywords : Predator-prey model, Harvesting, Conservation zone, Asimtomatis stability,
Optimal control.
1. Pendahuluan
Seiring pertumbuhan jumlah populasi manusia, kebutuhan untuk konsumsi ikan semakin
besar dan menyebabkan eksploitasi sumber daya ikan meningkat. Kemajuan teknologi saat ini juga
berpengaruh pada menurunnya populasi ikan. Hal ini karena kegiatan penangkapan ikan yang
berlebihan (overfishing) sering kali terdapat masalah yang menyebabkan populasi ikan berkurang
bahkan mengalami kepunahan (Yunfei, 2013). Penangkapan ikan secara berlebihan dan dengan cara
panen yang tidak diatur dapat berdampak pada penurunan produksi ikan dan mengancam kelestarian
ekosistem laut. Oleh karena itu, dilakukan suatu upaya perlindungan ikan dari penangkapan berlebih
(overfishing), yakni dengan diadakannya area konservasi. Upaya ini diharapkan dapat menjaga
populasi ikan dari ancaman kepunahan dan meningkatkan kelestarian ekosistem laut (Yunfei, 2013).
Ilmu matematika memberikan peranan penting untuk memahami dinamika populasi
predator-prey dengan pemanenan dan menentukan strategi yang tepat untuk pengoptimalan
pemanenan tersebut menggunakan model matematika. Dinamika atau perilaku model dapat diamati
dari kestabilan titik setimbang model. Sedangkan untuk pengoptimalan pemanenan diketahui
dengan menyelesaikan sistem menggunakan Prinsip Maksimum Pontryagin. Hal ini menunjukkan
model matematika mempunyai peranan penting dalam analisis kestabilan titik setimbang dan
optimal kontrol pemanenan model predator-prey dengan pemanenan. Pada model predator-prey
dengan pemanenan terbagi menjai tiga populasi dalam dua area berbeda. Populasi prey di area bebas
dan ada pula populasi prey di area konservasi, sedangkan populasi predator hanya terdapat di area
bebas.
Berdasarkan uraian tersebut, penulis tertarik untuk mengkaji model matematika yang terkait
dengan model perikanan dengan area konservasi. Materi yang dibahas bukan sesuatu yang baru
tetapi diambil dari jurnal yang berjudul “A prey-predator model with harvesting for fishery resource
with reserve area: Applied Mathematical Modelling”, yang ditulis oleh Yunfei Lv, dkk (2013).
Selanjutnya penulis akan mengkaji ulang model, kestabilan lokal dan optimal kontrol pemanenan
dari model tersebut.
Jurnal Matematika 201393

2. Analisis Kestabilan Untuk menganalisis kestabilan dari suatu model matematika yang berbentuk nonlinier, maka
langkah awal yang dilakukan adalah mencari titik setimbang dari model tersebut. titik setimbang
dapat diperoleh dengan menggunakan 𝑓(��) = 0 dengan �� adalah titik setimbang dan 𝑓(𝑥) =𝑑𝑥
𝑑𝑡
adalah persamaan diferensial yang autonomous (Olsder, 2003). Setelah didapatkan titik setimbang,
selanjutnya dilakukan analisis kestabilan. Berikut diberikan beberapa definisi dan teorema yang
berhubungan dengan analisis kestabilan sistem linier:
Definisi 3.1 Matriks Jacobian adalah matriks yang elemen-elemennya merupakan turunan parsial
pertama dari beberapa fungsi. Jika pada 𝓡3 terdapat persamaan-persamaan: 𝑑𝑥
𝑑𝑡= 𝑓(𝑥, 𝑦. 𝑧)
𝑑𝑦
𝑑𝑡= 𝑔(𝑥, 𝑦, 𝑧)
𝑑𝑧
𝑑𝑡= ℎ(𝑥, 𝑦, 𝑧)
sehingga bentuk matriks Jacobian yang berukuran 3 × 3 adalah:
𝐽 =
(
𝜕𝑓
𝜕𝑥
𝜕𝑓
𝜕𝑦
𝜕𝑓
𝜕𝑧𝜕𝑔
𝜕𝑥
𝜕𝑔
𝜕𝑦
𝜕𝑔
𝜕𝑧𝜕ℎ
𝜕𝑥
𝜕ℎ
𝜕𝑦
𝜕ℎ
𝜕𝑧)
.
(Zill dan Cullen, 2009)
Teorema 3.1 Sistem 𝑑𝑥(𝑡)
𝑑𝑡= 𝐴𝑥(𝑡) stabil asimtotis jika hanya jika semua nilai eigen dari A, yakni
𝜆𝑖(𝐴) mempunyai bagian real negatif dan dinotasikan sebagai 𝑅𝑒(𝜆𝑖(𝐴)) < 0.
(Zill and Cullen, 2009)
Pada permasalahan tertentu tanda bagian real dari nilai eigen tidak mudah ditentukan. Oleh
karena itu, perlu digunakan metode lain untuk menentukan tanda bagian real dari nilai eigen 𝜆.
Untuk matriks yang berukuran 𝑛 × 𝑛 tanda bagian real dari nilai eigen dapat ditentukan dengan
menggunakan kriteria Routh-Hurwitz, yaitu suatu metode untuk menunjukkan bahwa nilai eigen
bernilai negatif atau mempunyai bagian real yang negatif dengan memperhatikan koefisien dari
persamaan karakteristik tanpa menghitung akar-akar karakteristik secara langsung.
Misalkan diberikan persamaan karakteriktik yang berbentuk:
𝜆𝑛 + 𝛼1𝜆𝑛−1 + …+ 𝛼𝑛−1𝜆 + 𝛼𝑛 = 0 (4)
dengan 𝛼𝑗 adalah koefisien yang merupakan bilangan real, 𝑗 = 1,2, … , 𝑛.
Dari persamaan karakteristik (4) tersebut, dapat diperoleh 𝑛 matriks Hurwitz (𝐻𝑛) yang
didefinisikan sebagai berikut:
𝐻1 = (𝑎1), 𝐻2 = (𝑎1 1𝑎3 𝑎2
) , 𝐻3 = (𝑎1 1 0𝑎3 𝑎2 𝑎1𝑎5 𝑎4 𝑎3
)
𝐻𝑛 =
(
𝑎1𝑎3𝑎5
1 𝑎2 𝑎4
0𝑎1𝑎3
0 1 𝑎2
⋯⋯⋯
000
⋮𝑎𝑛
⋮ 𝑎𝑛−1
⋮ 𝑎𝑛−2
⋮𝑎𝑛−3
⋯⋯
⋮𝑎1
⋮𝑎2𝑛−1
⋮𝑎2𝑛−2
⋮ 𝑎2𝑛−3
⋮𝑎2𝑛−4
⋯⋯
⋮𝑎𝑛)
untuk 𝑛 (gasal),
dan 𝐻𝑛 =
(
𝑎1𝑎3𝑎5
1 𝑎2 𝑎4
0𝑎1𝑎3
0 1 𝑎2
⋯⋯⋯
000
⋮𝑎𝑛−1
⋮ 𝑎𝑛−2
⋮ 𝑎𝑛−3
⋮𝑎𝑛−4
⋯⋯
⋮1
⋮𝑎2𝑛−1
⋮𝑎2𝑛−2
⋮ 𝑎2𝑛−3
⋮𝑎2𝑛−4
⋯⋯
⋮𝑎𝑛)
untuk 𝑛 (genap),
dengan 𝑎𝑗 = {𝛼𝑗 , 𝑗 ≤ 𝑛
0 , 𝑗 > 𝑛 .
Teorema 3.2 (Kriteria Routh-Hurwitz) Akar-akar dari persamaan (4) bernilai negatif atau
mempunyai bagian real negatif jika dan hanya jika det (𝐻𝑗) > 0, 𝑗 = 1,2, … , 𝑛.
(Merkin, 1997)
Jurnal Matematika 201394

3. Kontrol Optimal Dalam menyelesaikan permasalahan kontrol optimal, salah satu metode yang dapat
digunakan adalah Prinsip Maksimum Pontryagin. Prinsip Maksimum Pontryagin merupakan suatu
kondisi sehingga dapat diperoleh penyelesaian kontrol optimal yang sesuai dengan tujuan
(memaksimalkan indeks performansi). Prosedur menyelesaikan masalah kontrol optimal dengan
menggunakan Prinsip Maksimum Pontryagin adalah sebagai berikut:
Diberikan persamaan state:
�� = 𝑓(𝑥(𝑡), 𝑢(𝑡), 𝑡) (5)
dengan 𝑥(𝑡) ∈ ℛ𝑛, 𝑢(𝑡) ∈ ℛ𝑚 dan indeks performansi:
𝑱 = 𝑆(𝑥(𝑡𝑓), 𝑡𝑓) + ∫ 𝑉(𝑥(𝑡), 𝑢(𝑡), 𝑡)𝑑𝑡𝑡𝑓𝑡0
(6)
dengan nilai kondisi batas 𝑥(𝑡0) = 𝑥0 dan 𝑡𝑓 diberikan, dan 𝑥(𝑡𝑓) = 𝑥𝑓 bebas.
Syarat cukup untuk memaksimalkan indeks performansi 𝑱 adalah mengkonversi persamaan
(5) dan (6) ke dalam masalah memaksimalkan fungsi Hamiltonian. Untuk mendapatkan syarat
tersebut dilakukan langkah-langkah sebagai berikut:
1) Bentuk fungsi Hamiltonian yaitu kombinasi fungsi dari suatu masalah (𝑉(𝑥(𝑡), 𝑢(𝑡), 𝑡)) dan
perkalian fungsi subyek berbentuk persamaan diferensial (𝑓(𝑥(𝑡), 𝑢(𝑡), 𝑡) dengan suatu faktor
pengali yang dinamakan pengali Lagrange 𝛾(𝑡). Berikut bentuk fungsi Hamiltonian:
𝐻(𝑥(𝑡), 𝑢(𝑡), 𝛾(𝑡), 𝑡) = 𝑉(𝑥(𝑡), 𝑢(𝑡), 𝑡) + 𝛾𝑇(𝑡)𝑓(𝑥(𝑡), 𝑢(𝑡), 𝑡). 2) Maksimumkan H terhadap semua vektor kontrol 𝑢(𝑡) sehingga diperoleh kondisi stasioner
sebagai berikut:
(𝜕𝐻
𝜕𝑢) = 0 sehingga diperoleh 𝑢∗(𝑡) = 𝐻(𝑥∗(𝑡), 𝛾∗(𝑡), 𝑡).
3) Gunakan hasil dari Langkah 2) ke dalam Langkah 1), sehingga diperoleh 𝐻 optimal yang
dinotasikan dengan 𝐻∗. 𝐻∗(𝑥∗(𝑡), 𝑢∗(𝑡), 𝛾∗(𝑡), 𝑡) = 𝐻∗(𝑥∗(𝑡), 𝛾∗(𝑡), 𝑡).
4) Selesaikan sekumpulan 2𝑛 persamaan yaitu persamaan state dan persamaan co-state seperti
berikut:
i. Persamaan state yaitu persamaan kendala pada model
��∗(𝑡) = (𝜕𝐻
𝜕𝛾) dengan diberikan nilai 𝑥(𝑡0) = 𝑥0.
ii. Persamaan co-state atau persamaan adjoint (𝛾) yang terkait dengan kendala akumulasi dari
variable keadaan.
��∗(𝑡) = −(𝜕𝐻
𝜕𝑥) dengan diberikan nilai 𝛾(𝑡𝑓) = (
𝜕𝑆
𝜕𝑥)|𝑡𝑓.
5) Untuk memperoleh kontrol yang optimal, substitusikan solusi 𝑥∗(𝑡) dan 𝛾∗(𝑡) dari Langkah 4)
ke dalam kendali optimal 𝑢∗(𝑡) pada Langkah 2).
(Naidu, 2002)
4. Hasil dan Pembahasan Berikut adalah model predator-prey dengan pemanenan pada penangkapan ikan dengan area
konservasi, dengan laju pemanenan konstan: 𝑑𝑥
𝑑𝑡= 𝑟𝑥 (1 −
𝑥
𝐾) − 𝜎1𝑥 + 𝜎2𝑦 −
𝜇1𝑥
𝛼+𝑥𝑧 − 𝑞1𝐸𝑥 (1)
𝑑𝑦
𝑑𝑡= 𝑠𝑦 (1 −
𝑦
𝐿) + 𝜎1𝑥 − 𝜎2𝑦 (2)
𝑑𝑧
𝑑𝑡=
𝛽1𝑥
𝛼+𝑥𝑧 − 𝑑𝑧 − 𝑞2𝐸𝑧 (3)
Persamaan (1) merepresentasikan laju perubahan populasi prey di area bebas sepanjang
waktu. Parameter 𝑟 menyatakan laju pertumbuhan prey yang berupa model logistik karena
dipengaruhi oleh besarnya daya tampung lingkungan (𝐾). Populasi bertambah karena adanya
emigrasi (𝜎2) prey dari area konservasi dan akan berkurang karena imigrasi (𝜎1) prey dari area
bebas, pemanenan atau penangkapan (𝐸) prey oleh manusia, serta karena adanya interaksi (predasi)
dengan predator.
Persamaan (2) menyatakan laju perubahan populasi prey di area konservasi sepanjang waktu.
Pertambahan populasi terjadi dengan adanya laju pertumbuhan dinotasikan dengan 𝑠 yang
merupakan pertumbuhan logistik, dan imigrasi prey dari area bebas. Sedangkan berkurangnya
karena emigrasi prey dari area konservasi.
Jurnal Matematika 201395

Persamaan (3) merupakan laju perubahan populasi predator. Populasi predator akan
bertambah dari hasil interaksinya dengan prey. Berkurangnya karena kematian alami dari predator
dan pemanenan atau penangkapan predator yang dilakukan oleh manusia.
Ada beberapa asumsi yang digunakan dalam model yaitu:
1. Populasi prey bersifat terbuka artinya ada perpindahan dari satu tempat ke tempat yang lain.
2. Populasi predator selalu hidup dan berada di area bebas tangkap, dan mendapatkan mangsa dari
area tersebut.
3. Kematian alami individu prey diasumsikan sangat sedikit, sehingga laju kematiannya diabaikan.
Notasi tersebut menyatakan jumlah individu dalam populasi tertentu, sehingga diasumsikan
𝑥, 𝑦, 𝑧 ≥ 0. Selain itu, parameter-parameter lain juga diasumsikan bernilai positif. Dalam penelitian
ini, jika tidak ada emigrasi populasi ikan dari area konservasi ke area bebas (𝜎2 = 0) dan 𝑟 − 𝜎1 −
𝑞1𝐸 < 0 maka 𝑑𝑥
𝑑𝑡< 0. Demikian pula, jika tidak ada imigrasi populasi ikan dari area bebas ke area
konservasi (𝜎1 = 0) dan 𝑠 − 𝜎2 < 0 maka 𝑑𝑦
𝑑𝑡< 0. Dapat dilihat juga bahwa ketika 𝛽1 < 𝑑 maka
𝑑𝑧
𝑑𝑡
akan selalu negatif. Oleh karena 𝑑𝑥
𝑑𝑡,𝑑𝑦
𝑑𝑡,𝑑𝑧
𝑑𝑡 menyatakan laju perubahan populasi, maka diasumsikan
bahwa 𝑟 − 𝜎1 − 𝑞1𝐸 > 0, 𝑠 − 𝜎2 > 0, dan 𝛽1 > 𝑑. Model predator-prey dengan pemanenan mempunyai tiga titik setimbang yaitu Titik
setimbang kepunahan populasi 𝐸0 = (0,0,0), titik setimbang kepunahan predator 𝐸1 = (𝑥1, 𝑦1, 0), dan titik setimbang ketiga populasi hidup berdampingan 𝐸2 = (𝑥2, 𝑦2, 𝑧2), dengan
𝑚 = 𝑟 − 𝜎1 − 𝑞1𝐸 𝑛 = 𝑠 − 𝜎2
𝑥1 =1
6𝐴1
3 −14𝐾2𝑚2
3𝑟2𝐴13
+2𝐾𝑚
3𝑟+
2𝑟𝐾𝐿𝜎2𝑛
𝑠𝑟2𝐴13
𝑦1 =1
36𝑟3𝐴23𝑠2𝐾𝜎2
[(−𝑟2𝐴2
3𝑠 + 28𝐾2𝑚2𝑠 − 4𝐾𝑚𝑟𝐴1
3𝑠 − 12𝑟𝐾𝐿𝜎2𝑛 + 6𝐾𝑟2𝐴
1
3𝑠 + 6𝐾𝑟𝐴1
3𝑠𝜎1 +
6𝐾𝑟𝐴1
3𝑠𝑞1𝐸) (−𝑟2𝐴
2
3𝑠 + 28𝐾2𝑚2𝑠 − 4𝐾𝑚𝑟𝐴1
3𝑠 − 12𝑟𝐾𝐿𝜎2𝑛)]
𝐴 =72𝐾2𝑚(𝑟𝐿𝜎2𝑛−𝑠𝐾𝑚
2)
𝑠𝑟3−
108𝐾2𝐿𝜎2(𝑛𝑚−𝜎1𝜎2)
𝑠𝑟2+
4096𝐾3𝑚3
𝑟3+ 12√3√𝐴1
𝐴1 =64𝑝3
(𝑠𝑟2)3+
4𝐾2𝑚2𝑝2
(𝑠𝑟4)2+
36𝑚𝐾3𝐿𝜎2𝑝(𝑛𝑚−𝜎1𝜎2)
𝑟(𝑠𝑟2)2+
729𝐾4𝐿2𝜎22(𝑛𝑚−𝜎1𝜎2)
2
(𝑠𝑟2)2−
512𝐾5𝑚3𝐿𝜎2(𝑛𝑚−𝜎1𝜎2)
𝑠𝑟5
𝑝 = 𝑠𝐾2𝑚2 − 𝑟𝐾𝐿𝜎2𝑛
ℎ = 𝑑 + 𝑞2𝐸
𝑥2 =ℎ𝛼
𝛽1−ℎ
𝑦2 =𝐿𝑛+√(𝐿𝑛)2+
4𝐿𝑠𝜎1ℎ𝛼
𝛽1−ℎ
2𝑠
𝑧2 = (𝑚
𝜇1−
ℎ𝛼𝑟
(𝛽1−ℎ)𝐾𝜇1+
𝜎2(𝛽1−ℎ)(𝐿𝑛+√(𝐿𝑛)2+
4𝐿𝑠𝜎1ℎ𝛼
𝛽1−ℎ)
2𝑠𝛼𝜇1ℎ)(
(𝛽1+2𝑞2𝐸)𝛼
𝛽1−ℎ). Titik setimbang 𝐸1 eksis jika
𝐴 > 0 dan 𝐴1 > 0. Hal ini dikarenakan jumlah populasi ikan tidak mungkin bernilai negatif
ataupun bernilai bilangan kompleks.
Selanjutnya akan dianalisis kestabilan pada setiap titik setimbang tersebut dengan
menggunakan kriteria nilai eigen dan Routh-Hurwitz. Untuk titik setimbang 𝐸0 didapatkan matriks
Jacobian,
𝐽𝐸0 = (
𝑟 − 𝜎1 − 𝑞1𝐸 𝜎2 0𝜎1 𝑠 − 𝜎2 00 0 −𝑑 − 𝑞2𝐸
).
𝐽𝐸0 merupakan hasil linierisasi dari model predator-prey dengan pemanenan pada Titik setimbang
𝐸0. Dari matriks Jacobian tersebut, dengan menggunakan det(𝐼 − 𝐽𝐸0) = 0, diperoleh persamaan
karakteristik
(−𝑑 − 𝑞2𝐸 − 𝜆)[𝜆2 − (𝑟 − 𝜎1 − 𝑞1𝐸 + 𝑠 − 𝜎2)𝜆 + ((𝑟 − 𝜎1 − 𝑞1𝐸)(𝑠 − 𝜎2) − 𝜎1𝜎2)] = 0.
Berdasarkan kriteria nilai eigen, syarat agar titik setimbang stabil asimtotis adalah bagian real dari
nilai eigen bernilai negatif. Titik setimbang 𝐸0 stabil asimtotis jika dan hanya jika 𝐵1 > 0 dan 𝐵2 >
0, dengan 𝐵1 = (𝑟 − 𝜎1 − 𝑞1𝐸 + 𝑠 − 𝜎2) dan 𝐵2 = ((𝑟 − 𝜎1 − 𝑞1𝐸)(𝑠 − 𝜎2) − 𝜎1𝜎2).
Untuk titik setimbang 𝐸1 didapatkan matriks Jacobian,
Jurnal Matematika 201396

𝐽𝐸1 =
(
𝑟 −
2𝑟
𝐾𝑥1 − 𝜎1 − 𝑞1𝐸 𝜎1 −
𝜇1𝑥1𝛼 + 𝑥1
𝜎1 𝑠 −2𝑠
𝐿𝑦1 − 𝜎2 0
0 0𝛽1𝑥1𝛼 + 𝑥1
− 𝑑 − 𝑞2𝐸)
Dari matriks Jacobian di atas, diperoleh persamaan karakteristik melalui 𝑑𝑒𝑡 (𝐽𝐸1 − 𝜆𝐼) = 0, yaitu
(𝛽1𝑥1
𝛼+𝑥1− 𝑑 − 𝑞2𝐸 − 𝜆) [𝜆
2 + (𝑚 + 𝑛 −2𝑟𝑥1
𝐾−
2𝑠𝑦1
𝐿) 𝜆 + ((𝑚 −
2𝑟𝑥1
𝐾) (𝑛 −
2𝑠𝑦1
𝐿) − 𝜎1𝜎2)] = 0.
Titik setimbang 𝐸1 stabil asimtotis jika dan hanya jika 𝐶1 > 0 dan 𝐶2 > 0, dengan
𝐶1 = (𝑚 + 𝑛 −2𝑟𝑥1
𝐾−
2𝑠𝑦1
𝐿) dan 𝐶2 = ((𝑚 −
2𝑟𝑥1
𝐾) (𝑛 −
2𝑠𝑦1
𝐿) − 𝜎1𝜎2).
Untuk titik setimbang 𝐸2 didapatkan matriks Jacobian,
𝐽𝐸2 =
(
𝑟 −
2𝑟𝑥2 𝐾
− 𝜎1 −𝜇1𝛼𝑧2
(𝛼 + 𝑥2)2− 𝑞1𝐸 𝜎2 −
𝜇1𝑥2𝛼 + 𝑥2
𝜎1 𝑠 −2𝑠𝑦2𝐿
− 𝜎2 0
𝛽1𝛼𝑧2(𝛼 + 𝑥2)
20
𝛽1𝑥2𝛼 + 𝑥2
− ℎ)
Dari matriks Jacobian tersebut, melalui 𝑑𝑒𝑡 (𝐽𝐸2 − 𝜆𝐼) = 0 diperoleh persamaan karakteristik yang
rumit. Oleh karena itu, penentuan kestabilan dari titik setimbang 𝐸2 dilakukan secara numerik. Hal
ini dilakukan dengan melakukan simulasi menggunakan software Maple dengan parameter yang
diketahui. Berikut adalah parameter yang akan digunakan:
Tabel 1 Nilai Parameter Model Predator-Prey
Parameter 𝑟 𝑠 𝐾 𝐿 𝑑 𝐸 𝜎1 𝜎2 𝑞1 𝑞2 𝜇1 𝛽1 𝛼
Nilai 5 4 40 60 0.3 1 2 2 0.1 0.2 0.94 0.9 1
Sumber : Yunfei, Lv., dkk (2013)
Tabel 2 Nilai Awal Variabel
Nilai Awal 𝑥(0) 𝑦(0) 𝑧(0) Warna
1 35 30 20 Merah
2 30 25 15 Biru
3 25 30 25 Hijau
Berdasarkan nilai parameter dan nilai awal pada Tabel 1 dan Tabel 2 diperoleh titik setimbang ketiga
populasi hidup berdampingan (𝐸2), yaitu: 𝐸2 = (1.25 ; 31.20185175 ; 126.0639402). Berikut ini
hasil simulasi antara populasi prey di area bebas dengan populasi predator, hasil simulasi
menggunakan bidang fase:
Gambar 1 Grafik Bidang Fase Model Predator-Prey
Pada Gambar 1 di atas terlihat bahwa dari ketiga nilai awal yang diberikan, semuanya
mengarah ke titik setimbang 𝐸2. Dengan demikian, secara numerik titik setimbang ketiga populasi
hidup berdampingan 𝐸2 = (𝑥, 𝑦, 𝑧) = (𝑥2, 𝑦2, 𝑧2) pada model predator-prey dengan pemanenan
pada penangkapan ikan dengan area konservasi cenderung stabil asimtotis jika 𝑎1 > 0, 𝑎2 > 0, 𝑎3 >0, dan 𝑎1𝑎2 − 𝑎3 > 0. Selanjutnya akan ditinjau untuk kasus dengan usaha pemanenan yang bergantung terhadap
waktu 𝐸(𝑡), sehingga diasumsikan laju pemanenan 𝐸(𝑡) sebagai variabel kontrol dari model berikut:
𝑑𝑥
𝑑𝑡= 𝑟𝑥 (1 −
𝑥
𝐾) − 𝜎1𝑥 + 𝜎2𝑦 −
𝜇1𝑥
𝛼+𝑥𝑧 − 𝑞1𝐸(𝑡)𝑥
Jurnal Matematika 201397

𝑑𝑦
𝑑𝑡= 𝑠𝑦 (1 −
𝑦
𝐿) + 𝜎1𝑥 − 𝜎2𝑦 (7)
𝑑𝑧
𝑑𝑡=
𝛽1𝑥
𝛼+𝑥𝑧 − 𝑑𝑧 − 𝑞2𝐸(𝑡)𝑧.
Untuk mendapatkan pemanenan yang optimal akan diterapkan metode kontrol optimal
dengan menggunakan Prinsip Maksimum Pontryagin. Dengan demikian dapat diperoleh hasil
pemanenan optimal tetapi populasi ikan di area bebas tidak punah. Indeks performansi (fungsi
tujuan) dari model predator-prey dengan pemanenan pada penangkapan ikan dengan area
konservasi dapat didefinisikan sebagai berikut:
𝑱 = ∫ (𝑝1𝑞1𝐸(𝑡)𝑥 + 𝑝2𝑞2𝐸(𝑡)𝑧 −1
2𝐶𝐸(𝑡)2) 𝑑𝑡
𝑡𝑓0
. (8)
Persamaan (8) merepresentasikan tujuan optimal kontrol untuk memaksimalkan fungsi 𝑱 sehingga diperoleh pemanenan yang optimal. Parameter 𝑝1 dan 𝑝2 masing-masing merupakan
konstanta harga per satuan ikan prey dan predator yang tertangkap. Sedangkan parameter 𝐶
merupakan biaya pemanenan atau penangkapan tiap satuan usaha.
Berdasarkan Prinsip Maksimum Pontryagin, langkah pertama yang harus dilakukan yaitu
membentuk fungsi Hamiltonian. Berikut merupakan bentuk fungsi Hamiltonian pada model
predator-prey dengan pemanenan:
𝐻(𝑥, 𝐸, 𝛾, 𝑡) = (𝑝1𝑞1𝐸(𝑡)𝑥 + 𝑝2𝑞2𝐸(𝑡)𝑧 −1
2𝐶𝐸(𝑡)2) + (𝛾1 𝛾2 𝛾3)
(
𝑟𝑥 (1 −
𝑥
𝐾) − 𝜎1𝑥 + 𝜎2𝑦 −
𝜇1𝑥
𝛼+𝑥𝑧 − 𝑞1𝐸(𝑡)𝑥
𝑠𝑦 (1 −𝑦
𝐿) + 𝜎1𝑥 − 𝜎2𝑦
𝛽1𝑥
𝛼+𝑥𝑧 − 𝑑𝑧 − 𝑞2𝐸(𝑡)𝑧 )
= 𝑝1𝑞1𝐸(𝑡)𝑥 + 𝑝2𝑞2𝐸(𝑡)𝑧 −1
2𝐶𝐸(𝑡)2 + 𝛾1 (𝑟𝑥 (1 −
𝑥
𝐾) − 𝜎1𝑥 + 𝜎2𝑦 −
𝜇1𝑥
𝛼+𝑥𝑧 − 𝑞1𝐸(𝑡)𝑥) +
𝛾2 (𝑠𝑦 (1 −𝑦
𝐿) + 𝜎1𝑥 − 𝜎2𝑦) + 𝛾3 (
𝛽1𝑥
𝛼+𝑥𝑧 − 𝑑𝑧 − 𝑞2𝐸(𝑡)𝑧).
(9)
Langkah selanjutnya untuk mendapatkan kondisi optimal dari fungsi Hamiltonian
𝐻(𝑥, 𝐸, 𝛾, 𝑡) terhadap vektor kontrol 𝐸(𝑡) sehingga diperoleh kondisi stasioner sebagai berikut: 𝜕𝐻
𝜕𝐸= 0
⟺ 𝑝1𝑞1𝑥 + 𝑝2𝑞2𝑧 − 𝐶𝐸 − 𝛾1𝑞1𝑥 − 𝛾3𝑞2𝑧 = 0
⟺ 𝐶𝐸 = 𝑞1𝑥(𝑝1 − 𝛾1) + 𝑞2𝑧(𝑝2 − 𝛾3)
⟺ 𝐸∗ =𝑞1𝑥(𝑝1−𝛾1)+𝑞2𝑧(𝑝2−𝛾3)
𝐶. (10)
Karena batas nilai 𝐸∗ adalah 0 ≤ 𝐸∗ ≤ 1 sehingga terdapat beberapa kemungkinan nilai 𝐸∗, yaitu:
𝐸∗ =
{
0, jika
𝑞1𝑥(𝑝1−𝛾1)+𝑞2𝑧(𝑝2−𝛾3)
𝐶≤ 0
𝑞1𝑥(𝑝1−𝛾1)+𝑞2𝑧(𝑝2−𝛾3)
𝐶, jika 0 <
𝑞1𝑥(𝑝1−𝛾1)+𝑞2𝑧(𝑝2−𝛾3)
𝐶< 1.
1, jika𝑞1𝑥(𝑝1−𝛾1)+𝑞2𝑧(𝑝2−𝛾3)
𝐶≥ 1
(11)
Dengan demikian dari beberapa kemungkinan tersebut, maka nilai kontrol optimal adalah
𝐸∗ = 𝑚𝑖𝑛 (𝑚𝑎𝑥 (0,𝑞1𝑥(𝑝1−𝛾1)+𝑞2𝑧(𝑝2−𝛾3)
𝐶) , 1).
Selanjutnya, karena bentuk kontrol optimal 𝐸∗ masih mengandung variabel state yaitu 𝑥 dan
𝑧, sehingga persamaan state tersebut perlu diselesaikan. Berikut persamaan state yang diperoleh:
�� =𝜕𝐻
𝜕𝛾1= 𝑟𝑥 (1 −
𝑥
𝐾) − 𝜎1𝑥 + 𝜎2𝑦 −
𝜇1𝑥
𝛼+𝑥𝑧 − 𝑞1𝐸(𝑡)𝑥
�� =𝜕𝐻
𝜕𝛾2= 𝑠𝑦 (1 −
𝑦
𝐿) + 𝜎1𝑥 − 𝜎2𝑦
�� =𝜕𝐻
𝜕𝛾3=
𝛽1𝑥
𝛼+𝑥𝑧 − 𝑑𝑧 − 𝑞2𝐸(𝑡)𝑧.
Namun, selain variabel state pada kontrol optimal 𝐸∗ juga terdapat variabel co-state yaitu 𝛾1 dan 𝛾3,
maka dari itu persamaan co-state perlu diselesaikan sehingga diperoleh:
��1 = −𝜕𝐻
𝜕𝑥= −𝑝1𝑞1𝐸(𝑡) − 𝛾1 (𝑟 −
2𝑟
𝐾− 𝜎1 −
𝜇1𝑧𝛼
(𝛼+𝑥)2− 𝑞1𝐸) − 𝛾2𝜎1 − 𝛾3
𝛽1𝑧𝛼
(𝛼+𝑥)2
��2 = −𝜕𝐻
𝜕𝑦= −𝛾1𝜎2 − 𝛾2 (𝑠 −
2𝑠
𝐿− 𝜎2)
��3 = −𝜕𝐻
𝜕𝑧= −𝑝2𝑞2𝐸(𝑡) + 𝛾1
𝜇1𝑥
(𝛼+𝑥)− 𝛾3 (
𝛽1𝑥
(𝛼+𝑥)− 𝑑 − 𝑞2𝐸).
Berdasarkan uraian tersebut, untuk mendapatkan nilai 𝑥, 𝑦 dan 𝑧 dengan bentuk 𝐸∗ yang
optimal maka perlu menyelesaikan persamaan state dan co-state yang berbentuk persamaan tak
linier. Sistem persamaan tak linier sangat sulit untuk diselesaikan secara analitik, oleh karena itu
dilakukan pendekatan secara numerik untuk menyelesaikan persamaan tak linier tersebut.
Jurnal Matematika 201398

5. Simulasi Numerik
1) Simulasi Dinamika Populasi Ikan dengan Pemanenan Konstan
Gambar 2 Dinamika Populasi Ikan dengan Pemanenan Konstan
Gambar 2 di atas menyatakan bahwa populasi predator (warna hijau) akan selalu lebih
banyak dari populasi prey di area bebas (warna merah) dan populasi prey di area konservasi (warna
biru). Meskipun populasi predator selalu lebih banyak dari populasi prey, populasi prey tidak punah
karena terjaga dengan adanya populasi prey di area konservasi. Dari Gambar 2 tersebut dapat
diketahui bahwa ketiga populasi akan hidup berdampingan dan tidak mengalami perubahan secara
signifikan pada saat hari ke-10 dan seterusnya.
2) Simulasi Dinamika Populasi Ikan dengan Kontrol Optimal Pemanenan
Berikut merupakan hasil simulasi dari efektivitas optimal kontrol pemanenan 𝐸(𝑡) dan tanpa
kontrol, populasi prey di area bebas, prey di area konservasi, dan predator berturut-turut.
Gambar 3 Populasi Prey di Area Bebas Dengan dan Tanpa Kontrol Pemanenan
Gambar 4 Populasi Prey di Area Konservasi Dengan dan Tanpa Kontrol Pemanenan
0 10 20 30 40 50 60 70 80 90 1000
20
40
60
80
100
120
140
160
180laju perubahan populasi
t waktu
jumlah
pop
ulasi
X(t)
Y(t)
Z(t)
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
35
40
t waktu
X(t)
popu
lasi p
rey
di ar
ea b
ebas
max J0=37710.52928978 [FMINCON: 1e-010; CVODEs: 1e-012; N=10; MATLAB]
dengan kontrol
tanpa kontrol
0 10 20 30 40 50 60 70 80 90 10025
30
35
40
45
50
55
t waktu
Y(t)
popu
lasi
pre
y di
are
a ko
nser
vasi
max J0=37710.52928978 [FMINCON: 1e-010; CVODEs: 1e-012; N=10; MATLAB]
dengan kontrol
tanpa kontrol
Jurnal Matematika 201399

Gambar 5 Populasi Predator Dengan dan Tanpa Kontrol Pemanenan
Gambar 3 menunjukkan perbedaan populasi prey di area bebas tanpa kontrol pemanenan
dengan populasi prey di area bebas dengan kontrol pemanenan. Berdasarkan gambar di atas dapat
diketahui bahwa populasi prey di area bebas dengan kontrol pemanenan lebih banyak dibandingkan
dengan populasi prey di area bebas tanpa kontrol pemanenan. Populasi prey di area bebas dengan
kontrol pemanenan berhenti mengalami penurunan pada hari 5, setelah itu populasi meningkat
hingga hari ke-11 dan selanjutnya populasi bernilai konstan. Sedangkan untuk populasi prey tanpa
kontrol pemanenan lebih sedikit meskipun populasi prey tidak mengalami pemanenan disebabkan
karena populasi predator yang meningkat akibat tidak adanya pemanenan terhadap populasi
predator juga.
Gambar 4 menunjukkan perbedaan populasi prey di area konservasi tanpa kontrol pemanenan
dengan populasi prey di area konservasi dengan kontrol pemanenan. Berdasarkan grafik, dapat
diketahui bahwa populasi prey di area konservasi dengan kontrol pemanenan lebih banyak
dibandingkan dengan populasi prey di area konservasi tanpa kontrol pemanenan. Populasi prey di
area konservasi dengan kontrol pemanenan berhenti mengalami penurunan pada hari ke-8, setelah
itu populasi meningkat hingga hari ke-15 dan selanjutnya populasi bernilai konstan. Meskipun
populasi prey di area konservasi tidak mengalami pemanenan, tetapi populasi prey di area konservasi
terkait dengan populasi prey di area bebas. Dari sini dampak yang ada pada populasi prey di area
bebas, berpengaruh pula terhadap populasi prey di area konservasi.
Gambar 5 menyatakan perbedaan populasi predator dengan kontrol pemanenan lebih sedikit
daripada populasi predator tanpa kontrol pemanenan. Populasi predator tanpa kontrol pemanenan
lebih banyak dikarenakan populasi predator tidak mengalami pemanenan sehingga populasi terus
mengalami peningkatan. Akan tetapi, hal tersebut berdampak pada penurunan populasi prey di area
bebas. Sedangkan untuk populasi predator dengan kontrol pemanenan pada awal waktu mengalami
peningkatan hingga hari ke-5, kemudian menurun hingga hari ke-15. Selanjutnya populasi bersifat
konstan hingga hari ke-90, kemudian mengalami penurunan kembali. Perbedaan antara populasi
predator tanpa dan dengan kontrol pemanenan sangat signifikan, hal ini dikarenakan pada
pembahasan ini predator merupakan ikan besar sehingga tingkat pemanenannya lebih besar
dibandingkan dengan populasi prey yang merupakan ikan yang lebih kecil.
7. Kesimpulan
1) Berdasarkan hasil analisis kestabilan titik kesetimbangan dari model predator-prey dengan
pemanenan pada penangkapan ikan dengan area konservasi, terdapat tiga titik setimbang yang
diperoleh antara lain:
a. Titik setimbang kepunahan populasi adalah 𝐸0 = (𝑥, 𝑦, 𝑧) = (0,0,0). Titik setimbang 𝐸0
stabil asimtotis jika dan hanya jika 𝐵1 > 0 dan 𝐵2 > 0, dengan 𝐵1 = (𝑟 − 𝜎1 − 𝑞1𝐸 + 𝑠 −
𝜎2) dan 𝐵2 = ((𝑟 − 𝜎1 − 𝑞1𝐸)(𝑠 − 𝜎2) − 𝜎1𝜎2).
b. Titik setimbang kepunahan predator adalah 𝐸1 = (𝑥, 𝑦, 𝑧) = (𝑥1, 𝑦1 , 0), dengan
𝑥1 =1
6𝐴1
3 −14𝐾2𝑚2
3𝑟2𝐴13
+2𝐾𝑚
3𝑟+
2𝑟𝐾𝐿𝜎2𝑛
𝑠𝑟2𝐴13
𝑦1 =1
36𝑟3𝐴23𝑠2𝐾𝜎2
[(−𝑟2𝐴2
3𝑠 + 28𝐾2𝑚2𝑠 − 4𝐾𝑚𝑟𝐴1
3𝑠 − 12𝑟𝐾𝐿𝜎2𝑛 + 6𝐾𝑟2𝐴
1
3𝑠 +
6𝐾𝑟𝐴1
3𝑠𝜎1 + 6𝐾𝑟𝐴1
3𝑠𝑞1𝐸) (−𝑟2𝐴
2
3𝑠 + 28𝐾2𝑚2𝑠 − 4𝐾𝑚𝑟𝐴1
3𝑠 − 12𝑟𝐾𝐿𝜎2𝑛)]
𝑚 = 𝑟 − 𝜎1 − 𝑞1𝐸
0 10 20 30 40 50 60 70 80 90 10020
40
60
80
100
120
140
160
180
200
t waktu
Z(t)
popu
lasi p
reda
tor
max J0=37710.52928978 [FMINCON: 1e-010; CVODEs: 1e-012; N=10; MATLAB]
dengan kontrol
tanpa kontrol
Jurnal Matematika 2013100

𝑛 = 𝑠 − 𝜎2
𝐴 =72𝐾2𝑚(𝑟𝐿𝜎2𝑛−𝑠𝐾𝑚
2)
𝑠𝑟3−
108𝐾2𝐿𝜎2(𝑛𝑚−𝜎1𝜎2)
𝑠𝑟2+
4096𝐾3𝑚3
𝑟3+ 12√3√𝐴1
𝐴1 =64𝑝3
(𝑠𝑟2)3+
4𝐾2𝑚2𝑝2
(𝑠𝑟4)2+
36𝑚𝐾3𝐿𝜎2𝑝(𝑛𝑚−𝜎1𝜎2)
𝑟(𝑠𝑟2)2+
729𝐾4𝐿2𝜎22(𝑛𝑚−𝜎1𝜎2)
2
(𝑠𝑟2)2−
512𝐾5𝑚3𝐿𝜎2(𝑛𝑚−𝜎1𝜎2)
𝑠𝑟5
𝑝 = 𝑠𝐾2𝑚2 − 𝑟𝐾𝐿𝜎2𝑛. Titik setimbang 𝐸1 = (𝑥, 𝑦, 𝑧) = (𝑥1, 𝑦1, 0) stabil asimtotis jika
dan hanya jika 𝐶1 > 0 dan 𝐶2 > 0, dengan 𝐶1 = (𝑚 + 𝑛 −2𝑟𝑥1
𝐾−
2𝑠𝑦1
𝐿) dan
𝐶2 = ((𝑚 −2𝑟𝑥1
𝐾) (𝑛 −
2𝑠𝑦1
𝐿) − 𝜎1𝜎2).
c. Titik setimbang ketiga spesies hidup berdampingan yaitu 𝐸2 = (𝑥, 𝑦, 𝑧) = (𝑥2, 𝑦2 , 𝑧2), dengan
𝑥2 =ℎ𝛼
𝛽1−ℎ
𝑦2 =𝐿𝑛+√(𝐿𝑛)2+
4𝐿𝑠𝜎1ℎ𝛼
𝛽1−ℎ
2𝑠
𝑧2 = (𝑚
𝜇1−
ℎ𝛼𝑟
(𝛽1−ℎ)𝐾𝜇1+
𝜎2(𝛽1−ℎ)(𝐿𝑛+√(𝐿𝑛)2+
4𝐿𝑠𝜎1ℎ𝛼
𝛽1−ℎ)
2𝑠𝛼𝜇1ℎ)(
(𝛽1+2𝑞2𝐸)𝛼
𝛽1−ℎ)
𝑚 = 𝑟 − 𝜎1 − 𝑞1𝐸
𝑛 = 𝑠 − 𝜎2
ℎ = 𝑑 + 𝑞2𝐸. Kestabilan titik setimbang 𝐸2 secara numerik, cenderung stabil asimtotis
jika 𝑎1 > 0, 𝑎2 > 0, 𝑎3 > 0, dan 𝑎1𝑎2 − 𝑎3 > 0. 2) Berdasarkan analisis usaha pemanenan yang optimal untuk model predator-prey dengan
pemanenan pada penangkapan ikan dengan area konservasi, didapatkan usaha pemanenan yang
optimal adalah 𝐸∗ = 𝑚𝑖𝑛 (𝑚𝑎𝑥 (0,𝑞1𝑥(𝑝1−𝛾1)+𝑞2𝑧(𝑝2−𝛾3)
𝐶) , 1). Berdasarkan simulasi numerik
yang dilakukan, diperoleh hasil kontrol optimal pemanenan yang dapat memaksimalkan hasil
pemanenan dan meminimalkan biaya dalam usaha pemanenan, sekaligus dapat memaksimalkan
pendapatan adalah antara 0.77 dan 0.95 atau dapat diartikan usaha optimal sebesar 77% hingga
95%.
8. Daftar Pustaka
Arjudin, 2003, Penyelesaian Umum Persamaan Kubik dalam Pengajaran Matematika, Jurnal Ilmu
Pendidikan, No.55 Tahun XV, hal.1145-1157.
Merkin, D.R., 1997, Introduction to the Theory of Stability, Springer, New York.
Naidu D.S., 2002, Optimal Control System, CRC Press, New York.
Olsder, G.J., 2003, Mathematical System Theory, Delft, The Natherland.
Yunfei, Lv., dkk., 2013, A Predator-Prey Model with Harvesting for Fishery Resource with Reserve
Area, Applied Mathematical Modelling vol. 37, 3048-3062, Elsevier.
Zill, D. G. and Cullen, M. R., 2009, Differential Equation with Boundary Value Problem Fourth
Edition, An International Tomsons Publishing Company, USA.
Jurnal Matematika 2013101
Related Documents











