Penerbit Universitas Krisnadwipayana (Dikelola Oleh Fakultas Teknik Prodi Teknik Elektro) JURNAL ELEKTROKRISNA UNIVERSITAS KRISNADWIPAYANA Rancang Bangun Alat Injeksi Kaitannya terhadap Penurunan Kapasitas Transformator, Oleh : Abdul Kodir Al Bahar Modifikasi Pengkabelan Pada Kontrol Kipas Pendingin Udara Pada PLTU Banten 3 Lontar, Oleh : Ahmad Rofi’i Analisa Sistem Pentanahan Pada Gedung Dirjen Pajak Oleh : Lukman Aditya Analisa Pengoprasian Secondary Surveillance Radar (SSR) Di Bandara Soekarno- Hatta, Oleh : Selamet Purwo Santoso Analisa Kinerja Jaringan LAN Menggunakan Metode Quality of Service Oleh : Sri Hartanto Analisa Pengukuran Kecepatan Putaran Motor Induksi 3 Phasa Berdasarkan Frekwensi, Oleh : Teten Dian Hakim Perencanaan dan Analisa Sistem Pentanahan Pada Pembangkit Listrik Tenaga Gas 100 MW di Gorontalo, Oleh : Ujang Wiharja Analisa Pentanahan Elektroda Batang Pada stop Kontak Untuk Menekan Biaya Listrik, Oleh : Nurhabibah Naibaho Rancang Bangun Rangkaian Pengendali Lampu Jarak Jauh Menggunakan Bloetooth, Oleh : Vita Nurdinawati Vol. 5 No. 3 Juni 2017 ISSN : 2302-4712

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Penerbit Universitas Krisnadwipayana
(Dikelola Oleh Fakultas Teknik Prodi Teknik Elektro)
JURNAL ELEKTROKRISNA UNIVERSITAS KRISNADWIPAYANA
Rancang Bangun Alat Injeksi Kaitannya terhadap Penurunan Kapasitas
Transformator, Oleh : Abdul Kodir Al Bahar
Modifikasi Pengkabelan Pada Kontrol Kipas Pendingin Udara Pada PLTU
Banten 3 Lontar, Oleh : Ahmad Rofi’i
Analisa Sistem Pentanahan Pada Gedung Dirjen Pajak
Oleh : Lukman Aditya
Analisa Pengoprasian Secondary Surveillance Radar (SSR) Di Bandara Soekarno-
Hatta, Oleh : Selamet Purwo Santoso
Analisa Kinerja Jaringan LAN Menggunakan Metode Quality of Service Oleh :
Sri Hartanto
Analisa Pengukuran Kecepatan Putaran Motor Induksi 3 Phasa
Berdasarkan Frekwensi, Oleh : Teten Dian Hakim
Perencanaan dan Analisa Sistem Pentanahan Pada Pembangkit Listrik Tenaga
Gas 100 MW di Gorontalo, Oleh : Ujang Wiharja
Analisa Pentanahan Elektroda Batang Pada stop Kontak Untuk Menekan Biaya
Listrik, Oleh : Nurhabibah Naibaho
Rancang Bangun Rangkaian Pengendali Lampu Jarak Jauh Menggunakan
Bloetooth, Oleh : Vita Nurdinawati
Vol. 5 No. 3 Juni 2017 ISSN : 2302-4712
Jurnal Ilmiah Elektrokrisna Vol 5 No 3 Juni 2017 ISSN : 2302-4712
ii
SUSUNAN DEWAN REDAKSI
Penanggung Jawab
Ir. Ayub Muktiono, MSiP
(Dekan Fakultas Teknik Universitas Krisnadwipayana )
Penasehat
Dr. Ir. Semuel Th Salean. MSi
(P2M FT. Universitas Krisnadwipayana)
Pemimpin Redaksi
Dr. Zefri, MSi
Tim Redaksi
Ir. Teten Dian Hakim, MT
Slamet Purwo Santosa, ST. MT
Ir. Nurmiati Pasra, MT (Dosen STT-PLN)
Penyunting Ahli
Sri Hartanto, ST. MT
Dr. Ir. Sutjipto.Suwono, Dipl.GE ( Dosen STT-PLN)
Ir. Achmad Rofi,i. MT (Dosen Univ.17 Agustus Jkt)
Kesekretariatan
Dwi Octaviana, S.Sos, MSi
ALAMAT PENERBIT
Universitas Krisnadwipayana
Jl. Kampus UNKRIS Jatiwaringin, Jakarta 13077
Gedung G (Fakultas Teknik) Lantai 2 Ruang Seketariat Jurusan Teknik Elektro
Telepon :.021-84998529
E-Mail : [email protected]

Jurnal Ilmiah Elektrokrisna Vol 5 No 3 Juni 2017 ISSN : 2302-4712
iii
PENGANTAR REDAKSI
Bismillahir rahmanir rahiim.
Puji syukur kami panjatkan kehadirat Allah Subhanahu wa Ta’ala karena dengan
pertolongan-Nya, Jurnal Ilmiah Elektrokrisna akhirnya dapat terbit. Dengan
hadirnya Jurnal Ilmiah Elektrokrisna, diharapkan semua tulisan ilmiah yang berkaitan
dengan bidang keilmuan Elektro dapat dipublikasikan secara luas, baik di kalangan
ilmuwan Elektro, maupun masyarakat pada umumnya. Selanjutnya, dengan hadirnya
Jurnal Ilmiah Elektrokrisna dapat menjadi sarana publikasi bagi tulisan-tulisan ilmiah yang
dihasilkan oleh civitas academica Jurusan Teknik Elektro Fakultas Teknik Universitas
Krisnadwipayana, baik Dosen maupun Mahasiswa yang telah menyelesaikan penyusunan
skripsinya.
Jurnal Ilmiah Elektrokrisna menerima tulisan ilmiah berupa hasil-hasil penelitian,
dan atau kajian ilmiah yang menjelaskan konsep keilmuan dan ide-ide baru mengenai
bidang keilmuan teknik elektro dengan subbidangnya seperti teknik energi listrik, teknik
telekomunikasi, teknik kontrol, teknik elektronika dan instrumentasi, teknik komputer dan
teknik informasi multimedia.
Demikianlah prakata dari redaksi, semoga Jurnal Ilmiah Elektrokrisna dapat
bermanfaat dan dapat ikut serta berperan dalam perkembangan ilmu pengetahuan dan
teknologi, khususnya di bidang elektro.
Wassalam,
Redaksi
Jurnal Ilmiah Elektrokrisna Vol 5 No 3 Juni 2017 ISSN : 2302-4712
iv
KETENTUAN PENULISAN
1. Tulisan ilmiah diketik komputer pada kertas A4 (210 x 297 mm) dengan margin atas,
bawah = 3 cm, dan margin kanan, kiri = 3,5 cm, spasi = 1 (single) serta bentuk huruf
Times New Romans dengan ukuran = 12
2. Jumlah halaman dibatasi antara 7 sampai dengan 10 halaman.
3. Jumlah kata dalam judul Bahasa Indonesia maksimal = 12 kata dan bila dalam Bahasa
Inggris, berjumlah maksimal = 10 kata
4. Nama penulis makalah dicantumkan setelah judul, dengan ketentuan
a. Nama penulis dicantumkan tanpa gelar, jabatan atau kepangkatan.
b. Bila terdapat lebih dari satu nama, maka nama penulis utama dicantumkan terlebih
dahulu baru dilanjutkan dengan nama-nama penulis lainnya.
c. Jumlah maksimal penulis = 3 orang.
5. Tulisan diawali dengan abstrak berupa satu paragraf dalam Bahasa Indonesia dan satu
paragraf berikutnya, merupakan terjemahan dalam Bahasa Inggris. Abstrak adalah
esensi isi keseluruhan tulisan secara utuh dan lengkap.
6. Cantumkan kata kunci setelah abstrak untuk membantu keteraksesan tulisan.
7. Sistematika isi tulisan mengkuti kaidah keilmuan, minimal tersusun dari pendahuluan,
teori-teori yang mendukung penelitian atau kajian ilmiah, hasil-hasil penelitian atau
kajian ilmiah, kesimpulan dan daftar pustaka.
8. Tata letak isi penulisan menggunakan format dua lajur (kolom).
9. Ketentuan mengenai daftar pustaka adalah
a. Dicantumkan berurutan, dimana urutan pertama adalah referensi yang dikutip
pertamakali dalam isi tulisan, dan seterusnya.
b. Diawali dengan nomor urut, yaitu [1], [2] dan seterusnya ke bawah
c. Susunannya mengikuti urutan berikut (dipisahkan dengan koma) :
1) Penulis, bila lebih dari tiga penulis, berikutnya ditulis et all (dkk)
2) Judul referensi (judul buku atau judul dalam jurnal ilmiah)
3) Tahun penerbitan buku atau tahun publikasi tulisan ilmiah.
4) Nama penerbit (buku) atau nama jurnal ilmiah referensi (disertai dengan nomor,
volume, bulan terbit, dan halaman referensi).

Jurnal Ilmiah Elektrokrisna Vol 5 No 3 Juni 2017 ISSN : 2302-4712
v
DAFTAR ISI
Sampul Depan………………………………………………...…………........…………i
Susunan Dewan Redaksi…………………………………...………….………........…..ii
Alamat Penerbit……………………….…………….………...…….........………...…...ii
Pengantar Redaksi…………………….…………………………..........………………iii
Ketentuan Penulisan……………………………………………........…………………iv
Daftar Isi………………………………………………………………........…………...v
I. Rancang Bangun Alat Injeksi Kaitannya terhadap Penurunan
Kapasitas Transformator, Oleh : Abdul Kodir Al Bahar ………….....…74-83
II. Modifikasi Pengkabelan Pada Kontrol Kipas Pendingin Udara
Pada PLTU Banten 3 Lontar, Oleh : Ahmad Rofi’i ..........................................84-91
III. Analisa Sistem Pentanahan Pada Gedung Dirjen Pajak
Oleh : Lukman Aditya ………..................….............………………………… 92-99
IV. Analisa Pengoprasian Secondary Surveillance Radar (SSR)
Di Bandara Soekarno-Hatta, Oleh : Selamet Purwo Santoso .….........…… 100-111
V. Maintenance Analisa Kinerja Jaringan LAN Menggunakan Metode
Quality of Service (QoS), Oleh : Sri Hartanto .............................................. 112-121
VI. Analisa Pengukuran Kecepatan Putaran Motor Induksi 3 Phasa
Berdasarkan Frekwensi, Oleh : Teten Dian Hakim, ..........………….....……122-132
VII. Perencanaan dan Analisa Sistem Pentanahan Pada Pembangkit Listrik
Tenaga Gas 100 MW di Gorontalo, Oleh : Ujang Wiharja …………………133-141
VIII. Analisa Pentanahan Elektroda Batang Pada stop Kontak Untuk Menekan
Biaya Listrik, Oleh : Nurhabibah Naibaho …….……………..…………142-151
IX. Rancang Bangun Rangkaian Pengendali Lampu Jarak Jauh Menggunakan
Bloetooth, Oleh : Vita Nurdinawati ....…………...........……………………152-161
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
RANCANG BANGUN ALAT INJEKSI KAITANNYA TERHADAP PENURUNAN
KAPASITAS TRANSFORMATOR
Oleh : Abdul Kodir Al Bahar1
ABSTRAK Salah satu penyebab gangguan trafo adalah beban yang melebihi kemampuan
transformator. Keadaan overload kontinu akan mempengaruhi umur transformator dan
menghasilkan kapasitas transformator yang berkurang. Kapasitas yang menurun, pebebanan
trafo tidak akan maksimal dan meningkatkan risiko kerusakan. Tindakan yang dilakukan
untuk mencoba penurunan gangguan akibat beban transformator adalah dengan uji
transformator dan diketahui berapa persen penurunan kapasitas transformator. Data dari
pengujian digunakan untuk menghitung penurunan kapasitas transformator. Hasil penelitian
pada transformator yang belum dioperasikan berkaitan dengan keadaan ideal transformator.
Sedangkan untuk penelitian pada trafo kedua menunjukkan bagaimana transformator yang
telah beroperasi selama beberapa tahun telah menurunkan kapasitas transformator. Sehingga
trafo kedua tidak bisa digunakan sampai maksimal.
ABSTRACT One cause the interruption of transformer is loading that exceeds the
capabilities of the transformer. The state of continuous overload will affect the age of the
transformer and result in a reduced capacity of the transformer. The declining capacity,
loading on the transformer will not be maximized and increase the risk of damage. Actions
taken to attempt the decrease disturbances resulting from the transformer loadings are by the
transformer test and known how many percent decrease in capacity of the transformer. The
data from the test is used to calculate the reduction in the capacity of the transformer. Result
of the research on the transformer which is not operated yet relating to the ideal state of a
transformer. As for the research on the second transformer indicates how transformer which
been operating for several years has decreased the capacity of the transformer. So that the
second transformer can not be loaded to the maximum.
Key Words : Supply Electricity, distribution transformers, age, capacity transformers,
interruption .
I. PENDAHULUAN
1.1. Latar Belakang
Meningkatnya taraf kehidupan
masyarakat menyebabkan pemakaian listrik
yang digunakan untuk kehidupan sehari- hari
semakin meningkat. Kebutuhan akan tenaga
listrik dari pelanggan selalu bertambah dari
waktu ke waktu. Untuk itulah diperlukan
suatu pelayanan dan pengoperasian sistem
tenaga listrik yang maksimal serta
memuaskan.
Sistem tenaga listrik merupakan sarana
untuk mengubah, menyalurkan dan
mendistribusikan energi listrik dari pusat
pembangkit tenaga listrik sampai instalasi
rumah tangga.
Sistem tenaga listrik terdiri dari tiga
kelompok yaitu:
1.Stasiun Pembangkit,
2.Saluran Transmisi, dan
3.Sistem Distribusi.
Salah satu peralatan yang sangat penting
yang digunakan pada pembangkit tenaga
listrik adalah Transformator Distribusi.
Fungsi dari Transformator distribusi ini
merupakan transformator penurun tegangan
yaitu dari tegangan menengah menjadi
saluran tegangan rendah untuk melayani
kebutuhan tenaga listrik pada konsumen.
Karena transformator merupakan asset
yang mahal, penggantian transformator untuk
74
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
meningkatkan keandalan sistem secara
ekonomis bukan pilihan yang tepat.
Kerusakan pada transformator menyebabkan
kontinuitas pendistribusian tenaga listrik ke
konsumen akan terganggu atau terjadi
pemadaman. Pemadaman merupakan suatu
kerugian yang menyebabkan penurunan kWh
terjual. Mengingat lamanya waktu pemulihan
gangguan pada transformator maka
diperlukan upaya preventif untuk mencegah
terjadinya kerugian yang besar akibat daya
yang tidak tersalurkan akibat gangguan
transformator. Oleh karena itu, perlu
dilakukan rangkaian pengujian yang
dimaksudkan agar transformator tersebut bisa
bekerja sesuai dengan spesifikasi dan masa
pemakaian maksimumnya pada berbagai
kondisi di lapangan.
Salah satu pengujian yang akan dibahas
adalah pengujian transformator distribusi
dengan teknik rangkaian alat instrumen
sederhana yang dibuat dengan regulator
tegangan sebagai instrumen utama. Maksud
dari pengujian ini adalah untuk mengetahui
penurunan kapasitas sebuah transformator
distribusi, sehingga suatu transformator dapat
beroperasi dengan normal tanpa
menimbulkan gangguan dan kerusakan.
1.2. Rumusan Masalah
Berdasarkan latar belakang diatas, maka
dalam ini akan dibahas beberapa rumusan
masalah, yaitu :
1. Bagaimana cara membuat rangkaian
untuk pengujian transformator ?
2. Seberapa besar penurunan kapasitas
transformator terkait dengan usia
transformator?
3. Bagaimana menghitung penurunan
kapasitas transformator distribusi
berdasarkan pengujian arus dan
tegangan?
1.3. Tujuan Penulisan
Tujuan dari penulisan ini dimaksudkan
untuk :
1. Mengetahui cara kerja pengujian
transformator.
2. Mengetahui penurunan kapasitas sebuah
transformator setelah dilakukan
pengujian.
3. Menjaga keamanan dan keandalan
sistem distribusi tenaga listrik dengan
berdasar pada hasil pengujian.
4. Sebagai acuan untuk pembebanan
transformator distribusi.
1.4. Batasan Masalah
Agar pembahasan ini lebih terarah,
penulis melakukan batasan permasalahan,
yaitu :
1. Membahas cara pengujian transformator
2. Membahas cara membuat rangkaian dan
cara kerja pengujian transformator untuk
mengetahui penurunan kapasitas.
3. Membahas cara membandingkan
penurunan kapasitas pada transformator
baru dan transformator beroperasi.
1.5. Metodologi Penelitian
Untuk memperoleh data-data yang
digunakan, penulis menggunakan beberapa
metode, antara lain sebagai berikut :
1. Metode Kepustakaan
Memperoleh berbagai data / informasi
sesuai ruang lingkup bahasan penulisan
melalui pembacaan buku, makalah, hand
book dan literature.
2. Metode Analisa
Menganalisa rangkaian penyusun pada
proses pengujian, sehingga didapat gambaran
awal pada prinsip kerja pengujian, yang bisa
digunakan sebagai landasan pemahaman
setelah memperoleh teori yang didapat dari
metode kepustakaan.
3. Metode Observasi
Melakukan pengamatan secara langsung
cara kerja dari pengujian setelah kita rangkai
menjadi alat peraga.
II. LANDASAN TEORI
2.1 Transformator
Transformator merupakan peralatan
mesin listrik statis yang bekerja berdasarkan
prinsip induksi elektromagnetik, yang dapat
mentransformasikan energi listrik dari
tegangan tinggi ke tegangan rendah ataupun
sebaliknya, dimana perbandingan tegangan
antara sisi primer dan sisi sekunder
75
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
berbanding lurus dengan perbandingan
jumlah lilitan dan berbanding terbalik dengan
perbandingan arusnya dengan nilai frekuensi
yang sama besar. Pada sistem distribusi,
transformator digunakan untuk menurunkan
tegangan penyaluran 20 kV ke tegangan
pelayanan 400 / 231 Volt.
2.2 Jenis Transformator
Secara umum, terdapat dua jenis
transformator distribusi yang banyak
digunakan pada jaringan distribusi, yaitu :
a) Transformator Konvensional
Transformator konvensional dilengkapi
dengan konservator, yaitu sebuah tabung atau
tangki yang letaknya diatas body
transformator, yang berfungsi untuk
menampung pemuaian minyak saat
transformator berbeban.
b) Transformator Hermetical
Pada sistem ini konservator dan sistem
pipa untuk hubungan dengan atmosfer luar
tidak digunakan lagi. Untuk mengamankan
pemuaian maupun penyusutan minyak,
tangki dibuat fleksibel (hermetic), dimana
kenaikan volume minyak akan ditampung
oleh sirip-sirip yang dapat mengembang dan
mampu menampung semua pemuaian
minyak. Lubang pernapasan sengaja
ditiadakan agar minyak tidak bersentuhan
dengan udara.
2.3 Konstruksi Transformator Konstruksi transformator distribusi
dikelompokkan menjadi beberapa bagian,
yaitu :
a) Bagian utama/aktif
Terdiri dari inti besi, kumparan
transformator, minyak transformator,
bushing dan tangki konservator.
b) Bagian pasif
Terdiri dari sistem pendingin, tap
changer, alat pernapasan (dehydrating
breather), dan alat indicator.
c) Sistem Insulasi
d) Terminal
e) Proteksi gangguan internal
Proteksi dari gangguan internal pada
transformator, seperti hubung singkat di
dalam kumparan dan hubung singkat antara
fase kumparan.
f) Peralatan proteksi
Terdiri dari Rele Bucholz, pengaman
tekanan lebih (explosive membrame/bursting
plate), rele tekanan lebih (sudden pressure
relay), rele pengaman tangki.
g) Peralatan tambahan untuk pengaman
Terdiri dari rele differensial, rele arus
lebih, rele hubung tanah, rele thermis, dan
Lightning Arrester.
2.4 Pengaruh Pembebanan Terhadap
Efisiensi Transformator
Jika transformator kemudian dibebani
terus menerus, maka rugi (losses) akan
mempunyai karakteristik efisiensi penyaluran
daya terhadap pembebanan trafo sebagai
berikut :
Dari kurva diatas, terlihat bahwa
transformator akan mempunyai efisiensi
tertinggi pada saat terjadi pembebanan
sebesar 80 % dari pembebanan nominalnya.
Efisiensi transformator dinyatakan dalam
angka presentase. Pada faktor cos φ = 0,2
efisiensi trafo mencapai sekitar 65%. Pada
beban dengan faktor kerja cos φ = 1,0,
efisiensi trafo bisa mencapai 90%.
2.5 Tegangan Pengenal Transformator
dan Penyadapannya
2.5.1 Tegangan Primer
Tegangan primer ditetapkan sesuai
dengan tegangan nominal sistem pada
jaringan tegangan menengah (JTM) yang
berlaku dilingkungan PLN, 6 kV dan 20 kV.
Pada sistem distribusi tiga fasa empat kawat,
maka transformator fasa tunggal yang
dipasang tentunya mempunyai tegangan
pengenal 20 kV/V3 = 12 kV. Karena SPLN 1
: 1978 menetapkan tegangan nominal sistem
20 kV, maka masih perlu dipasang
transformator fasa tungga dengan tegangan
pengenal 12 kV.
2.5.1 Tegangan Sekunder
Tegangan sekunder ditetapkan tampa
deisesuaikan dengan tegangan nominal
sistem pada jaringan tegangan rendah (JTR)
yang berlaku dilingkungan PLN adalah 127
dan 220 V untuk sistem fasa tunggal dan 127
/ 220 V dan 220 / 380 V untuk sistem fasa
tiga, yaitu : 133 / 231 V dan 231 / 400 V
pada kedaaan tampa beban. Bilamana dipakai
76
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
tidak serentak, maka dengan bertegangan
sekunder 231 / 400 Volt daya transformator
tetap 100 % daya pengenal. Sedang dengan
tegangan sekunder 133 / 231 Volt dayanya
hanya 75 % daya pengenal.
2.6 Impedansi Transformator Impedansi transformator merupakan
total jumlah keseluruhan perlawanan
terhadap arus bolak-balik (AC) di dalam
sebuah peralatan listrik. Nilai impedansi
sebuah transformator umumnya dicantumkan
pada name plat transformator itu sendiri
dalam satuan persen (%), misalnya 3%, 4%,
5%, dan seterusnya. Pengertian nilai tersebut
adalah bahwa drop tegangan yang timbul
karena impedansi adalah sekian persen dari
tegangan yang ditetapkan. Maka drop
tegangan pada transformator tersebut didapat
dengan persamaan :
Vdrop = V x Z (%)…………....(2.1)
Atau untuk menentukan impedansi pada
sebuah transformator dengan berdasarkan
kepada tegangan drop dan tegangan dari
transformator itu sendiri, persamaannya :
Z (%) = ( 𝑉𝑑𝑟𝑜𝑝
𝑉 ) x 100 %.........(2.2)
2.7 Pengujian Pada Transformator
Pengujian yang harus dilakukan pada
sebuah transformator biasanya disesuaikan
dengan kebutuhannya. Beberapa jenis
pengujian pada transformator adalah sebagai
berikut :
a) Pengujian Tahanan Isolasi
Pengujian Tahanan Isolasi biasanya
dilaksanakan pada awal pengujian dengan
tujuan untuk mengetahui secara dini kondisi
isolasi transformator dan untuk menghindari
kegagalan yang bisa berakibat fatal, sebelum
pengujian selanjutnya dilakukan. Pengujian
dilakukan dengan menggunakan alat uji
tahanan isolasi Megger.
b) Pengujian Tahanan Kumparan
Pengujian dilakukan dengan cara
melakukan pengukuran tahanan kumparan
transformator. Data hasil pengujian
digunakan untuk menghitung besarnya rugi
tembaga pada transformator tersebut.
c) Pengujian Karakteristik Beban Nol
Pengujian Karakteristik Beban Nol atau
Tanpa Beban dilakukan untuk mengetahui
besarnya kerugian daya yang disebabkan
oleh rugi hysterisis dan eddy current pada
inti transformator dan besarnya arus yang
pada daya tersebut. Pengukuran dilakukan
dengan memberikan tegangan nominal pada
salah satu sisi transformator dan sisi lainnya
dibiarkan dalam keaadaan tanpa beban.
d) Pengujian Karakteristik Hubung Singkat
Pengujian dilakukan dengan cara
memberikan arus nominal pada salah satu
sisi transformator dan sisi yang lain dihubung
singkat, dengan demikian akan dibangkitkan
juga arus nominal pada sisi yang di hubung
singkat. Adapun tujuan dari pengujian ini
adalah untuk mengetahui besarnya rugi daya
yang hilang akibat dari tembaga dari
transformator saat beroperasi.
III. PERANCANGAN
3.1 Alat dan Bahan Pada proses persiapan perancangan
harus didukung dengan peralatan dan bahan
yang lengkap dan standar agar memudahkan
pada waktu pelaksanaan perakitan. Alat-alat
dan bahan akan diuraikan sebagai berikut :
a) Regulator Tegangan
Regulator tegangan adalah bagian utama
alat uji ini. Regulator tegangan tiga fasa
dengan menghasilkan tegangan 380 Volt
ditujukan untuk injeksi ke transformator
yang dijadikan objek pengujian.
b) Transformator Step-Up
Transformator step up digunakan untuk
menaikan tegangan injeksi ke transformator
yang diuji. Penggunaan transformator step up
dimaksudkan untuk mendapatkan nilai
tegangan sampai dengan 800 Volt.
Transformator step up 800 volt digunakan
karena menyesuaikan dengan angka persen
impedansi pada transformator. Dimana angka
tersebut berarti besar tegangan drop yang
timbul karena impedansi tersebut seperti
yang telah dijelaskan pada bab sebelumnya.
Pada transformator yang diuji, angka
persen impedansi terdapat pada name plat.
Pada pengujian kali ini akan menggunakan
transformator dengan impedansi sebesar 4
(empat) persen. Jadi, pemilihan transformator
step up 800 volt berdasarkan persamaan yang
telah ditulis pada Bab sebelumnya, yaitu
pada (persamaan 2.1).
77
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
V drop = V x Z
V drop = 20000 Volt x 4 %
= 800 Volt
c) Volt Ampere Meter
Volt Ampere meter adalah alat yang
digunakan untuk mengukur kuat arus dan
tegangan listrik pada satu device sekaligus.
Volt Ampere meter adalah alat ukur yang
mengkombinasikan volt meter dan ampere
meter. Volt Ampere meter yang digunakan
pada alat ini adalah jenis digital untuk
pengukuran satu fasa.
d) Kabel Penghubung
Pada pengujian ini akan dipakai kabel
NYAF yang berfungsi sebagai penghubung
antara transformator (objek pengujian) dan
regulator tegangan serta komponen lainnya
sehingga dapat dilewati sumber tegangan.
e) MCB
Pada pengujian ini MCB digunakan
sebagai pengaman hubung singkat atau
pengaman alat utama. MCB dipasang sebagai
pengaman sumber utama dari PLN dan
sebagai pengaman untuk regulator tegangan.
f) Selector Switch
Selector Switch digunakan pada saat
pengujian untuk mendapatkan nilai volt dan
ampere pada tiap fasa yang tertera pada volt
ampere meter yang dipasang, karena pada
alat ini digunakan volt ampere meter untuk
pengukuran masing-masing fasa.
g) CT
CT digunakan agar pada saat pengujian
dapat membaca arus yang diukur pada sisi
sekunder transformator yang diuji. Pada
pengujian ini digunakan CT 1000/5 Ampere.
Pemilihan CT 1000/5 berdasarkan pada
kapasitas transformator yang diuji.
h) Box Panel dari plat besi
Box panel digunakan sebagai wadah
untuk memasang semua alat-alat dan
komponen diatas agar terpasang rapi dan
aman digunakan pada saat proses pengujian.
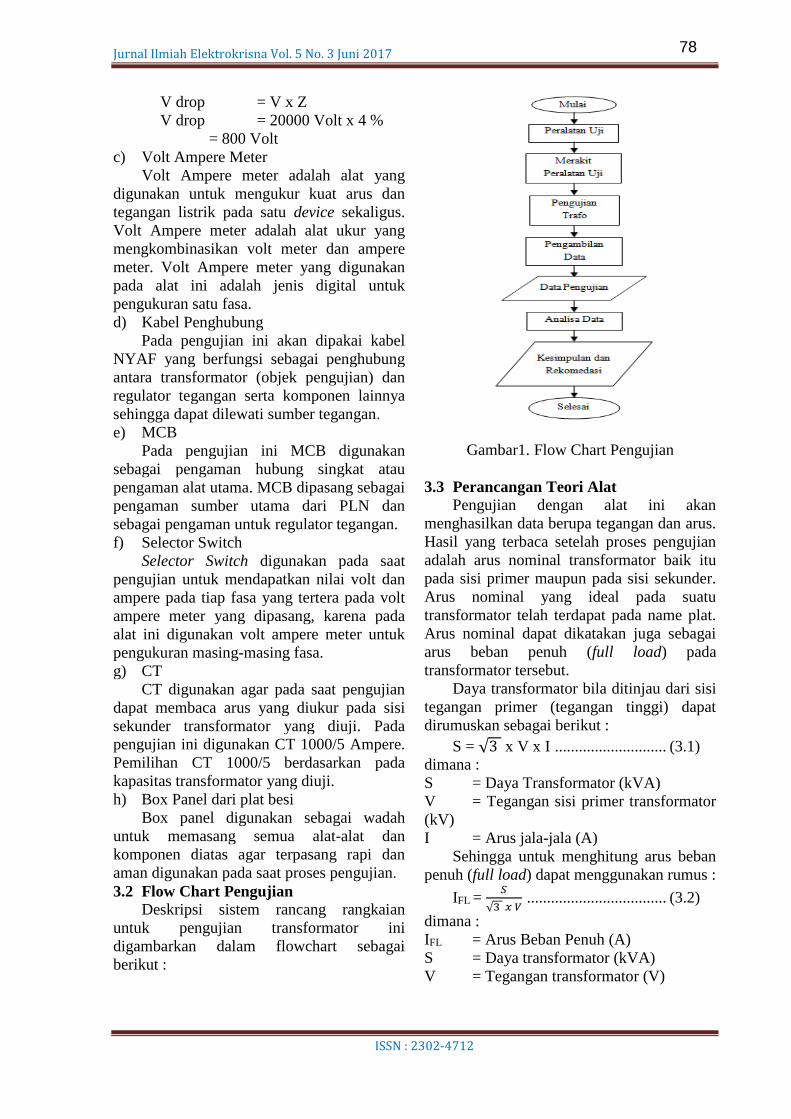
3.2 Flow Chart Pengujian Deskripsi sistem rancang rangkaian
untuk pengujian transformator ini
digambarkan dalam flowchart sebagai
berikut :
Gambar1. Flow Chart Pengujian
3.3 Perancangan Teori Alat Pengujian dengan alat ini akan
menghasilkan data berupa tegangan dan arus.
Hasil yang terbaca setelah proses pengujian
adalah arus nominal transformator baik itu
pada sisi primer maupun pada sisi sekunder.
Arus nominal yang ideal pada suatu
transformator telah terdapat pada name plat.
Arus nominal dapat dikatakan juga sebagai
arus beban penuh (full load) pada
transformator tersebut.
Daya transformator bila ditinjau dari sisi
tegangan primer (tegangan tinggi) dapat
dirumuskan sebagai berikut :
S = √3 x V x I ............................ (3.1)
dimana :
S = Daya Transformator (kVA)
V = Tegangan sisi primer transformator
(kV)
I = Arus jala-jala (A)
Sehingga untuk menghitung arus beban
penuh (full load) dapat menggunakan rumus :
IFL = 𝑆
√3 𝑥 𝑉 ................................... (3.2)
dimana :
IFL = Arus Beban Penuh (A)
S = Daya transformator (kVA)
V = Tegangan transformator (V)
78
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
3.4 Cara Kerja Alat Tegangan yang dihasilkan oleh regulator
tegangan dengan minimal 380 volt
tigafasakemudian dinaikkan kembali oleh
transformator step up menjadi 800 volt yang
di injeksi ke transformator pada kumparan
primer. Kemudian pada kumparan sekunder
dibuat rangkaian tertutup (loop) dengan
memasang CT. Hal ini dimaksudkan supaya
pengukuran di sisi sekunder dapat dilakukan
dan menghasilkan hasil ukur berupa arus
nominal transformator di sisi tegangan
rendah.
Dengan terpasangnya alat ukur volt
ampere meter pada alat, akan menunjukkan
angka hasil ukur berupa tegangan dan arus
pada sisi primer dan sekunder transformator.
Angka hasil ukur ini kemudian dibuat
perhitungan untuk mengetahui berapa persen
penurunan kapasitas dan maksimal
pembebanan yang dapat ditampung oleh
transformator tersebut.
3.5 Blok Diagram Pengujian Blok diagram dari rangkaian pengujian
transformator ini adalah sebagai berikut :
Gambar 2. Blok Diagram Pengujian
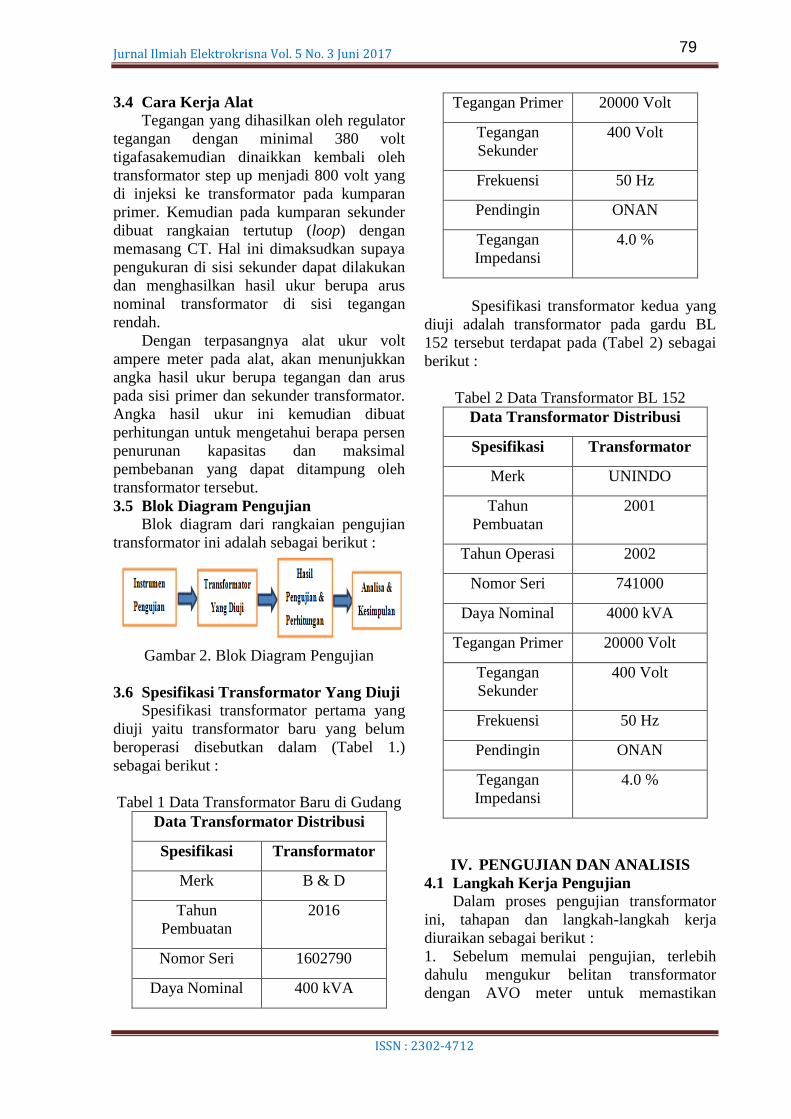
3.6 Spesifikasi Transformator Yang Diuji Spesifikasi transformator pertama yang
diuji yaitu transformator baru yang belum
beroperasi disebutkan dalam (Tabel 1.)
sebagai berikut :
Tabel 1 Data Transformator Baru di Gudang
Data Transformator Distribusi
Spesifikasi Transformator
Merk B & D
Tahun
Pembuatan
2016
Nomor Seri 1602790
Daya Nominal 400 kVA
Tegangan Primer 20000 Volt
Tegangan
Sekunder
400 Volt
Frekuensi 50 Hz
Pendingin ONAN
Tegangan
Impedansi
4.0 %
Spesifikasi transformator kedua yang
diuji adalah transformator pada gardu BL
152 tersebut terdapat pada (Tabel 2) sebagai
berikut :
Tabel 2 Data Transformator BL 152
Data Transformator Distribusi
Spesifikasi Transformator
Merk UNINDO
Tahun
Pembuatan
2001
Tahun Operasi 2002
Nomor Seri 741000
Daya Nominal 4000 kVA
Tegangan Primer 20000 Volt
Tegangan
Sekunder
400 Volt
Frekuensi 50 Hz
Pendingin ONAN
Tegangan
Impedansi
4.0 %
IV. PENGUJIAN DAN ANALISIS
4.1 Langkah Kerja Pengujian
Dalam proses pengujian transformator
ini, tahapan dan langkah-langkah kerja
diuraikan sebagai berikut :
1. Sebelum memulai pengujian, terlebih
dahulu mengukur belitan transformator
dengan AVO meter untuk memastikan
79
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
transformator dalam kondisi belitan yang
masih baik atau tidak putus.
2. Memeriksa posisi tap changer dengan
skala 20000 Volt / 400 Volt
3. Mendata transformator dengan melihat
name plat transformator dan memperhatikan
kapasitas, beban, dan impedansi
transformator.
4. Merangkai semua komponen, alat ukur,
dan objek pengujian dengan kabel
penghubung. Beberapa rangkaiannya adalah
sebagai berikut :
a) Regulator tegangan terhubung ke
sumber tegangan dan transformator step
up dilengkapi dengan MCB sebagai
pengaman.
b) Rangkaian dari regulator tegangan ke
alat ukur berupa volt ampere meter
untuk menghidupkan display.
c) Transformator step up terhubung ke
objek pengujian pada sisi primer
transformator.
5. Pada sisi sekunder transformator, dibuat
rangkaian tertutup (loop) dengan men-jumper
antar fasa termasuk netral.
6. Memasang CT pada sisi sekunder
transformator dan hubungkan dengan volt
ampere meter untuk menghasilkan angka
pengukuran.
7. Memastikan semua komponen terangkai
dengan baik dan aman diberi tegangan.
8. Memulai injeksi tegangan dari regulator
secara bertahap sambil memperhatikan volt
ampere meter.
9. Catat hasil pengukuran tegangan dan
arusnya.
10. Selesai.
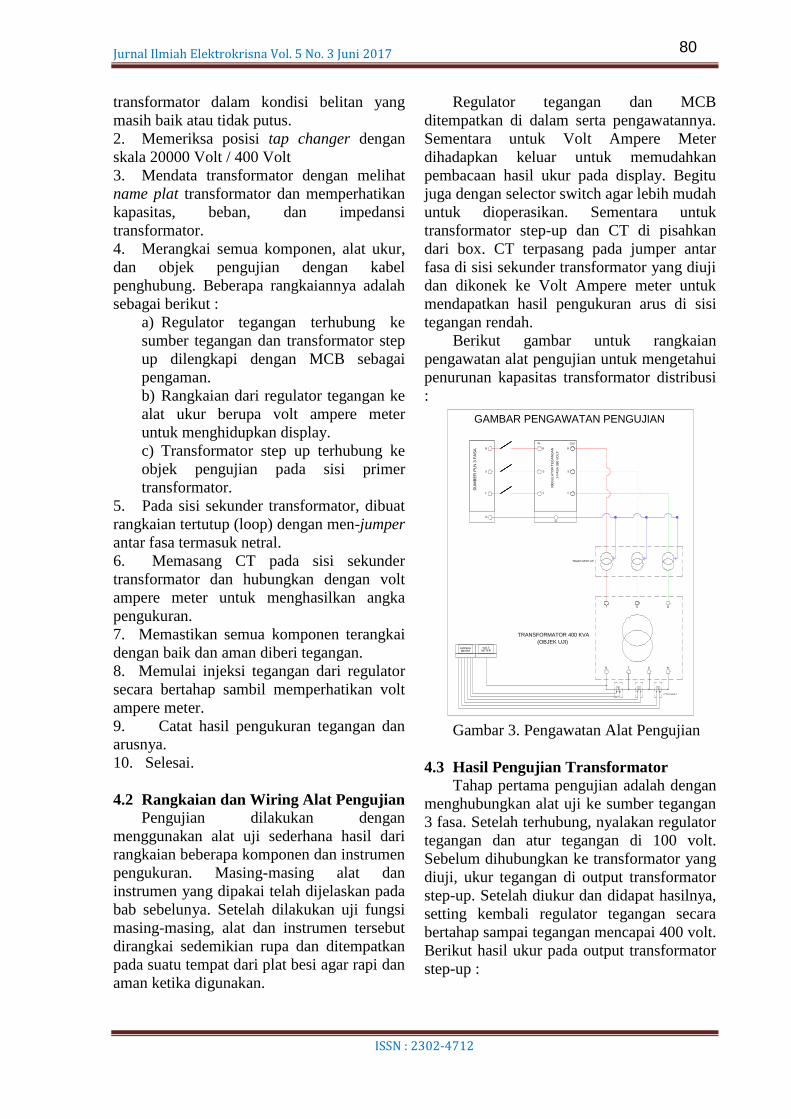
4.2 Rangkaian dan Wiring Alat Pengujian
Pengujian dilakukan dengan
menggunakan alat uji sederhana hasil dari
rangkaian beberapa komponen dan instrumen
pengukuran. Masing-masing alat dan
instrumen yang dipakai telah dijelaskan pada
bab sebelunya. Setelah dilakukan uji fungsi
masing-masing, alat dan instrumen tersebut
dirangkai sedemikian rupa dan ditempatkan
pada suatu tempat dari plat besi agar rapi dan
aman ketika digunakan.
Regulator tegangan dan MCB
ditempatkan di dalam serta pengawatannya.
Sementara untuk Volt Ampere Meter
dihadapkan keluar untuk memudahkan
pembacaan hasil ukur pada display. Begitu
juga dengan selector switch agar lebih mudah
untuk dioperasikan. Sementara untuk
transformator step-up dan CT di pisahkan
dari box. CT terpasang pada jumper antar
fasa di sisi sekunder transformator yang diuji
dan dikonek ke Volt Ampere meter untuk
mendapatkan hasil pengukuran arus di sisi
tegangan rendah.
Berikut gambar untuk rangkaian
pengawatan alat pengujian untuk mengetahui
penurunan kapasitas transformator distribusi
:
Gambar 3. Pengawatan Alat Pengujian
4.3 Hasil Pengujian Transformator
Tahap pertama pengujian adalah dengan
menghubungkan alat uji ke sumber tegangan
3 fasa. Setelah terhubung, nyalakan regulator
tegangan dan atur tegangan di 100 volt.
Sebelum dihubungkan ke transformator yang
diuji, ukur tegangan di output transformator
step-up. Setelah diukur dan didapat hasilnya,
setting kembali regulator tegangan secara
bertahap sampai tegangan mencapai 400 volt.
Berikut hasil ukur pada output transformator
step-up :
SU
MB
ER
PL
N 3
FA
SA
RE
GU
LA
TO
R T
EG
AN
GA
N
3 F
AS
A 3
80
VO
LT
IN OUT
N
R
S
T
N
TRAFO STEP-UP
R
S
T
R
S
T
RST
RST
N
AMPEREMETER
VOLTMETER
GAMBAR PENGAWATAN PENGUJIAN
CT TR 1000/5 A
TRANSFORMATOR 400 KVA
(OBJEK UJI)
80
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
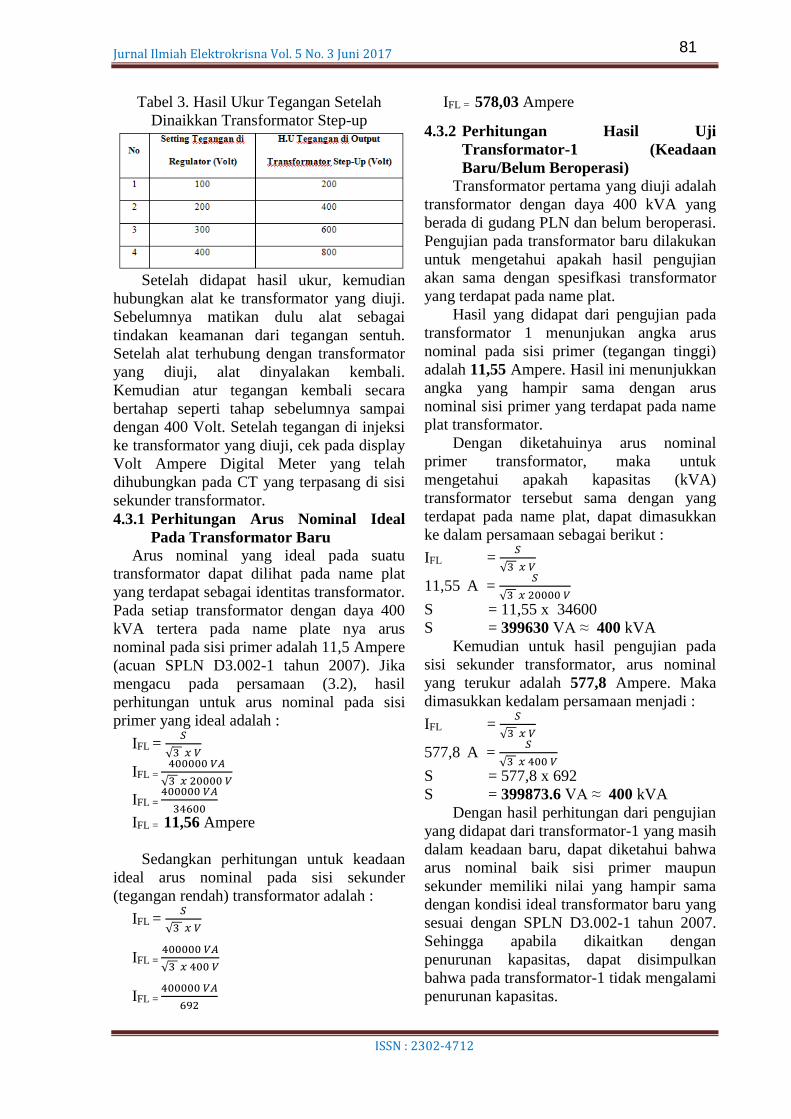
Tabel 3. Hasil Ukur Tegangan Setelah
Dinaikkan Transformator Step-up
Setelah didapat hasil ukur, kemudian
hubungkan alat ke transformator yang diuji.
Sebelumnya matikan dulu alat sebagai
tindakan keamanan dari tegangan sentuh.
Setelah alat terhubung dengan transformator
yang diuji, alat dinyalakan kembali.
Kemudian atur tegangan kembali secara
bertahap seperti tahap sebelumnya sampai
dengan 400 Volt. Setelah tegangan di injeksi
ke transformator yang diuji, cek pada display
Volt Ampere Digital Meter yang telah
dihubungkan pada CT yang terpasang di sisi
sekunder transformator.
4.3.1 Perhitungan Arus Nominal Ideal
Pada Transformator Baru
Arus nominal yang ideal pada suatu
transformator dapat dilihat pada name plat
yang terdapat sebagai identitas transformator.
Pada setiap transformator dengan daya 400
kVA tertera pada name plate nya arus
nominal pada sisi primer adalah 11,5 Ampere
(acuan SPLN D3.002-1 tahun 2007). Jika
mengacu pada persamaan (3.2), hasil
perhitungan untuk arus nominal pada sisi
primer yang ideal adalah :
IFL = 𝑆
√3 𝑥 𝑉
IFL = 400000 𝑉𝐴
√3 𝑥 20000 𝑉
IFL = 400000 𝑉𝐴
34600
IFL = 11,56 Ampere
Sedangkan perhitungan untuk keadaan
ideal arus nominal pada sisi sekunder
(tegangan rendah) transformator adalah :
IFL = 𝑆
√3 𝑥 𝑉
IFL = 400000 𝑉𝐴
√3 𝑥 400 𝑉
IFL = 400000 𝑉𝐴
692
IFL = 578,03 Ampere
4.3.2 Perhitungan Hasil Uji
Transformator-1 (Keadaan
Baru/Belum Beroperasi)
Transformator pertama yang diuji adalah
transformator dengan daya 400 kVA yang
berada di gudang PLN dan belum beroperasi.
Pengujian pada transformator baru dilakukan
untuk mengetahui apakah hasil pengujian
akan sama dengan spesifkasi transformator
yang terdapat pada name plat.
Hasil yang didapat dari pengujian pada
transformator 1 menunjukan angka arus
nominal pada sisi primer (tegangan tinggi)
adalah 11,55 Ampere. Hasil ini menunjukkan
angka yang hampir sama dengan arus
nominal sisi primer yang terdapat pada name
plat transformator.
Dengan diketahuinya arus nominal
primer transformator, maka untuk
mengetahui apakah kapasitas (kVA)
transformator tersebut sama dengan yang
terdapat pada name plat, dapat dimasukkan
ke dalam persamaan sebagai berikut :
IFL = 𝑆
√3 𝑥 𝑉
11,55 A = 𝑆
√3 𝑥 20000 𝑉
S = 11,55 x 34600
S = 399630 VA ≈ 400 kVA
Kemudian untuk hasil pengujian pada
sisi sekunder transformator, arus nominal
yang terukur adalah 577,8 Ampere. Maka
dimasukkan kedalam persamaan menjadi :
IFL = 𝑆
√3 𝑥 𝑉
577,8 A = 𝑆
√3 𝑥 400 𝑉
S = 577,8 x 692
S = 399873.6 VA ≈ 400 kVA
Dengan hasil perhitungan dari pengujian
yang didapat dari transformator-1 yang masih
dalam keadaan baru, dapat diketahui bahwa
arus nominal baik sisi primer maupun
sekunder memiliki nilai yang hampir sama
dengan kondisi ideal transformator baru yang
sesuai dengan SPLN D3.002-1 tahun 2007.
Sehingga apabila dikaitkan dengan
penurunan kapasitas, dapat disimpulkan
bahwa pada transformator-1 tidak mengalami
penurunan kapasitas.
81
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
4.3.3 Perhitungan Hasil Uji
Transformator-2 (Keadaan Telah
Beroperasi)
Transformator kedua yang diuji adalah
transformator dengan daya 400 kVA yang
berada di gardu BL 152 dan telah beroperasi
sejak tahun 2002. Pengujian pada
transformator yang telah beroperasi
dilakukan untuk mengetahui penurunan
kapasitas pada transformator.
Hasil yang didapat dari pengujian pada
transformator-2 menunjukan angka arus
nominal pada sisi primer (tegangan tinggi)
adalah 7,62 Ampere. Hasil ini menunjukkan
angka yang berbeda dengan arus nominal sisi
primer yang terdapat pada name plat
transformator.
Dengan diketahuinya arus nominal
primer transformator-2, maka untuk
mengetahui berapa sisa kVA transformator
tersebut dapat dimasukkan ke dalam
persamaan sebagai berikut :
IFL = 𝑆
√3 𝑥 𝑉
7,62 A = 𝑆
√3 𝑥 20000 𝑉
S = 7,62 x 34600
S = 263652 VA ≈ 263,6 kVA
Kemudian untuk hasil pengujian pada
sisi sekunder transformator, arus nominal
yang terukur adalah 381,5 Ampere. Maka
dimasukkan kedalam persamaan menjadi :
IFL = 𝑆
√3 𝑥 𝑉
381,5 A = 𝑆
√3 𝑥 400 𝑉
S = 381,5 x 692
S = 263998 VA ≈ 263,9 kVA
Dengan hasil perhitungan dari pengujian
yang didapat dari transformator-2, dapat
diketahui bahwa arus nominal baik sisi
primer maupun sekunder memiliki nilai
sudah jauh berbedaa atau sudah menurun
kapasitasnya jika dibandingkan dengan
kondisi ideal transformator baru.
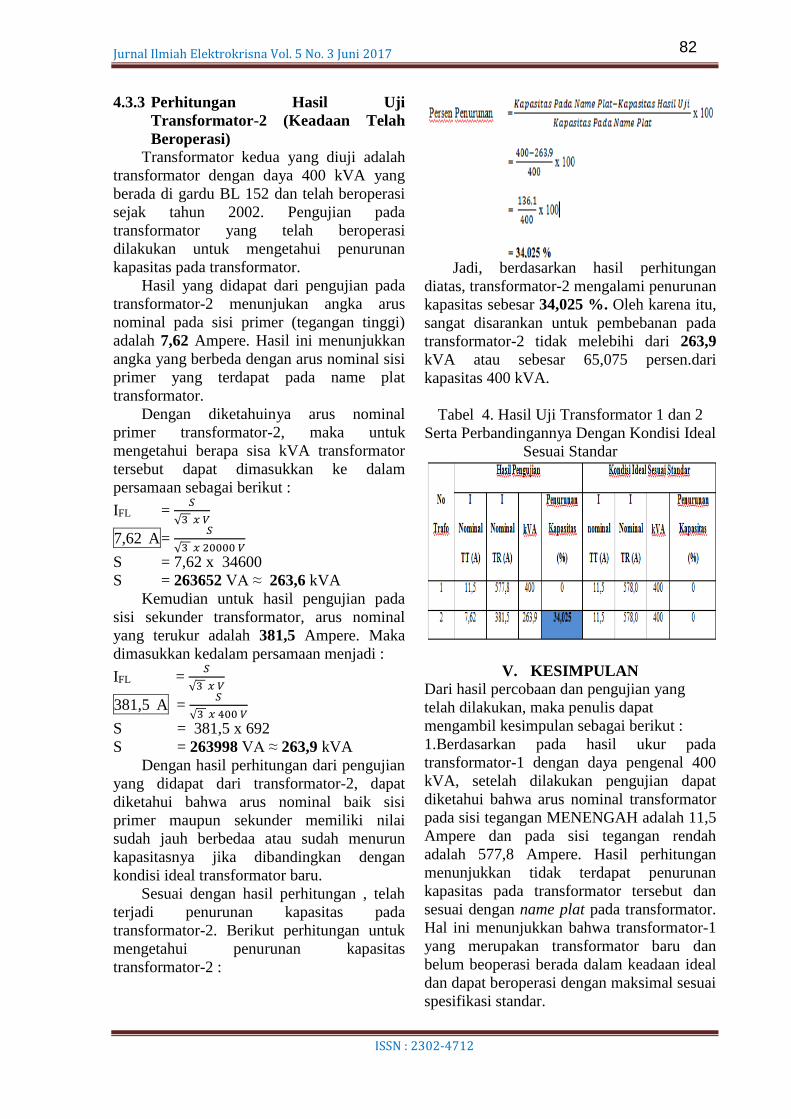
Sesuai dengan hasil perhitungan , telah
terjadi penurunan kapasitas pada
transformator-2. Berikut perhitungan untuk
mengetahui penurunan kapasitas
transformator-2 :
Jadi, berdasarkan hasil perhitungan
diatas, transformator-2 mengalami penurunan
kapasitas sebesar 34,025 %. Oleh karena itu,
sangat disarankan untuk pembebanan pada
transformator-2 tidak melebihi dari 263,9
kVA atau sebesar 65,075 persen.dari
kapasitas 400 kVA.
Tabel 4. Hasil Uji Transformator 1 dan 2
Serta Perbandingannya Dengan Kondisi Ideal
Sesuai Standar
V. KESIMPULAN
Dari hasil percobaan dan pengujian yang
telah dilakukan, maka penulis dapat
mengambil kesimpulan sebagai berikut :
1.Berdasarkan pada hasil ukur pada
transformator-1 dengan daya pengenal 400
kVA, setelah dilakukan pengujian dapat
diketahui bahwa arus nominal transformator
pada sisi tegangan MENENGAH adalah 11,5
Ampere dan pada sisi tegangan rendah
adalah 577,8 Ampere. Hasil perhitungan
menunjukkan tidak terdapat penurunan
kapasitas pada transformator tersebut dan
sesuai dengan name plat pada transformator.
Hal ini menunjukkan bahwa transformator-1
yang merupakan transformator baru dan
belum beoperasi berada dalam keadaan ideal
dan dapat beroperasi dengan maksimal sesuai
spesifikasi standar.
82

Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
2.Berdasarkan pada hasil ukur pada
transformator-2 dengan daya pengenal 400
kVA, setelah dilakukan pengujian dapat
diketahui bahwa arus nominal transformator
pada sisi tegangan menengah adalah 7,62
Ampere dan pada sisi tegangan rendah
adalah 381,5 Ampere. Hasil perhitungan
menunjukkan terdapat penurunan kapasitas
pada transformator tersebut sebesar 34,025
persen dan kapasitas asalnya 400 kVA. Hal
ini menunjukkan bahwa transformator 2
dalam keadaan tidak ideal dan dapat hanya
dapat beroperasi dengan maksimal
pembebanan sebesar 65,075 persen.
3. Hasil pengujian ini dapat dijadikan acuan
untuk menentukan batas persen pembebanan
yang dapat ditampung oleh transformator
tersebut. Hal ini dapat mengurangi
transformator rusak akibat pembebanan yang
tidak terkontrol dan melebihi batas
kemampuan transformator.
4. Dengan dapat terkontrolnya pembebanan
pada transformator beroperasi, keandalan
jaringan dapat terjaga dan pasokan listrik
kepada konsumen juga terjamin.
DAFTAR PUSTAKA
1. Kadir, Abdul. 1979. Transformator.
Jakarta : Pradnya Paramitha.
2. Prayoga, Aditya. 2010. Teknik Tenaga
Listrik Transformer. Universitas
Indonesia.
3. Zuhal. 1995. Dasar Teknik Tenaga
Listrik dan Elektronika Daya. Jakarta :
Gramedia.
4. Sulasno, Ir. 2010. Distribusi Tenaga
Listrik. Semarang : Badan Penerbit
UNDIP.
5. Sumardjati, Prih. 2008. Teknik
Pemanfaatan Tenaga Listrik Jilid 3.
Jakarta : Direktorat Pembinaan Sekolah
Menengah Kejuruan Departemen
Pendidikan Nasional.
6. Manajemen Aset Transformator
Distribusi Jawa Bali. 2010. Jakarta : PT
PLN (Persero) Kantor Pusat
7. Standar PLN No : 17 dan 17A. 1979
tentang Pedoman Pembebanan
Transformator Terendam Minyak.
Jakarta : PT PLN (Persero) Kantor Pusat.
83

Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
MODIFIKASI PENGKABELAN PADA KONTROL KIPAS PENDINGIN UDARA
PADA PLTU BANTEN 3 LONTAR
Oleh : Ahmad Rofi’i1
Abstrak - Pembangkit Listrik Tenaga Uap (PLTU) Banten 3 Lontar merupakan
pembangkit listrik dengan bahan bakar utama batubara. Batubara digiling menggunakan
mill dan didorong dengan udara primari menuju ruang bakar pada boiler. Dimana untuk
tiap-tiap corner pada boiler terdapat peralatan pendeteksi api yang berfungsi untuk
mendeteksi apakah batubara yang didorong menuju boiler terbakar atau tidak. Kipas udara
pendingin atau Cooling Air Fan (CAF) merupakan sistem pendingin peralatan-peralatan
pada area boiler terutama pendeteksi api. CAF termasuk peralatan vital dalam pembangkit
oleh karena itu CAF termasuk kondisi yang dapat menyebabkan Main Fuel Trip (MFT). Di
UJP Lontar masih terdapat kekurangan pada pengkabelan kontrol CAF yang telah
menyebabkan trip unit, diantaranya adalah hanya terdapat 1 breaker kontrol untuk 2
kontrol motor CAF, hal ini dapat menggagalkan proses interlock start ketika breaker
bermasalah. Selain itu juga tidak terdapat interlock start pada posisi lokal dan juga
perubahan dari posisi remote dan lokal dapat menyebabkan trip CAF. Dan satu
permasalahan lagi yaitu belum sempurnanya logic untuk interlock start CAF pada DCS
PLTU lontar. Oleh sebab itu perlu dilakukan modifikasi pengkabelan kontrol CAF
sehingga hal-hal tersebut dapat dicegah.
Abstract - Steam Power (power plant) Banten 3 Lontar a power plant with a primary fuel
coal. Coal is milled using a mill and driven by primary air to the combustion chamber of
the boiler. Where to every corner of the boiler there is a functioning fire detection
equipment to detect whether coal burning boiler which is driven towards or not. Cooling
Air Fan (CAF) is a cooling system equipment in the boiler area especially fire detection.
CAF including vital equipment in the plant therefore CAF includes conditions that can
cause the Main Fuel Trip (MFT). In UJP Lontar there are still shortcomings in the control
wiring CAF that has caused the trip unit, of which there is only 1 to 2 breaker control
motor control CAF, it can frustrate the process interlock start when the breaker is
problematic. In addition, there is no interlock start at the local position and also the
change of the position of the remote and local may cause CAF trip. And one more problem
that is incomplete logic for interlock start CAF start at DCS power plant Lontar. Therefore
it is necessary to modify the control wiring CAF so that these things can be prevented.
Keywords : CAF, Control, DCS and Flame Detector.
84
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
I. PENDAHULUAN
1.1. Latar Belakang
Sistem Kipas udara pendingin
pendeteksi api memiliki peranan penting
dalam pengoperasian boiler pada
pembangkit. Kipas udara pendingin
adalah kipas yang berfungsi untuk untuk
mendinginkan peralatan pendeteksi api
yang berfungsi untuk mendeteksi adanya
nyala api pada ruang bakar boiler.
Pendeteksi api ini sangatlah penting pada
runag bakar boiler sebagai proteksi
kemungkinan adanya ledakan di boiler
karena adanya penumpukan bahan bakar
pada oil gun, dan ketika oil gun
dinyalakan maka kemungkinan adanya
ledakan pada ruang bakar boiler dapat
terjadi, oleh karena itu peralatan ini harus
terjaga dengan baik.
Pendinginan ini dilakukan dengan
cara mengambil udara bebas oleh kipas
yang digerakkan oleh motor ( masing –
masing unit terdapat 2 buah kipas udara
pendingin) dengan tekanan normal pada
pipa kipas udara pendingin lebih besar
dari 5.5 Kpa (normal sekitar 6.6 Kpa) dan
pada tekanan kurang dari 5.5 Kpa motor
yang statusnya siap akan nyala untuk
membantu mensuplai tekanan pada pipa
kipas udara pendingin, dan memberikan
sinyal trip pada unit jika tekanan suplai
kipas udara pendingin kurang dari 3.5
Kpa.
Sistem kontrol kipas udara
pendingin yang ada sekarang ini kurang
handal, dikarenakan power suplai untuk
semua kontrol kipas udara pendingin
dilokal menggunakan satu Mini Circuit
Breaker (MCB). Satu MCB membackup
semua power suplai kontrol baik Motor
A, Motor B dan Pressure switch
instrument. Jadi saat terjadi gangguan
hubung singkat maka MCB kontrol akan
trip sehingga kipas udara pendingin A
dan B akan mati dan dapat menyebabkan
alarm ‘pendingin pendeteksi api hilang’
dan mengakibatkan boiler trip. Selain itu
juga tidak terdapat sistem interlock start
pada posisi lokal dan juga perubahan dari
posisi remote ke lokal atau sebaliknya
dapat menyebabkan trip kipas udara
pendingin. Salah satu permasalahannya
lagi yaitu saat mode start remote dari
Distributed Control System (DCS)
Invensys Foxboro, dimana pada DCS
untuk logic interlock start kipas udara
pendingin belum sempurna.
Untuk mengantisipasi terjadinya
gangguan dan untuk meningkatkan
kehandalan kipas udara pendingin
pendeteksi api pada PLTU Banten 3
Lontar, maka dilakukanlah modifikasi
kontrol pengkabelan kipas udara
pendingin yaitu dengan modifikasi
pemisahan power suplai kontrol kipas
udara pendingin A & B pendeteksi api,
penambahan sistem interlock start secara
lokal dan penyempurnaan logic diagram
pada DCS PLTU UJP Banten 3 Lontar
unit 1,2 dan 3.
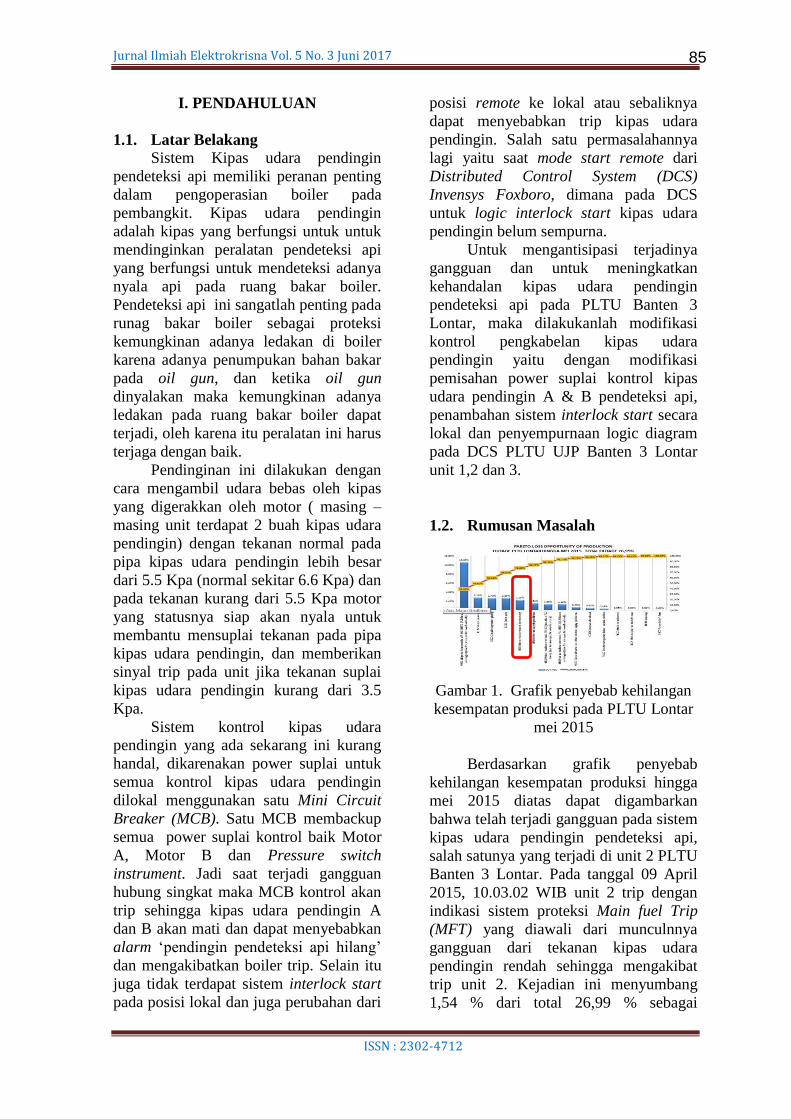
1.2. Rumusan Masalah
Gambar 1. Grafik penyebab kehilangan
kesempatan produksi pada PLTU Lontar
mei 2015
Berdasarkan grafik penyebab
kehilangan kesempatan produksi hingga
mei 2015 diatas dapat digambarkan
bahwa telah terjadi gangguan pada sistem
kipas udara pendingin pendeteksi api,
salah satunya yang terjadi di unit 2 PLTU
Banten 3 Lontar. Pada tanggal 09 April
2015, 10.03.02 WIB unit 2 trip dengan
indikasi sistem proteksi Main fuel Trip
(MFT) yang diawali dari munculnnya
gangguan dari tekanan kipas udara
pendingin rendah sehingga mengakibat
trip unit 2. Kejadian ini menyumbang
1,54 % dari total 26,99 % sebagai
85
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
penyebab kehilangan kesempatan
produksi PLTU Banten 3 Lontar.
Selain itu pada tanggal 14 Mei
2015,waktu 20:12 WIB telah terjadi
gangguan yaitu indikasi ‘udara pendingin
hilang’ yang diawali dari munculnnya
gangguan dari tekanan kipas udara
pendingin rendah sehingga
mengakibatkan trip unit 3.
1.3. Tujuan Penelitian
1. Meningkatkan kehandalan peralatan
kipas udara pendingin pendeteksi api
pada PLTU Banten 3 Lontar
2. Mencegah kerugian yang sangat
besar dengan mengurangi kegagalan
fungsi peralatan kipas udara
pendingin pendeteksi api akibat
gangguan power suplai kontrol yang
mengakibatkan trip unit.
3. Menghindari sejauh mungkin dari
peringkat teratas sebagai penyebab
kehilangan kesempatan produksi
pada PLTU Banten 3 Lontar.
2.1. Trip
Trip adalah kondisi dimana
terjadinya sistem off atau mati secara
tiba-tiba. Trip biasanya terjadi karena
kegagalan fungsi pada peralatan-
peralatan yang berfungsi sebagai proteksi
suatu peralatan utama. Misal pada
peralatan utama kipas udara pendingin
yang memiliki peralatan proteksi berupa
pressure switch. Ketika pressure switch
ngontak (sesuai settingan) akibat dari
perubahan tekanan pada pipa kipas udara
pendingin, maka secara langsung kipas
udara pendingin tersebut akan trip atau
mati secara tiba-tiba.
2.2. Boiler
Boiler yang secara fungsinya
disebut juga sebagai steam generator
(penghasil uap), adalah suatu bentuk
sistem pembakaran yang merupakan
gabungan dari beberapa tube, header,
ducting, burner, fin plate dan manifold
yang di desain untuk saling terhubung
dalam suatu proses untuk mengubah air
menjadi uap bertekanan yang kemudian
digunakan untuk menggerakkan turbin
dan generator sehingga menghasilkan
listrik di sebuah power plant (pembangkit
listrik).
2.3. Flame Detector (Pendeteksi Api)
Flame detector merupakan sebuah
alat pendeteksi api yang menggunakan
sensor optic untuk mendeteksinya. Di sini
ditegaskan bahwa pendeteksi api
digunakan untuk mendeteksi keberadaan
api, bukan panas. Prinsip kerja pendeteksi
api adalah dimulai dari bahwa api akan
bisa dideteksi oleh keberadaan spectrum
cahaya infrared maupun ultraviolet, dan
dari situ semacam microprocessor dalam
pendeteksi api akan bekerja untuk
membedakan spectrum cahaya yang
terdapat pada api yang terdeteksi
tersebut.
Gambar 1. Pendeteksi api dan modul
pendeteksi api
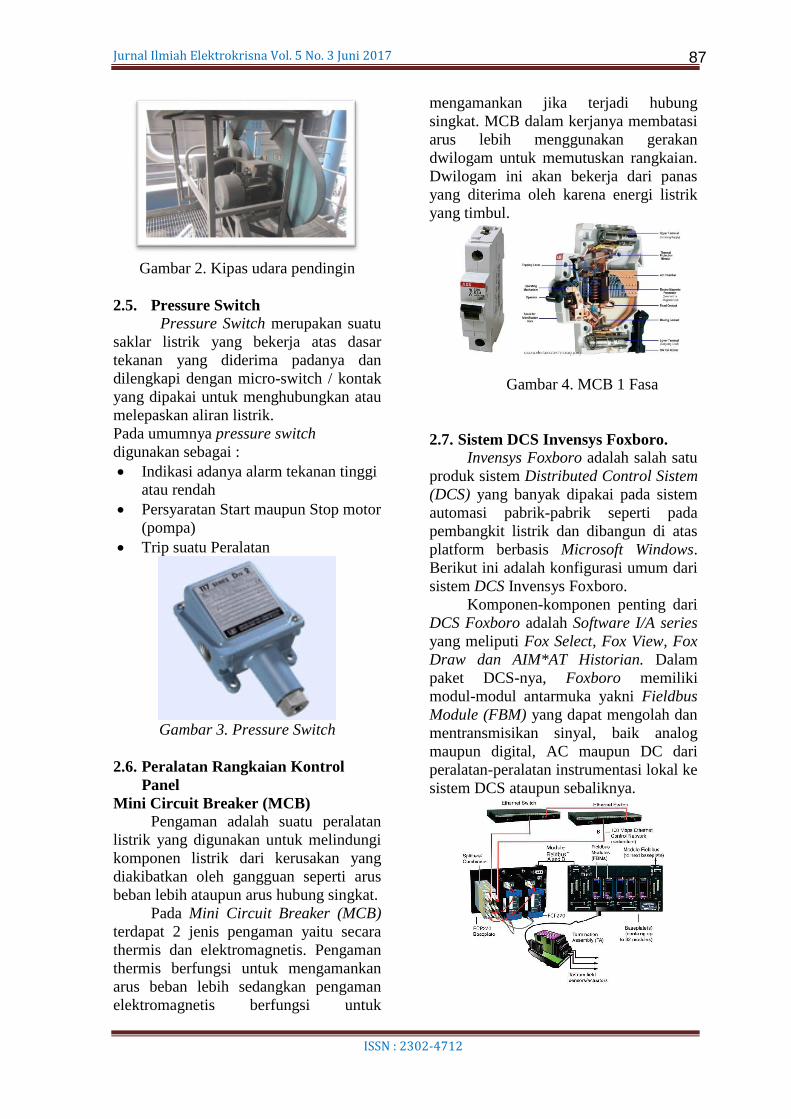
2.4. Kipas Udara Pendingin / Cooling
Air Fan (CAF)
Kipas udara pendingin adalah kipas
yang berfungsi untuk untuk
mendinginkan peralatan pendeteksi api
yang berfungsi untuk mendeteksi adanya
nyala api pada ruang bakar. Pendeteksi
api ini sangatlah penting pada ruang
bakar sebagai proteksi kemungkinan
adanya ledakan diboiler karena adanya
penumpukan bahan bakar pada oil gun,
dan ketika oil gun dinyalakan maka
kemungkinan adanya ledakan pada ruang
bakar dapat terjadi, oleh karena itu
peralatan ini harus terjaga dengan baik.
86
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Gambar 2. Kipas udara pendingin
2.5. Pressure Switch
Pressure Switch merupakan suatu
saklar listrik yang bekerja atas dasar
tekanan yang diderima padanya dan
dilengkapi dengan micro-switch / kontak
yang dipakai untuk menghubungkan atau
melepaskan aliran listrik.
Pada umumnya pressure switch
digunakan sebagai :
Indikasi adanya alarm tekanan tinggi
atau rendah
Persyaratan Start maupun Stop motor
(pompa)
Trip suatu Peralatan
Gambar 3. Pressure Switch
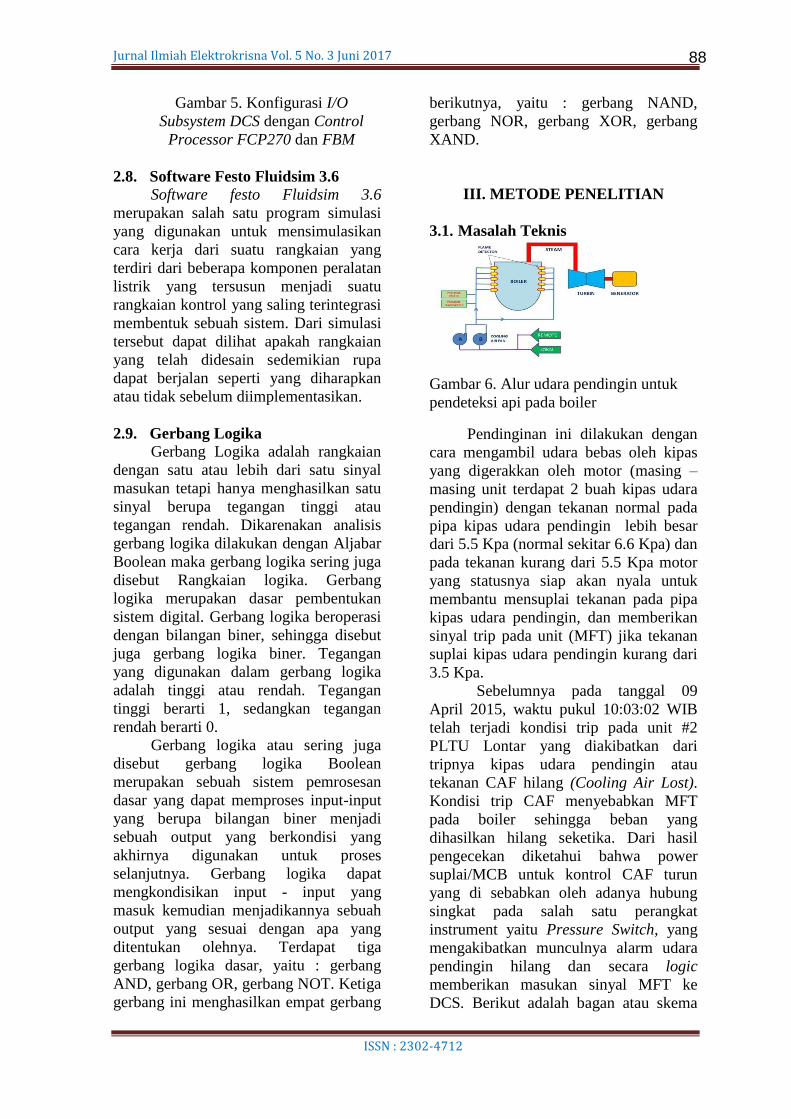
2.6. Peralatan Rangkaian Kontrol
Panel
Mini Circuit Breaker (MCB)
Pengaman adalah suatu peralatan
listrik yang digunakan untuk melindungi
komponen listrik dari kerusakan yang
diakibatkan oleh gangguan seperti arus
beban lebih ataupun arus hubung singkat.
Pada Mini Circuit Breaker (MCB)
terdapat 2 jenis pengaman yaitu secara
thermis dan elektromagnetis. Pengaman
thermis berfungsi untuk mengamankan
arus beban lebih sedangkan pengaman
elektromagnetis berfungsi untuk
mengamankan jika terjadi hubung
singkat. MCB dalam kerjanya membatasi
arus lebih menggunakan gerakan
dwilogam untuk memutuskan rangkaian.
Dwilogam ini akan bekerja dari panas
yang diterima oleh karena energi listrik
yang timbul.
Gambar 4. MCB 1 Fasa
2.7. Sistem DCS Invensys Foxboro.
Invensys Foxboro adalah salah satu
produk sistem Distributed Control Sistem
(DCS) yang banyak dipakai pada sistem
automasi pabrik-pabrik seperti pada
pembangkit listrik dan dibangun di atas
platform berbasis Microsoft Windows.
Berikut ini adalah konfigurasi umum dari
sistem DCS Invensys Foxboro.
Komponen-komponen penting dari
DCS Foxboro adalah Software I/A series
yang meliputi Fox Select, Fox View, Fox
Draw dan AIM*AT Historian. Dalam
paket DCS-nya, Foxboro memiliki
modul-modul antarmuka yakni Fieldbus
Module (FBM) yang dapat mengolah dan
mentransmisikan sinyal, baik analog
maupun digital, AC maupun DC dari
peralatan-peralatan instrumentasi lokal ke
sistem DCS ataupun sebaliknya.
87
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Gambar 5. Konfigurasi I/O
Subsystem DCS dengan Control
Processor FCP270 dan FBM
2.8. Software Festo Fluidsim 3.6
Software festo Fluidsim 3.6
merupakan salah satu program simulasi
yang digunakan untuk mensimulasikan
cara kerja dari suatu rangkaian yang
terdiri dari beberapa komponen peralatan
listrik yang tersusun menjadi suatu
rangkaian kontrol yang saling terintegrasi
membentuk sebuah sistem. Dari simulasi
tersebut dapat dilihat apakah rangkaian
yang telah didesain sedemikian rupa
dapat berjalan seperti yang diharapkan
atau tidak sebelum diimplementasikan.
2.9. Gerbang Logika
Gerbang Logika adalah rangkaian
dengan satu atau lebih dari satu sinyal
masukan tetapi hanya menghasilkan satu
sinyal berupa tegangan tinggi atau
tegangan rendah. Dikarenakan analisis
gerbang logika dilakukan dengan Aljabar
Boolean maka gerbang logika sering juga
disebut Rangkaian logika. Gerbang
logika merupakan dasar pembentukan
sistem digital. Gerbang logika beroperasi
dengan bilangan biner, sehingga disebut
juga gerbang logika biner. Tegangan
yang digunakan dalam gerbang logika
adalah tinggi atau rendah. Tegangan
tinggi berarti 1, sedangkan tegangan
rendah berarti 0.
Gerbang logika atau sering juga
disebut gerbang logika Boolean
merupakan sebuah sistem pemrosesan
dasar yang dapat memproses input-input
yang berupa bilangan biner menjadi
sebuah output yang berkondisi yang
akhirnya digunakan untuk proses
selanjutnya. Gerbang logika dapat
mengkondisikan input - input yang
masuk kemudian menjadikannya sebuah
output yang sesuai dengan apa yang
ditentukan olehnya. Terdapat tiga
gerbang logika dasar, yaitu : gerbang
AND, gerbang OR, gerbang NOT. Ketiga
gerbang ini menghasilkan empat gerbang
berikutnya, yaitu : gerbang NAND,
gerbang NOR, gerbang XOR, gerbang
XAND.
III. METODE PENELITIAN
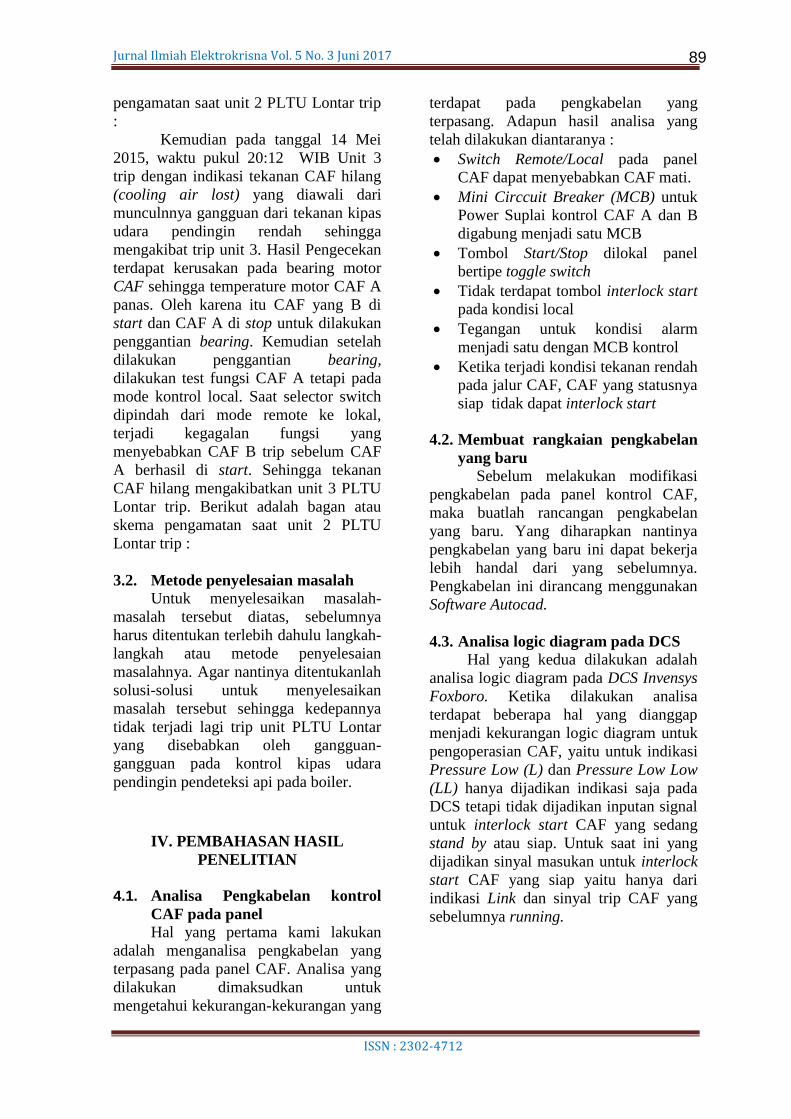
3.1. Masalah Teknis
Gambar 6. Alur udara pendingin untuk
pendeteksi api pada boiler
Pendinginan ini dilakukan dengan
cara mengambil udara bebas oleh kipas
yang digerakkan oleh motor (masing –
masing unit terdapat 2 buah kipas udara
pendingin) dengan tekanan normal pada
pipa kipas udara pendingin lebih besar
dari 5.5 Kpa (normal sekitar 6.6 Kpa) dan
pada tekanan kurang dari 5.5 Kpa motor
yang statusnya siap akan nyala untuk
membantu mensuplai tekanan pada pipa
kipas udara pendingin, dan memberikan
sinyal trip pada unit (MFT) jika tekanan
suplai kipas udara pendingin kurang dari
3.5 Kpa.
Sebelumnya pada tanggal 09
April 2015, waktu pukul 10:03:02 WIB
telah terjadi kondisi trip pada unit #2
PLTU Lontar yang diakibatkan dari
tripnya kipas udara pendingin atau
tekanan CAF hilang (Cooling Air Lost).
Kondisi trip CAF menyebabkan MFT
pada boiler sehingga beban yang
dihasilkan hilang seketika. Dari hasil
pengecekan diketahui bahwa power
suplai/MCB untuk kontrol CAF turun
yang di sebabkan oleh adanya hubung
singkat pada salah satu perangkat
instrument yaitu Pressure Switch, yang
mengakibatkan munculnya alarm udara
pendingin hilang dan secara logic
memberikan masukan sinyal MFT ke
DCS. Berikut adalah bagan atau skema
88
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
pengamatan saat unit 2 PLTU Lontar trip
:
Kemudian pada tanggal 14 Mei
2015, waktu pukul 20:12 WIB Unit 3
trip dengan indikasi tekanan CAF hilang
(cooling air lost) yang diawali dari
munculnnya gangguan dari tekanan kipas
udara pendingin rendah sehingga
mengakibat trip unit 3. Hasil Pengecekan
terdapat kerusakan pada bearing motor
CAF sehingga temperature motor CAF A
panas. Oleh karena itu CAF yang B di
start dan CAF A di stop untuk dilakukan
penggantian bearing. Kemudian setelah
dilakukan penggantian bearing,
dilakukan test fungsi CAF A tetapi pada
mode kontrol local. Saat selector switch
dipindah dari mode remote ke lokal,
terjadi kegagalan fungsi yang
menyebabkan CAF B trip sebelum CAF
A berhasil di start. Sehingga tekanan
CAF hilang mengakibatkan unit 3 PLTU
Lontar trip. Berikut adalah bagan atau
skema pengamatan saat unit 2 PLTU
Lontar trip :
3.2. Metode penyelesaian masalah
Untuk menyelesaikan masalah-
masalah tersebut diatas, sebelumnya
harus ditentukan terlebih dahulu langkah-
langkah atau metode penyelesaian
masalahnya. Agar nantinya ditentukanlah
solusi-solusi untuk menyelesaikan
masalah tersebut sehingga kedepannya
tidak terjadi lagi trip unit PLTU Lontar
yang disebabkan oleh gangguan-
gangguan pada kontrol kipas udara
pendingin pendeteksi api pada boiler.
IV. PEMBAHASAN HASIL
PENELITIAN
4.1. Analisa Pengkabelan kontrol
CAF pada panel
Hal yang pertama kami lakukan
adalah menganalisa pengkabelan yang
terpasang pada panel CAF. Analisa yang
dilakukan dimaksudkan untuk
mengetahui kekurangan-kekurangan yang
terdapat pada pengkabelan yang
terpasang. Adapun hasil analisa yang
telah dilakukan diantaranya :
Switch Remote/Local pada panel
CAF dapat menyebabkan CAF mati.
Mini Circcuit Breaker (MCB) untuk
Power Suplai kontrol CAF A dan B
digabung menjadi satu MCB
Tombol Start/Stop dilokal panel
bertipe toggle switch
Tidak terdapat tombol interlock start
pada kondisi local
Tegangan untuk kondisi alarm
menjadi satu dengan MCB kontrol
Ketika terjadi kondisi tekanan rendah
pada jalur CAF, CAF yang statusnya
siap tidak dapat interlock start
4.2. Membuat rangkaian pengkabelan
yang baru
Sebelum melakukan modifikasi
pengkabelan pada panel kontrol CAF,
maka buatlah rancangan pengkabelan
yang baru. Yang diharapkan nantinya
pengkabelan yang baru ini dapat bekerja
lebih handal dari yang sebelumnya.
Pengkabelan ini dirancang menggunakan
Software Autocad.
4.3. Analisa logic diagram pada DCS
Hal yang kedua dilakukan adalah
analisa logic diagram pada DCS Invensys
Foxboro. Ketika dilakukan analisa
terdapat beberapa hal yang dianggap
menjadi kekurangan logic diagram untuk
pengoperasian CAF, yaitu untuk indikasi
Pressure Low (L) dan Pressure Low Low
(LL) hanya dijadikan indikasi saja pada
DCS tetapi tidak dijadikan inputan signal
untuk interlock start CAF yang sedang
stand by atau siap. Untuk saat ini yang
dijadikan sinyal masukan untuk interlock
start CAF yang siap yaitu hanya dari
indikasi Link dan sinyal trip CAF yang
sebelumnya running.
89

Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Gambar 7. Logic diagram interlock start
CAF pada DCS sebelum dimodifikasi
4.4. Simulasi pengkabelan yang baru
dengan Software Festo Fluidsim
3.6
Setelah selesai merancang wiring
diagram yang baru mengunakan software
Autocad langkah selanjutkan yaitu
mensimulasikan pengkabelan tersebut
dengan menggunakan software Festo
Fluidsim 3.6 untuk memastikan apakah
pengkabelan yang telah dirancang sudah
benar bekerja sesuai harapan atau belum.
Software festo Fluidsim 3.6 merupakan
salah satu program simulasi yang
digunakan untuk mensimulasikan cara
kerja dari suatu rangkaian yang terdiri
dari beberapa komponen peralatan listrik
yang tersusun menjadi suatu rangkaian
kontrol yang saling terintegrasi
membentuk sebuah sistem. Dari simulasi
tersebut dapat dilihat apakah rangkaian
yang telah didesain sedemikian rupa
dapat berjalan seperti yang diharapkan
atau tidak sebelum diimplementasikan.
4.5. Instalasi pengkabelan pada panel
kontrol CAF
Setelah merancang pengkabelan
yang baru dengan software Autocad,
kemudian mensimulasikan dengan
software Festo Fluidsim 3.6 dilanjut
dengan menyiapkan material tambahan,
maka hal yg harus dilakukan selanjutnya
ialah menginstalasi ulang pengkabelan
kontrol CAF sesuai dengan rancangan
wiring yang telah dibuat dan
disimulasikan. Dikarenakan kondisi
sistem CAF yang harus selalu menyala
saat kondisi unit operasi, proses
pelaksanaan merangkai pengkabelan
yang baru harus dilakukan saat kondisi
Unit/Boiler Stop dan CAF stop.
Pelaksanaan merangkai pengkabelan
yang baru dilakukan selama kurun waktu
12 hari untuk 2 unit.
4.6. Instalasi logic diagram pada DCS
Invensys Foxboro
Maksud pada proses ini adalah
instalasi logic diagram yang berfungsi
untuk interlock start CAF. Yaitu apabila
misal CAF A sedang operasi akan tetapi
tekanan yang dihasilkan oleh CAF
tersebut tidak bisa mencapai tekanan
yang diharapkan/sesuai standart operasi
pembangkit, maka Pressure Switch akan
mendeteksi Pressure Low yang kemudian
akan mengaktifkan rele alarm Pressure
Low. Sinyal alarm Pressure Low akan
dikirim ke DCS yang kemudian akan
diproses pada ICC DCS Invensys
Foxboro, setelah diproses akan
mengaktifkan CAF yang B untuk operasi,
sehingga akan menambah tekanan sampai
yang diinginkan. Begitu juga sebaliknya.
Gambar 8. Logic diagram Interlock
Start CAF sebelum dan sesudah
modifikasi
Sebelum instaasi logic pada DCS
Invensys Foxboro tentukan terlebih
dahulu tentukan indikasi alarm apa saja
yang akan diolah menjadi logic diagram
dan tentukan alamat Field Bus Module
(FBM) yang akan digunakan untuk
alarm-alarm tersebut. Disini indikasi
alarm yang akan digunakan adalah alarm
Pressure Low (L) dan alarm Pressure
Low Low (LL). Untuk alarm Pressure
Low (L) menggunakan FBM type 207
dengan alamat 2IDI:DI102609,
sedangkan untuk alarm Pressure Low
Low (LL) menggunakan FBM type 207
juga dengan alamat 2IDI:DI102610.
90
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
4.7. Pengujian / Commisioning Test
Setelah perancangan pengkabelan
diagram pada panel kontrol CAF dan
Instalasi logic diagram pada DCS
Invensys Foxboro selesai, maka langkah
berikutnya yaitu dilakukan pengujian
untuk memastikan apakah sistem kontrol
CAF sudah benar-benar bekerja sesuai
dengan yang diharapkan atau belum.
Pengujian dilakukan melalui 2 tahap,
yaitu pengujian secara Lokal (dari panel
kontrol CAF) dan pengujian secara
Remote DCS (dari Central Control
Room). Didalam pengujian ini melibatkan
beberapa pihak terkait, seperti bagian
Engineering, Teknisi Control Instrumen,
Teknisi Listrik, Teknisi Mekanik serta
pihak Operator.
Gambar 9. Proses Pengujian secara
Lokal
Setelah selesai melakukan
pengujian baik secara lokal maupun
remote maka hasilnya catat pada lembar
Commisioning test. Kemudian lepas
Tagging Off pada Breaker sumber
tegangan yang ke panel kontrol CAF.
V. KESIMPULAN
1. Dengan adanya modifikasi
pengkabelan kontrol kipas udara
pendingin atau CAF untuk mencegah
trip unit PLTU Banten 3 Lontar,
maka sistem kontrol CAF semakin
handal dan dapat mengurangi potensi
terjadinya trip unit akibat kegagalan
dari power suplai kontrol CAF
2. Modifikasi pengkabelan kontrol CAF
pada PLTU Banten 3 Lontar sudah
diaplikasikan pada unit 1, 2, 3 dan
dapat mengurangi potensi kerugian
sampai milyaran rupiah.
3. Setelah dilakukan modifikasi ini,
gangguan trip unit dari power suplai
kontrol CAF tidak pernah terjadi
lagi, hal ini bisa dibuktikan
berdasarkan data pareto loss
opportunity of production Derating
& Outage PLTU lontar hingga juli
2016.
DAFTAR PUSTAKA
[1] Udiklat, PLN. 2005. Pengoperasian
PLTU. Jakarta: PT.PLN Pusat
Pendidikan dan Pelatihan
[2] Subakti, Imam. 2012. Modul In
House Training Pengadaan. Jakarta:
PT.Cogindo Daya Bersama
[3] Foxboro, Invensys. 2004. I/A Series®
FoxDraw™ Software.
Massachusetts:Foxboro
[4] Foxboro, Invensys. 2007. I/A Series®
Integrated Control Block Descriptions
Volume 1 of 3. Massachusetts: Foxboro
[5] Foxboro, Invensys. 2004. I/A Series®
Integrated Control
Configurator.Massachusetts: Foxboro
[6] Suhariyanto, Agus. 2010. Peralatan
logic dan sequence. Tangerang: PLTU
Banten 3 Lontar
[7] Suhariyanto, Agus. 2010. Peralatan
dan diagram rangkaian listrik.
Tangerang:PLTU Banten 3 Lontar
91

92Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
ANALISA SISTEM PENTAHANAN PADA GEDUNG DIRJEN PAJAK
Oleh : Lukman Aditya1
ABSTRAK Sistem pentanahan merupakan suatu tindakan pengamanan pada instalasi listrik
dimana rangkaiannya ditanamkan dengan cara mengalirkan arus yang lebih atau arus
gangguan ke tanah, pentanahan atau grounding menggunakan elektroda pentanahan yang
ditanam dalam tanah. Salah satu faktor untuk mendapatkan nilai tahanan pentanahan yang
kecil yaitu ada pada letak dan kedalaman elektroda yang akan ditanam, untuk mengetahui nilai
pentahanan tersebut maka diperlukan pengukuran. Sedangkan salah satu unsur yang perlu
diperhatikan dalam pengukuran suatu sistem pentanahan adalah kondisi tanah yang akan
dipasang sistem pentanahan.
Hasil dari analisa bahwa semakin dalam penanaman elektroda, maka akan semakin kecil
tahanannya, begitu pula dengan semakin jauh jarak penanaman elektroda maka akan semakin
kecil pula tahanannya.
Pentanahan yang baik untuk tegangan tinggi harus benar-benar di bawah satu (1 ohm)
tahananya, agar ketika terjadi arus lebih maka grounding akan bekerja dengan baik.
Karakteristik tanah yang memiliki kadar garam yang tinggi akan memberikan hasil tahanan
yang baik. Untuk mencari atau memperoleh tahanan pentanahan yang baik diusahakan
mencari tanah yang benar-benar lembab atau basah
ABSTRACT The grounding system is a security measure on electrical installations
where the circuit is implanted by passing more current or ground to ground, grounding or
grounding using grounded ground electrode. One of the factors to get the existing ground on
the location and depth of the electrode to be planted, to determine the resistance is required
measurement. Which one of the elements that need to be considered in a grounding system is
the ground condition to be installed earthing system.
The result of the deeper analysis in the electrode process, the smaller the resistance, as
well as the further distance with the electrode will be the smaller the prisoners.
Good grounding for high voltage must be really below one (1 ohm) captive, so that if there is
more current then grounding will work well. Characteristics of soils that have a high salt
content will provide good resistance results. To find or obtain a good ground is sought for soil
that is really moist or wet
Keywords: earthing, wet, dry, electrode
1.PENDAHULUAN
1.1 Latar Belakang
Pada tahun 2011 telah terjadi kebakaran
pada Gedung Direktorat Jenderal Pajak
yang dikarenakan kurang baiknya sistem
pentanahan pada area gedung dan
komponen listrik yang terpasang, oleh
karena itu sistem pentanahan sangat
mempunyai peranan yang sangat penting
dalam sistem proteksi. Sistem pentanahan
digunakan untuk pengamanan peralatan-
peralatan yang menggunakan sumber listrik
sehingga dapat mengamankan manusia dari
sengatan listrik dan petir. Menurut jenisnya
pentanahan dibedakan menjadi 2, yaitu
pentanahan titik netral sistem tenaga dan
pentanahan peralatan. Pentanahan titik
netral sistem tenaga berfungsi sebagai
pengaman sistem atau jaringan, sedangkan
pada pentanahan peralatan berfungsi
93Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
sebagai pengaman terhadap tegangan
sentuh.
Sistem pentanahan dilakukan
dengan cara menanamkan batang elektroda
pentanahan tegak lurus, kemudian bantang
elektroda pentanahan itu di tanam kedalam
tanah dengan kedalaman yang telah di
tentukan. Hal ini dilakukan untuk mencapai
nilai tahanan pentanahan yang diinginkan
yaitu tidak lebih dari 0,3 ohm.
Sistem pentanahan yang baik adalah sistem
pentanahan yang memiliki nilai tahanan
pentanahan yang kecil. Untuk
mendapatkan tahanan pentanahan yang
kecil maka perlu dilakukan percobaan.
1.2. Tujuan Penelitian
Maksud dari penelitian ini adalah
untuk mengetahui bagaimana cara
penanaman elektroda pentanahan jenis
batang dengan benar dan untuk mengetahui
pengaruh kedalam penanaman batang
elektroda terhadap nilai tahanan
pentanahan dengan konfigurasi vertical dan
segitiga sama sisi pada elektroda jenis
batang.
2. TEORI SINGKAT
Pengertian Pentanahan
Sistem pentanahan adalah sistem
hubungan penghantar yang
menghubungkan sistem, badan peralatan
dan instalasi dengan bumi/tanah sehingga
dapat mengamankan manusia dari sengatan
listrik, dan mengamankan komponen-
komponen instalasi dari bahaya
tegangan/arus normal.
secara umum tujuan sistem
pentanahan adalah:
1. Menjamin keselamatan manusia dari
sengatan listrik baik dalam keadaan
normal atau tidak dari tegangan sentuh
dan tegangan langkah.
2. Mencegah kerusakan peralatan
listrik/elektronik
3. Menyalurkan energi serangan petir ke
tanah
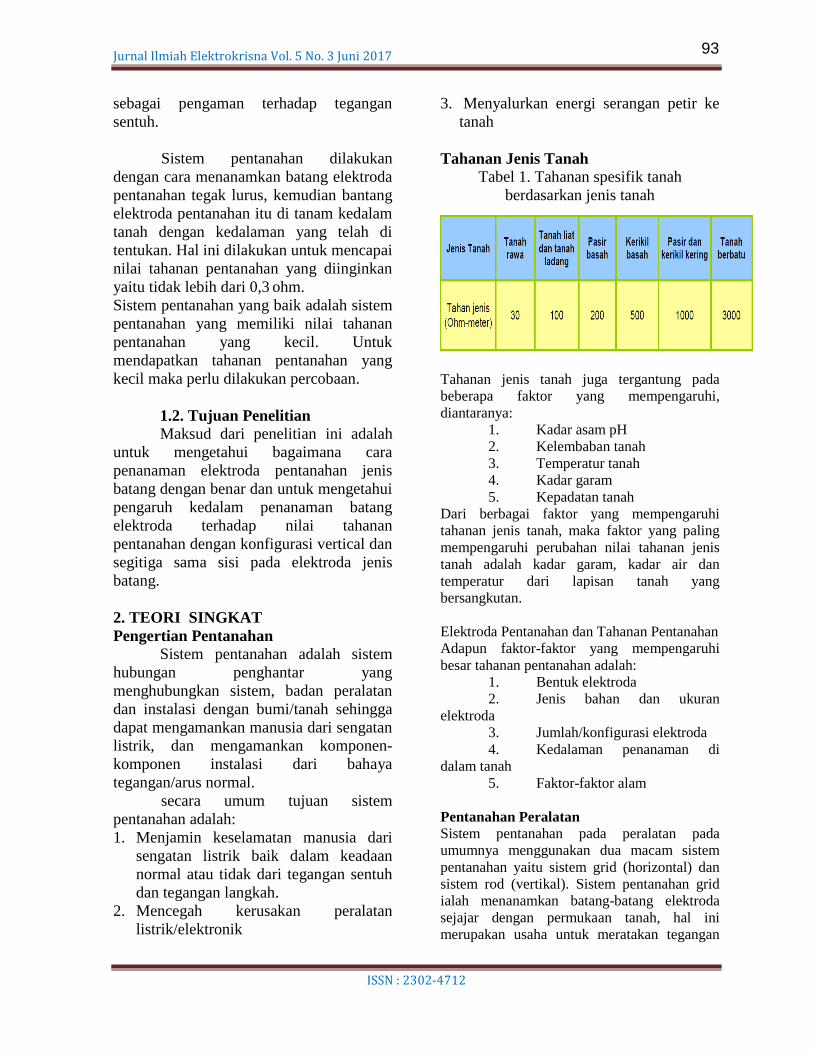
Tahanan Jenis Tanah
Tabel 1. Tahanan spesifik tanah
berdasarkan jenis tanah
Tahanan jenis tanah juga tergantung pada
beberapa faktor yang mempengaruhi,
diantaranya:
1. Kadar asam pH
2. Kelembaban tanah
3. Temperatur tanah
4. Kadar garam
5. Kepadatan tanah
Dari berbagai faktor yang mempengaruhi
tahanan jenis tanah, maka faktor yang paling
mempengaruhi perubahan nilai tahanan jenis
tanah adalah kadar garam, kadar air dan
temperatur dari lapisan tanah yang
bersangkutan.
Elektroda Pentanahan dan Tahanan Pentanahan
Adapun faktor-faktor yang mempengaruhi
besar tahanan pentanahan adalah:
1. Bentuk elektroda
2. Jenis bahan dan ukuran
elektroda
3. Jumlah/konfigurasi elektroda
4. Kedalaman penanaman di
dalam tanah
5. Faktor-faktor alam
Pentanahan Peralatan
Sistem pentanahan pada peralatan pada
umumnya menggunakan dua macam sistem
pentanahan yaitu sistem grid (horizontal) dan
sistem rod (vertikal). Sistem pentanahan grid
ialah menanamkan batang-batang elektroda
sejajar dengan permukaan tanah, hal ini
merupakan usaha untuk meratakan tegangan
94Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
yang timbul. Sedangkan sistem rod
ialah menanamkan batang-batang elektroda
tegak lurus kedalam tanah, hal ini fungsinya
hanya mengurangi (memperkecil) tahanan
pentanahan. Jadi yang membedakan sistem ini
adalah pentanahan ini hanya dengan cara
penanaman elektrodanya. Adapun penjelasan
dari sistem grid dan sistem rod adalah sebagai
berikut :
1. Sistem Grid
Pada sistem batang–batang elektroda
ditanam sejajar permukaan tanah, batang–
batang ini terhubung satu lama lain. Dengan
cara ini jumlah konduktor yang ditanam
banyak sekali, maka bentuknya mendekati
bentuk plat dan ini merupakan bentuk
maksimum atau yang mempunyai harga
tahanan paling kecil luas daerah tertentu, tetapi
bentuk ini tidak efisien atau mahal.
2. Sistem Rod
Pada sistem ini untuk memperkecil
tahanan pentanahan, maka batang konduktor
dapat diperbanyak penanamannya. Apabila
terjadi arus gangguan ketanah, maka arus
gangguan ini akan mengakibatkan naiknya
gradient tegangan permukaan tanah. Besarnya
tegangan maksimum yang timbul tersebut
sebanding dengan tahanan pentanahan.
Jenis-Jenis Elektroda Pentanahan
Pada prinsipnya jenis elektroda dipilih
yang mempunyai kontak sangat baik terhadap
tanah. Berikut ini akan dibahas jenis-jenis
elektroda pentanahan.
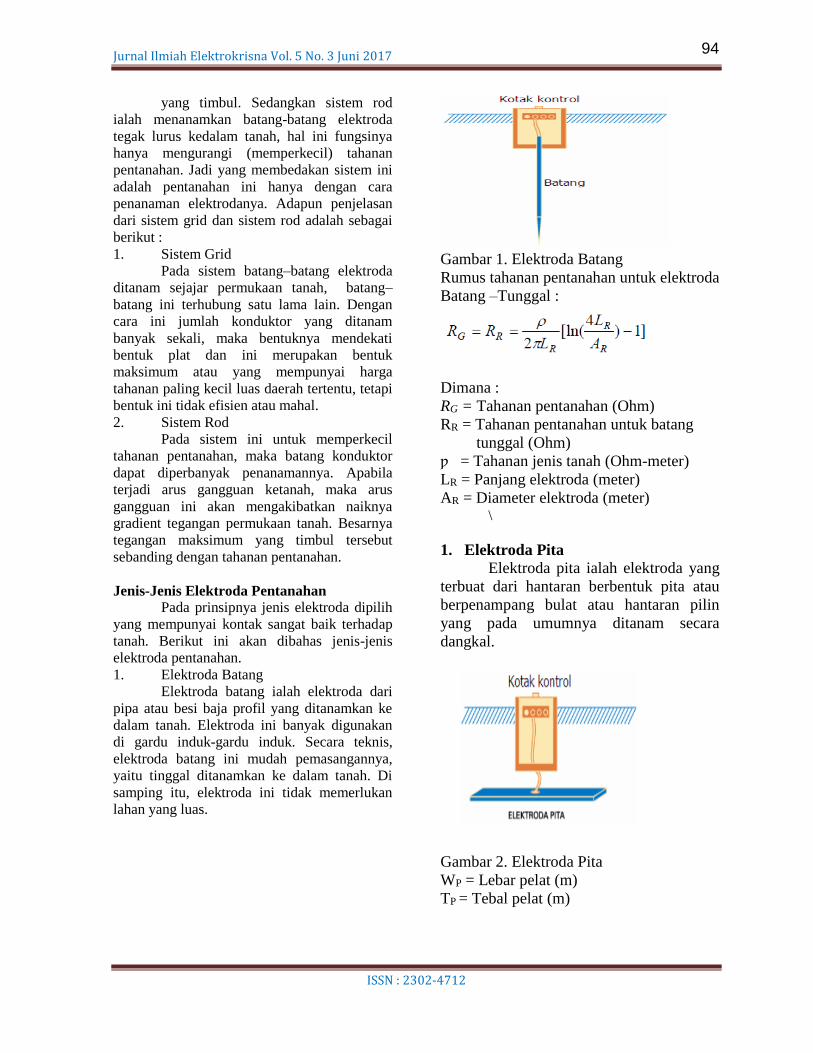
1. Elektroda Batang
Elektroda batang ialah elektroda dari
pipa atau besi baja profil yang ditanamkan ke
dalam tanah. Elektroda ini banyak digunakan
di gardu induk-gardu induk. Secara teknis,
elektroda batang ini mudah pemasangannya,
yaitu tinggal ditanamkan ke dalam tanah. Di
samping itu, elektroda ini tidak memerlukan
lahan yang luas.
Gambar 1. Elektroda Batang
Rumus tahanan pentanahan untuk elektroda
Batang –Tunggal :
Dimana :
RG = Tahanan pentanahan (Ohm)
RR = Tahanan pentanahan untuk batang
tunggal (Ohm)
ƿ = Tahanan jenis tanah (Ohm-meter)
LR = Panjang elektroda (meter)
AR = Diameter elektroda (meter) \
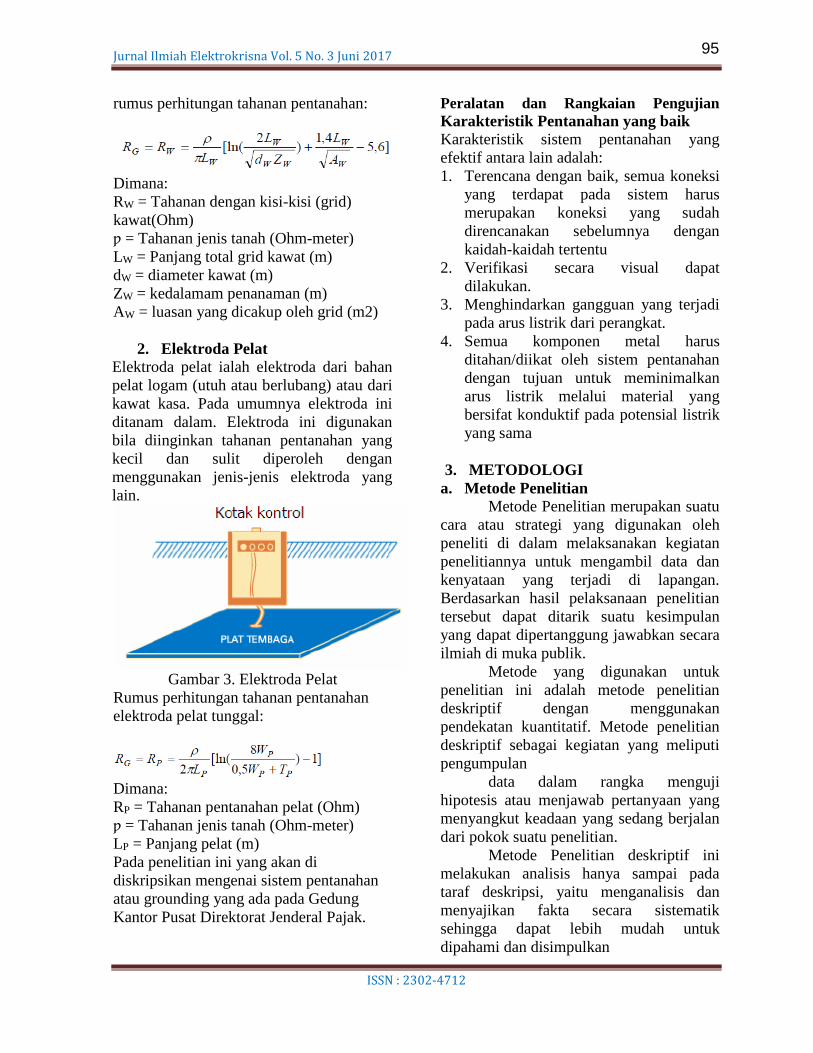
1. Elektroda Pita
Elektroda pita ialah elektroda yang
terbuat dari hantaran berbentuk pita atau
berpenampang bulat atau hantaran pilin
yang pada umumnya ditanam secara
dangkal.
Gambar 2. Elektroda Pita
WP = Lebar pelat (m)
TP = Tebal pelat (m)
95Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
rumus perhitungan tahanan pentanahan:
Dimana:
RW = Tahanan dengan kisi-kisi (grid)
kawat(Ohm)
ƿ = Tahanan jenis tanah (Ohm-meter)
LW = Panjang total grid kawat (m)
dW = diameter kawat (m)
ZW = kedalamam penanaman (m)
AW = luasan yang dicakup oleh grid (m2)
2. Elektroda Pelat
Elektroda pelat ialah elektroda dari bahan
pelat logam (utuh atau berlubang) atau dari
kawat kasa. Pada umumnya elektroda ini
ditanam dalam. Elektroda ini digunakan
bila diinginkan tahanan pentanahan yang
kecil dan sulit diperoleh dengan
menggunakan jenis-jenis elektroda yang
lain.
Gambar 3. Elektroda Pelat
Rumus perhitungan tahanan pentanahan
elektroda pelat tunggal:
Dimana:
RP = Tahanan pentanahan pelat (Ohm)
ƿ = Tahanan jenis tanah (Ohm-meter)
LP = Panjang pelat (m)
Pada penelitian ini yang akan di
diskripsikan mengenai sistem pentanahan
atau grounding yang ada pada Gedung
Kantor Pusat Direktorat Jenderal Pajak.
Peralatan dan Rangkaian Pengujian
Karakteristik Pentanahan yang baik
Karakteristik sistem pentanahan yang
efektif antara lain adalah:
1. Terencana dengan baik, semua koneksi
yang terdapat pada sistem harus
merupakan koneksi yang sudah
direncanakan sebelumnya dengan
kaidah-kaidah tertentu
2. Verifikasi secara visual dapat
dilakukan.
3. Menghindarkan gangguan yang terjadi
pada arus listrik dari perangkat.
4. Semua komponen metal harus
ditahan/diikat oleh sistem pentanahan
dengan tujuan untuk meminimalkan
arus listrik melalui material yang
bersifat konduktif pada potensial listrik
yang sama
3. METODOLOGI
a. Metode Penelitian
Metode Penelitian merupakan suatu
cara atau strategi yang digunakan oleh
peneliti di dalam melaksanakan kegiatan
penelitiannya untuk mengambil data dan
kenyataan yang terjadi di lapangan.
Berdasarkan hasil pelaksanaan penelitian
tersebut dapat ditarik suatu kesimpulan
yang dapat dipertanggung jawabkan secara
ilmiah di muka publik.
Metode yang digunakan untuk
penelitian ini adalah metode penelitian
deskriptif dengan menggunakan
pendekatan kuantitatif. Metode penelitian
deskriptif sebagai kegiatan yang meliputi
pengumpulan
data dalam rangka menguji
hipotesis atau menjawab pertanyaan yang
menyangkut keadaan yang sedang berjalan
dari pokok suatu penelitian.
Metode Penelitian deskriptif ini
melakukan analisis hanya sampai pada
taraf deskripsi, yaitu menganalisis dan
menyajikan fakta secara sistematik
sehingga dapat lebih mudah untuk
dipahami dan disimpulkan
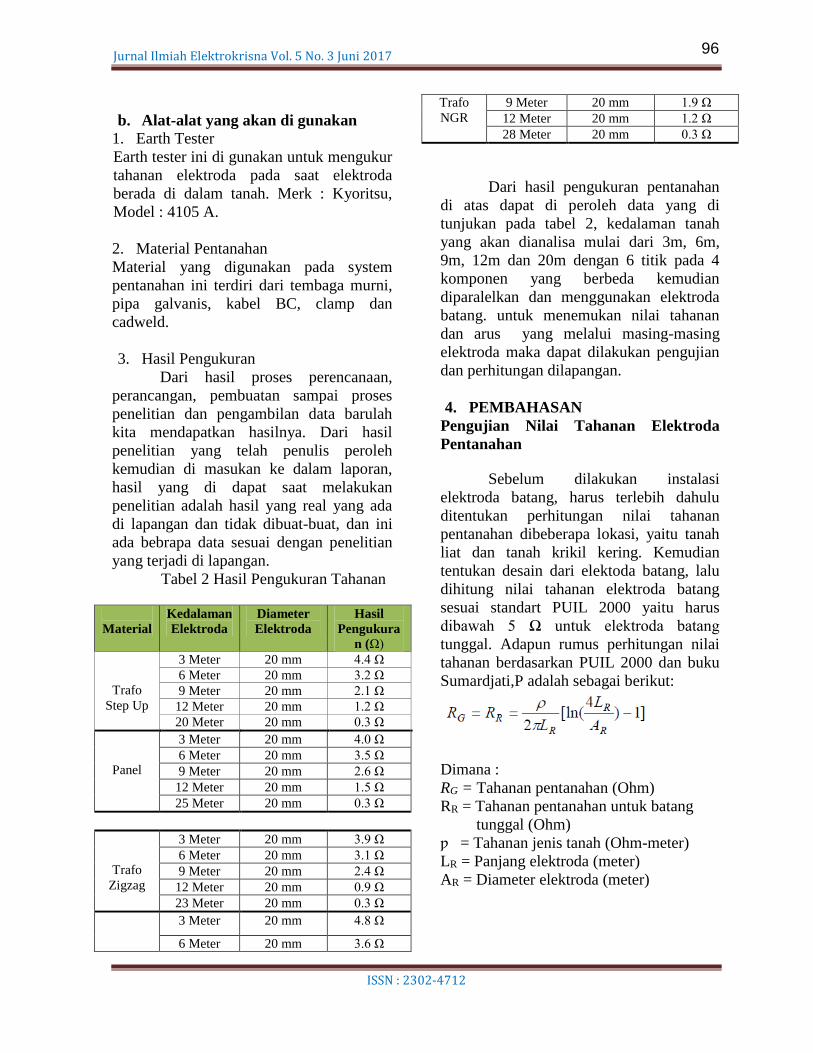
96Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
b. Alat-alat yang akan di gunakan 1. Earth Tester
Earth tester ini di gunakan untuk mengukur
tahanan elektroda pada saat elektroda
berada di dalam tanah. Merk : Kyoritsu,
Model : 4105 A.
2. Material Pentanahan
Material yang digunakan pada system
pentanahan ini terdiri dari tembaga murni,
pipa galvanis, kabel BC, clamp dan
cadweld.
3. Hasil Pengukuran
Dari hasil proses perencanaan,
perancangan, pembuatan sampai proses
penelitian dan pengambilan data barulah
kita mendapatkan hasilnya. Dari hasil
penelitian yang telah penulis peroleh
kemudian di masukan ke dalam laporan,
hasil yang di dapat saat melakukan
penelitian adalah hasil yang real yang ada
di lapangan dan tidak dibuat-buat, dan ini
ada bebrapa data sesuai dengan penelitian
yang terjadi di lapangan.
Tabel 2 Hasil Pengukuran Tahanan
Material
Kedalaman
Elektroda
Diameter
Elektroda
Hasil
Pengukura
n (Ω)
Trafo
Step Up
3 Meter 20 mm 4.4 Ω
6 Meter 20 mm 3.2 Ω
9 Meter 20 mm 2.1 Ω
12 Meter 20 mm 1.2 Ω
20 Meter 20 mm 0.3 Ω
Panel
3 Meter 20 mm 4.0 Ω
6 Meter 20 mm 3.5 Ω
9 Meter 20 mm 2.6 Ω
12 Meter 20 mm 1.5 Ω
25 Meter 20 mm 0.3 Ω
Trafo
Zigzag
3 Meter 20 mm 3.9 Ω
6 Meter 20 mm 3.1 Ω
9 Meter 20 mm 2.4 Ω
12 Meter 20 mm 0.9 Ω
23 Meter 20 mm 0.3 Ω
3 Meter 20 mm 4.8 Ω
6 Meter 20 mm 3.6 Ω
Trafo
NGR
9 Meter 20 mm 1.9 Ω
12 Meter 20 mm 1.2 Ω
28 Meter 20 mm 0.3 Ω
Dari hasil pengukuran pentanahan
di atas dapat di peroleh data yang di
tunjukan pada tabel 2, kedalaman tanah
yang akan dianalisa mulai dari 3m, 6m,
9m, 12m dan 20m dengan 6 titik pada 4
komponen yang berbeda kemudian
diparalelkan dan menggunakan elektroda
batang. untuk menemukan nilai tahanan
dan arus yang melalui masing-masing
elektroda maka dapat dilakukan pengujian
dan perhitungan dilapangan.
4. PEMBAHASAN
Pengujian Nilai Tahanan Elektroda
Pentanahan
Sebelum dilakukan instalasi
elektroda batang, harus terlebih dahulu
ditentukan perhitungan nilai tahanan
pentanahan dibeberapa lokasi, yaitu tanah
liat dan tanah krikil kering. Kemudian
tentukan desain dari elektoda batang, lalu
dihitung nilai tahanan elektroda batang
sesuai standart PUIL 2000 yaitu harus
dibawah 5 Ω untuk elektroda batang
tunggal. Adapun rumus perhitungan nilai
tahanan berdasarkan PUIL 2000 dan buku
Sumardjati,P adalah sebagai berikut:
Dimana :
RG = Tahanan pentanahan (Ohm)
RR = Tahanan pentanahan untuk batang
tunggal (Ohm)
ƿ = Tahanan jenis tanah (Ohm-meter)
LR = Panjang elektroda (meter)
AR = Diameter elektroda (meter)
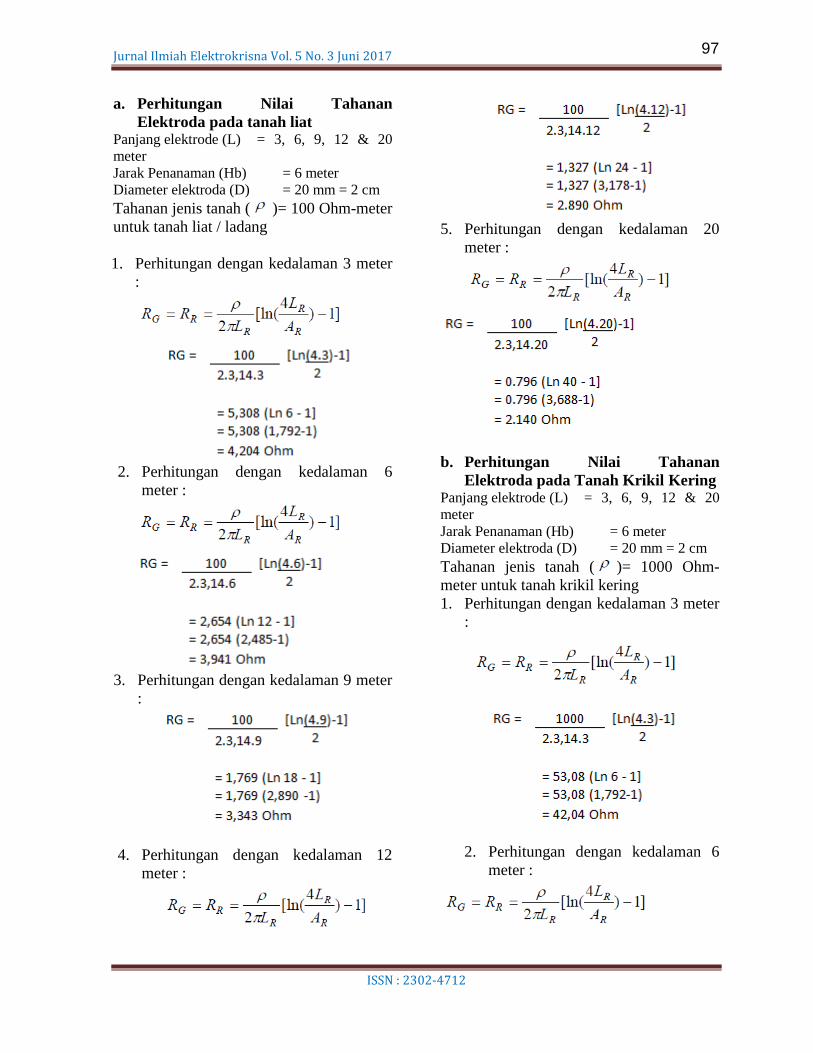
97Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
a. Perhitungan Nilai Tahanan
Elektroda pada tanah liat Panjang elektrode (L) = 3, 6, 9, 12 & 20
meter
Jarak Penanaman (Hb) = 6 meter
Diameter elektroda (D) = 20 mm = 2 cm
Tahanan jenis tanah ( )= 100 Ohm-meter
untuk tanah liat / ladang
1. Perhitungan dengan kedalaman 3 meter
:
2. Perhitungan dengan kedalaman 6
meter :
3. Perhitungan dengan kedalaman 9 meter
:
4. Perhitungan dengan kedalaman 12
meter :
5. Perhitungan dengan kedalaman 20
meter :
b. Perhitungan Nilai Tahanan
Elektroda pada Tanah Krikil Kering Panjang elektrode (L) = 3, 6, 9, 12 & 20
meter
Jarak Penanaman (Hb) = 6 meter
Diameter elektroda (D) = 20 mm = 2 cm
Tahanan jenis tanah ( )= 1000 Ohm-
meter untuk tanah krikil kering
1. Perhitungan dengan kedalaman 3 meter
:
2. Perhitungan dengan kedalaman 6
meter :
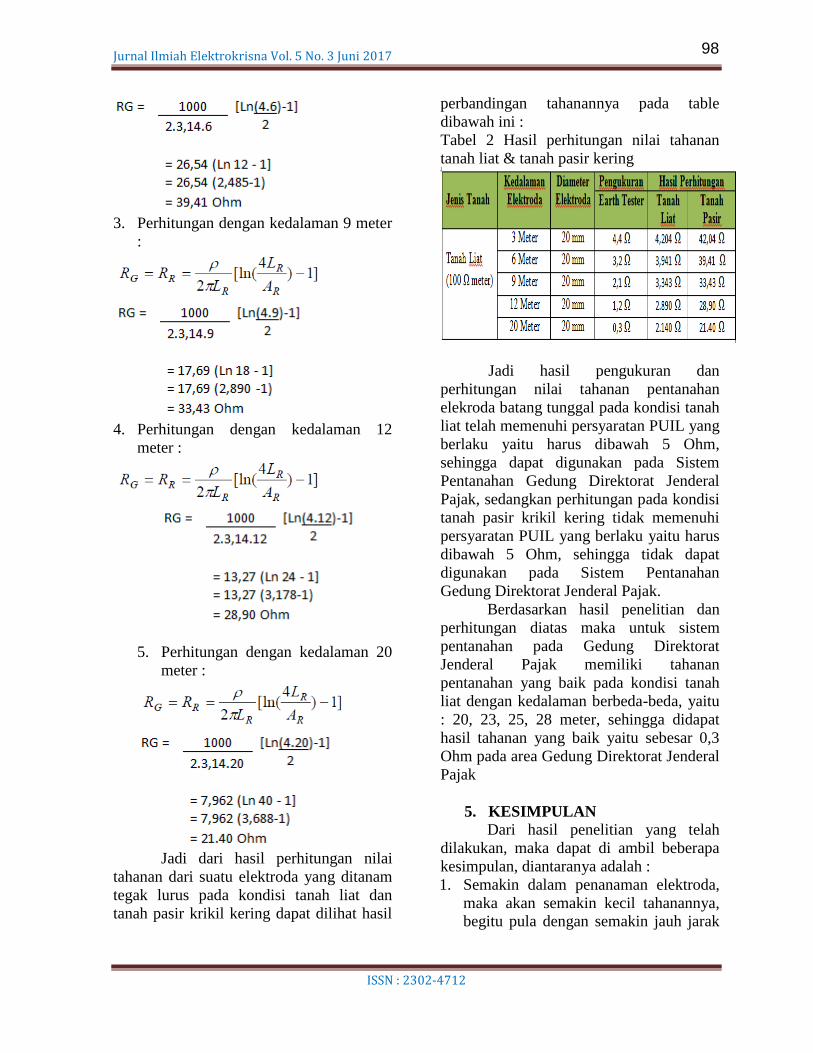
98Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
3. Perhitungan dengan kedalaman 9 meter
:
4. Perhitungan dengan kedalaman 12
meter :
5. Perhitungan dengan kedalaman 20
meter :
Jadi dari hasil perhitungan nilai
tahanan dari suatu elektroda yang ditanam
tegak lurus pada kondisi tanah liat dan
tanah pasir krikil kering dapat dilihat hasil
perbandingan tahanannya pada table
dibawah ini :
Tabel 2 Hasil perhitungan nilai tahanan
tanah liat & tanah pasir kering
Jadi hasil pengukuran dan
perhitungan nilai tahanan pentanahan
elekroda batang tunggal pada kondisi tanah
liat telah memenuhi persyaratan PUIL yang
berlaku yaitu harus dibawah 5 Ohm,
sehingga dapat digunakan pada Sistem
Pentanahan Gedung Direktorat Jenderal
Pajak, sedangkan perhitungan pada kondisi
tanah pasir krikil kering tidak memenuhi
persyaratan PUIL yang berlaku yaitu harus
dibawah 5 Ohm, sehingga tidak dapat
digunakan pada Sistem Pentanahan
Gedung Direktorat Jenderal Pajak.
Berdasarkan hasil penelitian dan
perhitungan diatas maka untuk sistem
pentanahan pada Gedung Direktorat
Jenderal Pajak memiliki tahanan
pentanahan yang baik pada kondisi tanah
liat dengan kedalaman berbeda-beda, yaitu
: 20, 23, 25, 28 meter, sehingga didapat
hasil tahanan yang baik yaitu sebesar 0,3
Ohm pada area Gedung Direktorat Jenderal
Pajak
5. KESIMPULAN
Dari hasil penelitian yang telah
dilakukan, maka dapat di ambil beberapa
kesimpulan, diantaranya adalah :
1. Semakin dalam penanaman elektroda,
maka akan semakin kecil tahanannya,
begitu pula dengan semakin jauh jarak
99Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
penanaman elektroda maka akan
semakin kecil pula tahanannya
2. Pentanahan yang baik untuk tegangan
tinggi harus benar-benar di bawah satu
(1 ohm) tahananya, agar ketika terjadi
arus lebih maka grounding akan bekerja
dengan baik.
3. Karakteristik tanah yang memiliki
kadar garam yang tinggi akan
memberikan hasil tahanan yang baik
4. Untuk mencari atau memperoleh
tahanan pentanahan yang baik
diusahakan mencari tanah yang benar-
benar lembab atau basah
dari hasil penelitian yang di
lakukan, grounding yang didapat adalah
0,3 ohm dengan kedalaman elektroda dan
tanah 20m, 23m, 25m, 28m pada masing-
masing area. jadi untuk mendapatkan nilai
0,3 ohm tidak bisa ditentukan dari
kedalamannya (variatif).
DAFTAR PUSTAKA
Sumardjati,P. dkk. 2008. Teknik
Pemanfaatan Tenaga Listrik Jilid l.
Direktorat Pembinaan Sekolah
Menengah Kejuruan.
Pabla, As & Hadi, k. Abdul. 1991. Sistem
Distribusi Daya Listrik. Erlangga, Jakarta.
Hutauruk,T.S. 1991. Pengetanahan Netral
Sistem Tenaga & Pengetanahan Netral.
Erlangga, Jakarta.
Anoname.Persyaratan Umum Instalasi
Listrik 2000 ( PUIL 2000).
Anoname.http://www.kelistrikanku.com/20
16/05/elektrodapentanahan.html/elektroda
petanahan (diunduh 20 Desember 2016).

Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
ANALISA PENGOPRASIAN SECONDARY SURVEILLANCE RADAR (SSR)
DI BANDARA SUKARNO-HATTA
Oleh : Slamet Purwo Santoso1
ABSTRAK. Perkembangan sistem pelayanan lalu lintas global sedang mengalami perubahan
evolutif sebagai akibat dari pertumbuhan lalu lintas udara yang memicu perkembangan teknologi
CNS/ATM (Communication, Navigation, Surveillance / Air Traffic Management). Kondisi ini telah
mendorong terjadinya perubahan regulasi di dunia penerbangan. Sistem radar surveillance
(PSR/SSR) merupakan peralatan yang esensial dan berperan penting dalam sistem pelayanan lalu
lintas udara.
Pada penelitian ini, dilakukan analisa mengenai sistem surveilance radar sekunder SSR
(Secondary Surveillance Radar) sebagai pasangan sistem radar primer PSR (Primary Surveillance
Radar) dan memberikan gambaran tentang sistem, cara kerja dan penggunaan perangkat radar SSR.
Secondary surveillance radar (SSR) adalah suatu alat yang dapat mendeteksi keberadaan
pesawat udara pada fase take-off, en-route dan landing. Stasiun SSR didarat akan berkomunikasi
dengan alat yang ada di pesawat dan sebaliknya sehingga komunikasi tersebut terjadi sama-sama
aktif. Secondary surveillance radar (SSR) adalah alat pelengkap dari primer surveillance radar
(PSR). Secondary surveillance radar (SSR) adalah radar pengawas yang dilengkapi dengan alat
interrogator yang ada di stasiun darat radar dan transponder yang ada di pesawat. Pesawat yang
tidak dilengkapi dengan alat transponder, tidak akan dapat memberikan berbagai informasi kepada
stasiun darat radar.
ABSTRACT. The current status of the global Air Traffic Services (ATS) is evolutionary changing
because of air traffic growth that generating development on the CNS/ATM (Communication,
Navigation, Surveillance / Air Traffic Management) technology. This condition has been pushing to
the regulation changing in the aviation world. The surveillance Radar System (PSR/SSR) is
essential equipments and have an important role in the ATS system.
In this Final task, the writer intend to performed analysis on Secondary Surveillance Radar
(SSR) system collocated with Primary Surveillance Radar (PSR) system, to describe how the
system work, and function of each SSR application.
Secondary Surveillance Radar (SSR) are able to detect the aircraft in phase of take-off,
en-route and landing position. At ground SSR station will communicate to the transponder on-
board vice versa so that such an actively communication occur. Secondary radar such as SSR is to
complement the primary radar (PSR). SSR is equipped with interrogator in the ground and
transponder on board. The aircraft that were not equipped with transponders, will not be able to
provide various information to the ground radar stations. SSR can produce a variety of information
such as speed, altitude, distance, position and the aircraft code.
Index Terms : ATS (Air Traffic Services), PSR (Primary Surveillance Radar), SSR
(Secondary Surveillance Radar).
100
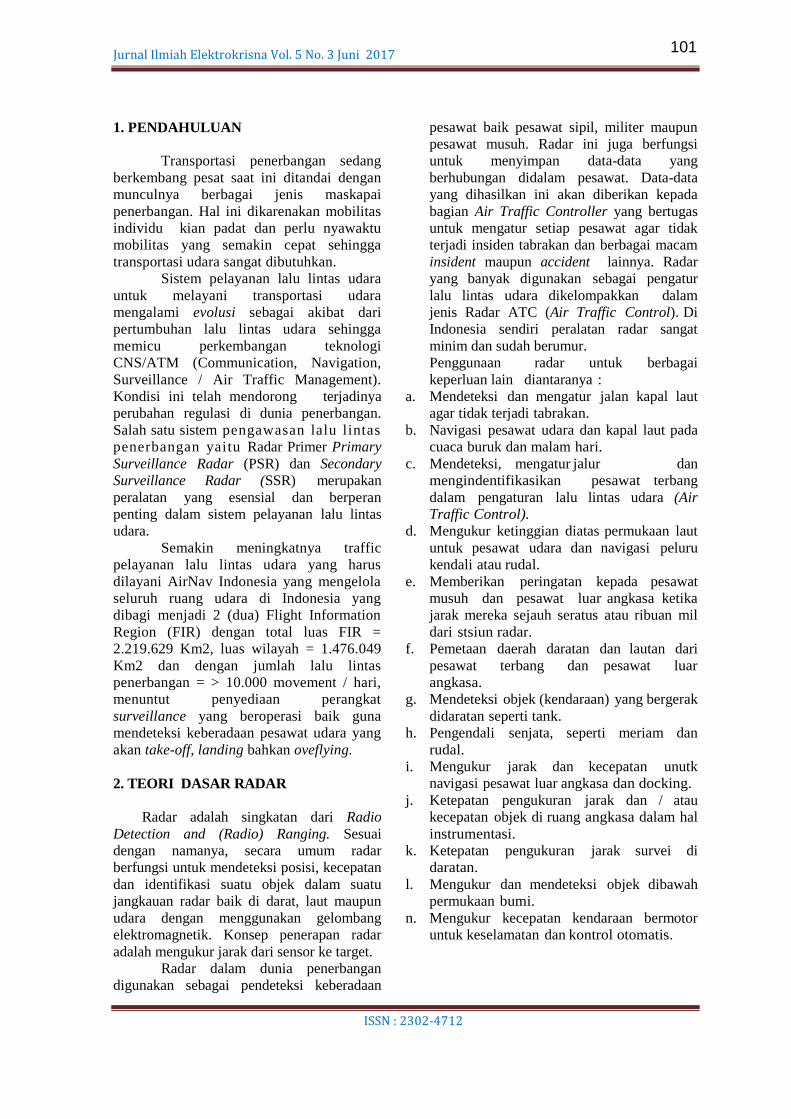
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
1. PENDAHULUAN
Transportasi penerbangan sedang
berkembang pesat saat ini ditandai dengan
munculnya berbagai jenis maskapai
penerbangan. Hal ini dikarenakan mobilitas
individu kian padat dan perlu nyawaktu
mobilitas yang semakin cepat sehingga
transportasi udara sangat dibutuhkan.
Sistem pelayanan lalu lintas udara
untuk melayani transportasi udara
mengalami evolusi sebagai akibat dari
pertumbuhan lalu lintas udara sehingga
memicu perkembangan teknologi
CNS/ATM (Communication, Navigation,
Surveillance / Air Traffic Management).
Kondisi ini telah mendorong terjadinya
perubahan regulasi di dunia penerbangan.
Salah satu sistem pengawasan lalu lintas
penerbangan yaitu Radar Primer Primary
Surveillance Radar (PSR) dan Secondary
Surveillance Radar (SSR) merupakan
peralatan yang esensial dan berperan
penting dalam sistem pelayanan lalu lintas
udara.
Semakin meningkatnya traffic
pelayanan lalu lintas udara yang harus
dilayani AirNav Indonesia yang mengelola
seluruh ruang udara di Indonesia yang
dibagi menjadi 2 (dua) Flight Information
Region (FIR) dengan total luas FIR =
2.219.629 Km2, luas wilayah = 1.476.049
Km2 dan dengan jumlah lalu lintas
penerbangan = > 10.000 movement / hari,
menuntut penyediaan perangkat
surveillance yang beroperasi baik guna
mendeteksi keberadaan pesawat udara yang
akan take-off, landing bahkan oveflying.
2. TEORI DASAR RADAR
Radar adalah singkatan dari Radio
Detection and (Radio) Ranging. Sesuai
dengan namanya, secara umum radar
berfungsi untuk mendeteksi posisi, kecepatan
dan identifikasi suatu objek dalam suatu
jangkauan radar baik di darat, laut maupun
udara dengan menggunakan gelombang
elektromagnetik. Konsep penerapan radar
adalah mengukur jarak dari sensor ke target.
Radar dalam dunia penerbangan
digunakan sebagai pendeteksi keberadaan
pesawat baik pesawat sipil, militer maupun
pesawat musuh. Radar ini juga berfungsi
untuk menyimpan data-data yang
berhubungan didalam pesawat. Data-data
yang dihasilkan ini akan diberikan kepada
bagian Air Traffic Controller yang bertugas
untuk mengatur setiap pesawat agar tidak
terjadi insiden tabrakan dan berbagai macam
insident maupun accident lainnya. Radar
yang banyak digunakan sebagai pengatur
lalu lintas udara dikelompakkan dalam
jenis Radar ATC (Air Traffic Control). Di
Indonesia sendiri peralatan radar sangat
minim dan sudah berumur.
Penggunaan radar untuk berbagai
keperluan lain diantaranya :
a. Mendeteksi dan mengatur jalan kapal laut
agar tidak terjadi tabrakan.
b. Navigasi pesawat udara dan kapal laut pada
cuaca buruk dan malam hari.
c. Mendeteksi, mengatur jalur dan
mengindentifikasikan pesawat terbang
dalam pengaturan lalu lintas udara (Air
Traffic Control).
d. Mengukur ketinggian diatas permukaan laut
untuk pesawat udara dan navigasi peluru
kendali atau rudal.
e. Memberikan peringatan kepada pesawat
musuh dan pesawat luar angkasa ketika
jarak mereka sejauh seratus atau ribuan mil
dari stsiun radar.
f. Pemetaan daerah daratan dan lautan dari
pesawat terbang dan pesawat luar
angkasa.
g. Mendeteksi objek (kendaraan) yang bergerak
didaratan seperti tank.
h. Pengendali senjata, seperti meriam dan
rudal.
i. Mengukur jarak dan kecepatan unutk
navigasi pesawat luar angkasa dan docking.
j. Ketepatan pengukuran jarak dan / atau
kecepatan objek di ruang angkasa dalam hal
instrumentasi.
k. Ketepatan pengukuran jarak survei di
daratan.
l. Mengukur dan mendeteksi objek dibawah
permukaan bumi.
n. Mengukur kecepatan kendaraan bermotor
untuk keselamatan dan kontrol otomatis.
101
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
2.1 Klasifikasi Radar
Berdasarkan bentuk gelombang, radar
terbagi dua yaitu :
1. Continous Wave / CW (gelombang
berkesinambungan) merupakan radar yang
menggunakan transmitter dan antena
penerima (receiver antenna) secara terpisah,
dimana radar ini terus menerus
memancarkan gelombang elektromagnetik.
Radar CW yang tidak termodulasi dapat
mengukur kecepatan radial target serta
posisi sudut target secara akurat. Radar CW
yang tidak termodulasi biasanya digunakan
untuk mengetahui kecepatan target dan
menjadi pemandu rudal (missile guidance).
2. Pulsed Radars/PR (Radar
Berdenyut), merupakan radar yang
gelombang elektromagnetiknya diputus
secara berirama. Frekuensi denyut radar
(Pulse Repetition Frequency / PRF) dapat
diklasifikasi menjadi 3 bagian, yaitu PRF
High, PRF Medium dan PRF Low.
2.2. Jenis radar
1. Doppler Radar
Doppler radar merupakan jenis radar yang
mengukur kecepatan radial dari sebuah
objek yang masuk ke dalam daerah
tangkapan radar dengan menggunakan efek
Doppler. Hal ini dilakukan dengan
memancarkan sinyal microwave
(gelombang mikro) ke objek lalu
menangkap refleksiny, dan kemudian
dianalisis perubahannya. Doppler radar
merupakan jenis radar yang sangat akurat
dalam mengukur kecepatan radial. Contoh
Doppler radar adalah Weather Radar yang
digunakan untuk mendeteksi cuaca.
2. Bistatic Radar
Bistatic Radar merupakan suatu jenis
sistem radar yang komponennya terdiri dari
pemancar sinyal (transmitter) dan penerima
sinyal (receiver), dimana kedua komponen
tersebut terpisah. Kedua komponen itu
dipisahkan oleh suatu jarak yang dapat
dibandingkan dengan jarak target/objek.
Objek dapat dideteksi berdasarkan sinyal
yang dipantulkan oleh objek tersebut ke
pusat antena. Contoh Bistatic Radar adalah
Passive Radar. Passive Radar adalah sistem
radar yang mendeteksi dan melacak objek
dengan proses refleksi dari sumber non-
kooperatif pencahayaan dilingkungan,
seperti penyiaran komersial dan sinyal
komunikasi.
2.3 Komponen - Komponen Radar
Ada tiga komponen utama yang
tersusun di dalam sistem radar, yaitu antena,
transmitter (pemancar sinyal) dan receiver
(penerima sinyal).
1. Antena
Antena terletak pada radar merupakan suatu
antena reflektor berbentuk piring parabola
yang menyebarkan energi elektromagnetik
dari titil fokusnya dan dipantulkan melalui
permukaan yang berbentuk parabola. Antena
radar memiliki dua kutub. Input sinyal yang
masuk dijabarkan dalam bentuk phased array
(bertingkat atau bertahap). Ini merupakan
sebaran unsur-unsur objek yang tertangkap
antena dan kemudian diteruskan ke pusat
sistem radar.
2. Pemancar sinyal (transmitter)
Pada sistem radar, pemancar sinyal
(transmitter) berfungsi untuk memancarkan
gelombang elektromagnetik melalui reflektor
antena. Hal ini dilakukan agar sinyal objek
yang berada didaerah tangkapan radar dapat
dikenali. Pada umumnya, transmitter
memiliki bandwidth dengan kapasitas yang
besar. Transmitter juga memiliki tenaga
cukup kuat, efisien, bisa dipercaya,
ukurannya tidak terlalu besar dan tidak
terlalu berat, serta mudah dalam hal
perawatannya.
3. Penerima sinyal (receiver)
Pada sistem radar, penerima sinyal (receiver)
berfungsi sebagai penerima kembali pantulan
gelombang elektromagnetik dari sinyal objek
yang tertangkap radar melalui reflektor
antena. Pada umumnya, receiver memiliki
kemampuan untuk menyaring sinyal yang
diterima nya agar sesuai dengan pendeteksian
yang diinginkan, dapat memperkuat sinyal
objek yang lemah dan meneruskan sinyal
objek tersebut ke pemroses data dan sinyal
(signal and data processor) dan kemudian
menampilkan gambarnya di layar monitor
(display).
102
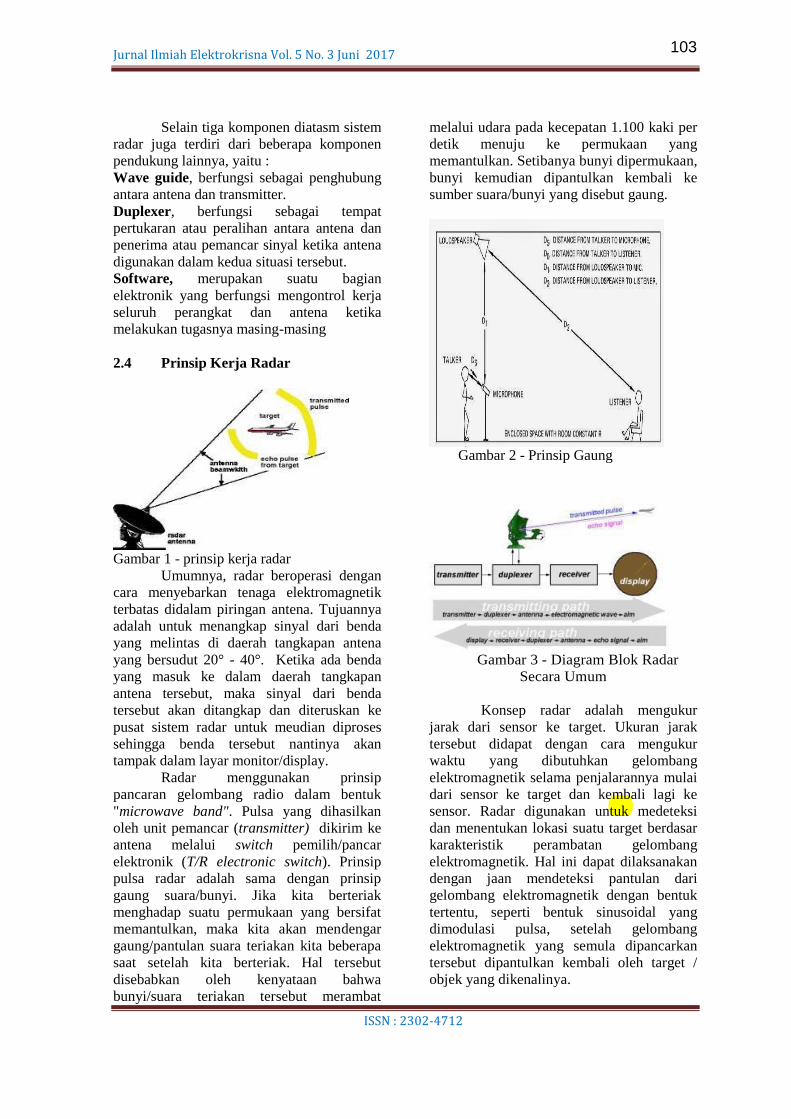
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Selain tiga komponen diatasm sistem
radar juga terdiri dari beberapa komponen
pendukung lainnya, yaitu :
Wave guide, berfungsi sebagai penghubung
antara antena dan transmitter.
Duplexer, berfungsi sebagai tempat
pertukaran atau peralihan antara antena dan
penerima atau pemancar sinyal ketika antena
digunakan dalam kedua situasi tersebut.
Software, merupakan suatu bagian
elektronik yang berfungsi mengontrol kerja
seluruh perangkat dan antena ketika
melakukan tugasnya masing-masing
2.4 Prinsip Kerja Radar
Gambar 1 - prinsip kerja radar
Umumnya, radar beroperasi dengan
cara menyebarkan tenaga elektromagnetik
terbatas didalam piringan antena. Tujuannya
adalah untuk menangkap sinyal dari benda
yang melintas di daerah tangkapan antena
yang bersudut 20° - 40°. Ketika ada benda
yang masuk ke dalam daerah tangkapan
antena tersebut, maka sinyal dari benda
tersebut akan ditangkap dan diteruskan ke
pusat sistem radar untuk meudian diproses
sehingga benda tersebut nantinya akan
tampak dalam layar monitor/display.
Radar menggunakan prinsip
pancaran gelombang radio dalam bentuk
"microwave band". Pulsa yang dihasilkan
oleh unit pemancar (transmitter) dikirim ke
antena melalui switch pemilih/pancar
elektronik (T/R electronic switch). Prinsip
pulsa radar adalah sama dengan prinsip
gaung suara/bunyi. Jika kita berteriak
menghadap suatu permukaan yang bersifat
memantulkan, maka kita akan mendengar
gaung/pantulan suara teriakan kita beberapa
saat setelah kita berteriak. Hal tersebut
disebabkan oleh kenyataan bahwa
bunyi/suara teriakan tersebut merambat
melalui udara pada kecepatan 1.100 kaki per
detik menuju ke permukaan yang
memantulkan. Setibanya bunyi dipermukaan,
bunyi kemudian dipantulkan kembali ke
sumber suara/bunyi yang disebut gaung.
Gambar 2 - Prinsip Gaung
Gambar 3 - Diagram Blok Radar
Secara Umum
Konsep radar adalah mengukur
jarak dari sensor ke target. Ukuran jarak
tersebut didapat dengan cara mengukur
waktu yang dibutuhkan gelombang
elektromagnetik selama penjalarannya mulai
dari sensor ke target dan kembali lagi ke
sensor. Radar digunakan untuk medeteksi
dan menentukan lokasi suatu target berdasar
karakteristik perambatan gelombang
elektromagnetik. Hal ini dapat dilaksanakan
dengan jaan mendeteksi pantulan dari
gelombang elektromagnetik dengan bentuk
tertentu, seperti bentuk sinusoidal yang
dimodulasi pulsa, setelah gelombang
elektromagnetik yang semula dipancarkan
tersebut dipantulkan kembali oleh target /
objek yang dikenalinya.
103

Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
2.5. Radar untuk Pengaturan Lalu
Lintas Udara (Air Traffic Services/ATC).
Sistem pengawasan lalu lintas
penerbangan adalah suatu sistem yang terdiri
dari sejumlah unsur terpadu yang meliputi
sensor, sistem pemrosesan data, hubungan
transmisi data dan layar radar. Sistem
tersebut memberikan informasi posisi (arah
dan jarak) suatu target dan informasi terkait
lainnya kepada unit Pelayanan lalu lintas
penerbangan (Air Traffic Services / ATS)
dan pesawat udara. Target yang dimaksud
bisa berupa pesawat udara, kendaraan atau
benda lainnya sedangkan informasi terkait
lainnya tersebut meliputi data identifikasi,
ketinggian, kecepatan, status dan maksud
(intend) target.
2.5.1. Primary Surveillance Radar dan
Komponennya.
Sistem PSR terdiri dari tiga blok
dasar yaitu pemancaran/transmisi,
penerimaan dan
penampilan/penyajian/display.
1. Blok Pemancaran/Transmisi
Sinyal blok transmisi
mempersiapkan energi dalam bentuk yang
sesuai untuk pemancaran dan menyebarkan
ke arah yang diinginkan. Komponen blok
transmisi adalah sebagai berikut :
a. Unit pemicu (trigger unit/master
time)
Unit pemicu adalah peralatan yang
menghasilkan output yang digunakan untuk
tindakan. Elemen ini mengawali dan
mengendalikan urut-urutan operasi yang
menghasilkan daur/siklus lengkap.
Saat ini sistem yang dapat menyelaraskan
sendiri (self-synchronized) sudah dianggap
usang dan setiap pengaturan waktu
dilakukan oleh unit pengatur waktu secara
terpisah. Didalam blok transmisi sistem
PSR, gelombang yang dihasilkan oleh unit
pemicu masih dalam bentuk rangkaian pulsa
elektrik yang sangat pendek dengan interval
yang teratur. Internal ini menunjukkan
operasi lengkap satu siklus yang dimulai
dengan pulsa berikutnya. Operasi lainnya
seperti memulai indikator sweep, bisa
dikendalikan oleh pulsa yang dibentuk di
dalam pengatur waktu baik sebelum atau
sesudah pulsa mulai dipancarkan.
b. Unit modulator
Unit modulator bertindak sebagai penyimpan
energi yang memasukan tegangan DC ke alat
pemancar dalam bentuk pulsa tegangan
tinggi yang secara efektif menyalakan
pemancar selama pengiriman pulsa.
Tegangan kemudian dimatikan sehingga
pemancar mati, sementara sistem menunggu
pantulan pulsa dari target untuk diterima
melalui alat penerima.
Pulsa yang dipasok oleh unit modulator
biasanya berbentuk persegi panjang
meskipun secara teknis sudut-sudutnya tidak
persegi. Pulsa ini dibentuk dan dialirkan ke
pemancar dengan interval yang teratur.
Fungsi unit modulator adalah membentuk
pulsa dengan amplitude yang benar dan
dengan waktu yangbenar pula serta
meneruskannya ke pemanca.
c. Unit Pemancar
Fungsi unit pemancar (Tx) adalah
menghasilkan energi RF (radio frequency)
yang dipasok ke antena untuk dipancarkan
ke udara. Plate Voltage biasanya diteruskan
ke tabung sinar katoda dalam bentuk pulsa
negatif yang berjumlah ribuan amplitudo
volt, dan lama waktu yang bervariasi pada
sistem radar yang berbeda mulai dari satu
mikrodetik sampai beberapa mikrodetik.
Tabug pemancar biasanya suatu megatron
(tabung vakum dimana arus elektron
dikendalikan oleh gaya magnet untuk
menghasilkan gelombang radio dengan
frekuensi pendek) atau klystron (tabung
elektronika yang menggunakan isolasi arus
listrik untuk menghasilkan dan memperkuat
frekuensi ultra tinggi seperti sinyal TV).
Unit pemancar hanya mengirimkan suatu
interogasi, kemudian menjaid pasif dan
menunggu pantulan yang diukur secara
akurat skala dan basis waktunya.
2. Blok penerimaan (Reception Block)
Sinyal blok penerimaan mendeteksi energi
yang dipantulkan oleh target yang berada di
dalam jangkauan operasional sistem radar.
energi elektromagnetik yang dipantulkan
biasanya sangat lemah ketika mencapai
antena, oleh karena itu menyebabkan hanya
sinyal lemah yang ada di antena. Sebelum
bisa ditampilkan, sinyal yang lemah harus
diperkuat dan diperlakukan sebagaimana
mestinya.
104
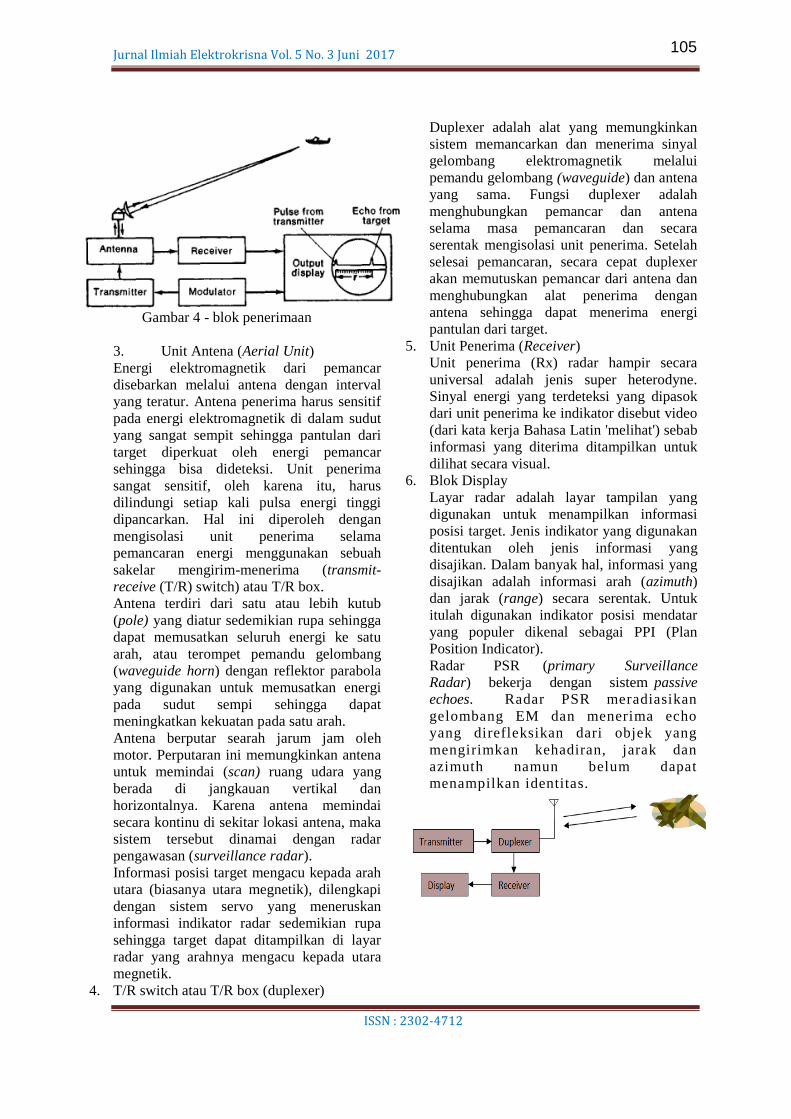
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Gambar 4 - blok penerimaan
3. Unit Antena (Aerial Unit)
Energi elektromagnetik dari pemancar
disebarkan melalui antena dengan interval
yang teratur. Antena penerima harus sensitif
pada energi elektromagnetik di dalam sudut
yang sangat sempit sehingga pantulan dari
target diperkuat oleh energi pemancar
sehingga bisa dideteksi. Unit penerima
sangat sensitif, oleh karena itu, harus
dilindungi setiap kali pulsa energi tinggi
dipancarkan. Hal ini diperoleh dengan
mengisolasi unit penerima selama
pemancaran energi menggunakan sebuah
sakelar mengirim-menerima (transmit-
receive (T/R) switch) atau T/R box.
Antena terdiri dari satu atau lebih kutub
(pole) yang diatur sedemikian rupa sehingga
dapat memusatkan seluruh energi ke satu
arah, atau terompet pemandu gelombang
(waveguide horn) dengan reflektor parabola
yang digunakan untuk memusatkan energi
pada sudut sempi sehingga dapat
meningkatkan kekuatan pada satu arah.
Antena berputar searah jarum jam oleh
motor. Perputaran ini memungkinkan antena
untuk memindai (scan) ruang udara yang
berada di jangkauan vertikal dan
horizontalnya. Karena antena memindai
secara kontinu di sekitar lokasi antena, maka
sistem tersebut dinamai dengan radar
pengawasan (surveillance radar).
Informasi posisi target mengacu kepada arah
utara (biasanya utara megnetik), dilengkapi
dengan sistem servo yang meneruskan
informasi indikator radar sedemikian rupa
sehingga target dapat ditampilkan di layar
radar yang arahnya mengacu kepada utara
megnetik.
4. T/R switch atau T/R box (duplexer)
Duplexer adalah alat yang memungkinkan
sistem memancarkan dan menerima sinyal
gelombang elektromagnetik melalui
pemandu gelombang (waveguide) dan antena
yang sama. Fungsi duplexer adalah
menghubungkan pemancar dan antena
selama masa pemancaran dan secara
serentak mengisolasi unit penerima. Setelah
selesai pemancaran, secara cepat duplexer
akan memutuskan pemancar dari antena dan
menghubungkan alat penerima dengan
antena sehingga dapat menerima energi
pantulan dari target.
5. Unit Penerima (Receiver)
Unit penerima (Rx) radar hampir secara
universal adalah jenis super heterodyne.
Sinyal energi yang terdeteksi yang dipasok
dari unit penerima ke indikator disebut video
(dari kata kerja Bahasa Latin 'melihat') sebab
informasi yang diterima ditampilkan untuk
dilihat secara visual.
6. Blok Display
Layar radar adalah layar tampilan yang
digunakan untuk menampilkan informasi
posisi target. Jenis indikator yang digunakan
ditentukan oleh jenis informasi yang
disajikan. Dalam banyak hal, informasi yang
disajikan adalah informasi arah (azimuth)
dan jarak (range) secara serentak. Untuk
itulah digunakan indikator posisi mendatar
yang populer dikenal sebagai PPI (Plan
Position Indicator).
Radar PSR (primary Surveillance
Radar) bekerja dengan sistem passive
echoes. Radar PSR meradiasikan
gelombang EM dan menerima echo
yang direfleksikan dari objek yang
mengirimkan kehadiran, jarak dan
azimuth namun belum dapat
menampilkan identitas.
105

Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Pada sistem SSR di ground terdapat
pemancar / penerima yang disebut
Interrogator, sedang di pesawat udara
terdapat pemancar / penerima yang disebut
Transponder.
Frekuensi kerja peralatan SSR
adalah :
- Interrogator mode menggunakan
frekuensi carrier 1030 MHz
- Transponder code menggunakan
frekuensi carrier 1090 MHz
Dengan adanya target yang aktif
dan dengan frekuensi carrier diatas yang
berbeda, maka pada SSR kita dapat
mendeteksi pesawat yang cukup jauh yaitu
sekitar 200 NM. Sehingga petugas ATC
dapat mengetahui keberadaan atau posisi
suatu pesawat. Apabila pesawat telah
mencapai batas maksimum yaitu lebih dari
200 NM, maka stasiun darat yang ada di
bandara tidak akan bisa mendeteksi atau
menampilkan nya dalam layar display.
Sehingga tugas ATC untuk selalu
mengawasi setiap pesawat yang ada dalam
layar display dan berkomunikasi dengan
baik melalui voice communication.
a. Jarak jangkauan SSR
Jarak jangkau Secondary Surveillance
Radar ke pesawat udara adalah 200 NM.
Jarak jangkau diukur dalam satuan
Nautical Mile (NM) dimana 1 NM = 1,852
kilometer.
1 NM = 1.852 km
200 NM = 370 km
Interval T pada interrogasi pada
umumnya sebesar 2,5 mS, dimana untuk
jarak maksimum secara teoritis :
r = C T / 2...................(1)
dimana r = jarak maksimum
C = kecepatan cahaya 3.108 m/s
T = pulse repetition time (PRT)
PRT yaitu selang waktu antara satu
pulsa dengan pulsa berikut nya yang
disebut juga satu siklus kerja PRT = 1/PRF
Atau T = 1/PRF dan
PRF = 1/T
Jadi untuk mencari T maka dapat
diperoleh dengan menggunakan rumus :
T = 1 / PRF
dimana nilai PRF adalah T = 1
= 1 / 400 = 2,5 ms
b. Antena Radar
Ukuran antena radar merupakan
parameter penting untuk meningkatkan kerja
radar. Pada dasarnya antena radar hanya
memiliki main lobe, sehingga daya yang
ditransmisikan terfokus pada objek yang
dituju. Pada prakteknya keadaan tersebut
tidak dapat tercapat dikarenakan sifat dasar
antena tersebut. Kondisi ini akan
berpengaruh terhadap jauh dekatnya range
radar yang dapat dicapai.
Untuk mendapatkan range radar yang
luas maka antena perlu diperhatikan besar
serta tinggi antenanya, karena :
a. Antena yang besar akan lebih memusatkan
daya yang ditransmisikan dalam bentuk
berkas yang sempit.
b. Antena yang besar mempunyai aperture area
yang luar sehingga daya tangkap terhadap
sinyal pantulan akan lebih besar.
Perubahan jarak jangkau (range)
radar akibat pengaruh antena tersebut akan
mempengaruhi nilai waktu untuk radar
melakukan suatu interogasi. Secara garis
besar range untuk radar sekunder dihitung
sesuai dengan rumus :
............................. (2)
dimana :
R = Range Radar (meter)
c = Cepat rambat cahaya (3 x 10 m/s)
T = Waktu propagasi sinyal (s)
Besarnya daya yang diradiasikan
secara efektif oleh kombinasi transmitter dan
antena dalam arah dari main beam disebut
Effective Radiated Power atau ERP. Daya
ini diradiasikan secara isotropic untuk
menghasilkan efek yang sama sebagaimana
diberikan oleh transmitter dan antena, dengan
arah gain digambarkan dalam rumus berikut :
ERP = PT GT ......................................... .(3)
dimana :
ERP = Daya Radiasi Efektif Radar (watt)
PT = Daya Efektif yang disalurkan ke
antena (watt)
GT = Gain antena transmitter.
Kerapatan Daya atau Power
Density didefinisikan sebagai daya yang
dipancarkan oleh antena per unit daerah
(density) pada jarak (R) dari antena tersebut.
Jika pulsa yang dipancarkan memiliki Peak
106
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Power (PT) dan antena Omnidirectional
(isotropic) maka persamaannya adalah : 2 ............................(4)
Dimana :
PD = Kerapatan Daya (watt/m2)
Pt = Daya yang ditransmisikan (watt)
R = Jarak dari transmitter ke objek (m)
Prinsip antena radar yang ideal
adalah merupakan antena yang memiliki
kecerahan pada suatu titik tertentu, sehingga
daya yang diradiasikan akan maksimal.
Berdasarkan karakteristik tersebut, maka
antena radar merupakan antena directive
sehingga kerapatan dayanya dinyatakan
dalam :
2 x G ................. (5)
dimana :
G = Gain antena sepanjang arah objek.
b. Lebar Pulsa
Lebar pulsa merupakan panjang waktu
daya iluminasi saat kondisi ON untuk
setiap transmisi. Besar kecilnya pulsa dapat
mempengaruhi kerja suatu radar, terutama
dalam resulosi range target pada radar
tersebut. Jika radar pulsa sempit maka :
a. Radar akan mampu membedakan
beberapa target yang letaknya berdekatan
(High Resolution).
b. Diperlukan receiver dengan
bandwith lebar untuk dapat menampung
semua harmonik pulsa tersebut
c. Daya Pantulan
Daya pantulan yang diterima radar (Pr)
berbanding terbalik dengan pangkat 4
range radar (R). Jadi jika range radar
dinaikkan 2 kali, maka daya yang
dipancarkan radar (Pt) harus dinaikkan 16
kali.
d. Pulse Repetition Frequency
Pulse Repetition Frequency merupakan
sejumlah pulsa iluminasi yang
ditransmisikan per detik. Nilainya tidak
boleh kecil karena akan menyebabkan
berkurangnya jumlah pulsa yang mengenai
target, akibatnya pulsa-pulsa pantulan akan
sulit dideteksi. Hal ini akan banyak
berpengaruh pada integration process, yaitu
proses penjumlahan pulsa-pulsa yang
ditembakkan ke target, hingga dengan
menjumlahkan pulsa-pulsa tersebut gema
yang diterima efektif lebih besar.
e. Daya Rata-rata
Daya rata-rata adalah daya yang
diemisikan transmitter radar secara rata-
rata sepanjang waktu. Untuk beberapa
kasus daya ini lebih penting daripada peak
power untuk mendeteksi target.
f. Noise Figure (NF)
Noise Figure/ Noise factor diukur dari
thermal noise yang dihasilkan pada
receiver dibandingkan noise yang
dihasilkan receiver yang sempurna pada
suhu 29°
K . Jika noise figure diperkecil
maka Rmax akan semakin besar, jadi
receiver harus mempunyai NF sekecil
mungkin. Alat penentu nilai NF adalah
bagian RF Amplifier.
g. Luas Efektif Target
Luas Efektif Target adalah area target yang
dapat memenuhi atau menghasilkan daya
pantulan (gema) yang dapat dideteksi balik
oleh radar. Faktor- faktor seperti arah
tampilan, frekuensi radar, ukuran fisik,
bentuk geometri objek, dan komposisi dari
objek dapat mempengaruhi nilai nominal
radar cross section dari target. Radar cross
section target diketahui tergantung ukuran
target.
h. Faktor - faktor lain.
Faktor-faktor lain yang mempengaruhi
unjuk kerja radar adalah seperti redaman
atmosfir, temperatur, dan daerah dimana
radar dioperasikan (dataran atau
pegunungan). Redaman atmosfir
disebabkan oleh adanya absorpsi oleh gas-
gas diatmosfir dan penghamburan oleh
partikel di atmosfir.
2.2.5. Perbedaan Primary Surveillance Radar
(PSR) dan Secondary Surveillance Radar
(SSR)
Radar ada beberapa macam dan yang
umum digunakan di Bandar Udara adalah
Primary Surveillance Radar dan Secondary
Surveillance Radar (SSR). Kedua jenis radar
baik PSR maupun SSR mempunyai cara
kerja berbeda. Pada PSR sifatnya aktif dan
pesawat yang ditargetkan sifatnya pasif.
Karena PSR hanya menerima pantulan
107
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
gelombang radio dari refleksi pesawat
tersebut (echo). Sedangkan pesawat itu
sendiri tidak "tahu-menahu" dengan kegiatan
radar di bawah. Pada SSR, baik radar
maupun pesawat kedua-duanya aktif. Hal ini
dapat dilakukan karena pesawat terbang
dilengkapi dengan transponder. Pesawat
pesawat yang tidak dilengkapi transponder
tidak akan dapat dilihat pada radar scope
seperti identifikasi pesawat, ketinggiannya
dan lain-lain.
2.5.2. Kendala saat pengoperasian
Secondary Surveillance Radar (SSR)
Beberapa kendala yang mungkin
timbul pada pengoperasian radar sekunder
diantaranya :
1. Garble
Garble dapat terjadi jika dua pesawat atau
lebih berada berdekatan dan diadakan
pemisahan (separation) oleh petugas ATC
sejauh 5 NM. Keadaan ini menyebabkan
munculnya simbol dan kode pesawat yang
tumpang tindih pada layar display.
2. Capture effect
Dapat terjadi karena transponder hanya
mampu memberikan jawaban bagi satu
interrogation pada satu waktu yang tepat.
3. Sinyal multipath
Disebabkan banyaknya jalur yang dapat
ditempuh oleh sinyal antara stasiun radar
dengan pesawat udara dan sebaliknya. Jalur
utama sinyal adalah garis lurus atau yang
lebih dikenal dengan istilah line of sight.
Jalur lain/tambahan dapat timbul karena
adanya permukaan bumi seperti gedung-
gedung tinggi, tiang antenna dan bangunan-
bangunan lain yang berdekatan letaknya
dengan stasiun radar. Sinyal pantulan ini
dapat memperlemah sinyal masukan bagi
perangkat penerima.
4. FRUIT (False Replies from
Unsynchronised Interrogator Transmissions)
Dapat terjadi bila dua stasiun radar yang
letaknya berdekatan, misalnya A dan B saat
bersamaan memberikan interrogation kepada
sebuah pesawat terbang yang sama. Maka
akan terjadi kemungkinan jawaban yang
seharusnya untuk stasiun A diterima oleh B,
atau sebaliknya. Hal ini dapat terjadi karena
jangkauan radar (coverage) dari kedua
stasiun tersebut saling berpotongan (overlap)
5. Diskriminasi jarak (Range descrimination)
Diskriminasi jarak adalah kemampuan radar
untuk membedakan jarak pemisahan sasaran
yang terletak pada baringan yang sama dan
satu sama lain berdekatan.
Kendala-kendala tersebut diatas pada
prinsipnya disebabkan oleh dua masalah
pokok, yaitu :
1. Kesalahan pendeteksian oleh transponder
pesawat udara.
2. Kesalahan data pada pulsa jawaban yang
diterima oleh stasiun radar.
3. ANALISA SSR BANDARA SOETTA
Teknik penginderaan dengan
menggunakan sistem Secondary Surveillance
Radar (SSR) adalah teknik surveillance yang
dikembangkan untuk mengatasi masalah
umum yang sering terjadi pada sistem
Primary Surveillance Radar (SSR).
Masalah tersebut adalah :
a. Tidak dapat memberikan data
identitas secara langsung;
b. Tidak terdapat indikator kondisi tertentu
seperti kondisi darurat, radio rusak dan
sejenisnya;
c. Jangkauan radar ditentukan oleh kekuatan
pemancar;
d. Sering kali menampilkan target palsu;
e. Pantulan (echo) ditentukan oleh posisi dan
konfigurasi pesawat udara;
f. Seluruh target diam dianggap sebagai clutter;
g. Prosedur identifikasi lebih rumit dan makan
waktu;
h. Tidak terdapat informasi ketinggian;
i. Prosedur transfer rumit;
j. Jauh lebih mahal dibanding SSR;
k. Update rate lebih lama dibanding SSR yaitu
antara 4 sd 12 detik;
Pada Bab ini akan dihitung
parameter-parameter yang mempengaruhi
kinerja SSR berdasarkan dara SSR Thomson
RS - 770 yang dioperasi di Bandara
Soekarno-Hatta untuk melakukan fungsi
surveillance antara lain :
a. Jarak jangkauan sinyal SSR;
b. Waktu Interogasi (Interrogation Time)
c. Daya Radiasi Efektif (Effective Radiated
Power);
d. Kerapatan Daya (Power Density).
108
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Sistem radar sekunder ranging time
didefinisikan berbeda dengan pada radar
primer. Pada sistem radar primer ranging
time didefinisikan sebagai waktu
pengiriman sinyal ditambah waktu
penerimaan gema. Sedangkan pada sistem
radar sekunder, ranging time dapat
didefinisikan sebagai waktu interogasi
ditambah waktu reply. Pada sistem radar
primer waktu pengiriman sinyal dengan
waktu penerimaan dapat diasumsikan sama
besarnya, sedangkan pada sistem radar
sekunder waktu interogasi dan waktu
reply memiliki durasi waktu berbeda.
Hal ini dipengaruh besarnya data yang
terkandung dalam sinyal interogasi dan
sinyal reply.
a). Jarak jangkauan sinyal SSR
Dengan adanya target yang aktif dan
dengan frekuensi carrier yang berbeda
seperti interrogator 1030 MHz dan
transponder 1090 MHz, maka pada SSR
kita akan dapat mendeteksi pesawat yang
cukup jauh.
Jarak jangkau SSR kepesawat terbang
adalah 200 NM.
Power yang diperlukan untuk pemancarnya
adalah 2,5 Kwatt.
1 NM = 1.825 km
200 NM = 370 km
Interval T pada interrogasi pada umumnya
adalah kira-kira 2,5 mS, dimana untuk
jarak maksimum secara teoritis :
r = C T / 2
dimana r = jarak maksimum
C = kecepatan cahaya 3. 108 m/s
T = pulse repetition time (PRT)
PRT yaitu selang waktu antara satu pulsa
dengan pulsa berikut nya yang disebut pula
satu siklus kerja
PRT = 1 / PRF
atau
T = 1 / PRF
dan PRF = 1 / T
jadi, untuk mencari T dapat diperoleh
dengan menggunakan rumus :
T = 1 / PRF
Dimana nilai dari PRF adalah 400 jadi :
T = 1 / PRF
= 1 / 400
= 2,5 mS
Maka dapat diperoleh hitungan secara
rumus untuk jarak maksimum SSR untuk
mendeteksi pesawat terbang adalah
menggunakan persamaan (2.1) :
Untuk T = 2,5 mS
r = C T / 2
= 3.108 m/s x 2,5 . 10-3 s / 2
= 375 km
dari perhitungan diatas dapat dilihat bahwa
kemampuan jangkauan maksimum dari
sinyal SSR untuk mendeteksi pergerakan
pesawat adalah sejauh 375 km.
b). Waktu Interogasi (Interrogation Time)
1). Range Minimum
Range minimum= 0,5 Nm
1 Nm= 1,852 Km
Range Minimum= 0,5 x 1,852 Km = 926 m
Waktu Interogasi saat Range Minimum :
T Interogasi =
T Interogasi = 3,0867 ms
2). Range Maksimum
Range Maksimum= 250 NM
1 NM= 1,852 Km
Range Maksimum= 250 x 1, 852 Km
= 463 Km
Waktu Interogasi saat Range Maksimum :
T Interogasi =
T Interogasi= 1,5433 ms
Hasil dari perhitungan diatas dapat dilihat
pengaruh range terhadap waktu interogasi
bahwa makin jauh jarak objek terhadap
transmitter, maka makin besar pula waktu
interogasi yang dibutuhkan. Besarnya
waktu interogasi akan mempengaruhi
keakuratan pergerakan pesawat yang
ditampilkan pada layar radar. Jadi apabila
waktu interogasi kecil maka setiap
pergerakan pesawat dapat dideteksi dengan
lebih cepat, sehingga akan memberikan
gambaran yang lebih jelas tentang
pergerakan pesawat seperti yang
ditampilkan di layar radar. Namun jika
waktu interogasi semakin besar, maka
pergerakan pesawat yang ditampilkan pada
layar radar tidak terlalu akurat.
c). Pada sistem radar, daya yang diradiasikan
109
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
oleh antena radar harus dapat fokus hanya
pada objek yang dituju, sehingga daya
maksimum akan diradiasikan sepenuhnya
ke arah objek yang diinginkan. Selain itu
keterarahan daya pancar pada suatu arah
tertenti akan menghindari adanya proses
pendeteksian objek yang tidak diinginkan,
sehingga objek yang didapat pada display
radar sesuai dengan kebutuhannya. Daya
yang dapat diradiasikan secara efektif oleh
kombinasi transmitter / antena dalam arah
main beam disebut Effective Radiated
Power / ERP . Maka besarnya kerapatan
daya gain maksimum dapat dihitung
menggunakan persamaan (2.3) :
- Karakteristik SSR Thomson RS - 770 :
PT = 2,5 kW = 2500 watt
GT = 7 dBi
ERP = 2500 x 7
ERP = 17,5 kW
Besarnya daya yang diradiasikan secara
tidak langsung akan mempengaruhi sistem
kerja radar. Hal in terutama berkaitan
dengan bisa tidak nya transponder
memberikan sinyal jawaban. Karena sinyal
dipropagasikan dalam line of sight
sehingga dalam perjalanan gelombang
dapat mengalami beberapa loss yang
menyebabkan level daya menurun,
sehingga daya yang sampai tidak dapat
memenuhi syarat untuk memberitahukan
bahwa pesawat tersebut diberikan suatu
sinyal interogasi, hal tersebut berpengaruh
kepada keakuratan terhadap deteksi
pesawat pada layar radar. Seharusnya
secara teori, pesawat tersebut dapat
terdeteksi, namun karena pada prakteknya
daya yang ditransmisikan tidak tepat, maka
hal tersebut diatas dapat terjadi.
d). Selain daya radiasi efektif,
kerapatan daya antena juga dapat
mempengaruhi kinerja radar. Kerapatan
daya (power density) dapat dihitung
dengan persamaan (2.4) sehingga :
- Karakteristik SSR Thomson RS - 770
PT = 2,5 kW = 2500 watt
GT = 7 dBi
1). Range Minimum
Range minimum= 0,5 Nm
1 Nm= 1,852 Km
Range Minimum= 0,5 x 1,852 Km = 926 m
Power Density saat Range minimum :
PD =
x 7
PD=1,6249 mW/m2
2). Range Maksimum
Range Maksimum= 250 NM
1 NM= 1,852 Km
Range Maksimum= 250 x 1, 852 Km= 463
Km
Power Density saat Range Maksimum
PD =
x 7
PD= 0,0065 mW/ m2
Seperti terlihat dari data-data perhitungan
tersebut maka semakin jauh jarak suatu
objek dari transmitter radar akan
menyebabkan kerapatan dayanya semakin
mengecil. Hal ini disebabkan karena loss
yang terjadi pada medium propogasi yang
disebabkan oleh perubahan dengan luas
medium dinyatakan dalam 4πR 2
makin
membesar. Karena daya yang dipancarkan
berbanding terbalik dengan kuadrat jarak,
dapat dilihat bahwa kerapatan daya dengan
daya transmisi tetap dan jarak yang terus
meningkat, akan menyebabkan nilai
nominalnya semakin mengecil. Saat
keadaan pesawat semakin jauh maka
kerapatan daya semakin berkurang.
4. KESIMPULAN
Berdasarkan hasil analisia data
yang telah dilakukan, maka dapat
disimpulkan beberapa hal sebagai berikut :
1. Secondary Surveillance Radar (SSR)
Thomson RS 770 digunakan untuk
memperkuat pelayanan Primary
Surveillance Radar (PSR) karena
jangkauan radar jauh lebih luas dari radar
primer (PSR) yang selama ini telah
digunakan di Bandara Soekarno - Hatta.
2. Sistem surveillance pada SSR Merk
Thomson RS 770 masih terdapat
kekurangan karena kerapatan daya yang
semakin kecil saat pesawat berada jauh
dari transmitter interrogator menyebabkan
data ketinggian pesawat, kemungkinan
target palsu atau kesalahan deteksi kode
110
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
SSR dll juga berpotensi mengalami
kesalahan deteksi.
3. SSR Merk Thomson RS 770 mempunyai
waktu interogasi saat range minimum
sebesar 3,0867 mikro detik dan waktu
interogasi 1,5433 mili detik pada saat
range maksimum.
4. Dengan gain antena maksimum sebesar 7
dBi, maka daya efektif yang dihasilkan
sebesar 17,5 kW. Kerapatan daya (power
density) pada saat range minimum adalah
1,6249 mW/m2 dan saat range maksimum
2
5. DAFTAR PUSTAKA
1. Abdullah Agus Ma'rufi dan Moch. Abdul
Azis, 2007. Peranan Radar Surveillance
(PSR/SSR) dalam Pelayanan Lalu Lintas di
Indonesia dan ADS-B sebagai Sistem
Alternatif. Prosiding Seminar Radar
Nasional 2007.
2. Doc. GMST, September 2007, Guidance
Manterial on Comparison of Surveillance
Technologies (GMST), 1st - edition 1.0,
Montreal : ICAO Secretary General.
3. Abdul Mueed, Radar Basics. Course
Material for Deparmental Promotion
Examination (DPE).
4. Marconi Wireless, Lesson SSR. (online).
(http://slideshare.net/yc2levgmail/lesson-
ssr, diakses tgl 25 Januari 2017: 23.30
WIB).
5. William L. Melvin, James A. Scheeer,
Principles of Modern Radar - Radar
Application.....
6. Doc. 8071 Vol. III, 1999, Manual on
Testing of Radio Navigation Aids, Testing
of Surveillance Radar System, 1st Edition,
Montreal: ICAO Secretary General.
7. Aminarno Budi Pradana, 2014. Sistem
Pengawasan Lalu Lintas Penerbangan
Sipil. Cetakan ke-1, PT. RajaGrafindo
Persada, Jakarta.
8. Mawaddah, 2010. Study tentang Secondary
Surveillance Radar (SSR) untuk
menentukan Berbagai Informasi Pesawat
Terbang di PT. Angkasa Pura II. .......
111

Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
ANALISA KINERJA JARINGAN LAN
MENGGNAKAN METODE QUALITY of SERVICE (QoS)
(Studi Kasus : PT. Transportasi Gas Indonesia Di Jambi)
Oleh : Sri Hartanto1
Abstrak - PT. Transportasi Gas Indonesia adalah perusahaan yang bergerak di
bidang minyak dan gas, kususnya sebagai penyalur gas alam. Dalam pengoprasiannya
memiliki beberapa lapangan gas yang cukup komplek. Di beberapa lapangan gas
menggunakan jaringan Wireless Local Area Network (WLAN). Untuk mengetahui
seberapa besar kinerja (performance) jaringan di PT.Transportasi Gas Indonesia, maka
harus dilakukan sebuah pengujian dan analisa terhadap kinerja jaringan dengan berdasrkan
pada quality of Service (QoS). QoS adalah kemampuan dalam menjamin pengiriman arus
data jaringan atau kumpulan dari berbagai kriteria kemampuan yang menentukan tingkat
kepuasan penggunaan suatu jaringan.Parameter QoS terdiri dari bandwidth, delay dan
packet loss.
Kata Kunci :Wireles, Local Area Network (WLAN), Quality of Service (QoS), Bandwidth,
Delay, Packet Loss.
Abstract - PT. Transportation Gas Indonesia is a company engaged in the oil and
gas, specialy as a natural gas distributor. In operasionality has some fairly complex gas
field. In some of the gas field using a network of Wireless Local Area Network (WLAN). To
find out how much the performance (performance) PT.Transportasi Gas network in
Indonesia, it should be an examination and analysis of network performance with base on
quality of service (QoS). QoS is the ability to assure delivery of network data flow or a set
of criteria that determine the level of satisfaction capability of using a jaringan.Parameter
QoS is composed of bandwidth, delay and packet loss.
Keyword :Wireles, Local Area Network (WLAN), Quality of Service (QoS), Bandwidth,
Delay, Packet Loss.
1. PENDAHULUAN
1.1 Latar Belakang Masalah
Perkembangan teknologi jaringan
komputer mengalami peningkatan yang
sangat pesat, bersamaan dengan semakin
meningkatnya permintaan kebutuhan
yang berkelanjutan untuk dapat berbagai
informasi elektronik. Dengan
perkembangan tersebut telah mendorong
pertumbuhan dari berbagai jenis system
jaringan data local (Local Area Network)
yang tersebar secara geografis, kemudian
bergabung membentuk system jaringan
yang lebih luas yang di sebut dengan
jaringan MAN (Metropolitan Area
Network).
Penelitian ini menganalisis kinerja
dari jaringan internet yang sudah di
112
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
pasang menggunakan topologi bintang
menggunakan software Axence Net Tools,
dengan software ini maka admin dapat
memonitor jaringan dan menguji
jaringan.
1.2 Perumusan Masalah
Berdasarkan pada latar belakang
yang diuraikan di atas, maka perumusan
masalah yang dapat di bahas dalam
pembuatan penelitian ini adalah sebagi
berikut :
1. Bagaimana cara
mengimplementasikan perancangan
atau design dan simulasi, sehingga
sistem dapat berjalan sesuai dengan
harapan.
2. Bagaimana menganalisis kinerja
jaringan LAN dengan mengukur
parameter bandwidth, delay, packet
loss dengan menggunakan metode
Quality of Services (QoS) dan
Realibility, Maintainability and
Availability (RMA) pada sistem
jaringan yang di terapkan.
1.3 Tujuan Dan Manfaat
Penelitian
Adapun tujuan dari penulisan
penelitian ini adalah untuk menghasilkan
sebuah jaringan yang berkualitas dengan
melakukan pengujian terhadap kinerja
layanan jaringan di PT.Transportasi Gas
Indonesia lapangan gas wilayah Jambi.
Dengan melakukan penelitian ini
diharapkan penulis dan pihak perusahaan
memperoleh masukan-masukan dan
manfaat, yang dapat dijadikan acuan jika
terjadi masalah dikemudian hari. Adapun
manfaat yang didapatkan dari penelitian
ini antara lain adalah :
1. Bagi karyawan PT.Transportasi Gas
Indonesia adalah supaya bisa
mengetahui kualitas jaringan yang di
terapkan, baik di lingkungan kantor,
lapangan gas maupun ruang kontrol.
2. Bagi penulis manfaat yang dapat di
ambil adalah sebagai bahan
pembelajaran cara menjalankan
aplikasi Axence Net Tools dan
mengetahui standar perangkat yang
digunakan di lingkuan industri
minyak dan gas.
1.4 Batasan Masalah
Untuk mencapai sebuah penelitian
yang diharapkan, maka penulis ingin
memfokuskan penelitian ini melalui
batasan masalah sebagai berikut :
1. Hanya membahas prinsip kerja LAN
dengan topologi star.
2. Hanya melakukan pengukuran pada
parameter bandwidth, delay dan
packet loss menggunakan aplikasi
Axence Net Tools versi 5.
2. METODE PENELITIAN
2.1 Perancangan Sistem Jaringan
Perancangan atau design adalah
suatu hal yang wajib dilakukan sebelum
tahapan pemasangan. Hal ini dilakukan
karena memiliki banyak tujuan yang
sangat penting dan sangat menentukan
dalam proses kelancaran pemasangan dan
proses operasi. Salah satu hal yang sangat
penting adalah sebagai dasar perhitungan
biaya dan sebagai dasar sistem
pengoperasian.
113
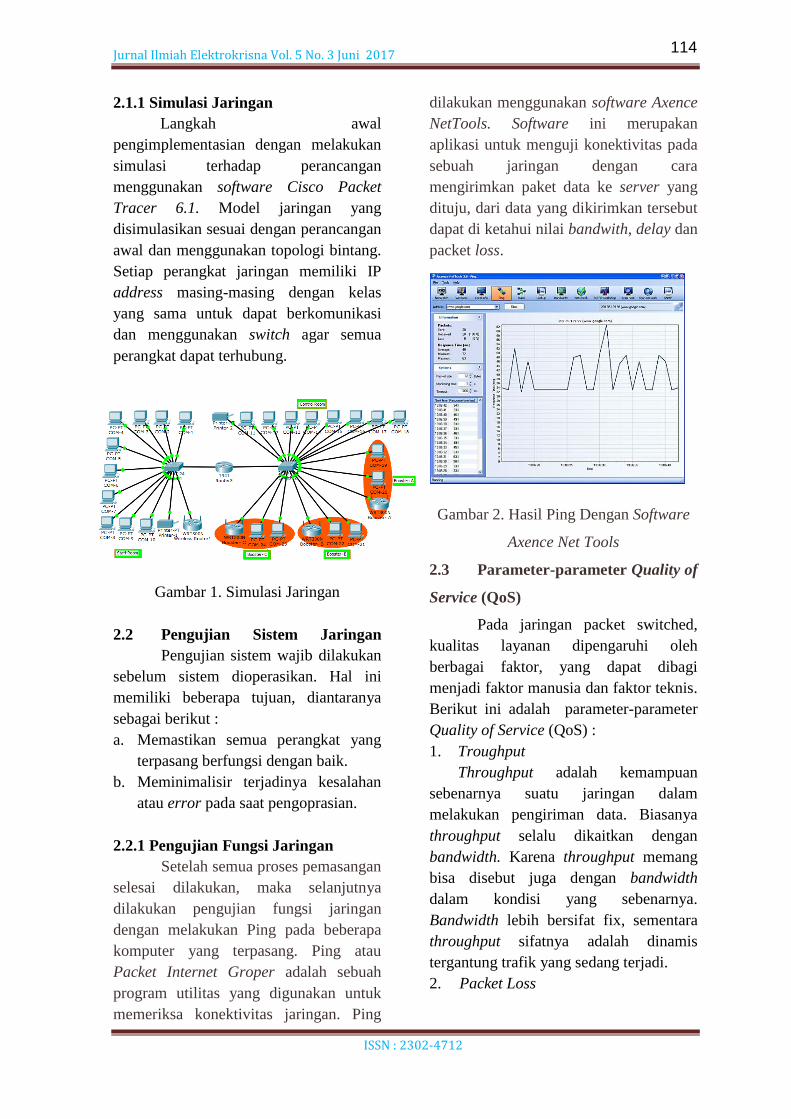
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
2.1.1 Simulasi Jaringan
Langkah awal
pengimplementasian dengan melakukan
simulasi terhadap perancangan
menggunakan software Cisco Packet
Tracer 6.1. Model jaringan yang
disimulasikan sesuai dengan perancangan
awal dan menggunakan topologi bintang.
Setiap perangkat jaringan memiliki IP
address masing-masing dengan kelas
yang sama untuk dapat berkomunikasi
dan menggunakan switch agar semua
perangkat dapat terhubung.
Gambar 1. Simulasi Jaringan
2.2 Pengujian Sistem Jaringan
Pengujian sistem wajib dilakukan
sebelum sistem dioperasikan. Hal ini
memiliki beberapa tujuan, diantaranya
sebagai berikut :
a. Memastikan semua perangkat yang
terpasang berfungsi dengan baik.
b. Meminimalisir terjadinya kesalahan
atau error pada saat pengoprasian.
2.2.1 Pengujian Fungsi Jaringan
Setelah semua proses pemasangan
selesai dilakukan, maka selanjutnya
dilakukan pengujian fungsi jaringan
dengan melakukan Ping pada beberapa
komputer yang terpasang. Ping atau
Packet Internet Groper adalah sebuah
program utilitas yang digunakan untuk
memeriksa konektivitas jaringan. Ping
dilakukan menggunakan software Axence
NetTools. Software ini merupakan
aplikasi untuk menguji konektivitas pada
sebuah jaringan dengan cara
mengirimkan paket data ke server yang
dituju, dari data yang dikirimkan tersebut
dapat di ketahui nilai bandwith, delay dan
packet loss.
Gambar 2. Hasil Ping Dengan Software
Axence Net Tools
2.3 Parameter-parameter Quality of
Service (QoS)
Pada jaringan packet switched,
kualitas layanan dipengaruhi oleh
berbagai faktor, yang dapat dibagi
menjadi faktor manusia dan faktor teknis.
Berikut ini adalah parameter-parameter
Quality of Service (QoS) :
1. Troughput
Throughput adalah kemampuan
sebenarnya suatu jaringan dalam
melakukan pengiriman data. Biasanya
throughput selalu dikaitkan dengan
bandwidth. Karena throughput memang
bisa disebut juga dengan bandwidth
dalam kondisi yang sebenarnya.
Bandwidth lebih bersifat fix, sementara
throughput sifatnya adalah dinamis
tergantung trafik yang sedang terjadi.
2. Packet Loss
114
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Packet Loss merupakan suatu
parameter yang menggambarkan suatu
kondisi yang menunjukan jumlah total
paket yang hilang atau paket yang gagal
mencapai tempat tujuan.
3. Delay
Delay merupakan lamanya waktu
yang dibutuhkan sebuah paket untuk
mencapai tujuan dari awal proses
pentransmisian sampai paket tersebut
diterima. Delay pada suatu jaringan akan
menentukan langkah apa yang akan kita
ambil ketika memanajemen suatu
jaringan.
4. Bandwidth
Bandwidth adalah luas atau lebar
cakupan frekuensi yang digunakan oleh
sinyal dalam medium transmisi.
Bandwidth juga merupakan suatu ukuran
waktu tertentu dalam menggunakan jalur
internet yang spesifik ketika sedang
download suatu file.
5. Jitter
Jitter didefinisikan didefinisikan
sebagai gangguan pada komunikasi yang
disebabkan oleh perubahan sinyal karena
referensi waktu. Jitter merupakan variasi
dari delay. Jitter dipengaruhi oleh variasi
beban traffic dan besarnya tumpukan
antar paket yang ada dalam jaringan.
2.4 Diagnosa Sistem Jaringan
Diagnosa dilakukan untuk
mengetahui segala aspek yang dapat di
jadikan acuan sebagai dasar
pengoperasian sistem. Diagnosa yang
dilakukan difokuskan pada area lapangan,
yaitu pada area compressor booster.
1. Server Room ke Area
Compressor Booster-A (Jarak ±
75 meter)
Setelah melakukan diagnosa terhadap
sistem jaringan yang sudah berjalan di
area compressor booster-A ditemukanlah
beberapa masalah yaitu beberapa
peralatan instrument kontrol yang
menggunakan wifi terjadi ketidak stabilan
koneksi. Di area ini terdapat tiga
penarikan kabel, pertama untuk wifi yang
mempunyai jarak 77 meter dari server,
kedua komputer untuk operation yang
mempunyai jarak 72, ketiga adalah
komputer monitoring peralatan elektonik
yang terpasang langsung di dalam
kompresor dan mempunyai jarak 75
meter dari server.
2. Server Room ke Area
Compressor Booster-B (Jarak ±
95 meter)
Setelah melakukan diagnosa terhadap
sistem jaringan yang sudah berjalan di
area compressor booster-B ditemukanlah
beberapa masalah dan masalahnya
hampir sama yaitu beberapa peralatan
instrument kontrol yang menggunakan
wifi terjadi ketidak stabilan koneksi,
namun jumlahnya bertambah menjadi 3
perangkat. Hal ini disebabkan beberapa
lokasi peralatan instrumen kontrol yang
letaknya tersembunyi dan terjadi panas
berlebih pada area ini. Di area ini
terdapat tiga penarikan kabel juga,
pertama untuk wifi yang mempunyai
jarak 96 meter dari server, kedua
komputer untuk operation yang
mempunyai jarak 92 meter, ketiga adalah
komputer monitoring peralatan elektonik
yang terpasang langsung di dalam
kompresor dan mempunyai jarak 95
meter dari server.
3. Server Room ke Area
Compressor Booster-C (Jarak ±
125 meter)
Seperti pada compressor booster yang
lainnya, pada booster-C juga dilakukan
115
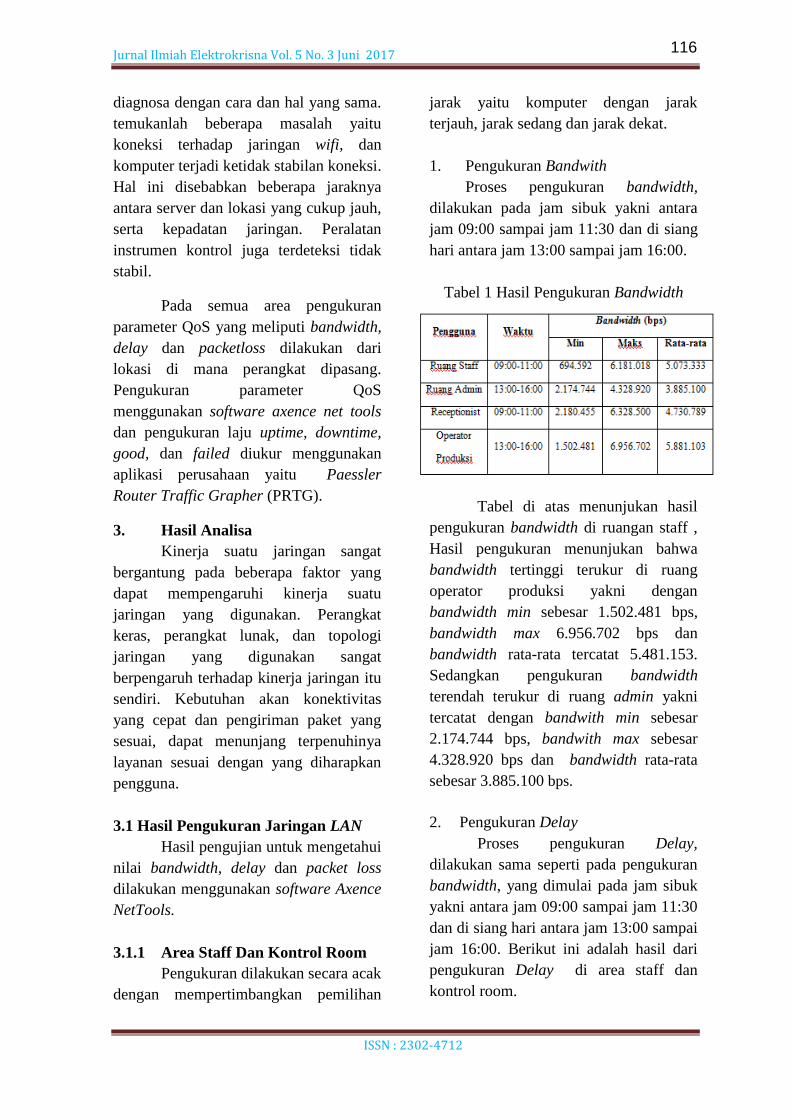
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
diagnosa dengan cara dan hal yang sama.
temukanlah beberapa masalah yaitu
koneksi terhadap jaringan wifi, dan
komputer terjadi ketidak stabilan koneksi.
Hal ini disebabkan beberapa jaraknya
antara server dan lokasi yang cukup jauh,
serta kepadatan jaringan. Peralatan
instrumen kontrol juga terdeteksi tidak
stabil.
Pada semua area pengukuran
parameter QoS yang meliputi bandwidth,
delay dan packetloss dilakukan dari
lokasi di mana perangkat dipasang.
Pengukuran parameter QoS
menggunakan software axence net tools
dan pengukuran laju uptime, downtime,
good, dan failed diukur menggunakan
aplikasi perusahaan yaitu Paessler
Router Traffic Grapher (PRTG).
3. Hasil Analisa
Kinerja suatu jaringan sangat
bergantung pada beberapa faktor yang
dapat mempengaruhi kinerja suatu
jaringan yang digunakan. Perangkat
keras, perangkat lunak, dan topologi
jaringan yang digunakan sangat
berpengaruh terhadap kinerja jaringan itu
sendiri. Kebutuhan akan konektivitas
yang cepat dan pengiriman paket yang
sesuai, dapat menunjang terpenuhinya
layanan sesuai dengan yang diharapkan
pengguna.
3.1 Hasil Pengukuran Jaringan LAN
Hasil pengujian untuk mengetahui
nilai bandwidth, delay dan packet loss
dilakukan menggunakan software Axence
NetTools.
3.1.1 Area Staff Dan Kontrol Room
Pengukuran dilakukan secara acak
dengan mempertimbangkan pemilihan
jarak yaitu komputer dengan jarak
terjauh, jarak sedang dan jarak dekat.
1. Pengukuran Bandwith
Proses pengukuran bandwidth,
dilakukan pada jam sibuk yakni antara
jam 09:00 sampai jam 11:30 dan di siang
hari antara jam 13:00 sampai jam 16:00.
Tabel 1 Hasil Pengukuran Bandwidth
Tabel di atas menunjukan hasil
pengukuran bandwidth di ruangan staff ,
Hasil pengukuran menunjukan bahwa
bandwidth tertinggi terukur di ruang
operator produksi yakni dengan
bandwidth min sebesar 1.502.481 bps,
bandwidth max 6.956.702 bps dan
bandwidth rata-rata tercatat 5.481.153.
Sedangkan pengukuran bandwidth
terendah terukur di ruang admin yakni
tercatat dengan bandwith min sebesar
2.174.744 bps, bandwith max sebesar
4.328.920 bps dan bandwidth rata-rata
sebesar 3.885.100 bps.
2. Pengukuran Delay
Proses pengukuran Delay,
dilakukan sama seperti pada pengukuran
bandwidth, yang dimulai pada jam sibuk
yakni antara jam 09:00 sampai jam 11:30
dan di siang hari antara jam 13:00 sampai
jam 16:00. Berikut ini adalah hasil dari
pengukuran Delay di area staff dan
kontrol room.
116
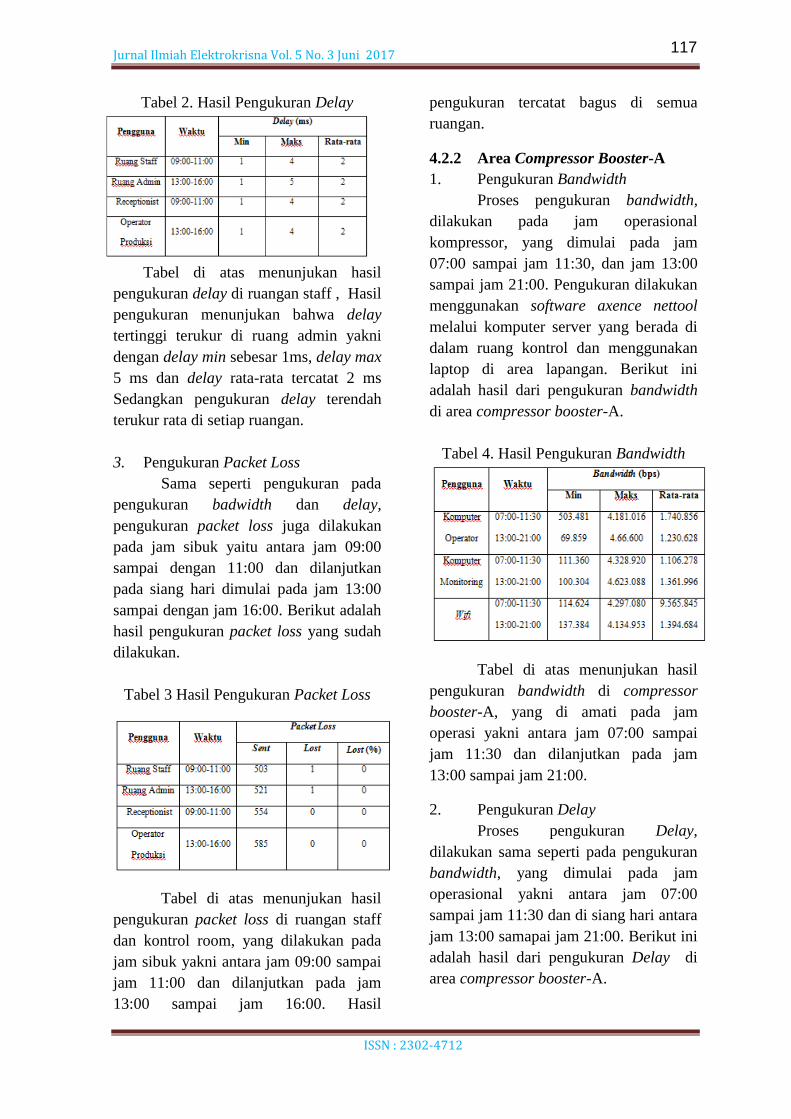
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Tabel 2. Hasil Pengukuran Delay
Tabel di atas menunjukan hasil
pengukuran delay di ruangan staff , Hasil
pengukuran menunjukan bahwa delay
tertinggi terukur di ruang admin yakni
dengan delay min sebesar 1ms, delay max
5 ms dan delay rata-rata tercatat 2 ms
Sedangkan pengukuran delay terendah
terukur rata di setiap ruangan.
3. Pengukuran Packet Loss
Sama seperti pengukuran pada
pengukuran badwidth dan delay,
pengukuran packet loss juga dilakukan
pada jam sibuk yaitu antara jam 09:00
sampai dengan 11:00 dan dilanjutkan
pada siang hari dimulai pada jam 13:00
sampai dengan jam 16:00. Berikut adalah
hasil pengukuran packet loss yang sudah
dilakukan.
Tabel 3 Hasil Pengukuran Packet Loss
Tabel di atas menunjukan hasil
pengukuran packet loss di ruangan staff
dan kontrol room, yang dilakukan pada
jam sibuk yakni antara jam 09:00 sampai
jam 11:00 dan dilanjutkan pada jam
13:00 sampai jam 16:00. Hasil
pengukuran tercatat bagus di semua
ruangan.
4.2.2 Area Compressor Booster-A
1. Pengukuran Bandwidth
Proses pengukuran bandwidth,
dilakukan pada jam operasional
kompressor, yang dimulai pada jam
07:00 sampai jam 11:30, dan jam 13:00
sampai jam 21:00. Pengukuran dilakukan
menggunakan software axence nettool
melalui komputer server yang berada di
dalam ruang kontrol dan menggunakan
laptop di area lapangan. Berikut ini
adalah hasil dari pengukuran bandwidth
di area compressor booster-A.
Tabel 4. Hasil Pengukuran Bandwidth
Tabel di atas menunjukan hasil
pengukuran bandwidth di compressor
booster-A, yang di amati pada jam
operasi yakni antara jam 07:00 sampai
jam 11:30 dan dilanjutkan pada jam
13:00 sampai jam 21:00.
2. Pengukuran Delay
Proses pengukuran Delay,
dilakukan sama seperti pada pengukuran
bandwidth, yang dimulai pada jam
operasional yakni antara jam 07:00
sampai jam 11:30 dan di siang hari antara
jam 13:00 samapai jam 21:00. Berikut ini
adalah hasil dari pengukuran Delay di
area compressor booster-A.
117
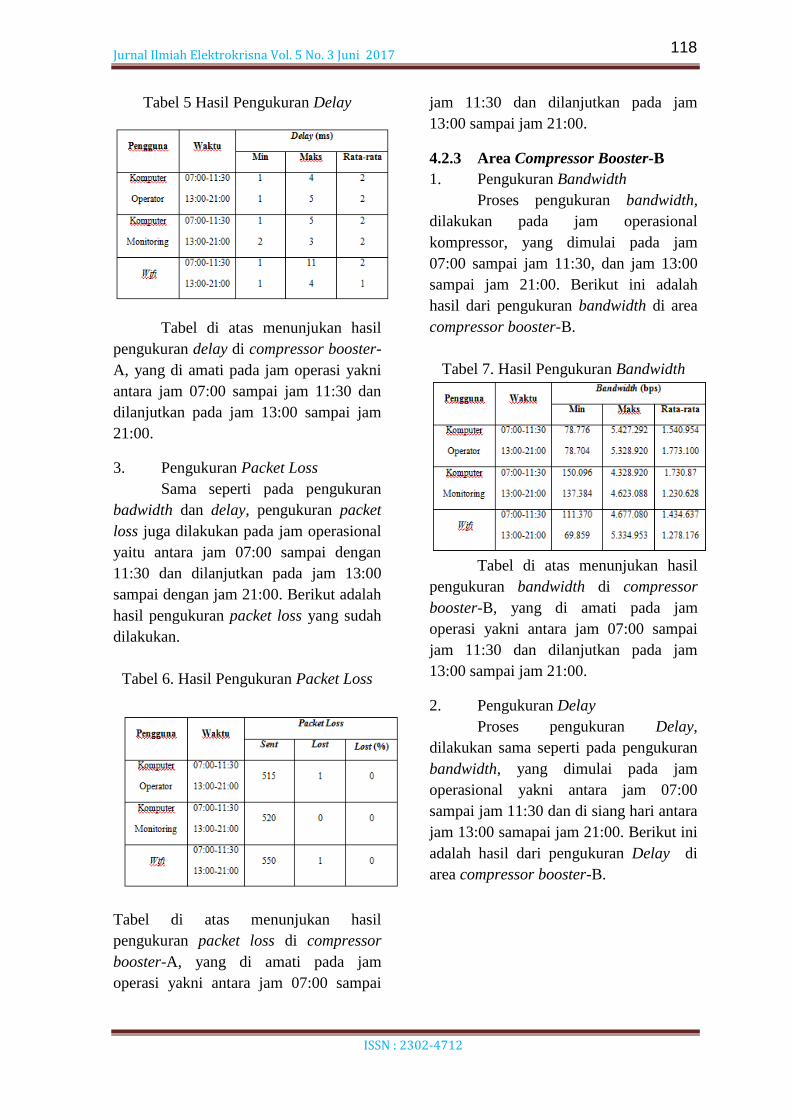
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Tabel 5 Hasil Pengukuran Delay
Tabel di atas menunjukan hasil
pengukuran delay di compressor booster-
A, yang di amati pada jam operasi yakni
antara jam 07:00 sampai jam 11:30 dan
dilanjutkan pada jam 13:00 sampai jam
21:00.
3. Pengukuran Packet Loss
Sama seperti pada pengukuran
badwidth dan delay, pengukuran packet
loss juga dilakukan pada jam operasional
yaitu antara jam 07:00 sampai dengan
11:30 dan dilanjutkan pada jam 13:00
sampai dengan jam 21:00. Berikut adalah
hasil pengukuran packet loss yang sudah
dilakukan.
Tabel 6. Hasil Pengukuran Packet Loss
Tabel di atas menunjukan hasil
pengukuran packet loss di compressor
booster-A, yang di amati pada jam
operasi yakni antara jam 07:00 sampai
jam 11:30 dan dilanjutkan pada jam
13:00 sampai jam 21:00.
4.2.3 Area Compressor Booster-B
1. Pengukuran Bandwidth
Proses pengukuran bandwidth,
dilakukan pada jam operasional
kompressor, yang dimulai pada jam
07:00 sampai jam 11:30, dan jam 13:00
sampai jam 21:00. Berikut ini adalah
hasil dari pengukuran bandwidth di area
compressor booster-B.
Tabel 7. Hasil Pengukuran Bandwidth
Tabel di atas menunjukan hasil
pengukuran bandwidth di compressor
booster-B, yang di amati pada jam
operasi yakni antara jam 07:00 sampai
jam 11:30 dan dilanjutkan pada jam
13:00 sampai jam 21:00.
2. Pengukuran Delay
Proses pengukuran Delay,
dilakukan sama seperti pada pengukuran
bandwidth, yang dimulai pada jam
operasional yakni antara jam 07:00
sampai jam 11:30 dan di siang hari antara
jam 13:00 samapai jam 21:00. Berikut ini
adalah hasil dari pengukuran Delay di
area compressor booster-B.
118
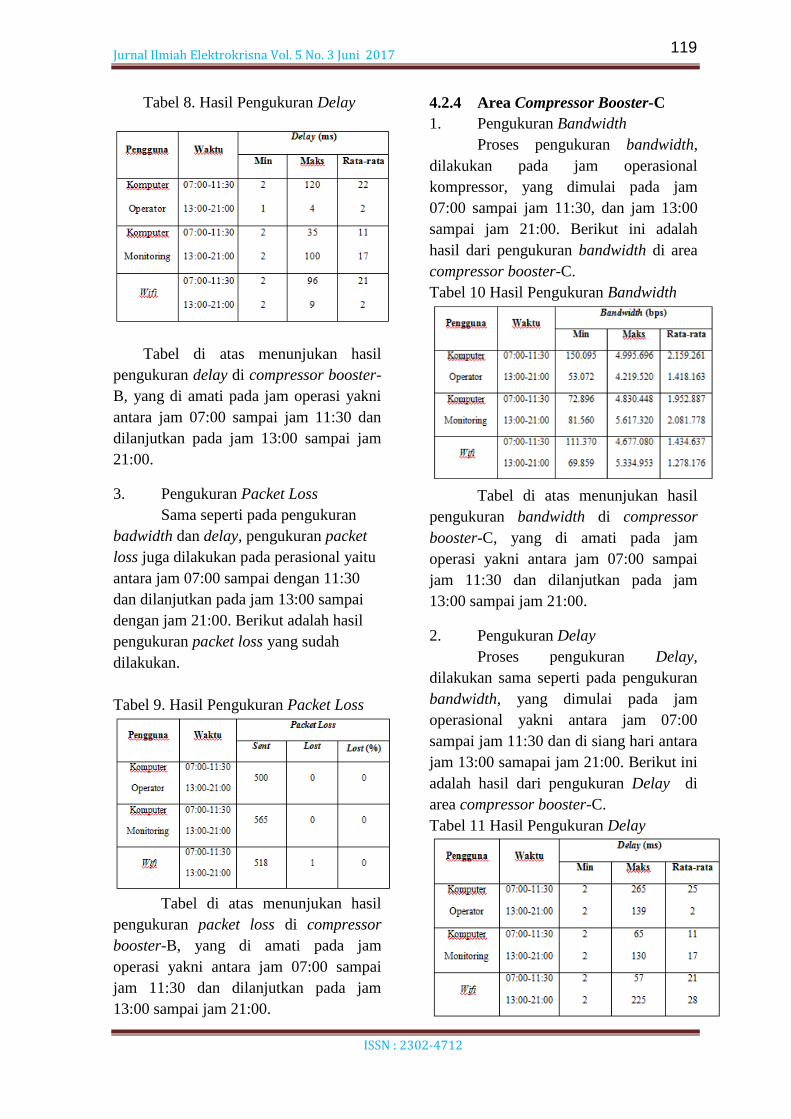
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Tabel 8. Hasil Pengukuran Delay
Tabel di atas menunjukan hasil
pengukuran delay di compressor booster-
B, yang di amati pada jam operasi yakni
antara jam 07:00 sampai jam 11:30 dan
dilanjutkan pada jam 13:00 sampai jam
21:00.
3. Pengukuran Packet Loss
Sama seperti pada pengukuran
badwidth dan delay, pengukuran packet
loss juga dilakukan pada perasional yaitu
antara jam 07:00 sampai dengan 11:30
dan dilanjutkan pada jam 13:00 sampai
dengan jam 21:00. Berikut adalah hasil
pengukuran packet loss yang sudah
dilakukan.
Tabel 9. Hasil Pengukuran Packet Loss
Tabel di atas menunjukan hasil
pengukuran packet loss di compressor
booster-B, yang di amati pada jam
operasi yakni antara jam 07:00 sampai
jam 11:30 dan dilanjutkan pada jam
13:00 sampai jam 21:00.
4.2.4 Area Compressor Booster-C
1. Pengukuran Bandwidth
Proses pengukuran bandwidth,
dilakukan pada jam operasional
kompressor, yang dimulai pada jam
07:00 sampai jam 11:30, dan jam 13:00
sampai jam 21:00. Berikut ini adalah
hasil dari pengukuran bandwidth di area
compressor booster-C.
Tabel 10 Hasil Pengukuran Bandwidth
Tabel di atas menunjukan hasil
pengukuran bandwidth di compressor
booster-C, yang di amati pada jam
operasi yakni antara jam 07:00 sampai
jam 11:30 dan dilanjutkan pada jam
13:00 sampai jam 21:00.
2. Pengukuran Delay
Proses pengukuran Delay,
dilakukan sama seperti pada pengukuran
bandwidth, yang dimulai pada jam
operasional yakni antara jam 07:00
sampai jam 11:30 dan di siang hari antara
jam 13:00 samapai jam 21:00. Berikut ini
adalah hasil dari pengukuran Delay di
area compressor booster-C.
Tabel 11 Hasil Pengukuran Delay
119
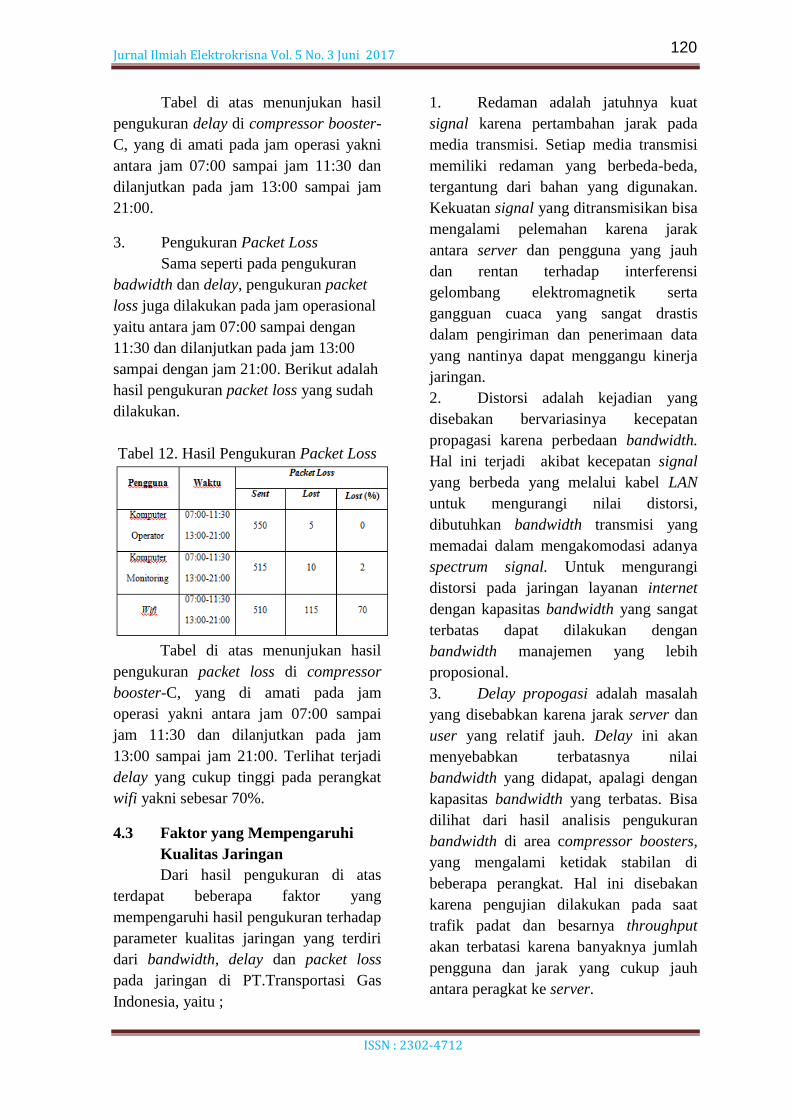
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Tabel di atas menunjukan hasil
pengukuran delay di compressor booster-
C, yang di amati pada jam operasi yakni
antara jam 07:00 sampai jam 11:30 dan
dilanjutkan pada jam 13:00 sampai jam
21:00.
3. Pengukuran Packet Loss
Sama seperti pada pengukuran
badwidth dan delay, pengukuran packet
loss juga dilakukan pada jam operasional
yaitu antara jam 07:00 sampai dengan
11:30 dan dilanjutkan pada jam 13:00
sampai dengan jam 21:00. Berikut adalah
hasil pengukuran packet loss yang sudah
dilakukan.
Tabel 12. Hasil Pengukuran Packet Loss
Tabel di atas menunjukan hasil
pengukuran packet loss di compressor
booster-C, yang di amati pada jam
operasi yakni antara jam 07:00 sampai
jam 11:30 dan dilanjutkan pada jam
13:00 sampai jam 21:00. Terlihat terjadi
delay yang cukup tinggi pada perangkat
wifi yakni sebesar 70%.
4.3 Faktor yang Mempengaruhi
Kualitas Jaringan
Dari hasil pengukuran di atas
terdapat beberapa faktor yang
mempengaruhi hasil pengukuran terhadap
parameter kualitas jaringan yang terdiri
dari bandwidth, delay dan packet loss
pada jaringan di PT.Transportasi Gas
Indonesia, yaitu ;
1. Redaman adalah jatuhnya kuat
signal karena pertambahan jarak pada
media transmisi. Setiap media transmisi
memiliki redaman yang berbeda-beda,
tergantung dari bahan yang digunakan.
Kekuatan signal yang ditransmisikan bisa
mengalami pelemahan karena jarak
antara server dan pengguna yang jauh
dan rentan terhadap interferensi
gelombang elektromagnetik serta
gangguan cuaca yang sangat drastis
dalam pengiriman dan penerimaan data
yang nantinya dapat menggangu kinerja
jaringan.
2. Distorsi adalah kejadian yang
disebakan bervariasinya kecepatan
propagasi karena perbedaan bandwidth.
Hal ini terjadi akibat kecepatan signal
yang berbeda yang melalui kabel LAN
untuk mengurangi nilai distorsi,
dibutuhkan bandwidth transmisi yang
memadai dalam mengakomodasi adanya
spectrum signal. Untuk mengurangi
distorsi pada jaringan layanan internet
dengan kapasitas bandwidth yang sangat
terbatas dapat dilakukan dengan
bandwidth manajemen yang lebih
proposional.
3. Delay propogasi adalah masalah
yang disebabkan karena jarak server dan
user yang relatif jauh. Delay ini akan
menyebabkan terbatasnya nilai
bandwidth yang didapat, apalagi dengan
kapasitas bandwidth yang terbatas. Bisa
dilihat dari hasil analisis pengukuran
bandwidth di area compressor boosters,
yang mengalami ketidak stabilan di
beberapa perangkat. Hal ini disebakan
karena pengujian dilakukan pada saat
trafik padat dan besarnya throughput
akan terbatasi karena banyaknya jumlah
pengguna dan jarak yang cukup jauh
antara peragkat ke server.
120
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
5. KESIMPULAN
Dari hasil perancangan,
pemasangan dan analisis kinerja jaringan
LAN dengan topologi star menggunakan
kabel gigaspeed Cat 6 di PT.Transportasi
Gas Indonesia, maka dapat di ambil
kesimpulan sebagai berikut :
1. Parameter QoS (Quality of
Services) yang terdiri dari
bandwidth, delay dan packet loss
sangat berpengaruh terhadap
kinerja jaringan LAN yang ada di
PT.Transportasi Gas Indonesia.
2. Perangkat keras yang digunakan
seperti jenis kabel, router, switch,
dan wifi, sangat mempengaruhi
kinerja jaringan. Hal ini
disebabkan karena kapasitas dari
masing-masing perangkat yang
digunakan, semakin besar
kapasitas yang dimiliki oleh
perangkat keras, maka semakin
bagus juga jaringan yang di
hasilkan dan sepadan dengan
harga dari perangkat tersebut
yang tergolong mahal.
3. Hasil pengukuran di compressor
booster-C yaitu pada pengukuran
packet loss yaitu sebesar 70 %
pada perangkat wifi. Berdasarkan
versi TIPHON bahwa packet loss
sebesar 70 % termasuk kedalam
kategori buruk, sedangkan
pengukuran untuk parameter lain
sangat bagus. Hal ini menjadi hal
yang sangat serius dan segera
dilakukan trouble shooting untuk
mendeteksi masalah yang terjadi.
DAFTAR PUSTAKA
[1] Anwar Zhaenudin, 2011, Sistem
kinerja Jaringan LAN, (http://www.
eprints.dinus.ac.id/13534/1/jurnal_1
4218.pdf diakses 22 November
2016.
[2] Axence NetTools 5.0 Pro 2009,
Axence NetTools User Guide,
Axence Software Inc 2005-2009.
(http://cdn01.axencesoftware.com/N
etTools.exe,diakses 22 September
2016).
[3] Budiono, N.W 2005. Konfigurasi
Dasar Cisco Switch
(http//:www.Ilmukomputer.com,
diakses 15 november 2016).
[4] Dadi Rahmayadi, 2010, Optimalisasi
Sistem Jaringan Komputer Lokal
(LAN),Perpustakaan Universitas
Indonesia,02 november 2016.
[5] Prosedure Pengujian, Telecom Testing
and Commisioning Procedure,
PT.Transportasi Gas Indonesia 2009.
[6] Sesindo, 2011, Pengukuran Kinerja
Jaringan Komputer,
(http//:www.digilib.its.ac.id/ublic/ITS-
paper-199953.pdf, diakses 26
november 2016)
[7] Slamet Purwo ST.MT, Dosen
Fakultas Teknik UNKRIS, Materi
kuliah,Jaringan Telekomunikasi
121

Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
ANALISA PENGUKURAN KECEPATAN PUTARAN MOTOR INDUKSI 3 FASA
BERDASARKAN FREKUENSI
Oleh : Teten Dian Hakim1
Abstrak - Untuk menganalisa kecepatan putaran motor induksi 3 fasa yang berdsarkan
frekuensi adalah dengan mengetahui atau membuktikan bahwa frekuensi bisa menurunkan
kecepatan putaran motor. Berdasarkan teori bahwa semakin besar frekuensi tegangan yang
digunakan semakin cepat pula motor akan berputar, begitupun sebaliknya jika frekuensi
tegangan semakin mengecil maka perputaran motor akan semakin melambat.. Konventer
frekuensi adalah merupakan alat pengontrol elektronik yang bertujuan untuk pengaturan
kecepatan motor terhadap sistem umpan balik atau ke perintah jauh dari pengontrol
eksternal, dan juaga dapat digunakan sebagai pengaman. Tachometer adalah alat untuk
mengukur putarn pada kecepatan motor. Perputaran motor dapat berubah jika frekuensinya
diubah, akan tetapi berdasarkan teori, rpm motor dapat dilihat dari jumlah kutub yang
terpasang pada motor tersebut, misalakan motor yang berjumlah 2 kutub dengan frekunsi
50Hz putaran maksimalnya adalah 3000 rpm. Sedangkan motor yang berjumlah 4 kutub
dengan frekuensi yang sama 50Hz maka kecepatan putaranya maksimalnya adalah 1500
rpm.
To analyze the speed of rotation of 3-phase induction motors that are frequency-based is to
know or prove that the frequency can decrease the speed of motor rotation. Based on the
theory that the greater the frequency of the voltage used the faster the motor will rotate,
vice versa if the frequency of the voltage is smaller then the motor rotation will slow down
.. Frequency conventional is an electronic controller that aims to adjust the speed of the
motor to the feedback system or to Commands away from external controllers, and juaga
can be used as a security. The tachometer is a device for measuring putarn at motor speed.
Motor rotation can change if the frequency is changed, but based on theory, motor rpm
can be seen from the number of poles mounted on the motor, for example a motor that has
2 poles with 50Hz frequency maximum rotation is 3000 rpm. While the motor that amounts
to 4 poles with the same frequency 50Hz then the maximum speed of the rider is 1500 rpm.
Kata kunci : kecepatan putaran motor induksi 3 fasa, Frekuensi, Inverter.
122
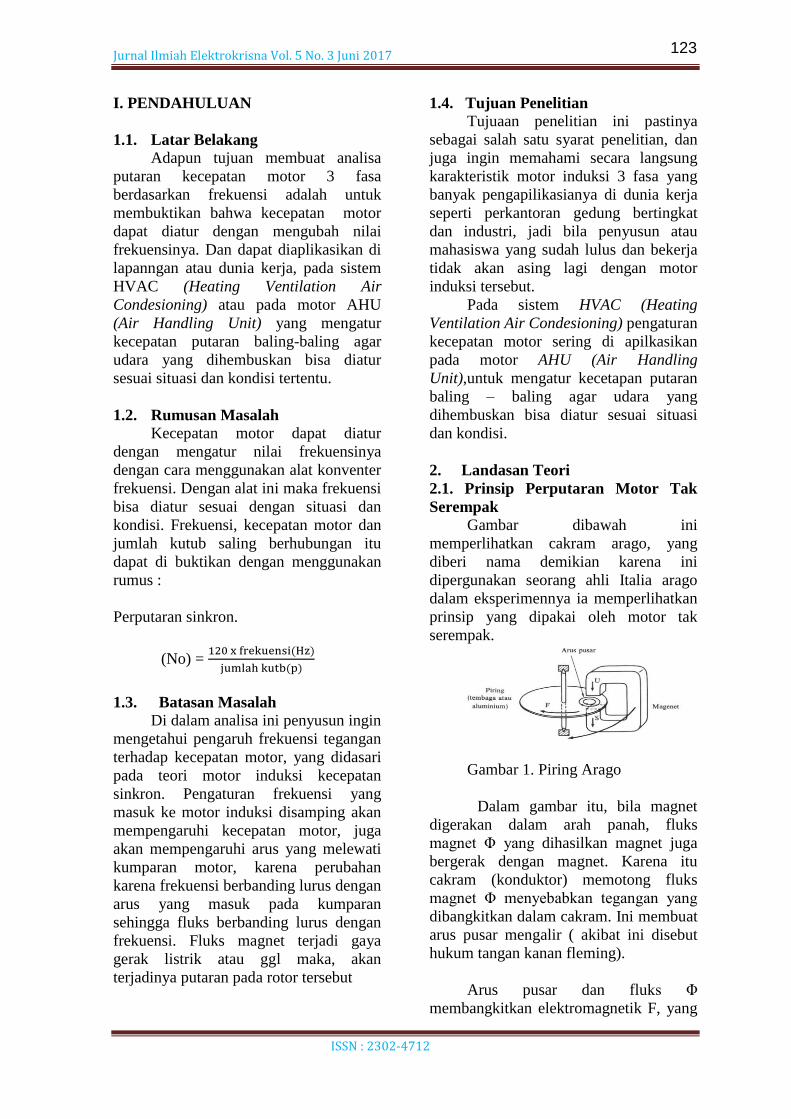
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
I. PENDAHULUAN
1.1. Latar Belakang
Adapun tujuan membuat analisa
putaran kecepatan motor 3 fasa
berdasarkan frekuensi adalah untuk
membuktikan bahwa kecepatan motor
dapat diatur dengan mengubah nilai
frekuensinya. Dan dapat diaplikasikan di
lapanngan atau dunia kerja, pada sistem
HVAC (Heating Ventilation Air
Condesioning) atau pada motor AHU
(Air Handling Unit) yang mengatur
kecepatan putaran baling-baling agar
udara yang dihembuskan bisa diatur
sesuai situasi dan kondisi tertentu.
1.2. Rumusan Masalah
Kecepatan motor dapat diatur
dengan mengatur nilai frekuensinya
dengan cara menggunakan alat konventer
frekuensi. Dengan alat ini maka frekuensi
bisa diatur sesuai dengan situasi dan
kondisi. Frekuensi, kecepatan motor dan
jumlah kutub saling berhubungan itu
dapat di buktikan dengan menggunakan
rumus :
Perputaran sinkron.
(No) = 120 x frekuensi(Hz)
jumlah kutb(p)
1.3. Batasan Masalah
Di dalam analisa ini penyusun ingin
mengetahui pengaruh frekuensi tegangan
terhadap kecepatan motor, yang didasari
pada teori motor induksi kecepatan
sinkron. Pengaturan frekuensi yang
masuk ke motor induksi disamping akan
mempengaruhi kecepatan motor, juga
akan mempengaruhi arus yang melewati
kumparan motor, karena perubahan
karena frekuensi berbanding lurus dengan
arus yang masuk pada kumparan
sehingga fluks berbanding lurus dengan
frekuensi. Fluks magnet terjadi gaya
gerak listrik atau ggl maka, akan
terjadinya putaran pada rotor tersebut
1.4. Tujuan Penelitian
Tujuaan penelitian ini pastinya
sebagai salah satu syarat penelitian, dan
juga ingin memahami secara langsung
karakteristik motor induksi 3 fasa yang
banyak pengapilikasianya di dunia kerja
seperti perkantoran gedung bertingkat
dan industri, jadi bila penyusun atau
mahasiswa yang sudah lulus dan bekerja
tidak akan asing lagi dengan motor
induksi tersebut.
Pada sistem HVAC (Heating
Ventilation Air Condesioning) pengaturan
kecepatan motor sering di apilkasikan
pada motor AHU (Air Handling
Unit),untuk mengatur kecetapan putaran
baling – baling agar udara yang
dihembuskan bisa diatur sesuai situasi
dan kondisi.
2. Landasan Teori
2.1. Prinsip Perputaran Motor Tak
Serempak
Gambar dibawah ini
memperlihatkan cakram arago, yang
diberi nama demikian karena ini
dipergunakan seorang ahli Italia arago
dalam eksperimennya ia memperlihatkan
prinsip yang dipakai oleh motor tak
serempak.
Gambar 1. Piring Arago
Dalam gambar itu, bila magnet
digerakan dalam arah panah, fluks
magnet Φ yang dihasilkan magnet juga
bergerak dengan magnet. Karena itu
cakram (konduktor) memotong fluks
magnet Φ menyebabkan tegangan yang
dibangkitkan dalam cakram. Ini membuat
arus pusar mengalir ( akibat ini disebut
hukum tangan kanan fleming).
Arus pusar dan fluks Φ
membangkitkan elektromagnetik F, yang
123
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
menggerakan cakram searah gerak
magnet (efek ini disebut hokum tangan
kiri fleming). Motor tak serempak
membuat medan magnetik berputar
dengan kumparan rotor, dari pada
menggerakan fluks magnetic yang
dibangkitkan magnet, yang memutar
rotor yang bekerja sebagai cakram
(konduktor).
Dalam hal motor tak serempak fasa
tunggal, medan magnet berputar tak
dapat dibangkitkan karena itu medan
magnet sama seperti medan magnet
berputar yang dibentuk dengan bantuan
kumparan asut untuk memungkinkan
pengasutan.
2.2. Kecepatan Sinkron Dan Slip
Jumlah kutub motor dihitung
dengan setiap set dari satu kutub U dan
satu kutub S dihitung sebagai dua dan
kerena itu bertambah dengan perkalian
ganda. Kecepatan (perputaran) motor
ditentukan oleh jumlah kutub dan
frekuensi. Kecepatan putaran medan
magnetik motor disebut kecepatan
(perputaran ) sinkron (No) dan
dinyatakan dalam jumlah perputaran per
menit (ppm). Hubungan antara
perputaran sinkron frekunsi dan jumlah
kutub dinyatakan sebagai berikut :
Perputaran sinkron
(No) = frekuensi (Hz)
jumlah kutub
2
x 60
Perputaran sinkron (No)
120 x frekuensi (Hz)
jumlah kutub
Pada motor tak serempak, bila rotor
berputar sama dengan kecepatan
perputran magnetik (Nr = No), rotor (
kumparan sekunder ) tidak memotong
fluks magnetik jadi tidak ada tegangan
yang diimbaskan ke rotor, sehingga tidak
dibangkitkan kopel. Untuk
membangkitkan kopel perputaran rotor
(Nr) harus lebih rendah dari perputaran
medan magnetic (No).
Nisbah ( No – Nr) dari
perpotongan fluks magnetik terhadap
kecepatan sinkron disebut slip (S).
S = No−Nr
No x 100%
Nr = ⌈1 −𝑆
100⌉ ppm
2.3. Pembangkitan Kopel Setelah medan stator (medan putar)
terbangkit, medan ini memotong belitan
stator ( untuk rotor belitan) atau
memotong batang konduktor ( untuk
rotor sangkar). Menurut faraday kejadian
diatas menimbulkan tegangan :
e = - n 𝛥𝛷
𝛥𝑡 Volt
Dimana :
n = banyaknya lilitan pada kumparan
ΔΦ = perubahan fluks magnet (Weber)
Δt = perubahan waktu (detik)
Jika rankaian rotor tertututp, maka akan
timbul arus dalam rangkaian ini dan akan
menyebabkan adanya kerapatan fluks B
(fluks/luas) serta L (panjang konduktor)
dari rangkaian rotor an arus ini
menyebabkan gaya sebesar :
F = BIL
Dimana :
F = Gaya (N).
B = Kerapatan fluks (weber).
I = Arus (A).
L = Panjang konduktor (m).
Gaya ini akan membangkiykan kopel
dngan adanya jari – jari rotor sebesar :
T = F.r
Dimana :
T = Kopel (Nm).
r = jari – jari rotor.
Besrnya slip motor induksi
dalam prakteknya berkisar 5% - 10%.
Untuk lebih jelas dengan memperhatikan
perbandingan motor berkutub 2 dan
berkutub 4 dengan frekuensi nominal 50
Hz dengan keluaran nominal yang sama
misalnya 5,5 kW, maka dapat di cari nilai
putaran rotor dan besarnya kopel
dianggap nilai slip (S) = 6%
124
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Untuk motor berkutub 2 didapat,
Besarnya putaran sinkron (Ns) :
120 𝑋 𝑓𝑟𝑒𝑘𝑢𝑒𝑛𝑠𝑖 (ℎ𝑧)
𝑗𝑢𝑚𝑙𝑎ℎ 𝑘𝑢𝑡𝑢𝑏 =
120 𝑥 50
2= 3000 𝑟𝑝𝑚
Besarnya putaran rotor (Nr) :
Nr = Ns 1 − 𝑆
100 =
3000 1 − 6
100 = 2820 𝑟𝑝𝑚
Besarnya kopel beban penuh adalah :
Kopel beban penuh = 𝑘𝑒𝑙𝑢𝑎𝑟𝑎𝑛 𝑛𝑜𝑚𝑖𝑛𝑎𝑙 (𝑘𝑤)
𝑝𝑢𝑡𝑎𝑟𝑎𝑛 𝑏𝑒𝑏𝑎 𝑝𝑒𝑛𝑢ℎ (𝑟𝑝𝑚)𝑥974 (𝑘𝑔. 𝑚)
Kopel beban penuh = 5.5 (𝑘𝑤)
2820𝑥974 (𝑘𝑔. 𝑚) = 1,9 𝑘𝑔. 𝑚
Untuk motor berkutub 4 didapat :
Besar putaran sinkron ( Ns) : 120 𝑥 𝑓𝑟𝑒𝑘𝑢𝑒𝑛𝑠𝑖 (𝐻𝑧)
𝑗𝑢𝑚𝑙𝑎ℎ 𝑘𝑢𝑡𝑢𝑏=
120 𝑥 50
4= 1500 𝑟𝑝𝑚
Besar putaran rotor (Nr) :
Nr = Ns 1 − 𝑆
100 =
1500 1 −6
100 = 1410 𝑟𝑝𝑚
Besarnya kopel adalah :
Kopel penuh = 𝑘𝑒𝑙𝑢𝑎𝑟𝑎𝑛 𝑛𝑜𝑚𝑘𝑛𝑎𝑙 (𝑘𝑤)
𝑝𝑢𝑡𝑎𝑟𝑎𝑛 𝑏𝑒𝑏𝑎𝑏𝑛 𝑝𝑒𝑛𝑢ℎ (𝑟𝑝𝑚)𝑥 974 (𝑘𝑔. 𝑚)
Kopel beban penuh = 5.5.(𝑘𝑤)
1410 (𝑟𝑝𝑚)𝑥 974 (𝑘𝑔. 𝑚) = 3,8 𝑘𝑔. 𝑚
Dari contoh kasus diatas dapat
disimpulkan bahwa : Dalam pemilihan
putaran motor perlu mempertimbangkan
karakteristik dari mesin beban, hal ini
karena semakin cepat perputaran rotor
makin kecil kopel yang dibangkitkan dan
sebaliknya semakin kecil putaran rotor
semakin besar kopel yang dibangkitkan.
Sebagai contoh pemilihan motor
untuk beban sebagai berikut :
Pompa terutama digunakan motor
berkutub 4.
Kompresor terutama digunakan motor
berkutub 4 dan 6 dengan penggerak
sabuk, dan berkutub 6 atau 8 dengan
kopling langsung.
Penghembus kipas angin : terutama
motor berkutub 2 dan 4.
Penghancur fris : terutama dipakai
berkutub 6,8 atau 10.
2.4. Kopel Asut Dan Kopel Pengunci
Dari Beban Ketika memilih motor, kopel asut
dan kopel pengunci (kopel maksimum)
dari mesin beban harus diperhatikan.
Besarnya kopel asut dan kopel pengunci
dari motor dinyatakan dalam prosen. Dan
besarnya kopel nominal adalah :
Kopel nominal = Keluaran nominal (Kw)
Putaram (Rpm) x
974 (kg/m) [1]
2.5. Menentukan Daya Yang
Diperlukan Untuk Beban Konstan a. Untuk Mengangkat Obyek
Bila obyek W (kg) diangkat
melawan gravitasi untuk l (meter) pada
kecepatan konstan dengan waktu t
(second), maka kakas F dan daya P
sebagai berikut :
F = W.l (kg.m)
P = W.l / t (kg.m / s) dan karena
l/t = v = m/s maka :
P = W.v (kg.m / s)
Bila satuan gravitasi kg.m dirubah 1
(kg.m / s ) = 9,8 (J /s ) = 9,8 (W)
P = 9,8 W.v (Watt)
Karena P adalah daya yang diperlukan
untuk kerja, dan efisiensi motor (η%)
maka keluaran mekanis Pm motor adalah
:
Pm = 9,8 W.v.10-3.(100 / η ) (kW) atau
Pm = ( W.v / 102 ) . (100 / 𝛈 )
dalam (kW) [1]
Untuk menentukan motor yang
sebenarnya, perlu memperhatikan kakas
geser yang berubah-ubah, kopel asut dan
tegangan poros serta factor keselamatan
dari rancangan dan produksinya.
Contoh perhitungan (mesin
pengangkat kran/wins) Mesin kran
diperlukan untuk mngangkat obyek 4,5
Ton, dengan kecepatan 12 m/min, dan
koefisien atau efisiensi 85%. Berapakah
keluaran motor harus dipilih ?
125
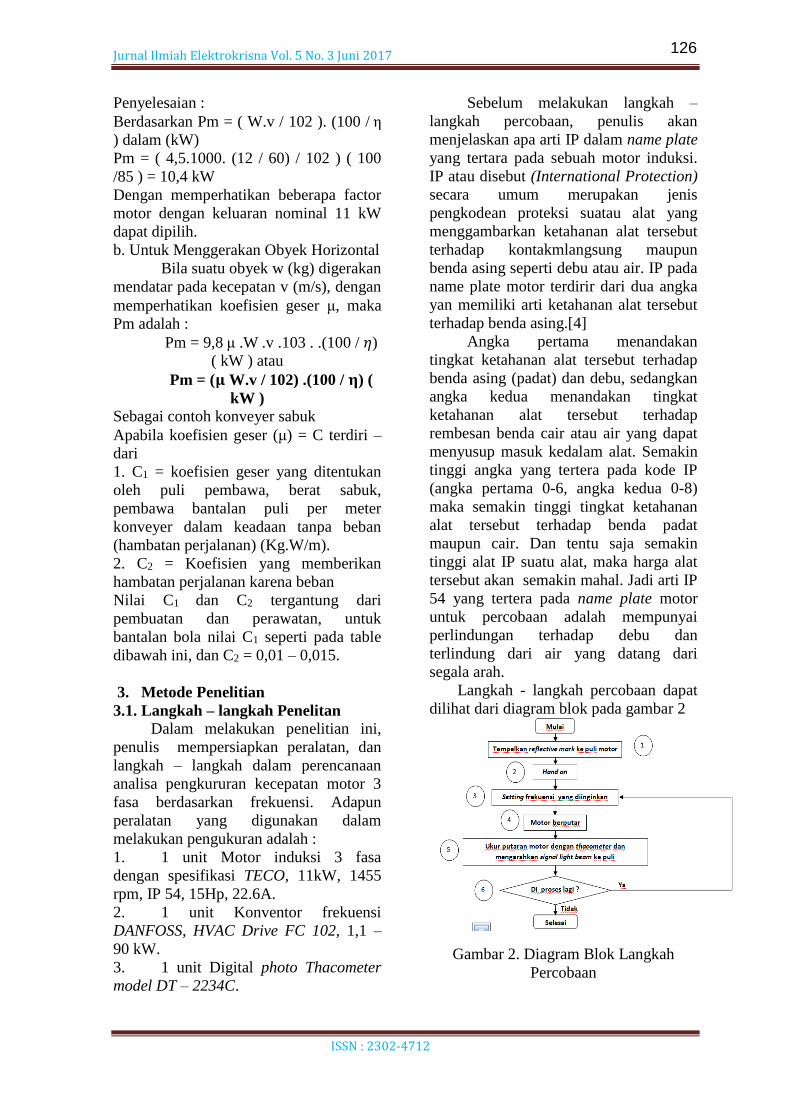
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Penyelesaian :
Berdasarkan Pm = ( W.v / 102 ). (100 / η
) dalam (kW)
Pm = ( 4,5.1000. (12 / 60) / 102 ) ( 100
/85 ) = 10,4 kW
Dengan memperhatikan beberapa factor
motor dengan keluaran nominal 11 kW
dapat dipilih.
b. Untuk Menggerakan Obyek Horizontal
Bila suatu obyek w (kg) digerakan
mendatar pada kecepatan v (m/s), dengan
memperhatikan koefisien geser μ, maka
Pm adalah :
Pm = 9,8 μ .W .v .103 . .(100 / 𝜂)
( kW ) atau
Pm = (𝛍 W.v / 102) .(100 / 𝛈) (
kW )
Sebagai contoh konveyer sabuk
Apabila koefisien geser (μ) = C terdiri –
dari
1. C1 = koefisien geser yang ditentukan
oleh puli pembawa, berat sabuk,
pembawa bantalan puli per meter
konveyer dalam keadaan tanpa beban
(hambatan perjalanan) (Kg.W/m).
2. C2 = Koefisien yang memberikan
hambatan perjalanan karena beban
Nilai C1 dan C2 tergantung dari
pembuatan dan perawatan, untuk
bantalan bola nilai C1 seperti pada table
dibawah ini, dan C2 = 0,01 – 0,015.
3. Metode Penelitian
3.1. Langkah – langkah Penelitan
Dalam melakukan penelitian ini,
penulis mempersiapkan peralatan, dan
langkah – langkah dalam perencanaan
analisa pengkururan kecepatan motor 3
fasa berdasarkan frekuensi. Adapun
peralatan yang digunakan dalam
melakukan pengukuran adalah :
1. 1 unit Motor induksi 3 fasa
dengan spesifikasi TECO, 11kW, 1455
rpm, IP 54, 15Hp, 22.6A.
2. 1 unit Konventor frekuensi
DANFOSS, HVAC Drive FC 102, 1,1 –
90 kW.
3. 1 unit Digital photo Thacometer
model DT – 2234C.
Sebelum melakukan langkah –
langkah percobaan, penulis akan
menjelaskan apa arti IP dalam name plate
yang tertara pada sebuah motor induksi.
IP atau disebut (International Protection)
secara umum merupakan jenis
pengkodean proteksi suatau alat yang
menggambarkan ketahanan alat tersebut
terhadap kontakmlangsung maupun
benda asing seperti debu atau air. IP pada
name plate motor terdirir dari dua angka
yan memiliki arti ketahanan alat tersebut
terhadap benda asing.[4]
Angka pertama menandakan
tingkat ketahanan alat tersebut terhadap
benda asing (padat) dan debu, sedangkan
angka kedua menandakan tingkat
ketahanan alat tersebut terhadap
rembesan benda cair atau air yang dapat
menyusup masuk kedalam alat. Semakin
tinggi angka yang tertera pada kode IP
(angka pertama 0-6, angka kedua 0-8)
maka semakin tinggi tingkat ketahanan
alat tersebut terhadap benda padat
maupun cair. Dan tentu saja semakin
tinggi alat IP suatu alat, maka harga alat
tersebut akan semakin mahal. Jadi arti IP
54 yang tertera pada name plate motor
untuk percobaan adalah mempunyai
perlindungan terhadap debu dan
terlindung dari air yang datang dari
segala arah.
Langkah - langkah percobaan dapat
dilihat dari diagram blok pada gambar 2
Gambar 2. Diagram Blok Langkah
Percobaan
1
Ya
126
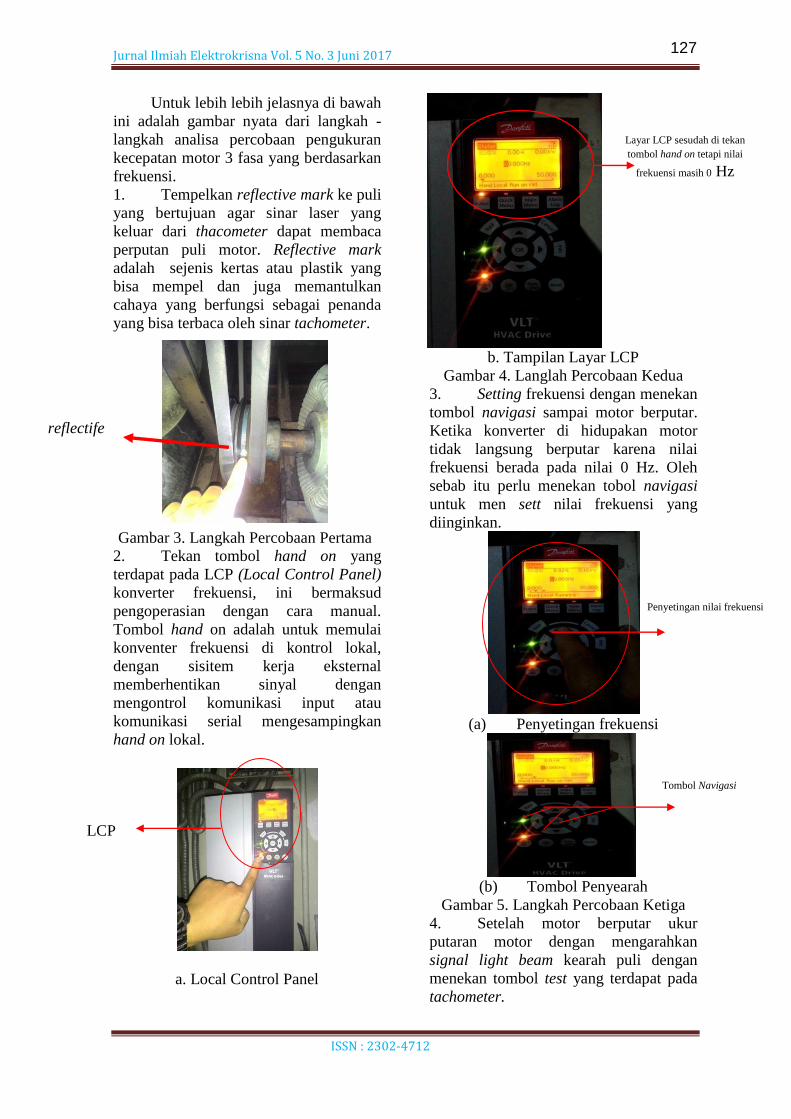
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Untuk lebih lebih jelasnya di bawah
ini adalah gambar nyata dari langkah -
langkah analisa percobaan pengukuran
kecepatan motor 3 fasa yang berdasarkan
frekuensi.
1. Tempelkan reflective mark ke puli
yang bertujuan agar sinar laser yang
keluar dari thacometer dapat membaca
perputan puli motor. Reflective mark
adalah sejenis kertas atau plastik yang
bisa mempel dan juga memantulkan
cahaya yang berfungsi sebagai penanda
yang bisa terbaca oleh sinar tachometer.
Gambar 3. Langkah Percobaan Pertama
2. Tekan tombol hand on yang
terdapat pada LCP (Local Control Panel)
konverter frekuensi, ini bermaksud
pengoperasian dengan cara manual.
Tombol hand on adalah untuk memulai
konventer frekuensi di kontrol lokal,
dengan sisitem kerja eksternal
memberhentikan sinyal dengan
mengontrol komunikasi input atau
komunikasi serial mengesampingkan
hand on lokal.
a. Local Control Panel
b. Tampilan Layar LCP
Gambar 4. Langlah Percobaan Kedua
3. Setting frekuensi dengan menekan
tombol navigasi sampai motor berputar.
Ketika konverter di hidupakan motor
tidak langsung berputar karena nilai
frekuensi berada pada nilai 0 Hz. Oleh
sebab itu perlu menekan tobol navigasi
untuk men sett nilai frekuensi yang
diinginkan.
(a) Penyetingan frekuensi
(b) Tombol Penyearah
Gambar 5. Langkah Percobaan Ketiga
4. Setelah motor berputar ukur
putaran motor dengan mengarahkan
signal light beam kearah puli dengan
menekan tombol test yang terdapat pada
tachometer.
reflectife
LCP
Tombol Navigasi
Layar LCP sesudah di tekan
tombol hand on tetapi nilai
frekuensi masih 0 Hz
Penyetingan nilai frekuensi
127
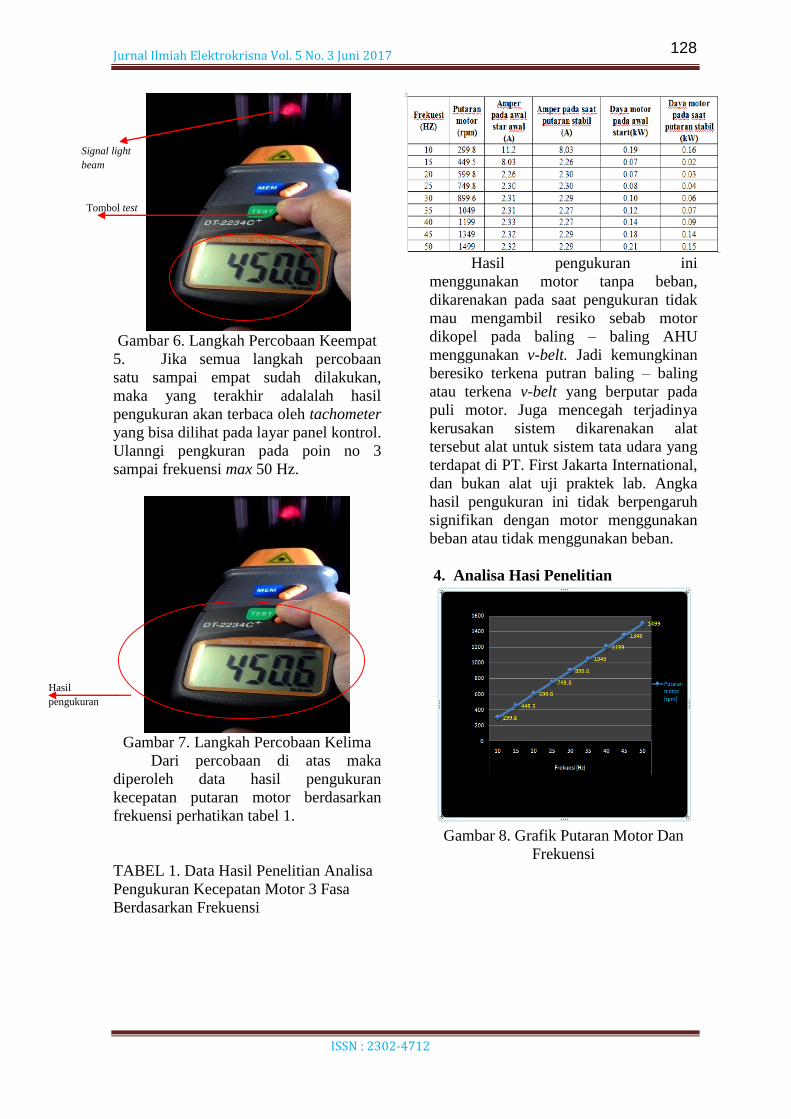
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Gambar 6. Langkah Percobaan Keempat
5. Jika semua langkah percobaan
satu sampai empat sudah dilakukan,
maka yang terakhir adalalah hasil
pengukuran akan terbaca oleh tachometer
yang bisa dilihat pada layar panel kontrol.
Ulanngi pengkuran pada poin no 3
sampai frekuensi max 50 Hz.
Gambar 7. Langkah Percobaan Kelima
Dari percobaan di atas maka
diperoleh data hasil pengukuran
kecepatan putaran motor berdasarkan
frekuensi perhatikan tabel 1.
TABEL 1. Data Hasil Penelitian Analisa
Pengukuran Kecepatan Motor 3 Fasa
Berdasarkan Frekuensi
Hasil pengukuran ini
menggunakan motor tanpa beban,
dikarenakan pada saat pengukuran tidak
mau mengambil resiko sebab motor
dikopel pada baling – baling AHU
menggunakan v-belt. Jadi kemungkinan
beresiko terkena putran baling – baling
atau terkena v-belt yang berputar pada
puli motor. Juga mencegah terjadinya
kerusakan sistem dikarenakan alat
tersebut alat untuk sistem tata udara yang
terdapat di PT. First Jakarta International,
dan bukan alat uji praktek lab. Angka
hasil pengukuran ini tidak berpengaruh
signifikan dengan motor menggunakan
beban atau tidak menggunakan beban.
4. Analisa Hasi Penelitian
Gambar 8. Grafik Putaran Motor Dan
Frekuensi
Signal light
beam
Tombol test
Hasil
pengukuran
128
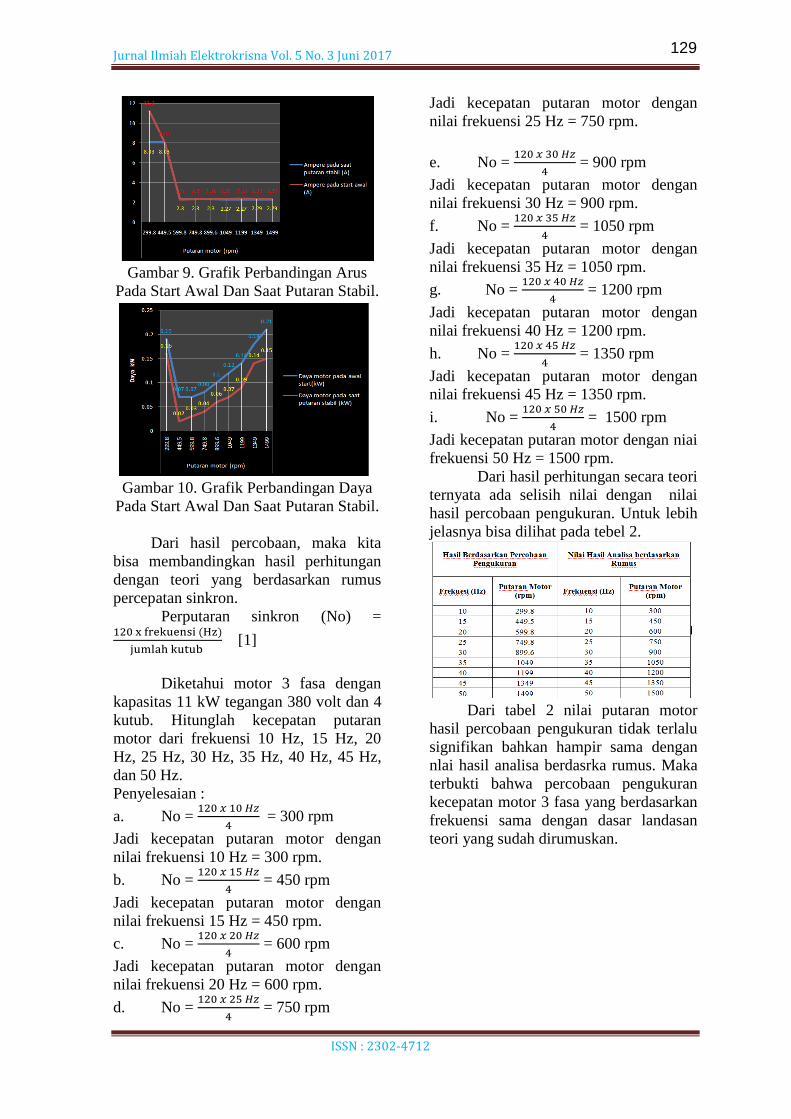
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Gambar 9. Grafik Perbandingan Arus
Pada Start Awal Dan Saat Putaran Stabil.
Gambar 10. Grafik Perbandingan Daya
Pada Start Awal Dan Saat Putaran Stabil.
Dari hasil percobaan, maka kita
bisa membandingkan hasil perhitungan
dengan teori yang berdasarkan rumus
percepatan sinkron.
Perputaran sinkron (No) = 120 x frekuensi (Hz)
jumlah kutub [1]
Diketahui motor 3 fasa dengan
kapasitas 11 kW tegangan 380 volt dan 4
kutub. Hitunglah kecepatan putaran
motor dari frekuensi 10 Hz, 15 Hz, 20
Hz, 25 Hz, 30 Hz, 35 Hz, 40 Hz, 45 Hz,
dan 50 Hz.
Penyelesaian :
a. No = 120 𝑥 10 𝐻𝑧
4 = 300 rpm
Jadi kecepatan putaran motor dengan
nilai frekuensi 10 Hz = 300 rpm.
b. No = 120 𝑥 15 𝐻𝑧
4 = 450 rpm
Jadi kecepatan putaran motor dengan
nilai frekuensi 15 Hz = 450 rpm.
c. No = 120 𝑥 20 𝐻𝑧
4 = 600 rpm
Jadi kecepatan putaran motor dengan
nilai frekuensi 20 Hz = 600 rpm.
d. No = 120 𝑥 25 𝐻𝑧
4 = 750 rpm
Jadi kecepatan putaran motor dengan
nilai frekuensi 25 Hz = 750 rpm.
e. No = 120 𝑥 30 𝐻𝑧
4 = 900 rpm
Jadi kecepatan putaran motor dengan
nilai frekuensi 30 Hz = 900 rpm.
f. No = 120 𝑥 35 𝐻𝑧
4 = 1050 rpm
Jadi kecepatan putaran motor dengan
nilai frekuensi 35 Hz = 1050 rpm.
g. No = 120 𝑥 40 𝐻𝑧
4 = 1200 rpm
Jadi kecepatan putaran motor dengan
nilai frekuensi 40 Hz = 1200 rpm.
h. No = 120 𝑥 45 𝐻𝑧
4 = 1350 rpm
Jadi kecepatan putaran motor dengan
nilai frekuensi 45 Hz = 1350 rpm.
i. No = 120 𝑥 50 𝐻𝑧
4 = 1500 rpm
Jadi kecepatan putaran motor dengan niai
frekuensi 50 Hz = 1500 rpm.
Dari hasil perhitungan secara teori
ternyata ada selisih nilai dengan nilai
hasil percobaan pengukuran. Untuk lebih
jelasnya bisa dilihat pada tebel 2.
Dari tabel 2 nilai putaran motor
hasil percobaan pengukuran tidak terlalu
signifikan bahkan hampir sama dengan
nlai hasil analisa berdasrka rumus. Maka
terbukti bahwa percobaan pengukuran
kecepatan motor 3 fasa yang berdasarkan
frekuensi sama dengan dasar landasan
teori yang sudah dirumuskan.
129
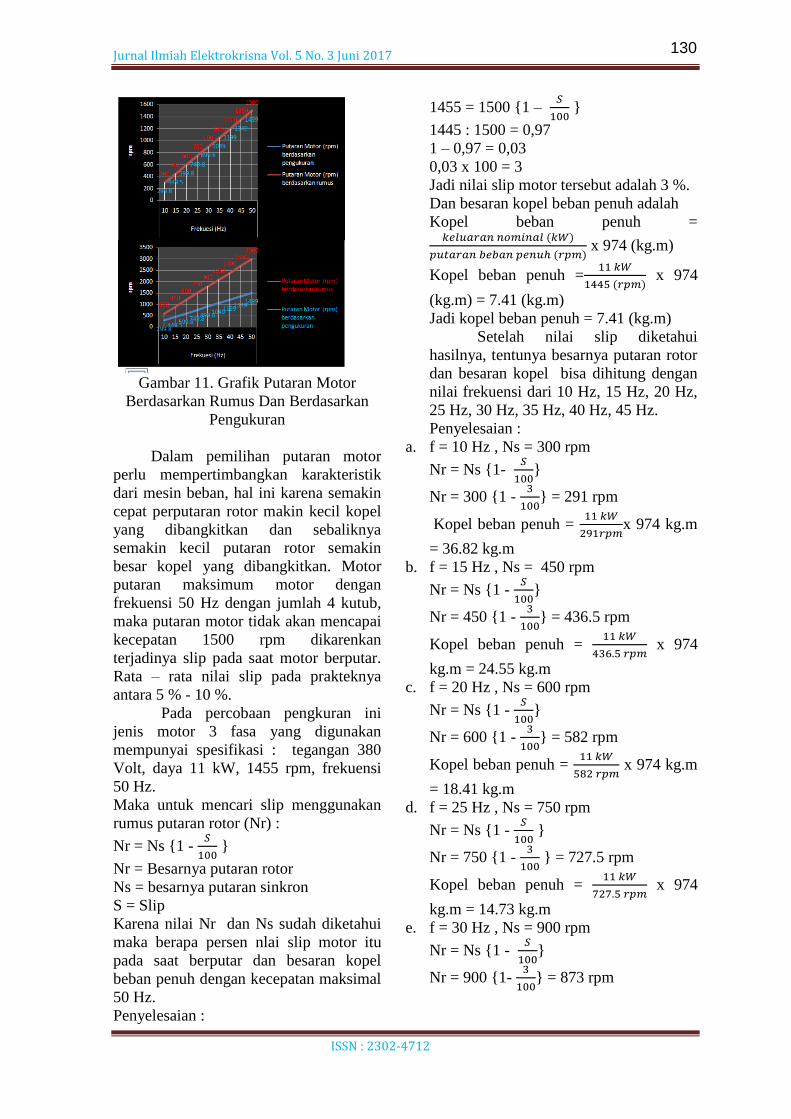
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Gambar 11. Grafik Putaran Motor
Berdasarkan Rumus Dan Berdasarkan
Pengukuran
Dalam pemilihan putaran motor
perlu mempertimbangkan karakteristik
dari mesin beban, hal ini karena semakin
cepat perputaran rotor makin kecil kopel
yang dibangkitkan dan sebaliknya
semakin kecil putaran rotor semakin
besar kopel yang dibangkitkan. Motor
putaran maksimum motor dengan
frekuensi 50 Hz dengan jumlah 4 kutub,
maka putaran motor tidak akan mencapai
kecepatan 1500 rpm dikarenkan
terjadinya slip pada saat motor berputar.
Rata – rata nilai slip pada prakteknya
antara 5 % - 10 %.
Pada percobaan pengkuran ini
jenis motor 3 fasa yang digunakan
mempunyai spesifikasi : tegangan 380
Volt, daya 11 kW, 1455 rpm, frekuensi
50 Hz.
Maka untuk mencari slip menggunakan
rumus putaran rotor (Nr) :
Nr = Ns 1 - 𝑆
100
Nr = Besarnya putaran rotor
Ns = besarnya putaran sinkron
S = Slip
Karena nilai Nr dan Ns sudah diketahui
maka berapa persen nlai slip motor itu
pada saat berputar dan besaran kopel
beban penuh dengan kecepatan maksimal
50 Hz.
Penyelesaian :
1455 = 1500 1 – 𝑆
100
1445 : 1500 = 0,97
1 – 0,97 = 0,03
0,03 x 100 = 3
Jadi nilai slip motor tersebut adalah 3 %.
Dan besaran kopel beban penuh adalah
Kopel beban penuh = 𝑘𝑒𝑙𝑢𝑎𝑟𝑎𝑛 𝑛𝑜𝑚𝑖𝑛𝑎𝑙 (𝑘𝑊)
𝑝𝑢𝑡𝑎𝑟𝑎𝑛 𝑏𝑒𝑏𝑎𝑛 𝑝𝑒𝑛𝑢ℎ (𝑟𝑝𝑚) x 974 (kg.m)
Kopel beban penuh =11 𝑘𝑊
1445 (𝑟𝑝𝑚) x 974
(kg.m) = 7.41 (kg.m)
Jadi kopel beban penuh = 7.41 (kg.m)
Setelah nilai slip diketahui
hasilnya, tentunya besarnya putaran rotor
dan besaran kopel bisa dihitung dengan
nilai frekuensi dari 10 Hz, 15 Hz, 20 Hz,
25 Hz, 30 Hz, 35 Hz, 40 Hz, 45 Hz.
Penyelesaian :
a. f = 10 Hz , Ns = 300 rpm
Nr = Ns 1- 𝑆
100
Nr = 300 1 - 3
100 = 291 rpm
Kopel beban penuh = 11 𝑘𝑊
291𝑟𝑝𝑚x 974 kg.m
= 36.82 kg.m
b. f = 15 Hz , Ns = 450 rpm
Nr = Ns 1 - 𝑆
100
Nr = 450 1 - 3
100 = 436.5 rpm
Kopel beban penuh = 11 𝑘𝑊
436.5 𝑟𝑝𝑚 x 974
kg.m = 24.55 kg.m
c. f = 20 Hz , Ns = 600 rpm
Nr = Ns 1 - 𝑆
100
Nr = 600 1 - 3
100 = 582 rpm
Kopel beban penuh = 11 𝑘𝑊
582 𝑟𝑝𝑚 x 974 kg.m
= 18.41 kg.m
d. f = 25 Hz , Ns = 750 rpm
Nr = Ns 1 - 𝑆
100
Nr = 750 1 - 3
100 = 727.5 rpm
Kopel beban penuh = 11 𝑘𝑊
727.5 𝑟𝑝𝑚 x 974
kg.m = 14.73 kg.m
e. f = 30 Hz , Ns = 900 rpm
Nr = Ns 1 - 𝑆
100
Nr = 900 1- 3
100 = 873 rpm
130
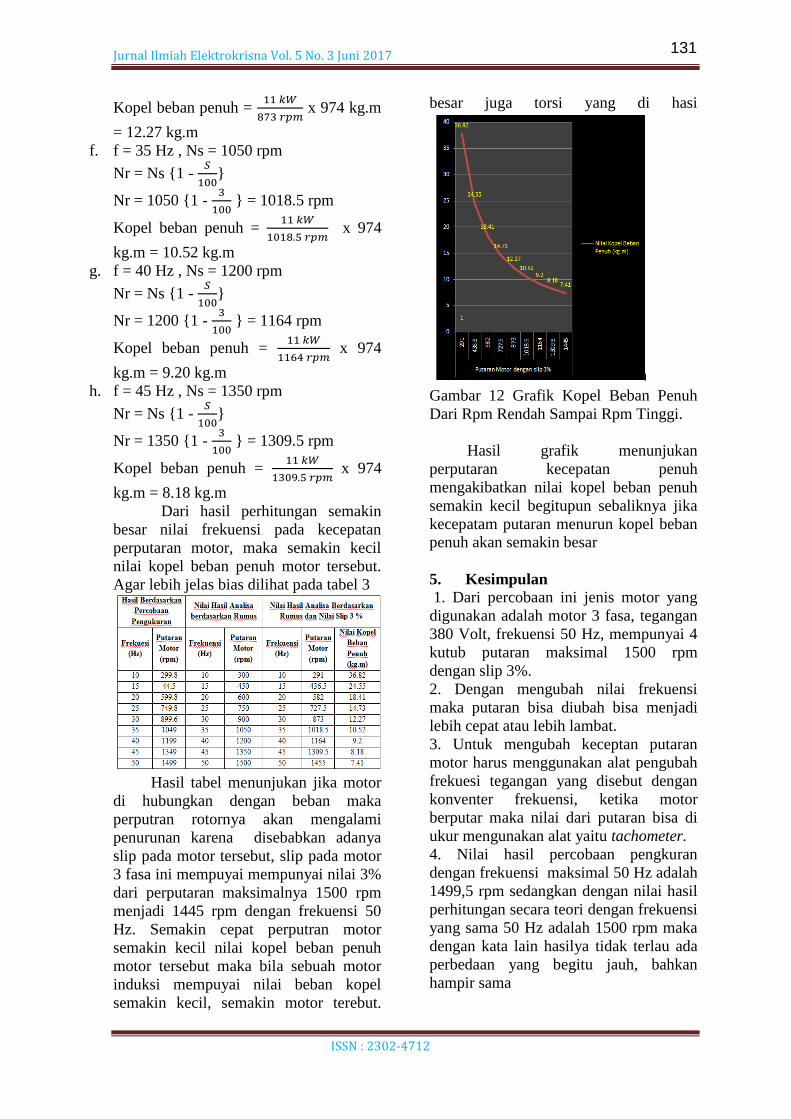
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Kopel beban penuh = 11 𝑘𝑊
873 𝑟𝑝𝑚 x 974 kg.m
= 12.27 kg.m
f. f = 35 Hz , Ns = 1050 rpm
Nr = Ns 1 - 𝑆
100
Nr = 1050 1 - 3
100 = 1018.5 rpm
Kopel beban penuh = 11 𝑘𝑊
1018.5 𝑟𝑝𝑚 x 974
kg.m = 10.52 kg.m
g. f = 40 Hz , Ns = 1200 rpm
Nr = Ns 1 - 𝑆
100
Nr = 1200 1 - 3
100 = 1164 rpm
Kopel beban penuh = 11 𝑘𝑊
1164 𝑟𝑝𝑚 x 974
kg.m = 9.20 kg.m
h. f = 45 Hz , Ns = 1350 rpm
Nr = Ns 1 - 𝑆
100
Nr = 1350 1 - 3
100 = 1309.5 rpm
Kopel beban penuh = 11 𝑘𝑊
1309.5 𝑟𝑝𝑚 x 974
kg.m = 8.18 kg.m
Dari hasil perhitungan semakin
besar nilai frekuensi pada kecepatan
perputaran motor, maka semakin kecil
nilai kopel beban penuh motor tersebut.
Agar lebih jelas bias dilihat pada tabel 3
Hasil tabel menunjukan jika motor
di hubungkan dengan beban maka
perputran rotornya akan mengalami
penurunan karena disebabkan adanya
slip pada motor tersebut, slip pada motor
3 fasa ini mempuyai mempunyai nilai 3%
dari perputaran maksimalnya 1500 rpm
menjadi 1445 rpm dengan frekuensi 50
Hz. Semakin cepat perputran motor
semakin kecil nilai kopel beban penuh
motor tersebut maka bila sebuah motor
induksi mempuyai nilai beban kopel
semakin kecil, semakin motor terebut.
besar juga torsi yang di hasi
Gambar 12 Grafik Kopel Beban Penuh
Dari Rpm Rendah Sampai Rpm Tinggi.
Hasil grafik menunjukan
perputaran kecepatan penuh
mengakibatkan nilai kopel beban penuh
semakin kecil begitupun sebaliknya jika
kecepatam putaran menurun kopel beban
penuh akan semakin besar
5. Kesimpulan
1. Dari percobaan ini jenis motor yang
digunakan adalah motor 3 fasa, tegangan
380 Volt, frekuensi 50 Hz, mempunyai 4
kutub putaran maksimal 1500 rpm
dengan slip 3%.
2. Dengan mengubah nilai frekuensi
maka putaran bisa diubah bisa menjadi
lebih cepat atau lebih lambat.
3. Untuk mengubah keceptan putaran
motor harus menggunakan alat pengubah
frekuesi tegangan yang disebut dengan
konventer frekuensi, ketika motor
berputar maka nilai dari putaran bisa di
ukur mengunakan alat yaitu tachometer.
4. Nilai hasil percobaan pengkuran
dengan frekuensi maksimal 50 Hz adalah
1499,5 rpm sedangkan dengan nilai hasil
perhitungan secara teori dengan frekuensi
yang sama 50 Hz adalah 1500 rpm maka
dengan kata lain hasilya tidak terlau ada
perbedaan yang begitu jauh, bahkan
hampir sama
131
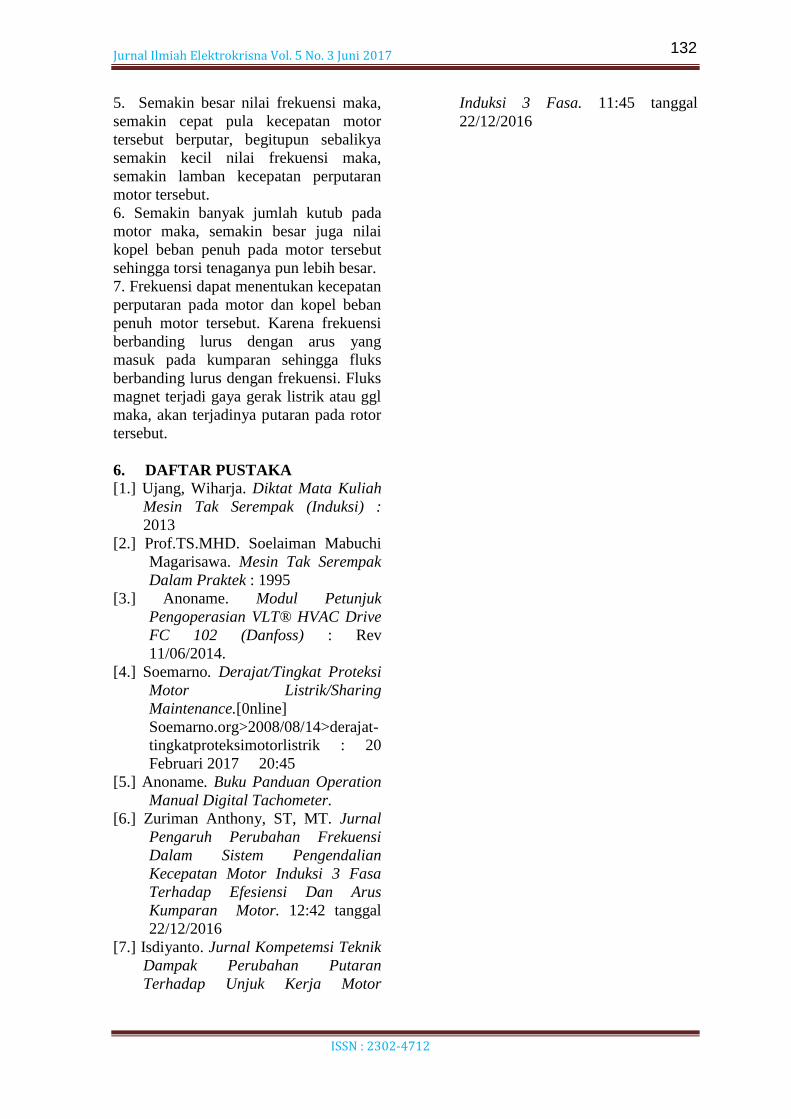
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
5. Semakin besar nilai frekuensi maka,
semakin cepat pula kecepatan motor
tersebut berputar, begitupun sebalikya
semakin kecil nilai frekuensi maka,
semakin lamban kecepatan perputaran
motor tersebut.
6. Semakin banyak jumlah kutub pada
motor maka, semakin besar juga nilai
kopel beban penuh pada motor tersebut
sehingga torsi tenaganya pun lebih besar.
7. Frekuensi dapat menentukan kecepatan
perputaran pada motor dan kopel beban
penuh motor tersebut. Karena frekuensi
berbanding lurus dengan arus yang
masuk pada kumparan sehingga fluks
berbanding lurus dengan frekuensi. Fluks
magnet terjadi gaya gerak listrik atau ggl
maka, akan terjadinya putaran pada rotor
tersebut.
6. DAFTAR PUSTAKA
[1.] Ujang, Wiharja. Diktat Mata Kuliah
Mesin Tak Serempak (Induksi) :
2013
[2.] Prof.TS.MHD. Soelaiman Mabuchi
Magarisawa. Mesin Tak Serempak
Dalam Praktek : 1995
[3.] Anoname. Modul Petunjuk
Pengoperasian VLT® HVAC Drive
FC 102 (Danfoss) : Rev
11/06/2014.
[4.] Soemarno. Derajat/Tingkat Proteksi
Motor Listrik/Sharing
Maintenance.[0nline]
Soemarno.org>2008/08/14>derajat-
tingkatproteksimotorlistrik : 20
Februari 2017 20:45
[5.] Anoname. Buku Panduan Operation
Manual Digital Tachometer.
[6.] Zuriman Anthony, ST, MT. Jurnal
Pengaruh Perubahan Frekuensi
Dalam Sistem Pengendalian
Kecepatan Motor Induksi 3 Fasa
Terhadap Efesiensi Dan Arus
Kumparan Motor. 12:42 tanggal
22/12/2016
[7.] Isdiyanto. Jurnal Kompetemsi Teknik
Dampak Perubahan Putaran
Terhadap Unjuk Kerja Motor
Induksi 3 Fasa. 11:45 tanggal
22/12/2016
132
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
PERENCANAAN DAN ANALISA SISTEM PENTANAHAN PADA PEMBANGKIT
LISTRIK TENAGA GAS 100MW DI GORONTALO
Oleh : Ujang Wiharja1
ABSTRAK Pada Pembangkit Listrik Tenaga Gas 100MW di Gorontalo dalam
perencanaannya hasil perhitungan untuk tananan pentanahannya sebesar 0.1973 ohm, akan
tetapi setelah dipasang sesuai dengan desain dan dilakukan pengukuran nilai tahanan
pentanahan tersebut mempunyai nilai rata-rata sebesar 0.055 ohm.
Dari kejadian diatas maka penulis tertarik dan melakukan penelitian untuk menganalisa
tentang hal tersebut mengenai perencanaan dan analisa sistem pentanahan pada
Pembangkit Listrik Tenaga Gas 100MW di Gorontalo berdasarkan pada Schwarz's
Formula sesuai IEEE std. 80-2000.
ABSTRACT On the 100 MW Gas Power Plant in Gorontalo, the final result of grounding
calculation shall be 0.1973 ohm, but after the installation has been done as per design and
tested the average value of grounding resistance is 0.055 ohm.
Since the above incident, the writer is interested in and conducts research to analyse about
it on the planning and analysis of the grounding system of 100 MW Gas Power Plant in
Gorontalo based on Schwarz's Formula as per IEEE 80-2000.
Keyword : Grounding Resistance, Soil Resistivity, Touch Voltage, Step Voltage
PENDAHULUAN
Sistem pentanahan merupakan salah satu
komponen yang digunakan dalam sistem
proteksi. Untuk mendeteksi gangguan arus
listrik, sistem pentanahan digunakan
sebagai media pembanding untuk
mengetahui tingkat gangguan yang terjadi.
Bila ada arus yang langsung ataupun arus
bocor yang menuju kesistem pentanahan
berarti rangkaian tersebut sedang terjadi
gangguan dimana gangguan tersebut harus
dihentikan. Hal ini dimaksudkan untuk
menjaga keamanan secara keseluruhan
pada sistem. Keamanan tersebut meliputi
keamanan orang disekitarnya, operator,
peralatan-peralatan kelistrikan dan
keselamatan lingkungan disekitarnya. Bila
terjadi gangguan arus listrik, maka suplai
tenaga listrik harus dihentikan dengan
membuka pemutus utama dari rangkaian
yang sedang terjadi kesalahan atau
gangguan arus listrik. Berdasarkan
Peraturan Umum Instalasi Listrik (PUIL-
2000) bahwa sistem pentanahan
seharusnya mempunyai nilai tahanan yang
sangat kecil yaitu berkisar kurang dari 5
ohm.
Pada Pembangkit Listrik Tenaga
Gas 100MW di Gorontalo dalam
perencanaannya dilakukan perhitungan
oleh PT. Rekayasa Engineering (PT.RE)
sebagai konsultan perencana dengan hasil
perhitungan untuk tananan pentanahannya
sebesar 0.1973 ohm. Akan tetapi setelah
dipasang oleh PT. Pembangunan
Perumahan (PT. PP) sebagai kontraktor
utama sesuai dengan desain dan dilakukan
pengukuran disaksikan oleh PT. PLN
(Persero) sebagai pemilik maka didapat
nilai tahanan pentanahan rata-rata sebesar
0.055 ohm.
Identifikasi masalah pada penelitian
penelitian ini adalah :
1. Pembangkit Listrik Tenaga Gas
100MW di Gorontalo harus membuat
sistem pentanahan dengan nilai
133
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
resistansi kurang dari 5 ohm sesuai
PUIL-2000.
2. Adanya perbedaan nilai resistansi
pentanahaan antara hasil perhitungan
dalam perencanaan sebesar 0.1973
ohm dan hasil pengukuran dilokasi
sebesar 0.055ohm.
Pentanahan sebuah sistem adalah
menghubungkan konduktor fasa atau
netral menuju bumi dengan tujuan sebagai
berikut:
1. Menjaga dan mengatur beda potensial
terhadap tanah sehingga masih dalam
batas kewajaran.
2. Menyediakan rangkaian tertutup
sehingga arus dapat mengalir dari dan
menuju tanah yang lebih lanjut
digunakan untuk mendeteksi adanya
hubungan-hubungan yang tidak
diinginkan antara konduktor dengan
tanah. Deteksi inilah yang kemudian
akan memicu operasi proteksi untuk
mengambil langkah pengamanan yang
salah satunya adalah dengan
memutuskan konduktor tersebut dari
sumber.
Jenis sistem pentanahan yang
umum dipergunakan saat ini yaitu :
1. Sistem pentanahan batang elektroda
tunggal
2. Sistem pentanahan batang elektroda
ganda
3. Sistem pentanahan jaring mesh
4. Sistem pentanahan metoda grid
Karakteristik sistem pentanahan
yang efektif antara lain adalah:
1. Terencana dengan baik, semua
koneksi yang terdapat pada system
harus merupakan koneksi yang sudah
direncanakan sebelumnya dengan
kaidah- kaidah tertentu.
2. Verifikasi secara visual dapat
dilakukan.
3. Menghindarkan gangguan yang terjadi
pada arus listrik dari perangkat.
4. Semua komponen metal harus
ditahan/diikat oleh sistem pentanahan,
dengan tujuan untuk meminimal kan
arus listrik melalui material yang
bersifat konduktif pada potensial
listrik yang sama[4][5].
Dalam sebuah instalasi listrik ada
empat bagian yang harus ditanahkan atau
sering juga disebut dibumikan. Empat
bagian dari instalasi listrik ini adalah:
1. Semua bagian instalasi yang terbuat
dari logam (menghantarkan listrik) dan
dengan mudah bisa disentuh manusia.
Hal ini perlu agar potensial dari logam
yang mudah disentuh manusia selalu
sama dengan potensial tanah (bumi)
tempat manusia berpijak sehingga
tidak berbahaya bagi manusia yang
menyentuhnya.
2. Bagian pembuangan muatan listrik
(bagian bawah) dari lightning arrester.
Hal ini diperlukan agar lightning
arrester dapat berfungsi dengan baik,
yaitu membuang muatan listrik yang
diterimanya dari petir ketanah (bumi)
dengan lancar.
3. Kawat penangkal petiryang ada pada
bagian atas saluran transmisi. Kawat
penangkal petirini sesungguhnya juga
berfungsi sebagai lightning arrester.
Karena letaknya yang ada disepanjang
saluran transmisi, makasemua kaki
tiang transmisi harus ditanahkan agar
petir yang menyambar dapat
disalurkan ketanah dengan lancar
melalui kaki tiang saluran transmisi.
4. Titik netral dari transformator atau
generator. Hal ini diperlukan dalam
kaitan dengan keperluan proteksi,
khususnya yang menyangkut
permasalahan terkait dengan gangguan
hubung singkat ketanah. Dalam
praktik di lapangan, biasanya
diinginkan agar besaran tahanan
pentanahan dari titik – titik pentanahan
tersebut diatas nilai tahanannya tidak
melebihi 5 ohm.
134
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
METODOLOGI PENELITIAN
Tahapan – tahapan yang akan
dilakukan dalam analisa ini adalah sebagai
berikut :
1. Membuat perhitungan perencanaan
instalasi sistem pentanahan yang akan
di pasang pada masing-masing
bangunan dan secara umum untuk area
yang tebuka atau overall area dengan
mengunakan Schwarz's Formula
sesuai dengan IEEE std.80-2000.
2. Melakukan perhitungan perencanaan
sitem pentanahan sesuai dengan
standard IEEE std.80-2000 antara lain
:
Langkah 1 :
mengumpulkan input data.
Langkah 2 :
menentukan penghantar yang
digunakan dalam instalasi
pentanahan.
Langkah 3 :
menentukan criteria besaran
tegangan sentuh (Vtouch50&70)
serta tegangan langkah
(Vstep50&70).
Langkah 4 :
menentukan panjang penghantar,
jumlah penghantar berjajar,
kedalaman penghantar.
Langkah 5 :
menghitung besarnya grounding
resistance.
Langkah 6 :
menghitung besarnya arus
gangguan maksimum.
Langkah 7 :
menghitung potensi kenaikan
tegangan grounding.
Langkah 8 :
menghitung tegangan jala-jala
(Em) dan tegangan sentuh (Es).
Langkah 9 :
membandingkan tegangan jala-
jala (Em) dengan tegangan sentuh
(Vtouch50&70).
Langkah 10 :
membandingkan tegangan sentuh
(Es) dengan tegangan langkah
(Vstep50&70).
Langkah 11 :
modifikasi desain yang telah
dilakukan bila terjadi ada nilai
yang dianggap kurang memenuhi
persyaratan sesuai IEEE 80.
Langkah 12 :
membuat laporan perhitungan
(Grounding Calculation Report).
Dari data ini siap digunakan untuk
pembuatan dokumen detail untuk
desain instalasi pentanahan.
3. Membandingkan dan menganalisa
hasil pengukuran instalasi pentanahan
yang telah dipasang (Rg) dengan hasil
perhitungan yang telah dilakukan
sesuai metode Schwarz's Formula
sesuai dengan IEEE std.80-2000 diatas
serta membuat kesimpulan dari hasil
analisa tersebut.
135
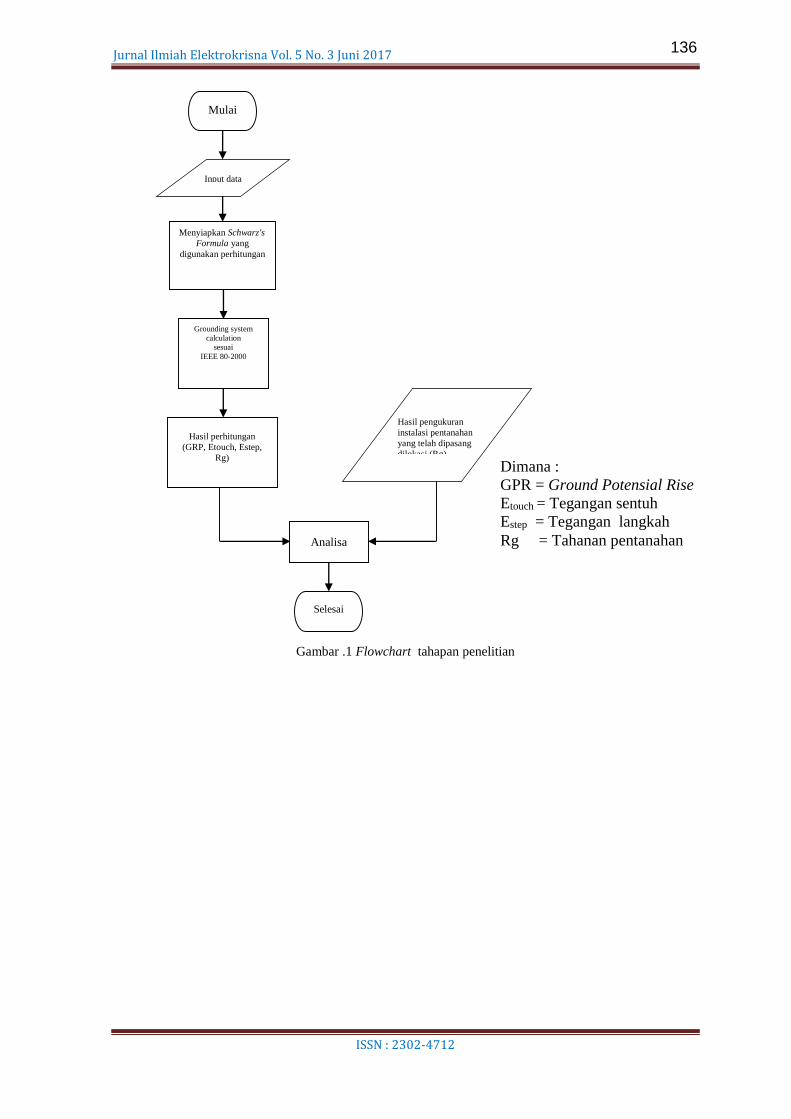
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Gambar .1 Flowchart tahapan penelitian
Dimana :
GPR = Ground Potensial Rise
Etouch = Tegangan sentuh
Estep = Tegangan langkah
Rg = Tahanan pentanahan
Selesai
Hasil pengukuran
instalasi pentanahan
yang telah dipasang
dilokasi (Rg)
Menyiapkan Schwarz's
Formula yang
digunakan perhitungan
Mulai
Grounding system
calculation sesuai
IEEE 80-2000
Hasil perhitungan
(GRP, Etouch, Estep,
Rg)
Input data
Analisa
136
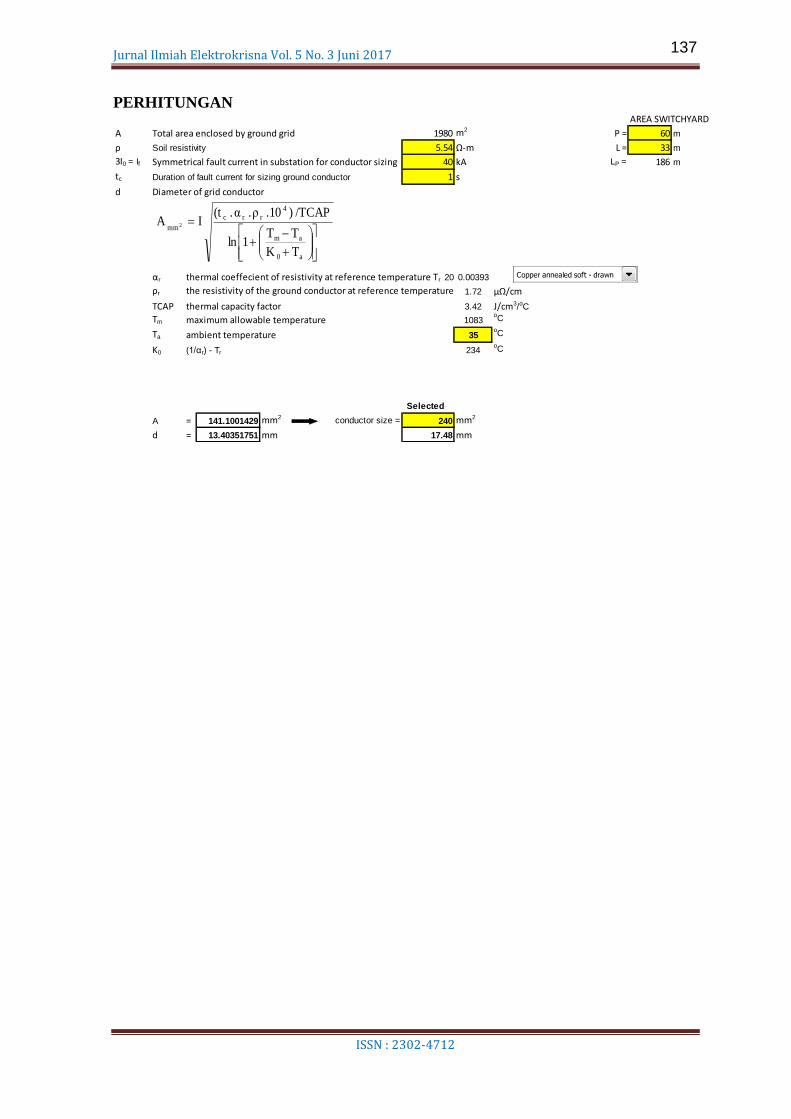
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
PERHITUNGANAREA SWITCHYARD
A Total area enclosed by ground grid 1980 m2 P = 60 m
ρ Soil resistivity 5.54 Ω-m L = 33 m
3I0 = If Symmetrical fault current in substation for conductor sizing 40 kA LP = 186 m
tc Duration of fault current for sizing ground conductor 1 s
d Diameter of grid conductor
αr thermal coeffecient of resistivity at reference temperature Tr 20o C0.00393 1
ρr the resistivity of the ground conductor at reference temperature Tr 1.72 μΩ/cm
TCAP thermal capacity factor 3.42 J/cm3/oC
Tm maximum allowable temperature 1083oC
Ta ambient temperature 35oC
K0 (1/αr) - Tr 234oC
Selected
A = 141.1001429 mm2 conductor size = 240 mm2
d = 13.40351751 mm 17.48 mm
a0
am
4rrc
mm
TK
TT1ln
/TCAP).10ρ.α.(tIA 2
Copper annealed soft - drawn
137
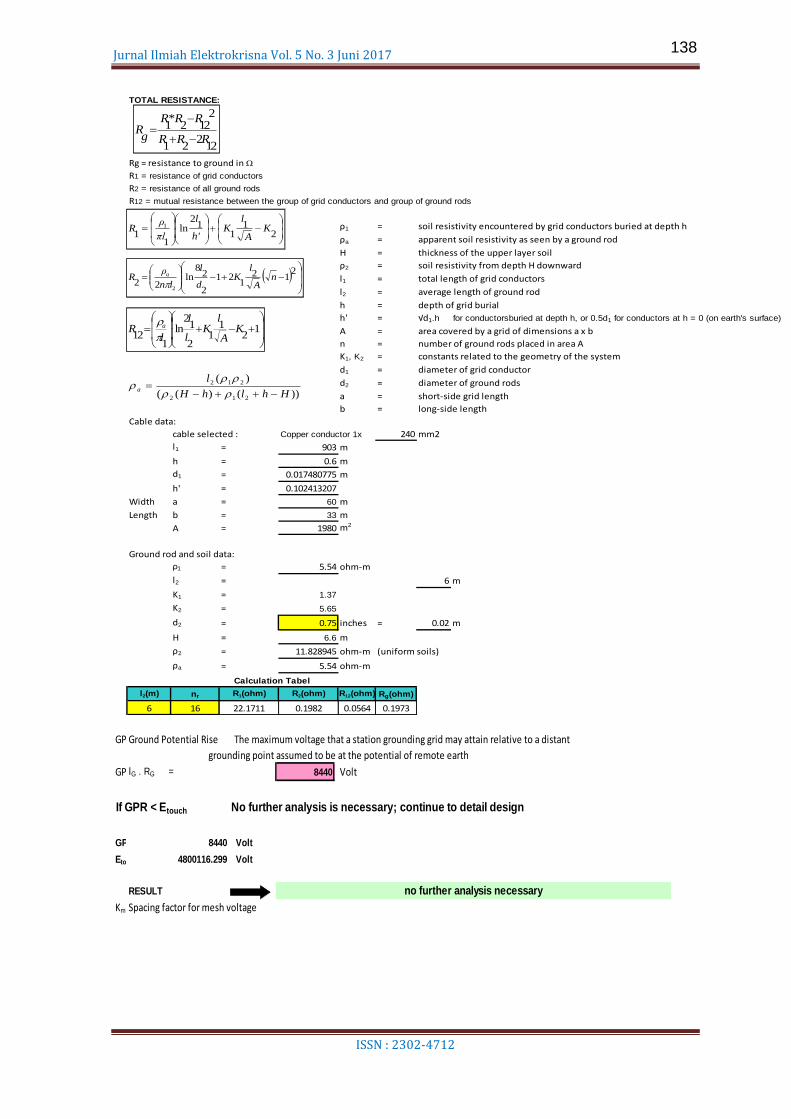
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
TOTAL RESISTANCE:
Rg = resistance to ground in W
R1 = resistance of grid conductors
R2 = resistance of all ground rods
R12 = mutual resistance between the group of grid conductors and group of ground rods
ρ1 = soil resistivity encountered by grid conductors buried at depth h
ρa = apparent soil resistivity as seen by a ground rod
H = thickness of the upper layer soil
ρ2 = soil resistivity from depth H downward
l1 = total length of grid conductors
l2 = average length of ground rod
h = depth of grid burial
h' = √d1.h for conductorsburied at depth h, or 0.5d1 for conductors at h = 0 (on earth's surface)
A = area covered by a grid of dimensions a x b
n = number of ground rods placed in area A
K1, K2 = constants related to the geometry of the system
d1 = diameter of grid conductor
d2 = diameter of ground rods
a = short-side grid length
b = long-side length
Cable data:
cable selected : Copper conductor 1x 240 mm2
l1 = 903 m
h = 0.6 m
d1 = 0.017480775 m
h' = 0.102413207
Width a = 60 m
Length b = 33 m
A = 1980 m2
Ground rod and soil data:
ρ1 = 5.54 ohm-m
l2 = 6 m
K1 = 1.37
K2 = 5.65
d2 = 0.75 inches = 0.02 m
H = 6.6 m
ρ2 = 11.828945 ohm-m (uniform soils)
ρa = 5.54 ohm-m
l2(m) nr R1(ohm) R2(ohm) R12(ohm) Rg(ohm)
6 16 22.1711 0.1982 0.0564 0.1973
Calculation Tabel
122
21
21221
RRR
R* RR
gR
212
121
2
28
ln22
2
nA
lK
d
l
ln
ρR a
1
21
12
12
ln
112
KA
lK
l
l
lR a
21
11
2ln
11
1 KA
lK
h'
l
πl
ρR
))()((
)(
212
212
HhlhH
la
GPRGround Potential Rise The maximum voltage that a station grounding grid may attain relative to a distant
grounding point assumed to be at the potential of remote earth
GPR =IG . RG = 8440 Volt
If GPR < Etouch No further analysis is necessary; continue to detail design
GPR = 8440 Volt
Etouch50 = 4800116.299 Volt
RESULT
Km Spacing factor for mesh voltage
no further analysis necessary
138
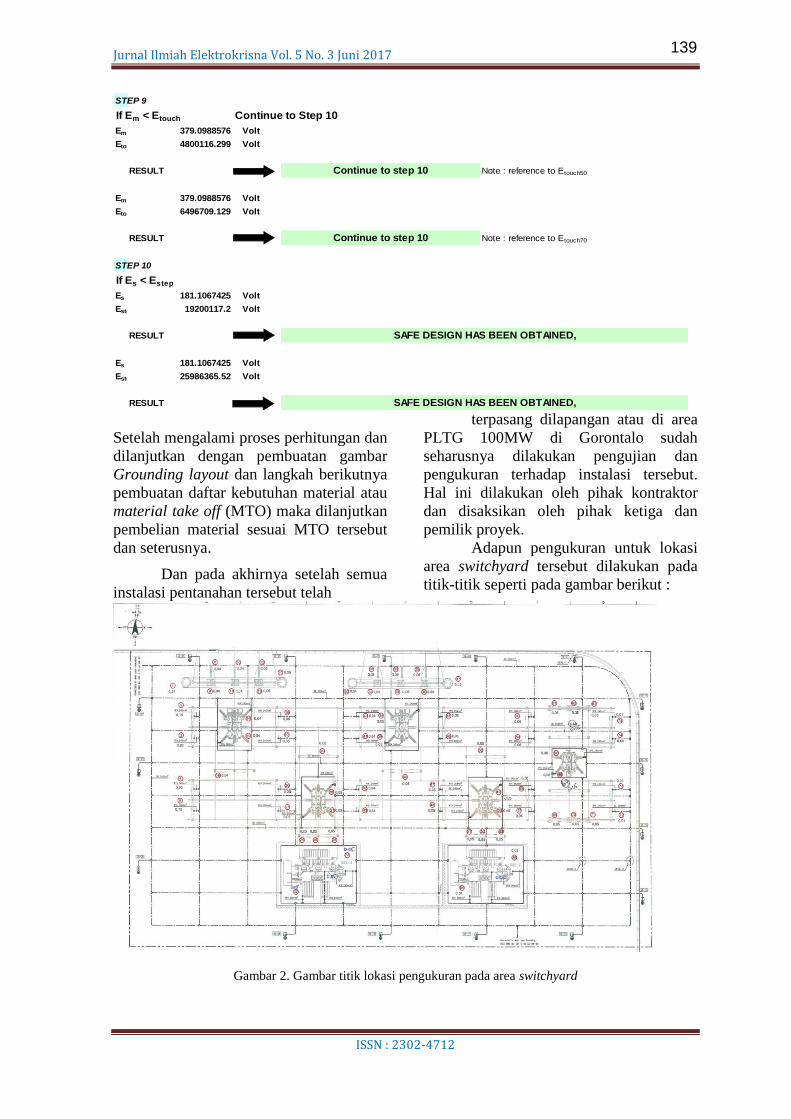
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
STEP 9
If Em < Etouch Continue to Step 10
Em = 379.0988576 Volt
Etouch50 = 4800116.299 Volt
RESULT Note : reference to Etouch50
Em = 379.0988576 Volt
Etouch70 = 6496709.129 Volt
RESULT Note : reference to Etouch70
STEP 10
If Es < Estep
Es = 181.1067425 Volt
Estep50 = 19200117.2 Volt
RESULT
Es = 181.1067425 Volt
Estep70 = 25986365.52 Volt
RESULT
Continue to step 10
SAFE DESIGN HAS BEEN OBTAINED,
SAFE DESIGN HAS BEEN OBTAINED,
Continue to step 10
Setelah mengalami proses perhitungan dan
dilanjutkan dengan pembuatan gambar
Grounding layout dan langkah berikutnya
pembuatan daftar kebutuhan material atau
material take off (MTO) maka dilanjutkan
pembelian material sesuai MTO tersebut
dan seterusnya.
Dan pada akhirnya setelah semua
instalasi pentanahan tersebut telah
terpasang dilapangan atau di area
PLTG 100MW di Gorontalo sudah
seharusnya dilakukan pengujian dan
pengukuran terhadap instalasi tersebut.
Hal ini dilakukan oleh pihak kontraktor
dan disaksikan oleh pihak ketiga dan
pemilik proyek.
Adapun pengukuran untuk lokasi
area switchyard tersebut dilakukan pada
titik-titik seperti pada gambar berikut :
Gambar 2. Gambar titik lokasi pengukuran pada area switchyard
139
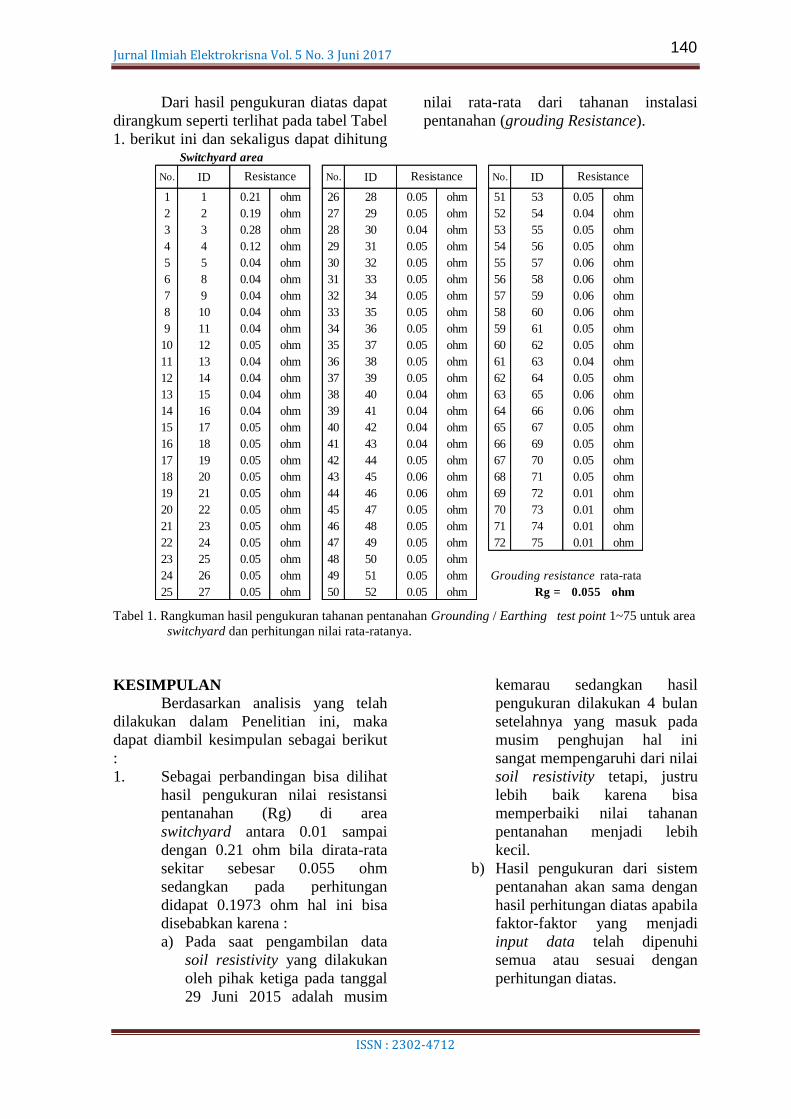
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Dari hasil pengukuran diatas dapat
dirangkum seperti terlihat pada tabel Tabel
1. berikut ini dan sekaligus dapat dihitung
nilai rata-rata dari tahanan instalasi
pentanahan (grouding Resistance).
Switchyard area
No. ID No. ID No. ID
1 1 0.21 ohm 26 28 0.05 ohm 51 53 0.05 ohm
2 2 0.19 ohm 27 29 0.05 ohm 52 54 0.04 ohm
3 3 0.28 ohm 28 30 0.04 ohm 53 55 0.05 ohm
4 4 0.12 ohm 29 31 0.05 ohm 54 56 0.05 ohm
5 5 0.04 ohm 30 32 0.05 ohm 55 57 0.06 ohm
6 8 0.04 ohm 31 33 0.05 ohm 56 58 0.06 ohm
7 9 0.04 ohm 32 34 0.05 ohm 57 59 0.06 ohm
8 10 0.04 ohm 33 35 0.05 ohm 58 60 0.06 ohm
9 11 0.04 ohm 34 36 0.05 ohm 59 61 0.05 ohm
10 12 0.05 ohm 35 37 0.05 ohm 60 62 0.05 ohm
11 13 0.04 ohm 36 38 0.05 ohm 61 63 0.04 ohm
12 14 0.04 ohm 37 39 0.05 ohm 62 64 0.05 ohm
13 15 0.04 ohm 38 40 0.04 ohm 63 65 0.06 ohm
14 16 0.04 ohm 39 41 0.04 ohm 64 66 0.06 ohm
15 17 0.05 ohm 40 42 0.04 ohm 65 67 0.05 ohm
16 18 0.05 ohm 41 43 0.04 ohm 66 69 0.05 ohm
17 19 0.05 ohm 42 44 0.05 ohm 67 70 0.05 ohm
18 20 0.05 ohm 43 45 0.06 ohm 68 71 0.05 ohm
19 21 0.05 ohm 44 46 0.06 ohm 69 72 0.01 ohm
20 22 0.05 ohm 45 47 0.05 ohm 70 73 0.01 ohm
21 23 0.05 ohm 46 48 0.05 ohm 71 74 0.01 ohm
22 24 0.05 ohm 47 49 0.05 ohm 72 75 0.01 ohm
23 25 0.05 ohm 48 50 0.05 ohm
24 26 0.05 ohm 49 51 0.05 ohm Grouding resistance rata-rata :
25 27 0.05 ohm 50 52 0.05 ohm Rg = 0.055 ohm
Resistance Resistance Resistance
Tabel 1. Rangkuman hasil pengukuran tahanan pentanahan Grounding / Earthing test point 1~75 untuk area
switchyard dan perhitungan nilai rata-ratanya.
KESIMPULAN Berdasarkan analisis yang telah
dilakukan dalam Penelitian ini, maka
dapat diambil kesimpulan sebagai berikut
:
1. Sebagai perbandingan bisa dilihat
hasil pengukuran nilai resistansi
pentanahan (Rg) di area
switchyard antara 0.01 sampai
dengan 0.21 ohm bila dirata-rata
sekitar sebesar 0.055 ohm
sedangkan pada perhitungan
didapat 0.1973 ohm hal ini bisa
disebabkan karena :
a) Pada saat pengambilan data
soil resistivity yang dilakukan
oleh pihak ketiga pada tanggal
29 Juni 2015 adalah musim
kemarau sedangkan hasil
pengukuran dilakukan 4 bulan
setelahnya yang masuk pada
musim penghujan hal ini
sangat mempengaruhi dari nilai
soil resistivity tetapi, justru
lebih baik karena bisa
memperbaiki nilai tahanan
pentanahan menjadi lebih
kecil.
b) Hasil pengukuran dari sistem
pentanahan akan sama dengan
hasil perhitungan diatas apabila
faktor-faktor yang menjadi
input data telah dipenuhi
semua atau sesuai dengan
perhitungan diatas.
140
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
2. Bila terjadi arus gangguan
seharusnya tidak sampai merusak
peralatan yang ada dalam instalasi
power plant tersebut dan apalagi
sampai mencelakai orang atau
operator yang berada dilingkungan
power plant tersebut dengan
memastikan nilai potensial
kenaikan tegangan (GPR) 8440
Volt dan tegangan mesh (Em)
379.0989 Volt serta tegangan
langkah (Es) 181.1067 Volt masih
lebih kecil dari tegangan sentuh
(Etouch50) 4800116 Volt dan
tegangan langkah yang diijinkan
Untuk orang 50kg (Estep50)
19200117 Volt sesuai dengan
prosedur yaitu:
a) GPR < Etouch50 b) Em < Etouch50 c) Es< Estep50
DAFTAR PUSTAKA
[1] Standard IEEE 80-2000, Guide for
Safety in AC Substation Grounding,
3 Park Avenue New York.
[2] Standard IEEE 142-199,
Recommended Practice for
Grounding Industrial and
Commercial Power system, 345 East
47th Street New York.
[3] Panitia PUIL, Persyaratan Umum
Instalasi Listrik 2000 (PUIL-2000),
Yayasan PUIL, Jakarta, 2000.
[4] Gijayaraghavan, Mark Brown,
Malcolm Barnes, 2004, Grounding,
Bonding, Sheilding and Surge
Protection, ELSEVIER.
[5] John D Mc Donal, 2003, Electric
Power Stations Engineering, CRC
Press, London.
[6] PT. Rekayasa Engineering 2015,
Grounding System Calculation -
Gorontalo Gas Fired Power Plant
100 MW.
[7] Fluke Corporation 2006, Prinsiple
Testing Method, and Applications,
Print in PO BOX 9090 Everett, WA-
USA.
[8] PT. Ride Dwg Indonesia 2015, Soil
Resistivity (Geoelctrical)
Investigation Final Report Power
Plant 100MW Gorontalo.
[9] PT. Rekayasa Engineering 2015,
Material take off - Gorontalo Gas
Fired Power Plant 100 MW.
[10] PT. Rekayasa Engineering 2015,
Short Circuit Calculation -
Gorontalo Gas Fired Power Plant
100 MW.
141

Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
ANALISA PENTANAHAN ELEKTRODA BATANG PADA STOP KONTAK
UNTUK MENEKAN BIAYA LISTRIK
Oleh : Nurhabibah Naibaho1
ABSTRAK Energi listrik adalah suatu energi yang sudah menjadi kebutuhan
pokok setiap masyarakat di seluruh dunia, dan akhir-akhir ini kebutuhan untuk listrik itu
sendiri semakin besar dan biaya juga semakin tinggi. Dampak dari pemakaian energi yang
cukup besar maka mengakibatkan krisis terhadap energi listrik. Maka dari itu salah satu
cara untuk mengurangi krisis energi listrik adalah dengan melakukan penghematan energi
listrik. Permasalahan yang ada adalah masalah biaya yang ditanggung oleh pelanggan
karena tarif dasar listrik yang semakin meningkat.
Tujuan penelitian ini untuk mencari solusi bagaimana mengurangi biaya rekening
listrik per KWHnya. Pada pengujian stop kontak dengan elektroda batang selama 2
jam/KWHnya 1,5 hasil perhitungan khw meter sedangkan pengujian stop kontak tanpa
elektroda batang selama 2 jam/KWHnya 2,2 hasil perhitungan kwh meter. Dalam 1 hari 12
jam maka 1,5 x 12 jam = 18 KWH dan 2,2 x 12 jam = 26,4 KWH. Diasumsikan harga
perkwhnya Rp. 300,00 dalam daya 2200VA maka hasil tersebut dikalikan 1 bulan, maka
hasil perhitungan tersebut menunjukkan hasil berbeda, antara stop kontak menggunakan
elektroda batang dengan stop kontak tanpa menggunakan elektroda batang dengan selisih
harga Rp. 75.600,00 dalam 1 bulanya. Jadi penggunaan stop kontak dengan elektroda
batang dapat menghemat atau menurunkan biaya rekening listrik, dan sekaligus juga dapat
sebagai pengaman.
ABSTRACT Electrical energy is an energy that has become a staple of every
society in the world, and finish the need for electricity itself is getting bigger and the cost is
also high better. The impact of energy consumption is big enough then lead to a crisis on
electrical energy. Thus one way to reduce the energy crisis is to make energy savings of
electricity. The problems that there are problems incurred by customers as the basic
electricity tariff increases.
The purpose of this study to find a solution how to reduce electric bill KWH. In the
test socket with the electrode rod for 2 hours / KWH 1.5 read calculation kwh meters while
testing the outlet without electrode rod for 2 hours / KWH 2.2 read calculation kwh meters.
Within 1 day 12 hours then 1.5 x 12 hours = 18 KWH and 2.2 x 12 hours = 26.4 KWH. In
The one KWH assumed price of Rp. 300.00 in the 2200VA then the result multiplied by one
month, then the results of these calculations show different results, the outlet using the
electrode rod into the outlet without using eletroda rod with a price difference of Rp.
75600.00 in 1 months. So the use of socket with eletroda rods can save or lower the cost of
electricity bills, and at the same time can also be a safety.
Keyword: Electrode Rod, kWh, Socket, Electricity Bill
I. PENDAHULUAN
1.1. Latar Belakang
Energi listrik sudah menjadi salah satu
kebutuhan pokok bagi masyarakat. Dampak
pemakaian energi yang cukup besar
mengakibatkan timbul krisis energi listrik.
Salah satu cara mengurangi krisis energi
listrik adalah dengan melakukan
penghematan energi listrik.
142
Jurnal Ilmiah ElektroKrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Permasalahan pada pemakaian
tenaga listrik adalah bagaimana solusi
yang diambil oleh pihak pelanggan dalam
menekan biaya listrik seiring tarif dasar
listrik yang semakin meningkat. Beberapa
peneliti menyatakan bahwa sistem
pentanahan diperlukan untuk mengurangi
kebocoran arus listrik, mendapatkan
tahanan kontak ke tanah sekecil mungkin
dan berfungsi sebagai pengaman.
1.2. Tujuan
Tujuan dari penelitian ini adalah untuk
mencari solusi bagaimana cara menurunkan
tagihan biaya listrik bagi pihak pelanggan
pada setiap bulannya agar lebih rendah dari
biaya tagihan rekening listrik pada
umumnya dan membuktikan bahwa stop
kontak di pasang pentanahan dengan
elektroda batang dapat menurunkan biaya
tagihan listrik setiap bulannya. Karena pada
umumnya pelanggan untuk kelas menengah
ke bawah (perumahan sederhana)
mengabaikan dengan adanya pentanahan,
karena dianggap tidak ada fungsi lain selain
untuk mengalirkan arus gangguan itu
mengalir ke tanah sebagai akibat isolasi
peralatan yang tidak berfungsi dengan baik.
2. TEORI DASAR
2.1 Sistem Petanahan
Sistem pentanahan atau biasa
disebut sebagai grounding system adalah
sistem pengamanan terhadap perangkat-
perangkat yang memper-gunakan listrik
sebagai sumber tenaga, dari lonjakan listrik
utamanya petir. Sistem pentanahan
digambarkan sebagai hubungan antara suatu
peralatan atau sirkit listrik dengan bumi.
Besar impedansi pentanahan
tersebut sangat dipengaruhi oleh banyak
faktor baik faktor internal atau eksternal.
Yang dimaksud dengan faktor internal
meliputi :
a. Dimensi konduktor pentanahan
(diameter atau panjangnya).
b. Resistivitas relative tanah.
c. Konfigurasi system pentanahan.
Yang dimaksud dengan faktor eksternal
meliputi :
a. Bentuk arusnya (pulsa, sinusoidal,
searah).
b. Frekuensi yang mengalir ke dalam
system pentanahan
Tujuan utama pentanahan adalah
menciptakan jalur yang low-impedance
(tahanan rendah) terhadap permukaan bumi
untuk gelombang listrik dan transient
voltage. Penerangan, arus listrik, circuit
switching dan electrostatic discharge adalah
penyebab umum dari adanya sentakan
listrik atau transient voltage. Sistem
pentanahan yang efektif akan
meminimalkan efek tersebut.
Menurut IEEE Std 142™-2007 4,
tujuan system pentanahan adalah:
a. Membatasi besarnya tegangan terhadap
bumi agar berada dalam batasan yang
diperbolehkan
b. Menyediakan jalur bagi aliran arus
yang dapat memberikan deteksi
terjadinya hubungan yang tidak
dikehendaki antara konduktor system
dan bumi. Deteksi ini akan
mengakibatkan beroperasinya peralatan
otomatis yang mem-utuskan suplai
tegangan dari konduktor tersebut.
Karakteristik sistem pentanahan yang
efektif antara lain adalah:
a. Terencana dengan baik, semua koneksi
yang terdapat pada sistem harus
merupakan koneksi yang sudah
direncanakan sebelumnya dengan
kaidah-kaidah tertentu.
b. Verifikasi secara visual dapat
dilakukan.
c. Menghindarkan gangguan yang terjadi
pada arus listrik dari perangkat.
d. Semua komponen metal harus
ditahan/diikat oleh sistem pentanahan,
dengan tujuan untuk meminimalkan
arus listrik melalui material yang
bersifat konduktif pada potensial listrik
yang sama.
143

Jurnal Ilmiah ElektroKrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
2.2. Bagian-bagian yang Ditanahkan
Dalam sebuah instalasi listrik ada
empat bagian yang harus ditanahkan atau
sering juga disebut dibumikan. Empat
bagian dari instalasi listrik ini adalah:
a. Semua bagian instalasi yang terbuat
dari logam (menghantar listrik) dan
dengan mudah bisa disentuh manusia.
Hal ini perlu agar potensial dari logam
yang mudah disentuh manusia selalu
sama dengan potensial tanah (bumi)
tempat manusia berpijak sehingga tidak
berbahaya bagi manusia yang
menyentuhnya.
b. Bagian pembuangan muatan listrik
(bagian bawah) dari lightning arrester.
Hal ini diperlukan agar lightning
arrester dapat berfungsi dengan baik,
yaitu membuang muatan listrik yang
diterimanya dari petir ke tanah (bumi)
dengan lancar.
c. Kawat petir yang ada pada bagian atas
saluran transmisi. Kawat petir ini
sesungguhnya juga berfungsi sebagai
lightning arrester. Karena letaknya
yang ada di sepanjang saluran
transmisi, maka semua kaki tiang
transmisi harus ditanahkan agar petir
yang menyambar kawat petir dapat
disalurkan ke tanah dengan lancar
melalui kaki tiang saluran transmisi.
d. Titik netral dari transformator atau titik
netral dari generator. Hal ini diperlukan
dalam kaitan dengan keperluan proteksi
khususnya yang menyangkut gangguan
hubung tanah. Dalam praktik,
diinginkan agar tahanan pentanahan
dari titik-titik pentanahan tersebut di
atas tidak melebihi 4 ohm. Secara
teoretis, tahanan dari tanah atau bumi
adalah nol karena luas penampang
bumi tak terhingga. Tetapi
kenyataannya tidak demikian, artinya
tahanan pentanahan nilainya tidak nol.
Hal ini terutama disebabkan oleh
adanya tahanan kontak antara alat
pentanahan dengan tanah di mana alat
tersebut dipasang (dalam tanah).
Syarat sistem pentanahan yang efektif :
a. Membuat jalur impedansi rendah ke
tanah untuk pengaman personil dan
peralatan dengan meng-gunakan
rangkaian yang efektif.
b. Dapat melawan dan menyebarkan
gangguan berulang dan arus akibat
surya hubung.
c. Menggunakan bahan tahan korosi
terhadap berbagai kondisi kimiawi
tanah, untuk memastikan kontinuitas
penampilan sepanjang umur peralatan
yang dilindungi.
d. Menggunakan system mekanik yang
kuat namun mudah dalam perawatan
dan perbaikan bila terjadi kerusakan.
Dalam system pentanahan semakin
kecil nilai tahanan maka semakin baik
terutama untuk pengamanan personal dan
peralatan, beberapa patoakan standar yang
telah disepakati adalah bahwa saluran
tranmisi substasion harus direncanakan
sedemikian rupa sehingga nilai tahanan
pentanahan tidak melebihi 1Ω untuk
digunakan pada aplikasi data dan
maksimum harga tahanan yang diijinkan
5Ω pada gedung. Kisi-kisi pentanahan
tergantung pada kerja ganda dan pasak yang
terhubung. Dari segi besarnya nilai tahanan
bahan yang dipakai pasak tidak mengurangi
besar tahanan pentanahan sistem namun
mempunyai fungsi tersendiri yang penting.
Bahannya sendiri mempunyai harga
impedansi awal beberapa kali lebih tinggi
daripada harga tahanannya terhadap tanah
pada frekuensi rendah. Bahan pentanahan
dimaksudkan untuk mengontrol dalam
batas aman sesuai peralatan yang
digunakan, sedangkan pasak adalah batang
sederhana, hal ini penyebab utama jatuhnya
tahanan tanah dalam gradient tegangan
yang tinggi pada permukaan pasak. Sebagai
akibat dari sifat ini maka pasak harus
ditempatkan didekat atau sekitar bangunan
station. Dalam saluran tegangan tinggi
(132KV) tahanan maksimalnya 15 ohm
masih dapat ditoleransi dan dalam saluran
distribusi (33-0,4 KV) dipilih tahanan 25
144
Jurnal Ilmiah ElektroKrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
ohm. Beberapa metode yang dapat
digunakan untuk menurunkan nilai tahanan
pentanahan antara lain dengan:
a. Sistem batang pararel
b. Sistem pasak tanam dalam dengan
beberapa pasak dan diperlakukan
terhadap kondisi kimiawi tanah.
c. Dengan menggunakan pelat tanam,
penghantar tanam, dan beton rangka
baja yang secara listrik terhubung.
2.3. Kontak Tanah
Bagian lain dari sistem hubungan
pentanahan yaitu tanah itu sendiri dimana
kontak antara tanah dengan pasak yang
tertanam harus cukup luas sehingga nilai
tahanan dari jalur arus yang masuk atau
melewati tanah masih dalam batas yang
diperkenankan untuk penggunaan tertentu.
Hambatan jenis tanah yang akan
menentukan tahanan pentanahan yang
dipengaruhi oleh beberapa faktor yang
meliputi :
a. Temperatur tanah
b. Besarnya arus yang melewati
c. Kandungan air dan bahan kimia yang
ada dalam tanah
d. Kelembaban tanah
e. Cuaca
Tahanan dari jalur tanah ini relative
rendah dan tetap sepanjang tahun. Untuk
memahami tahanan tanah harus rendah,
dapat dengan menggunakan hukum Ohm
yaitu :
E = I x R
Dimana : E adalah tegangan satuan volt I
adalah arus satuan ampere R adalah
tahanan satuan ohm
Hambatan arus melewati sistem
elektroda tanah mempunyai 3 komponen :
a. Tahanan pasaknya sendiri dan
sambungan-sambungannya.
b. Tahanan kontak antara pasak dengan
tanah disekitar.
c. Tahanan tanah sekelilingnya
Pasak-pasak tanah, batang logam,
struktur dan peralatan lain biasa digunakan
untuk elektroda tanah selain itu umumnya
ukurannya besar sehingga tahanannya dapat
terabaikan terhadap tahanan keseluruhan
sistem pentanahan. Apabila pasak ditanam
lebih dalam ke tanah maka tahanan akan
berkurang, namun bertambahnya diameter
pasak secara material tidak akan
mengurangi nilai tahanan karena nilai
tahanan elektroda pengtanahan tidak hanya
bergantung pada kedalaman dan luas
permukaan elektroda tapi juga pada tahanan
tanah.
Tahanan tanah merupakan kunci utama
yang menentukan tahanan elektrode dan
pada kedalaman berapa pasak harus
dipasang agar diperoleh tahanan yang
rendah. Elektrode baja digunakan sebagai
penghantar saluran distribusi dan
pentanahan substation.
Dalam memilih penghantar dapat
mempertimbangkan hal berikut :
a. Untuk tanah yang bersifat korosi sangat
lambat, dengan tahanan diatas 100
ohm-m, tidak ada batas perkenan
korosi (corosi allowance).
b. Untuk tanah yang bersifat korosi
lambat, dengan tahanan 25-100 ohm-m,
batas perkenan korosi adalah 15%
dengan pemilihan penghantar sudah
mem-pertimbangkan faktor stabilitas
thermal.
c. Untuk tanah yang bersifat korosi cepat,
dengan tahanan kurang dari 25 ohm-m,
batas perkenan korosi adalah 30%
dengan pemilihan penghantar sudah
mem-pertimbangkan faktor stabilitas
thermal.
d. Penghantar dapat dipilih dari ukuran
standar seperti 10 x 6mm sampai 65 x
8mm.
2.4. Elektroda Batang Elektroda batang ialah elektroda dari
pita atau besi baja profil yang dipasang
tegak lurus (vertikal) ke dalam tanah.
Umumnya digunakan batang tembaga
dengan diameter 5/8 inc sampai ¾ inc,
panjang 4m. Atau pipa galvanis dengan
diameter 1 inc sampai 2 inc, panjang 6m
(PUIL, 2000 : 80). Menurut Prih Sumardjati
(2008 : 168), elektroda batang ialah
145

Jurnal Ilmiah ElektroKrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
elektroda dari pipa atau besi baja profil
yang dipancangkan ke dalam tanah.
Elektroda ini merupakan elektroda yang
pertama kali digunakan dan teori-teori
berawal dari elektroda jenis ini. Elektroda
ini banyak digunakan di gardu induk-gardu
induk. Secara teknis, elektroda batang ini
mudah pemasangannya, yaitu tinggal
memancangkannya ke dalam tanah.
Disamping itu, elektroda ini tidak
memerlukan lahan yang luas.
Elektroda batang harus dipasang secara
tegak lurus kedalam tanah, dengan bagian
atas batang terletak 30cm di bawah
permukaan tanah. Panjang elektroda harus
disesuaikan dengan hambatan pentanahan
yang diperlukan. Untuk memperoleh nilai
hambatan pentanahan yang kecil, harus
diperlukan beberapa elektroda batang yang
pemasangannya jarak antara elektroda
tersebut minimum harus dua kali
panjangnya.
Elektroda bumi jenis batang bulat
yang terbuat dari batang baja berlapis
tembaga yang digunakan untuk
pembumian jaringan distribusi, gardu
distribusi dan instalasi (konsumen/rumah
tinggal) untuk pemanfaatan tenaga listrik
(SPLN 102, 1993 : pasal 1). Tujuannya
adalah untuk membatasi banyaknya
jenis, dimensi, dan mutu elektroda bumi
serta sekaligus memberikan pegangan
yang terarah bagi pemesan, pembuat,
maupun penguji (SPLN 102, 1993 : pasal
1).
Contoh rumus tahanan pentanahan
untuk elektroda Batang-Tunggal
Dimana :
L = Panjang Elektroda
Hb = Jarak Penanaman
D = Diameter elektroda
r = Jari-jari elektroda
ρ = Tahanan jenis tanah (ohm meter)
2.5 Perubahan Resistivitas Tanah
Seperti telah dijelaskan sebelumnya
bahwa resistivitas tanah sangat tergantung
dengan material pendukung tanah,
temperatur dan kelembaban. Daerah dengan
struktur tanah berpasir, berbatu dan
cenderung berstruktur tanah padas
mempunyai resistivitas yang tinggi.
Disinyalir kondisi tanah yang demikian
diakibatkan kerusakan yang terjadi di
permukaan tanah, berkurangnya tumbuhan-
tumbuhan yang dapat mengikat air
mengakibatkan kondisi tanah tandus dan
berkurang kelembabannya.
3. Penentuan titik pentanahan
Dalam menentukan titik pentanahan
dalam penelitian ini adalah pengamatan dan
pengukuran kondisi masing-masing tahanan
pentanahan yang meliputi nilai tahanan
pentanahan yang kita tanamkan di beberapa
titik tanah. Karena untuk masing-masing
titik pentanahan hasil dari tahanannya
berbeda. Metode pengukuran yang dipakai
adalah pengukuran dengan menggunakan
Earthester. Pengukuran ini menggunakan
dua buah elektroda bantu.
Pengukuran dilakukan dengan cara
sebagai berikut:
a. Terlebih dahulu menentukan jarak
antara elektroda pembumian dengan
elektroda bantu, jarak yang umum
digunakan berkisar 5-10 meter.
b. Setelah elektroda bantu ditancapkan di
tanah pada kedalaman sekitar 1m –
1,5m maka elektroda dihubungkan
dengan alat ukur dengan menggunakan
kabel yang sudah ditentukan.
c. Ada tiga warna kabel yaitu hijau,
kuning dan merah. Kabel warna hijau
salah satu ujungnya dihubungkan
dengan terminal earth pada alat ukur
dengan simbol E dan ujung satu lagi
dihubungkan dengan elektroda
pembumian. Kabel warna kuning
dihubungkan dengan terminal P
(potential) pada alat ukur dan ujung
yang lain dihubungkan dengan
elektroda bantu yang paling dekat ke
146
Jurnal Ilmiah ElektroKrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
elektroda utama. Kabel warna merah
dihubungkan ke terminal dengan
simbol C (Current) pada alat ukur dan
ujung yang lain dihubungkan dengan
elektroda bantu yang paling jauh dari
elektroda bantu.
d. Setelah semuanya terangkai dengan
benar maka pengukuran dapat
dilakukan tetapi perlu diperhatikan
dahulu apakah baterai dari alat ukur
masih baik atau tidak dan besar
tegangan rangkaian dengan memilih
selector yang tersedia di Earthmeter.
e. Apabila semua dalam kondisi baik
maka pengukuran tahanan pembumian
dapat dilakukan dengan menekan
tombol sw pada earthmeter setelah
terlebih dahulu memindahkan selector
ke sebelah symbol.
f. Putar piringan penunjuk besar
hambatan sampai jarum penunjuk telah
menunjuk angka nol dan nilai yang
ditunjukkan oleh piringan yang diputar
tersebut adalah nilai tahanan
pembumian yang terukur.
4 Tahap Pengambilan Data
Tujuan dari tahap ini untuk
memperoleh data nilai dari Rpentanahan. Data
Rpentanahan diperoleh dengan menggunakan
alat ukur yang telah ditentukan sebelumnya.
Mengukur tahanan pentanahan (Rpentanahan)
menggunakan Earth meter. Dalam
pengukuran ini yang harus diperhatikan
adalah jarak antara dua elektroda bantu,
yaitu diantara 5m – 10m. Setelah semua
saluran elektroda bantu dan saluran
elektroda tanah dihubungkan pada terminal
alat ukur maka pengukuran dapat segera
dilakukan. Hasil dari pengukuran dapat
dibaca pada Earthmeter yang telah
ditentukan. Setelah selesai, tekan tombol
stop-start untuk menghentikan pengukuran.
Hasil pengukuran menggunakan
Adapun rumus persamaannya adalah :
Dimana :
L = Panjang Elektroda
Hb = Jarak Penanaman
D = Diameter elektroda
r = Jari-jari elektroda
ρ = Tahanan jenis tanah (ohm meter)
Dalam pelaksanaan percobaan
penanaman pentanahan yang dilakukan
tahanan pentanahan untuk satu buah batang
elektrode yang ditanam tegak lurus kedalam
tanah adalah sebagai berikut :
Perhitungan pentanahan Elektroda
batang. Panjang elektrode (L) = 1,5 meter
Jarak Penanaman (Hb) = 5 meter
Diameter elektroda (D) = ¾ inch = 1,905 cm
Jari-jari elektrode (r) = 1,905/2 = 0,9525 cm
Tahanan jenis tanah ( ρ ) = 100 Ohm-meter untuk tanah
merah
= 11,1783 ohm
Jadi nilai perhitungan tahanan
pentanahan untuk satu buah batang
elektrode yang ditanam tegak lurus kedalam
tanah adalah 11,1783 Ohm. Karena
perhitungan nilai tahanan pentanahan
elekrode batang tunggal belum memenuhi
persyaratan PUIL 2000 yang mensyaratkan
bahwa pentanahan harus dibawah 5 Ohm.
Maka kita menambah pentanahan tambahan
untuk menghasilkan pentanahan yang
memenuhi persyaratan PUIL 2000 tersebut.
5. Bahan Penelitian
Data dan Karakteristik Bahan
diasumsikan sebagai berikut :
a. Jenis elektroda tanah : batang
tembaga
b. Diameter elektroda = ¾ inch =
1,905 cm
c. Panjang elektroda = 150 cm
d. Kondisi tanah, tanah merah padat
selama 2 hari tegangan normal
e. Sop kontak 13A/220V
f. Daya total = 2200 VA
147
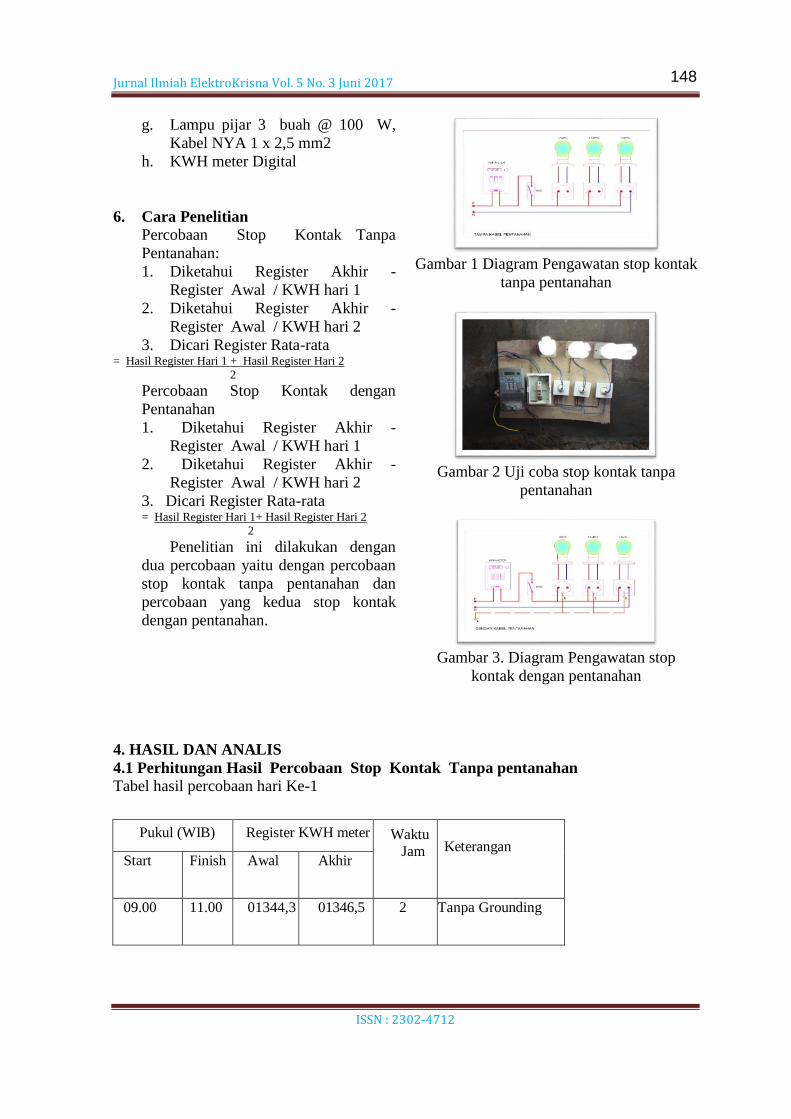
Jurnal Ilmiah ElektroKrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
g. Lampu pijar 3 buah @ 100 W,
Kabel NYA 1 x 2,5 mm2
h. KWH meter Digital
6. Cara Penelitian
Percobaan Stop Kontak Tanpa
Pentanahan:
1. Diketahui Register Akhir -
Register Awal / KWH hari 1
2. Diketahui Register Akhir -
Register Awal / KWH hari 2
3. Dicari Register Rata-rata = Hasil Register Hari 1 + Hasil Register Hari 2
2
Percobaan Stop Kontak dengan
Pentanahan
1. Diketahui Register Akhir -
Register Awal / KWH hari 1
2. Diketahui Register Akhir -
Register Awal / KWH hari 2
3. Dicari Register Rata-rata = Hasil Register Hari 1+ Hasil Register Hari 2
2
Penelitian ini dilakukan dengan
dua percobaan yaitu dengan percobaan
stop kontak tanpa pentanahan dan
percobaan yang kedua stop kontak
dengan pentanahan.
Gambar 1 Diagram Pengawatan stop kontak
tanpa pentanahan
Gambar 2 Uji coba stop kontak tanpa
pentanahan
Gambar 3. Diagram Pengawatan stop
kontak dengan pentanahan
4. HASIL DAN ANALIS
4.1 Perhitungan Hasil Percobaan Stop Kontak Tanpa pentanahan
Tabel hasil percobaan hari Ke-1
Pukul (WIB) Register KWH meter Waktu
Jam
Keterangan Start Finish Awal Akhir
09.00 11.00 01344,3 01346,5 2 Tanpa Grounding
148
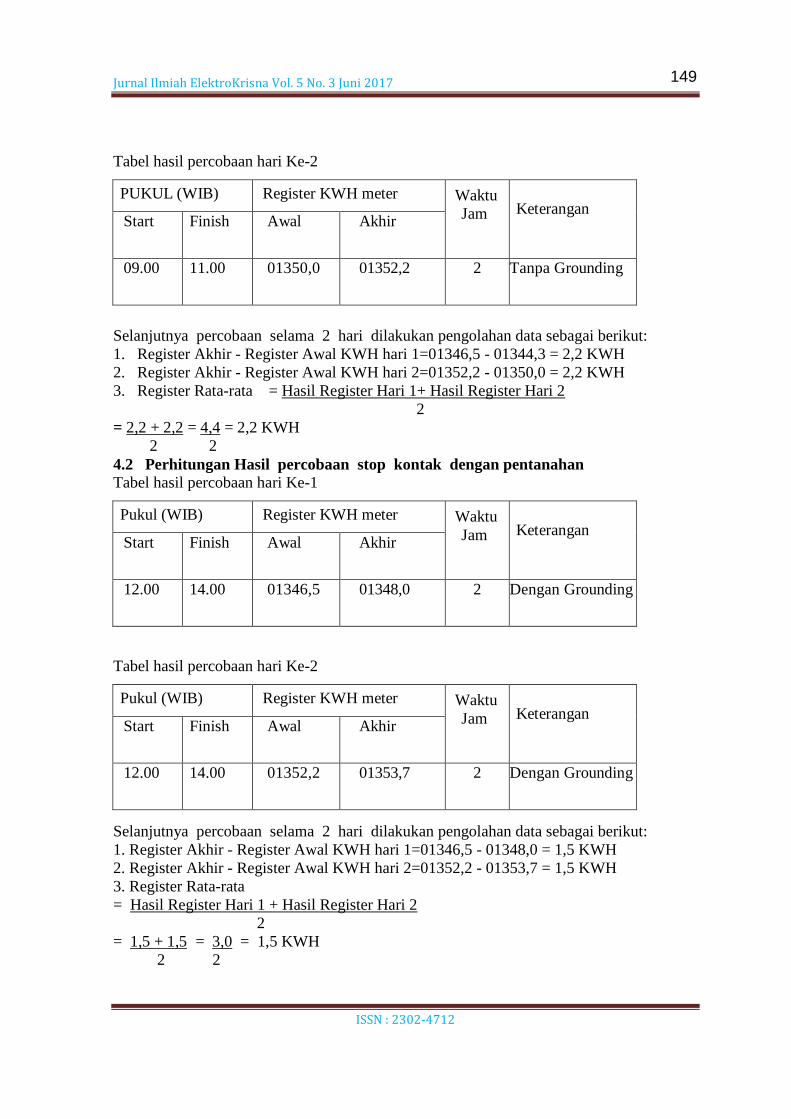
Jurnal Ilmiah ElektroKrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Tabel hasil percobaan hari Ke-2
Selanjutnya percobaan selama 2 hari dilakukan pengolahan data sebagai berikut:
1. Register Akhir - Register Awal KWH hari 1=01346,5 - 01344,3 = 2,2 KWH
2. Register Akhir - Register Awal KWH hari 2=01352,2 - 01350,0 = 2,2 KWH
3. Register Rata-rata = Hasil Register Hari 1+ Hasil Register Hari 2
2
= 2,2 + 2,2 = 4,4 = 2,2 KWH
2 2
4.2 Perhitungan Hasil percobaan stop kontak dengan pentanahan
Tabel hasil percobaan hari Ke-1
Tabel hasil percobaan hari Ke-2
Selanjutnya percobaan selama 2 hari dilakukan pengolahan data sebagai berikut:
1. Register Akhir - Register Awal KWH hari 1=01346,5 - 01348,0 = 1,5 KWH
2. Register Akhir - Register Awal KWH hari 2=01352,2 - 01353,7 = 1,5 KWH
3. Register Rata-rata
= Hasil Register Hari 1 + Hasil Register Hari 2
2
= 1,5 + 1,5 = 3,0 = 1,5 KWH
2 2
PUKUL (WIB) Register KWH meter Waktu
Jam
Keterangan Start Finish Awal Akhir
09.00 11.00 01350,0 01352,2 2 Tanpa Grounding
Pukul (WIB) Register KWH meter Waktu
Jam
Keterangan Start Finish Awal Akhir
12.00 14.00 01346,5 01348,0 2 Dengan Grounding
Pukul (WIB) Register KWH meter Waktu
Jam
Keterangan Start Finish Awal Akhir
12.00 14.00 01352,2 01353,7 2 Dengan Grounding
149
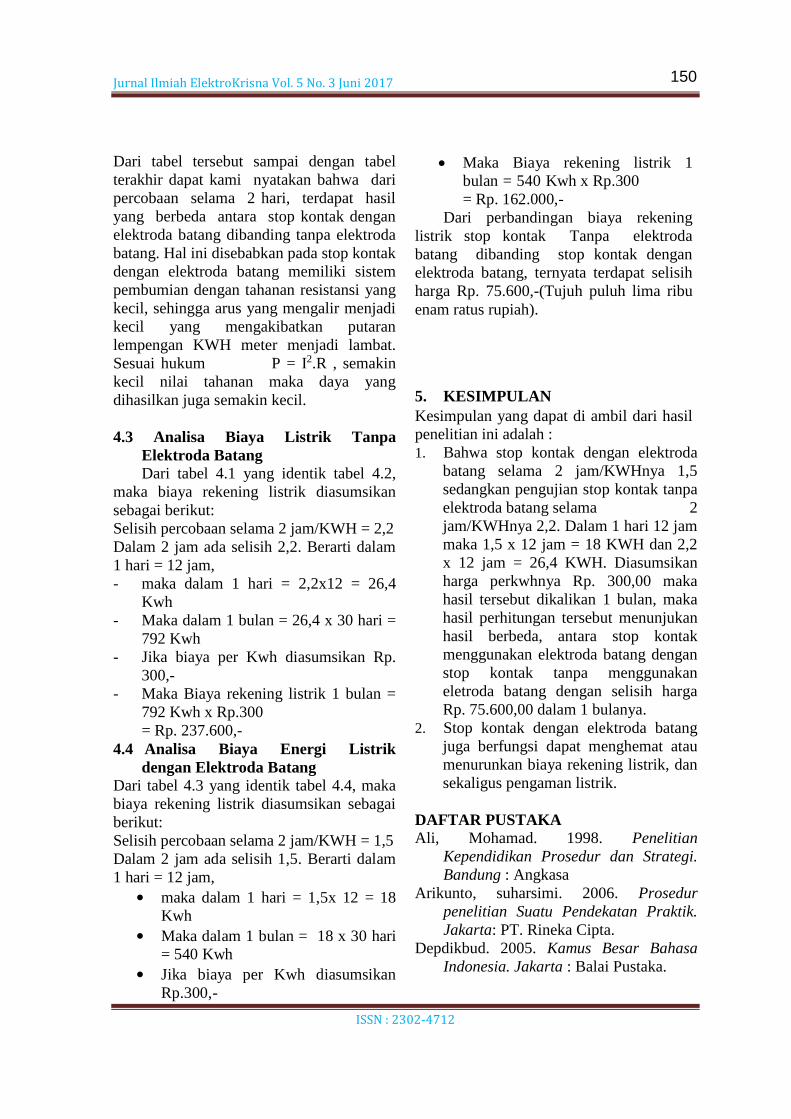
Jurnal Ilmiah ElektroKrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Dari tabel tersebut sampai dengan tabel
terakhir dapat kami nyatakan bahwa dari
percobaan selama 2 hari, terdapat hasil
yang berbeda antara stop kontak dengan
elektroda batang dibanding tanpa elektroda
batang. Hal ini disebabkan pada stop kontak
dengan elektroda batang memiliki sistem
pembumian dengan tahanan resistansi yang
kecil, sehingga arus yang mengalir menjadi
kecil yang mengakibatkan putaran
lempengan KWH meter menjadi lambat.
Sesuai hukum P = I2.R , semakin
kecil nilai tahanan maka daya yang
dihasilkan juga semakin kecil.
4.3 Analisa Biaya Listrik Tanpa
Elektroda Batang
Dari tabel 4.1 yang identik tabel 4.2,
maka biaya rekening listrik diasumsikan
sebagai berikut:
Selisih percobaan selama 2 jam/KWH = 2,2
Dalam 2 jam ada selisih 2,2. Berarti dalam
1 hari = 12 jam,
- maka dalam 1 hari = 2,2x12 = 26,4
Kwh
- Maka dalam 1 bulan = 26,4 x 30 hari =
792 Kwh
- Jika biaya per Kwh diasumsikan Rp.
300,-
- Maka Biaya rekening listrik 1 bulan =
792 Kwh x Rp.300
= Rp. 237.600,-
4.4 Analisa Biaya Energi Listrik
dengan Elektroda Batang
Dari tabel 4.3 yang identik tabel 4.4, maka
biaya rekening listrik diasumsikan sebagai
berikut:
Selisih percobaan selama 2 jam/KWH = 1,5
Dalam 2 jam ada selisih 1,5. Berarti dalam
1 hari = 12 jam,
maka dalam 1 hari = 1,5x 12 = 18
Kwh
Maka dalam 1 bulan = 18 x 30 hari
= 540 Kwh
Jika biaya per Kwh diasumsikan
Rp.300,-
Maka Biaya rekening listrik 1
bulan = 540 Kwh x Rp.300
= Rp. 162.000,-
Dari perbandingan biaya rekening
listrik stop kontak Tanpa elektroda
batang dibanding stop kontak dengan
elektroda batang, ternyata terdapat selisih
harga Rp. 75.600,-(Tujuh puluh lima ribu
enam ratus rupiah).
5. KESIMPULAN
Kesimpulan yang dapat di ambil dari hasil
penelitian ini adalah :
1. Bahwa stop kontak dengan elektroda
batang selama 2 jam/KWHnya 1,5
sedangkan pengujian stop kontak tanpa
elektroda batang selama 2
jam/KWHnya 2,2. Dalam 1 hari 12 jam
maka 1,5 x 12 jam = 18 KWH dan 2,2
x 12 jam = 26,4 KWH. Diasumsikan
harga perkwhnya Rp. 300,00 maka
hasil tersebut dikalikan 1 bulan, maka
hasil perhitungan tersebut menunjukan
hasil berbeda, antara stop kontak
menggunakan elektroda batang dengan
stop kontak tanpa menggunakan
eletroda batang dengan selisih harga
Rp. 75.600,00 dalam 1 bulanya.
2. Stop kontak dengan elektroda batang
juga berfungsi dapat menghemat atau
menurunkan biaya rekening listrik, dan
sekaligus pengaman listrik.
DAFTAR PUSTAKA
Ali, Mohamad. 1998. Penelitian
Kependidikan Prosedur dan Strategi.
Bandung : Angkasa
Arikunto, suharsimi. 2006. Prosedur
penelitian Suatu Pendekatan Praktik.
Jakarta: PT. Rineka Cipta.
Depdikbud. 2005. Kamus Besar Bahasa
Indonesia. Jakarta : Balai Pustaka.
150
Jurnal Ilmiah ElektroKrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
Nugroho, Andi. 2010. TahananPentanahan.
http: // seputarlistrik. blogspot. com/
2010/ 12/ pentanahan. html (di akses
tanggal 30 Juli 2011)
Panitia Revisi PUIL. 2000. Peraturan
Umum Instalasi Listrik 2000. Jakarta :
PLN
PLN. 1987. SPLN. 3: 1987 tentang
pentanahan jaringan tegangan rendah
dan pentanahan instalasi. Jakarta :
Dep. Pertamben dan PLN
PLN. 1993. SPLN. 102: 1993 tentang
elektoda bumi jenis batang bulat
berlapis tembaga. Jakarta : Dep.
Pertamben dan PLN
Sugiyono. 2009. Metode Penelitian
Kuantitatif Kualitatif R & D. Bandung :
Alfabeta
Sukardi. 2003. Metodologi Penelitian
Kependidikan. Yogyakarta : Bumi
Aksara
Thesandy. 2010. Pentanahan.
http://www.oocities.org/groundsys (di
akses tanggal 28 Juli 2011).
151
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
RANCANG BANGUN RANGKAIAN PENGENDALI LAMPU JARAK JAUH
MENGGUNAKAN BLUETOOTH
Oleh : Vita Nurdinawati1
ABSTRAK Handphone merupakan salah satu perangkat telekomunikasi yang sering kita
gunakan dalam kehidupan sehari-hari, namun pada era modern ini handphone dapat
digunakan berbagai macam aplikasi. Salah satunya ini adalah kegunaan handphone untuk
mengkontrol lampu jarak jauh bersama aplikasi Arduino Uno dan aplikasi Boarduino. Cara
mengkontrol lampu antara handphone dengan rangkaian arduino menggunakan media
bluetooth.
Dengan menggunakan rangkaian pengendali lampu jarak jauh ini kita
menghidupkan atau mematikan saklar pada relay dengan mudah dan menjadi lebih praktis
karena hanphone kita bisa digunakan sebagai remote controlnya. Rangakaian ini dapat kita
gunakan sampai jarak 10 meter. Dari hasil penelitian dan percobaan kita bisa
memperhatian respon pada load (lampu) ketika sinyal input pada aplikasi boarduino
bekerja (saklar on-off dioperasikan) lampu pun dapat menyala dengan respon yang cepat
tanpa adanya kendala jeda waktu yang lama.
ABSTRACT Mobile is one of the telecommunication devices that we often use in
everyday life, but in this modern era mobile phones can be used various applications. One
of them is the use of mobile phones to control the long-distance lamps along with Arduino
Uno applications and the Boarduino app. How to control the light between mobile phone
with arduino circuit using bluetooth media.
By using this series of remote light controller we turn on or off the switch on the
relay easily and become more practical because our cellphone can be used as a remote
controlnya. These we can use up to 10 meters. From the results of experiments and
experiments we can pay attention to the response on the load (lamp) when the input signal
on the application boarduino work (switch on-off operated) lights can be lighted with a fast
response without any lag time.
Kata Kunci : control lampu berbasis bluetooth, arduino
1. PENDAHULUAN
1.1. Latar Belakang
Perkembangan ilmu pengetahuan
yang sangat pesat memungkinkan praktisi
untuk selalu melakukan pemikiran-
pemikiran baru yang berguna antara lain
untuk membantu pekerjaan maupun
mempermudah kegiatan tertentu, ini
ditunjukan semakin majunya ilmu
pengetahuan dan ilmu teknologi dengan
bermunculnya alat-alat yang
menggunakan sistem digital dan
otomatis.
Elektronika adalah salah satu
teknologi yang membantu kehidupan
manusia agar menjadi lebih mudah.
Handphone merupakan perangkat
elektronika yang sering kita gunakan
dalam kehidupan sehari-hari. Dan pada
era modern ini handphone bisa digunakan
sebagai alat pengendali lampu jarak jauh
(sebagai remote control) dengan
dihubungkan menggunakan
microcontroller arduino.
Microcontroller arduino dan
handphone yang saling terhubung dengan
bluetooth dapat menjadi rangakaian
152
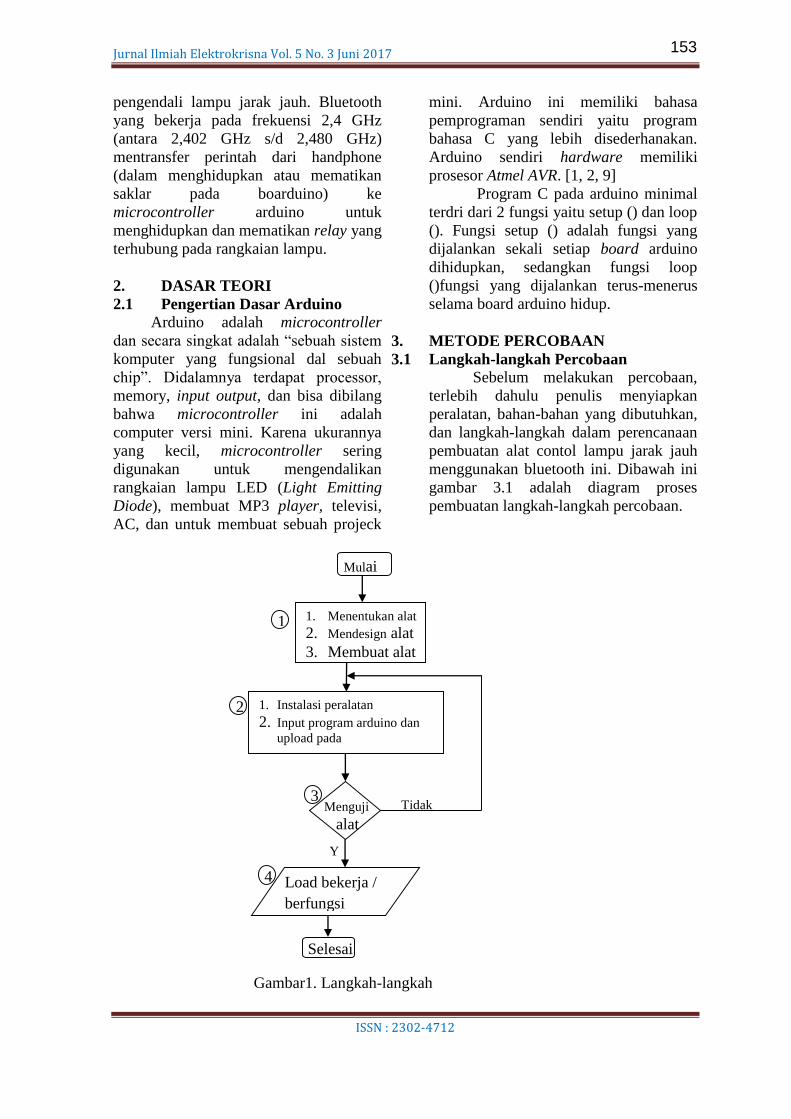
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
pengendali lampu jarak jauh. Bluetooth
yang bekerja pada frekuensi 2,4 GHz
(antara 2,402 GHz s/d 2,480 GHz)
mentransfer perintah dari handphone
(dalam menghidupkan atau mematikan
saklar pada boarduino) ke
microcontroller arduino untuk
menghidupkan dan mematikan relay yang
terhubung pada rangkaian lampu.
2. DASAR TEORI
2.1 Pengertian Dasar Arduino Arduino adalah microcontroller
dan secara singkat adalah “sebuah sistem
komputer yang fungsional dal sebuah
chip”. Didalamnya terdapat processor,
memory, input output, dan bisa dibilang
bahwa microcontroller ini adalah
computer versi mini. Karena ukurannya
yang kecil, microcontroller sering
digunakan untuk mengendalikan
rangkaian lampu LED (Light Emitting
Diode), membuat MP3 player, televisi,
AC, dan untuk membuat sebuah projeck
mini. Arduino ini memiliki bahasa
pemprograman sendiri yaitu program
bahasa C yang lebih disederhanakan.
Arduino sendiri hardware memiliki
prosesor Atmel AVR. [1, 2, 9]
Program C pada arduino minimal
terdri dari 2 fungsi yaitu setup () dan loop
(). Fungsi setup () adalah fungsi yang
dijalankan sekali setiap board arduino
dihidupkan, sedangkan fungsi loop
()fungsi yang dijalankan terus-menerus
selama board arduino hidup.
3. METODE PERCOBAAN
3.1 Langkah-langkah Percobaan
Sebelum melakukan percobaan,
terlebih dahulu penulis menyiapkan
peralatan, bahan-bahan yang dibutuhkan,
dan langkah-langkah dalam perencanaan
pembuatan alat contol lampu jarak jauh
menggunakan bluetooth ini. Dibawah ini
gambar 3.1 adalah diagram proses
pembuatan langkah-langkah percobaan.
Y
a
Gambar1. Langkah-langkah
percobaan
Selesai
Load bekerja /
berfungsi
(On/Off)
4
Tidak 3
2
Menguji
alat
1
1. Instalasi peralatan
2. Input program arduino dan
upload pada microcontroller
Mulai
1. Menentukan alat
2. Mendesign alat
3. Membuat alat
153
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
1. Menetukan peralatan, mendesign dan
membuat alat dalam percobaan dilakukan
setelah membaca teori dasar. Peralatan
dan komponen apa saja yang dipakai
dalam melakukan percobaan.
2. Melakukan instalasi pada komponen dan
bahan-bahan yang disediakan
berdasarkan teori yang dipelajari.
Membuat program yang akan diinput
pada microcontroller arduino untuk
menjalankan fungsi sebagai rangkaian
pengendali lampu jarak jauh.
3. Menguji percobaan, setelah melakukan
instalasi pada peralatan langkah
selanjutnya adalah melakukan uji coba
pada alat tersebut. Menguji apakah
rangkaian pengendali lampu jarak jauh
menggunakan bluetooth ini dapat bekerja
dengan baik dapat menghidupkan /
mematikan load (lampu) ketika saklar
pada handphone ditouch (On/Off). Bila
rangkaian tidak berfungsi, maka hal yang
dilakukan adalah mengecek ulang proses
instalasi pada rangkaian ini, apakah
terjadi kesalahan dalam instalasi ataupun
salah dalam upload dan download
program saat instalasi. Bila rangkaian
berfungsi maka, load (lampu) akan
bekerja sesuai perintah yang diberikan.
4. Load (lampu) on/off setelah diberi sinyal
dari handphone dan rangkaian pengendali
microcontroller.
3.2 Cara Kerja Pada Rangkian Pengendali
Berikut ini adalah diagram kurva
penjelasan mengenai step langkah cara
kerja rangkaian pengendali lampu jarak
jauh menggunakan bluetooth (gambar2)
154
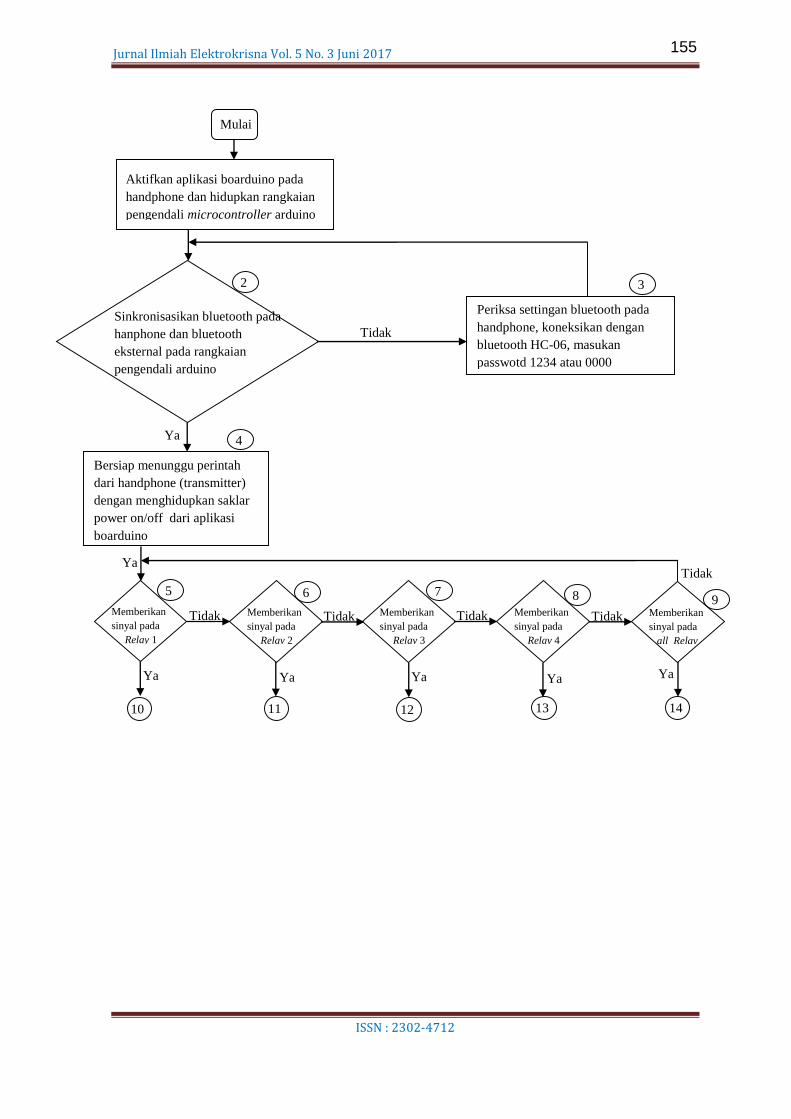
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
5 6 7 8 9
11 10 12 13 14
Bersiap menunggu perintah
dari handphone (transmitter)
dengan menghidupkan saklar
power on/off dari aplikasi
boarduino
4 Ya
Ya
Tidak Tidak Tidak Tidak Memberikan
sinyal pada
Relay 1
Memberikan
sinyal pada
Relay 3
Memberikan
sinyal pada
Relay 4
Memberikan
sinyal pada
Relay 2
Memberikan
sinyal pada
all Relay
Tidak
Ya Ya Ya Ya Ya
Tidak
3
Periksa settingan bluetooth pada
handphone, koneksikan dengan
bluetooth HC-06, masukan
passwotd 1234 atau 0000
Mulai
2
Sinkronisasikan bluetooth pada
hanphone dan bluetooth
eksternal pada rangkaian
pengendali arduino
Aktifkan aplikasi boarduino pada
handphone dan hidupkan rangkaian
pengendali microcontroller arduino
155
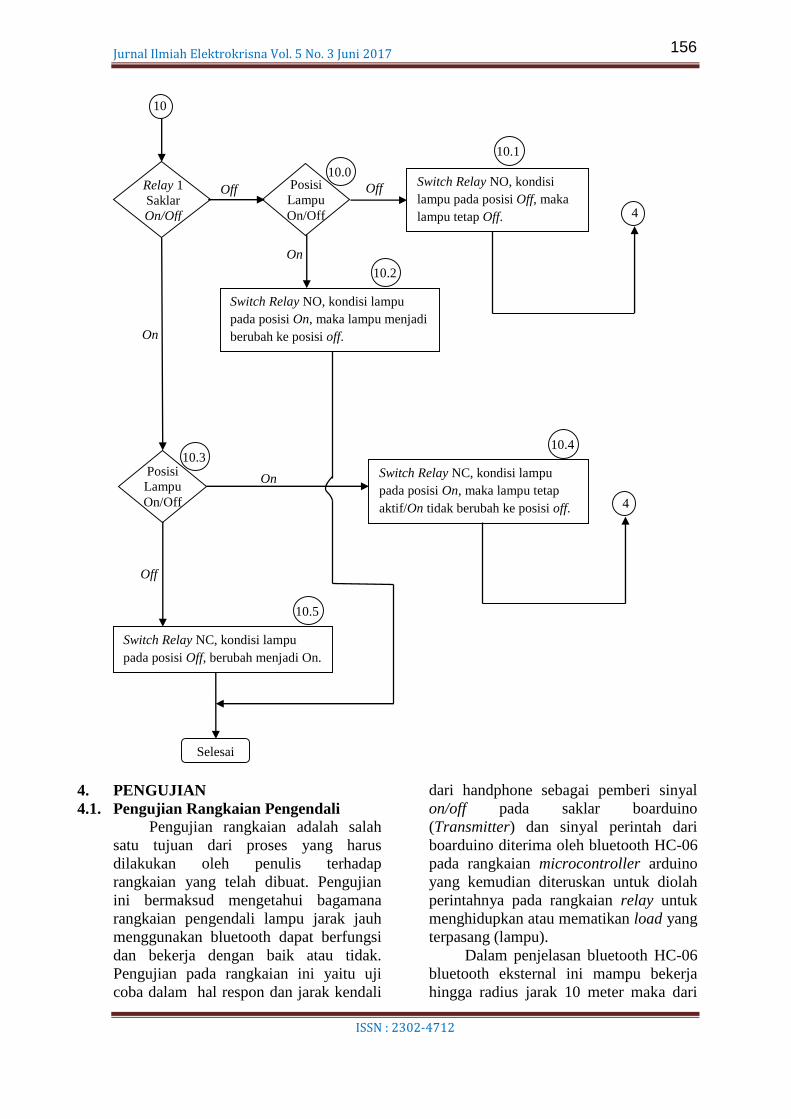
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
4. PENGUJIAN
4.1. Pengujian Rangkaian Pengendali
Pengujian rangkaian adalah salah
satu tujuan dari proses yang harus
dilakukan oleh penulis terhadap
rangkaian yang telah dibuat. Pengujian
ini bermaksud mengetahui bagamana
rangkaian pengendali lampu jarak jauh
menggunakan bluetooth dapat berfungsi
dan bekerja dengan baik atau tidak.
Pengujian pada rangkaian ini yaitu uji
coba dalam hal respon dan jarak kendali
dari handphone sebagai pemberi sinyal
on/off pada saklar boarduino
(Transmitter) dan sinyal perintah dari
boarduino diterima oleh bluetooth HC-06
pada rangkaian microcontroller arduino
yang kemudian diteruskan untuk diolah
perintahnya pada rangkaian relay untuk
menghidupkan atau mematikan load yang
terpasang (lampu).
Dalam penjelasan bluetooth HC-06
bluetooth eksternal ini mampu bekerja
hingga radius jarak 10 meter maka dari
10
10.0
10.1
10.2
10.3 10.4
10.5
Relay 1
Saklar
On/Off
On
Posisi
Lampu
On/Off
Off
On
Switch Relay NO, kondisi
lampu pada posisi Off, maka
lampu tetap Off.
Posisi
Lampu
On/Off
Switch Relay NC, kondisi lampu
pada posisi On, maka lampu tetap
aktif/On tidak berubah ke posisi off.
Off
On
Off
Switch Relay NC, kondisi lampu
pada posisi Off, berubah menjadi On.
4
4
Selesai
Switch Relay NO, kondisi lampu
pada posisi On, maka lampu menjadi
berubah ke posisi off.
156
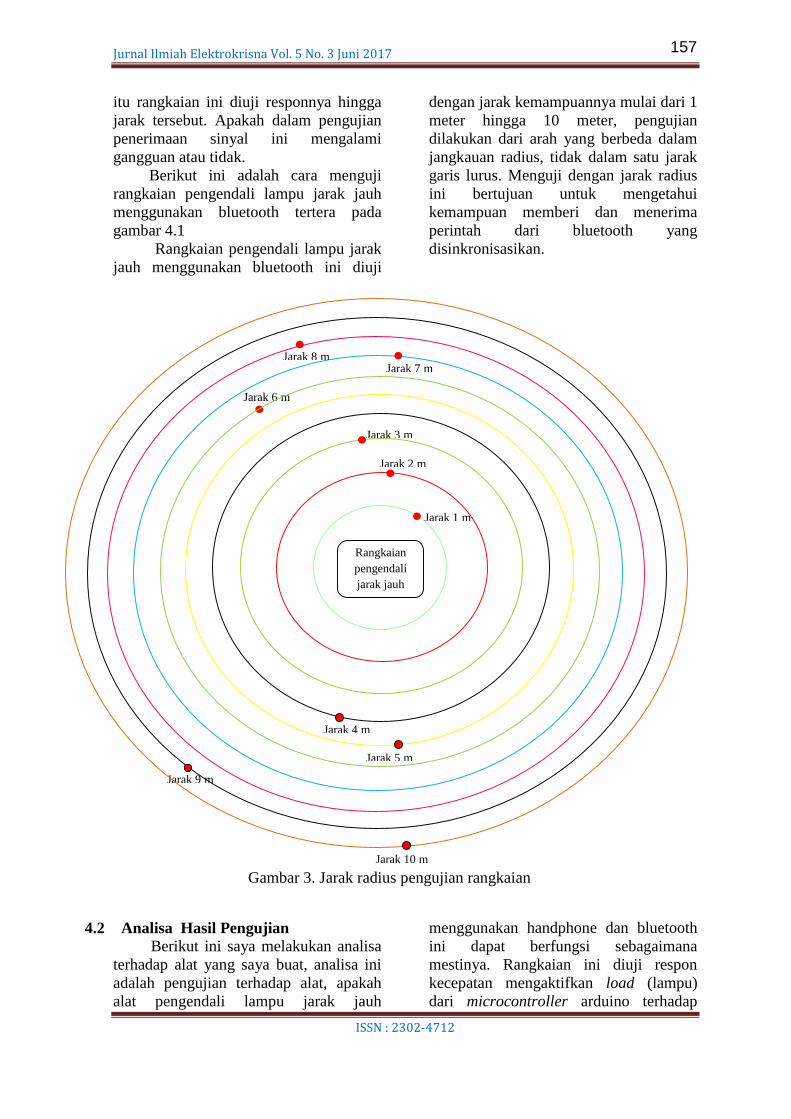
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
itu rangkaian ini diuji responnya hingga
jarak tersebut. Apakah dalam pengujian
penerimaan sinyal ini mengalami
gangguan atau tidak.
Berikut ini adalah cara menguji
rangkaian pengendali lampu jarak jauh
menggunakan bluetooth tertera pada
gambar 4.1
Rangkaian pengendali lampu jarak
jauh menggunakan bluetooth ini diuji
dengan jarak kemampuannya mulai dari 1
meter hingga 10 meter, pengujian
dilakukan dari arah yang berbeda dalam
jangkauan radius, tidak dalam satu jarak
garis lurus. Menguji dengan jarak radius
ini bertujuan untuk mengetahui
kemampuan memberi dan menerima
perintah dari bluetooth yang
disinkronisasikan.
4.2 Analisa Hasil Pengujian
Berikut ini saya melakukan analisa
terhadap alat yang saya buat, analisa ini
adalah pengujian terhadap alat, apakah
alat pengendali lampu jarak jauh
menggunakan handphone dan bluetooth
ini dapat berfungsi sebagaimana
mestinya. Rangkaian ini diuji respon
kecepatan mengaktifkan load (lampu)
dari microcontroller arduino terhadap
Jarak 6 m
Rangkaian
pengendali
jarak jauh
Jarak 1 m
Jarak 2 m
Jarak 3 m
Jarak 4 m
Jarak 5 m
Jarak 7 m Jarak 8 m
Jarak 9 m
Jarak 10 m
Gambar 3. Jarak radius pengujian rangkaian
157
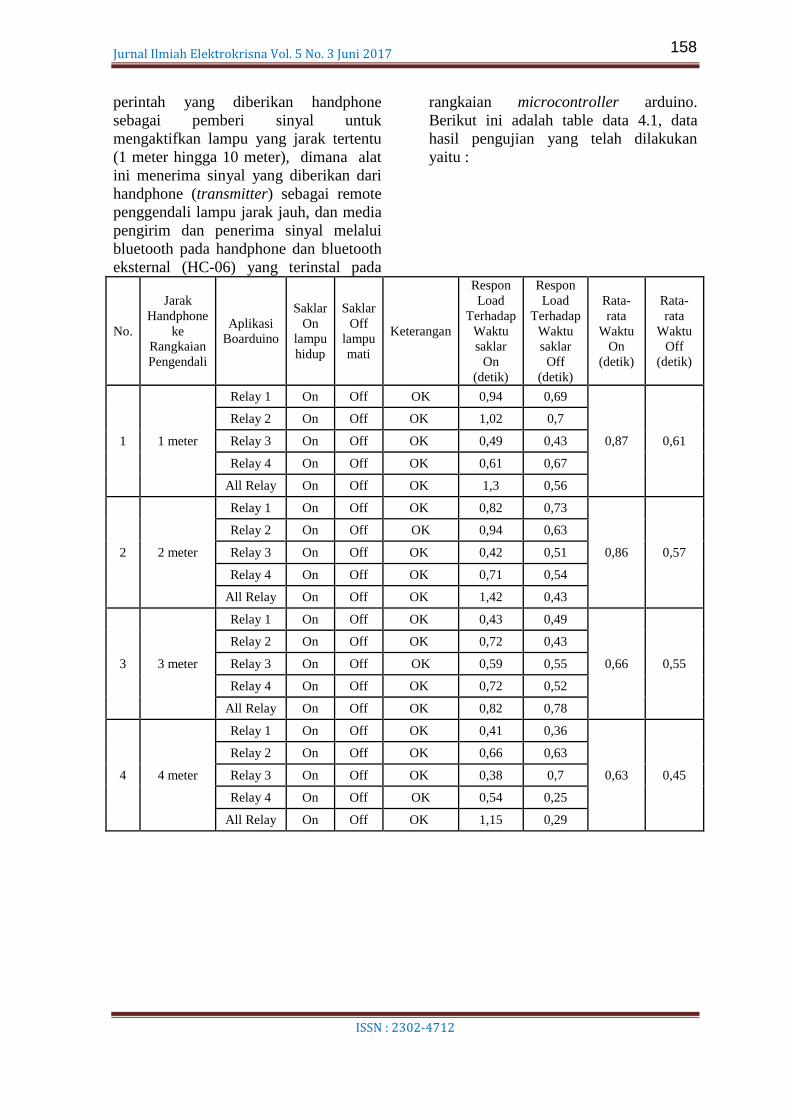
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
perintah yang diberikan handphone
sebagai pemberi sinyal untuk
mengaktifkan lampu yang jarak tertentu
(1 meter hingga 10 meter), dimana alat
ini menerima sinyal yang diberikan dari
handphone (transmitter) sebagai remote
penggendali lampu jarak jauh, dan media
pengirim dan penerima sinyal melalui
bluetooth pada handphone dan bluetooth
eksternal (HC-06) yang terinstal pada
rangkaian microcontroller arduino.
Berikut ini adalah table data 4.1, data
hasil pengujian yang telah dilakukan
yaitu :
No.
Jarak
Handphone
ke
Rangkaian
Pengendali
Aplikasi
Boarduino
Saklar
On
lampu
hidup
Saklar
Off
lampu
mati
Keterangan
Respon
Load
Terhadap
Waktu
saklar
On
(detik)
Respon
Load
Terhadap
Waktu
saklar
Off
(detik)
Rata-
rata
Waktu
On
(detik)
Rata-
rata
Waktu
Off
(detik)
1 1 meter
Relay 1 On Off OK 0,94 0,69
0,87 0,61
Relay 2 On Off OK 1,02 0,7
Relay 3 On Off OK 0,49 0,43
Relay 4 On Off OK 0,61 0,67
All Relay On Off OK 1,3 0,56
2 2 meter
Relay 1 On Off OK 0,82 0,73
0,86 0,57
Relay 2 On Off OK 0,94 0,63
Relay 3 On Off OK 0,42 0,51
Relay 4 On Off OK 0,71 0,54
All Relay On Off OK 1,42 0,43
3 3 meter
Relay 1 On Off OK 0,43 0,49
0,66 0,55
Relay 2 On Off OK 0,72 0,43
Relay 3 On Off OK 0,59 0,55
Relay 4 On Off OK 0,72 0,52
All Relay On Off OK 0,82 0,78
4 4 meter
Relay 1 On Off OK 0,41 0,36
0,63 0,45
Relay 2 On Off OK 0,66 0,63
Relay 3 On Off OK 0,38 0,7
Relay 4 On Off OK 0,54 0,25
All Relay On Off OK 1,15 0,29
158
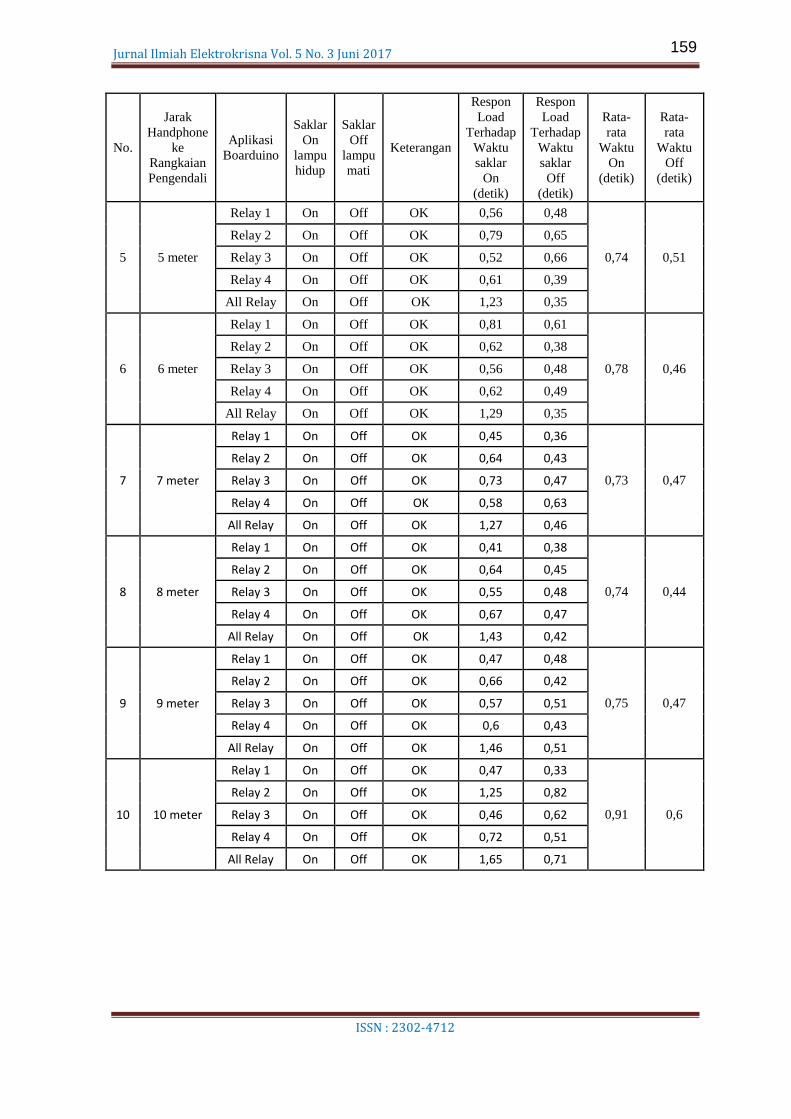
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
No.
Jarak
Handphone
ke
Rangkaian
Pengendali
Aplikasi
Boarduino
Saklar
On
lampu
hidup
Saklar
Off
lampu
mati
Keterangan
Respon
Load
Terhadap
Waktu
saklar
On
(detik)
Respon
Load
Terhadap
Waktu
saklar
Off
(detik)
Rata-
rata
Waktu
On
(detik)
Rata-
rata
Waktu
Off
(detik)
5 5 meter
Relay 1 On Off OK 0,56 0,48
0,74 0,51
Relay 2 On Off OK 0,79 0,65
Relay 3 On Off OK 0,52 0,66
Relay 4 On Off OK 0,61 0,39
All Relay On Off OK 1,23 0,35
6 6 meter
Relay 1 On Off OK 0,81 0,61
0,78 0,46
Relay 2 On Off OK 0,62 0,38
Relay 3 On Off OK 0,56 0,48
Relay 4 On Off OK 0,62 0,49
All Relay On Off OK 1,29 0,35
7 7 meter
Relay 1 On Off OK 0,45 0,36
0,73 0,47
Relay 2 On Off OK 0,64 0,43
Relay 3 On Off OK 0,73 0,47
Relay 4 On Off OK 0,58 0,63
All Relay On Off OK 1,27 0,46
8 8 meter
Relay 1 On Off OK 0,41 0,38
0,74 0,44
Relay 2 On Off OK 0,64 0,45
Relay 3 On Off OK 0,55 0,48
Relay 4 On Off OK 0,67 0,47
All Relay On Off OK 1,43 0,42
9 9 meter
Relay 1 On Off OK 0,47 0,48
0,75 0,47
Relay 2 On Off OK 0,66 0,42
Relay 3 On Off OK 0,57 0,51
Relay 4 On Off OK 0,6 0,43
All Relay On Off OK 1,46 0,51
10 10 meter
Relay 1 On Off OK 0,47 0,33
0,91 0,6
Relay 2 On Off OK 1,25 0,82
Relay 3 On Off OK 0,46 0,62
Relay 4 On Off OK 0,72 0,51
All Relay On Off OK 1,65 0,71
159
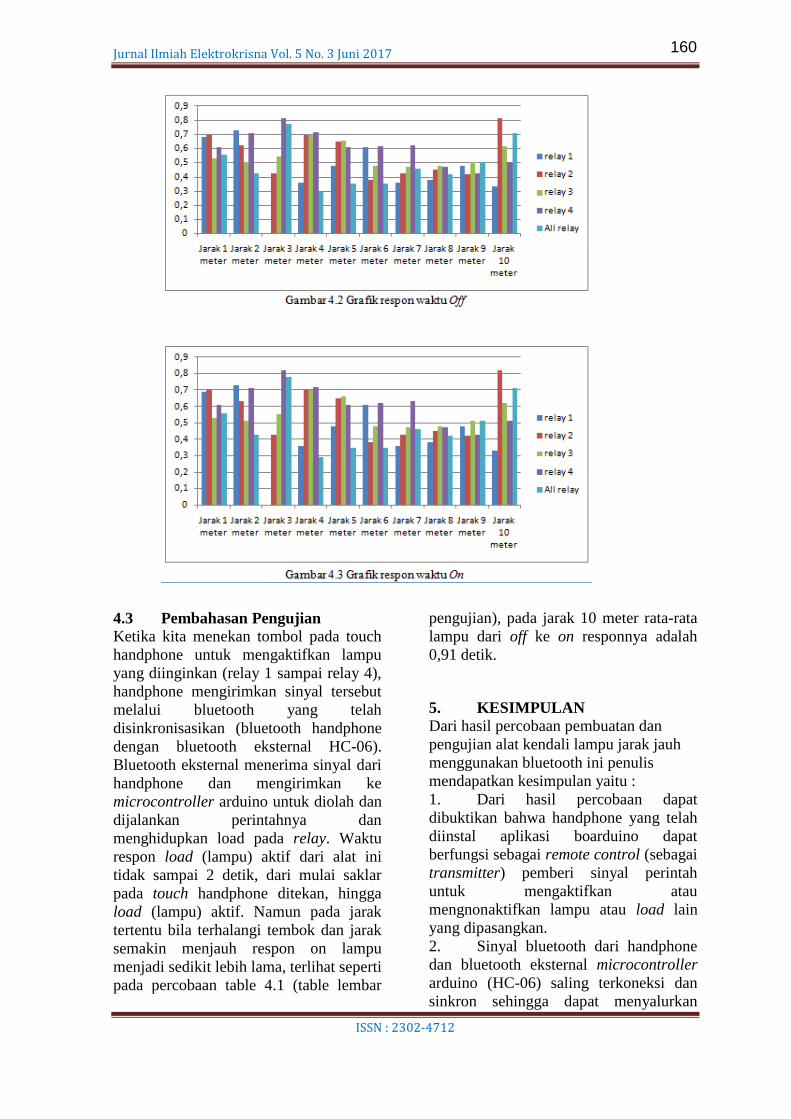
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
4.3 Pembahasan Pengujian
Ketika kita menekan tombol pada touch
handphone untuk mengaktifkan lampu
yang diinginkan (relay 1 sampai relay 4),
handphone mengirimkan sinyal tersebut
melalui bluetooth yang telah
disinkronisasikan (bluetooth handphone
dengan bluetooth eksternal HC-06).
Bluetooth eksternal menerima sinyal dari
handphone dan mengirimkan ke
microcontroller arduino untuk diolah dan
dijalankan perintahnya dan
menghidupkan load pada relay. Waktu
respon load (lampu) aktif dari alat ini
tidak sampai 2 detik, dari mulai saklar
pada touch handphone ditekan, hingga
load (lampu) aktif. Namun pada jarak
tertentu bila terhalangi tembok dan jarak
semakin menjauh respon on lampu
menjadi sedikit lebih lama, terlihat seperti
pada percobaan table 4.1 (table lembar
pengujian), pada jarak 10 meter rata-rata
lampu dari off ke on responnya adalah
0,91 detik.
5. KESIMPULAN
Dari hasil percobaan pembuatan dan
pengujian alat kendali lampu jarak jauh
menggunakan bluetooth ini penulis
mendapatkan kesimpulan yaitu :
1. Dari hasil percobaan dapat
dibuktikan bahwa handphone yang telah
diinstal aplikasi boarduino dapat
berfungsi sebagai remote control (sebagai
transmitter) pemberi sinyal perintah
untuk mengaktifkan atau
mengnonaktifkan lampu atau load lain
yang dipasangkan.
2. Sinyal bluetooth dari handphone
dan bluetooth eksternal microcontroller
arduino (HC-06) saling terkoneksi dan
sinkron sehingga dapat menyalurkan
160
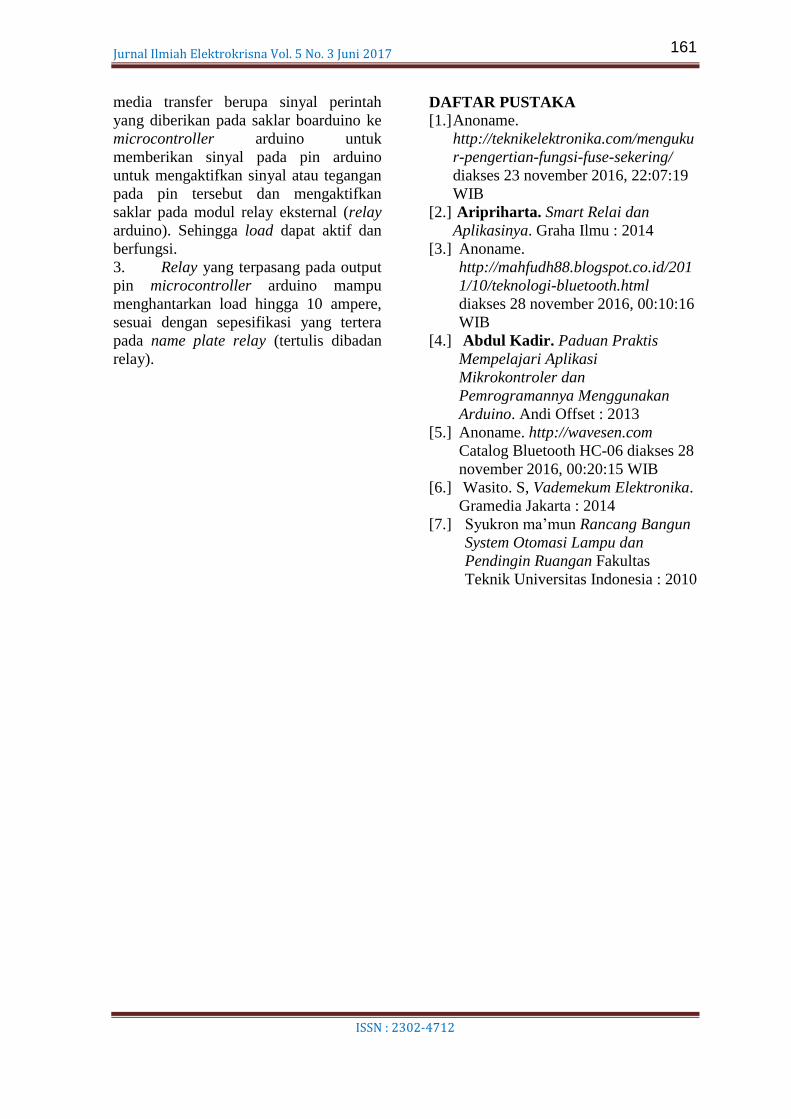
Jurnal Ilmiah Elektrokrisna Vol. 5 No. 3 Juni 2017
ISSN : 2302-4712
media transfer berupa sinyal perintah
yang diberikan pada saklar boarduino ke
microcontroller arduino untuk
memberikan sinyal pada pin arduino
untuk mengaktifkan sinyal atau tegangan
pada pin tersebut dan mengaktifkan
saklar pada modul relay eksternal (relay
arduino). Sehingga load dapat aktif dan
berfungsi.
3. Relay yang terpasang pada output
pin microcontroller arduino mampu
menghantarkan load hingga 10 ampere,
sesuai dengan sepesifikasi yang tertera
pada name plate relay (tertulis dibadan
relay).
DAFTAR PUSTAKA
[1.] Anoname.
http://teknikelektronika.com/menguku
r-pengertian-fungsi-fuse-sekering/
diakses 23 november 2016, 22:07:19
WIB
[2.] Aripriharta. Smart Relai dan
Aplikasinya. Graha Ilmu : 2014
[3.] Anoname.
http://mahfudh88.blogspot.co.id/201
1/10/teknologi-bluetooth.html
diakses 28 november 2016, 00:10:16
WIB
[4.] Abdul Kadir. Paduan Praktis
Mempelajari Aplikasi
Mikrokontroler dan
Pemrogramannya Menggunakan
Arduino. Andi Offset : 2013
[5.] Anoname. http://wavesen.com
Catalog Bluetooth HC-06 diakses 28
november 2016, 00:20:15 WIB
[6.] Wasito. S, Vademekum Elektronika.
Gramedia Jakarta : 2014
[7.] Syukron ma’mun Rancang Bangun
System Otomasi Lampu dan
Pendingin Ruangan Fakultas
Teknik Universitas Indonesia : 2010
161
Related Documents











