Kooler Kart ADTRAN Senior Design Show Case April 25, 2014

Joseph Ratliff EE Software Research PCB Design Obstacle Detection Motion Detection Ryan Crownover EE Coding Logic Motion System Software Design Website.
Jan 19, 2016
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Kooler Kart
ADTRAN Senior Design Show Case April 25, 2014

Team Members
Joseph Ratliff•EE•Software Research•PCB Design•Obstacle Detection•Motion Detection
Ryan Crownover• EE• Coding Logic• Motion System • Software Design• Website
Tyler Ross•EE•Hardware Design•Motion Detection•Power System Analysis
Team Advisor
Dr. Raymond Winton
Lee Jones• EE• Hardware Design• PCB Design• Power System
Design
Dr. Randy Follett
Class Professor
OutlineOverviewMarket RequirementsTechnical SpecificationFunctional DecompositionWork ScheduleDesign ImplementationCost AnalysisTestingIssuesSummaryQ&A

Senior Design
2 Semester Product Development
Involves the use of technical skills obtained through the Electrical and Computer Engineering Undergraduate Program

Currently, cooler transportation is time consuming, cumbersome, and exhausting, and the source of these difficulties has gone unchanged for years: human involvement.
Problem
The Kooler Kart will reduce the need for human involvement in a cooler transportation process.
• Hands free
• Designed to be user friendly.
Solution

Market RequirementsManufacturability
The Kooler Kart must satisfy the following requirements:
•Hold the weight of a 25qt cooler (~60lbs loaded)
•Travel at a max speed of 6 mph

The Kooler Kart must be simple enough that someone can operate and charge it, regardless of their knowledge of motion technology.
• Battery Charge Display
• Motor Disengage Option
Market RequirementsUsability

Technical Specification
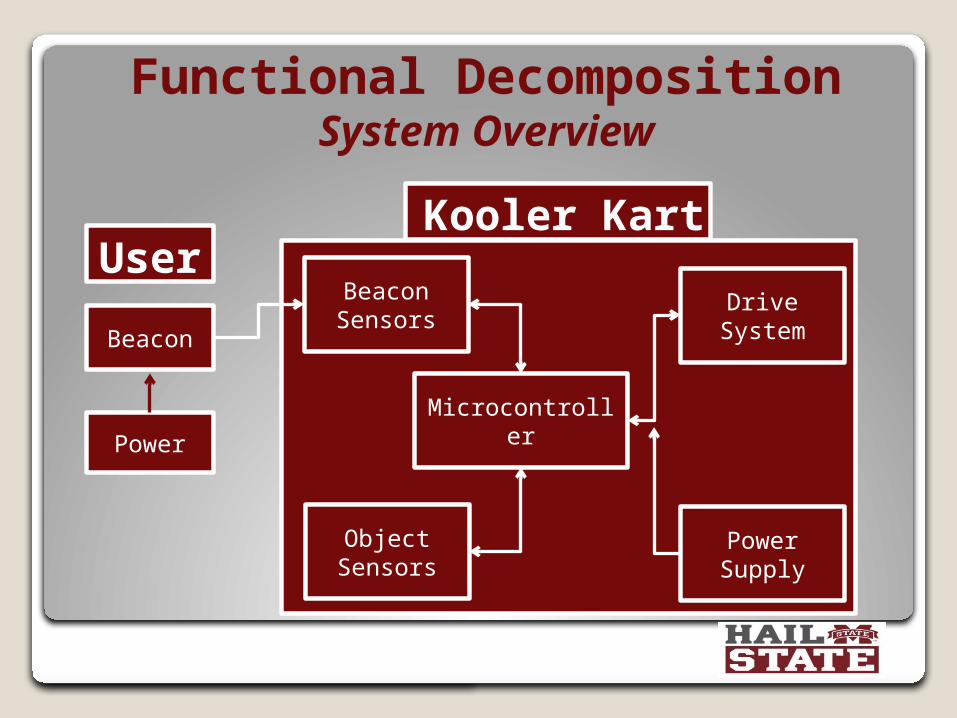
Beacon
Drive System
Microcontroller
Object Sensors
Beacon Sensors
UserKooler Kart
Power
Power Supply
Functional DecompositionSystem Overview

Work ScheduleOriginal Timeline

Work ScheduleActual Timeline
Task Sept. Oct. Nov. Jan. Feb. Mar. Apr.
Project Plan
Hardware
Roles
Drive System / Testing
Beacon / Testing
Object Detection / Testing
Packaging
Full Integration

Design Implementation
• Kooler Kart Design
• Subsystems
• Packaging

Design ImplementationKooler Kart Design
Kooler Kart Object SensorsReceivers
Beacon
Subsystems

SubsystemsBeacon Detection
Uses Ultrasonic Rangefinder and an RF Link simultaneously
•Ultrasonic•Pulses to receivers to determine the angle of
the user from the kart
•RF Link•Pulses to the RF receiver calculating the
distance the user is from the kart
• Array of 6 Ultrasonic Rangefinders
• Fires consecutively detecting object up to 1m away
SubsystemsObject Detection

Beacon angle and distance found • Kooler Kart will move: Forward, Reverse, Port,
and Starboard
Object detected • Kooler Kart will avoid object while searching
for beacon signal
SubsystemsMotion Controls
Packaging
• Main Board PCB
• Kooler Kart Prototype
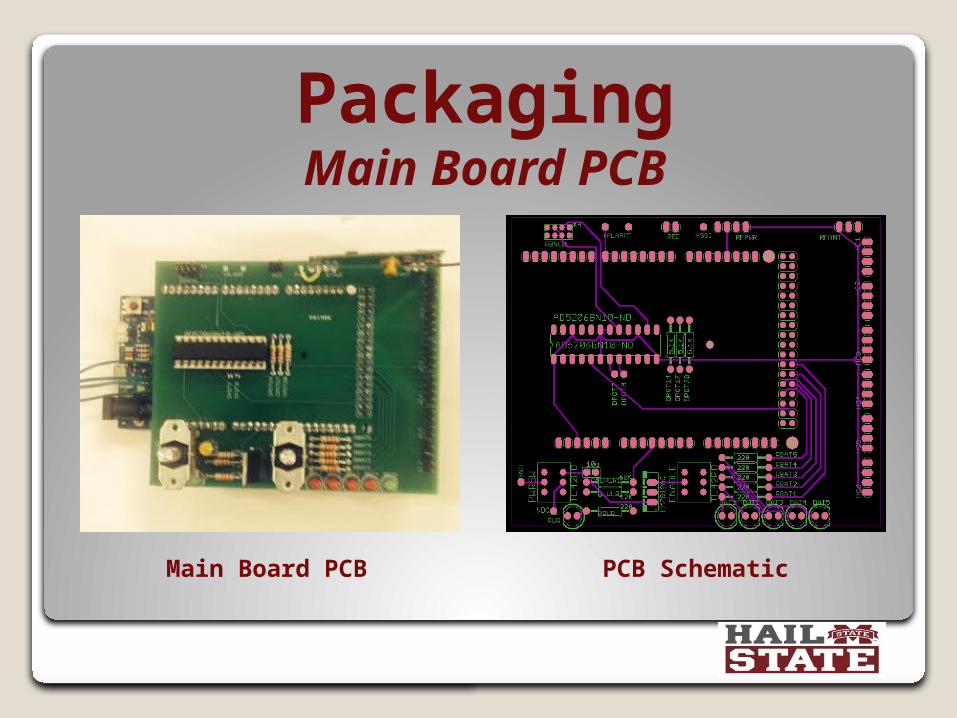
PackagingMain Board PCB
Main Board PCB PCB Schematic

PackagingKooler Kart Prototype

Cost AnalysisParts Lists Number Cost Production
Cost/One
Microprocessor 1 $70 $50
HC-SR04 7 $21 $21
Servos 1 Donation $120
PCB 2 $25 $80
RF (Rx,Tx) 2 $20 $5
40KHz Receiver Circuit 2 $15 $15
Cart Frame 1 Donation $40
Total 16 $151 $331
Testing• Beacon Detection
• Object Detection
• Best/Worst Case Scenario

TestingBeacon Detection
Beacon Signal Receivers
[4]
Max Variance: 5.83⁰Min Variance: 0.67⁰
Field of View: +/- 60⁰

Beacon Sensors
Distance: 2mDistance Expected
Avg % Error
100 cm 1.8%
200 cm 4.9%
300 cm 10%
TestingBeacon Detection

Beacon Sensors Object
ObjectCase – 50 cm
Distance % Error
1 14.8%
2 3.2%
3 5.4%
4 6.2%
5 4.9%
6 11.2 %
TestingObject Detection
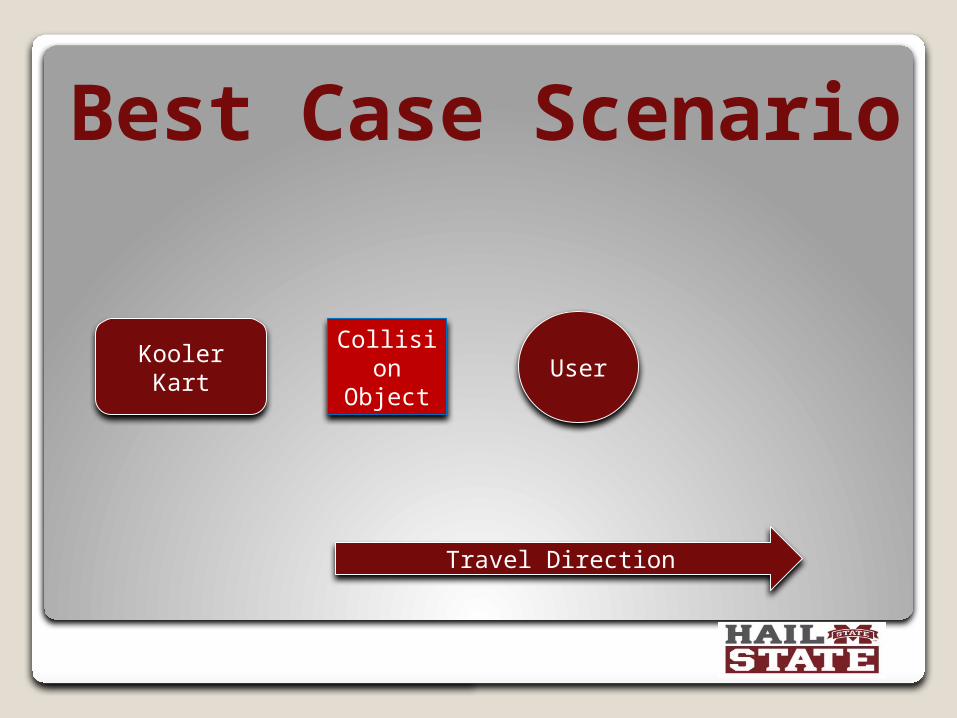
Best Case Scenario
Kooler Kart UserCollision Object
Travel Direction

Best Case Scenario
Kooler Kart
UserCollision Object
Travel Direction

Best Case Scenario
Kooler Kart User
Collision Object
Travel Direction

Worst Case Scenario
Kooler Kart
Travel Direction
UserCollision Object
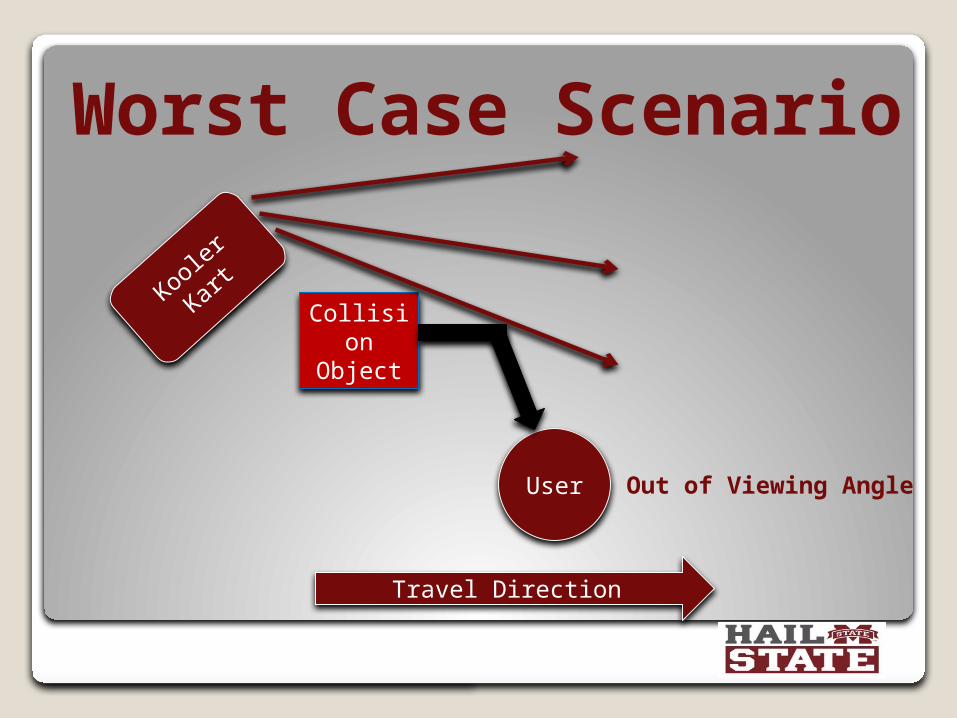
Worst Case Scenario
Kool
er K
art
Travel Direction
User
Collision Object
Out of Viewing Angle

IssuesRoad Blocks
• Receiver Noise
• Beacon Detection Method
• Object Detection Array
IssuesRoad Blocks

SummaryFuture Team Advice
• I: Motivation• Pick a project that will keep your interest
• II: Time Management• Allow yourself time for errors
• III: Research• Always do your research before ordering parts

• PCB Design
• Motion Control Systems
• Ultrasonic and RF communication
SummaryTechnical Skills

• Beacon Detection System
• Teamwork and Communication
SummarySatisfaction

References[1] Eric. Infrared vs. Ultrasonic - What you should know. 2008.
Online: http://societyofrobots.com/member_tutorials/node/71
[2] “Arduino Mega,” in Arduino. 2013 Oct. 2. Available:http://arduino.cc/en/Main/ArduinoBoardMega
[3] “Ultrasonic Module HC-SR04,” in Hobby King. 2013 Oct. 2. Available: http://www.hobbyking.com/hobbyking/store/__31136__ultrasonic_module_hc_sr04_arduino.html
[4] Hashizume, H.; Kaneko, A.; Sugano, Y.; Yatani, K.; Sugimoto, M., "Fast and Accurate Positioning Technique Using Ultrasonic Phase Accordance Method," TENCON 2005 2005 IEEE Region 10 , vol., no., pp.1,6, 21-24 Nov. 2005 doi: 10.1109/TENCON.2005.301009

Questions?
Related Documents











