Joonas Vanninen Antonio Palomino Alarcos

Joonas Vanninen Antonio Palomino Alarcos. One of the objectives of biomedical image analysis The characteristics of the regions are examined later.
Jan 03, 2016
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Joonas VanninenAntonio Palomino Alarcos

One of the objectives of biomedical image analysis
The characteristics of the regions are examined later in detail
Segmentation is the process of dividing an image into different parts by Discontinuity Similarity
Many of the methods can be used more generally in detection of features

If the gray levels of the objects of interest are known, the image can be thresholded to include only them
Doesn’t generally produce uniform regions

Can be useful in noise removal and the analysis of particles
Isolated points can be detected with the following convolution mask
111
181
111
211
121
112
,
112
121
211
,
121
121
121
,
111
222
111
•Can be thresholded
•Straight lines can be detected with masks


An edge: A large change in the gray level The change is in a particular direction,
depending upon the orientation of the edge Can be measured for example with derivatives
or gradients:
),arg(,),(22
y
g
x
g
y
g
x
gyxg
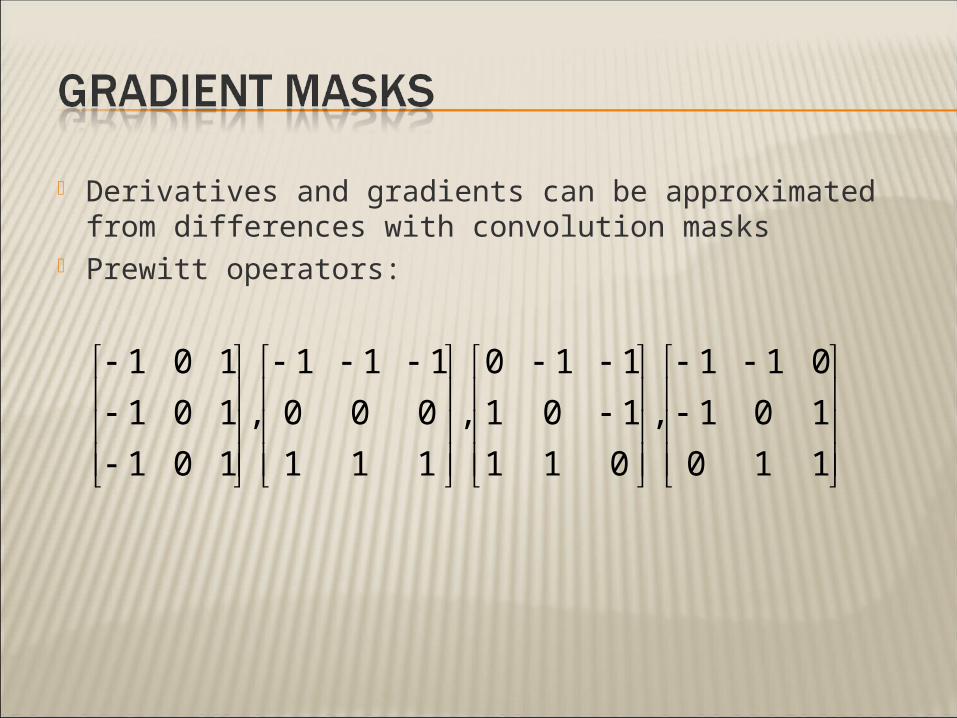
Derivatives and gradients can be approximated from differences with convolution masks
Prewitt operators:
110
101
011
,
011
101
110
,
111
000
111
,
101
101
101
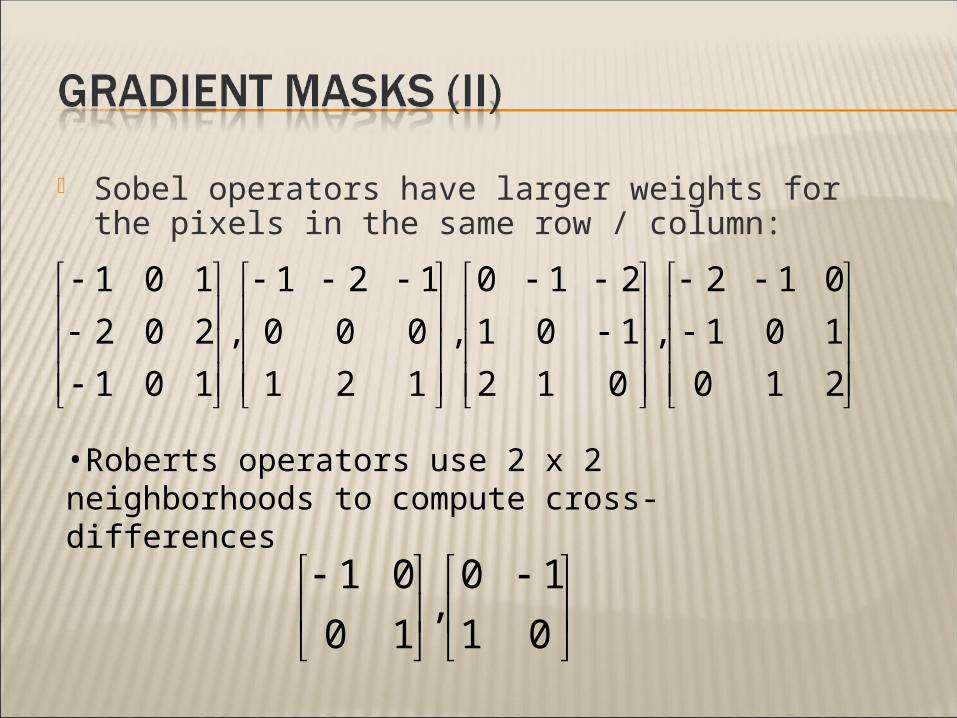
Sobel operators have larger weights for the pixels in the same row / column:
210
101
012
,
012
101
210
,
121
000
121
,
101
202
101
01
10,
10
01
•Roberts operators use 2 x 2 neighborhoods to compute cross-differences

With two masks we can get a vector value for the gradient:
),(),(),( yxjGyxGyxG yxf

A second-order difference operator
121
242
121
,
212
141
212
,
111
181
111
,
010
141
010
),(),(),(
2
2
2
22
y
yxg
x
yxgyxg
•Omnidirectional: sensitive to edges in all directions but can’t detect the direction of the edge
•Sensitive to noise since there is no averaging
•Positive and negative values for each edge
•Zero crossings in between, can be used to find the local maximas of the first-order gradients

The noise in an image can be reduced by first convolving it with a Gaussian:
2
2
2
22
22 );(,);,( ryx
erGeyxG
),(*));,((
)),(*);,((2
2
yxgyxG
yxgyxG
•The order of the operators can be changed:

The result is called the Laplacian of Gaussian operator, LoG
Often referred as the Mexican hat function
Can be approximated by the difference between two gaussians, DoG operator
2
22
24
2222 );,(
yx
eyx
yxG

Uses zero-crossings of the image convolved with the LoG-operator to represent edges
Problems: If the edges are not well separated, zero
crossings may also represent local minimas (false zero crossings)
The edge localization may be poor

Different structures are visible with different scales, parameter σ of the Gaussian
Ideally an edge would be seen with as many scales as possible
Stability map measures the persistence of boundaries over a range of filter scales

Ideal detector for step-type edges corrupted with additive white noise by three criterias:
Detection: no false or missing edges Localization: detected edges are spatially
near the real ones A single output for a single edge
The image is convolved with a Gaussian The gradient is estimated for each pixel
• The direction of the gradient is the normal of the edge
• The amplitude of the gradient is the strength of the edge

Non-maximal suppression: the values of gradients that are not local maximas are set to zero
The gradients are hysteresis thresholded: a pixel is considered to be an edge pixel if• It has a gradient value larger than the higher
threshold, • It has a gradient value larger than the lower
threshold and it is spatially connected to another edge pixel
The zero-crossings of the second derivative in the direction of the normal can also be used• This can be used for sub-pixel accuracy

Highpass filters in the Fourier-domain can be used to find edges
High-frequency noise → use a bandpass filter
LoG –filter: a high-frequency emphasising Laplacian and a Gaussian lowpass filter
Use of frequency domain may be computationally advantageous if the LoG is specified with a large array (large σ)

Edges are usually not linked The similarity of edge pixels can be
measured by: The strenght of the gradient The direction of the gradient
Most similar pixels should be used to link edges to each other

The original image

Edge detection with Prewitt mask, T=10

Edge detection with Prewitt mask, T=15

Edge detection with Prewitt mask, T=30

Edge detection with Sobel mask, T=15

Edge detection with Roberts mask, T=20

Edge detection with Marr-Hildreth -method (LoG), T=1.2

Edge detection with Canny method, Tl=0.05, Th=0.2


Dividing the image into regions that could correspond to ROIs is an important prerequisite apply the image analysis techniques
Computer analysis of images usually starts with segmentation Reduces pixel data to region-based information
about the objects present in the image

Thresholding techniques Assumption: all pixels whose values lie within
a certain range belong to the same class Threshold may be determined based upon
the histogram of the image
Boundary-based methods Assumption: pixel values change rapidly at
the boundaries between regions Intensity discontinuities lying at the
boundaries between objects and backgrounds must be detected

Region-based methods Assumption: neighboring pixels within a
region have similar values May be divided into two groups
Region Splitting and Merging Region Growing
Hybrid techniques Combine boundary and region criteria

Noise modify the gray levels to distributions represented by Gaussian PDFs
Probability of erroneus classification is
Differentiating whith respect to T, equating the result to zero and taking some simplifications (σ1=σ2=σ)
22
22
21
21
2
)(
2
22
)(
1
12211
22)()()(
xx
eP
eP
xpPxpPxp
T
T
e dxxpPdxxpPTP )()()( 2211
2
1
21
221 ln
2 P
PT

This method partitions R (entire space of the given image) into n subregions such that: is a connected region for i=1,2,…,n
Results are highly dependent upon the procedure used to select the seed pixels and the inclusion criteria used
RRini 1iR
jijiRR ji ,,TRUERF i )(
jijiFALSERRF ji ,,)(
Initially, we will divide the given image arbitrarily into a set of disjoint quadrants
If F(Ri)=FALSE for any quadrant, subdivide that quadrant into subquadrants
Iterate the procedure until no further changes are made
Splitting procedure could result in adjacent regions that are similar, a merging step would be required, as follows: F(RiURk)=TRUE
Iterate until no further merging is possible

A neighboring pixel f(m,n) is appended to the region if:
T Ξ ‘Additive Tolerance Level’
Problem: The size and shape of the region depend on the seed pixel selected
Tseednmf ),(


Running-mean algorithm The new pixel is compared with the mean gray
level (running mean) of the region being grown
”Current center pixel” method After a pixel C is appended to the region, its 4
(or 8) connected neighbours would be checked for inclusion in the region as follows:
c
c
c
RnmcR
R
nmfN
Tnmf
),(
),(1
),(
TCN i


A relative difference, based upon a ”multiplicative tolerance level” (τ) could be employed:
c
c
c
c
R
R
R
R
nmf
nmf
or
nmf
),(
),(2
),( •f(m,n)Ξgray level of the pixel being checked
•μRcΞ original seed pixel value current center pixel value running-mean gray level

Last methods presents difficulties in the selection of the range of the tolerance value Possible solution: make use of some of the
characteristics of the HVS
New parameter ”Just-noticeable difference” (JND) is used:
JND=L.CT
L Ξ background luminance CT Ξ threshold contrast

Determination of the JND as a function of background gray level is needed to apply this method
It is possible to determine this relationship based upon psychophysical esperiments

1. It starts with a 4-connected neighbor-pixel grouping. The condition is defined as:
2. Removal of small regions is performed
3. Merging of connected regions is performed if any of two neighboring regions meet the JND condition
4. The procedure is iterated until no nieghboring region satisfies the JND condition
)(,)(min 2121 pJNDpJNDpp

Region grown using an additive tolerance T=10

Region grown using running mean tolerance T=10

Region grown using multiplicative mean tolerance T=0.1


Hough domain: straight lines are characterized by the pair of parameters (m,c)
m is the slope c is the position
Disadvantage: m and c have unbounded ranges
Parametric representation
θ limited to [0,π] (or to [0,2π]) ρ limited by the size of the image Limits of (ρ,θ) affected by the choice of the origin
cmxy
sincos yx

If normal parameters of the line are (ρ0,θ0)
Derived properties: Point in (x,y) space corresponds to a sinusoidal curve in the
(ρ,θ) space Point in the (ρ,θ) space correspond to a straigh line in the
(x,y) space Points in the same straigh line in the (x,y) space
corresponds to curves through a common point in the (ρ,θ) space
Points on the same curve in the parameter space corrspond to lines through a common point in the (x,y) space
1,...,2,1,0,sin)(cos)( 000 Nnnynx

1. Discretize the (ρ,θ) space into accumulator cells by quantizing ρ and θ
2. Accumulator cells are increased by one (new curve ’ρ=x(n)cosθ+y(n)cosθ’ found) for each pixel with a value of 1
3. Cordinates of points of intersection of the curves in the parameter space provide the parameters of the line

Image: Wikipedia

Any circle in the (x,y) space is represented by a single point in the 3D (a,b,c) parameter space
Points along the perimeter of the circle describe a circular cone in the (a,b,c) space
Algorithm for detection of straight lines may be extended for the detection of circles
222 )()( cbyax

The methods here are quite general, their applications are not limited to just segmentation
The purpose of any image processing method is to obtain a result that can be presented to humans or used in a further analysis The result should be consistent with a human
observer’s assessment A priori information about the shapes and
features in an image is important in segmentation
Related Documents











