D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y First Integrated Magnetic and Kinetic Control for AT Scenarios on DIII-D D. Moreau CEA-DSM-IRFM, Cadarache, 13108 St-Paul-lez-Durance Cedex, France E. Schuster, J. Barton, D. Boyer, W. Shi, W. Wehner Lehigh University, Bethlehem, PA 18015, USA M. Walker, J. Ferron, D. Humphreys, A. Hyatt, B. Johnson, B. Penaflor, F. Turco, and many DIII-D collaborators General Atomics, San Diego, CA 92186, USA 1 ITPA-IOS Joint Experiment # 6.1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
First Integrated Magnetic and Kinetic Control
for AT Scenarios on DIII-D
D. Moreau CEA-DSM-IRFM, Cadarache, 13108 St-Paul-lez-Durance Cedex, France
E. Schuster, J. Barton, D. Boyer, W. Shi, W. Wehner
Lehigh University, Bethlehem, PA 18015, USA
M. Walker, J. Ferron, D. Humphreys, A. Hyatt, B. Johnson, B. Penaflor, F. Turco, and many DIII-D collaborators
General Atomics, San Diego, CA 92186, USA
1
ITPA-IOS Joint Experiment # 6.1

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
Outline
• ARTAEMIS model structure and integrated control
• Control of the internal poloidal flux profile, ψ(x)
• Integrated control of ψ(x) and βN
• Lehigh University controller and ι(x) control
• Proposal for 2012 and beyond
2
D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
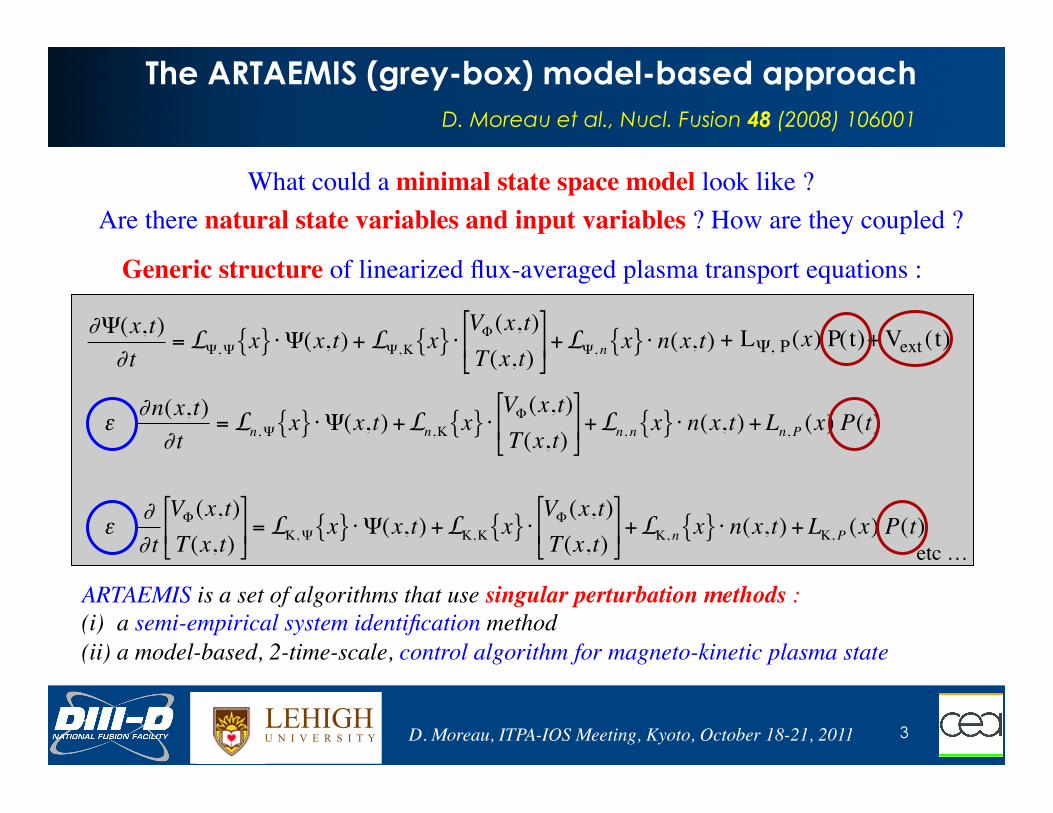
The ARTAEMIS (grey-box) model-based approach
D. Moreau et al., Nucl. Fusion 48 (2008) 106001
3
ARTAEMIS is a set of algorithms that use singular perturbation methods : (i) a semi-empirical system identification method (ii) a model-based, 2-time-scale, control algorithm for magneto-kinetic plasma state
What could a minimal state space model look like ? Are there natural state variables and input variables ? How are they coupled ?
!
"#(x, t)" t
= L#,# x{ } $ #(x, t) + L#,% x{ } $V&(x,t)T(x,t)'
( )
*
+ , + L#, n x{ } $ n(x, t)
!
+ L", P(x) P(t)+Vext (t)
!
"#n(x, t)# t
= Ln,$ x{ } % $(x, t) + Ln,& x{ } %V'(x,t)T(x,t)(
) *
+
, - + Ln, n x{ } % n(x, t) +Ln,P (x) P(t)
!
"## t
V$(x,t)T(x,t)%
& '
(
) * = L+,, x{ } - ,(x, t) + L+,+ x{ } -
V$(x,t)T(x,t)%
& '
(
) * + L+, n x{ } - n(x, t) +L+,P (x) P(t)
etc …
Generic structure of linearized flux-averaged plasma transport equations :

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
The ARTAEMIS controller design and parameters for combined ψ(x) and βN control
4
• Singular perturbation analysis è Near-optimal control = Optimal control up to O(ε2)"
0
!
" X+(t)Q X(t) dt + 0
!
" u+(t) R u(t) dtThe dynamics minimizes"
x1
x2! ! x( )"! target x( )#$ %&
2dx
using a given set of SVD modes (controller order)"
minimizes"
• The slow proportional + integral feedback tracks a steady state that"
• The fast proportional feedback loop maintains the kinetic variables, e. g. βN, on a trajectory which is consistent with the slow magnetic state evolution, ψ(x, t)."
given weight matrices, Q and R, with X = controlled variables and u = actuators
x1
x2! ! x( )"! target x( )#$ %&
2dx + ! "N ""N ,t arget
#$ %&2
to control simultaneously ψ(x) and βN"
minimizes"

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
Control of the internal poloidal flux profile : ψ(x) = Ψ(x) – Ψboundary
5
x1
x2! ! x( )"! target x( )#$ %&
2dxThe controller minimizes"
with actuator constraints and optimal gain matrices that depend on controller parameters : • 4 actuators = NB-Co, NB-Bal, ECCD (5 gyros), Vsurf (NB 210R unavailable on 09/13) • R-matrix : actuator weight fixed by considering actuator headroom (MW & Volts ?) • Q-matrix : same weight on 9 different controlled radii (x = 0.1, …, 0.9) • Controller order = 2 (proportional + integral control) • Weight on integral control in the Q-matrix = 4, 10, 25, respectively, on the 3 examples below :
2.5 3 3.5 4 4.5 5 5.5 60
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Time
Qua
drat
ic c
ost f
unct
ion
#146410 : Cost function (EcoilGp= 5 IntWeight=4)
Psi profile control
33L max15L max
EC minn = 1 mode
#146410 : IntWeight = 4
2.5 3 3.5 4 4.5 5 5.50
0.005
0.01
0.015
0.02
0.025#146407 : Cost function (EcoilGp= 15 IntWeight=10)
Time
Qua
drat
ic c
ost f
unct
ion
Psi profile control
33L max15L max
n = 1 mode
#146407 : IntWeight = 10
2 2.5 3 3.5 4 4.5 5 5.5 60
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01
Time
Qua
drat
ic co
st fu
nctio
n
#146416 : Cost function (EcoilGp= 7.5 IntWeight=25)
NBCO min
Psi profile control
n = 2 mode
n = 2 mode15L max
#146416 : IntWeight = 25

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
Control of the poloidal flux profile (x = 0.1, 0.2, … 0.9)
6
2.5 3 3.5 4 4.5 5 5.5 60
0.5
1
1.5
Time
Psi (
x =
0.1
0.9
)
#146410 : Psi1 Psi9 (EcoilGp= 5 IntWeight=4)
Psi profile control
n = 1 modeEC min
33L max15L max
#146410 : IntWeight = 4
2.5 3 3.5 4 4.5 5 5.50
0.5
1
1.5#146407 : Psi1 Psi9
Time
Psi (
x =
0.1
0.9
)
Psi profile control
33L max15L max
n = 1 mode
#146407 : IntWeight = 10
2 2.5 3 3.5 4 4.5 5 5.5 60
0.5
1
1.5
Time
Psi (
x =
0.1
0.9
)
#146416 Psi1 Psi9 (EcoilGp= 7.5 IntWeight=25)
n = 2 mode
Psi profile control
NBCO minn = 2 mode
15L max
#146416 : IntWeight = 25
Control : 3.5 s - 6 s Control : 3.5 s - 5 s Control : 2.5 s - 6 s
x = 0.1
x = 0.2
x = 0.3
x = 0.4
x = 0.5
x = 0.6
x = 0.7
x = 0.8
x = 0.9

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
Control of the poloidal flux profile ψ(x) @ t = 2.5 s, 4 s, 6 s
7
#146410 : IntWeight = 4 #146416 : IntWeight = 25
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Normalized radius
Polo
idal
flux
(Wb)
#146410 : Psi(x) @ t=2.5 s, 4 s, 6 s
t = 2.5 st = 4 st = 6 sPsi(x) targets
Slow
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Normalized radius
Polo
idal
flux
(Wb)
#146416 : Psi(x) @ t= 2.5 s, 4 s and 6 s
t = 2.5 st= 4 s (overshoot)t = 6 sPsi(x) targets
Fast (overshoot)

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
with actuator constraints and optimal gain matrices that depend on controller parameters : • 5 actuators = NB-Co, NB-Bal, NB-Cnt, ECCD (6 gyros), Vsurf • R-matrix : actuator weights fixed by considering actuator headroom (MW & Volts ?) • Q-matrix : same weight on 9 controlled radii for ψ(x), x=0.1, 0.2, … 0.9 • Weight on βN control : λ = 0.3 • Controller order = 2 or 3 (proportional + integral control) • Weight on integral control in the Q-matrix = 25 and 10, respectively, in the 2 examples below :
2.5 3 3.5 40
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Time
Qua
drat
ic c
ost f
unct
ion
#146453 Cost function (betaN weight = 0.31, control order = 3, IntWeight = 10)
Psi partbetaN partTotal
n = 1mode
EC min21R min
Actuator saturation
Simultaneous control of the ψ(x) profile and βN 5 actuators : NB-co, NB-bal, NB-cnt, ECCD, Vsurf
8
x1
x2! ! x( )"! target x( )#$ %&
2dx +! "N ""N ,target
#$ %&2The controller minimizes"
#146420 Control order = 2 IntWeight = 25
#146453 Control order = 3 IntWeight = 10
2.5 3 3.5 40
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1#146420 : Cost function (betaN weight = 0.31, control order = 2, IntWeight = 25)
Time
Qua
drat
ic c
ost f
unct
ion
Psi partbetaN part
n = 1 moden = 2 mode
MHD

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.50
0.5
1
1.5#146455 : Psi1 Psi9 (betaN weight = 0.31, control order = 3, IntWeight = 10)
TimePs
i (x
= 0.
1 0
.9)
MaximumPsi(x) overshoot
Psi profile + betaN control with 5 actuators
n = 2 mode
x = 0.1 x = 0.2 x = 0.3
x = 0.4
x = 0.5
x = 0.6
x = 0.7
x = 0.8
x = 0.9
radii
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Normalized radius
Psi(x
)
#146455 : Psi(x) targets and achieved profiles
t = 0.5 st = 4.25 s (overshoot)t = 6 sPsi targets (#140076 @ 3.4 s)
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.51.4
1.5
1.6
1.7
1.8
1.9
2
2.1
2.2#146455 : betaN
Time
beta
N
betaN targetbetaN
Psi profile + betaN control
n = 2 mode
Simultaneous control of the ψ(x) profile and βN
(shot # 146455 : control starting @ t = 1.5 s)
9
βN control
ψ-profile control
ψ(x= 0.1, 0.2, …0.9) & targets (lines)
Time
D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
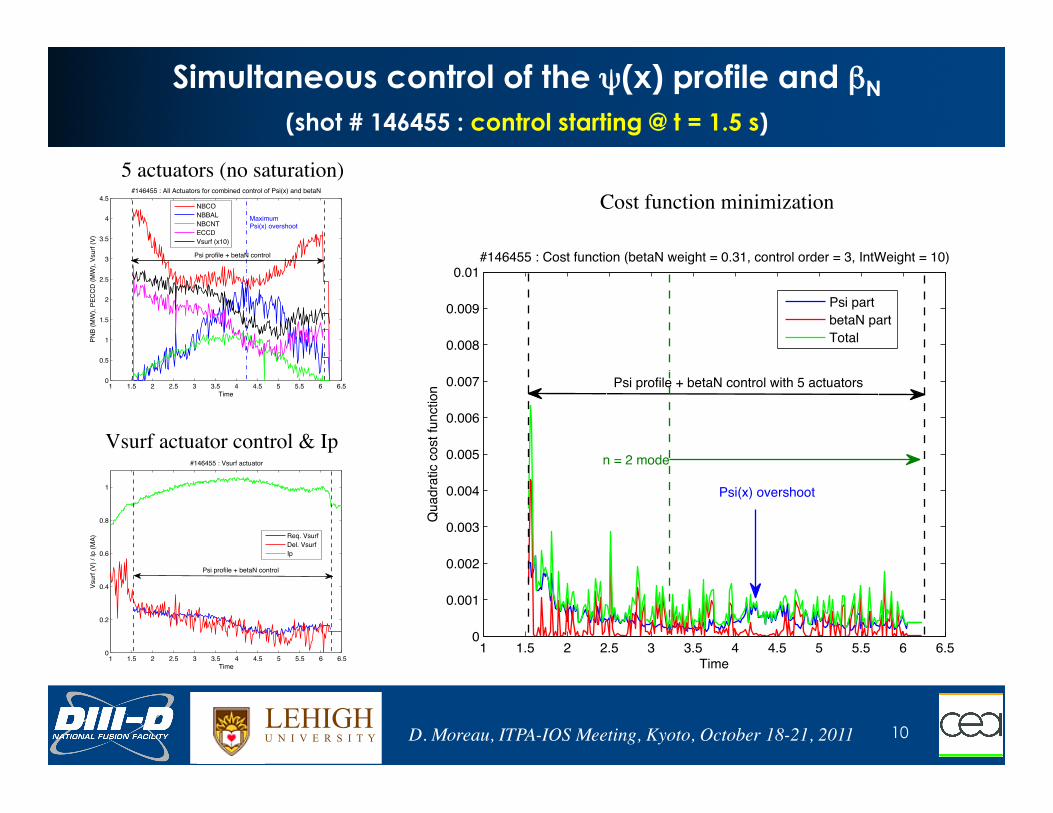
Simultaneous control of the ψ(x) profile and βN
(shot # 146455 : control starting @ t = 1.5 s)
10
5 actuators (no saturation)
Vsurf actuator control & Ip
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Time
PNB
(MW
), PE
CC
D (M
W),
Vsur
f (V)
#146455 : All Actuators for combined control of Psi(x) and betaN
NBCONBBALNBCNTECCDVsurf (x10)
Psi profile + betaN control
MaximumPsi(x) overshoot
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.50
0.2
0.4
0.6
0.8
1
Time
Vsur
f (V)
/ Ip
(MA)
#146455 : Vsurf actuator
Req. VsurfDel. VsurfIp
Psi profile + betaN control
Cost function minimization
1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.50
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01#146455 : Cost function (betaN weight = 0.31, control order = 3, IntWeight = 10)
Time
Qua
drat
ic c
ost f
unct
ion
Psi partbetaN partTotal
Psi(x) overshoot
n = 2 mode
Psi profile + betaN control with 5 actuators

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Normalized radius
Psi (
Wb)
#146463 : Psi(x) targets and achieved profiles
t = 0.5 st = 2.4 s (overshoot)t = 5 sPsi targets (#136212 @ 2 s)
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
0.5
1
1.5
2
2.5
3
Time
beta
N, I
p (M
A), n
=1 m
ode,
n=2
mod
e#146463 : betaN (control weight = 0.31, control order = 3, IntWeight = 10)
betaN targetbetaNIpn=1 mode (x 0.04)n=2 mode (x 0.04)
Psi profile + betaN control (5 actuators)
MHD
Ip
Simultaneous control of the ψ(x) profile and βN
shot # 146463 : control starting @ t = 1 s (ramp-up)
11
βN control
ψ-profile control
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
0.5
1
1.5#146463 : Psi1 Psi9 (betaN weight = 0.31, control order = 3, IntWeight = 10)
TimePs
i (x
= 0.
1 0
.9)
n=1 / n=2 modes
Psi profile + betaN control (5 actuators)
x = 0.1 x = 0.2 x = 0.3 x = 0.4
x = 0.5 x = 0.6 x = 0.7
x = 0.8
x = 0.9
radii
ψ(x= 0.1, 0.2, …0.9) & targets (lines)
Time

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
Simultaneous control of the ψ(x) profile and βN
shot # 146463 : control starting @ t = 1 s (ramp-up)
12
5 actuators (MHD è NB-Bal saturation)
Vsurf actuator control & Ip
Cost function minimization
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
1
2
3
4
5
6#146463 : All actuators for combined control of Psi(x) and betaN
Time
PNB
(MW
), PE
CC
D (M
W),
Vsur
f (V)
NBCONBBALNBCNTECCDVsurf (x10)
Psi profile + betaN control
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
0.2
0.4
0.6
0.8
1
1.2
#146463 : Vsurf actuator
Time
Vsur
f (V)
, Ip
(MA)
Req. VsurfDel. VsurfIp
Psi profile + betaN control (5 actuators)
Vsurf controlFeedfwd : 0.4 VProp gain : 7.5
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
Time
Qua
drat
ic c
ost f
unct
ion
& n=
1 m
ode
#146463 : Cost function (betaN weight = 0.31, control order = 3, IntWeight = 10)
Psi partbetaN partn=1 mode (inverted)
Psi profile + betaN control (5 actuators)
Psi(x) overshoot
D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y 13
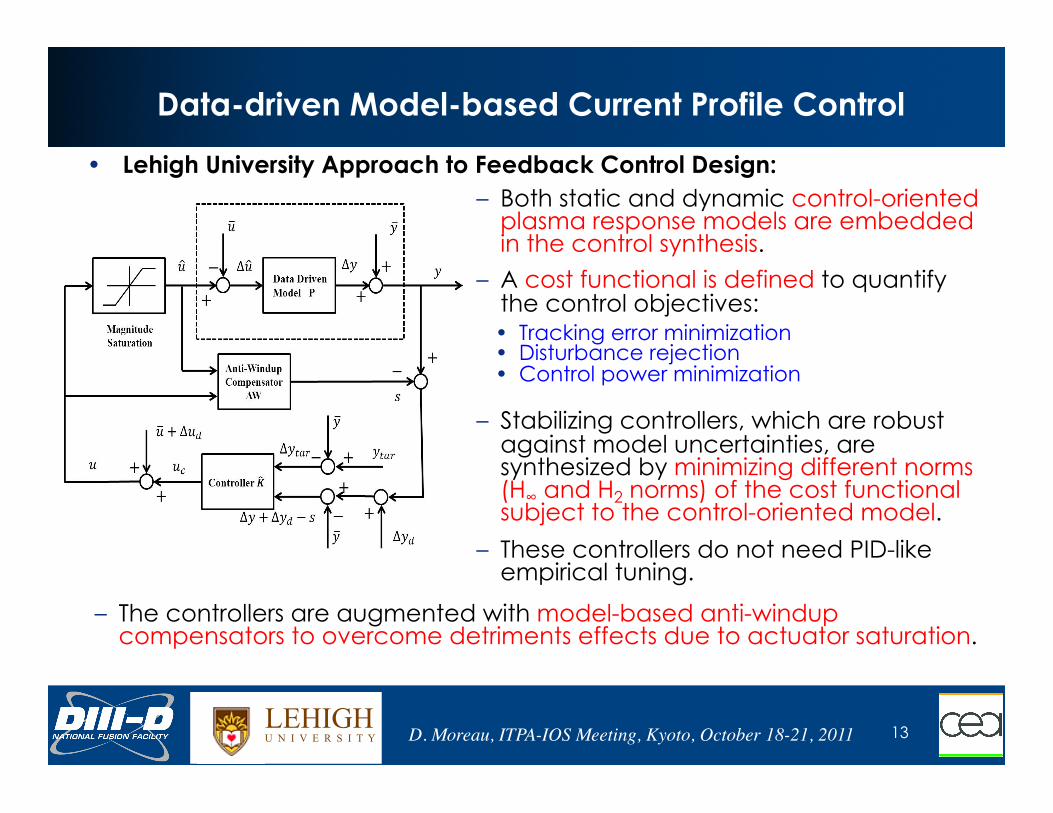
• Lehigh University Approach to Feedback Control Design:
Data-driven Model-based Current Profile Control
– Both static and dynamic control-oriented plasma response models are embedded in the control synthesis.
– A cost functional is defined to quantify the control objectives: • Tracking error minimization • Disturbance rejection • Control power minimization
– Stabilizing controllers, which are robust against model uncertainties, are synthesized by minimizing different norms (H∞ and H2 norms) of the cost functional subject to the control-oriented model.
– These controllers do not need PID-like empirical tuning.
– The controllers are augmented with model-based anti-windup
compensators to overcome detriments effects due to actuator saturation.

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y 14
Data-driven Model-based Control of ι(x) =1/q(x)
– In the DIII-D PCS different magnetic profiles (ψ(ρ), ι(ρ), q(ρ) or θ(ρ)=∂ψ/∂ρ) can now be obtained in real time from a complete equilibrium reconstruction using data from the MSE diagnostic.
– Figure on the left illustrates both simulated and experimental evolutions for the rotational transform ι(ρ) at normalized radii ρ=0.2, 0.4, 0.5, 0.6, 0.8 for shot146419.
– Tracking of the ι(ρ) target profile was achieved by regulating: • Total plasma current • Co-injection and balanced beam powers
(counter-injection beam not available) • Total ECH/ECCD power
– Artificial input disturbances were introduced at t=3.5 sec.

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y 15
Data-driven Model-based Control of ι(x) =1/q(x)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Normalized
Time:2.538 Sec.
TargetMeasuredControl point
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Normalized
Time:3.498 Sec.
TargetMeasuredControl point
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Normalized
Time:4.018 Sec.
TargetMeasuredControl point
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Normalized
Time:5.998 Sec.
TargetMeasuredControl point
Tight regulation is achieved before t=3.5 sec.
A significant tracking error in the inner part of the profile is noted after the artificial disturbance is introduced at t=3.5 sec.
The controller reacts by decreasing the tracking error at the inner point and slightly increasing the error at the outer points with the ultimate goal of improving the overall profile tracking.
Ip regulation was poor due to setup problem.
More control authority is expected with stronger Ip regulation and counter injection beam.

D. Moreau, ITPA-IOS Meeting, Kyoto, October 18-21, 2011 LEHIGH U N I V E R S I T Y
• Control of ψ(x), ι(x) = 1/q(x) and combined control of ψ(x) and βN have been achieved for the first time on DIII-D using either 4 or 5 actuators :
Co-NBI, (Cnt-NBI), Bal-NBI, ECCD, Vsurf
• New PCS with profile control algorithm was qualified and worked perfectly
• ψ(x) and βN control was switched on during current ramp-up.
• Combined feedback control of ψ(x) and βN was successful up to [1s-6s]
Proposal for ITPA-IOS 2012 :
Integrated magnetic and kinetic plasma control
• More experiments on DIII-D with different target current profiles and βN.
• Add control of the rotation and/or Ti profiles (real-time CER)
• Start profile control experiments on other devices (Tore Supra, TCV …?)
Summary and proposal for 2012 …
16
Related Documents











