Inżynieria Ruchu Morskiego wykład 01 Inżynieria Ruchu Morskiego wykład 01 Dr inż. Maciej Gucma Pok. 343 Tel. 91 4809 495 www.uais.eu //wyklady tu// [email protected]

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Inżynieria Ruchu Morskiego wykład 01
Inżynieria Ruchu Morskiego wykład 01
Dr in ż. Maciej GucmaPok. 343
Tel. 91 4809 495 www.uais.eu //wykłady tu//[email protected]
Zaliczenie Wykładu / ĆwiczeńZaliczenie Wykładu / Ćwiczeń
� Wykład – zaliczenie pisemne� Ćwiczenia - Zadanie – projekt do
wykonania na zaliczenieObejmuje projektowanie i optymalizację Obejmuje projektowanie i optymalizację
terminali i innych obiektów IRM
Czym jest (a czym nie) IRM?Czym jest (a czym nie) IRM?
Inżynieria ruchu morskiego zajmuje się jakościowym i ilo ściowym
opisem procesów ruchu statków na akwenach ograniczonych akwenach ograniczonych
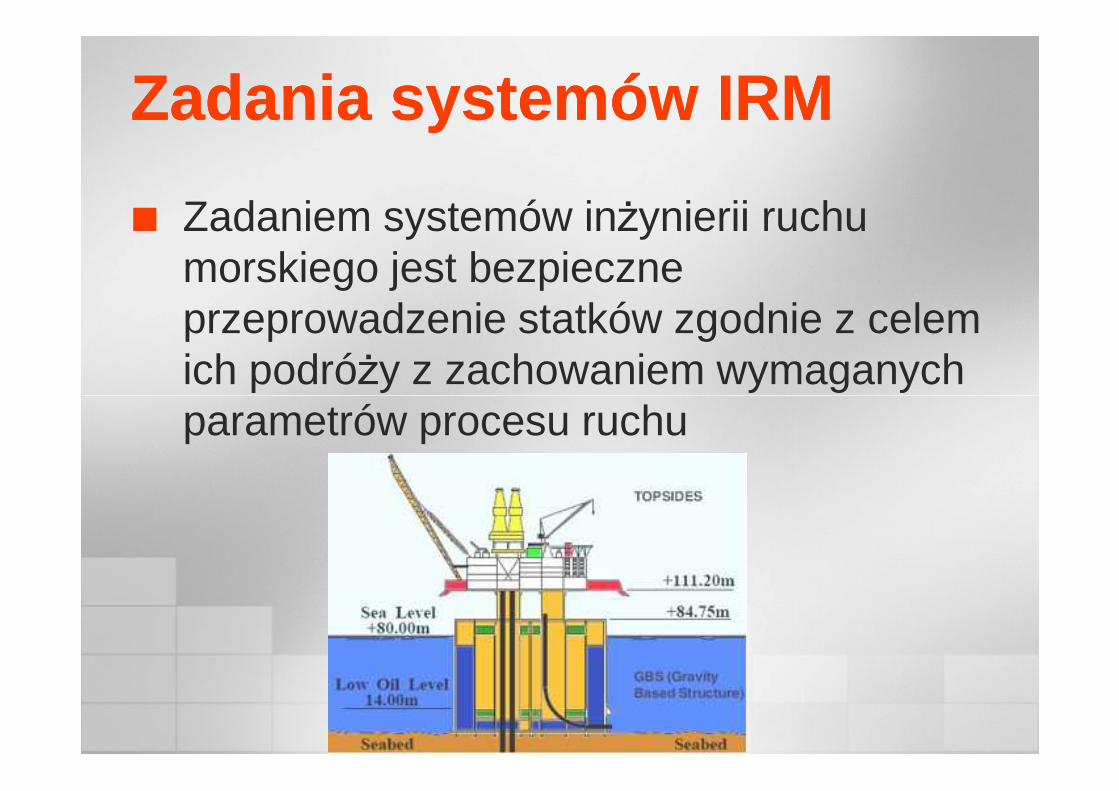
Zadania systemów IRMZadania systemów IRM
� Zadaniem systemów inżynierii ruchu morskiego jest bezpieczne przeprowadzenie statków zgodnie z celem ich podróży z zachowaniem wymaganych parametrów procesu ruchu
W szczególno ści…W szczególno ści…� Określenie wzajemnych zależności między
parametrami statku i akwenu, rodzajem wykonywanego manewru, warunkami hydrometeorologicznymi oraz nawigacyjnymi.

� Optymalizacja parametrów dróg wodnych i budowli hydrotechnicznych dla zadanego typu statku eksploatowanego w określonych warunkach żeglugi.
W szczególno ści…W szczególno ści…
� Optymalizacja parametrów statku dla określonego typu akwenu i panujących tam warunków żeglugi.

PrzykładPrzykład

� Ocena bezpieczeństwa systemów inżynierii ruchu morskiego, miary bezpieczeństwa.� Określenie bezpiecznych warunków
żeglugi w zadanych systemach inżynierii
W szczególno ści…W szczególno ści…
żeglugi w zadanych systemach inżynierii ruchu morskiego.

� Wybór najkorzystniejszego manewru danego typu statku na badanym akwenie w panujących tam warunkach żeglugi.
W szczególno ści…W szczególno ści…
� Określenie przepustowości dróg wodnych i parametrów ruchu w zadanych systemach inżynierii ruchu morskiego.
W szczególno ści…W szczególno ści…
� Określenie przepustowości dróg wodnych i parametrów ruchu w zadanych systemach inżynierii ruchu morskiego.� Optymalizacja parametrów systemów
W szczególno ści…W szczególno ści…
� Optymalizacja parametrów systemów regulacji ruchu dla danej drogi wodnej i panujących tam warunkach żeglugi.

PrzykładPrzykład
I ) Ustalenie wzajemnych relacji statku, akwenu, panuj ących warunków nawigacyjnych i hydrometeorologicznych
I ) Ustalenie wzajemnych relacji statku, akwenu, panuj ących warunków nawigacyjnych i hydrometeorologicznych
1) Ocena bezpieczeństwa nawigacji w systemach inżynierii ruchu morskiego:
� budowa systemu miar oceny bezpieczeństwa nawigacji na akwenach ograniczonych stosowanych do wyboru wariantu rozwiązań systemów inżynierii ruchu morskiego. morskiego.

Systemy miar bezpiecze ństwa nawigacji Systemy miar bezpiecze ństwa nawigacji
Zależą one od typów drogi wodnej i wykonywania na niej manewrów [4,9]. Do podstawowych miar bezpieczeństwa nawigacji na akwenach ograniczonych należą:
� ryzyko nawigacyjne,� szerokość pasa ruchu liczona na określonym poziomie istotności,� energia kinetyczna pierwszego kontaktu statku z budowlą hydrotechniczną,� energia kinetyczna pierwszego kontaktu statku z budowlą hydrotechniczną,� prędkość strumieni zaśrubowych przy dnie i na ściankach budowli
hydrotechnicznych,� rozkład ilości awarii na badanym odcinku drogi wodnej,� czas wykonywanego manewru,

I ) Ustalenie wzajemnych relacji statku, akwenu, panuj ących warunków nawigacyjnych i hydrometeorologicznych
I ) Ustalenie wzajemnych relacji statku, akwenu, panuj ących warunków nawigacyjnych i hydrometeorologicznych
� poszukiwanie uniwersalnych i ekonomicznych metod szacowania bezpieczeństwa nawigacji na akwenach ograniczonych,
� szacowanie ryzyka* nawigacyjnego w systemach inżynierii ruchu morskiego � określenie bezpiecznych warunków żeglugi w systemach inżynierii ruchu
morskiego,� budowa modeli kryteriów bezpieczeństwa nawigacji.
* Modele ryzyka nawigacyjnego są zależne od typu akwenu i wykonywanego tam manewru
PrzykładPrzykład

I ) Ustalenie wzajemnych relacji statku, akwenu, panuj ących warunków nawigacyjnych i hydrometeorologicznych
I ) Ustalenie wzajemnych relacji statku, akwenu, panuj ących warunków nawigacyjnych i hydrometeorologicznych
2) Optymalizacja parametrów dróg wodnych i budowli hydrotechnicznych przy ograniczeniach określonych przez warunki manewrowe statku:
� określenie modelu kryteriów i warunków optymalizacji,� opracowanie szeregu szczegółowych metod optymalizacji parametrów dróg
wodnych i budowli hydrotechnicznych opartych o wyniki badań symulacyjnych. Metody te dotyczą różnych elementów dróg wodnych i związanych z nimi manewrów:związanych z nimi manewrów:� toru wodnego,� obrotnicy,� terminalu promowego,� basenu portowego,� wejścia do portu,
� opracowanie uniwersalnej symulacyjnej metody optymalizacji dla wszystkich elementów dróg wodnych.

PrzykładPrzykład

I ) Ustalenie wzajemnych relacji statku, akwenu, panuj ących warunków nawigacyjnych i hydrometeorologicznych
I ) Ustalenie wzajemnych relacji statku, akwenu, panuj ących warunków nawigacyjnych i hydrometeorologicznych
3) Optymalizacja parametrów statku przy ograniczeniach określonych przez warunki nawigacyjne i hydrometeorologiczne:
� budowa modelu kryteriów i warunków optymalizacji,� opracowanie szczegółowych metod optymalizacji parametrów
statków:� statki samodzielnie manewrujące na budowanych akwenach w � statki samodzielnie manewrujące na budowanych akwenach w
różnych warunkach nawigacyjnych i hydrometeorologicznych,� statki manewrujące przy użyciu holowników na badanych akwenach
w różnych warunkach nawigacyjnych i hydrometeorologicznych,� optymalizacja ilości i parametrów holowników niezbędnych do
bezpiecznego wykonania manewru określonego typu (określone warunki manewrowe).

II Określenie dynamicznych i manewrowych cech statku, sterowanie ruchem statku.II Określenie dynamicznych i manewrowych cech statku, sterowanie ruchem statku.
1)Matematyczne symulatory nawigacyjne oparte na modelu hydrodynamicznym:
� modele symulacyjne ruchu statków pracujących w czasie rzeczywistym.
� Modele symulacyjne ruchu statków pracujące w czasie nierzeczywistym (przyspieszonym).
Zbudowane w oparciu:� analityczne i analityczno-eksperymentalne matematyczne modele
ruchu statków � znacznie rzadziej modele eksperymentalne.

PrzykładPrzykład

2) Budowa modeli predykcji ruchu statków służących głównie do:� wspomagania manewrowania statku na akwenach ograniczonych.
Modele te współpracują z nawigacyjnymi systemami informacyjnymi (ECDIS) lub niektórymi systemami map elektronicznych (ECS) [6]. Określają one przewidywaną trajektorię ruchu statku w wybranych przedziałach czasowych;
II Określenie dynamicznych i manewrowych cech statku, sterowanie ruchem statku.II Określenie dynamicznych i manewrowych cech statku, sterowanie ruchem statku.
� wspomaganie regulacji ruchu statków w systemie VTS (Vessel Traffic Service).
� opisu procesu decyzyjnego nawigatora kierującego statkiem na akwenach ograniczonych.
III Identyfikacja charakterystyk strumieni ruchu statków i sterowanie nimi.III Identyfikacja charakterystyk strumieni ruchu statków i sterowanie nimi.
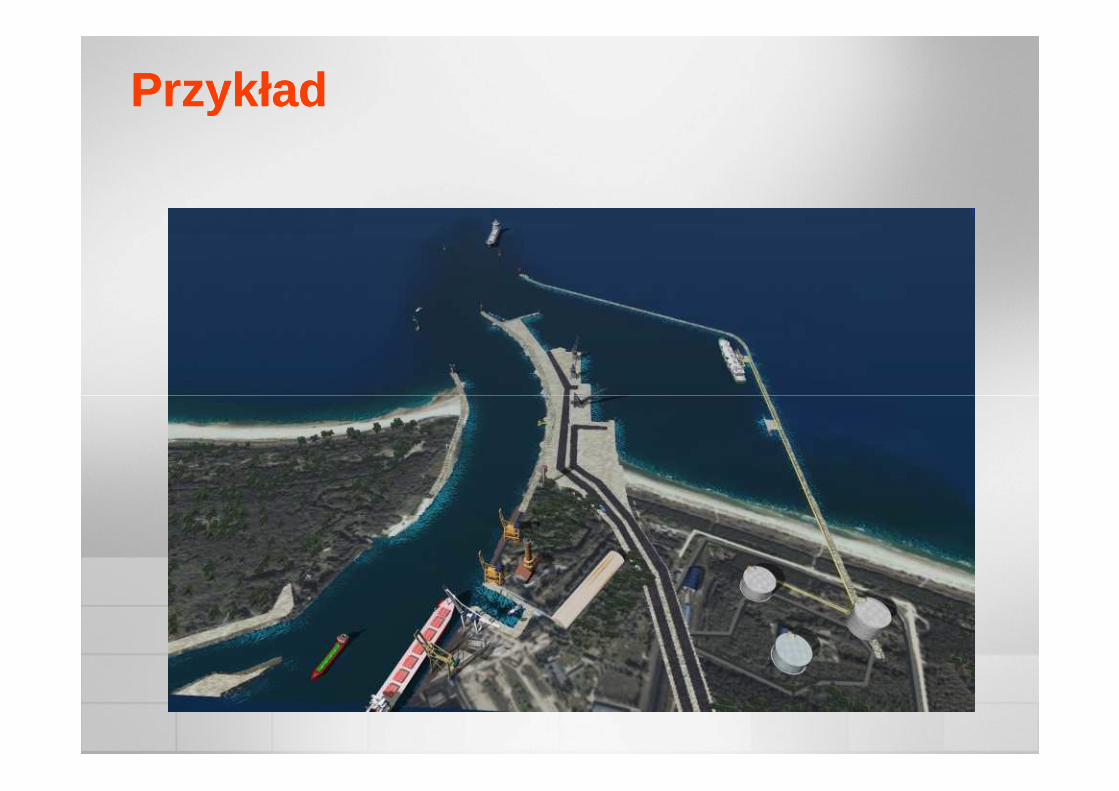
1)Określenie parametrów strumieni ruchu statków na drogach wodnych:� określenie eksploatacyjnej i dopuszczalnej przepustowości dróg
wodnych lub ich elementów w oparciu o kryteria bezpieczeństwa nawigacji.
� określenie typu i parametrów rozkładu ruchu statków oraz ich ograniczeń dla różnych elementów dróg wodnych,
� budowa modeli matematycznych strumieni ruchu statków na określonych rodzajach dróg wodnych lub ich elementach. Służą one do badań wzajemnych zależności między parametrami drogi wodnej.
PrzykładPrzykład
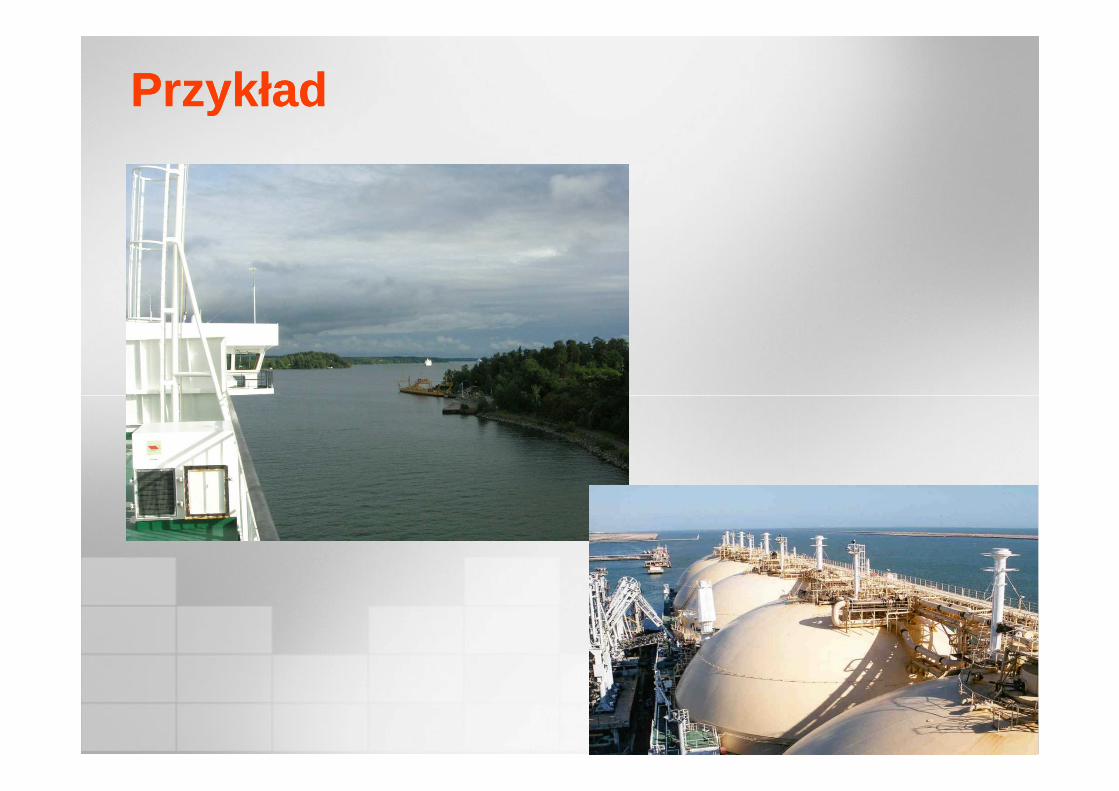
2) Regulacja ruchu statków na drogach wodnych różnego typu:� budowa matematycznych modeli sterowania ruchu w określonych
systemach dróg wodnych i ich elementach. Znalazły one zastosowanie w badaniach systemów VTS oraz do badań wzajemnych zależności między parametrami drogi wodnej i strumieni ruchu oraz systemami regulacji,
III Identyfikacja charakterystyk strumieni ruchu statków i sterowanie nimi.III Identyfikacja charakterystyk strumieni ruchu statków i sterowanie nimi.
� optymalizacja parametrów systemu regulacji ruchu dla różnych typów dróg wodnych i ich elementów. Opracowanie szczegółowych metod optymalizacji parametrów dla różnych systemów regulacji ruchu. Opracowanie uniwersalnych metod optymalizacji parametrów systemu regulacji ruchu.
Akwen ograniczonyAkwen ograniczony
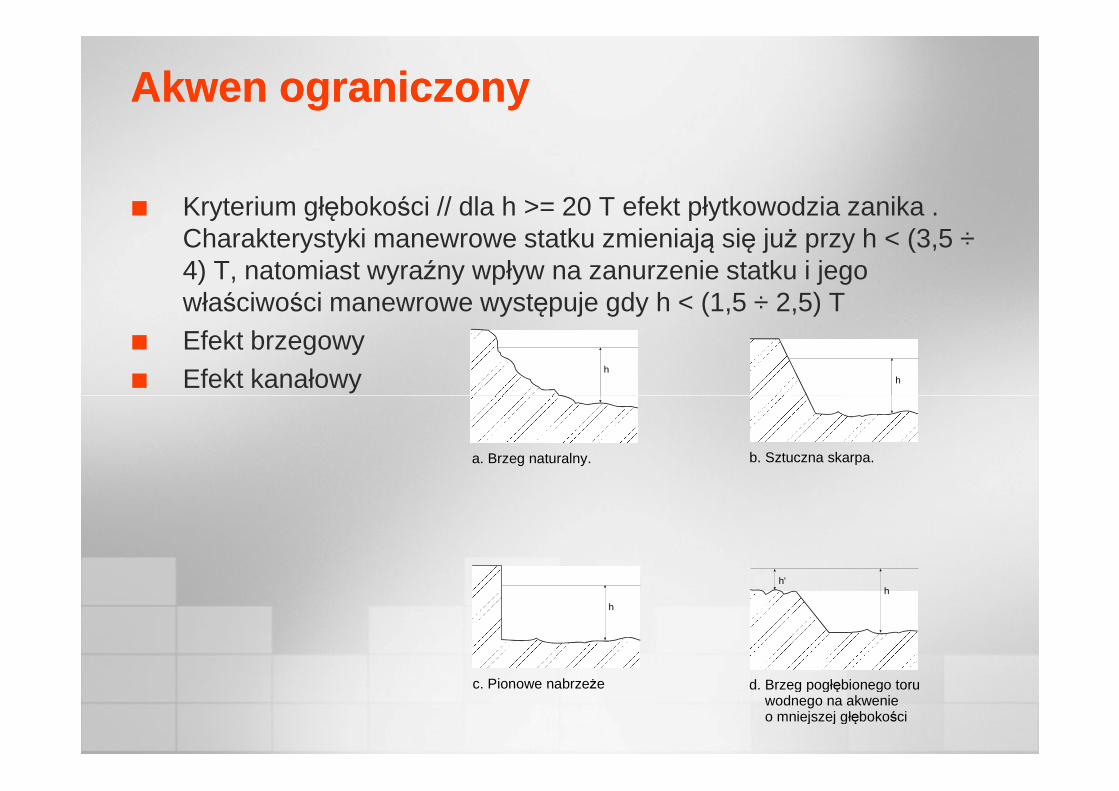
� Kryterium głębokości // dla h >= 20 T efekt płytkowodzia zanika . Charakterystyki manewrowe statku zmieniają się już przy h < (3,5 ÷4) T, natomiast wyraźny wpływ na zanurzenie statku i jego właściwości manewrowe występuje gdy h < (1,5 ÷ 2,5) T
� Efekt brzegowy � Efekt kanałowy h
h
h
hh'
a. Brzeg naturalny. b. Sztuczna skarpa.
c. Pionowe nabrzeże d. Brzeg pogłębionego toru wodnego na akwenie o mniejszej głębokości

PrzykładPrzykład
Bezpiecze ństwo nawigacji Bezpiecze ństwo nawigacji obejmuje całokształt zagadnień związanych z bezawaryjnym przeprowadzeniem
statku z punktu A do punktu B.
Pod pojęciem awarii należy rozumieć awarie nawigacyjne lub manewrowe, takie jak:
� wejście na mieliznę (rozumiane w szerokim znaczeniu tego słowa jako niezamierzone zetknięcia kadłuba, stera, czy śruby z dnem akwenu),niezamierzone zetknięcia kadłuba, stera, czy śruby z dnem akwenu),
� uszkodzenie kadłuba podczas kontaktu statku z brzegiem (powstałe podczas uderzenia statku w element brzegowy, przy którym głębokość akwenu jest większe od zanurzenia statku),
� uszkodzenie konstrukcji hydrotechnicznych lub portowych przez kontakt bezpośredni statku lub jako efekt działania strumienia zaśrubowego,
� uszkodzenie holownika współuczestniczącego w manewrowaniu,� uszkodzenie pływającego znaku nawigacyjnego,� kolizja z innym statkiem znajdującym się na danym akwenie (statki
przycumowane do nabrzeża, na kotwicy lub w ruchu).

PrzykładPrzykład
most .mpegmost .mpeg
Bezpiecze ństwo nawigacjiBezpiecze ństwo nawigacji
Ai - parametry akwenu,
Pi = f(Ai, Si, Ni, Hi, Mi, Ii, Ri )gdzie:
Ai - parametry akwenu,
Si - parametry statku,
Ni - parametry systemów określania pozycji,
Hi - parametry warunków hydrometeorologicznych,
Mi - parametry wykonywanego manewru,
Ii - parametry intensywności ruchu,
Ri - parametry systemu regulacji ruchu.

DziękujeDziękujeLiteratura� Inżynieria Ruchu Morskiego S. Gucma 2001� Dudziak J. „Teoria okrętu”, Wydawnictwo Morskie, Gdańsk 1988.� Galor W. „Analiza stosowanych miar w inżynierii ruchu morskiego”. Zeszyty Naukowe
nr 53 Wyższej Szkoły Morskiej w Szczecinie, 1997� Gucma S. „Model of vessel’s manoeuvring in limited sea areas in navigational risk
aspect”. Archives of Transport, volum 12 issue 1. Warsaw 2000.� Gucma S., Jagniszczak J. „Nawigacja morska dla kapitanów”. Wydawnictwo Foka,
Szczecin 1997.� Jurdziński M. „Planowanie nawigacji w obszarach ograniczonych”. Wyższa Szkoła
Morska, Gdynia 1999.� Nowicki A. „Wiedza o manewrowaniu statkami morskimi”. Wydawnictwo Morskie,
Gdańsk 1978.
Proszę przeczytać Rozdział 1 IRM // next time kartkówka z tego
Related Documents











