Introduction to the Discrete Fourier Transform Lucas J. van Vliet www.ph.tn.tudelft.nl/~lucas TU Delft TNW: Faculty of Applied Sciences IST: Imaging Science and technology PH: Pattern Recognition Group Discrete Fourier Transform 2 TU Delft Pattern Recognition Group Linear Shift Invariant System A discrete image can be decomposed into a weighted field of equi-spaced impulses. ( ) f x ( ) gx LSI system ( ) hx ( ) ( )( ) n f x f n x n δ +∞ =−∞ = − ∑ ( ) a x δ ( ) ah x linear ( ) x n δ − ∆ ( ) hx n − shift inv. ( ) ( )( ) n f x f n x n δ +∞ =−∞ = ∆ − ∆ ∑ ( ) ( ) ( ) ( ) ( ) n gx f nhx n f x hx +∞ =−∞ = − ≡ ∗ ∑ superposition ( ) x δ ( ) hx h(x) = impulse response or Point Spread Function (PSF) Image g is the result of a convolution between image f and h impulse at position n amplitude at position n

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
Introduction to theDiscrete Fourier Transform
Lucas J. van Vlietwww.ph.tn.tudelft.nl/~lucas
TU DelftTNW: Faculty of Applied SciencesIST: Imaging Science and technologyPH: Pattern Recognition Group
Discrete Fourier Transform 2
TU DelftPattern Recognition Group
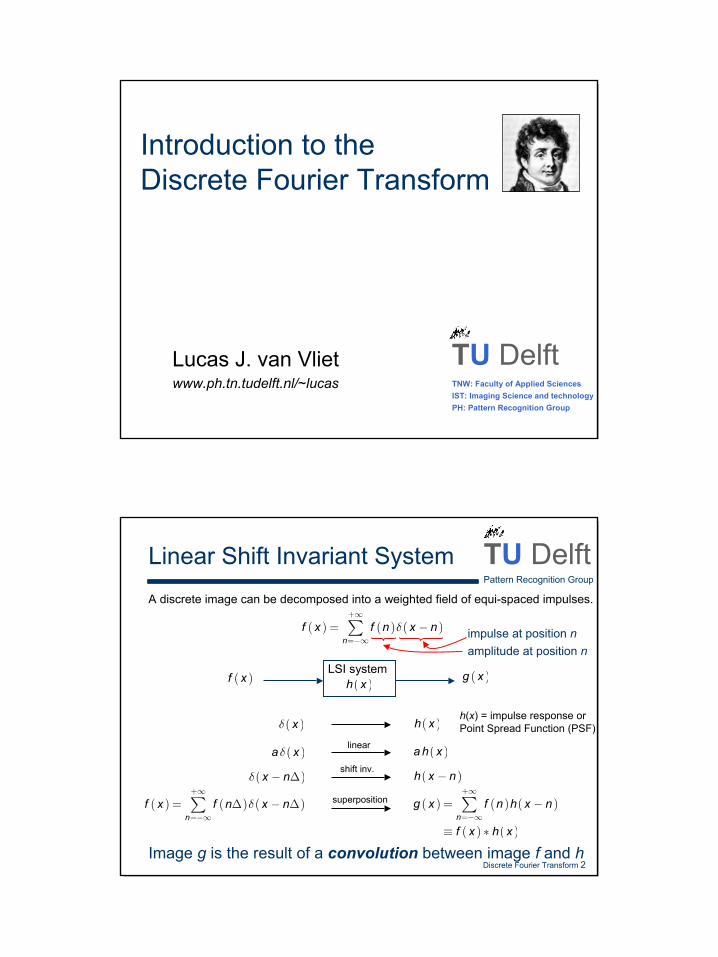
Linear Shift Invariant SystemA discrete image can be decomposed into a weighted field of equi-spaced impulses.
( )f x ( )g xLSI system( )h x
( ) ( ) ( )n
f x f n x nδ+∞
=−∞= −∑
( )a xδ ( )a h xlinear
( )x nδ − ∆ ( )h x n−shift inv.
( ) ( ) ( )n
f x f n x nδ+∞
=−∞= ∆ − ∆∑ ( ) ( ) ( )
( ) ( )n
g x f n h x n
f x h x
+∞
=−∞= −
≡ ∗
∑superposition
( )xδ ( )h xh(x) = impulse response or Point Spread Function (PSF)
Image g is the result of a convolution between image f and h
impulse at position namplitude at position n
2
Discrete Fourier Transform 3
TU DelftPattern Recognition Group
Convolution revisitedConvolution: Replace the central pixel by a weighted sum of the gray-values inside an nxn neighborhood. Impulse response h(x) is the filter.
Gauss σ=11 1
1 142
2 22
1 -1
1 -100
2 -20
0 0
0 0–41
1 11
Gauss σ=4
Discrete Fourier Transform 4
TU DelftPattern Recognition Group
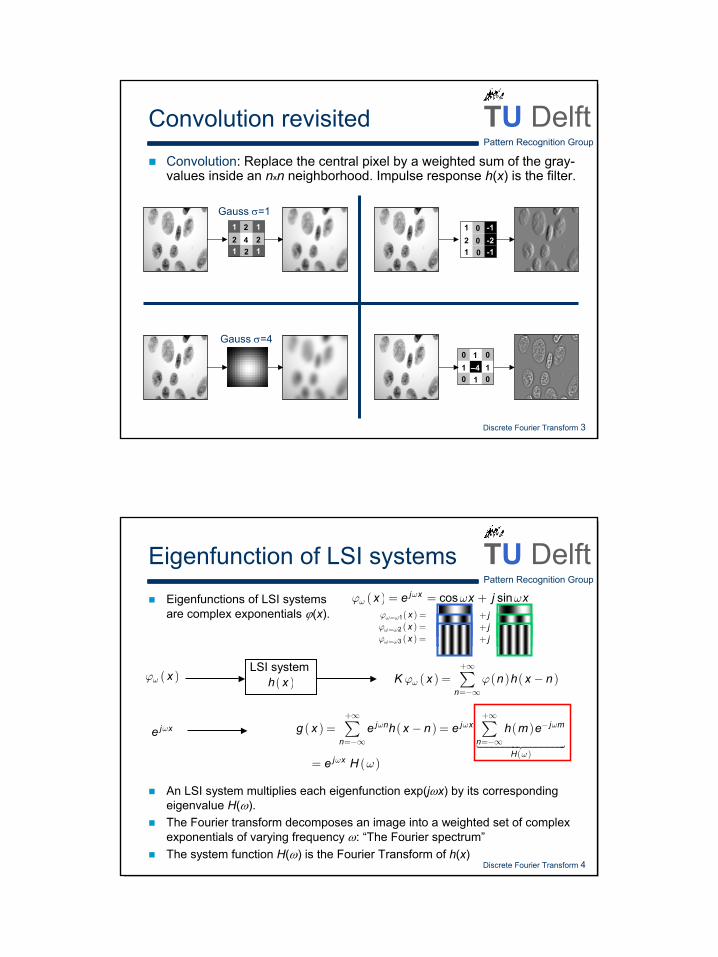
Eigenfunction of LSI systemsEigenfunctions of LSI systems are complex exponentials ϕ(x).
( )xωϕ ( ) ( ) ( )n
K x n h x nωϕ ϕ+∞
=−∞= −∑
LSI system( )h x
( ) cos sinj xx e x j xωωϕ ω ω= = +
An LSI system multiplies each eigenfunction exp(jωx) by its corresponding eigenvalue H(ω).The Fourier transform decomposes an image into a weighted set of complex exponentials of varying frequency ω: “The Fourier spectrum”The system function H(ω) is the Fourier Transform of h(x)
( ) ( ) ( )
( )
j n j x j m
n nH
g x e h x n e h m eω ω ω
ω
+∞ +∞−
=−∞ =−∞= − =∑ ∑j xe ω
( )j xe Hω ω=
( )1 xω ωϕ = = j+( )2 xω ωϕ = = j+( )3 xω ωϕ = = j+

3
Discrete Fourier Transform 5
TU DelftPattern Recognition Group
Convolution property
A convolution between an image f(x) and an impulse response h(x) in space, corresponds to a multiplication of the Fourier spectra F(ω) and H(ω) in the Fourier domain.
LSI system( )h x( )f x ( ) ( ) ( ) ( )
nf x h x f n h x n
+∞
=−∞∗ = ∆ − ∆∑
( ) ( ){ } ( ) ( )
( )
( )
( )
( )
( ) ( )
j x
x n
j n j m
n xF H
F f x h x f n h x n e
f n e h m e
F H
ω
ω ω
ω ω
ω ω
+∞ +∞−
=−∞ =−∞
+∞ +∞− −
=−∞ =−∞
∗ = −
=
=
∑ ∑
∑ ∑
Discrete Fourier Transform 6
TU DelftPattern Recognition Group
Gaussian derivativesHow to compute a derivative in digital space?
Introduce (Gaussian) scale
Derivative at scale σ is computed by convolution of the discrete image f[x,y] with discrete Gaussian derivative
Note that the Gaussian function is known analytically, compute the derivative(s), and then sample to produce a discrete filter. Thesampling of the Gaussian should be high enough, i.e. σ > 0.9 pixels
( ) [ ] ( ) [ ] ( ) [ ]( ) [ ] ( ) [ ] ( ) [ ]
0
5 3 4
, , ,
, , ,
f x y f x y g x y
f x y f x y g x y
σ σ
σ σ σ= = =
= ⊗
= ⊗
[ ] [ ], , ?xf x y f x yx∂ =∂
( ) [ ] ( ) [ ] ( ) [ ]0, , ,x xf x y f x y g x yσ σ= ⊗

4
Discrete Fourier Transform 7
TU DelftPattern Recognition Group
Fourier filters: Gaussian
F
|G| |G| |G|
|FG| |FG| |FG||F|
f f*g f*g f*g
g g g
Discrete Fourier Transform 8
TU DelftPattern Recognition Group
Gaussian derivative filtersIn continuous space: the derivative operator corresponds to multiplication of the Fourier spectrum with jω
( ) ( )
( ) ( )
( ) ( )2
22
F
F
F
f x F
d f x j Fdxd f x Fdx
ω
ω ω
ω ω
←→
←→
←→ −
In discrete space: combine the derivative operator with Gaussian smoothing
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )
( )
2( ) 2
2
F
F
F
g x f x G F
d g x f x j G Fdxd g x f x G Fdx
σ
σ
σ
ω ω
ω ω ω
ω ω ω
∗ ←→
∗ ←→
∗ ←→ −
σ=1 σ=2 σ=4 σ=1 σ=2 σ=4

5
Discrete Fourier Transform 9
TU DelftPattern Recognition Group
Fourier: Gaussian derivative
F
Im{Gx} Im{Gx} Im{Gx}
|FGx| |FGx| |FGx||F|
f f*gx f*gx f*gx
gx gx gx
Discrete Fourier Transform 10
TU DelftPattern Recognition Group
Fourier: Laplace & sharpening
F
|F|
f
Re{Gxx+Gyy}
|F(Gxx+Gyy)|
f*(gxx+gyy)
g xx+
g yy
Re{Gxx+Gyy}
|F(Gxx+Gyy)|
f*(gxx+gyy)
g xx+
g yy
f–2f*(gxx+gyy) f–2f*(gxx+gyy)
6
Discrete Fourier Transform 11
TU DelftPattern Recognition Group
Discrete Fourier Transform
Each image can be decomposed in weighted sum of complex exponentials (sines and cosines) of frequency fand angle φ. (or two frequency components u and v)
( ) ( )( )
( ) ( )( )
1 1 2
0 0
1 1 2
0 0
1, ,
1, ,
N N j ux vyN
u v
N N j ux vyN
u v
g x y G u v eN
G u v g x y eN
π
π
− − +
= =
− − − +
= =
=
=
∑∑
∑∑
For real-valued images: ( ){ } ( ){ }
( ){ } ( ){ }
Ev , Re ,
Od , Im ,
F
F
g x y G u v
g x y j G u v
←→
←→
image sizeNxN
Discrete Fourier Transform 12
TU DelftPattern Recognition Group
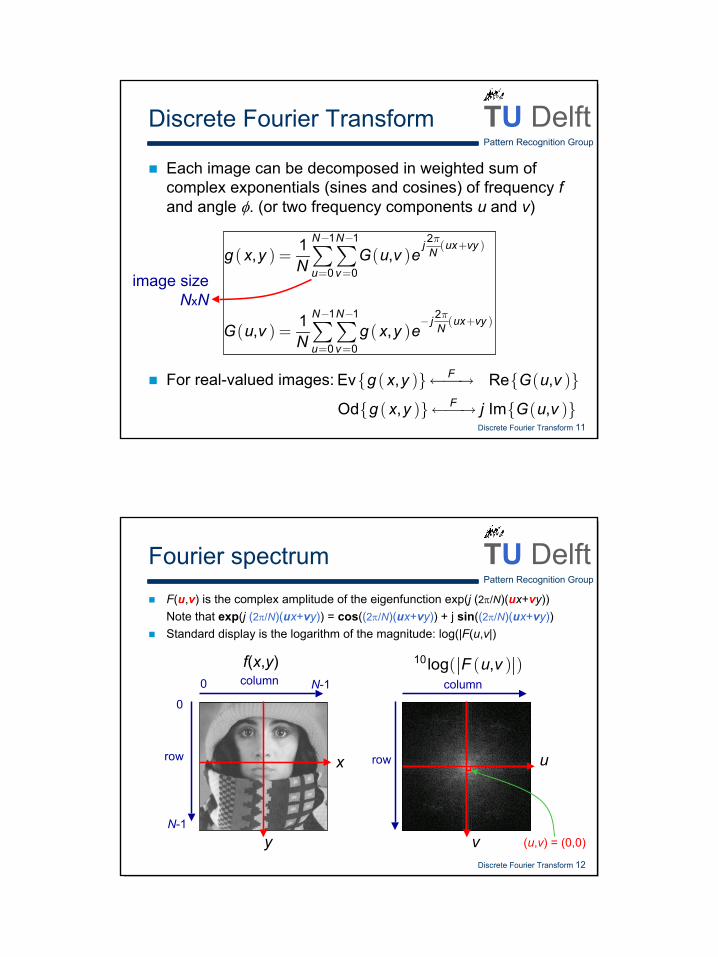
Fourier spectrumF(u,v) is the complex amplitude of the eigenfunction exp(j (2π/N)(ux+vy))Note that exp(j (2π/N)(ux+vy)) = cos((2π/N)(ux+vy)) + j sin((2π/N)(ux+vy))Standard display is the logarithm of the magnitude: log(|F(u,v|)
u
v
x
y
column
row
column
row
0
0N-1
N-1(u,v) = (0,0)
f(x,y) ( )( )10log ,F u v

7
Discrete Fourier Transform 13
TU DelftPattern Recognition Group
Getting used to Fourier (2)
An image is a weighted sum of cos (even) and sin (odd) images.
a+jba−jb
Fourier domain with complex amplitude: a+jb
Discrete Fourier Transform 14
TU DelftPattern Recognition Group
Eigenfunctions: Even & Odd
( )0 0
0
2 2
21 cos
1 2
j u x j u xN N
u xN
e eπ π
π
−
+ =
++( )0 0
0
2 2
2sin
2
j u x j u xN N
u xN
e ej
π π
π
−
=
−
( )( )
( )
1 102
102
,,
,N
u vu u v
u u v
δδ
δ
+ − + +
( )
( )
1021
102
,
,N
u u vj
u u v
δ
δ
− − + +
Real & even Real & odd
Real & even Imag & odd
F F

8
Discrete Fourier Transform 15
TU DelftPattern Recognition Group
Orientation & frequency
F F F
Discrete Fourier Transform 16
TU DelftPattern Recognition Group
Getting used to Fourier (1)
Graphite surface by Scanning Tunneling MicroscopyAtomic structure of graphite shows a hexagonal surface
column
row
0
0N-1
N-1
(c,r) = (½N,½N)(u,v) = (0,0)
x
y
u
v
(c,r) = (0,0)(u,v) = (-½N,-½N)
(c,r) = (N-1,N-1)(u,v) = (½N-1, ½N-1)

9
Discrete Fourier Transform 17
TU DelftPattern Recognition Group
SuperpositionFourier spectrum
= + + +
= + + +
F F F F F
Discrete Fourier Transform 18
TU DelftPattern Recognition Group
Fourier transforms
F
F
magnitude phase
10
Discrete Fourier Transform 19
TU DelftPattern Recognition Group
Magnitude & phase
F –1
F –1
( ),F u v
( ) ( )( )
, ,,
j F u v F u veF u v
=
?
?
Discrete Fourier Transform 20
TU DelftPattern Recognition Group
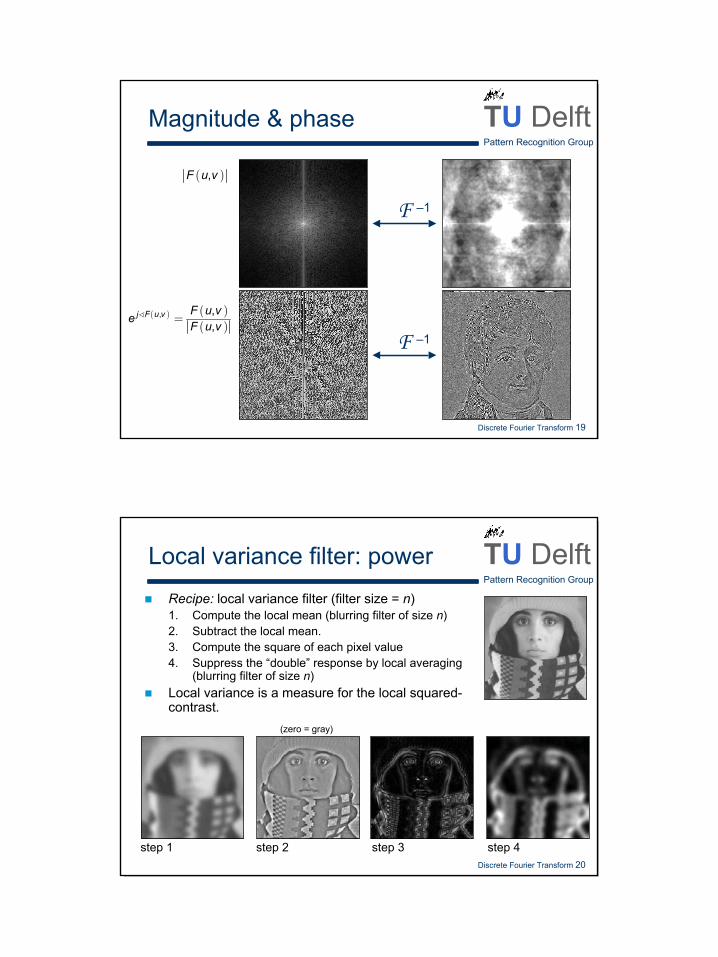
Local variance filter: powerRecipe: local variance filter (filter size = n)1. Compute the local mean (blurring filter of size n)2. Subtract the local mean.3. Compute the square of each pixel value4. Suppress the “double” response by local averaging
(blurring filter of size n)Local variance is a measure for the local squared-contrast.
step 1 step 2 step 3 step 4
(zero = gray)
11
Discrete Fourier Transform 21
TU DelftPattern Recognition Group
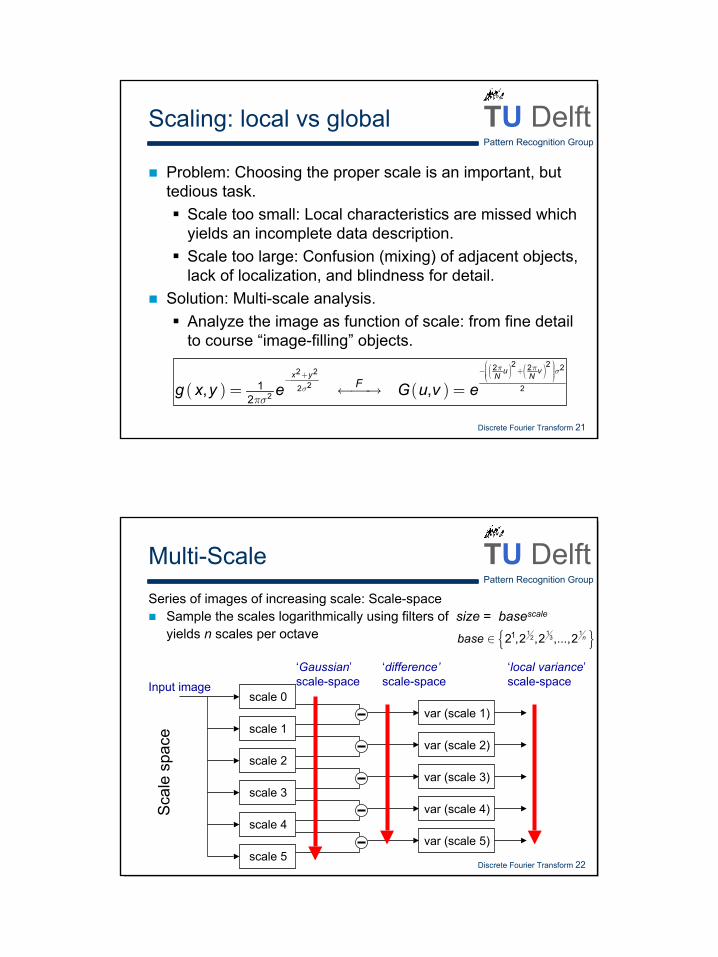
Scaling: local vs global
Problem: Choosing the proper scale is an important, but tedious task.
Scale too small: Local characteristics are missed which yields an incomplete data description.Scale too large: Confusion (mixing) of adjacent objects, lack of localization, and blindness for detail.
Solution: Multi-scale analysis.Analyze the image as function of scale: from fine detail to course “image-filling” objects.
( ) ( )( ) ( )2 22 2 22 2
22 22
12
, ,u vx y N N
Fg x y e G u v eπ π σ
σπσ
− + + −= ←→ =
Discrete Fourier Transform 22
TU DelftPattern Recognition Group
Multi-ScaleSeries of images of increasing scale: Scale-space
Sample the scales logarithmically using filters of size = basescale
yields n scales per octave
Input imagescale 0
scale 1
scale 2
scale 3
scale 4
scale 5
var (scale 1)
var (scale 2)
var (scale 3)
var (scale 4)
var (scale 5)
‘local variance’ scale-space
{ }11 13212 ,2 ,2 ,...,2 nbase ∈
‘difference’scale-space
Scal
e sp
ace
‘Gaussian’scale-space
12
Discrete Fourier Transform 23
TU DelftPattern Recognition Group
1
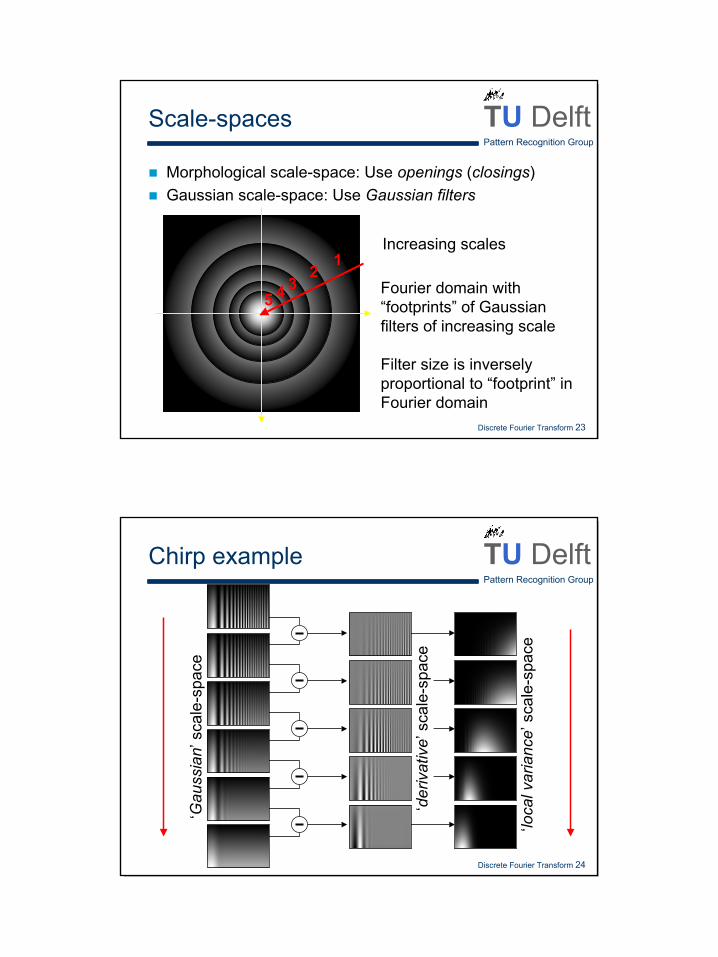
Scale-spaces
Morphological scale-space: Use openings (closings)Gaussian scale-space: Use Gaussian filters
Increasing scales
Fourier domain with “footprints” of Gaussian filters of increasing scale
Filter size is inversely proportional to “footprint” in Fourier domain
2345
Discrete Fourier Transform 24
TU DelftPattern Recognition Group
Chirp example
‘der
ivat
ive’
sca
le-s
pace
‘loca
l var
ianc
e’ s
cale
-spa
ce
‘Gau
ssia
n’sc
ale-
spac
e
13
Discrete Fourier Transform 25
TU DelftPattern Recognition Group
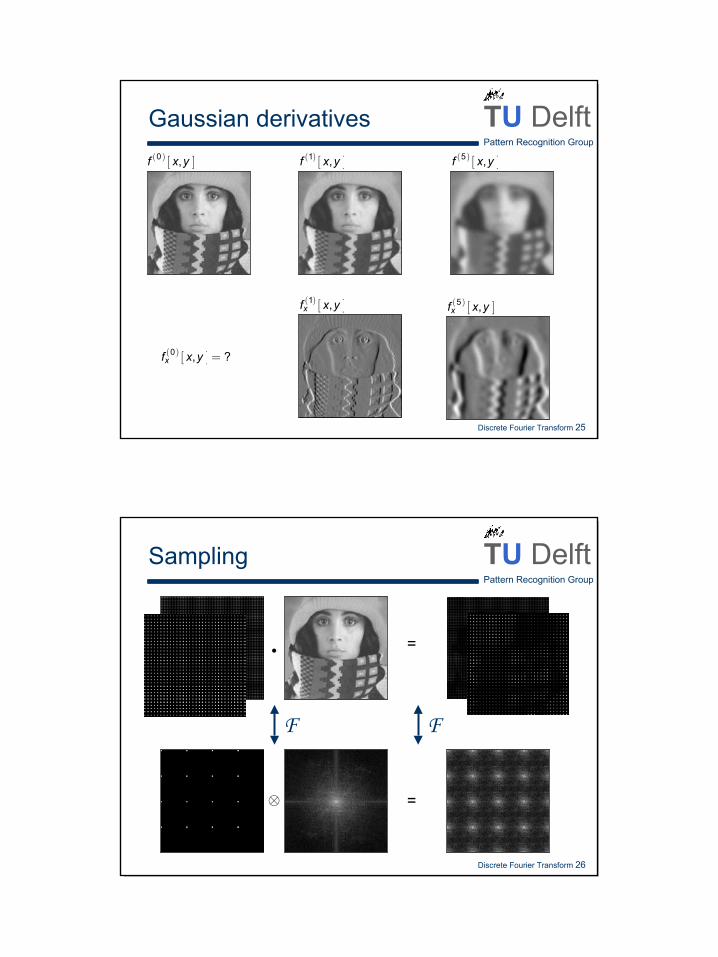
Gaussian derivatives
( ) [ ]0 , ?xf x y =
( ) [ ]1 ,xf x y ( ) [ ]5 ,xf x y
( ) [ ]1 ,f x y ( ) [ ]5 ,f x y( ) [ ]0 ,f x y
Discrete Fourier Transform 26
TU DelftPattern Recognition Group
Sampling
=
=⊗
i
F F
14
Discrete Fourier Transform 27
TU DelftPattern Recognition Group
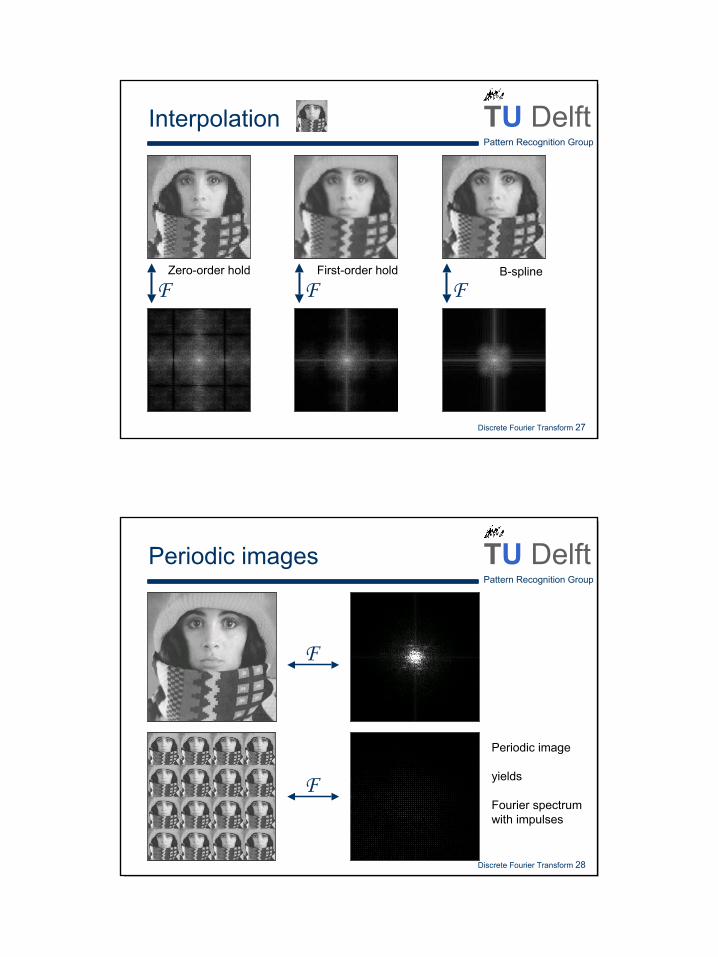
Interpolation
Zero-order hold First-order hold B-spline
F F F
Discrete Fourier Transform 28
TU DelftPattern Recognition Group
Periodic images
F
F
Periodic image
yields
Fourier spectrumwith impulses
Related Documents











