Introduction to Signal Estimation

Introduction to Signal Estimation. 94/10/142 Outline
Dec 21, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Introduction to Signal Estimation
94/10/1494/10/14 22
Outline
94/10/1494/10/14 33
Scenario For physical considerations, we know that the voltage is
between –V and V volts. The measurement is corrupted by
noise which may be modeled as an independent additive
zero-mean Gaussian random variable n. The observed
variable is r . Thus,
The probability density governing the observation process is
given as 2 221( )
2
nr a
a
n
p r e
r a n
94/10/1494/10/14 44
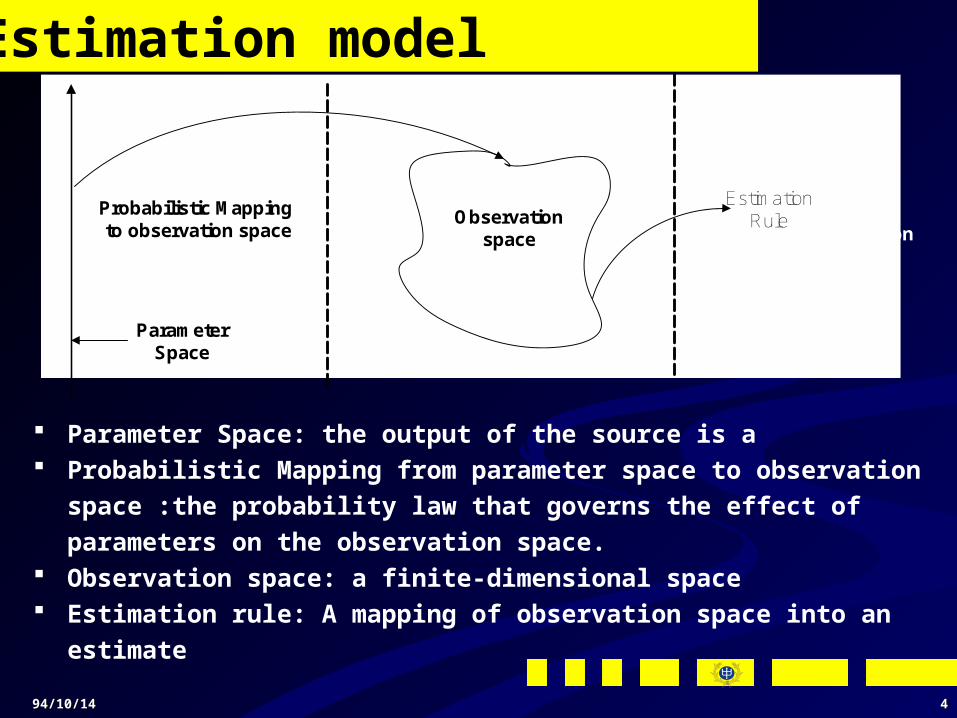
Estimation model
Parameter Space: the output of the source is a Probabilistic Mapping from parameter space to observation
space :the probability law that governs the effect of parameters on
the observation space. Observation space: a finite-dimensional space Estimation rule: A mapping of observation space into an estimate
Probabilistic Mapping to observation space
Observationspace
Decision ruleDecision
H0
H1
Parameter Space
Estimation Rule
94/10/1494/10/14 55
Parameter Estimation Problem In the composite hypothesis-testing problem , a family of di
stributions on the observation space, indexed by a paramete
r or set of parameters, a binary decision is wanted to make
about the parameter 。 In the estimation problem, values of parameters want to be
determined as accurately as possible from the observation e
nbodied 。 Estimation design philosophies are different due to
o the amount of prior information known about the parameter o the performance criteria applied 。 .
94/10/1494/10/14 66
Basic approaches to the parameter estimation Bayesian estimation:
o assuming that parameters under estimation are to be a random
quantity related statistically to the observation。 Nonrandom parameter estimation:
o the parameters under estimation are assumed to be unknown but
without being endowed with any probabilistic structure。
94/10/1494/10/14 77
Bayesian Parameter Estimation
Statement of problem:o : the parameter space and the parametero :random variable observation spaceo :denoting a distribution on the observation space , and map
ping from to
Finding a function s.t is the best guess of the true v
alue of based on the observation Y=y 。
Y ;p
: ˆ :
Obser.R.V.
y estimate
y y
94/10/1494/10/14 88
Bayesian Parameter Estimation
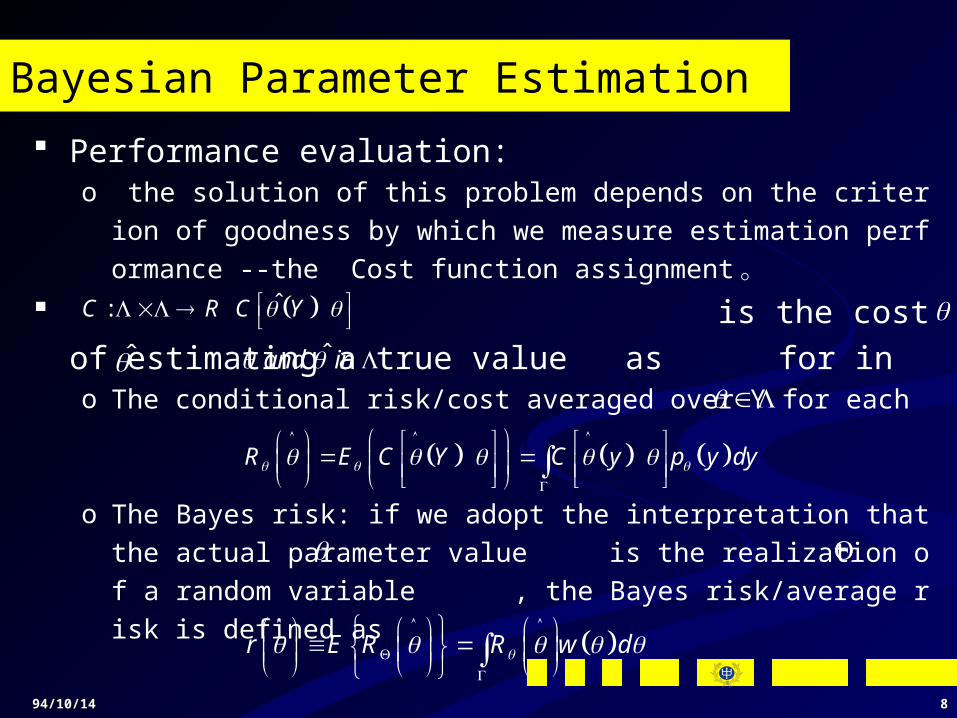
Performance evaluation:o the solution of this problem depends on the criterion of goodness by
which we measure estimation performance --the Cost function assig
nment 。 is the cost of estimating a true value a
s for in o The conditional risk/cost averaged over Y for each
o The Bayes risk: if we adopt the interpretation that the actual paramet
er value is the realization of a random variable , the Bayes risk/
average risk is defined as
ˆ:C R C Y
ˆand in
R E C Y C y p y dy
r E R R w d

94/10/1494/10/14 99
Bayesian Parameter Estimation
o where is the prior for random variable 。 the appropriate design
goal is to find an estimator minimizing , and the estimator is kno
wn as a Bayes estimate of o Actually , the conditional risk can be rewritten as
o the Bayes risk can be formulated as
o the Bayes risk can also be written as
w
ˆr
R E C Y E C Y
r E R E E C Y E C Y
r E R E C Y E E C Y Y E C Y Y y p y dy
94/10/1494/10/14 1010
Bayesian Parameter Estimation
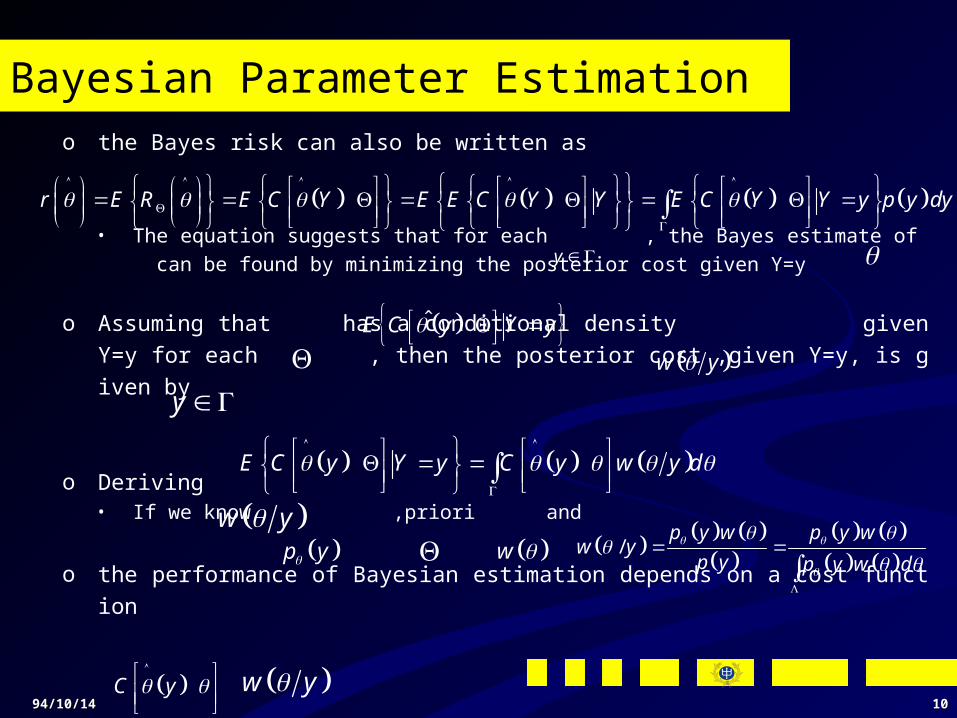
o the Bayes risk can also be written as
• The equation suggests that for each , the Bayes estimate of can be f
ound by minimizing the posterior cost given Y=y
o Assuming that has a conditional density given Y=y for each
, then the posterior cost ,given Y=y, is given by
o Deriving• If we know ,priori and
o the performance of Bayesian estimation depends on a cost function
w
r E R E C Y E E C Y Y E C Y Y y p y dy
y
ˆE C y Y y w y
y
E C y Y y C y w y d
w y
p y
/p y w p y w
w yp y p y w d
C y
w y
94/10/1494/10/14 1111
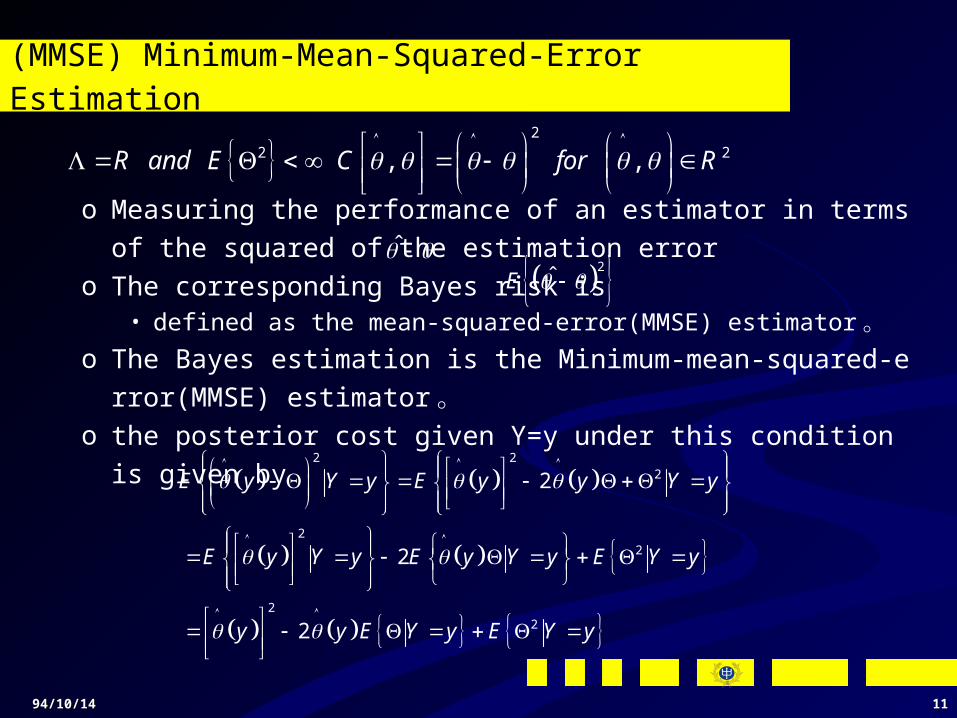
(MMSE) Minimum-Mean-Squared-Error Estimation
o Measuring the performance of an estimator in terms of the squared o
f the estimation erroro The corresponding Bayes risk is
• defined as the mean-squared-error(MMSE) estimator 。o The Bayes estimation is the Minimum-mean-squared-error(MMSE) e
stimator 。
o the posterior cost given Y=y under this condition is given by
2
2 2, ,R and E C for R
2ˆE
2 22
22
22
2
2
2
E y Y y E y y Y y
E y Y y E y Y y E Y y
y y E Y y E Y y

94/10/1494/10/14 1212
(MMSE) Minimum-Mean-Squared-Error Estimation
o the cost function is a quadratic form of ,and is a convex function 。
o Therefore, it achieves its unique minimum at the point where its deriv
ative with respective to is zero 。
o the conditional mean of given Y=y 。 The estimator is also sometim
es termed the conditional mean estimator-CME 。
000 DH 111 DH 000 DH 111 DH
y
y
2ˆˆ2 2 0
ˆ
E y Y yy E Y y
y
MMSE y E Y y w y d

94/10/1494/10/14 1313
(MMSE) Minimum-Mean-Squared-Error Estimation
Another derivation:
2 2
E y Y y y w y d
2ˆˆ2 0
ˆ
ˆ
E y Y yy w y d
y
y w y d w y d
ˆ y w y d E Y y

94/10/1494/10/14 1414
(MMAE) : Minimum-Mean-Absolute-Error Estimation
Measuring the performance of an estimator in terms of the a
bsolute value of the estimation error,
The corresponding Bayes risk is , which is defined as
the mean-absolute-error (MMAE) 。 The Bayes estimation is the Minimum-mean-absolute-error
(MMAE) estimator 。
2ˆ, ,R and E C for R
ˆE
94/10/1494/10/14 1515
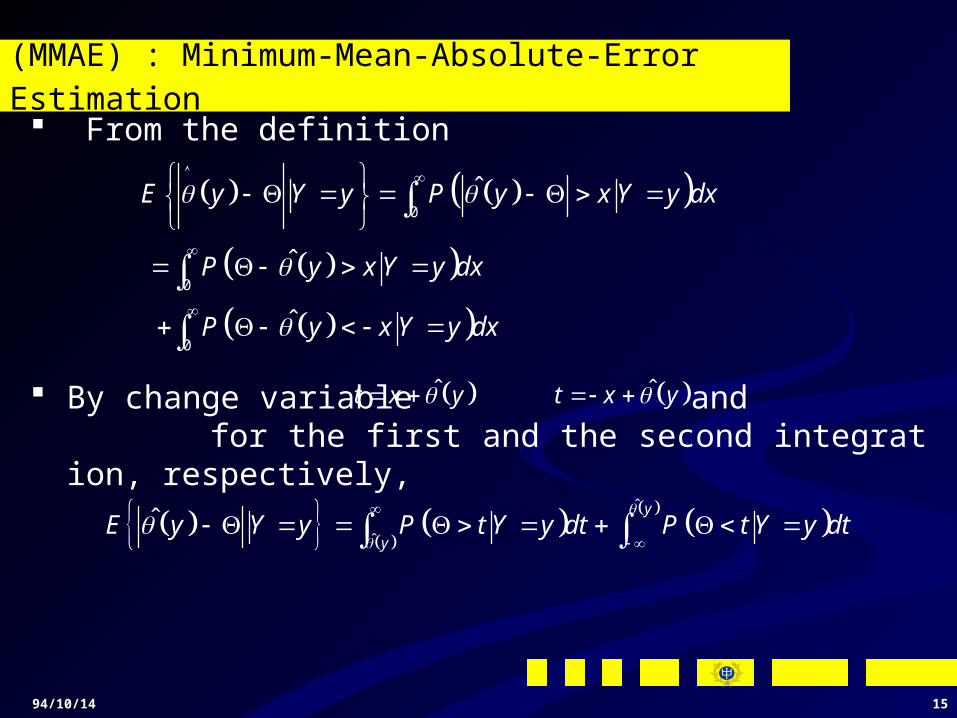
(MMAE) : Minimum-Mean-Absolute-Error Estimation From the definition
By change variable and for the first and the second integration, respectively,
0
0
0
ˆ
ˆ
ˆ
E y Y y P y x Y y dx
P y x Y y dx
P y x Y y dx
ˆt x y ˆt x y
ˆ
ˆˆ y
yE y Y y P t Y y dt P t Y y dt
94/10/1494/10/14 1616
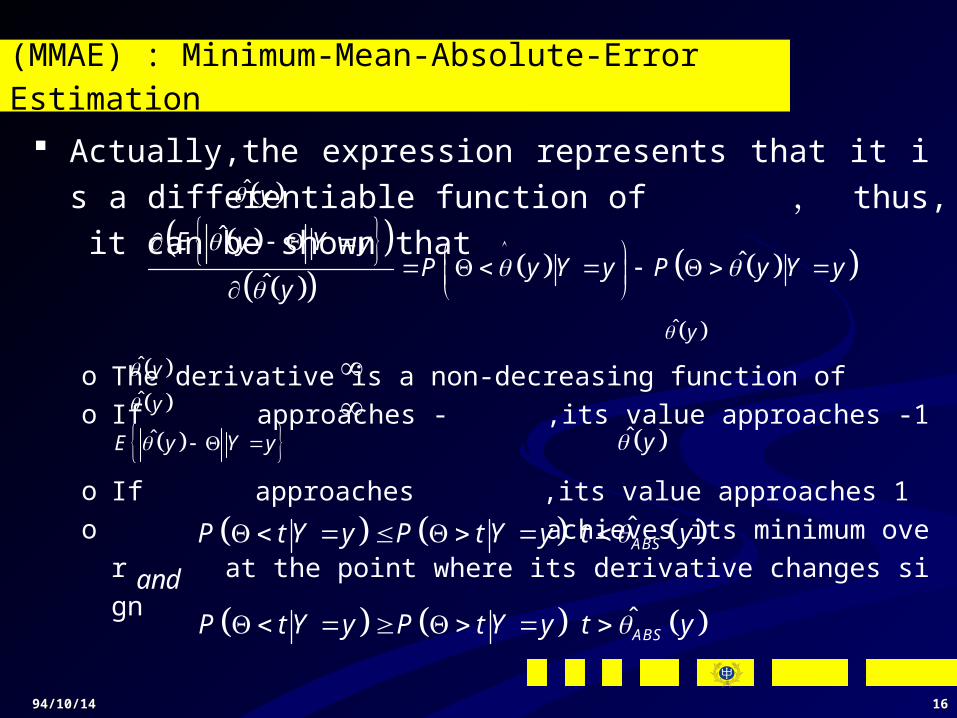
(MMAE) : Minimum-Mean-Absolute-Error Estimation
Actually,the expression represents that it is a differentiable f
unction of , thus, it can be shown that
o The derivative is a non-decreasing function ofo If approaches - ,its value approaches -1 o If approaches ,its value approaches 1o achieves its minimum over at the point where its d
erivative changes sign
ˆ y
ˆˆ
ˆ
E y Y yP y Y y P y Y y
y
ˆ y
ˆ y ˆ y ˆE y Y y ˆ y
ˆ
ˆ
ABS
ABS
P t Y y P t Y y t y
and
P t Y y P t Y y t y
94/10/1494/10/14 1717
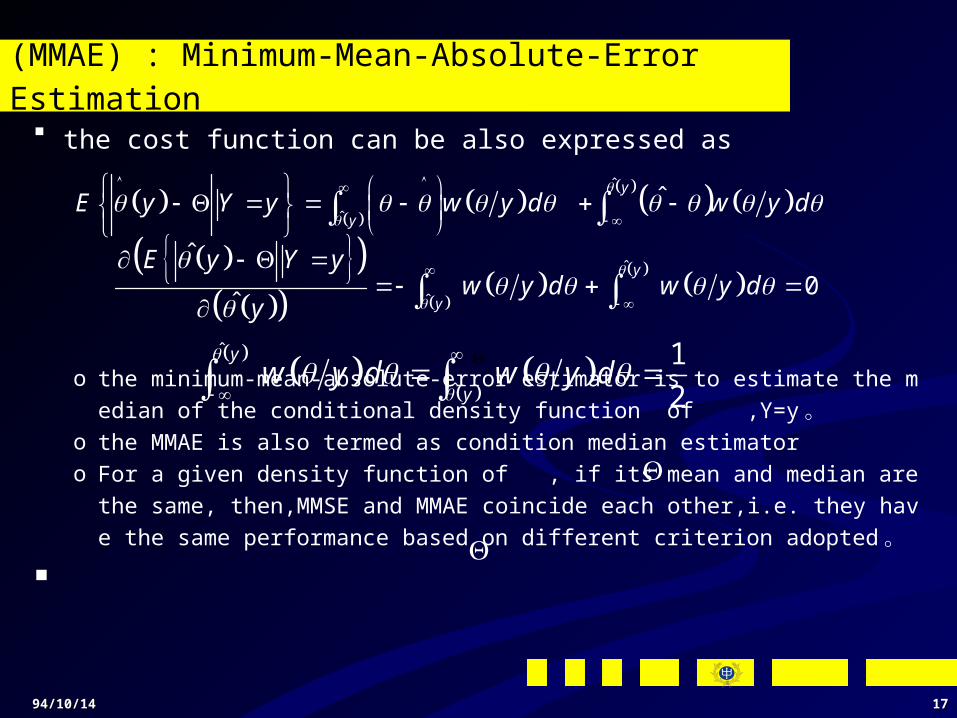
(MMAE) : Minimum-Mean-Absolute-Error Estimation the cost function can be also expressed as
o the minimum-mean-absolute-error estimator is to estimate the median of the co
nditional density function of ,Y=y 。o the MMAE is also termed as condition median estimator o For a given density function of , if its mean and median are the same, then,MM
SE and MMAE coincide each other,i.e. they have the same performance based
on different criterion adopted 。
ˆ
ˆˆy
yE y Y y w y d w y d
ˆ
ˆ
ˆ0
ˆ
y
y
E y Y yw y d w y d
y
ˆ
ˆ
1
2
y
yw y d w y d
94/10/1494/10/14 1818
MAP Maximum A posterior Probability Estimation
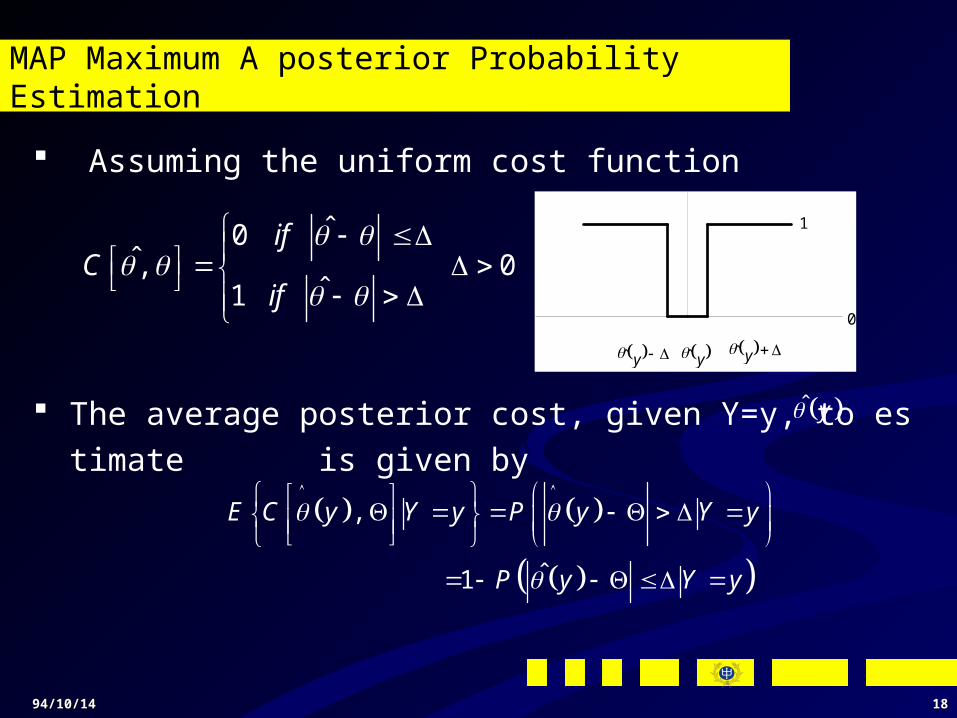
Assuming the uniform cost function
The average posterior cost, given Y=y, to estimate is giv
en by
ˆ0, 0
ˆ1
ifC
if
y y y
0
1
ˆ y
,
ˆ1
E C y Y y P y Y y
P y Y y

94/10/1494/10/14 1919
MAP Maximum A posterior Probability Estimation
Consideration I:o Assuming is a discrete random variable taking values in a finite set
and with the average posterior
cost is given as
which suggests that to minimize the average posterior cost,
The Bayes estimate in this case is given for each by any value
of which can maximizes the posterior probability over ,i.e. the Bayes estimate is the value of that has the maximum a po
sterior probability of occurring given Y=y
0 1M i j for i j
ˆ, 1
ˆ1
E C y Y y P Y y
w y
y
w y
94/10/1494/10/14 2020
MAP Maximum A posterior Probability Estimation
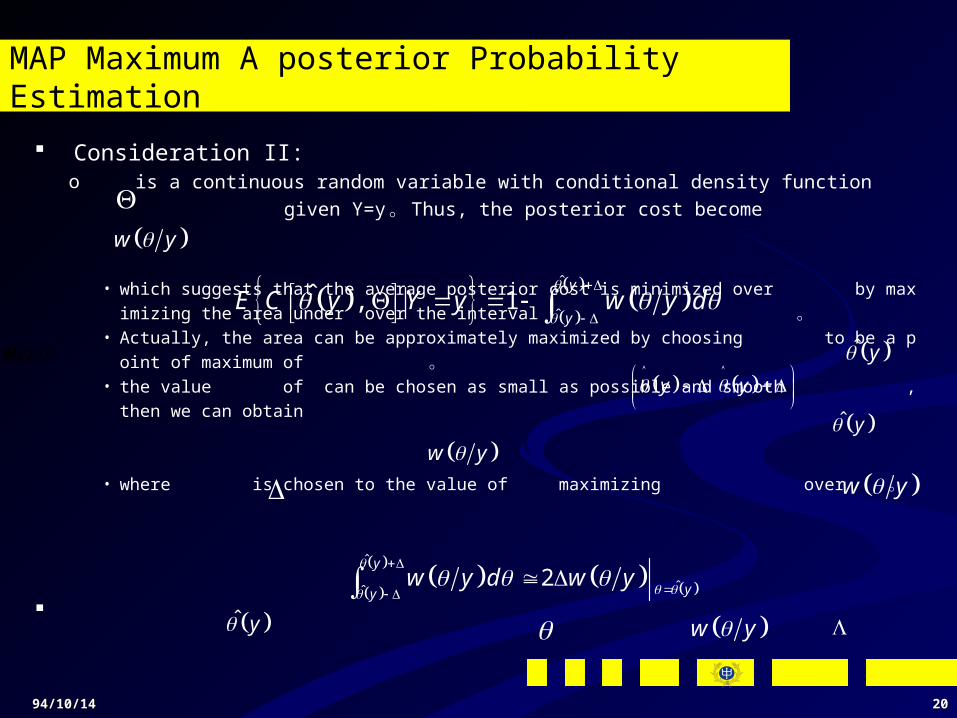
Consideration II: o is a continuous random variable with conditional density function
given Y=y 。 Thus, the posterior cost become
• which suggests that the average posterior cost is minimized over by maximizing the area
under over the interval 。 • Actually, the area can be approximately maximized by choosing to be a point of maximum
of 。 • the value of can be chosen as small as possible and smooth , then we can obtain
• where is chosen to the value of maximizing over 。
w y
ˆ
ˆˆ , 1
y
yE C y Y y w y d
ˆ y y y
ˆ y w y
w y
ˆ
ˆˆ2
y
yyw y d w y
y yw
ˆ y w y
94/10/1494/10/14 2121
MAP Maximum A posterior Probability Estimation
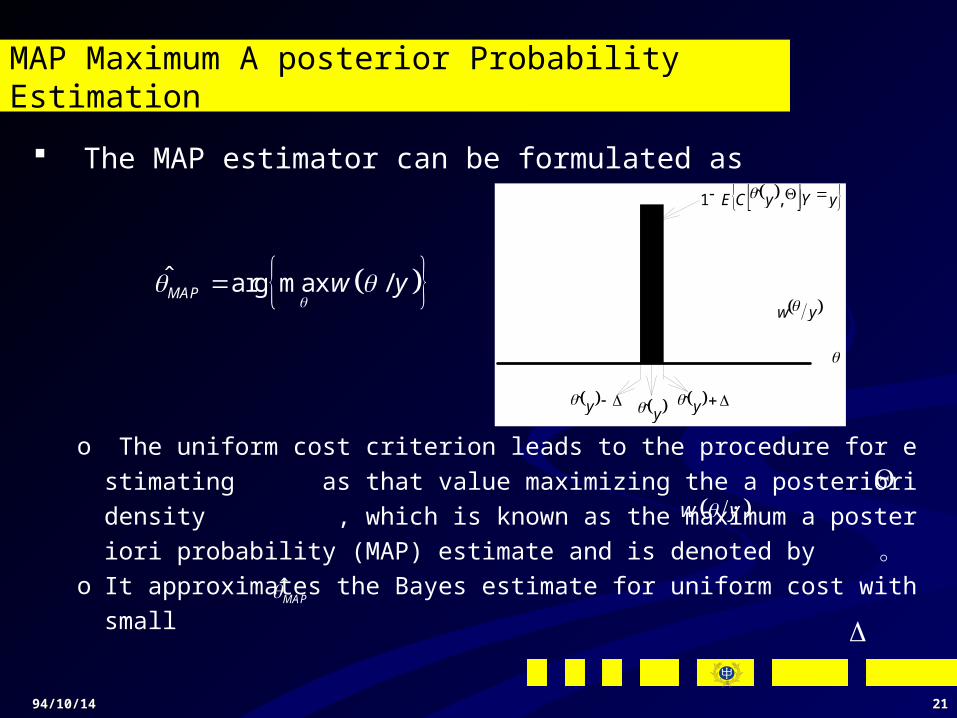
The MAP estimator can be formulated as
o The uniform cost criterion leads to the procedure for estimating a
s that value maximizing the a posteriori density , which is know
n as the maximum a posteriori probability (MAP) estimate and is den
oted by 。 o It approximates the Bayes estimate for uniform cost with small
ˆ arg max /MAP w y
yw
y y y
yYyCE ,ˆ1
w y
MAP
94/10/1494/10/14 2222
MAP Maximum A posterior Probability Estimation
The MAP estimates are often easier to compute than MMSE 、 MMAE , or other estimates 。
A density achieves its maximum value is termed a mode of t
he corresponding probability 。 Therefore, the MMSE 、 M
MAE 、 and MAP estimates are the mean 、 median 、 and
mode of the corresponding distribution, respectively 。
94/10/1494/10/14 2323
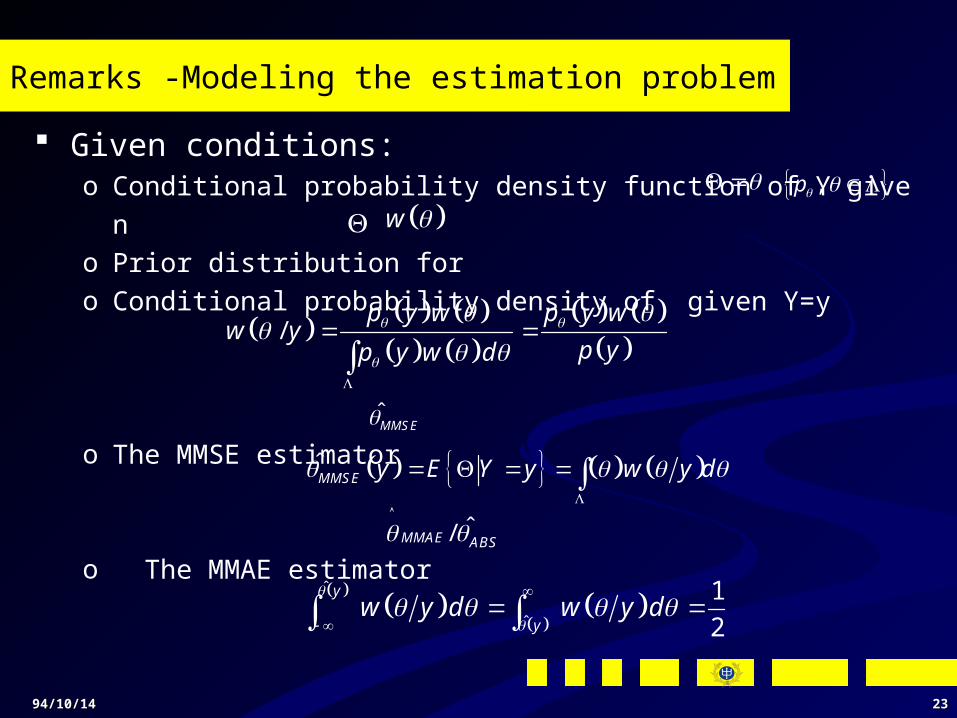
Remarks -Modeling the estimation problem
Given conditions: o Conditional probability density function of Y giveno Prior distribution foro Conditional probability density of given Y=y
o The MMSE estimator
o The MMAE estimator
,p
w
/p y w p y w
w yp yp y w d
MMSE y E Y y w y d
MMSE
ˆ/MMAE ABS
ˆ
ˆ
1
2
y
yw y d w y d

94/10/1494/10/14 2424
Remarks -Modeling the estimation problem
The MAP estimator
o For MAP estimator, it is not necessary to calculate because the
unconditional probability density of y does not affect the maximizatio
n over 。 o can be found by maximizing over . o For the logarithm is an increasing function, therefore, also maxim
izes over 。o If is a continuous random variable given Y=y , then for sufficie
nt smooth and ,a necessary condition for MAP is given by
MAP equation
MAP
ˆ arg max /MAP w y
p y
MAP p y w
MAP
log logp y w
p y w
log logMAP MAPy y
p y w
94/10/1494/10/14 2525
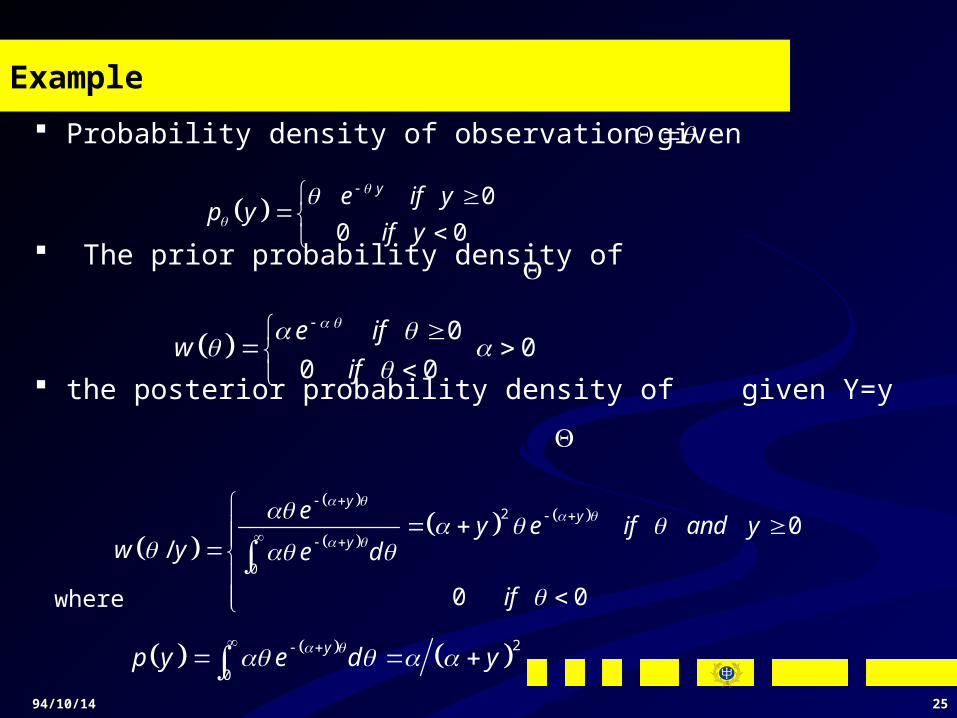
Example
Probability density of observation given
The prior probability density of
the posterior probability density of given Y=y
where
0
0 0
ye if yp y
if y
00
0 0
e ifw
if
2
0
0/
0 0
yy
y
ey e if and y
w y e d
if
2
0
yp y e d y
94/10/1494/10/14 2626
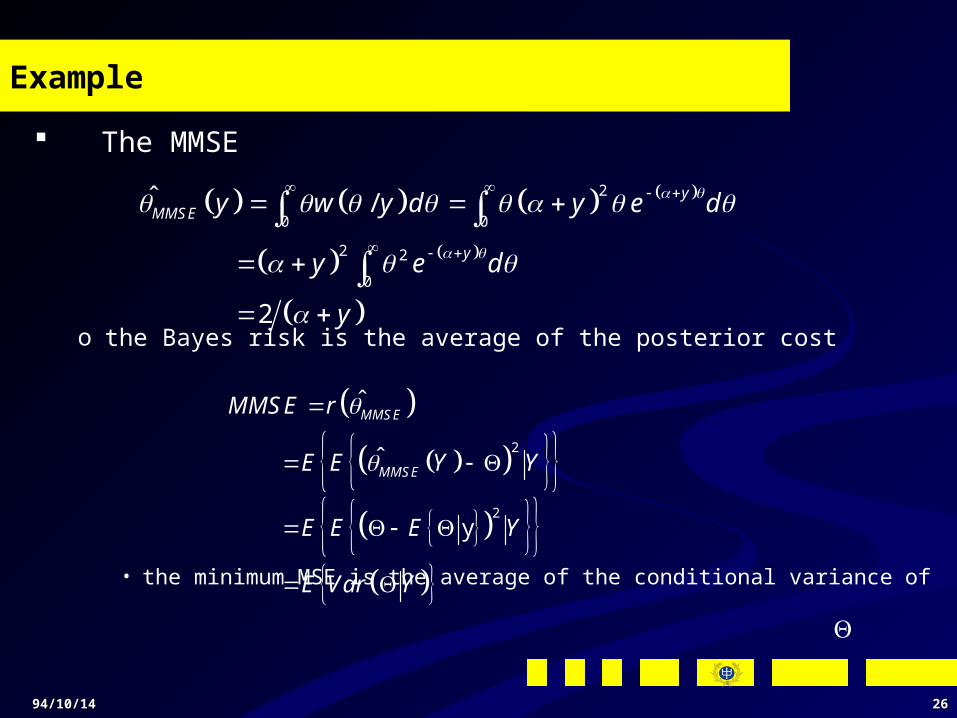
Example
The MMSE
o the Bayes risk is the average of the posterior cost
• the minimum MSE is the average of the conditional variance of
2
0 0
2 2
0
ˆ /
2
yMMSE
y
y w y d y e d
y e d
y
2
2
ˆ
ˆ
y
MMSE
MMSE
MMSE r
E E Y Y
E E E Y
E Var Y

94/10/1494/10/14 2727
Example
• the conditional variance given Y=y is shown as
• MMSE
2 2Var y E Y y E Y y
22
0
2 23
0
2
ˆ
4
2
MMSEVar y w y d y
y w y d y
y
0
2 2
0
2
2
2 3
MMSE E Var Y Var y p y dy
y y dy
94/10/1494/10/14 2828
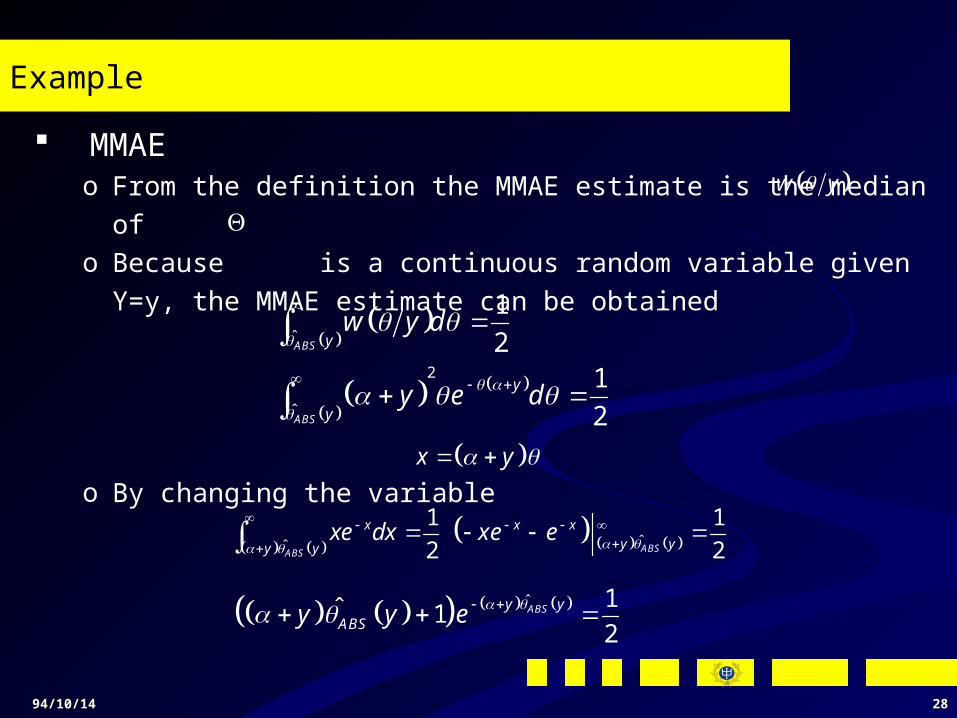
Example
MMAE o From the definition the MMAE estimate is the median ofo Because is a continuous random variable given Y=y, the MMAE e
stimate can be obtained
o By changing the variable
w y
ˆ
2
ˆ
1
21
2
ABS
ABS
y
y
y
w y d
y e d
x y
ˆˆ
1 1
2 2ABSABS
x x xy yy y
xe dx xe e
ˆ 1ˆ 12
ABSy yABSy y e

94/10/1494/10/14 2929
Example
o the solution is
• where T is the solution for ¸ and T~1.68.
The MAP
o
ABS
Ty
y
1 1 2TT e
max w y 2=max yy e
max ye
ˆ 0MAP
y ye y e
1
y
94/10/1494/10/14 3030
Example
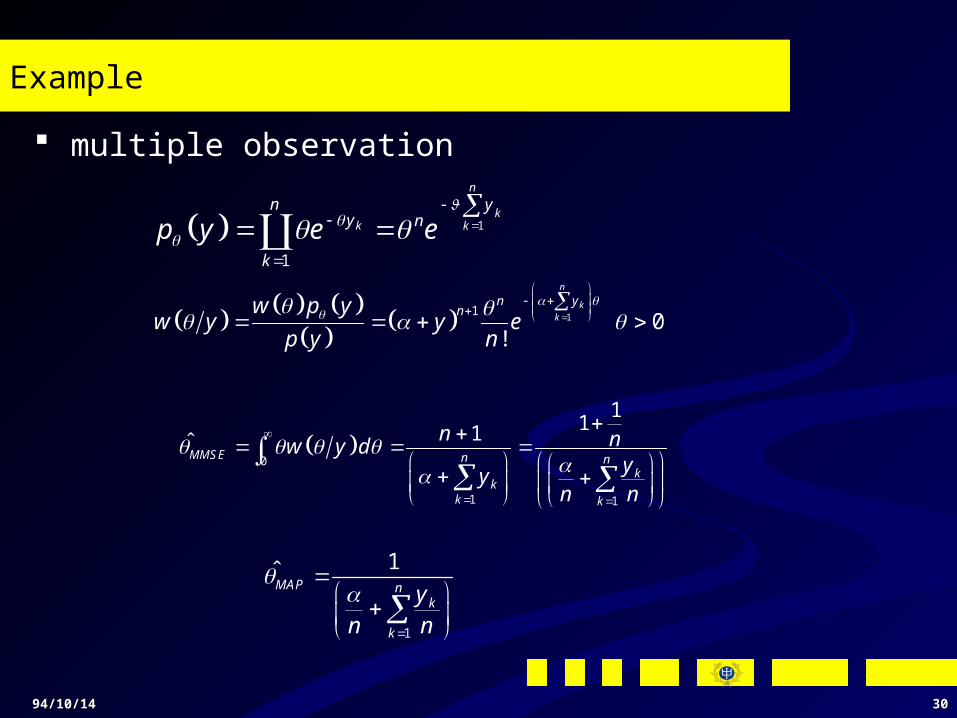
multiple observation
1
1
n
kk k
n yy n
k
p y e e
1
10
!
n
kk
ynnw p y
w y y ep y n
0
1 1
111
MMSE n nk
kk k
n nw y dyy
n n
1
1MAP n
k
k
yn n
94/10/1494/10/14 3131
Nonrandom parameter(real) estimation
A problem in which we have a parameter indexing the class
of observation statistics, that is not modeled as a random var
iable but nevertheless is unknown. Don’t have enough prior information about the parameter to
assign a prior probability distribution to it. Treat the estimation of such parameters in an organized ma
nner.
94/10/1494/10/14 3232
Statement of problem Given the observation Y=y, what is the best estimate of is real and no information about the true value of the only averaging of cost that we can be done is with respe
ct to the distribution of Y given ,the conditional risk
o we can not generally expect to minimize the conditional risk uniformlyo For any particular value of , the conditional mean-squared error
can be made zero by choosing to be identically for all observat
ions o However, it can be poor if the value of is not near the true value of
2ˆR E y
0 ˆ y 0
0

94/10/1494/10/14 3333
Statement of problem
o Unless o it is not a good estimator due to not with minimum conditional mean-
squared-error。
the conditional mean o if we say that the estimate is unbiasedo in general we have biased estimateo variance of estimatoro
2
0
2
0
2 2
0 0
ˆ
ˆ
ˆ ˆ2
E y
E y
E y E E y
0 2 2
0ˆ ˆE y E y
ˆ ˆE y y p y dy ˆE y
ˆ 0b E y b
2ˆ ˆvar E y E y

94/10/1494/10/14 3434
MVUE
2
22
22
22
ˆvar
ˆ ˆ2
ˆ ˆ2
ˆ
E y b
E y b E b y
E y b b E y
E y b
0b p for the unbias estimator ,and the variance is the cond
itional mean-squared error under
The best we can hope for is minimum variance unbiased es
timator-MVUE
0b
p
2ˆvar E y
94/10/1494/10/14 3535
Q & A
Related Documents











