Introduction to Remotely Operated Vehicles ROVs Drones mark first

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Introduction to Remotely Operated
VehiclesROVs
Drones mark first

Robot
• A robot is a servo-mechanical system able to perform complex operations, often heavy, repetitive or dangerous for human being
• The term has been firstly used by the Czech writer Karel Capek in his ˇ play R.U.R. (Rossum’s Universal Robots) in 1920.
• Origins from the Czech word “robota”, which means work.
• First industrial robot created in 1954. Who Invented the 1st Robot

Robot History Videos
- How Robots are made and can be used
- History of Robotics

Unmanned system: any electro-mechanical system which has the capability to carry out a prescribed task or portion of a prescribed task automatically, without human intervention.
Unmanned vehicle: a vehicle that does not contain a person.- Can be tele-operated- Can be autonomous - Typically deploys a payload
Remotely Operated Vehicles (ROVs)
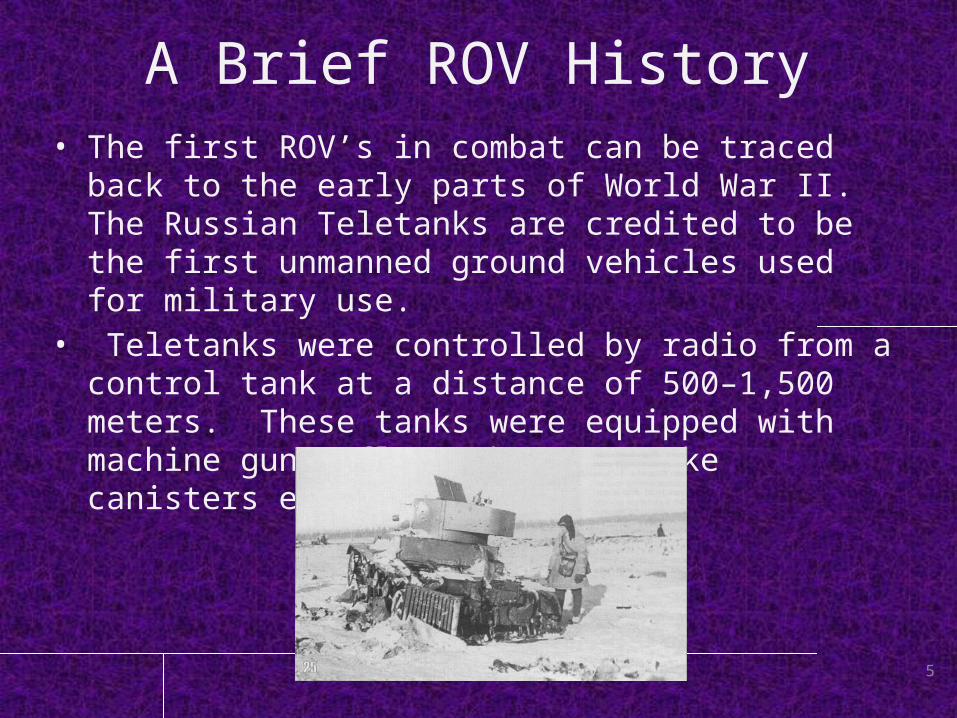
• The first ROV’s in combat can be traced back to the early parts of World War II. The Russian Teletanks are credited to be the first unmanned ground vehicles used for military use.
• Teletanks were controlled by radio from a control tank at a distance of 500–1,500 meters. These tanks were equipped with machine guns, flame throws, smoke canisters etc…
5
A Brief ROV History

Autonomous vs Non-autonomous
Autonomous robots• not operated by humans• can work in unknown environments• may use algorithms derived from
artificial intelligenceNon-autonomous robots• tele-operated by a human operator• if not operated, may have an a-priori
behavior programmed Ground Robotic Systems

ROVs (cont.)
• Unmanned vehicles can come in several flavors: UxV–Land: UGV–Air: UAV–Maritime: UUV, USV–Sensors: UGS (Seismic, Magnetic, and Acoustic)

8
TALON is a man-portable robot that weighs less than 100 lbs. It is operated with a joystick that has 7 speed settings and can use its treads to climb stairs, maneuver through rubble and even snow. All TALON’s are equipped with chemical, gas, temperature and radiation sensors. Also configured to operate with M240 or M249 machine guns or Barrett 50-cliber rifles.
Unmanned Ground Vehicle (UGV)
Talon Robot

Unmanned Aerial Vehicle (UAV)• The UAV is an acronym for Unmanned
Aerial Vehicle, which is an aircraft with no pilot on board. UAVs can be remote controlled aircraft (e.g. flown by a pilot at a ground control station) or can fly autonomously. UAVs are currently used for a number of missions, including reconnaissance and attack roles.
• The RQ-11 Raven Small Unmanned Aircraft System is a small man-portable UAV that performs reconnaissance, surveillance, and target acquisition missions for Air Force security forces.
Raven Video

Unmanned Underwater Vehicle(UUV)
• A Remotely Operated Vehicle (ROV) is essentially an underwater robot that allows the vehicle’s operator to remain in a comfortable environment while the ROV works in the hazardous environment below.
• The Seaeye Falcon DR was introduced in 2006 following a number of successful operations conducted by Chris Bryant . Subsea Vision's requirement was to penetrate 1600 metres into a pipe line running 600 metres down a mountain side in a hydroelectric scheme.
Seaeye Falcon Video

Unattended Ground Sensor (UGS)
• The UGS systems employ various sensor modalities including seismic, acoustic, magnetic, and pyroelectric transducers, daylight imagers and passive infrared imagers to automatically detect the presence of persons or vehicles, and transmit activity reports to a remote processing station. The systems are packaged for concealed emplacement in the field and for long-duration unattended operation.Unattended Ground
Sensor Network

• All UxVs have common elements: –Mechanical components (drive,
power, chassis)–Electronics–Sensing/mission payloads–Communication systems–Control– Interface to user
Related Documents











