10011101011 11011011010 00110011101 10110110100 10010001011 11110010001 01101111010 for(i=0;i<100;i++) { if(xx==yy) { answer=aa+bb+cc; } } 1+2=3 E=mC 2 1001000101 11110010001 01101111 YU-CHENG CHANG YU-CHENG CHANG INTERDISCIPLINARY PORTFOLIO INTERDISCIPLINARY PORTFOLIO

Interdisciplinary Portfolio
Mar 16, 2016
As a fresh graduate, I have equipped myself with solid professional knowledge in electrical engineering combined with interdisciplinary studies in industrial design. My academic background has been further strengthened through internship and government sponsored programs…etc., which qualifies me for any entry-level job in industrial design requiring software applications or related disciplines. I am ready to take on any challenges in association with that and passionate to pursuit a successful career in the future.
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

10011101011110110110100011001110110110110100100100010111111001000101101111010
for(i=0;i<100;i++){ if(xx==yy) { answer=aa+bb+cc; }}
1+2=
3
E=mC2
100100010111110010001
01101111
YU-CHENG CHANG YU-CHENG CHANG
INTERDISCIPLINARY PORTFOLIO INTERDISCIPLINARY PORTFOLIO

Yu-Cheng Chang
Education2010/09-2012/07 M. Sc. , Graduate Institute of Automation and Control National Taiwan University of Science and Technology (NTUST), Taipei, Taiwan
2006/09-2010/06 B. Sc. , Department of Electrical Engineering National University of Kaohsiung (NUK), Kaohsiung, Taiwan
Experience2012/08 Cultural Creative Design Workshop 2012/01-2012/06 Visiting Scholar - University of British Columbia, Canada 2011/06-2011/07 2011 Taiwan-Malaysia Youth Ambassador Exchange Program 2010/04-2012/01 Teaching Assistance 2006/09-2010/06 Activities department member of the student association 2006/09-2010/06 Web art Designer and the work-study student of Department
Honors• 2009 Practical Project Contest, Department of Electrical Engineering, NUK – The Third Place• 2008 Practical Project and Students’ Study Achievements Contest, Department of Electrical Engineering, NUK – Masterpiece• 2007 the best students of Institute of Technology, NUK - Service Award• 2004 Student art competitions of Tainan city, Graphic design - The First Place
求學經歷
碩士 2010/09 - 2012/07 國立台灣科技大學 自動及控制研究所
學士 2006/09 - 2010/06 國立高雄大學 電機工程學系
經歷
民國一百年度外交部國際青年大使 – 馬來西亞團隊2011/06-2011/07
教育部學海築夢海外專業實習計劃2012/01-2012/06
台灣科技大學創意設計中心「跨國文化創意工作坊」 2012/08
國立高雄大學電機工程學系 – 系學會活動部成員2006/09-2010/06
國立高雄大學電機工程學系 – 系辦公室與網站美工工讀生2006/09-2010/06
課程教學助理2010/04-2012/01
獲獎紀錄
國立高雄大學工學院優秀學生 – 服務類2007
台南市學生美術比賽平面設計類高中普通組 - 第一名2004
國立高雄大學電機系「電機實務創意競賽」暨「學生學習成果競賽」–佳作2008
國立高雄大學電機系「電機實務專題競賽」 – 第三名2009

ContentsProduct design
旺旺便利店
點字雪餅包裝
旺仔鏢
透˙滑鼠
Under Sea 地下人行道
02
07
09
Metal design
囍˙和合如意
心馨相映
11
12
Master research
Homecare Robot14
Commercial design
2011 Taiwan Youth Ambassadors
2010 國立高雄大學畢業紀念冊 電機系A班
1W
PO
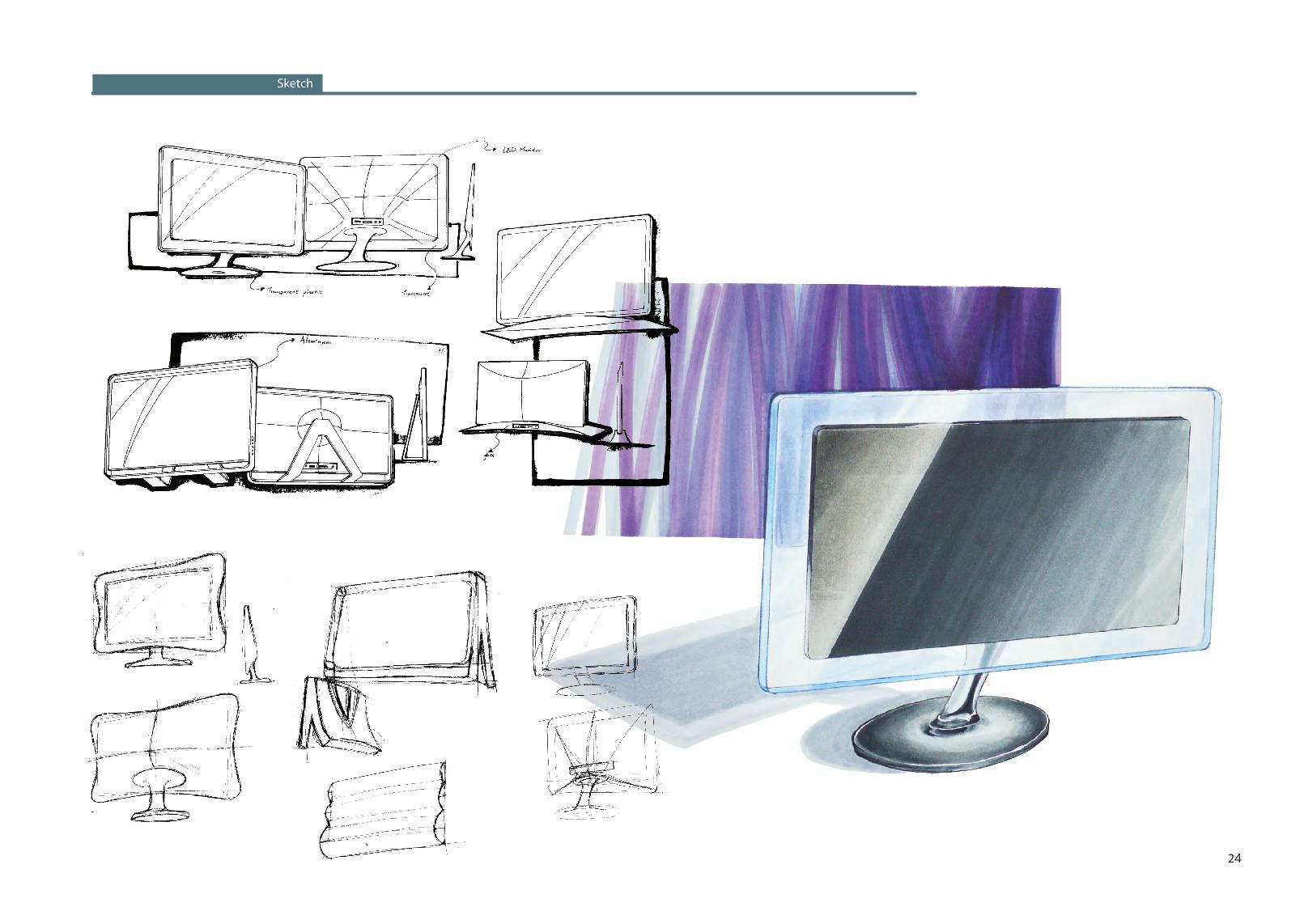
Design sketch
Product Design Sketch23

PRODUCTDESIGN

Want Want, many Chinese people’s childhood memory, is one of the largest food manu-facturer in Taiwan and mainland China. Today, they own more than 40 sub-brands and 100 factories. They even branched out to categories like medical, agricultural, hotel and real-estates. Unfortunately, all these categories are starting to dilute their brand image.
One way to strengthen their core value is to connect their branches in a seamless way. Want Want started their company in 1962 making canned food and rice crackers. Since rice is just a segment of our food culture, it is the best place to start promoting the con-tinuum of our lives. Let people discover the beauty and timeless simplicity of our roots. In order to make this food culture available and acceptable to more people, a cultural con-venience store can achieve the above requirements. By o�ering basic ingredients like wheat, rice, beans, tea and soup.
THE CONTINUUM OF LIFEdiscover the beauty of our roots and the timeless simplicity of our daily life
LOHASINTIMATESERVICE
HOLISTICALLYCONSISTENT
IRREPLACEABLE SPONTANEOUSENGAGEMENT
共同設計:張雨錚、Amethy Iam、王宇欣、邱琦、蘇天雲
CULTURAL CREATIVE DESUGN WORKSHOPPRODUCT DESIGN
2
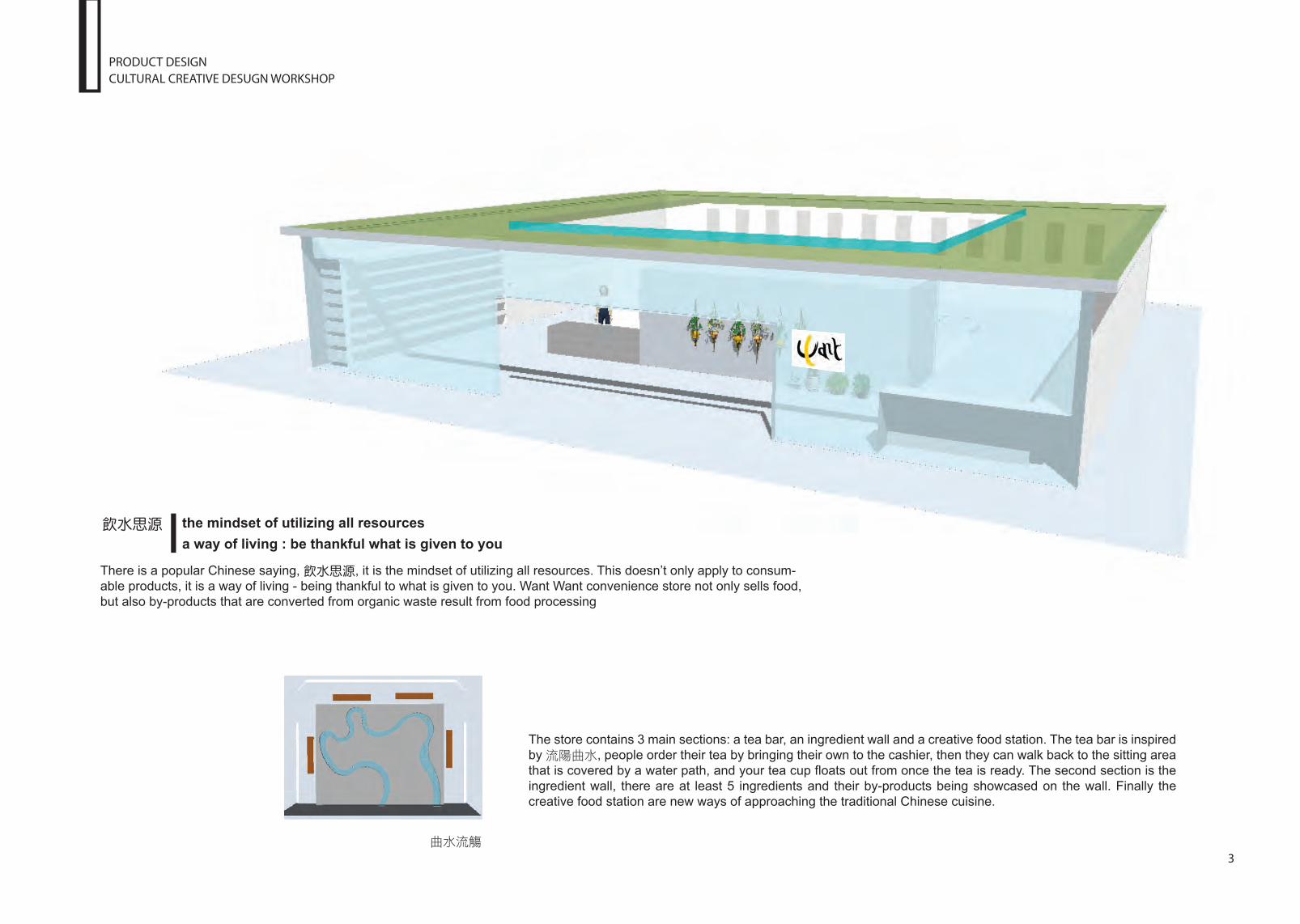
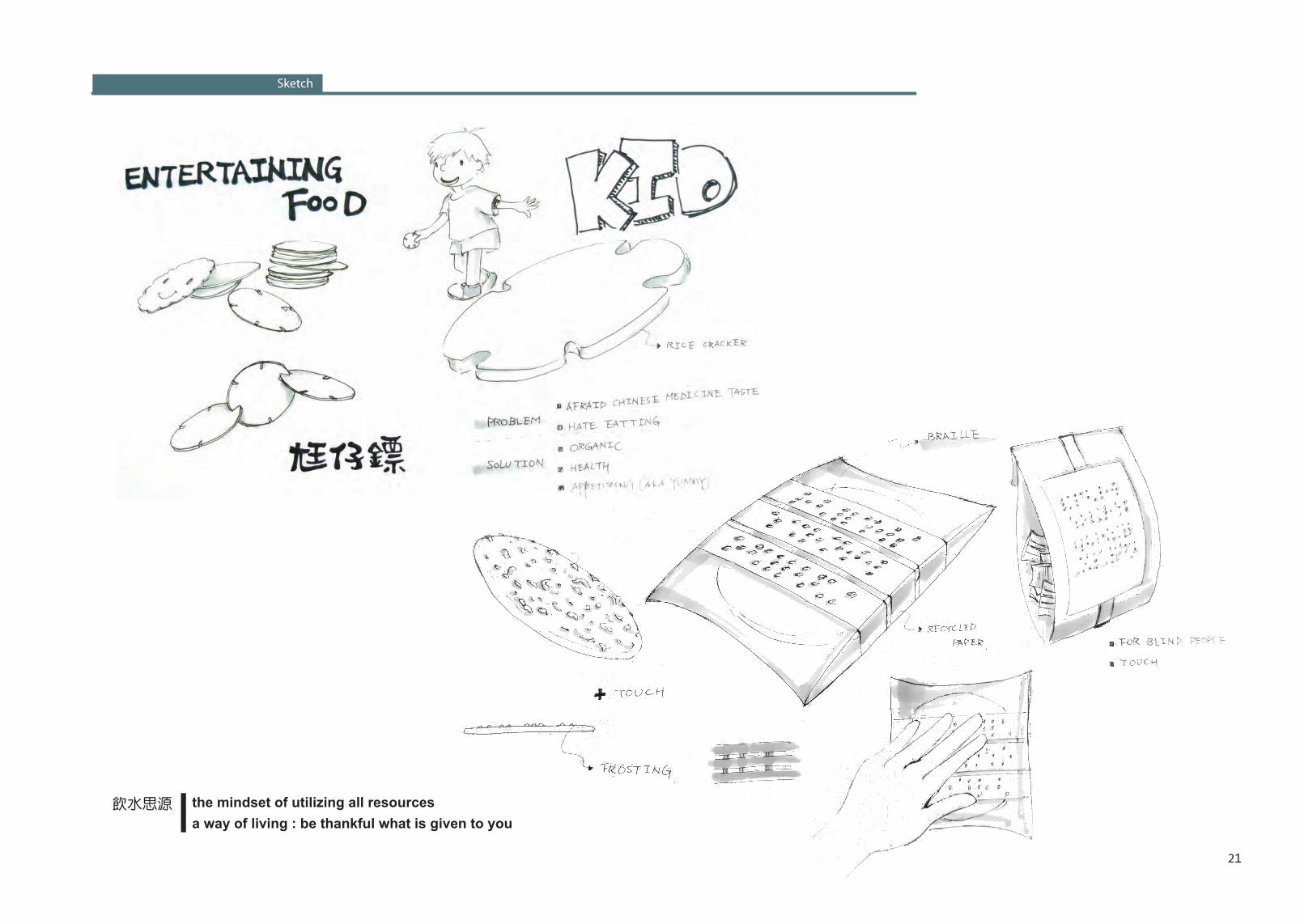
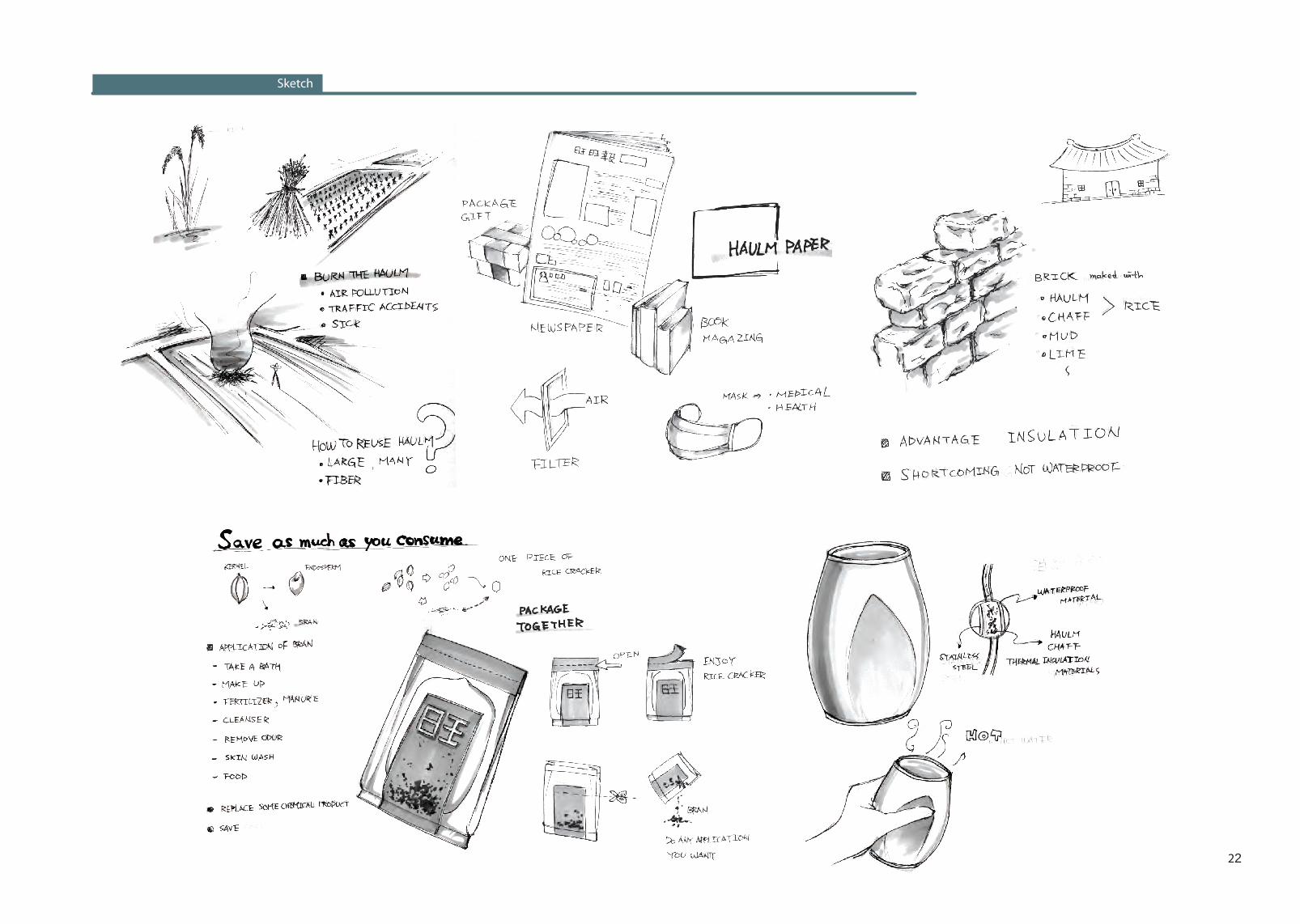
飲水思源 the mindset of utilizing all resourcesa way of living : be thankful what is given to you
There is a popular Chinese saying, 飲水思源, it is the mindset of utilizing all resources. This doesn’t only apply to consum-able products, it is a way of living - being thankful to what is given to you. Want Want convenience store not only sells food, but also by-products that are converted from organic waste result from food processing
CULTURAL CREATIVE DESUGN WORKSHOPPRODUCT DESIGN
曲水流觴
The store contains 3 main sections: a tea bar, an ingredient wall and a creative food station. The tea bar is inspired by 流陽曲水, people order their tea by bringing their own to the cashier, then they can walk back to the sitting area that is covered by a water path, and your tea cup floats out from once the tea is ready. The second section is the ingredient wall, there are at least 5 ingredients and their by-products being showcased on the wall. Finally the creative food station are new ways of approaching the traditional Chinese cuisine.
3

健康飲旺盒
旺旺雪餅 旺仔鏢
24節氣餅
金紙
CULTURAL CREATIVE DESUGN WORKSHOPPRODUCT DESIGN
工作貢獻:
主要負責設計:旺旺雪餅、旺仔鏢
材質發想:金紙
PRODUCT
4

旺旺雪餅
CONCEPT不規則的糖霜落在米餅上,除了味覺的享受外,
雪餅還帶給人令一種觸覺得感官,讓旺旺的品牌
形象能夠跳脫傳統視覺圖像的框架,藉由觸覺深
入消費者的心中。企業對於人的關懷不僅對於一
般消費大眾,更關懷視障朋友,讓視障朋友能藉
由手的觸摸發現新的旺旺,感受到旺旺對他們的
重視與關心。
將“旺旺雪餅”的點字置於包裝封面,便於視
障朋友觸摸,了解其正要食用的產品。
以米餅的原料白米為發想,以米袋的造型為外
包裝作設計。
CULTURAL CREATIVE DESUGN WORKSHOPPRODUCT DESIGN
5
CONCEPT
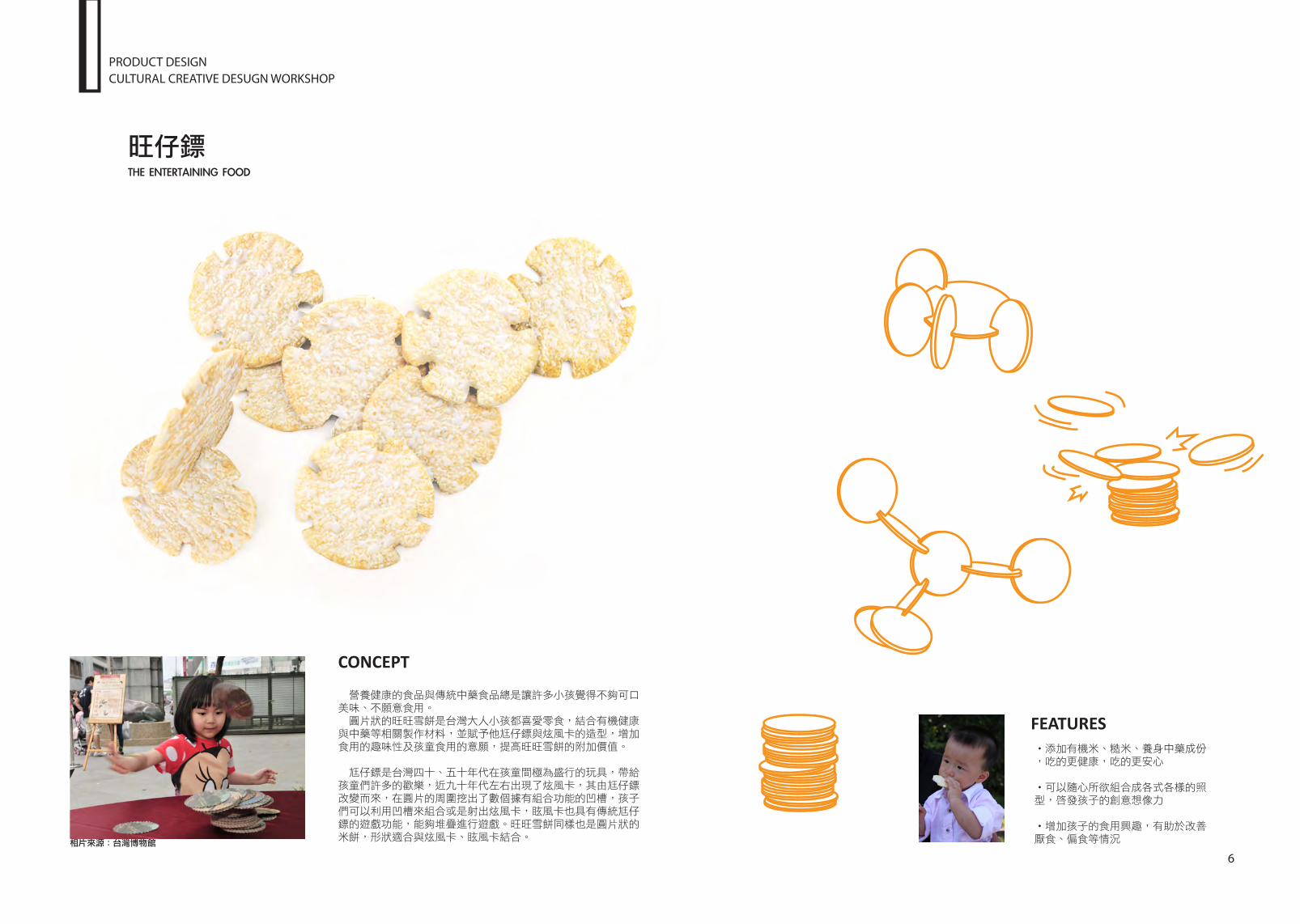
營養健康的食品與傳統中藥食品總是讓許多小孩覺得不夠可口美味、不願意食用。圓片狀的旺旺雪餅是台灣大人小孩都喜愛零食,結合有機健康與中藥等相關製作材料,並賦予他尪仔鏢與炫風卡的造型,增加食用的趣味性及孩童食用的意願,提高旺旺雪餅的附加價值。
尪仔鏢是台灣四十、五十年代在孩童間極為盛行的玩具,帶給孩童們許多的歡樂,近九十年代左右出現了炫風卡,其由尪仔鏢改變而來,在圓片的周圍挖出了數個據有組合功能的凹槽,孩子們可以利用凹槽來組合或是射出炫風卡,眩風卡也具有傳統尪仔鏢的遊戲功能,能夠堆疊進行遊戲。旺旺雪餅同樣也是圓片狀的米餅,形狀適合與炫風卡、眩風卡結合。
旺仔鏢THE ENTERTAINING FOOD
相片來源:台灣博物館
FEATURES˙添加有機米、糙米、養身中藥成份,吃的更健康,吃的更安心
˙可以隨心所欲組合成各式各樣的照型,啓發孩子的創意想像力
˙增加孩子的食用興趣,有助於改善厭食、偏食等情況
CULTURAL CREATIVE DESUGN WORKSHOPPRODUCT DESIGN
6
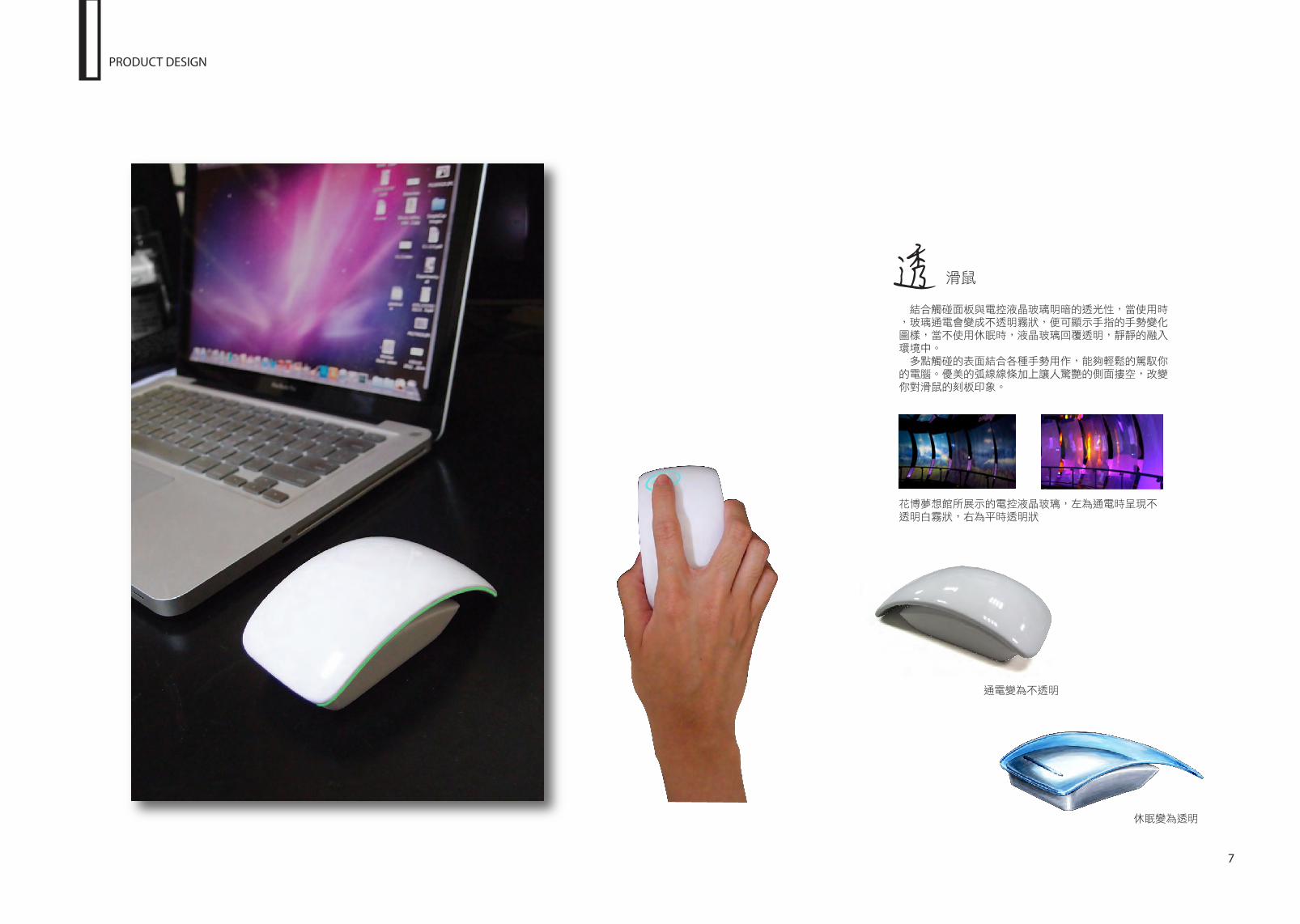
結合觸碰面板與電控液晶玻璃明暗的透光性,當使用時,玻璃通電會變成不透明霧狀,便可顯示手指的手勢變化圖樣,當不使用休眠時,液晶玻璃回覆透明,靜靜的融入環境中。多點觸碰的表面結合各種手勢用作,能夠輕鬆的駕馭你的電腦。優美的弧線線條加上讓人驚艷的側面摟空,改變你對滑鼠的刻板印象。
通電變為不透明
休眠變為透明
透 滑鼠
花博夢想館所展示的電控液晶玻璃,左為通電時呈現不透明白霧狀,右為平時透明狀
PRODUCT DESIGN
7

潔白塑料與竹紋表面又是另一番感覺,搭配不同的風格、不同的心情而有不同的選擇。
透 滑鼠
8
PRODUCT DESIGN

城市的街道間有著許多的地下道,提供行人穿越車水馬龍的
路口。這些坐立於城市各個角落的人行地下道總因為長期缺
乏重視,給行人陰暗、危險、麻煩與枯燥等感覺,寧選擇穿
越馬路也不願意走地下行人道。
假如地下人行道變成一個奇幻的海地世界隧道呢?
Under Sea 地下人行道
互動設計
走進地下道,彷彿就直接近入了美麗的海底世界,地
下道不在陰暗溼冷,不在枯燥乏味,讓民眾想要走入
行人地下道,讓路程不在只是一種過程,而是另一種
美麗的旅程。
當行人將手舉起時,附近的魚會游靠近他,像是
潛水員餵食的情況。
有時,頭頂也會冒出驚喜的魚兒跟行人互動,
利用體感裝置與電腦視覺等方法來
檢測行人的動作與環境變換。
9

METALDESIGN

囍- 和合如意
囍—通常用來表示結婚之喜,取其喜事成雙之意,在新人結婚時各式的禮物、用品都會貼上一個囍字來表示祝福的意思。和合如意亦是比喻夫妻和協、鱼水相得之意,取其”盒“與”和“同音,將新婚賀禮設計為雙盒,一方取較剛毅的線條代表男方,另一方取柔美的曲線線條代表女方,當雙盒並排放置時,便可拼出”囍“字,送上對心人最誠摯的祝福。
材料:
紅銅、黃銅琺琅玻璃
METAL DESIGN
11

材質:紅銅、琺琅
心相映心心相映、永結同心是對美味新人的祝福,
一次親友的結婚喜訊有了契機設計這款雙心吊飾贈與新人,以柔和線條
與粉色色調代表女方,俐落幾何與藍色調代表男方,希望兩人能夠互相
體貼對方的心,攜手走向未來。
12
METAL DESIGN

MASTERRESEARCH

居家機器人
In recent years, the Aging population problem become more and more important. Technical aids are required allowing people to live indepen-dently and supported in their private homes as long as they wish. Many researches propose that using the mobile robots system to provide daily service and help people for difficult and inconvenience work.
In order to execute the assignments, mobile robots are asked to become automatic and intelligent. The basic missions of the homecare system are like to delivering the medicine and moving to the fall-down elder.
For the mobile robot system, the visual servo can be the eye of the robot. There are more informa-tion can be given by the camera not only the color image data but also the depth information.
This thesis aimed to apply the visual servo system with the mobile robot for the homecare system to help everyday life of the elderly and disabled people. We design a visual servo control based mobile robotic control system (P3DX), which is able to traverse through arbitrary obstacles (Chair etc.), find and hit all unhidden and hidden in the robot testing area, and finally transmit information to a PC that will graphically display the robot’s telemetry information and ground layout. To solve these problems, this study has to achieve following objectives such as map building and identify obstacles and targets, path planning and motion control, navigate/Collect information within obstacle, trav-erse a closed path within obstacle, transmit information using transceivers, process and display received data, and find the red and blue balloon and burst it.
University of British Columbia共同合作 & 碩士論文研究
14

居家機器人
University of British Columbia共同合作 & 碩士論文研究
Global path planning
Capture Depth map and Color
frame
Reconstruct Camera and Robot Pose
Hidden target searching
Global visual server
Hidden target 3D position
Camera and Robot current pose
Local path
Global Path
Hidden target position
Motion control
Global and Local path integration
Robot current pose (Global or Local)
Global Pose
Global Pose
Wide-Angle Ceiling Camera
Kinect Localization
Local path planning
3D Environment modeling Path and Map Integration
This system includes the global (ceiling) part and the local (Kinect) part. For the global part, the ceiling camera take the global image and the computer need to find out the global target coordi-nate, obstacles position and the save robot path. Because of that the hidden target can’t be seen by the ceiling camera, the Kinect was added to search it as the local part. Kinect camera can search the local target which can’t be seen by the ceiling camera, also try to build the 3D environment model.The hidden target position is considered for the local path planning and the path integration between global and local. In Navigation motion controller, the current robot pose estimated by ceiling camera and Kinect will be integrated together for correcting the robot motion.
15
scenario
the input data from Kinect
System architecture

居家機器人
University of British Columbia共同合作 & 碩士論文研究
In this thesis scenario, the robot will follow the global designed path and searching the hidden target and remapping the path to arrive the hidden target’s position. The real scene shows in left, there are several white obstacles and three red unhidden targets. Noticing that a big white table as the obstacle where the hidden target (blue balloon) is locate. Global-path figure (right) shows up the designed global path for the visible part which is the following path of the naviga-tion system. The local-path figure shows the local designed path of the whole scenario. The robot will first follow the designed global path. The path following part also considers the error correction. Each section of the designed path will be separated in three small sections and the robot current pose will be used at each small section to modify the motion control. Beside the error correction, the local vision system will also search the hidden target. Once the hidden target is captured by Kinect, the hidden target position will be considered in to the global map and recalculate the path for arriving the hidden target position. The robot will back to follow the global path after finishing the local mission.
Real scenario
Local path
16
Global path
居家機器人
University of British Columbia共同合作 & 碩士論文研究
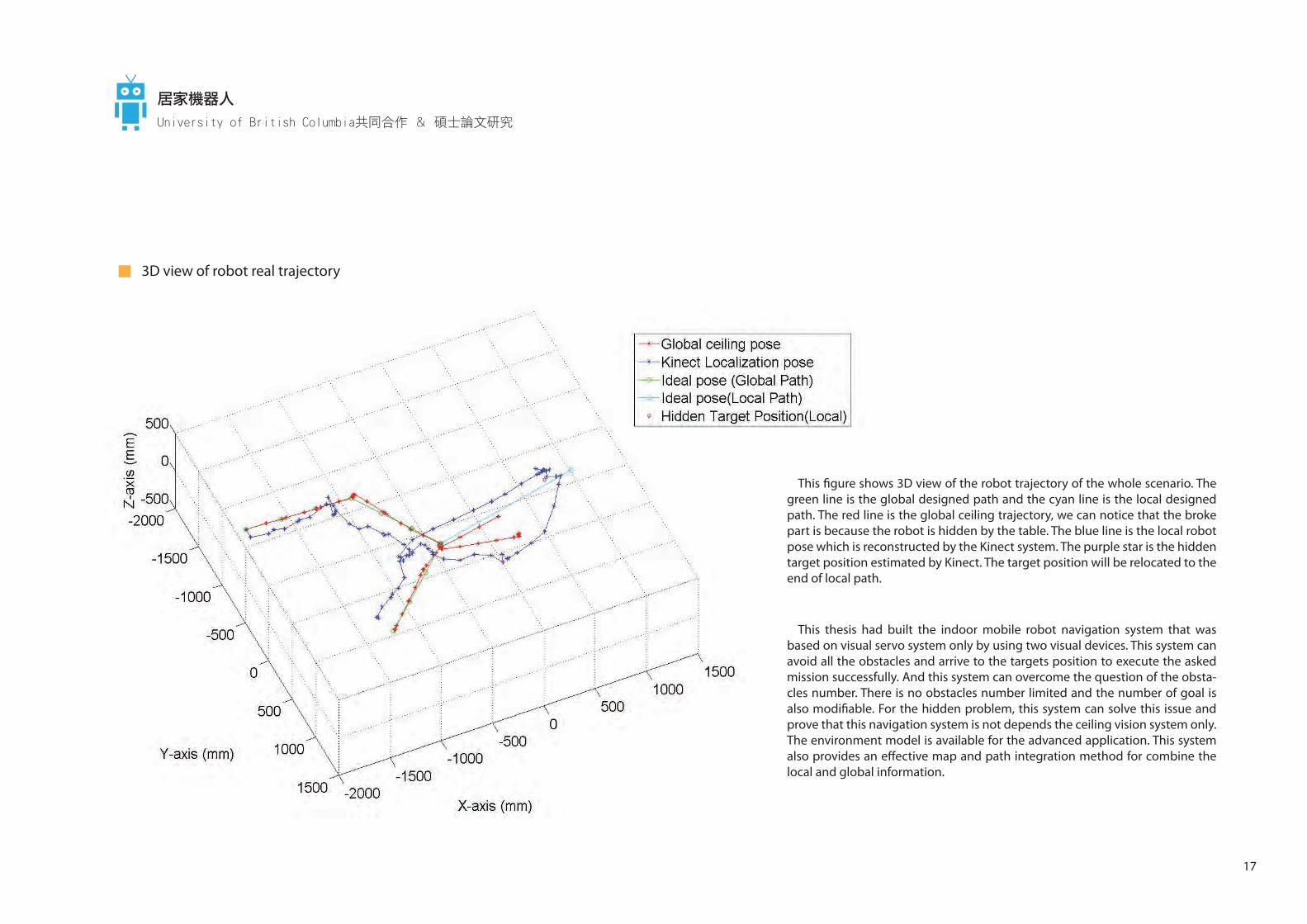
This �gure shows 3D view of the robot trajectory of the whole scenario. The green line is the global designed path and the cyan line is the local designed path. The red line is the global ceiling trajectory, we can notice that the broke part is because the robot is hidden by the table. The blue line is the local robot pose which is reconstructed by the Kinect system. The purple star is the hidden target position estimated by Kinect. The target position will be relocated to the end of local path.
This thesis had built the indoor mobile robot navigation system that was based on visual servo system only by using two visual devices. This system can avoid all the obstacles and arrive to the targets position to execute the asked mission successfully. And this system can overcome the question of the obsta-cles number. There is no obstacles number limited and the number of goal is also modi�able. For the hidden problem, this system can solve this issue and prove that this navigation system is not depends the ceiling vision system only. The environment model is available for the advanced application. This system also provides an e�ective map and path integration method for combine the local and global information.
3D view of robot real trajectory
17

COMMERCIALDESIGN

Commercial Design2011 Taiwan Youth Ambassadors
LOGO T-shirt 名牌
紀念鑰匙圈
2011 民國一百年 外交部國際青年大使計劃 馬來西亞團隊
團隊設計
團員名片
19

Commercial Design2011 Taiwan Youth Ambassadors
民國一百年青年大使—馬來西亞團隊紀念專刊
Commercial DesignYearbook
國立高雄大學電機工程學系
99級A班 畢業紀念冊
2009 Winter

DESIGNSKETCH
飲水思源 the mindset of utilizing all resourcesa way of living : be thankful what is given to you
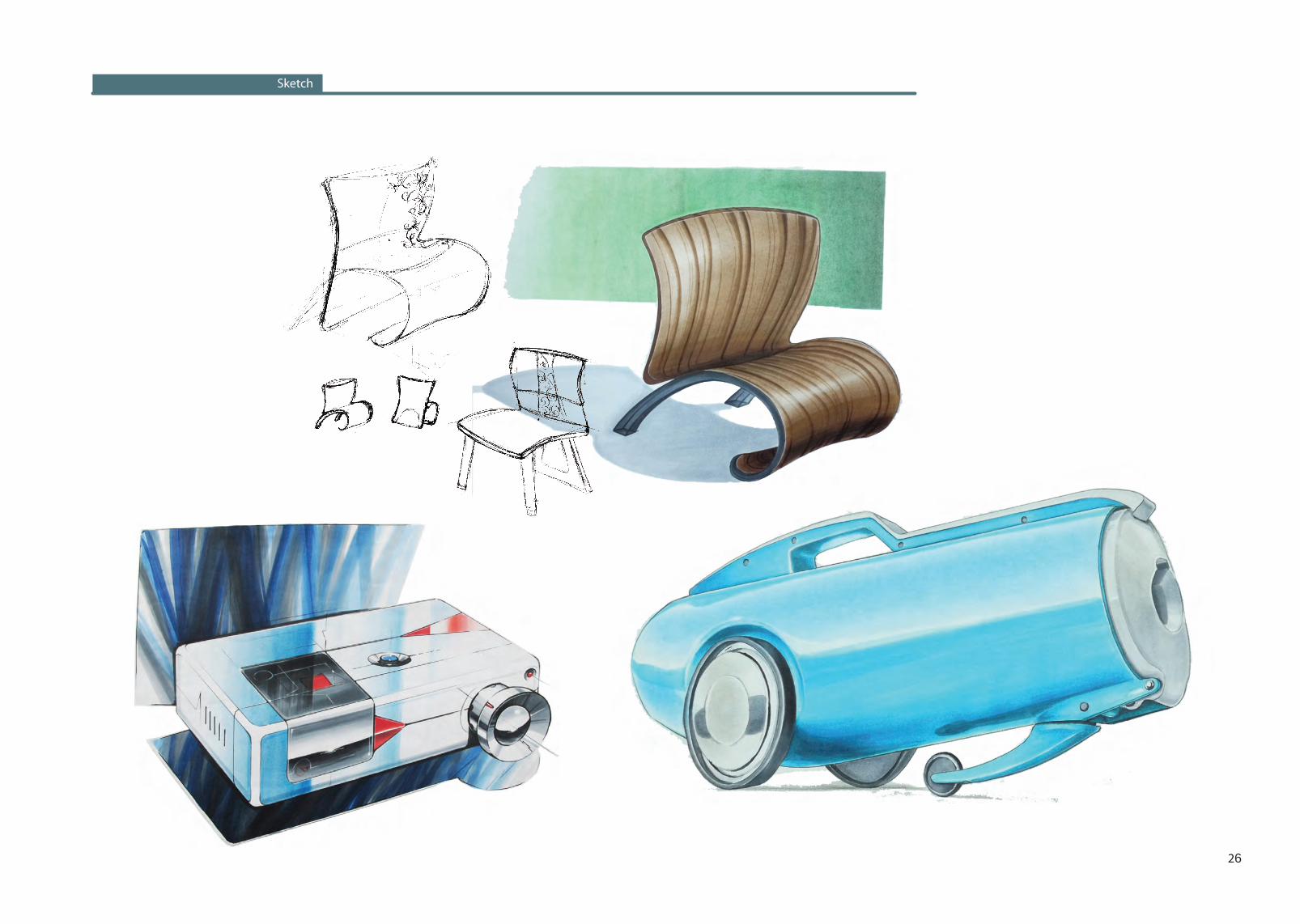
Sketch
2
Sketch
2
Sketch
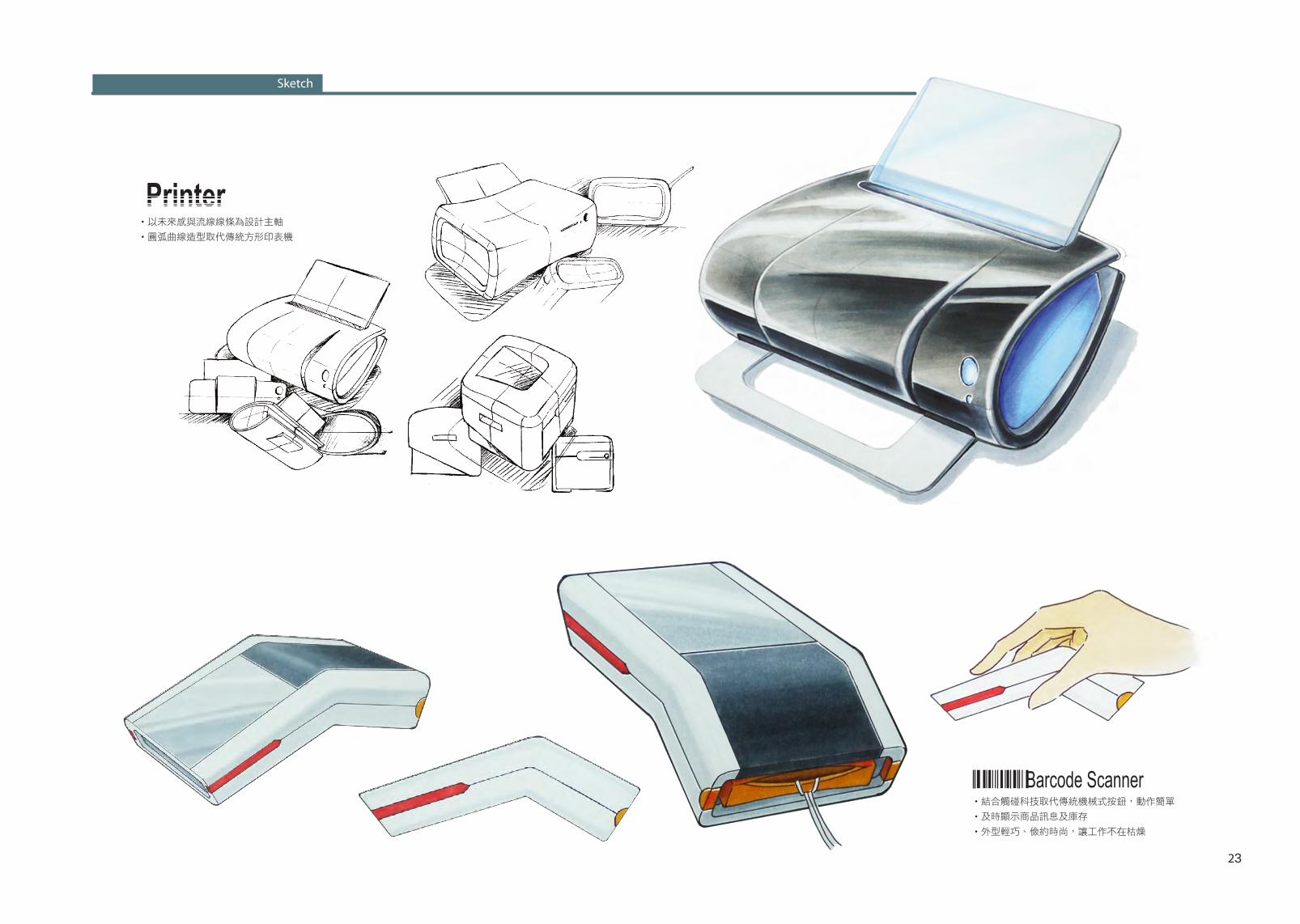
˙結合觸碰科技取代傳統機械式按鈕,動作簡單
˙及時顯示商品訊息及庫存
˙外型輕巧、儉約時尚,讓工作不在枯燥
Barcode Scanner
˙以未來感與流線線條為設計主軸
˙圓弧曲線造型取代傳統方形印表機
Printer
2
Sketch
Sketch
2

iPhone 4 爆炸圖
2
Sketch
2
Sketch

材質展現
Color Paper 系列
2
Sketch
Related Documents











