Interaction between a shock and an acceleration wave in a perfect gas for increasing shock strength Andrea Mentrelli a , Tommaso Ruggeri a, * , Masaru Sugiyama b , Nanrong Zhao b a Research Center of Applied Mathematics (CIRAM), University of Bologna, Italy b Graduate School of Engineering, Nagoya Institute of Technology, Japan Received 5 June 2007; received in revised form 24 September 2007; accepted 27 September 2007 Available online 6 October 2007 Abstract We study the interaction between a shock and an acceleration wave in an Euler fluid satisfying the ideal gas law, following the general theory developed by Boillat and Ruggeri [G. Boillat, T. Ruggeri, Reflection and transmission of dis- continuity waves through a shock wave. General theory including also the case of characteristic shocks, Proc. Roy. Soc. Edinburgh 83A (1979) 17–24]. Special attention is devoted to analyzing the effects of varying the shock strength on the jump in the shock acceleration and on the amplitudes of the reflected and/or transmitted waves, for both weak and strong shock conditions. Our analysis confirms that, for a weak shock, the jump in the shock acceleration vanishes only when the incident wave belongs to the same family as the shock. Numerical calculations have also been performed and the numerical results are in perfect agreement with those obtained by application of the theory. Moreover, the numerical results, at var- iance with the theory, allow to gather information about the evolution of the solution after the impact time. Ó 2007 Elsevier B.V. All rights reserved. Keywords: Shock waves; Discontinuity waves; Wave interaction; Euler fluid; Ideal gas law 1. Introduction Shocks and rarefaction waves are commonly encountered when investigating the solutions of nonlinear hyperbolic systems; their study has received much attention in the last decades [1]. For example, in the one-dimensional case, a widely studied problem in hyperbolic system theory and applications, the so-called Riemann problem, involves the development of shocks and rarefaction waves, as well as their interaction. Discontinuity waves, also known in Continuum Mechanics as acceleration waves, are another important kind of solution of nonlinear hyperbolic systems. They are characterized by a discontinuity in the normal derivative of the field but not in the field itself. The study of the interaction between shocks and discontinuity waves was first approached by Jeffrey [2]; later, the elastic case was studied by Brun [3]. The first comprehen- 0165-2125/$ - see front matter Ó 2007 Elsevier B.V. All rights reserved. doi:10.1016/j.wavemoti.2007.09.005 * Corresponding author. Tel.: +39 0512093973; fax: +39 051582528. E-mail addresses: [email protected] (A. Mentrelli), [email protected] (T. Ruggeri), [email protected] (M. Sugiyama), [email protected] (N. Zhao). Available online at www.sciencedirect.com Wave Motion 45 (2008) 498–517 www.elsevier.com/locate/wavemoti

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Available online at www.sciencedirect.com
Wave Motion 45 (2008) 498–517
www.elsevier.com/locate/wavemoti
Interaction between a shock and an acceleration wavein a perfect gas for increasing shock strength
Andrea Mentrelli a, Tommaso Ruggeri a,*, Masaru Sugiyama b, Nanrong Zhao b
a Research Center of Applied Mathematics (CIRAM), University of Bologna, Italyb Graduate School of Engineering, Nagoya Institute of Technology, Japan
Received 5 June 2007; received in revised form 24 September 2007; accepted 27 September 2007Available online 6 October 2007
Abstract
We study the interaction between a shock and an acceleration wave in an Euler fluid satisfying the ideal gas law,following the general theory developed by Boillat and Ruggeri [G. Boillat, T. Ruggeri, Reflection and transmission of dis-continuity waves through a shock wave. General theory including also the case of characteristic shocks, Proc. Roy. Soc.Edinburgh 83A (1979) 17–24]. Special attention is devoted to analyzing the effects of varying the shock strength on thejump in the shock acceleration and on the amplitudes of the reflected and/or transmitted waves, for both weak and strongshock conditions. Our analysis confirms that, for a weak shock, the jump in the shock acceleration vanishes only when theincident wave belongs to the same family as the shock. Numerical calculations have also been performed and the numericalresults are in perfect agreement with those obtained by application of the theory. Moreover, the numerical results, at var-iance with the theory, allow to gather information about the evolution of the solution after the impact time.� 2007 Elsevier B.V. All rights reserved.
Keywords: Shock waves; Discontinuity waves; Wave interaction; Euler fluid; Ideal gas law
1. Introduction
Shocks and rarefaction waves are commonly encountered when investigating the solutions of nonlinearhyperbolic systems; their study has received much attention in the last decades [1]. For example, in theone-dimensional case, a widely studied problem in hyperbolic system theory and applications, the so-calledRiemann problem, involves the development of shocks and rarefaction waves, as well as their interaction.
Discontinuity waves, also known in Continuum Mechanics as acceleration waves, are another importantkind of solution of nonlinear hyperbolic systems. They are characterized by a discontinuity in the normalderivative of the field but not in the field itself. The study of the interaction between shocks and discontinuitywaves was first approached by Jeffrey [2]; later, the elastic case was studied by Brun [3]. The first comprehen-
0165-2125/$ - see front matter � 2007 Elsevier B.V. All rights reserved.doi:10.1016/j.wavemoti.2007.09.005
* Corresponding author. Tel.: +39 0512093973; fax: +39 051582528.E-mail addresses: [email protected] (A. Mentrelli), [email protected] (T. Ruggeri), [email protected] (M. Sugiyama),
[email protected] (N. Zhao).

A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 499
sive study including the case of characteristic shock and a weak shock analysis was performed by Boillat andRuggeri [4], who also proved that the interaction between a shock SðkÞ and a discontinuity wave DðiÞ has animportant feature: when the shock and the incident wave belong to different families (i.e. when k 5 i) theinteraction shows a typical nonlinear behavior, and the jump in the shock acceleration due to the interactiondoes not vanish even for a weak shock. Interestingly enough, this result has something in common with theone regarding the interaction between shocks and rarefaction waves: the case of interaction between wavesbelonging to the same family is qualitatively different from the one of waves belonging to different families[5,6]. The theory developed in [4] has been applied, since its development, in various different fields [7–15].
In gas dynamics the system of Euler equations is widely used, since it represents the conservation laws ofmass, momentum and energy for a perfect fluid, i.e. a fluid with neither viscosity nor heat conductivity. Thissystem of equations is hyperbolic and a great deal of attention has been dedicated to the study of its solutions.Nevertheless, even for this important system of equations, there is a lack in the understanding of the effects ofthe interaction between shock and acceleration waves; to the authors’ knowledge, the only papers devoted tothis problem, those by Ruggeri [11] and by Pandey and Sharma [15], are restricted to the study of the inter-action between an acceleration wave and only the characteristic shock for the cases, respectively, of an idealgas and a van der Waals gas.
The aim of this paper is to apply the theory developed in [4] to the case of a one-dimensional ideal gas sat-isfying the Euler equations, in order to achieve a detailed comprehension of the consequences of the interac-tion process between shock and acceleration waves in this important case. The analytical results obtained byapplying the theory allow to investigate the effects of varying the strength of the shock (i.e. the Mach numberfor the noncharacteristic shocks and the ratio between the densities ahead and behind the shock for the char-acteristic shock) on the consequences of the interaction process, that is on the amplitudes of the reflected and/or transmitted waves and on the jump in acceleration experienced by the shock. Our results clarify the roleplayed by the nonlinearity: the reflection/transmission effects, which are typical of the nonlinear problems,turn out to be of primary importance. Moreover, a striking effect of the nonlinearity is appreciable in the caseof interaction between a shock SðkÞ and a discontinuity wave DðiÞ not belonging to the same family (i.e. k 5 i).In this circumstance, in fact, our results show that the jump in the shock acceleration due to the impact is – asexpected – not vanishing, even in the case of a weak shock, i.e. when the strength of shock vanishes.
Numerical simulations have also been performed by means of a code previously developed by two of thepresent authors [16]. The numerical results turn out to be perfectly consistent with the theory; a selection willbe presented, together with a discussion of the analytical results. In addition to testing the results coming fromthe application of the theory, the numerical approach allows to gain information about the evolution of thesolution in time.
The plan of the paper is the following. In Section 2 we write down the system of Euler equations and intro-duce the nomenclature used in the following. In Section 3 we briefly recall when a hyperbolic system admits ashock wave solution (Section 3.1), as well as the theory of acceleration waves (Section 3.2). We also brieflyrecall the general theory of the interaction between shock and acceleration waves developed in [4] (Section3.3), with special attention to the case of the Euler fluid. In Section 4, a brief description of the numericalscheme adopted for the numerical experiments is given. In Section 5, we present the detailed study of the var-ious kind of interactions between shock and acceleration waves in the perfect gas, with emphasis on the case ofan ideal monatomic gas. The analytical results coming from the application of the theory are presentedtogether with some results of numerical simulations. Finally, in Section 6, we briefly summarize our mainresults.
2. The system of Euler equations
In the one-dimensional case, the system of Euler equations, describing the conservation of mass, momen-tum and energy in a fluid without viscosity nor heat conductivity, takes the form
ut þ FxðuÞ ¼ 0; ð1Þ
where the subscripts denote partial differentiation, u � u(x, t) is the vector of the conserved quantities, andF � F(u) is the vector of the fluxes:

500 A. Mentrelli et al. / Wave Motion 45 (2008) 498–517
u �q
qv
E
0B@
1CA; F �
qv
qv2 þ p
ðE þ pÞv
0B@
1CA; ð2Þ
being q the mass density, v the velocity, E the total energy density (E ¼ qeþ 12qv2, where e is the specific inter-
nal energy), p the pressure. The equation of state usually given to close the system is, for an ideal gas:
p ¼ km
qT ; e ¼ pqðc� 1Þ ; ð3Þ
where c represents the ratio of specific heats, T is the absolute temperature, k and m are, respectively, theBoltzmann’s constant and the molecular mass of the gas.
The system (1) and (2) may also be written in the quasi-linear form as follows:
ut þ Aux ¼ 0; ð4Þ
where A is the Jacobian matrix of the flux (A = $F) and, for an ideal gas,
A �0 1 0
ðc� 3Þ v2
2ð3� cÞv c� 1
ðc� 2Þ v3
2� vc2
c�132� c
� �v2 þ c2
c�1cv
0B@
1CA ð5Þ
with
c ¼ffiffiffiffiffiffic
pq
r¼
ffiffiffiffiffiffiffiffiffiffiffic
km
T
r
the sound velocity. The eigenvalues of A represent the characteristic velocities of the system. They are given by
kð1Þ ¼ v� c; kð2Þ ¼ v; kð3Þ ¼ vþ c; ð6Þ
the corresponding right eigenvectors are
dð1Þ ¼1
v� cv2
2þ c2
c�1� cv
0B@
1CA; dð2Þ ¼
1
vv2
2
0B@
1CA; dð3Þ ¼
1
vþ cv2
2þ c2
c�1þ cv
0B@
1CA: ð7Þ
3. Shock waves, acceleration waves and their interaction in the Euler fluid
3.1. Shock waves and Rankine–Hugoniot condition
As is well known, a system of equations written in the form (1) admits a shock wave solution if across thewave front C, given by the equation /(x, t) = 0, the Rankine–Hugoniot condition is satisfied:
�s½u� þ ½FðuÞ� ¼ 0; ð8Þ
where s is the speed of propagation of the wave front C and [g] represents the jump in the general quantity g
across C, i.e.
½g� ¼ g1 � g0; g0 ¼ lim/ ! 0þ
g; g1 ¼ lim/ ! 0�
g:
In this context we usually call g0 the unperturbed field and g1 the perturbed field, because they represent, respec-tively, the field g ahead and behind the propagating shock front.
For the Euler equations, the Rankine–Hugoniot condition reads
�s q½ � þ qv½ � ¼ 0; �s qv½ � þ qv2 þ p� �
¼ 0; �s qeþ 1
2qv2
� �þ qeþ 1
2qv2 þ p
v
� �¼ 0: ð9Þ

A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 501
Introducing the unperturbed Mach number M0 = (s � v0)/c0, we find a one-parameter family of solutions of(9), with M0 the parameter:
q1 ¼ q0
cþ 1ð ÞM20
2þ c� 1ð ÞM20
; v1 ¼ v0 þ c0
2 M20 � 1
� �cþ 1ð ÞM0
; p1 ¼ p0
1þ c 2M20 � 1
� �1þ c
: ð10Þ
It is worthwhile recalling that a shock wave traveling with velocity s and satisfying the Rankine–Hugoniotcondition is a physically relevant solution if the Lax condition holds, i.e. if there is an integer k (1 6 k 6 N,being N the order of the system) such that:
kðkÞ0 < s < kðkÞ1 ; ð11Þ
where kðkÞ0 ¼ kðkÞðu0Þ, kðkÞ1 ¼ kðkÞðu1Þ and where the eigenvalues are sorted in the following way:k(1) < k(2) < . . . < k(N), under the additional assumption of absence of multiple eigenvalues. A shock wave trav-eling with velocity s satisfying (11) is called a k–shock, and denoted by SðkÞ.In the case of the Euler system of equations, it turns out that Sð1Þ is a physically acceptable solution when-ever M0 < �1 (that is, for shock velocity s < v0 � c0) and Sð3Þ is acceptable whenever M0 > 1 (that is, fors > v0 + c0).
Besides (10), another solution of (9) exist: it is the so-called characteristic shock, Sð2Þ, corresponding to:
½q� arbitrary; v1 ¼ v0 ¼ s; p1 ¼ p0: ð12Þ
To simplify our notation, from now on the perturbed field u1 will be simply denoted by u.3.2. Acceleration waves
For a generic quasi-linear hyperbolic system of conservation laws written in the form (4), it is possible toconsider a particular class of solutions called discontinuity waves or acceleration waves [17,18]. A discontinuitywave is characterized by a moving surface, given by the Cartesian equation u(x, t) = 0, across which the field uis continuous but a discontinuity in the normal derivative of u exists, i.e.
½u� ¼ 0; ½uu� ¼ P 6¼ 0: ð13Þ
The velocity V ¼ � utjruj of the wave is equal to a characteristic velocity, k(i), evaluated in the state u* on the
wavefront, and the jump P is proportional to the eigenvector d(i), corresponding to the eigenvalue k(i), eval-uated in the same state
V ¼ kðiÞ� ¼ kðiÞðu�Þ; P ¼ PdðiÞ� ; dðiÞ� ¼ dðiÞðu�Þ: ð14Þ
The acceleration wave traveling with the characteristic velocity kðiÞ� will be denoted by the symbol DðiÞ; itsamplitude P satisfies a Bernoulli equation along the characteristic line:
dPdtþ aðtÞP2 þ bðtÞP ¼ 0; ð15Þ
where d/dt indicates the time derivative along the characteristic, and a(t) and b(t) are given in [18].For the case of an acceleration wave propagating in a constant equilibrium state, it is possible toprove that
½ux� ¼ ½uu�; ½ut� ¼ �kðiÞ� ½uu�; aðtÞ ¼ rkðiÞ � dðiÞ� �
�¼ const:; bðtÞ ¼ 0: ð16Þ
Therefore, in this case the solution of (15) is
PðtÞ ¼ Pð0Þ1þPð0Þat
; ð17Þ
where P(0) is the amplitude at t = 0, i.e. P(0) = P(0).

502 A. Mentrelli et al. / Wave Motion 45 (2008) 498–517
If the wave DðiÞ is genuinely nonlinear, i.e. ($k(i) Æ d(i))* 5 0, there is in general a critical time, scr, suchthat the denominator of (17) vanishes and the discontinuity becomes unbounded. The critical time, givenby
scr ¼ �1
Pð0Þa; ð18Þ
corresponds in general to the onset of a strong discontinuity (shock wave), because the field u itself presents adiscontinuity across the wave front.
In the case of the Euler system of equations, from (16)1, (13)2, (14)2 and (7)1 we have, for the wave Dð1Þ,
½ux�ð1Þ �
qx½ �ð1Þ
qvð Þx� �ð1Þ
qeþ 12qv2
� �x
h ið1Þ
0BBB@
1CCCA ¼ Pð1Þ
1
v� cv2
2þ c2
c�1� cv
0B@
1CA�
;
and it is easily seen that
½qx�ð1Þ ¼ Pð1Þ; Gð1Þ ¼ ½vt�ð1Þ ¼ �kð1Þ� ½vx�ð1Þ ¼
cðv� cÞq
�Pð1Þ; ð19Þ
where G(1) represents the jump in acceleration associated to the wave Dð1Þ. In the same way, it is easy to findthat, for the wave Dð3Þ
½qx�ð3Þ ¼ Pð3Þ; Gð3Þ ¼ ½vt�ð3Þ ¼ �kð3Þ� ½vx�ð3Þ ¼ �
cðvþ cÞq
�Pð3Þ: ð20Þ
As to the wave Dð2Þ, we have
½ux�ð2Þ �½qx�
ð2Þ
½ðqvÞx�ð2Þ
½ qeþ 12qv2
� �x�ð2Þ
0BB@
1CCA ¼ Pð2Þ
1
vv2
2
0B@
1CA�
;
from which it is readily obtained
½qx�ð2Þ ¼ Pð2Þ ð21Þ
and we can easily conclude that the only discontinuity carried by the contact wave Dð2Þ is the one in the normalderivative of the density. This is therefore the only quantity useful for describing the contact wave Dð2Þ.
Taking into account that P(i) coincides with [qx](i) (i = 1,2,3), from now on we will always indicate theamplitude of the wave DðiÞ with [qx](i) instead of P(i).
In the case of the Euler system of equations, it is also possible to see that
for Dð1Þ a ¼ rkð1Þ � dð1Þ� �
�¼ � cþ 1
2
cq
�< 0; scr ¼
2q�½qx�
ð1Þð0Þðcþ 1Þc�
;
for Dð2Þ a ¼ rkð2Þ � dð2Þ� �
�¼ 0; scr ¼ 1;
for Dð3Þ a ¼ rkð3Þ � dð3Þ� �
�¼ cþ 1
2
cq
�> 0; scr ¼ �
2q�½qx�
ð3Þð0Þ cþ 1ð Þc�
;
and thus the critical time is a positive quantity if ½qx�ð1Þð0Þ > 0 for the acceleration wave Dð1Þ, if ½qx�
ð3Þð0Þ < 0 for the
acceleration wave Dð3Þ. The acceleration wave Dð2Þ has no critical time, since ½qx�ð2Þ ¼ ½qx�
ð2Þð0Þ ¼ const: The val-
ues of ½qx�ðiÞð0Þ giving a positive critical time correspond to compression waves DðiÞ, while the values of ½qx�
ðiÞð0Þ giv-
ing negative scr are associated with expansion waves DðiÞ.

A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 503
3.3. Interaction between a shock wave and an acceleration wave
According to the theory developed in [4], when a shock and an acceleration wave interact, the latter is par-tially transmitted and partially reflected across the shock front C, thus generating reflected and transmittedacceleration waves. The interaction has an effect also on the propagation of the shock, being responsiblefor a jump in its acceleration. Letting s* be the impact time, the theory provides the number of transmittedand reflected waves, as well as their amplitude at t = s* and the jump in the acceleration of the shock,s_st :¼ _ssþ�
� _ss�� .Extending the calculations presented in [4], where only the first of the two following cases was discussed, we
have to distinguish:Case I: k P i ðInteraction SðkÞ ! DðiÞÞ. In this case (k � 1) transmitted waves ðDð1Þ;Dð2Þ; . . . ;Dðk�1ÞÞ are
generated, together with (N � k) reflected waves ðDðkþ1Þ;Dðkþ2Þ; . . . ;DðNÞÞ. The amplitudes a(1),a(2), . . . ,a(k�1)
of the transmitted waves, the amplitudes bðkþ1Þ0 ; bðkþ2Þ
0 ; . . . ; bðNÞ0 of the reflected ones and the jump in the shockacceleration s_st (all quantities being calculated at t = s*) are given by the algebraic system of N equations:
Fig. 1.drawinsketchvelocit
TableInterac
Case
ABCDE
s_st½u� þXk�1
j¼1
aðjÞ s� kðjÞ� �2
dðjÞ �XN
j¼kþ1
bðjÞ0 s� kðjÞ0
� �2
dðjÞ0 ¼ PðiÞ0 s� kðiÞ0
� �2
dðiÞ0 ; ð22Þ
where PðiÞ0 represents the amplitude at t = s* of the incident discontinuity wave DðiÞ.Case II: i P k ðInteraction DðiÞ ! SðkÞÞ. In this case, (k � 1) reflected waves ðDð1Þ;Dð2Þ; . . . ;Dðk�1ÞÞ and
(N � k) transmitted waves ðDðkþ1Þ;Dðkþ2Þ; . . . ;DðNÞÞ are generated. The algebraic system of N equations withthe N unknown quantities bð1Þ; . . . ; bðk�1Þ; aðkþ1Þ; . . . ; aðNÞ; s_st (all calculated at t = s*) is the following:
(Left) Sketch of the one-dimensional propagation of SðkÞ and DðiÞ and representation of the interaction in the x � t plane. Forg purpose, without loss of generality, the velocities of SðkÞ and DðiÞ are supposed to be positive and negative, respectively; (right)of the one-dimensional propagation of DðiÞ and SðkÞ and representation of the interaction in the x � t plane. In this case both theies of DðiÞ and SðkÞ are supposed to be positive.
1tion patterns between shock and acceleration waves in the one-dimensional Euler fluid
Interaction patterns Acceleration waves after interaction
Sð3Þ ! Dð1Þ equivalent to Dð3Þ ! Sð1Þ Two transmitted wavesDð3Þ ! Sð3Þ equivalent to Dð1Þ ! Sð1Þ Two reflected wavesSð3Þ ! Dð2Þ equivalent to Dð2Þ ! Sð1Þ Two transmitted wavesDð3Þ ! Sð2Þ equivalent to Sð2Þ ! Dð1Þ One transmitted wave, one reflected waveSð3Þ ! Dð3Þ equivalent to Sð1Þ ! Dð1Þ Two transmitted waves

504 A. Mentrelli et al. / Wave Motion 45 (2008) 498–517
s_st½u� þXk�1
j¼1
bðjÞ s� kðjÞ� �2
dðjÞ �XN
j¼kþ1
aðjÞ0 s� kðjÞ0
� �2
dðjÞ0 ¼ �PðiÞ s� kðiÞ
� �2
dðiÞ: ð23Þ
Both previous cases are sketched in Fig. 1. In the one-dimensional Euler fluid, governed by Eqs. (1) and (2), wehave N = 3; five different interaction patterns exist, all belonging to either Case I or Case II, summed up inTable 1.
It is important to recall that the linear systems (22) and (23) are Cramer’s systems and it has been provedthat, at least for weak shocks, they are always nonsingular [4].
4. Numerical scheme
Numerical solutions of the Euler system of Eqs. (1) and (2) have been calculated with a general-purposecode solving hyperbolic systems of N nonlinear balance laws. The algorithm that was employed for the cal-culations presented here is a slightly modified version of the Uniformly accurate Central Scheme of order 2(UCS2), belonging to the central scheme family, developed by Liotta, Romano and Russo [20] and usedfor the first time in [16]. The UCS2 scheme makes use of a two-predictor stage at each time step. At the(n + 1)th time step, the evaluation of the solution is performed on a computational grid that is staggered withrespect to the one employed in the previous nth time step. In the case of a system of conservation laws, as thepresent case, the scheme reads as follows:
unþ1jþ1=2 ¼ �un
jþ1=2 � m F unþ1=2jþ1 ; xjþ1
� �� F u
nþ1=2j ; xj
� �h i;
where unþ1jþ1=2 represents the vector of the solution evaluated at the (j + 1/2) node (of coordinate xj+1/2) of the
staggered grid at the (n + 1)th time step; �unjþ1=2 is the vector of the staggered cell average of the solution at the
nth time step; unþ1=2j and u
nþ1=3j are the predictors; m = Dt/Dx is the mesh ratio with Dt and Dx being the time
step and the size of the spatial grid, respectively. In the previous expression, �unjþ1=2 is given by
�unjþ1=2 ¼
1
2un
j þ unjþ1
� �þ 1
8u0j � u0jþ1
� �
and the predictors unþ1=pj (p = 2,3) are obtained implicitly as follows
unþ1=pj ¼ un
j �mp
f 0j:
The space derivatives u0j=Dx and f 0j=Dx are evaluated with the Uniform Nonoscillatory (UNO) scheme, as sug-gested in [20]:
Djþ12u ¼ MM ujþ2 � 2ujþ1 þ uj; ujþ1 � 2uj þ uj�1
� �;
u0j ¼ MM ujþ1 � uj �1
2Djþ1
2u; uj � uj�1 þ
1
2Dj�1
2u
with MM the minmod function defined by [21]:
MMða; bÞ ¼sgnðaÞminðjaj; jbjÞ; if sgnðaÞ ¼ sgnðbÞ;0; if sgnðaÞ 6¼ sgnðbÞ:
5. Analysis of the interaction process for increasing mach number
In this section a thorough analysis of the interaction between shock and acceleration waves in the Eulerfluid will be presented for each of the five possible cases summed up in Table 1, focusing attention on thefirst interaction of each couple of equivalent interaction patterns listed in the table. In each case, the linearsystem resulting from Eqs. (22) and (23) is solved and a detailed analysis is performed, comprising a dis-cussion of the effects of the strength of the shock (i.e. of the Mach number M0 for cases A, B, C, E andof the parameter r = q/q0 for case D) on the jump in the shock acceleration and on the amplitudes of the

A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 505
transmitted/reflected waves. Details on the analytical procedure are given only for Case A, being the othercases studied in a similar way. For all the cases, particular attention is given to the analysis of the weak shock
and strong shock conditions, obtained, respectively, when M0! 1 and M0!1 (or, respectively, when r! 1and r!1 for Case D). For the sake of simplicity, the velocity v0 of the unperturbed field u0 ahead of theshock is assumed in the following, without loss of generality, to be null, i.e. u0 � (q0,v0 = 0,q0e0).
The analytical results are tested by numerical experiments; a selection of the results coming from simula-tions are presented. In all numerical experiments, the constant unperturbed state is defined by u0 �(q0 = 1,v0 = 0,E0 = 0.9) and the perfect gas is assumed to be monatomic (c = 5/3).
Even if it is quite difficult to validate by means of numerical simulation the results provided by the analyt-ical theory for an instantaneous quantity such as the jump in the shock acceleration, s_st, some useful infor-mation are provided by the numerical experiments. In fact, it is possible to see that, if a shock is accelerating,then its acceleration cannot change sign [19]. In fact, on differentiating with respect to time the Rankine–Hugoniot equation (8), we obtain
�_s½u� þ ðA� sIÞ½ _u� ¼ 0:
Taking into account Lax condition (11), and excluding that all the components of the field u be stationary (i.e.supposing ½ _u� ¼ _u 6¼ 0), we see that the acceleration _s cannot vanish (thus, it cannot change sign). We also ob-serve that, if the shock has a constant velocity before the impact ð_ss�� ¼ 0Þ, then s_st ¼ _ssþ�
, and conclude thatthe sign of s_st can be obtained just by knowing the sign of the shock acceleration after the impact. The lattercan be obtained by comparing the position of the shock at a chosen time t (t > s*) with the position it wouldhave if no interaction occurred and it traveled with _s ¼ 0. A similar conclusion can be drawn for a shock trav-eling with constant velocity after the impact.
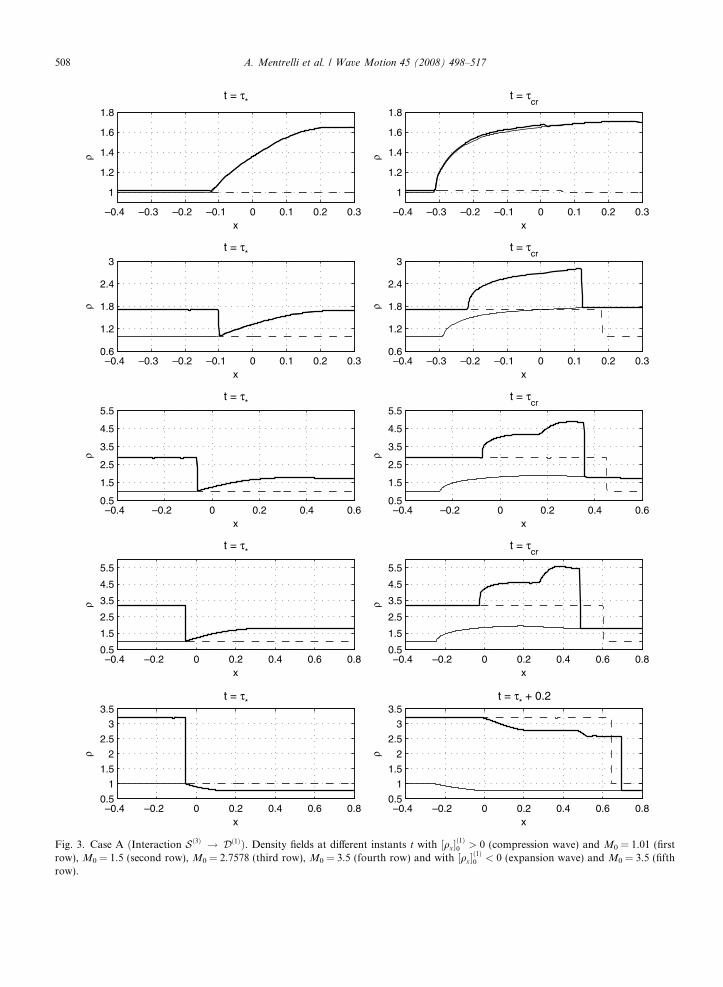
In order to put into evidence the effects of the interaction between shock and acceleration waves, the sim-ulation results are presented in the following fashion. For each case, the density profiles are shown at theimpact time s* and at the critical time scr that the acceleration wave would have in the absence of an interac-tion (if the incident acceleration wave is a compression wave) or at some time after the impact time (if theacceleration wave is an expansion wave and no critical time exists). At each time, the density profiles (thicklines in all figures) are shown together with the corresponding profiles obtained for the shock alone (thindashed lines) and for the acceleration wave alone (thin continuous line). The superposition of the three profilesallows to observe the effects of the interaction process on the propagation of the shock and of the transmitted/reflected waves, as well as the effects on the critical time (if there is one) of the fastest acceleration wave (ingeneral, that time is different from the corresponding critical time scr that the incident wave would have with-out interaction).
5.1. Case A: Interaction Sð3Þ ! Dð1Þ
In the case of an interaction between a shock Sð3Þ and an acceleration wave Dð1Þ, equivalent to the interac-tion between an acceleration wave Dð3Þ and a shock Sð1Þ, two transmitted waves (Dð1Þ and Dð2Þ) are generated atthe impact time t = s*. Eq. (22), taking into account (19) and (21), looks as follows:
s_st½u� þ ½qx�ð1Þ s� kð1Þ� �2
dð1Þ þ ½qx�ð2Þ s� kð2Þ� �2
dð2Þ ¼ ½qx�ð1Þ0 s� kð1Þ0
� �2
dð1Þ0 : ð24Þ
The linear system (24), once the quantities q0; v0; e0; ½qx�ð1Þ0 are given, can be easily solved and the unknown
quantities s_st, [qx](1), [qx](2) are obtained as explicit functions of the Mach number M0.In order to analyze the effects of the Mach number on the propagation of the fastest transmitted wave, the
jump in the acceleration associated to this wave, G(1), already defined in (19)2, is introduced. As a last step, allthe unknown quantities are replaced by suitable dimensionless ones:
s_st ! s_st
Gð1Þ0
; Gð1Þ ! Gð1Þ
Gð1Þ0
; ½qx�ð1Þ ! ½qx�
ð1Þ
½qx�ð1Þ0
; ½qx�ð2Þ ! ½qx�
ð2Þ
½qx�ð1Þ0
;
where ½qx�ð1Þ0 and Gð1Þ0 are, respectively, the jump in the derivative of the density and the jump in the acceler-
ation associated to the incident wave. These dimensionless quantities turn out to be quite complicated func-

506 A. Mentrelli et al. / Wave Motion 45 (2008) 498–517
tions of M0 and are not reported here. In the case of a monatomic gas (c = 5/3), they considerably simplifyand look as follows:
Fig. 2.M0 for
s_st
Gð1Þ0
¼ � 1þM0ð Þ 3 1þ lð Þ þM0 M0 10þM0 8þ 3M0ð Þ � 3lð Þ � 4l� 8ð Þð Þ3 M0 � 1ð Þ 1þ 3M2
0 þ l� � ;
Gð1Þ
Gð1Þ0
¼1þM0ð Þ4 3M0 � 1ð Þ 3� 3M2
0 þ l� �
2M0 1þ 3M20 þ l
� �2;
½qx�ð1Þ
½qx�ð1Þ0
¼ 32M30 1þM0ð Þ4 3M0 � 1ð Þ
3þM20
� �1þ 3M2
0 þ l� �2
l;
½qx�ð2Þ
½qx�ð1Þ0
¼128M3
0 M0 � 1ð Þ 1þM0ð Þ3 3M0 þM30 � l
� �3þM2
0
� �31þ 3M2
0 þ l� �
l;
ð25Þ
where l ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi5M4
0 þ 14M20 � 3
q.
It is interesting to observe that in this case the Cramer’s system (24) is nonsingular for every value of M0,not just for weak shocks (M0 � 1) as guaranteed by the theory. The behavior of quantities (25) as functions ofM0 is shown in Fig. 2.
In order to discuss the effects of varying the Mach number M0 on the transmitted waves and on the jump inthe acceleration of the shock, it is interesting to analyze the situations of weak and strong incident shocks. Theformer situation is encountered when M0! 1 (or z! 0, with z = M0 � 1), the latter when M0!1.
Weak shock (M0! 1). In this situation it is easy to find, for a generic c:
Case A ðInteraction Sð3Þ ! Dð1ÞÞ. Dependence of (a) s_st=Gð1Þ0 ; (b) Gð1Þ=Gð1Þ0 ; (c) ½qx�ð1Þ=½qx�
ð1Þ0 ; (d) ½qx�
ð2Þ=½qx�
ð1Þ0 on the Mach number
a monatomic gas.

A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 507
s_st
Gð1Þ0
¼ 3� cþ 3�c2
� �zþO z2ð Þ; Gð1Þ
Gð1Þ0
¼ 1þ c�3cþ1
� �zþO z2ð Þ;
½qx �ð1Þ
½qx �ð1Þ0
¼ 1þ 3 3�c1þc
� �zþOðz2Þ; ½qx�ð2Þ
½qx�ð1Þ0
¼ 16 c�1cþ1
� �2
z3 þOðz4Þ:ð26Þ
This analysis reveals that the transmitted wave Dð2Þ should be quite difficult to observe, while the wave Dð1Þ istransmitted with slight alteration. It is also remarkable that the interaction between an incident wave Dð1Þ andan even very weak shock Sð3Þ generates a nontrivial discontinuity in the acceleration of the shock, as evidencedby (26)1. This striking effect of nonlinearity is in agreement with the theory presented in [4], according to whichthe jump in the acceleration of the shock is null, as z! 0, only when SðkÞ and DðiÞ belong to the same family,i.e. k = i (in the present case k = 3 and i = 1).
The effects of nonlinearity become even more evident as the Mach number M0 increases: the incident waveDð1Þ experiences an alteration in both amplitude and acceleration during its transmission through the shock,and the wave Dð2Þ (which never exists in the linear case) appears and becomes more and more important as theMach number increases.
Strong shock (M0!1). When the shock strength becomes very large, we have
limM0!1
s_st
Gð1Þ0
¼ 1; limM0!1
Gð1Þ
Gð1Þ0
¼ �1; limM0!1
½qx�ð1Þ
½qx�ð1Þ0
� 1:566; limM0!1
½qx�ð2Þ
½qx�ð1Þ0
� 10:933; ð27Þ
where (27)3,4 are obtained restricting ourselves to the case of a monatomic gas (c = 5/3). From theseresults it turns out that the jump in the shock acceleration, s_st, becomes arbitrarily large as the Machnumber M0 increases. It is also interesting to note (see Fig. 2) that ½qx�
ð1Þ=½qx�
ð1Þ0 reaches a maximum va-
lue (’2.496) for M0 ’ 3.5458 and then decreases monotonically for larger values of M0, approaching afinite value. Moreover, ½qx�
ð1Þ> ½qx�
ð1Þ0 for every Mach number M0 > 1. This means than an incident com-
pression (expansion) wave generates after the impact a compression (expansion) transmitted wave Dð1Þ,and that the strength of the latter is always greater than that of the incident wave, if we agree to mea-sure the strength of the wave DðiÞ by the absolute value of the associated quantity [qx](i). Concerning thewave Dð1Þ, a striking feature of the behavior of Gð1ÞGð1Þ0 shown in Fig. 2b is that this quantity changessign when the Mach number M0 come across the threshold value Mc
0 ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi4þ
ffiffiffiffiffi13pp
’ 2:7578 (for a mon-atomic gas). Since it is easily shown that
Gð1Þ
Gð1Þ0
¼ q0
c20
cðc� vÞq
½qx�ð1Þ
½qx�ð1Þ0
;½qx�
ð1Þ
½qx�ð1Þ0
> 0;
the quantity Gð1Þ=Gð1Þ0 changes sign when v = c, that is, when the velocity in the perturbed state equals thesound velocity and becomes (for increasing Mach number) supersonic. The strong shock analysis makes it evi-dent that also the amplitude of the wave Dð2Þ is bounded and its strength grows monotonically as the Machnumber M0 increases, approaching an asymptote as M0!1.
It is remarkable that the wave Dð2Þ, which does not exist in the linear case, becomes the predominant wavewhen the incident shock is strong, being even more important than the wave Dð1Þ, as Eqs. (27)3,4 clearly show.
In order to test the theoretical results, numerical experiments have been performed for various Mach num-bers M0, for shocks Sð3Þ impacting with both compression and expansion waves Dð1Þ. The results presented inFig. 3 show that, according to Eq. (26)1 and Fig. 2a, even for a weak shock (M0 = 1.01) the propagation of theshock is appreciably affected by the interaction. In fact, it may be easily seen comparing the density profiles(thick continuous line) to the corresponding ones obtained for a shock propagating without interaction (thindashed line) that the shock is decelerated, that is, s_st < 0. It is worth recalling here that the sign of the shockacceleration cannot change, thus allowing us to say that if the shock experiences an instantaneous decelerationat t = s* ði:e: _ssþ�
¼ s_st < 0Þ, it cannot accelerate for any t > s*. This observation is crucial since it allows us toinfer the sign of s_st by comparing the position of the shock after the interaction with the one obtained in theabsence of interaction (given by, respectively, the thick continuous line and the thin dashed line). The sameconclusion may be drawn by comparing the thick and dashed lines for the cases with Mach numbersM0 = 1.5, M0 ¼ Mc
0 ’ 2:7578 and M0 = 3.5, all shown in Fig. 3. The analysis of these numerical results allows
–0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3
1
1.2
1.4
1.6
1.8
x
ρt = τ
*
–0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3
1
1.2
1.4
1.6
1.8
x
ρ
t = τcr
–0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.30.6
1.2
1.8
2.4
3
x
ρ
t = τ*
–0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.30.6
1.2
1.8
2.4
3
xρ
t = τcr
–0.4 –0.2 0 0.2 0.4 0.60.5
1.5
2.5
3.5
4.5
5.5
x
ρ
t = τ*
–0.4 –0.2 0 0.2 0.4 0.60.5
1.5
2.5
3.5
4.5
5.5
x
ρ
t = τcr
–0.4 –0.2 0 0.2 0.4 0.6 0.80.5
1.5
2.5
3.5
4.5
5.5
x
ρ
t = τ*
–0.4 –0.2 0 0.2 0.4 0.6 0.80.5
1.5
2.5
3.5
4.5
5.5
x
ρ
t = τcr
–0.4 –0.2 0 0.2 0.4 0.6 0.80.5
1
1.5
2
2.5
3
3.5
x
ρ
t = τ*
–0.4 –0.2 0 0.2 0.4 0.6 0.80.5
1
1.5
2
2.5
3
3.5
x
ρ
t = τ* + 0.2
Fig. 3. Case A ðInteraction Sð3Þ ! Dð1ÞÞ. Density fields at different instants t with ½qx�ð1Þ0 > 0 (compression wave) and M0 = 1.01 (first
row), M0 = 1.5 (second row), M0 = 2.7578 (third row), M0 = 3.5 (fourth row) and with ½qx�ð1Þ0 < 0 (expansion wave) and M0 = 3.5 (fifth
row).
508 A. Mentrelli et al. / Wave Motion 45 (2008) 498–517
A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 509
also to see that the jump in the acceleration of the fastest transmitted wave, G(1), changes sign when the Machnumber is increased from values below the threshold value Mc
0 to values above Mc0, in accordance with Fig. 2b.
In fact, comparing the positions of the weak discontinuities and taking into account that its accelerationbefore the impact is null, it is easily seen that for M0 ¼ 1:5 < Mc
0 the fastest discontinuity wave Dð1Þ experiencesa negative acceleration (i.e. an acceleration in the direction of decreasing x), while for M0 ¼ Mc
0 the wave Dð1Þ
has no acceleration after the impact time (at least until it becomes critical) and, finally, for M0 ¼ 3:5 > Mc0 it
has a positive acceleration. Another relevant result in agreement with the analytical ones is that the transmittedwave Dð2Þ becomes more and more important as the Mach number M0 increases. Finally, it is seen in Fig. 2that when an acceleration wave traveling without interaction (thin continuous line) turns into a shock, thefastest transmitted wave Dð1Þ seems to have already become critical; this behavior suggests that the impactbetween the shock and the acceleration wave is responsible for a reduction of the critical time of the discon-tinuity wave Dð1Þ.
In the case of an expansion wave Dð1Þ, Fig. 3 shows that, accordingly with the theoretical results, the shockexperiences a positive jump in acceleration. Moreover, in this case the fastest transmitted wave is an expansionwave, while in all the cases previously discussed it was a compression wave. These results confirm the predictedones shown in Fig. 2c, according to which [qx](1) and ½qx�
ð1Þ0 have the same sign.
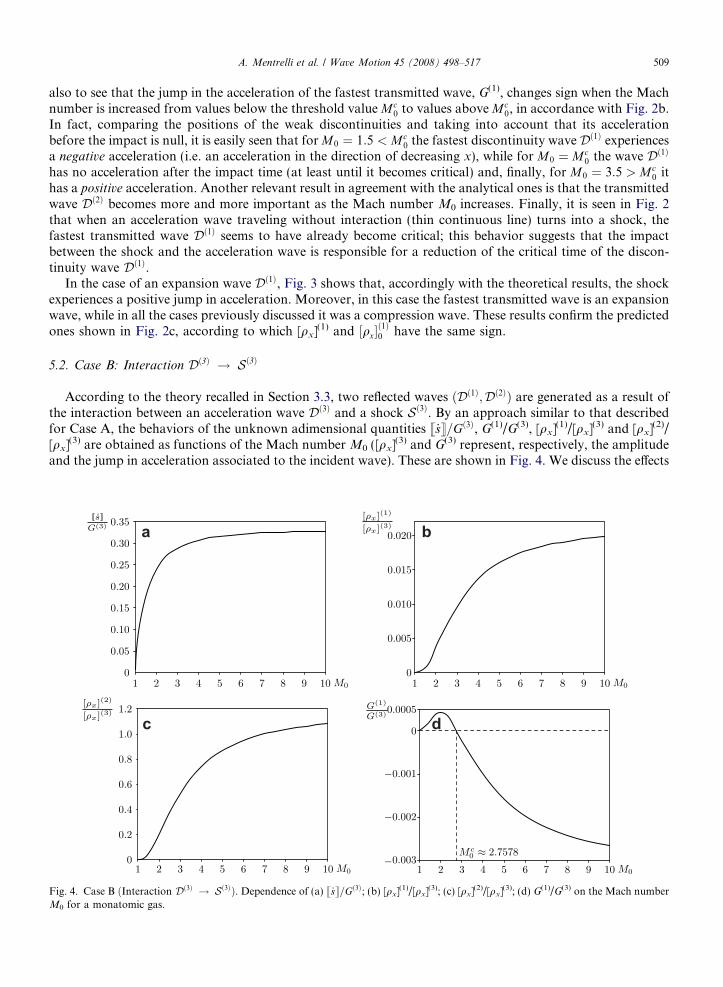
5.2. Case B: Interaction Dð3Þ ! Sð3Þ
According to the theory recalled in Section 3.3, two reflected waves ðDð1Þ;Dð2ÞÞ are generated as a result ofthe interaction between an acceleration wave Dð3Þ and a shock Sð3Þ. By an approach similar to that describedfor Case A, the behaviors of the unknown adimensional quantities s_st=Gð3Þ, G(1)/G(3), [qx](1)/[qx](3) and [qx](2)/[qx](3) are obtained as functions of the Mach number M0 ([qx](3) and G(3) represent, respectively, the amplitudeand the jump in acceleration associated to the incident wave). These are shown in Fig. 4. We discuss the effects
Fig. 4. Case B ðInteraction Dð3Þ ! Sð3ÞÞ. Dependence of (a) s_st=Gð3Þ; (b) [qx](1)/[qx](3); (c) [qx](2)/[qx](3); (d) G(1)/G(3) on the Mach numberM0 for a monatomic gas.

510 A. Mentrelli et al. / Wave Motion 45 (2008) 498–517
of the Mach number M0 on the jump in the shock acceleration and on the strength of the reflected waves per-forming an analysis of the weak and strong shock situations.
Weak shock (M0! 1). Under the weak shock assumption (z = M0 � 1! 0) we have the following results:
s_stGð3Þ¼ cþ1
4
� �zþO z2ð Þ; ½qx�ð1Þ
½qx�ð3Þ¼ 5�3c
8ð1þcÞ z3 þ 21�70cþ37c2
16 1þcð Þ2
� �z4 þO z5ð Þ;
½qx�ð2Þ
½qx�ð3Þ¼ 4 c�1
cþ1
� �z3 þO z4ð Þ; Gð1Þ
Gð3Þ¼ 5�3c
8 1þcð Þ z3 þ 37c�59
16 1þcð Þ
� �z4 þO z5ð Þ:
ð28Þ
From the analysis of (28), it emerges that both the reflected waves are nearly not observable: the incident waveis thus absorbed by the shock. Moreover, the jump in the shock acceleration is vanishing, confirming that thequantity s_st is different from zero for a SðkÞ ! DðkÞ interaction, as proven in [4].
It is worth recalling here that the shock SðkÞ and the acceleration wave DðkÞ, in the limiting case M0! 1,travel with the same velocity k(k). In this case the interaction never occurs and the impact time is thus infinite.
Strong shock (M0!1). For a strong shock, restricting ourselves to the case of a monatomic gas, we obtain
limM0 ! 1
s_st
Gð3Þ� 0:332; lim
M0 ! 1
½qx�ð1Þ
½qx�ð3Þ � 0:0213; lim
M0 ! 1
½qx�ð2Þ
½qx�ð3Þ � 1:167; lim
M0 ! 1
Gð1Þ
Gð3Þ� �0:0031: ð29Þ
It is interesting to observe that the amplitudes of the reflected waves approach finite values as the Mach num-ber increases. In particular, the strength of the wave Dð2Þ is smaller than that of the incident wave forM0 < 6.96, and for large values of M0 it remains of the same order of magnitude of the strength of the incidentwave (as seen in (29)3), while the strength of Dð1Þ is always very small when compared to the strength of theincident wave. Also the jump in acceleration associated to Dð1Þ is always very small, compared to the jump inacceleration associated to the incident wave. The quantity G(1)/G(3) exhibits a maximum (’0.000444) whenM0 ’ 1.947 and then decreases monotonically as the Mach number increases. As for the wave Dð1Þ previouslydiscussed in Case A, G(1) = 0 when M0 ¼ Mc
0 ’ 2:7578 (for c = 5/3) but, contrary to what happens in Case A,the quantity G(1)/G(3) remains bounded as M0!1.
Finally, we observe that, as stated in (29)1, the jump in the shock acceleration, s_st, is also bounded asM0!1; the quantity s_st is not affected by the shock strength, at least when the shock is sufficiently strong.
The results of numerical simulations obtained for both compression and expansion waves are presented inFig. 5. It is worth recalling that, in this case, [qx](3) < 0 represents a compression wave, while [qx](3) > 0 cor-responds to an expansion wave. Relevant validations of the theory come from these numerical results. In par-ticular, it may be seen that the fastest reflected wave has a quite small amplitude with respect to the amplitudeof the impacting wave and thus the wave Dð1Þ is difficult to observe. On the contrary, the contact wave Dð2Þ hasan amplitude of the same order of magnitude of the incident wave. Moreover, it is seen that the fastest trans-mitted wave is a compression (expansion) wave whenever the incident wave is a compression (expansion)wave. The numerical results confirm also the analytical ones shown in Fig. 4a: the shock wave is acceleratedby the impact when the acceleration wave is compressive, and is decelerated otherwise.
5.3. Case C: Interaction Sð3Þ ! Dð2Þ
In the case of interaction between a shock Sð3Þ and an acceleration wave Dð2Þ, the latter is completely trans-mitted across the shock. The analysis of the behavior of the jump in the shock acceleration and of the ampli-tudes of the transmitted waves Dð1Þ and Dð2Þ leads to the results shown in Fig. 6, for the case of a monatomicgas.
Weak shock (M0! 1). For a weak shock, we have (z = M0 � 1):
s_stc2
0
q0½qx�
ð2Þ0
¼ � 1
2� 3
4zþOðz2Þ; ½qx�
ð1Þ
½qx�ð2Þ0
¼ 1
2 1þ cð Þ zþOðz2Þ; ½qx�ð2Þ
½qx�ð2Þ0
¼ 1þ 8
1þ c
zþOðz2Þ; ð30Þ
where ½qx�ð2Þ0 is the amplitude of the incident wave. From (30)1 we notice that, as expected (see also Sections 5.1
and 5.2), the jump in the shock acceleration is not vanishing for a weak shock; nevertheless, in this case the
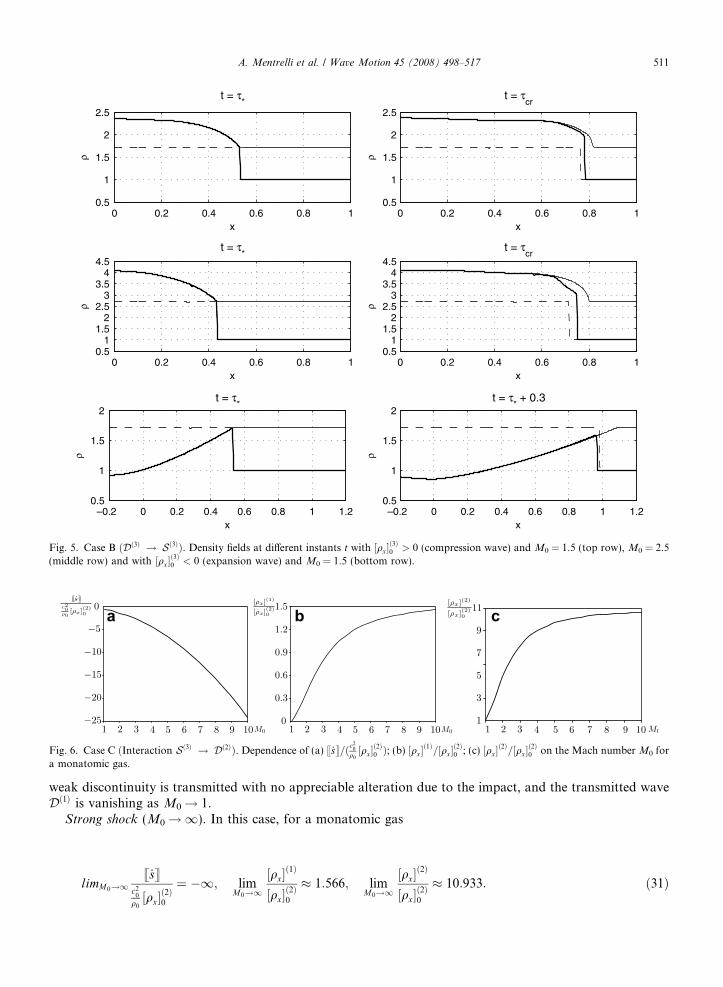
Fig. 6. Case C ðInteraction Sð3Þ ! Dð2ÞÞ. Dependence of (a) s_st=ðc20
q0½qx�
ð2Þ0 Þ; (b) ½qx�
ð1Þ=½qx�
ð2Þ0 ; (c) ½qx�
ð2Þ=½qx�
ð2Þ0 on the Mach number M0 for
a monatomic gas.
0 0.2 0.4 0.6 0.8 10.5
1
1.5
2
2.5
x
ρt = τ
*
0 0.2 0.4 0.6 0.8 10.5
1
1.5
2
2.5
x
ρ
t = τcr
0 0.2 0.4 0.6 0.8 10.5
11.5
22.5
33.5
44.5
x
ρ
t = τ*
0 0.2 0.4 0.6 0.8 10.5
11.5
22.5
33.5
44.5
xρ
t = τcr
–0.2 0 0.2 0.4 0.6 0.8 1 1.20.5
1
1.5
2
x
ρ
t = τ*
–0.2 0 0.2 0.4 0.6 0.8 1 1.20.5
1
1.5
2
x
ρ
t = τ* + 0.3
Fig. 5. Case B ðDð3Þ ! Sð3ÞÞ. Density fields at different instants t with ½qx�ð3Þ0 > 0 (compression wave) and M0 = 1.5 (top row), M0 = 2.5
(middle row) and with ½qx�ð3Þ0 < 0 (expansion wave) and M0 = 1.5 (bottom row).
A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 511
weak discontinuity is transmitted with no appreciable alteration due to the impact, and the transmitted waveDð1Þ is vanishing as M0! 1.
Strong shock (M0!1). In this case, for a monatomic gas
limM0!1s_st
c20
q0½qx�
ð2Þ0
¼ �1; limM0!1
½qx�ð1Þ
½qx�ð2Þ0
� 1:566; limM0!1
½qx�ð2Þ
½qx�ð2Þ0
� 10:933: ð31Þ

512 A. Mentrelli et al. / Wave Motion 45 (2008) 498–517
From (31)1 and from Fig. 6a we see that the shock is accelerated (decelerated) when the incident wave is char-acterized by ½qx�
ð2Þ0 < 0 ð½qx�
ð2Þ0 > 0Þ. Since, as shown in Fig. 6b, the sign of [qx](1) and ½qx�
ð2Þ0 are the same, and a
negative [qx](1) is associated to an expansion wave Dð1Þ, we conclude that the shock is accelerated when thefastest transmitted wave is an expansion wave, and is decelerated otherwise. In both cases the jump in theshock acceleration increases indefinitely as the Mach number M0 gets larger. From (31)2,3 we also observe thatthe strengths of the both transmitted waves approach finite values as M0!1. Moreover, it is interesting tonote that these values are the same as the ones found in (27)2,3. This means that the transmitted waves gen-erated in the interaction Sð3Þ ! Dð2Þ are not distinguishable from those generated in the interactionSð3Þ ! Dð1Þ, when the incident waves have the same strength.
The numerical results shown in Fig. 7 confirm that a shock increases as the Mach number M0 increases. It isalso appreciable that the fastest transmitted wave after the impact, Dð1Þ, increases its amplitude when the Machnumber gets larger, being quite difficult to observe when M0 = 1.5 and being completely observable forM0 = 3.5. At the same time, the wave Dð2Þ is magnified by the impact, in accordance to what seen in Fig. 6c.
5.4. Case D: Interaction Dð3Þ ! Sð2Þ
The interaction between the acceleration wave Dð3Þ and the characteristic shock Sð2Þ (already studied in [11])gives rise to one reflected wave, Dð1Þ, and one transmitted wave, Dð3Þ. Taking into account Eq. (12) and lettingr = q/q0, the quantities s_st, [qx](1) and [qx](2) are obtained as functions of the parameter r. For a monatomicgas we obtain:
Fig.
s_st
Gð3Þ¼ Gð3Þ0
Gð3Þ¼ 2
ffiffirp
1þffiffirp ;
½qx�ð1Þ
½qx�ð3Þ ¼
Gð1Þ
Gð3Þ¼ 1� 2
1þffiffirp ;
½qx�ð3Þ0
½qx�ð3Þ ¼
2
r r þffiffirp
ð Þ : ð32Þ
The behavior of the quantities (32) as functions of r is shown in Fig. 8. It is interesting to note that Eq. (32) areindependent of c; therefore, they hold for every kind of gas, monatomic or not. This is due to the fact that theRankine–Hugoniot conditions are, in this circumstance, independent of c (the pressure p is, as seen in Eq. (12),constant through the contact wave).
Weak shock (r! 1). For a weak shock, we have
s_st
Gð3Þ¼ Gð3Þ0
Gð3Þ¼ 1þ f
4þO f2
� �;½qx�
ð1Þ
½qx�ð3Þ ¼
Gð1Þ
Gð3Þ¼ f
4þO f2
� �;½qx�
ð3Þ0
½qx�ð3Þ ¼ 1� 7
4fþO f2
� �; ð33Þ
–0.1 0 0.1 0.2 0.3 0.40.8
1.5
2.2
2.9
3.6
x
ρ
t = τ*
–0.1 0 0.1 0.2 0.3 0.40.8
1.5
2.2
2.9
3.6
x
ρ
t = τ* + 0.2
–0.1 0.1 0.3 0.5 0.70
2
4
6
8
x
ρ
t = τ*
–0.1 0.1 0.3 0.5 0.70
2
4
6
8
x
ρ
t = τ* + 0.2
7. Case C ðSð3Þ ! Dð2ÞÞ. Density fields at different instants t with ½qx�ð2Þ0 > 0 and M0 = 1.5 (top row), M0 = 3.5 (bottom row).

Fig. 8. Case D ðInteraction Dð3Þ ! Sð2ÞÞ. Dependence of (a) s_st=Gð3Þ; (b) [qx](1)/[qx](3) = G(1)/G(3); (c) ½qx�ð3Þ0 =½qx�
ð3Þ on the parameter r fora monatomic gas. The behavior of Gð3Þ0 =Gð3Þ exactly matches the behavior of s_st=Gð3Þ.
–0.6 –0.4 –0.2 0 0.2 0.4 0.60.8
1.8
2.8
3.8
4.8
x
ρ
t = τ*
–0.6 –0.4 –0.2 0 0.2 0.4 0.60.8
1.8
2.8
3.8
4.8
x
ρ
t = τcr
–0.6 –0.4 –0.2 0 0.2 0.4 0.60.8
1.3
1.8
2.3
2.8
x
ρ
t = τ*
–0.6 –0.4 –0.2 0 0.2 0.4 0.60.8
1.3
1.8
2.3
2.8
x
ρ
t = τimp
+ 0.3
Fig. 9. Case D ðDð3Þ ! Sð2ÞÞ. Density fields at different instants t with ½qx�ð3Þ0 < 0 (compression wave) and r = 2.5 (top row) and with
½qx�ð3Þ0 > 0 (expansion wave) and r = 2.50 (bottom row).
A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 513
where we have defined f = r � 1.From (33)1, and from Fig. 8a, it is easily seen that, as the shock becomes weaker and weaker (i.e. f! 0), the
jump in the shock acceleration does not vanish and the incident acceleration wave is transmitted almost unal-tered through the shock, in accordance with the theoretical results.
Strong shock (r!1). From Eq. (32), it is easy to obtain
limr!1
s_st
Gð3Þ¼ lim
r!1
Gð3Þ0
Gð3Þ¼ 2; lim
r!1
½qx�ð1Þ
½qx�ð3Þ ¼
Gð1Þ
Gð3Þ¼ 1; lim
r!1
½qx�ð3Þ0
½qx�ð3Þ ¼ 0: ð34Þ
We notice that, as the contact wave Sð2Þ becomes very large, the incident wave is totally reflected and the jumpin the shock acceleration becomes twice the acceleration of the incident wave.
Numerical results for the cases of an expansion wave and of a compression wave impacting a characteristicshock are shown in Fig. 9. In both cases the incident acceleration wave in partially reflected and partiallytransmitted. Moreover, it is also clear that the jump in the shock acceleration is positive in the first caseand negative in the second one, in accordance with analytical results.

Fig. 10. Case E ðInteraction Sð3Þ ! Dð3ÞÞ. Dependence of (a) s_st=Gð3Þ0 ; (b) ½qx�ð1Þ=½qx�
ð3Þ0 ; (c) ½qx�
ð2Þ=½qx�
ð3Þ0 ; (d) Gð1Þ=Gð3Þ0 on the Mach
number M0 for a monatomic gas.
514 A. Mentrelli et al. / Wave Motion 45 (2008) 498–517
5.5. Case E: Interaction Sð3Þ ! Dð3Þ
In the case of interaction between the shock Sð3Þ and the acceleration wave Dð3Þ, the transmitted waves Dð1Þ
and Dð2Þ are generated. An analysis of the effects of varying the Mach number M0 on the jump in the shockacceleration and on the amplitudes of the transmitted waves leads to the results presented in Fig. 10.
Weak shock (M0! 1). For a weak shock, we have (z = M0 � 1):
s_st
Gð3Þ0
¼ � cþ14
zþO z2ð Þ; ½qx�ð1Þ
½qx�ð3Þ0
¼ 5�3c8 1þcð Þ z
3 þO z4ð Þ;
½qx�ð2Þ
½qx�ð3Þ0
¼ 4 c�1cþ1
� �z3 þO z4ð Þ; Gð1Þ
Gð3Þ0
¼ 5�3c8 cþ1ð Þ z
3 þO z4ð Þ:ð35Þ
It is easily seen that the jump in the shock acceleration vanishes, given that the shock and the accelerationwave belong to the same family. Moreover, it is possible to see that the transmitted waves Dð1Þ and Dð2Þ bothvanish as the shock becomes weaker and weaker. This is due to the fact that, for a vanishing shock (M0! 1),no interaction occurs.
Moreover, it is also interesting to note that the leading terms in Eqs. (35)2,3,4 are the same as those in Eqs.(28)2,3,4; this indicates that, when the incident waves have the same strength, the two reflected waves generatedby the interaction Dð3Þ ! Sð3Þ (case B) are not distinguishable from the two transmitted waves generated bythe interaction Sð3Þ ! Dð3Þ (case E), for a weak shock.
Strong shock (M0!1). In the strong shock situation, it is easy to obtain, for a monatomic gas,
limM0!1
s_st
Gð3Þ0
¼ 1; limM0!1
½qx�ð1Þ
½qx�ð3Þ0
� 1:566; limM0!1
½qx�ð2Þ
½qx�ð3Þ0
� 10:933; limM0!1
Gð1Þ
Gð3Þ0
¼ �1: ð36Þ
These results allow to say that, as the jump in the shock acceleration is unbounded and becomes larger as M0
increases, the amplitudes of both transmitted waves are bounded.

–0.5 0 0.5 1 1.5 2 2.5 30.8
1.4
2
2.6
3.2
x
ρt < τ
*
–0.5 0 0.5 1 1.5 2 2.5 30.8
1.4
2
2.6
3.2
x
ρ
t = τcr
–0.5 0 0.5 1 1.5 2 2.50.6
1
1.4
1.8
2.2
2.6
x
ρ
t < τ*
–0.5 0 0.5 1 1.5 2 2.50.6
1
1.4
1.8
2.2
2.6
xρ
t = τcr
Fig. 11. Case E ðSð3Þ ! Dð3ÞÞ. Density fields at different instants t with ½qx�ð3Þ0 < 0 (compression wave) and M0 = 2.83 (top row) and with
½qx�ð3Þ0 > 0 (expansion wave) and M0 = 2.11 (bottom row).
A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 515
From Fig. 10a for s_st
Gð3Þ0
ð¼ � s_stq0
c20½qx �ð3Þ0
Þ, we see that the shock is firstly accelerated (decelerated) when the incident
wave is characterized by ½qx�ð3Þ0 > 0 ð½qx�
ð3Þ0 < 0Þ, and otherwise for Mach number exceeding M0 � 2.36602.
In Fig. 11, the results of simulations involving interactions of a shock Sð3Þ and compression/expansionwaves Dð3Þ are shown. In this case, neither the impact time s* nor the shock velocity at t = s* can be evaluatedanalytically, since the shock does not travel in a constant state before the impact. This means that the Machnumber M0 at the impact time is not known, and can be estimated only numerically (for the cases shown inFig. 11, M0 � 2.83 for the compression wave and M0 � 2.11 for the expansion wave). As a consequence of thefact that the shock travels in an unknown state before the impact, nothing can be said concerning the sign ofthe jump in the shock acceleration. The numerical results presented here allow only to confirm that the ampli-tude of the wave Dð1Þ is very small (and so the wave itself is nearly unobservable), while the amplitude of thewave Dð2Þ is of the same order of magnitude of that of the incident wave.
6. Conclusions
A thorough analysis of the interaction process between a shock and an acceleration wave in an Euler fluidsatisfying the ideal gas law has been performed. Analytical results obtained by application of the general the-ory developed in [4] have been presented, along with results coming from numerical calculations, obtained forthe case of a monatomic gas. The analytical and numerical results have been compared; they appear to be inperfect agreement.
For the Sð3Þ ! Dð1Þ interaction (case A), it has been found that under the weak shock condition (M0! 1)the incident wave Dð1Þ is completely transmitted across the shock, while the jump in the shock acceleration isnot vanishing; this finding demonstrates the nonlinear character of the interaction process. On the other hand,under the strong shock condition (M0!1), two transmitted waves emerge after the interaction, whose ampli-tude is bounded. The jump in the shock acceleration, for a strong shock, is instead unbounded, and grows asthe Mach number M0 increases.
As to the Dð3Þ ! Sð3Þ interaction (case B), under the weak shock condition the jump in the shock acceler-ation vanishes and the incident acceleration wave is completely absorbed by the shock: no transmitted orreflected waves emerge after the interaction process. Under the strong shock condition, two reflected waves

516 A. Mentrelli et al. / Wave Motion 45 (2008) 498–517
are generated, the fastest being of the same order of magnitude as the incident wave, and the slower being veryweak and difficult to observe. Contrary to what happens with the Sð3Þ ! Dð1Þ interaction, the jump in theshock acceleration is bounded also for a strong shock.
The Sð3Þ ! Dð2Þ interaction (case C) exhibits a typical nonlinear behavior under the weak shock condition:the contact wave Dð2Þ is transmitted across the shock without being altered, but the jump in the shock accel-eration does not vanish. Under the strong shock condition, two easy-to-observe transmitted waves emergeafter the interaction.
As to the Dð3Þ ! Sð2Þ interaction (case D), in the weak shock case the acceleration wave is totally transmit-ted without alteration through the shock, while in the strong shock case the reflected and transmitted wavesboth have finite amplitudes, comparable to that of the incident wave; also the jump in the shock accelerationis finite. This case is the only one with both reflected and transmitted waves and is characterized by the factthat the amplitude of the generated waves and the jump in the shock acceleration are independent of the kindof gas (that is, from the ratio of the specific heats, c).
Finally, the Sð3Þ ! Dð3Þ interaction (case E) is characterized by two transmitted waves that are nearly notobservable in the weak shock situation and are finite in the strong shock case. Moreover, the jump in the shockacceleration vanishes in the weak shock situation, because the incident waves belong to the same family.
Acknowledgements
This work was developed during the stay in Nagoya of T.R. as visiting professor with a fellowship of JapanSociety for the Promotion of Science (JSPS) and was partially supported by: MIUR/PRIN Project Nonlinear
Propagation and Stability in Thermodynamical Processes of Continuous Media, Coordinator: T. Ruggeri (A.M.and T.R.); GNFM/INdAM Young Researcher Project, Coordinator: A. Mentrelli (A.M.); Daiko Foundation(No. 10100) (M.S. and N.Z.).
References
[1] C.M. Dafermos, Hyperbolic conservation laws in continuum physics, vol. 325, Grundlehren der Mathematischen Wissenschaften,Springer-Verlag, Berlin, Heidelberg, 2000.
[2] A. Jeffrey, The propagation of weak discontinuities in quasi-linear hyperbolic systems with discontinuous coefficients. I. Fundamentaltheory, Applicable Anal. 3 (1) (1973) 79–100;The propagation of weak discontinuities in quasi-linear hyperbolic systems with discontinuous coefficients. II. Special cases andapplications, Applicable Anal. 3 (4) (1974) 359–375.
[3] L. Brun, Ondes de ‘choc finies dans les solides elastiques, in: J. Mandel, L. Brun (Eds.), Mechanical Waves in Solids, Spinger Wien,1975.
[4] G. Boillat, T. Ruggeri, Reflection and transmission of discontinuity waves through a shock wave. General theory including also thecase of characteristic shocks, Proc. Roy. Soc. Edinburgh 83A (1979) 17–24.
[5] J. Glimm, Solutions in the large for nonlinear hyperbolic systems of equations, Comm. Pure Appl. Math. 18 (1965) 697–715.[6] J. Glimm, The interaction of nonlinear hyperbolic waves, Comm. Pure Appl. Math. 41 (1988) 569–590.[7] A. Strumia, Transmission and reflection of a discontinuity wave through a characteristic shock in non linear optics, Riv. Mat. Univ.
Parma. 4 (1978) 315–328.[8] A. Morro, Interaction of acoustic waves with shock waves in elastic solids, ZAMP 29 (1978) 822–827.[9] A. Morro, Interaction of waves with shocks in magnetofluiddynamics, Acta Mech. 35 (1980) 197–213.
[10] A. Donato, D. Fusco, Non-linear wave propagation in a layered half space, Int. J. Non-Linear Mech. 15 (1980) 497–503.[11] T. Ruggeri, Interaction between a discontinuity wave and a shock wave: Critical time for the fastest transmitted wave, example of the
polytropic fluid, Appl. Anal. 11 (1980) 103–112.[12] S. Pluchino, Interaction of a weak wave with a characteristic shock in a hyperelastic medium, Mechanica 16 (1981) 192–195.[13] N. Virgopia, F. Ferraioli, Evolution of weak discontinuity waves in self-similar flows and formation of secondary shocks. The’point
explosion model’, ZAMP 33 (1982) 63–80.[14] F. Conforto, Interaction between weak discontinuities and shocks in a dusty gas, J. Math. Anal. Appl. 253 (2001) 459–472.[15] M. Pandej, V.D. Sharma, Interaction of a characteristic shock with a weak discontinuity in a non-ideal gas, Wave Motion 44 (2007)
346–354.[16] A. Mentrelli, T. Ruggeri, Asymptotic behavior of Riemann and Riemann with structure problems for a 2 · 2 hyperbolic dissipative
system, Suppl. Rend. Circ. Mat. Palermo – Nonlinear Hyperbolic Fields and Waves, A tribute to Guy Boillat II/78 (2006) 201–226.[17] G. Boillat, La Propagation des Ondes, Gauthier-Villars, Paris, 1965.[18] T. Ruggeri, Stability and discontinuity waves for symmetric hyperbolic systems, in: A. Jeffrey (Ed.), Nonlinear Wave Motion,
Longman, NewYork, 1989, pp. 148–161.

A. Mentrelli et al. / Wave Motion 45 (2008) 498–517 517
[19] A. Muracchini, T. Ruggeri, L. Seccia, Continuum approach to phonon gas and shape changes of second sound via shock wave theory,Nuovo Cimento D 16 (1) (1994) 15–44.
[20] S.F. Liotta, V. Romano, G. Russo, Central scheme for balance laws of relaxation type, SIAM J. Numer. Anal. 38 (2000)1337–1356.
[21] H. Nessyahu, E. Tadmor, Non-oscillatory central differencing for hyperbolic conservation laws, J. Comput. Phys. 87 (1990)408–463.
Related Documents











