International Journal of Robust and Nonlinear Control SPECIAL ISSUE on DELAY SYSTEMS Preprint Input-Output Linearization with Delay Cancellation for Nonlinear Delay Systems: the Problem of the Internal Stability A. Germani, C. Manes, P. Pepe Dipartimento di Ingegneria Elettrica Universitμ a degli Studi dell'Aquila Monteluco di Roio 67040 L'Aquila - ITALY Fax. ++39 { 0862 434403 e-mail: [email protected] Abstract This paper investigates the issue of the internal stability of nonlinear delay systems con- trolled with a feedback law that performs exact input-output linearization and delay cancela- tion. In previous works the authors showed that, di®erently from the case of systems without state delays, when the relative degree is equal to the number of state variables and the output is forced to be identically zero, delay systems still possess a non trivial internal state dynam- ics. Not only: in the same conditions delay systems are also characterized by a non trivial input dynamics. Obviously, both internal state and input dynamics should give bounded trajectories, otherwise the exact input-output linearization and delay cancelation technique cannot be applied. This paper studies the relationships between the internal state and input dynamics of a controlled nonlinear delay system. An interesting result is that a suitable stability assumption on the internal state dynamics ensures that, when the output is asymp- totically driven to zero, both the state and control variables asymptotically decay to zero. Keywords: Nonlinear Systems, Delay Systems, Output Regulation, In¯nite Dimensional Systems, Delay Cancelation. This work is supported by ASI (Italian Aerospace Agency). 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
International Journal of Robust and Nonlinear Control
SPECIAL ISSUE on DELAY SYSTEMS
Preprint
Input-Output Linearization with Delay Cancellation
for Nonlinear Delay Systems:
the Problem of the Internal Stability
A. Germani, C. Manes, P. Pepe
Dipartimento di Ingegneria ElettricaUniversitµa degli Studi dell'Aquila
Monteluco di Roio 67040 L'Aquila - ITALYFax. ++39 { 0862 434403
e-mail: [email protected]
Abstract
This paper investigates the issue of the internal stability of nonlinear delay systems con-
trolled with a feedback law that performs exact input-output linearization and delay cancela-
tion. In previous works the authors showed that, di®erently from the case of systems without
state delays, when the relative degree is equal to the number of state variables and the output
is forced to be identically zero, delay systems still possess a non trivial internal state dynam-
ics. Not only: in the same conditions delay systems are also characterized by a non trivial
input dynamics. Obviously, both internal state and input dynamics should give bounded
trajectories, otherwise the exact input-output linearization and delay cancelation technique
cannot be applied. This paper studies the relationships between the internal state and input
dynamics of a controlled nonlinear delay system. An interesting result is that a suitable
stability assumption on the internal state dynamics ensures that, when the output is asymp-
totically driven to zero, both the state and control variables asymptotically decay to zero.
Keywords: Nonlinear Systems, Delay Systems, Output Regulation,
In¯nite Dimensional Systems, Delay Cancelation.
This work is supported by ASI (Italian Aerospace Agency).
1
1. Introduction
Some control problems for nonlinear systems can be solved through a preliminary com-
pensation of nonlinearities, so that virtually all control techniques developed for linear
systems can be applied to the linearized system (see e.g. [9]). In the same way, when
dealing with delay systems, a feasible approach to control problems is the preliminary
compensation of all delays, followed by the application of control techniques developed for
systems without delays. Nonlinear systems with state and input delays can be object of
various kinds of compensation of nonlinearities and delays: the linearization can be exact
or approximated, the delay can be partially compensated through prediction or, in some
cases, can be exactly canceled. The approach of preliminary delay compensation through
prediction is pursued in [8, 11, 14]. After delay compensation, classical tools of di®erential
geometry can be applied for the analysis of nonlinear systems and for control synthesis.
A di®erent approach is followed in [4, 6, 15, 16, 18, 19], where preliminary delay compen-
sation is avoided and suitable extensions of di®erential geometry have been developed for
dealing with delay systems. The papers [15, 16] were concerned mainly with the problem
of disturbance decoupling, while papers [4, 6, 18, 19] developed the extension to delay sys-
tems of the classical technique of input-output (I/O) linearization [9]. In these works exact
I/O linearization was obtained together with exact delay cancelation by means of a state
feedback. After exact I/O linearization and delay cancelation the problem of driving the
output exponentially to zero becomes an easy task. However, output stabilization is not
su±cient to achieve state stabilization, because the control law that achieves an identically
zero output may create an unobservable dynamics, denoted zero-dynamics. As in the case
of systems without delays, the stability of the zero-dynamics is a necessary condition for
the practical use of the control law that linearizes the I/O map and removes the delay. It
is well known that systems without state delay do have non trivial zero dynamics if and
only if the relative degree is smaller than the number of state variables. This situation
is investigated in [19] for the case of delay systems, and it is shown that, under suitable
assumptions, the local asymptotic stability of the zero-dynamics implies the local asymp-
totic stability of the origin of the controlled delay systems. In [6] it has been shown that,
di®erently from the case of systems without state delays, nonlinear delay systems with
relative degree equal to the number of state variables (full relative degree) may have, in
general, a non trivial zero-dynamics. For such systems a su±cient stability criterion of
the state zero-dynamics is discussed in [6]. The existence of the state internal dynamics in
the case of full relative degree is due to intrinsic in¯nite dimensionality of delay systems.
A necessary and su±cient condition which characterizes delay systems that do not admit
state internal dynamics is reported in [3].
This paper points out that in addition to the internal state dynamics, the output
stabilizing control law through I/O linearization and delay cancelation induces also an
internal dynamics of the control variable (input dynamics). This means that the true
zero-dynamics for nonlinear delay systems is composed of both the internal state and
input dynamics, and both the state and input trajectories must be uniformly bounded,
2

otherwise the technique of exact input-output linearization with delay cancelation cannot
be applied. The remarkable result obtained in this work is that the stability of the input
dynamics is not an additional assumption, but is implied by a suitable stability property
of the internal state dynamics. Such property will be proved with reference to the class
of nonlinear systems with delay only in the state. Similar results are proved in [13] with
reference to the class of linear systems with delays both in the state and in the input; in
this case an additional stability condition is also needed.
2. Problem Statement and Preliminaries
This paper considers delay systems described by the following equations
_x(t) = f(x(t); x(t¡¢)) + g(x(t); x(t¡¢))u(t); t ¸ 0; (2.1)
y(t) = h(x(t)); (2.2)
where ¢ > 0, x(t) 2 IRn, u(t) 2 IR and y(t) 2 IR, the vector functions f and g are C1with respect to both arguments, and h is a C1 scalar function. The model description is
completed by the knowledge of the function x(¿), ¿ 2 [¡¢; 0], in a suitable function space,which represents the initial state in the classical in¯nite dimensional description of delay
systems. It is assumed that system (2.1), (2.2) is such that
f(0; 0) = 0; g(0; 0)6= 0; h(0) = 0: (2.3)
These positions imply that the state x(¿) = 0, ¿ 2 [¡¢; 0], is an equilibrium point. In the
following some notations are introduced in order to simplify the writing of mathematical
expressions. Throughout the paper the symbol 0a£b denotes the zero matrix in IRa£b,while Ia denotes the identity matrix in IR
a£a. The symbols ABp£q; BBp£q; C
Bp£q will denote
the block-Brunowsky triplet de¯ned as
ABp;q =
2666640q£q Iq ¢ ¢ ¢ 0q£q0q£q 0q£q ¢ ¢ ¢ 0q£q...
... ¢ ¢ ¢ ...0q£q 0q£q ¢ ¢ ¢ Iq0q£q 0q£q ¢ ¢ ¢ 0q£q
377775 2 IRpq£pq BBp;q =
26640q£q0q£q...Iq
3775 2 IRpq£q;CBp;q = [ Iq 0q£q ¢ ¢ ¢ 0q£q ] 2 IRq£pq;
(2.4)
The symbol Xi;j , with i; j integer numbers, will denote a vector in IR(ji¡jj+1)n, composedof subvectors Âk 2 IRn as follows
if i · j : Xi;j =
2664ÂiÂi+1...Âj
3775 if j < i : Xi;j =
2664ÂiÂi¡1...Âj
3775 : (2:5)
3

In the same way, the symbol Vi;j , will denote a vector in IR(ji¡jj+1), composed of scalarvk as follows
if i · j : Vi;j =
2664vivi+1...vj
3775 if j < i : Vi;j =
2664vivi¡1...vj
3775 : (2:6)
As in the case of nonlinear systems without delay, an important concept for the devel-
opment of an I/O linearizing feedback control law is the concept of relative degree, the
integer that indicates how many time derivatives of the output should be made in order
to have a direct relationship with the input. The concept of relative degree for nonlinear
delay systems was introduced independently in [1, 4, 15, 19], with little di®erences. Indeed,
many extensions of this concept can be made for nonlinear delay systems. Based on [1, 4,
15, 19], three possible de¯nitions of relative degree are reported here.
De¯nition 2.1. (Type-I relative degree) The nonlinear delay system (2.1), (2.2) is said
to have type-I relative degree r in an open set −r 2 IRn(r+1) if, de¯ning
F (X0;r) =
2666664f¡Â0; Â1
¢f¡Â1; Â2
¢...
f¡Âr¡1; Âr
¢0n£1
3777775 ; G(X0;r) =·diagr¡1i=0
©g¡Âi; Âi+1
¢ª0n£r
¸;
H(X0;r) = h(Â0);
(2.7)
the following conditions are veri¯ed 8X0;r 2 −r
LGLkFH(X0;r) = 0; k = 0; 1; : : : ; r ¡ 2;
LGLr¡1F H(X0;r)6= 0;
(2.8)
whereL0FH(X0;r) = H(X0;r);
LkFH(X0;r) =µ
@
@X0;rLk¡1F H
¶F (X0;r); k · r
LGLkFH(X0;r) =
µ@
@X0;rLkFH
¶G(X0;r); k · r ¡ 1:
(2.9)
If −r = IRn(r+1), the system is said to have uniform type-I relative degree r.
Remark 2.2. Note that the Lie derivative LkFH(X0;r) is well de¯ned only for k · r andis a function of X0;k, a sub-vector of X0;r. Similarly, the term LGLkFH(X0;r) is well-de¯nedonly for k · r ¡ 1 and is a function of X0;k+1.
4

De¯nition 2.3. (Type-II relative degree) The nonlinear delay system (2.1), (2.2) is said to
have type-II relative degree r in an open set −r 2 IRn(r+1) if, de¯ning the vector functionsF (X0;r); G(X0;r);H(X0;r) as in (2.7), the following conditions are veri¯ed 8X0;r 2 −r
LGLkFH(X0;r) = 0; k = 0; 1; : : : ; r ¡ 2;
°0(X0;r)6= 0;(2.10)
where
°0(X0;r) =µ@
@Â0Lr¡1F H(X0;r)
¶g(Â0; Â1) = LGL
r¡1F H(X0;r)
·1
0(r¡1)£1
¸: (2.11)
If −r = IRn(r+1), the system is said to have uniform type-II relative degree r.
De¯nition 2.4. (Type-III relative degree) The nonlinear delay system (2.1), (2.2) is
said to have type-III relative degree r in an open set −r 2 IRn(r+1) if, de¯ning the vec-tor functions F (X0;r); G(X0;r);H(X0;r) as in (2.7), the following conditions are veri¯ed8X0;r 2 −r
LGLkFH(X0;r) = 0; k = 0; 1; : : : ; r ¡ 2;
°0(X0;r)6= 0;°i(X0;r) = 0; i = 1; : : : ; r ¡ 1;
(2.12)
where
°i(X0;r) =µ@
@ÂiLr¡1F H(X0;r)
¶g(Âi; Âi+1): (2.13)
If −r = IRn(r+1), the system is said to have uniform type-III relative degree r.
Remark 2.5. The computation of the (type-I to III) relative degree of a nonlinear delay
system is made by constructing the vector functions F (X0;r); G(X0;r); H(X0;r) de¯ned in(2.7), for increasing values of the integer r, starting from r = 1, and checking for each r
if condition (2.8) is veri¯ed. If an r is found such that (2.8) holds, then the system has
type-I relative degree r. If, moreover, condition (2.10) holds, then the system has type-II
relative degree r. In the case also condition (2.12) is veri¯ed, then the system has type-III
relative degree r.
In order to study the role of the three types of relative degree in the input-output
relationship, it is useful to de¯ne a stack operator as follows. For a given function q(t) 2IRm, the symbol qi¢(t), with i nonnegative integer, will denote its translation by ¡i¢, i.e.qi¢(t) = q(t¡ i¢). Being x(t) de¯ned for t ¸ ¡¢, the delayed function xi¢(t) is de¯nedfor t ¸ (i¡ 1)¢, while ui¢(t) is de¯ned for t ¸ i¢, being u(t) de¯ned for t ¸ 0.De¯nition 2.6. Consider a function q(t) 2 IRm, de¯ned for t 2 [t1; t2] µ IR. The symbolStack i;j(q), with i; j such that 0 · jj ¡ ij · (t2¡ t1)=¢, denotes a vector function, de¯ned
5
for t 2 [t1+j¢; t2+i¢], if i · j, and for t 2 [t1+i¢; t2+j¢] if j > i, de¯ned as follows
if i · j : Stack i;j¡q¢(t) =
26664qi¢(t)
q(i+1)¢(t)...
qj¢(t)
37775; if j < i : Stack i;j¡q¢(t) =
26664qi¢(t)
q(i¡1)¢(t)...
qj¢(t)
37775:(2.14)
Using the stack operator, the following vector functions can be de¯ned:
Xi;j(t) = Stack i;j(x)(t); Ui;j(t) = Stack i;j(u)(t); (2.15)
that collect the values of the system variable x and of the input u at di®erent time instants.
Lemma 2.7. Assume that system (2.1), (2.2) has relative degree equal to r (of type-
I, type-II or type-III) in an open set −r µ IRn¢(r+1). Then for t ¸ (r ¡ 1)¢ the time
derivatives of the output until order r can be written in −r as
y(k)(t) = LkFH(X0;k(t)); k = 0; 1; : : : ; r ¡ 1; (2.16)
y(r)(t) = LrFH(X0;r(t)) + LGLr¡1F H(X0;r(t))U0;r¡1(t)
= LrFH(X0;r(t)) + °0¡X0;r(t)
¢u(t) + ¡
³X0;r(t)
´U1;r¡1(t); (2.17)
= LrFH(X0;r(t)) +r¡1Xi=0
°i¡X0;r(t)
¢ui¢(t);
where °i(X0;r) has been de¯ned in (2.13), and
¡(X0;r) = LGLr¡1F H(X0;r)·01£(r¡1)I(r¡1)
¸= [°1(X0;r) ¢ ¢ ¢ °r¡1(X0;r)] : (2:18)
Proof. The proof is readily obtained by direct calculations taking into account the de¯-
nitions of relative degree.
As said before, the concept of relative degree for nonlinear delay systems was intro-
duced independently in [1, 4, 15, 19]. In particular, the de¯nition given in [15] corresponds
to the type-I relative degree, while the one given in [4] corresponds to the type-II relative
degree and the one in [19,1] is of a the type-III relative degree. A system with type-I
relative degree r is such that the output derivative of order r at time t is an a±ne function
of the inputs at time t ¡ i¢, for some of integers i 2 [0; r ¡ 1]. A system with type-II
relative degree r is such that the r-th output derivative at time t is an a±ne function of
the input at time t and possibly of the inputs at times t ¡ i¢, for some of the integersi 2 [1; r ¡ 1]. A system with type-III relative degree r has the r-th output derivative at
time t that is an a±ne function of the input at time t and is not function of the input at
6

times t¡ i¢, for all integers i 2 [1; r ¡ 1]. In [7] an observation delay relative degree wasde¯ned, that is a type-I relative degree. For a nonlinear delay system the assumption to
have a type-III relative degree is rather strong. In this paper, following the approach of
[4], we will consider systems with type-II relative degree.
It is well-known that for nonlinear systems without delay when the relative degree
is equal to the dimension of the state space n, the existence of a state feedback that
achieves exact linearization of the input-output map implies the existence of the solution
of the problem of exact linearization of the system through a static state feedback and a
nonlinear change of coordinates (see [9]). The new coordinates are the output derivatives
up to order n ¡ 1. The stabilization of the system is obtained assigning the eigenvalues
to the system in the linear form. If the relative degree r is strictly less than n, only
a subsystem of dimension r can be linearized and stabilized through linearization and
stabilization of the input-output map. r eigenvalues can be assigned in this case. The
linearizing feedback induces an unobservable dynamics, the so-called zero-dynamics, that is
una®ected by the assigned eigenvalues. The control via exact linearization can be pursued
only if the zero-dynamics is stable. On the other hand, systems with full relative degree
do not have zero-dynamics, and therefore the exact linearization approach can be always
pursued. Unfortunately, this is not the case for nonlinear delay systems. Also when the
relative degree is equal to the dimension n of the system variable x, exact linearization of
the input-output map does not imply exact linearization of the system.
The control law that linearizes the input-output map with delay-cancelation is de-
scribed in the following proposition, whose simple proof can be found in [4, 6, 19]
Proposition 2.8. Assume that the nonlinear delay system (2.1), (2.2) has type-II relative
degree n in an open set −n. Moreover, assume that the initial state x0 2 C([¡¢; 0]; IRn)and the initial choice of the input u in the time interval [0; (n ¡ 1)¢) are such to guar-antee the existence and uniqueness of a continuous solution x(t) on [0; (n¡ 1)¢] and thatX0;n((n¡1)¢) 2 −n. Then, de¯ning a new input function v(t), the feedback control law
u(t) =v(t)¡ LnFH(X0;n(t))¡ ¡
¡X0;n(t)
¢U1;n¡1(t)
°0(X0;n(t)); t ¸ (n¡ 1)¢; (2.19)
is such that the input-output map becomes
y(n)(t) = v(t); t ¸ (n¡ 1)¢; (2.20)
provided that, with the chosen v(t), X0;n(t) exists unique continuous and remains in −n.
The output derivatives up to order n ¡ 1 can be written by de¯ning the followingmap © : IRn
2 7! IRn
z =
2664L0FH(Â0)L1FH(X0;1)
...Ln¡1F H(X0;n¡1)
3775 = ©¡X0;n¡1¢: (2.21)
7

After the substitution of X0;k with X0;k(t) in (2.21), that is giving to Âi the value x(t¡i¢),the map © gives a vector z(t) that collects the output derivatives up to order n¡ 1:
z(t) =
264 y(t)...
y(n¡1)(t)
375 = ©¡X0;n¡1(t)¢; t ¸ (n¡ 1)¢: (2.22)
After feedback (2.19) the input-output dynamics can be put in the form
_z(t) = ABn;1z(t) +BBn;1v(t);
y(t) = CBn;1z(t);t ¸ (n¡ 1)¢; (2.23)
where (ABn;1; BBn;1; C
Bn;1) is a Brunowsky triplet, as de¯ned in (2.4). Applying a linear
feedback law of the formv(t) = ¡kTz(t)
= ¡kT©¡X0;n¡1(t)¢ (2.24)
the output dynamics is governed by the autonomous linear system
_z(t) = (ABn;1 ¡BBn;1kT)z(t);y(t) = CBn;1z(t);
t ¸ (n¡ 1)¢: (2.25)
If k assigns all the eigenvalues of matrix ABn;1¡BBn;1kT in the open left half complex plane(i.e. k is Hurwitz) the output is exponentially stabilized, i.e. there exist positive °; ¯ such
that
kz(t)k · °e¡¯¡t¡(n¡1)¢
¢kz¡(n¡ 1)¢¢k; t ¸ (n¡ 1)¢: (2.26)
The feedback law that achieves exponential output stabilization, after linearization and
delay cancelation of the input-output map (as long as X0;n(t) 2 −n), is obtained replacingthe variable v in (2.19) with the expression (2.24), obtaining
u(t) =¡kTz(t)¡ LnFH(X0;n(t))¡ ¡
¡X0;n(t)
¢U1;n¡1(t)
°0(X0;n(t)); t ¸ (n¡ 1)¢: (2.27)
This equation describes the dynamics of the control variable u(t) for t ¸ (n ¡ 1)¢ in
closed loop. If the type-III relative degree is assumed, as in [18], it is °(X0;n) 6= 0 and
¡(X0;n) ´ 0 and it is evident that if z(t) and x(t) asymptotically go to zero, then also u(t)asymptotically goes to zero. This is the reason why in [19] the issue of the boundedness of
the control variable is not addressed. If the less-restrictive assumption of type-II relative
degree is made, the equation (2.27) is a continuous-time algebraic delay equation, where
the value of the control variable u at time t depends on n¡ 1 previous values of the samevariable and on old and present values of the state. Equation (2.27) can be put in the
form
u(t) = ¡ 1
°0(X0;n(t))kTz(t)¡p0(X0;n(t))¡
n¡1Xj=1
pj(X0;n(t))u(t¡j¢); t ¸ (n¡1)¢; (2.28)
8
where pj : −n ! IR, j = 0; 1; : : : ; n¡ 1 are de¯ned as
p0(X0;n) = LnFH(X0;n)°0(X0;n) ;
pj(X0;n) = °j(X0;n)°0(X0;n) ; j = 1; : : : ; n¡ 1:
(2:29)
Note that the vector of output derivatives behaves as an input for the input dynamics .
For this reason throughout the paper the dynamics described by equation (2.28) will be
also denoted as the output-driven input dynamics.
In the following it is shown that the internal dynamics of the system variable x(t) is
governed by the map z = ©(X0;n¡1) de¯ned in (2.21). In [7] this map is called observabilitymap of system (2.1)-(2.2), because suitable assumptions on this map allow the construction
of an observer for nonlinear time delay systems. The observability map can be seen as
a square map from Â0 to z, in which the sub-vector X1;n¡1 2 IRn(n¡1) is considered asa vector of parameters. To stress this point of view, in the following the map © will be
rewritten as follows
z = ©(Â0;X1;n¡1): (2.30)
For systems with type-II and type-III relative degree in a set −n, it is
det
µ@©(Â0;X1;n¡1)
@Â0
¶6= 0; 8X0;n¡1 2 −n: (2:31)
The proof can be found in [19] (Lemma 1). This implies that the map © is locally invertible
with respect to the ¯rst component Â0 (local partial invertibility).
From here on we suppose that the following assumption holds for the observability
map © (Global partial invertibility):
H1) System (2.1), (2.2) has uniform type-II relative degree equal to n (the dimension of
the system variable x) and there exists the inverse ©¡1 of the function (2.30) w.r.t.the ¯rst component Â0 for all z 2 IRn and X1;n¡1 2 IRn(n¡1), that is
Â0 = ©¡1(z;X1;n¡1); 8z 2 IRn; X1;n¡1 2 IRn(n¡1): (2.32)
In the paper [7] assumption H1 is a necessary condition for the construction of an
asymptotic observer for a delay system.
The state dynamics of the system variable x(t) for t ¸ (n ¡ 1)¢ is governed by
the following continuous-time algebraic delay equation forced by the vector z(t) of output
derivatives
x(t) = ©¡1¡z(t); X1;n¡1(t)
¢: (2.33)
z(t) acts as an input in equation (2.33), and therefore such dynamics will be denoted
throughout this paper as the output-driven state dynamics. The stability of this dynamics
has been studied in the papers [6, 20], where su±cient conditions on the map © are
9

provided that ensure convergence of x(t) to zero when the output, together with its n¡ 1derivatives, is driven to zero by the control law (2.27). The output dynamics (2.25), the
state dynamics (2.33) and the input dynamics (2.28) of the closed loop-system, form a
triangular system of di®erential-algebraic equations, well de¯ned for t ¸ (n¡ 1)¢:
_z(t) = (ABn;1 ¡BBn;1kT)z(t); (2.34a)
x(t) = ©¡1¡z(t); X1;n¡1(t)
¢; (2.34b)
u(t) = ¡ kTz(t)
°0(X0;n(t))¡ p0(X0;n(t))¡ pT(X0;n(t))Un¡1;1(t); (2.34c)
where
pT(X0;n¡1) =£pn¡1(X0;n) ¢ ¢ ¢ p1(X0;n)
¤: (2.35)
The output dynamics (2.34a) is autonomous and can be made stable by a suitable choice of
the gain vector k. Obviously, the stability of the state dynamics and of the input dynamics
is a necessary condition for the overall stability of the controlled delay system.
Now consider an (open-loop) input function u(t), t 2 [0; (n¡ 1)¢] such to bring z(t)to zero at time t = (n¡ 1)¢, and then apply the feedback law (2.27), that keeps z(t) = 0for t ¸ (n¡ 1)¢. The equations (2.33) and (2.28) become, for t ¸ (n¡ 1)¢,
x(t) = ©¡1¡0; X1;n¡1(t)
¢; (2.36a)
u(t) = ¡p0(X0;n(t))¡ pT(X0;n(t))Un¡1;1(t); (2.36b)
Equation (2.36) is a continuous-time algebraic delay equation that describes the system
zero-dynamics, that is the internal state and input dynamics when the output is identically
zero. Note that the dynamics of x(t), given by (2.36a), is only a part of the zero-dynamics
and is completely characterized by the partial inverse map ©¡1, and in the following will bedenoted the state zero-dynamics. We will refer to eq. (2.36b) as the input zero-dynamics,
and we will say that the system zero-dynamics is composed of the state and input zero-
dynamics. Here follows a simple example of delay system with full uniform Type-II relative
degree with unstable zero-dynamics.
Example. Consider the following nonlinear delay systems
_x1(t) = x2(t) + ¾x2(t¡¢);_x2(t) =
¡1 + x21(t)
¢u(t);
y(t) = x1(t);
(2.37)
where ¾ 2 IR is a parameter. Instead to test the conditions given in the de¯nitions 2.1-
2.4 for r = 1; 2 : : :, the relative degree can be computed by repeatedly di®erentiating the
output with respect to time. The output and its ¯rst derivative are
y(t) = x1(t);
_y(t) = x2(t) + ¾x2(t¡¢):(2.38)
10

Since they do not depend on the input u(t), the relative degree must be greater than one.
The second order derivative is
Äy(t) =¡1 + x21(t)
¢u(t) + ¾
¡1 + x21(t¡¢)
¢u(t¡¢); (2:39)
and depends on both u(t) and u(t ¡ ¢). Since the coe±cient of u(t) is never zero, thesystem has uniform type-II relative degree r = 2. Equation (2.38) is the map ©(X0;1(t))
de¯ned in (2.22) that gives the output derivatives. The coe±cient °0(X0;2) de¯ned in (2.9)is¡1 + Â20;1
¢. The output stabilizing control law (2.27) is
u(t) =
µ¡¾¡1 + x21(t¡¢)¢u(t¡¢)¡ kT · x1(t)
x2(t)¡ 2x2(t¡¢)¸¶
1¡1 + x21(t)
¢ : (2.40)
This control law, with k such that AB2;1 ¡ BB2;1kT is stable, is such to drive y(t) and _y(t)exponentially to zero. The equations (2.36) of the zero-dynamics are the following
x1(t) = 0;
x2(t) = ¡¾x2(t¡¢);
u(t) = ¡¾ 1 + x21(t¡¢)
1 + x21(t)u(t¡¢);
t ¸ ¢: (2:41)
Considering that x1(t) = 0, the third equation becomes u(t) = ¡¾u(t¡¢). It follows thatthe zero-dynamics for system (2.37) is stable for j¾j · 1 and unstable for j¾j > 1. In thelatter case, the closed-loop system is unstable.
This example shows that it is not su±cient to have relative degree equal to the
dimension of the system vector x to stabilize a nonlinear delay system by means of expo-
nential output stabilization, after exact input-output linearization with delay cancelation.
In general there exists a zero-dynamics that may be unstable. In the case of systems with
type-III relative degree the input u(t) is a continuous function of only X0;n(t), and is not
a function of the past values u(t ¡ i¢), so that the stability of the state zero-dynamicstrivially implies the stability of the zero-dynamics.
3. The Case of Linear Delay Systems
This section shows the application of the exact input-output linearization with delay can-
celation to the case of linear delay systems. Obviously, in the linear case the interest of the
approach is in the delay cancelation. Moreover, this section presents some results on the
stability of the zero-dynamics that will be needed later in the paper to prove more general
results for nonlinear systems.
Consider a linear delay system of the form
_x(t) = A0x(t) +A1x(t¡¢) +Bu(t);y(t) = Cx(t)
(3.1)
11

with matrices A0; A1 2 IRn£n, B 2 IRn£1, C 2 IR1£n. The computation of the Lie
derivatives de¯ned in (2.9) gives
LiFH(X0;i) =iX
j=0
C (A0; A1)[i;j]
Âj (3.2)
where(A0; A1)
[i;j]= 0n£n; if i < 0 or j < 0;
(A0; A1)[0;0]
= In;
(A0; A1)[i;j]
= (A0; A1)[i¡1;j]
A0 + (A0; A1)[i¡1;j¡1]
A1:
(3:3)
From de¯nition (3.3) it follows that
i < j ) (A0; A1)[i;j]
= 0;
(A0; A1)[i;0]
= Ai0; (A0; A1)[i;i]
= Ai1:(3:4)
All de¯nitions (Type-I, II or III) of relative degree r require that
C (A0; A1)[i;j]
B = 0; i; j = 0; 1; : : : ; r ¡ 2: (3:5)
In the case r = n, the output derivatives up to order n¡ 1 can be written as
y(i)(t) =iX
j=0
C (A0; A1)[i;j]
xj¢(t); i = 0; 1; : : : ; n¡ 1; (3:6)
while the n-th order derivative is
y(n)(t) =nXj=0
C (A0; A1)[n;j]
xj¢(t) +n¡1Xj=1
C (A0; A1)[n¡1;j]
uj¢(t) + CAn¡10 Bu(t): (3:7)
In the case of linear systems having type-II relative degree n it is CAn¡10 B 6= 0, and thecontrol law (2.19) becomes
u =v ¡Pn
j=0C (A0; A1)[n;j]
xj¢ ¡Pn¡1j=1 C (A0; A1)
[n¡1;j]Buj¢
CAn¡10 B: (3.8)
De¯ning
sj =C (A0; A1)
[n¡1;j]B
CAn¡10 B; j = 1; : : : ; n¡ 1; (3.9)
qj =C(A0; A1)
[n;j]
CAn¡10 B; j = 0; : : : ; n; (3.10)
12

the control law (3.8) is written as
u(t) = ¡ v(t)
CAn¡10 B¡
nXj=0
qjxj¢(t)¡n¡1Xj=1
sjuj¢(t): (3.11)
In the case of linear systems the relative degree (of any type) is always uniform, and
the transformation of the I/O map in a chain of n integrators, i.e. y(n)(t) = v(t), is global.
The map © de¯ned in (2.21) is as follows
z =n¡1Xj=0
QjÂj ; (3.12)
where the n£ n matrix Q0 is the observability matrix of the pair (A0; C), i.e.
Q0 =
2664CCA0...
CAn¡10
3775 (3.13)
and the n £ n matrices Qj ; j = 1; 2; : : : ; n ¡ 1, can be computed using (3.2), and are asfollows
fQjg(i;:) = 0;fQjg(i;:) = C(A0; A1)[i¡1;j];
for i = 1; : : : ; j;
for i = j + 1; : : : ; n:(3.14)
where fQjg(i;:) denotes the i-th row of matrix Qj .Exponential convergence of the output y(t) to zero is obtained with the feedback law
(3.11) with v given by (2.24), so that the control law (2.28), de¯ned for t ¸ (n ¡ 1)¢,results to be
u(t) = ¡ kTz(t)
CAn¡10 B¡ qTXn;0(t)¡ sTUn¡1;1(t); (3.15)
where
qT = [ qn qn¡1 ¢ ¢ ¢ q0 ] ; (3.16)
sT = [ sn¡1 sn¡2 ¢ ¢ ¢ s1 ] : (3.17)
with qj and sj de¯ned in (3.10) and (3.9), respectively. With this control law, the vector of
output derivatives z(t) exponentially goes to zero, i.e. satis¯es (2.26) for suitable positive °
and ¯. The partial invertibility property of the map © with respect to the Â0 (assumption
H1) is equivalent to observability of the pair (A0; C). The inverse map ©¡1 de¯ned in
(2.32) is
Â0 = Q¡10 z ¡
n¡1Xj=1
Q¡10 QjÂj ; (3:18)
13

and the state dynamics (2.33) is
x(t) = Q¡10 z(t)¡n¡1Xj=1
Q¡10 Qjx(t¡ j¢): (3.19)
For our purposes it is convenient to de¯ne a coordinate transformation w(t) = Q0x(t), so
that the state dynamics can be rewritten as
w(t) = z(t)¡n¡1Xj=1
QjQ¡10 w(t¡ j¢): (3.20)
The continuous-time algebraic delay equations (3.15) and (3.20), that describe the input
and state dynamics, can be written as discrete-time equations on suitable Banach spaces.
Let B = L1([¡¢; 0]; IR) and de¯ne
~u(k) 2 B; ~u(k)(¿) = u(k¢+ ¿); ¿ 2 [¡¢; 0];~x(k) 2 Bn; ~x(k)(¿) = x(k¢+ ¿); ¿ 2 [¡¢; 0];~w(k) 2 Bn; ~w(k)(¿) = w(k¢+ ¿); ¿ 2 [¡¢; 0];~z(k) 2 Bn; ~z(k)(¿) = z(k¢+ ¿); ¿ 2 [¡¢; 0]:
(3.21)
Then, equation (3.15) can be put in the form
~u(k + n) = ¡kT~z(k + n)
CAn¡10 B¡
nXj=0
qjQ¡10 ~w(k + n¡ j)¡
n¡1Xj=1
sj ~u(k + n¡ j); k ¸ 0; (3.22)
while, de¯ning ~z(k) 2 Bn as ~z(k)(¿) = z(k¢+ ¿); ¿ 2 [¡¢; 0], (3.20) can be written as
~w(k + n) = ¡n¡1Xj=1
QjQ¡10 ~w(k + n¡ j) + ~z(k + n); k ¸ 0: (3.23)
When ~z(k + n) = 0, 8k ¸ 0, the equations (3.22) and (3.23) describe the system zero-
dynamics, while (3.23) describes the state zero-dynamics. De¯ning the extended vectors
eU(k) =264 ~u(k + 1)
...~u(k + n¡ 1)
375 2 B(n¡1); fW (k) =264 ~w(k)
...~w(k + n)
375 2 B(n+1)£n; (3.24)
(note that eU(k)(¿) = Stackn¡1;1¡u(k¢+ ¿)¢ and fW (k)(¿) = Stackn;0¡w(k¢+ ¿)¢) from(3.22) the following equations can be written
eU(k + 1) = ABn¡1;1 eU(k)¡BBn¡1;1 ³~qTfW (k) + sT eU(k)´+D0~º0(k);~u(k) = CBn¡1;1 eU(k); k ¸ 0; (3.25)
14

where ~º0(k) = ~z(k+n), (ABn¡1;1; B
Bn¡1;1; C
Bn¡1;1) is a Brunowsky triplet, as de¯ned in (2.4),
sT has been de¯ned in (3.17), and
~qT = [ qnQ¡10 qn¡1Q¡10 ¢ ¢ ¢ q0Q
¡10 ] ;
D0 = ¡ 1
CAn¡10 BBBn¡1;1k
T:(3:26)
In a similar way, from (3.23) the following equations can be written
fW (k + 1) = ABn+1;nfW (k)¡BBn+1;n§fW (k) +BBn+1;n~º1(k);~w(k) = CBn+1;nfW (k); k ¸ ¡1; (3.27)
where ~º1(k) = ~z(k + n+ 1), where (ABn+1;n; B
Bn+1;n; C
Bn+1;n) is a Brunowsky triplet and
§ = [ 0n£n 0n£n Qn¡1Q¡10 Qn¡2Q¡10 ¢ ¢ ¢ Q1Q¡10 ] (3.28)
(note that the ¯rst two blocks of matrix § are zero because ~w(k+ n+1) is not a function
of ~w(k) and ~w(k + 1)).
From (3.27) and (3.25) the state and input dynamics for the linear delay systems
(3.1) in closed loop, admits the following state-space representation (for k ¸ 0)
»(k + 1) =
·ABn+1;n ¡BBn+1;n§ 0(n+1)n£(n¡1)
¡BBn¡1;1qT ABn¡1;1 ¡BBn¡1;1sT¸»(k) +
·0(n+1)n£n BBn+1;n
D0 0(n¡1)£n
¸~º(k);·
~w(k)~u(k)
¸=
·CBn+1;n 0(n+1)£(n¡1)01£(n+1)n CBn¡1;1
¸»(k);
(3.29)
where
»(k) =
·fW (k)eU(k)¸2 B(n+1)n+n¡1; ~º(k) =
·~º0(k)~º1(k)
¸2 B2n: (3.30)
System (3.29) forced by ~º(k) = 0, k ¸ 0, describes the zero-dynamics of the delay system(3.1) on the Banach space B(n+1)n+n¡1. A representation of the state zero-dynamics is
fW (k + 1) = (ABn+1;n ¡BBn+1;n§)fW (k); k ¸ 0: (3.31)
The ¯rst result is as follows.
Lemma 3.9. Consider the triangular transition matrix of system (3.29). The eigenvalues
of the matrix ABn¡1;1¡BBn¡1;1sT are a subset of the eigenvalues of matrix ABn+1;n¡BBn+1;n§.Proof. The (n+1)n£ (n+1)n matrix ABn+1;n¡BBn+1;n§ can be put in a block-triangularform as follows
ABn+1;n ¡BBn+1;n§ =·
AB2;n ¦n0(n¡1)n£2n ABn¡1;n ¡BBn¡1;n ¹§
¸; (3.32)
15

where
¦n =
·0n£n 0n£n(n¡2)In 0n£n(n¡2)
¸(3:33)
(0n£n(n¡2) vanishes for n = 2) and
¹§ = [Qn¡1Q¡10 Qn¡2Q¡10 ¢ ¢ ¢ Q1Q¡10 ] ; (3.34)
so that 2n eigenvalues are the eigenvalues of AB2;n (all zero), and the remaining n(n ¡ 1)eigenvalues are those of ABn¡1;n ¡ BBn¡1;n ¹§. The proof that the n ¡ 1 eigenvalues of thematrix ABn¡1;1 ¡ BBn¡1;1sT are a subset of the n(n ¡ 1)n eigenvalues of the stable matrixABn¡1;n ¡BBn¡1;n ¹§ is obtained by showing that there exists a matrix M 2 IR(n¡1)n£(n¡1)such that ¡
ABn¡1;n ¡BBn¡1;n ¹§¢M =M
¡ABn¡1;1 ¡BBn¡1;1sT
¢: (3.35)
Note ¯rst that the last column of matrix Q¡10 is as follows
fQ¡10 g(:;n) = B 1
CAn¡10 B: (3:36)
This happens because the assumption of relative degree equal to n implies that the triplet
(C;A0; B) has relative degree n, that is
Q0B = (CAn¡10 B)dn; where dn =
26640...01
3775 2 IRn; (3:37)
and fQ¡10 g(:;n), by de¯nition, is the unique vector such that Q0fQ¡10 g(:;n) = dn. Recallingthe de¯nition (3.14) of matrices Qj appearing in matrix ¹§ (see (3.34)) it is trivially veri¯ed
that fQjg(i;:)fQ¡10 g(:;n) = 0 i = 1; : : : ; j. Moreover, being the delay relative degree equalto n, for i = j + 1; : : : ; n¡ 1, it is
fQjg(i;:)fQ¡10 g(:;n) = fQjg(i;:)B 1
CAn¡10 B=C(A0; A1)
[i¡1;j]BCAn¡10 B
= 0: (3:38)
At last, for i = n it is
fQjg(n;:)fQ¡10 g(:;n) = fQjg(n;:)B 1
CAn¡10 B=C(A0; A1)
[n¡1;j]BCAn¡10 B
= sj ; (3:39)
where the reals sj , de¯ned in (3.9), are the components of vector sT. Thus, the last
columns of the products QjQ¡10 , for j = 1; : : : ; n¡ 1, are
fQjQ¡10 g(:;n) = QjfQ¡10 g(:;n) = QjB 1
CAn¡10 B= sjdn; (3:40)
16
so that the matrix ABn¡1;n ¡BBn¡1;n ¹§ has the structure
ABn¡1;n ¡BBn¡1;n ¹§ =
2666640n£n In ¢ ¢ ¢ 0n£n0n£n 0n£n ¢ ¢ ¢ 0n£n...
... ¢ ¢ ¢ ...0n£n 0n£n ¢ ¢ ¢ In
¡[? sn¡1dn] ¡[? sn¡2dn] ¢ ¢ ¢ ¡[? s1dn]
377775 ; (3:41)
where the asterisks denote unessential n £ (n ¡ 1) matrices. On the other hand, the
structure of matrix ABn¡1;1 ¡BBn¡1;1sT is
ABn¡1;1 ¡BBn¡1;1sT =
2666640 1 ¢ ¢ ¢ 00 0 ¢ ¢ ¢ 0...
......
...0 0 ¢ ¢ ¢ 1
¡sn¡1 ¡sn¡2 ¢ ¢ ¢ ¡s1
377775 ; (3:42)
From these it is easily veri¯ed that matrix
M =
2664dn 0n£1 ¢ ¢ ¢ 0n£10n£1 dn ¢ ¢ ¢ 0n£1...
......
...0n£1 0n£1 ¢ ¢ ¢ dn
3775 2 IR(n¡1)n£(n¡1); (3:43)
satis¯es identity (3.35), and the Lemma is proved.
Theorem 3.10. Consider the linear delay system (3.1) and its state zero-dynamics,
de¯ned by (3.19) with z(t) ´ 0, and the zero-dynamics, de¯ned by both (3.19) and (3.15)with z(t) ´ 0. The following statements are true:i) the state zero-dynamics is exponentially stable if and only if all eigenvalues of matrix
ABn¡1;n ¡BBn¡1;n ¹§ de¯ned in (3.32) are inside the open unit circle;ii) if the state zero-dynamics is exponentially stable then also the zero-dynamics is ex-
ponentially stable.
Proof. The ¯rst assertion is proved by considering that, as previously discussed, the state
zero-dynamics of system (3.1) can be represented by the discrete time equation (3.31) on
the Banach space B(n+1)n. Then, the eigenvalues of ABn+1;n ¡ BBn+1;n§ inside the open
unit circle of the complex plane provide a necessary and su±cient condition for exponen-
tial stability. The second assertion is proved by considering the zero-dynamics represented
by (3.29) on B(n+1)n+n¡1. By the assumption of exponential stability of the state zero-dynamics it follows that all eigenvalues of ABn+1;n¡BBn+1;n§ are inside the open unit circle,and by Lemma 3.9 it follows that also all eigenvalues of matrix ABn¡1;1¡BBn¡1;1sT are insidethe open unit circle. As a consequence also the transition matrix of (3.29), thanks to its
triangular structure, has all eigenvalues in the open unit circle. This implies exponential
17

stability of the zero-dynamics of system (3.1).
Theorem 3.11. If the linear delay system (3.1) has an exponentially stable state zero-
dynamics, then the output stabilizing feedback law (3.15) is such that both x(t) and u(t)
exponentially go to zero.
Proof. By Theorem 3.10, the exponential stability assumption of the state zero-dynamics
implies the exponential stability of the zero-dynamics. This means that all eigenvalues of
the transition matrix in the representation (3.29) are inside the open unit circle. Standard
results on linear discrete time systems on Banach spaces allow to state that if the input
~º(k) is such that
k~º(k)k · ½¸k; k ¸ 0; (3.44)
for some ½ > 0 and ¸ 2 (0; 1), then there exist ¹ > 0 and ~̧ 2 [¸; 1) such that
k»(k)k · ¹¡½+ kfW (0)k¢~̧k; k ¸ 0: (3.45)
Recall that ~º(k)T = [~zT(k + n) ~zT(k + n + 1)] and that the control law (3.15) achieves
exponential decay of z(t), so that inequality (3.44) holds for some ½ > 0 and ¸ 2 (0; 1).Moreover, from de¯nitions (3.21), (3.24) and (3.30)
k~x(k)k · kQ¡10 k¢kfW (k)k · kQ¡10 k¢k»(k)k;k~u(k)k · keU(k)k · k»(k)k; (3:46)
so that from (3.45) exponential convergence to zero of both x(t) and u(t) easily follows.
4. Main Results for Nonlinear Delay Systems
As in the case of linear delay systems, the state and input dynamics of nonlinear delay
systems in closed-loop with the feedback law (2.27) admit a representation with a discrete
time system on a Banach space. Recall that the assumptions (2.3) imply that the state
x(¿) = 0, ¿ 2 [¡¢; 0], is an equilibrium point for system (2.1)-(2.2). Let
A0 =@f(Â0; Â1)
@Â0
¯̄̄(Â0;Â1)=(0;0)
; A1 =@f(Â0; Â1)
@Â1
¯̄̄(Â0;Â1)=(0;0)
; B = g(0; 0);
C =@h(Â0)
@Â0
¯̄̄Â0=0
;
(4.1)
so that the linear system (3.1) can be seen as the linear approximation of system (2.1)-(2.2)
around the origin.
Recalling the de¯nitions (2.9) and considering that f(0; 0) = 0 and h(0) = 0, it is
LiFH(0) = 0; i = 0; 1; : : : :
18

It follows that the map z = ©(X0;n¡1) de¯ned in (2.21) is such that ©(0) = 0, and its
linear approximation around X0;n¡1 = 0 provides the linear map de¯ned in (3.12), with
matrices Qj built up using the Jacobian (4.1). In particular
@LiFH(Â0; : : : ; Âi)
@Â0
¯̄̄X0;i=0
= CAi0; i = 0; 1; : : : ; n¡ 1 (4:2)
and from this@©(Â0; : : : ; Âi)
@Â0
¯̄̄X0;i=0
= Q0; (4:3)
where Q0 is the observability matrix of the pair (A0; C), de¯ned in (3.13), nonsingular if
a type-II relative degree n is assumed around the origin. Moreover, note that
°0(0) = CAn¡10 B; and p0(0) =
LnFH(X0;n)°0(X0;n)
¯̄̄X0;n=0
= 0:
The functions pj(X0;n), for j = 1; : : : ; n¡1, in the control law (2.28), when computedat X0;n = 0 give back pj(0) = sj , the coe±cients de¯ned in (3.9). The input dynamics canbe written as
u(t) = ¹(z(t);X0;n(t))¡¡sT + ~pT(X0;n(t))
¢Un¡1;1(t); (4.4)
where
¹(z;X0;n) = ¡ kTz
°0(X0;n) ¡ p0(X0;n);
~pT(X0;n) = ¹pT(X0;n)¡ sT(4.5)
so that ~pT(0) = 0. The linear approximation of equation (4.4) around the solution z(t) ´0; x(t) ´ 0; u(t) ´ 0, gives back equation (3.15).
The state dynamics (2.33) can be written in the coordinates w(t) = Q0x(t) as
w(t) = ª(z(t); w¢(t); : : : ; w(n¡1)¢(t)); (4.6)
where
ª(z; !1; ¢ ¢ ¢ ; !n¡1) = ©¡1(z;Q¡10 !1; ¢ ¢ ¢ ; Q¡10 !n¡1) (4.7)
The linear approximation of (4.6) around the solution z(t) ´ 0, x(t) ´ 0 gives equation
(3.20). It follows that all the results presented in the previous section devoted to linear
delay systems can be applied to the stability analysis of the linear approximation of the
state and input equations of nonlinear delay systems with the output stabilizing control
law (2.27).
In the following it will be shown that some assumptions on the global stability of the
state zero-dynamics imply a kind of global internal stability of the controlled nonlinear de-
lay system. The proof of this result is obtained using the linear stability analysis presented
in the previous section applied to the linear approximation of the state zero-dynamics. It
should not surprise that a local analysis helps in the proof of a global stability property:
a stronger global stability assumption has been made on the state zero-dynamics.
19
A ¯rst useful lemma is the following.
Lemma 4.12. Consider a nonlinear delay system (2.1)-(2.2) with uniform type-II relative
degree and globally partially invertible observability map (assumption H1). Assume that the
equilibrium x(t) ´ 0 of the state zero-dynamics (2.36a) is exponentially stable. Then, thelinear approximation of the zero dynamics (2.36) around x(t) ´ 0; u(t) ´ 0 is exponentiallystable.
Proof. From the previous discussion, equation (3.29), with ~º(k) ´ 0 is a representation ofthe linear approximation of the zero-dynamics (2.36) around x(t) ´ 0; u(t) ´ 0. Moreover,the assumption of exponential stability of the nonlinear state zero-dynamics implies ex-
ponential stability of the linear approximation of the state zero-dynamics. From assertion
(ii) of Theorem 3.10 the linear approximation of the zero dynamics is exponentially stable.
Di®erently from the case of linear systems, it is not obvious if the exponential stability
of the nonlinear state zero-dynamics (2.36a) implies that if z(t) asymptotically goes to
zero, then also x(t) asymptotically goes to zero. As a consequence, this kind of input-state
stability for the output-driven state dynamics (2.33) is a property that must be explicitely
assumed, together with the exponential stability of the state zero-dynamics.
De¯nition 4.13. The output-driven state dynamics (2.33) is said to be globally input-
state asymptotically (exponentially) stable if for all z(t) that asymptotically (exponentially)
go to zero and for all initial states, x(t) asymptotically (exponentially) goes to zero.
Remark 4.14. If the output-driven state dynamics (2.33) is globally Input-State
exponentially stable, then the state zero-dynamics is exponentially stable and the transition
matrix of the linear approximation (3.27) has all eigenvalues inside the unit circle. On
the other hand, if the linear approximation is exponentially stable, then the state zero-
dynamics is locally exponentially stable, and the output-driven state dynamics (2.33) is
locally Input-State exponentially stable.
As done for the output-driven input dynamics of linear delay systems with control
law (3.15) also the (output-driven) input dynamics of nonlinear delay systems can be
written on the Banach space B(n¡1) exploiting the same de¯nitions given in (3.21) and(3.24), but in this case the transition operator cannot be represented simply by a matrix
in IR(n¡1)£(n¡1). Regarding X0;n(t) as a time-varying parameter, equation (4.4) can bewritten as a time-varying system on the Banach Space B(n¡1) as follows
eU(k + 1) = ¡A+ S(k)¢eU(k)¡BBn¡1;1~¹(k); (4.8)
where A and S(k) are operators from Bn¡1 to B, de¯ned as
[AeU ](¿) = ¡ABn¡1;1 ¡BBn¡1;1sT¢[eU(k)](¿)[S(k)eU(k)](¿) = ~pT
¡X0;n((k + n)¢ + ¿)
¢[eU(k)](¿) ; ¿ 2 [¡¢; 0]; (4:9)
20

and the sequence ~¹(k) 2 B is de¯ned as
[~¹(k)](¿) = ¹³z((k + n)¢ + ¿);X1;n((k + n)¢ + ¿)
´; ¿ 2 [¡¢; 0]; (4:10)
where ~pT(X0;n) and ¹(z;X1;n) have been de¯ned in (4.5).The following theorem is the main result on the internal stability of nonlinear delay
systems controlled with the output-stabilizing law (2.27).
Theorem 4.15. Consider the control law (2.27), with k Hurwitz, applied to a non-
linear delay system (2.1)-(2.2) with uniform type-II relative degree and globally partially
invertible observability map (assumption H1). Assume that the state zero-dynamics is glob-
ally exponentially stable and that the output-driven state dynamics is globally input-state
asymptotically stable (de¯nition 4.13). Then, both the system variable x(t) and the input
variable u(t) asymptotically go to zero.
Proof. Thanks to the control law (2.27), with k Hurwitz, the vector z(t) exponentially
goes to zero. By the assumption of global Input-State asymptotic stability of the output-
driven state dynamics, also x(t) asymptotically goes to zero. The assumption of global
exponential stability of the state zero-dynamics implies that the linear approximation of
the state zero-dynamics on the Banach space B(n+1)n is exponentially stable, and thereforethat all eigenvalues of matrix ABn+1;n¡BBn+1;n§ are inside the open unit circle of the com-plex plane. Thanks to Lemma 3.9, also the eigenvalues of matrix ABn¡1;1¡BBn¡1;1sT, thatgoverns the linear approximation of the input dynamics (4.8) on Bn¡1, are inside the openunit circle. Now, note that the representation (4.8) is of the same type of the one described
by eq. (A.1) in the Appendix. Since z(t), x(t), and therefore X0;n(t), asymptotically go to
zero, recalling that, from (4.5), ~pT(0) = 0 and ¹(0; 0) = 0, the sequence k~¹(k)k and kS(k)kare bounded by sequences convergent to zero. Since the matrix ABn¡1;1¡BBn¡1;1sT has alleigenvalues inside the open unit circle, thanks to Lemma A.1, proved in the Appendix, it
follows that the sequence keU(k)k asymptotically tends to zero. This trivially implies thatu(t) asymptotically goes to zero, and the proof is complete.
Remark 4.16. The local exponential stability of the state zero dynamics, and hence the
local input-state exponential stability of the output-driven state dynamics, can be tested
by evaluating the eigenvalues of matrix ABn¡1;n¡BBn¡1;n ¹§. Global stability properties aremuch harder to investigate.
5. An Example
Consider the following delay system of the type (2.1), (2.2)
_x1(t) =x2(t)
1 + x21(t¡¢)+ ¾x2(t¡¢);
_x2(t) = x1(t)x2(t¡¢) + u(t);y(t) = x1(t)
(5.1)
21

where ¾ is a constant parameter. According to the de¯nition 2.3 it is not di±cult to
show that this system has uniform Type-II relative degree r = n = 2. Here follows the
expression of °0(X0;2), as de¯ned in (2.11),
°0(X0;2) = 1
1 + Â21;16= 0; 8X0;2 2 IR6: (5:2)
The substitution X0;2 = X0;2(t) in the previous equation yields
°0(X0;2(t)) =1
1 + x21(t¡¢): (5:3)
Following the de¯nition (2.21) the map z = ©(X0;2) can be easily constructed and canbe shown to be globally partially invertible, i.e. Â0 = ©¡1(z;X1;2) exists 8z 2 IR2 and8X1;2 2 IR4. After the substitutions of X0;2 with X0;2(t) and of X1;2 with X1;2(t), themaps © and ©¡1, for the given example, are as follows
z(t) = ©¡X0;2(t)
¢=
24 x1(t)x2(t)
1 + x21(t¡¢)+ ¾x2(t¡¢)
35 ; (5:4)
x(t) = ©¡1¡z(t);X1;2(t)
¢=
·z1(t)¡
z2(t)¡ ¾x2(t¡¢)¢¡1 + x21(t¡¢)
¢ ¸ : (5.5)
The control law (2.27) has the following expression
u(t) = ®¡z(t); x(t); x(t¡¢); x(t¡ 2¢)¢+ ¯¡x(t); x(t¡¢)¢u(t¡¢) (5.6)
with
® =¡1 + x21(t¡¢)
¢h¡kTz(t)¡ ¾x1(t¡¢)x2(t¡ 2¢) (5.7)
+x2(t)x1(t¡¢)¡1 + x21(t¡¢)
¢2³ x2(t¡¢)1 + x21(t¡ 2¢)
+ ¾x2(t¡ 2¢)´i;
¯ =¡ ¾¡1 + x21(t¡¢)¢: (5.8)
The gain vector kT = [k1 k2] is such to assign stable eigenvalues to the matrix
AB2;1 ¡BB2;1kT =·0 1¡k1 ¡k2
¸: (5.9)
The equation (5.5), when z(t) ´ 0, for t ¸ ¢, de¯nes the state-zero-dynamics of the system,and together with (5.6) de¯ne the system zero-dynamics (see eqn.'s (2.36)). According to
the results of Theorem 4.15, the convergence of the system variables (state and input)
to zero is guaranteed if the state-zero-dynamics is globally exponentially stable and if
the dynamics given by (5.5) is globally input-state asymptotically stable. Thanks to the
22

continuity of the map ©¡1, and suitably exploiting the ¯rst scalar equation (x1(t) = z1(t),for t ¸ ¢), it is not di±cult to prove that the null element of L1([¡¢;¢]; IR2) is a globallyexponentially stable equilibrium point of the state-zero-dynamics if and only if j¾j < 1.
Under the same condition on ¾ it can be shown that if z(t) asymptotically converges to
zero then also x(t) asymptotically decays to zero. Thanks to Theorem 4.15 it follows that
if j¾j < 1 then the feedback law (5.6), with stabilizing gain k, is such to asymptotically
drive to zero both the state and the input of system (5.1). All computer simulations have
shown that all system variables asymptotically go to zero when j¾j < 1.The results of two numerical simulations are presented below, in which two di®erent
values of the parameter ¾ are used. The delay ¢ used in the simulations is ¢ = 0:1. In
both simulations the initial state for the system has been chosen as
x(¿) =
·1¡1¸; ¿ 2 [¡0:1; 0]: (5:10)
The gain matrix kT in (5.6) used is kT = [20 9] (assigns eigenvalues ¸1 = ¡4 and ¸2 = ¡5to matrix (5.9)). The control law (5.6) is applied starting at time t = 0:1.
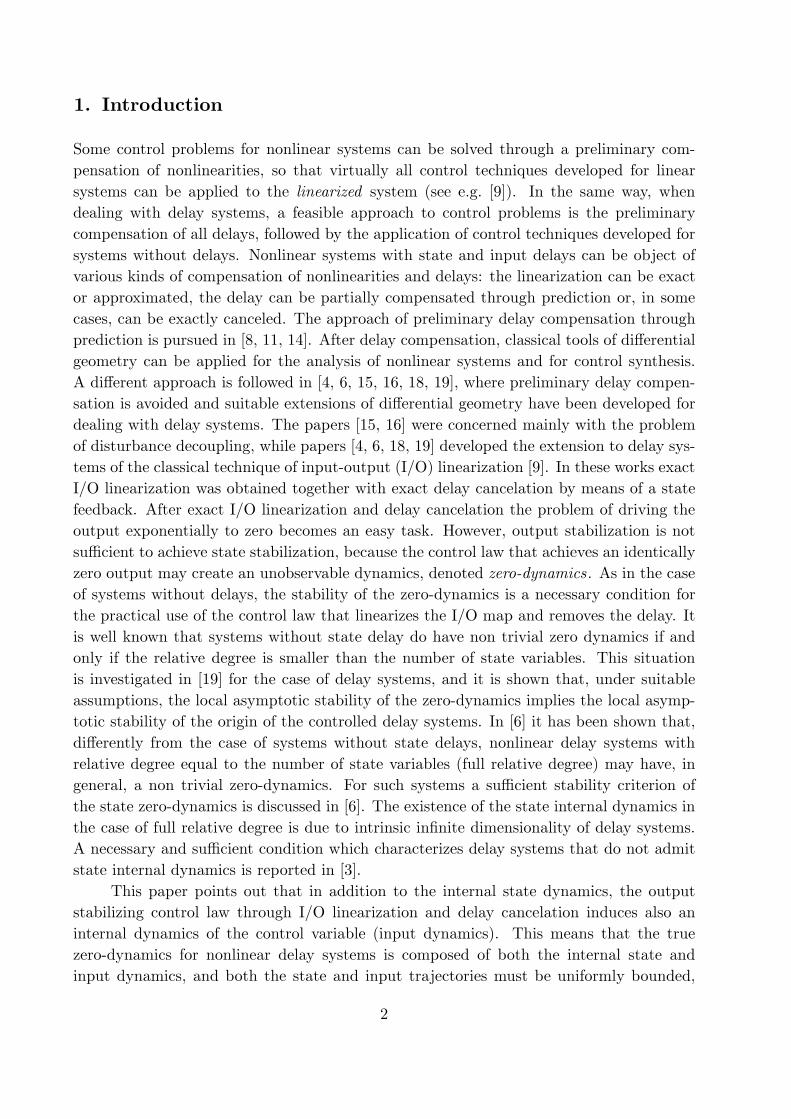
Figures 1 and 2 report simulation results when ¾ = 0:5. Figure 1 shows the state
evolution of the controlled system. Note that the ¯rst state component, the system output,
asymptotically goes to zero with a typical two modes exponential decay. Also the second
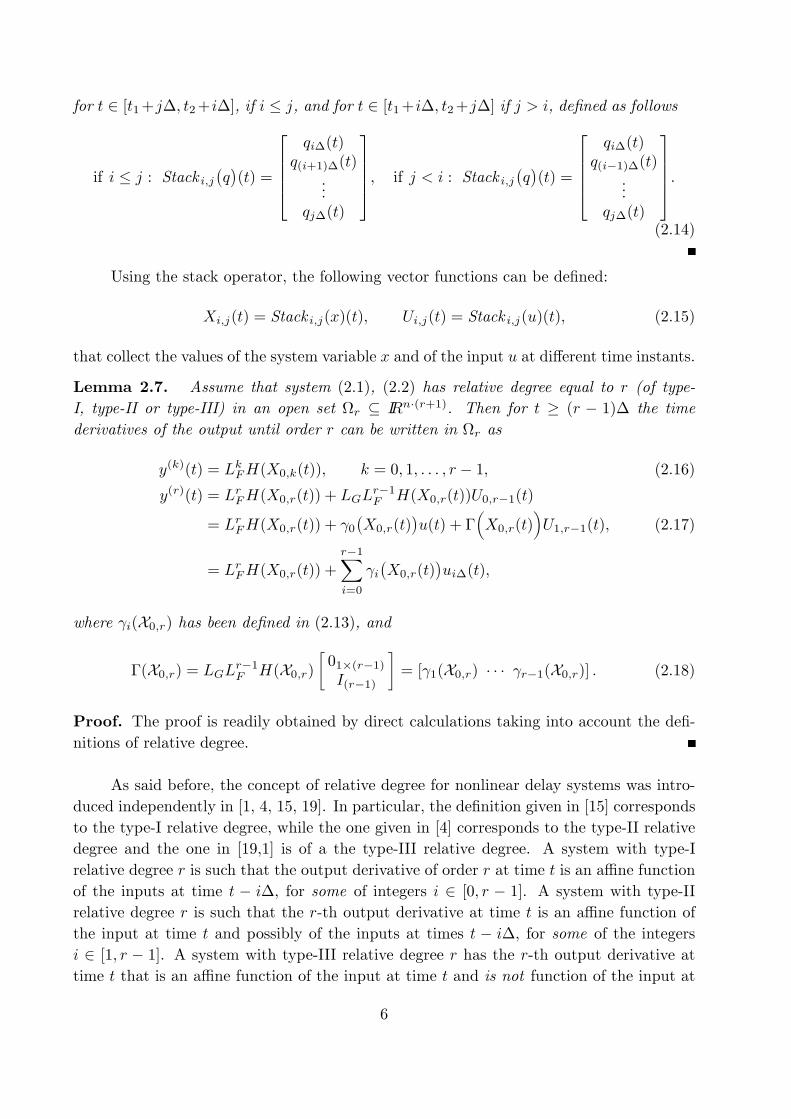
system variable asymptotically goes to zero, together with the input, depicted in Figure 2.
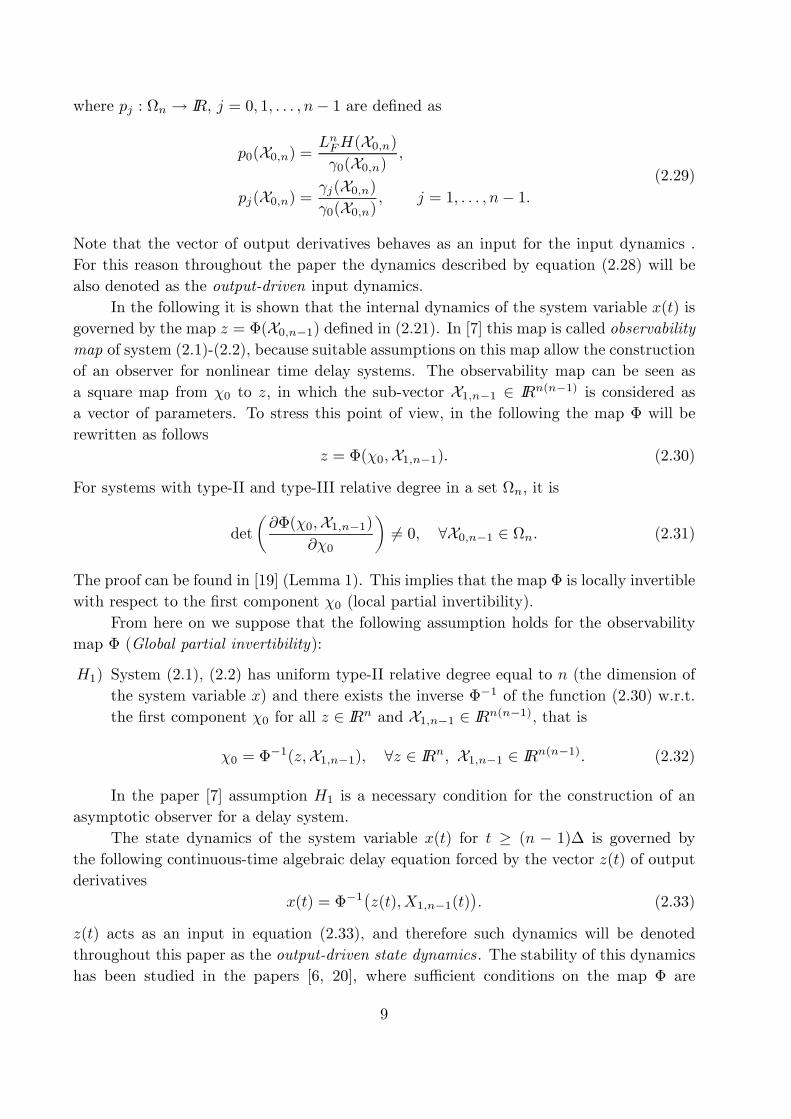
Figures 3 and 4 report simulation results when ¾ = 1:1. In this case some system
variables diverge. Figure 3 show that the ¯rst state component exponentially goes to zero,
exactly as in the previous simulation, while variable x2 diverges. This happens because
the state-zero-dynamics is unstable. Also the input variable diverges in this case, as shown
in ¯gure 4.
Figure 1. State evolution of the system for ¾ = 0:5.
23
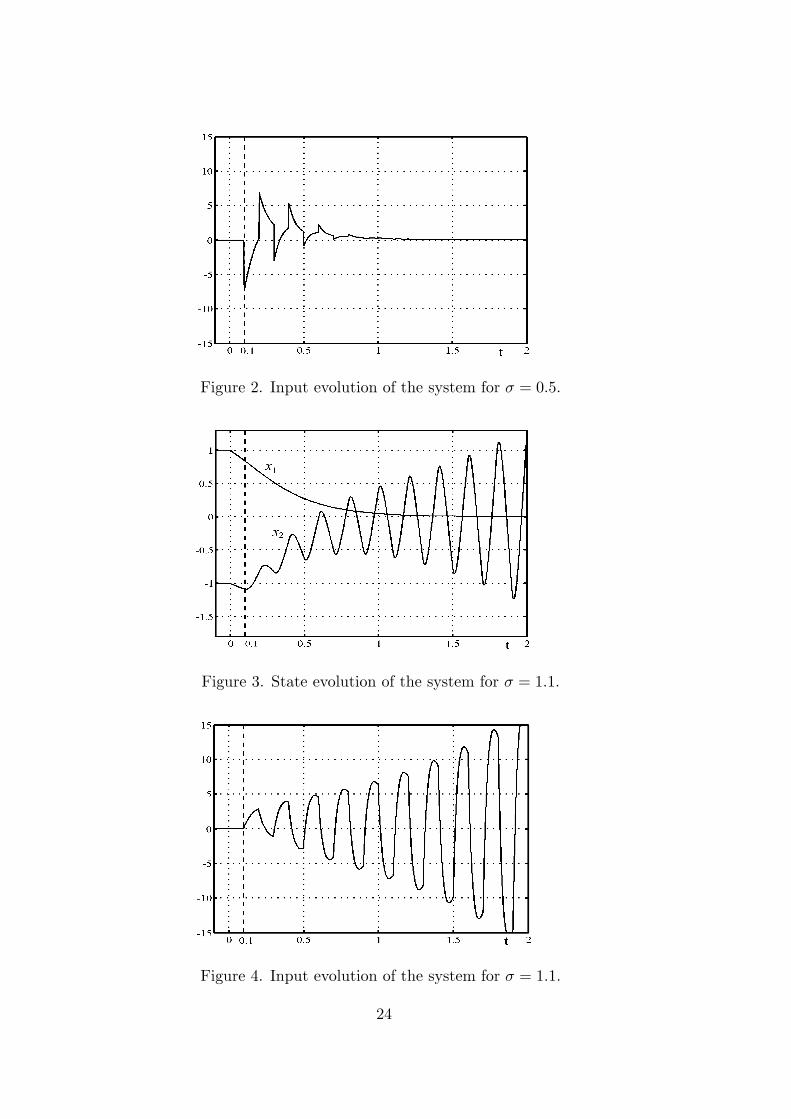
Figure 2. Input evolution of the system for ¾ = 0:5.
Figure 3. State evolution of the system for ¾ = 1:1.
Figure 4. Input evolution of the system for ¾ = 1:1.
24

6. Concluding Remarks
The technique of exact I/O linearization, originally developed for nonlinear systems with-
out state delay, has been recently applied to nonlinear delay systems by means of a suitable
extension of the tools of the standard di®erential geometry [4, 6, 15, 16, 18, 19]. Simul-
taneous I/O linearization and delay cancelation can be obtained for systems that have a
relative degree and have stable zero-dynamics (internal state and input dynamics when the
output is forced to be zero). In this paper we pointed out that, di®erently from the case of
systems without delay, for delay systems the full relative degree property does not imply
the absence of the zero-dynamics. The stability of the state zero-dynamics in the case of
full relative degree delay systems has been studied for the ¯rst time in [6]. In [19] the
authors discussed the issue of stability of what in this paper is called state zero-dynamics
(eq. (2.36a)) in the case of non-full relative degree, while the issue of stability of the total
zero-dynamics (eq.'s (2.36a) and (2.36b)) was not investigated because the authors con-
sidered a class of systems (those with type-III relative degree) that do not have input
zero-dynamics. This paper explicitely consider delay systems with full relative degree and
with non trivial state and input zero-dynamics. The main result presented here is that
a suitable stability assumption on the state zero-dynamics, a necessary assumption for
the applicability of the technique of exact I/O linearization with delay cancelation, in the
case of full relative degree implies the stability of the input zero-dynamics. This implies
the closed-loop stability of the nonlinear delay system, with the output zeroing controller.
Future work will involve the study of the internal state and input dynamics in the case of
not full relative degree.
25

Appendix
This Appendix reports a convergence result on linear time-varying systems on Banach
spaces that is needed in the proof of Theorem (4.15). Note that the symbols used in this
Appendix do not refer to quantities de¯ned in the main body of the paper.
Consider the Banach space S = L1([¡±; 0]; IR), and a linear time-varying systemdescribed by the equation
xk+1 =¡A+ Ek¢xk + Buk; k ¸ 0: (A.1)
where xk 2 Sn is the state, uk 2 Sp is the input sequence, and the operators A, Ek and Bare de¯ned as
[Axk](¿) = Axk(¿); A 2 IRn£n;[Ekxk](¿) = Ek(¿)xk(¿); Ek(¿) 2 IRn£n; ¿ 2 [¡±; 0][Buk](¿) = Bxk(¿); B 2 IRn£p;
(A.2)
where xk(¿) 2 IRn and uk(¿) 2 IRp, ¿ 2 [¡±; 0]. The time-varying operator Ek belongs toSn£n.
The norms kxkk and kukk are de¯ned as
kxkk = sup¿2[¡±;0]
kxk(¿)k; kukk = sup¿2[¡±;0]
kuk(¿)k; (A:3)
where kxk(¿)k and kxk(¿)k are the Euclidian norms in IRn and IRp, respectively.Lemma A.1. Consider the linear time-varying discrete-time system described by the
equation (A.1), together with a positive real ¹x0 and two bounded sequences of positive reals
f´(k)g, fv(k)g, k ¸ 0, such that
´(k) · ¹́; and limk!1
´(k) = 0;
v(k) · ¹v; and limk!1
v(k) = 0;(A.4)
for some positive ¹́ and ¹v. If the matrix A that de¯nes the operator A in (A.2) has all
eigenvalues inside the open unit circle, then there exists a sequence of positive reals fc(k)gsatisfying
limk!1
c(k) = 0; (A:5)
such that 8x(0); Ek; uk bounded by ¹x0; ´(k); v(k), respectively, i.e.
kx0k · ¹x0; kEkk · ´(k); kukk · v(k); 8k ¸ 0; (A.6)
the following inequality is satis¯ed
kx(k)k · c(k); 8k ¸ 0: (A.7)
26

Proof. When the input sequence fukg is identically zero in the linear system (A.1), the
following inequality holds
kxkk · (kAk+ ¹́)k¡jkxjk; 8k ¸ j ¸ 0; (A:8)
and the free state evolution is characterized by a bounded transition operator:
xk = ©(k; j)xj ; k ¸ j ¸ 0: (A.9)
It follows that
k©(k; j)k · (kAk+ ¹́)k¡j ; 8k ¸ j ¸ 0: (A:10)
The ¯rst step to prove the Lemma is to show that the assumption on the eigenvalues of
matrix A implies existence of a positive ¹ and of a ¸ 2 (0; 1) such that
k©(k; j)k · ¹¸k¡j ; k ¸ j ¸ 0: (A.11)
From the stability of matrix A it follows that there exists a pair of symmetric positive
de¯nite matrices P and Q such that
ATQA¡Q = ¡P; and¸min(P )
¸Max(Q)< 1: (A:12)
The inequality in (A.12) is true because Q ¸ P (note that Q ¡ P = ATQA ¸ 0), and
therefore ¸Max(Q) ¸ ¸min(P ).Consider now the positive de¯nite function V (xk), de¯ned as
V (xk) = sup¿2[¡±;0]
xTk (¿)Qxk(¿): (A.13)
Note that
¸min(Q)kxkk2 · V (xk) · ¸Max(Q)kxkk2: (A.14)
From the identity
xTk+1(¿)Qxk+1(¿) = xTk (¿)A
TQAxk(¿) + xTk (¿)
¡2ETk (¿)QA+E
Tk (¿)QEk(¿)
¢xTk (¿);
(A:15)
after substitution of AQAT with Q¡ P , and considering that, for x 2 IRn,
¡xTPx · ¡ ¸min(P )¸Max(Q)
xTQx; kxk2 · 1
¸min(Q)xTQx; (A:16)
it follows that
xTk+1(¿)Qxk+1(¿) ·Ã1¡ ¸min(P )
¸Max(Q)+2kEk(¿)k¢kQk
¡kAk+ kEk(¿)k¢¸min(Q)
!xTk (¿)Qxk(¿):
(A:17)
27

Taking the supremum over [¡±; 0]
V (xk+1) ·Ã1¡ ¸min(P )
¸Max(Q)+2kEkk¢kQk
¡kAk+ kEkk¢¸min(Q)
!V (xk) (A:18)
By assumptions (A.4) and (A.6) it is kEkk ! 0, so that there exists an integer ¹k and
½ 2 (0; 1) such that2kEkk¢kQk
¡kAk+ kEkk¢¸min(Q)
· ½ < ¸min(P )
¸Max(Q); 8k ¸ ¹k: (A:19)
It follows that
V (xk+1) · ¾V (xk); 8k ¸ ¹k; (A:20)
where ¾ 2 (0; 1) is de¯ned as¾ = 1¡ ¸min(P )
¸Max(Q)+ ½; (A:21)
and for k ¸ j ¸ ¹k, it isV (xk) · ¾k¡jV
¡xj); (A:22)
and from (A.14)
kxkk ·s¸Max(Q)
¸min(Q)¸k¡jkxjk; (A:23)
with ¸ =p¾ < 1. Recalling inequality (A.9) and de¯ning
¹ = max
(µ(kAk+ ¹́)
¸
¶¹k;1
¸¹k
s¸Max(Q)
¸min(Q)
); (A:24)
it is easy to check that
kxkk · ¹¸k¡jkx(j)k; 8k ¸ j ¸ 0: (A:25)
and from this inequality (A.11) is proved for all k ¸ j ¸ 0.When the input is not identically zero, the state evolution is written
xk = ©(k; 0)x0 +k¡1Xj=0
©(k; j + 1)Buj ; (A:26)
and therefore
kxkk · ¹¸kkx0k+k¡1Xj=0
¹¸k¡j¡1kBk¢kujk: (A:27)
Let
c(k) = ¹¸k¹x0 +k¡1Xj=0
¹¸k¡j¡1kBkv(j): (A:28)
28

By construction c(k) is such that (A.7) holds. It remains to prove that c(k) asymptotically
goes to zero, that is, for any " > 0 there exists a k" such that 8k ¸ k" it is c(k) < ". Tothis aim, rewrite c(k) setting k ¡ j ¡ 1 = i
c(k) = ¹¸k¹x0 +k¡1Xi=0
¹¸ikBkv(k ¡ i¡ 1): (A:29)
and split the summations as follows
c(k) = ¹¸k¹x0 +
º"Xi=0
¹¸ikBkv(k ¡ i¡ 1)
+k¡1X
i=º"+1
¹¸ikBkv(k ¡ i¡ 1);(A.30)
The ¯rst term in the expression (A.30) tends to zero (recall that ¸ =p¾ 2 (0; 1)), therefore
there exists k1;" such that 8k ¸ k1;" it is ¹¸k¹x0 · "=3. As for the third term in (A.30) it
isk¡1X
i=º"+1
¹¸ikBkv(k ¡ i¡ 1) ·1X
i=º"+1
¹¸ikBk¹v = ¹kBk¹v¸1¡ ¸ ¸º" : (A:31)
Since ¸ 2 (0; 1), it is easy to choose º" such that
¹kBk¹v¸1¡ ¸ ¸º" : · "
3: (A:32)
As for the second term in (A.30), de¯ning
¹w(k) = supi2[0;º"]
v(k ¡ i¡ 1): (A:33)
it isº"Xi=0
¹¸ikBk¹u(k ¡ i¡ 1) · ¡º" + 1¢¹kBk ¹w(k): (A:34)
Now, by assumption (A.4), ¹w(k) goes to zero and therefore there exists k2;" such that
º"Xi=0
¹¸ikBkv(k ¡ i¡ 1) · "
3; 8k ¸ k2;": (A:35)
As a result, denoting k" = maxfk1;"; k2;"g we have that
c(k) · "; 8k ¸ k"; (A:36)
and this concludes the proof.
29
References
[1] C. Antoniades and P. D. Christo¯des, Robust Control of Nonlinear Time-Delay Systems,Int. J. Appl. Math. and Comp. Sci., 1999, Vol. 9, No. 4, pp. 811-837.
[2] L. Dugard, E. I. Verriest, (Eds), Stability and Control of Time-delay Systems, Springer,1998.
[3] A. Germani, C. Manes, On the Existence of the Linearizing State-Feedback for Nonlin-ear Delay Systems, proc. of 40th IEEE Conf. on Decision and Control, pp. 4628{4629,Orlando, Florida, 2001.
[4] A. Germani, C. Manes and P. Pepe, Linearization of Input-Output Mapping for NonlinearDelay Systems via Static State Feedback, IMACS CESA Multiconference on Computa-tional Engineering in Systems Applications, Vol. 1, pp. 599{602, Lille, France, 1996.
[5] A. Germani, C. Manes and P. Pepe, A State Observer for Nonlinear Delay Systems, proc. of37th IEEE Conference on Decision and Control, Tampa, Florida, 1998.
[6] A. Germani, C. Manes and P. Pepe, Local Asymptotic Stability for Nonlinear State Feed-back Delay Systems, Kybernetika, Vol. 36, 2000.
[7] A. Germani, C. Manes and P. Pepe, An Asymptotic Observer for a Class of NonlinearDelay Systems, Kybernetika,, Vol.37, n. 4, pp. 459-478, 2001
[8] H.P. Huang, G.B. Wang, \Deadtime Compensation for Nonlinear Processes With Distur-bances," International Journal of Systems Science, Vol. 23, pp. 1761{1776, 1992.
[9] A. Isidori, Nonlinear Control Systems, 3rd edition, Springer-Verlag, Berlin, 1995.[10] B. Jakubczyk, W. Respondek, On Linearization of Control Systems, Bull. Acad. Polonaise
Sci. Ser. Sci. Math. 28,1980, pp. 517{522.[11] C. Kravaris and R.A. Wright, \Deadtime Compensation for Nonlinear Chemical Pro-
cesses," AIChE Journal, Vol. 35, pp. 1535{1542, 1989.[12] B. Lehman, J. Bentsman, S. V. Lunel and E. I. Verriest, Vibrational Control of Nonlinear
Time Lag Systems with Bounded Delay: Averaging Theory, Stabilizability, and TransientBehavior, IEEE Trans. Automat. Contr., No. 5, 1994, pp. 898{912.
[13] A. G. Loukianov, B. Castillo-Toledo, J. Escoto Hern¶andez, V. I. Utkin, "DecompositionFeedback Stabilization of Systems with Delay", 15th IFAC Triennal World Congress,Barcelona, Spain, 2002.
[14] E.S. Meadows and J.B. Rawlings, \Model Predictive Control". In Nonlinear ProcessControl, chapter 5, M.A. Henson and D.E. Seborg, eds., Prentice Hall, 1997.
[15] C. H. Moog, R. Castro, M. Velasco, The Disturbance Decoupling Problem for Non-linear Systems with Multiple Time-Delays: Static State Feedback Solutions, proc. ofIMACS CESA Multiconference on Computational Engineering in Systems Applications,Lille, France, 1996.
[16] C.H. Moog, R. Castro-Linares, M. Velasco-Villa, L.A.Marquez-Martinez, The DisturbanceDecoupling Problem for Time Delay Nonlinear Systems, IEEE Transactions on AutomaticControl, Vol. 45, No. 2, pp. 305-309, 2000.
[17] S.-I. Niculescu, Delay E®ects on Stability, a Robust Control Approach, Lecture Notes inControl and Information Sciences, Springer, 2001
[18] T. Oguchi and A. Watanabe, \Input-Output Linearization of Non-linear Systems WithTime Delays in State Variables", International Journal of Systems Science, Vol. 29, 573{578, 1998.
[19] T. Oguchi, A. Watanabe and T. Nakamizo, \Input-Output Linearization of Retarded Non-linear Systems by Using an Extension of Lie Derivative", Int. J. Control, Vol. 75, No. 8,582{590, 2002.
[20] P. Pepe, Stability of Time Varying Nonlinear Di®erence Equations with Continuous Time,3rd Workshop on Time-Delay Systems, Santa Fe, New Mexico, 2001
30
Related Documents











