Messprinzip Magnetischer Zahnradgeber RGM2G-A mit analogen Ausgangssignalen Berührungslos arbeitender Inkrementalgeber zur Messung von Drehbewegungen Hochauflösende Messung von Drehzahl und Drehwinkel bis 60.000 1/min Drehrichtungserkennung Robust, unempfindlich gegenüber Schmutz Temperaturstabil bis 110°C Hohe EMV- & ESD- Stabilität (bis 30kV) Kundenspezifische Ausführungen durch flexibles Konstruktionsprinzip I2C-Schnittstelle zur Einstellung der Signalparameter bei Bedarf Automatische Stabilisierung der Signalamplituden (Option) Verwendung in Antriebsspindeln von Werkzeug- maschinen, Einbau in Antriebsmotoren Magnetisches, berührungsloses Abtasten von Zahn- rädern aus Stahl mit einem Modul M = 0,3 oder 0,5 Nutzung magnetoresistiver (GMR-) Sensorelemente Hohe Messgenauigkeit bei Verwendung von Messzahn- rädern z.B. vom Typ ZR3-256/Di oder ZR5-256/Di Aufbau Robustes Sensorgehäuse aus Metall GMR-Sensorelemente Frontseitige Abdeckung der Sensorelemente mit Metallfolie als zusätzlicher Schutz vor ESD-Impulsen Elektronik zur Signalkonditionierung Vollständiger Verguss des Geberinnenraumes Geschirmtes Anschlusskabel mit AWG28 Anschlussstecker optional Ausgangssignale SIN- und COS-Signale mit 1Vss Referenzsignal Remote Sense RS_UB Versorgungsspannung UB = 5V Verpolungsschutz Kurzschlussfest RGM2G-A-...3 ... für Zahnräder mit Modul M = 0,3 RGM2G-A-...5 ... für Zahnräder mit Modul M = 0,5 Datei: VS-Sensorik_DB_D_RGM2G-A Version: 6 Blatt: 1 Datum: 01.11.2011 VS Sensorik GmbH, Edisonstr. 19, D-33689 Bielefeld, Tel: 05205 / 99 88 69 0, Fax: 05205 / 99 88 69 99, www.vs-sensorik.com

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Messprinzip
Magnetischer Zahnradgeber RGM2G-Amit analogen Ausgangssignalen
Berührungslos arbeitender Inkrementalgeber zurMessung von Drehbewegungen
Hochauflösende Messung von Drehzahl und Drehwinkelbis 60.000 1/minDrehrichtungserkennungRobust, unempfindlich gegenüber SchmutzTemperaturstabil bis 110°C
Hohe EMV- & ESD- Stabilität (bis 30kV)
Kundenspezifische Ausführungen durch flexiblesKonstruktionsprinzip
I2C-Schnittstelle zur Einstellung der Signalparameterbei BedarfAutomatische Stabilisierung der Signalamplituden(Option)
Verwendung in Antriebsspindeln von Werkzeug-maschinen, Einbau in Antriebsmotoren
Magnetisches, berührungsloses Abtasten von Zahn-rädern aus Stahl mit einem Modul M = 0,3 oder 0,5Nutzung magnetoresistiver (GMR-) SensorelementeHohe Messgenauigkeit bei Verwendung von Messzahn-rädern z.B. vom Typ ZR3-256/Di oder ZR5-256/Di
AufbauRobustes Sensorgehäuse aus MetallGMR-SensorelementeFrontseitige Abdeckung der Sensorelementemit Metallfolie als zusätzlicher Schutz vor ESD-ImpulsenElektronik zur SignalkonditionierungVollständiger Verguss des GeberinnenraumesGeschirmtes Anschlusskabel mit AWG28Anschlussstecker optional
AusgangssignaleSIN- und COS-Signale mit 1VssReferenzsignalRemote Sense RS_UBVersorgungsspannung UB = 5VVerpolungsschutzKurzschlussfest
RGM2G-A-...3... für Zahnräder mit Modul M = 0,3
RGM2G-A-...5... für Zahnräder mit Modul M = 0,5
Datei: VS-Sensorik_DB_D_RGM2G-A Version: 6 Blatt: 1 Datum: 01.11.2011
VS Sensorik GmbH, Edisonstr. 19, D-33689 Bielefeld, Tel: 05205 / 99 88 69 0, Fax: 05205 / 99 88 69 99, www.vs-sensorik.com
Magnetischer Zahnradgeber RGM2G-ATechnische Daten
Signalparameter
Signaltyp
Signalamplitude A & BAmplitudendifferenz A/BPhase A zu BOffset - statischMessfrequenz f
Allgemeine Parameter
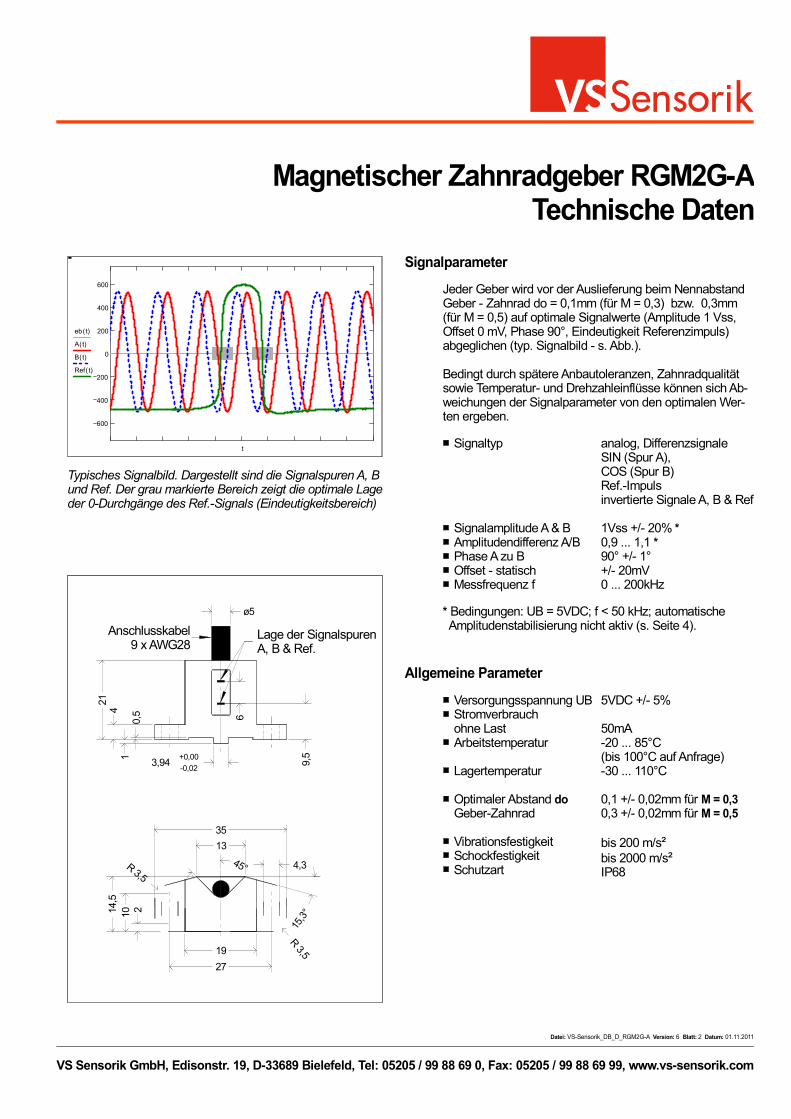
Jeder Geber wird vor der Auslieferung beim NennabstandGeber - Zahnrad do = 0,1mm (für M = 0,3) bzw. 0,3mm(für M = 0,5) auf optimale Signalwerte (Amplitude 1 Vss,Offset 0 mV, Phase 90°, Eindeutigkeit Referenzimpuls)abgeglichen (typ. Signalbild - s. Abb.).
Bedingt durch spätere Anbautoleranzen, Zahnradqualitätsowie Temperatur- und Drehzahleinflüsse können sich Ab-weichungen der Signalparameter von den optimalen Wer-ten ergeben.
analog, DifferenzsignaleSIN (Spur A),COS (Spur B)Ref.-Impulsinvertierte Signale A, B & Ref
1Vss +/- 20% *0,9 ... 1,1 *90° +/- 1°+/- 20mV0 ... 200kHz
Typisches Signalbild. Dargestellt sind die Signalspuren A, Bund Ref. Der grau markierte Bereich zeigt die optimale Lageder 0-Durchgänge des Ref.-Signals (Eindeutigkeitsbereich)
Versorgungsspannung UBStromverbrauchohne LastArbeitstemperatur
Lagertemperatur
Optimaler Abstand doGeber-Zahnrad
VibrationsfestigkeitSchockfestigkeitSchutzart
5VDC +/- 5%
50mA-20 ... 85°C(bis 100°C auf Anfrage)-30 ... 110°C
0,1 +/- 0,02mm für M = 0,30,3 +/- 0,02mm für M = 0,5
bis 200 m/s²bis 2000 m/s²IP68
600
400
200
0
200
400
600
eb t( )
A t( )
B t( )
Ref t( )
t
1335
4,3
27
R 3,5
R 3,5
21014,5
45°
19
0,5
14
21
3,94 +0,00-0,02 9,
5
6
* Bedingungen: UB = 5VDC; f < 50 kHz; automatische Amplitudenstabilisierung nicht aktiv (s. Seite 4).
15,3°
Anschlusskabel9 x AWG28
ø5
Lage der SignalspurenA, B & Ref.
Datei: VS-Sensorik_DB_D_RGM2G-A Version: 6 Blatt: 2 Datum: 01.11.2011
VS Sensorik GmbH, Edisonstr. 19, D-33689 Bielefeld, Tel: 05205 / 99 88 69 0, Fax: 05205 / 99 88 69 99, www.vs-sensorik.com
Magnetischer Zahnradgeber RGM2G-AMontage & Elektrischer Anschluss
Montage
Abstand Geber - Zahnrad d (Luftspalt)
Bei der Montage der Geber ist wie folgt vorzugehen:
1. Abstandslehre der entsprechenden Dicke doauf die Vorderseite des Gebers legen.
2. Den Geber mittels 2 Schrauben M4 fixieren - dabeidie Schrauben noch nicht fest anziehen. Der Gebersollte beweglich bleiben.
3. Den Geber leicht gegen das Zahnrad drücken. DieSchrauben wechselseitig festdrehen.
4. Nach dem Festschrauben des Gebers Abstandslehre(Abstandsfolie) nach oben entfernen.
do
do
44
Der optimale Abstand Geber - Zahnrad do beträgt:
0,1 +/- 0,02mm für Modul M = 0,3
0,3 +/- 0,02mm für Modul M = 0,5
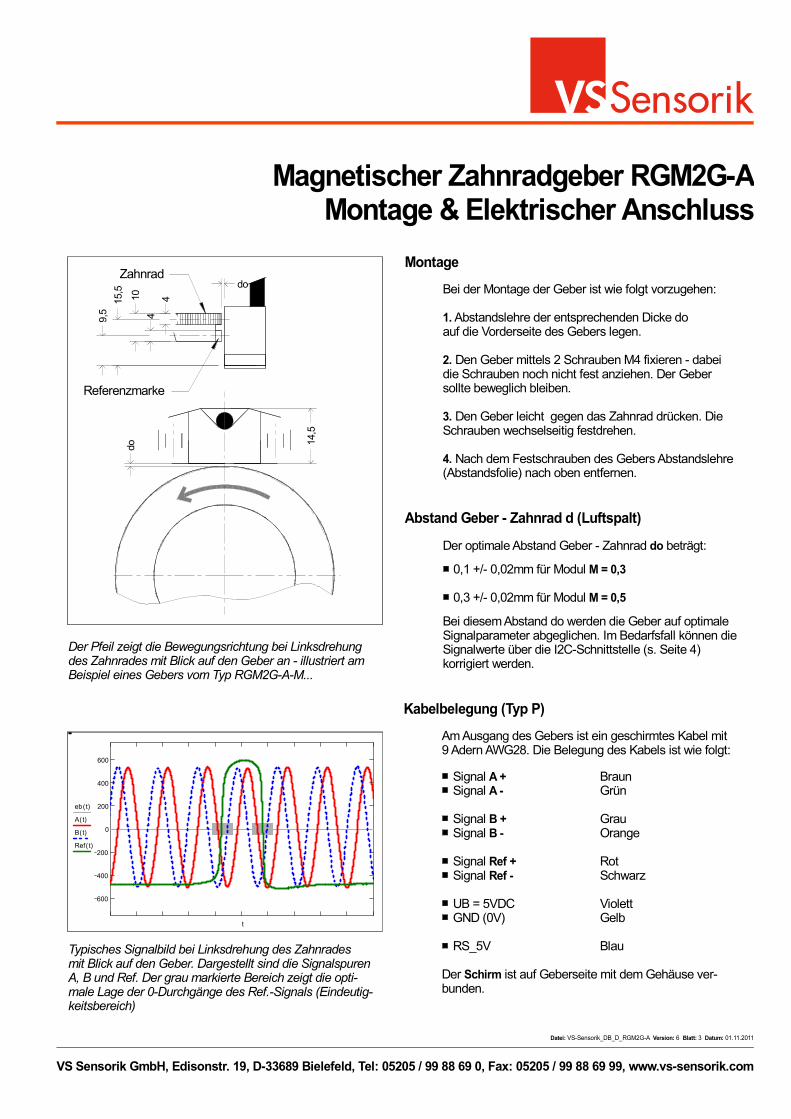
Zahnrad
Referenzmarke
Typisches Signalbild bei Linksdrehung des Zahnradesmit Blick auf den Geber. Dargestellt sind die SignalspurenA, B und Ref. Der grau markierte Bereich zeigt die opti-male Lage der 0-Durchgänge des Ref.-Signals (Eindeutig-keitsbereich)
Der Pfeil zeigt die Bewegungsrichtung bei Linksdrehungdes Zahnrades mit Blick auf den Geber an - illustriert amBeispiel eines Gebers vom Typ RGM2G-A-M...
Kabelbelegung (Typ P)
Signal A +Signal A -
Signal B +Signal B -
Signal Ref +Signal Ref -
UB = 5VDCGND (0V)
RS_5V
Am Ausgang des Gebers ist ein geschirmtes Kabel mit9 Adern AWG28. Die Belegung des Kabels ist wie folgt:
BraunGrün
GrauOrange
RotSchwarz
ViolettGelb
Blau
Der Schirm ist auf Geberseite mit dem Gehäuse ver-bunden.
Bei diesem Abstand do werden die Geber auf optimaleSignalparameter abgeglichen. Im Bedarfsfall können dieSignalwerte über die I2C-Schnittstelle (s. Seite 4)korrigiert werden.
600
400
200
0
200
400
600
eb t( )
A t( )
B t( )
Ref t( )
t
9,5
15,5
10
14,5
Datei: VS-Sensorik_DB_D_RGM2G-A Version: 6 Blatt: 3 Datum: 01.11.2011
VS Sensorik GmbH, Edisonstr. 19, D-33689 Bielefeld, Tel: 05205 / 99 88 69 0, Fax: 05205 / 99 88 69 99, www.vs-sensorik.com
Magnetischer Zahnradgeber RGM2G-AI2C-Schnittstelle
I2C-Schnittstelle
Automatische Amplitudenstabilisierung (Option)
Die I2C-Schnittstelle hilft bei Bedarf, eine Feineinstellungder Parameter Amplitude, Offset und Phase der Geber-signale A, B & Ref komfortabel vorzunehmen.
Alle RGM2G-Geber werden vor der Auslieferung mitviel Sorgfalt auf ein optimales Signalverhalten eingestellt.Ungeachtet dessen kann eine individuelle Feinkorrekturder Signalparameter gewünscht werden. Hierfür gibt eszwei Möglichkeiten:
1. Durch "feinfühliges" Verschieben des Gebers bezüglichseiner Position zum Zahnrad werden möglichst idealeSignalparameter eingestellt. Dieser Weg erfordert vielZeit und Erfahrung bei der Montage der Geber.
2. Nach der Montage der RGM2G-Geber auf den gefor-derten Abstand do zum Zahnrad wird die gewünschteFeinkorrektur der Gebersignale über die I2C-Schnitt-stelle zügig vorgenommen.
Die Signalelektronik des Geber bietet die Möglichkeit, dieAmplituden der Signale A & B auf einen Wert von 1Vss zustabilisieren. Dies hilft, Rundlauffehler der Achse oder desZahnrades auszugleichen.
Über die I2C-Schnittstelle kann die Amplitudenstabilisierungkonfiguriert werden.
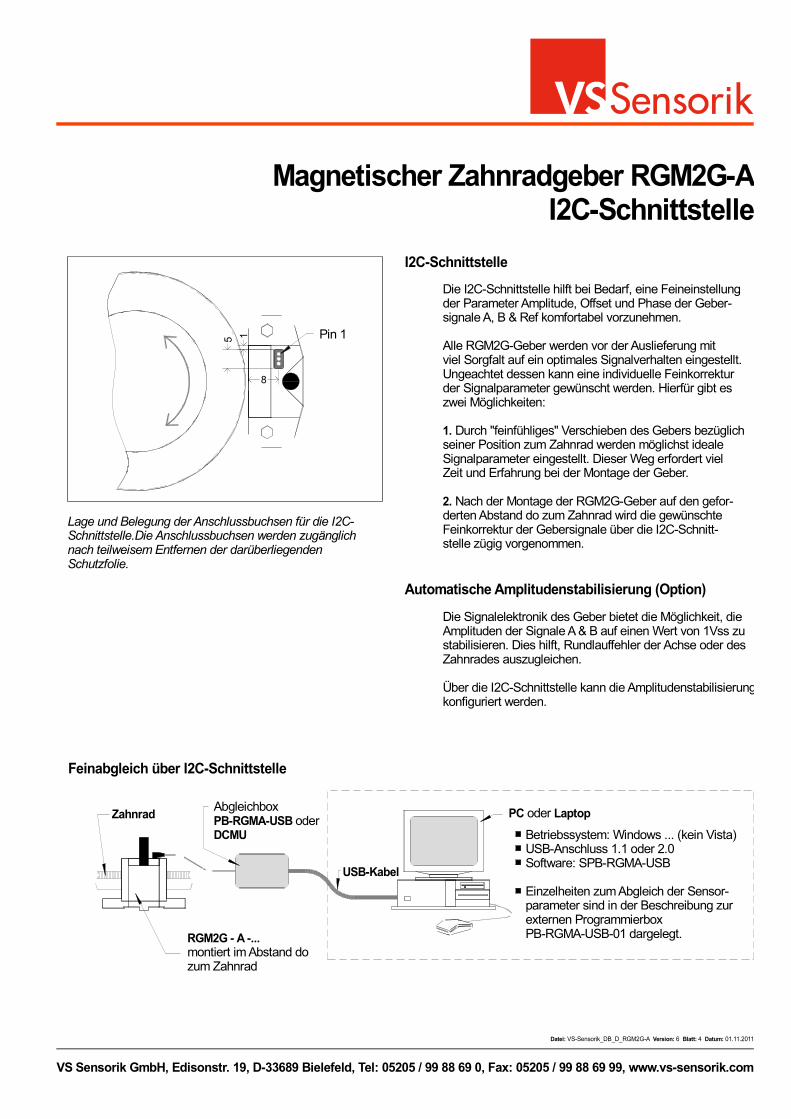
Feinabgleich über I2C-Schnittstelle
Zahnrad
RGM2G - A -...montiert im Abstand dozum Zahnrad
AbgleichboxPB-RGMA-USB oderDCMU
PC oder Laptop
Betriebssystem: Windows ... (kein Vista)USB-Anschluss 1.1 oder 2.0Software: SPB-RGMA-USB
Einzelheiten zum Abgleich der Sensor-parameter sind in der Beschreibung zurexternen ProgrammierboxPB-RGMA-USB-01 dargelegt.
USB-Kabel
Lage und Belegung der Anschlussbuchsen für die I2C-Schnittstelle.Die Anschlussbuchsen werden zugänglichnach teilweisem Entfernen der darüberliegendenSchutzfolie.
15 Pin 1
8
Datei: VS-Sensorik_DB_D_RGM2G-A Version: 6 Blatt: 4 Datum: 01.11.2011
VS Sensorik GmbH, Edisonstr. 19, D-33689 Bielefeld, Tel: 05205 / 99 88 69 0, Fax: 05205 / 99 88 69 99, www.vs-sensorik.com
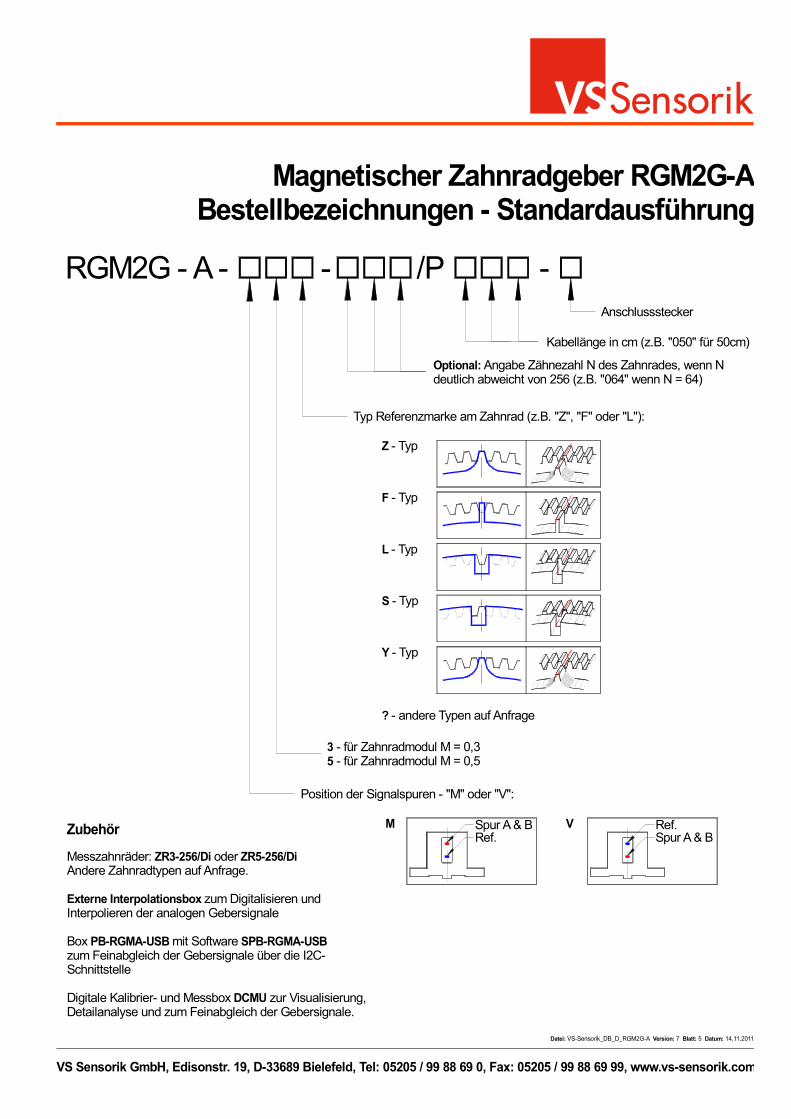
Magnetischer Zahnradgeber RGM2G-ABestellbezeichnungen - Standardausführung
Position der Signalspuren - "M" oder "V":
RGM2G - A - /P -Anschlussstecker
Kabellänge in cm (z.B. "050" für 50cm)
Typ Referenzmarke am Zahnrad (z.B. "Z", "F" oder "L"):
Z - Typ
3 - für Zahnradmodul M = 0,35 - für Zahnradmodul M = 0,5
M Spur A & BRef.
V Ref.Spur A & B
F - Typ
L - Typ
? - andere Typen auf Anfrage
-
Optional: Angabe Zähnezahl N des Zahnrades, wenn Ndeutlich abweicht von 256 (z.B. "064" wenn N = 64)
S - Typ
Zubehör
Messzahnräder: ZR3-256/Di oder ZR5-256/DiAndere Zahnradtypen auf Anfrage.
Externe Interpolationsbox zum Digitalisieren undInterpolieren der analogen Gebersignale
Box PB-RGMA-USB mit Software SPB-RGMA-USBzum Feinabgleich der Gebersignale über die I2C-Schnittstelle
Digitale Kalibrier- und Messbox DCMU zur Visualisierung,Detailanalyse und zum Feinabgleich der Gebersignale.
Y - Typ
Datei: VS-Sensorik_DB_D_RGM2G-A Version: 7 Blatt: 5 Datum: 14.11.2011
VS Sensorik GmbH, Edisonstr. 19, D-33689 Bielefeld, Tel: 05205 / 99 88 69 0, Fax: 05205 / 99 88 69 99, www.vs-sensorik.com
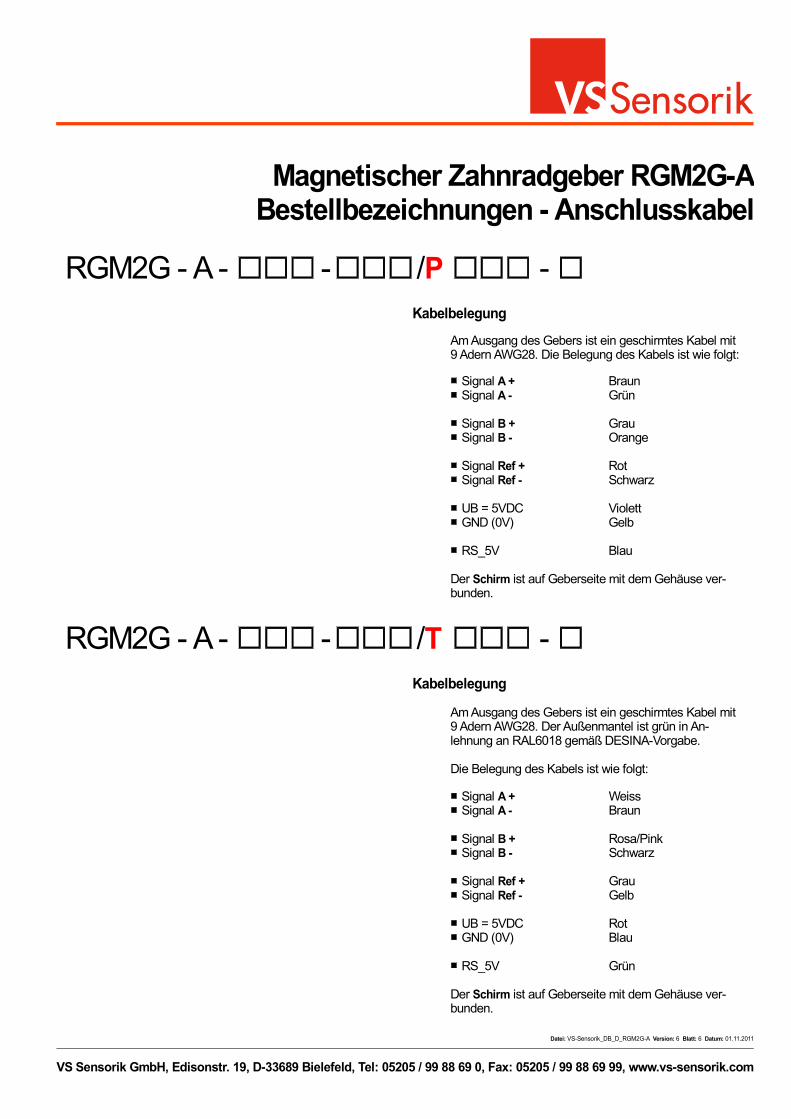
Magnetischer Zahnradgeber RGM2G-ABestellbezeichnungen - Anschlusskabel
Kabelbelegung
Signal A +Signal A -
Signal B +Signal B -
Signal Ref +Signal Ref -
UB = 5VDCGND (0V)
RS_5V
Am Ausgang des Gebers ist ein geschirmtes Kabel mit9 Adern AWG28. Die Belegung des Kabels ist wie folgt:
BraunGrün
GrauOrange
RotSchwarz
ViolettGelb
Blau
Der Schirm ist auf Geberseite mit dem Gehäuse ver-bunden.
Kabelbelegung
Signal A +Signal A -
Signal B +Signal B -
Signal Ref +Signal Ref -
UB = 5VDCGND (0V)
RS_5V
Am Ausgang des Gebers ist ein geschirmtes Kabel mit9 Adern AWG28. Der Außenmantel ist grün in An-lehnung an RAL6018 gemäß DESINA-Vorgabe.
Die Belegung des Kabels ist wie folgt:
WeissBraun
Rosa/PinkSchwarz
GrauGelb
RotBlau
Grün
Der Schirm ist auf Geberseite mit dem Gehäuse ver-bunden.
RGM2G - A - /P --
RGM2G - A - /T --
Datei: VS-Sensorik_DB_D_RGM2G-A Version: 6 Blatt: 6 Datum: 01.11.2011
VS Sensorik GmbH, Edisonstr. 19, D-33689 Bielefeld, Tel: 05205 / 99 88 69 0, Fax: 05205 / 99 88 69 99, www.vs-sensorik.com
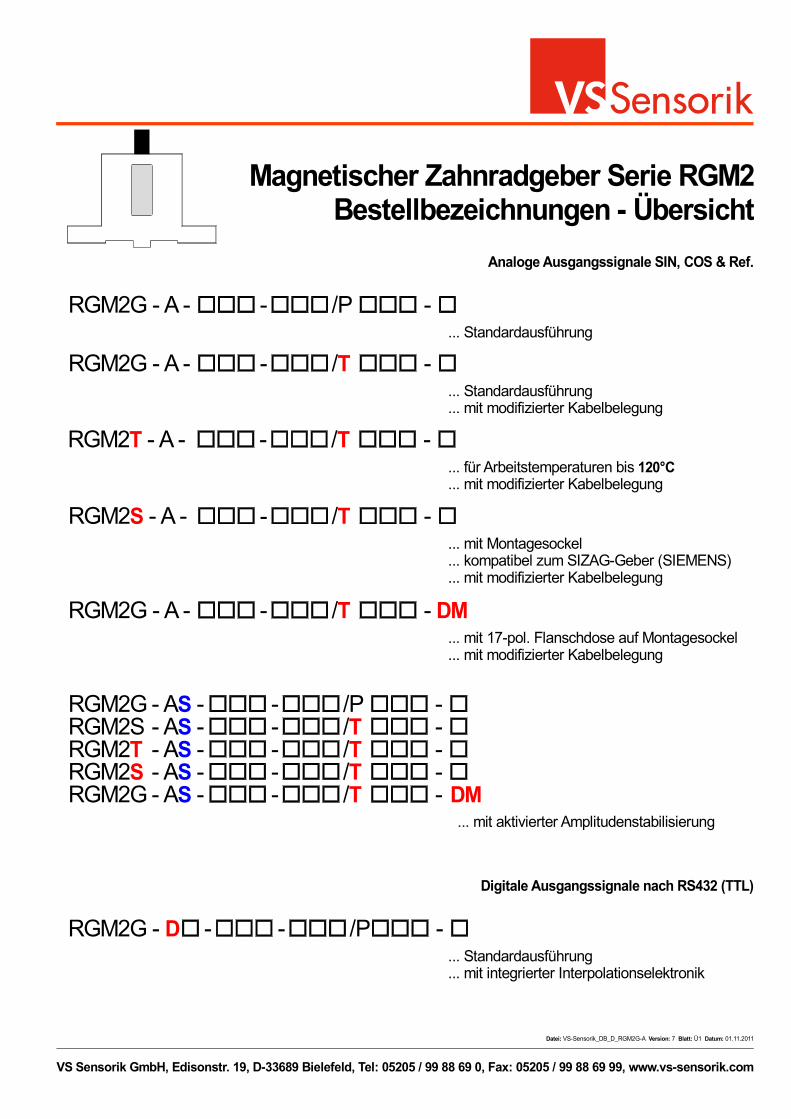
Magnetischer Zahnradgeber Serie RGM2Bestellbezeichnungen - Übersicht
... Standardausführung
... Standardausführung
... mit modifizierter Kabelbelegung
... für Arbeitstemperaturen bis 120°C
... mit modifizierter Kabelbelegung
... mit Montagesockel
... kompatibel zum SIZAG-Geber (SIEMENS)
... mit modifizierter Kabelbelegung
... mit 17-pol. Flanschdose auf Montagesockel
... mit modifizierter Kabelbelegung
... mit aktivierter Amplitudenstabilisierung
Analoge Ausgangssignale SIN, COS & Ref.
... Standardausführung
... mit integrierter Interpolationselektronik
Digitale Ausgangssignale nach RS432 (TTL)
DM
RGM2G - A - /P --
RGM2G - A - /T --
RGM2T - A - /T --
RGM2S - A - /T --
RGM2GRGM2SRGM2TRGM2S
- AS - /P --- AS - /T --- AS - /T --- AS - /T --
RGM2G - A - /T -- DM
RGM2G - AS - /T --
RGM2G - D /P ---
Datei: VS-Sensorik_DB_D_RGM2G-A Version: 7 Blatt: Ü1 Datum: 01.11.2011
VS Sensorik GmbH, Edisonstr. 19, D-33689 Bielefeld, Tel: 05205 / 99 88 69 0, Fax: 05205 / 99 88 69 99, www.vs-sensorik.com
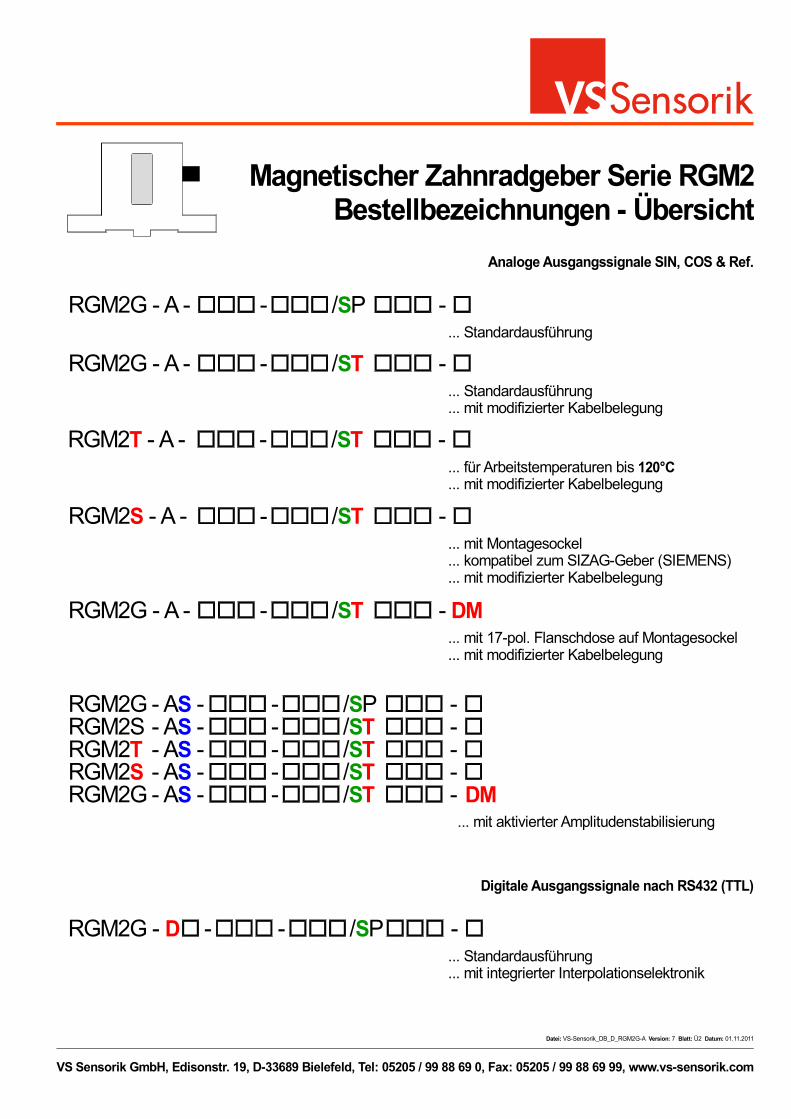
Magnetischer Zahnradgeber Serie RGM2Bestellbezeichnungen - Übersicht
... Standardausführung
... Standardausführung
... mit modifizierter Kabelbelegung
... für Arbeitstemperaturen bis 120°C
... mit modifizierter Kabelbelegung
... mit Montagesockel
... kompatibel zum SIZAG-Geber (SIEMENS)
... mit modifizierter Kabelbelegung
... mit 17-pol. Flanschdose auf Montagesockel
... mit modifizierter Kabelbelegung
... mit aktivierter Amplitudenstabilisierung
Analoge Ausgangssignale SIN, COS & Ref.
... Standardausführung
... mit integrierter Interpolationselektronik
Digitale Ausgangssignale nach RS432 (TTL)
DM
RGM2G - A - /SP --
RGM2G - A - /ST --
RGM2T - A - /ST --
RGM2S - A - /ST --
RGM2GRGM2SRGM2TRGM2S
- AS - /SP --- AS - /ST --- AS - /ST --- AS - /ST --
RGM2G - A - /ST -- DM
RGM2G - AS - /ST --
RGM2G - D /SP ---
Datei: VS-Sensorik_DB_D_RGM2G-A Version: 7 Blatt: Ü2 Datum: 01.11.2011
VS Sensorik GmbH, Edisonstr. 19, D-33689 Bielefeld, Tel: 05205 / 99 88 69 0, Fax: 05205 / 99 88 69 99, www.vs-sensorik.com
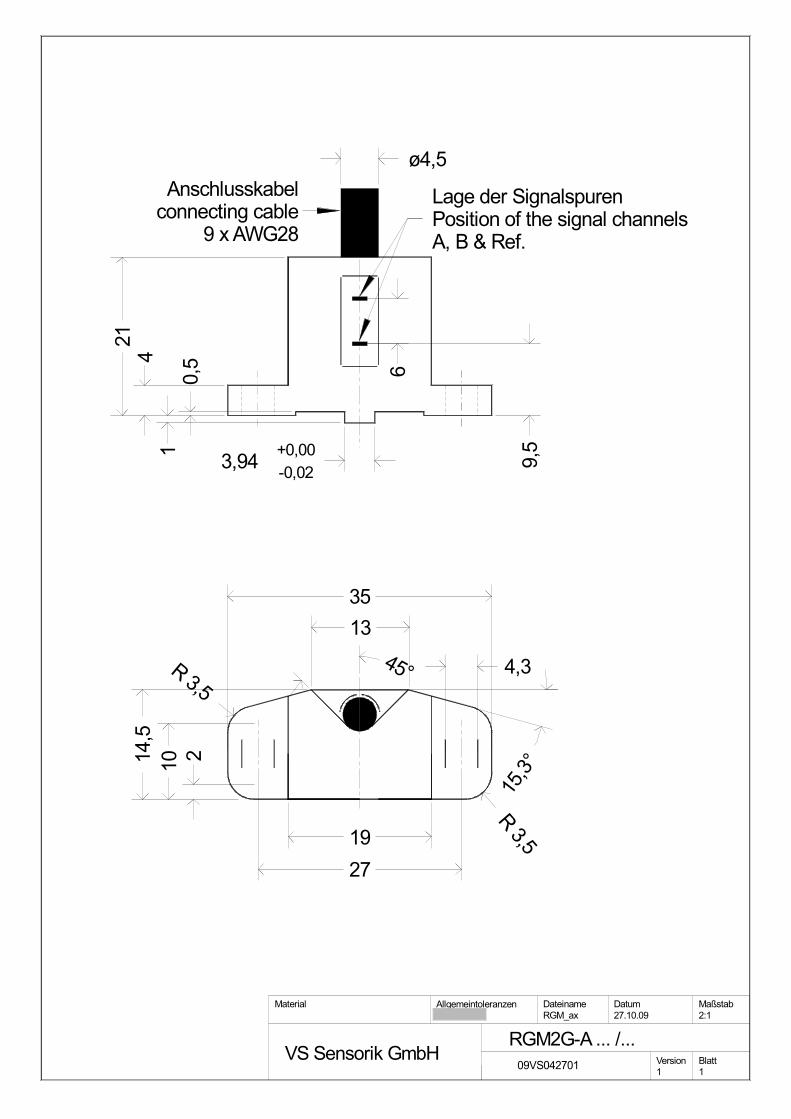
15,3°
Anschlusskabelconnecting cable
9 x AWG28
ø4,5
Lage der SignalspurenPosition of the signal channelsA, B & Ref.
Material
Version Blatt
MaßstabDatumDateiname
VS Sensorik GmbHRGM2G-A ... /...
09VS042701
RGM_ax 27.10.09 2:1
1 1
AllgemeintoleranzenISO 2768 - f
1335
4,3
27
R 3,5
R 3,5
21014,5
45°
19
0,5
14
21
3,94 +0,00-0,02 9,
5
6
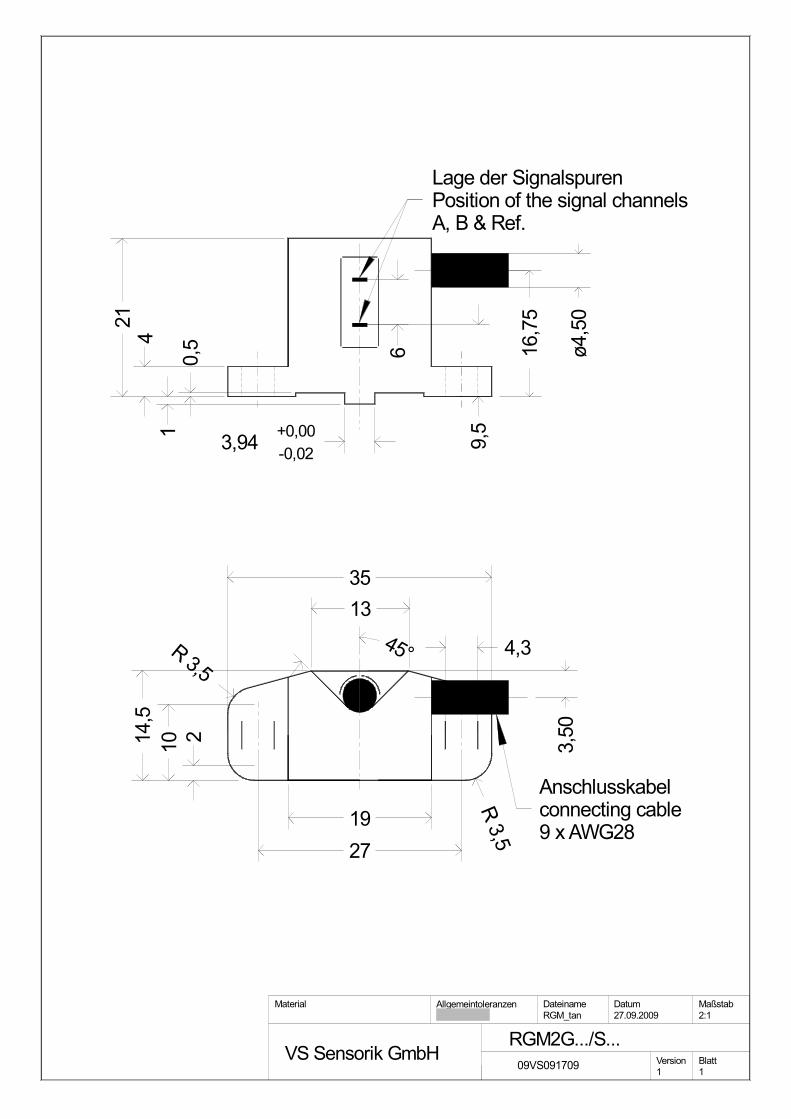
Lage der SignalspurenPosition of the signal channelsA, B & Ref.
Material
Version Blatt
MaßstabDatumDateiname
VS Sensorik GmbHRGM2G.../S...
09VS091709
RGM_tan 27.09.2009 2:1
1 1
AllgemeintoleranzenISO 2768 - f
1335
4,3
27
R 3,5
21014,5
45°
19
0,5
14
21
3,94 +0,00-0,02 9,
5
6 16,7
5
3,50
ø4,5
0
Anschlusskabelconnecting cable9 x AWG28
R 3,5
Related Documents











