Influence of environment on emerging chaos in Game of Choosing models W.KLONOWSKI, M.PIERZCHALSKI M.Nalecz Institute of Biocybernetics and Biomedical Engineering Polish Academy of Sciences 4 Trojdena St. 02-109 Warsaw POLAND [email protected] http://nbp.gbaf.eu/wklonowski Abstract: - Several examples of biologically inspired computational models of selection or election processes called Game of Choosing (GoC) are presented. Chaos can emerge due to multiple repetitions of simple iterations of GoC if the elements interact with environment. The state of the system after certain time period strongly depends on initial conditions and system parameters. A new procedure of comparing results of different processes including so called mixed processes is proposed. Key-Words: - econobiophysics, chaos, mating, elections, spin, environment 1 Introduction We have propose several models applicable to both selection and choosing processes when each subject has access to different information about the objects to choose from. We developed special software to simulate these processes. Dynamics of the choosers’/buyers’ preferences depends on interactions between individuals. We consider both the cases when the environment is neutral (natural process) as well as when the environment is involved (controlled process). In certain conditions if interactions are sufficiently strong chaos may appear in the considered systems ([1], cf. [2], [3]). Our simulations demonstrate that if initially a subject has even very small preference towards certain object then, if information passed on by a direct or indirect object’s exposition (presentation of the object) exerts a favorable impact on the subject, it is enough to repeat the exposition again and again to cause that the subject will choose this object. If information about the object passed on by an exposition exerts an adverse impact then the subject will not choose this object. Initial preferences may be reversed if the impact of subsequent expositions changes due to influence of the environment. Our models were biologically inspired – we began with modeling of sexual partners’ mating process. But then we were pleased to note that some of our models may work for example with Google advertising – if a user has shown for example interest about Portugal, Google with each searching or opening of Gmail will display information like ‘Big discounts for flights to Portugal’, ‘Thousands cheap hotels in Portugal’ etc. If a user has shown interests about Greece, Google will display similar kind of information about Greece, etc. Such a model is also the very base of political propaganda, in particular during elections. Each of the considered models may have a ‘monogamic’ and a ‘polygamic’ variant. 2 Models We consider a system consisting of two classes of elements – a class S of subjects that are active, that is they can make decisions to choose elements they somehow prefer from another class O of objects. Objects are passive i.e. they can only compete to be chosen. Subjects and objects are embedded in a much greater space called environment, E. We assume that neighboring elements of the given element under consideration also belong to its environment and may exert an influence on this element. Let us assume that the class S consists of N subjects A,B, C, ... and the class of objects O consists of M objects that may be subdivided into R subclasses α, β , γ, ... with i m objects belonging to the r-th subclass (r = 1, ... , j r ) - j 1 objects a belonging to the subclass α, j 2 objects b belonging to the subclass β , etc. In the simplest case each subclass consists of only one object. Subjects’ preferences are given in the form of preference matrix P = [p mn ] where the element p mn denotes preference of the n-th subject towards the m-th subclass of objects. We call the process in the considered system the Game of Choosing, GoC. GoC is characterized by Recent Researches in Automatic Control, Systems Science and Communications ISBN: 978-1-61804-103-6 23

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Influence of environment on emerging chaos in Game of Choosing models
W.KLONOWSKI, M.PIERZCHALSKI
M.Nalecz Institute of Biocybernetics and Biomedical Engineering Polish Academy of Sciences
4 Trojdena St. 02-109 Warsaw POLAND
[email protected] http://nbp.gbaf.eu/wklonowski Abstract: - Several examples of biologically inspired computational models of selection or election processes called Game of Choosing (GoC) are presented. Chaos can emerge due to multiple repetitions of simple iterations of GoC if the elements interact with environment. The state of the system after certain time period strongly depends on initial conditions and system parameters. A new procedure of comparing results of different processes including so called mixed processes is proposed. Key-Words: - econobiophysics, chaos, mating, elections, spin, environment
1 Introduction We have propose several models applicable to both selection and choosing processes when each subject has access to different information about the objects to choose from. We developed special software to simulate these processes. Dynamics of the choosers’/buyers’ preferences depends on interactions between individuals. We consider both the cases when the environment is neutral (natural process) as well as when the environment is involved (controlled process). In certain conditions if interactions are sufficiently strong chaos may appear in the considered systems ([1], cf. [2], [3]).
Our simulations demonstrate that if initially a subject has even very small preference towards certain object then, if information passed on by a direct or indirect object’s exposition (presentation of the object) exerts a favorable impact on the subject, it is enough to repeat the exposition again and again to cause that the subject will choose this object. If information about the object passed on by an exposition exerts an adverse impact then the subject will not choose this object. Initial preferences may be reversed if the impact of subsequent expositions changes due to influence of the environment.
Our models were biologically inspired – we began with modeling of sexual partners’ mating process. But then we were pleased to note that some of our models may work for example with Google advertising – if a user has shown for example interest about Portugal, Google with each searching or opening of Gmail will display information like ‘Big discounts for flights to Portugal’, ‘Thousands cheap hotels in Portugal’ etc.
If a user has shown interests about Greece, Google will display similar kind of information about Greece, etc. Such a model is also the very base of political propaganda, in particular during elections. Each of the considered models may have a ‘monogamic’ and a ‘polygamic’ variant.
2 Models We consider a system consisting of two classes of elements – a class S of subjects that are active, that is they can make decisions to choose elements they somehow prefer from another class O of objects. Objects are passive i.e. they can only compete to be chosen. Subjects and objects are embedded in a much greater space called environment, E. We assume that neighboring elements of the given element under consideration also belong to its environment and may exert an influence on this element.
Let us assume that the class S consists of N subjects A,B, C, ... and the class of objects O consists of M objects that may be subdivided into R subclasses α, β , γ, ... with im objects belonging to the r-th subclass (r = 1, ... , jr) - j1 objects a belonging to the subclass α, j2 objects b belonging to the subclass β , etc. In the simplest case each subclass consists of only one object.
Subjects’ preferences are given in the form of preference matrix P = [pmn] where the element pmn denotes preference of the n-th subject towards the m-th subclass of objects.
We call the process in the considered system the Game of Choosing, GoC. GoC is characterized by
Recent Researches in Automatic Control, Systems Science and Communications
ISBN: 978-1-61804-103-6 23
( ) ( ) ( )titp=+tp mnmnmn ∗1
hg
tpi
=tpl+nk,+m
a
a=k
b
b=ll+nk,+m
mn *
)(
)1(
∗+
∑ ∑− −
discrete time, t , that counts number of rounds (iterations) of the GoC from the initial moment. Each round means exposition of the objects to the subjects while periods between the subsequent rounds may differ from one another. Exposition may be direct (one may say sensorial) presentation of the object to the subject or it may be just a transmission of information about the object to the subjects through the environment, for example presentation of a TV spot. For a subject to win GoC means to choose the most preferred object before other subjects would do this or to choose more objects than other subjects during the same period of time. For an object to win GoC means to be chosen before other objects.
Subjects and objects exchange information through environment. The environment may be neutral, i.e. it does not influence transmitted information; in such a case we call the process natural GoC as for example when choosing a mating partner. The environment may also be active, i.e. it can somehow transform information it transmits; in such a case we call it controlled GoC as for example when choosing a product based on information added by Google every time one searches the web or uses Gmail or when one elects MPs influenced by public relation propaganda.
Subjects’ preferences are equal to probability of choosing given object multiplied by 100. If pmn =50 it means ’50-50’ situation, that is equal probability of choosing and of rejecting object m by subject n. If pmn = pt = 80 it means that probability of choosing the object is four-times greater than probability of rejecting it. This will be our threshold i.e. if pmn becomes greater than pt it means that the subject n did choose the object m; if pmn becomes smaller than (1 - pt ) it means that the subject n did rejected the object m.
In the beginning we initialize preference matrix P with values close to 50, between 49 and 51, i.e. all subjects have very similar preferences to all objects but some preferences are slightly greater than others. We assume that the influence of the objects on the subjects is expressed in the form of the impact matrix I = [imn] where the element imn denotes influence of one exposition of the m-th object on the preference of the n-th subject towards this object. And the evolution of the system in time is given by
(1)
that is by multiplying element by element (not multiplication of the matrices!), where t denotes the number of rounds of GoC. If imn(t) > 1 it means that the t - th exposition causes increase of the
preference of the subject n towards the object m; if imn(t) < 1 the exposition causes decrease of the preference. If imn(t) = 1 it means that the exposition does not change the preference of the n-th subject towards the m-th object, what is equivalent to the assertion that the m-th object was not at all exposed to the n-th subject in the round t . It makes it possible to adopt an approach that all objects are exposed to all subjects during each round of GoC. So, the state of the system after t rounds of GoC depends on subjects’ initial preferences as well as on the impact matrix and its evolution in time. For simplicity we will assume that the impact matrix does not change with time, only the preference matrix does. We consider also GoC with interaction between subjects. The values of preference matrix for subject n change depending on the preferences of the nearest neighbours subjects and the evolution of the system in time instead by Eq. (1) is given by (2) where a = (g-1)/2 and b = (h-1)/2; g*h is the size of mask defining the nearest neighbors; k=l=0 corresponds to the considered element (cf. [4]). We speak about matrices but we consider the elements as they were placed on toroidal surfaces rather than on flat tables so that each elements has four nearest neighbors - ‘left’, ‘right’, ‘up’ and ‘down’ neighbor. In our monogamic models at the moment when some preference pmn exceeds the threshold pt that is when the subject n chooses the object m the object stops to take part in the GoC while the subject n may not choose any more objects but stays in the game and may influence preferences of other subjects. In our polygamic models when the preference pmn exceeds the threshold pt the object m stops to take part in the GoC while the subject n stays in the game and may choose more subjects when the game continues (cf. [1]-[3]). But more complicated models also exist. In elections each candidate is ‘cloned’ into a whole subclass of ballot papers and may be chosen by many voters. Similarly, it is possible to have both the spouse and a lover or even several lovers. Or one person may possess several cars and one car may belong to more than one owner etc. That is if the game last sufficiently long time each subject might choose more than one object and each object might be chosen by more than one subject.
Recent Researches in Automatic Control, Systems Science and Communications
ISBN: 978-1-61804-103-6 24
We consider several variants of GoC. Our models may be applied both in biomedical systems as well as in socio-economical systems. By analogy to econophysics we will call it econobiophysics.
3 Emergence of chaos We distinguish the first-order and the second-order models. The first-order models evolve according to Eq. (1) while the second-order models according to Eq. (2). For simplicity we consider here only interactions between two nearest neighbor subjects (evolution given by Eq.(2) with g=1. h=3). To make it possible to compare results the number of rounds of each GoC was fixed to be equal 600. Both first- and second-order models may be either monogamic or polygamic. We observe different models behaviors while changing model initial condition. First-order models are not very sensitive to initial conditions. Second-order monogamic models are the most sensitive among those studied here. When studying the model’s sensitivity to initial conditions we change elements in the impact matrix I or in the preference matrix P. We change the impact matrix by making some elements imn inactive that is to be equal exactly 1. In the first-order model evolution the elements in the preference matrix pmn corresponding to inactive imn elements do not change. In the second-order models’ evolution pmn values change also because of interactions with the nearest neighbors. But we can keep some pmn constant during the whole GoC, such elements of the preference matrix will be called insensitive.
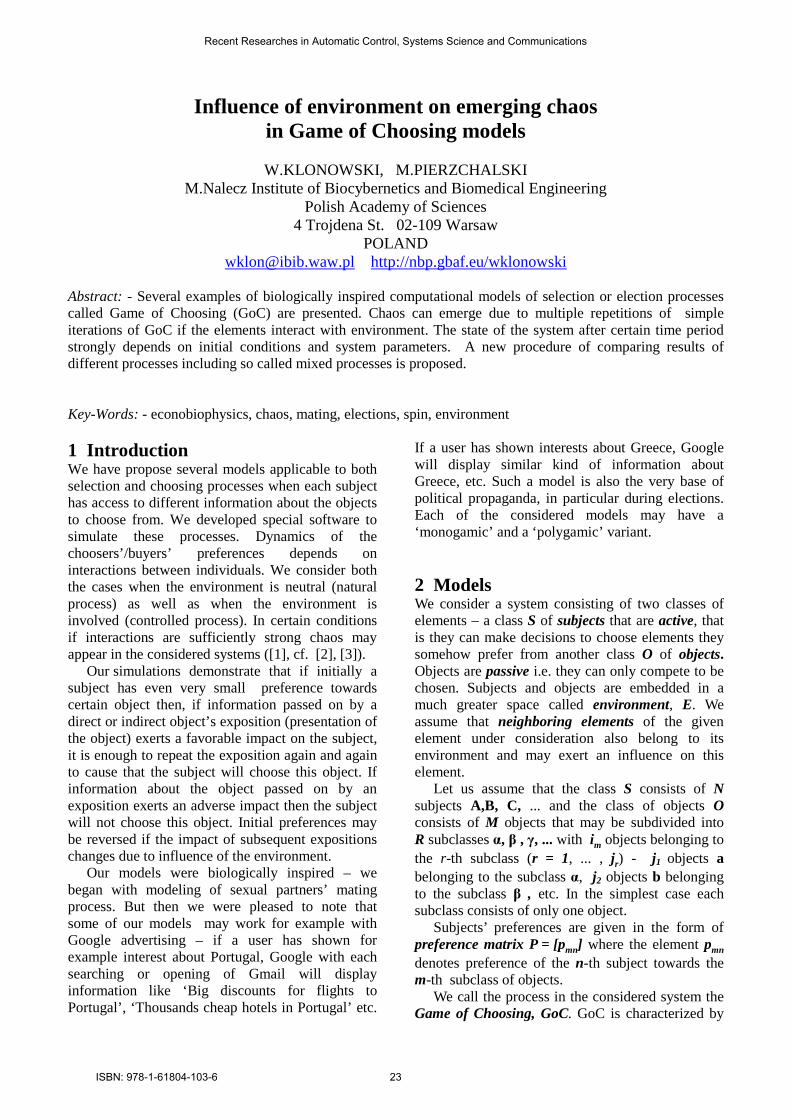
Fig.1. Example of a preference matrix at the initial moment of the game
In rows there are objects and in columns there
are subjects. Matrix element is black if the subject is positive towards the object i.e. if the preference pmn is greater than 50, otherwise it is white. The starting point of the game is chosen randomly. In the examples given below the game starts from the
element (1,1). The figures show the results of GoC (after 600 rounds). The black colour of a sell means that the subject has chosen the given object before the game ended; the gray colour means that the subject has rejected the given object, the white colour means that the subject has not decided about the given object.
Values of the elements of the impact matrix I were chosen in such a way that if the initial value of element pmn is greater than 50 then the initial value of the corresponding element imn got the value greater than 1. In the initial preference matrix there are the same numbers of values above and below 50; similarly, in the initial impact matrix there are the same number of values above and below 1. In the beginning we initialize the preference matrix P with values close to 50, between 49 and 51. and the impact matrix with values close to 1 – between 0.99 and 1.01.
3.1 Simple models In GoC one may observe chaotic behavior - very
small changes of initial values of only few elements of the matrix P or of the matrix I may lead to quite big differences in the outcome of GoC due to the iterative character of time evolution of the system. Here are some examples – we give here only values of these elements that we change. Each row of the matrices P and I will correspond to a given subclass of objects rather than to a single object. But for simplicity we here assume that the values of corresponding elements are the same for all objects belonging to the given subclass.
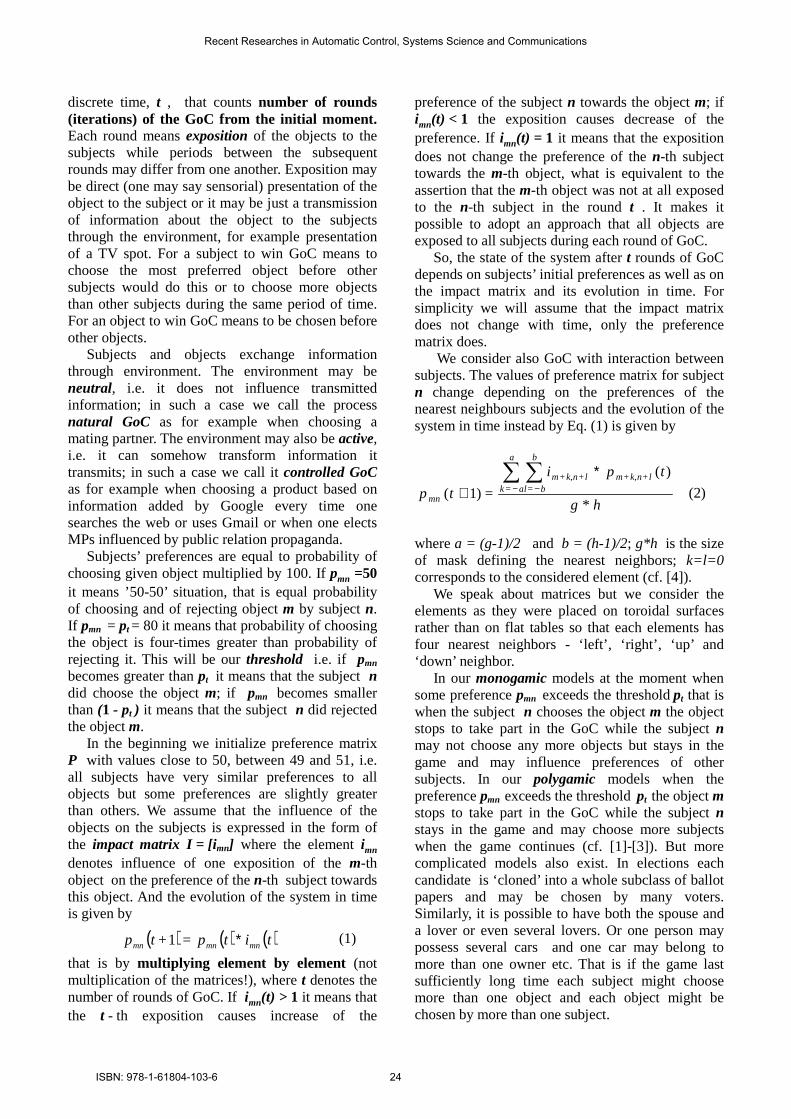
For the second-order monogamic model with two nearest neighbor influence and the number of objects in each subclass at least equal to the number of subjects after 600 rounds of GoC most of subjects would choose objects from subclass 3. (Fig. 2a) when initially in the preference matrix element p3,1 was equal 50.894 and the first elements of the 3rd row of the impact matrix were
;=n,,=i n
1,2...7159}00471,1.001.00811,1.540894,1.005.00341,1.0{0.99778,13,
If in the preference matrix the element p3,1 will be made insensitive then most of the subjects would choose objects from subclass 9. instead (Fig. 2b). Similarly, if we make those seven elements of the impact matrix inactive (equal exactly 1) then most of subjects would also choose objects from subclass 9. (Fig. 2c). Such model may also work for election process when candidates are ‘cloned’ into ballot papers.
Recent Researches in Automatic Control, Systems Science and Communications
ISBN: 978-1-61804-103-6 25
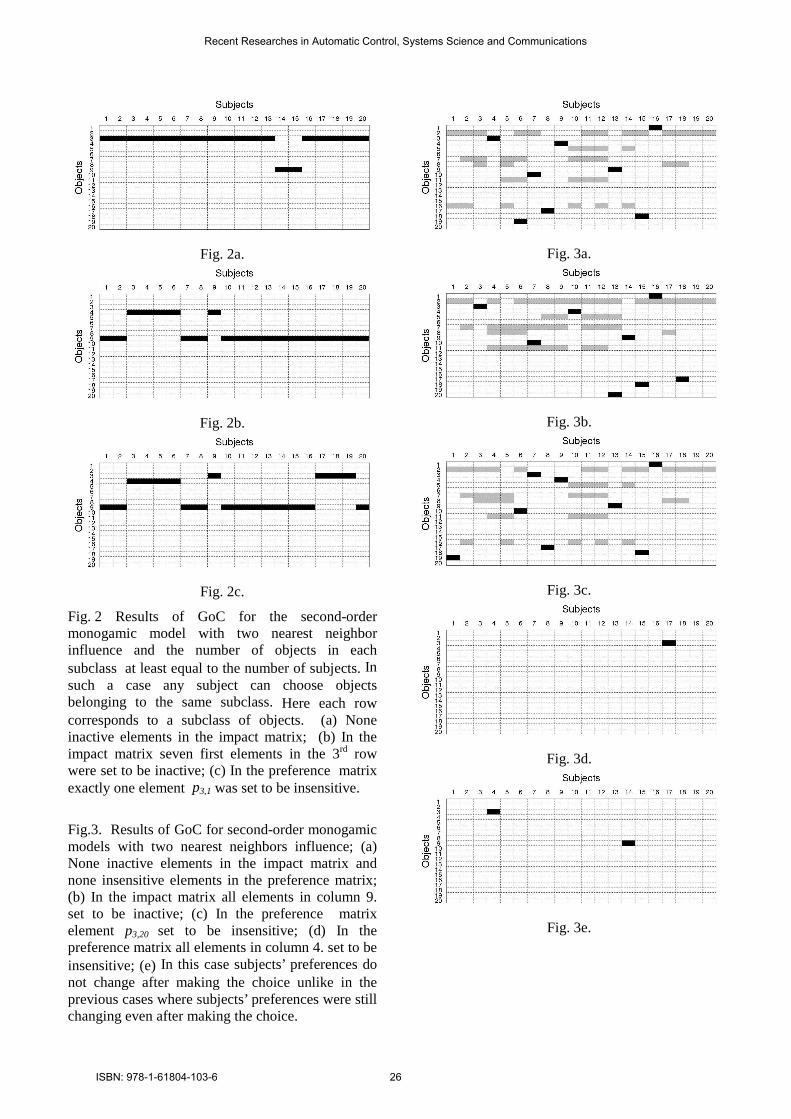
Fig. 2a.
Fig. 2b.
Fig. 2c.
Fig. 2 Results of GoC for the second-order monogamic model with two nearest neighbor influence and the number of objects in each subclass at least equal to the number of subjects. In such a case any subject can choose objects belonging to the same subclass. Here each row corresponds to a subclass of objects. (a) None inactive elements in the impact matrix; (b) In the impact matrix seven first elements in the 3rd row were set to be inactive; (c) In the preference matrix exactly one element p3,1 was set to be insensitive.
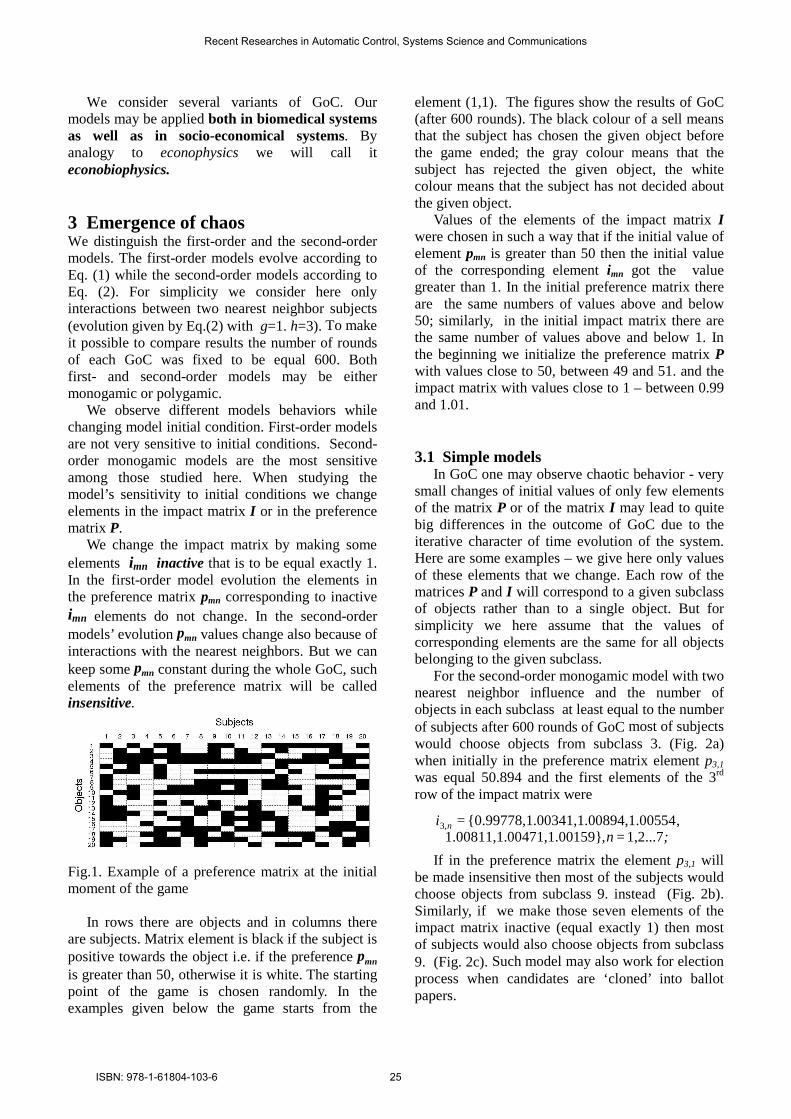
Fig.3. Results of GoC for second-order monogamic models with two nearest neighbors influence; (a) None inactive elements in the impact matrix and none insensitive elements in the preference matrix; (b) In the impact matrix all elements in column 9. set to be inactive; (c) In the preference matrix element p3,20 set to be insensitive; (d) In the preference matrix all elements in column 4. set to be insensitive; (e) In this case subjects’ preferences do not change after making the choice unlike in the previous cases where subjects’ preferences were still changing even after making the choice.
Fig. 3a.
Fig. 3b.
Fig. 3c.
Fig. 3d.
Fig. 3e.
Recent Researches in Automatic Control, Systems Science and Communications
ISBN: 978-1-61804-103-6 26
For a similar model, but with each subclass consisting of only one element. subject 4. would choose object 3. (Fig. 3a) when the values for column 9. of the impact matrix were
1,2...200.99691}5872,1.005300725,0.990.99003,1.4484,0.992500193,0.991.00084,1.5697,0.998500681,1.001.00500,1.2428,0.990499213,1.001.00491,0.
0134.00571,1.0{1.00919,1,9
=m,
,,,
,=i m
If in the impact matrix all these elements in column 9. were set to be inactive then the same subjects 4. would not make the choice but would reject four objects – 2. and 7. and 8. and 11. (Fig. 3b).
If in the preference matrix only one element p3,20 = 50.312 was instead made insensitive then subject 4. would behave similarly like in the previous case (Fig. 3c).
The initial values for column 4. of the preference matrix were
1,2...2050.248}38150.964,49.80149.373,49.779,50..309,49.712,49525,49.56849.830,49..758,49.165,49877,49.57949.679,49.
4,50.214.111,50.55{49.964,50
=m,,,,,=pm4
If all those elements were set to be insensitive then only subject 17. would make choice (Fig. 3d.).
a.
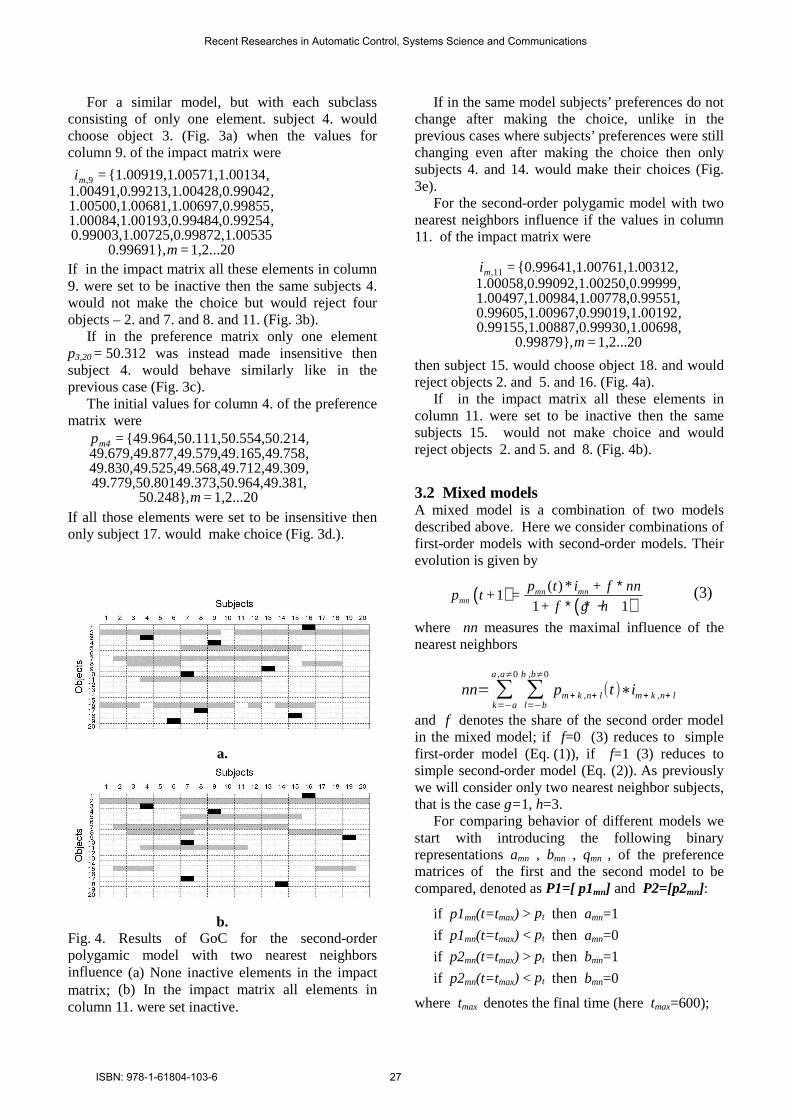
b. Fig. 4. Results of GoC for the second-order polygamic model with two nearest neighbors influence (a) None inactive elements in the impact matrix; (b) In the impact matrix all elements in column 11. were set inactive.
If in the same model subjects’ preferences do not change after making the choice, unlike in the previous cases where subjects’ preferences were still changing even after making the choice then only subjects 4. and 14. would make their choices (Fig. 3e).
For the second-order polygamic model with two nearest neighbors influence if the values in column 11. of the impact matrix were
1,2...200.99879}8930,1.006900887,0.990.99155,1.2019,1.001900967,0.990.99605,1.1778,0.995500984,1.001.00497,1.9250,0.999999092,1.001.00058,0.
0312.00761,1.0{0.99641,1,11
=m,,,,,,=i m
then subject 15. would choose object 18. and would reject objects 2. and 5. and 16. (Fig. 4a).
If in the impact matrix all these elements in column 11. were set to be inactive then the same subjects 15. would not make choice and would reject objects 2. and 5. and 8. (Fig. 4b).
3.2 Mixed models A mixed model is a combination of two models described above. Here we consider combinations of first-order models with second-order models. Their evolution is given by
( ) ( )( ) *
11 1mn mn
mn
p t i + f nnp t + =
+ f g h
∗∗ ∗ −
(3)
where nn measures the maximal influence of the nearest neighbors
nn= ∑k=−a
a,a≠0
∑l=−b
b ,b≠0
pm+ k ,n+ l (t )∗im+ k ,n+ l
and f denotes the share of the second order model in the mixed model; if f=0 (3) reduces to simple first-order model (Eq. (1)), if f=1 (3) reduces to simple second-order model (Eq. (2)). As previously we will consider only two nearest neighbor subjects, that is the case g=1, h=3.
For comparing behavior of different models we start with introducing the following binary representations amn , bmn , qmn , of the preference matrices of the first and the second model to be compared, denoted as P1=[ p1mn] and P2=[p2mn]:
if p1mn(t=tmax) > pt then amn=1
if p1mn(t=tmax) < pt then amn=0
if p2mn(t=tmax) > pt then bmn=1
if p2mn(t=tmax) < pt then bmn=0
where tmax denotes the final time (here tmax=600);
Recent Researches in Automatic Control, Systems Science and Communications
ISBN: 978-1-61804-103-6 27
the difference between the numbers of iterations necessary for the given subject to make the choice (these numbers are kept in computer memory in a special matrix) in the first (t1mn) and in the second model (t2mn) to be compared has fallowing binary representation (qmn):
if |t1mn – t2mn| > 0 then qmn=1
if t1mn – t2mn = 0 then qmn=0
Using these binary representations we define the difference factor, diff
(4)
The ‘global’ difference between preference matrices P1 and P2 characterized by the difference factor diff consists of two kinds of ‘individual’ differences. Those are so called ‘position differences’ - when in P1 given subject chooses different object than in P2, and so called ‘iteration differences’ - when in P1 and P2 the same subject chooses the same object but the numbers of iterations necessary to make the choice are different.
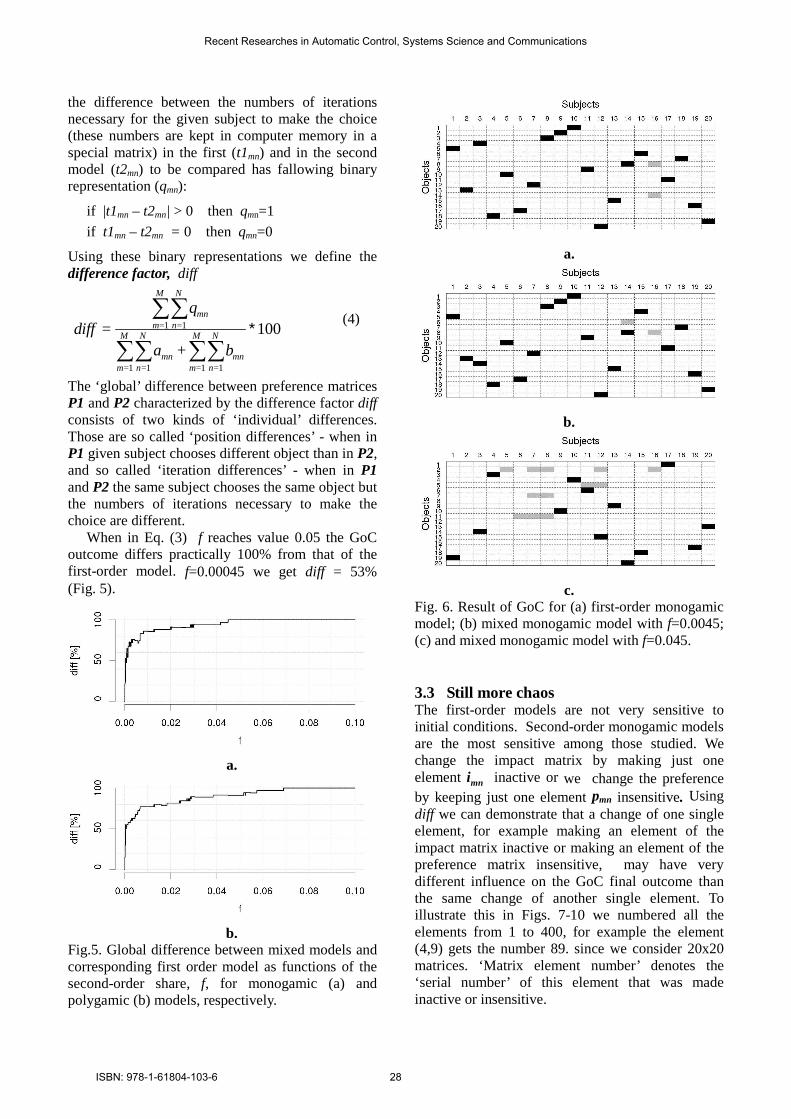
When in Eq. (3) f reaches value 0.05 the GoC outcome differs practically 100% from that of the first-order model. f=0.00045 we get diff = 53% (Fig. 5).
a.
b.
Fig.5. Global difference between mixed models and corresponding first order model as functions of the second-order share, f, for monogamic (a) and polygamic (b) models, respectively.
a.
b.
c.
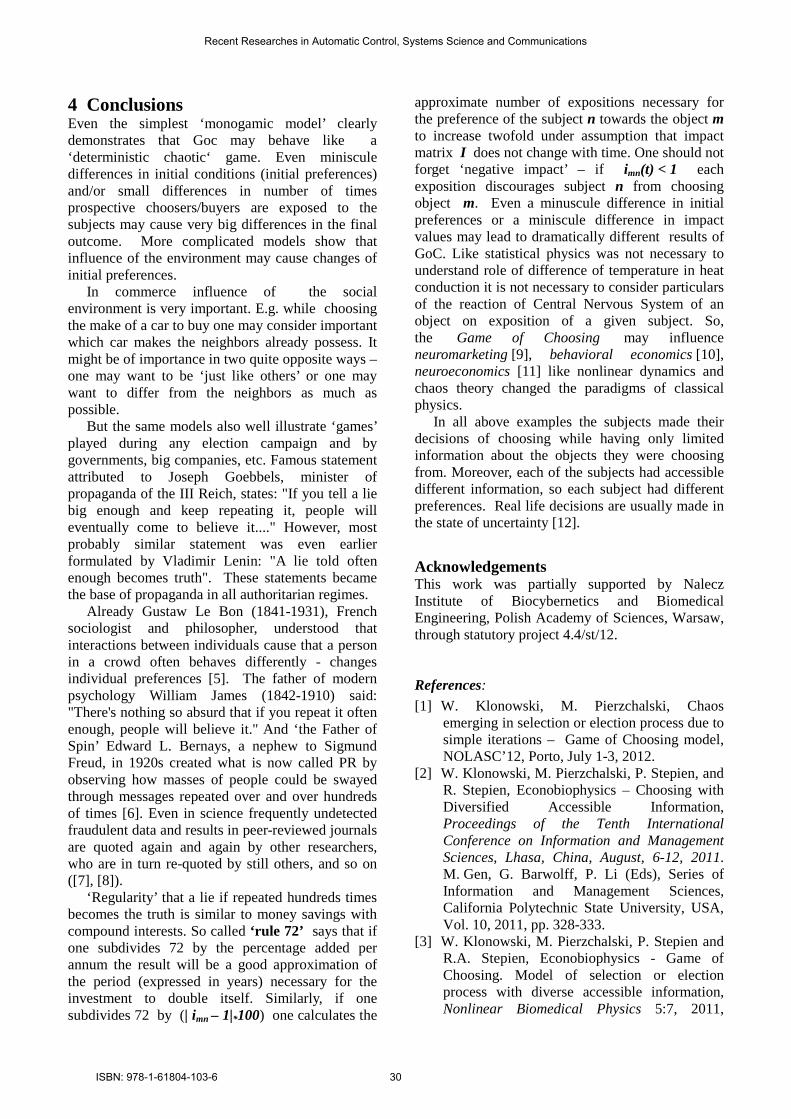
Fig. 6. Result of GoC for (a) first-order monogamic model; (b) mixed monogamic model with f=0.0045; (c) and mixed monogamic model with f=0.045. 3.3 Still more chaos The first-order models are not very sensitive to initial conditions. Second-order monogamic models are the most sensitive among those studied. We change the impact matrix by making just one element imn inactive or we change the preference by keeping just one element pmn insensitive. Using diff we can demonstrate that a change of one single element, for example making an element of the impact matrix inactive or making an element of the preference matrix insensitive, may have very different influence on the GoC final outcome than the same change of another single element. To illustrate this in Figs. 7-10 we numbered all the elements from 1 to 400, for example the element (4,9) gets the number 89. since we consider 20x20 matrices. ‘Matrix element number’ denotes the ‘serial number’ of this element that was made inactive or insensitive.
1 1
1 1 1 1
100
M N
mnm= n=
M N M N
mn mnm= n= m= n=
qdiff =
a + b∗
∑∑
∑∑ ∑∑
Recent Researches in Automatic Control, Systems Science and Communications
ISBN: 978-1-61804-103-6 28
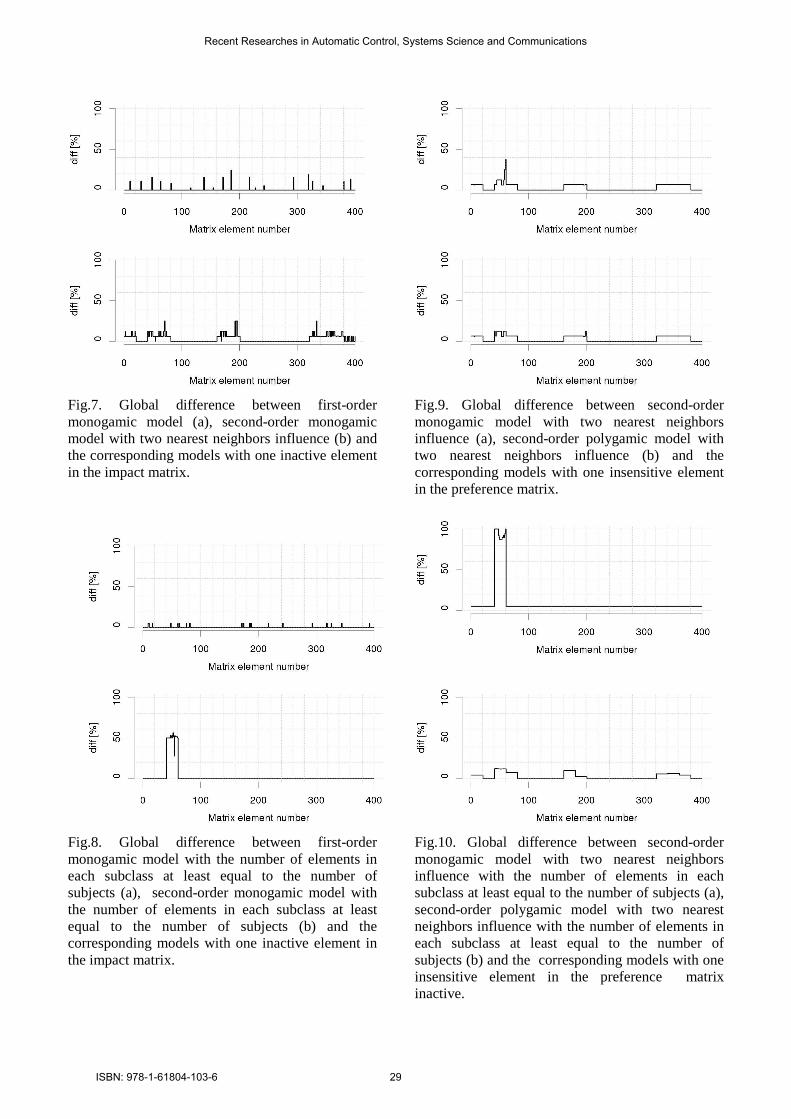
Fig.7. Global difference between first-order monogamic model (a), second-order monogamic model with two nearest neighbors influence (b) and the corresponding models with one inactive element in the impact matrix.
Fig.8. Global difference between first-order monogamic model with the number of elements in each subclass at least equal to the number of subjects (a), second-order monogamic model with the number of elements in each subclass at least equal to the number of subjects (b) and the corresponding models with one inactive element in the impact matrix.
Fig.9. Global difference between second-order monogamic model with two nearest neighbors influence (a), second-order polygamic model with two nearest neighbors influence (b) and the corresponding models with one insensitive element in the preference matrix.
Fig.10. Global difference between second-order monogamic model with two nearest neighbors influence with the number of elements in each subclass at least equal to the number of subjects (a), second-order polygamic model with two nearest neighbors influence with the number of elements in each subclass at least equal to the number of subjects (b) and the corresponding models with one insensitive element in the preference matrix inactive.
Recent Researches in Automatic Control, Systems Science and Communications
ISBN: 978-1-61804-103-6 29
4 Conclusions Even the simplest ‘monogamic model’ clearly demonstrates that Goc may behave like a ‘deterministic chaotic‘ game. Even miniscule differences in initial conditions (initial preferences) and/or small differences in number of times prospective choosers/buyers are exposed to the subjects may cause very big differences in the final outcome. More complicated models show that influence of the environment may cause changes of initial preferences. In commerce influence of the social environment is very important. E.g. while choosing the make of a car to buy one may consider important which car makes the neighbors already possess. It might be of importance in two quite opposite ways – one may want to be ‘just like others’ or one may want to differ from the neighbors as much as possible. But the same models also well illustrate ‘games’ played during any election campaign and by governments, big companies, etc. Famous statement attributed to Joseph Goebbels, minister of propaganda of the III Reich, states: "If you tell a lie big enough and keep repeating it, people will eventually come to believe it...." However, most probably similar statement was even earlier formulated by Vladimir Lenin: "A lie told often enough becomes truth". These statements became the base of propaganda in all authoritarian regimes. Already Gustaw Le Bon (1841-1931), French sociologist and philosopher, understood that interactions between individuals cause that a person in a crowd often behaves differently - changes individual preferences [5]. The father of modern psychology William James (1842-1910) said: "There's nothing so absurd that if you repeat it often enough, people will believe it." And ‘the Father of Spin’ Edward L. Bernays, a nephew to Sigmund Freud, in 1920s created what is now called PR by observing how masses of people could be swayed through messages repeated over and over hundreds of times [6]. Even in science frequently undetected fraudulent data and results in peer-reviewed journals are quoted again and again by other researchers, who are in turn re-quoted by still others, and so on ([7], [8]). ‘Regularity’ that a lie if repeated hundreds times becomes the truth is similar to money savings with compound interests. So called ‘rule 72’ says that if one subdivides 72 by the percentage added per annum the result will be a good approximation of the period (expressed in years) necessary for the investment to double itself. Similarly, if one subdivides 72 by (| imn – 1|*100) one calculates the
approximate number of expositions necessary for the preference of the subject n towards the object m to increase twofold under assumption that impact matrix I does not change with time. One should not forget ‘negative impact’ – if imn(t) < 1 each exposition discourages subject n from choosing object m. Even a minuscule difference in initial preferences or a miniscule difference in impact values may lead to dramatically different results of GoC. Like statistical physics was not necessary to understand role of difference of temperature in heat conduction it is not necessary to consider particulars of the reaction of Central Nervous System of an object on exposition of a given subject. So, the Game of Choosing may influence neuromarketing [9], behavioral economics [10], neuroeconomics [11] like nonlinear dynamics and chaos theory changed the paradigms of classical physics. In all above examples the subjects made their decisions of choosing while having only limited information about the objects they were choosing from. Moreover, each of the subjects had accessible different information, so each subject had different preferences. Real life decisions are usually made in the state of uncertainty [12].
Acknowledgements This work was partially supported by Nalecz Institute of Biocybernetics and Biomedical Engineering, Polish Academy of Sciences, Warsaw, through statutory project 4.4/st/12. References: [1] W. Klonowski, M. Pierzchalski, Chaos
emerging in selection or election process due to simple iterations – Game of Choosing model, NOLASC’12, Porto, July 1-3, 2012.
[2] W. Klonowski, M. Pierzchalski, P. Stepien, and R. Stepien, Econobiophysics – Choosing with Diversified Accessible Information, Proceedings of the Tenth International Conference on Information and Management Sciences, Lhasa, China, August, 6-12, 2011. M. Gen, G. Barwolff, P. Li (Eds), Series of Information and Management Sciences, California Polytechnic State University, USA, Vol. 10, 2011, pp. 328-333.
[3] W. Klonowski, M. Pierzchalski, P. Stepien and R.A. Stepien, Econobiophysics - Game of Choosing. Model of selection or election process with diverse accessible information, Nonlinear Biomedical Physics 5:7, 2011,
Recent Researches in Automatic Control, Systems Science and Communications
ISBN: 978-1-61804-103-6 30
available on-line: http://www.nonlinearbiomedphys.com/content/pdf/1753-4631-5-7.pdf
[4] R.C. Gonzalez, R.E. Woods, Digital Image Processing, New Jersey. 2nd edition, 2001.
[5] G. Le Bon, Psychologie des foule, Paris, 1895 [6] L.Tye, The Father of Spin: Edward L. Bernays
and the Birth of Public Relations, Crown Publishers Inc. 2001.
[7] R. King, Medical journals rarely disclose researchers' ties, Wall St Journal 2 Feb 1999.
[8] R. Engler et al. Misrepresentation and Responsibility in Medical Research, New England Journal of Medicine, 317:1383, 1987.
[9] A.G. Sanfley, J.K. Rilling, J.A. Aronson, L.E. Nystrom, J.D. Cohen. The neural basis of economic decision-making in the ultimatum game, Science, 300, 2003, pp. 1755-1758.
[10] C.F. Camerer, G. Loewenstein, M. Rabin (Eds), Advances in Behavioral Economics. Princeton University Press, Princeton and Oxford; 2005.
[11] P.W. Glimcher, M.C. Dorris, H.M. Bayer, Physiological utility theory and the neuroeconomics of choice, Games and Economic Behavior, 52: 213-256, 2005.
[12] Baoding Liu, Uncertainty Theory, 2nd Edition, Springer Verlag, Berlin, 2007.
Recent Researches in Automatic Control, Systems Science and Communications
ISBN: 978-1-61804-103-6 31
Related Documents











