Linear Control Systems 2017 Shiraz University of Technology Dr. A. Rahideh In The Name of God The Most Compassionate, The Most Merciful

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Linear Control Systems
2017 Shiraz University of Technology Dr. A. Rahideh
In The Name of God The Most
Compassionate, The Most Merciful

2
Table of Contents
1. Introduction to Control Systems
2. Mathematical Modelling of Dynamic Systems
3. Steady State and Transient Response Analysis
4. Root Locus Analysis
5. Frequency Response Analysis
2017 Shiraz University of Technology Dr. A. Rahideh

3
Chapter 3 Steady State and Transient Response Analysis
3.1. First-Order Systems
3.2. Second-Order Systems
3.3. Higher-Order Systems
3.4. Routh’s Stability Criterion
3.5. Effects of Integral and Derivative Control Actions
3.6. Steady-State Error in Unity Feedback Control Systems
2017 Shiraz University of Technology Dr. A. Rahideh

4
Introduction • As mentioned, the first step in analyzing a control system was
to derive a mathematical model of the system.
• Once such a model is obtained, various methods are available for the analysis of system performance.
• Typical Test Signals • Step functions
• Ramp functions
• acceleration functions
• impulse functions
• sinusoidal functions
• White noise
2017 Shiraz University of Technology Dr. A. Rahideh

5
Transient Response and Steady-State Response
• The time response of a control system consists of two parts: • the transient response and • the steady-state response.
• Transient response means the part of response goes from the
initial state to the final state.
• By steady-state response, we mean the manner in which the system output behaves as t approaches infinity.
• Thus the system response c(t) may be written as
)()()( tctctc sstr
2017 Shiraz University of Technology Dr. A. Rahideh

6
Stability of LTI Systems
• A control system is in equilibrium if, in the absence of any disturbance or input, the output stays in the same state.
• A linear time-invariant control system is stable if the output eventually comes back to its equilibrium state when the system is subjected to an initial condition.
• A linear time-invariant control system is critically stable if oscillations of the output continue forever.
• It is unstable if the output diverges without bound from its equilibrium state when the system is subjected to an initial condition.
2017 Shiraz University of Technology Dr. A. Rahideh

7
First-Order System
Consider the first-order system shown below. Physically, this system may represent an RC circuit.
1
1
)(
)(
TssR
sC
)(sE )(sC )(sR
+ _ Ts
1
)(sC )(sR
1
1
Ts
sv C i
+ _
R
+
cv
_
)()( sVsC c
)()( sVsR s
RCT
2017 Shiraz University of Technology Dr. A. Rahideh
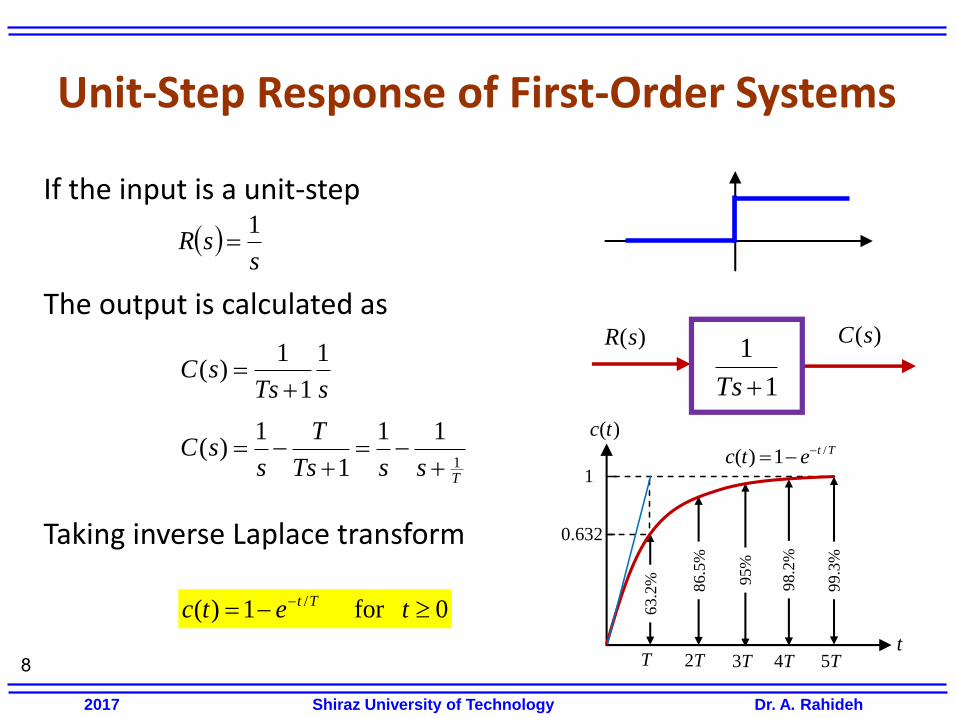
If the input is a unit-step The output is calculated as Taking inverse Laplace transform
8
Unit-Step Response of First-Order Systems
s
sR1
sTssC
1
1
1)(
)(sC )(sR
1
1
Ts
TssTs
T
ssC
1
11
1
1)(
0for1)( / tetc Tt
t
)(tc
T 2T 3T 5T 4T
1
0.632
63.2
%
86.5
%
95%
98.2
%
99.3
%
Ttetc /1)(
2017 Shiraz University of Technology Dr. A. Rahideh

If the input is a unit-ramp The output is calculated as Taking inverse Laplace transform
9
Unit-Ramp Response of First-Order Systems
2
1
ssR
2
1
1
1)(
sTssC
)(sC )(sR
1
1
Ts
1
1)(
2
2
Ts
T
s
T
ssC
0for)( / tTeTttc Tt
T
t
)(tc
T 2T 3T 5T 4T
TtTeTttc /)(
6T
T
2T
3T
5T
4T
6T
ttr )(
T
2017 Shiraz University of Technology Dr. A. Rahideh

If the input is a unit-ramp The output is calculated as Taking inverse Laplace transform
10
Unit-Impulse Response of First-Order Systems
1sR
1
1)(
TssC
)(sC )(sR
1
1
Ts
0for1
)( / teT
tc Tt
t
)(tc
T 2T 3T 5T 4T
TteT
tc /1)(
6T
T
1
2017 Shiraz University of Technology Dr. A. Rahideh

Assume that the error is defined as And the steady-state error is calculated by
11
Steady-State Error First-Order Systems
tctrte
tctret
ss
lim
Input signal Error Steady-state error
Unit-Step
Unit-Ramp
Unit-Impulse
TteTte /1 Tess
Ttete / 0for1 ttr
0for tttr
ttr
0sse
Tt
Tette /1 0sse
)(sE )(sC )(sR
+ _ Ts
1
2017 Shiraz University of Technology Dr. A. Rahideh

Using unit-impulse, unit-step, unit-ramp the following outputs are obtained: Since unit-impulse is the derivative of unit-step and unit-step is the derivative of unit-ramp, the corresponding outputs have the same relation in LTI systems: 12
Important Property of LTI Systems
0for12 ttr
0for3 tttr
otherwise0
01
tttr
0for1)( /
2 tetc Tt
0for)( /
3 tTeTttc Tt
0for1
)( /
1 teT
tc Tt
trdt
dtr 21 tc
dt
dtc 21
trdt
dtr 32 tc
dt
dtc 32
2017 Shiraz University of Technology Dr. A. Rahideh

• Superposition
• Homogeneity or Scaling
• Derivative
• Integration
13
Important Property of LTI Systems
Linear
System
Input Output
)(1 tu )(1 ty
Linear
System
Input Output
)(2 tu )(2 ty
Linear
System
Input Output
)()( 21 tutu )()( 21 tyty
Linear
System
Input Output
)(1 tu )(1 ty
Linear
System
Input Output
)(1 tu )(1 ty
Linear
System
Input Output
)(1 tu )(1 ty
Linear
System
Input Output
)(1 tudt
d )(1 tydt
d
Linear
System
Input Output
)(1 tu )(1 ty
Linear
System
Input Output
dtu 1 dty1
2017 Shiraz University of Technology Dr. A. Rahideh

14
Second-Order System
Consider the second-order system shown below. Physically, this system may represent DC servo drive system.
: Undamped natural frequency : Damping ratio
22
2
2)(
)(
nn
n
sssR
sC
av ai
+ _
aR
+
ae
_
aL
J
B
fi fL
fR
fv +
_
)(sE )(sC )(sR
+ _ n
n
ss
2
2
n
Standard Form
)(sC )(sR
22
2
2 nn
n
ss
2017 Shiraz University of Technology Dr. A. Rahideh

15
Second-Order System
The dynamic behaviour of the second-order system can be described in terms of two parameters and n.
1. Undamped case
2. Under-damped case
3. Critically damped case
4. Over-damped case
22
2
2)(
)(
nn
n
sssR
sC
10
1
1
0
2017 Shiraz University of Technology Dr. A. Rahideh

16
Second-Order System 1. Undamped case
In this the oscillation continues indefinitely. The roots of the denominator are on the imaginary axis
The unit-step response is obtained as
22
2
)(
)(
n
n
ssR
sC
0
njs 1 njs 2
nj
nj
)Im(s
)Re(s
sssC
n
n 1)(
22
2
ssR
1)( 0forcos1)( tttc n
tn
2
)(tc
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

17
Second-Order System 2. Under-damped case
• In this case the closed-loop poles are complex conjugates and lie in the left-half s plane.
• The transient response is oscillatory.
• The closed-loop transfer function can be written as
where is called the damped natural frequency.
10
22
2
2)(
)(
nn
n
sssR
sC
dndn
n
jsjssR
sC
2
)(
)(
21 nd
dn j
)Im(s
)Re(s
dn j
n
d
dn js 1
dn js 1
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

18
Second-Order System 2. Under-damped case
The unit-step response of this case is as follows
sss
sCnn
n 1
2)(
22
2
ssR
1)(
10
2222
1)(
dn
n
dn
n
ss
s
ssC
0forsin1
cos1)(2
tttetc dd
tn
0for1
tansin1
1)(2
1
2
tte
tc d
tn
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

19
Second-Order System 3. Critically-damped case
• In this case the two poles are equal.
• The closed-loop transfer function can be written as
• The unit-step response of this case is as follows
22
2
2)(
)(
nn
n
sssR
sC
2
2
)(
)(
n
n
ssR
sC
nss 21
1
)Im(s
)Re(s n
sssC
n
n 1)(
2
2
0for11)(
ttetc n
tn
ssR
1)(
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

20
Second-Order System 4. Over-damped case
In this case the two poles are negative real and unequal.
• The closed-loop transfer function can be written as
• The unit-step response of this case is as follows
22
2
2)(
)(
nn
n
sssR
sC
11)(
)(
22
2
nnnn
n
sssR
sC ns 12
1
ssR
1)(
1
)Im(s
)Re(s 1s
2s
ns 12
2
sss
sC
nnnn
n
11
)(22
2
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

21
Second-Order System 4. Over-damped case
• The unit-step response of this case is as follows
• Taking inverse Laplace transform yields
ssR
1)(
1
sss
sC
nnnn
n
11
)(22
2
0for1112
11)(
2
1
2
1
2
22
tee
tc
tt nn
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

22
Definitions of Transient-Response Specifications
In specifying the transient-response characteristics of a control system to a unit-step input, it is common to specify the following: 1. Delay time, td
2. Rise time, tr
3. Peak time, tp
4. Maximum overshoot, Mp
5. Settling time, ts
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

1. Delay time, td :The delay time is the time required for the response to reach half the final value the very first time.
23
Definitions of Transient-Response Specifications
Step response
2017 Shiraz University of Technology Dr. A. Rahideh
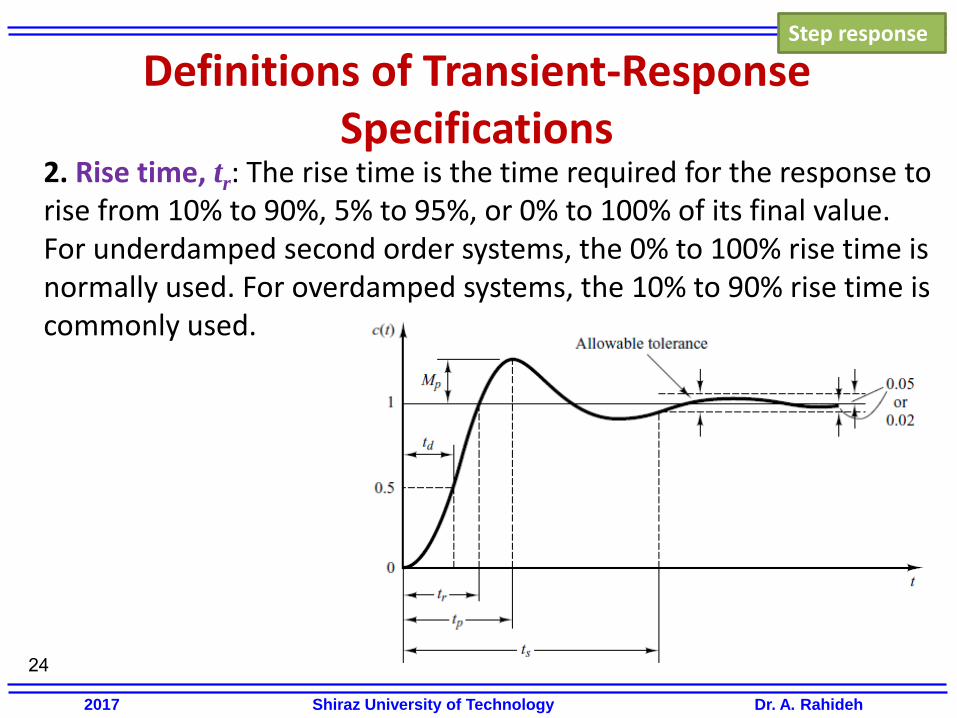
2. Rise time, tr: The rise time is the time required for the response to rise from 10% to 90%, 5% to 95%, or 0% to 100% of its final value. For underdamped second order systems, the 0% to 100% rise time is normally used. For overdamped systems, the 10% to 90% rise time is commonly used.
24
Definitions of Transient-Response Specifications
Step response
2017 Shiraz University of Technology Dr. A. Rahideh
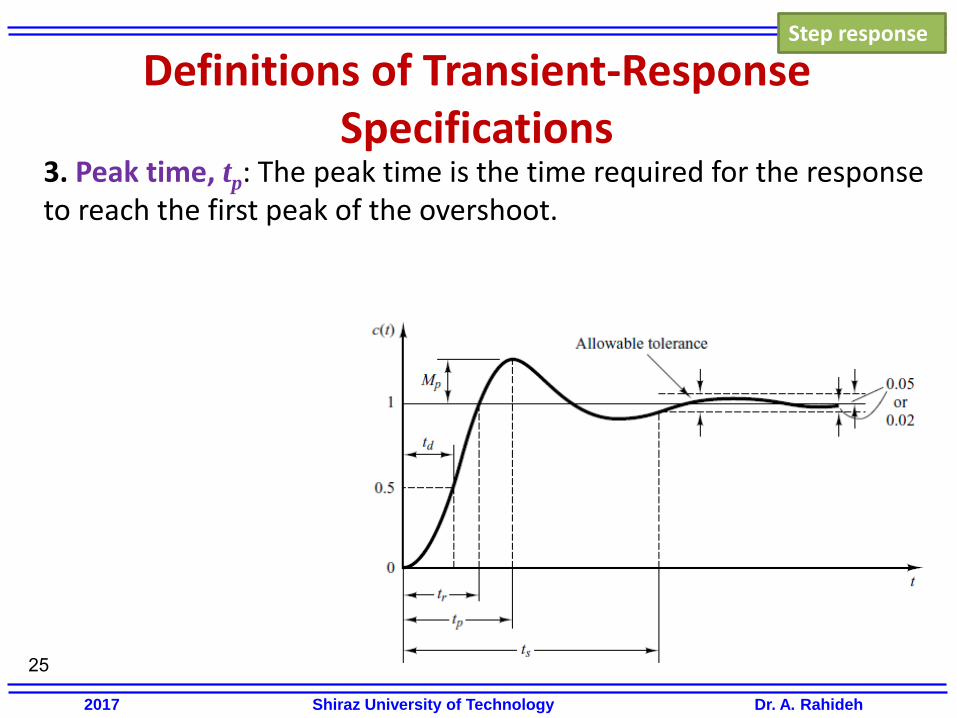
3. Peak time, tp: The peak time is the time required for the response to reach the first peak of the overshoot.
25
Definitions of Transient-Response Specifications
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

4. Maximum overshoot, Mp: The maximum overshoot is the maximum peak value of the response curve measured from unity. If the final steady-state value of the response differs from unity, then it is common to use the maximum percent overshoot. It is defined by
26
Definitions of Transient-Response Specifications
100%
c
ctcM
p
p
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

5. Settling time, ts: The settling time is the time required for the response curve to reach and stay within a range about the final value of size specified by absolute percentage of the final value (usually 2% or 5%). The settling time is related to the largest time constant of the control system.
27
Definitions of Transient-Response Specifications
Step response
2017 Shiraz University of Technology Dr. A. Rahideh
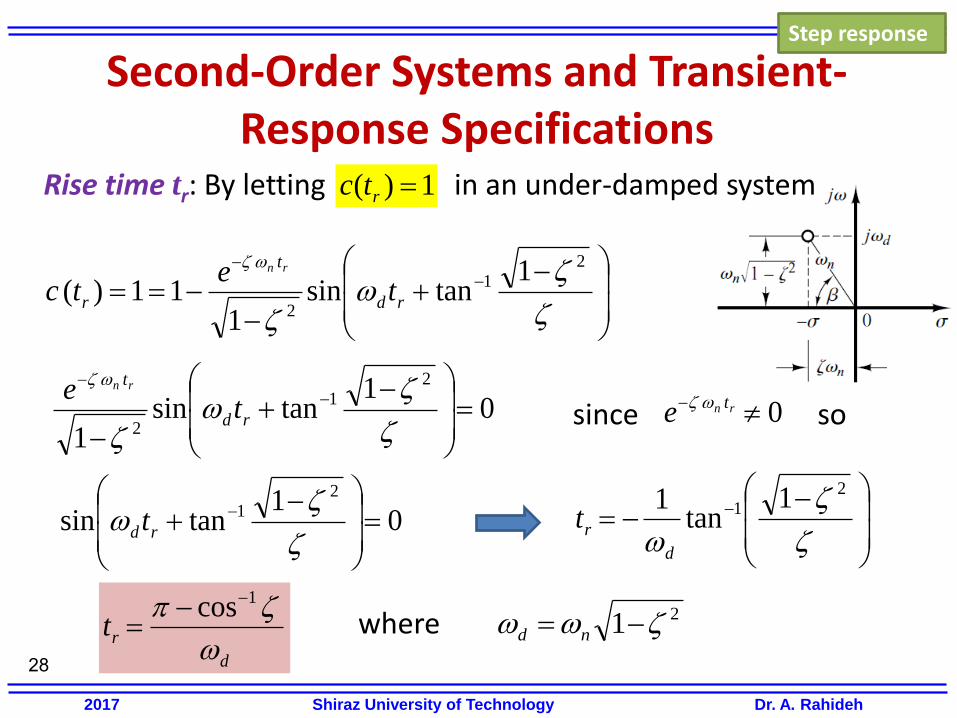
Rise time tr: By letting in an under-damped system since so
where 28
Second-Order Systems and Transient-Response Specifications
21
2
1tansin
111)( rd
t
r te
tcrn
1)( rtc
01
tansin1
21
2
rd
t
te rn
0 rn t
e
01
tansin2
1
rd t
21 nd
21 1
tan1
d
rt
d
rt
1cos
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

Peak time tp: Assume again the system is under-damped
29
Second-Order Systems and Transient-Response Specifications
21
2
21
2
1tancos
1
1tansin
1
te
te
dt
dc
d
t
d
d
t
n
n
n
0 pttdt
dc
0sin1 2
pd
tn
tt
tedt
dcn
p
d
pt
0sin pd t
3,2,,0pd t
1st peak
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

Maximum overshoot Mp: Assume again the system is under-damped
30
Second-Order Systems and Transient-Response Specifications
1)( pp tcM
21
2
1tansin
1
pn t
p
eM
)/( dneM p
21/
eM p
21
21
2
1tansincos
1tancossin
1
pn t
p
eM
0 21
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

Settling time ts: Assume again the system is under-damped Consider the time constant is (2% criterion)
(5% criterion)
31
Second-Order Systems and Transient-Response Specifications
n
s Tt
44
0for1
tansin1
1)(2
1
2
tte
tc d
tn
n
s Tt
33
n
T
1
Step response
2017 Shiraz University of Technology Dr. A. Rahideh

Example: Consider a system with the following block diagram. Calculate k and kg so that the maximum overshoot remains under 20% and the peak time happens before the first second for a unit-step input.
32
Second-Order Systems
)1( ss
k c r
+ _
sk g1
2017 Shiraz University of Technology Dr. A. Rahideh

Example: to have and
33
Second-Order Systems
)1( ss
k c r
+ _
sk g1
?k ?gk %20pM 1pt
kskks
k
skss
k
ss
k
gg
r
c
)1()1(
)1(1
)1(2
22
2
2 nn
n
r
c
ss
kn 2 kn
gn kk12k
kkg
2
1
2017 Shiraz University of Technology Dr. A. Rahideh

Example: to have and
34
Second-Order Systems
)1( ss
k c r
+ _
sk g1
?k ?gk %20pM 1pt
kn k
kkg
2
1
%20pM 2.021/
eM p456.0
1pt 11 2
n
pt21
n
rad/s53.3n
2017 Shiraz University of Technology Dr. A. Rahideh

Example: to have and
35
Second-Order Systems
)1( ss
k c r
+ _
sk g1
?k ?gk %20pM 1pt
kn
k
kkg
2
1
456.0
rad/s53.3n53.3k 5.12k
456.02
1
k
kkg
k
kkg
12456.0
2017 Shiraz University of Technology Dr. A. Rahideh

36
Second-Order System The unit-impulse response of the second-order system can be easily
obtained by the inverse Laplace transform of
• For
• For
• For
10
22
2
2)(
nn
n
sssC
Impulse response
0forsin1
)(2
tte
tc d
t
nn
1
0for)( 2
tettct
nn
1
0for12
)(11
2
22
teetctt
n nn
21 nd
2017 Shiraz University of Technology Dr. A. Rahideh

The maximum overshoot for the unit-impulse response of the under-damped system occurs at The maximum overshoot is
37
Second-Order Systems and Transient-Response Specifications
10where1
1tan
2
21
n
peakt
Impulse response
10where1
tan1
exp)(2
1
2max
ntc
2017 Shiraz University of Technology Dr. A. Rahideh

The peak time (tp) and maximum overshoot (Mp) of a unit-step response can be obtained from the unit-impulse response
38
Second-Order Systems
Impulse response
2017 Shiraz University of Technology Dr. A. Rahideh
• The closed-loop transfer function of higher-order systems can be expressed using the following general form:
• Factorizing the numerator and denominator yields • The roots of the numerator are the zeros (zj where j=1,2,…,m) of
the system and the roots of the denominator are the poles (pi where i=1,2,…,n) of the system.
39
Higher-Order Systems
)()(
)(
1
1
10
1
1
10 nmasasasa
bsbsbsb
sR
sC
nn
nn
mm
mm
)()(
)(
21
21 nmpspsps
zszszsK
sR
sC
n
m
2017 Shiraz University of Technology Dr. A. Rahideh

• Assuming all poles are real and distinct, for a unit-step input the output is
where ai is the residue of the pole at s = -pi
• If the system involves multiple poles, then C(s) will have multiple-
pole terms.
40
Higher-Order Systems
n
i i
i
ps
a
s
asC
1
)(
2017 Shiraz University of Technology Dr. A. Rahideh

• If all closed-loop poles lie in the left-half s plane, the relative magnitudes of the residues determine the relative importance of the components in the expanded form of C(s).
• If there is a closed-loop zero close to a closed-loop pole, then the residue at this pole is small and the coefficient of the transient-response term corresponding to this pole becomes small.
• A pair of closely located poles and zeros will effectively cancel each other.
41
Higher-Order Systems
If a pole is close to a zero, the effect of that pole is low.
2017 Shiraz University of Technology Dr. A. Rahideh

• If a pole is located very far from the origin, the residue at this pole may be small.
• The transients corresponding to such a remote pole are small and last a short time.
• Terms in the expanded form of C(s) having very small residues contribute little to the transient response, and these terms may be neglected.
• If this is done, the higher-order system may be approximated by a lower-order one.
42
Higher-Order Systems
Far poles from the origin have low effects.
2017 Shiraz University of Technology Dr. A. Rahideh

• Consider the case where the poles of C(s) consist of distinct real poles and pairs of complex-conjugate poles. Therefore we have
• The unit-step response c(t) is then
• If all poles have negative real part, the system is stable and 43
Higher-Order Systems
)2(
2
1)(
122
2
1
nrqss
csb
ps
a
s
asC
r
k kkk
kkkkkkq
j j
j
r
k
kk
t
k
r
k
kk
t
k
q
j
tp
j
tec
tebeaatc
kk
kkj
1
2
1
2
1
1sin
1cos)(
ac )(
2017 Shiraz University of Technology Dr. A. Rahideh

• If the ratios of the real parts of the poles exceed 5 and there are no zeros nearby, the poles nearest the j axis will dominate the transient response behaviour.
• Example: In the following system the dominant pole is 0.5, because there is no zero nearby (near 0.5) and the ratio of poles is 6 which exceeds 5.
• Example: In the following system a zero is near the pole 0.5 therefore the dominant pole is not 0.5 but it is 3.
44
Dominant Closed-Loop Poles
5.03
)5(7
)(
)(
ss
s
sR
sC
5.03
)48.0(
)(
)(
ss
ss
sR
sC
2017 Shiraz University of Technology Dr. A. Rahideh

• If all closed-loop poles lie in the left-half s plane, the system is stable.
• If any of the closed-loop poles lie in the right-half s plane, the system is unstable.
45
Stability Analysis in the Complex Plane
5.03
)5(7
)(
)(
ss
s
sR
sC
5.03
)5(7
)(
)(
ss
s
sR
sC
2017 Shiraz University of Technology Dr. A. Rahideh

Routh’s stability criterion tells us whether or not there are unstable roots in a polynomial equation without actually solving for them. The procedure is as follows: 1. Consider the following close-loop system
2. Write the characteristics equation Where the coefficients are real quantities. We assume that an is not zero; i.e. any zero root has been removed. 46
Routh’s Stability Criterion
nn
nn
mm
mm
asasasa
bsbsbsb
sR
sC
1
1
10
1
1
10
)(
)(
01
1
10
nn
nn asasasa
2017 Shiraz University of Technology Dr. A. Rahideh

3. If any of the coefficients are zero or negative in the presence of at least one positive coefficient, a root or roots exist that are imaginary or that have positive real parts. Therefore, in such a case, the system is not stable.
4. If all coefficients are positive, arrange the coefficients of the polynomial in rows and columns according to the following pattern:
The number of rows is n+1.
47
Routh’s Stability Criterion
0
3
2
7531
1
6420
s
s
s
aaaas
aaaas
n
n
n
n
2017 Shiraz University of Technology Dr. A. Rahideh
01
1
10
nn
nn asasasa

5. The coefficients to be calculated are listed in the table
where
48
Routh’s Stability Criterion
1
0
4321
3
4321
2
7531
1
6420
gs
ccccs
bbbbs
aaaas
aaaas
n
n
n
n
1
30211
a
aaaab
1
50412
a
aaaab
1
70613
a
aaaab
1
21311
b
baabc
1
31512
b
baabc
1
41713
b
baabc
2017 Shiraz University of Technology Dr. A. Rahideh
01
1
10
nn
nn asasasa

• To simplify the calculation an entire row may be divided or multiplied by a positive number, e.g. k > 0.
• Routh’s stability criterion states that the number of roots with positive real parts is equal to the number of changes in sign of the coefficients of the first column of the array.
• The necessary and sufficient condition that all roots lie in the left-half s plane is that all terms in the first column of the array have positive signs. 49
Routh’s Stability Criterion
1
0
4321
3
4321
2
7531
1
6420
gs
ccccs
kbkbkbkbs
aaaas
aaaas
n
n
n
n
2017 Shiraz University of Technology Dr. A. Rahideh

Example: Apply Routh’s stability criterion to the following polynomial: 1. Form the table and simplify (second row is divided by 2)
50
Routh’s Stability Criterion
05432 234 ssss
0
1
2
3
4
042
531
s
s
s
s
s
01
1
10
nn
nn asasasa
0
3
2
7531
1
6420
s
s
s
aaaas
aaaas
n
n
n
n
0
1
2
3
4
021
531
s
s
s
s
s
2017 Shiraz University of Technology Dr. A. Rahideh

Solution: 2. Calculate the remaining coefficients
51
Routh’s Stability Criterion
5
3
51
021
531
0
1
2
3
4
s
s
s
s
s
1
0
4321
3
4321
2
7531
1
6420
gs
ccccs
bbbbs
aaaas
aaaas
n
n
n
n
11
21311
b
1
50412
a
aaaab
31
51211
c
1
30211
a
aaaab
51
01512
b
1
21311
b
baabc
53
01531
d
1
21211
c
cbbcd
2017 Shiraz University of Technology Dr. A. Rahideh

Solution: • The first column numbers have changed their signs twice;
therefore there are two roots with positive real parts. • The system is therefore unstable.
52
Routh’s Stability Criterion
5
3
51
021
531
0
1
2
3
4
s
s
s
s
s
2017 Shiraz University of Technology Dr. A. Rahideh

Special Case 1: If a first-column term in any row is zero, but the remaining terms are not zero or there is no remaining term, then the zero term is replaced by a very small positive number e and the rest of the array is evaluated. Example: If the sign of the coefficient above the zero (e) is the same as that below it, it indicates that there are a pair of imaginary roots. Actually, This example has two roots at . 53
Routh’s Stability Criterion
022 23 sss
2
0
22
11
0
1
2
3
s
s
s
s
e
js
2017 Shiraz University of Technology Dr. A. Rahideh

If, however, the sign of the coefficient above the zero (e ) is opposite that below it, it indicates that there is one sign change. Example: There are two sign changes of the coefficients in the first column. So there are two roots in the right-half s plane. This agrees with the correct result indicated by the factored form of the polynomial equation. 54
Routh’s Stability Criterion
0212323 ssss
2
3
20
31
0
21
2
3
s
s
s
s
e
e
2017 Shiraz University of Technology Dr. A. Rahideh

Special Case 2: If all the coefficients in any derived row are zero, it indicates that there are roots of equal magnitude lying radially opposite in the s plane (that is, two real roots with equal magnitudes and opposite signs and/or two conjugate imaginary roots). In such a case, the evaluation of the rest of the array can be continued by forming an auxiliary polynomial with the coefficients of the last row and by using the coefficients of the derivative of this polynomial in the next row. Such roots with equal magnitudes and lying radially opposite in the s plane can be found by solving the auxiliary polynomial, which is always even. For a 2n-degree auxiliary polynomial, there are n pairs of equal and opposite roots. 55
Routh’s Stability Criterion
2017 Shiraz University of Technology Dr. A. Rahideh

Example:
• The terms in the s3 row are all zero. (Such a case occurs only in an odd-numbered row.)
• The auxiliary polynomial is formed from the coefficient of the s4 row:
• which indicates that there are two pairs of roots of equal magnitude and opposite sign (that is, two real roots with the same magnitude but opposite signs or two complex conjugate roots on the imaginary axis). 56
Routh’s Stability Criterion 0502548242 2345 sssss
00
50482
25241
3
4
5
s
s
s
Auxiliary polynomial P(s)
50482)( 24 sssP
2017 Shiraz University of Technology Dr. A. Rahideh

Solution: • The derivative of P(s) with respect to s is • The terms in the s3 row are replaced by the coefficients of the
last equation, i.e. 8 and 96.
57
Routh’s Stability Criterion 0502548242 2345 sssss
Coefficients of dP(s) / dt
ssds
sdP968
)( 3
50
0113
5024
968
50482
25241
0
1
2
3
4
5
s
s
s
s
s
s
2017 Shiraz University of Technology Dr. A. Rahideh

Solution: • We see that there is one change in sign in the first column of
the new array. • Thus, the original equation has one root with a positive real
part.
58
Routh’s Stability Criterion 0502548242 2345 sssss
50
0113
5024
968
50482
25241
0
1
2
3
4
5
s
s
s
s
s
s
2017 Shiraz University of Technology Dr. A. Rahideh

Example: Consider the following system. Determine the range of K for stability. • The characteristics equations is • The array of coefficients becomes
59
Application of Routh’s Stability Criterion to Control-System Analysis
Kssss
K
sR
sC
233)(
)(234
0233 234 Kssss
Ks
Ks
Ks
s
Ks
0
791
372
3
4
2
023
31
0279 K
0K
09
14 K
The numbers on the first column should all be positive:
2017 Shiraz University of Technology Dr. A. Rahideh

1. Steady-State Response
2. Steady-State Error
or
60
Some Definitions
)(lim)()( tcctct
ss
)(lim)( tetet
ss
)(lim)(0
ssEtes
ss
G(s) )(sE )(sC )(sR
+ _
2017 Shiraz University of Technology Dr. A. Rahideh
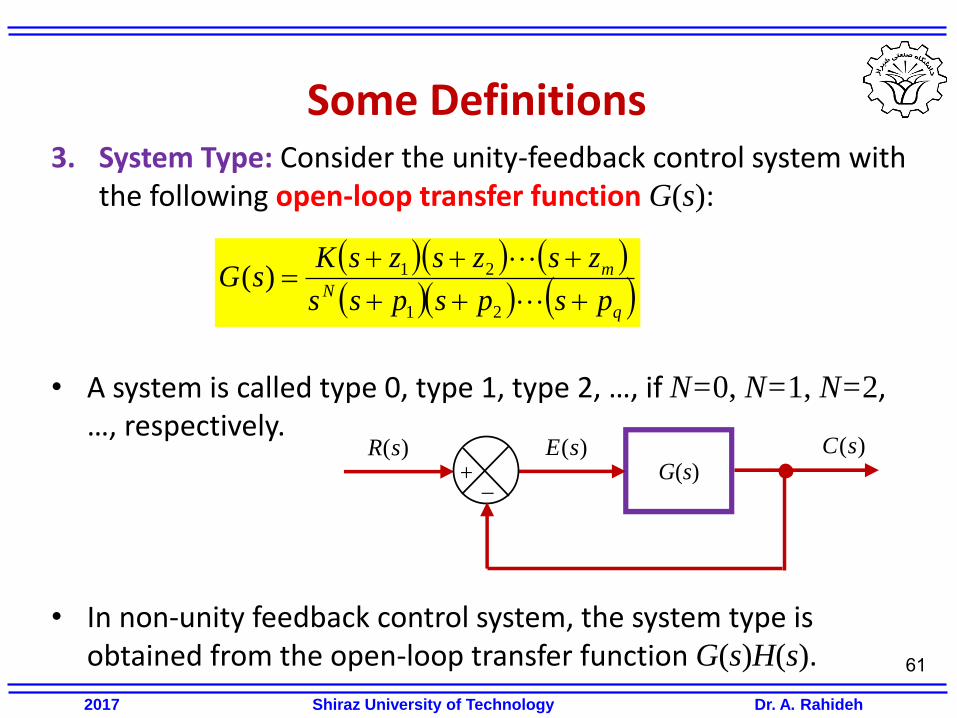
3. System Type: Consider the unity-feedback control system with the following open-loop transfer function G(s):
• A system is called type 0, type 1, type 2, …, if N=0, N=1, N=2,
…, respectively. • In non-unity feedback control system, the system type is
obtained from the open-loop transfer function G(s)H(s). 61
Some Definitions
q
N
m
pspspss
zszszsKsG
21
21)(
G(s) )(sE )(sC )(sR
+ _
2017 Shiraz University of Technology Dr. A. Rahideh

1. Proportional controller (P)
2. Proportional-Integral controller (PI)
3. Proportional-Derivative controller (PD)
4. Proportional-Integral-Derivative controller (PID)
62
Different Types of Controllers
Controller C R
+ _ Plant E U
2017 Shiraz University of Technology Dr. A. Rahideh

1. Proportional controller (P)
63
Different Types of Controllers
)()( teKtu p )()( sEKsU p
C R
+ _ Plant E U
pK
2017 Shiraz University of Technology Dr. A. Rahideh

2. Proportional-Integral controller (PI)
Or
64
Different Types of Controllers
t
ip deKteKtu0
)()()( )()( sEs
KKsU i
p
t
i
p deT
teKtu0
)(1
)()( )(1
1)( sEsT
KsUi
p
i
p
iT
KK
C R
+ _ Plant E U
sTK
i
p
11
2017 Shiraz University of Technology Dr. A. Rahideh

3. Proportional-Derivative controller (PD)
Or
65
Different Types of Controllers
dt
tdeKteKtu dp
)()()( )()( sEsKKsU dp
dt
tdeTteKtu dp
)()()( )(1)( sEsTKsU dp
dpd TKK
C R
+ _ Plant E U
sTK dp 1
2017 Shiraz University of Technology Dr. A. Rahideh

4. Proportional-Integral-Derivative controller (PID)
Or
66
Different Types of Controllers
dt
tdeKdeKteKtu d
t
ip
)()()()(
0 )()( sEsK
s
KKsU d
ip
dt
tdeTde
TteKtu d
t
i
p
)()(
1)()(
0 )(
11)( sEsT
sTKsU d
i
p
C R
+ _ Plant E U
sT
sTK d
i
p
11
dpd TKK
i
p
iT
KK
2017 Shiraz University of Technology Dr. A. Rahideh

Integral control action: • In the proportional control of a plant whose transfer function
does not possess an integrator 1/s, there is a steady-state error, or offset, in the response to a step input. Such an offset can be eliminated if the integral control action is included in the controller.
• Note that integral control action, while removing steady-state error, may lead to oscillatory response of slowly decreasing amplitude or even increasing amplitude, both of which are usually undesirable.
67
Different Types of Controllers
Controller C R
+ _ Plant E U
2017 Shiraz University of Technology Dr. A. Rahideh

Derivative control action: Derivative control action, when added to a proportional controller, provides a means of obtaining a controller with high sensitivity. An advantage of using derivative control action is that it responds to the rate of change of the actuating error and can produce a significant correction before the magnitude of the actuating error becomes too large. Derivative control thus anticipates the actuating error, initiates an early corrective action, and tends to increase the stability of the system.
68
Different Types of Controllers
Controller C R
+ _ Plant E U
2017 Shiraz University of Technology Dr. A. Rahideh

Unit step input: where kp is the static position error constant
69
Steady-State Errors in Unity-Feedback Control Systems
G(s) )(sE )(sC )(sR
+ _
)()()( sCsRsE )(1
)()()()(
sG
sGsRsRsE
)(1
)()(
sG
sRsE
)(1
)(lim
0 sG
sRse
sss
ssR
1)(
ssGse
sss
1
)(1
1lim
0
)0(1
1
Gess
p
ssk
e
1
1
)0()(lim0
GsGks
p
2017 Shiraz University of Technology Dr. A. Rahideh

Unit ramp input: where kv is the static velocity error constant
70
Steady-State Errors in Unity-Feedback Control Systems
G(s) )(sE )(sC )(sR
+ _
)(1
)(lim
0 sG
sRse
sss
2
1)(
ssR
20
1
)(1
1lim
ssGse
sss
)(
1lim
0 ssGe
sss
v
ssk
e1
)(lim0
ssGks
v
2017 Shiraz University of Technology Dr. A. Rahideh

Unit parabolic input: where ka is the static acceleration error constant
71
Steady-State Errors in Unity-Feedback Control Systems
G(s) )(sE )(sC )(sR
+ _
)(1
)(lim
0 sG
sRse
sss
3
1)(
ssR
30
1
)(1
1lim
ssGse
sss
)(
1lim
20 sGse
sss
a
ssk
e1
)(lim 2
0sGsk
sa
2017 Shiraz University of Technology Dr. A. Rahideh

input System type
Unit step Unit ramp Unit Parabolic
0
1
2
3
Effects of the system type on the steady-state error:
72
Steady-State Errors in Unity-Feedback Control Systems
pk1
1
vk
1
ak
1
0
0 0
0 0 0
2017 Shiraz University of Technology Dr. A. Rahideh

Example: In the following system, calculate the gain K to have steady-state error not more than 5% in response to a unit step input.
73
Steady-State Errors in Unity-Feedback Control Systems
C R
+ _
E U K
1
05.0
s
s
KsG
1
05.0)(
p
ssk
e
1
1
KsGks
p 05.0)(lim0
05.005.01
1
Kess 380K
ssR
1)( 05.0sse
2017 Shiraz University of Technology Dr. A. Rahideh
Related Documents











