Improving Robustness of Infrared Target Tracking Algorithms Based on Template Matching A methodology for improving the robustness of target tracking algorithms for forward looking infrared (FLIR) imagery is presented. The designed technique exploits a motion prediction metric to identify the occurrence of false alarms and to control the activation of a template matching (TM) based phase. The proposed approach is particularly suited to high speed algorithms in which tracking is generally performed by using a computationally efficient target detection (TD) step and TM only acts as a recovery means. In such frameworks, the activation strategy has a strong impact on tracking performance, as an improper activation pattern could both affect execution speed and result into critical tracking failures. The designed strategy is compared with a reference implementation relying on a distance-based activation logic, showing improved performance and self-adaptability to variations both in image sequence and target characteristics, which would be required in most high speed automatic target tracking scenarios. I. INTRODUCTION Target tracking in forward looking infrared (FLIR) imagery is a challenging task. Image sequences obtained from IR sensors are often characterized by low signal-to-noise ratio and heavy background cluttering. Furthermore, when scenarios with nonstationary cameras are considered, tracking requires properly dealing with sensor ego-motion through suitable estimation and compensation techniques. Moreover, further challenges are posed by imagery with multiple and possibly moving target and nontarget objects, that can blend in the background, change their signature, size, shape, and even overlap during their motion. Finally, specific applications could introduce cumbersome real-time constraints, thus requiring tracking techniques with a reduced computational footprint. Some techniques providing significant results under the above conditions already exist. In particular, techniques proposed in [1]—[3] are capable of ensuring high speed processing of FLIR image sequences recorded from an airborne platform; this goal is achieved by splitting tracking operations into two main conceptual phases, namely a target detection Manuscript received October 13, 2009; revised May 19, 2010; released for publication August 6, 2010. IEEE Log No. T-AES/47/2/940858. Refereeing of this contribution was handled by D. Salmond. 0018-9251/11/$26.00 c ° 2011 IEEE (TD) phase and a template matching (TM) phase. The first phase is expected to be carried out in a very efficient way, e.g. by exploiting techniques based on fringe-adjusted joint transform correlation (FJTC) [1] or intensity variation function (IVF) [2, 3] . Despite their impressive detection performance and limited computational requirements, the above techniques may occasionally generate false alarms in the TD phase. In these cases, a second correlation-based recovery phase is activated to restore target position and avoid possible target losses. By relying on target shape information, this second phase is capable of coping with marked variations in target signature and also acts as a powerful ego-motion compensation mechanism (at the cost of a significantly higher complexity). Thus, for a given TD strategy, tracking robustness and performance are strongly related to the metric used for controlling TM intervention. In this paper, a probabilistic metric relying on motion prediction capable of providing for improved robustness with respect to existing implementations of IVF-based target tracking algorithms is proposed. Basically, motion prediction is used to estimate the probability associated with a given target position; this information is then considered with respect to a confidence index that is used to control the activation of the TM phase. Experimental tests were performed using FLIR image sequences from the Army Missile Command (AMCOM). Results obtained by testing the proposed solution with respect to an IVF-based reference implementation showed a significantly improved ability of the tracking algorithm to cope with sudden frame and target changes (basically due to the low signal-to-noise ratio as well as to variations in size, position and thermal imprint). Moreover, the designed algorithm exhibited an increased self-adaptability to target and sequence characteristics that could be of particular interest when automatic target tracking scenarios are considered (as a matter of example, a single confidence index allowed correct tracking of all the targets in the image sequences belonging to the experimental data set). This paper has been organized as follows. Section II reviews the main works related to IR target tracking. In Section III, issues related to false alarm generation are specifically addressed. Section IV describes the implementation chosen as a reference for comparing with the proposed methodology. The designed metric for controlling the activation of the TM phase is described in Section V. Finally, experimental results are discussed in depth in Section VI. II. BACKGROUND Although a number of techniques for tracking targets in visual images already exists, only a limited CORRESPONDENCE 1467

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Improving Robustness of Infrared Target TrackingAlgorithms Based on Template Matching
A methodology for improving the robustness of target tracking
algorithms for forward looking infrared (FLIR) imagery is
presented. The designed technique exploits a motion prediction
metric to identify the occurrence of false alarms and to control
the activation of a template matching (TM) based phase.
The proposed approach is particularly suited to high speed
algorithms in which tracking is generally performed by using
a computationally efficient target detection (TD) step and TM
only acts as a recovery means. In such frameworks, the activation
strategy has a strong impact on tracking performance, as an
improper activation pattern could both affect execution speed
and result into critical tracking failures. The designed strategy
is compared with a reference implementation relying on a
distance-based activation logic, showing improved performance
and self-adaptability to variations both in image sequence and
target characteristics, which would be required in most high
speed automatic target tracking scenarios.
I. INTRODUCTION
Target tracking in forward looking infrared (FLIR)
imagery is a challenging task. Image sequences
obtained from IR sensors are often characterized
by low signal-to-noise ratio and heavy background
cluttering. Furthermore, when scenarios with
nonstationary cameras are considered, tracking
requires properly dealing with sensor ego-motion
through suitable estimation and compensation
techniques. Moreover, further challenges are posed by
imagery with multiple and possibly moving target and
nontarget objects, that can blend in the background,
change their signature, size, shape, and even overlap
during their motion. Finally, specific applications
could introduce cumbersome real-time constraints,
thus requiring tracking techniques with a reduced
computational footprint.
Some techniques providing significant results
under the above conditions already exist. In particular,
techniques proposed in [1]—[3] are capable of ensuring
high speed processing of FLIR image sequences
recorded from an airborne platform; this goal is
achieved by splitting tracking operations into two
main conceptual phases, namely a target detection
Manuscript received October 13, 2009; revised May 19, 2010;
released for publication August 6, 2010.
IEEE Log No. T-AES/47/2/940858.
Refereeing of this contribution was handled by D. Salmond.
0018-9251/11/$26.00 c° 2011 IEEE
(TD) phase and a template matching (TM) phase.
The first phase is expected to be carried out in a very
efficient way, e.g. by exploiting techniques based on
fringe-adjusted joint transform correlation (FJTC) [1]
or intensity variation function (IVF) [2, 3] . Despite
their impressive detection performance and limited
computational requirements, the above techniques
may occasionally generate false alarms in the TD
phase. In these cases, a second correlation-based
recovery phase is activated to restore target position
and avoid possible target losses. By relying on target
shape information, this second phase is capable of
coping with marked variations in target signature and
also acts as a powerful ego-motion compensation
mechanism (at the cost of a significantly higher
complexity). Thus, for a given TD strategy, tracking
robustness and performance are strongly related to the
metric used for controlling TM intervention.
In this paper, a probabilistic metric relying on
motion prediction capable of providing for improved
robustness with respect to existing implementations
of IVF-based target tracking algorithms is proposed.
Basically, motion prediction is used to estimate the
probability associated with a given target position;
this information is then considered with respect to a
confidence index that is used to control the activation
of the TM phase.
Experimental tests were performed using FLIR
image sequences from the Army Missile Command
(AMCOM). Results obtained by testing the proposed
solution with respect to an IVF-based reference
implementation showed a significantly improved
ability of the tracking algorithm to cope with sudden
frame and target changes (basically due to the low
signal-to-noise ratio as well as to variations in size,
position and thermal imprint). Moreover, the designed
algorithm exhibited an increased self-adaptability to
target and sequence characteristics that could be of
particular interest when automatic target tracking
scenarios are considered (as a matter of example, a
single confidence index allowed correct tracking of
all the targets in the image sequences belonging to the
experimental data set).
This paper has been organized as follows.
Section II reviews the main works related to IR
target tracking. In Section III, issues related to
false alarm generation are specifically addressed.
Section IV describes the implementation chosen
as a reference for comparing with the proposed
methodology. The designed metric for controlling the
activation of the TM phase is described in Section V.
Finally, experimental results are discussed in depth in
Section VI.
II. BACKGROUND
Although a number of techniques for tracking
targets in visual images already exists, only a limited
CORRESPONDENCE 1467

amount of works address the particular issue of
target tracking for FLIR imagery. Moreover, some
of the above approaches can only be used when the
sensor ego-motion is very limited or when target
features cannot change noticeably during the tracking.
However, in real scenarios, the above assumptions
could be not applicable [29].
When targets do not change their size significantly
and ego-motion is small, detection and tracking can
be efficiently performed by exploiting morphological
operators and thresholding techniques. As a matter of
example, in [4] morphological connected operators
designed by means of general size, connectivity
and motion criteria are used in the context of target
tracking in FLIR imagery to reduce the background
clutter. In [24] and [25], morphological filters are
used in conjunction with multiscale decomposition
and adaptive thresholding techniques to enhance
signal-to-noise ratio and detect targets coarse-to-fine.
Detected targets are then tracked using different
strategies, e.g. based on spatiotemporal correlation
techniques, on the mean-shift algorithm, etc. In
particular, with the mean-shift algorithm, tracking
is achieved by iteratively translating a kernel in the
image space such that the past and current target
observations are similar [7]. Mean-shift based
approaches are widely used both in visible and IR
imagery, as they provide for a general optimization
solution that is independent from target features
[28, 29].
However, the standard mean-shift algorithm is
affected by a severe drawback, i.e., it requires that at
least some part of the target in the successive frame
reside inside the kernel [6]. When imagery is affected
by strong sensor ego-motion, this assumption might
not hold; moreover, in [17] it was demonstrated
that even in case of clutter, occlusion, or rapidly
moving objects the mean-shift cannot guarantee
global optimality, resulting in failures that cannot
be recovered. Adaptive versions of the mean-shift
approach capable of tackling the above limitations
are presented in [26] and [27]. In particular, in [27]
multiple features are extracted from both target and
background during the tracking process, and an online
feature ranking method is deployed to adaptively
select the most discriminative features, which are
then utilized for mean-shift iteration in the next
frame. Nonetheless, when shape and size of the target
change, the additional problem of adaptively adjusting
the size of the region used to track the target is
introduced. The above issue can be tackled by taking
into account the complete contour of the tracked
object. For instance, in [30] a Bayesian approach
using the probability density function of texture and
color features is adopted to dynamically adapt the
target window as the camera approaches the target.
A similar approach exploiting binary classification
techniques is presented in [11], whereas in [15] a
deformable template representation accommodatingboth geometric and signature variability is discussed.
Target tracking in FLIR images has been
historically analyzed also as a template correlation
process [19], in which a template containing a
representative target signature is first initialized.
Tracking is then performed by trying to maximize
the matching with the above template. When target
signature does not exhibit significant temporal
evolution, after initialization the template can be
maintained unchanged for the whole tracking phase.
However, one of the main challenges in FLIR target
tracking is that two consecutive frames may exhibit
little correlation between regions of interest (i.e.,
image regions containing the target). In this scenario,
in order to prevent the template from becoming
stale (i.e., it no longer provides for an accurate
characterization of the observed target) specific
strategies addressing the so-called “template update
problem” have to be designed [12]. For instance, in
[14] and [16] a dual domain approach is presented
to improve tracking accuracy by automatically
detecting when a template update is needed through a
combination of pixel domain and modulation domain
correlation trackers. As the failure modes in the two
domains are rarely the same, the above technique
proved to be able to hold on the target in almost all
the considered frames from the experimental data set.
The tracking technique selected as a reference for
the present work represents an attractive solution to
the template update problem with a specific focus
on computational complexity saving [2, 3]. In fact,
a compact signature based on target IVF is generally
used for fast frame-to-frame detection and tracking.
When reliability of the IVF-based tracking cannot
be guaranteed, the TM phase is executed using an
up-to-date template. The above approach proved to be
capable of effectively dealing with challenging FLIR
sequences with low signal-to-noise ratios and high
ego-motion. Although tracking accuracy is strongly
dependent on the strategy used for activating the TM
phase, a high processing speed can be achieved by
getting rid of redundant image processing steps and
by minimizing the number of computations. Further
optimization approaches of the technique in [2, 3]
exploiting genetic algorithms and telemetry data based
ego-motion compensation strategies can be found in
[18] and [21], respectively.The approaches summarized above are generally
referred to as target representation and localizationbased techniques, as they follow a strategy that triesto identify target position based on its appearance.Alternative strategies, which are often used (possiblyin combination with the above techniques) arerepresented by the so-called filtering and dataassociation algorithms [6]. In this case, predictionstrategies are applied to estimate updated targetfeatures including, position, appearance, size, etc.
1468 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 47, NO. 2 APRIL 2011

Fig. 1. False alarms generated in tracking phases (black boxes), and correct target positions (white boxes). (a) Sequence mwir 1415,
frame 4. (b) Sequence lwir 1618, frame 9. (c)—(d) Sequence lwir 1608, frames 7 and 19.
Kalman filters have traditionally been used inautomatic target tracking with the aim of estimatingthe target kinematics [20, 8]. In [26], an adaptiveprediction method relying on a Kalman filter has beenintegrated into a mean-shift based tracking algorithmto adaptively predict the initial searching point.Recently, Kalman filters have also been employed fordesigning on-the-fly appearance learning algorithms[23]. An alternative to Kalman filters is representedby particle filters; despite their higher computationalcomplexity, they can provide for higher accuracy, thuspossibly resulting in improved tracking effectiveness.As a matter of example, in [5] dynamic models takinginto account target aspect change, target motion,and background clutter are combined to improvetracking performance and let the particle filter dealalso with strong ego-motion of the sensor. In [22] and[13], multiple particle filters are run concurrently toestimate target appearance and kinematics using astate vector encompassing target position, velocity,and size both in the pixel and modulation domains.The methodology presented in this work moves
from the strategies discussed above and is targetedat improving the robustness of tracking algorithmsrelying on the TM technique by incorporating anadaptive activation metric based on motion prediction.As the proposed approach builds upon a highperformance TD technique that aims at keepingcomputational complexity low by trying to limitthe overhead associated with the intervention ofthe TM algorithm, a probability-based strategyrelying on an efficient Kalman estimator is usedto control the activation of the recovery phase.Although in the current experimental setup, targetedto observer-in-the-loop high speed target trackingapplications, the selected prediction strategy provedto be capable of achieving effective performance,different filtering techniques could possibly beconsidered for dealing with alternative (e.g. withsensor-in-the-loop) scenarios.
III. FALSE ALARMS
In order to clarify the relation between the metric
for TM activation and the overall algorithm behavior,
before discussing the specific implementation and
introducing the designed strategy for improvement,
it is better to focus on the categories of false alarms
that may occur during the tracking phases.
Basically, the need for a recovery is generally due
to three main failures modes [9], which are illustrated
in Fig. 1 (making reference to sample frames from
sequences in the AMCOM data set). The first failure
mode (Fig. 1(a)) is related to abrupt discontinuities
in target position due to camera ego-motion. The
second failure mode (Fig. 1(b)) occurs when the
TD phase fails in determining the correct target
location (e.g., because of the presence of other targets
as well as of other unwanted image artifacts like
blurring, cluttering, intensity variation, etc.). Finally,
the third failure mode (Fig. 1(c)—(d)), known as the
“drifting problem” [10], is related to the behavior of
the TM phase. Specifically, when the TM technique
is activated, it uses information from the target in
the previously determined position to recover from
the false alarm. However, because of changes in
target shape, size, orientation, etc., a partially wrong
template can be gathered in some cases; when this
occurs over consecutive frames, small tracking errors
are accumulated and recovery leads to (ever more)
incorrect results.
In summary, on the one hand an effective
activation metric should allow the TM to intervene
all the times a false alarm belonging to the first and
second categories occurs. On the other hand, in
the above situations the metric should be capable
of detecting those cases in which the activation of
the TM technique would lead (possibly after some
frames) to a target loss due to the third failure mode.
Furthermore, in high speed tracking scenarios, the
TM activation metric should also take into account
the trade-off between algorithm robustness and
computational complexity.
IV. REFERENCE IMPLEMENTATION
In order to present the proposed technique and
compare it with existing approaches, the tracking
algorithm described in [3] was selected. It is worth
CORRESPONDENCE 1469

observing that, as the proposed approach deals with
the TM phase, it could be easily applied to other
works relying on a different implementation of the
TD phase. In [3], the detection phase is based, as in
many IR target tracking algorithms, on the hot spot
technique, which assumes that the target is brighter
than the background and noise effects. Specifically,
in order to determine the new target position, a
target intensity variation function characterizing the
similarity with respect to the local maximum value
describing the target in the previous frame is used.
The IVF technique requires two parameters to be
defined, i.e., the target window size and the subframe
size. The target window roughly corresponds to
the rectangular area including the target, while the
subframe defines the area where the target is searched
for in the new frame. The subframe size has to be
large enough to allow for abrupt camera movements
(in [3], it was set to 33£33 pixels).When tracking has to be performed on a given
frame n, the subframe is positioned at the reference
target location from the previous frame (pn¡1) and theintensity variation function Fn is computed for the
subframe matrix Sn as
Fn(v,z) =1
¤
lXj=1
kXi=1
jSn(i+ v,j+ z)¡!n¡1j (1)
where (v,z) are the spatial coordinates in the subframe
and ¤ is the size (k£ l) of the target window; finally,!n¡1 is defined as a 3£ 3 pixels matrix representingthe local maximum of the target window in the
previous (n¡ 1)th frame.To represent the candidate target coordinates in the
form of a peak value, an exponential function called
correlation output plane (CF) is used, which is defined
asCF(v,z) = e
¡¸Fn(v,z) (2)
where ¸ is a constant value and (v,z) represent the
coordinates of the target window in the subframe.
The CF generates the maximum peak (in the subframe
coordinate system) where the candidate target intensity
variation is close to that in the reference target
position. The coordinates of the peak are therefore
converted in the candidate target position p̄nIVF.
On the other hand, the TM technique can be
modeled as
Tn(v,z) =1
¤
lXj=1
kXi=1
jSn(i+ v,j+ z)¡Wn¡1j (3)
where (v,z), ¤, and (k, l) have the same meaning in
(1). However, in the TM phase, the target window
W is used instead of the local maximum window
matrix !. Although the use of the target window
increases the computational complexity, W provides
essential information concerning target shape. In fact,
being W defined as two to three pixels larger than the
Fig. 2. Application of reference tracking technique to sample
frame from sequence lwir 1520. (a) Frame 119. (b) Results
generated by IVF algorithm.
reference target size, it contains both target as well as
surrounding background information, which allows
to distinguish between target and nontarget objects.
As with the IVF technique, a correlation output plane
can be computed by using (2) and replacing Fn(v,z)
with Tn(v,z); the candidate target position p̄nTM is
then located where the correlation output plane yields
the maximum peak (after conversion in the image
coordinate system).
In Fig. 2, the application of the technique in [3] to
a sample frame from the AMCOM data set is shown.
The black box indicates the (wrong) candidate target
position generated by the IVF technique, whereas the
white box points out the real target position that can
be properly identified through the activation of the
TM-based recovery phase. The correlation output
planes resulting from the application of the IVF
and TM techniques are illustrated in Fig. 3. From
Fig. 3(a) it can be observed that the IVF technique
generated two peaks; the above ambiguity is properly
solved through the application of the TM algorithm
(Fig. 3(b)). It is worth observing that, although the use
of a larger neighborhood (e.g. 5£ 5, 7£ 7, etc.) in theIVF technique could possibly lead to different results,
in this work the high performance configuration used
in [3] was chosen to allow for a fair comparison.
In [3] the TM activation strategy relies on a
controller module that identifies the occurrence of a
false alarm in the TD phase by using a metric based
on the Euclidean distance ¯ (Fig. 4(a)) between the
candidate target position in the current frame (p̄nIVF)
and the reference target position in the previous frame
(pn¡1). If the distance exceeds a constant threshold(expressed in number of pixels) specified for the
considered image sequence, the TM phase is activated,
p̄nTM is computed, and the position closest to pn¡1 is
selected as the reference target position (i.e., either
p̄nIVF or p̄nTM). However, according to the authors,
finding the best criterion valid for all the sequences is
a task hard to accomplish. Thus, in [3] the threshold is
chosen by considering the trade-off between tracking
effectiveness and computational complexity. Although
1470 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 47, NO. 2 APRIL 2011
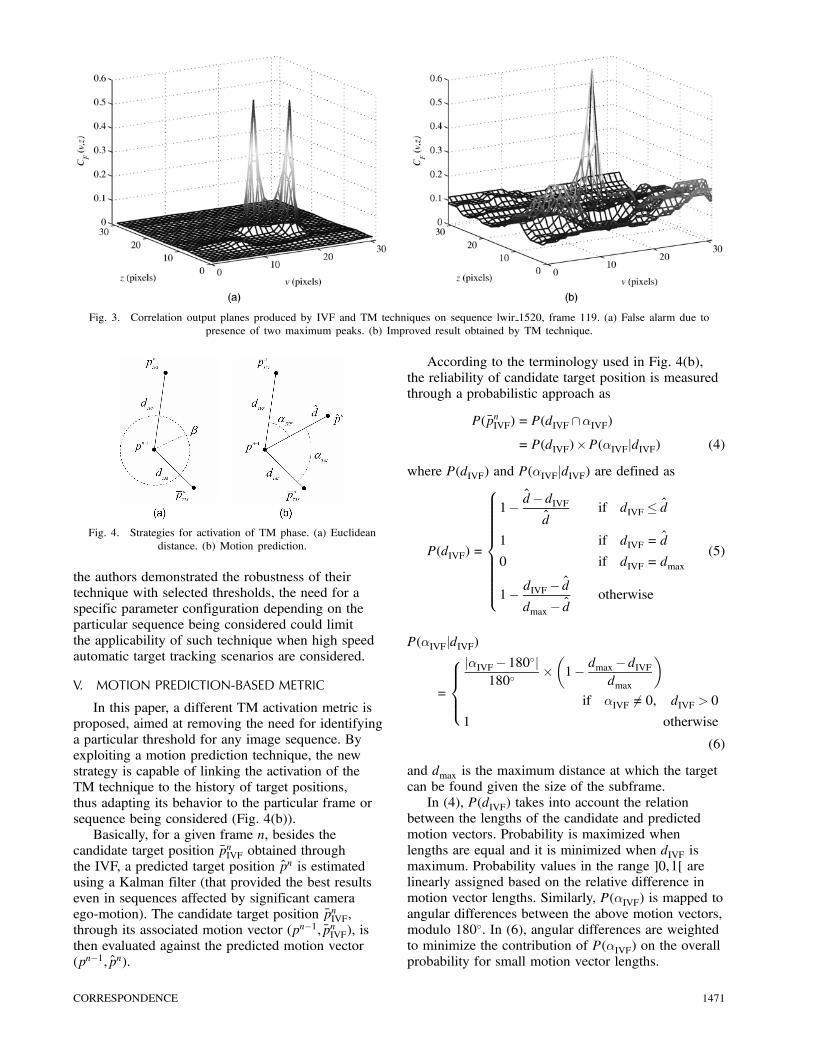
Fig. 3. Correlation output planes produced by IVF and TM techniques on sequence lwir 1520, frame 119. (a) False alarm due to
presence of two maximum peaks. (b) Improved result obtained by TM technique.
Fig. 4. Strategies for activation of TM phase. (a) Euclidean
distance. (b) Motion prediction.
the authors demonstrated the robustness of their
technique with selected thresholds, the need for a
specific parameter configuration depending on the
particular sequence being considered could limit
the applicability of such technique when high speed
automatic target tracking scenarios are considered.
V. MOTION PREDICTION-BASED METRIC
In this paper, a different TM activation metric is
proposed, aimed at removing the need for identifying
a particular threshold for any image sequence. By
exploiting a motion prediction technique, the new
strategy is capable of linking the activation of the
TM technique to the history of target positions,
thus adapting its behavior to the particular frame or
sequence being considered (Fig. 4(b)).
Basically, for a given frame n, besides the
candidate target position p̄nIVF obtained through
the IVF, a predicted target position p̂n is estimated
using a Kalman filter (that provided the best results
even in sequences affected by significant camera
ego-motion). The candidate target position p̄nIVF,
through its associated motion vector (pn¡1, p̄nIVF), isthen evaluated against the predicted motion vector
(pn¡1, p̂n).
According to the terminology used in Fig. 4(b),
the reliability of candidate target position is measured
through a probabilistic approach as
P(p̄nIVF) = P(dIVF \®IVF)= P(dIVF)£P(®IVFjdIVF) (4)
where P(dIVF) and P(®IVFjdIVF) are defined as
P(dIVF) =
8>>>>>>>>><>>>>>>>>>:
1¡ d̂¡ dIVFd̂
if dIVF · d̂
1 if dIVF = d̂
0 if dIVF = dmax
1¡ dIVF¡ d̂dmax¡ d̂
otherwise
(5)
P(®IVFjdIVF)
=
8>><>>:j®IVF¡ 180±j
180±£μ1¡ dmax¡ dIVF
dmax
¶if ®IVF 6= 0, dIVF > 0
1 otherwise
(6)
and dmax is the maximum distance at which the target
can be found given the size of the subframe.
In (4), P(dIVF) takes into account the relation
between the lengths of the candidate and predicted
motion vectors. Probability is maximized when
lengths are equal and it is minimized when dIVF is
maximum. Probability values in the range ]0,1[ are
linearly assigned based on the relative difference in
motion vector lengths. Similarly, P(®IVF) is mapped to
angular differences between the above motion vectors,
modulo 180±. In (6), angular differences are weightedto minimize the contribution of P(®IVF) on the overall
probability for small motion vector lengths.
CORRESPONDENCE 1471
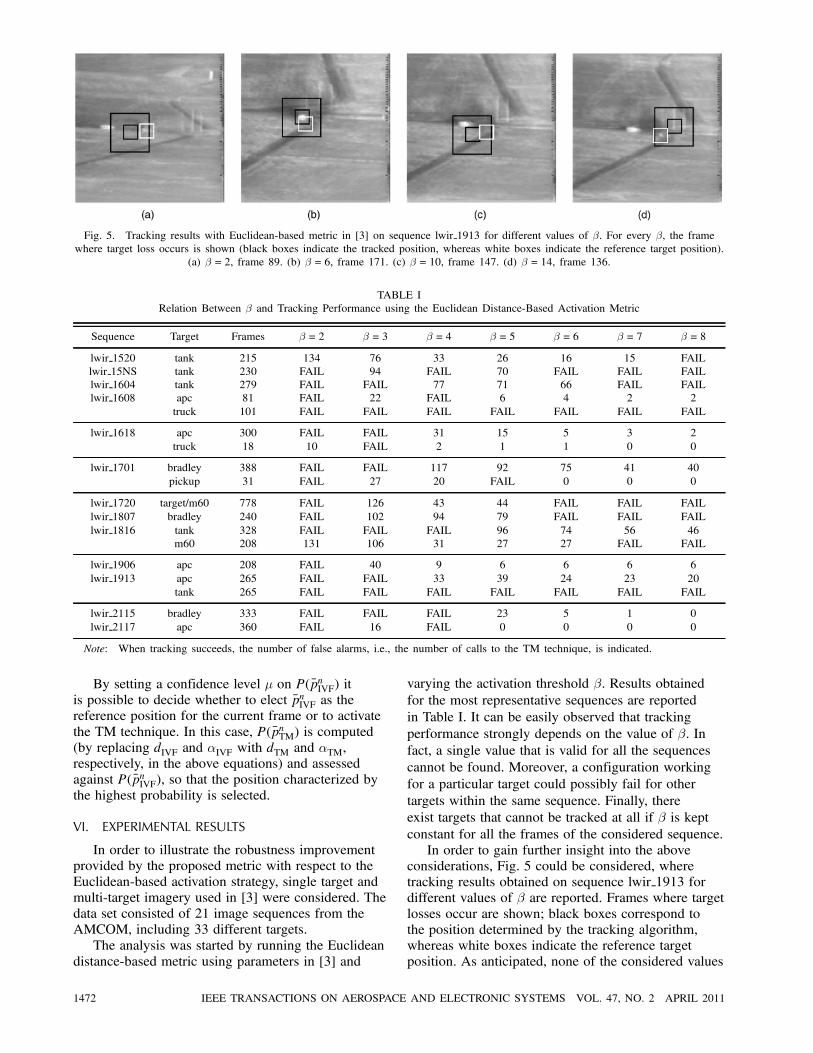
Fig. 5. Tracking results with Euclidean-based metric in [3] on sequence lwir 1913 for different values of ¯. For every ¯, the frame
where target loss occurs is shown (black boxes indicate the tracked position, whereas white boxes indicate the reference target position).
(a) ¯ = 2, frame 89. (b) ¯ = 6, frame 171. (c) ¯ = 10, frame 147. (d) ¯ = 14, frame 136.
TABLE I
Relation Between ¯ and Tracking Performance using the Euclidean Distance-Based Activation Metric
Sequence Target Frames ¯ = 2 ¯ = 3 ¯ = 4 ¯ = 5 ¯ = 6 ¯ = 7 ¯ = 8
lwir 1520 tank 215 134 76 33 26 16 15 FAIL
lwir 15NS tank 230 FAIL 94 FAIL 70 FAIL FAIL FAIL
lwir 1604 tank 279 FAIL FAIL 77 71 66 FAIL FAIL
lwir 1608 apc 81 FAIL 22 FAIL 6 4 2 2
truck 101 FAIL FAIL FAIL FAIL FAIL FAIL FAIL
lwir 1618 apc 300 FAIL FAIL 31 15 5 3 2
truck 18 10 FAIL 2 1 1 0 0
lwir 1701 bradley 388 FAIL FAIL 117 92 75 41 40
pickup 31 FAIL 27 20 FAIL 0 0 0
lwir 1720 target/m60 778 FAIL 126 43 44 FAIL FAIL FAIL
lwir 1807 bradley 240 FAIL 102 94 79 FAIL FAIL FAIL
lwir 1816 tank 328 FAIL FAIL FAIL 96 74 56 46
m60 208 131 106 31 27 27 FAIL FAIL
lwir 1906 apc 208 FAIL 40 9 6 6 6 6
lwir 1913 apc 265 FAIL FAIL 33 39 24 23 20
tank 265 FAIL FAIL FAIL FAIL FAIL FAIL FAIL
lwir 2115 bradley 333 FAIL FAIL FAIL 23 5 1 0
lwir 2117 apc 360 FAIL 16 FAIL 0 0 0 0
Note: When tracking succeeds, the number of false alarms, i.e., the number of calls to the TM technique, is indicated.
By setting a confidence level ¹ on P(p̄nIVF) it
is possible to decide whether to elect p̄nIVF as the
reference position for the current frame or to activate
the TM technique. In this case, P(p̄nTM) is computed
(by replacing dIVF and ®IVF with dTM and ®TM,
respectively, in the above equations) and assessed
against P(p̄nIVF), so that the position characterized by
the highest probability is selected.
VI. EXPERIMENTAL RESULTS
In order to illustrate the robustness improvement
provided by the proposed metric with respect to the
Euclidean-based activation strategy, single target and
multi-target imagery used in [3] were considered. The
data set consisted of 21 image sequences from the
AMCOM, including 33 different targets.
The analysis was started by running the Euclidean
distance-based metric using parameters in [3] and
varying the activation threshold ¯. Results obtained
for the most representative sequences are reported
in Table I. It can be easily observed that tracking
performance strongly depends on the value of ¯. In
fact, a single value that is valid for all the sequences
cannot be found. Moreover, a configuration working
for a particular target could possibly fail for other
targets within the same sequence. Finally, there
exist targets that cannot be tracked at all if ¯ is kept
constant for all the frames of the considered sequence.
In order to gain further insight into the above
considerations, Fig. 5 could be considered, where
tracking results obtained on sequence lwir 1913 for
different values of ¯ are reported. Frames where target
losses occur are shown; black boxes correspond to
the position determined by the tracking algorithm,
whereas white boxes indicate the reference target
position. As anticipated, none of the considered values
1472 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 47, NO. 2 APRIL 2011
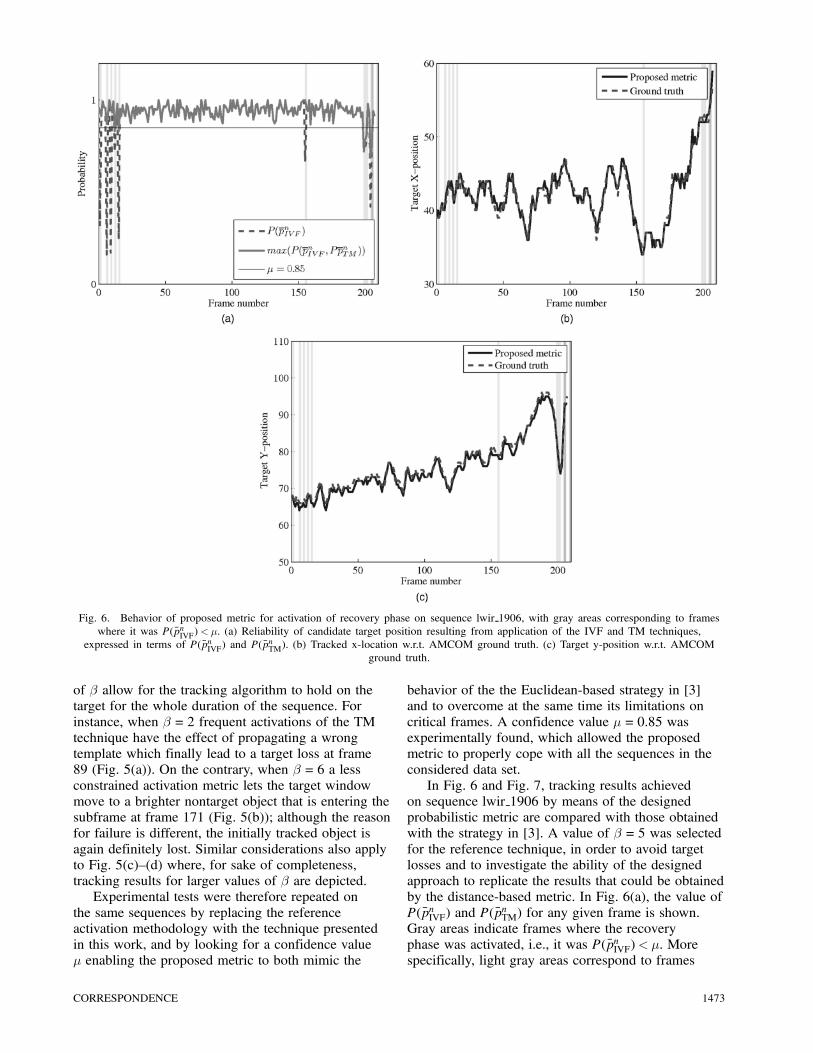
Fig. 6. Behavior of proposed metric for activation of recovery phase on sequence lwir 1906, with gray areas corresponding to frames
where it was P(p̄nIVF)< ¹. (a) Reliability of candidate target position resulting from application of the IVF and TM techniques,
expressed in terms of P(p̄nIVF) and P(p̄nTM). (b) Tracked x-location w.r.t. AMCOM ground truth. (c) Target y-position w.r.t. AMCOM
ground truth.
of ¯ allow for the tracking algorithm to hold on the
target for the whole duration of the sequence. For
instance, when ¯ = 2 frequent activations of the TM
technique have the effect of propagating a wrong
template which finally lead to a target loss at frame
89 (Fig. 5(a)). On the contrary, when ¯ = 6 a less
constrained activation metric lets the target window
move to a brighter nontarget object that is entering the
subframe at frame 171 (Fig. 5(b)); although the reason
for failure is different, the initially tracked object is
again definitely lost. Similar considerations also apply
to Fig. 5(c)—(d) where, for sake of completeness,
tracking results for larger values of ¯ are depicted.
Experimental tests were therefore repeated on
the same sequences by replacing the reference
activation methodology with the technique presented
in this work, and by looking for a confidence value
¹ enabling the proposed metric to both mimic the
behavior of the the Euclidean-based strategy in [3]
and to overcome at the same time its limitations on
critical frames. A confidence value ¹= 0:85 was
experimentally found, which allowed the proposed
metric to properly cope with all the sequences in the
considered data set.
In Fig. 6 and Fig. 7, tracking results achieved
on sequence lwir 1906 by means of the designed
probabilistic metric are compared with those obtained
with the strategy in [3]. A value of ¯ = 5 was selected
for the reference technique, in order to avoid target
losses and to investigate the ability of the designed
approach to replicate the results that could be obtained
by the distance-based metric. In Fig. 6(a), the value of
P(p̄nIVF) and P(p̄nTM) for any given frame is shown.
Gray areas indicate frames where the recovery
phase was activated, i.e., it was P(p̄nIVF)< ¹. More
specifically, light gray areas correspond to frames
CORRESPONDENCE 1473
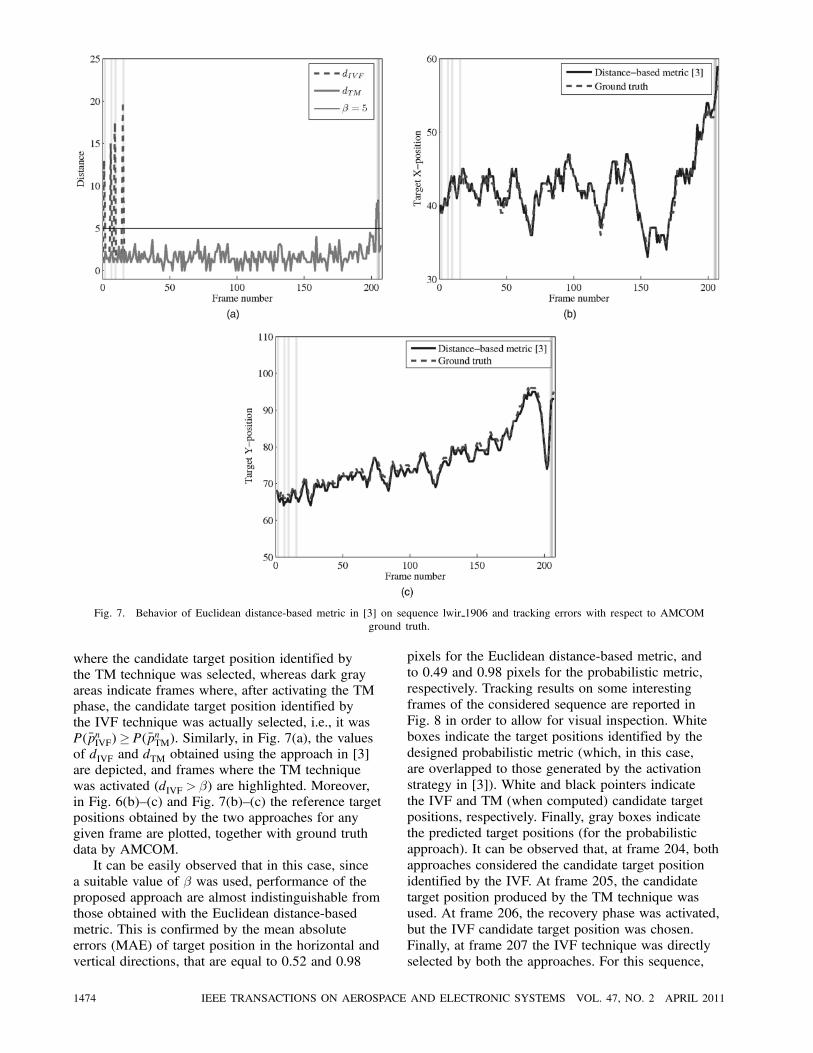
Fig. 7. Behavior of Euclidean distance-based metric in [3] on sequence lwir 1906 and tracking errors with respect to AMCOM
ground truth.
where the candidate target position identified by
the TM technique was selected, whereas dark gray
areas indicate frames where, after activating the TM
phase, the candidate target position identified by
the IVF technique was actually selected, i.e., it was
P(p̄nIVF)¸ P(p̄nTM). Similarly, in Fig. 7(a), the valuesof dIVF and dTM obtained using the approach in [3]
are depicted, and frames where the TM technique
was activated (dIVF > ¯) are highlighted. Moreover,
in Fig. 6(b)—(c) and Fig. 7(b)—(c) the reference target
positions obtained by the two approaches for any
given frame are plotted, together with ground truth
data by AMCOM.
It can be easily observed that in this case, since
a suitable value of ¯ was used, performance of the
proposed approach are almost indistinguishable from
those obtained with the Euclidean distance-based
metric. This is confirmed by the mean absolute
errors (MAE) of target position in the horizontal and
vertical directions, that are equal to 0.52 and 0.98
pixels for the Euclidean distance-based metric, and
to 0.49 and 0.98 pixels for the probabilistic metric,
respectively. Tracking results on some interesting
frames of the considered sequence are reported in
Fig. 8 in order to allow for visual inspection. White
boxes indicate the target positions identified by the
designed probabilistic metric (which, in this case,
are overlapped to those generated by the activation
strategy in [3]). White and black pointers indicate
the IVF and TM (when computed) candidate target
positions, respectively. Finally, gray boxes indicate
the predicted target positions (for the probabilistic
approach). It can be observed that, at frame 204, both
approaches considered the candidate target position
identified by the IVF. At frame 205, the candidate
target position produced by the TM technique was
used. At frame 206, the recovery phase was activated,
but the IVF candidate target position was chosen.
Finally, at frame 207 the IVF technique was directly
selected by both the approaches. For this sequence,
1474 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 47, NO. 2 APRIL 2011
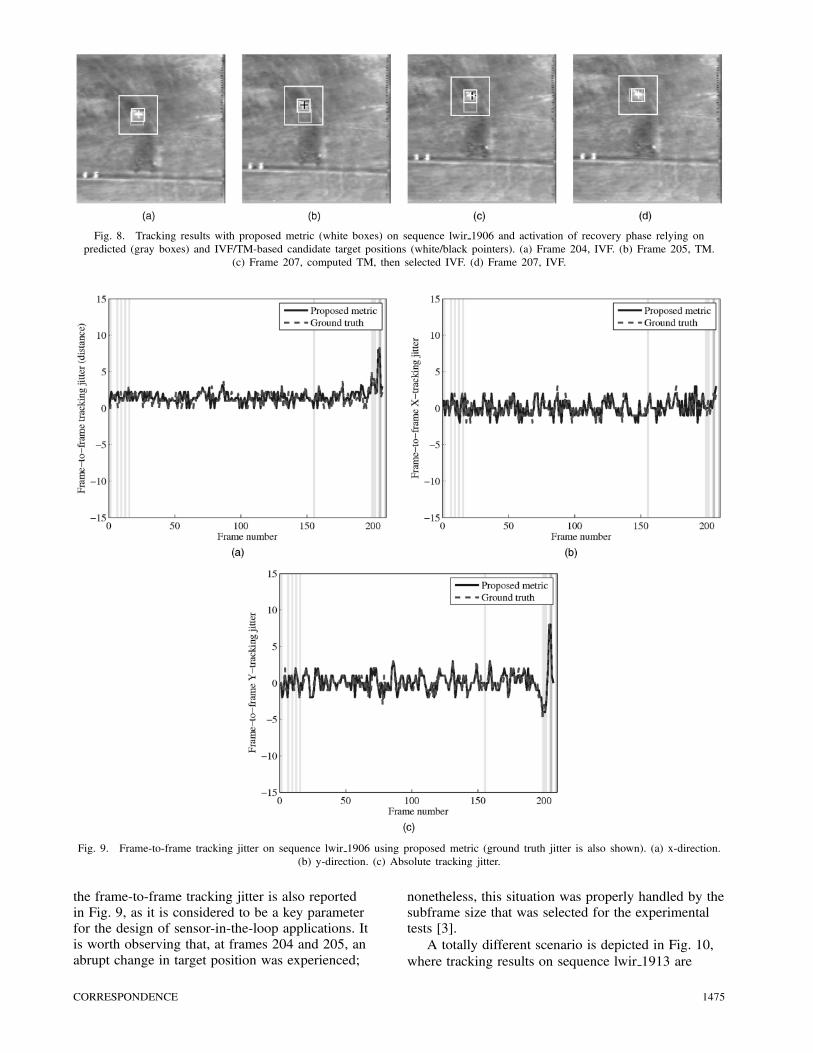
Fig. 8. Tracking results with proposed metric (white boxes) on sequence lwir 1906 and activation of recovery phase relying on
predicted (gray boxes) and IVF/TM-based candidate target positions (white/black pointers). (a) Frame 204, IVF. (b) Frame 205, TM.
(c) Frame 207, computed TM, then selected IVF. (d) Frame 207, IVF.
Fig. 9. Frame-to-frame tracking jitter on sequence lwir 1906 using proposed metric (ground truth jitter is also shown). (a) x-direction.
(b) y-direction. (c) Absolute tracking jitter.
the frame-to-frame tracking jitter is also reported
in Fig. 9, as it is considered to be a key parameter
for the design of sensor-in-the-loop applications. It
is worth observing that, at frames 204 and 205, an
abrupt change in target position was experienced;
nonetheless, this situation was properly handled by the
subframe size that was selected for the experimental
tests [3].
A totally different scenario is depicted in Fig. 10,
where tracking results on sequence lwir 1913 are
CORRESPONDENCE 1475
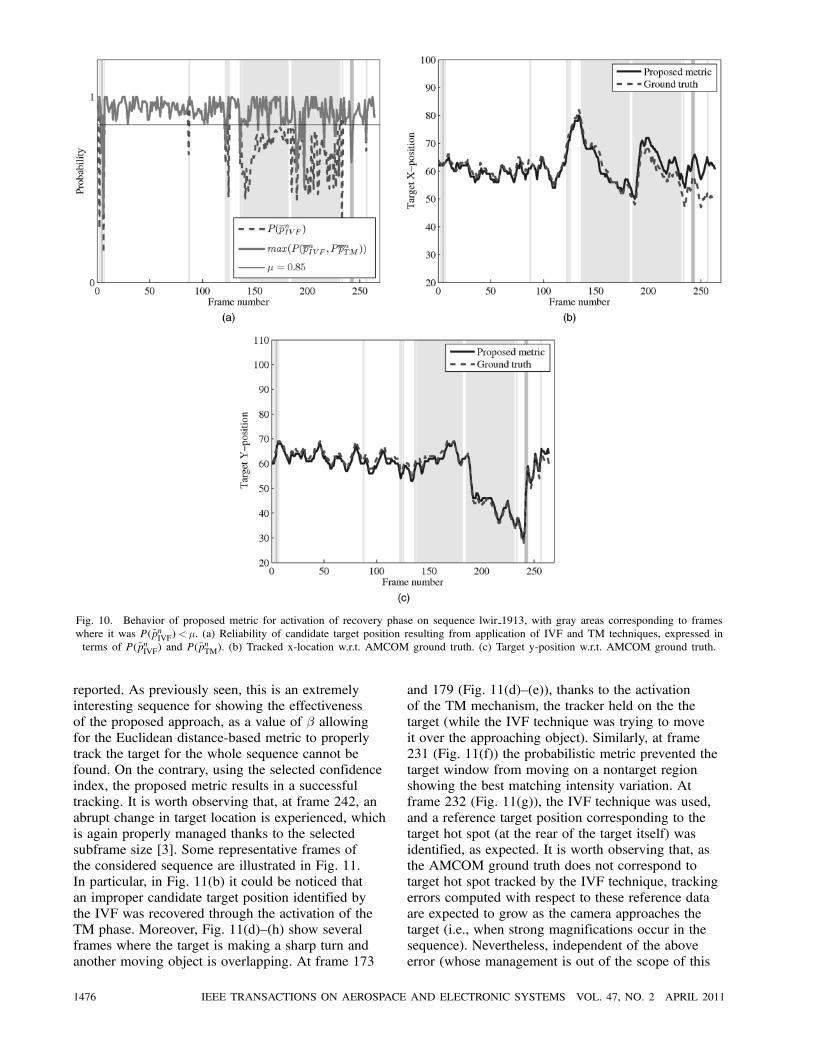
Fig. 10. Behavior of proposed metric for activation of recovery phase on sequence lwir 1913, with gray areas corresponding to frames
where it was P(p̄nIVF)< ¹. (a) Reliability of candidate target position resulting from application of IVF and TM techniques, expressed in
terms of P(p̄nIVF) and P(p̄nTM). (b) Tracked x-location w.r.t. AMCOM ground truth. (c) Target y-position w.r.t. AMCOM ground truth.
reported. As previously seen, this is an extremely
interesting sequence for showing the effectiveness
of the proposed approach, as a value of ¯ allowing
for the Euclidean distance-based metric to properly
track the target for the whole sequence cannot be
found. On the contrary, using the selected confidence
index, the proposed metric results in a successful
tracking. It is worth observing that, at frame 242, an
abrupt change in target location is experienced, which
is again properly managed thanks to the selected
subframe size [3]. Some representative frames of
the considered sequence are illustrated in Fig. 11.
In particular, in Fig. 11(b) it could be noticed that
an improper candidate target position identified by
the IVF was recovered through the activation of the
TM phase. Moreover, Fig. 11(d)—(h) show several
frames where the target is making a sharp turn and
another moving object is overlapping. At frame 173
and 179 (Fig. 11(d)—(e)), thanks to the activation
of the TM mechanism, the tracker held on the the
target (while the IVF technique was trying to move
it over the approaching object). Similarly, at frame
231 (Fig. 11(f)) the probabilistic metric prevented the
target window from moving on a nontarget region
showing the best matching intensity variation. At
frame 232 (Fig. 11(g)), the IVF technique was used,
and a reference target position corresponding to the
target hot spot (at the rear of the target itself) was
identified, as expected. It is worth observing that, as
the AMCOM ground truth does not correspond to
target hot spot tracked by the IVF technique, tracking
errors computed with respect to these reference data
are expected to grow as the camera approaches the
target (i.e., when strong magnifications occur in the
sequence). Nevertheless, independent of the above
error (whose management is out of the scope of this
1476 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 47, NO. 2 APRIL 2011
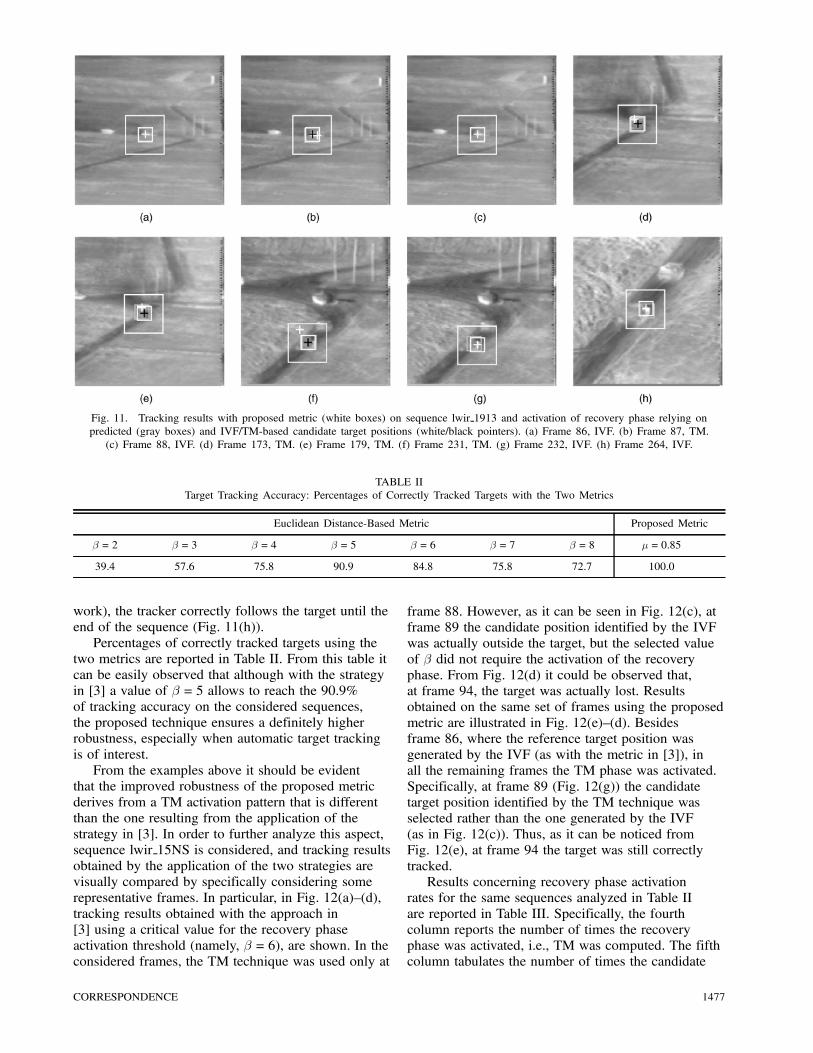
Fig. 11. Tracking results with proposed metric (white boxes) on sequence lwir 1913 and activation of recovery phase relying on
predicted (gray boxes) and IVF/TM-based candidate target positions (white/black pointers). (a) Frame 86, IVF. (b) Frame 87, TM.
(c) Frame 88, IVF. (d) Frame 173, TM. (e) Frame 179, TM. (f) Frame 231, TM. (g) Frame 232, IVF. (h) Frame 264, IVF.
TABLE II
Target Tracking Accuracy: Percentages of Correctly Tracked Targets with the Two Metrics
Euclidean Distance-Based Metric Proposed Metric
¯ = 2 ¯ = 3 ¯ = 4 ¯ = 5 ¯ = 6 ¯ = 7 ¯ = 8 ¹= 0:85
39.4 57.6 75.8 90.9 84.8 75.8 72.7 100.0
work), the tracker correctly follows the target until the
end of the sequence (Fig. 11(h)).
Percentages of correctly tracked targets using the
two metrics are reported in Table II. From this table it
can be easily observed that although with the strategy
in [3] a value of ¯ = 5 allows to reach the 90.9%
of tracking accuracy on the considered sequences,
the proposed technique ensures a definitely higher
robustness, especially when automatic target tracking
is of interest.
From the examples above it should be evident
that the improved robustness of the proposed metric
derives from a TM activation pattern that is different
than the one resulting from the application of the
strategy in [3]. In order to further analyze this aspect,
sequence lwir 15NS is considered, and tracking results
obtained by the application of the two strategies are
visually compared by specifically considering some
representative frames. In particular, in Fig. 12(a)—(d),
tracking results obtained with the approach in
[3] using a critical value for the recovery phase
activation threshold (namely, ¯ = 6), are shown. In the
considered frames, the TM technique was used only at
frame 88. However, as it can be seen in Fig. 12(c), at
frame 89 the candidate position identified by the IVF
was actually outside the target, but the selected value
of ¯ did not require the activation of the recovery
phase. From Fig. 12(d) it could be observed that,
at frame 94, the target was actually lost. Results
obtained on the same set of frames using the proposed
metric are illustrated in Fig. 12(e)—(d). Besides
frame 86, where the reference target position was
generated by the IVF (as with the metric in [3]), in
all the remaining frames the TM phase was activated.
Specifically, at frame 89 (Fig. 12(g)) the candidate
target position identified by the TM technique was
selected rather than the one generated by the IVF
(as in Fig. 12(c)). Thus, as it can be noticed from
Fig. 12(e), at frame 94 the target was still correctly
tracked.
Results concerning recovery phase activation
rates for the same sequences analyzed in Table II
are reported in Table III. Specifically, the fourth
column reports the number of times the recovery
phase was activated, i.e., TM was computed. The fifth
column tabulates the number of times the candidate
CORRESPONDENCE 1477
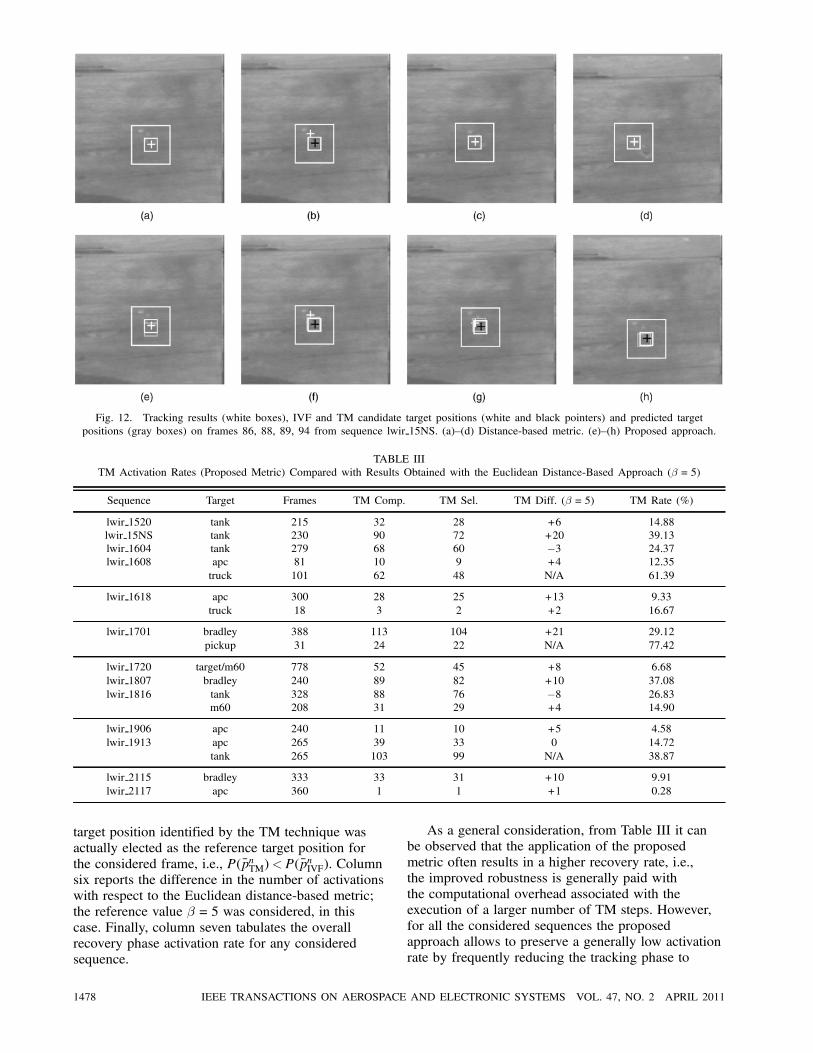
Fig. 12. Tracking results (white boxes), IVF and TM candidate target positions (white and black pointers) and predicted target
positions (gray boxes) on frames 86, 88, 89, 94 from sequence lwir 15NS. (a)—(d) Distance-based metric. (e)—(h) Proposed approach.
TABLE III
TM Activation Rates (Proposed Metric) Compared with Results Obtained with the Euclidean Distance-Based Approach (¯ = 5)
Sequence Target Frames TM Comp. TM Sel. TM Diff. (¯ = 5) TM Rate (%)
lwir 1520 tank 215 32 28 +6 14.88
lwir 15NS tank 230 90 72 +20 39.13
lwir 1604 tank 279 68 60 ¡3 24.37
lwir 1608 apc 81 10 9 +4 12.35
truck 101 62 48 N/A 61.39
lwir 1618 apc 300 28 25 +13 9.33
truck 18 3 2 +2 16.67
lwir 1701 bradley 388 113 104 +21 29.12
pickup 31 24 22 N/A 77.42
lwir 1720 target/m60 778 52 45 +8 6.68
lwir 1807 bradley 240 89 82 +10 37.08
lwir 1816 tank 328 88 76 ¡8 26.83
m60 208 31 29 +4 14.90
lwir 1906 apc 240 11 10 +5 4.58
lwir 1913 apc 265 39 33 0 14.72
tank 265 103 99 N/A 38.87
lwir 2115 bradley 333 33 31 +10 9.91
lwir 2117 apc 360 1 1 +1 0.28
target position identified by the TM technique was
actually elected as the reference target position for
the considered frame, i.e., P(p̄nTM)< P(p̄nIVF). Column
six reports the difference in the number of activations
with respect to the Euclidean distance-based metric;
the reference value ¯ = 5 was considered, in this
case. Finally, column seven tabulates the overall
recovery phase activation rate for any considered
sequence.
As a general consideration, from Table III it can
be observed that the application of the proposed
metric often results in a higher recovery rate, i.e.,
the improved robustness is generally paid with
the computational overhead associated with the
execution of a larger number of TM steps. However,
for all the considered sequences the proposed
approach allows to preserve a generally low activation
rate by frequently reducing the tracking phase to
1478 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 47, NO. 2 APRIL 2011
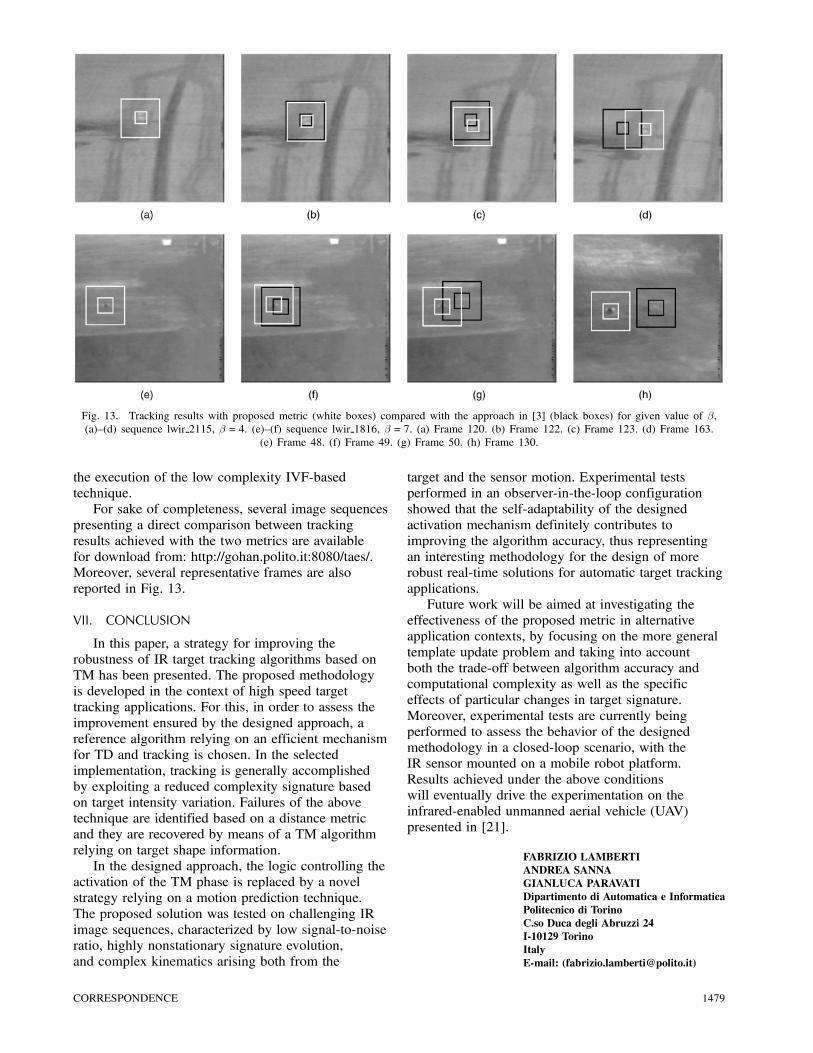
Fig. 13. Tracking results with proposed metric (white boxes) compared with the approach in [3] (black boxes) for given value of ¯,
(a)—(d) sequence lwir 2115, ¯ = 4. (e)—(f) sequence lwir 1816, ¯ = 7. (a) Frame 120. (b) Frame 122. (c) Frame 123. (d) Frame 163.
(e) Frame 48. (f) Frame 49. (g) Frame 50. (h) Frame 130.
the execution of the low complexity IVF-based
technique.
For sake of completeness, several image sequences
presenting a direct comparison between tracking
results achieved with the two metrics are available
for download from: http://gohan.polito.it:8080/taes/.
Moreover, several representative frames are also
reported in Fig. 13.
VII. CONCLUSION
In this paper, a strategy for improving the
robustness of IR target tracking algorithms based on
TM has been presented. The proposed methodology
is developed in the context of high speed target
tracking applications. For this, in order to assess the
improvement ensured by the designed approach, a
reference algorithm relying on an efficient mechanism
for TD and tracking is chosen. In the selected
implementation, tracking is generally accomplished
by exploiting a reduced complexity signature based
on target intensity variation. Failures of the above
technique are identified based on a distance metric
and they are recovered by means of a TM algorithm
relying on target shape information.
In the designed approach, the logic controlling the
activation of the TM phase is replaced by a novel
strategy relying on a motion prediction technique.
The proposed solution was tested on challenging IR
image sequences, characterized by low signal-to-noise
ratio, highly nonstationary signature evolution,
and complex kinematics arising both from the
target and the sensor motion. Experimental tests
performed in an observer-in-the-loop configuration
showed that the self-adaptability of the designed
activation mechanism definitely contributes to
improving the algorithm accuracy, thus representing
an interesting methodology for the design of more
robust real-time solutions for automatic target tracking
applications.
Future work will be aimed at investigating the
effectiveness of the proposed metric in alternative
application contexts, by focusing on the more general
template update problem and taking into account
both the trade-off between algorithm accuracy and
computational complexity as well as the specific
effects of particular changes in target signature.
Moreover, experimental tests are currently being
performed to assess the behavior of the designed
methodology in a closed-loop scenario, with the
IR sensor mounted on a mobile robot platform.
Results achieved under the above conditions
will eventually drive the experimentation on the
infrared-enabled unmanned aerial vehicle (UAV)
presented in [21].
FABRIZIO LAMBERTI
ANDREA SANNA
GIANLUCA PARAVATI
Dipartimento di Automatica e Informatica
Politecnico di Torino
C.so Duca degli Abruzzi 24
I-10129 Torino
Italy
E-mail: ([email protected])
CORRESPONDENCE 1479
REFERENCES
[1] Alam, M. S. and Bal, A.Improved multiple target tracking via global motion
compensation and optoelectronic correlation.
IEEE Transactions on Industrial Electronics, 54, 1 (2007),522—529.
[2] Alam, M. S. and Bal, A.
Automatic target tracking in FLIR image sequences.
In Proceedings of SPIE, Automatic Target Recognition
XIV, vol. 5426, 2004, 30—36.
[3] Bal, A. and Alam, M. S.
Automatic target tracking in FLIR image sequences using
intensity variation function and template modeling.
IEEE Transactions on Instrumentation and Measurement,54, 5 (2005), 1846—1852.
[4] Braga-Neto, U., Choudhary, M., and Goutsias, J.
Automatic target detection and tracking in
forward-looking infrared image sequences usingmorphological connected operators.
Journal of Electronic Imaging, 13, 4 (2004), 802—813.
[5] Bruno, M. G. S.
Bayesian methods for multiaspect target tracking in imagesequences.
IEEE Transactions on Signal Processing, 52, 7 (2004),1848—1861.
[6] Comaniciu, D., Ramesh, V., and Meer, P.Kernel-based object tracking.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 25, 5 (2003), 564—577.
[7] Comaniciu, D., Ramesh, V., and Meer, P.
Real-time tracking of non-rigid objects using mean shift.Computer Vision and Pattern Recognition, 2 (2000),142—149.
[8] Davies, D., Palmer, P., and Mirmehdi, M.
Detection and tracking of very small low contrast objects.In Proceedings of the 9th British Machine Vision
Conference, 1998, 599—608.
[9] Dawoud, A., Alam, M. S., and Bal, A.
Target tracking in infrared imagery using weightedcomposite reference function-based decision fusion.
IEEE Transactions on Image Processing, 15, 2 (2006),404—410.
[10] Han, T. S., Liu, M., and Huang, T. S.A drifting-proof framework for tracking and online
appearance learning.
In Proceedings of the 8th IEEE Workshop on Applications
of Computer Vision, 2007, 10.
[11] Hu, T., Liu, E., and Yang, J.
Multi-feature based ensemble classification and regression
tree (ECART) for target tracking in infrared imagery.
Journal of Infrared, Millimeter and Terahertz Waves, 30, 5(2009), 484—495.
[12] Iain, M., Ishikawa, T., and Baker, S.
The template update problem.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 26, 6 (2004), 810—815.
[13] Johnston, C. M., Mould, N., A., and Havlicek, J. P.
Multichannel dual domain infrared target tracking for
highly evolutionary target signatures.In Proceedings of the 16th IEEE International Conference
on Image Processing, 2009, 4117—4120.
[14] Johnston, C. M., Mould, N., and Havlicek, J. P.
Dual domain auxiliary particle filter with integrated target
signature update.In Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition Workshops,
2009, 54—59.
[15] Miller, P. C., Royce, M., and Virgo, P.Evaluation of an optical correlator target recognition
system for acquisition and tracking in densely cluttered
natural scenes.
Optical Engineering, 38, 11 (1999), 1814—1825.
[16] Mould, N. A., Nguyen, C. T., and Havlicek, J. P.
Infrared target tracking with AM-FM consistency checks.In Proceedings of the IEEE Southwest Symposium on
Image Analysis and Interpretation, 2008, 5—8.
[17] Nummiaro, K., Koller-Meier, E., and Van Gool, L.
An adaptive color-based particle filter.
Image Vision Computing, 21 (2003), 99—110.
[18] Paravati, G., Sanna, A., and Pralio, B.
A genetic algorithm for target tracking in FLIR video
sequences using intensity variation function.IEEE Transactions on Instrumentation and Measurement,
58, 10 (2009), 3457—3467.
[19] Parry, H. S., Marshall, A., and Markham, K. C.
Tracking targets in FLIR images by region template
correlation.In Proceedings of SPIE, Acquisition, Tracking, and
Pointing XI, vol. 3086, 1997, 221—232.
[20] Salmond, D.
Target tracking: Introduction and Kalman tracking filters.
In Proceedings of the IEE Workshop on Target Tracking:
Algorithms and Applications, 2001, 1—16.
[21] Sanna, A., Pralio, B., and Lamberti, F.A novel ego-motion compensation strategy for automatic
target tracking in FLIR video sequences taken from
UAVs.
IEEE Transactions on Aerospace and Electronic Systems,45, 2 (2009), 723—734.
[22] Venkataraman, V., Guoliang, F., and Xin, F.Target tracking with online feature selection in FLIR
imagery.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, 2007, 1—8.
[23] Venkataraman, V., Fan, G., and Fan, V.
Appearance learning by adaptive Kalman filters for FLIRtracking.
In Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition Workshops,
2009, 46—53.
[24] Xin, H.A novel infrared target detection and tracking algorithm
based on morphological filters.
In Proceedings of the International Workshop on
Information Security and Application, 2009, 260—263.
[25] Wei, C. and Jiang, S.
Automatic target detection and tracking in FLIR imagesequences using morphological connected operator.
In Proceedings of the International Conference on
Intelligent Information Hiding and Multimedia Signal
Processing, 2008, 414—417.
[26] Yang, W., Li, J., and Shi, D.Mean shift based target tracking in FLIR imagery via
adaptive prediction of initial searching points.
In Proceedings of the 2nd International Symposium on
Intelligent Information Technology Application, 2008,852—855.
[27] Yin, Y. and Man, H.Adaptive mean shift for target-tracking in FLIR imagery.
In Proceedings of the18th Annual Conference on Wireless
and Optical Communications, 2009, 1—3.
[28] Yilmaz, A., Shafique, K., and Lobo, N.
Target-tracking in FLIR imagery using mean-shift and
global motion compensation.In Proceedings of the IEEE Workshop on Computer Vision
Beyond the Visible Spectrum, 2001, 54—58.
[29] Yilmaz, A., Shafique, K., and Shah, M.
Tracking in airborne forward looking infrared imagery.
Image and Vision Computing Journal, 21, 7 (2003),623—635.
[30] Yilmaz, A., Li, X., and Shah, M.Object contour tracking using level sets.
In Proceedings of the Asian Conference on Computer
Vision, 2004.
1480 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 47, NO. 2 APRIL 2011
Related Documents











