9 September 2008 Implementation of a gas-kinetic BGK solver in the elsA code Markus Boger Projet de fin d’´ etudes Tutors at CERFACS : Hugues Deniau Guillaume Puigt Tutor at ISAE-SUPAERO : Jean-Marc Moschetta Tutor at Universit¨ at Stuttgart : Thorsten Lutz CERFACS - CFD - 42, avenue Gaspard Coriolis - 31057 Toulouse Cedex 1 R´ ef´ erence CERFACS : WN/CFD/08/84

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

9 September 2008
Implementation of a gas-kinetic BGK solver
in the elsA code
Markus Boger
Projet de fin d’etudes
Tutors at CERFACS : Hugues DeniauGuillaume Puigt
Tutor at ISAE-SUPAERO : Jean-Marc MoschettaTutor at Universitat Stuttgart : Thorsten Lutz
CERFACS - CFD - 42, avenue Gaspard Coriolis - 31057 Toulouse Cedex 1Reference CERFACS : WN/CFD/08/84


Abstract
This report deals with a gas-kinetic BGK scheme (based on the Bhatnagar-Gross-Krook model)for inviscid and viscous flow fields that is implemented in the elsA code. In a first step, somegeneral remarks concerning the finite volume method and the relations between hydrodynamicsand the gas-kinetic theory are made. Then the exact formulations for the kinetic solver of Xu areelaborated and presented in a circumstantial way, including a Prandtl number correction to enablethe scheme to compute flows with arbitrary Prandtl number. Besides the main model of Xu, twoother gas-kinetic schemes are presented. They are also based on the original model, but containsimplifications. Furthermore, the author elaborates a BGK scheme of higher order by modifyingthe development of the gas distribution functions. An overview of the schemes’ implementation inthe elsA code is given. Afterwards, the schemes are validated with several numerical test cases.They are ranging from inviscid one-dimensional shock tube problems to three-dimensional viscousturbulent flows.

Acknowledgment
I would like to express my gratitude to all those who supported me during my final year projectat CERFACS. Especially, I want to thank my tutors Hugues Deniau and Guillaume Puigt for thetime they spent on supervising my work and the excellent support they gave me. I also would liketo thank them for revising this report. Furthermore, I express my appreciation to the whole CFDteam for the agreeable working atmosphere at CERFACS.
Moreover, I would like to express my thankfullness to my supervisors Jean-Marc Moschetta (ISAE-SUPAERO) and Thorsten Lutz (Universitat Stuttgart) for their mentoring throughout the courseof my work.

Contents
Nomenclature vii
1 Introduction 1
2 The basic notion of the finite volume method 3
2.1 The MUSCL scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Slope calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.2 Slope limitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.3 Reconstruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Relation between hydrodynamics and gas-kinetic theory 9
4 The BGK scheme of Xu 11
4.1 The Equilibrium Flux Method (EFM) . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.2 The Totally Thermalized Transport Model (TTT) . . . . . . . . . . . . . . . . . . . 12
4.3 Partial conclusion of EFM and TTT . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.4 The architecture of the Xu model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.4.1 The initial distribution function f0 . . . . . . . . . . . . . . . . . . . . . . . . 15
4.4.2 The equilibrium distribution g . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.4.3 The flux evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
iii

4.4.4 The Prandtl number correction . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.5 The collision time τ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.5.1 Determination of the particle collision time τ . . . . . . . . . . . . . . . . . . 25
4.5.2 Determination of the particle collision time τ by use of the mean free path . 25
5 The simplified BGK model of May 27
6 A gas-kinetic BGK scheme of higher order 29
6.1 Determination of the coefficients for the initial gas distribution function f0 . . . . . . 30
6.2 Determination of the coefficients for the relaxation state function g . . . . . . . . . . 31
6.3 Computation of the coefficients b and b . . . . . . . . . . . . . . . . . . . . . . . . . . 34
7 Implementation of the BGK scheme in the elsA code 37
7.1 Coding of the BGK scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
7.1.1 Initialization of the computation . . . . . . . . . . . . . . . . . . . . . . . . . 38
7.1.2 The different computational algorithms . . . . . . . . . . . . . . . . . . . . . 38
8 Numerical experiments 43
8.1 Inviscid flow test cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
8.1.1 Shock tube problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
8.1.2 Inviscid flow around the NACA0012 airfoil . . . . . . . . . . . . . . . . . . . 49
8.1.3 Inviscid flow around the RAE2822 airfoil . . . . . . . . . . . . . . . . . . . . 54
8.2 Viscous flow test cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
8.2.1 Flat plate with laminar boundary layer . . . . . . . . . . . . . . . . . . . . . 57
8.2.2 Flat plate with turbulent boundary layer . . . . . . . . . . . . . . . . . . . . 62
8.2.3 The RAE2822 airfoil in viscous flow with a turbulent boundary layer . . . . . 64
iv

8.2.4 The LANN wing in viscous flow with a turbulent boundary layer . . . . . . . 69
9 Conclusion and perspectives 73
Bibliography 75
Appendix:
A The Chapman-Enskog Expansion of the BGK Equation 77
B Moments of the Maxwellian Distribution Function 79
C The right hand side of the equation system for the coefficients A 83
D The evaluated Flux Components 89
E The Prandtl number correction 95
F The LUSSORSCA implicit method of elsA 99
v

vi

Nomenclature
Latin letters
al,r [1/m] Coefficients for the development of the initial gas distribution function
Al,r [1/s] Coefficients for the development of the initial gas distribution function
al,r [1/m] Coefficients for the development of the equilibrium state
A [1/s] Coefficients for the development of the equilibrium state
A [1/s] Coefficients for the initial gas distribution and the equilibrium state (BGKgg)
bl,r [1/m2] Coefficients for the development of the initial gas distribution function
in the case of the higher order schemebl,r [1/m2] Coefficients for the development of the equilibrium state in the case of the
higher order schemeB [1/s2] Coefficients for the development of the equilibrium state in the case of the
higher order schemeC l,r [1/(ms)] Coefficients for the development of the initial gas distribution function
in the case of the higher order schemeC [1/(ms)] Coefficients for the development of the equilibrium state in the case of the
higher order schemeE [kg/(s2m)] Energy density
f [-] Gas distribution function
f0 [-] Initial gas distribution function
F [-] Numerical flux
g [-] Equilibrium state
g0 [-] Local Maxwellian distribution at the cell interface
k [J/K] Boltzmann constant
K [-] Degrees of freedom
l [m] Mean free path
M [-] Mach number
m,n, o [kg/(m2s)] Momentum densities
p [Pa] Static pressure
Pr [-] Prandtl number
vii

q [W/m2] Heat flux
Q(f, f) [-] Collision operator
R [J/(kgK)] Specific gas constant
Re [-] Reynolds number
S [K] Sutherland constant
t [s] Time
T [K] Temperature
u, v, w [m/s] Individual particle velocities in x, y and z-direction
u [m/s] Mean particle velocity
U, V,W [m/s] Macroscopic flow velocities in x, y and z-direction
U , V , W [m/s] Mean macroscopic flow velocities in x, y and z-direction
for the Prandtl number correction~w [-] State vector containing the conservative variables
~w0 [-] Reconstructed state vector at the cell interface containing
the conservative variablesx, y, z [m] Cartesian coordinates
Greek letters
α [] Angle of attack
βi [-] Constants for the modification of the collision time
∆t [s] Time step
η [-] Blasius variable
γ [-] Heat capacity ratio
λ [1/J ] Reciprocal internal energy
µ [Pas] Dynamic viscosity
ξ [m/s] Internal velocity
ρ [kg/m3] Density
σ [m] Particle diameter
τ [s] Particle collision time
~Ψ [-] Vector of moments
viii

Chapter 1
Introduction
In contemporary computational fluid dynamics, the Navier-Stokes equations are usually solved withthe help of up-winding or centred schemes. The standard scheme is separating the diffusive termsfrom the convective ones by first solving the inviscid Euler equations and separately calculating theviscous part in a second step by using e.g. a central difference method.This standard procedure is well established and one can obtain excellent results with it. Yet, inthis report a different approach for the numerical solution of the Navier-Stokes equations, basedon the gas-kinetic theory, is presented. The basic idea of the gas-kinetic theory is to describe themacroscopic flow properties with the help of microscopic considerations. This theory is based onthe Boltzmann equation, which is more fundamental than the Navier-Stokes equations. It is theso-called Chapman-Enskog expansion that allows to derive the Navier-Stokes equations from theBoltzmann equation.In principle, this proceeding offers several advantages. First of all, by using the gas-kinetic ap-proach, all macroscopic flow variables are directly dependent on a single particle distribution, asthey can be obtained as the moments of this distribution. Consequently one is no longer in needto separate the computation of an inviscid part and a viscous one, but gets directly the desiredvariables by the calculation of the distribution moments.Furthermore, this approach can be considered as being closer to the real physical phenomena.Unlike the up-winding schemes that determine the fluxes across the cell interfaces by solving alocal Riemann problem in an exact or approximative way, the gas-kinetic schemes are based on aparticle distribution function that contains all properties of the flow. Another advantage of the gas-kinetic approach becomes obvious by considering a three-dimensional solver. The Riemann solveris always limited to an one-directional problem and one is forced to create a directional splittingscheme. However, besides the realization as directional splitting scheme, the gas-kinetic methodcan be directly extended to a real three-dimensional solver with the help of the gas distributionfunction.During the last decades, several gas-kinetic models have been developed. One of the first andsimplest methods that appeared, was the beam or EFM (Equilibrium Flux Method) scheme. Itsbasic idea is to assume the distribution functions in each cell to be Maxwellian. Reduced to aone-dimensional case for the sake of simplicity, the fluxes between two neighbouring cells can bedetermined at their boundary by the hypothesis of collision-less trajectories for the particles withpositive velocities coming from the left cell and those with negative velocities originating from the
1

right cell.The second well known kinetic scheme, the TTT (Totally Thermalized Transport) scheme, is dueto the opposite assumption. Instead of considering a collision free system, one supposes the ex-treme case of the total collision of all particles at the cell interfaces. Due to the collisions, anew Maxwellian distribution can be established, based on the mass, momentum and energy of thecollision products. This new distribution function is used afterwards in order to determine thenumerical fluxes across the boundary.The gas-kinetic scheme that is presented in the following, originates from the BGK (Bhatnagar-Gross-Krook) model that was developed in the 1950s. This scheme can be considered as a nonlinearcombination of the above mentioned methods as it includes a collisional gas-kinetic model that waspresented by Xu [13].In the past, kinetic schemes have not been implemented in CFD codes used for industrial appli-cations. The main reason for this is linked to the fact that they are quite expensive in terms ofcomputing time, as a lot of moments must be evaluated. Also, the error function has to be de-termined several times in the course of the algorithm. For the reason of this considerable amountof floating point operations, these schemes have long time been inaccessible for the practical use.With the development of more powerful computers they are though getting more and more intothe spotlight of industrial use and the main goal of this work is to understand the efficiency of suchschemes for industrial applications.In the following, some general information concerning the finite volume method and its extension tosecond order are presented. Then the relations between the gas-kinetic theory and the macroscopicNavier-Stokes equations are established. Afterwards the formulations for different BGK schemesare elaborated and presented. At first, the author extends the two-dimensional BGK method of Xu[13] to three dimensions and introduces a simplified version of it. Afterwards, another simplifiedscheme, developed by May [7] is presented. Moreover, the author exposes his developments for aBGK scheme of higher order than the previously discussed ones.Then the precise implementations of these schemes in the elsA code is discussed and several stan-dard numerical test cases are performed with the different solvers.
2

Chapter 2
The basic notion of the finite volumemethod
The presented gas-kinetic solver is designed for a finite volume method code. For this reason, somegeneral remarks concerning the basic notion of the finite volume method and its extension to secondorder are presented in this chapter.The finite volume method is used to approximate hyperbolic conservation laws like the Navier-Stokes equations. These kind of problems can be written in integral form as follows:
∫
V
dw
dtdV +
∫
V∇ · G(w)dV = 0. (2.1)
Here w = w(xi, t) describes the conservative variables and G(w) is the physical flux. Hence,the method is taking into account the conservation constraints of physics: conservation of mass,momentum and energy.Let’s have a closer look at Eq. (2.1). The first term gives the variation of the conservative variablesinside the examined control volume V . When the divergence theorem is applied, one can see thatthe second term is describing the fluxes over the volume borders. Moreover, Eq. (2.1) leads to thenotion of the mean cell values:
w =1
V
∫
VwdV dt. (2.2)
In order to further detail the principles of this method, the one-dimensional Euler equation isconsidered:
wt + ∇G(w) = 0. (2.3)
The basic idea of the finite volume method can be formulated as follows:The examined computation field is divided into several cells. In a one-dimensional case the coordi-nate of the cell centre of cell j is thus directly given by xj while the left and the right cell interfacehave the coordinates xj−1/2 and xj+1/2 respectively. Let the conservative variables wj+1/2(xj) bedenoted wjl and the corresponding variables at the right side of the interface wj+1/2(xj+1) arecalled wjr. An example of such a simple grid is presented by Fig. 2.1. Thus, at the interfaces wefind a local discontinuity. This discontinuity causes a flux between the neighbouring cells that isused to determine the conservative variables for the next time step.
3

.......................................................... ....................................
...................... ....................................
......................
xj+1/2xj−1/2
xj+1xj−1 xj
Figure 2.1: Grid with notation for the finite volume scheme
So the conservation law in one space dimension is approximated in the following way:
wn+1j = wn
j − ∆t
∆x(Fi+1/2 − Fi−1/2) (2.4)
Here F stands for the numerical approximation of the physical flux between two cells and n indicatesthe time index. The goal of the finite volume method is therefore to develop a flux model, so that thenumerical flux is very close to the physical one. It can be noticed that using the mean value wj asthe value of the conservative variables w at the cell centre is a second order accurate approximation.
2.1 The MUSCL scheme
As stated above, the usual finite volume method is working with integral mean values for theconservative variables. Furthermore, the values at the interfaces are considered to be identical tothe mean value at the cell centre. Therefore the calculations that are following this proceeding areonly of order one.To extend the finite volume method to the order two, one can use the so-called MUSCL scheme,where MUSCL stands for Monotonic Upstream Scheme for Conservation Laws.The basic idea of MUSCL is to better approximate the states at the cell interfaces by a piecewiselinear approximation within the cells, considering the neighbouring cells.The scheme can be divided into three parts:
• Slope calculation
• Slope limitation
• Reconstruction
For the sake of simplicity, only the basic idea of the scheme is presented in the following and onlythe simplest version of slope limitation is taken into account.
2.1.1 Slope calculation
In a first step a cell i and its neighbouring cells i − 1 and i + 1 are considered (cf. Fig. 2.2). Ingeneral, one is interested in approximating the development of the conservative variables inside the
4

cells. A piecewise linear reconstruction needs to consider several cells.For this reason, the spatial gradients to the left and right, s1 and s2 respectively, are determined:
s1 =wi − wi−1
∆x, (2.5)
s2 =wi+1 − wi
∆x, (2.6)
(2.7)
where ∆x describes the distance between the cell centres.A first look at Fig. 2.2 might create the idea to use the left slope s1 to reconstruct the value at theleft interface xi−1/2 and the right slope s2 for the corresponding value at the right interface xi+1/2.In fact, this proceeding is not acceptable, as the integral conservation of the mean cell value has tobe guaranteed within the cell.Consequently, one has to decide which of the two slopes has to be taken for the reconstruction ofboth interface values.
s1
i−1 i i+1
s2
Figure 2.2: Slope calculation considering the neighbouring cells.
2.1.2 Slope limitation
The decision for one of the above calculated slopes is denoted as slope limitation. A closer look toFig. 2.3 and Fig. 2.4 helps to explain the basic idea of this process.
Let us first consider Fig. 2.3 in order to explain the process of slope limitation by means of thesimple slope limiter minmod. This figure illustrates the calculated spatial slopes as they are alreadyknown from Fig. 2.2. Additionally the determined slopes are extended to the opposite cell interfacerespectively.In a first approach, the slope s2 is used for the reconstruction. Yet, this leads to the creation of anew local maximum, as the reconstructed value at the left interface xi−1/2 of the cell i would begreater than the mean value of the neighbouring cell i − 1. Therefore, such a reconstruction is notpossible, as it would violate the real distributions in the field of computation.By taking the slope s1, it is obvious that the left interface value is reproduced in the correct wayaccording to a linear development. As for the right cell interface xi+1/2, the computed value is
5

s1
i−1 i i+1
s2
Figure 2.3: Gradients of the samealgebraic sign.
i−1 i i+1
s1
s2
Figure 2.4: Gradients of opposite al-gebraic sign.
slightly above the value that would correspond to the one reconstructed by the physical slope s2.However, this solution is still in accordance with the distributions in the field of computation.The above reasonings lead directly to the conclusion, that in the case of two slopes with identicalalgebraic sign the best choice is the one with the smallest absolute value.Fig. 2.4 depicts the case of two slopes s1 and s2 that are of different algebraic sign, so that cell irepresents a local extremum. Under such a circumstance, a reconstruction cannot be done. TheMUSCL scheme is not applied and the finite volume method is decreased to order one. The slopelimitation in a CFD code is done by the so-called limiters. Besides this rather simple proceeding(based on the principle of maximum), there exist a lot of other methods to compute the necessaryslopes.
2.1.3 Reconstruction
After having determined and limited the slope, in a third and last step of the MUSCL scheme, thefinal reconstruction with the determination of the cell interface values is done.This is based on a spatial Taylor expansion:
wilr = wi ±1
2· ∆x · si + O(∆x2). (2.8)
The spatial reconstruction can be done without any difficulties with the help of the obtained slopessi
wilr = wi ±1
2· ∆x · si.
According to Fig. 2.5, the integral mean cell value is conserved, as the two triangles are of the samearea and the desired conservative variables wilr at the cell interfaces are therefore determined.
6

irw
w il
i−1 i i+1
Figure 2.5: Spatial reconstruction of the cell interface values considering the integral conservationconstraint.
7

8

Chapter 3
Relation between hydrodynamics andgas-kinetic theory
A gas flow can be described in two ways: the first one is based on macroscopic quantities, suchas mass, momentum and energy densities combined with the Euler or Navier-Stokes equations.The second way of description is derived from microscopic considerations, like they are given bythe gas theory. The second consideration offers the possibility to obtain viscous and inviscidterms simultaneously. Furthermore, all flow variables are moments of a single particle distributionf(xi, ui, t). This fundamental quantity, the function f(xi, ui, t), which contains both equilibriumand non-equilibrium properties of the gas flow, is built with the ratio of the velocity distributionF (xi, ui, t) and the number of particles N
f(xi, ui, t) =F (xi, ui, t)
N. (3.1)
The temporal evolution of the gas distribution function is given by the Boltzmann equation. Pro-vided the hypothesis of the domination of two body collisions, a simplified Boltzmann equation canbe used:
ft + uifxi + aifui = Q(f, f). (3.2)
In this equation, f represents the one-particle probability distribution, xi, ui, ai are particle lo-cation, velocity and force terms acting on the particle and Q(f, f) describes the integral collisionoperator. In the following we will use such a simplified equation in order to develop an algorithmthat is capable of calculating at once both, the convective and the diffusive fluxes.The used model of the Boltzmann equation is the model of Bhatnagar-Gross-Krook (BGK). Itdescribes the relaxation of the gas distribution f to an equilibrium state g during a characteristictime τ which is determined by the collision of the particles. Hence τ is called collision time.The BGK model approaches the collision operator by the expression:
Q(f, f) =f − g
τ. (3.3)
Consequently, this assumption and the Chapman-Enskog expansion of the order one with respectto τ result in a limitation of the BGK model to unit Prandtl number Pr = 1.
9

In the context of the particle collisions, the physical constraints of mass, momentum and energyconservation must be satisfied. Hence, the following condition for the collision operator is found:
∫
ΨαQ(f, f)dΘ = 0, (3.4)
where Ψα are the components of the vector of moments:
~Ψ = (Ψ1,Ψ2,Ψ3,Ψ4,Ψ5)T =
(
1, u, v, w,1
2(u2 + v2 + w2 + ξ2)
)T
, (3.5)
and dΘ = dudvdwdξ with dξ = dξ1dξ2 · · · dξK . Then u, v, w are the individual particle velocities inx, y, z-direction and ξ is the internal velocity.The variable K describes the total number of degrees of freedom and is given by
K =5 − 3γ
γ − 1. (3.6)
and γ is defined as the specific heat ratio.Starting with Eq. (3.2), the Euler and Navier-Stokes equations can be derived throughout the so-called Chapman-Enskog expansion. For the inviscid Euler equations, the integral collision operatoris set to zero Q(f, f) = 0. The Navier-Stokes equations correspond to the Chapman-Enskogexpansion of order one with respect to τ . In the context of their derivation, the collision time τ isdirectly obtained as the relation of dynamic viscosity µ and static pressure p
τ =µ
p. (3.7)
A basic overview of the Chapman-Enskog expansion is given in appendix A. A more detailed pre-sentation is e.g. given in the article of Ohwada [9] or in the PhD thesis of May [6].Let us accomplish the formulation of the dependency between the Boltzmann equation and hy-drodynamics. Due to the fact that all the particles must be located somewhere in the phasespace, one can establish the relation between distribution function f and density ρ, momentum(n = ρU,m = ρV, o = ρW ) and energy densities E as follows:
ρnmoE
=
∫
~ΨfdΘ, (3.8)
where U , V and W are the macroscopic velocities in the x-, y- and z-directions.An analogous proceeding leads to the numerical flux F :
Fρ
Fm
Fn
Fo
FE
=
∫
u~ΨfdΘ. (3.9)
The goal of each gas-kinetic scheme is therefore the modeling of the gas distribution function f thatallows the determination of the macroscopic flow properties. In the following chapters, differentpossibilities for the modeling of the distribution f are presented.
10

Chapter 4
The BGK scheme of Xu
Before presenting the implemented BGK scheme of Xu, two basic schemes and their combinationare shown. The following brief excursion is based on the PhD thesis of Xu [12]. The gas-kineticschemes EFM and TTT are presented, including the corresponding way of flux calculation. For thesake of simplicity the two methods are treated for the one-dimensional case, hence two neighbouringcells are considered. In each cell, the assumption of a Maxwellian gas distribution is made.
4.1 The Equilibrium Flux Method (EFM)
The equilibrium flux method (EFM) is based on the assumption that there are no collisions betweenthe particles with positive velocities at the boundary coming from the left cell and those withnegative velocities originating from the right cell (cf. Fig. 4.1(a)). This hypothesis for the gasdistribution function f can thus be written as follows:
f =
gr, u < 0,
gl, u > 0.(4.1)
Here the variables gl,r describe the equilibrium state for the left and the right cell respectively. Itis given by a Maxwellian distribution.Therefore, the numerical flux is obtained directly by calculating the following time-averaged mo-ments of the gas distribution function f
Fρ
Fm
Fn
Fo
FE
EFM
=1
∆t
∫ ∆t
0
(∫
u>0u~ΨgldΘ +
∫
u<0u~ΨgrdΘ
)
dt. (4.2)
11

4.2 The Totally Thermalized Transport Model (TTT)
The TTT scheme includes particle collisions. In the derivation of this method, the extreme case ofthe total collision of all the particles crossing the border is assumed. All particles that are movingto the border (particles with u > 0 for the left and u < 0 for the right cell) collide there (cf.Fig. 4.1(b)). This leads to the construction of a new Maxwellian distribution function g0 at thislocation derived from the mass, momentum and energy of the collision products that are dependentfrom the distributions gl,r in the two cells
∫
g0~ΨdΘ =
∫
u>0
∫
gl~ΨdΘ +
∫
u<0
∫
gr~ΨdΘ. (4.3)
It is this Maxwellian g0 that afterwards delivers the time-averaged numerical fluxes at the boundaryby the computation of the moments:
Fρ
Fm
Fn
Fo
FE
TTT
=1
∆t
∫ ∆t
0
∫
u~Ψg0dΘdt. (4.4)
(a) EFM (b) TTT
Figure 4.1: The different assumptions for the particle movements at the cell borders.
4.3 Partial conclusion of EFM and TTT
Non of the two schemes offers a realistic physical approach: The particles are neither likely topenetrate into the neighbouring cells without any collisions, nor can an immediate total collisionof the particles be considered as probable.For this reason, one has to introduce a so-called relaxation process for the particle collisions. Thisreasoning includes the physical fact, that sooner or later the different particles are interacting andcreating a new state. In order to combine the free transport of the EFM scheme and the collisionaleffects of the TTT model, an early approach has been the creation of the so-called PTT (PartialThermalized Transport) scheme. This scheme is nothing less than a linear combination of the TTT
12

and the EFM scheme. Then the numerical fluxes are consequently written as:
Fρ
Fm
Fn
Fo
FE
PTT
= η
Fρ
Fm
Fn
Fo
FE
EFM
+ (1 − η)
Fρ
Fm
Fn
Fo
FE
TTT
, (4.5)
where η can directly be interpreted as the percentage of the EFM scheme.Yet, the BGK scheme is not a simple linear combination of the two above schemes, but includesthe relaxation process with the help of a collision model. This creates a non-linear coupling of themodels.
4.4 The architecture of the Xu model
In the following, the extension of the two-dimensional directional splitting gas-kinetic BGK model,developed by Xu in [13], to a three-dimensional directional splitting method is presented.For this reason, all developments are made in the x-direction whereas this direction is supposed tobe normal to the cell interface in order to take into account structured, non-Cartesian meshes. TheBGK model in the x-direction can therefore be written as
ft + ufx =g − f
τ, (4.6)
where f is the gas distribution function and g is the equilibrium state approached by the functionf . The collision time τ depends directly on the viscosity and the heat flux. The use of a relaxationmodel allows to approximate the integral collision operator Q(f, f) by the term g−f
τ .The equilibrium state is given by a Maxwellian distribution
g = ρ
(λ
π
)K+32
e−λ((u−U)2+(v−V )2+(w−W )2+ξ2), (4.7)
where ρ is the density, U , V and W are the macroscopic velocities in the x-, y- and z-directionsrespectively and λ = m/2kT (m molecular mass, k Boltzmann constant and T temperature). Thegeneral solution f of the BGK scheme (Eq. (4.6)) at a cell interface xj+1/2 and time t is
f(xj+1/2, t, u, v, w, ξ) =1
τ
∫ t
0g(x′, t′, u, v, w, ξ)e−(t−t′)/τ dt′ + e−t/τ f0(xj+1/2 − ut), (4.8)
where x′ = xj+1/2−u(t−t′) represents the particle trajectory and f0 is the initial gas distribution atthe beginning of each time step (t = 0). This equation is valid under the assumption of τ = const.in the interval [0, t] what is the case for the Xu model. In order to simplify the notation, xj+1/2 = 0will be imposed in the following.As there exist two unknowns f0 and g, additional assumptions are necessary in order to be able todetermine the solution of f .The initial gas distribution f0 is supposed to have the form
f0 =
gl[1 + alx − τ(alu + Al)
], x ≤ 0,
gr [1 + arx − τ(aru + Ar)] , x > 0.(4.9)
13

One can easily see, that this distribution is discontinuous at the cell border x = 0, as the Taylorexpansion is based on the Maxwellian of the left and right side respectively (cf. Fig. 4.2).The slopes al and ar are derived from the spatial derivative of the Maxwellian distribution atthe left and right side of the cell interface. They correspond with the slopes of the conservativevariables.The term τ(au + A) is obtained from the Chapman-Enskog expansion of the BGK scheme’s gasdistribution and it takes into account the deviation of the distribution function from a Maxwelliandistribution. This is equivalent to the consideration of non-equilibrium states for f0. By consideringthis non-equilibrium state in the initial gas distribution, one gets a more realistic description of theflow within a single cell. Since these terms do not contribute to the conservative variables, theyhave to satisfy the conservation constraints:
∫
(alu + Al)~ΨgldΘ = 0, (4.10)∫
(aru + Ar)~ΨgrdΘ = 0. (4.11)
The equilibrium state around (x = 0, t = 0) is assumed to be dependent on the left and right sideof the cell interface
g =
g0
[1 + alx + At
], x ≤ 0,
g0
[1 + arx + At
], x > 0,
(4.12)
where g0 is the local Maxwellian at x = 0. Although the function g is continuous at x = 0, it isprovided with two different slopes for x < 0 and x > 0. The coefficients al, Al, ar, Ar, al, ar and Aare directly related to temporal and spatial derivatives of a Maxwellian. They are obtained by aTaylor expansion and have the form
al = al1 + al
2u + al3v + al
4w + al5
12(u2 + v2 + w2 + ξ2) = al
αΨα,
Al = Al1 + Al
2u + Al3v + Al
4w + Al5
12(u2 + v2 + w2 + ξ2) = Al
αΨα,
· · ·
A = A1 + A2u + A3v + A4w + A512(u2 + v2 + w2 + ξ2) = AαΨα,
where α = 1, 2, 3, 4, 5 and all coefficients al1, a
l2, · · · , Al
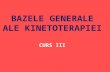
5 are local constants.A closer look to the above coefficients reveals their definition and their influence. Expanding theMaxwellian gl,r in space, the coefficients al,r are linked to the collision free part of the BGK model.In combination with the coefficients Al,r that are originating from the Chapman-Enskog expansion,they are responsible for the linear expansion of the initial gas distribution function f0 within eachcell. Their importance is to model the convective part of the fluxes.The coefficients a appearing in the equilibrium state g are also space-dependent. They are usedto create the linear equilibrium state g by expanding the reconstructed Maxwellian g0 at thecell interface. As they contain the effects of the particle collisions, they are responsible for themodeling of the viscous effects and therefore the diffusive parts of the numerical fluxes. The termsA introduce a time-dependency. In addition to the already discussed spatial extension of theequilibrium Maxwellian g0, they guarantee the temporal evolution of the equilibrium state g.Figure 4.2 illustrates the initial state f0 (Eq. (4.9)) and the equilibrium state g (Eq. (4.12)). The
14

final solution for the gas distribution function f , that is used for the computation of the macroscopicvariables, is a nonlinear combination of f0 and g. This proceeding illustrates the combination ofthe two already presented gas-kinetic schemes EFM (Equilibrium Flux Method) and TTT (TotallyThermalized Transport).The following sections are detailing the several components of the Xu scheme. First, the twodistribution functions f0 and g are determined in order to compute the numerical flux. Then thePrandtl number correction is treated.
Figure 4.2: Spatial distribution of the initial state f0 and the equilibrium state g at t = 0.
4.4.1 The initial distribution function f0
Thanks to the reconstruction stage (cf. chapter 2) we dispose of the distributions ρj(x), mj(x), nj(x), oj(x)and Ej(x) inside each cell for xj−1/2 ≤ x ≤ xj+1/2. At the cell interface xj+1/2, the left and rightmacroscopic states are therefore known and given by
~wj(xj+1/2) =
ρj(xj+1/2)
mj(xj+1/2)
nj(xj+1/2)
oj(xj+1/2)
Ej(xj+1/2)
, ~wj+1(xj+1/2) =
ρj+1(xj+1/2)
mj+1(xj+1/2)
nj+1(xj+1/2)
oj+1(xj+1/2)
Ej+1(xj+1/2)
.
The Maxwellian distributions gl and gr are defined as follows:
gl = ρl(
λl
π
)K+32
e−λl((u−U l)2+(v−V l)2+(w−W l)2+ξ2),
gr = ρr(
λr
π
)K+32 e−λr((u−Ur)2+(v−V r)2+(w−W r)2+ξ2).
15

Here, the macroscopic flow variables U l,r, V l,r, W l,r, ρl,r and λl,r are unknown and have to bedetermined. With the help of the above Maxwellian distributions g l,r and the relation between thegas distribution function f and the macroscopic variables (cf. Eq. (3.8)), the following results areobtained:
∫
gl~ΨdΘ = ~wj(xj+1/2), (4.13)
∫
glal~ΨdΘ =~wj(xj+1/2) − ~wj(xj)
∆x−, (4.14)
∫
gr~ΨdΘ = ~wj+1(xj+1/2), (4.15)
∫
grar~ΨdΘ =~wj+1(xj+1/2) − ~wj+1(xj+1)
∆x+, (4.16)
where ∆x stands for the normal distance between cell centre and interface. The distances arecomputed as ∆x− = xj+1/2 − xj and ∆x+ = xj+1 − xj+1/2.
As already mentioned above, the slopes of the conservative variables and the slopes a l and ar ofthe initial gas distribution f0 are coincident, what allows to establish Eq. (4.14) and Eq. (4.16).This can easily be understood by considering the Taylor expansion of the Maxwellian g l,r. Buildingthe spatial derivative of Eq. (4.9) and introducing the vector of moments, we find the relationsEq. (4.14) and Eq. (4.16).The spatial derivative in the expression ∂
∂x
∫f0
~ΨdΘ is approximated by decentred differences.In the end, Eq. (4.13) and Eq. (4.15) lead to the results
ρl
U l
V l
W l
λl
=
ρj(xj+1/2)
mj(xj+1/2)/ρj(xj+1/2)
nj(xj+1/2)/ρj(xj+1/2)
oj(xj+1/2)/ρj(xj+1/2)
λl(xj+1/2)
= ~wj(xj+1/2),
ρr
U r
V r
W r
λr
=
ρj+1(xj+1/2)
mj+1(xj+1/2)/ρj(xj+1/2)
nj+1(xj+1/2)/ρj(xj+1/2)
oj+1(xj+1/2)/ρj(xj+1/2)
λr(xj+1/2)
= ~wj+1(xj+1/2),
and the two variables λl and λr are determined in the following manner
λl(xj+1/2) =(K + 3)ρj(xj+1/2)
4(Ej(xj+1/2) − 12 (m2
j(xj+1/2) + n2j(xj+1/2) + o2
j (xj+1/2))/ρj(xj+1/2)),
λr(xj+1/2) =(K + 3)ρj+1(xj+1/2)
4(Ej+1(xj+1/2) − 12 (m2
j+1(xj+1/2) + n2j+1(xj+1/2) + o2
j+1(xj+1/2))/ρj+1(xj+1/2)).
16

In order to simplify the notation, from now on we will use the expressions
< · · · > =
∫∞
−∞
(· · · )g · dudvdwdξ, (4.17)
< · · · ><0 =
∫ 0
−∞
(· · · )g · dudvdwdξ, (4.18)
< · · · >>0 =
∫∞
0(· · · )g · dudvdwdξ, (4.19)
proposed by Xu. Having finished the computation of g l and gr, we are now able to determine theslopes ar and al with the help of Eq. (4.14) and Eq. (4.16), what results in
~wj(xj+1/2) − ~wj(xj)
ρl∆x−= Ml
αβ
al1
al2
al3
al4
al5
= Mlαβal
β , (4.20)
~wj+1(xj+1/2) − ~wj+1(xj+1)
ρr∆x+= Mr
αβ
ar1
ar2
ar3
ar4
ar5
= Mrαβar
β , (4.21)
with
Mlαβ =
1
ρl
∫
glΨαΨβdΘ,
Mrαβ =
1
ρr
∫
grΨαΨβdΘ,
where α, β are numbers of lines and columns.Matrix Ml and matrix Mr are of the same structure and differ only in the consideration of thevelocities and the value of λ for the corresponding side. Therefore we will treat this problem onthe basis of a unique matrix M without indices l, r. This matrix M has the following form
M =
1 U V W B1
U U2 + 12λ UV UW B2
V UV V 2 + 12λ V W B3
W UW V W W 2 + 12λ B4
B1 B2 B3 B4 B5
; (4.22)
B1 =1
2(U2 + V 2 + W 2 +
K + 3
2λ),
B2 =1
2(< u3 > + < u > L),
B3 =1
2(< v3 > + < v > (< u2 > + < w2 > + < ξ2 >)),
B4 =1
2(< w3 > + < w > (< u2 > + < v2 > + < ξ2 >)),
17

B5 =1
4(< u4 > + < v4 > + < w4 > + < ξ4 > +2(< u2 > L+
< v2 > (< w2 > + < ξ2 >)+ < w2 >< ξ2 >)),
with
L =< v2 > + < w2 > + < ξ2 > .
During the evaluation of the BGK scheme the solution of the following equation is needed manytimes
M ·
a1
a2
a3
a4
a5
=
c1
c2
c3
c4
c5
. (4.23)
For this reason we introduce the below algorithm that is presented by Xu in [11]. With thecoefficients
R5 = 2B5 − (U2 + V 2 + W 2 +K + 3
2λ)B1,
R4 = B4 − WB1,
R3 = B3 − V B1,
R2 = B2 − UB1,
we can immediately obtain the solution of Eq. (4.23) as follows
a5 =4λ2
K + 3(R5 − 2UR2 − 2V R3 − 2WR4),
a4 = 2λR4 − Wa5,
a3 = 2λR3 − V a5,
a2 = 2λR2 − Ua5,
a1 = B1 − Ua2 − V a3 − Wa4 −1
2a5(U
2 + V 2 + W 2 +K + 3
2λ).
Returning to the determination of the the slopes ar and al, one obtains the ci for Eq. (4.20) andEq. (4.21) as:
cl1 =
ρj(xj+1/2)−ρj(xj)
ρl∆x−, (4.24)
cl2 =
mj(xj+1/2)−mj(xj)
ρl∆x−, (4.25)
cl3 =
nj(xj+1/2)−nj(xj)
ρl∆x−, (4.26)
cl4 =
oj(xj+1/2)−oj(xj)
ρl∆x−, (4.27)
cl5 =
Ej(xj+1/2)−Ej(xj)
ρl∆x−, (4.28)
18

and
cr1 =
ρj+1(xj+1)−ρj+1(xj+1/2)
ρr∆x+ , (4.29)
cr2 =
mj+1(xj+1)−mj+1(xj+1/2)
ρr∆x+ , (4.30)
cr3 =
nj+1(xj+1)−nj+1(xj+1/2)
ρr∆x+ , (4.31)
cr4 =
oj+1(xj+1)−oj+1(xj+1/2)
ρr∆x+ , (4.32)
cr5 =
Ej+1(xj+1)−Ej+1(xj+1/2)
ρr∆x+ . (4.33)
Since Matrix Ml, matrix Mr and the right hand sides of the above equations are known, we cancompute the coefficients a with the help of the above method for the equation system.As the coefficients Al,r are still unknown we use Eq. (4.10) and Eq. (4.11) concerning the conser-vation constraints to determine the coefficients A
MlαβAl
β = − 1
ρl
∫
glaluΨαdΘ, (4.34)
MrαβAr
β = − 1
ρr
∫
graruΨαdΘ. (4.35)
Again the scheme of Eq. (4.23) will be used in combination with the following right hand side cα
cα = −1
ρ
∫
gauΨαdΘ.
To simplify the notation, the indices l, r are omitted in the subsequent equations for the A l,r
c1 = −[ < u > (a1 + a3 < v > +a4 < w > +a5
2L)+
< u2 > a2+
< u3 >a5
2],
c2 = −[ < u2 > (a1 + a3 < v > +a4 < w > +a5
2L)+
< u3 > a2+
< u4 >a5
2],
19

c3 = −[ < u > (< v > (a1 + a4 < w > +a5
2(< w2 > + < ξ2 >))+ < v2 > a3+ < v3 >
a5
2)+
< u2 > a2 < v >
< u3 >a5
2< v >],
c4 = −[ < u > (< w > (a1 + a3 < v > +a5
2(< v2 > + < ξ2 >))+ < w2 > a4 +
a5
2< w3 >)+
< u2 > a2 < w > +
< u3 >a5
2< w >],
c5 = −1
2[a5
2< u5 > +a2 < u4 > +a1 < u3 > +a3(< u3 >< v > + < u >< v3 >)+
a4(< u3 >< w > + < u >< w3 >) + L(a1 < u > +a2 < u2 > +a5 < u3 >)+
(< w2 > + < ξ2 >)(a3 < u >< v > +a5 < u >< v2 >)+
a4 < u >< w > (< v2 > + < ξ2 >) +a5
2< u > (< v4 > + < w4 > + < ξ4 >)+
a5 < u >< w2 >< ξ2 >].
With the computation of the coefficients Al,r the function f0 is definitely determined so that weturn our interest to the equilibrium state function g (Eq. 4.12).
4.4.2 The equilibrium distribution g
At the cell interface, a new equilibrium state g0 is assumed. This assumption therefore includesthe determination of new conservative variables ρ0, m0, n0, o0 and E0 that are determined at thecell interfaces at the time t = 0. As they are based on the particle collisions at the cell border, theequilibrium state vector ~w0 can be defined as:
~w0 =
∫
g0~ΨdΘ =
∫
u>0
∫
gl~ΨdΘ +
∫
u<0
∫
gr~ΨdΘ, (4.36)
with
~w0 =
ρ0
m0
n0
o0
E0
, (4.37)
and Eq. (4.36) leads to
ρ0 = ρl < 1l >>0 +ρr < 1r ><0, (4.38)
m0 = ρl < ul >>0 +ρr < ur ><0, (4.39)
n0 = ρl < vl >< 1l >>0 +ρr < vr >< 1r ><0, (4.40)
o0 = ρl < wl >< 1l >>0 +ρr < wr >< 1r ><0, (4.41)
E0 =1
2[ρl(< u2
l >>0 + < 1l >>0 (< v2l > + < w2
l > + < ξ2 >))+
ρr(< u2r ><0 + < 1r ><0 (< v2
r > + < w2r > + < ξ2 >))].
(4.42)
20

As for the coefficients al and ar, their computation happens in a similar way to the coefficients al
and ar and the matrix M0 is determined by Eq. (4.22) with the help of the reconstructed valuesU0, V0, W0 and λ0
~w0 − ~wj(xj)
ρ0∆x−= M0
αβ
al1
al2
al3
al4
al5
= M0αβ al
β, (4.43)
~wj+1(xj+1) − ~w0
ρ0∆x+= M0
αβ
ar1
ar2
ar3
ar4
ar5
= M0αβ ar
β. (4.44)
The right hand side ci for the equation system (cf. Eq. (4.23)) is given by:
cl1 =
ρ0−ρj(xj)ρ0∆x−
, (4.45)
cl2 =
m0−mj(xj)ρ0∆x−
, (4.46)
cl3 =
n0−nj(xj)ρ0∆x−
, (4.47)
cl4 =
o0−oj(xj)ρ0∆x−
, (4.48)
cl5 =
E0−Ej(xj)ρ0∆x−
, (4.49)
and
cr1 =
ρj+1(xj+1)−ρ0
ρ0∆x+ , (4.50)
cr2 =
mj+1(xj+1)−m0
ρ0∆x+ , (4.51)
cr3 =
nj+1(xj+1)−n0
ρ0∆x+ , (4.52)
cr4 =
oj+1(xj+1)−o0
ρ0∆x+ , (4.53)
cr5 =
Ej+1(xj+1)−E0
ρ0∆x+ . (4.54)
Up to this point, all the spatial-dependent parameters in the initial gas distribution function f0 andthe equilibrium state function g have been determined at the beginning of each time step t = 0.Considering all these results, the gas distribution function f (Eq. (4.8)) can be written as
f =
R2g0 + R3arug0 + R4Ag0 + R1(1 − u(t + τ)ar)gr − R1τArgr; u < 0,
R2g0 + R3alug0 + R4Ag0 + R1(1 − u(t + τ)al)gl − R1τAlgl; u > 0,
(4.55)
where
R1 = e−t/τ ,
R2 = 1 − R1,
R3 = τ(−1 + R1) + tR1,
R4 = τ(t
τ− 1 + R1).
21

As already stated in Eq. (3.7), the collision time τ for the Navier-Stokes equations
τ =µ
p,
is computed from the ratio of viscosity µ and pressure p. According to the hypothesis of Xu, theviscosity µ is determined by Sutherland’s law with the help of the reconstructed state variables p0
and T0
µ(~w0) = µ∞
(T0
T∞
)3/2 T∞ + S
T0 + S. (4.56)
In the case of a turbulent flow, the turbulent viscosity µt is added directly:
µ(~w0) = µ∞
(T0
T∞
)3/2 T∞ + S
T0 + S+ µt. (4.57)
Additionally an artificial numerical viscosity is added for the computation of the collision time τ ,so that we finally get the following term:
τ =µ(~w0)
p(~w0)+
|ρl/λl − ρr/λr||ρl/λl + ρr/λr|
∆t, (4.58)
where ∆t is directly dependent on the CFL. The additional second term is used to improve theshock capturing of the scheme.
Now the only unknown variables that are left in the expression for f are the coefficients A forthe time-dependence. With the help of the conservation constraint for the collision term
∫ ∆t
0
∫
(g − f)~ΨdtdΘ = 0, (4.59)
A can be determined as follows:
M0αβAβ =
1ρ0
∫[γ1g0 + γ2uarg0 + γ3g
r + γ4uargr + γ5(aru + Ar)gr] ΨαdΘ; u < 0,
1ρ0
∫ [γ1g0 + γ2ualg0 + γ3g
l + γ4ualgl + γ5(alu + Al)gl
]ΨαdΘ; u > 0,
(4.60)
where
γ0 = ∆t − τ(1 − e−∆t/τ ),
γ1 = −1 − e−∆t/τ
γ0,
γ2 =−∆t + 2τ(1 − e−∆t/τ ) − ∆te−∆t/τ
γ0,
γ3 =1 − e−∆t/τ
γ0,
γ4 =∆te−∆t/τ − τ(1 − e−∆t/τ )
γ0,
γ5 =τ(1 − e−∆t/τ )
γ0.
22

Again we will use the above introduced scheme (cf. Eq. 4.23)) to compute the coefficients A. Theexpressions of Eq. (4.60) have been evaluated by the author and can be found in appendix C.Eventually, all the expressions for the equilibrium state function g and the initial gas distributionfunction f0 can be substituted into the gas distribution function f and we obtain
f =
R2g0 + R3arug0 + R4Ag0 + R1(1 − u(t + τ)ar)gr − R1τArgr; u < 0,
R2g0 + R3alug0 + R4Ag0 + R1(1 − u(t + τ)al)gl − R1τAlgl; u > 0.
4.4.3 The flux evaluation
As it has been already mentioned in chapter 2, the basic idea of the finite volume method is themodeling of the fluxes across the cell interfaces. For this reason, the main interest of a numericalsolver is the flux computation. Thus, the time-dependent numerical flux F across the cell interfaceis given as
Fρ
Fm
Fn
Fo
FE
=
∫
u
1uvw
12(u2 + v2 + w2 + ξ2)
f(xj+1/2, t, u, v, w, ξ)dΘ. (4.61)
The above equations have to be integrated to the whole time step ∆t in order to get the time-averaged fluxes over the cell interfaces
Fρ
Fm
Fn
Fo
FE
=1
∆t
∫ ∆t
0
∫
u
1uvw
12(u2 + v2 + w2 + ξ2)
f(xj+1/2, t, u, v, w, ξ)dΘdt. (4.62)
As the time-dependent components of the flux can be found in the components R1, R2, R3, R4 and(t + τ) (cf. Eq. (6.31)) we only have to evaluate the corresponding integrals. They do not containany moments, so that the integration with respect to the time and the evaluation of the momentscan be done separately for the flux computation.The detailed equations have been computed by the author and can be found in appendix D.
4.4.4 The Prandtl number correction
As the BGK scheme corresponds to unit Prandtl number Pr = 1, a Prandtl number fix has tobe established in order to be able to change the value of Pr to any realistic value. As the BGKscheme is only capable of computing either the correct viscosity or the right heat conduction, thepreviously computed energy flux has to be modified
F newE = FE +
(1
Pr− 1
)
q. (4.63)
23

Here q is the time-dependent heat flux which is used to include the variable Prandtl number in theBGK model
q =1
2
1
∆t
∫ ∆t
0
∫
(u − U)((u − U)2 + (v − V )2 + (w − W )2 + ξ2)fdΘdt. (4.64)
The velocities U , V , W are averaged velocities and one obtains them with the help of the equations
U =
∫ ∆t0
∫ufdΘdt
∫ ∆t0
∫fdΘdt
, (4.65)
V =
∫ ∆t0
∫vfdΘdt
∫ ∆t0
∫fdΘdt
, (4.66)
W =
∫ ∆t0
∫wfdΘdt
∫ ∆t0
∫fdΘdt
. (4.67)
Again, the time integration can be reduced to the variables R1, R2, R3, R4, so that this part isalready known and calculated for the flux evaluation. Furthermore the enumerator of the firstvelocity U represents the flux component Fρ. The other integrals for the enumerators and all thedenominators are also part of the heat flux q computation.By expansion of Eq. (4.64) we find the following equation which contains all the flux components,so that the evaluation can be performed faster
q = FE− 3
2UFm−V Fn−WFo+Fρ(
1
2Q+U2)− 1
2U
1
∆t
∫ ∆t
0
∫
(v2+w2+ξ2+Q−2(vV +wW ))fdΘdt.
(4.68)The remaining integral is split in several parts that are solved separately. With the known definitionfor f (Eq. (6.31)) and the constant Q
Q = U2 + V 2 + W 2,
the solutions of these integrals can be obtained. The corresponding equations have been calculatedby the author and can be found in appendix E.So far, the possibility of a variable Prandtl number for the BGK scheme is given by this correction.Yet, in turbulent flow, one has to take into account the effect of the turbulent Prandtl number, sothat an additional correction of the temperature has to be established.The present implementation of the solver, in a first approach, is neglecting these effects by supposingthe turbulent Prandtl number to be equal to the laminar one. However, the development of sucha correction is of vital interest for the future developments of the gas-kinetic solver.
4.5 The collision time τ
The determination of the collision time τ has to be modified in order to be able to treat inviscidflows. The following paragraphs show the introduced modifications.
24

4.5.1 Determination of the particle collision time τ
Being proposed as
τ =µ(~w0)
p(~w0)+
|ρl/λl − ρr/λr||ρl/λl + ρr/λr|
∆t,
by Xu in [13], the collision time τ reduces automatically to the expression
τ =|ρl/λl − ρr/λr||ρl/λl + ρr/λr|
∆t, (4.69)
for the inviscid Euler computations. Hence, it is only dependent on the artificial viscosity term thatis introduced for shock capturing. Yet, while performing first runs for the RAE2822 test case it isdiscovered that further artificial viscosity is needed. The obtained results show instable oscillationsof the shock on the airfoil’s upper side. Thus the viscosity-dependent collision time term τ has tobe modified and it is extended by an additional term proposed in [8]
τ = β1∆t + β2|ρl/λl − ρr/λr||ρl/λl + ρr/λr|
∆t. (4.70)
As we can see, the collision time depends now on a constant value β1∆t and on the variable pressuregradient, that has an important contribution in the shock regions.The following test cases in chapter 8 will demonstrate the influence of the parameter τ for inviscidflows.
4.5.2 Determination of the particle collision time τ by use of the mean freepath
The preceding model allows the user the adaption of the artificial viscosity in the case of inviscidcomputations. As the parameters β1 and β2 have a considerable influence on the result’s quality,they cannot be chosen in an arbitrary way. To guarantee an appropriate solution, a lot of prelimi-nary test runs have to be performed in order to tune βi.This task is rather easy for the tuning of β2, because this parameter, directly linked to great pres-sure differences like they occur in proximate neighbourhood of shocks, causes evident oscillationsin shock regions if it is chosen to small. However, the value of β1 has a direct influence on theviscosity in the whole field of computation, so that the solution is damped everywhere without anyparticular indication.It is our goal to replace the expression β1∆t by a term that is derived directly from physical con-siderations based on the mean free path of the molecules. This means that the collision time τ , forthe case of the absence of shocks, is no longer directly dependent on the time step ∆t but on theproperties of the local macroscopic flow variables.In an inviscid flow field without any shocks, we suppose the collision time τ being directly dependenton the ratio of the mean free path l and the mean particle velocity u
τ =l
u. (4.71)
Here the mean particle velocity is considered to be the mathematical average of the speed distri-bution:
u =
√
8
πRT (4.72)
25

Furthermore the mean free path is known as:
l =kT√2πσ2p
, (4.73)
where k is the Boltzmann constant, T the temperature in Kelvin, σ the particle diameter and pthe pressure in Pascal.Starting from this hypothesis the state variables T and p are taken for each cell and iteration fromthe reconstructed state ~w0 at the cell interfaces.So the final expression for the collision time can be written as:
τ =l
u+ β2
|ρl/λl − ρr/λr||ρl/λl + ρr/λr|
∆t. (4.74)
26

Chapter 5
The simplified BGK model of May
In the following section, modifications to the previously presented model of Xu are shown. Themodifications are based on the propositions of May [7] and aim to reduce the computing time.May is proposing a simplified distribution function f combining modifications for the constructionof the initial distribution function f0 and the determination of the term A in the development ofthe equilibrium distribution function g0.In a first step, the non-equilibrium term τ(au + A), coming directly from the Chapman-Enskogexpansion, is changed in the initial distribution function f0 of Xu (given by Eq. 4.9 and shownbelow):
f0 =
gl[1 + alx − τ(alu + Al)
], x ≤ 0,
gr [1 + arx − τ(aru + Ar)] , x > 0.
May supposes the coefficients of the non-equilibrium term to be directly dependent on the recon-structed equilibrium or relaxation state g0. For this reason he replaces the concerned terms by theformulation
f0 =
gl[1 + alx] − τg0[alu + A], x ≤ 0,
gr[1 + arx] − τg0[aru + A], x > 0.
(5.1)
Keeping in mind that the higher order terms with respect to τ of the Chapman-Enskog expansionhave to vanish by applying the conservation constraint (Eq. (4.10) and Eq. (4.11)), the followingcondition is found to determine the new coefficients A
∫
g0~ΨAdΘ = −
∫
g0~ΨuadΘ. (5.2)
The determination of the coefficients a is still based on the gradients obtained via the reconstructedstate ~w0 at the cell interfaces and the conservative variables at the corresponding cell centres.Though, their computation remains unchanged (cf. Eq. (4.43) and Eq. (4.44)).The relaxation state g is considered to remain unchanged in comparison to Xu:
g =
g0
[1 + alx + At
], x ≤ 0,
g0
[1 + arx + At
], x > 0,
In the subsequent step, the functions f0 and g are introduced into the solution of the BGK equation(Eq. (4.8)). With the help of the conservation constraint (Eq. (4.59)) we are able to determine the
27

new coefficients A. Contrary to the ones of Xu’s BGK model, they are no longer dependent on themoments linked to the coefficients A but are only determined by the coefficients a and a
∫
g0~ΨAdΘ =
∫
~Ψu(δ1agl,r + δ2ag0)dΘ, (5.3)
where the δi are obtained by applying the time integration of the conservation constraint (Eq. (4.59)).Having a closer look at the new coefficients A (Eq. (5.3)) it is obvious that they are very akin tothe lately introduced coefficients A as we can obtain them directly by using an unit weight for thefirst term of Eq. (5.3) and choosing δ2 = 0. May chooses therefore the two terms A and A to beequal.Finally, by applying Eq. (5.2), the terms A can be determined as follows:
M0αβAβ = − 1
ρ0
∫
u>0
∫g0a
luΨαdΘ −
1ρ0
∫
u<0
∫g0a
ruΨαdΘ. (5.4)
This ansatz has to be introduced in the equation for the distribution function f and leads finallyto the following result for the altered distribution function:
f =
(1 − e−t/τ )g0 + (te−t/τ − τ)arug0 + e−t/τ (1 − utar)gr + A(t − τ)g0; u < 0,
(1 − e−t/τ )g0 + (te−t/τ − τ)alug0 + e−t/τ (1 − utal)gl + A(t − τ)g0; u > 0.(5.5)
As a considerable part of the CPU time of the Xu model is used for the determination of the termsA, the basic merit of the modified approach is the reduction of computing time. It is obvious thatmuch more effort has to be undertaken to evaluate Eq. (4.60) than the newly developed Eq. (5.4).From now on, let BGKgg refer to the BGK scheme of May. In the following, the BGKgg scheme iscompared to the other gas-kinetic schemes for the treated test cases. In chapter 8, the results andthe performance of this scheme are examined.
28

Chapter 6
A gas-kinetic BGK scheme of higherorder
In this chapter, the author elaborates an extension of Xu’s BGK scheme to a higher order. The Xumodel can be considered as a second order scheme, as it is based upon the reconstructed interfacevalues of the MUSCL scheme (cf. chapter 2). Therefore, the extension is targeting to an orderhigher than two.The consideration of this higher order scheme is based on the already well known equations for thedevelopments of the initial gas distribution function f0 and the relaxation state g as they are givenby Eq. (4.9) and Eq. (4.12):
f0 =
gl[1 + alx − τ(alu + Al)
], x ≤ 0,
gr [1 + arx − τ(aru + Ar)] , x > 0,
g =
g0
[1 + alx + At
], x ≤ 0,
g0
[1 + arx + At
], x > 0.
These equations are based on a Taylor expansion of order one in space and time. Instead oftruncating this development after the linear terms, it will be extended to second order.In a first step we can thus rewrite the equations as follows:
f0 =
gl[1 + alx + blx2 − τ((al + 2blx)u + Al + C lx)
], x ≤ 0,
gr[1 + arx + brx2 − τ((ar + 2brx)u + Ar + Crx)
], x > 0,
(6.1)
g =
g0
[1 + alx + blx2 + At + Bt2 + Ctx
], x ≤ 0,
g0
[1 + arx + brx2 + At + Bt2 + Ctx
], x > 0.
(6.2)
For the sake of simplicity with respect to the evaluation of the gas-kinetic moments, it is supposedfor this first approach, that the development of all used coefficients is still truncated after the linearterms. This means for all the coefficients, that they are supposed to be of the same nature as the
29

ones that are used for the scheme of Xu, so that we can write them as:
al = al1 + al
2u + al3v + al
4w + al5
12(u2 + v2 + w2 + ξ2) = al
αΨα,
· · ·
A = Al + A2u + A3v + A4w + A512(u2 + v2 + w2 + ξ2) = Al
αΨα,
· · ·
C = C1 + C2u + C3v + C4w + C512 (u2 + v2 + w2 + ξ2) = C l
αΨα.
In the below paragraphs, the determination of the necessary coefficients will be introduced in asimilar way to the models of Xu and May. Again we will start with the calculation of the initialgas distribution function f0.
6.1 Determination of the coefficients for the initial gas distribu-tion function f0
The initial gas distribution is based on the Taylor expansion of the Maxwellian distributions g l,r
at the left and the right of the cell interface and the terms coming from the Chapman-Enskogexpansion.Considering the development of the Maxwellian at the cell interface located at x = xj+1/2 thecoefficients a and b can be determined. The notation is simplified by setting xj+1/2 = 0 and onefinds
g = gl,r
1 + x
1
gl,r
(∂gl,r
∂x
)
x=0︸ ︷︷ ︸
al,r
+x2 1
gl,r
(∂2gl,r
∂x2
)
x=0︸ ︷︷ ︸
bl,r
. (6.3)
In order to further simplify the notation, the indices l, r are omitted in the following.Multiplying the distribution with the vector of moments ~Ψ and integrating it by dΘ one obtainsthe relation
∫
g~ΨdΘ =
∫
g~ΨdΘ +
∫
xag~ΨdΘ +
∫
x2bg~ΨdΘ = ~w, (6.4)
that is directly linked to the conservative variables ~w. Moreover, the spatial derivation of Eq. (6.4)leads to the equations:
∂
∂x
∫
g~ΨdΘ =∫
ag~ΨdΘ + 2∫
xbg~ΨdΘ =∂
∂x~w, (6.5)
∂2
∂x2
∫
g~ΨdΘ = 2∫
bg~ΨdΘ =∂2
∂x2~w. (6.6)
30

Given the fact, that we want to evaluate the above equations at the location x = xj+1/2 = 0, wecan continue with the following set of equations
∂
∂x
∫
g~ΨdΘ =∫
ag~ΨdΘ =∂
∂x~w(xj+1/2), (6.7)
∂2
∂x2
∫
g~ΨdΘ = 2∫
bg~ΨdΘ =∂2
∂x2~w(xj+1/2), (6.8)
that allows the determination of the coefficients al,r and bl,r.The next step is dedicated to the non-equilibrium terms (al + 2blx)u + Al + C lx coming from theChapman-Enskog expansion. In general, all moments of terms, being linked to τ i (with i ≥ 1)coming from the Chapman-Enskog expansion, have to vanish through the course of the momentevaluation: ∫
gl,r[Al,r + C l,rx + u(al,r + 2bl,rx)]~ΨdΘ = 0. (6.9)
As this necessity has to be satisfied at any location x, one can therefore translate this conditioninto the following equation:
∫
gl,r[Al,r + ual,r]~ΨdΘ = 0. (6.10)
With the knowledge of the coefficients a one can easily determine the unknown A, in the same wayas it has already been done for the scheme of Xu (cf. Eq. (4.34) and Eq. (4.35)).The space-independent character of the development allows furthermore the hypothesis that thespace-dependent derivative of the above integral (cf. Eq. (6.9)) has also to vanish
∂
∂x
∫
gl,r[Al,r + C l,rx + u(al,r + 2bl,rx)]~ΨdΘ = 0,∫
gl,r[C l,r + 2bl,ru]~ΨdΘ = 0. (6.11)
Hence, with the determination of the last coefficient C we are now in possession of all the coefficientsfor the initial gas distribution f0. In the next section the determination of the relaxation state willbe introduced.
6.2 Determination of the coefficients for the relaxation state func-tion g
The relaxation state g is described by Eq. (6.2)
g =
g0
[1 + alx + blx2 + At + Bt2 + Ctx
], x ≤ 0,
g0
[1 + arx + brx2 + At + Bt2 + Ctx
], x > 0.
The proceeding for the determination of the coefficients a and b is similar to the computation ofthe a and b for the initial gas distribution function. This time, the Taylor expansion containsalso time-dependent terms. For a start the relaxation state is integrated by dΘ and the spatial
31

derivative, omitting the indices for the left and right side, is built:
∂
∂x
∫
g~ΨdΘ =∫
ag0~ΨdΘ + 2
∫xbg0
~ΨdΘ +∫
Ctg0~ΨdΘ =
∂
∂x~w0, (6.12)
∂2
∂x2
∫
g~ΨdΘ = 2∫
bg0~ΨdΘ =
∂2
∂x2~w0, (6.13)
with ~w0 being the conservative variables originating from the reconstructed equilibrium state g0 atthe cell interface. Again, the coefficients are supposed to be constant and we consider the aboveequations at the cell interface at x = xj+1/2 = 0 and at the time t = 0, which justifies the equations
∂
∂x
∫
g~ΨdΘ =∫
ag0~ΨdΘ =
∂
∂x~w0, (6.14)
∂2
∂x2
∫
g~ΨdΘ = 2∫
bg0~ΨdΘ =
∂2
∂x2~w0, (6.15)
that return the desired coefficients a and b.For the remaining unknowns A,B and C we use the conservation constraint existing for the equi-librium state distribution g and the gas distribution function f at any place and any time:
∫ ∫ ∆t
0(g − f)~ΨdtdΘ = 0, (6.16)
∫ ∫ ∆t
0
∂
∂x(g − f)~ΨdtdΘ = 0, (6.17)
∫ ∫ ∆t
0
∂
∂t(g − f)~ΨdtdΘ = 0. (6.18)
Having already defined the relaxation state g by Eq. (6.2), the gas distribution function f remainsto be computed with the help of Eq. (4.8)
f(xj+1/2, t, u, v, w, ξ) =1
τ
∫ t
0g(x′, t′, u, v, w, ξ)e−(t−t′ )/τ dt′ + e−t/τ f0(xj+1/2 − ut).
The exact solution of the BGK equation has to be integrated by dt′ in order to get the desiredsolution for f . Introducing the functions g and f0 into Eq. (4.8) and performing the integration,one gets :
f =g0[(1 + al,r(x − ut) + bl,r(x2 − 2xut + u2t2))γ∗
1+
(al,ru + bl,r(2xu − 2u2t) + A + C(x − ut))γ∗
0+
(bu2 + B + Cu)γ∗
2 ]+
e−t/τ gl,r(1 + al,r(x − ut) + bl,r(x − ut)2 − τ(al,ru + Al,r + (x − ut)(2ubl,r + C l,r))),
(6.19)
with the time-dependent coefficients γ∗
i
γ∗
0 = t + τ(e−t/τ − 1),
γ∗
1 = 1 − e−t/τ ,
γ∗
2 = 2τ2(1 − e−t/τ ) − t
(
2 − t
τ
)
.
32

In a next step the expression (g − f) can be calculated:
g − f =g0[(1 − γ∗
1)(1 + al,rx + bl,rx2) + γ∗
1(utal,r + bl,r(2xut − u2t2))+
(t − γ∗
0)(A + Cx) − γ∗
0(al,ru + 2bl,r(xu − u2t) − Cut)+
(t2 − γ∗
2)B − γ∗
2(bl,ru2 + Cu)]−e−t/τ gl,r(1 + al,r(x − ut) + bl,r(x − ut)2 − τ(al,ru + Al,r + (x − ut)(2bl,ru + C l,r))).
(6.20)
Moreover, the derivations for Eq. (6.17) and Eq. (6.18) can be determined. They have the followingform:∂
∂x(g − f) =g0[(1 − γ∗
1)(al,rx + 2bl,rx) + 2bl,rut+
(t − γ∗
0)C − γ∗
02bl,ru]−e−t/τ gl,r(1 + al,r + 2bl,rx − 2bl,rut − τ(2bl,ru + C l,r)),
∂
∂t(g − f) =g0[
∂(1 − γ∗1)
∂t(1 + ax + bx2) +
∂γ∗1
∂t(uta + b(2xut − u2t2) + γ∗
1(ua + b(2xu − 2u2t)))+
∂(t − γ∗0)
∂t(A + Cx)−
∂(γ∗0)
∂t(au + 2b(xu − u2t) − cut) + γ∗
0(2bu2 − cu)+
∂(t2 − γ∗2)
∂tB−
∂(γ∗2)
∂t(bu2 + Cu)]+
e−t/τ g(1 + a(x − ut) + b(x − ut)2 − τ(au + A + (x − ut)(2bu + C)))−e−t/τ g(−au + b(−2xu + 2u2t) + τu(2bu + C)),
(6.21)
where
∂γ∗0
∂t= 1 − e−t/τ ,
∂(t − γ∗0)
∂t= −e−t/τ ,
∂γ∗1
∂t=
1
τe−t/τ ,
∂(1 − γ∗1)
∂t= −1
τe−t/τ ,
∂(γ∗2)
∂t= 2τe−t/τ − 2(1 − t
τ),
∂(t2 − γ∗2)
∂t= 2t − 2τe−t/τ + 2(1 − t
τ).
Therefore it is evident that the equation system composed of the equations Eq. (6.16)-Eq. (6.18)has to be solved. Besides the evaluation of the moments, a temporal integration has to be donewithin the limits 0 and ∆t. As this temporal integration is limited to the terms containing the γ ∗
i ,the following integrals are sufficient:
∫ ∆t
0γ∗
0dt =1
2∆t2 − τ(∆t + τ(e−∆t/τ − τ)), (6.22)
∫ ∆t
0tγ∗
0dt =1
2∆t2 − τ(
1
2∆t2 + τe−∆t/τ (∆t + τ) − τ 2), (6.23)
33

∫ ∆t
0γ∗
1dt = ∆t + τ(e−∆t/τ − τ), (6.24)
∫ ∆t
0tγ∗
1dt =1
2∆t2 + τe−∆t/τ (∆t + τ) − τ 2), (6.25)
∫ ∆t
0t2γ∗
1dt =1
3∆t3 + τe−∆t/τ (2τ∆t + 2τ 2 + ∆t2) − 2τ3, (6.26)
∫ ∆t
0γ∗
2dt = 2τ2(∆t + τe−∆t/τ ) − (∆t2 − 1
3
∆t3
τ) − 2τ3. (6.27)
Moreover, the following time-dependent integrals have to be considered:
∫ ∆t
0te−t/τ dt = −τe−∆t/τ (∆t + τ) + τ 2, (6.28)
∫ ∆t
0t2e−t/τ dt = −τe−∆t/τ (∆t2 + 2τ2 + 2τ∆t) + 2τ 3. (6.29)
Taking into account the fact that the evaluation of the above moments (Eq. (6.16) to Eq. (6.18))is very costly, the author proposes a simplified model for the first approach.The simplification concerns the terms A, B and C that are bringing a time-dependency to theequilibrium state function. As their computation is very expensive, the simplified scheme is doingwithout them. Furthermore, the obtained results during the validation process (cf. chapter 8) forthe original Xu model justify the suppression of these terms for this first approach.Then the equation for the relaxation state g can be written as:
g =
g0
[1 + alx + blx2
], x ≤ 0,
g0
[1 + arx + brx2
], x > 0.
(6.30)
Introducing Eq. (6.1) and Eq. (6.30) into the exact solution of the BGK model (cf. Eq. (4.8)), oneobtains the gas distribution function f for the simplified model:
f =
R2g0 + R3arug0 + R5b
ru2g0 + R1(1 − u(t + τ)ar + bru2t(t + 2τ) − τAr + utτCr)gr; u < 0,
R2g0 + R3alug0 + R5b
lu2g0 + R1(1 − u(t + τ)al + blu2t(t + 2τ) − τAl + utτC l)gl; u > 0,
(6.31)where
R1 = e−t/τ ,
R2 = 1 − R1,
R3 = τ(−1 + R1) + tR1,
R5 = −t2R1 + 2tτR1 + 2τ2R2.
6.3 Computation of the coefficients b and b
Given the proposed simplified model without the terms A, B and C the computation of the newterms b and b has to be specified.
34

The new development for the gas distribution functions f0 and g is based on the two coefficients band b that are directly dependent on the second spatial derivative (cf. Eq. (6.8) and Eq. (6.15)).Like the gradients of the Xu scheme, the second derivative is also computed inside each cell as adecentred difference quotient. Like this, the coefficients b are determined as:
2
∫
blgl~ΨdΘ =1
∆x−(2 ~wj(xj+1/2) + 5 ~wj(xj+1/3) − 4 ~wj(xj+1/6) + ~wj(xj)), (6.32)
2
∫
brgr~ΨdΘ =1
∆x+(2 ~wj+1(xj+1/2) − 5 ~wj+1(xj+2/3) + 4 ~wj+1(xj+5/6) − ~wj+1(xj+1)), (6.33)
where ∆x− = 1/3(xj+1/2 −xj) and ∆x+ = 1/3(xj+1 −xj+1/2). This allows the introduction of thealready known equation system (cf. Eq. (4.23)):
1
2ρl∆x−(2 ~wj(xj+1/2) + 5 ~wj(xj+1/3) − 4 ~wj(xj+1/6) + ~wj(xj)) = Ml
αβblβ, (6.34)
1
2ρr∆x+(2 ~wj+1(xj+1/2) − 5 ~wj+1(xj+2/3) + 4 ~wj+1(xj+5/6) − ~wj+1(xj+1)) = Mr
αβbrβ, (6.35)
with β = 1, 2, 3, 4, 5 and the introduced matrices
Mlαβ =
1
ρl
∫
glΨαΨβdΘ,
Mrαβ =
1
ρr
∫
grΨαΨβdΘ.
In an analogous way, the coefficients b for the relaxation state function g can be computed. Natu-rally, we have to replace the above used Maxwellian distributions by the reconstructed Maxwelliang0 and the corresponding variables ~w0 at the cell interface:
2
∫
blg0~ΨdΘ =
1
∆x−(2 ~w0 + 5 ~wj(xj+1/3) − 4 ~wj(xj+1/6) + ~wj(xj)), (6.36)
2
∫
brg0~ΨdΘ =
1
∆x+(2 ~w0 − 5 ~wj+1(xj+2/3) + 4 ~wj+1(xj+5/6) − ~wj+1(xj+1)), (6.37)
with the formulations
1
2ρ0∆x−(2 ~w0 + 5 ~wj(xj+1/3) − 4 ~wj(xj+1/6) + ~wj(xj)) = M0
αβ blβ, (6.38)
1
2ρ0∆x+(2 ~w0 − 5 ~wj+1(xj+2/3) + 4 ~wj+1(xj+5/6) − ~wj+1(xj+1)) = M0
αβ brβ, (6.39)
with β = 1, 2, 3, 4, 5 and the matrix
M0αβ =
1
ρ0
∫
g0ΨαΨβdΘ.
For the practical evaluation of the above equations, some remarks are made. Firstly, the recon-struction of the values at the cell interfaces should no longer be based on the MUSCL scheme andthe author proposes the use of a WENO reconstruction method, as it is presented in [10]. Havinga look at the decentred difference quotients for the second derivative, one will see that there arefour points in each half of the cell needed. So the conservative variables at the locations xj+1/6,xj+1/3 and xj+2/3, xj+5/6 are unknown a priori. Thus, the author proposes to use the WENOinterpolation polynomial not only to reconstruct the value at the cell interface xi+1/2 but also tointerpolate the values at the needed locations.
35

36

Chapter 7
Implementation of the BGK schemein the elsA code
The above presented BGK schemes of Xu and May are implemented in the elsA code (ensemblelogiciel pour la simulation en Aerodynamique [1]). elsA is an Onera software co-developed byCerfacs that is able to treat internal and external flows as well as multidisciplinary aerodynamicapplications, including:
• aerodynamics, aeroelastics
• airplanes, helicopters, turbo-engines, missiles, rockets, air inlets, nozzles
• research and industrial applications
• Euler, RANS, U-RANS, DES, LES simulations
• hypothesis of pure ideal gas with a given value for the specific heat coefficient
• calculation of sensibility for ideal conception
The code is object-oriented and is written in C++ with routines of low-level calculation written inFORTRAN. Being one of the most popular languages for high-performance computing because ofits rapidity, the FORTRAN routines in the elsA code are used to perform extensive computations.The user interface is offered by a Python upper layer.
7.1 Coding of the BGK scheme
According to the structure of the elsA code, the BGK schemes are realised as a FORTRAN sub-routine. The code is implemented in the class of the convective upwind schemes. In the following,a brief summary of the methods’ implementation is given.
37

7.1.1 Initialization of the computation
In a first step the needed flow variables (conservative variables for the cell centres and reconstructedprimitive variables at the cell interfaces) are imported. Further informations concerning the mesh(number of grid points in the different directions, total cell number, normal vectors, coordinates ofcell centres and interface centres), the local time step and the reference variables for the computa-tion of the viscosity are transfered to the subroutine. The viscosity is computed with the help ofSutherland’s law.Foremost, as the scheme is realized as a directional splitting 3D scheme one has to determine thedirection for the flux calculation. In order to define the loops over the cells, the parameters forthe cell addresses and loop increments are determined to specify the calculation’s framework. Alsocoming along with the directional splitting is the transformation of the imported velocities to thelocal axis system. The x-direction of this system is based on the normal vector direction of theconsidered surface and it is a right-handed Cartesian axis system. After the transformation, theobtained velocities are used to evaluate the integrals of the Maxwellian distributions (cf. Eq. (4.17)-Eq. (4.19)) that are expressed in appendix B.
Providing the code with a maximum of flexibility we have decided to create a Python key al-lowing the user to run the kinetic solver in different versions. Besides the full BGK scheme, onehas the choice between the simplified BGK model without the term A, the BGKgg model of May[7] and the already discussed EFM scheme. The choice is made in the Python file. This file servesthe user as an interface to the elsA code. By entering the corresponding keys, the user specifiesthe configurations and options for the computation there. As for the selection of the gas-kineticscheme, the choice is directly translated into an integer variable, transfered to the subroutine, thatallows to distinguish the different cases during the run of the code.
Table 7.1: Different kinetic schemes available in the elsA code
Case Key Integer value
BGK scheme (Xu) bgk 0
BGK scheme simplified (without time-dependence) bgkred 1
EFM scheme efm 2
BGKgg scheme (May) bgkmay 3
7.1.2 The different computational algorithms
Having therefore finished the initialization of the computation, the used algorithms are presented.Based on the known distribution functions g l and gr in the left and right cell of the consideredinterface, the determination of the coefficients for the initial gas distribution function f0 and theequilibrium state function g for the gas-kinetic schemes is now shown. The corresponding flowchart is presented in Fig. 7.1.
38

The EFM scheme
Since the EFM scheme is not in need of any coefficients, the calculation for this case skips thecoefficient computation and gets back on the common track for the flux evaluation. The gasdistribution function f that is used for the flux computation (Eq. (6.31)) simply reduces to
f =
gr, u < 0,
gl, u > 0.
For the reason of compatibility and simplicity the flux evaluation is based on the same code linesfor all the implemented schemes. As none of the coefficients are calculated here, their value is setto zero. Furthermore, having a closer look at Eq. (6.31), presented below,
f =
R2g0 + R3arug0 + R4Ag0 + R1(1 − u(t + τ)ar)gr − R1τArgr; u < 0,
R2g0 + R3alug0 + R4Ag0 + R1(1 − u(t + τ)al)gl − R1τAlgl; u > 0,
the following choice is made in order to get the above Eq. (4.1):
R1 = 1,
R2 = 0.
The BGK scheme of Xu
The first coefficients to be evaluated are the variables ar and al (Eq. (4.20) and Eq. (4.21)).Due to the fact that their determination is based on the gradients of the conservative variablesinside the cells, we preliminary have to establish the computation of the cell centre coordinates forthe ghost cells, as this feature has not yet been realized in the elsA code. The coordinates are ob-tained by a simple extrapolation of the distance between cell centre and interface of the concernedboundary cells. As we are in need of the coordinates for the first ghost cell at the boundaries,the distance cell centre to cell interface is determined in each space direction in the last cell rows.Afterwards, the obtained distances are doubled and the new coordinates can be computed. Thisroutine is realized in a separate FORTRAN file that is located in the geometric section (GEO) ofelsA.Returning to the determination of the coefficients a we find ourselves confronted with the concreteevaluation of the above Eq. (4.20) and Eq. (4.21). Thanks to the known solution of the correspond-ing equation system (Eq. (4.23)) the solution can easily be determined.Proceeding the algorithm, the coefficients Ar and Al are found by taking into account Eq. (4.34)and Eq. (4.35) so that the initial gas distribution function f0 is finally known.In a second step the coefficients for the equilibrium state function g are determined. With thehelp of the Eq. (4.36), new conservative variables ~w0 at the cell interface can be evaluated. Thisproceeding is based on the assumption of a new equilibrium state g0 at the cell interface. Addi-tionally, we have to introduce the evaluation of the Maxwellian integrals for the half spaces (cf.appendix B). As the spatial development of g is akin to the spatial development of the initialgas distribution function f0 the computation of the ar and the al (Eq. (4.20) and Eq. (4.21)) issimilar to the determination of the ar and al. With regard to the gradients for the right hand side
39

of the equation system, one discovers that they are built within the concerned cell, regarding thereconstructed conservative values ~w0 at the cell interface and the conservative variables ~w at thecell centre.By introducing the previous results into the equation for the gas distribution function f we find anexpression (Eq. (6.31)) with the variable A as the only unknown that is evaluated by Eq. (4.60).For the further evaluation of the scheme, a distinction has to be made whether the current com-putation is an inviscid Euler one or a viscous Navier-Stokes one. This decision influences thedetermination of the collision time τ (Eq. (4.58)). In the event of a viscous computation, the col-lision time τ depends on the viscosity µ and an artificial numerical viscosity dependent on strongpressure gradients. This structure of τ guarantees sufficient viscosity in areas of discontinuities.Furthermore the molecular viscosity µ is evaluated with the Sutherland law (Eq. (4.56)). Thenecessary reference values (µ∞, T∞, S) are imported from the elsA main code, the temperature Tis derived from the reconstructed conservative variables ~w0 at the cell interface.In the case of the Euler equations, the determination of the collision time τ includes solely artificialviscosity.The above computations enable to determine the flux via Eq. (4.61). In the case of a viscous Navier-Stokes computation, the Prandtl number correction has to be established. As already describedabove, the BGK scheme is based on the assumption of an unitary Prandtl number. In order tobe able to run computations with any desired Prandtl number, the energy flux has to be modifiedsubsequently. This correction is taken into account by the expressions Eq. (4.63) for the correctedenergy flux and Eq. (4.64) for the involved heat flux. After the correction of the energy flux, theflux components including a velocity, namely Fn, Fm and Fo, that are still dependent on the localaxis system, have to be transfered back to the global axis system. Keeping in mind the fact thatall the components of the so far computed flux F are flux densities, one has also to consider thesurface area of the cell interface for which the flux is calculated. After this last multiplication, theflux variables can be handed over to the elsA code.
The simplified BGK model (without A)
Since a temporal development of the equilibrium state is e.g. not necessary for steady problems,the computation of A is not effected if the user chooses the reduced BGK model without the Aterm. This means that this computational part is skipped and A is set to zero
A = 0.
As all the other steps are equal to the complete BGK model, this is the only difference that has tobe taken into account for the coding of this BGK version.This model is denoted the simplified BGK model.
The BGKgg model of May
The gas-kinetic scheme of May is built upon the assumption of the dependency of the non-equilibrium term τ(au + A) on the reconstructed equilibrium or relaxation state g0. Therefore,
40

one arrives at the formulation
f =
(1 − e−t/τ )g0 + (te−t/τ − τ)arug0 + e−t/τ (1 − utar)gr + A(t − τ)g0; u < 0,
(1 − e−t/τ )g0 + (te−t/τ − τ)alug0 + e−t/τ (1 − utal)gl + A(t − τ)g0; u > 0,
where the terms A have vanished and the terms A have to be replaced by the coefficients A (cf.chapter 5).This changes are incorporated by the following measures: First of all, we do no longer compute thecoefficients A but initialize them directly as
A = 0.
With regard to the coefficients A, they formally replace the coefficients A. This means, that weskip the computation of the A and calculate the terms A instead. In order to still be able to usethe same code lines for the flux evaluation and the Prandtl number correction, the computed valuesfor the coefficients A (Eq. (5.4)) are written into the already allocated variables A.
41

?? ?
?
? ?
.
?
?
?
?
?
?
?
?
?
?
?
?
? ?
? ?
?
?
EFM
Left and right states gl and gr
Computation of the coefficients a
Computation of the coefficients A
Computation of the reconstructed state g0 at the cell interfaces
Computation of the coefficients a
Flux evaluation
Prandtl number correction
Computation coefficients A Computation coefficients A
BGK (without A) BGKggBGK complete
Figure 7.1: Flow chart for the different gas-kinetic schemes.
42

Chapter 8
Numerical experiments
In this chapter the above BGK schemes will be validated by various test cases ranging from one-dimensional shock tube problems to the turbulent steady flow over a flat plate and around theRAE2822 airfoil. Furthermore, the three-dimensional steady flow around the LANN wing is exam-ined.
8.1 Inviscid flow test cases
In this section we consider several test cases in combination with inviscid flow. At first, three one-dimensional shock tube problems will be treated. In the second part of the section, the results forthe NACA0012 and RAE2822 airfoil are presented. In this part, the influence of the parameters β1
and β2 on the collision time τ and therefore on the behaviour of the complete scheme is examined.This will reveal the different sensitivity of the used BGK schemes towards the coefficients β1 andβ2.
8.1.1 Shock tube problems
Several shock tube problems are computed in order to confirm the accuracy of the BGK scheme. Alltest cases are performed with a rectangular mesh of 200 cells. Moreover, the calculations are donewith the explicit scheme and the computational time is advanced with the Runge-Kutta method oforder two. The shock tube test case is shown in Fig. 8.1. As we can see, the tube has a right anda left part with uniform initial states and both sides are separated by a diaphragm. In order toclassify the results of the BGK scheme, they are compared on the one hand to the exact solutionof a Riemann solver, on the other hand the differences between the well establish Godunov typescheme of Roe and the EFM gas-kinetic scheme are demonstrated. This allows to judge the qualityof the BGK scheme in direct comparison to a less sophisticated kinetic scheme. In the followingwe always consider the solution for the instance t = 17.5s and all the computations are run withthe slope limiter of van Albada for the associated reconstruction, unless otherwise stated.
43

.
+
Diaphragm
pl, ρl, ul pr, ρr, ur
Figure 8.1: The shock tube.
Sod test case
The first test case is the classical Sod test. The left and right state are initialized by the followingvalues
ρl = 1.0, ul = 0.0, pl = 1;
ρr = 0.125, ur = 0.0, pr = 0.1;
and γ = 1.4.
The test case is performed with the time step ∆t = 0.05. Figure 8.2 illustrates the result for theBGK scheme. It is evident, that the gas-kinetic scheme is quite well approaching the exact solution.Yet, some spurious oscillations are created at the corner of the expansion. This behaviour is a proof
x
Den
sity
-20 0 20
0.2
0.4
0.6
0.8
1
BGKBGK (modified collision time)Exact
Figure 8.2: The Sod test case without and with additional viscosity.
of missing artificial viscosity. In a second run, we introduce the already discussed collision timemodification for Euler computations. According to Eq. (4.70), the parameter β1 is set to the value
44

β1 = 0.48 and the new result is also shown in Fig. 8.2. The careful choice of β1 allows to damp theoscillations without really degrading the solution. Alternatively the cell number can be increased,what leads to an increase of computing time.Regarding Fig. 8.3 it is evident that the second-order BGK scheme resolves shock and contactdiscontinuity wave better than the first-order one. Again, the computation is run with the param-eter β1 = 0.48. In the following, the BGK method is now compared to other numerical schemes.
x
Den
sity
-20 0 20
0.2
0.4
0.6
0.8
1
BGK first orderBGK second orderExact
Figure 8.3: Density distribution for the Sod test case from the first and second order BGK scheme.
Fig. 8.4 reveals the fact that the solutions for the BGK and the Roe scheme are nearly equivalent.However, the BGK scheme shows results that are slightly closer to the exact solution than thoseof the Roe scheme. As for the EFM scheme, it clearly uncovers an increased numerical dissipation:Being close to the other schemes approximating the shock, EFM is more diffusive than the othertwo for the contact discontinuity and the expansion.All the schemes are resolving the shock within four cells.
Subsonic/ supersonic test case
In this test case the flow inside the tube becomes supersonic. The initial states of the two tubehalves are quite similar to the Sod case, except that the left side is initialized with a constantvelocity ul.
ρl = 1.0, ul = 0.95, pl = 1.0;
ρr = 0.125, ur = 0.0, pr = 0.1;
and γ = 1.4.
The computation is run with the time step ∆t = 0.05. With regard to Fig. 8.5, the differences
45

x
Den
sity
-20 0 20
0.2
0.4
0.6
0.8
1
BGK (modified collision time)EFMRoeExact
Figure 8.4: The Sod test case for BGK with additional viscosity in comparison to other schemes.
between the considered schemes are small. Once again it is the EFM scheme that shows itselfto be the most diffusive approaching the expansion. This test case contains a sonic point alongthe rarefaction wave. It is well known that the Roe scheme normally gives an entropy violatingsolution for this case by producing an expansion shock. Thus, one introduces the entropy correctionof Harten to avoid this kind of phenomenon. However, the two gas-kinetic schemes are not in needof such an additional correction. As no oscillations are observed, the parameter β1 can be chosento β1 = 0 in order to prevent the solution to be smeared. The shock is captured by all the schemeswithin four cells.To assure a correct convergence behaviour, a second grid containing 400 cells is used for this shocktube problem. A continuous improvement of the results towards the exact solution has to comealong with a constant multiplication of the cell number. This behaviour can be observed for theBGK scheme in Fig. 8.6. By doubling the cell number, the exact solution is better approached.
Supersonic expansion with the appearance of vacuum
The third test case takes into account a supersonic expansion that leads to the creation of a vacuum.The two sides have the initial states
ρl = 1.0, ul = −2.0, pl = 0.4;
ρr = 1.0, ur = 2.0, pr = 0.4;
and γ = 1.4.
The test case is computed with the time step ∆t = 0.05 and Fig. 8.7 shows the solutions for thedifferent schemes at the instance t = 10s.
46

x
Den
sity
0 20 40
0.2
0.4
0.6
0.8
1
BGKEFMRoeExact
Figure 8.5: Subsonic/ supersonic test case.
In this last test case, the three schemes resolve quite well the exact solution. Yet, one has tokeep in mind that the Roe scheme can only be run with the correction of Harten. Furthermore thenecessary Harten parameter has to be considerably increased up to a value of 3.5. A closer lookreveals the differences between the two gas-kinetic schemes. In this case, the EFM scheme gives aslightly better approach of the exact solution, especially at the corners of the expansion. Again, tofurther improve the solution of the BGK scheme, one can use more cells.
47

x
Den
sity
0 20 40
0.2
0.4
0.6
0.8
1
BGK (400 cells)BGK (200 cells)Exact
Figure 8.6: Grid convergence.
x
Den
sity
-40 -20 0 20 40
0
0.2
0.4
0.6
0.8
1
1.2
1.4 BGKEFMRoeExact
Figure 8.7: Supersonic expansion test case.
48

8.1.2 Inviscid flow around the NACA0012 airfoil
The NACA0012 airfoil is considered in a transonic flow with a Mach number of M = 0.8 and anangle of attack of α = 1.25. The calculations are performed for Roe’s scheme and different versionsof the BGK scheme.For the computation of this test case we use the BGK and the Roe solver in combination withthe implicit scheme LUSSORSCA of elsA in order to perform more efficient runs. Further detailsconcerning the LUSSORSCA method can be found in appendix F. The first runs of this test caseshowed spurious oscillations in the shock structures of the suction side for the different BGK solvers.This problem can be fixed by introducing the already proposed modifications for the collision timeτ (see section 4.5.1). The constants β1 and β2 have to be chosen carefully with respect to the usedscheme.Moreover, the influence of the terms A, originating from the development of the equilibrium stateg, is showed for this steady state calculations.The mesh for the test case is shown in Fig. 8.8. It is a C grid that is cut into two blocks in thesymmetry plane of the airfoil. The mesh has a total number of 12288 cells. All calculations wereturned out over 10000 iterations in a first step. In order to guarantee a converged solution for thecomplete scheme of Xu and the BGKgg model, these two computations were continued up to 15000iterations.
Figure 8.8: C grid for the NACA0012 test case.
The results for the pressure distribution are shown in Fig. 8.9. It is obvious that all four schemesgive nearly similar results and only the BGKgg scheme of May shows minor differences in thepressure distribution. This fact becomes even more evident when we turn our interest directly tothe pressure distribution along the airfoil. The corresponding results are shown by Fig. 8.10.
The curve of the simplified Xu model without A, fits perfectly the solution of Roe. However, thecomplete BGK model shows a minor deviation from the Roe solution and the BGKgg model iseven more deviated from the other schemes, on suction and pressure side, near the leading edge.
49

x
z
0 0.0005 0.001
-0.0002
0
0.0002
0.0004
0.0006
0.0008
(a) Roe
x
z
0 0.0005 0.001
-0.0002
0
0.0002
0.0004
0.0006
0.0008
(b) BGK simplified
x
z
0 0.0005 0.001
-0.0002
0
0.0002
0.0004
0.0006
0.0008
(c) BGK complete
x
z
0 0.0005 0.001
-0.0002
0
0.0002
0.0004
0.0006
0.0008
(d) BGKgg
Figure 8.9: Pressure distribution around the NACA0012 airfoil in inviscid flow.
Yet, we find a sharper shock resolution on the suction side for the schemes BGK complete andBGKgg. The rather simple EFM scheme is in good accordance with the other schemes, but itsmore diffusive character is evident by considering the resolution of the two shocks. On the suctionside, the shock is resolved less sharply and EFM smears the shock over four cells, while Xu’s BGKscheme resolves it within three cells.In order to be able to compare the schemes, their convergence history is presented by Fig. 8.11.This figure serves as a first indicator for the concrete influence of the terms A. It is very obvious,that the simplified BGK model without the terms A converges much more faster (CFL = 10)than the other two models including a time dependent development for the equilibrium state g.Also, the simplified BGK scheme here is superior to the Roe scheme (CFL = 10) in terms ofconvergence. Among the schemes with the time-dependent development of the relaxation state,the BGKgg scheme is less restrictive and allows to use CFL = 2.5 while the complete Xu scheme isin need of CFL = 1.0. The EFM scheme shows also a rather slow convergence similar to complete
50

x
Pre
ssur
e
0 0.0002 0.0004 0.0006 0.0008 0.001
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
RoeBGK (simplified model)BGK (complete model)BGKggEFM
Figure 8.10: Pressure distribution along the NACA0012 airfoil for Roe and BGK.
Xu BGK model.The fact, that the time-dependent coefficients A are slowing down the convergence, as one is forcedto use smaller CFL numbers, was already stated in [2]. Because of their nature, it is probablymore suitable to use them for unsteady computations. Furthermore, their determination is quiteexpensive in terms of computing time, as it can be seen in Tab. 8.2. In the following, the examinationof this test case is firstly continued with the simplified BGK model without A in order to showthe influence of the coefficients β1 and β2 on the results. The effects of these parameters on thecomplete BGK and the BGKgg scheme are discussed after this brief excursion.Keeping in mind that the BGK scheme for the Euler calculations is always in need of the coefficientsβ1 and β2 for the collision time τ , their influence is examined. Therefore, several calculations areperformed with different values for β1 and β2 that are given by Tab. 8.1.
Table 8.1: Constants β1 and β2 for the BGK scheme.
configuration β1 β2
BGK 0.005 0.125
BGK A 0.005 1.0
BGK B 0.05 1.0
To show the influence of each parameter, three different configurations have been used. The firstconfiguration, BGK, serves as reference for the modifications of the other two, as it gives the closestresults to the solution of Roe. Fig. (8.12) demonstrates the effects. Starting from the configurationBGK, only the parameter β2 has been increased by applying the BGK A configuration. This means,that artificial viscosity is added in the neighbourhood of shocks. As expected, the results of BGKand BGK A are nearly identical and there are only differences for the shocks. Especially the shock
51

Iteration
Res
idua
lρ
0 2000 4000 6000 8000 10000
10-14
10-12
10-10
10-8
10-6
10-4
10-2
100
RoeBGK (simplified model)BGK (complete model)BGKggEFM
Figure 8.11: Convergence history of the density for the first 10000 iterations.
on the suction side is less well resolved as there are four cells needed for the approximation insteadof three. In a second step the value of β1 is increased by the factor 10. In the whole domain, theartificial viscosity is now increased, so that the curve moves away from the Roe solution everywhere.Furthermore, the weaker shock on the pressure side is strongly flattened and the shock on the upperside is resolved within five cells. Keeping in mind that we have first multiplied β2 by 8 without anyserious degradation of the solution, the multiplication of β1 by 10 has more effects on the qualityof the solution. This shows the immense influence of β1, that has to be chosen very carefully.Let us return to the BGK schemes of Xu and May, which contain the time-development for therelaxation state. The choice of the parameter βi for these schemes follows other aspects. Whileperforming this test case, the author noticed a less sensitive behaviour of those two solvers towardsthe coefficient β1. Chosen small enough, but still of sufficient magnitude, the solution can even beconsidered to be independent of this parameter. Otherwise, these two schemes show much moreoscillations at the shock regions, so that the value of β2 has to be increased considerably. In thiscase, the choice of β1 = 10−5 and β2 = 2.5 has been made for both schemes.As it is shown in chapter 4, the collision time for inviscid computations can also be determinedwith the help of the mean free path (cf. Eq. (4.74)) and the corresponding calculations for thistest case are carried out by using the modified expression for τ . The results of this computationsare identical to those that are obtained by applying the collision time model based on Eq. (4.70).However, the great advantage that is offered by this approach gets obvious by the fact that the userhas no longer to choose the parameter β1, what simplifies the application of the gas-kinetic solver.
Tab. 8.2 shows the differences in computing time for the two schemes. The BGK schemes aremore expensive in terms of CPU time. This statement is not too surprising, as the gas-kineticschemes are in need of more floating point operations than the solver of Roe.A closer look at the differences between the kinetic schemes reveals that the simplified BGK andthe BGKgg scheme are almost equal in terms of computing time. This fact can be easily explained
52

x
Pre
ssur
e
0 0.0002 0.0004 0.0006 0.0008 0.001
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
RoeBGKBGK ABGK B
Figure 8.12: Pressure distribution along the airfoil for different β1 and β2.
from the modality of coefficient computing. Both schemes do not use the very time intense com-putation of Xu’s A. While the simplified scheme is completely doing without them, the BGKggmodel is replacing them by the terms A. With reference to Eq. (5.2), they are determined in asimilar way to the coefficients A that are not necessary for the BGKgg scheme. This determinationcan be done by solving an equation system of the already known kind expressed in Eq. (4.23). Sothe gain in computing time is directly obvious compared with the computation of the terms A.
Table 8.2: Computing time per 10000 iterations for the inviscid calculation of the NACA0012 airfoiltest case.
Scheme Computing Time [s]
BGK (simplified) 1524.5 1.62
BGK (complete) 1686.15 1.79
BGKgg 1555.15 1.65
EFM 1404.49 1.49
Roe 941.8 1.
53

8.1.3 Inviscid flow around the RAE2822 airfoil
In this test case the inviscid transonic flow around the RAE2822 airfoil is computed. The airfoilis considered in a transonic flow with a Mach number of M = 0.734 and an angle of attack ofα = 2.54. The airfoil and the corresponding mesh are shown in Fig. 8.13.The computations are carried out for the simplified Xu BGK model, the EFM scheme and the Roesolver with the LUSSORSCA implicit scheme on the depicted mono-block mesh with 22528 cells.For all computations, the slope limiter of van Leer is used.
Figure 8.13: The RAE2822 airfoil.
Fig. 8.14 shows the computed solutions for the pressure distribution by EFM, the simplified BGKscheme and the Roe solver. Again, one can only find minor differences between the solvers. Re-garding the pressure distribution along the RAE2822 airfoil (Fig. 8.15) one can conclude that theBGK scheme is totally able to reproduce the solution of the Roe solver. Both solvers are capturingthe shock within three cells. Yet, the EFM scheme is using four cells for the shock capturing. Asfor the rest of the airfoil, a very good fit between the three solvers can be found.
For the sake of completeness it has to be mentioned, that the choice of the two parameters β1 andβ2 for the BGK scheme strongly influences the quality of the results. Tab. 8.3 gives the precisevalues used for this test case.
Table 8.3: Constants β1 and β2 for the BGK scheme.
configuration β1 β2
BGK 7.5 · 10−4 0.25
Tab. 8.4 shows the differences in computing time for the three schemes.
54

x
z
-0.0002 0 0.0002 0.0004 0.0006 0.0008 0.001-0.0002
0
0.0002
0.0004
0.0006
0.0008
(a) Roe
x
z
-0.0002 0 0.0002 0.0004 0.0006 0.0008 0.001-0.0002
0
0.0002
0.0004
0.0006
0.0008
(b) BGK simplified
x
z
-0.0002 0 0.0002 0.0004 0.0006 0.0008 0.001-0.0002
0
0.0002
0.0004
0.0006
0.0008
(c) EFM
Figure 8.14: Pressure distribution around the RAE2822 airfoil in inviscid flow.
For the complete Xu model and the BGKgg scheme of May, some difficulties have been encounteredfor the above test case. With the given configuration, the solution for these two schemes is notconverging. In order to obtain a good solution that is in accordance with the pressure distributionsshown above, the calculations have to be turned out with a global time step, instead of being ableto use a local one.
55

x
Pre
ssur
e
0 0.0002 0.0004 0.0006 0.0008 0.001
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
RoeBGK (simplified model)EFM
Figure 8.15: Pressure distribution along the RAE2822 airfoil for Roe, the simplified BGK modeland EFM.
Table 8.4: Computing time per 25000 iterations for the inviscid calculation of the RAE2822 airfoiltest case.
Scheme Computing Time [s]
BGK 7024.62 1.73
EFM 6116.69 1.51
Roe 4058.60 1.
56

8.2 Viscous flow test cases
In the following test cases, the viscous laminar and turbulent flow in two and three dimensions isexamined.Starting with the case of the laminar flat plate, one has the possibility to compare the results ofthe BGK model to the exact Blasius solution. The subsequent test cases consider two-dimensionalturbulent flows over the flat plate and around the RAE2822 airfoil. In a last test case, the three-dimensional turbulent flow around the LANN wing is examined.Having a closer look at the properties of the different coefficients of the gas-kinetic schemes, onediscovers that for viscous flow the terms a get dominant over the other coefficients of the develop-ment. Besides, the use of the terms A for the computation’s quality and performance is furthermoreconsidered.
8.2.1 Flat plate with laminar boundary layer
In this test case the laminar flow over a flat plate is modeled. We consider a laminar boundarylayer with the Mach number M = 0.15 and Re = 105 and use a rectangular mesh with 146 x 66grid points, which is shown in Fig. 8.16. The U velocity contours in the x direction are plotted inFig. 8.17.
Figure 8.16: Mesh with 146 x 66 grid points for the boundary layer calculation.
Figure 8.17: The velocity contours for the axial velocity U.
Fig. 8.18 and Fig. 8.19 show the U velocity distribution at the locations x = 0.1205 and x = 0.4858respectively. The solid line gives the exact Blasius solution. The used abscissa is the dimensionlessvariable η, determined by:
η = y
(Ue
νx
)0.5
, (8.1)
57

where Ue is the free stream velocity in x-direction outside the boundary layer and ν is the kinematicviscosity.It is evident that the solutions of all the BGK schemes fit very well the exact solution and is closerto it as the Roe solver. Let us first discuss the results of the simplified BGK model without theterms A. For x = 0.1205, this scheme fits almost perfectly the Blasius solution as the two curvesare nearly congruent. At the location x = 0.4858 the numerical solution of this BGK scheme isalso very close to the exact one and the shape of the velocity profile is well reproduced.The differences between the reduced and the complete BGK model are mostly negligible. Theyare most obvious for the upper region of the boundary layer at the location x = 0.1205. There,the solution of the full model is no longer congruent to the slope of the Blasius solution. It leavesthe curve and joins the solution of the Roe solver. However, in the further course of the plate, thesolution of the complete model is always slightly closer to the Blasius solution than the simplifiedone, but with a rather insignificant gain of precision.The modified scheme of May achieves also very good results. Notably at the location x = 0.4858and in the further course of the plate, the solution is practically identical to the complete BGKmodel of Xu.
η
U/U
e
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
BlasiusBGK (simplified model)BGK (complete model)RoeBGKgg
Figure 8.18: Velocity distribution along the vertical lines at x = 0.1205.
Having already discussed the solution’s quality, the performance of the kinetic schemes with regardto computing time and convergence has also to be considered. All computations were performedwith the help of the implicit LUSSORSCA scheme and carried out through the course of 100000iterations. They are of second order and the slope limiter of van Leer is used.The corresponding data for the computing time is presented in Tab. 8.5. First of all, the differencesin CPU time for the three kinetic schemes have to be discussed. Knowing that the determinationof the terms A is quite expensive, the extra costs can now be better quantified. In this special case,the full BGK model is in need of 10% more computing time than the simplified one. As the resultsare not realy better, one can abicate the use of these terms for steady calculations. Furthermore,they also have a very strong influence on the convergence as we can see in Fig. 8.20. Being able
58

η
U/U
e
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
BlasiusBGK (simplified model)BGK (complete model)RoeBGKgg
Figure 8.19: Velocity distribution along the vertical lines at x = 0.4858.
to run calculations with a CFL number of 100 or higher for the reduced model, the computationconverges relatively quick. Yet, the full BGK model forces the choice of CFL = 1, what slowsdown the convergence speed. The BGKgg scheme is able to work with CFL = 2.5. Therefore itconverges faster than the complete Xu model. In terms of computing time, it is comparable to thesimplified model of Xu. In order to be able to compare the convergence behaviour of the completeand the simplified Xu model, the CFL for the latter has also been reduced to CFL = 1. Theobtained residual curve is practically identical to the one of Xu’s complete scheme.Similar to the airfoil test cases, the extra costs in computing time are from the same order ofmagnitude for the reduced model, compared to the Roe solver. The complete kinetic BGK modelfinishes its calculation even after twice the time of Roe’s solver and the BGKgg scheme is also inneed of an increased CPU time.
Table 8.5: Computing time per 100000 iterations for the laminar flat plate test case.
Scheme Computing Time [s]
BGK (simplified) 9766.42 1.83
BGK (complete) 10742.66 2.01
BGKgg 9926.43 1.86
Roe 5337.63 1.
59

Iteration
Res
idua
lρu
0 20000 40000 60000 80000 100000
10-11
10-9
10-7
10-5
10-3
10-1
RoeBGK (simplified model)BGK (complete model)BGKggBGK (simplified, CFL=1)
Figure 8.20: Convergence history of ρu.
The influence of the slope limiter on the simplified BGK scheme
For the previous computations of the boundary layer, the slope limiter of van Leer has been usedfor all the numerical schemes. As the slope limiter is of great interest for the reconstruction process(cf. chapter 2) and therefore for the values at the cell interfaces, its influence is examined in thissection.In order to determine the influence of the slope limiter on the BGK scheme, the test case has alsobeen run with the minmod and the van Albada slope limiter. The results of the calculations areshown in Fig. 8.21 and Fig. 8.22.At the x-position x = 0.1205, the exact Blasius solution is reproduced by the BGK scheme withthe van Leer and the van Albada limiter. Yet, the use of the minmod limiter produces a visibledeviation in the upper region of the boundary layer.At x = 0.4858, the solutions of the BGK scheme are nearly congruent and the influence of thelimiter is less visible, but a closer look also exposes differences in the approximation of the upperboundary layer region.
60

η
U/U
e
0 1 2 3 4 5 6 70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
BlasiusBGK simplified (minmod)BGK simplified (van Albada)BGK simplified (van Leer)
Figure 8.21: Velocity distribution along the vertical lines at x = 0.1205 for several slope limiters.
η
U/U
e
0 1 2 3 4 5 6 70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
BlasiusBGK simplified (minmod)BGK simplified (van Albada)BGK simplified (van Leer)
Figure 8.22: Velocity distribution along the vertical lines at x = 0.4858 for several slope limiters.
61

8.2.2 Flat plate with turbulent boundary layer
The following test case of the turbulent boundary layer over a flat plate is run with a Mach numberof M = 0.15 and Re = 4 · 106. The flow is considered to be turbulent from the beginning of theplate (x = 0). The rectangular grid has 146 x 66 grid points and is identical to the one that is usedfor the test case of the laminar boundary layer and plotted in Fig. 8.16. Again, 100000 iterationshave been performed by using the LUSSORSCA method in combination with the van Leer slopelimiter and the turbulence model of Spalart and Allmaras.The presented results for the velocity U following the x direction are taken from the locationsx = 0.1205 and x = 0.4858.Fig. 8.23 and Fig. 8.24 illustrate the U velocity distribution for the different solvers. It is obviousthat the results for all gas-kinetic schemes are very close to each other and do not show anydifferences. Yet, the solution of Roe is identical to the velocity distribution of the BGK schemes inthe lower region of the boundary layer. Then one finds minor differences between the results of thegas-kinetic schemes and the Roe solver. In the upper region, the curves are rejoining each other,going to the free stream region with U/Ue = 1.
η
U/U
e
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
BGK (simplified model)BGK (complete model)BGKggRoe
Figure 8.23: Velocity distribution along the vertical lines at x = 0.1205.
Tab. 8.6 sums up the computing time. It is obvious that the relation between the Roe solver andthe different gas-kinetic schemes is still of the same order compared to the previous test cases.
62

η
U/U
e
0 10 20 300
0.2
0.4
0.6
0.8
1
BGK (simplified model)BGK (complete model)BGKggRoe
Figure 8.24: Velocity distribution along the vertical lines at x = 0.4858.
Table 8.6: Computing time per 100000 iterations for the turbulent flat plate test case.
Scheme Computing Time [s]
BGK (simplified) 12328.35 1.60
BGK (complete ) 13292.32 1.72
BGKgg 12488.79 1.62
Roe 7716.20 1.
63

8.2.3 The RAE2822 airfoil in viscous flow with a turbulent boundary layer
In the following, two test cases for the RAE2822 airfoil in turbulent flow are presented. For both ofthem the flow around the airfoil is supposed to be completely turbulent and they were investigatedexperimentally by Cook et al. [3]. They are denoted Case 9 and Case 10 and are described below.For the computations we use the LUSSORSCA method in combination with the van Leer slopelimiter, the turbulence model of Spalart and Allmaras and a C grid around the airfoil with a totalnumber of 22528 cells.
Case 9: Attached flow
This case is based on the following experimental parameters:
M = 0.730 Mach number
α = 3.19 angle of attack
Re = 6.5 · 106 Reynolds number
However with reference to Hellstrom et al. [4] the corrected initial flow parameters for the numericaltest are used:
M = 0.734 Mach number
α = 2.54 angle of attack
Re = 6.5 · 106 Reynolds number
Fig. 8.25 depicts the pressure contours around the RAE2822 airfoil. As we can see, the solver ofRoe and the gas-kinetic BGK schemes give almost similar results with minor differences in theshock region. Yet, the BGKgg and the complete Xu model show minor pressure oscillations inthe shock region. The contour lines on the pressure side are running quite equally for all schemes.After this first glimpse at the solutions, we turn our interest to the Cp distribution along the airfoil.For the present test case 9, experimental data is available from [3]. Therefore the Cp distributionis displayed in Fig. 8.26.
This figure confirms the first impression based on the pressure contour plots of Fig. 8.25: Thesolvers are very close to each other. They match the experimental data very well on the pressureside. On the suction side we see an important deviation from the experimental results near theleading edge. This can be explained by the laminar turbulent transition that occurs on the realairfoil and is not reproduced here, as we suppose the flow to be turbulent from the beginning. Thetwo schemes based on Xu’s model give almost identical results except for the leading edge. Theposition of the shock is slightly better predicted by the Roe scheme. Finally, the fit between BGK,BGK simplified, Roe’s scheme and the experimental data is very good.The simplified model of May shows a noticeable deviation from the other two BGK models nearthe leading edge, however it is rejoining these schemes for the resolution of the shock and the restof the suction side.
64

x
z
-0.2 0 0.2 0.4 0.6 0.8 1
-0.2
0
0.2
0.4
0.6
0.8
(a) Roe
x
z
-0.2 0 0.2 0.4 0.6 0.8 1
-0.2
0
0.2
0.4
0.6
0.8
(b) BGK simplified
x
z
-0.2 0 0.2 0.4 0.6 0.8 1
-0.2
0
0.2
0.4
0.6
0.8
(c) BGK complete
x
z
-0.2 0 0.2 0.4 0.6 0.8 1
-0.2
0
0.2
0.4
0.6
0.8
(d) BGKgg
Figure 8.25: Pressure distribution around the RAE2822 airfoil in turbulent flow - Case 9.
Tab. 8.7 sums up the computing time for the case 9 test. In comparison to the already performedruns on the flat plate in turbulent flow, we find similar factors for the relation between the gas-kinetic schemes and the solver of Roe.
Case 10: Separated flow
The more complicated case 10 contains the phenomenon of a separated flow after the shock on thesuction side. Again, the experimental free stream conditions
M = 0.750 Mach number
α = 3.19 angle of attack
Re = 6.2 · 106 Reynolds number
65

xxxxxxxxxx
xxx
xx
x
x
xxxxxxxxx
xx
xxxxxxxxx
x
x
x
x
xxxxxx
xxxxx
xx
xx x x x x x x x x x x
xx
x x x x x xx
x
Cp
0 0.2 0.4 0.6 0.8 1
-1
-0.5
0
0.5
1
BGK (simplified)BGK (complete)BGKggRoeExpx
Figure 8.26: Cp distribution along the RAE2822 airfoil in turbulent flow - Case 9.
Table 8.7: Computing time per 3000 iterations for the turbulent flow around the RAE2822 airfoil- Case 9.
Scheme Computing Time [s]
BGK (simplified) 950.50 1.56
BGK (complete) 1051.50 1.72
BGKgg 989.28 1.63
Roe 608.39 1.
have to be adjusted according to Hellstrom et al. [4] for the numerical test case:
M = 0.754 Mach number
α = 2.57 angle of attack
Re = 6.2 · 106 Reynolds number
The pressure contour plots for the airfoil (cf. Fig. 8.27) are quite equal to each other. Again, anoscillatory behaviour in the shock region for the complete scheme of Xu and the BGKgg scheme ofMay is visible.
Fig. 8.28 illustrates the Cp distribution along the airfoil for the considered test case where theexperimental data is taken from [3]. It is obvious, that all numerical schemes do not predictcorrectly the shock position. One finds the largest deviations on the suction side and among thegas-kinetic schemes, it is the BGKgg scheme that is deviated the most near the leading edge.
66

x
z
-0.2 0 0.2 0.4 0.6 0.8 1
-0.2
0
0.2
0.4
0.6
0.8
(a) Roe
x
z
-0.2 0 0.2 0.4 0.6 0.8 1
-0.2
0
0.2
0.4
0.6
0.8
(b) BGK simplified
x
z
-0.2 0 0.2 0.4 0.6 0.8 1
-0.2
0
0.2
0.4
0.6
0.8
(c) BGK complete
x
z
-0.2 0 0.2 0.4 0.6 0.8 1
-0.2
0
0.2
0.4
0.6
0.8
(d) BGKgg
Figure 8.27: Pressure distribution around the RAE2822 airfoil in turbulent flow - Case 10.
Tab. 8.8, containing the summary of the computing times for this case, shows the already wellknown factors for the gas-kinetic schemes in relation to Roe’s scheme.
67

xxxxxxxxxx
xxxxx
x
x
xxxxxxxxxx
x
x
xxxxxxxx
x
x
x
x
xxxxxxxxxxx
xx
xx
x x x x xx
x x x x xx
xx x x x x x
x
x
Cp
0 0.2 0.4 0.6 0.8 1
-1
-0.5
0
0.5
1
BGK (simplified)BGK (complete)BGKggRoeExpx
Figure 8.28: Cp distribution along the RAE2822 airfoil in turbulent flow - Case 10.
Table 8.8: Computing time per 3000 iterations for the turbulent flow around the RAE2822 airfoil- Case 10.
Scheme Computing Time [s]
BGK (simplified) 951.00 1.57
BGK (complete) 1041.13 1.72
BGKgg 994.19 1.64
Roe 604.78 1.
68

8.2.4 The LANN wing in viscous flow with a turbulent boundary layer
The LANN wing was originally developed by Lockheed, the U.S. Air Force, the NASA and theNetherlands in order to measure unsteady pressures at transonic speeds. The wing is designed in amoderate-aspect-ratio transport wing configuration and it has 12-percent-thick supercritical airfoilsections.
(a) Airfoil at wing root (b) Salmon-like airfoil
Figure 8.29: Different super-critic airfoils of the LANN wing at the same scale.
Table 8.9: Geometry of the LANN wing.
aspect ratio 7.92sweep 25.0
sweep at leading edge 27.493
sweep at trailing edge 16.908
wing torsion −4.8
chord at wing root 360.8mmwing span 1000.0mmwing surface 0.2526m2
In the following, the LANN wing is examined in a steady turbulent flow.
The steady flow test case
In the steady flow test case, we consider the LANN wing in a flow that has the following initial freestream conditions:
M = 0.822 Mach number
α = 0.6 angle of attack
Re = 7.31 · 106 Reynolds number
The computations were done with the LUSSORSCA scheme, the slope limiter of van Leer and theturbulence model of Spalart and Allmaras.
Figure 8.31 illustrates the Cp distributions at the six sections shown in Fig. 8.30. Besides the solverof Roe, for this test case the solver of Jameson has additionally be used.
69

0 %c
100 % c
25%
c
s = 1000, 0
rotation axis
y
224,0
360,8
200 325 475 650 825 950
Figure 8.30: Top view of the LANN wing (dimensions in mm).
In general, all the gas-kinetic schemes are relatively close to each other. They are approaching thesolution of the Roe solver quite well. The most important differences can be found for the shockson the suction side. The gas-kinetic schemes are predicting a slightly different shock position.Furthermore one can see minor differences appear near the leading edge. Again it is the BGKggscheme, that is deviated the most from the solution of Roe.Having a look at Fig. 8.31(b) and Fig. 8.31(f), the solver of Jameson is also deviating from Roe’ssolution and it produces an oscillation at the section 2.With regard to the computation time, the relations between the gas-kinetic schemes and the Roesolver are still of the same order as for the previously treated cases.
Table 8.10: Computing time per 10000 iterations for the steady turbulent flow around the LANNwing.
Scheme Computing Time [s]
BGK (simplified) 69942.73 1.89
BGK (complete) 75554.95 2.04
BGKgg 66996.63 1.81
Jameson 38197.87 1.03
Roe 36974.73 1.
70

-1.5
-1
-0.5
0
0.5
1
1.5 0 0.2 0.4 0.6 0.8 1
Cp
x/c
RoeJameson
complete BGKsimplified BGK
BGKgg
(a) Section 1 - 20%
-1.5
-1
-0.5
0
0.5
1
1.5 0 0.2 0.4 0.6 0.8 1
Cp
x/c
RoeJameson
complete BGKsimplified BGK
BGKgg
(b) Section 2 - 32.5%
-1.5
-1
-0.5
0
0.5
1
1.5 0 0.2 0.4 0.6 0.8 1
Cp
x/c
RoeJameson
complete BGKsimplified BGK
BGKgg
(c) Section 3 - 47.5%
-1
-0.5
0
0.5
1
1.5 0 0.2 0.4 0.6 0.8 1
Cp
x/c
RoeJameson
complete BGKsimplified BGK
BGKgg
(d) Section 4 - 65%
-1
-0.5
0
0.5
1
1.5 0 0.2 0.4 0.6 0.8 1
Cp
x/c
RoeJameson
complete BGKsimplified BGK
BGKgg
(e) Section 5 - 82.5%
-1
-0.5
0
0.5
1 0 0.2 0.4 0.6 0.8 1
Cp
x/c
RoeJameson
complete BGKsimplified BGK
BGKgg
(f) Section 6 - 95%
Figure 8.31: Pressure coefficient Cp at various sections of the LANN wing.
71

72

Chapter 9
Conclusion and perspectives
The goal of this work has been the integration of a gas-kinetic solver in the elsA code. Such ascheme is in principle based on the microscopic quantities of the flow and the corresponding gasdistribution function. Through the introduction of the corresponding moments, one can get thedesired macroscopic flow variables that are of general interest. This proceeding offers the advantageof computing convective and diffusive fluxes at once.In this report, Xu’s two-dimensional directional splitting method is extended to a three-dimensionalone. Furthermore, two simplified models are considered. The first one is based on the Xu modeland the second one has been proposed by May. Moreover, a gas-kinetic scheme of higher order,based on the Xu model is proposed by the author.During the integration and validation process of these methods, many discoveries have been made.On the one hand, they have revealed the characteristics of these schemes, on the other hand theyalso show the way to future developments that are still left to be done.During the performed test cases, the gas-kinetic schemes have proved to give good results that arein agreement with the exact solution and the results of other numerical schemes like those of Roeand Jameson. In the cases of the shock tube and the laminar flat plate, the BGK schemes of Xudeliver even better solutions than the solver of Roe. Yet, in the case of the three-dimensional LANNwing, all the gas-kinetic schemes predict the shock on the suction side at an other position thanthe solvers of Roe and Jameson. In general, the gas-kinetic solvers are more expensive in terms ofcomputing time, but the differences can possibly be reduced, as it will be further stated below.Moreover, the examination of the different BGK models reveals the differences between the schemes.As it can be seen, the terms A of Xu’s model can be omitted in nearly all of the examined test caseswithout decreasing the solution’s quality. Furthermore, this simplified version of the Xu scheme isconsiderably faster and more insensitive towards the increasing of the CFL number for the implicitphase of the elsA code. For a better understanding of the influence of the terms A, it will be usefulto have a look at unsteady flow test cases in order to study the behaviour of the solvers and to beable to better judge if these coefficients are really necessary for the scheme or not.Compared to the two Xu models, the scheme of May is slightly less accurate for the consideredcases. It also shows a high sensitivity towards the CFL number, yet the constraint is less restrictivethan for the complete Xu model. For the Xu model, only small values around CFL = 1 can beused where the scheme of May is also tolerating values up to CFL = 2.5 for implicit computations.For the inviscid Euler calculations the additional artificial viscosity terms β1 and β2 in the expres-
73

sion of the particle collision time have to be chosen carefully with respect to the used gas-kineticscheme. The replacement of β1 by a term based on the mean free path and the mean velocity ofthe particles in the concerned cell is presented by the author and tested for the NACA0012 airfoil.The results of this first runs have proved that this model is able to replace the coefficient β1. Yet,a further examination of this approach for other test cases is desirable.For the test case of the flat plate, the simplified BGK scheme has been run with different slopelimiters. For the future, a further examination of the slope limiter’s influence on the different gas-kinetic schemes can be done. In this context, one can also consider the possibility to modify thechoice of the reconstructed variables at the cell interfaces. For example it is possible to keep thereconstruction for the density and the velocities but to reconstruct the variable λ that is necessaryfor the BGK method, instead of the pressure.Moreover, with regard to the computation of turbulent flow, one can easily imagine that the be-haviour of the BGK schemes in combination with different turbulence models can also be of furtherinterest. Besides, the effect of the turbulent Prandtl number is not yet taken into account. Theelaboration of a corresponding correction for the temperature is also one of the future tasks.
Yet, there are still more points left for future work. At first, it is desirable to increase the computa-tional speed of the gas-kinetic schemes. The recently realized implementation of the BGK schemesto elsA has been done without paying too much attention on the optimization of the code. In orderto diminish the differences in computing time between the Roe scheme and the gas-kinetic solvers,it might be helpful to review the coded algorithm. For example, as it is very expensive to evaluatethe error function, this part of the code should definitely be checked precisely to find perhaps aquicker algorithm.An additional interest lies in the realization of a real multidimensional solver taking into accountall the velocity components and not only the normal ones, with respect to the considered interface.This can be of great interest for the simulation of a wave, not propagating in one of the the preferredmesh directions. Furthermore, the solver has to be extended in order to treat moving grids so thate.g. the pitching airfoil problem can be considered. For this case, the relations between particlevelocity, macroscopic flow velocity and mesh moving velocity have to be taken into account.Given the fact, that most of the examined test cases for the realized solvers have been transonicproblems, it is also of interest to further examine the behaviour of a gas-kinetic solver at lower flowvelocities.With reference to the presented gas-kinetic scheme of higher order, the implementation of thescheme in the elsA code and a subsequent, extensive examination of the elaborated reasoning byseveral test cases has to be done. In this context, the extension of this first approach to the moredetailed development for the gas distribution function including the time-dependent development(terms A, B and C) can also be considered. Furthermore, one can possibly develop other simplifiedmodels starting from the derived basis.
74

Bibliography
[1] L. Cambier and M. Gazaix. elsA: an efficient object-oriented solution to CFD complexity.In 40th AIAA Aerospace Science Meeting and Exhibit, Reno, pages 14–17. AIAA 2002-0108,January 2002.
[2] D. Chae, C. Kim, and O. Rho. Development of an improved gas-kinetic BGK scheme forinviscid and viscous flows. Journal of Computational Physics, 158:1–27, 2000.
[3] P.H. Cook, M.A. McDonald, and M.C.P. Firmin. Aerofoil RAE 2822 - Pressure Distributionsand Boundary Layer and Wake Measurements. AGARD Report, AR 138:pp. A6–1 to A6–77,1979.
[4] Hellstrom T. and Davidson L. and Rizzi A. Reynolds Stress Transport Modelling of TransonicFlow around The RAE2822 Airfoil. In AIAA, 32nd Aerospace Sciences Meeting, Reno, jan,1994.
[5] M. Lazareff, A.-M. Vuillot, and Laurent Cambier. elsA Theoretical Manual. ONERA-DSNA,2.0.04 edition, January 2005.
[6] G. May. A Kinetic Scheme for the Navier-Stokes Equations and High-Order Methods forHyperbolic Conservation Laws. Ph.D. Thesis, Stanford University, Stanford, 2006.
[7] G. May and A. Jameson. Improved Gaskinetic Multigrid Method for Three-Dimensional Com-putation of Viscous Flow. 17th AIAA Computational Fluid Dynamics Conference, Toronto,June 2005.
[8] G. May, B. Srinivasan, and A. Jameson. Calculating Three-Dimensional Transonic Flow usinga Gas-Kinetic BGK Finite-Volume Method. 43rd Aerospace Sciences Meeting and Exhibit,Reno, September 2005.
[9] T. Ohwada. On the Construction of Kinetic Schemes. Journal of Computational Physics,177:156–175, 2002.
[10] C.-W. Shu. Essentially Non-Oscillatory and Weighted Essentially Non-Oscillatory Schemes forHyperbolic Conservation Laws. Institute for Computer Applications in Science and Engineer-ing NASA/CR-97-206253, NASA Langley Research Center, Hampton,VA, 1997.
[11] C.T. Tian, K. Xu, K.L. Chan, and L.C. Deng. A three-dimensional multidimensional gas-kinetic scheme for the Navier-Stokes equations under gravitational fields. Journal of Compu-tational Physics, 226:2003–2027, 2007.
75

[12] K. Xu. Numerical Hydrodynamics from Gas-Kinetic Theory. Ph.D. Thesis, Columbia Univer-sity, New York, 1993.
[13] K. Xu. A Gas-Kinetic BGK Scheme for the Navier-Stokes Equations and Its connection withArtificial Dissipation and Godunov Method. Journal of Computational Physics, 171:289–335,2001.
76

Appendix A
The Chapman-Enskog Expansion ofthe BGK Equation
The basic idea of the Chapman-Enskog expansion consists in the construction of a solution to thekinetic equation
∂f
∂t+ ui
∂f
∂xi=
g − f
τ, (A.1)
with the distribution function f , the equilibrium distribution function g and the collision timeτ , for which the time and space dependence can be expressed through the hydrodynamic flowvariables. The expansion is based on the development of the distribution function f with regardto the collision time τ :
f =∑
n
τnfn. (A.2)
If we assume that the distribution function f is dependent on space and time only through the setof the macroscopic conservative flow variables ~w we state that
f = f(u, ~w(x, t),∇~w(x, t),∇2 ~w(x, t), · · · ). (A.3)
An analogous series expansion for the macroscopic variables is undertaken as
∂ ~w
∂t= ~Ψ0(~w) + τ ~Ψ1(~w,∇~w) + τ 2~Ψ2(~w,∇~w,∇2 ~w), · · · ). (A.4)
Now, the chain rule can be applied so that
∂f
∂t=
∂f
∂ ~w
∂ ~w
∂t+
∂f
∂∇~w
∂∇~w
∂t+ · · · . (A.5)
Introducing the series expansion for f in the Eq. (A.1) and regrouping the terms with respect toτ , we get the formulation
∑
l+m=k−1
(∂fl
∂ ~w~Ψm +
∂fl
∂∇~w∇~Ψm +
∂fl
∂∇2 ~w∇2~Ψm
)
+ ui∂fk−1
∂xi= −fk, (A.6)
77

that is valid for k ≥ 1.For k = 0 the solution f0 = g is given for the BGK equation. This corresponds to a local equilib-rium state, described by the Maxwellian distribution. This collision-less formulation of the kineticequation leads directly to the Euler equations by introducing the respective moments ~Ψα.For k = 1 we get:
τ
(∂f0
∂t+ ui
∂f0
∂xi
)
= g − (f0 + τf1),
(A.7)
f1 = −∂g
∂t+ ui
∂g
∂xi,
(A.8)
f1 = −∂f0
∂ ~w~Ψ0 + ui
∂f0
∂xi. (A.9)
This equation leads directly to the Navier-Stokes equations. In the case of n ≥ 2, one can getequations that are of higher order than the Navier-Stokes equations.Finally for the case n = 1, we find the following formulation for the initial distribution function bytaking into account the Taylor development of the Maxwellian distribution g
f = f0 + τf1,
f = g − τ(ft + ugx),
f = g(1 + ax − τ(au + A)). (A.10)
In the case of the higher order scheme of chapter 6, the above derivations of f and g give thefollowing result:
f = g(1 + ax + bx2 − τ((a + 2bx)u + A + Cx)). (A.11)
78

Appendix B
Moments of the MaxwellianDistribution Function
According to [13], the integrals
< · · · >=
∫
(· · · )g · dudvdwdξ, (B.1)
have the following solutions:
< ξ2 > =K
2λ, (B.2)
< ξ4 > =3K
4λ2+
K(K − 1)
4λ2, (B.3)
< 1 > = 1, (B.4)
< u > = U, (B.5)
< u2 > = U2 +1
2λ, (B.6)
< u3 > = U3 + 1.5U
λ, (B.7)
< u4 > = U4 +3U2
λ+
0.75
λ2, (B.8)
< u5 > = U5 +5U3
λ+ 3.75
U
λ2. (B.9)
79

For the integrals in the half space from 0 to +∞, the complementary error function appears in theformulations
< 1 >>0 = E1, (B.10)
< u >>0 = UE1 + E2, (B.11)
< u2 >>0 = U2E1 + 2UE2 + E3, (B.12)
< u3 >>0 = U3E1 + 3U2E2 + 3UE3 + E4, (B.13)
< u4 >>0 = U4E1 + 4U3E2 + 6U2E3 + 4UE4 + E5, (B.14)
< u5 >>0 = U5E1 + 5U4E2 + 10U3E3 + 10U2E4 + 5UE5 + E6, (B.15)
< u6 >>0 = U6E1 + 6U5E2 + 15U4E3 + 20U3E4 + 15U2E5 + 6UE6 + E7, (B.16)
where
E1 =1
2erfc(−
√λU),
E2 =1
2
e−λU2
√πλ
,
E3 = −UE2 +1
2
E1
λ,
E4 = U2E2 +E2
λ,
E5 = −U3E2 +3
2
E3
λ,
E6 = U4E2 + 2E4
λ,
E7 = −U5E2 +5
2
E5
λ.
Similar formulations are obtained for the integral boundaries −∞ to 0
< 1 ><0 = G1, (B.17)
< u ><0 = UG1 + G2, (B.18)
< u2 ><0 = U2G1 + 2UG2 + G3, (B.19)
< u3 ><0 = U3G1 + 3U2G2 + 3UG3 + G4, (B.20)
< u4 ><0 = U4G1 + 4U3G2 + 6U2G3 + 4UG4 + G5, (B.21)
< u5 ><0 = U5G1 + 5U4G2 + 10U3G3 + 10U2G4 + 5UG5 + G6, (B.22)
< u6 ><0 = U6G1 + 6U5G2 + 15U4G3 + 20U3G4 + 15U2G5 + 6UG6 + G7, (B.23)
80

where
G1 =1
2erfc(
√λU),
G2 = −1
2
e−λU2
√πλ
,
G3 = −UG2 +1
2
G1
λ,
G4 = U2G2 +G2
λ,
G5 = −U3G2 +3
2
G3
λ,
G6 = U4G2 + 2G4
λ,
G7 = −U5G2 +5
2
G5
λ.
81

82

Appendix C
The right hand side of the equationsystem for the coefficients A
For the evaluation of the coefficients A, one needs the right hand side of the equation systemEq. (4.60). The following equations contain the evaluated components:
c1 =γ1+
< 1r ><0 D1+ < 1l >>0 D2+
< u0 ><0 D3+ < u0 >>0 D4+
< ur ><0 D5+ < ul >>0 D6+
< u20 ><0 D7+ < u2
0 >>0 D8+
< u2r ><0 D9+ < u2
l >>0 D10+
< u30 ><0 D11+ < u3
0 >>0 D12+
< u3r ><0 D13+ < u3
l >>0 D14,
c2 = < u0 > γ1+
< ur ><0 D1+ < ul >>0 D2+
< u20 ><0 D3+ < u2
0 >>0 D4+
< u2r ><0 D5+ < u2
l >>0 D6+
< u30 ><0 D7+ < u3
0 >>0 D8+
< u3r ><0 D9+ < u3
l >>0 D10+
< u40 ><0 D11+ < u4
0 >>0 D12+
< u4r ><0 D13+ < u4
l >>0 D14,
83

c3 = < v0 > γ1+
< 1r ><0< vr >ρr
ρ0(γ3 + γ5(A
r1 + Ar
4 < wr > +1
2Ar
5(< w2r > + < ξ2
r >)))+
< 1l >>0< vl >ρl
ρ0(γ3 + γ5(A
l1 + Al
4 < wl > +1
2Al
5(< w2l > + < ξ2
l >)))+
< u0 ><0< v0 > γ2(ar1 + ar
4 < w0 > +1
2ar
5(< w20 > + < ξ2
0 >))+
< u0 >>0< v0 > γ2(al1 + al
4 < w0 > +1
2al
5(< w20 > + < ξ2
0 >))+
< ur ><0< vr >ρr
ρ0[(γ4 + γ5)(a
r1 + ar
4 < wr > +1
2ar
5(< w2r > + < ξ2
r >)) + γ5Ar2]+
< ul >>0< vl >ρl
ρ0[(γ4 + γ5)(a
l1 + al
4 < wl > +1
2al
5(< w2l > + < ξ2
l >)) + γ5Al2]+
γ2[< u20 ><0< v0 > ar
2+ < u0 ><0< v20 > ar
3 +1
2ar
5(< u30 ><0< v0 > + < u0 ><0< v3
0 >)]+
γ2[< u20 >>0< v0 > al
2+ < u0 >>0< v20 > al
3 +1
2al
5(< u30 >>0< v0 > + < u0 >>0< v3
0 >)]+
ρr
ρ0(γ4 + γ5)[< u2
r ><0< vr > ar2+ < ur ><0< v2
r > ar3 +
1
2ar
5(< u3r ><0< vr > + < ur ><0< v3
r >)]+
ρl
ρ0(γ4 + γ5)[< u2
l >>0< vl > al2+ < ul >>0< v2
l > al3 +
1
2al
5(< u3l >>0< vl > + < ul >>0< v3
l >)]+
ρr
ρ0γ5[< 1r ><0< v2
r > Ar3 +
1
2Ar
5(< u2r ><0< vr > + < 1r ><0< v3
r >)]+
ρl
ρ0γ5[< 1l >>0< v2
l > Al3 +
1
2Al
5(< u2l >>0< vl > + < 1l >>0< v3
l >)],
84

c4 = < w0 > γ1+
< 1r ><0< wr >ρr
ρ0(γ3 + γ5(A
r1 + Ar
3 < vr > +1
2Ar
5(< v2r > + < ξ2
r >)))+
< 1l >>0< wl >ρl
ρ0(γ3 + γ5(A
l1 + Al
3 < vl > +1
2Al
5(< v2l > + < ξ2
l >)))+
< u0 ><0< w0 > γ2(ar1 + ar
3 < v0 > +1
2ar
5(< v20 > + < ξ2
0 >))+
< u0 >>0< w0 > γ2(al1 + al
3 < v0 > +1
2al
5(< v20 > + < ξ2
0 >))+
< ur ><0< wr >ρr
ρ0[(γ4 + γ5)(a
r1 + ar
3 < vr > +1
2ar
5(< v2r > + < ξ2
r >)) + γ5Ar2]+
< ul >>0< wl >ρl
ρ0[(γ4 + γ5)(a
l1 + al
3 < vl > +1
2al
5(< v2l > + < ξ2
l >)) + γ5Al2]+
γ2[< u20 ><0< w0 > ar
2+ < u0 ><0< w20 > ar
4 +1
2ar
5(< u30 ><0< w0 > + < u0 ><0< w3
0 >)]+
γ2[< u20 >>0< w0 > al
2+ < u0 >>0< w20 > al
4 +1
2al
5(< u30 >>0< w0 > + < u0 >>0< w3
0 >)]+
ρr
ρ0(γ4 + γ5)[< u2
r ><0< wr > ar2+ < ur ><0< w2
r > ar4+
1
2ar
5(< u3r ><0< wr > + < ur ><0< w3
r >)]+
ρl
ρ0(γ4 + γ5)[< u2
l >>0< wl > al2+ < ul >>0< w2
l > al4+
1
2al
5(< u3l >>0< wl > + < ul >>0< w3
l >)]+
ρr
ρ0γ5[< 1r ><0< w2
r > Ar4 +
1
2Ar
5(< u2r ><0< wr > + < 1r ><0< w3
r >)]+
ρl
ρ0γ5[< 1l >>0< w2
l > Al4 +
1
2Al
5(< u2l >>0< wl > + < 1l >>0< w3
l >)],
85

c5 =1
2[(< u2
0 > +L0)γ1 +ρr
ρ0γ3(< u2
r ><0 + < 1r ><0 LR) +ρl
ρ0γ3(< u2
l >>0 + < 1l >>0 LL)+
γ2[ar1(< u3
0 ><0 + < u0 ><0 L0) + ar2(< u4
0 ><0 + < u20 ><0 L0) + ar
3(< u0 ><0< v30 > +
< v0 > (< u30 ><0 + < u0 ><0 (< w2
0 > + < ξ20 >))) + ar
4(< u0 ><0< w30 > +
< w0 > (< u30 ><0 + < u0 ><0 (< v2
0 > + < ξ20 >))) +
1
2ar
5(< u50 ><0 + < u0 ><0 (< w4
0 > +
< v40 > + < ξ4 >) + 2(< u3
0 ><0 L0+ < u0 ><0 (< v20 > (< w2
0 > + < ξ20 >)+
< w20 >< ξ2
0 >)))]+
γ2[al1(< u3
0 >>0 + < u0 >>0 L0) + al2(< u4
0 >>0 + < u20 >>0 L0) + al
3(< u0 >>0< v30 > +
< v0 > (< u30 >>0 + < u0 >>0 (< w2
0 > + < ξ2 >))) + al4(< u0 >>0< w3
0 > +
< w0 > (< u30 >>0 + < u0 >>0 (< v2
0 > + < ξ2 >))) +1
2al
5(< u50 >>0 + < u0 >>0 (< w4
0 > +
< v40 > + < ξ4 >) + 2(< u3
0 >>0 L0+ < u0 >>0 (< v20 > (< w2
0 > + < ξ20 >)+
< w20 >< ξ2
0 >)))]+
(γ4 + γ5)ρr(ar
1(< u3r ><0 + < ur ><0 LR) + ar
2(< u4r ><0 + < u2
r ><0 LR) + ar3(< u3
r ><0< vr > +
< ur ><0< v3r > + < ur ><0< vr > (< w2
r > + < ξ2r >)) + ar
4(< u3r ><0< wr > +
< ur ><0< w3r > + < ur ><0< wr > (< v2
r > + < ξ2r >)) +
1
2ar
5(< u5r ><0 + < ur ><0 (< v4
r > +
< w4r > + < ξ4
r >) + 2(< u3r ><0 LR+ < ur ><0 (< v2
r > (< w2r > + < ξ2
r >)+ < w2r >< ξ2
r >)))+
(γ4 + γ5)ρl(al
1(< u3l >>0 + < ul >>0 LL) + al
2(< u4l >>0 + < u2
l >>0 LL) + al3(< u3
l >>0< vl > +
< ul >>0< v3l > + < ul >>0< vl > (< w2
l > + < ξ2l >)) + al
4(< u3l >>0< wl > + < ul >>0< w3
l > +
< ul >>0< wl > (< v2l > + < ξ2
l >)) +1
2al
5(< u5l >>0 + < ul >>0 (< v4
l > + < w4l > + < ξ4
l >)+
2(< u3l >>0 LL+ < ul >>0 (< v2
l > (< w2l > + < ξ2
l >)+ < w2l >< ξ2
l >)))+
ρr
ρ0γ5(A
r1(< u2
r ><0 + < 1r ><0 LR) + Ar2(< u3
r ><0 + < ur ><0 LR) + Ar3(< 1r ><0< v3
r > +
< vr > (< u2r ><0 + < 1r ><0 (< w2
r > + < ξ2r >))) + Ar
4(< 1r ><0< w3r > + < wr > (< u2
r ><0 +
< 1r ><0 (< v2r > + < ξ2
r >))) +1
2Ar
5(< u4r ><0 + < 1r ><0 (< v4
r > + < w4r > + < ξ4
r >)+
2(< u2r ><0 LR+ < 1r ><0 (< v2
r > (< w2r+ < ξ2
r >)+ < w2r >< ξ2
r >))))+
ρl
ρ0γ5(A
l1(< u2
l >>0 + < 1l >>0 LL) + Al2(< u3
l >>0 + < ul >>0 LL) + Al3(< 1l >>0< v3
l > +
< vl > (< u2l >>0 + < 1l >>0 (< w2
l > + < ξ2l >))) + Al
4(< 1l >>0< w3l > + < wl > (< u2
l >>0 +
< 1l >>0 (< v2l > + < ξ2
l >))) +1
2Al
5(< u4l >>0 + < 1l >>0 (< v4
l > + < w4l > + < ξ4
l >)+
2(< u2l >>0 LL+ < 1l >>0 (< v2
l > (< w2l + < ξ2
l >)+ < w2l >< ξ2
l >))))],
86

where
LR = < v2r > + < w2
r > + < ξ2r >,
LL = < v2l > + < w2
l > + < ξ2l >,
D1 =ρr
ρ0(γ3 + γ5(A
r1 + Ar
3 < vr > +Ar4 < wr > +
1
2Ar
5LR)),
D2 =ρl
ρ0(γ3 + γ5(A
l1 + Al
3 < vl > +Al4 < wl > +
1
2Al
5LL)),
D3 = γ2(ar1 + ar
3 < v0 > +ar4 < w0 > +
1
2ar
5L0),
D4 = γ2(al1 + al
3 < v0 > +al4 < w0 > +
1
2al
5L0),
D5 =ρr
ρ0[(γ4 + γ5)(a
r1 + ar
3 < vr > +ar4 < wr > +
1
2ar
5LR) + γ5Ar2],
D6 =ρl
ρ0[(γ4 + γ5)(a
l1 + al
3 < vl > +al4 < wl > +
1
2al
5LL) + γ5Al2],
D7 = γ2ar2,
D8 = γ2al2,
D9 =ρr
ρ0[(γ4 + γ5)a
r2 +
1
2γ5A
r5],
D10 =ρl
ρ0[(γ4 + γ5)a
l2 +
1
2γ5A
l5],
D11 =1
2γ2a
r5,
D12 =1
2γ2a
l5,
D13 =1
2
ρr
ρ0(γ4 + γ5)a
r5,
D14 =1
2
ρl
ρ0(γ4 + γ5)a
l5.
87

88

Appendix D
The evaluated Flux Components
The five time-averaged flux components are obtained by the integration of Eq. (4.62) and can bewritten as:
Fρ = < u0 > H1−< ur ><0 H2− < ul >>0 H3+
< u20 ><0 H4+ < u2
0 >>0 H5−< u2
r ><0 H6− < u2l >>0 H7+
< u30 ><0 H8+ < u3
0 >>0 H9−< u3
r ><0 H10− < u3l >>0 H11+
< u40 ><0 H12+ < u4
0 >>0 H13−< u4
r ><0 H14− < u4l >>0 H15,
(D.1)
Fm = < u20 > H1−
< u2r ><0 H2− < u2
l >>0 H3+
< u30 ><0 H4+ < u3
0 >>0 H5−< u3
r ><0 H6− < u3l >>0 H7+
< u40 ><0 H8+ < u4
0 >>0 H9−< u4
r ><0 H10− < u4l >>0 H11+
< u50 ><0 H12+ < u5
0 >>0 H13−< u5
r ><0 H14− < u5l >>0 H15,
(D.2)
89

Fn = < u0 >< v0 > ρ0(R∗
2 + R∗
4(A1 + A4 < w0 > +1
2A5(< w2
0 > + < ξ20 >)))+
R∗
4ρ0(A3 < u0 >< v20 > +
1
2A5(< u3
0 >< v0 > + < u0 >< v30 >))−
< ur ><0< vr > ρrR∗
1(−1 + τ(Ar1 + Ar
4 < wr > +1
2Ar
5(< w2r > + < ξ2
r >)))−
< ul >>0< vl > ρlR∗
1(−1 + τ(Al1 + Al
4 < wl > +1
2Al
5(< w2l > + < ξ2
l >)))+
< u20 ><0< v0 > ρ0(R
∗
4A2 + R∗
3(ar1 + ar
4 < w0 > +1
2ar
5(< w20 > + < ξ2
0 >)))+
< u20 >>0< v0 > ρ0(R
∗
4A2 + R∗
3(al1 + al
4 < w0 > +1
2al
5(< w20 > + < ξ2
0 >)))−
< u2r ><0< vr > ρr(R∗
1τAr2 + SR∗
1(ar1 + ar
4 < wr > +1
2ar
5(< w2r > + < ξ2
r >)))−
< u2l >>0< vl > ρl(R∗
1τAl2 + SR∗
1(al1 + al
4 < wl > +1
2al
5(< w2l > + < ξ2
l >)))−
R∗
1τρr(Ar3 < ur ><0< v2
r > +1
2Ar
5(< u3r ><0< vr > + < ur ><0< v3
r >))−
R∗
1τρl(Al3 < ul >>0< v2
l > +1
2Al
5(< u3l >>0< vl > + < ul >>0< v3
l >))+
R∗
3ρ0(ar2 < u3
0 ><0< v0 > +ar3 < u2
0 ><0< v20 > +
1
2ar
5(< u40 ><0< v0 > + < u2
0 ><0< v30 >))+
R∗
3ρ0(al2 < u3
0 >>0< v0 > +al3 < u2
0 >>0< v20 > +
1
2al
5(< u40 >>0< v0 > + < u2
0 >>0< v30 >))−
SR∗
1ρr(ar
2 < u3r ><0< vr > +ar
3 < u2r ><0< v2
r > +1
2ar
5(< u4r ><0< vr > + < u2
r ><0< v3r >))−
SR∗
1ρl(al
2 < u3l >>0< vl > +al
3 < u2l >>0< v2
l > +1
2al
5(< u4l >>0< vl > + < u2
l >>0< v3l >)),
(D.3)
90

Fo = < u0 >< w0 > ρ0(R∗
2 + R∗
4(A1 + A3 < v0 > +1
2A5(< v2
0 > + < ξ20 >)))+
R∗
4ρ0(A4 < u0 >< w20 > +
1
2A5(< u3
0 >< w0 > + < u0 >< w30 >))−
< ur ><0< wr > ρrR∗
1(−1 + τ(Ar1 + Ar
3 < vr > +1
2Ar
5(< v2r > + < ξ2
r >)))−
< ul >>0< wl > ρlR∗
1(−1 + τ(Al1 + Al
3 < vl > +1
2Al
5(< v2l > + < ξ2
l >)))+
< u20 ><0< w0 > ρ0(R
∗
4A2 + R∗
3(ar1 + ar
3 < v0 > +1
2ar
5(< v20 > + < ξ2
0 >)))+
< u20 >>0< w0 > ρ0(R
∗
4A2 + R∗
3(al1 + al
3 < v0 > +1
2al
5(< v20 > + < ξ2
0 >)))−
< u2r ><0< wr > ρr(R∗
1τAr2 + SR∗
1(ar1 + ar
3 < vr > +1
2ar
5(< v2r > + < ξ2
r >)))−
< u2l >>0< wl > ρl(R∗
1τAl2 + SR∗
1(al1 + al
3 < vl > +1
2al
5(< v2l > + < ξ2
r >)))−
R∗
1τρr(Ar4 < ur ><0< w2
r > +1
2Ar
5(< u3r ><0< wr > + < ur ><0< w3
r >))−
R∗
1τρl(Al4 < ul >>0< w2
l > +1
2Al
5(< u3l >>0< wl > + < ul >>0< w3
l >))+
R∗
3ρ0(ar2 < u3
0 ><0< w0 > +ar4 < u2
0 ><0< w20 > +
1
2ar
5(< u40 ><0< w0 > + < u2
0 ><0< w30 >))+
R∗
3ρ0(al2 < u3
0 >>0< w0 > +al4 < u2
0 >>0< w20 > +
1
2al
5(< u40 >>0< w0 > + < u2
0 >>0< w30 >))−
SR∗
1ρr(ar
2 < u3r ><0< wr > +ar
4 < u2r ><0< w2
r > +1
2ar
5(< u4r ><0< wr > + < u2
r ><0< w3r >))−
SR∗
1ρl(al
2 < u3l >>0< wl > +al
4 < u2l >>0< w2
l > +1
2al
5(< u4l >>0< wl > + < u2
l >>0< w3l >)),
(D.4)
91

FE =1
2[R∗
2ρ0(< u30 > + < u0 > L0) + R∗
4ρ0[A1(< u30 > + < u0 > L0)+
A2(< u40 > + < u2
0 > L0) + A3(< u30 >< v0 > + < u0 > (< v3
0 > +
< v0 > (< w20 > + < ξ2
0 >))) + A4(< u30 >< w0 > + < u0 > (< w3
0 > +
< w0 > (< v20 > + < ξ2
0 >))) +1
2A5(< u5
0 > +2 < u30 > L0+
< u0 > (< v40 > + < w4
0 > + < ξ40 > +2(< v2
0 > (< w20 > + < ξ2
0 >)+ < w20 >< ξ2
0 >)))]+
R∗
1ρr((1 − τAr
1)(< u3r ><0 + < ur ><0 LR) − τ(Ar
2(< u4r ><0 + < u2
r ><0 LR)+
Ar3(< u3
r ><0< vr > + < ur ><0 (< v3r > + < vr > (< w2
r > + < ξ2r >)))+
Ar4(< u3
r ><0< wr > + < ur ><0 (< w3r > + < wr > (< v2
r > + < ξ2r >)))+
1
2Ar
5(< u5r ><0 +2 < u3
r ><0 LR+ < ur ><0 (< v4r > + < w4
r > + < ξ4r > +
2(< v2r > (< w2
r > + < ξ2r >)+ < w2
r >< ξ2r >)))))+
R∗
1ρl((1 − τAl
1)(< u3l ><0 + < ul >>0 LL)) − τ(Al
2(< u4l >>0 + < u2
l >>0 LL)+
Al3(< u3
l >>0< vl > + < ul >>0 (< v3l > + < vl > (< w2
l > + < ξ2l >)))+
Al4(< u3
l >>0< wl > + < ul >>0 (< w3l > + < wl > (< v2
l > + < ξ2l >)))+
1
2Al
5(< u5l >>0 +2 < u3
l >>0 LL+ < ul >>0 (< v4l > + < w4
l > + < ξ4l > +
2(< v2r > (< w2
r > + < ξ2r >)+ < w2
r >< ξ2r >))))+
R∗
3ρ0[ar1(< u4
0 ><0 + < u20 ><0 L0) + ar
2(< u50 ><0 + < u3
0 ><0 L0)+
ar3(< u4
0 ><0< v0 > + < u20 ><0 (< v3
0 > + < v0 > (< w20 > + < ξ2
0 >)))+
ar4(< u4
0 ><0< w0 > + < u20 ><0 (< w3
0 > + < w0 > (< v20 > + < ξ2
0 >)))+
1
2ar
5(< u60 ><0 +2 < u4
0 ><0 L0+ < u20 ><0 (< v4
0 > + < w40 > + < ξ4
0 > +
2(< v20 > (< w2
0 > + < ξ20 >)+ < w2
0 >< ξ20 >)))]+
R∗
3ρ0[al1(< u4
0 >>0 + < u20 >>0 L0) + al
2(< u50 >>0 + < u3
0 >>0 L0)+
al3(< u4
0 >>0< v0 > + < u20 >>0 (< v3
0 > + < v0 > (< w20 > + < ξ2
0 >)))+
al4(< u4
0 >>0< w0 > + < u20 >>0 (< w3
0 > + < w0 > (< v20 > + < ξ2
0 >)))+
1
2al
5(< u60 >>0 +2 < u4
0 >>0 L0+ < u20 >>0 (< v4
0 > + < w40 > + < ξ4
0 > +
2(< v20 > (< w2
0 > + < ξ20 >)+ < w2
0 >< ξ20 >)))]−
SR∗
1ρr[ar
1(< u4r ><0 + < u2
r ><0 LR) + ar2(< u5
r ><0 + < u3r ><0 LR)+
ar3(< u4
r ><0< vr > + < u2r ><0 (< v3
r > + < vr > (< w2r > + < ξ2
r >)))+
ar4(< u4
r ><0< wr > + < u2r ><0 (< w3
r > + < wr > (< v2r > + < ξ2
r >)))+
1
2ar
5(< u6r ><0 +2 < u4
r ><0 LR+ < u2r ><0 (< v4
r > + < w4r > + < ξ4
r > +
2(< v2r > (< w2
r > + < ξ2r >)+ < w2
r >< ξ2r >)))]−
92

SR∗
1ρl[al
1(< u4l >>0 + < u2
l >>0 LL) + al2(< u5
l >>0 + < u3l >>0 LL)+
al3(< u4
l >>0< vl > + < u2l >>0 (< v3
l > + < vl > (< w2l > + < ξ2
r >)))+
al4(< u4
l >>0< wl > + < u2l >>0 (< w3
l > + < wl > (< v2l > + < ξ2
l >)))+
1
2al
5(< u6l >>0 +2 < u4
l >>0 LL+ < u2l >>0 (< v4
l > + < w4l > + < ξ4
l > +
2(< v2l > (< w2
l > + < ξ2l >)+ < w2
l >< ξ2l >)))]],
(D.5)
with
H1 = ρ0(R∗
2 + R∗
4(A1 + A3 < v0 > +A4 < w0 > +1
2A5L0)),
H2 = ρrR∗
1(τ(Ar1 + Ar
3 < vr > +Ar4 < wr > +
1
2Ar
5LR) − 1),
H3 = ρlR∗
1(τ(Al1 + Al
3 < vl > +Al4 < wl > +
1
2Al
5LL) − 1),
H4 = ρ0(R∗
4A2 + R∗
3(ar1 + ar
3 < v0 > +ar4 < w0 > +
1
2ar
5L0)),
H5 = ρ0(R∗
4A2 + R∗
3(al1 + al
3 < v0 > +al4 < w0 > +
1
2al
5L0)),
H6 = ρr[R∗
1τAr2 + SR∗
1(ar1 + ar
3 < vr > +ar4 < wr > +
1
2ar
5LR)],
H7 = ρl[R∗
1τAl2 + SR∗
1(al1 + al
3 < vl > +al4 < wl > +
1
2al
5LL)],
H8 = ρ0(1
2R∗
4A5 + R∗
3ar2),
H9 = ρ0(1
2R∗
4A5 + R∗
3al2),
H10 = ρr(1
2R∗
1τAr5 + SR∗
1ar2),
H11 = ρl(1
2R∗
1τAl5 + SR∗
1al2),
H12 =1
2ρ0R
∗
3ar5,
H13 =1
2ρ0R
∗
3al5,
H14 =1
2ρrSR∗
1ar5,
H15 =1
2ρlSR∗
1al5.
93

The integration of the time-dependent flux components for the Xu BGK scheme is performed inthe following way:
R∗
1 = 1∆t
∫ ∆t0 R1dt = 1
∆t
∫ ∆t0 e
−tτ dt = τ
∆t(1 − e−∆t
τ ), (D.6)
R∗
2 = 1∆t
∫ ∆t0 R2dt = 1
∆t
∫ ∆t0 (1 − e
−tτ )dt = 1 − τ
∆t(1 − e−∆t
τ ), (D.7)
R∗
3 = 1∆t
∫ ∆t0 R3dt = 1
∆t
∫ ∆t0 (τ(e
−tτ − 1) + te
−tτ )dt
= 2 τ2
∆t(1 − e−∆t
τ ) − τ(1 + e−∆t
τ ), (D.8)
R∗
4 = 1∆t
∫ ∆t0 R4dt = 1
∆t
∫ ∆t0 (τ( t
τ − 1 + e−tτ )dt
= 12∆t − τ + τ2
∆t(1 − e−∆t
τ ), (D.9)
SR∗
1 = 1∆t
∫ ∆t0 (t + τ)R1dt = 1
∆t
∫ ∆t0 (t + τ)e
−tτ dt
= −τe−∆t
τ + 2 τ2
∆t(1 − e−∆t
τ ). (D.10)
For the BGKgg scheme of May, the following results are obtained:
R∗
1 = 1∆t
∫ ∆t0 e
−tτ dt = τ
∆t(1 − e−∆t
τ ), (D.11)
R∗
2 = 1∆t
∫ ∆t0 (1 − e−
tτ )dt = 1 − τ
∆t (1 − e−∆tτ ), (D.12)
R∗
3 = 1∆t
∫ ∆t0 (te−
tτ − τ)dt = −τe−
∆tτ (1 + τ
∆t) + τ2
∆t − τ, (D.13)
R∗
4 = 1∆t
∫ ∆t0 (t − τ)dt = 1
2∆t − τ, (D.14)
SR∗
1 = 1∆t
∫ ∆t0 (te−
tτ )dt = −τe−
∆tτ (1 + τ
∆t ) + τ2
∆t . (D.15)
94

Appendix E
The Prandtl number correction
The evaluated components for the Prandtl number correction can be written as:
∫
fdΘ =R∗
2ρ0 + R∗
4ρ0(A1 + A2 < u0 > +A3 < v0 > +A4 < w0 > +1
2A5(< u2
0 > +L0))+
R∗
1(ρr < 1r ><0 +ρl < 1l >>0)−
R∗
1τρr(< 1r ><0 (Ar1 + Ar
3 < vr > +Ar4 < wr >) + Ar
2 < ur ><0 +
1
2Ar
5(< u2r ><0 + < 1r ><0 LR))−
R∗
1τρl(< 1l >>0 (Al1 + Al
3 < vl > +Al4 < wl >) + Al
2 < ul >>0 +
1
2Al
5(< u2l >>0 + < 1l >>0 LL))+
R∗
3ρ0(< u0 ><0 (ar1 + ar
3 < v0 > +ar4 < w0 >) + ar
2 < u20 ><0 +
1
2ar
5(< u30 ><0 + < u0 ><0 L0))+
R∗
3ρ0(< u0 >>0 (al1 + al
3 < v0 > +al4 < w0 >) + al
2 < u20 >>0 +
1
2al
5(< u30 >>0 + < u0 >>0 L0))−
SR∗
1ρr(< ur ><0 (ar
1 + ar3 < vr > +ar
4 < wr >) + ar2 < u2
r ><0 +
1
2ar
5(< u3r ><0 + < ur ><0 LR))−
SR∗
1ρl(< ul >>0 (al
1 + al3 < vl > +al
4 < wl >) + al2 < u2
l >>0 +
1
2al
5(< u3l >>0 + < ul ><0 LL)),
95

∫
vfdΘ =R∗
2ρ0 < v0 > +R4ρ0(< v0 > (A1 + A2 < u0 > +A4 < w0 >) + A3 < v20 > +
1
2A5(< u2
0 >< v0 > + < v30 > + < v0 > (< w2
0 > + < ξ20 >)))+
R∗
1(ρr < 1r ><0< vr > +ρl < 1l >>0< vl >)−
R∗
1τρr(< vr > (< 1r ><0 (Ar1 + Ar
4 < wr >) + Ar2 < ur ><0) + Ar
3 < 1r ><0< v2r > +
1
2Ar
5(< u2r ><0< vr > + < 1r ><0 (< v3
r > + < vr > (< w2r > + < ξ2
r >))))−
R∗
1τρl(< vl > (< 1l >>0 (Al1 + Al
4 < wl >) + Al2 < ul >>0) + Al
3 < 1l >>0< v2l > +
1
2Al
5(< u2l >>0< vl > + < 1l >>0 (< v3
l > + < vl > (< w2l > + < ξ2
l >))))+
R∗
3ρ0(< v0 > (< u0 ><0 (ar1 + ar
4 < w0 >) + ar2 < u2
0 ><0) + ar3 < u0 ><0< v2
0 > +
1
2ar
5(< u30 ><0< v0 > + < u0 ><0 (< v3
0 > + < v0 > (< w20 > + < ξ2
0 >))))+
R∗
3ρ0(< v0 > (< u0 >>0 (al1 + al
4 < w0 >) + al2 < u2
0 >>0) + al3 < u0 >>0< v2
0 > +
1
2al
5(< u30 >>0< v0 > + < u0 >>0 (< v3
0 > + < v0 > (< w20 > + < ξ2
0 >))))−
SR∗
1ρr(< vr > (< ur ><0 (ar
1 + ar4 < wr >) + ar
2 < u2r ><0) + ar
3 < ur ><0< v2r > +
1
2ar
5(< u3r ><0< vr > + < ur ><0 (< v3
r > + < vr > (< w2r > + < ξ2
r >))))−
SR∗
1ρl(< vl > (< ul >>0 (al
1 + al4 < wl >) + al
2 < u2l >>0) + al
3 < ul >>0< v2l > +
1
2al
5(< u3l >>0< vl > + < ul >>0 (< v3
l > + < vl > (< w2l > + < ξ2
l >)))),∫
wfdΘ =R∗
2ρ0 < w0 > +R∗
4ρ0(< w0 > (A1 + A2 < u0 > +A3 < v0 >) + A4 < w20 > +
1
2A5(< u2
0 >< w0 > + < w30 > + < w0 > (< v2
0 > + < ξ20 >)))+
R∗
1(ρr < 1r ><0< wr > +ρl < 1l >>0< wl >)−
R∗
1τρr(< wr > (< 1r ><0 (Ar1 + Ar
3 < vr >) + Ar2 < ur ><0) + Ar
4 < 1r ><0< w2r > +
1
2Ar
5(< u2r ><0< wr > + < 1r ><0 (< w3
r > + < wr > (< v2r > + < ξ2
r >))))−
R∗
1τρl(< wl > (< 1l >>0 (Al1 + Al
3 < vl >) + Al2 < ul >>0) + Al
4 < 1l >>0< w2l > +
1
2Al
5(< u2l >>0< wl > + < 1l >>0 (< w3
l > + < wl > (< v2l > + < ξ2
l >))))+
R∗
3ρ0(< w0 > (< u0 ><0 (ar1 + ar
3 < v0 >) + ar2 < u2
0 ><0) + ar4 < u0 ><0< w2
0 > +
1
2ar
5(< u30 ><0< w0 > + < u0 ><0 (< w3
0 > + < w0 > (< v20 > + < ξ2
0 >))))+
R∗
3ρ0(< w0 > (< u0 >>0 (al1 + al
3 < v0 >) + al2 < u2
0 >>0) + al4 < u0 >>0< w2
0 > +
1
2al
5(< u30 >>0< w0 > + < u0 >>0 (< w3
0 > + < w0 > (< v20 > + < ξ2
0 >))))−
SR∗
1ρr(< wr > (< ur ><0 (ar
1 + ar3 < vr >) + ar
2 < u2r ><0) + ar
4 < ur ><0< w2r > +
1
2ar
5(< u3r ><0< wr > + < ur ><0 (< w3
r > + < wr > (< v2r > + < ξ2
r >))))−
SR∗
1ρl(< wl > (< ul >>0 (al
1 + al3 < vl >) + al
2 < u2l >>0) + al
4 < ul >>0< w2l > +
1
2al
5(< u3l >>0< wl > + < ul >>0 (< w3
l > + < wl > (< v2l > + < ξ2
l >)))),
96

∫
v2fdΘ =R∗
2ρ0 < v20 > +R∗
4ρ0(< v20 > (A1 + A2 < u0 > +A4 < w0 >) + A3 < v3
0 > +
1
2A5(< u2
0 >< v20 > + < v4
0 > + < v20 > (< w2
0 > + < ξ20 >)))+
R∗
1(ρr < 1r ><0< v2
r > +ρl < 1l >>0< v2l >)−
R∗
1τρr(< v2r > (< 1r ><0 (Ar
1 + Ar4 < wr >) + Ar
2 < ur ><0) + Ar3 < 1r ><0< v3
r > +
1
2Ar
5(< u2r ><0< v2
r > + < 1r ><0 (< v4r > + < v2
r > (< w2r > + < ξ2
r >))))−
R∗
1τρl(< v2l > (< 1l >>0 (Al
1 + Al4 < wl >) + Al
2 < ul >>0) + Al3 < 1l >>0< v3
l > +
1
2Al
5(< u2l >>0< v2
l > + < 1l >>0 (< v4l > + < v2
l > (< w2l > + < ξ2
l >))))+
R∗
3ρ0(< v20 > (< u0 ><0 (ar
1 + ar4 < w0 >) + ar
2 < u20 ><0) + ar
3 < u0 ><0< v30 > +
1
2ar
5(< u30 ><0< v2
0 > + < u0 ><0 (< v40 > + < v2
0 > (< w20 > + < ξ2
0 >))))+
R∗
3ρ0(< v20 > (< u0 >>0 (al
1 + al4 < w0 >) + al
2 < u20 >>0) + al
3 < u0 >>0< v30 > +
1
2al
5(< u30 >>0< v2
0 > + < u0 >>0 (< v40 > + < v2
0 > (< w20 > + < ξ2
0 >))))−
SR∗
1ρr(< v2
r > (< ur ><0 (ar1 + ar
4 < wr >) + ar2 < u2
r ><0) + ar3 < ur ><0< v3
r > +
1
2ar
5(< u3r ><0< v2
r > + < ur ><0 (< v4r > + < v2
r > (< w2r > + < ξ2
r >))))−
SR∗
1ρl(< v2
l > (< ul >>0 (al1 + al
4 < wl >) + al2 < u2
l >>0) + al3 < ul >>0< v3
l > +
1
2al
5(< u3l >>0< v2
l > + < ul >>0 (< v4l > + < v2
l > (< w2l > + < ξ2
l >)))),∫
w2fdΘ =R∗
2ρ0 < w20 > +R∗
4ρ0(< w20 > (A1 + A2 < u0 > +A3 < v0 >) + A4 < w3
0 > +
1
2A5(< u2
0 >< w20 > + < w4
0 > + < w20 > (< v2
0 > + < ξ20 >)))+
R∗
1(ρr < 1r ><0< w2
r > +ρl < 1l >>0< w2l >)−
R∗
1τρr(< w2r > (< 1r ><0 (Ar
1 + Ar3 < vr >) + Ar
2 < ur ><0) + Ar4 < 1r ><0< w3
r > +
1
2Ar
5(< u2r ><0< w2
r > + < 1r ><0 (< w4r > + < w2
r > (< v2r > + < ξ2
r >))))−
R∗
1τρl(< w2l > (< 1l >>0 (Al
1 + Al3 < vl >) + Al
2 < ul >>0) + Al4 < 1l >>0< w3
l > +
1
2Al
5(< u2l >>0< w2
l > + < 1l >>0 (< w4l > + < w2
l > (< v2l > + < ξ2
l >))))+
R∗
3ρ0(< w20 > (< u0 ><0 (ar
1 + ar3 < v0 >) + ar
2 < u20 ><0) + ar
4 < u0 ><0< w30 > +
1
2ar
5(< u30 ><0< w2
0 > + < u0 ><0 (< w40 > + < w2
0 > (< v20 > + < ξ2
0 >))))+
R∗
3ρ0(< w20 > (< u0 >>0 (al
1 + al3 < v0 >) + al
2 < u20 >>0) + al
4 < u0 >>0< w30 > +
1
2al
5(< u30 >>0< w2
0 > + < u0 >>0 (< w40 > + < w2
0 > (< v20 > + < ξ2
0 >))))−
SR∗
1ρr(< w2
r > (< ur ><0 (ar1 + ar
3 < vr >) + ar2 < u2
r ><0) + ar4 < ur ><0< w3
r > +
1
2ar
5(< u3r ><0< w2
r > + < ur ><0 (< w4r > + < w2
r > (< v2r > + < ξ2
r >))))−
SR∗
1ρl(< w2
l > (< ul >>0 (al1 + al
3 < vl >) + al2 < u2
l >>0) + al4 < ul >>0< w3
l > +
1
2al
5(< u3l >>0< w2
l > + < ul >>0 (< w4l > + < w2
l > (< v2l > + < ξ2
l >)))),
97

∫
ξ2fdΘ =R∗
2ρ0 < ξ2 > +R∗
4ρ0(< ξ20 > (A1 + A2 < u0 > +A3 < v0 > +A4 < w0 >)+
1
2A5(< u2
0 >< ξ20 > + < ξ4
0 > + < ξ20 > (< v2
0 > + < w20 >)))+
R∗
1(ρr < 1r ><0< ξ2
l > +ρl < 1l >>0< ξ2l >)−
R∗
1τρr(< ξ2r > (< 1r ><0 (Ar
1 + Ar3 < vr > +Ar
4 < wr >) + Ar2 < ur ><0)+
1
2Ar
5(< u2r ><0< ξ2
r > + < 1r ><0 (< ξ4r > + < ξ2
r > (< v2r > + < w2
r >))))−
R∗
1τρl(< ξ2l > (< 1l >>0 (Al
1 + Al3 < vl > +Al
4 < wl >) + Al2 < ul >>0)+
1
2Al
5(< u2l >>0< ξ2
l > + < 1l >>0 (< ξ4l > + < ξ2
l > (< v2l > + < w2
l >))))+
R∗
3ρ0(< ξ20 > (< u0 ><0 (ar
1 + ar3 < v0 > +ar
4 < w0 >) + ar2 < u2
0 ><0)+
1
2ar
5(< u30 ><0< ξ2
0 > + < u0 ><0 (< ξ40 > + < ξ2
0 > (< v20 > + < w2
0 >))))+
R∗
3ρ0(< ξ20 > (< u0 >>0 (al
1 + al3 < v0 > +al
4 < w0 >) + al2 < u2
0 >>0)+
1
2al
5(< u30 >>0< ξ2
0 > + < u0 >>0 (< ξ40 > + < ξ2
0 > (< v20 > + < w2
0 >))))−
SR∗
1ρr(< ξ2
r > (< ur ><0 (ar1 + ar
3 < vr > +ar4 < wr >) + ar
2 < u2r ><0)+
1
2ar
5(< u3r ><0< ξ2
r > + < ur ><0 (< ξ4r > + < ξ2
r > (< v2r > + < w2
r >))))−
SR∗
1ρl(< ξ2
l > (< ul >>0 (al1 + al
3 < vl > +al4 < wl >) + al
2 < u2l >>0)+
1
2al
5(< u3l >>0< ξ2
l > + < ul >>0 (< ξ4l > + < ξ2
l > (< v2l > + < w2
l >)))).
98

Appendix F
The LUSSORSCA implicit method ofelsA
The following excursion concerning the LUSSORSCA method is based on the elsA manual [5].To increase the efficiency of the numerical solution of non-linear systems of equations, the elsA codeis equipped with implicit schemes. The LUSSORSCA scheme is built upon the linearization of thesenon-linear systems what results in the necessity to solve large linear systems for each iteration. Toincrease the computational speed, the linear systems are solved in an approximative way by certainsimplifications for the implicit operators. For the LUSSORSCA scheme, the implicit matrix
• is diagonalized per block
• is factorized (LU)
By diagonalizing the matrix, the blocks of the Jacobian matrices that appear in the implicit phaseare transformed into diagonal matrices.The following non-linear system with the matrix J as the differential of the system operators, canbe written as (
∆h
∆tI + J
)
∆W = −R, (F.1)
where R represents the explicit residual, ∆W is the increment of the solution, ∆t stands for thetime step and ∆h is the local space increment. Now the term
(∆h∆t I + J
)is divided into three parts,
the upper triangular part U, the diagonal part D and the lower triangular part L. The basic ideaof the LU approximation is to replace the exact system by the expression LD−1U:
(∆h
∆tI + J
)
≈ (LD−1U). (F.2)
The system of the mean Navier-Stokes equations in integral form can be expressed as follows for acell Ω:
∂
∂t(V (Ω)WΩ) = −
6∑
i=1
(Fn)P
i+ V (Ω)TΩ = −RΩ. (F.3)
99

The space dicretisation is included in the residual RΩ. With a first order implicit time discretisationEq. (F.3) has the form:
∆(V (Ω)WΩ)
∆t= −R
(n+1)Ω , (F.4)
and the hypothesis of a constant volume V (Ω) in time is made. The expression ∆WΩ is definedby:
∆WΩ = Wn+1Ω − Wn
Ω. (F.5)
Below, the residual R(n+1)Ω that depends on WΩ and WΩi from the neighbouring cells, is linearized
with respect to time:
R(n+1)Ω = Rn
Ω +∂RΩ
∂t∆t + O(∆t2)
≈ RnΩ +
∂RΩ
∂WΩ
∂WΩ
∂t∆t +
6∑
i=1
∂RΩ
∂WΩi
∂WΩi
∂t∆t (F.6)
≈ RnΩ +
∂RΩ
∂W∆WΩ +
6∑
i=1
∂RΩ
∂WΩi
∆WΩi .
Therefore, the operator J can be expressed as:
J =∂RΩ
∂W+
6∑
i=1
∂RΩ
∂WΩi
δΩΩi , (F.7)
with δΩΩi as translation operator on the indices of the increments ∆W going from an index Ω toan index Ωi.Now the system can be formulated in a linearized and un-factored form:
[V (Ω)
∆tI + J
]
∆WΩ = −RnΩ. (F.8)
The right-hand side of Eq. (F.8) is equal to the explicit residual. The left-hand side contains theimplicit operator that is composed of the approached differentials of the functions of RΩ. Thereforethe matrix J contains the differentials of the flux balances and the possible source terms.The following implicitation of the convective fluxes can be combined with several explicit phases.For the computation of R one can use a centred or an upwind flux.For the development of the implicit system a first order upwind flux is taken. Hence, the Jacobianmatrices of the convective flux are defined as:
A =∂Fx1
∂W, B =
∂Fx2
∂W, C =
∂Fx3
∂W. (F.9)
Furthermore the positive and negative parts of the approximation of A are noted as A+ and A−.Yet, they respectively contain only positive or negative eigenvalues.In the upwind implicit phase of the LUSSORSCA scheme the differential of the flux balance in thedirection x1 is approached by:
∆−
x1A+
Ω∆WΩ + ∆+x1
A−
Ω∆WΩ =
A+Ω+x1/2∆WΩ −A+
Ω−x1/2∆WΩ−x1+ A−
Ω+x1/2∆WΩ+x1−A−
Ω−x1/2∆WΩ. (F.10)
100

The approximate differentials of the flux balances for the x2 and the x3 direction can be obtainedin a similar way by replacing A and x1. Finally the following formulation for the equation of thescheme for Ω, including only the Jacobians of the inviscid terms, is found:
−A+Ω−x1/2∆WΩ−x1
+(
V (Ω)∆t I + A+
Ω+x1/2 −A−
Ω−x1/2
)
∆WΩ
+A−
Ω+x1/2∆WΩ+x1= −RΩ. (F.11)
The matrix D is the multiplier of ∆WΩ. It is defined with diagonal blocks and is written:
DΩ =
(V (Ω)
∆tI +
1
2(ρΩ+x1/2 + ρΩ−x1/2)
)
, (F.12)
ρ represents the convective spectral radius of A at the cell interface Ω ± x1/2.The off-diagonal terms A±∆WΩ±x1
are calculated by using the homogeneity properties of theupwind explicit flux
A±∆WΩ±x1≈ 1
2(∆F∓ ρΩ±x1/2∆WΩ±x1
). (F.13)
In order to stabilize the implicit scheme, a dissipation of order four is introduced. The details ofthe introduction of this artificial viscosity won’t be treated here.
101
Related Documents