IMAGE.PROCESSING TECHNIQUES ApPLIED TO ROAD PROBLEMS 8 By M. R. Wigan l (Reviewed by the Urban Transportation Division) ABs'mACT: Relevant areas of image-processing applications were reviewed. and several initial were carried out to assess the potential of applying digital imaging techniques to road problems. The areas chosen were: Road surface rating. measurement. and discrimination: calibrated sieve measurement; vehicle outline detection; and vehicle registration number recognitiol\. Practical selective video data-acquisition equipment was built and tested as a result of this investi- gation. Analysis of the characteristics of road and traffic applications showed that these and other steps need to be taken to reduce the quantity of unnecessary images being collected for analysis. Effective test results were obtained in most of these trial areas, and the conclusions arc that adaptive Laws masks show promise for defect classification. automatic detection of speed and shape classification is prac- tical, sieve mensuration and calibration is a practical objective. vehiclc number recognition may require ancillary equipment, road surface defects could be ad- dressed directly. and discrimination of road surfaccs and their condition may be addressed. This paper includes a review of the various image processing methods available for invariant moment analysis and surfacc-tellture discrimination and clas- sification. and concludes that Laws masks are currently the preferred technique. INTRODUCTION The initial identification of profitable and practical use of noncontact sensors and digital image-processing techniques for road and traffic data acquisition has been under consideration by the writers for some time (Wi- gan 1983; Wigan and Cullinan 1984). Readers unfamiliar with the general area of image processing for roads may find these earlier reports a useful introduction. Subsequently, a project was set up by the Australian Road Research Board (ARRB) on applications for roads and traffic to select and test out a number of specifiC target areas. An extensive report of this project containing a considerably more detailed review of imaging techniques and the underpinning mathematics appears in Wigan and Cullinan (1987). One of the motivations for the work was that while the costs of the necessary equipment for encoding complete images could be seen to be declining rapidly even in 1983, the effective data reduction and problem- oriented work required to take advantage of these developments was not being advanced at a similar rate in road and transport engineering_ The lead time for such investigations is such that by the time inexpensive equipment is immediately available, the ability, understanding. and analysis techniques ·Sections based on "Image Processing Applied to Roads: Surface Texture. Men- suration. Vehicle Shape and Number Detection." ARR 145. by M. R. Wigan and M. C. Cullinan (1987). IHead. Dept. of Computing and Quantitative Methods. Victoria ColI.-Burwood Campus, 221 Burwood Hwy .• Burwood 3125, Victoria. Australia. Note. Discussion open until June 1. 1992. To extend the closing date one month. a written request must be filed with the ASCE Manager of Journals. The manuscript for this paper was submitted for review and possible publication on October 26. 1989. This paper is part of the Journal o/TronsponlJlion Engineering, Vol. US. No. I, J anuary/February. 1992. @ASCE. ISSN 0733-947X/92100() J-(KI62/$I.00 + $. 15 per page. Paper No. 26511. 62

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
IMAGE.PROCESSING TECHNIQUES ApPLIED TO ROAD PROBLEMS8
By M. R. Wiganl
(Reviewed by the Urban Transportation Division)
ABs'mACT: Relevant areas of image-processing applications were reviewed. and several initial investigation~ were carried out to assess the potential of applying digital imaging techniques to road problems. The areas chosen were: Road surface rating. measurement. and discrimination: calibrated sieve measurement; vehicle outline detection; and vehicle registration number recognitiol\. Practical selective video data-acquisition equipment was built and tested as a result of this investigation. Analysis of the characteristics of road and traffic applications showed that these and other steps need to be taken to reduce the quantity of unnecessary images being collected for analysis. Effective test results were obtained in most of these trial areas, and the conclusions arc that adaptive Laws masks show promise for defect classification. automatic detection of speed and shape classification is practical, sieve mensuration and calibration is a practical objective. vehiclc number recognition may require ancillary equipment, road surface defects could be addressed directly. and discrimination of road surfaccs and their condition may be addressed. This paper includes a review of the various image processing methods available for invariant moment analysis and surfacc-tellture discrimination and classification. and concludes that Laws masks are currently the preferred technique.
INTRODUCTION
The initial identification of profitable and practical use of noncontact sensors and digital image-processing techniques for road and traffic data acquisition has been under consideration by the writers for some time (Wigan 1983; Wigan and Cullinan 1984). Readers unfamiliar with the general area of image processing for roads may find these earlier reports a useful introduction. Subsequently, a project was set up by the Australian Road Research Board (ARRB) on image-processin~ applications for roads and traffic to select and test out a number of specifiC target areas. An extensive report of this project containing a considerably more detailed review of imaging techniques and the underpinning mathematics appears in Wigan and Cullinan (1987).
One of the motivations for the work was that while the costs of the necessary equipment for encoding complete images could be seen to be declining rapidly even in 1983, the effective data reduction and problemoriented work required to take advantage of these developments was not being advanced at a similar rate in road and transport engineering_ The lead time for such investigations is such that by the time inexpensive equipment is immediately available, the ability, understanding. and analysis techniques
·Sections based on "Image Processing Applied to Roads: Surface Texture. Mensuration. Vehicle Shape and Number Detection." ARR 145. by M. R. Wigan and M. C. Cullinan (1987).
IHead. Dept. of Computing and Quantitative Methods. Victoria ColI.-Burwood Campus, 221 Burwood Hwy .• Burwood 3125, Victoria. Australia.
Note. Discussion open until June 1. 1992. To extend the closing date one month. a written request must be filed with the ASCE Manager of Journals. The manuscript for this paper was submitted for review and possible publication on October 26. 1989. This paper is part of the Journal o/TronsponlJlion Engineering, Vol. US. No. I, J anuary/February. 1992. @ASCE. ISSN 0733-947X/92100() J-(KI62/$I.00 + $. 15 per page. Paper No. 26511.
62
to make efficient applied use of the results would not be available unless investigative and subsequently developmental work started promptly. This proved by 1988 to have been an entirely accurate reading of the situation. because since then there has been a steady stream of high-quality and evercheaper frame-grabber cards for IBM PCs, Apple Macintosh, and Sun workstations to underpin the current-and improving-practicality of implementing these methods economically.
Several selected feasibility-assessment areas are considered in turn. The major areas selected for this preliminary project were: (1) Road-surface features and defects (adaptive texture classification); (2) classification of vehicles (lateral profile); (3) speed measurements (line-scan camera); (4) number-plate recognition (moment methods of number recognition); and (5) areal mensuration (aggregate sieve calibration was the example). The closely related subject of pattern recognition per se is not addressed in this paper, but the reader should be aware that a wide range of the many applications now seen to be practical and possible will require the use of such techniques as neural networks.
ROAo-SURFACE TEXTURES AND DEFECTS
Road-surface visual rating is a standard tool for pavement management. Consistent ratings require considerable amounts of training and care in cross validation by experienced staff. The diagnostic value of such ratings over time and space depends on the associations that can be built up over time, relating ratings to vehicle and pavement performance. There are at least three different ways in which digital processing of pictures of road surfaces can be used to help in this task.
One approach is to compute an overall characteristic visual texture of the surface, which would be sensitive to cracks, patching, and other surface defects but would not measure each as a specific goal. These ratings could then be added to subjective visual rating factors and over a period both could be jointly assessed for their value in terms of correlations between different manual raters, with the physical and perceptual texture values and with road performance over time.
A second approach is to use the technique specifically to automatically pick out the presence of cracks, patches, and other features of the surface and compute an index weighted by the frequency of each feature identified.
A third technique is to take small pictures of developing crack areas. and use digital image processing to automatically compute the total area and length of the cracks: an application of image processing already in use in manufacturing that does not answer the need for an additional tool for linking appearance to performance (because it simply replicates the manual task of physical measurement) and thus was not ,"cluded in this set of exploratory trials. Subsequent to the work reported here. Cox et al. (1986a) reported on highly sophisticated equipment designed to meet the explicit measurement goal and devoted much of a second paper (Cox et al. 1986b) to the problems of recombining the very detailed data extracted at so much effort into a simple index, thereby returning to the first approach by a long indirect route.
The present paper concentrates on a feasibility analysis of the first two of these options, because the third is a well-established robotic-vision and photogrammetric technique and could reasonably be delayed until the field application development program was initiated. However, a very small scale
63
test of this family of methods was a sieve mensuration test described later in this report.
The two primary chosen options required basic research investigations before a field development stage could be entertained. Benke (1986) and Newlands (1985) contributed to the work on texture analysis and number recognition when working as advanced students at Deakin University, Geelong, Australia, partially supported by this project.
Published research on the subject of texture discrimination, as applied to high-speed analysis of road-surface condition was reviewed in detail by Wigan and Cullinan (1987), and only a brief summary is given here. The advantages of adopting a philosophy based on the use of convolution masks for texture discrimination are described.
Convolution masks are matrices of weighting factors applied successively to each point (pixel) in the image. The matrix-weighted sum of the values of this and the values of the neighboring pixels then replaces the current value of the central pixel. These masks can carry out powerful transformations of an image. Convolution masks were applied to the following images: (1) Artificial structured textures; (2) artificial stochastic textures; (3) and natural textures e.g. road surfaces.
The masks were tested in the following ways as part of the project: (1) Differences in normalization, comparing two types of histogram modification; (2) differences between synthesized stochastic textures due to changes in the mean and variance of gray levels; and (3) differences in the resolution of the digitization. A basic familiarity with the terminology of digital image and signal processing is assumed at the level of an introductory text such as Castelman (1979).
Historically, the properties most often associated with texture are coarseness and directionality. Many analytic approaches are primarily oriented toward characterising these two properties. Over the years, the multiplicity of theories applied to the analysis of textures has coalesced into two schools of thought-the "statistical" approach and the "structural" approach.
Statistical models are quite general in application; structural models require placement rules and are normally applicable only when texture contains repetitive elements with fairly simple geometries. Consequently, structural approaches are more suitable for artificial and highly regular patterns than for the often more complex natural textures, which are subject to statistical variability. Laws (1980) notes that structural approaches have the fundamental weakness that texture elements must be located, classified, and studied before the texture itself is analyzed. This represents a severe computational burden. which is accentuated in the case of noisy. blurred. or stochastic textures.
Many natural textures, such as road surfaces, have no easily discernible structure and are more efficiently analyzed using a statistical approach. A problem common to all such analytic approaches is that texture primitives may be nested and can exist as microtextures within macrotextures. Scale is therefore important.
The primary applied goal for road-surface assessment is to classify the generalized textures presented by images of the road surface as a means of summarizing the visual character of the surface and its faults and virtues, and thereby to avoid the need to measure and identify every individual element and feature on the surface.
Image quality in texture analyses can be degraded due to the monotonic transformations used in forming the image. To avoid the complexity of image
64
restoration procedures, the investigator attempts to digitize the textures under controlled conditions. The image requires normalization to compensate for variations in brightness and contrast and this is often achieved by histogram standardization across the various intensity levels in the image. This may involve a transformation designed to yield a Gaussian distribution of gray levels with a fixed mean and variance, or, alternatively, the global equalization of the image histogram.
Contemporary research has shown that high classification accuracies are possible. albeit sometimes at great complexity and considerable computational expense. Such methods include planar random-walk techniques (Wechsler and Kidode 1980). fractal theory (Pentland 1984), gray-level cooccurrence matrices (Vickers and Modestino 1982). and a combination of cooccurrence and convolution (Ade 1981).
The challenge faced when addressing the problem of texture classification lies in producing measures that are both very fast and accurate. Comparisons between the many various analytical techniques are difficult. and the results may be confounded by extraneous conditions. The performance of a texture analyzer can be influenced by the following variables: (1) Imuge data base used; (2) instrument effects, i.e. differences in digitization; (3) resolution of data; (4) normalization and other preprocessing of the image; (5) number and type of features analyzed; (6) number of training samples used; and (7) classification scheme used.
The primary applied goal for road-surface assessment is to classify the generalized textures presented by images of the road surface as a means of summarizing the visual character of the surface and its faults and virtues, and thereby avoiding the need to measure and identify every individual element and feature on the surface. Convolution masks (Laws 1980) are local operators (i.e. convolution masks with coefficients summing to zero producing a zero response over areas of uniform brightness) (Duff 1983). Consequently, they are particularly suitable for segmenting scenes composed of many textures. Masks are matrices of weighting factors that are applied successively to each point (pixel) in the image. The matrix-weighted sum of the values of the values of these and neighboring pixels then replaces the current value of the central pixel. Such masks are a mathematical representation of feature extractors used by the human visual system (Laws 1980; Julesz and Bergen 1983; Brady 1982; Hubel and Wiesel 1962; Barlow 1969). Gagalowicz (1980) and Wermser and Liedke (1982) support the use of local convolution operators that are suitable for simulating human perceptions of texture. A pattern-classification system will produce results that are consistent with human judgment if it operates in a similar manner.
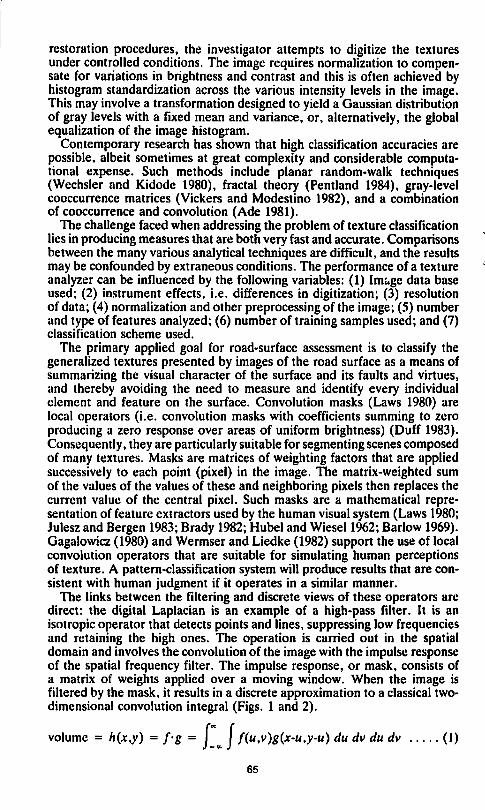
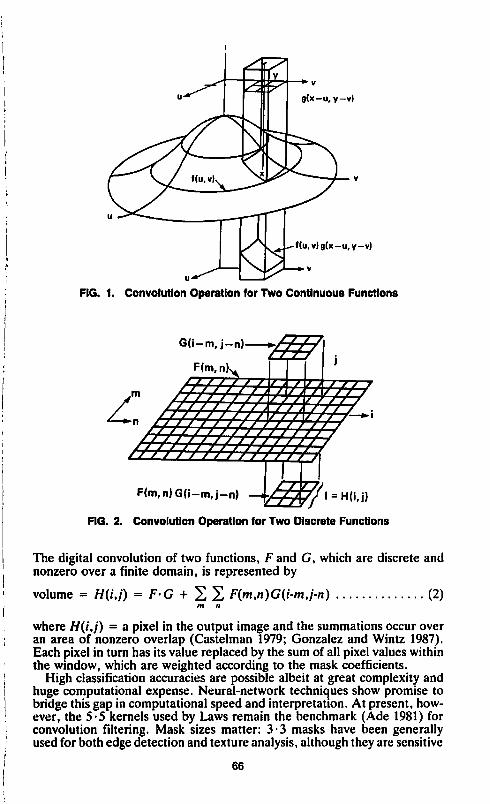
The links between the filtering and discrete views of these operators are direct: the digital Laplacian is an example of a high-pass filter. It is an isotropic operator that detects points and lines, suppressing low frequencies and retaining the high ones. The operation is carried out in the spatial domain and involves the convolution of the image with the impulse response of the spatial frequency filter. The impulse response, or mask, consists of a matrix of weights applied over a moving window. When the image is filtered by the mask, it results in a discrete approximation to a classical twodimensional convolution integral (Figs. 1 and 2).
volume = h(x,y) = f'g = f~ f f(u,v)g(x-u,y-u) du dv du dv ..... (I)
65
g(x-u.v-v!
u
FIG. 1. Convolution Operation for Two Continuous Functions
G(i-m. j-n)-~g91
L , F(m,n~
", L" ,
LL'
F(m, n) G(i-m,j-n)
, , , , . " ,-1 , , "" 7
" '1
L
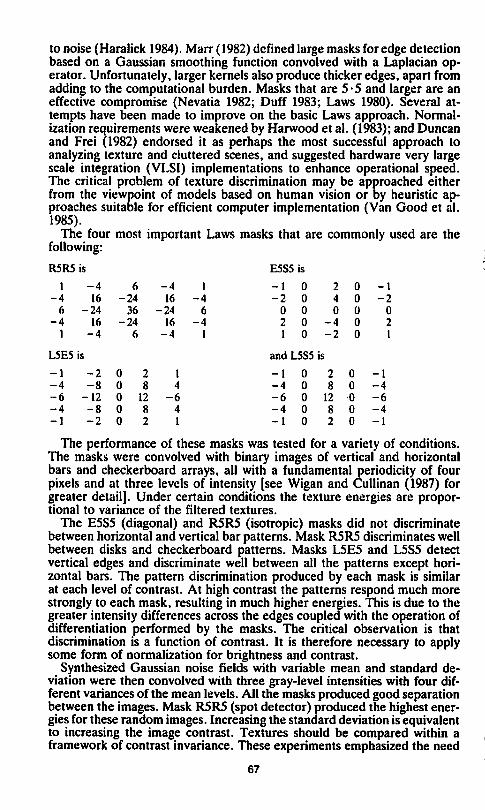
FIG. 2. Convolution Operation for Two Discrete Functions
The digital convolution of two functions, F and G, which are discrete and nonzero over a finite domain, is represented by
volume = H(i,j) = F· G + L L F(m,n)G(i-m,j-n) .............. (2) m n
where H(i,j) = a pixel in the output image and the summations occur over an area of nonzero overlap (Castelman 1979; Gonzalez and Wintz 1987). Each pixel in turn has its value replaced by the sum of all pixel values within the window, which are weighted according to the mask coefficients.
High classification accuracies are possible albeit at great complexity and huge computational expense. Neural-network techniques show promise to bridge this gap in computational speed and interpretation. At present, however, the 5·5 kernels used by Laws remain the benchmark (Ade 1981) for convolution filtering. Mask sizes matter: 3·3 masks have been generally used for both edge detection and texture analysis. although they are sensitive
66
to noise (Haralick 1984). Marr (1982) defined large masks for edge detection based on a Gaussiar. smoothing function convolved with a Laplacian operator. Unfortunately, larger kernels also produce thicker edges, apart from adding to the computational burden. Masks that are 5·5 and larger are an effective compromise (Nevatia 1982; Duff 1983; Laws 1980). Several attempts have been made to improve on the basic Laws approach. Normalization requirements were weakened by Harwood et a!. (1983); and Duncan and Frei (1982) endorsed it as perhaps the most successful approach to analyzing texture and cluttered scenes, and suggested hardware very large scale integration (VLSI) implementations to enhance operational speed. The critical problem of texture discrimination may be approached either from the viewpoint of models based on human vision or by heuristic approaches suitable for efficient computer implementation (Van Good et al. 1985).
The four most important Laws masks that are commonly used are the following:
RSRS is ESS5 is
1 -4 6 -4 1 -1 0 2 0 -1 -4 16 -24 16 -4 -2 0 4 0 -2
6 -24 36 -24 6 0 0 0 0 0 -4 16 -24 16 -4 2 0 -4 0 2
1 -4 6 -4 1 1 0 -2 0 I
LSE5 is and L5S5 is
-1 -2 0 2 I -I 0 2 0 -1 -4 -8 0 8 4 -4 0 8 0 -4 -6 -12 0 12 -6 -6 0 12 0 -6 -4 -8 0 8 4 -4 0 8 0 -4 -I -2 0 2 1 -1 0 2 0 -1
The performance of these masks was tested for a variety of conditions. The masks were convolved with binary images of vertical and horizontal bars and checkerboard arrays, all with a fundamental periodicity of four pixels and at three levels of intensity [see Wigan and Cullinan (1987) for greater detail]. Under certain conditions the texture energies are proportional to variance of the filtered textures.
The ESSS (diagonal) and RSRS (isotropic) masks did not discriminate between horizontal and vertical bar patterns. Mask RSRS discriminates well between disks and checkerboard patterns. Masks LSES and LSSS detect vertical edges and discriminate well between all the patterns except horizontal bars. The pattern discrimination produced by each mask is similar at each level of contrast. At high contrast the patterns respond much more strongly to each mask, resulting in much higher energies. This is due to the greater intensity differences across the edges coupled with the operation of differentiation performed by the masks. The critical observation is that discrimination is a function of contrast. It is therefore necessary to apply some form of normalization for brightness and contrast.
Synthesized Gaussian noise fields with variable mean and standard deviation were then convolved with three gray-level intensities with four different variances of the mean levels. All the masks produced good separation between the images. Mask RSRS (spot detector) produced the highest energies for these random images. Increasing the standard deviation is equivalent to increasing the image contrast. Textures should be compared within a framework of contrast invariance. These experiments emphasized the need
67
for a universal method of normalization. A common method for the normalization of an image by standardizing the brightness histogram.
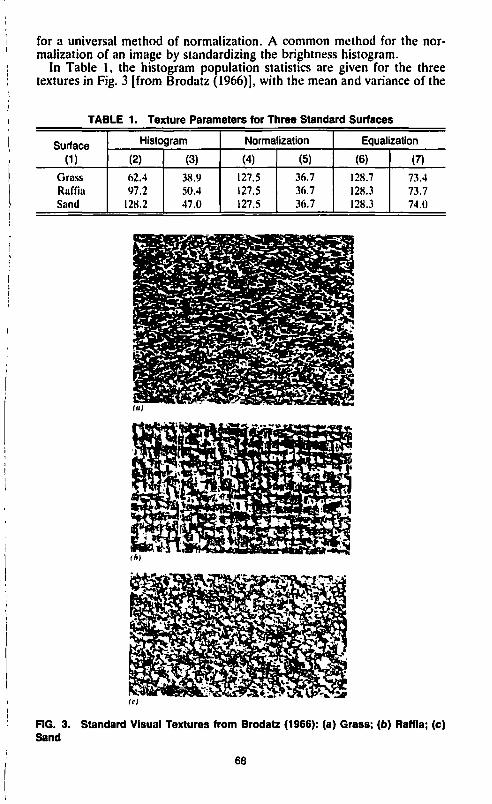
In Table 1. the histogram population statistics are given for the three textures in Fig. 3 [from Brodatz (1966)], with the mean and variance of the
TABLE 1. Texture Parameters for Three Standard Surfaces
Surface Histogram Normalization Equalization
(1 ) (2) (3) (4) (5) (6) (7)
Grass 62.4 38.9 127.5 36.7 128.7 73.4 Raffia 97.2 50.4 127.5 36.7 128.3 73.7 Sand 1211.2 47.0 127.5 36.7 128.3 74.0
FIG. 3. Standard Visual Textures from Brodatz (1966): (8) Grass; (b) Raffia; (c) Sand
68
gray levels for two types of normalization. The first forces a specified mean and standard deviation on the image and is useful for psychophysical experiments. The second is a histogram equalization (Ahlers and Alexander 1985). In this case, each pixel in the image is subjected to the following transformation:
g(q) = ~f h(P) dp ........................................ (3)
where g(q) = new value; h(p) = old value; M = number of gray levels; and!{l = number of pixels in a square image of size N· N. Overall contrast is enhanced for most of the image pixels, resulting in greatly improved visibility. Masks were convolved with homogeneous samples of grass, raffia, and sand. The results for the two methods of normalization are given in Tables 2 and 3. The texture energies are much higher for histogram equalization. The level of discrimination is good for both types of normalization.
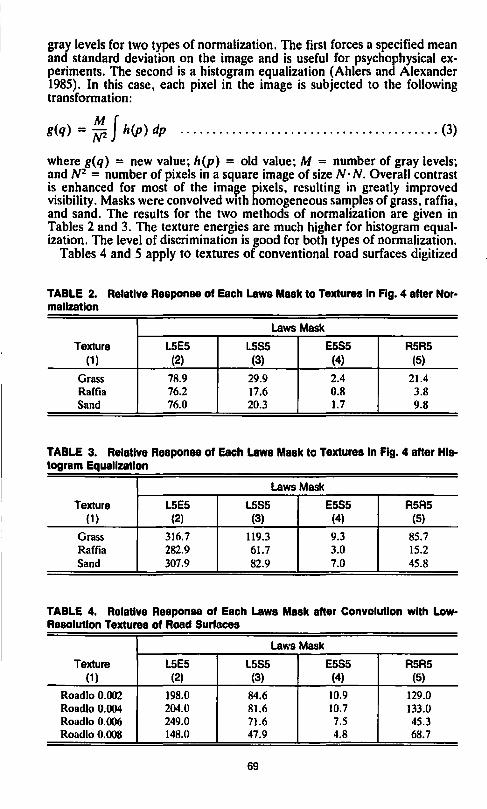
Tables 4 and 5 apply to textures of conventional road surfaces digitized
TABLE 2. Relative Response of Each Laws Mask to Textures In Flg. 4 after Normalization
Laws Mask
Texture L5E5 L5S5 E5S5 R5R5 (1) (2) (3) (4) (5)
Grass 78.9 29.9 2.4 21.4 Raffia 76.2 17.6 0.8 3.8 Sand 76.0 20.3 1.7 9.8
TABLE 3. Relative Response of Each Laws Mask to Textures In Fig. 4 after HIstogram Equalization
Laws Mask
Texture L5E5 L5S5 E5S5 R5R5 (1 ) (2) (3) (4) (5)
Grass 316.7 119.3 9.3 85.7 Raffia 282.9 61.7 3.0 15.2 Sand 307.9 82.9 7.0 45.8
TABLE 4. Relative Response of Each Laws Mask after Convolution with LowResolution Textures of Road Surfaces
La\\'S Mask
Texture L5E5 L5S5 E5S5 R5R5 (1 ) (2) (3) (4) (5)
Roadlo 0.002 198.0 84.6 10.9 129.0 Roadlo 0.004 204.0 81.6 10.7 133.0 Roadlo 0.006 249.0 71.6 7.5 45.3 Roadlo 0.008 148.0 47.9 4.8 68.7
69
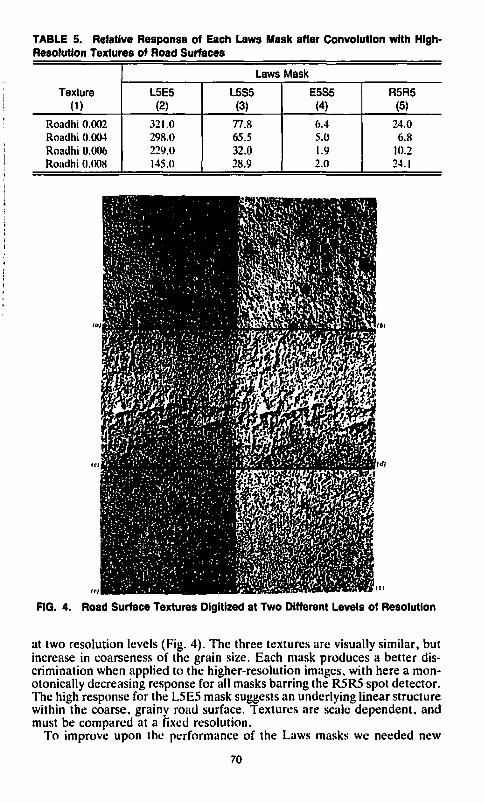
TABLE S. Relative Response of Each Laws Mask after Convolution with HighResolution Textures of Road Surfaces
Laws Mask
Texture L5E5 L5S5 E5S5 R5R5 (1 ) (2) (3) (4) (5)
Roadhi 0.002 321.0 77.8 6.4 24.0 Roadhi 0.004 29&.0 65.5 5.0 6.& Roadhi 0.006 229.0 32.0 1.9 10.2 Roadhi 0.00& 145.0 28.9 2.0 24.1
FIG. 4. Road Surface Textures Digitized at Two Different Levels of Resolution
at two resolution levels (Fig. 4). The three textures arc visually similar, but increase in coarseness of the grain size. Each mask produces a better discrimination when applied to the higher-resolution images, with here a monotonically decreasing response for all masks barring the R5R5 spot detector. The high response for the L5E5 mask suggests an underlying linear structure within the coarse. grainy road surface. Textures are scale dependent. and must be compared at a fixed resolution.
To improve upon the performance of the Laws masks we needed new
70
masks with different (noninteger) coefficients-unlike most published models. Mask coefficients with absolute integer values as high as 100 increase the degree of conformity with local pattern primitives without the additional computing expense of real arithmetic. A plausible approach to the problem of texture classification is to filter the image with a number of primitive masks that are feature selective.
The texture classification problem reduces to searching for symmetrical and antisymmetrical zero-sum convolution masks with integer coefficients in the range of - 100 to 100. For as· 5 kernel. the feasible region contains more than 102) possible masks. The task is to define optimal masks subject to specified performance criteria. This means discarding traditional masks with fixed coefficients and replacing them with convolution masks containing variables as coefficients. The proposed method involves mask optimization and can be interpreted as solving a problem in nonlinear mathematical programming. In particular. it is possible to generate a single convolution mask that is capable of producing high texture classification accuracies when tested on well-known natural textures.
The speed resulting from using only one mask is not compromised by inaccuracy or unreliability. because the mask is adaptive and accommodates for new circumstances. Prior training enables it to compensate for textures with new features and for the effects of digitization. The procedure for generating an adaptive mask is flexible in that any figure of merit may be used for optimization. In addition. the mask itself can be varied in size and operates as a feature extractor that can be trained on any arbitrary set of input patterns.
The utility of an adaptive mask is demonstrated in the following example. In Fig. 4, three different road surfaces are illustrated, before [Fig. 4(a,b)] and after [Fig. 4(e.f)] normalization. Histogram equalization has resulted in a noticeable increase in contrast. The image in Fig. 4(c.d) was digitized as a 164·200 array. and was further divided into four quadrants, QI-Q4.
Quadrant Q I featured the defect, a crack pattern; quadrant Q4 consisted of relatively uniform area of road surface and was used as the background. The background Q4 was further divided into four quadrants Q4a-Q4d. These subimages arc now only 41 ·50 arrays. A mask was optimized to detect the background by training it on sample Q4a
-43 -72 -87 -72 -43 -37 -61 -83 -61 -37 -7 -16 -2 -16 -2 36 68 74 68 36 44 87 100 87 44
The convolution of this mask with the Q4a pattern yields a response that is a function of the variance of the filtered image. The value was found to be E = 0.192. This was repeated for a second morphologically similar background sample. Q4c.
The result for sample Q4c was e = 0.207. which shows good agreement, especially in view of the very small sample sizes. We also convolved the mask with the other two background samples, Q4b and Q4d. which were taken from the right-hand side of the Q4 image. These samples were more uniform because they were more distant from the crack and were not subject to disruptions arising from the transition (edge effects). The results of Q4b and Q4d are 0.152 and 0.153, respectively. This is an excellent level of agreement.
71
The pooled average of the four samples of 04 was e = 0.176. compared with a value of - 0.286 when the mask was applied to the crack pattern in quadrant 01. The response ratio is 1.63. which is a significant level of discrimination. These results indicate that the mask is capable of providing reproducible results on the background samples, and can clearly discriminate between the crack pattern and the background. The second part of the experiment involved the derivation of a mask to produce maximum discrimination between the crack pattern in Oland the background road surface in 04, producing
-40 81
-100 34
-38
10 -21
33 -31
17
38 -75
82 -62
27
10 -21
33 -31
17
-40 81
-toO 84
-38
This mask produced a response of 0.0147 for sample 01 versus 0.0327 for sample 04 for a response ratio of 2.22, which represents significantly better discrimination than for the last mask. The twofold increase in the response of 04 relative to 01 greatly reduces the probability of misclassiCication. It is evident that even with the small image sizes used here. adaptive masks provide a very useful analytic approach for the identification and quantification of defects.
For pavement-crack-Iength determination it became apparent that the filter response is sensitive to the amount of cracking within the trial region. This has not yet been pursued. Further work requires a precise quantitative specification of crack length and (in morphological terms) of an algorithm to compute it.
Cox et al. (l986a.b) have subsequently concentrated on finding and implementing specialized operators to discriminate particular features of interest, such as crack sizes and orientations. This approach leaves unanswered the question of how to combine the numerate results for each individual feature to make an index. a problem shared by Haas et al. (1985). Cox et al. used a generalized scoring vector. initially set up for the published weightings from the Nevada pavement management scoring system for this purpose. It is worth asking the question: How do the texture values from a direct adaptive mask system (such as the one described) relate to these overall scores? Perhaps the painful (and computationally intensive) process of measuring each individual component and then combining the values obtained before using them is no more effective-and it certainly takes longer to do.
The basic question is to find an overall score that correlates well with judgments on the road condition and the bases used by people to decide what to do about it. This area is probably not sufficiently well investigated to justify the massive computational efforts of Cox et al. (1986a.b). and needs addressing. Pattern-matching representations and recognition techniques-such as back-propagation (McClelland and Rumelhart 1988)-capable of undertaking most of the necessary intensive computation prior to the data-acquisition process are definitely desirable.
The approach described is eminently well suited to a VLSI implementation of image convolution with a 5·5 mask. A texture approach to road surface and damage characterization of road-surface defects can be carried out at the full video frame rate of 30 frames/sec. using road images of a resolution
72
and covera$e determined by lens aperture. image size, and the image-capture limitatIOns of the camera.
A review of the recent analytic aspects of imaging research was carried out, discussing advantages and disadvantages of a number of important approaches to texture classification and the motivation and rationale for developing a practical approach to texture classification. The theme of texture discrimination based on the use of convolution masks was developed, with comparisons to the Laws approach.
Convolution masks have a number of fundamental advantages over other methods of texture classification. They are faster and more accurate texture analyzers than Fourier techniques or cooccurrence matrices. Convolution masks are a mathematical representation of feature extractors used by the human visual system. A pattern-classification system will produce results that are consistent with human judgment if it operates in a similar manner. This can be an important consideration in applications involving the automation of human visual inspection. The masks are local operators, and because of this they are particularly suitable for segmentation of a scene composed of many textures.
A number of experiments were carried out with different convolution masks applied to both test patterns and road surfaces. The results confirm the need for normalization with respect to brightness and contrast. Textures should also be compared at a fixed scale. Although transformations for scale invariance are possible, there is the risk of losing the texture attributes known as coarseness. A number of experiments were carried out with convolution masks applied to test patterns and road surfaces. The results confirm the need for normalization with respect to brightness and contrast.
Textures should also be compared at a fixed scale. Although transformations for scale invariance are possible, there is the risk of losing the texture attributes known as coarseness. The results of these texts demonstrate the need for new and improved masks in order to increase classification accuracy. Improved masks may also lead to a decrease in the total number of masks required, resulting in operational speed. This has narrowed down the search for these unknown masks by defining a number of appropriate constraints.
The present work introduces the idea of replacing fixed convolution masks with masks containing variables as coefficients. The task faced is to develop a formal procedure for generating such convolution masks. These programmable masks are called adaptive masks and could be generated to produce optimal performance with respect to texture recognition or texture discrimination. The applications include the assessment of surface inhomogeneity as well as defect classification.
It is suggested that direct use of texture ratings via adaptive masks be made in conjunction with manual ratings and diagnoses to determine if the intermediate stage of detailed computation of the surface elements is entirely necessary.
Since this exploratory work was completed in 1987, the commercial availability of practical dedicated neural-network engines inside IBM PCs has emerged (from de Anza, SAIC, and AI Ware amongst others), and the task defined matches the capacities of such systems very well. Neural-network systems are still of restricted capacity, but have already proved to be very effective (and extremely fast) in image-recognition applications. The training task is also better managed than in most other image-reduction techniques. It would therefore be well worth carrying out a further inves-
73
tigation using of neural-network systems to the tasks of road-surface-feature identification, classification, and characterization.
The direct links between road-surface features and remedial or diagnostic actions will require the integration of any feature- or surface-rating system into a decision-making tool at some point, and it is this stage that now justifies closer attention. Neural-network methods have much to offer in this area although the fundamental problems of speed and training (addressed here by adaptive mask generation) still leave much to be desired.
CLASSIFlCAnON OF VEHICLES IN MonON
The selective collection of data is essential when using image-processing and video-data-acquisition methods (Wigan 1986). The sheer quantity of information obtained in a short time when using videotape can take several orders of magnitude longer to reduce to frames of special interest, and the parameters of these frames still have to be measured or recorded. The reduction of the quantity of data required to arrive at the frames of interest was discussed elsewhere (Wigan 1986).
Once such a (multistage) selection process has been applied, it then becomes a practical proposition to use digital image-processing techniques to automate the extraction of appropriate values from the images on the frame (which can easily contain over 1()6 bytes of raw pixel data). An even greater degree of selectivity can be obtained in the field, such that appropriate sets of values are extracted requiring only the order of 10-100 bytes to be recorded with the rest discarded.
Using a line-scan array camera, the vehicle automatically detects itself, and by its movement clocks itself across the picture. The speed and shape discrimination can be extracted directly from the result. The feasibility studies of this project took this work to the stage of automatic construction of pictures from a vehicle passing a line array camera. This investigation is also si~nificant for road-surface-texture analysis, because the speed and resolutIOn limitations of the frame-acquisition rate of the camera provides a physical limit (dep'ending also on the lenses used and the size of the area of road chosen to fill the camera frame).
In the first part of this experiment, a line-scan array was situated laterally with respect to vehicle path, and perpendicular to the vertical plane containing the line of vehicle motion. As the vehicle passed the scan array data acquisition was initiated for each of the next 512 ms. The 512·1 strip image formed by the array camera was transmitted to an Arlunya TF5000 model temporal filter fitted with a slow-scan converter, where it was stored in successive rows of the image store. In this wayan image of a moving vehicle was built up one line at a time. The line array camera output "grabbed" each millisecond simply because the actual task for which the system was constructed requires millisecond intervals between successive grabs. (One line per millisecond is also the fastest rate at which the temporal filter slowscan converter accepted input data.)
Several model vehicles were successively rolled down a plane incline at a low angle. The line-scan array was set up at the side of this plane and at right angles to it, the angle of the plane having been selected to give a reasonable image, given that the clocking rate in the apparatus was not variable.
Illumination consisted of a small flOodlight positioned so that the moving vehicle passed between it and the image sensor. Fig. 5 shows a truck model
74
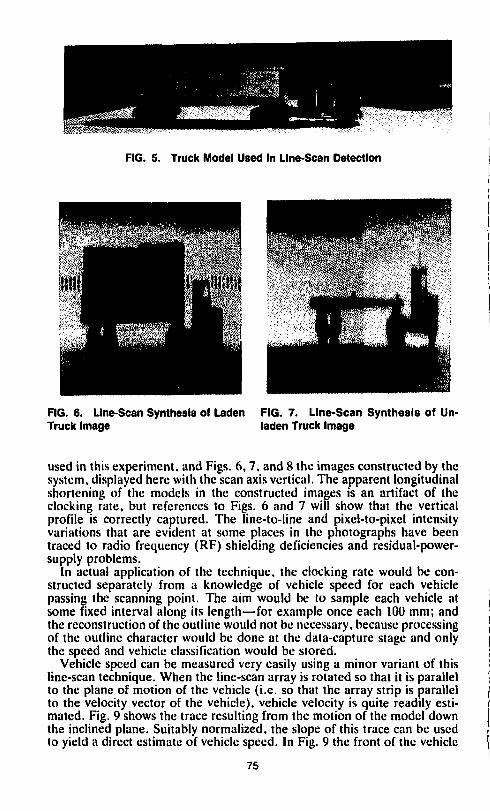
FIG. 5. Truck Model Used In LIne-Scan Detection
FIG. 6. Line-Scan Synthesis of Laden Truck Image
FIG. 7. Line-Scan Synthesis of Unladen Truck Image
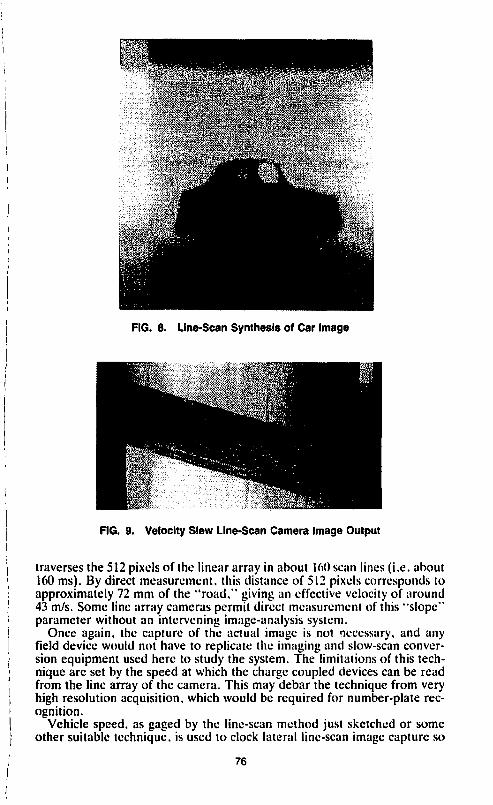
used in this experiment. and Figs. 6. 7. and 8 the images constructed by the system. displayed here with the scan axis vertical. The apparent longitudinal shortening of the models in the constructed images is an artifact of the clocking rate. but references to Figs. 6 and 7 will show that the vertical profile is correctly captured. The line-to-line and pixel-to-pixel intensity variations that are evident at some places in the photographs have been traced to radio frequency (RF) shielding deficiencies and residual-powersupply problems.
In actual application of the technique. the clocking rate would be constructed separately from a knowledge of vehicle speed for each vehicle passing the scanning point. The aim would be to sample each vehicle at some fixed interval along its length-for example once each 100 mm; and the reconstruction of the outline would not be necessary. because processing of the outline character would be done at the data-capture stage and only the speed and vehicle classification would be stored.
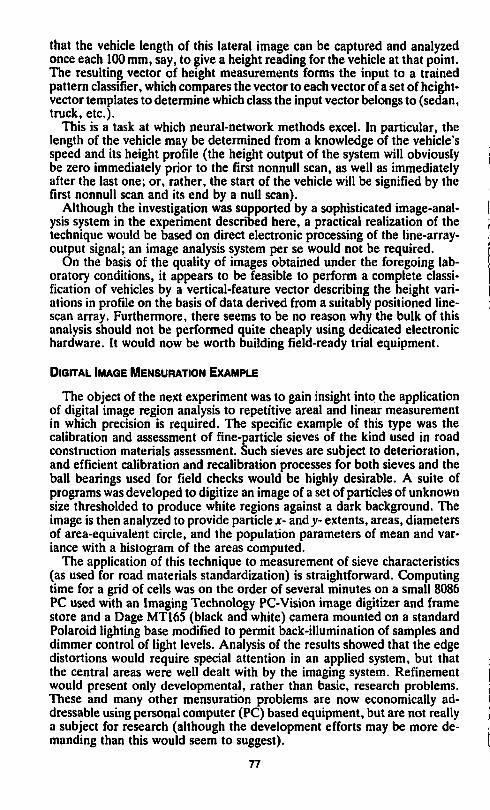
Vehicle speed can be measured very easily using a minor variant of this line-scan technique. When the line-scan array is rotated so that it is parallel to the plane of motion of the vehicle (i.e. so that the array strip is parallel to the velocity vector of the vehicle). vehicle velocity is quite readily estimated. Fig. 9 shows the trace resulting from the motion of the model down the inclined plane. Suitably normalized. the slope of this trace can be used to yield a direct estimate of vehicle speed. In Fig. 9 the front of the vehicle
75
I I I I
I I I
\ , I
I 1
FIG. 8. Line-Scan Synthesis of Car Image
FIG. 9. Velocity Slew Line-Scan Camera Image Output
traverses the 512 pixels of the linear array in about InO scan lines (i.e. about 160 ms). By direct measurement. this distance of 512 pixels corresponds to approximately 72 mOl of the "road." giving an effective velocity of around 43 m/s. Some line array cameras permit direct measurement of this "slope" parameter without an intervening image-analysis system.
Once again. the capture of the actual image is not necessary. and any field device would not have to replicate the imaging and slow-scan conversion equipment used here to study the system. The limitations of this technique are set by the speed at which the charge coupled devices can be read from the line array of the camera. This may debar the technique from very high resolution acquisition. which would be required for number-plate recognition.
Vehicle speed. as gaged by the line-scan method just sketched or some other suitable technique. is used to clock lateral line-scan image capture so
76
that the vehicle length of this lateral image can be captured and analyzed once each 100 mm, say, to give a height reading for the vehicle at that point. The resulting vector of height measurements forms the input to a trained pattern classifier, which compares the vector to each vector of a set of heightvector templates to determine which class the input vector belongs to (sedan, truck, etc.).
This is a task at which neural-network methods excel. In particular, the length of the vehicle may be determined from a knowledge of the vehicle's speed and its height profile (the height output of the system will obviously be zero immediately prior to the first nonnull scan, as well as immediately after the last one; or, rather, the start of the vehicle will be signified by the first nonnull scan and its end by a null scan).
Although the investigation was supported by a sophisticated image-analysis system in the experiment described here, a practical realization of the technique would be based on direct electronic processing of the line-arrayoutput signal; an image analysis system per se would not be required.
On the basis of the quality of images obtained under the foregoing laboratory conditions, it appears to be feasible to perform a complete classification of vehicles by a vertical-feature vector describing the height variations in profile on the basis of data derived from a suitably positioned linescan array. Furthermore, there seems to be no reason why the bulk of this analysis should not be performed quite cheaply using dedicated electronic hardware. It would now be worth building field-ready trial equipment.
DIGITAL IMAGE MENSURATION EXAMPLE
The object of the next experiment was to gain insight into the application of digital image region analysis to repetitive areal and linear measurement in which precision is required. The specific example of this type was the calibration and assessment of fine-particle sieves of the kind used in road construction materials assessment. Such sieves are subject to deterioration, and efficient calibration and recalibration processes for both sieves and the ball bearings used for field checks would be highly desirable. A suite of programs was developed to digitize an image of a set of particles of unknown size thresholded to produce white regions against a dark background. The image is then analyzed to provide particle x- and y- extents, areas, diameters of area-equivalent circle, and the population parameters of mean and variance with a histogram of the areas computed.
The application of this technique to measurement of sieve characteristics (as used for road materials standardization) is straightforward. Computing time for a grid of cells was on the order of several minutes on a small 8086 PC used with an Imaging Technology PC-Vision image digitizer and frame store and aDage MTl65 (black and white) camera mounted on a standard Polaroid lighting base modified to permit back-illumination of samples and dimmer control of light levels. Analysis of the results showed that the edge distortions would require special attention in an applied system, but that the central areas were well dealt with by the imaging system. Refinement would present only developmental, rather than basic. research problems. These and many other mensuration problems are now economically addressable using personal computer (PC) based equipment, but are not really a subject for research (although the development efforts may be more demanding than this would seem to suggest).
n
AUTOMATED DETERMINATION OF MOTOR VEHICLE REGISTRATION NUMBERS
Work on selective acquisition of vehicle data has been considered elsewhere (Wigan 1986) but the last stage of a highly selective data-acquisition system is to actively identify the particular vehicle. While such methods as passive (and active) transponders (electronic number plates) are coming into use, they are unlikely to be available for data collection on all vehicles for a considerable time. An alternative approach is to capture and interpret the registration markings on the vehicle. Several countries have started developing commercial equipment. Computer Recognition Systems. in the U.K .• developed a specialized neural-net-based hardware platform that when connected to a data base of stolen vehicles proved to recognize up to 50% of number plates via infrared cameras (Dickinson and Waterfall 1986).
It was therefore sensible to limit our investigative research to the minimum to enable such techniques to be properly evaluated and applied and reserve available effort for the task of evaluating equipment when it becomes available for purchase. Australian work at CSIRO (Commonwealth Scientific and Industrial Research Organisation) has been directed specifically toward real-time digitization and multiple-moment generation; and toward direct fast Fourier transform generation using a special-purpose chip. The relevant investigation in the traffic and transport domain was therefore to work on the requirements for number recognition using a restricted number of generated moments (Newlands 1985). The ancillary problem of locating numbers on an image is different. on which published experience already exists.
The recognition of visual patterns by computer is subject to a number of constraints that are difficult to satisfy simultaneously. The recognition method should not be disabled by translation, rotation, or change in size of the image (Hu 1962). In addition, between-class discrimination features should be insensitive to within-class variations and vice versa (Abu-Mostafa and Psaltis 1985). Traditional approaches include property lists and statistical (template) matching. Moment invariants developed by Hu (1962) are indeed insensitive to variations in size, position. and orientation. The method uses two-dimensional invariants derived from moments that are themselves derived from the intensity distribution of the image.
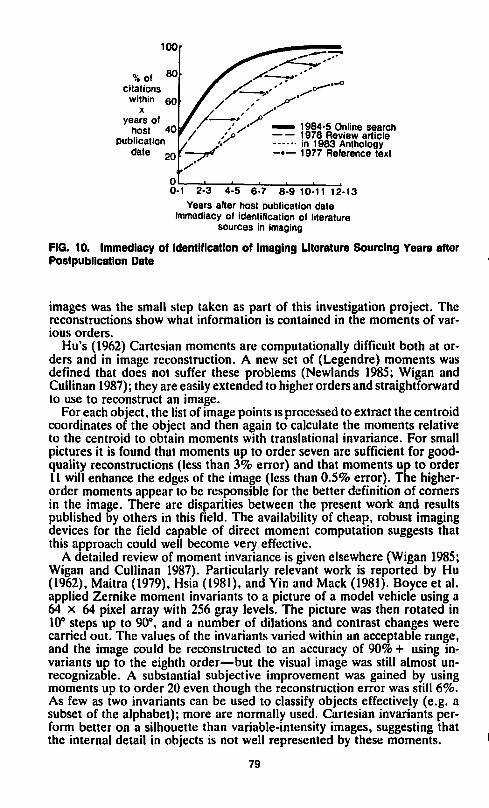
Investigating the moment-invariant literature was useful both for this imaging work and the characteristics of the information-retrieval results themselves (Wigan 1985a). One might expect that most of the references in this fast moving area would be very recent. This was the case only for online searches of a specialist data base. The most useful review literature and textbooks were of a far earlier vintage. Fig. 10 shows the age profiles of references found in three different types of resource. This should encourage those seeking information on new subjects to include searches of much earlier material, especially when a clear view of the fundamentals is needed. For example, in the case of shape recognition by moment invariants the seminal paper is Hu (1962).
An infinite series of these moment invariants exists for any image corresponding to the infinite amount of detail in the image. All of the information in a digitized picture can be captured in a series of moment invariants of finite length. Even as few as two members of this series can sometimes be sufficient to discriminate between images. This approach to numberplate-character recognition is likely to offer effective field-data reduction. and far less computation effort than template-matching approaches. The reconstruction of alphanumeric images from a subset of the moments of the
78
100
% of 80 citations
within 60 x
years of host 40
publication date 20
-~",.
// ", /-' /,,' .-0 /-,.' ,/~
/ ,'/""
/- " /' -, ."P " /' - 1984·5 Online search
/ ,/' - - 1978 Review article " ...... in 1983 Anthology ~ -0- 1977 Reference text /'
g.':-'---::2:-'.3=-~4:-'--5=--~6"':-7~8"""-""9-''''''0'''''--'1--'1 2-13
Years aller host publication date Immediacy of identification of literature
sources in imaging
FIG. 10. Immediacy of Identification of Imaging Literature Sourcing Year. after Postpubllcatlon Date
images was the small step taken as part of this investigation project. The reconstructions show what information is contained in the moments of various orders.
Hu's (1962) Cartesian moments are computationally difficult both at orders and in image reconstruction. A new set of (Legendre) moments was defined that does not suffer these problems (Newlands 1985; Wigan and Cullinan 1987); they are easily extended to higher orders and straightforward to use to reconstruct an image.
For each object. the list of image points is processed to extract the centroid coordinates of the object and then again to calculate the moments relative to the centroid to obtain moments with translational invariance. For small pictures it is found that moments up to order seven are sufficient for goodquality reconstructions (less than 3% error) and that moments up to order 11 will enhance the edges of the image (less than 0.5% error). The higherorder moments appear to be responsible for the better definition of corners in the image. There arc disparities between the present work and results published by others in this field. The availability of cheap, robust imaging devices for the field capable of direct moment computation suggests that this approach could well become very effective.
A detailed review of moment invariance is given elsewhere (Wigan 1985; Wigan and Cullinan 1987). Particularly relevant work is reported by Hu (1962). Maitra (1979). Hsia (1981). and Yin and Mack (1981). Boyce et al. applied Zernike moment invariants to a picture of a model vehicle using a 64 x 64 pixel array with 256 gray levels. The picture was then rotated in 10° steps up to 90". and a number of dilations and contrast changes were carried out. The values of the invariants varied within an acceptable range. and the image could be reconstructed to an accuracy of 90% + using invariants up to the eighth order-but the visual image was still almost unrecognizable. A substantial subjective improvement was gained by using moments up to order 20 even though the reconstruction error was still 6%. As few as two invariants can be used to classify Objects effectively (e.g. a subset of the alphabet); more are normally used. Cartesian invariants perform better on a silhouette than variable-intensity images, suggesting that the internal detail in objects is not well represented by these moments.
79
Teague (1980) reconstructed the letters E and F using a 21 x 21 pixel array. Newlands (1985) revised the basis of these functions to use Legendre polynomials, which are both orthogonal and simple to calculate. The results were used to assess the data compression and discrimination available using this moment-invariant method. A recursive specification can be based on the following equations:
Po(x) = 1 .................................................. (4)
Pl(x) = x .................................................. (5)
(n + I)Pn + l(x) = (2n + 1) x Pn(x) - nPn - l(x) ........... (6)
Cartesian (Clm ) and Legendre (Lm ,,) moments have a simple relationship
(1) m " Lm " = -4 (2m + 1)(2n + 1) L L CjkMjk •••••••••••••••••••• (7) j~O k~O
The reconstruction of images from these orthogonal Legendre moments is done by summation on a finite diagonal terminated at an (arbitrary) maximum value of Nmox •
N~ N
Ix)' = L L L"_NP,,_,A,x)P,,Y ............................... (8) Ngil "gO
The good behavior of the Legendre polynomials as Nmox ~"' is in contrast to the Cartesian series, and provides a direct summation instead of an algebraic solution of coupled equations. The reconstructed image intensity is continuous, and so thresholding is required to recover the original twolevel image.
The results of applying these methods was to show that moments up to seven are highly effective in reconstructing the images, in good agreement with previous work [e.g. Hsia (1981)J on Cartesian moments. However, a marked deterioration in accuracy was found with the addition of high-order moments (20 + ). The extension to images of other types is not certain, given the experience of Boyce et al. (Hsia 1981) with Zernike polynomials to order 20.
The limited work reported here on moment-invariant applications provides the basis for a reasonable alternative to template-matching techniques, but confirms that limiting computation to order-seven moments are an effective means of discriminating and reconstructing binary intensity-level images of alphanumeric characters.
SELECT10N OF FULL DEVELOPMENTAL ApPUCATlONS
This paper summarizes some of the scope of practical application areas for digital image analysis in road and traffic research, and demonstrates that at least the first stage of such applications is now both practical and economical.
The importance of such applications is rising as the cost of equipment drops and the cost of staff effort rises. Imaging applications are also becoming of practical importance in other areas of road research, such as visual discrimination. Gallagher and Lerner (1983) describe U.S. work in this area, using regionalization and successive simplification as a means of determining a measure of the visual complexity of a scene. This is one of
80
the pattern-recognition applications referred to in the introduction as being in the next phase of applications work on this line of applied research.
The two major initial applied-research targets should be road-surface ratings and defects, including the basic correlation studies proposed between visual ratings, texture ratings. and diagnostic ratings by individuals; and vehicle classification. Automated sieve calibration, crack-size measurement, and other linear areal and measurement tasks are now simply developmental tasks; the example reported suffices to demonstrate the techniques available.
Road-surface rating and defect classification is recommended as the best choice for further work. with vehicle classification methods as the second priority. The close associations with video data logging. pavement management systems. expert-systems decision support. and consistency checks on surface ratings have been addressed elsewhere (Wigan 1985b). and are the basis for the choice of surface rating as the preferred next project. especially as visual rating correlations are an independently valuable and timely resource that should be obtained in parallel.
The equipment required to do this is now simply that required for general imaging-processing work. Interested bodies can now confidently obtain at least the basic in-house equipment for capturing. processing. and re-presenting imaging materials and know that they can be used effectively for imaging applications. A wide range of microsystem options were already available in 1985. from the most primitive digitilcr to a full-scale automatic motion-analysis system relying totally on video inputs. Currently this type of equipment is now well matched to desktop processing power. Advanced tool kits for image-processing developments and neural networks are readily available from a number of vendors for all the tasks addressed in this paper.
It is now probably appropriate for interested bodies to obtain at least the basic in-house equipment for capturing, processing and re-presenting imaging materials. The cost of such equipment has fallen by a factor of 20 and more since this investigative project was initiated, and the power has increased: improvements in the readiness and ability of the road engineering community have not kept pace to be ready to exploit the productivity and technical gains now available.
ACKNOWLEDGMENTS
The work reported here drew from a number of different projects pursued under this joint program. Those at Deakin were under the supervision of Michael Cullinan. The discussion of road-surface textures and defects was drawn from material developed toward a Ph.D. thesis to be submitted by Kurt Benke. The application of moments to number recognition was drawn from a B.Sc.lhonors thesis by Douglas Newlands. The sieve mensuration results were derived using proprietary programs written by Imaging Application Pty Ltd. and equipment from a wide range of sources including the writer and Deakin and Melbourne Universities. Subsequent to the specification defined here. the selective video trigger system was built by John Dods at ARRB.
REFERENCES
Ade. F. (19111). "Characterization of textures by eigenfilters." Sigllal Proce.uilfg. 5. 451.
Abu-Mostafa. Y. S .• and Psaltis. D. (19114). "Image normalization by complex mo-
81
mcnts." IEEE Tram. Patte", Allalysis alld Machille IfllelligcIICI? PAMI-7(1/. -1<1-55.
Ahlers. K. D .. and Alexander. D. R. (1985). "Microcomputer based digital image processing system developed to count and size laser generated small particle images." Optical Engrg .• 24(6). 1060-1065.
Barlow. H. B. (1969). "Pattern Recognition and the responses of sensory neurons." Anll. N. Y. Acad. Sci .• 156. 822-881.
Benke. K. K. (1986). "The analysis of visual texture." thesis. presented to Deakin University. at Geelong. Australia. in partial fulfillment of the requirements for the degree of Doctor of Philosophy.
Brady. M. (1982). "Computational Approaches to Image Understanding." Compo Surl' .• 14(1). 3-71.
Brodatz. F. (1966). Textures: A photographic album for arlisls alld desigllers. Dover. New York. N.Y.
Cas.1sent. D .• and Psaltis. D. (1979). "Optical pattern recognition using invariant moments." Soc. of Photo-Opticallnstrum. Engineers. (201).107-114.
Castleman. K. R. (1979). Digital image processing. Prentice Hall. Englewood-Cliffs. N.J.
Cox. G .• Curphey. D .. Fronek. D .• and Wilson, J. (19860). "Remote sensing of highway pavements at road speeds: Using the Motorola 68020 Microprocessor." MkrocompUlers ill Cil'. EIIgrg .• 1(1). 1-13.
Cox. G .. Merrill. R. c.. and Fronek. D. (19H6b). "Pavement management system with realtime microprocessor-based computation." Microcomplllers in Cil'. ElIgrg .. 1(2). 95-105.
Dickinson. K. W .• and Waterfall. R. C. (1984). "Image processing applied to traffic. I: General review." Traffic Engrg. COlllrol. (1). 6-13.
Durf, M. J. B. (1983). Neighborhood operators in biological processes of images. E. J. Braddick and A. C. Sleigh. eds .• Springer-Verlag, Herlin. Germany.
Duncan, J. S .• and Frei. W. (1982). "Very large scale integration (VLSI) approach to feature extraction." SPIE Applications of Digital Image Processing. (4). 359. 378-385.
Gagalowicz. A. (1980). "Visual discrimination of stochastic texture fields based upon their second order statistics." Proc., 5,h Int. Con/. Pal/ern Recognition. Institute of Electrical and Electronics Engineers, New York, N.Y .. 786-788.
Gallagher. V. P .. and Lerner. N. (1983). "A model of visual complexity of highway scenes." Report FHWAIRD-831083. U.S. Dept. of Transportation. Washington. D.C.
Gonzalez. R. C .• and Wintz, P. (1987). Digital image prot·essillg. 2nd cd .• AddisonWesley. Reading. Mass.
Haas, L.. Shen. H., Phang. W. A .• and Haas. R. (1985). "Application of image analysis technology to automation of pavement condition surveys. Transportation towards the year 2000." Proc., Int. Transp. Congress RTAC. Ottawa. Canada. (5)C57-C72.
Haralick. R. M. (1984). "Digital step edges from zero crossings of second directional derivatives." IEEE Trans. Pallen! Analysis and Maehille Intelligellce. PAMI-6. 58-68.
Harwood. D .• Subbarao. M .. and Davis. L. S. (1983). "Texture classification by local rank order correlation." TR-J314. Computer Vision Laboratory. Center for Automation Research. University of Maryland. Baltimore. Md.
Hu, M.-K. (1962). "Visual pattern recognition by invariant moments." IRE TrailS. on Info. Theory, 8(Feb.). 179-187.
Hubel, P. H .• and Wiesel. T. N. (1962). "Receptive fields. binocular interaction and functional architecture in the cats visual cortex." Physiology. London, England. (160). 106-154.
Hsia. T. C. (1981). "A note on invariant moments in image processing." IEEE Trans. on Systems Man and Cybernetics SMC-lI. (12). H71-H74.
Laws. K. I. (1980). "Textured image segmentation." Tech. Report 940. Image Processing Institute, University of Southern California, Los Angeles. Calif.
Maitra. S. (1979). "Moment Invariants," Proc., IEEE, 67(4). 697-699.
82
Marr, D. (1982). Vision. W. H. Freeman and Co., San Francisco, Calif. McClelland, J. L., and Rumelhart, D. E. (1988). Explorations in parallel distributed
processing. MIT Press, Cambridge, Mass. Newlands, D. A. (1985). "Image reconstruction from moment series," thesis pre
sented to Deakin University, Geelong, Australia, in partial fulfillment of the requirements for the degree of Bachelor of Science.
Pentland, A. P. (1984). "Fractal-based description of natural scenes." IEEE Trans. Pattern Analysis and Machine Intelligence, PAMI-6,661-674.
Teague, M. R. (1980). "Image analysis via the general theory of moments." J. Optical Soc. America, 70(8), 920-30.
Triendl. E. E. (1972). "Automatic terrain mapping by texture recognition." Proc., 8th Int. Symp. on Remote Sensing of Environment. Environmental Research Institute of Michigan, Ann Arbor, Mich.
Van Gool, L., Dewaele, P .• and Oosterlinck, A. (1985). "Texture analysis Anno 1983." Complller Vision, Graphics and Image Praces.fing. (29), 336-357.
Vickers, A. L., and Modestino. J. W. (1982). "A maximum-likelihood approach to texture classification." IEEE Trans. Pallern Analysis and Machine Intelligence PAMI-4, 1,61-68.
Wechlser, H .• and Kidode, M., (1980). "A random walk procedure for texture discrimination." IEEE Trans. Pattern Analysis and Machine Intelligence PAMI-] , 3.272-280.
Wermser. D .• and Liedtke, C. E. (1982). "Texture analysis using a model of the visual system," Proc., 6tl. Int. Conf. on Pattern Recognition. Munich. Germany. 1078-1080.
Wigan. M. R. (1983). "Information technology and transport: Research proposals." Technical Note TN 126. Institute for Transport Studies, University of Leeds, England.
Wigan, M. R. (1985a). Image processing for roads: An on-line literature review and text data base assessment. Awtralian Road Res., Melbourne. Australia, 15(1), 50-55.
Wigan, M. R. (1985b). "The potential for computer based data logging and interpretation." Proc., Pavement Mana~ement Systems Workshop, Australian Road Research Board, Vermont, Australia. 65-71.
Wigan, M. R. (1986). "Selective road and traffic data acquisition (SDA) for roads and traffic and video capture control," Internal Report AIR 413-3, Australian Road Research Board, Vermont, Australia.
Wigan, M. R .• and Cullinan, M. C. (1984). "Machine vision for road research: New tasks and old problems," Proc., 12th ARRB Conf., Vermont, Australia, 12(4), 76-86.
Wigan. M. R., and Cullinan, M. C. (1986). "Digital image processing: An applications review for road research applications." Proc., 2nd AUSGRAPH Conf., Australian Computer Graphics Association, Melbourne, Australia, 57-60.
Wigan. M. R., and Cullinan. M. C. (1987). "Image processing applied to roads: Surface texture. mensuration, vehicle shape and number detection." Res, Report ARR 145, Australian Road Research Board, Vermont, Australia.
Yin, B. H .• and Mack, H. (1981). "Target classification algorithms for video and forward looking improved (FLlR) imaging." Soc. Photo-Optical Instrument Engineers, (302), 134-140.
83
Related Documents











