1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering TN Ab dev wh tou psy dem can fro thi acc At 28. has dev han art sof ind pal wit par han the tha the pos are I han Ma sup of Nat J Dep D Gra Y Eng M T NSRE-2014-00 bstract—To to velopment, wel ho have lost th uching become ychosocial issu monstrate that n be perceived om a human h is goal. First, we cording to their room tempera .4°C at the skin s a Shore duro veloped a proce nd. To compa tificial hands, a ftness map by r dentation force lmar side of th th skeletal stru rticipants’ arm nds, but they em. Receiver o at a warm and e touch is fro ssibilities for pr e more socially Index Terms— nd illusion. HE human h bones, musc anuscript received pported in part by Engineering, Qata tional University o JJ Cabibihan is partment, Qatar Un D Joshi is with t aphic Era Universi YM Srinivasa and gineering Departm MA Chan is with I John- T 0086 ouch and be ll-being, and r heir arms and es a serious ues and socia the touch from by another per and. We descr e made particip r preferred war ature, the pref n surface of a s ometer value of ess to create a are the skin s a robotic inden recording the d of 1 N was ap he hand. Result ucture is as sof ms were touch were prevented perating chara soft artificial m a human h rosthetic and ro acceptable. Prosthetics, bio I. INTRO hand has a co cles, tendons, l April 2, 2014; acc the Research and ar University and of Singapore. s with the Mec niversity, Qatar (e the Electrical and ity, India. d A Muruganantha ment, National Univ GE Global Resear Illusor Wa -John Cabibih IEEE, touched are relationships. H hands due to concern that al stigma. In m a warm and rson as if the to ribe a three-ste pants select arti rmth and softne ferred warmth soft silicone rub f 30 at the OO rubber hand re oftness of a h nter was emplo displacement da pplied to 780 d ts showed that ft as a human hed with hum d to see the h acteristic curve hand can creat hand. These f obotic hands th omimetics, artif ODUCTION omplex anatom ligaments, arte cepted August 25, Graduate Studies d the Academic R chanical and In email: john.cabibih d Electronics Eng am are with the Ele versity of Singapo rch, Germany. ry Sen arm a han, Senior M Mark Aaron vital to hum However, to th accident or w t often leads this paper, soft rubber ha ouch were com ep process towa ficial skin samp ess characterist was found to bber material t scale. Second, eplica of a hum human hand a oyed to produc ata when const data points on an artificial ha hand. Lastly, man and artific hand that touch analysis sugge te an illusion t findings open hat are lifelike a ficial skin, rubb my consisting eries, nerves, a 2014. This work Office of the Coll Research Fund of dustrial Engineer h[email protected]). ineering Departm ectrical and Comp ore, Singapore nse of H and So Member, IEEE Chan, and Ar man hose war, to we and ming ard ples tics. be that we man and ce a tant the and the cial hed ests that the and ber of and was lege the ring ment, uter Fig. 1. A ligaments the prot form th outermo the ext layers b dermis, sweat g is also tactile s palm an side of t The characte stiffens various seconds enough enough and pai fear, d commun characte features fingers Huma oft Art E, Deepak Josh rrchana Muru Anatomy of the s, muscles, artery, tective layer o he innermost st ost protective l ternal world [ broadly classif and the hypo glands, and the densely pack sensing [4]. A nd the digits to the hand. skin tissue eristics: it ea when the con shapes of obj s; it is tough to provide a to soothe som ins. Through t disgust, love unicated to o eristics, it is s for prostheti due to an accid an Tou tificial hi, Yeshwin M uganantham, M human hand. D and nerves at the v of the skin [1, tructure of the layer and acts [3]. It is com fied as the str odermis. Apart blood vessels ked with recep layer of subcu o create a cush of the hum asily deforms ntact force beco jects, but retur against exter comforting to meone else’s ph touch, distinct , gratitude others [5]. G reasonable t ic devices for dent or war. uch fro l Hand Mysore Sriniv Member, IEE Depiction of the volar side of the ri , 2] (Figure 1) e hand. The sk as the primary mprised of sev ratum corneum from the papi , the volar side ptors to facilit utaneous fat pa hioning effect man hand h with slight omes large; it rns to its origi rnal elements, ouch to a baby hysical and emo t emotions suc and sympath Given these to mimic som those who lo om a d vasa, Member EE. 1 major tendons, ight hand. ). The bones kin forms the y interface to veral internal m, epidermis, illary ridges, e of the hand tate efficient ds lies in the on the volar as versatile contact and conforms to inal shape in yet is soft y; it is warm otional aches ch as anger, hy can be remarkable me of those ost hands or r,

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TN
AbdevwhtoupsydemcanfrothiaccAt 28.hasdevhanartsofindpalwitparhanthethatheposare
Ihan
Masupof
Nat JDep DGra YEng M
T
NSRE-2014-00
bstract—To tovelopment, wel
ho have lost thuching becomeychosocial issumonstrate that n be perceived om a human his goal. First, wecording to their
room tempera.4°C at the skins a Shore duroveloped a procend. To compatificial hands, aftness map by rdentation force lmar side of thth skeletal strurticipants’ armnds, but they em. Receiver oat a warm and e touch is frossibilities for pre more socially
Index Terms—nd illusion.
HE human hbones, musc
anuscript received pported in part by Engineering, Qata
tional University oJJ Cabibihan ispartment, Qatar UnD Joshi is with taphic Era UniversiYM Srinivasa andgineering DepartmMA Chan is with
I
John-
T
0086
ouch and be ll-being, and r
heir arms and es a serious ues and socia
the touch fromby another perand. We descre made participr preferred warature, the prefn surface of a someter value ofess to create a
are the skin sa robotic indenrecording the d
of 1 N was aphe hand. Resultucture is as sofms were touchwere preventedperating charasoft artificial
m a human hrosthetic and roacceptable.
Prosthetics, bio
I. INTRO
hand has a cocles, tendons, l
April 2, 2014; accthe Research and ar University and
of Singapore. s with the Mecniversity, Qatar (ethe Electrical andity, India. d A Murugananthament, National Univ
GE Global Resear
IllusorWa
-John CabibihIEEE,
touched are relationships. H
hands due to concern that
al stigma. In m a warm and rson as if the toribe a three-stepants select artirmth and softneferred warmth soft silicone rubf 30 at the OO rubber hand reoftness of a h
nter was emplodisplacement dapplied to 780 dts showed that ft as a human hed with humd to see the h
acteristic curvehand can creathand. These fobotic hands th
omimetics, artif
ODUCTION
omplex anatomligaments, arte
cepted August 25, Graduate Studies
d the Academic R
chanical and Inemail: john.cabibihd Electronics Eng
am are with the Eleversity of Singaporch, Germany.
ry Senarm a
han, Senior MMark Aaron
vital to humHowever, to th
accident or wt often leads
this paper, soft rubber ha
ouch were comep process towaficial skin sampess characterist
was found to bber material tscale. Second,
eplica of a humhuman hand aoyed to producata when constdata points on an artificial hahand. Lastly,
man and artifichand that touch
analysis suggete an illusion t
findings open hat are lifelike a
ficial skin, rubb
my consisting eries, nerves, a
2014. This work Office of the Coll
Research Fund of
dustrial [email protected]). ineering Departm
ectrical and Compore, Singapore
nse of Hand So
Member, IEEEChan, and Ar
man hose war,
to we
and ming
ard ples tics.
be that
we man and ce a tant the
and the cial hed ests that the
and
ber
of and
was lege
f the
ring
ment,
uter
Fig. 1. Aligaments
the protform thoutermothe extlayers bdermis, sweat gis also tactile spalm anside of t The charactestiffens various secondsenough enough and paifear, dcommuncharactefeaturesfingers
Humaoft Art
E, Deepak Joshrrchana Muru
Anatomy of the s, muscles, artery,
tective layer ohe innermost stost protective lternal world [broadly classif
and the hypoglands, and the
densely packsensing [4]. A nd the digits tothe hand.
skin tissue eristics: it eawhen the conshapes of obj
s; it is tough to provide a to soothe som
ins. Through tdisgust, love
unicated to oeristics, it is s for prosthetidue to an accid
an Toutificial
hi, Yeshwin Muganantham, M
human hand. Dand nerves at the v
of the skin [1,tructure of thelayer and acts [3]. It is comfied as the str
odermis. Apart blood vessels
ked with receplayer of subcuo create a cush
of the humasily deforms ntact force becojects, but retur
against extercomforting to
meone else’s phtouch, distinct, gratitude others [5]. G
reasonable tic devices for dent or war.
uch frol Hand
Mysore SrinivMember, IEE
Depiction of the volar side of the ri
, 2] (Figure 1)e hand. The skas the primary
mprised of sevratum corneum
from the papi, the volar sideptors to facilitutaneous fat pahioning effect
man hand hwith slight
omes large; it rns to its origirnal elements,
ouch to a babyhysical and emot emotions sucand sympathGiven these to mimic som
those who lo
om a d
vasa, MemberEE.
1
major tendons, ight hand.
). The bones kin forms the y interface to veral internal m, epidermis, illary ridges, e of the hand tate efficient ds lies in the on the volar
as versatile contact and conforms to
inal shape in yet is soft
y; it is warm otional aches ch as anger, hy can be
remarkable me of those ost hands or
r,

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TNSRE-2014-00086
2
To date, significant advances have been made in the recovery of the motor and sensory functions that were lost due to amputation. With a surgical technique called targeted muscle reinnervation, Kuiken et al [6] demonstrated that real-time control of multiple degree of freedom joints for prosthetic arms and hands can be achieved when the nerves from the residual arm are transferred to alternative muscles sites and electromyography signals are recorded by electrodes at the skin surface. Tactile feedback was found to be essential in order to control a prosthetic hand in an intuitive manner. Marasco et al [7] created an artificial sense of touch by coupling a pressure sensor on a prosthetic hand while feedback was achieved through a haptic interface (i.e. tactor), where proportional pressure is applied to stimulate the cutaneous nerves that were redirected to the skin of the residual limb. Self-reported and physiological measures from amputees suggest that a vivid sense of ownership of a prosthetic hand can be created by providing cutaneous tactile feedback. More recently, Raspapovic et al [8] demonstrated that an amputee's motor commands can be simultaneously decoded and sensory feedback can be delivered in real time for an amputee to bidirectionally control a prosthetic hand. From the contact information provided by the tactile sensors at the prosthetic hand, sensory information can be provided to the amputee by stimulating the median and ulnar nerve fascicles using implanted electrodes. For the first time, they showed that a blindfolded amputee can identify stiffness and shape of three different objects only from the tactile information provided by the prosthetic hand. Upper limb loss has been found to dramatically change a person's body image [9-11]. To this end, creating a sensation that a foreign object is a part of the body has been investigated in the so-called Rubber Hand Illusion [12]. This illusion is created by applying synchronized brush strokes to a rubber hand in full view of the participant and to the participant's own hand, which is hidden behind a screen or under a table. Since its discovery, several reports have confirmed that an illusion of touch has been felt by non-amputees [13-15] and amputees [7, 16] alike, with both experimental groups experiencing ownership of the rubber hand. It was explained that the illusion occurs due to the attempt of brain's perceptual systems to interpret visual, tactile, and proprioceptive information resulting into a re-calibration of the location of touch and the felt position of the hand with the result that the touch appears to be felt by the rubber hand [12, 16]. Furthermore, it has been reported that the experience of body ownership applies only to objects that have the same appearance of the body part [17]. It was demonstrated that participants experienced a sense of ownership only for a realistic prosthetic hand and not for a plain wooden block or even a wooden hand. The study suggests that the object being viewed by the participants must fit with a reference model of the body in order to maintain a coherent sense that the object can be a part of the body. Considerable advances have been achieved to make prosthetic hands and fingers indistinguishable from the missing body parts not only in terms of anatomical structure [18, 19] but also in the replication of skin tone, pores, and hair [20, 21].
In addition to functional and aesthetic considerations, Murray [22] argued that the usage of prosthesis plays a social role in the lives of amputees—prosthesis use can ward off social stigmatization. This finding was corroborated by Ritchie et al [23] where they found that a prosthesis can help upper limb amputees cope, to feel normal again, and “not to stand out”. Limb loss and prosthesis usage can alter a person's social life and the quality of social interactions [24-26]. All these findings are of particular importance as they provide evidence on the possibility of satisfying the functional, body image, aesthetic, and social requirements of those who lost a hand. What remains unknown, however, is whether an artificial hand would feel realistic to the person being touched. In the present article, we consider a scenario where the user of a prosthetic hand touches another person. We ask whether experimental participants could feel that the touch from an artificial hand with warm and soft characteristics feels like touch coming from a human hand. We describe a three-step process to investigate this. First, we present the selection process for warm and soft synthetic skins that participants preferred to have on an artificial hand. We then show how we included these features into a replica of a human hand. Finally, we describe an experiment wherein participants were touched with a human hand and artificial hands, but they were prevented from seeing the hand that touched them.
II. PERCEPTION EXPERIMENTS WITH ARTIFICIAL SKIN
SAMPLES
A. Participants
A total of 165 healthy subjects (95 males, 70 females, all 17-28 years old) were recruited from the National University of Singapore. Participation was voluntary.
B. Experimental design
To determine the desired thermal and mechanical characteristics of an artificial hand, we asked participants to touch various skin samples and select a sample that they felt similar to human skin tissue. Participants were free to choose their own exploration strategy. They were not limited on the time to make a decision. The skin samples were arranged to have a gradiation of soft and warm features and were laid out in a 4×4 array (Figure 2a). We designed each row to have a temperature gradient of 5°C at the sample’s surface (i.e. 22, 27, 32 and 37°C). We wanted to determine the temperatures because we do not know which temperature is preferred by the subjects for a lifelike prosthetic hand. This is especially important because the room temperature has an effect on the skin temperature of the participant’s hand [27]. For the columns, we selected 4 different materials of increasing softness. The details of the materials selected are provided in Table I. The lower Shore durometer value corresponds to a softer material. The materials were selected based on their usage in earlier works on prosthetic or robotic skins [28, 29], embedding materials for tactile sensors [30, 31] and for soft robotics [32, 33]. All the skin samples were fabricated using standard moulding techniques. They were identically colored to remove

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TN
anypigwitthe
Eco
Pro
Dra
Pol(PD
C.
Figtembaswitwitglumato samtemthebe
Fig4×4andarti
tem
EprotemimsystemtemaccTheman effUSvo
NSRE-2014-00
y visual bias. Tgment (Silc Pigth silicone paie pigment to ad
TABLE I
Material Name
oflex, OO-30
ochima, GLS 40
agon Skin, series 2
lydimethylsiloxaneDMS), Sylgard 184
Design of the
gure 2b showmperature sensse. The polyimth dimensions th maximum cued on extruaterial thermall
its low thermmples were gmperature wasermometer in fabout 50-60%
g. 2. Touch experim4 array with columd rows arranged aificial fingertip sk
mperature sensor m
Each sample oportional comperatures of
mplemented in stem was integmperature of tmperature senscuracy ±0.5°C
he sensor wamploying it on t
on-and-off mafect transistor (SA). A pull-ultages of the
0086
The samples wg, Smooth-On, nt base (Psych
dhere properly.
. DETAILS OF TH
Manufact
Smooth-On,
Prochima, It
20 Smooth-On,
e 4
Dow CorninUSA
e Embedded He
ws the assembsor at the surfamide heater (Kof 6.35×25.4×current rating
uded polystyrely insulated themal conductiv
given 3.9 W os maintained free air. The rel
%.
ments on artificiamns arranged accorccording to increakin sample consi
mounted on the skin
employed a ontroller in o
22, 27, 32 ana microcont
grated to it (Figthe fingertip ssor (LM335, N
C). The sensor as calibrated the circuit. Theanner using me(MOSFET; IRF
up resistor wae microcontro
were colored usUSA). The pig
ho Paint, Smoo.
HE MATERIALS
turer Shore ODurome
Numb, USA 30
taly 55
, USA 70
ng, 86
Heating
bly of a skinace and a heatinKapton heater×0.25 mm3, has
of 3 A. The ene foam (Se samples fromvity of 0.03 Wof power. That 21°C, as mlative humidity
l skin samples. (arding to materials asing warmth. (b) isting of an emb
n surface.
hybrid on-offorder to reand 37°C. The roller and a
gure 3a). The inamples were National Semiwas glued to to room tem
e heater was metal–oxide–semF630, Fairchild
as also used foller and the
sing a flesh-tongment was mixoth-On, USA)
S SELECTED OO eter
ber
MaterialDesignatio
A
B
C
D
n sample withng element at s, Minco, USAs 7.1 Ω resistan16 samples w
Styrofoam). Tm one another dW/m·K. All
he ambient romeasured withy was recorded
a) Samples laid ouin increasing softnCutaway view of
bedded heater an
ff scheme andach the desi
algorithms wdata acquisit
nitial skin surfameasured withconductor, USthe skin surfa
mperature befmade to operatemiconductor fied Semiconductfor matching e MOSFET.
ned xed for
on
h a the A), nce
were This due the om h a d to
ut in ness f an
nd a
d a red
were ion
face h a SA; ace. fore e in eld-tor, the A
microcointegratwere usamplesrepresenthermocwhich wdesign fingertip
Fig. 3. Alalgorithmtemperatuskin surfa
D. The
There wwhen thorder tothe fouanalyzemeasuredensity,data she
. Taspecific
ontroller (Atmeted developmensed to maintas to the desirentative readingcouple-based was attached towas then indp samples.
lgorithm for the emm used for controures of 22, 27, 32 aace temperatures re
ermal Characte
will be a chanhe human fingeo calculate thaur materials wer (TCi, C-Ted thermal co, ρ, of each maeets. Specific
able II gives c heat.
ega 2560, Atmnt board (Ardu
ain the tempered temperaturegs collected fmultimeter (U
o the surface ofdependently im
mbedded heating aolling the heatinand 37°C for eachesulting from the h
erization of the
nge in temperaertip touches that temperature,were required.
Therm Technoonductivity, katerial was obtheat, c, was tthe thermal c
mel, USA) couuino, Smart Prrature of the s. Shown in F
from the data U1252A, Agif each material
mplemented on
and representativeng system to reah of the material saheating system des
e Materials
ature at the conhe skin materia, the thermal p. A thermal ologies, Canak, and effusivained from thethen calculatedconductivity, d
3
upled with an rojects, Italy) 16 fingertip
Figure 3b are logger of a
ilent, USA), l. The circuit n all the 16
e results. (a) The ach the desired ample. (b) Initial sign.
ntact surface al sample. In properties of conductivity da) directly vity, e. The eir respective d as /density, and

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TN
A (
B (P
C (D
D (
E.
Thme20 30 thopartemtemthe(mthefortemsuc28andthe
F.
ThChsof32surwhpar= 327tem(Ecprepro heaUptraconchaandcalto
NSRE-2014-00
TABLE II. TH
Material C
Ecoflex)
Prochima)
Dragon Skin)
PDMS)
Initial Human
he initial skineasured as they
and 30 minutsubjects (15 m
ose who particrticipants weremperature was mperatures at te participant’s
model 62 Miermometer wasr all measuremmperature at thcceeding mean.4°C (SD = 1.d 30 minutes, e temperatures
Results
he participants hance for selecftness, 46% of% preferred mrface temperathile 31% selecrticipants’ pref36), material A°C temperatur
mperature resucoflex OO-30)eferred temperoportion of higThe majority’sat transfer propon contact, ansferred to tnduction. The anged dependid artificial filculated the su[34, 35]:
0086
HERMAL PROPE
Thermal Conductivity (k)
(W/m·K)
0.15
0.23
0.16
0.12
n Skin Temper
n temperaturey entered the etes after they emales, 15 femcipated in the e made to sit i
maintained atthe papillary w right hand uini, Fluke, Us maintained a
ments. Upon enhe fingertip wn temperatures9°C) and 27.8respectively. Fat the 10 minu
selected the cting a samplef the participamaterial B. Foture was selectcted the 32°Cferences clusteA with 32°C res (n = 28). ults to 28.4°) was the morature can be
ghly selected tes choice was ccess that occuthe heat fromthe surface osurface tempering on the initngertips and
urface temperat
ERTIES OF THE M
Density (ρ) (kg/m3)
1,065
1,123
1,081
1,040
ratures
es of the pexperiment rooentered. We ra
males, all 18-25skin sample en a relaxed pot 21°C. We mwhorl of the inusing an infraUSA; accuracat a constant dntrance to the
was 28.9°C (SDs were 29.0°C
8°C (SD = 1.8°For the subsequute mark were c
samples showe is 6.25% (1
ants preferred mor temperatureted by 45% o
C temperature.ered on materia(n = 26), andBy proportio
C. In summst preferred so
e set to 28.4°emperatures. consistent withurs when one tom the humanof the artificrature at the intial temperaturtheir thermal
ture of each m
MATERIALS
Specific Heat (c(J/kg·K)
1,558
1,244
1,435
1,610
participants wom, and after andomly selec5 years old) frexperiments. Tosition. The romeasured the s
ndex fingertipared thermomecy ±1°C). T
distance of 22 room, the meD = 2.2°C). TC (SD = 2.0°°C), after 10, uent calculatioconsidered.
wn in Figure out of 16). Fmaterial A whe, the 27°C sf the participa Notice that
al A with 27°Cd material B won, the preferary, material oft material. T°C based on
h the result of ouches a surfan fingertip wial fingertip
nterface of contres of the huml properties. W
material accord
c)
were 10,
cted om
The om kin of
eter The cm ean The C), 20,
ons,
4a. For hile kin
ants the
C (n with
red A
The the
the ace. was
by tact
man We ing
(1)
where the humtemperatemperaconductinitial t(§II.E). fingerpavalues fwere exvalid, tcriterionThe Fou
where characteby the thermal
/to be lethe usetemperaFor the in Figur28.3 an27°C, temperaof the pthe pro28.4°C
Fig. 4. PrThe selecclusteringtemperatutemperatuskin samp
is the resultman and artifature of the hature of the tivity, ρ is dentemperature of
The thermal cad was estimafor k, ρ, and cxperimentally the Fourier nun to be satisfieurier number is
contact time,eristic length, contact area,
l diffusivity o. The Four
ess than 2.1×10e of Eqn. (atures at the comost preferred
re 4a, the calcund 29.9°C for
and materialatures are also participants’ fioportioned tem(§II.F).
referred warm andcted material type ag at material A ure, and materialures at the contacples.
ting surface teficial fingertip
human fingertiartificial fing
nsity, and c is f the participancontact coefficated in [36] toc for each of obtained (Tabumber, , ofed to assume as
, t, was set , defined as
, was calculatof the materirier number fo0-4. The cri(1) is valid. ontact interfacd material andulated skin surmaterial A w
l A with 32closest to the
ingertips of 29mperature was
d soft skin characand initial surface with 27°C temp
l B with 27°C tct interface when
mperature upops, isip, igertip, k is specific heat. nts’ fingertips cient, , oo be 1,181 J/mthe artificial s
ble II). For Eqf less than 5a semi-infinite
to 5 secons material voluted to be 4×1ial, α, was cr each materiaiterion was sat
The calculace are shown id temperature cface temperatu
with 27°C, mat2°C, respectivaverage initial
9.0°C (§II.E). s earlier calcu
cteristics of the sktemperature of th
perature, material temperature. (b) the human finger
4
on contact of s the initial is the initial the thermal The average was 29.0°C
of the human m s½K. The skin material qn. (1) to be ×10-2 is the model [37].
(2)
nds and the ume divided 10-3 m. The alculated as
al was found tisfied. Thus, ated surface in Figure 4b. combinations ures are 28.4, terial B with vely. These l temperature Incidentally,
ulated to be
kin samples. (a) e artificial skins
A with 32°C The calculated
rtip touches the
1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TN
I
A.
Adatsili9 cbonto histhetheUn
B.
comfroperof hansubstruinvsub
Figsub3D mouthe prinhum
FtheTo
NSRE-2014-00
III. LIFELIKE A
Participant
A 35-year-oldta from his dicone rubber recm in breadth anes, and 19 cmthe tip of the m
s hand’s measue anthropometre indentation niversity of Sin
Experimental
Two designs ompare the soft
om silicone rrceptual correldeformation cnds were madbject’s right hucture while volved in fabrbject’s hand ar
g. 5. The fabricatibject’s hand. (b) CT
surface reconstruuld and the bonesmould. The liquid
nted model of theman subject’s hand
Figure 5a showe subject’s hanoshiba Medica
0086
ARTIFICIAL HA
AND EXP
d male subject dominant righteplica of a humas measured acm in length as middle finger. Turements wereric data in [38]experiment w
ngapore’s Instit
l Design
of artificial hantness of the hurubber. Here, late of skin coaused by an ap
de from the dand. The first the second onricating the syre shown in Fig
ion process to repT scan image show
uction of the humas to construct a syd silicone rubber i mould and the bd obtained after the
ws the Compund. A helical al Systems,
AND: DESIGN, CPERIMENT
participated it hand were uman hand. The cross the ends measured fromThe subject wae close to the . The experim
was approved tutional Review
nds were fabriuman hand to t
softness is ompliance, whipplied force [3data collected
one made usene did not. Tynthetic replicgure 5.
plicate a human hwing the bone andan hand. (d) The mynthetic hand. (e) is poured through ones. (g) The come silicone rubber h
uted TomograpCT scanner (Japan) used
CONSTRUCTION
in the study. Tused to createsubject’s hand
of the metacarm the wrist creas chosen becau50th percentileental protocol by the Natio
w Board.
icated in orderthe replicas ma
defined as ich is the amou9]. Both artificfrom the hume of the skelet
The various steca of the hum
hand. (a) The humd the skin contoursmodel of the two-Assembled modethe large hole. (f)
mpleted replica ofhas cured.
phy (CT) scan(AquilionTM
d the follow
N,
The e a d is rpal ase use
e of for
onal
r to ade the unt cial
man ton eps
man
man . (c) part
el of ) 3D f the
n of 64, ing
paramet500 ms were pImages,reconstrwere poBelgiumstereolitto desigthe bonprovisio5e). A USA) Geometthe bonresolutiand 160 The mas the smixed ainto theof 21°Chuman fabricathand wskeletonouter diskeletonartificiabones (N
C. Exp
The expin FiguSwedenrepeatabsensor resolutithe z ditip of 2robot’s the resuMateria
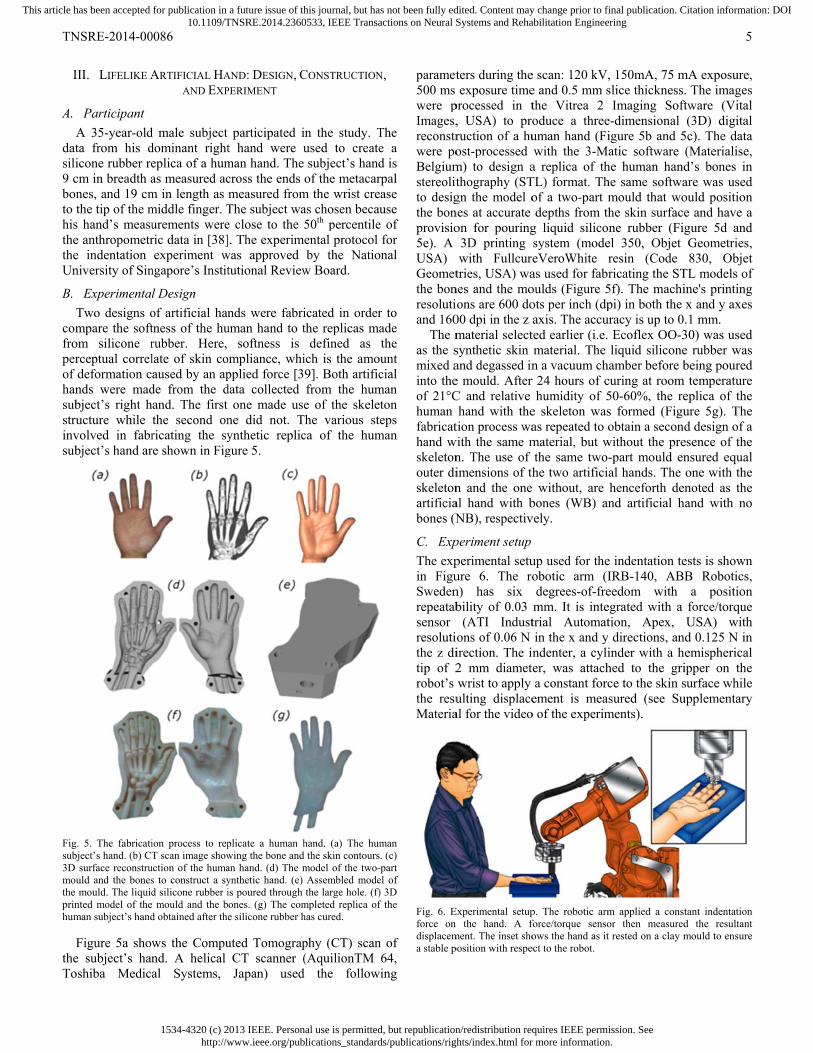
Fig. 6. Eforce on displacema stable p
ters during theexposure time
processed in t, USA) to proruction of a huost-processed m) to design athography (STgn the model ones at accurate on for pouring
3D printing with Fullcure
tries, USA) wanes and the moions are 600 do00 dpi in the z material selectsynthetic skin and degassed ine mould. After C and relative hand with the
tion process wawith the same m
n. The use of imensions of thn and the one al hand with bNB), respectiv
periment setup
perimental setuure 6. The ron) has six bility of 0.03
(ATI Industions of 0.06 N irection. The in2 mm diametwrist to apply ulting displaceal for the video
Experimental setupthe hand. A f
ment. The inset shoposition with respe
e scan: 120 kV,e and 0.5 mm sthe Vitrea 2 oduce a threeuman hand (Fiwith the 3-M
a replica of thTL) format. Thof a two-part mdepths from th
g liquid silicosystem (modeeVeroWhite ras used for fabroulds (Figure 5ots per inch (dpaxis. The accuted earlier (i.e. material. The n a vacuum chr 24 hours of c
humidity of 5e skeleton wasas repeated to omaterial, but wthe same two-he two artifici without, are
bones (WB) anvely.
up used for theobotic arm (Idegrees-of-fremm. It is intetrial Automatin the x and yndenter, a cylier, was attacha constant forc
ement is meao of the experim
p. The robotic armforce/torque sensoows the hand as it
ect to the robot.
, 150mA, 75 mslice thickness.Imaging Soft
e-dimensional igure 5b and 5atic software
he human handhe same softwamould that wohe skin surfacene rubber (Fig
el 350, Objet resin (Code ricating the ST
5f). The machipi) in both the
uracy is up to 0 Ecoflex OO-3liquid silicone
hamber before bcuring at room 50-60%, the res formed (Figuobtain a second
without the pre-part mould enal hands. The henceforth dennd artificial h
e indentation teIRB-140, ABBeedom with egrated with a tion, Apex,
y directions, aninder with a hhed to the grice to the skin ssured (see Su
ments).
m applied a constor then measuredt rested on a clay m
5
mA exposure, . The images
ftware (Vital (3D) digital
5c). The data (Materialise, d’s bones in are was used ould position e and have a gure 5d and Geometries, 830, Objet
TL models of ine's printing x and y axes .1 mm. 30) was used e rubber was being poured temperature
eplica of the ure 5g). The d design of a
esence of the nsured equal one with the noted as the
hand with no
ests is shown B Robotics, a position force/torque USA) with d 0.125 N in emispherical ipper on the surface while upplementary
tant indentation d the resultant mould to ensure

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TN
poon ordregusePQthedef
Figandwer
D.
A tABdonrobinddefgrithetesto divwatesand disx
whdisdisdef
E.
StaIBM
NSRE-2014-00
The hand beinsition (Fig. 6 predefined re
der to compagions are displed to identify
QRS. We used e hand, like thfine the bound
g.7. Standardized td artificial hands. re programmed to
Software Des
top-level flowcBB robot contrne using the Rbot system. Todenter was manfined in Figurid of test pointe index, middlst region into atheir shorter l
vided into a 25as divided intost points were d were sufficieThe final skinsplacement eq, , in thr
here d is tsplacement sesplacement (i.formation prod
Data process
atistical analysM Corp., USA
0086
ng tested in theinset). The indgions of the ha
are the humanayed in Figure
the test bounthe natural la
he papillary waries.
testing areas for iPoints ABCD anthe robotic arm
sign
chart of the soroller is shownRAPID progra
o record the refnually jogged tre 7. The robots within these le, and ring fina 30×5 grid forlength, the thu5×5 grid with o an 8×10 grid
available for ent to create a dn displacemen
quation betweeree dimensiona
the displacemen on the x e. z axis) m
duced by apply
sing
ses were perfoA). For all analy
experiment wdentation testsands to create n and artificie 7. A standardndaries, shown
andmarks on thwhorls and va
indentation experind PQRS form the
ftware code prn in Figure 8. Pamming languference positioto the corners
ot was programpredefined tes
ngers, the progr a total of 150umb and the li125 test pointsof 80 test poi
the human andetailed softnesnt was measuren two pointsal space, given
ment. There or y directio
measured the ying a force of
ormed using Syses, statistical
was set in a sups were perform
softness mapsal hands. Tho
dized method wn as ABCD ahe palmar sidearious creases,
iments on the hume test boundaries
rogrammed in Programming wuage of the ABons, the tip of of the boundar
mmed to creatst boundaries. Fgram divided 0 test points. Dittle fingers ws each. The paints. Overall, 7d artificial hanss map. red by using s , , aby:
was negligions. The verti
amount of s1 N.
PSS (version l significance w
pine med s in ose was and e of
to
man that
the was BB the ries e a For the
Due were alm 780 nds
the and
(3)
ible ical kin
21, was
set at a of the performpost-hoTukey-Kmethod
Fig. 8. A setting thhands.
F. Skin
The sofderived using cMathWfrom thhand (Faveragecontour9a indicmm. Rewere obFigure 9with anartificia2.5 to 7WB concloser to
1Data are http://doi.
probability vaskin displac
med using one-c multiple comKramer Hon
d.
top-level descripthe indentation bou
n softness map
ftness maps od from the skicontour plots
Works, USA). Ae measured da
Figure 9). The e filter to smoor plots. The socated that the egions around bserved to hav9b and 9c shownd without thal hand with NB7.5 mm, the dindition were wo the human ha
available from the.org/10.5061/dryad
alue of p < 0.0cement data o-way analysis mparisons test
nestly Signifi
tion of the program
undaries, and for in
of the human in displaceme in a softw
A 2D colouredata and was sup
raw data wereothen the suddftness map of displacement
the proximal ive the least diw the softness mhe presence ofB condition hasplacements ofwithin 0.5 to and’s skin com
e Dryad Digital Red.vm4m4
5. A statisticalof the three of variance (At was performeicant Differen
m flow for calibrandenting the huma
and synthetic ent data and ware package
d contour plot perimposed on e processed widen gradient ch
the human has were withinnterphalangealisplacement onmaps of the artf the skeletonas displacemenf the artificial 6 mm and app
mpliance.
epository:
6
l comparison hands was
ANOVA)1. A ed using the nce (HSD)
ating the sensor, an and artificial
hands were were plotted (MATLAB, was created each type of
ith a moving hanges in the and in Figure n 0.2 to 5.75 l (PIP) joints n all fingers. tificial hands
n. While the nts within the hand having peared to be

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TN
Fighumhan
G.
Figthehasartdiswitsigindp <F(2p <forNBavebonwh14Tasofthethe
Fighumbonthe
NSRE-2014-00
g. 9. Skin softnessman hand; (b) artind with no bone str
Comparisons
gure 10 compae artificial hands the least ditificial hands. splacements ofthin each fin
gnificant differdex: F(2,447) =< 0.001; ring:2,372) = 375.7< 0.001. Post-r human vs. WB hands diffeerage displacemnes differed f
hile the artifici3% against the
aken together, ftest among the bony structue artificial han
g. 10. Skin displacman hand, artificines (NB). Post-hocgroups being com
0086
s maps from the inificial hand with bructure (NB).
s: human vs. ar
ares the displacds. It consistenisplacement, fA one-way A
f the three grounger and the rences: thumb:= 196.4, p < 0.: F(2,447) = 37, p < 0.001; a-hoc analyses
WB hands, humered significanments were cofrom 14% to ial hand withoe human hand
the artificial he three types re. However, d with bones w
cements at 1 N coial hand with bonc analyses show si
mpared for each of
ndentation tests wbone structure (W
rtificial hands
cements of the ntly shows thatfollowed by th
ANOVA was pups (human, W
palm. The a: F(2,372) = 2.001; middle: F399.8, p < 0.0and the palm: Fshowed that th
man vs. NB hantly at p < 0mpared, the ar47% against t
out bones diffefor every finghand without
of hands due tthe displacemewere closer to
onstant force (menes (WB) and artignificant differencthe fingers and the
with 1 N force forWB); and (c) artifi
human hand at the human hahe WB and Nperformed on
WB and NB hananalyses yield
222.8, p < 0.0F(2,447) = 344001; little fingF(2,237) = 128he displaceme
ands, and WB 0.001. When rtificial hand wthe human ha
ered from 54%ger and the palt bones was to the absenceents recorded the human ha
an and SEM) for tificial hand withces (p < 0.001) fore palm.
r (a) icial
and and NB the
nds) ded 01; 4.1, ger: 8.1, ents vs. the
with and,
% to lm. the
e of for
and.
the
h no r all
H. Reg
The getopogracomparhuman displace30×5 grthe firstthe palmcompareach setest hanhand bdisplaceregions pair for Figurthe indiindicatedifferenand the of the thand, wFigure data betshows fmissing
Fig. 11. Rdisplacemartificial suggestin
human ha
IV. PE
A. Par
A total years oSingapo
B. Exp
The pahand thhand. Wthe hair
gion-wise analy
eometrical struaphy of the srison was doneand artificial fement comparrid in the humt row of the artm, we dividedrison. A two-taet of human annds in pairs as based on the ement. That isof human and
r the tests. re 11 consolidividual test ree a noticeable nces were foune human hand. thick volar lig
which can be 1). In compartween the humfew regions ofg bone structure
Region-wise statistment data. (a) Hum
hand without bong no significant
and.
ERCEPTION EXP
rticipants
of 28 healthy old) were recrore. Participatio
perimental Des
articipants werhat touches theWe compared thry part of the
lysis
ucture of theskin tissue aree between specfingers to inverisons. For exa
man index fingetificial index fi
d the 8×10 gridailed paired t-tend artificial hahuman vs. WBregion of m
s, displacementd artificial han
dates the pairedegions. The sh
pattern of regnd (p > 0.05) This could be
gaments at the2 to 3 mm in
rison, the analman and NB arf similar skin ce.
tical comparison oman vs. artificial haones. The shadedifference betwe
PERIMENTS WIT
HANDS
subjects (20 mruited from thon was volunta
sign
re instructed tem is from a hheir responses forearm by thr
e bone and te not uniformcific regions inestigate their eample, the firser data was cofinger, and so od into 2×2 regest was performand data. We B hand, and humeasurement t data from eq
nds were consid
d t-test results haded areas ingions where nfor the WB ar
e attributed to e PIP joints ofn thickness [4lysis of skin drtificial hands compliance be
of human and artifand with bones and areas have p-
een the artificial
TH HUMAN AND
males, 8 femalhe National Uary.
to determine human hand or after they werree types of h
7
the external m. Hence, a n each of the ffects on the
st row of the mpared with
on. In case of gions for this med between matched the
uman vs. NB of the skin
quivalent test dered as one
by showing n Figure 11a o significant rtificial hand the presence f the human
40] (also see displacement (Figure 11b)
ecause of the
ficial hands skin nd (b) human vs. values > 0.05, hand from the
D ARTIFICIAL
les, all 17-26 University of
whether the r an artificial re touched at ands (Figure

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TN
12andartcoltemandsurnaïhanthe12b
Figbonsofttouof t
soft
Dtheexpon(i.eneiRatason thecermopoSyhelThequtriaeffwethachacon
NSRE-2014-00
a): a human had warm artiftificial hands hld artificial hanmperature tookd warm artificrface temperatïve to the hyponds that they we hands were kb; also see Sup
g. 12. Perception nes. (a) From left tft and warm artificched the participathe soft and cold a
ft and warm artifici
Detection theoe participant’speriments maye of the two ste. yes or no tither stimulus
ating experimensk. For the cur
a 5-point scae touch is fromrtain that the toouse, participanint scale. A
ystem, USA) wlp the experim
he applied forcually presentedals. The first 6fects. A total oere obtained. Tat at least 100 aracteristics (Rnclusion [41].
0086
and, a soft andficial hand whad the bone snd had no heatk the ambient ial hand was pture of 28.4°Cothesis of the will be touche
kept out of the pplementary Vi
experiments withto right: the humancial hand. (b) Exp
ants. (c) Receivingartificial hand and
ial hand and the hu
ory [41] states s ability to
y be distinguishtimulus classestask). The secis null (i.e. r
nts give more rrent paper, wele where 1 de
m an artificial houch is from ants entered theforce sensor
was positioned menter regulatece was about 1d in a pseudor
6 trials were diof 588 respons
This data set waobservations aROC) curve a
d cold artificialith the heatinstructure (§III.ting system andtemperature o
programmed wC (§II.F). The p
experiment and with. Duringview of the paideo).
h the human and n hand, soft and coperimental set-up g operating charac
the human hand.
uman hand.
that for expertell two stim
hed. The first is contains onlycond one is rerating experiminformation th
e asked particienotes that theyhand and 5 dena human hand. eir responses a(FingerTPS, at the particip
e the amount N. The three random order iscarded to accses (28 subjectas sufficient asare needed in ranalysis to dra
l hand, and a sng design. BH). The soft ad the skin surfa
of 21°C. The swith an initial sk
participants wnd to the typesg the experimearticipants (Figu
artificial hands wold artificial hand, where the test hateristics (ROC) cu(d) ROC curve of
riments involvmuli apart, ts detection whthe null stimu
ecognition whments on a scal
han in a “yes-nipants to respoy are certain t
notes that they With a compu
according to aPressure Prof
pant’s forearmof contact forhand types wfor a total of
count for practts, 21 trials eas it was suggesreceiver operataw a meaning
soft oth and face soft kin
were s of ent, ure
with and
ands urve f the
ing two here ulus here le). no” ond that are
uter a 5-file
m to rce.
were 27
tice ch)
sted ing
gful
C. Dat
We useof correhand (trtouch frbetweencomparmethodobserveis 0.5 anThe pro
D. Res
For eacTable I(very chuman curves. and micurve thAUC othat theas a toutouch frfrom the In codifficultthe humthe coldAUC iswarm a0.05 supass as
TABLE
Hand type
Human Cold Warm
For ovebasic desimple hook-tyamputee Contiare nowintelligedexterouamputeeobject's and thralso bee
ta processing
ed the ROC cuectly recognizerue positive) tofrom the human the two Ared with the med, the p-value wed sample AUCnd that the nul
obability select
sults
ch type of hanIII shows howertain to be phand). These A result that
istakenly recohat is coincidf 0.5. In other
e touch from anuch from a hrom the soft ane human hand ontrast, Figurety in recognizi
man hand (AUd hand was fous significantly
artificial hand, uggesting that t
if it were touch
III FREQUENCY(T
Very Certain to be
Prosthetic (1)
C
Pro
21 49 20
V. DIS
er a century, tesign. It has begrasping task
ype prosthesis hes [44]. inuing advancw convergingent prosthetic us grasping (ees according t
s size or shaperough experimen demonstrate
urve analysis [4ed touches by o the proportionan hand (false Areas Under tethod of Hanlewas determinedC is found whell hypothesis ated as significa
nd that was uw the subjectsprosthetic hand
data were furt cannot discriognized touch dent to a diagor words, an An artificial han
human hand. Fnd cold artifici(AUC = 0.697
e 12d suggestsing the soft andC = 0.562, p =
und to be less thdifferent from
the p-value wathe touch fromh from a huma
Y OF EACH RESPTOUCH RECOGN
Certain to be osthetic
(2)
Neutral
(3) 35 24 49 33 34 52
SCUSSION AND C
the prosthetic een a robust anks. However, has been high
cements from g towards th
devices. Prose.g. [21, 45, 46to their motor e can now be
ments on the rued that an artif
41] to relate ththe warm or cn of mistakenlypositive). The
the Curves (ey and McNeilld as the probaben the true popussumes that th
ant was p < 0.0
used to touch t recognized th
d) to 5 (very crther analyzediminate betwecorresponds
onal line and AUC closer to nd could not beFigure 12c shoial hand can b7, p < 0.0001). s that the partd warm artifici= 0.0611). Thehan 0.05 indicam an area of as found to be
m this artificialan hand.
PONSE FOR EACNITION)
Certain to be
Human (4)
Very t
Hu
65 46 45
CONCLUSION
hook [43] hasnd reliable termthe rejection at 50% among
several researhe developmensthetic hands 6]); it can be ccommands [6felt by an ampubber-hand illuficial hand can
8
he proportion cold artificial y recognized e differences (AUC) were l [42]. In this bility that the ulation AUC e area is 0.5. 5.
the subjects, hem from 1 certain to be
d using ROC een correctly to an ROC occupies an 0.5 suggests e recognized ows that the e recognized
ticipants had al hand from e p-value for ating that the 0.5. For the greater than l hand could
CH STIMULUS
y Certainto be uman (5)
Sum
51 196 19 196 45 196
s retained its minal tool for
rate for the g upper limb
rch domains nt of more can perform
controlled by , 47, 48]; an putee [7, 8]; usion, it has
n be felt as if

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TNSRE-2014-00086
9
it were a part of the body [12, 16, 49]. All these are giving upper limb amputees hope to regain what has been lost. Considering the technological trends above, it can be expected that prosthetic hands will touch and be touched by others during social interactions. To our knowledge, the current paper is the first to demonstrate that a warm and soft silicone artificial hand can be used to create an illusion of the sense of human touch. This was accomplished through a three-step process. First, participants were asked to select the samples that they felt were similar to human skin from artificial skin samples that were laid out in a 4×4 array. Majority selected a silicone material with a Shore durometer value of 30 at the OO scale and the selected temperatures clustered at 27 and 32°C in an ambient room temperature of 21°C. When proportioned, the selected temperature was calculated to be 28.4°C. Our results suggest that a soft rubber material with a warm skin surface temperature is critical for the artificial skin to be perceived as lifelike. Rubber materials are known to be poor conductors of heat. The thermal conductivities of the 4 materials tested herein were low with values from 0.12 to 0.23 W/m·K. However, it would be possible to mimic the warmth of the human hand’s skin tissue by controlling the embedded heater’s power supply by adjusting the heat that will be transmitted to the surface of a rubber material [27, 50]. A more lifelike artificial skin is the one having a surface temperature that is similar to the initial surface temperature of the human skin upon contact. This means that when a person touches a sample, it tends to feel more lifelike when the person does not experience a significant difference on the warming or cooling sensation on his/her finger at the moment of contact. The contact temperature will naturally rise and approach the human body temperature due to the elimination of the natural air convection from the exposed finger. Second, we described a method to replicate the geometric features of a human subject’s hand and the softness of the hand's skin tissue. Through CT scan, computer-aided design, 3D printing and silicone moulding technologies, we found that the softness of the human hand’s skin tissues can be mimicked by replicating the surface topology of the human hand and the geometries of its skeleton. The soft material selected in the 4×4 array experiment was used as a substitute for the human skin tissue. Due to the absence of ligaments and tendons like those in human hands, there were regions on the fingers and the palm that were softer than the human hand. Overall, the DIP and PIP regions were not significantly different from the human hand (p> 0.05). We used these regions of the artificial hand to touch the forearm of the participants. To integrate other mechatronic components for a more intelligent prosthetic hand, there is still substantial space that is available for mechanisms and embedded electronics at the skeleton and at the dorsal part of the hand. From our initial design, only 5-7 mm of artificial skin thickness are needed to be allocated for embedded heaters and for the soft material to replicate the human hand’s skin compliance. Finally, we combined the previous results to design the artificial hands for the perception experiments. Subjects who
were naïve about the experimental objectives were touched with a human hand and two artificial hands. One artificial hand was soft but it felt cold because the skin surface temperature was similar to that of the room temperature of 21°C. The other artificial hand felt warm due to the embedded heaters, which raised the skin surface temperature to 28.4°C. With the participants’ field of view being restricted, they were asked to recognize whether they were touched by a human or an artificial hand. The subjects were touched at the hairy part of the forearm where a subclass of unmyelinated afferents (C-tactile, CT) are known to be present [51]. The CT afferent has been implicated in the coding of pleasant tactile sensations. ROC curve analysis suggests that an illusion of human touch can be created from an artificial hand with embedded heaters on soft synthetic skin and a skeleton structure (AUC = 0.562; p = 0.0611). An early study suggested that friction and the surface topography of a material are significant factors when the human finger pad makes a sideward movement on a surface, which can further influence the sensation of pleasant touch [52]. The current paper only investigated simple touches of 1 N normal force and not the sliding touch movements that are similar to a caress. Such movements would entail controlled lateral movements of 1-10 cm/s [53]. Likewise, the fingerprint ridges and the sweat from the skin pores have been shown to contribute to the contact mechanics of sliding movements [54]. In future studies, it would be interesting to investigate the effects of artificial fingerprint ridges on the pleasantness of the touch through controlled lateral movements similar to a caress. More advanced touching movements, like caress and handshakes, have social, emotional, and cultural ramifications. The present work focused only on simple mechanical touch. Despite its seeming simplicity, social touching for artificial hands has been a neglected research area. From the experiments described herein, we found that softness and warmth as important features. Future work can look into the other design variables that can make social touches (e.g. handshake or caress on the face, the hands, and arms) non-discriminable even through an artificial hand. Interpersonal touch induces strong and reliable changes in autonomic activity (e.g. skin conductance, pulse and respiration) between the interacting partners [55]. A possible extension to the current work is to investigate the emotional valence of the touch from a lifelike artificial hand. That is, we might be able to see effects of this novel type of prosthetic hand for affective touches. There have been related works on determining the emotional state of participants by touch from haptic interfaces. Some of the earlier works have explored that idea with a haptic jacket [56] or a haptic sleeve like in our earlier work [57]. However, there have been none for prosthetic or robotic hands. In the Affective Teletouch Technology that we proposed [57], we asked participants to watch a sad movie while the spouse touched the arm of the participant. In the other experimental condition, we used a haptic sleeve to provide vibratory and warmth stimuli on the subject’s arm. A similar experimental design could be used for

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TNSRE-2014-00086
10
the soft and warm artificial hand as described herein. For practical implementation later on, it would be helpful to consider a layered skin structure that addresses the multiple requirements to have soft features for social touching [28], for skin compliance and skin conformance for tactile sensing purposes [58] as well as the need to protect the underlying structures through a tough skin layer [50]. In an earlier work [29], we investigated how to design a soft skin for social touching interactions, which also considers other requirements for wear, puncture, and tear. For the condition of having a softer internal material and a stiffer external material with a 0.8 mm thin layer, we found that the results of a layered structure will only have a difference in displacement of about 7% as compared to a structure that is homogeneous. These previous findings suggest that it would be possible to achieve both skin softness as well as toughness by varying the properties of the skin layers. The present results are important because they provide an early evidence that an illusion of human touch can be created by a warm and soft silicone artificial hand to the person being touched. When applied to prosthetic hands, these findings have a potential to help prosthesis users cope with the functional and psychosocial effects of losing a part of their body.
ACKNOWLEDGMENT
The authors are grateful to Jaclyn Ting Lim for the illustrations.
REFERENCES [1] C. A. Moran, "Anatomy of the hand," Phys Ther, vol. 69, pp. 1007-13,
1989. [2] C. L. Taylor and R. J. Schwarz, "The anatomy and mechanics of the
human hand," Artif Limbs, vol. 2, pp. 22-35, 1955. [3] Y. Lanir, "Skin Mechanics," in Handbook of Bioengineering, R. Skalak
and S. Chien, Eds., ed New York: McGraw-Hill, 1987, pp. 1-25. [4] R. S. Johansson and A. B. Vallbo, "Tactile sensibility in the human
hand: Relative and absolute densities of four types of mechanoreceptive units in glabrous skin," Journal of Physiology, vol. Vol. 286, pp. 283-300, 1979.
[5] M. J. Hertenstein, D. Keltner, B. App, B. A. Bulleit, and A. R. Jaskolka, "Touch communicates distinct emotions," Emotion, vol. 6, pp. 528-533, 2006.
[6] T. A. Kuiken, P. D. Marasco, B. A. Lock, R. N. Harden, and J. P. A. Dewald, "Redirection of cutaneous sensation from the hand to the chest skin of human amputees with targeted reinnervation," Proceedings of the National Academy of Sciences of the United States of America, vol. 104, pp. 20061-20066, 2007.
[7] P. D. Marasco, K. Kim, J. E. Colgate, M. A. Peshkin, and T. A. Kuiken, "Robotic touch shifts perception of embodiment to a prosthesis in targeted reinnervation amputees," Brain, vol. 134, pp. 747-758, 2011.
[8] S. Raspopovic, M. Capogrosso, F. M. Petrini, M. Bonizzato, J. Rigosa, G. Di Pino, et al., "Restoring Natural Sensory Feedback in Real-Time Bidirectional Hand Prostheses," Science Translational Medicine, vol. 6, p. 222ra19, February 5, 2014 2014.
[9] D. M. Desmond, "Coping, affective distress, and psychosocial adjustment among people with traumatic upper limb amputations," Journal of Psychosomatic Research, vol. 62, pp. 15-21, 2007.
[10] I. Dudkiewicz, R. Gabrielov, I. Seiv-Ner, G. Zelig, and M. Heim, "Evaluation of prosthetic usage in upper limb amputees," Disability and Rehabilitation, vol. 26, pp. 60-63, 2004.
[11] A. Saradjian, A. R. Thompson, and D. Datta, "The experience of men using an upper limb prosthesis following amputation: Positive coping and minimizing feeling different," Disability and Rehabilitation, vol. 30, pp. 871-883, 2008.
[12] M. Botvinick and J. Cohen, "Rubber hands 'feel' touch that eyes see," Nature, vol. 391, p. 756, 1998.
[13] H. H. Ehrsson, C. Spence, and R. E. Passingham, "That's my hand! Activity in premotor cortex reflects feeling of ownership of a limb," Science, vol. 305, pp. 875-877, 2004.
[14] H. H. Ehrsson, K. Wiech, N. Weiskopf, R. J. Dolan, and R. E. Passingham, "Threatening a rubber hand that you feel is yours elicits a cortical anxiety response," Proceedings of the National Academy of Sciences of the United States of America, vol. 104, pp. 9828-9833, 2007.
[15] M. Tsakiris and P. Haggard, "The rubber hand illusion revisited: Visuotactile integration and self-attribution," Journal of Experimental Psychology: Human Perception and Performance, vol. 31, pp. 80-91, 2005.
[16] H. H. Ehrsson, B. Rosén, A. Stockselius, C. Ragnö, P. Köhler, and G. Lundborg, "Upper limb amputees can be induced to experience a rubber hand as their own," Brain, vol. 131, pp. 3443-3452, 2008.
[17] M. Tsakiris, L. Carpenter, D. James, and A. Fotopoulou, "Hands only illusion: Multisensory integration elicits sense of ownership for body parts but not for non-corporeal objects," Experimental Brain Research, vol. 204, pp. 343-352, 2010.
[18] J. J. Cabibihan, "Patient-specific prosthetic fingers by remote collaboration-A case study," PLoS ONE, vol. 6, 2011.
[19] A. D. Deshpande, X. Zhe, M. J. V. Weghe, B. H. Brown, J. Ko, L. Y. Chang, et al., "Mechanisms of the Anatomically Correct Testbed Hand," Mechatronics, IEEE/ASME Transactions on, vol. 18, pp. 238-250, 2013.
[20] E. L. Leow, B. P. Pereira, A. K. Kour, and R. W. H. Pho, "Lifelikeness in multilayered digital prostheses," Prosthetics and Orthotics International, vol. 21, pp. 40-51, 1997.
[21] C. Connolly, "Prosthetic hands from Touch Bionics," Industrial Robot, vol. 35, pp. 290-293, 2008.
[22] C. D. Murray, "The social meanings of prosthesis use," J Health Psychol, vol. 10, pp. 425-41, 2005.
[23] S. Ritchie, S. Wiggins, and A. Sanford, "Perceptions of cosmesis and function in adults with upper limb prostheses: A systematic literature review," Prosthetics and Orthotics International, vol. 35, pp. 332-341, 2011.
[24] J. Davidson, "A survey of the satisfaction of upper limb amputees with their prostheses, their lifestyles, and their abilities," Journal of Hand Therapy, vol. 15, pp. 62-70, 2002.
[25] A. Esquenazi, "Amputation rehabilitation and prosthetic restoration. From surgery to community reintegration," Disability and Rehabilitation, vol. 26, pp. 831-836, 2004.
[26] P. Gallagher and M. MacLachlan, "Adjustment to an artificial limb: A qualitative perspective," Journal of Health Psychology, vol. 6, pp. 85-100, 2001.
[27] J.-J. Cabibihan, R. Jegadeesan, S. Salehi, and S. Ge, "Synthetic Skins with Humanlike Warmth," in Social Robotics. vol. 6414, S. S. Ge, H. Li, J.-J. Cabibihan, and Y. Tan, Eds., ed: Springer Berlin Heidelberg, 2010, pp. 362-371.
[28] J. J. Cabibihan, S. Pattofatto, M. Jomaa, A. Benallal, and M. C. Carrozza, "Towards Humanlike Social Touch for Sociable Robotics and Prosthetics: Comparisons on the Compliance, Conformance and Hysteresis of Synthetic and Human Fingertip Skins," International Journal of Social Robotics vol. 1, pp. 29-40, 2009.
[29] J. J. Cabibihan, R. Pradipta, and S. S. Ge, "Prosthetic finger phalanges with lifelike skin compliance for low-force social touching interactions," Journal of Neuroengineering and Rehabilitation, vol. 8, p. 16, 2011.
[30] D. H. Kim, J. Viventi, J. J. Amsden, J. Xiao, L. Vigeland, Y. S. Kim, et al., "Dissolvable films of silk fibroin for ultrathin conformal bio-integrated electronics," Nature materials, vol. 9, pp. 511-517, 2010.
[31] S. C. B. Mannsfeld, B. C. K. Tee, R. M. Stoltenberg, C. V. H. H. Chen, S. Barman, B. V. O. Muir, et al., "Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers," Nature Materials, vol. 9, pp. 859-864, 2010.
[32] R. F. Shepherd, F. Ilievski, W. Choi, S. A. Morin, A. A. Stokes, A. D. Mazzeo, et al., "Multigait soft robot," Proceedings of the National Academy of Sciences, vol. 108, pp. 20400-20403, 2011.
[33] F. Tramacere, A. Kovalev, T. Kleinteich, S. N. Gorb, and B. Mazzolai, "Structure and mechanical properties of Octopus vulgaris suckers," Journal of the Royal Society, Interface, vol. 11, 2014.
[34] J. H. Lienhard, IV and J. H. Lienhard, V, A heat transfer textbook. Cambridge, MA: Phlogiston Press, 2008.
[35] L. A. Jones and H. N. Ho, "Warm or cool, large or small? The challenge of thermal displays," IEEE Transactions on Haptics, vol. 1, pp. 53-70, 2008.

1534-4320 (c) 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TNSRE.2014.2360533, IEEE Transactions on Neural Systems and Rehabilitation Engineering
TN
[36
[37
[38
[39
[40
[41
[42
[43[44
[45
[46
[47
[48
[49
[50
[51
[52
[53
[54
[55
[56
[57
[58
NSRE-2014-00
6] H. N. Ho and Lsurface during Engineering, vo
7] H. N. Ho and discrimination app. 118-128, 20
] Department of Washington, DC
9] R. Friedman, estimation of so142, 2008.
0] A. Lluch, "IntriJoint stiffness ofMosby, Dunitz,
] N. A. MacmillGuide: Taylor &
2] J. A. Hanley anreceiver operati29-36, 1982.
] D. W. Dorrance4] E. Biddiss, D.
upper limb pTechnology, vo
] S. Roccella, M.Dario, et al., "humanoid emHumanoid Robo
6] C. Cipriani, Mtransradial prosvol. 8, 2011.
7] M. Powell, R.Recognition-BaMovement ConRehabilitation 2013.
] N. V. ThakorTranslational M
9] H. H. Ehrsson, hand: Feeling multisensory br10573, 2005.
0] J. J. CabibihanHakkim, "ApReplacement MDuplication, PC
] H. Olausson, YStarck, et al., "Uinsular cortex,"
2] A. Klöcker, MThonnard, "Phyexploration," PL
] L. S. Löken, J."Coding of pleaNeuroscience, v
4] M. J. Adams, SAndré, et al., "Fof the Royal Soc
] J. Chatel-Goldmincreases autonBehavioral Neu
6] D. TsetserukoCommunicationPerceiving TangW. Bergmann THeidelberg, 201
7] J.-J. Cabibihan,Robotics. vol. 7M.-A. Williams356.
] J. Cabibihan, SSkin's Thicknes
0086
L. A. Jones, "Modhand-object inte
ol. 130, 2008. L. A. Jones, "Co
and localization," 006. f Defense, "HumaC2000. K. Hester, B. G
oftness," Experime
insic causes of stiof the upper limb, S 1997, pp. 259-26lan and C. D. C& Francis, 2005. d B. J. McNeil, "Ting characteristic (
e, "Artificial hand,Beaton, and T. C
prosthetics," Disal. 2, pp. 346-357, 2. C. Carroza, G. C"Design and deveotion expressionotics, vol. 4, pp. 18
M. Controzzi, andthesis," Journal of
. Kaliki, and N. ased Myoelectric nsistency and DiEngineering, IEE
, "Translating thMedicine, vol. 5, p.
N. P. Holmes, andof body owner
rain areas," Journa
n, S. S. Ge, S. Sparatuses, Syste
Manufacturing, TemCT/SG2011/00025Y. Lamarre, H. BUnmyelinated tactNature Neuroscie
M. Wiertlewski, ysical factors inflLoS ONE, vol. 8, 2 Wessberg, I. Mo
asant touch by unmvol. 12, pp. 547-54S. A. Johnson, P. Finger pad frictionciety, Interface, voman, M. Congedo,nomic coupling beuroscience, vol. 8, ou, "HaptiHug: n of Hug over a Dgible Sensations. vTiest, and F. T. va10, pp. 340-347. L. Zheng, and C.
7621, S. Ge, O. Khs, Eds., ed: Sprin
S. S. Chauhan, anss on the Subsurf
deling the thermal eractions," Journa
ontribution of therPerception and Ps
an Engineering D
Green, and R. Lental Brain Resear
ffness of the interS. Copeland, Ed., 4.
Creelman, Detectio
The meaning and u(ROC) curve," Ra
" 1912. Chau, "Consumer ability and Reha2007.
Cappiello, J. J. Cabelopment of five-n robot," Intern81-206, 2007. d M. C. Carrozzf NeuroEngineerin
Thakor, "User Prostheses: Improstinguishability,"
EE Transactions o
he Brain-Machine. 210ps17, Novemd R. E. Passinghamrship is associatal of Neuroscience
Salehi, R. Jegadeems and Methomperature Regulat5," 2011.
Backlund, C. Mortile afferents signaence, vol. 5, pp. 90V. Théate, V. Hluencing pleasant 2013. orrison, F. McGlomyelinated afferent48, 2009. Lefèvre, V. Léves
n and its role in griol. 10, p. 20120467, C. Jutten, and J.
etween romantic p2014-March-27 20
A Novel HDistance," in Hapvol. 6191, A. L. Kan der Helm, Eds
Cher, "Affective Thatib, J.-J. Cabibih
nger Berlin Heidel
nd S. Suresh, "Effface Pressure Prof
responses of the sal of Biomechan
rmal cues to matesychophysics, vol.
Design Data Dige
LaMotte, "Magnitrch, vol. 191, pp. 1
rphalangeal joints,ed St. Louis, Lond
on Theory: A Us
use of the area undadiology, vol. 143,
design priorities abilitation: Assis
bibihan, C. Laschifingered hands fo
national Journal
za, "The SmartHng and Rehabilitat
Training for Patoving Phantom LNeural Systems
on, vol. PP, pp.
e Interface," Sciember 6, 2013 2013.m, "Touching a rubted with activitye, vol. 25, pp. 105
eesan, and H. Abods for Prosthtion and Tactile Se
rin, B. G. Wallin,al touch and projec00-904, 2002. Hayward, and J.
touch during tac
ne, and H. Olausts in humans," Na
sque, V. Haywardip and touch," Jour7, 2013. -L. Schwartz, "To
partners," Frontier014.
Haptic Display ptics: Generating Kappers, J. F. van E
., ed: Springer Be
Tele-touch," in Sohan, R. Simmons, lberg, 2012, pp. 3
fects of the Artififiles of Flat, Curv
skin nical
erial 68,
est,"
tude 133-
," in don:
ser's
der a pp.
for stive
i, P. or a
of
Hand tion,
ttern imb and 1-1,
ence
bber y in 564-
bdul hetic ense
, G. ct to
L. ctile
son, ture
d, T. rnal
ouch rs in
for and Erp, erlin
ocial and
348-
icial ved,
and 201
2013, heEngineerialso serveAffiliate (SiNAPSEJournal oBionics aa past ChChapter organizatiConferencInternatioChair of Intelligentechnologrobotics.
India. Curesearch machine processin
ComputatComputat
Braille Surfaces,4.
John-JohbiomedicPisa, Italan InternSupérieuLaboratocurrentlyEngineer
e was an Assisting Department oed as the Deputy Faculty Member E). Currently, he
of Social Roboticand the Internationhair of the IEEE S(terms: 2011 an
tions: he was thce on Social Ro
onal Conference onf the 2013 IEEEnt Systems, Mangies towards lifeli
Deepak and M. from IndPhD degof TechnInstitute research (NUS), b
urrently, he is on leat University of interface, machin
ng.
Yeshwindegree UniversiAutomatworkingMakino industria
Mark AaResearchNational the Cryospostdoctoheat trans
ArrchanaElectricaUniversihas beenOptimizaDepartmthe same
tional Intelligenction, in particular.
" Sensors Journa
hn Cabibihan wcal robotics by thly in 2007. Duringnational Scholarshure de Cachan, Foire de Mécaniquy affiliated with thring Department otant Professor at
of the National UnDirector of the Soat the Singaporeserves at the Edi
s, Computational nal Journal of AdvSystems, Man andnd 2012). He h
he Program Co-Cobotics, Singaporn Social Robotics
E International Cnila, Philippines. ike touch and ge
Joshi did B. TechTech in Instrume
dia in 2004 and gree in biomedical nology (IIT) Delhof Neuroscience engineer at na
before joining Greave from the uniOregon, USA. Hie learning, biome
n Mysore Srinivasin Electrical E
ity of Singaportion and Control
g as a Research Asia Pte Ltd.
al robotics and hig
aron Chan is a R, Germany. He rUniversity of Sinspheric Sciences Loral fellow. His msfer and thermal m
a Murugananthamal Engineering wity of Singapore, Sn pursuing her Phation using Evo
ment of Electrical e university. Her cce and Robotics,
al, IEEE, vol. 14,
was conferred wihe Scuola Superi
g his PhD studies, hhip grant by the France, which h
ue et Technologiehe the Mechanicaof Qatar Universityt the Electrical niversity of Singaocial Robotics Labe Institute of Neuitorial Board of thCognitive Scienc
vanced Robotics Sd Cybernetics Sochas been active Chair of the 201re; Program Chais at Chengdu, ChinConference on C
He is workingestures for prosthe
h in Instrumentatientation and cont2006, respectivelengineering from
hi. He was a vis(ION), Newcastle
ational university raphic Era Univeriversity to pursue his research area i
edical instrumentat
sa received his MaEngineering from
re, with a spl Engineering. H
and DevelopmenHis research in
gh-speed motion co
Research Engineerreceived his PhD.ngapore. SubsequeLaboratory at NA
main research intermanagement of elec
m received the Bwith Honors fromSingapore in 2012.hD on Dynamic
olutionary Algoritand Computer Encurrent research i, in general and
11
pp. 2118-2128,
ith a PhD in iore Sant’Anna, he was awarded Ecole Normale e spent at the
e in 2004.He is al and Industrial y. From 2008 to and Computer
apore, where he boratory and an urotechnologies he International ce, Frontiers in ystems. He was
ciety, Singapore in conference
10 International ir of the 2012 na; and General
Cybernetics and g on the core etics and social
ion engineering trol engineering ly. He received
m Indian Institute iting scholar at
e University and y of Singapore rsity, Dehradun his postdoctoral includes neural-tion, and signal
aster of Science the National
ecialization in He is presently nt Engineer at
nterests include ontrol systems.
r at GE Global . in 2010 from ently, he joined
ASA GSFC as a rests are boiling ctronics.
.Eng degree in m the National Since then, she Multi-objective
thms with the ngineering from nterests include d Evolutionary
Related Documents











